AUTOMOCIÓN MOTORES TÉRMICOS Y SUS SISTEMAS AUXILIARES MECÁNICA DE LOS MOTORES ALTERNOS
|
|
|
- María Victoria Casado Zúñiga
- hace 7 años
- Vistas:
Transcripción

1
2 FUNCIONAMIENTO DEL MOTOR MULTICILINDRICO...01 DIAGRAMA DEL PAR MOTRIZ...01 DESFASE UNIFORME DE LOS CICLOS...02 ORDEN DE ENCENDIDO...04 MOTORES BICILÍNDRICOS...04 MOTOR DE CUATRO CILINDROS EN LÍNEA...05 MOTOR DE SEIS CILINDROS EN LÍNEA...06 TRANSFORMACION DEL MOVIMIENTO ALTERNO EN ROTATORIO...07 CADENA CINEMÁTICA BIELA-MANIVELA...07 DIVISIÓN DE LAS MASAS...10 MASAS ALTERNAS...10 MASAS ROTANTES...11 EQUILIBRADO DE LAS PARTES ROTANTES...12 EQUILIBRADO DE LAS FUERZAS CENTRÍFUGAS...14 EQUILIBRADO ESTÁTICO...14 EQUILIBRADO DINÁMICO...14 EQUILIBRADO DE LAS FUERZAS ALTERNAS DE INERCIA...18 VOLANTE...23 VIBRACIONES CON TORSIÓN Y FLEXIÓN...24
3 FUNCIONAMIENTO DEL MOTOR MULTICILINDRICO El motor monocilíndrico tiene un funcionamiento irregular porqué en el arco de dos revoluciones (720º) del cigüeñal hay una fase útil de sólo 180º. Se utilizan varios cilindros para regular el funcionamiento del motor y obtener: -Un par motriz más regular. -Un mejor equilibrado del motor con menos vibraciones. -Una carga más uniforme en los cojinetes. DIAGRAMA DEL PAR MOTRIZ La fuerza del pistón, suma de la fuerza alterna de inercia y de la fuerza de la presión de los gases, desarrolla un par motriz en el cigüeñal variable en cada instante de funcionamiento. El funcionamiento de este par en el arco de dos revoluciones del motor es muy irregular, ya que el valor máximo es mucho más grande del valor medio; esto supone un funcionamiento desigual del motor. Se denomina grado de irregularidad de un motor la relación entre el valor máximo y el medio del par motriz. Diagrama del par motriz de un solo cilindro 01
4 Con los motores multicilíndricos, el funcionamiento del motor es más regular y también su par motriz, ya que se reduce el grado de irregularidad. La tabla siguiente nos indica el grado de irregularidad de los motores con distintos número de cilindros. DESFASE UNIFORME DE LOS CICLOS Nº de cilindros Grado de irregularidad 1 cilindro 10,30 2 cilindros 4,45 4 cilindros 2,95 5 cilindros 2,33 6 cilindros 1,65 8 cilindros 1,49 Grado de irregularidad para distintos números de cilindros En los motores multicilíndricos, para regular el par motriz y para que el movimiento del cigüeñal sea más uniforme, el ciclo de los cilindros es uniforme; esto se consigue situando las manivelas del cigüeñal desfasadas con el mismo ángulo, según la siguiente regla: Desfase = 720º / número de los cilindros En los motores de cuatro tiempos, y Desfase = 360º / número de los cilindros En los motores de dos tiempos. Esta regla vale tanto para motores con cilindros en línea como para motores con cilindros en V, que forman entre ellos un ángulo igual al desfase o un múltiplo suyo; por ejemplo un motor de 6 cilindros tendrá un desfase de 120º y podrá tener cilindros en V a 120º mientras un motor de 12 cilindros tendrá un desfase de 60º y con cilindros en V a 60º, 120º ó 180º. El desfase uniforme de los ciclos de trabajo no es el único sistema para determinar la posición de las manivelas. De hecho, en algunos casos, razones de equilibrado del cigüeñal pueden ser prioritarias respecto a las anteriores; en este caso se acepta un desfase no uniforme de los ciclos de trabajo. 02
5 El dibujo representa el par motriz para motores con diferente número de cilindros, donde el desfase de los ciclos es uniforme, menos en una de las posibles disposiciones del motor bicilíndrico (A: motor de dos cilindros en línea con manivelas desfasadas de 180º). A. 2 cilindros en línea (manivelas a 180º). B. 2 cilindros contrapuestos o 2 cilindros en línea (manivelas a 360º). C. 4 cilindros en línea. D. 5 cilindros en línea. E. 6 cilindros en línea o 6 cilindros en V a 120º (manivelas a 120º). F. 8 cilindros en línea u 8 cilindros en V a 90º (manivelas a 90º). Diagramas del par motriz para motores con diferente número de cilindros 03
