SISTEMAS ELECTRÓNICOS AVANZADOS. ING. TÉC. INDUSTRIAL ELECTRÓNICO
|
|
|
- José Ángel Castellanos Rojo
- hace 8 años
- Vistas:
Transcripción
1 INTERRUPCIONES Interrumpen la ejecución de un programa y pasan a la rutina de servicio del evento que provoca la interrupción. El vector de interrupción se encuentra en la dirección 04H de la memoria de programa. Al terminar la rutina de servicio (RETFIE) se retoma el programa en el punto de ruptura. Fuentes de interrupción: Pin INT, cambio en los terminales del puerto B (RB7:RB4). Overflow en los temporizadores. Cambio en el comparador. Fin de escritura en la memoria EEPROM de datos. Relacionadas con el Puerto Paralelo Esclavo, con la USART, con el fin de conversión A/D y en general con los módulos periféricos con que puede contar una MCU. Gestión de interrupciones mediante registros: INTCON: registro general de control y estado. En función de los periféricos disponibles por una MCU: PIE1, PIE2 (Peripheal Interrupt Enable) habilitan las interrupciones de cada periférico. PIR1 y PIR2 (Peripheal Interrupt Flag Registers) identifican el periférico que interrumpe. 32

2 REGISTRO INTCON INTERRUPCIONES Bit 7 GIE: (Global Interrupt Enable) bit de habilitación global de interrupciones 1 = Habilita las interrupciones. 0 = Inhibe todas las interrupciones. Se pone a cero cuando se reconoce una interrupción (para evitar interrupciones anidadas) y a 1 cuando se vuelve de su rutina de servicio. Bit 6 PEIE: (Peripheral Interrupt Enable) bit de habilitación de interrupciones de periféricos. 1 = Habilita las interrupciones desde los periféricos. 0 = Inhibe las interrupciones desde los periféricos. (3) En MCU con un solo periférico puede ser EEIE o ADIE Bit 5 T0IE: (Timer 0 Overflow Interrupt Enable) bit de habilitación del Timer 0. 1 = Habilita la interrupción con el desbordamiento del Timer 0. 0 = Inhibe la interrupción con el desbordamiento del Timer 0. Bit 4 INTE: (INT External Interrupt Enable) bit de habilitación de interrupción desde el pin de entrada INT. 1 = Habilita la interrupción. 0 = Inhibe la interrupción. (2) Algunas MCU no disponen de esta característica 33
 En MCU con un solo periférico puede ser EEIE o ADIE Bit 5 T0IE: (Timer 0 Overflow Interrupt Enable) bit de habilitación del Timer 0.")
3 REGISTRO INTCON INTERRUPCIONES Bit 3 RBIE: (RB Port Change Interrupt Enable) bit de habilitación de interrupción con el cambio de RB7:RB4 1 = Habilita la interrupción. 0 = Inhibe las interrupción. (2) Algunas MCU no disponen de esta característica (1) También se puede encontrar con el nombre GPIE. Bit 2 T0IF: (Timer 0 Overflow Interrupt Flag). 1 = Interrupción producida por el desbordamiento del Timer 0 (debe ser puesto a cero por SW). 0 = El Timer 0 no se ha desbordado. Bit 1 INTF: (INT External Interrupt Flag). 1 = Interrupción producida por INT (debe ser puesto a cero por SW). 0 = INT no ha interrumpido la MCU. (2) Algunas MCU no disponen de esta característica Bit 0 RBIF: (RB Port Change Interrupt Flag). 1 = Interrupción producida por el cambio en alguno de los bits RB7:RB4 (debe ser puesto a cero por SW). 0 = RB7:RB4 no han interrumpido la MCU. (2) Algunas MCU no disponen de esta característica (1) También se puede encontrar con el nombre GPIF. 34
. 0 = INT no ha interrumpido la MCU. (2) Algunas MCU no disponen de esta característica Bit 0 RBIF: (RB Port Change Interrupt Flag).")
4 LÓGICA DE INTERRUPCIONES INTERRUPCIONES Registros PIR/PIE Registro INTCON 35

5 INTERRUPCIONES TIEMPO DE LATENCIA Es el tiempo que transcurre desde que se produce un evento de interrupción hasta que se ejecuta la instrucción de la dirección 04 H. Interrupciones síncronas (normalmente internas) tiempo de latencia= 3 Tcy. Interrupciones asíncronas (normalmente externas) tiempo de latencia= 3-3,75 Tcy. 36
 tiempo de latencia= 3 Tcy.")
6 INTERRUPCIONES Respuesta a un evento en el pin INT. (1) El flag INTF se muestrea cada Q1. (2) El tiempo de latencia comprendido entre 3 y 3,75 Tcy. (3) CLKOUT disponible solo si el oscilador es RC. (4) Anchura mínima de pulso requerida en función de la MCU (para el 16F84A 20ns.) (5) INTF debe ponerse a cero por Sw. 37
 CLKOUT disponible solo si el oscilador es RC.")
7 INTERRUPCIONES Fases en la gestión de interrupciones: 1. PC->Pila y GIE=0 2. PC=0004 H 3. Se salvan los registros cuyo contenido se desee conservar (W, STATUS, etc.) PUSH 4. Se determina la fuente de interrupción (interrogando los flags correspondientes) 5. Se ejecuta la rutina de servicio a la interrupción 6. Se borra el flag relacionado con la interrupción atendida. 7. Se restauran los registros POP 8. Se ejecuta RETFIE 9. Pila->PC y GIE=1 38

8 INTERRUPCIONES Salvaguarda de W y el registro STATUS, en un rutina de servicio a una interrupción: 39

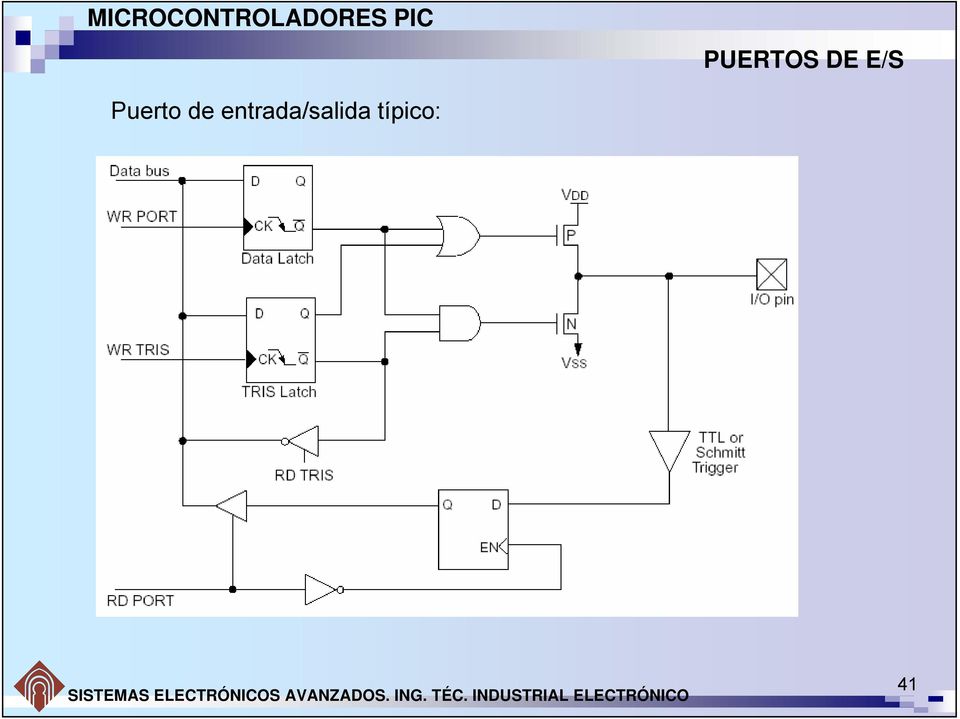
9 PUERTOS DE E/S Se pueden considerar los periféricos más sencillos, implementan las entrada-salida de la MCU. Se utilizan mediante dos registros: PORTx (datos) y TRISx (control) Pueden implementarse hasta siete puertos de características distintas (x puede sustituirse con identificadores de puerto desde la A hasta la G) Cada uno de los bits de TRISx establece la dirección de la información de su correspondiente bit (pin) en PORTx. Un 1 configura el pin como entrada. Una operación de lectura obtiene el nivel presente en el terminal implicado. Un 0 configura ese pin como salida, manteniendo el bit de salida mediante un latch. Después de un reset todos los bits de TRISx son 1. Los pines de entrada/salida pueden estar multiplexados con varios periféricos. Para conocer con exactitud las características de cada puerto en concreto es imprescindible. Consultar las hojas de características de cada dispositivo. 40

