Practica No. 2 MODELADO DE UN MOTOR DC. Pontificia Universidad Javeriana Facultad de Ingeniería Departamento de Electrónica Laboratorio de Control
|
|
|
- Veronica Miguélez Maidana
- hace 6 años
- Vistas:
Transcripción
1 Practica No. 2 MODELADO DE UN MOTOR DC Pontificia Universidad Javeriana Facultad de Ingeniería Departamento de Electrónica Laboratorio de Control 1. Introducción En esta práctica se realiza la formulación matemática, medición, estimación de parámetros y validación del modelo electromecánico del motor DC del entrenador QET de QUANSER (DCMT). 2. Objetivos Validar el modelado físico de un motor D.C. controlado por armadura. Estimar parámetros característicos del modelo. Ajustar un modelo aproximado de primer orden de un motor D.C. Expresar el modelo lineal del motor en función de transferencia y variables de estado. 3. Equipo Necesario 3 Pares de cables RCA-RCA Entrenador QET DCMCT Tarjeta de Adquisición Q4/Q8 de Quanser Software Matlab*, Simulink*, QuaRC * Matlab y Simulink están disponibles en el laboratorio de Control (Ed. Ingeniería, lab. 613) 4. Trabajo Previo Considere el modelo electro-mecánico de un motor D.C. de la Figura 1 Figura 1. Modelo de un motor D.C. 4.1 Consulte y determine las ecuaciones diferenciales y el modelo en espacio de estados que describe el sistema. 4.2 Encuentre la función de transferencia del sistema tomando como entrada el voltaje y como salida la velocidad angular. De qué orden es el sistema? Qué se debe cumplir para que el sistema sea estable? 1
, revise los valores nominales de los parámetros del modelo. Con base en estos datos, halle el modelo nominal del motor.")
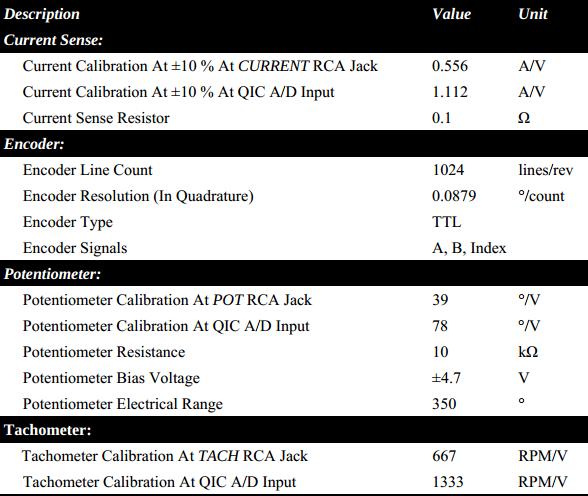
2 4.3 Descargue del sitio web del laboratorio de control el Documento de especificaciones del entrenador QET DCMT. Nota: La clave del documento es R3C3A En la Tabla 1 (Anexo), revise los valores nominales de los parámetros del modelo. Con base en estos datos, halle el modelo nominal del motor. Grafique la respuesta a entrada paso unitario del sistema y su respuesta en frecuencia. 4.5 Bajo qué hipótesis es posible aproximar la función de transferencia encontrada en el apartado 4.2. a un modelo de primer orden? Aproxime el modelo obtenido a la siguiente función de transferencia: Indique los valores numéricos de K y 4.6 Lea el documento de especificaciones del motor Cuál es el voltaje mínimo de encendido del motor? Entre qué valores de voltaje trabaja el entrenador QET? Nota: Es importante que al momento de realizar cualquier simulación, no se sobrepasen los valores máximos de operación. De acuerdo con el fabricante complete la siguiente tabla: Puerto del módulo que censa la variable Valor de la constante de calibración Unidades Velocidad Corriente Tabla Realice una simulación en malla abierta del sistema de primer orden, use una entrada tipo paso y observe a la salida el voltaje, velocidad y corriente. Obtenga el diagrama de Bode del sistema y simular las saturaciones del motor (Curva de voltaje de entrada contra velocidad de salida). 5. Procedimiento Estimación de Parámetros (Caracterización estática). 5.1 Verifique que el Jumper J6 se encuentre conectado en el pin central y el derecho Conecte el adaptador al puerto Power




3 5.3 Conecte la salida analógica 0 de la tarjeta Q4/Q8 al puerto COMMAND del módulo DCMCT. 5.4 Conecte la entrada analógica 0 de la tarjeta Q4/Q8 al puerto TACH y la entrada analógica 1 de la tarjeta Q4/Q8 al puerto CURRENT del módulo DCMCT. 5.5 En Matlab abra Simulink dando clic en Cree un nuevo modelo en Simulink 5.7 En el Library browser ubique la librería QUARC Targets



4 5.8 Despliegue la librería y en Data acquisition->generic -> Configuration, arrastre el icono de HIL Initialize. 5.9 Ahora debe implementar en el modelo de Simulink dos bloques HIL Read Analog y un bloque HIL Write Analog. Despliegue la librería QUARC Targets -> Data Adquisition -> Generic -> Inmediate I/O. Allí encontrara estos bloques Para verificar que los canales coinciden con las conexiones realizadas anteriormente, haga doble clic sobre Read Analog o Write Analog y en el cuadro channels puede cambiar la configuración.


 e implemente un scope. 5.16 Compile el modelo de Simulink.")
5 5.11 Aplique como entrada al motor, y a su modelo, una entrada tipo paso con un Step time de 1s Abra el menú Simulation -> configuration parameters -> Fixed Step size y digite En los bloques de HIL Write analog y Read Analog también debe cambiar el tiempo de muestreo por 0.01 dando doble clic sobre los mismos Usando un bloque transfer function, implemente la función de transferencia hallada en la sección 4.5 Se debe tener en cuenta la ganancia del amplificador lineal interno? 5.15 Con ayuda de un Mux visualice las dos señales al tiempo (HIL y Transfer function) e implemente un scope Compile el modelo de Simulink. QUARC -> build 5.17 Cambie a modo de señal External con 8 segundos de toma de datos 5.18 De clic sobre el icono conect to target Después de clic en el icono play 5.20 Abra un scope para ver los resultados de la simulación.
6 5.21 Coloque un valor DC a la entrada del sistema de 0V. Mida en este punto la corriente de armadura Realice un bloqueo en el eje del motor y varíe el voltaje de armadura de acuerdo con la siguiente tabla Tabla Discuta con sus compañeros y su profesor cómo estimar el valor del parámetro a partir de este experimento. Cuál es la diferencia porcentual del resultado obtenido con el dato del fabricante? 5.24 Cómo se considera el efecto del amplificador de ganancia 3 a la entrada? 5.25 Con el eje del motor libre para girar, varíe el voltaje de armadura de acuerdo con la siguiente tabla
7 Tabla Discuta con sus compañeros y su profesor cómo estimar el valor del parámetro a partir de este experimento Cuál es la diferencia porcentual de este valor con el nominal del motor? Estimación de parámetros (caracterización dinámica) Con los valores experimentales de y actualice su función de transferencia de primer orden en el bloque de simulink Aplique como entrada al motor, y a su modelo, una entrada tipo tren de pulsos con amplitud de 3V pp, ciclo útil 50%, 0,5Hz de frecuencia, sin offset Con un multiplexor y un scope, visualice la entrada conectada al puerto TACH y la velocidad simulada dada por la función de transferencia hallada Compile el modelo de Simulink 5.32 Compare la velocidad de salida del módulo DCMTC y la del modelo. 6. Análisis de resultados Realice un informe en formato de artículo IEEE, en el que incluya una breve explicación de los procedimientos y experimentos realizados, las tablas y resultados obtenidos, el análisis de los resultados y conclusiones. 7. Bibliografía Sistemas de Control Automático. Benjamin C. Kuo. Prentice Hall; séptima edición Modern Control Engineering. P.N. Paraskevopoulos. CRC Press; primera edición Ingeniería de Control Moderna. Katsuhiko Ogata. Prentice Hall; cuarta edición Documento de especificaciones (Disponible en la página de Laboratorio de Control) DCMCT/USB QICii Hardware Guide. 7

8 ANEXO 8
Electrónica II. Guía 4
 Electrónica II. Guía 4 1 Facultad: Ingeniería. Escuela: Electrónica. Asignatura: Electrónica II. Lugar de ejecución: Fundamentos Generales (Edificio 3, 2da planta). COMPARADORES Objetivo General Verificar
Electrónica II. Guía 4 1 Facultad: Ingeniería. Escuela: Electrónica. Asignatura: Electrónica II. Lugar de ejecución: Fundamentos Generales (Edificio 3, 2da planta). COMPARADORES Objetivo General Verificar
CONSULTA PREVIA La información necesaria para el desarrollo de la práctica, se encuentra disponible al menos en las siguientes referencias.