6 ORDEN DE ENCENDIDO La exigencia de obtener un par motriz con una sucesión de los ciclos de trabajo lo más uniforme posible, y la necesidad de equilibrar el cigüeñal sin añadir contrapesos, obligan a seguir un determinado orden de encendido. Ya que para un motor de cuatro tiempos con un determinado número de cilindros hay varias secuencias de encendido, es necesario elegir la que más convenga en base a dos hechos muy importantes: -Obtener la máxima uniformidad de carga en los cojinetes de bancada y que no se enciendan dos cilindros adyacentes. -Que las admisiones de los cilindros alimentados con un colector común no se obstaculicen entre ellas llenando irregularmente algunos de los cilindros. MOTORES BICILÍNDRICOS En los motores bicilíndricos el orden de encendido es evidente: 1-2 En estos motores, si el ciclo es de cuatro tiempos y los cilindros en línea, existen dos casos. Si las manivelas están separadas de 360º, según un orden muchas veces empleado en los vehículos, la sucesión de las explosiones es regular pero, desde el punto de vista del equilibrado, el motor se parece a un monocilíndrico. Desfase ciclos de trabajo: 720º/2 = 360º Sucesión de las fases de un motor de dos cilindros en línea con manivelas a 360º 04
7 Si las manivelas están separadas de 180º, la sucesión del encendido es desfavorable, ya que se obtienen dos encendidos a 180º entre ellos, y un arco de 540º sin fases útiles, aunque el motor está más equilibrado. Esta disposición de las manivelas es óptima también en la sucesión de los encendidos si los cilindros se sitúan a 180º entre ellos (ubicación típica de los motores bicilíndricos contrapuestos). MOTOR DE CUATRO CILINDROS EN LÍNEA En los motores de cuatro cilindros en línea es imposible evitar la sucesión de encendidos en dos cilindros cercanos y por lo tanto se usan indiferentemente dos secuencias de encendido: ó La primera es la que se usa normalmente, aunque no tenga ninguna ventaja con respecto a la segunda. Desfase ciclos de trabajo: 720º/4 = 180º Ubicación de las manivelas y sucesión de las fases en un motor de cuatro cilindros en línea 05
8 MOTOR DE SEIS CILINDROS EN LÍNEA En un motor de seis cilindros en línea, observamos que empezando por el pistón nº 1, después de una rotación de 120º hacia la derecha del cigüeñal, los pistones nº 2 y 5 se encuentran simultáneamente en el P.M.S. Luego al encenderse el cilindro nº 1 puede suceder lo mismo indiferentemente en los cilindros nº 2 ó 5. Si elegimos el nº 5 evitamos que el encendido se produzca en dos cilindros adyacentes, como son el nº 1 y el nº 2. Del mismo modo podemos elegir entre los cilindros nº 3 y 4 con las dos manivelas centrales. En un motor de seis cilindros en línea, el orden de encendido mejor y el que se usa normalmente es el siguiente: Desfase ciclos de trabajo: 720º/6 = 120º Ubicación de las manivelas y sucesión de las fases de un motor de seis cilindros en línea con orden de encendido
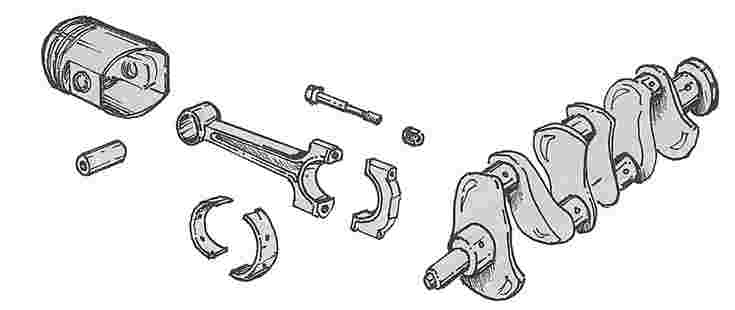
9 TRANSFORMACION DEL MOVIMIENTO ALTERNO EN ROTATORIO El movimiento alterno del pistón se transforma en movimiento rotatorio del cigüeñal con el sistema biela-manivela. CADENA CINEMÁTICA BIELA-MANIVELA El pie de biela, conectado al pistón mediante el bulón, se mueve con un movimiento rectilíneo alterno, mientras la cabeza de biela, unida al cigüeñal mediante el perno de manivela, se mueve con movimiento rotatorio uniforme. 07