10 PUERTOS DE E/S Puerto de entrada/salida típico: 41
11 PUERTOS DE E/S Puerto A: Tiene 6 bits. RA4 Tiene entrada Trigger Schmitt y salida drenador abierto. El resto admiten niveles de entrada TTL y salida CMOS. Diagrama de bloques para RA3:RA0 y RA5. 42

12 Pin RA4: PUERTOS DE E/S Ejemplo de inicialización del puerto A 43

13 PUERTOS DE E/S Puerto B: Puerto de 8 bits bidireccionales Diagrama de bloques para RB3:RB0. 44

14 PUERTOS DE E/S Diagrama de bloques para RB7:RB4. 45

15 PUERTOS DE E/S La escritura en un puerto implica una lectura-modificación-escritura. Puede acarrear problemas en operaciones de escritura sobre puertos en los que unos pines están configurados como entradas y otros como salidas: 46

16 Operaciones sucesivas sobre un puerto de entrada salida Escritura y lectura sobre el puerto B: PUERTOS DE E/S A frecuencias de reloj más altas, una escritura seguida por una lectura puede ser problemática debido a la capacidad externa, en esos casos puede ser conveniente utilizar NOP entre esas instrucciones. 47

17 PUERTOS DE E/S Operaciones sucesivas sobre un puerto de entrada salida Operaciones que implican lectura-modificación escritura: 48

18 TIMER 0 Características: Contador temporizador de 8 bits Accesible mediante operaciones de lectura y escritura. Incorpora un prescaler de 8 bits programable por Sw. Reloj interno o externo. Selección del flanco del reloj externo Puede producir una interrupción al debordarse. 49

19 REGISTRO OPTION_REG TIMER 0 Bit 7 RBPU : bit de habilitación de resistencias pull-up 1 = Inhibidas 0 = habilitadas Bit 6 INTEDG: bit de selección del flanco activo de la interrupción INT 1 = Flanco ascendente 0 = Flanco descendete Bit 5 T0CS: bit de selección de reloj para TMR0 1 = Transición del pin T0CKI (reloj externo). 0 = Reloj interno (CLKOUT). Bit 4 T0SE: bit de selección de flanco cuando el reloj es externo 1 = Flanco de bajada de T0CKI. 0 = Flanco de subida de T0CKI 50

20 REGISTRO OPTION_REG TIMER 0 Bit3 PSA: bit de asignación del prescaler 1 = Prescaler asignado al WDT. 0 = Prescaler asignado al TIMER 0. Bit 2:0 PS2:PS0: Valor de división del prescaler PS2 TMR0 WDT :2 1: :4 1: :8 1: :16 1: :32 1: :64 1: :128 1: :256 1:128 51