 OBJETIVOS. Entender el comportamiento y las características del amplificador operacional.. Medir ganancia, impedancia de entrada y salida de las configuraciones básicas del amplificador operacional: amplificador
OBJETIVOS. Entender el comportamiento y las características del amplificador operacional.. Medir ganancia, impedancia de entrada y salida de las configuraciones básicas del amplificador operacional: amplificador
EL AMPLIFICADOR CON BJT
 1 Facultad: Estudios Tecnologicos. Escuela: Electrónica. Asignatura: Electronica Analogica Discresta. EL AMPLIFICADOR CON BJT Objetivos específicos Determinar la ganancia de tensión, corriente y potencia
1 Facultad: Estudios Tecnologicos. Escuela: Electrónica. Asignatura: Electronica Analogica Discresta. EL AMPLIFICADOR CON BJT Objetivos específicos Determinar la ganancia de tensión, corriente y potencia
El controlador On-Off (si-no o todo y nada).
.") 1 Facultad: Ingeniería. Escuela: Electrónica. Asignatura: Sistemas de Control Automático. Lugar de ejecución: Instrumentación y Control (Edificio 3, 2da planta). El controlador On-Off (si-no o todo y nada).
1 Facultad: Ingeniería. Escuela: Electrónica. Asignatura: Sistemas de Control Automático. Lugar de ejecución: Instrumentación y Control (Edificio 3, 2da planta). El controlador On-Off (si-no o todo y nada).
Controladores tipo P, PI y PID
 Sistemas de Control Automático. Guía 6 1 Facultad: Ingeniería. Escuela: Electrónica. Asignatura: Sistemas de Control Automático. Lugar de ejecución: Instrumentación y Control (Edificio 3, 2da planta).
Sistemas de Control Automático. Guía 6 1 Facultad: Ingeniería. Escuela: Electrónica. Asignatura: Sistemas de Control Automático. Lugar de ejecución: Instrumentación y Control (Edificio 3, 2da planta).
Técnicas Avanzadas de Control Memoria de ejercicios
 Memoria de ejercicios Curso: 2007/08 Titulación: Ingeniero Técnico Industrial Especialidad: Electrónica Industrial Alumno: Adolfo Hilario Tutor: Adolfo Hilario Caballero Índice general Presentación. 2..
Memoria de ejercicios Curso: 2007/08 Titulación: Ingeniero Técnico Industrial Especialidad: Electrónica Industrial Alumno: Adolfo Hilario Tutor: Adolfo Hilario Caballero Índice general Presentación. 2..
Adquisición de Datos usando Matlab
 21 Adquisición de Datos usando Matlab Bruno Vargas Tamani Facultad de Ingeniería Electrónica y Eléctrica, Universidad Nacional Mayor de San Marcos, Lima, Perú RESUMEN: La interconexión a nivel de computadoras
21 Adquisición de Datos usando Matlab Bruno Vargas Tamani Facultad de Ingeniería Electrónica y Eléctrica, Universidad Nacional Mayor de San Marcos, Lima, Perú RESUMEN: La interconexión a nivel de computadoras
INTRODUCCION A SIMULINK
 INTRODUCCION A SIMULINK Matlab (Matrix Laboratory) es un sistema basado en matrices para realizar cálculos matemáticos y de ingeniería. Entre las múltiples herramientas que presenta este programa se encuentra
INTRODUCCION A SIMULINK Matlab (Matrix Laboratory) es un sistema basado en matrices para realizar cálculos matemáticos y de ingeniería. Entre las múltiples herramientas que presenta este programa se encuentra
Proyecto: Control de motor de corriente directa Como parte de este proyecto deben llevarse a cabo las siguientes actividades:
 Proyecto: Control de motor de corriente directa Diseño de un convertidor dc-dc. Definir configuración. Calcular parámetros iniciales de los elementos del convertidor a partir de la representación matemática
Proyecto: Control de motor de corriente directa Diseño de un convertidor dc-dc. Definir configuración. Calcular parámetros iniciales de los elementos del convertidor a partir de la representación matemática
Amplificador inversor y no inversor
 Facultad Escuela Lugar de Ejecución : Ingeniería. : Electrónica : Fundamentos Generales (Edificio 3, 2da planta) Amplificador inversor y no inversor Objetivo General Implementar los circuitos amplificadores
Facultad Escuela Lugar de Ejecución : Ingeniería. : Electrónica : Fundamentos Generales (Edificio 3, 2da planta) Amplificador inversor y no inversor Objetivo General Implementar los circuitos amplificadores
PRACTICA Nº 1 MEDICIONES SOBRE CIRCUITOS ELECTRONICOS
 UNIVERSIDAD SIMON BOLIVAR DPTO. ELECTRONICA Y CIRCUITOS CIRCUITOS ELECTRONICOS I EC1177 PRACTICA Nº 1 MEDICIONES SOBRE CIRCUITOS ELECTRONICOS OBJETIVO Familiarizar al estudiante con los conceptos fundamentales
UNIVERSIDAD SIMON BOLIVAR DPTO. ELECTRONICA Y CIRCUITOS CIRCUITOS ELECTRONICOS I EC1177 PRACTICA Nº 1 MEDICIONES SOBRE CIRCUITOS ELECTRONICOS OBJETIVO Familiarizar al estudiante con los conceptos fundamentales
Resistores en circuitos eléctricos
 Resistores en circuitos eléctricos Experimento : Resistencias en circuitos eléctricos Estudiar la resistencia equivalente de resistores conectados tanto en serie como en paralelo. Fundamento Teórico. Cuando
Resistores en circuitos eléctricos Experimento : Resistencias en circuitos eléctricos Estudiar la resistencia equivalente de resistores conectados tanto en serie como en paralelo. Fundamento Teórico. Cuando
Práctica No 0: Parte C El Osciloscopio y el Generador de Señales
 Universidad Nacional Experimental del Táchira. Departamento de Ingeniería Electrónica. Núcleo de Instrumentación y Control. Bioinstrumentación I Revisada por: Prof. Rafael Volcanes, Prof. Lisbeth Román.
Universidad Nacional Experimental del Táchira. Departamento de Ingeniería Electrónica. Núcleo de Instrumentación y Control. Bioinstrumentación I Revisada por: Prof. Rafael Volcanes, Prof. Lisbeth Román.
LABORATORIO No. 3 MODELAMIENTO Y ANALISIS DINAMICO DE SISTEMAS ELECTRICOS
 UNIVERSIDAD FRANCISCO DE PAULA SANTANDER FACULTAD DE INGENIERIA INGENIERÍA ELECTRÓNICA 1 SISTEMAS DINAMICOS 1160601 LABORATORIO No. 3 MODELAMIENTO Y ANALISIS DINAMICO DE SISTEMAS ELECTRICOS INSTRUCCIONES
UNIVERSIDAD FRANCISCO DE PAULA SANTANDER FACULTAD DE INGENIERIA INGENIERÍA ELECTRÓNICA 1 SISTEMAS DINAMICOS 1160601 LABORATORIO No. 3 MODELAMIENTO Y ANALISIS DINAMICO DE SISTEMAS ELECTRICOS INSTRUCCIONES
LABORATORIO DE ELEMENTOS DE ELECTRONICA
 Práctica 7 Diodos y sus aplicaciones 7.2.3 Utilice el programa simulador para probar los circuitos de la Figura 7.2.2. Para cada uno, indique el tipo de circuito de que se trata y obtenga la gráfica de
Práctica 7 Diodos y sus aplicaciones 7.2.3 Utilice el programa simulador para probar los circuitos de la Figura 7.2.2. Para cada uno, indique el tipo de circuito de que se trata y obtenga la gráfica de
Objetivos generales. Objetivos específicos. Materiales y equipo. Introducción Teórica DIODO DE UNION
 Electrónica I. Guía 1 1 Facultad: Ingeniería. Escuela: Electrónica. Asignatura: Electrónica I. Lugar de ejecución: Fundamentos Generales (Edificio 3, 2da planta). DIODO DE UNION Objetivos generales Identificar
Electrónica I. Guía 1 1 Facultad: Ingeniería. Escuela: Electrónica. Asignatura: Electrónica I. Lugar de ejecución: Fundamentos Generales (Edificio 3, 2da planta). DIODO DE UNION Objetivos generales Identificar
MEDICIONES EN AC CON EL OSCILOSCOPIO EL OSCILOSCOPIO DIGITAL
 UNIVERSIDAD SIMON BOLIVAR DEPARTAMENTO DE ELECTRONICA Y CIRCUITOS LABORATORIO DE MEDICIONES ELECTRICAS EC 1281 PRACTICA Nº 8 MEDICIONES EN AC CON EL OSCILOSCOPIO EL OSCILOSCOPIO DIGITAL Familiarizarse
UNIVERSIDAD SIMON BOLIVAR DEPARTAMENTO DE ELECTRONICA Y CIRCUITOS LABORATORIO DE MEDICIONES ELECTRICAS EC 1281 PRACTICA Nº 8 MEDICIONES EN AC CON EL OSCILOSCOPIO EL OSCILOSCOPIO DIGITAL Familiarizarse
ENTORNO DE SIMULACIÓN Y CONTROL DE UN ROBOT VELOCISTA
 ENTORNO DE SIMULACIÓN Y CONTROL DE UN ROBOT VELOCISTA PROYECTO FIN DE CARRERA Departamento de Electrónica. Universidad de Alcalá. Ingeniería Técnica de Telecomunicación. Especialidad en Sistemas Electrónicos
ENTORNO DE SIMULACIÓN Y CONTROL DE UN ROBOT VELOCISTA PROYECTO FIN DE CARRERA Departamento de Electrónica. Universidad de Alcalá. Ingeniería Técnica de Telecomunicación. Especialidad en Sistemas Electrónicos
Objetivos generales. Objetivos específicos. Materiales y equipo. Introducción teórica CARACTERISTICAS DEL BJT. Electrónica I.