10 l = Longitud biela. r = Radio manivela. c = 2r = carrera pistón. x = Desplazamiento pistón. Cadena cinemática biela-manivela Analizando el movimiento resulta que, si la velocidad de rotación del perno de manivela es uniforme, el pistón se mueve según una ley matemática muy compleja, función de variosparámetros geométricos del movimiento. La velocidad del pistón es máxima aproximadamente en correspondencia del punto en el que la biela y manivela forman un ángulo recto. 08
11 Al variar la velocidad del pistón y de las masas unidas al mismo, se originan aceleraciones con inercia. Estas fuerzas se calculan sobre la base de la relación: Fa = - maa Donde: Fa = fuerza de inercia alterna. ma = masas alternas. a = aceleración de la masa. Por otra parte, la rotación del perno de manivela y de las masas unidas al mismo, implica la existencia de fuerzas centrífugas que se calculan sobre la base de la relación: Fc = mrω2r Donde: Fc = fuerza de inercia centrífuga. mr = masas rotantes. r = radio manivela. ω = velocidad angular de la masa. 09
12 DIVISIÓN DE LAS MASAS La cadena cinemática biela-manivela se caracteriza por el hecho de que algunas partes están dotadas de movimiento rectilíneo alterno y otras de movimiento rotatorio; el único órgano dotado de movimiento mixto es la biela. De hecho, el extremo unido al pistón (pie de biela) se mueve alternamente, mientras que el extremo unido al perno manivela del cigüeñal (cabeza de biela) tiene movimiento rotatorio. Para simplificar los cálculos la masa del vástago de biela se divide en dos partes: -Un tercio de su masa se considera concentrada en la cabeza de biela. -Y los otros dos tercios en el pie. MASAS ALTERNAS Están concentradas en el eje del bulón del pistón y dotadas de movimiento rectilíneo alterno, las masas de las siguientes partes: -Pistón completo con dispositivos de estanqueidad. -Bulón pistón y partes cercanas. -Pie de biela y dos tercios del vástago. -Vástago completo y cabeza en cruz (cuando existe, como en el caso de los grandes motores de gasóleo navales o industriales). 10
13 Estas masas, al moverse alternativamente, se aceleran en el eje del cilindro, originando las fuerzas alternas de inercia. MASAS ROTANTES Están concentradas en el eje del perno de manivela y dotadas de movimiento rotatorio, las masas de las siguientes partes: -Cabeza de biela (con sombrerete, cojinete, tornillos, tuercas, etc.) y un tercio del vástago. -Perno de manivela. -Brazos de manivela y eventuales contrapesos. 11
14 EQUILIBRADO DE LAS PARTES ROTANTES En los motores de combustión interna, además de las fuerzas que actúan sobre la cabeza de los pistones, provocadas por los gases en expansión, existen otros tipos de fuerzas. Del análisis del sistema cinemático se deduce que mientras que la velocidad de rotación del cigüeñal es uniforme, la velocidad lineal del pistón varía de un valor cero, en sus puntos muertos, a un valor máximo cuando la muñequilla del cigüeñal y la biela forman un ángulo recto. Las variaciones de velocidad generan aceleraciones que, a su vez, estando asociadas a unas masas dan origen a: -Fuerzas de inercia alternas de 1er ( Fa' ) y 2º ( Fa") orden, originadas por las masas dotadas de movimiento alternativo, es decir: - Pistón completo con bulón y segmentos. - Pie de biela. - Dos tercios del cuerpo de biela. Fuerzas de inercia alternadas 12