21 TIMER 0 Escritura en TMR0 (reloj interno, sin prescaler): Una escritura en TMR0 provoca dos ciclos de instrucción (2Tcy) en los que no se puede volver a escribir en él. 52
22 TIMER 0 Escritura en TMR0 (reloj interno, prescaler 1:2): Una escritura en TMR0 actualiza el registro e inicializa el prescaler. El incremento del temporizador 0 (TMR0+prescaler) se inhibe durante dos ciclos de instrucción (2 Tcy), como el prescaler está configurado como divisor por 2, el temporizador 0 no se incrementará durante 4 tiempos de reloj. 53
23 TIMER 0 Temporización de la interrupción del timer 0: 54
24 TIMER 0 Sincronización con reloj externo: T0CKI debe se 1 al menos 2TOSC El reloj/prescaler se muestrea en Q2 y Q4 55
25 TIMER 0 56
26 TIMER 0 57
27 TIMER 0 58
Microcontroladores PIC
 Microcontroladores PIC 1 Características generales: Arquitectura Harvard, procesador segmentado. Compatibilidad software entre los modelos de la misma gama. Sencillez de uso y herramientas de desarrollo
Microcontroladores PIC 1 Características generales: Arquitectura Harvard, procesador segmentado. Compatibilidad software entre los modelos de la misma gama. Sencillez de uso y herramientas de desarrollo
Tema 14. Interrupciones. Las. C. F. G.S. D.P.E. Módulo de Proyectos 1
 Tema 14 Las Interrupciones C. F. G.S. D.P.E. Módulo de Proyectos 1 Los PIC de la familia 16F8X poseen 4 fuentes de interrupción: Interrupción externa a través del pin RB0/INT Interrupción por overflow
Tema 14 Las Interrupciones C. F. G.S. D.P.E. Módulo de Proyectos 1 Los PIC de la familia 16F8X poseen 4 fuentes de interrupción: Interrupción externa a través del pin RB0/INT Interrupción por overflow
Pines de entrada/salida (I/O) de propósito general. Mediante ellos, el micro PIC puede monitorizar y controlar otros dispositivos.
 de propósito general. Mediante ellos, el micro PIC puede monitorizar y controlar otros dispositivos.") 1 Pines de entrada/salida (I/O) de propósito general Mediante ellos, el micro PIC puede monitorizar y controlar otros dispositivos. Para añadir flexibilidad al micro, muchos de sus pines de entrada/salida
1 Pines de entrada/salida (I/O) de propósito general Mediante ellos, el micro PIC puede monitorizar y controlar otros dispositivos. Para añadir flexibilidad al micro, muchos de sus pines de entrada/salida
Temporizadores y contadores en tiempo real: El módulo Timer0 y el prescaler del PIC
 Temporizadores y contadores en tiempo real: El módulo Timer0 y el aler del PIC 1. Introducción...1 2. Estructura del Timer0...1 3. Funcionamiento del Timer0...2 3.1. Entrada de reloj del modulo Timer0...
Temporizadores y contadores en tiempo real: El módulo Timer0 y el aler del PIC 1. Introducción...1 2. Estructura del Timer0...1 3. Funcionamiento del Timer0...2 3.1. Entrada de reloj del modulo Timer0...
TUTORIAL PRIMERA PARTE: GENERACIÓN DE UN RETARDO CON TIMER.
 1 TUTORIAL OBJETIVOS Familiarizarse con el TMR0 como contador de pulsos internos y generador de retardos. Conocer el método del polling para verificar banderas de dispositivos. Crear y manipular variables
1 TUTORIAL OBJETIVOS Familiarizarse con el TMR0 como contador de pulsos internos y generador de retardos. Conocer el método del polling para verificar banderas de dispositivos. Crear y manipular variables
Temporizadores y contadores en tiempo real: El módulo Timer0 del PIC.
 Temporizadores y contadores en tiempo real: El módulo Timer0 del PIC. 1. Introducción... 1 2. Funcionamiento del Timer0... 1 2.1. Estructura general del Timer0...2 2.2. Entrada de reloj del modulo Timer0...2
Temporizadores y contadores en tiempo real: El módulo Timer0 del PIC. 1. Introducción... 1 2. Funcionamiento del Timer0... 1 2.1. Estructura general del Timer0...2 2.2. Entrada de reloj del modulo Timer0...2
Tema. Módulo Captura Comparación Modulación n de Achura de Pulsos. C. F. G.S. D.P.E. Módulo de Proyectos 1
 Tema Módulo Captura Comparación Modulación n de Achura de Pulsos C. F. G.S. D.P.E. Módulo de Proyectos 1 Módulo de Captura/ aptura/comparación/ n/pwm Los microcontroladores de la familia 16F87X disponen
Tema Módulo Captura Comparación Modulación n de Achura de Pulsos C. F. G.S. D.P.E. Módulo de Proyectos 1 Módulo de Captura/ aptura/comparación/ n/pwm Los microcontroladores de la familia 16F87X disponen
Características Técnicas del PIC 16F84
 Características Técnicas del PIC 16F84 Repertorio de 35 Instrucciones. Todas las instrucciones se ejecutan en un solo ciclo excepto las de salto que necesitan dos. Versiones de 4 MHz (PIC16F84-04) y 10
Características Técnicas del PIC 16F84 Repertorio de 35 Instrucciones. Todas las instrucciones se ejecutan en un solo ciclo excepto las de salto que necesitan dos. Versiones de 4 MHz (PIC16F84-04) y 10
MICROCONTROLADORES PIC EEPROM. Memoria de programa Características
 EEPROM. Memoria de programa Características Algunos dispositivos pueden leer la memoria de programa. Leer checksums, calibración de datos, tablas. 14-bits de datos comparados con los 8 de retlw 0xnn Accesibles
EEPROM. Memoria de programa Características Algunos dispositivos pueden leer la memoria de programa. Leer checksums, calibración de datos, tablas. 14-bits de datos comparados con los 8 de retlw 0xnn Accesibles
El TIMER 0. (c) Domingo Llorente 2010 1
 Domingo Llorente 2010 1") El TIMER 0 (c) Domingo Llorente 2010 1 Características Se trata de un registro de 8 bits. (SFR: 01h, 101h) Puede trabajar como contador o temporizador. Se puede leer o escribir en él. Dispone de un preescaler
El TIMER 0 (c) Domingo Llorente 2010 1 Características Se trata de un registro de 8 bits. (SFR: 01h, 101h) Puede trabajar como contador o temporizador. Se puede leer o escribir en él. Dispone de un preescaler
UNIVERSIDAD TECNICA FEDERICO SANTA MARIA DEPARTAMENTO DE ELECTRONICA Diseño con Microcontroladores
 WATCHDOG TIMER El watchdog timer es un temporizador de 16 bit que puede ser usado como watchdog o por intervalos de tiempo. Al iniciarse un programa, el watchdog timer está activo y configurado por defecto
WATCHDOG TIMER El watchdog timer es un temporizador de 16 bit que puede ser usado como watchdog o por intervalos de tiempo. Al iniciarse un programa, el watchdog timer está activo y configurado por defecto
Interrupciones Fuentes de Interrupciones para el PIC16F1787
 Fuentes de para el PIC16F1787 Interrupción externa a través del pin RB0/INT Interrupción por cambio de nivel Interrupción por escritura en la EEPROM Interrupción por desbordamiento del TMR0 Interrupción
Fuentes de para el PIC16F1787 Interrupción externa a través del pin RB0/INT Interrupción por cambio de nivel Interrupción por escritura en la EEPROM Interrupción por desbordamiento del TMR0 Interrupción
Aplicaciones de mc Lenguaje C- CC5x-Temporizadores
 Aplicaciones de mc Lenguaje C- CC5x-Temporizadores Preparado por : Juan Ignacio Huircán Departamento de Ingeniería Eléctrica Universidad de La Frontera Otoño 29 Introducción El µc posee 3 Módulos Timer,
Aplicaciones de mc Lenguaje C- CC5x-Temporizadores Preparado por : Juan Ignacio Huircán Departamento de Ingeniería Eléctrica Universidad de La Frontera Otoño 29 Introducción El µc posee 3 Módulos Timer,
Ensamblador. Interrupciones. Dentro de una computadora existen dos clases de interrupciones:
 Ensamblador Interrupciones Definición: Una interrupción es el rompimiento en la secuencia de un programa para ejecutar un programa especial llamando una rutina de servicio cuya característica principal
Ensamblador Interrupciones Definición: Una interrupción es el rompimiento en la secuencia de un programa para ejecutar un programa especial llamando una rutina de servicio cuya característica principal
Señal de petición de Interrupción
 Consideren una tarea que require tomar caracteres desde un teclado y mostrarlos en la pantalla de un monitor. La tasa de transferencia desde un teclado a un computador está limitado por la velocidad del
Consideren una tarea que require tomar caracteres desde un teclado y mostrarlos en la pantalla de un monitor. La tasa de transferencia desde un teclado a un computador está limitado por la velocidad del