 Electrónica I. Guía 6 1 / 9 Facultad: Ingeniería. Escuela: Electrónica. Asignatura: Electrónica I. Lugar de ejecución: Fundamentos Generales, aula 3.21 (Edificio 3, 2da planta). CARACTERISTICAS DEL BJT
Electrónica I. Guía 6 1 / 9 Facultad: Ingeniería. Escuela: Electrónica. Asignatura: Electrónica I. Lugar de ejecución: Fundamentos Generales, aula 3.21 (Edificio 3, 2da planta). CARACTERISTICAS DEL BJT
OBJETIVOS CONSULTA PREVIA. La información necesaria para el desarrollo de la práctica, se encuentra disponible al menos en las siguientes referencias.
 OBJETIVOS 1. Evaluar e interpretar las características fundamentales del amplificador diferencial. 2. Analizar las ventajas y desventajas de las diferentes formas de polarización del amplificador diferencial.
OBJETIVOS 1. Evaluar e interpretar las características fundamentales del amplificador diferencial. 2. Analizar las ventajas y desventajas de las diferentes formas de polarización del amplificador diferencial.
Práctica 2. Introducción a la simulación de sistemas mediante Simulink. Sistemas de primer, segundo y tercer orden. Objetivo
 Práctica 2 Introducción a la simulación de sistemas mediante Simulink. Sistemas de primer, segundo y tercer orden. Objetivo En esta práctica se pretende que el alumno tome contacto con una herramienta
Práctica 2 Introducción a la simulación de sistemas mediante Simulink. Sistemas de primer, segundo y tercer orden. Objetivo En esta práctica se pretende que el alumno tome contacto con una herramienta
USO DE INSTRUMENTOS DE LABORATORIO
 1 Facultad: Ingeniería. Escuela: Electrónica. Asignatura: Electrónica I. Lugar de ejecución: Fundamentos Generales (Edificio 3, 2da planta). USO DE INSTRUMENTOS DE LABORATORIO Objetivo General Obtener
1 Facultad: Ingeniería. Escuela: Electrónica. Asignatura: Electrónica I. Lugar de ejecución: Fundamentos Generales (Edificio 3, 2da planta). USO DE INSTRUMENTOS DE LABORATORIO Objetivo General Obtener
Integrador, realimentación y control
 Prctica 1 Integrador, realimentación y control El programa Simulink es un programa incluido dentro de Matlab que sirve para realizar la integración numérica de ecuaciones diferenciales a efectos de simular
Prctica 1 Integrador, realimentación y control El programa Simulink es un programa incluido dentro de Matlab que sirve para realizar la integración numérica de ecuaciones diferenciales a efectos de simular
Adquisición de señales analógicas y tratamiento de la información
 Adquisición de señales analógicas y tratamiento de la información 3.1. Introducción. El objetivo de esta práctica es el de capturar, mediante la Data Acquisition Toolbox de Matlab, diferentes tipos de
Adquisición de señales analógicas y tratamiento de la información 3.1. Introducción. El objetivo de esta práctica es el de capturar, mediante la Data Acquisition Toolbox de Matlab, diferentes tipos de
INSTITUCIÓN UNIVERSITARIA ANTONIO JOSÉ CAMACHO FACULTAD DE INGENIERÍA. PRACTICA DE LABORATORIO No. 5 MANEJO DE DATOS SERIALES
 INSTITUCIÓN UNIVERSITARIA ANTONIO JOSÉ CAMACHO FACULTAD DE INGENIERÍA INSTRUMENTACIÓN INTELIGENTE 1. OBJETIVOS PRACTICA DE LABORATORIO No. 5 MANEJO DE DATOS SERIALES 1.1 Crear un patrón de señal sencilla
INSTITUCIÓN UNIVERSITARIA ANTONIO JOSÉ CAMACHO FACULTAD DE INGENIERÍA INSTRUMENTACIÓN INTELIGENTE 1. OBJETIVOS PRACTICA DE LABORATORIO No. 5 MANEJO DE DATOS SERIALES 1.1 Crear un patrón de señal sencilla
Práctica 4 Control de posición y velocidad de un motor de corriente continua
 Práctica 4 Control de posición y velocidad de un motor de corriente continua Maqueta de control de posición y velocidad Practicas de Regulación Automática Maqueta de control de posición y velocidad Caja
Práctica 4 Control de posición y velocidad de un motor de corriente continua Maqueta de control de posición y velocidad Practicas de Regulación Automática Maqueta de control de posición y velocidad Caja
Controlador PID con anti-windup
 Laboratorio de Control de Procesos Industriales Práctica 1 Controlador PID con anti-windup 1 de noviembre de 2008 Introducción 2 INTRODUCCIÓN REGULADORES PID La idea básica del controlador PID es simple
Laboratorio de Control de Procesos Industriales Práctica 1 Controlador PID con anti-windup 1 de noviembre de 2008 Introducción 2 INTRODUCCIÓN REGULADORES PID La idea básica del controlador PID es simple
Tema: Uso del analizador espectral.
 Sistemas de Comunicación I. Guía 1 1 I Facultad: Ingeniería Escuela: Electrónica Asignatura: Sistemas de comunicación Tema: Uso del analizador espectral. Objetivos Conocer el funcionamiento de un Analizador
Sistemas de Comunicación I. Guía 1 1 I Facultad: Ingeniería Escuela: Electrónica Asignatura: Sistemas de comunicación Tema: Uso del analizador espectral. Objetivos Conocer el funcionamiento de un Analizador
Práctica N 2 Simulink como herramienta para resolver ecuaciones diferenciales
 Universidad Simón Bolívar Ingeniería Electrónica SEÑALES Y SISTEMAS I Práctica N Simulink como herramienta para resolver ecuaciones diferenciales Preparación Revisar el help que sobre Simulink tiene Matlab
Universidad Simón Bolívar Ingeniería Electrónica SEÑALES Y SISTEMAS I Práctica N Simulink como herramienta para resolver ecuaciones diferenciales Preparación Revisar el help que sobre Simulink tiene Matlab
ESPECTROS ATÓMICOS. a) Obtener las curvas características para los espectros de emisión del sodio, helio, hidrógeno y mercurio.
 Obtener las curvas características para los espectros de emisión del sodio, helio, hidrógeno y mercurio.") ESPECTROS ATÓMICOS OBJETIVOS a) Obtener las curvas características para los espectros de emisión del sodio, helio, hidrógeno y mercurio. b) Mediante las curvas características obtenidas, determinar las
ESPECTROS ATÓMICOS OBJETIVOS a) Obtener las curvas características para los espectros de emisión del sodio, helio, hidrógeno y mercurio. b) Mediante las curvas características obtenidas, determinar las
Introducción a circuitos de corriente alterna(2).