15 -Fuerzas de inercia centrífugas ( Fc ) son las originadas por las masas rotantes: - Muñequilla. - Cabeza de biela con el cojinete, los pernos y las tuercas. - Un tercio del cuerpo de la biela. Fuerzas centrífugas Las fuerzas de inercia alternas y las centrífugas (Fa - Fc) de los órganos en movimiento, junto con la presión de los gases, producen en cada cilindro fuerzas y momentos, que actúan en el bloque motor y, a través de los soportes, se transmiten a la estructura de fijación del motor. Estas fuerzas y momentos varían mucho y aunque los soportes y la estructura tienen una cierta elasticidad, el grupo motor puede vibrar. Vibraciones que, resultan dañinas a los órganos internos del motor y a sus soportes exteriores. El equilibrado del motor toma, por tanto, gran importancia para los motores de los automóviles y, en particular, para los de elevadas prestaciones. El equilibrado del motor reduce y, si es posible, elimina estas vibraciones, anulando las causas mismas que las provocan, es decir las fuerzas y momentos aplicadas al motor. 13
16 EQUILIBRADO DE LAS FUERZAS CENTRÍFUGAS Para eliminar estas fuerzas y momentos se procede al equilibrado del cigüeñal. Por esta razón, el equilibrado debe ser tanto estático como dinámico. EQUILIBRADO ESTÁTICO El cigüeñal se equilibra estáticamente cuando su centro de gravedad está en el eje de rotación; en estas condiciones el cigüeñal, dispuesto horizontalmente, entre dos puntas situadas en correspondencia de su eje o en un apoyo de cuchillo, se mantiene quieto en cualquier posición angular. En la mayor parte de los casos, cuando la disposición de las manivelas desfasa uniformemente los ciclos de trabajo, el cigüeñal se equilibra estáticamente, al ser las manivelas simétricas respecto al mismo. Si esto no sucede (motores monocilíndricos o bicilíndricos con manivelas a 360º) se añaden unos oportunos contrapesos. A.Cigüeñal no equilibrado B.Cigüeñal equilibrado con contrapesos EQUILIBRADO DINÁMICO Equilibrado estático El cigüeñal está equilibrado dinámicamente cuando, al girar, las fuerzas centrífugas de las masas en rotación están equilibradas (pares centrífugos). 14
17 El equilibrado dinámico se consigue aplicando una masa en contraposición, de igual magnitud a la masa que provoca el desequilibrio; con esto se eliminan la fuerzas de 1er orden. Estas se generan cuando el pistón se encuentra tanto en el P.M.S. como en el P.M.I. Por ejemplo, en un motor bicilíndrico con manivelas a 180º, el cigüeñal está equilibrado estáticamente pero no dinámicamente, ya que las dos fuerzas centrífugas producen un par transversal (Mc). Mc = Fc x b Mc = Par transversal. Fc = Fuerza centrífuga. b = Brazo de aplicación de la fuerza centrífuga. Cigüeñal de un motor bicilíndrico no equilibrado dinámicamente 15
18 Para equilibrarlo dinámicamente hay que añadir dos oportunos contrapesos, de tal forma que esta fuerza (Me) es igual y contraria a la fuerza centrifuga. Mc = Me Me - Mc = 0 Me = Fc (b/c) x c Mc = Par transversal. Fc (b/c) = Fuerza centrífuga de los contrapesos. b = Brazo de aplicación de la fuerza centrífuga. c = Brazo de aplicación de la fuerza de los contrapesos. Cigüeñal de un motor bicilíndrico equilibrado dinámicamente con contrapesos Con cilindros en línea, la disposición de manivelas a 180º, ofrece ventajas desde el punto de vista del equilibrado pero supone cierta irregularidad en la sucesión de las fases útiles de trabajo. Por esta razón se adopta la solución de manivelas a 360º que supone que el motor se comporte como un monocilíndrico y por lo tanto debe contrapesarse. F = Fuerza de inercia de 1 er orden. Fc = Fuerza centrífuga del contrapeso. F = Componente equilibrante. Fo = Componente que desequilibra (horizontal). Equilibrado de un motor de dos cilindros en línea con manivelas a 360º 16