Microcontroladores de Atmel
 Microcontroladores de Atmel Familia AVR Ing. Marone José Introducción: Historia Los AVR son una familia de microcontroladores RISC de Atmel. La arquitectura de los AVR fue concebida por dos estudiantes
Microcontroladores de Atmel Familia AVR Ing. Marone José Introducción: Historia Los AVR son una familia de microcontroladores RISC de Atmel. La arquitectura de los AVR fue concebida por dos estudiantes
PUERTOS DE ENTRADA Y SALIDA
 PUERTOS DE ENTRADA Y SALIDA El microcontrolador Z8 PLUS dedica 14 líneas para puertos de entrada y salida. Estas líneas están agrupadas en dos puertos conocidos como el Puerto A y el Puerto B. El puerto
PUERTOS DE ENTRADA Y SALIDA El microcontrolador Z8 PLUS dedica 14 líneas para puertos de entrada y salida. Estas líneas están agrupadas en dos puertos conocidos como el Puerto A y el Puerto B. El puerto
RB7/PGD RB6/PGC RB5 RB4 RB3/PGM RB2. RB1 RB0/INT VDD Vss RD7/PSP7 RD6/PSP6 RD5/PSP5 RD4/PSP4 RC7/RX/DT RC6/TX/CK RC5/SD0 RC4/SDI/SDA RD3/PSP3 RD2/PSP2
 LOS PIC16F87X Características Generales D. de B L O Q U E S 1 D. de B L O Q U E S D. de B L O Q U E S 2 Características (1) Procesador de arquitectura RISC avanzada Juego de solo 35 instrucciones con 14
LOS PIC16F87X Características Generales D. de B L O Q U E S 1 D. de B L O Q U E S D. de B L O Q U E S 2 Características (1) Procesador de arquitectura RISC avanzada Juego de solo 35 instrucciones con 14
podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que el
 CAPÍTULO 4 Funcionamiento del Robot Después de analizar paso a paso el diseño y funcionamiento de la interfase, nos podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que
CAPÍTULO 4 Funcionamiento del Robot Después de analizar paso a paso el diseño y funcionamiento de la interfase, nos podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que
DESCRIPCION DEL SITEMA MASTER.
 DESCRIPCION DEL SITEMA MASTER. ESTRUCTURA. El sistema MASTER (Sistema Modular para Control Adaptativo en Tiempo Real) se ha implementado en base a un computador compatible PC-AT, dotado de una tarjeta
DESCRIPCION DEL SITEMA MASTER. ESTRUCTURA. El sistema MASTER (Sistema Modular para Control Adaptativo en Tiempo Real) se ha implementado en base a un computador compatible PC-AT, dotado de una tarjeta
Modos de ahorro de energía a en los chips CMOS
 Modos de ahorro de energía a en los chips CMOS MODOS DE OPERACIÓN N DE AHORRO DE ENERGÍA Para aplicaciones donde el consumo de potencia es crítico las versiones CMOS proporcionan modos de operación de
Modos de ahorro de energía a en los chips CMOS MODOS DE OPERACIÓN N DE AHORRO DE ENERGÍA Para aplicaciones donde el consumo de potencia es crítico las versiones CMOS proporcionan modos de operación de
INTERRUPCIONES. La comunicación asíncrona de los sistemas periféricos con la CPU, en ambos sentidos, se puede establecer de dos maneras fundamentales:
 INTERRUPCIONES La comunicación asíncrona de los sistemas periféricos con la CPU, en ambos sentidos, se puede establecer de dos maneras fundamentales: a)consultas (POLLING): Se comprueban cíclicamente,
INTERRUPCIONES La comunicación asíncrona de los sistemas periféricos con la CPU, en ambos sentidos, se puede establecer de dos maneras fundamentales: a)consultas (POLLING): Se comprueban cíclicamente,
Cartilla para Microcontrolador PIC16F877. 28/40 Pin 8-Bit CMOS FLASH.
 Cartilla para Microcontrolador PIC16F877 28/40 Pin 8-Bit CMOS FLASH. Características principales CPU RISC de alta performance Set de35 instrucciones Todas las instrucciones son de un ciclo salvo aquellas
Cartilla para Microcontrolador PIC16F877 28/40 Pin 8-Bit CMOS FLASH. Características principales CPU RISC de alta performance Set de35 instrucciones Todas las instrucciones son de un ciclo salvo aquellas
Requerimientos Principales de un Sistema Operativo. Descripción y Control de Procesos. Proceso
 Requerimientos Principales de un Sistema Operativo Descripción y Control de Procesos Capítulo 3 Entrelazar la ejecución de varios procesos para maximizar el uso del procesador a la vez que se mantiene
Requerimientos Principales de un Sistema Operativo Descripción y Control de Procesos Capítulo 3 Entrelazar la ejecución de varios procesos para maximizar el uso del procesador a la vez que se mantiene
Programación y diseño de dispositivos mediante microcontroladores PIC
 Metodología de Programación, Programación en C, Aplicaciones electrónicas 1 / 7 Programación y diseño de dispositivos mediante microcontroladores PIC Hemos elegido el microcontrolador PIC16F84 por las
Metodología de Programación, Programación en C, Aplicaciones electrónicas 1 / 7 Programación y diseño de dispositivos mediante microcontroladores PIC Hemos elegido el microcontrolador PIC16F84 por las
Taller de Firmware. Introducción al PIC16F877. Facultad de Ingeniería Instituto de Com putación
 Taller de Firmware Introducción al PIC16F877 Facultad de Ingeniería Instituto de Com putación Contenido Introducción a los microcontroladores PIC. Presentación del PIC 16F877. Introducción a los microcontroladores
Taller de Firmware Introducción al PIC16F877 Facultad de Ingeniería Instituto de Com putación Contenido Introducción a los microcontroladores PIC. Presentación del PIC 16F877. Introducción a los microcontroladores
INTERRUPCIONES. Existen 256 interrupciones En el modo real cada una tiene un vector asociado Vectores de 4 bytes: segmento + offset 32 F0 50 8A
 Tres tipos de interrupciones: Internas (TRAPS) Externas (HARDWARE) Software Existen 256 interrupciones En el modo real cada una tiene un vector asociado Vectores de 4 bytes: segmento + offset... 0000:0008
Tres tipos de interrupciones: Internas (TRAPS) Externas (HARDWARE) Software Existen 256 interrupciones En el modo real cada una tiene un vector asociado Vectores de 4 bytes: segmento + offset... 0000:0008
Maqueta: Osciloscopio y generador
 Maqueta: Osciloscopio y generador 1. Introducción Esta práctica se divide en dos partes. En la primera se desarrolla un osciloscopio digital basado en el ADC del 80C537 y la pantalla del PC. En la segunda
Maqueta: Osciloscopio y generador 1. Introducción Esta práctica se divide en dos partes. En la primera se desarrolla un osciloscopio digital basado en el ADC del 80C537 y la pantalla del PC. En la segunda
REGISTROS DE DESPLAZAMIENTO
 REGISTROS DE DESPLAZAMIENTO Es un circuito digital que acepta datos binarios de una fuente de entrada y luego los desplaza, un bit a la vez, a través de una cadena de flip-flops. Este sistema secuencial
REGISTROS DE DESPLAZAMIENTO Es un circuito digital que acepta datos binarios de una fuente de entrada y luego los desplaza, un bit a la vez, a través de una cadena de flip-flops. Este sistema secuencial
BLOQUE 3. Enrique Mandado Pérez María José Moure Rodríguez. Microcontroladores
 SISTEMAS ELECTRÓNICOS DIGITALES BLOQUE 3 MICROCONTROLADORES (PARTE 4) DESARROLLO DE SISTEMAS ELECTRÓNICOS DIGITALES Interrupciones,Temporizadores/Contadores y Puerto serie Enrique Mandado Pérez María José
SISTEMAS ELECTRÓNICOS DIGITALES BLOQUE 3 MICROCONTROLADORES (PARTE 4) DESARROLLO DE SISTEMAS ELECTRÓNICOS DIGITALES Interrupciones,Temporizadores/Contadores y Puerto serie Enrique Mandado Pérez María José
Control y temporización Comunicación con la CPU Comunicación con el dispositivo externo Almacén temporal de datos Detección de errores
 UNIDAD DE ENTRADA SALIDA Conceptos Unidad de entrada-salida (E/S): Elemento que proporciona un método de comunicación eficaz entre el sistema central y el periférico. Funciones Control y temporización
UNIDAD DE ENTRADA SALIDA Conceptos Unidad de entrada-salida (E/S): Elemento que proporciona un método de comunicación eficaz entre el sistema central y el periférico. Funciones Control y temporización
Universidad Autónoma de Baja California Facultad de Ingeniería Mexicali
 Sumadores En este documento se describe el funcionamiento del circuito integrado 7483, el cual implementa un sumador binario de 4 bits. Adicionalmente, se muestra la manera de conectarlo con otros dispositivos