.") Universidad de Chile Facultad de Ciencias Físicas y Matemáticas Departamento de Física FI2003 - Métodos Experimentales Semestre otoño 2009 Profesores: Denise Criado, Claudio Falcón, Nicolás Mujica GUIA
Universidad de Chile Facultad de Ciencias Físicas y Matemáticas Departamento de Física FI2003 - Métodos Experimentales Semestre otoño 2009 Profesores: Denise Criado, Claudio Falcón, Nicolás Mujica GUIA
PROGRAMA INSTRUCCIONAL
 UNIVERSIDAD FERMIN TORO VICE RECTORADO ACADEMICO UNIVERSIDAD FACULTAD DE INGENIERIA ESCUELA DE MANTENIMIENTO MECÁNICO ESCUELA DE TELECOMUNICACIONES ESCUELA DE ELÉCTRICA ESCUELA DE COMPUTACIÓN PROGRAMA
UNIVERSIDAD FERMIN TORO VICE RECTORADO ACADEMICO UNIVERSIDAD FACULTAD DE INGENIERIA ESCUELA DE MANTENIMIENTO MECÁNICO ESCUELA DE TELECOMUNICACIONES ESCUELA DE ELÉCTRICA ESCUELA DE COMPUTACIÓN PROGRAMA
APLICACIONES LINEALES DEL AMPLIFICADOR OPERACIONAL
 UNIVERSIDAD DEL VALLE ESCUELA DE INGENIERIA ELÉCTRICA Y ELÉCTRONICA CÁTEDRA DE PERCEPCIÓN Y SISTEMAS INTELIGENTES LABORATORIO N Fundamentos de Electrónica APLICACIONES LINEALES DEL AMPLIFICADOR OPERACIONAL
UNIVERSIDAD DEL VALLE ESCUELA DE INGENIERIA ELÉCTRICA Y ELÉCTRONICA CÁTEDRA DE PERCEPCIÓN Y SISTEMAS INTELIGENTES LABORATORIO N Fundamentos de Electrónica APLICACIONES LINEALES DEL AMPLIFICADOR OPERACIONAL
Sistema de Control Página 1 de 6. Código:
 Sistema de Control Página 1 de 6 Programa de: Sistemas de Control UNIVERSIDAD NACIONAL DE CÓRDOBA Facultad de Ciencias Exactas, Físicas y Naturales República Argentina Carrera: Ingeniería Mecánica Escuela:
Sistema de Control Página 1 de 6 Programa de: Sistemas de Control UNIVERSIDAD NACIONAL DE CÓRDOBA Facultad de Ciencias Exactas, Físicas y Naturales República Argentina Carrera: Ingeniería Mecánica Escuela:
11. REACTOR DE CONVERSION
 11. REACTOR DE CONVERSION 1. OBJETIVOS 1. Simular, en estado estacionario un reactor de conversión 2. Relacionar dos variables mediante la opción Set de HYSYS 3. Verificar los resultados obtenidos por
11. REACTOR DE CONVERSION 1. OBJETIVOS 1. Simular, en estado estacionario un reactor de conversión 2. Relacionar dos variables mediante la opción Set de HYSYS 3. Verificar los resultados obtenidos por
3. Operar un generador de señales de voltaje en función senoidal, cuadrada, triangular.
 Objetivos: UNIVERSIDAD FRANCISCO DE PAULA SANTANDER Al terminar la práctica el alumno estará capacitado para: 1. El manejo de los controles del osciloscopio (encendido, ajuste de intensidad, barrido vertical,
Objetivos: UNIVERSIDAD FRANCISCO DE PAULA SANTANDER Al terminar la práctica el alumno estará capacitado para: 1. El manejo de los controles del osciloscopio (encendido, ajuste de intensidad, barrido vertical,
SISTEMAS DE COMUNICACIÓN A & D -- Práctica de laboratorio FRECUENCIA MODULADA EN EL DOMINIO DEL TIEMPO Y FRECUENCIA
 1 SISTEMAS DE COMUNICACIÓN A & D -- Práctica de laboratorio FRECUENCIA MODULADA EN EL DOMINIO DEL TIEMPO Y FRECUENCIA I. OBJETIVOS 1. Implementar un modulador de frecuencia utilizando el XR-2206. 2. Complementar
1 SISTEMAS DE COMUNICACIÓN A & D -- Práctica de laboratorio FRECUENCIA MODULADA EN EL DOMINIO DEL TIEMPO Y FRECUENCIA I. OBJETIVOS 1. Implementar un modulador de frecuencia utilizando el XR-2206. 2. Complementar
Modelos Dinámicos (UDM) Arranque de Generadores Estabilidad Transitoria Estimación de Parámetros Transitorios Electromagnéticos
 Arranque de Generadores Estabilidad Transitoria Estimación de Parámetros Transitorios Electromagnéticos") Modelos Dinámicos (UDM) Arranque de Generadores Estabilidad Transitoria Estimación de Parámetros Transitorios Electromagnéticos Flexible, Innovador, Sofisticado Solución Dinámica para Análisis Transitorio
Modelos Dinámicos (UDM) Arranque de Generadores Estabilidad Transitoria Estimación de Parámetros Transitorios Electromagnéticos Flexible, Innovador, Sofisticado Solución Dinámica para Análisis Transitorio
Tema: Fuente de Alimentación de Rayos X
 Facultad Escuela Lugar de Ejecución : Ingeniería. : Biomédica : Laboratorio de Biomédica Tema: Fuente de Alimentación de Rayos X Objetivos Analizar la fuente de alimentación de un sistema de rayos X Conocer
Facultad Escuela Lugar de Ejecución : Ingeniería. : Biomédica : Laboratorio de Biomédica Tema: Fuente de Alimentación de Rayos X Objetivos Analizar la fuente de alimentación de un sistema de rayos X Conocer
Contenidos Control y Automatización
 Tema 2: Modelos Matemáticos Susana Borromeo Juan Antonio Hernández Tamames Curso 2014-2015 Contenidos 1. Conceptos básicos. 2. Modelado matemático de sistemas Físicos. Linealización. Función de Transferencia
Tema 2: Modelos Matemáticos Susana Borromeo Juan Antonio Hernández Tamames Curso 2014-2015 Contenidos 1. Conceptos básicos. 2. Modelado matemático de sistemas Físicos. Linealización. Función de Transferencia
Tema: S7-200, Escalado de Valores analógicos
 Autómatas Programables. Guía 8 1 Tema: S7-200, Escalado de Valores analógicos Objetivo General Configurar las entradas analógicas del módulo EM235 en el S7-200 Objetivos Específicos Conectar correctamente
Autómatas Programables. Guía 8 1 Tema: S7-200, Escalado de Valores analógicos Objetivo General Configurar las entradas analógicas del módulo EM235 en el S7-200 Objetivos Específicos Conectar correctamente
CARACTERISTICAS DEL JFET.
 Electrónica I. Guía 4 1 / 1 CARACTERISTICAS DEL JFET. Facultad: Ingeniería. Escuela: Electrónica. Asignatura: Electrónica I. Lugar de ejecución: Fundamentos Generales (Edificio 3, 2da planta, Aula 3.21).
Electrónica I. Guía 4 1 / 1 CARACTERISTICAS DEL JFET. Facultad: Ingeniería. Escuela: Electrónica. Asignatura: Electrónica I. Lugar de ejecución: Fundamentos Generales (Edificio 3, 2da planta, Aula 3.21).
CAPITULO 4.- QUANSER Planta Rotatoria
 La Planta Rotatoria QUANSER MR es un dispositivo, que permite mediante programación y una tarjeta de adquisición de datos, desarrollar algoritmos para controlar el movimiento de diversos elementos independientes
La Planta Rotatoria QUANSER MR es un dispositivo, que permite mediante programación y una tarjeta de adquisición de datos, desarrollar algoritmos para controlar el movimiento de diversos elementos independientes
PRIMER LABORATORIO EL 7032
 PRIMER LABORATORIO EL 7032 1.- OBJETIVOS.- 1.1.- Analizar las formas de onda y el comportamiento dinámico de un motor de corriente continua alimentado por un conversor Eurotherm Drives, 590+ Series DC
PRIMER LABORATORIO EL 7032 1.- OBJETIVOS.- 1.1.- Analizar las formas de onda y el comportamiento dinámico de un motor de corriente continua alimentado por un conversor Eurotherm Drives, 590+ Series DC
UNIVERSIDAD NACIONAL DEL SANTA ESCUELA DE INGENIERIA EN ENERGIA MODULO 5
 UNIVERSIDAD NACIONAL DEL SANTA ESCUELA DE INGENIERIA EN ENERGIA MODULO 5 CURSO: CONTROL AUTOMATICO PROFESOR: MSC. CESAR LOPEZ AGUILAR INGENIERO EN ENERGIA-INGENIERO MECANICO ELECTRICISTA I. CONTENIDO 1.