19 El equilibrado dinámico está determinado no sólo por el cigüeñal en su conjunto, sino también por cada volado (posición del cigüeñal incluida entre dos cojinetes de bancada), para eliminar las cargas en los cojinetes de bancadas producidas por los pares centrífugos de cada volado. En los motores de cuatro cilindros en línea, por ejemplo, el cigüeñal en su conjunto está equilibrado estática y dinámicamente, pero sus dos volados no lo están si se consideran individualmente. Cigüeñal para motor de cuatro cilindros en línea: x-x = eje de simetría Por lo tanto hay que equilibrar dinámicamente cada volado con unos contrapesos. Cigüeñal para motor de cuatro cilindros en línea con volado contrapesado: x-x = eje de simetría 17
20 EQUILIBRADO DE LAS FUERZAS ALTERNAS DE INERCIA Las fuerzas alternas de inercia, descompuestas en dos términos sinusoidales de 1er y de 2º orden, actúan en el cigüeñal de forma variable. Para que su estudio sea más sencillo se sustituye la I' con dos fuerzas I'1 y I'2 de amplitud constante igual a 1/2 maω2r y con rotación igual a la del cigüeñal, una con el sentido de la manivela y la otra con sentido opuesto, para mantenerse en posición simétrica respecto a la I'1, respecto al eje del cilindro. Descomposición de las fuerzas de inercia alternas de 1 er orden En la I" se sustituyen dos fuerzas I"1 y I"2 iguales a 1/2 maω2rcoϕ, que giran una en el mismo sentido de la manivela, pero con el doble de velocidad para formar siempre con el eje del cilindro un ángulo doble del que forma la manivela, y la otra simétricamente en sentido opuesto. 18
21 Descomposición de las fuerzas de inercia alternas de 2º orden Ahora podemos estudiar separadamente el equilibrado de cada uno de los cuatro sistemas de fuerzas I'1, I'2, I"1,I" 2. Respecto al equilibrado de las fuerzas de 1er orden, que giran a la misma velocidad del cigüeñal, podemos establecer un razonamiento parecido al de las fuerzas centrífugas. Por consiguiente, en los motores multicilíndricos, las fuerzas alternas de 1er orden se equilibran: -Si el cigüeñal está equilibrado estáticamente. -Para los motores mono o bicilíndricos hay que contrapesar el cigüeñal para equilibrar las fuerzas centrífugas y las fuerzas I'1 (giran con el mismo sentido del cigüeñal). Para equilibrar las I'2, que giran en sentido opuesto, hay que: -Poner unos contrapesos en un eje auxiliar, que gire a la misma velocidad pero en sentido opuesto respecto al cigüeñal. 19
22 Las fuerzas de 2º orden, que giran con doble velocidad respecto al cigüeñal, se equilibran más o menos según el número y disposición de los cilindros; por ejemplo: -En un motor de seis cilindros en línea, las fuerzas alternas de 2º orden y el par generado por las mismas están en equilibrio. -En un cuatro cilindros las fuerzas alternas en cambio están todas alineadas con el mismo sentido y se suman. Fuerzas de inercia alternas de 2º orden para un cuatro tiempos con cuatro cilindros en línea Hay que tener en cuenta que tanto las fuerzas de 2º orden como los eventuales pares generados por las mismas no se equilibran aunque se coloquen contrapesos en el cigüeñal. Para equilibrar los motores de cuatro cilindros en línea de grandes dimensiones, donde las fuerzas producen vibraciones más fuertes, se montan dos ejes de equilibrado, que giran, uno en sentido opuesto al otro, con el doble de velocidad del cigüeñal, y están dotados de masas excéntricas oportunamente colocadas. 20
23 I = Fuerzas alternas de 1 er orden II = Fuerzas alternas de 2º orden 21
24 Equilibrado de las fuerzas alternas de 2º orden con dos ejes contrarrotantes 22
25 VOLANTE Para reducir el grado de irregularidad, en un extremo del cigüeñal se monta un volante. Se trata de un dispositivo que almacena la energía durante los picos máximos del par motriz, para utilizarla cuando el par disminuye. El volante se dimensiona en base al tipo de uso del motor. En los motores de competición no existe volante, ya que en estas aplicaciones prima la capacidad de aceleración del motor. En los motores para vehículos de clase alta, el volante tiene mucha inercia para reducir el grado de irregularidad y que el motor funcione mejor. Volante del motor 23