Sumadores En este documento se describe el funcionamiento del circuito integrado 7483, el cual implementa un sumador binario de 4 bits. Adicionalmente, se muestra la manera de conectarlo con otros dispositivos
Microprocesadores, Tema 6:
 Microprocesadores, Tema 6: Módulos CCP (Capturar / Comparar / PWM) Guillermo Carpintero Marta Ruiz Universidad Carlos III de Madrid Objetivos Estudiar los diferentes modos de funcionamiento de los módulos
Microprocesadores, Tema 6: Módulos CCP (Capturar / Comparar / PWM) Guillermo Carpintero Marta Ruiz Universidad Carlos III de Madrid Objetivos Estudiar los diferentes modos de funcionamiento de los módulos
Tema 6: Microcontroladores
 Tema 6: Microcontroladores Carlos Garre del Olmo 1 Microcontroladores Contenidos Introducción a los microcontroladores. Principales familias y sus características. La familia PIC16. Diseño de sistemas
Tema 6: Microcontroladores Carlos Garre del Olmo 1 Microcontroladores Contenidos Introducción a los microcontroladores. Principales familias y sus características. La familia PIC16. Diseño de sistemas
TEMA 3: Control secuencial
 TEMA 3: Control secuencial Esquema: Índice de contenido TEMA 3: Control secuencial...1 1.- Introducción...1 2.- Biestables...3 2.1.- Biestables asíncronos: el Biestable RS...4 2.1.1.- Biestable RS con
TEMA 3: Control secuencial Esquema: Índice de contenido TEMA 3: Control secuencial...1 1.- Introducción...1 2.- Biestables...3 2.1.- Biestables asíncronos: el Biestable RS...4 2.1.1.- Biestable RS con
La memoria principal. Los subsistemas de E/S. Los buses del sistema
 GUIA 23: MEMORIA E/S La estructura básica de la mayoría de los ordenadores actuales se representa mediante los siguientes elementos básicos: La Unidad Central de Procesamiento, CPU La memoria principal
GUIA 23: MEMORIA E/S La estructura básica de la mayoría de los ordenadores actuales se representa mediante los siguientes elementos básicos: La Unidad Central de Procesamiento, CPU La memoria principal
TEMA 20.0. EL BUS I 2 C (Inter Integrated Circuit Bus) I2C EN C
 I2C EN C") TEMA 20.0 EL BUS I 2 C (Inter Integrated Circuit Bus) I2C EN C La comunicación n serie en los PIC 16F87X Los microcontroladores PIC de la familia 16F78x, tienen la posibilidad de comunicación serie, las
TEMA 20.0 EL BUS I 2 C (Inter Integrated Circuit Bus) I2C EN C La comunicación n serie en los PIC 16F87X Los microcontroladores PIC de la familia 16F78x, tienen la posibilidad de comunicación serie, las
INSTITUTO TECNOLÓGICO SUPERIOR DE PÁNUCO APUNTES DE LA MATERIA DE: MICROPROCESADORES Y MICROCONTROLADORES I
 INSTITUTO TECNOLÓGICO SUPERIOR DE PÁNUCO APUNTES DE LA MATERIA DE: MICROPROCESADORES Y MICROCONTROLADORES I DEPARTAMENTO DE INGENIERÍA ELECTRÓNICA ING. FORTINO VÁZQUEZ ELORZA Documento traducido de la
INSTITUTO TECNOLÓGICO SUPERIOR DE PÁNUCO APUNTES DE LA MATERIA DE: MICROPROCESADORES Y MICROCONTROLADORES I DEPARTAMENTO DE INGENIERÍA ELECTRÓNICA ING. FORTINO VÁZQUEZ ELORZA Documento traducido de la
Control Digital en PC con MS-DOS
 Control Digital en PC con MS-DOS Abel Alberto Cuadrado Vega 19 de abril de 2006 1. Introducción Un PC puede ser utilizado para realizar un sistema de control digital. Para ello necesita lo siguiente: tarjeta
Control Digital en PC con MS-DOS Abel Alberto Cuadrado Vega 19 de abril de 2006 1. Introducción Un PC puede ser utilizado para realizar un sistema de control digital. Para ello necesita lo siguiente: tarjeta
STEP 7 INDICE. Contadores rápidos Restricciones en el uso de los contadores rápidos HSC0, HSC3, HSC4, HSC5
 Programación n de Autómatas STEP 7 Contadores Rápidos R (HSC) ISA-UMH 1 INDICE Introducción Contadores rápidos Restricciones en el uso de los contadores rápidos HSC0, HSC3, HSC4, HSC5 Utilización de los
Programación n de Autómatas STEP 7 Contadores Rápidos R (HSC) ISA-UMH 1 INDICE Introducción Contadores rápidos Restricciones en el uso de los contadores rápidos HSC0, HSC3, HSC4, HSC5 Utilización de los
BUS I2C: IMPLEMENTACIÓN PRÁCTICA CON MICROCONTROLADORES PIC MEMORIAS EEPROM SERIE
 BUS I2C: IMPLEMENTACIÓN PRÁCTICA CON MICROCONTROLADORES PIC MEMORIAS EEPROM SERIE Fernando Nuño García 1 Ventajas del BUS I2C Definido inicialmente a mediados de los 80 para trabajar a 100kbit/s y en 1995
BUS I2C: IMPLEMENTACIÓN PRÁCTICA CON MICROCONTROLADORES PIC MEMORIAS EEPROM SERIE Fernando Nuño García 1 Ventajas del BUS I2C Definido inicialmente a mediados de los 80 para trabajar a 100kbit/s y en 1995
Memoria 24LC256 I. I NTRODUCCIÓN
 1 Memoria 24LC256 I. I NTRODUCCIÓN I2C es un bus de comunicación serial sincrónica desarrollado por Phillips Semiconductors a principios de los años 80 s, con la principal intención de interconectar una
1 Memoria 24LC256 I. I NTRODUCCIÓN I2C es un bus de comunicación serial sincrónica desarrollado por Phillips Semiconductors a principios de los años 80 s, con la principal intención de interconectar una
Cursos de Perfeccionamiento
 www.infoplc.net 1 INDICE Introducción Contadores rápidos Restricciones en el uso de los contadores rápidos HSC0, HSC3, HSC4, HSC5 Utilización de los contadores rápidos Direccionamiento de los contadores
www.infoplc.net 1 INDICE Introducción Contadores rápidos Restricciones en el uso de los contadores rápidos HSC0, HSC3, HSC4, HSC5 Utilización de los contadores rápidos Direccionamiento de los contadores
Actividad 4: Comunicación entre PLC s vía Ethernet
 Actividad 4: Comunicación entre PLC s vía Ethernet 1.- Listado de materiales: PC con Tarjeta de red 3com o similar. 2 PLC Omrom CJ1M CPU11 ETN Estos autómatas llevan integrada la tarjeta de comunicaciones
Actividad 4: Comunicación entre PLC s vía Ethernet 1.- Listado de materiales: PC con Tarjeta de red 3com o similar. 2 PLC Omrom CJ1M CPU11 ETN Estos autómatas llevan integrada la tarjeta de comunicaciones
MICROCONTROLADOR PIC DE MICROCHIP
 MICROCONTROLADOR PIC DE MICROCHIP PIC16F877-28-PIN 8-BIT CMOS FLASH MICROCONTROLLER PIC16F877: ESTRUCTURA INTERNA Bus de Datos Bus de Datos (programa) Registro de trabajo (acumulador) Conversor A/D Contador/Temporizador
MICROCONTROLADOR PIC DE MICROCHIP PIC16F877-28-PIN 8-BIT CMOS FLASH MICROCONTROLLER PIC16F877: ESTRUCTURA INTERNA Bus de Datos Bus de Datos (programa) Registro de trabajo (acumulador) Conversor A/D Contador/Temporizador
Entrada/Salida. Polling e Interrupciones. Verano de 2011. Mariano Moscato. Organización del Computador 1
 Entrada/Salida Polling e Interrupciones Mariano Moscato Organización del Computador 1 Verano de 2011 El GuidoBot Robot docente Basado en tecnología ORGA1 tiene un procesador y una memoria ORGA1 Sus dispositivos
Entrada/Salida Polling e Interrupciones Mariano Moscato Organización del Computador 1 Verano de 2011 El GuidoBot Robot docente Basado en tecnología ORGA1 tiene un procesador y una memoria ORGA1 Sus dispositivos
BUS I2C. IES Los Viveros Sevilla Dpto. Electrónica. 1
 BUS I2C Se trata de un protocolo serie desarrollado por Philips Semiconductors usado por muchos integrados para comunicarse entre ellos, para su funcionamiento requiere sólo dos líneas, una de reloj (SCL)
BUS I2C Se trata de un protocolo serie desarrollado por Philips Semiconductors usado por muchos integrados para comunicarse entre ellos, para su funcionamiento requiere sólo dos líneas, una de reloj (SCL)
Unidad 1: Conceptos generales de Sistemas Operativos.
 Unidad 1: Conceptos generales de Sistemas Operativos. Tema 2: Estructura de los sistemas de computación. 2.1 Funcionamiento de los sistemas de computación. 2.2 Ejecución de instrucciones e interrupciones
Unidad 1: Conceptos generales de Sistemas Operativos. Tema 2: Estructura de los sistemas de computación. 2.1 Funcionamiento de los sistemas de computación. 2.2 Ejecución de instrucciones e interrupciones
PROBLEMAS DE FUNDAMENTOS DE TECNOLOGÍA DE COMPUTADORES T5. MEMORIAS
 PROBLEMAS DE FUNDAMENTOS DE TECNOLOGÍA DE COMPUTADORES T5. MEMORIAS Tema 5 Memorias Hoja: 2 / 14 Base teórica La memoria es el lugar en el que se almacenan las instrucciones y los datos para que se puedan
PROBLEMAS DE FUNDAMENTOS DE TECNOLOGÍA DE COMPUTADORES T5. MEMORIAS Tema 5 Memorias Hoja: 2 / 14 Base teórica La memoria es el lugar en el que se almacenan las instrucciones y los datos para que se puedan