UNIVERSIDAD NACIONAL DEL SANTA ESCUELA DE INGENIERIA EN ENERGIA MODULO 5 CURSO: CONTROL AUTOMATICO PROFESOR: MSC. CESAR LOPEZ AGUILAR INGENIERO EN ENERGIA-INGENIERO MECANICO ELECTRICISTA I. CONTENIDO 1.
Facultad de Ingeniería. Escuela de Eléctrica. Asignatura CONVERSIÓNDE LA
 Tema: PRINCIPIOS DE LAS MAQUINAS DE CORRIENTE CONTINUA. I. OBJETIVOS. Facultad de Ingeniería. Escuela de Eléctrica. Asignatura CONVERSIÓNDE LA ENERGIAELECTROMECÁNICAII. Que el estudiante: Identifique la
Tema: PRINCIPIOS DE LAS MAQUINAS DE CORRIENTE CONTINUA. I. OBJETIVOS. Facultad de Ingeniería. Escuela de Eléctrica. Asignatura CONVERSIÓNDE LA ENERGIAELECTROMECÁNICAII. Que el estudiante: Identifique la
PRÁCTICA PD4 REGULACIÓN DE VOLTAJE CON DIODOS ZENER
 elab, Laboratorio Remoto de Electrónica ITEM, Depto. de Ingeniería Eléctrica PRÁCTICA PD4 REGULACIÓN DE OLTAJE CON DIODO ENER OBJETIO Analizar teóricamente y de forma experimental la aplicación de diodos
elab, Laboratorio Remoto de Electrónica ITEM, Depto. de Ingeniería Eléctrica PRÁCTICA PD4 REGULACIÓN DE OLTAJE CON DIODO ENER OBJETIO Analizar teóricamente y de forma experimental la aplicación de diodos
Movimiento rectilíneo uniformemente acelerado
 Movimiento rectilíneo uniormemente acelerado Objetivo General El alumno estudiará el movimiento rectilíneo uniormemente acelerado Objetivos particulares 1. Determinar experimentalmente la relación entre
Movimiento rectilíneo uniormemente acelerado Objetivo General El alumno estudiará el movimiento rectilíneo uniormemente acelerado Objetivos particulares 1. Determinar experimentalmente la relación entre
SIMULACIÓN DE LA MODULACIÓN POR AMPLITUD DE PULSOS (PAM) EN MATLAB
 EN MATLAB") SIMULACIÓN DE LA MODULACIÓN POR AMPLITUD DE PULSOS (PAM) EN MATLAB 1. OBJETIVOS: General: o Implementar en simulink un sistema de bloques que permita simular Modulación por Amplitud de Pulsos (PAM), a
SIMULACIÓN DE LA MODULACIÓN POR AMPLITUD DE PULSOS (PAM) EN MATLAB 1. OBJETIVOS: General: o Implementar en simulink un sistema de bloques que permita simular Modulación por Amplitud de Pulsos (PAM), a
Mapeo del Campo Magnético de un Solenoide Finito
 Universidad Nacional Autónoma de Honduras Facultad de Ciencias Escuela de Física Mapeo del Campo Magnético de un Solenoide Finito Elaborado por: Roberto Ortiz Introducción Se tiene un Solenoide de N 1
Universidad Nacional Autónoma de Honduras Facultad de Ciencias Escuela de Física Mapeo del Campo Magnético de un Solenoide Finito Elaborado por: Roberto Ortiz Introducción Se tiene un Solenoide de N 1
Herramientas Integradas para Laboratorios de Electrónica
 Herramientas Integradas para Laboratorios de Electrónica NI Educational Laboratory Virtual Instrumentation Suite (NI ELVIS) Integración y funcionalidad con múltiples instrumentos. Combina instrumentación,
Herramientas Integradas para Laboratorios de Electrónica NI Educational Laboratory Virtual Instrumentation Suite (NI ELVIS) Integración y funcionalidad con múltiples instrumentos. Combina instrumentación,
Simulación de sistemas con Simulink
 Curso: 2006/2007 Asignatura: Automatización de Procesos Industriales. Grupo: IOI Simulación de sistemas con Simulink 1.1 INTRODUCCIÓN A SIMULINK...2 1.1.1 CREACIÓN DE UN MODELO...3 1.2 SIMULACIÓN DE UN
Curso: 2006/2007 Asignatura: Automatización de Procesos Industriales. Grupo: IOI Simulación de sistemas con Simulink 1.1 INTRODUCCIÓN A SIMULINK...2 1.1.1 CREACIÓN DE UN MODELO...3 1.2 SIMULACIÓN DE UN
EJERCICIOS DE CONTROL POR COMPUTADOR BOLETIN V: SISTEMAS DISCRETOS (I)
") C. Determine el valor al que tenderá en régimen permanente la salida ante un escalón de amplitud 3 a la entrada del sistema discreto dado por: z.7 G( z) ( z.5) z C. a) Determinar la región del plano z
C. Determine el valor al que tenderá en régimen permanente la salida ante un escalón de amplitud 3 a la entrada del sistema discreto dado por: z.7 G( z) ( z.5) z C. a) Determinar la región del plano z
ANEXO I DESCRIPCIÓN DE BLOQUES RTI DE LA TARJETA DE PROCESAMIENTO DE SEÑAL DSPACE 1102
 ANEXO I DESCRIPCIÓN DE BLOQUES RTI DE LA TARJETA DE PROCESAMIENTO DE SEÑAL DSPACE 1102 Una vez obtenido el modelo (función de transferencia) de la planta, y después de haber diseñado los controladores
ANEXO I DESCRIPCIÓN DE BLOQUES RTI DE LA TARJETA DE PROCESAMIENTO DE SEÑAL DSPACE 1102 Una vez obtenido el modelo (función de transferencia) de la planta, y después de haber diseñado los controladores
PRÁCTICA 2: REPETIDORAS ANALÓGICAS PASABANDA. CARACTERIZACIÓN DEL RUIDO PASABANDA
 EC2422. Comunicaciones I Enero Marzo 2006 PRÁCTICA 2: REPETIDORAS ANALÓGICAS PASABANDA. CARACTERIZACIÓN DEL RUIDO PASABANDA 1. Objetivos 1.1) Simular la transmisión de señales moduladas AM y SSB a través
EC2422. Comunicaciones I Enero Marzo 2006 PRÁCTICA 2: REPETIDORAS ANALÓGICAS PASABANDA. CARACTERIZACIÓN DEL RUIDO PASABANDA 1. Objetivos 1.1) Simular la transmisión de señales moduladas AM y SSB a través
El sistema a identificar es el conjunto motor eléctrico-freno siguiente:
 Sistema a identificar El sistema a identificar es el conjunto motor eléctrico-freno siguiente: Relación entrada-salida Las variables de entrada-salida a considerar para la identificación del sistema es
Sistema a identificar El sistema a identificar es el conjunto motor eléctrico-freno siguiente: Relación entrada-salida Las variables de entrada-salida a considerar para la identificación del sistema es
PRÁCTICA 4: RESPUESTA EN FRECUENCIA Y COMPENSACION P P T T T. 1.-Objetivos.
 PRÁCTICA 4: RESPUESTA E FRECUECIA Y COMPESACIO 1.-Objetivos. P P P P Medir y conocer la respuesta en frecuencia de los amplificadores. Medir correctamente la ganancia de tensión de un amplificador, en
PRÁCTICA 4: RESPUESTA E FRECUECIA Y COMPESACIO 1.-Objetivos. P P P P Medir y conocer la respuesta en frecuencia de los amplificadores. Medir correctamente la ganancia de tensión de un amplificador, en
Programa de Asignatura
 Departamento de Ingeniería Industrial Programa: Ingeniería Mecatrónica, Plan 007- Asignatura: Electrónica Industrial Clave: 995 Semestre: VII Tipo: Obligatoria H. Teoría: H Práctica: H. Lab: 0 HSM: Créditos:
Departamento de Ingeniería Industrial Programa: Ingeniería Mecatrónica, Plan 007- Asignatura: Electrónica Industrial Clave: 995 Semestre: VII Tipo: Obligatoria H. Teoría: H Práctica: H. Lab: 0 HSM: Créditos:
EXP207 REGLAS DE FUNCIONAMIENTO EN OP-AMPS.