26 VIBRACIONES CON TORSIÓN Y FLEXIÓN El cigüeñal, durante el funcionamiento del motor, se torsiona y flexiona simultáneamente. En cuanto a las oscilaciones con torsión, cada cigüeñal tiene una serie de frecuencias propias de oscilación, que depende del diseño de sus partes y del material de construcción. Estas frecuencias propias representan como oscila torsionalmente el cigüeñal cuando se precarga con un par de torsión y después oscila libremente. Sus diferentes partes giran alternativamente las unas respecto a las otras, pasando de una posición extrema a la opuesta cíclicamente, con un movimiento que se amortigua poco a poco. Si la frecuencia de rotación del motor (régimen revoluciones) coincide con la frecuencia de oscilación con torsión propia del cigüeñal, se produce la resonancia; esto, incrementando la torsión relativa de las varias partes del cigüeñal, puede llegar a romperlo. La solución es adoptar un amortiguador de torsión (dumper), que absorbe la energía de torsión para que ésta no afecte al cigüeñal. Los amortiguadores más utilizados son de tipo volante, unidos al cigüeñal mediante una junta de goma, o interponiendo un medio viscoso. Amortiguador de torsión (dumper) 24
27 Para las oscilaciones con flexión, el problema es parecido, pero son más importantes las fuerzas, no el par, aplicadas al cigüeñal, y las relativas flexiones. Estas oscilaciones no son tan importantes como las anteriores, ya que se adoptan cigüeñales con muchos soportes de bancada, reduciendo la longitud de cada volado, lo que incrementa la rigidez. Por consiguiente, además de reducir la flexión con la misma fuerza aplicada, se han elevado los valores de las frecuencias propias. 25
AUTOMOCIÓN MOTORES TÉRMICOS Y SUS SISTEMAS AUXILIARES RELACIÓN DE COMPRESIÓN CILINDRADA
 RELACIÓN DE COMPRESIÓN PARÁMETROS CARACTERÍSTICOS...01...02 RELACIÓN DE COMPRESIÓN...05 RELACIÓN CARRERA / DIÁMETRO...06 MOTORES CUADRADOS...06 MOTORES SUPERCUADRADOS O DE CARRERA CORTA...07 VENTAJAS DE
RELACIÓN DE COMPRESIÓN PARÁMETROS CARACTERÍSTICOS...01...02 RELACIÓN DE COMPRESIÓN...05 RELACIÓN CARRERA / DIÁMETRO...06 MOTORES CUADRADOS...06 MOTORES SUPERCUADRADOS O DE CARRERA CORTA...07 VENTAJAS DE
1. Palanca 2. Poleas: Polea simple o fija Polea móvil Polipastos
 1. Palanca 2. Poleas: Polea simple o fija Polea móvil Polipastos Una palanca es una máquina constituida por una barra simple que puede girar en torno a un punto de apoyo o fulcro. Según donde se aplique
1. Palanca 2. Poleas: Polea simple o fija Polea móvil Polipastos Una palanca es una máquina constituida por una barra simple que puede girar en torno a un punto de apoyo o fulcro. Según donde se aplique
En general un cuerpo puede tener dos tipos distintos de movimiento simultáneamente.
 TORQUE Y EQUILIBRIO DE CUERPO RÍGIDO. En general un cuerpo puede tener dos tipos distintos de movimiento simultáneamente. De traslación a lo largo de una trayectoria, de rotación mientras se está trasladando,
TORQUE Y EQUILIBRIO DE CUERPO RÍGIDO. En general un cuerpo puede tener dos tipos distintos de movimiento simultáneamente. De traslación a lo largo de una trayectoria, de rotación mientras se está trasladando,
TEMA 3.- CINEMÁTICA Y DINÁMICA DEL MOTOR
 TEMA.- CINEMÁTICA Y DINÁMICA DEL MOTOR 5 ..- Calcular la oblicuidad de la biela en grados, el deslizamiento, la aceleración, la velocidad instantánea y media del pistón para una posición angular de la
TEMA.- CINEMÁTICA Y DINÁMICA DEL MOTOR 5 ..- Calcular la oblicuidad de la biela en grados, el deslizamiento, la aceleración, la velocidad instantánea y media del pistón para una posición angular de la
Clasificación de los mecanismos.