Proyecto final Diseño de un circuito secuencial. utilizando un contador binario de cuatro bits
 Instituto tecnológico de Oaxaca Electrónica digital II ECC047 Proyecto final Diseño de un circuito secuencial utilizando un contador binario de cuatro bits Catedrático: Alumno: Rodríguez Calvo Enrique
Instituto tecnológico de Oaxaca Electrónica digital II ECC047 Proyecto final Diseño de un circuito secuencial utilizando un contador binario de cuatro bits Catedrático: Alumno: Rodríguez Calvo Enrique
SOFTWARE CSU-485. Para conectar el dispositivo CSU-485 lo podemos hacer de dos maneras:
 SOFTWARE CSU-485 El Software CSU-485, es un software utilizado para configurar el dispositivo CSU-485, como la configuración del rango de la entrada analógica o el registro de datos. También es posible
SOFTWARE CSU-485 El Software CSU-485, es un software utilizado para configurar el dispositivo CSU-485, como la configuración del rango de la entrada analógica o el registro de datos. También es posible
TIMER0 (T0) TMR0 (01h,101h)
 TMR0 (01h,101h)") TIMER (T) Contador ascendente de 8bits Prescaler desde :2 hasta :256 Timer: entrada del reloj del sistema T CY =4*T osc =(F osc /4) t DESBORDE =4*T osc *(2 8 TMR)*N ;Prescaler :N Contador: entrada externa
TIMER (T) Contador ascendente de 8bits Prescaler desde :2 hasta :256 Timer: entrada del reloj del sistema T CY =4*T osc =(F osc /4) t DESBORDE =4*T osc *(2 8 TMR)*N ;Prescaler :N Contador: entrada externa
RECURSOS FUNDAMENTALES
 RECURSOS FUNDAMENTALES Los recursos que se considerarán son : Temporizadores Puertos de E/S La Palabra de Configuración EEPROM de datos 1 TEMPORIZADORES Una labor habitual en los programas de control suele
RECURSOS FUNDAMENTALES Los recursos que se considerarán son : Temporizadores Puertos de E/S La Palabra de Configuración EEPROM de datos 1 TEMPORIZADORES Una labor habitual en los programas de control suele
El modo TIMER, (contador de tiempos) es seleccionado poniendo a cero el bit de T0CS (OPTION<5>).
 es seleccionado poniendo a cero el bit de T0CS (OPTION<5>).") 6.0 El MÓDULO TIMER-0 El módulo Timer0 tiene las siguientes características: Temporizador/contador de 8-BIT Capacidad de lectura/grabación. Prescaler (circuito divisor de frecuencias programable por software)
6.0 El MÓDULO TIMER-0 El módulo Timer0 tiene las siguientes características: Temporizador/contador de 8-BIT Capacidad de lectura/grabación. Prescaler (circuito divisor de frecuencias programable por software)
TEMA III - Interrupciones en Sistemas en Tiempo Real
 1 TEMA III - Interrupciones en Sistemas en Tiempo Real 3.1. Introducción Definición. Objetivo. Mecanismo básico. Ejemplo. Muestreo o polling. 3.2. Interrupciones Simples Componentes. Mecanismo. Ejemplo.
1 TEMA III - Interrupciones en Sistemas en Tiempo Real 3.1. Introducción Definición. Objetivo. Mecanismo básico. Ejemplo. Muestreo o polling. 3.2. Interrupciones Simples Componentes. Mecanismo. Ejemplo.
2º CURSO INGENIERÍA TÉCNICA EN INFORMÁTICA DE GESTIÓN TEMA 5 ENTRADA/SALIDA. JOSÉ GARCÍA RODRÍGUEZ JOSÉ ANTONIO SERRA PÉREZ Tema 5.
 ARQUITECTURAS DE COMPUTADORES 2º CURSO INGENIERÍA TÉCNICA EN INFORMÁTICA DE GESTIÓN TEMA 5 ENTRADA/SALIDA JOSÉ GARCÍA RODRÍGUEZ JOSÉ ANTONIO SERRA PÉREZ Tema 5. Unidad de E/S 1 Unidad de E/S Indice Introducción.
ARQUITECTURAS DE COMPUTADORES 2º CURSO INGENIERÍA TÉCNICA EN INFORMÁTICA DE GESTIÓN TEMA 5 ENTRADA/SALIDA JOSÉ GARCÍA RODRÍGUEZ JOSÉ ANTONIO SERRA PÉREZ Tema 5. Unidad de E/S 1 Unidad de E/S Indice Introducción.
Requerimientos principales de un sistema operativo
 Descripción y control de procesos Requerimientos principales de un sistema operativo Intercalar la ejecución de varios procesos para maximizar el uso del procesador proporcionando un tiempo de respuesta
Descripción y control de procesos Requerimientos principales de un sistema operativo Intercalar la ejecución de varios procesos para maximizar el uso del procesador proporcionando un tiempo de respuesta
Microcontroladores PIC
 Microcontroladores PIC Procesador RISC. Arquitectura Harvard Pipeline Formato de instrucciones ortogonal Arquitectura basada en banco de registros Distintos periféricos: temporizadores, puertos paralelo/serie,
Microcontroladores PIC Procesador RISC. Arquitectura Harvard Pipeline Formato de instrucciones ortogonal Arquitectura basada en banco de registros Distintos periféricos: temporizadores, puertos paralelo/serie,
Curso sobre Microcontroladores Familia HC9S08 de Freescale
 Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: info@edudevices.com.ar Responsable Area Educación ELKO / ARROW www.elkonet.com
Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: info@edudevices.com.ar Responsable Area Educación ELKO / ARROW www.elkonet.com
Manual de usuario para Android de la aplicación PORTAFIRMAS MÓVIL
 Manual de usuario para Android de la aplicación PORTAFIRMAS MÓVIL Índice 1 Introducción... 5 1.1 Perfil de la aplicación... 5 1.2 Requisitos técnicos... 5 2 Manual de usuario... 7 2.1 Instalación del certificado...
Manual de usuario para Android de la aplicación PORTAFIRMAS MÓVIL Índice 1 Introducción... 5 1.1 Perfil de la aplicación... 5 1.2 Requisitos técnicos... 5 2 Manual de usuario... 7 2.1 Instalación del certificado...
LOS PIC16F88X: Comparadores
 LOS PIC16F88X: Comparadores IES Juan de la Cierva Aprendizaje de la Electrónica a través de la Robótica Fernando Remiro Domínguez Los Comparadores Permiten comparar dos señales o tensiones analógicas y
LOS PIC16F88X: Comparadores IES Juan de la Cierva Aprendizaje de la Electrónica a través de la Robótica Fernando Remiro Domínguez Los Comparadores Permiten comparar dos señales o tensiones analógicas y
DESCRIPCION DE PLC UP32 17/07/11 MAN-PLC-UP32-01A
 1. Introducción El equipo UP32 incorpora un módulo de PLC que le permiten al usuario personalizar el funcionamiento del sistema. Esto quiere decir, que si necesita realizar operaciones lógicas que no estén
1. Introducción El equipo UP32 incorpora un módulo de PLC que le permiten al usuario personalizar el funcionamiento del sistema. Esto quiere decir, que si necesita realizar operaciones lógicas que no estén
Tema 2: Arquitectura del repertorio de instrucciones. Visión del computador que tiene el programador en bajo nivel.
 Tema 2: Arquitectura del repertorio de instrucciones Visión del computador que tiene el programador en bajo nivel. Lo que el programador en lenguaje ensamblador debe conocer para escribir programas: (1)
Tema 2: Arquitectura del repertorio de instrucciones Visión del computador que tiene el programador en bajo nivel. Lo que el programador en lenguaje ensamblador debe conocer para escribir programas: (1)
Universidad Católica Boliviana San Pablo Centro de Sistemas de Información
 ADMINISTRACIÓN DE CONTRASEÑAS DE ACCESO, PERFILES Y ROLES DE USUARIO Unidad Académica de La Paz La Universidad Católica Boliviana San Pablo cuenta con varios sistemas de información que se conectan con
ADMINISTRACIÓN DE CONTRASEÑAS DE ACCESO, PERFILES Y ROLES DE USUARIO Unidad Académica de La Paz La Universidad Católica Boliviana San Pablo cuenta con varios sistemas de información que se conectan con
Procesos. Procesos. Concurrencia de procesos. Qué es un proceso? Estados de un proceso. Modelo de 2 estados. (C) 2008 Mario Medina 1
 2008 Mario Medina 1") Procesos Procesos Mario Medina mariomedina@udec.cl El sistema operativo como administrador de procesos Controla la ejecución de procesos para optimizar criterios Asigna recursos a procesos Facilita sincronización
Procesos Procesos Mario Medina mariomedina@udec.cl El sistema operativo como administrador de procesos Controla la ejecución de procesos para optimizar criterios Asigna recursos a procesos Facilita sincronización
Laboratorio de Sistemas Embebidos Conceptos generales (2009)
") Laboratorio de Sistemas Embebidos Conceptos generales (2009) Índice Introducción a los PIC Conceptos generales sobre el dspic30f Reloj del sistema Entrada/salida con puertos paralelos Timers Interrupciones