 EXP207 REGLAS DE FUNCIONAMIENTO EN OP-AMPS. I.- OBJETIVOS. Comprobar experimentalmente las reglas de funcionamiento líneas del amplificador lineal del amplificador operacional. Comprobar el funcionamiento
EXP207 REGLAS DE FUNCIONAMIENTO EN OP-AMPS. I.- OBJETIVOS. Comprobar experimentalmente las reglas de funcionamiento líneas del amplificador lineal del amplificador operacional. Comprobar el funcionamiento
Lab 5: Contador decimal en System Generator
 Lab 5: Contador decimal en System Generator Introducción Objetivos Este laboratorio guia al asistente a través de las herramientas System Generator y Simulink para analizar la representación de números
Lab 5: Contador decimal en System Generator Introducción Objetivos Este laboratorio guia al asistente a través de las herramientas System Generator y Simulink para analizar la representación de números
Práctica Nº 5 AMPLIFICADORES OPERACIONALES.
 Práctica Nº 5 AMPLIFICADORES OPERACIONALES. 1. INTRODUCCION. El concepto original del amplificador operacional procede del campo de los computadores analógicos, en los que comenzaron a usarse técnicas
Práctica Nº 5 AMPLIFICADORES OPERACIONALES. 1. INTRODUCCION. El concepto original del amplificador operacional procede del campo de los computadores analógicos, en los que comenzaron a usarse técnicas
SIMULACIÓN CON PROTEUS
 UNIVERSIDAD DEL VALLE ESCUELA DE INGENIERIA ELÉCTRICA Y ELÉCTRONICA CÁTEDRA DE PERCEPCIÓN Y SISTEMAS INTELIGENTES LABORATORIO 2: PROTEUS 1. OBJETIVOS SIMULACIÓN CON PROTEUS Introducir al estudiante en
UNIVERSIDAD DEL VALLE ESCUELA DE INGENIERIA ELÉCTRICA Y ELÉCTRONICA CÁTEDRA DE PERCEPCIÓN Y SISTEMAS INTELIGENTES LABORATORIO 2: PROTEUS 1. OBJETIVOS SIMULACIÓN CON PROTEUS Introducir al estudiante en
LABORATORIO DE CONTROL INDUSTRIAL PRÁCTICA N 4
 ESCUELA POLITÉCNICA NACIONAL Campus Politécnico "J. Rubén Orellana R." FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control Carrera de Ingeniería Eléctrica 1. TEMA
ESCUELA POLITÉCNICA NACIONAL Campus Politécnico "J. Rubén Orellana R." FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control Carrera de Ingeniería Eléctrica 1. TEMA
GUÍAS DE LOS LABORATORIO DE FÍSICA I Y LABORATORIO DE FÍSICA GENERAL
 UNIVERSIDAD NACIONAL EXPERIMENTAL FRANCISCO DE MIRANDA COMPLEJO ACADÉMICO EL SABINO AREA DE TECNOLOGIA DEPARTAMENTO DE FÍSICA Y MATEMATICA COORDINACION DE LABORATORIOS DE FÍSICA GUÍAS DE LOS LABORATORIO
UNIVERSIDAD NACIONAL EXPERIMENTAL FRANCISCO DE MIRANDA COMPLEJO ACADÉMICO EL SABINO AREA DE TECNOLOGIA DEPARTAMENTO DE FÍSICA Y MATEMATICA COORDINACION DE LABORATORIOS DE FÍSICA GUÍAS DE LOS LABORATORIO
MÁSTER OFICIAL EN SISTEMAS ELECTRÓNICOS AVANZADOS, SISTEMAS INTELIGENTES. Asignatura: Convertidores Avanzados de Potencia.
 MÁSTER OFICIAL EN SISTEMAS ELECTRÓNICOS AVANZADOS, SISTEMAS INTELIGENTES Asignatura: Convertidores Avanzados de Potencia Práctica 0 Introducción al Matlab/SIMULINK y análisis de potencia 1.- OBJETIVOS.
MÁSTER OFICIAL EN SISTEMAS ELECTRÓNICOS AVANZADOS, SISTEMAS INTELIGENTES Asignatura: Convertidores Avanzados de Potencia Práctica 0 Introducción al Matlab/SIMULINK y análisis de potencia 1.- OBJETIVOS.
Smart Access Procedimiento operativo
 Smart Access Procedimiento operativo A. Condiciones previas... 2 1. Compatibilidad con smartphones... 2 2. Selección del cable... 2 a. Dispositivos Apple (iphone 4 y 4S)... 2 b. Dispositivos Apple (iphone
Smart Access Procedimiento operativo A. Condiciones previas... 2 1. Compatibilidad con smartphones... 2 2. Selección del cable... 2 a. Dispositivos Apple (iphone 4 y 4S)... 2 b. Dispositivos Apple (iphone
ASIGNATURA: SISTEMAS DE CONTROL CÓDIGO: Teórico #4 Cursada 2015
 ASIGNATURA: SISTEMAS DE CONTROL CÓDIGO: 0336 Teórico #4 Cursada 2015 RESUMEN CLASE ANTERIOR (Teórico #3) Capítulo 1 - Introducción 1-1. Descripción y aplicaciones de sistemas de control automático. 1-2.
ASIGNATURA: SISTEMAS DE CONTROL CÓDIGO: 0336 Teórico #4 Cursada 2015 RESUMEN CLASE ANTERIOR (Teórico #3) Capítulo 1 - Introducción 1-1. Descripción y aplicaciones de sistemas de control automático. 1-2.
CÁMARA IP INALÁMBRICA HD 720p VISIÓN NOCTURNA, AUDIO Y FUNCIÓN DE GRABACIÓN
 CÁMARA IP INALÁMBRICA HD 720p VISIÓN NOCTURNA, AUDIO Y FUNCIÓN DE GRABACIÓN VTA-83700 Gracias por adquirir nuestra CÁMARA! Antes de instalar y operar el producto, se recomienda tener en cuenta las instrucciones
CÁMARA IP INALÁMBRICA HD 720p VISIÓN NOCTURNA, AUDIO Y FUNCIÓN DE GRABACIÓN VTA-83700 Gracias por adquirir nuestra CÁMARA! Antes de instalar y operar el producto, se recomienda tener en cuenta las instrucciones
Experimento 5: Transistores BJT como interruptores: Multivibradores
 Instituto Tecnológico de Costa Rica Escuela de Ingeniería Electrónica Profesores: Ing. Sergio Morales, Ing. Pablo Alvarado, Ing. Eduardo Interiano Laboratorio de Elementos Activos II Semestre 2006 I Experimento
Instituto Tecnológico de Costa Rica Escuela de Ingeniería Electrónica Profesores: Ing. Sergio Morales, Ing. Pablo Alvarado, Ing. Eduardo Interiano Laboratorio de Elementos Activos II Semestre 2006 I Experimento
Pluma Medidora de Vibración
 Manual del usuario Pluma Medidora de Vibración Modelo VB400 Introducción Agradecemos su compra del medidor Extech VB400 que está diseñado para suministrar mediciones fáciles y precisas de velocidad y aceleración
Manual del usuario Pluma Medidora de Vibración Modelo VB400 Introducción Agradecemos su compra del medidor Extech VB400 que está diseñado para suministrar mediciones fáciles y precisas de velocidad y aceleración
Experimento 6: Transistores MOSFET como conmutadores y compuertas CMOS
 Instituto Tecnológico de Costa Rica Escuela de Ingeniería Electrónica Profesores: Ing. Sergio Morales, Ing. Pablo Alvarado, Ing. Eduardo Interiano Laboratorio de Elementos Activos II Semestre 2006 I Experimento
Instituto Tecnológico de Costa Rica Escuela de Ingeniería Electrónica Profesores: Ing. Sergio Morales, Ing. Pablo Alvarado, Ing. Eduardo Interiano Laboratorio de Elementos Activos II Semestre 2006 I Experimento
Laboratorio de Física Universitaria 1 Movimiento Circular Uniforme en Video Point. Primavera 2006 Arturo Bailón
 MOVIMIENTO CIRCULAR UNIFORME OBJETIVO GENERAL DE LA FÍSICA: -El alumno obtendrá una clara visión de las ideas sobre la naturaleza a través de las prácticas experimentales. Una visión que lo acostumbrará
MOVIMIENTO CIRCULAR UNIFORME OBJETIVO GENERAL DE LA FÍSICA: -El alumno obtendrá una clara visión de las ideas sobre la naturaleza a través de las prácticas experimentales. Una visión que lo acostumbrará
Guía para la realización de prácticas de Control
 Guía para la realización de prácticas de Control Ésta guía tiene la finalidad de asistir al alumno de Control en la resolución de prácticas de la materia. Las bases teóricas usadas en la misma están cubiertas