 MECANISMOS - II MECANISMOS. Son elementos destinados a trasmitir y transformar fuerzas y movimientos desde un elemento motriz (motor) a un elemento receptor. Permiten al ser humano realizar determinados
MECANISMOS - II MECANISMOS. Son elementos destinados a trasmitir y transformar fuerzas y movimientos desde un elemento motriz (motor) a un elemento receptor. Permiten al ser humano realizar determinados
ESTRUCTURAS SIMETRICAS
 ESTRUCTURAS SIMETRICAS Las estructuras reales presentan con mucha frecuencia diseños que tienen la característica de ser simétricas con relación a algún plano, como por ejemplo las estructuras de muchos
ESTRUCTURAS SIMETRICAS Las estructuras reales presentan con mucha frecuencia diseños que tienen la característica de ser simétricas con relación a algún plano, como por ejemplo las estructuras de muchos
CONCEPTO DE CINEMÁTICA: es el estudio del movimiento sin atender a las causas que lo producen
 CINEMÁTICA CONCEPTO DE CINEMÁTICA: es el estudio del movimiento sin atender a las causas que lo producen CONCEPTO DE MOVIMIENTO: el movimiento es el cambio de posición, de un cuerpo, con el tiempo (este
CINEMÁTICA CONCEPTO DE CINEMÁTICA: es el estudio del movimiento sin atender a las causas que lo producen CONCEPTO DE MOVIMIENTO: el movimiento es el cambio de posición, de un cuerpo, con el tiempo (este
Trabajo Práctico 2 SISTEMAS DE 2 GRADOS DE LIBERTAD PRIMERA PARTE: APLICACIÓN DE LAS ECUACIONES DE LAGRANGE
 PRIMERA PARTE: APLICACIÓN DE LAS ECUACIONES DE LAGRANGE Problema 1. El sistema de la figura está constituido por un cilindro circular de masa m y radio r que rueda sin deslizar dentro de la superficie
PRIMERA PARTE: APLICACIÓN DE LAS ECUACIONES DE LAGRANGE Problema 1. El sistema de la figura está constituido por un cilindro circular de masa m y radio r que rueda sin deslizar dentro de la superficie
UNIVERSIDAD NACIONAL DE EDUCACIÓN A DISTANCIA
 UNIVERSIDAD NACIONAL DE EDUCACIÓN A DISTANCIA NOMBRE... APELLIDOS... CALLE... POBLACIÓN... PROVINCIA... C. P.... SISTEMAS MECÁNICOS E.T.S. de Ingenieros Industriales PRUEBA DE EVALUACIÓN A DISTANCIA /
UNIVERSIDAD NACIONAL DE EDUCACIÓN A DISTANCIA NOMBRE... APELLIDOS... CALLE... POBLACIÓN... PROVINCIA... C. P.... SISTEMAS MECÁNICOS E.T.S. de Ingenieros Industriales PRUEBA DE EVALUACIÓN A DISTANCIA /
Examen de TEORIA DE MAQUINAS Diciembre 12 Nombre...
 Examen de TEORIA DE MAQUINAS Diciembre 12 Nombre... El mecanismo de la figura es un cuadrilátero articulado manivela-balancín. La distancia entre los puntos fijos A y D es 4L/ 3. En la mitad del balancín
Examen de TEORIA DE MAQUINAS Diciembre 12 Nombre... El mecanismo de la figura es un cuadrilátero articulado manivela-balancín. La distancia entre los puntos fijos A y D es 4L/ 3. En la mitad del balancín
Est s á t t á i t c i a E s e l e es e t s ud u i d o o de d e las a s fue u r e zas a s en e equilibrio.
 Estática Es el estudio de las fuerzas en equilibrio. FUERZAS REPRESENTACIÓN GRÁFICA DE LAS FUERZAS Para que una fuerza quede determinada debemos conocer: Su recta de acción o directriz. Su intensidad.
Estática Es el estudio de las fuerzas en equilibrio. FUERZAS REPRESENTACIÓN GRÁFICA DE LAS FUERZAS Para que una fuerza quede determinada debemos conocer: Su recta de acción o directriz. Su intensidad.
Academia Local de Física. Ing. Rafael A. Sánchez Rodríguez
 1 2 3 4 5 6 7 8 9 10 Preguntas de repaso 1) 10.1. Explique por medio de diagramas por qué se dirige hacia el centro la aceleración de un cuerpo que se mueve en círculos a rapidez constante. 2) 10.2. Un
1 2 3 4 5 6 7 8 9 10 Preguntas de repaso 1) 10.1. Explique por medio de diagramas por qué se dirige hacia el centro la aceleración de un cuerpo que se mueve en círculos a rapidez constante. 2) 10.2. Un
QUÉ SON LOS MECANISMOS?