Laboratorio de Sistemas Embebidos Conceptos generales (2009) Índice Introducción a los PIC Conceptos generales sobre el dspic30f Reloj del sistema Entrada/salida con puertos paralelos Timers Interrupciones
6-REGISTROS DEL 8086 Y DEL 80286
 ESTRUCTURA DE COMPUTADORES I (Capítulo 6: Los registros del microprocesador 8086) 1/7 6-REGISTROS DEL 8086 Y DEL 80286 6.1 INTRODUCCIÓN: Dentro del procesador existen unos contenedores especiales de 16
ESTRUCTURA DE COMPUTADORES I (Capítulo 6: Los registros del microprocesador 8086) 1/7 6-REGISTROS DEL 8086 Y DEL 80286 6.1 INTRODUCCIÓN: Dentro del procesador existen unos contenedores especiales de 16
67 65 pow: 50% Controlador SX100e Guía configuración rápida Instrucciones de Instalación y Mantenimiento. 1. Introducción
 Controlador SX100e Guía configuración rápida Instrucciones de Instalación y Mantenimiento IM-S27-12 CH Issue 1 AT MAN SX100e 67 65 pow: 50% SET PRG 8 2 EV1 EV2 EV3 RUN HLD MODE PROG RUN\STOP 1. Introducción
Controlador SX100e Guía configuración rápida Instrucciones de Instalación y Mantenimiento IM-S27-12 CH Issue 1 AT MAN SX100e 67 65 pow: 50% SET PRG 8 2 EV1 EV2 EV3 RUN HLD MODE PROG RUN\STOP 1. Introducción
Estructura de Computadores
 Estructura de Computadores Tema 4. El procesador Departamento de Informática Grupo de Arquitectura de Computadores, Comunicaciones y Sistemas UNIVERSIDAD CARLOS III DE MADRID Contenido Elementos de un
Estructura de Computadores Tema 4. El procesador Departamento de Informática Grupo de Arquitectura de Computadores, Comunicaciones y Sistemas UNIVERSIDAD CARLOS III DE MADRID Contenido Elementos de un
TEMA 7: DIAGRAMAS EN UML
 TEMA 7: DIAGRAMAS EN UML Diagramas en UML El bloque de construcción básico de UML es un Diagrama Introducción a UML 2 1 Modelo de Casos de Uso (MCU) Todos los casos de uso constituyen el MCU que describe
TEMA 7: DIAGRAMAS EN UML Diagramas en UML El bloque de construcción básico de UML es un Diagrama Introducción a UML 2 1 Modelo de Casos de Uso (MCU) Todos los casos de uso constituyen el MCU que describe
Manual Usuario Manual Usuario
 Manual Usuario Con la colaboración de : TABLA DE CONTENIDOS 1 Introducción... 7 2 Consideraciones generales... 8 2.1 Perfiles de acceso... 8 2.1.1 Administrador Intress... 8 2.1.2 Administrador entidad...
Manual Usuario Con la colaboración de : TABLA DE CONTENIDOS 1 Introducción... 7 2 Consideraciones generales... 8 2.1 Perfiles de acceso... 8 2.1.1 Administrador Intress... 8 2.1.2 Administrador entidad...
5. SECCIÓN DEL MICROCONTROLADOR (PROGRAMACIÓN)
") 5. SECCIÓN DEL MICROCONTROLADOR (PROGRAMACIÓN) En este capítulo se describe la parte más robusta del proyecto, la cual es la programación del microcontrolador. Ésta se compone esencialmente de dos partes,
5. SECCIÓN DEL MICROCONTROLADOR (PROGRAMACIÓN) En este capítulo se describe la parte más robusta del proyecto, la cual es la programación del microcontrolador. Ésta se compone esencialmente de dos partes,
CONCEPTOS BÁSICOS. + Intensidad
 CONCEPTOS BÁSICOS Si en una frase tuviera que definir que es un microcontrolador, creo que lo más acertado sería definirlo como un controlador de entrada/ salida con capacidad de decisión. Para poder explicar
CONCEPTOS BÁSICOS Si en una frase tuviera que definir que es un microcontrolador, creo que lo más acertado sería definirlo como un controlador de entrada/ salida con capacidad de decisión. Para poder explicar
Curso sobre Microcontroladores Familia HC9S08 de Freescale
 Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: info@edudevices.com.ar Capítulo 8.- Inter Integrated Circuit Interface I2C MMIIC
Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: info@edudevices.com.ar Capítulo 8.- Inter Integrated Circuit Interface I2C MMIIC
Implementación de algoritmos genéticos paralelos de grano burdo en redes locales de computadoras. Resumen
 Implementación de algoritmos genéticos paralelos de grano burdo en redes locales de computadoras. Arturo Gómez Cortés y Raúl Leal Ascencio ITESO, Guadalajara Resumen El presente trabajo describe una arquitectura
Implementación de algoritmos genéticos paralelos de grano burdo en redes locales de computadoras. Arturo Gómez Cortés y Raúl Leal Ascencio ITESO, Guadalajara Resumen El presente trabajo describe una arquitectura
Microprocesadores I - Unidad 5 Hoja 1 de 11. Año Javier Rambaldo Profesor de la cátedra de Microprocesadores I
 Microprocesadores I - Unidad 5 Hoja 1 de 11 Año 2003 Profesor de la cátedra de Microprocesadores I Unidad 5: Interrupciones en el 16F84. Rutina de servicio. Registros. Distintas formas de activar una interrupción.
Microprocesadores I - Unidad 5 Hoja 1 de 11 Año 2003 Profesor de la cátedra de Microprocesadores I Unidad 5: Interrupciones en el 16F84. Rutina de servicio. Registros. Distintas formas de activar una interrupción.
SENSOR DE MOVIMIENTO
 MANUAL DE PRODUCTO SENSOR DE MOVIMIENTO ZN1IO-DETEC Edición 2 Versión 3.1 Índice 1. Introducción... 3 2. Instalación... 4 2.1. Instalación del Sensor de Movimiento... 4 2.2. Descripción de elementos...
MANUAL DE PRODUCTO SENSOR DE MOVIMIENTO ZN1IO-DETEC Edición 2 Versión 3.1 Índice 1. Introducción... 3 2. Instalación... 4 2.1. Instalación del Sensor de Movimiento... 4 2.2. Descripción de elementos...
Organización de Computadoras. Turno Recursantes Clase 8
 Organización de Computadoras Turno Recursantes Clase 8 Temas de Clase Subsistema de Memoria Organización de Memoria Principal Notas de clase 8 2 Memoria Velocidad del procesador: se duplica cada 18 meses
Organización de Computadoras Turno Recursantes Clase 8 Temas de Clase Subsistema de Memoria Organización de Memoria Principal Notas de clase 8 2 Memoria Velocidad del procesador: se duplica cada 18 meses
TEMA 5 LA MEMORIA DE DATOS MEMORIA RAM D.P.E. DESARROLLO DE PROYECTOS 1
 TEMA 5 LA MEMORIA DE DATOS MEMORIA RAM D.P.E. DESARROLLO DE PROYECTOS 1 Estructura De La Memoria Ram (1) La memoria de datos RAM está dividida en dos partes diferenciadas: 1.- Zona SFR o zona de Registros
TEMA 5 LA MEMORIA DE DATOS MEMORIA RAM D.P.E. DESARROLLO DE PROYECTOS 1 Estructura De La Memoria Ram (1) La memoria de datos RAM está dividida en dos partes diferenciadas: 1.- Zona SFR o zona de Registros
MEMORIAS DE SEMICONDUCTORES
 MEMORIAS DE SEMICONDUCTORES Se ha visto anteriormente que un registro (latch o flip-flop) puede almacenar un bit. Para almacenar una gran cantidad de bits, se recurre al uso de memorias. Una memoria, en
MEMORIAS DE SEMICONDUCTORES Se ha visto anteriormente que un registro (latch o flip-flop) puede almacenar un bit. Para almacenar una gran cantidad de bits, se recurre al uso de memorias. Una memoria, en
Guía resumida para utilizar el microcontrolador CY7C68013
 Guía resumida para utilizar el microcontrolador CY7C68013 Camilo Quintáns Graña Miguel Ángel Domínguez Gómez Vigo, 2011 Índice 1. DESCRIPCIÓN DEL HARDWARE... 3 1.1. Introducción... 3 1.2. Recursos de memoria...
Guía resumida para utilizar el microcontrolador CY7C68013 Camilo Quintáns Graña Miguel Ángel Domínguez Gómez Vigo, 2011 Índice 1. DESCRIPCIÓN DEL HARDWARE... 3 1.1. Introducción... 3 1.2. Recursos de memoria...
Tener la WiFi abierta implica tener nuestra conexión a Internet compartida, además de otros riesgos:
 Protege tu WiFi Qué riesgos hay en que alguien utilice nuestra WiFi? Tener la WiFi abierta implica tener nuestra conexión a Internet compartida, además de otros riesgos: Reducción del ancho de banda. Dependiendo
Protege tu WiFi Qué riesgos hay en que alguien utilice nuestra WiFi? Tener la WiFi abierta implica tener nuestra conexión a Internet compartida, además de otros riesgos: Reducción del ancho de banda. Dependiendo
Adopción SÍ NO PRÁCTICA. 1.- Del funcionamiento del Directorio.
 1.- Del funcionamiento del Directorio. A. De la adecuada y oportuna información del Directorio, acerca de los negocios y riesgos de la sociedad, así como de sus principales políticas, controles y procedimientos.
1.- Del funcionamiento del Directorio. A. De la adecuada y oportuna información del Directorio, acerca de los negocios y riesgos de la sociedad, así como de sus principales políticas, controles y procedimientos.