Guía para la realización de prácticas de Control Ésta guía tiene la finalidad de asistir al alumno de Control en la resolución de prácticas de la materia. Las bases teóricas usadas en la misma están cubiertas
Figura 1. (a) Diagrama de conexiones del LM741. (b) Diagrama de conexiones del TL084
 Diagrama de conexiones del LM741. (b) Diagrama de conexiones del TL084") Práctica No. Usos del Amplificador Operacional (OPAM) Objetivos. Comprobar las configuraciones típicas del amplificador operacional. Comprender en forma experimental el funcionamiento del amplificador
Práctica No. Usos del Amplificador Operacional (OPAM) Objetivos. Comprobar las configuraciones típicas del amplificador operacional. Comprender en forma experimental el funcionamiento del amplificador
Electrónica 1. Práctico 2 Amplificadores operacionales 2
 Electrónica 1 Práctico 2 Amplificadores operacionales 2 Los ejercicios marcados con son opcionales. Además cada ejercicio puede tener un número, que indica el número de ejercicio del libro del curso (Microelectronic
Electrónica 1 Práctico 2 Amplificadores operacionales 2 Los ejercicios marcados con son opcionales. Además cada ejercicio puede tener un número, que indica el número de ejercicio del libro del curso (Microelectronic
PROGRAMA DE CURSO. Conversión de la Energía y Sistemas Eléctricos Nombre en Inglés Energy Conversion and Power Systems SCT
 Código Nombre PROGRAMA DE CURSO EL 4001 Conversión de la Energía y Sistemas Eléctricos Nombre en Inglés Energy Conversion and Power Systems SCT Unidades Horas de Horas Docencia Horas de Trabajo Docentes
Código Nombre PROGRAMA DE CURSO EL 4001 Conversión de la Energía y Sistemas Eléctricos Nombre en Inglés Energy Conversion and Power Systems SCT Unidades Horas de Horas Docencia Horas de Trabajo Docentes
MOTORES DE CORRIENTE CONTÍNUA
 MOTORES DE CORRIENTE CONTÍNUA PRÁCTICA 1 ESTUDIO Y CÁLCULO DE LOS PARÁMETROS DE UN MOTOR DE CC El motor que se va a utilizar en las prácticas que se proponen a continuación es el 2842-012C, de minimotors
MOTORES DE CORRIENTE CONTÍNUA PRÁCTICA 1 ESTUDIO Y CÁLCULO DE LOS PARÁMETROS DE UN MOTOR DE CC El motor que se va a utilizar en las prácticas que se proponen a continuación es el 2842-012C, de minimotors
GUIAS ÚNICAS DE LABORATORIO DE FÍSICA I TRABAJO Y ENERGIA COEFICIENTE DE FRICCIÒN
 GUIAS ÚNICAS DE LABORATORIO DE FÍSICA I TRABAJO Y ENERGIA COEFICIENTE DE FRICCIÒN SANTIAGO DE CALI UNIVERSIDAD SANTIAGO DE CALI DEPARTAMENTO DE LABORATORIOS COEFICIENTE DE FRICCIÓN 1. OBJETIVO Estudio
GUIAS ÚNICAS DE LABORATORIO DE FÍSICA I TRABAJO Y ENERGIA COEFICIENTE DE FRICCIÒN SANTIAGO DE CALI UNIVERSIDAD SANTIAGO DE CALI DEPARTAMENTO DE LABORATORIOS COEFICIENTE DE FRICCIÓN 1. OBJETIVO Estudio
Instrumentación biomédica Prácticas de laboratorio
 Instrumentación biomédica Prácticas de laboratorio Práctica 0. Primera parte: Introducción al laboratorio Semana BB Mireya Fernandez Chimeno Miguel Ángel García González UPC-Departament d Enginyeria Electrònica
Instrumentación biomédica Prácticas de laboratorio Práctica 0. Primera parte: Introducción al laboratorio Semana BB Mireya Fernandez Chimeno Miguel Ángel García González UPC-Departament d Enginyeria Electrònica
Práctica 1 Introducción y fundamentos
 Práctica 1 Introducción y fundamentos Apartado 1 Sumideros, fuentes y el espacio de trabajo: Entradas y salidas de Simulink. En esta práctica se hará un repaso de las diferentes formas de definir los parámetros
Práctica 1 Introducción y fundamentos Apartado 1 Sumideros, fuentes y el espacio de trabajo: Entradas y salidas de Simulink. En esta práctica se hará un repaso de las diferentes formas de definir los parámetros
ACELERACION DE LA GRAVEDAD. CAIDA LIBRE. (SENSOR DE FOTOPUERTA Y LÁMINA OBTURADORA).
.") ACELERACION DE LA GRAVEDAD. CAIDA LIBRE. (SENSOR DE FOTOPUERTA Y LÁMINA OBTURADORA). Traducción del Physics Labs with Computers. PASCO. Actividad Práctica 5. Teacher s Guide Volumen 1. Pág. 53. Student
ACELERACION DE LA GRAVEDAD. CAIDA LIBRE. (SENSOR DE FOTOPUERTA Y LÁMINA OBTURADORA). Traducción del Physics Labs with Computers. PASCO. Actividad Práctica 5. Teacher s Guide Volumen 1. Pág. 53. Student
TÉCNICO SUPERIOR UNIVERSITARIO EN ENERGÍAS RENOVABLES ÁREA ENERGÍA SOLAR EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ADQUISICIÓN DE DATOS
 TÉCNICO SUPERIOR UNIVERSITARIO EN ENERGÍAS RENOVABLES ÁREA ENERGÍA SOLAR EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ADQUISICIÓN DE DATOS 1. Competencias Desarrollar sistemas fototérmicos y fotovoltaicos
TÉCNICO SUPERIOR UNIVERSITARIO EN ENERGÍAS RENOVABLES ÁREA ENERGÍA SOLAR EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ADQUISICIÓN DE DATOS 1. Competencias Desarrollar sistemas fototérmicos y fotovoltaicos
Laboratorio N 3: TERMOMETRÍA
 1 Facultad Escuela Lugar de Ejecución : Ingeniería. : Biomédica : Laboratorio de Biomédica Laboratorio N 3: TERMOMETRÍA Objetivos Conocer el principio de funcionamiento del termómetro analógico. Emplear
1 Facultad Escuela Lugar de Ejecución : Ingeniería. : Biomédica : Laboratorio de Biomédica Laboratorio N 3: TERMOMETRÍA Objetivos Conocer el principio de funcionamiento del termómetro analógico. Emplear
Acciones básicas de control Clasificación de los controles automáticos
 Acciones básicas de control Clasificación de los controles automáticos 1. Control de dos posiciones o de si-no 2. Controles proporcionales (P) 3. Controles proporcionales e integrales (PI) 4. Controles
Acciones básicas de control Clasificación de los controles automáticos 1. Control de dos posiciones o de si-no 2. Controles proporcionales (P) 3. Controles proporcionales e integrales (PI) 4. Controles
Transformaciones lineales Valores y vectores característicos Ecuaciones diferenciales y transformada de Laplace Leyes físicas
 NOMBRE DE LA ASIGNATURA: Dinámica de Sistemas CREDITOS: 4-2-10 APORTACIÓN AL PERFIL Proporcionar conceptos, teorías y herramientas que le permitan integrar diversas disciplinas de la ingeniería tales como:
NOMBRE DE LA ASIGNATURA: Dinámica de Sistemas CREDITOS: 4-2-10 APORTACIÓN AL PERFIL Proporcionar conceptos, teorías y herramientas que le permitan integrar diversas disciplinas de la ingeniería tales como:
DIAGRAMAS DE BLOQUES. Figura 1 Elementos de un diagrama de bloques
 DIAGRAMAS DE BOQUES 1. EEMENTOS DE UN DIAGRAMA DE BOQUES Un diagrama de bloques de un sistema es una representación gráfica de las funciones realizadas por cada componente y del flujo de las señales. os
DIAGRAMAS DE BOQUES 1. EEMENTOS DE UN DIAGRAMA DE BOQUES Un diagrama de bloques de un sistema es una representación gráfica de las funciones realizadas por cada componente y del flujo de las señales. os
Experiencia P51: Circuito RL Sensor de Voltaje, salida de potencia
 Sensor de Voltaje, salida de potencia Tema DataStudio ScienceWorkshop (Mac) ScienceWorkshop (Win) Circuitos P51 LR Circuit.DS ( vea al final experiencia) ( vea al final experiencia) Equipo necesario Cant.