Manual de usuario del Directorio Activo
 Manual de usuario del Directorio Activo Arranque e inicio de la sesión La imágenes que se muestran en el proceso de arranque de un ordenador dado de alta en el Directorio Activo, cuando carga el sistema
Manual de usuario del Directorio Activo Arranque e inicio de la sesión La imágenes que se muestran en el proceso de arranque de un ordenador dado de alta en el Directorio Activo, cuando carga el sistema
18. Camino de datos y unidad de control
 Oliverio J. Santana Jaria Sistemas Digitales Ingeniería Técnica en Informática de Sistemas Curso 2006 2007 18. Camino de datos y unidad de control Un La versatilidad una característica deseable los Los
Oliverio J. Santana Jaria Sistemas Digitales Ingeniería Técnica en Informática de Sistemas Curso 2006 2007 18. Camino de datos y unidad de control Un La versatilidad una característica deseable los Los
INVENTARIO INTRODUCCIÓN RESUMEN DE PASOS
 INVENTARIO INTRODUCCIÓN Es habitual que en las empresas realicen a final de año un Inventario. Con este proceso se pretende controlar el nivel de stock existente, para iniciar el nuevo ejercicio, conociendo
INVENTARIO INTRODUCCIÓN Es habitual que en las empresas realicen a final de año un Inventario. Con este proceso se pretende controlar el nivel de stock existente, para iniciar el nuevo ejercicio, conociendo
Alarma 3G por teléfono móvil
 Alarma 3G por teléfono móvil Índice A.Descripción... 3 B.El esquema... 4 C.La placa... 7 D.El programa... 8 E.Conclusiones finales... 13 Francisco Aguilar Segura Alarma 3G A. Descripción Este proyecto
Alarma 3G por teléfono móvil Índice A.Descripción... 3 B.El esquema... 4 C.La placa... 7 D.El programa... 8 E.Conclusiones finales... 13 Francisco Aguilar Segura Alarma 3G A. Descripción Este proyecto
GESTIÓN Y CONTROL DEL DESARROLLO E IMPLANTACIÓN DE APLICACIONES
 Ciclo Formativo: Módulo: Desarrollo de Aplicaciones Informáticas Análisis y Diseño Detallado de Aplicaciones Informáticas de Gestión Unidad de Trabajo 10: GESTIÓN Y CONTROL DEL DESARROLLO E IMPLANTACIÓN
Ciclo Formativo: Módulo: Desarrollo de Aplicaciones Informáticas Análisis y Diseño Detallado de Aplicaciones Informáticas de Gestión Unidad de Trabajo 10: GESTIÓN Y CONTROL DEL DESARROLLO E IMPLANTACIÓN
PRACTICA #1. Aprender a programar una interrupción software empleando C y/o Ensamblador.
 PRACTICA #1 Aprender a programar una interrupción software empleando C y/o Ensamblador. Aprender a manipular dispositivos externos (8253, 8255) desde C y/o ensamblador. PROCEDIMIENTO: Vamos a programar
PRACTICA #1 Aprender a programar una interrupción software empleando C y/o Ensamblador. Aprender a manipular dispositivos externos (8253, 8255) desde C y/o ensamblador. PROCEDIMIENTO: Vamos a programar
Twido Twido Windows Executive Loader Wizard Ayuda en pantalla. spa Versión 3.2
 Twido Twido Windows Executive Loader Wizard Ayuda en pantalla spa Versión 3.2 2 Tabla de materias Acerca de este libro................................... 5 Capítulo 1 Utilización de Twido Executive Loader
Twido Twido Windows Executive Loader Wizard Ayuda en pantalla spa Versión 3.2 2 Tabla de materias Acerca de este libro................................... 5 Capítulo 1 Utilización de Twido Executive Loader
Contenido. MANUAL DE USO E INSTALACIÓN DLC Detector de línea cortada Página 1 de 13
 DLC Detector de línea cortada Página 1 de 13 Contenido 1 Introducción DLC... 2 2 Funcionamiento... 2 3 Instalación... 3 4 Combinando con Reductores de flujo... 3 5 Mantenimiento... 5 6 Configuración Alarmas
DLC Detector de línea cortada Página 1 de 13 Contenido 1 Introducción DLC... 2 2 Funcionamiento... 2 3 Instalación... 3 4 Combinando con Reductores de flujo... 3 5 Mantenimiento... 5 6 Configuración Alarmas
Manual Time One Software control de horarios
 Manual Time One Software control de horarios C/ Salva 63, 3º, 1ª 08004 Barcelona ( España ) Telf.: 93 329 34 35 Mail: info@bioclave.com Web: www.bioclave.com Índice 1 - Instalación.....3 2 - Guía inicio
Manual Time One Software control de horarios C/ Salva 63, 3º, 1ª 08004 Barcelona ( España ) Telf.: 93 329 34 35 Mail: info@bioclave.com Web: www.bioclave.com Índice 1 - Instalación.....3 2 - Guía inicio
MODO DE EMPLEO. TechGrow AM-1 DETECTOR DE ALARMAS detector de alarmas inalámbrico para seguridad, vigilancia e información remota WWW.TECHGROW.
 WWW.TECHGROW.NL TechGrow AM-1 DETECTOR DE ALARMAS detector de alarmas inalámbrico para seguridad, vigilancia e información remota Version de software: 1.00 Publicidad: 01-11-2014 MODO DE EMPLEO TechGrow
WWW.TECHGROW.NL TechGrow AM-1 DETECTOR DE ALARMAS detector de alarmas inalámbrico para seguridad, vigilancia e información remota Version de software: 1.00 Publicidad: 01-11-2014 MODO DE EMPLEO TechGrow
5.8. REGISTRO DE FACTURAS.
 5.8. REGISTRO DE FACTURAS. Una factura es un documento probatorio de la realización de una operación económica que especifica cantidades, concepto, precio y demás condiciones de la operación. Este módulo
5.8. REGISTRO DE FACTURAS. Una factura es un documento probatorio de la realización de una operación económica que especifica cantidades, concepto, precio y demás condiciones de la operación. Este módulo
Antes de utilizar este servicio, lea detenidamente este manual y téngalo a mano para consultarlo más adelante.
 Instrucciones de uso Antes de utilizar este servicio, lea detenidamente este manual y téngalo a mano para consultarlo más adelante. SEGÚN PERMITAN LAS LEYES APLICABLES: EL PROVEEDOR NO ASUME RESPONSABILIDAD
Instrucciones de uso Antes de utilizar este servicio, lea detenidamente este manual y téngalo a mano para consultarlo más adelante. SEGÚN PERMITAN LAS LEYES APLICABLES: EL PROVEEDOR NO ASUME RESPONSABILIDAD
Manual de Usuario "IDEC"
 Manual de Usuario "IDEC" Página 1 de 7 Tabla de Contenidos 1. Historial de versiones... 3 2. Objetivo... 3 3. Alcance... 3 4. Aprobaciones... 3 5. Introducción... 3 5.1. Descripción del producto... 3 5.2.
Manual de Usuario "IDEC" Página 1 de 7 Tabla de Contenidos 1. Historial de versiones... 3 2. Objetivo... 3 3. Alcance... 3 4. Aprobaciones... 3 5. Introducción... 3 5.1. Descripción del producto... 3 5.2.
Posibilidad de varios periféricos operando mediante interrupciones.
 Posibilidad de varios periféricos operando mediante interrupciones. Juan Zamorano Flores 1 Introducción. En clases previas se ha presentado el mecanismo básico de las interrupciones. Se ha definido cómo
Posibilidad de varios periféricos operando mediante interrupciones. Juan Zamorano Flores 1 Introducción. En clases previas se ha presentado el mecanismo básico de las interrupciones. Se ha definido cómo
Contenido TEMA 2 ENTRADA / SALIDA. Interfaz HW: buses del sistema. Interfaz HW de E/S
 Contenido TEMA ENTRADA / SALIDA Sergio Romero Montiel Depto Arquitectura de Computadores El concepto de interfaz de E/S Direccionamiento de interfaces de E/S Mapa de memoria Organización Mapeada y no mapeada
Contenido TEMA ENTRADA / SALIDA Sergio Romero Montiel Depto Arquitectura de Computadores El concepto de interfaz de E/S Direccionamiento de interfaces de E/S Mapa de memoria Organización Mapeada y no mapeada
Tema 2: Programación de PLCs
 ema 2: Programación de PLCs 1. SEP 7 2. PROGRAMACIÓN BÁSICA AWL Introducción Operaciones lógicas a nivel de bit Marcas Simbólicos Flancos emporizadores Diagnosis e información del sistema Contadores Carga
ema 2: Programación de PLCs 1. SEP 7 2. PROGRAMACIÓN BÁSICA AWL Introducción Operaciones lógicas a nivel de bit Marcas Simbólicos Flancos emporizadores Diagnosis e información del sistema Contadores Carga
SISTEMA InfoSGA Manual de Actualización Mensajeros Radio Worldwide C.A Código Postal 1060
 SISTEMA InfoSGA Manual de Actualización Mensajeros Radio Worldwide C.A Código Postal 1060 Elaborado por: Departamento de Informática Febrero 2012 SISTEMA InfoSGA _ Manual de Actualización 16/02/2012 ÍNDICE
SISTEMA InfoSGA Manual de Actualización Mensajeros Radio Worldwide C.A Código Postal 1060 Elaborado por: Departamento de Informática Febrero 2012 SISTEMA InfoSGA _ Manual de Actualización 16/02/2012 ÍNDICE