Sensor de Voltaje, salida de potencia Tema DataStudio ScienceWorkshop (Mac) ScienceWorkshop (Win) Circuitos P51 LR Circuit.DS ( vea al final experiencia) ( vea al final experiencia) Equipo necesario Cant.
Control en Tiempo Real de un Posicionador XY
 Control en Tiempo Real de un Posicionador XY Julio C. CURAY Departamento de Ingeniería, Pontificia Universidad Católica del Perú San Miguel, Lima, Lima 32, Perú y Julio C. TAFUR Departamento de Ingeniería,
Control en Tiempo Real de un Posicionador XY Julio C. CURAY Departamento de Ingeniería, Pontificia Universidad Católica del Perú San Miguel, Lima, Lima 32, Perú y Julio C. TAFUR Departamento de Ingeniería,
MOMENTO DE INERCIA 1. I OBJETIVO: Determinar el momento de inercia de un cuerpo usando un método dinámico
 1 MOMENTO DE INERCIA 1 I OBJETIVO: Determinar el momento de inercia de un cuerpo usando un método dinámico II TEORIA: Un cuerpo rígido es un sistema constituido por muchas partículas de masa m i tal que
1 MOMENTO DE INERCIA 1 I OBJETIVO: Determinar el momento de inercia de un cuerpo usando un método dinámico II TEORIA: Un cuerpo rígido es un sistema constituido por muchas partículas de masa m i tal que
TRANSIENTES EN CIRCUITOS RC y SU APLICACION A LA MEDIDA DE CAPACITANClAS
 PRÁCTICA DE LABORATORIO II-09 TRANSIENTES EN CIRCUITOS RC y SU APLICACION A LA MEDIDA DE CAPACITANClAS OBJETIVOS Estudiar los fenómenos transientes que se producen en circuitos RC de corriente directa.
PRÁCTICA DE LABORATORIO II-09 TRANSIENTES EN CIRCUITOS RC y SU APLICACION A LA MEDIDA DE CAPACITANClAS OBJETIVOS Estudiar los fenómenos transientes que se producen en circuitos RC de corriente directa.
Tema: TERMOMETRÍA. Remítase y Analice la Bibliografía indicada para el Primer Objetivo. Investigue Sobre el puente de Wheatstone
 1 Facultad Escuela Lugar de Ejecución : Ingeniería. : Biomédica : Laboratorio de Biomédica Tema: TERMOMETRÍA Objetivo Conocer el principio de funcionamiento del termómetro analógico. Emplear de manera
1 Facultad Escuela Lugar de Ejecución : Ingeniería. : Biomédica : Laboratorio de Biomédica Tema: TERMOMETRÍA Objetivo Conocer el principio de funcionamiento del termómetro analógico. Emplear de manera
I. Objetivos. II. Introducción.
 Universidad de Sonora División de Ciencias Exactas y Naturales Departamento de Física Laboratorio de Mecánica II Práctica #: Dinámica rotacional: Cálculo del Momento de Inercia I. Objetivos. Medir el momento
Universidad de Sonora División de Ciencias Exactas y Naturales Departamento de Física Laboratorio de Mecánica II Práctica #: Dinámica rotacional: Cálculo del Momento de Inercia I. Objetivos. Medir el momento
Experiencia P33: Intensidad de la Luz frente a distancia Sensor de Luz, Sensor de Movimiento rotatorio
 Experiencia P33: Intensidad de la Luz frente a distancia Sensor de Luz, Sensor de Movimiento rotatorio Tema DataStudio ScienceWorkshop (Mac) ScienceWorkshop (Win) Inverse Square Law? P33 Light vs Position.DS
Experiencia P33: Intensidad de la Luz frente a distancia Sensor de Luz, Sensor de Movimiento rotatorio Tema DataStudio ScienceWorkshop (Mac) ScienceWorkshop (Win) Inverse Square Law? P33 Light vs Position.DS
DISEÑO Y CONSTRUCCION DE UN SISTEMA DE RECTIFICACION CONTROLADO APLICADO A UN MOTOR DC
 DISEÑO Y CONSTRUCCION DE UN SISTEMA DE RECTIFICACION CONTROLADO APLICADO A UN MOTOR DC Gunther Andrade 1, Guillermo Eras 2, Jazmín Llerena 3, Fabricio Ordóñez 4, Norman Chootong 5 RESUMEN El objetivo de
DISEÑO Y CONSTRUCCION DE UN SISTEMA DE RECTIFICACION CONTROLADO APLICADO A UN MOTOR DC Gunther Andrade 1, Guillermo Eras 2, Jazmín Llerena 3, Fabricio Ordóñez 4, Norman Chootong 5 RESUMEN El objetivo de
PLANEACIÓN DIDÁCTICA FO205P
 PLANEACIÓN DIDÁCTICA FO205P11000-44 DIVISIÓN (1) INGENIERÍA ELECTRONICA DOCENTE (2) ING. EDUARDO GONZALO MANUEL TZUL NOMBRE DE LA ASIGNATURA (3) AMPLIFICADORES OPERACIONALES CRÉDITOS (4) 5 CLAVE DE LA
PLANEACIÓN DIDÁCTICA FO205P11000-44 DIVISIÓN (1) INGENIERÍA ELECTRONICA DOCENTE (2) ING. EDUARDO GONZALO MANUEL TZUL NOMBRE DE LA ASIGNATURA (3) AMPLIFICADORES OPERACIONALES CRÉDITOS (4) 5 CLAVE DE LA
CIRCUITOS ELÉCTRICOS. Temas:
 CIRCUITOS ELÉCTRICOS Temas: - Conceptos generales de circuitos eléctricos, ley de Ohm y de Kirchhoff. - Energía almacenada en bobinas y capacitores. - Teoremas de redes: Thevenin, Norton, superposición,
CIRCUITOS ELÉCTRICOS Temas: - Conceptos generales de circuitos eléctricos, ley de Ohm y de Kirchhoff. - Energía almacenada en bobinas y capacitores. - Teoremas de redes: Thevenin, Norton, superposición,
PRÁCTICA NÚMERO 5 LEY DE OHM
 PRÁCTICA NÚMERO 5 LEY DE OHM I. Objetivos. 1. Investigar si los siguientes elementos eléctricos son óhmicos o no: - Una resistencia comercial. - Un diodo rectificador. II. Material. 1. Dos multímetros.
PRÁCTICA NÚMERO 5 LEY DE OHM I. Objetivos. 1. Investigar si los siguientes elementos eléctricos son óhmicos o no: - Una resistencia comercial. - Un diodo rectificador. II. Material. 1. Dos multímetros.
Diseño de Control para el Motor de Corriente Continua
 Ejercicio 1 EL4D - Control de Sistemas Profesora: Dra. Doris Sáez Ayudante: Gonzalo Kaempfe (gkaempfe@ing.uchile.cl) Diseño de Control para el Motor de Corriente Continua I.- Objetivos Diseñar e implementar
Ejercicio 1 EL4D - Control de Sistemas Profesora: Dra. Doris Sáez Ayudante: Gonzalo Kaempfe (gkaempfe@ing.uchile.cl) Diseño de Control para el Motor de Corriente Continua I.- Objetivos Diseñar e implementar
SISTEMAS DE RADIOCOMUNICACIONES. Práctica # 5: SISTEMA DE CATV NTSC
 UNIVERSIDAD NACIONAL EXPERIMENTAL POLITÉCNICA ANTONIO JOSÉ DE SUCRE VICE-RECTORADO PUERTO ORDAZ LAB. DE TELECOMUNICACIONES Sección de Comunicaciones SISTEMAS DE RADIOCOMUNICACIONES Práctica # 5: SISTEMA
UNIVERSIDAD NACIONAL EXPERIMENTAL POLITÉCNICA ANTONIO JOSÉ DE SUCRE VICE-RECTORADO PUERTO ORDAZ LAB. DE TELECOMUNICACIONES Sección de Comunicaciones SISTEMAS DE RADIOCOMUNICACIONES Práctica # 5: SISTEMA
EXP204 REGULADOR DE VOLTAJE SERIE
 EXP204 REGULADOR DE VOLTAJE SERIE I.- OBJETIVOS. Diseñar un regulador de voltaje serie ajustable Comprobar el funcionamiento del regulador. Medir la resistencia de salida del regulador Medir el por ciento
EXP204 REGULADOR DE VOLTAJE SERIE I.- OBJETIVOS. Diseñar un regulador de voltaje serie ajustable Comprobar el funcionamiento del regulador. Medir la resistencia de salida del regulador Medir el por ciento