 QUÉ SON LOS MECANISMOS? Son elementos destinados a trasmitir y transformar fuerzas y movimientos desde un elemento motriz (motor) aun elemento receptor. Permiten realizar determinados trabajos con mayor
QUÉ SON LOS MECANISMOS? Son elementos destinados a trasmitir y transformar fuerzas y movimientos desde un elemento motriz (motor) aun elemento receptor. Permiten realizar determinados trabajos con mayor
DEPARTAMENTO DE TECNOLOGIA IES ANTONIO SEQUEROS TEMA 3: MECANISMOS
 TEMA 3: MECANISMOS 1. Mecanismos a. Movimiento circular en movimiento circular Ruedas de fricción Polea correa Engranajes b. Movimiento circular en movimiento lineal y viceversa Biela manivela Piñón cremallera
TEMA 3: MECANISMOS 1. Mecanismos a. Movimiento circular en movimiento circular Ruedas de fricción Polea correa Engranajes b. Movimiento circular en movimiento lineal y viceversa Biela manivela Piñón cremallera
2 o Bachillerato. Conceptos básicos
 Física 2 o Bachillerato Conceptos básicos Movimiento. Cambio de posición de un cuerpo respecto de un punto que se toma como referencia. Cinemática. Parte de la Física que estudia el movimiento de los cuerpos
Física 2 o Bachillerato Conceptos básicos Movimiento. Cambio de posición de un cuerpo respecto de un punto que se toma como referencia. Cinemática. Parte de la Física que estudia el movimiento de los cuerpos
Cinemática: parte de la Física que estudia el movimiento de los cuerpos.
 CINEMÁTICA Cinemática: parte de la Física que estudia el movimiento de los cuerpos. Movimiento: cambio de posición de un cuerpo respecto de un punto de referencia que se supone fijo. Objetivo del estudio
CINEMÁTICA Cinemática: parte de la Física que estudia el movimiento de los cuerpos. Movimiento: cambio de posición de un cuerpo respecto de un punto de referencia que se supone fijo. Objetivo del estudio
MECANISMOS Y MÁQUINAS SIMPLES
 MECANISMOS Y MÁQUINAS SIMPLES Los mecanismos y máquinas simples son dispositivos que se utilizan para reducir la cantidad de esfuerzo necesario para realizar diversas actividades o para transmitir y /
MECANISMOS Y MÁQUINAS SIMPLES Los mecanismos y máquinas simples son dispositivos que se utilizan para reducir la cantidad de esfuerzo necesario para realizar diversas actividades o para transmitir y /
Examen de TEORIA DE MAQUINAS Junio 07 Nombre...
 Examen de TEORIA DE MAQUINAS Junio 07 Nombre... La figura muestra un mecanismo biela-manivela. La manivela posee masa m y longitud L, la biela masa 3 m y longitud 3 L, y el bloque masa 2m. En la posición
Examen de TEORIA DE MAQUINAS Junio 07 Nombre... La figura muestra un mecanismo biela-manivela. La manivela posee masa m y longitud L, la biela masa 3 m y longitud 3 L, y el bloque masa 2m. En la posición
PROGRAMA DE CÁLCULO DE COJINETES
 PROGRAMA DE CÁLCULO DE COJINETES INTRODUCCIÓN Cojinetes de Fricción ha desarrollado un programa informático específico para el cálculo de cojinetes. Este programa permite el cálculo del comportamiento
PROGRAMA DE CÁLCULO DE COJINETES INTRODUCCIÓN Cojinetes de Fricción ha desarrollado un programa informático específico para el cálculo de cojinetes. Este programa permite el cálculo del comportamiento
Figura 1. Mecanismo biela-manivela del motor de explosión
 El Par, la Potencia y el consumo de un Motor. El Par o Torque: En un motor, la combustión de la mezcla encerrada en el cilindro produce un aumento de presión y temperatura dentro del mismo. Este aumento
El Par, la Potencia y el consumo de un Motor. El Par o Torque: En un motor, la combustión de la mezcla encerrada en el cilindro produce un aumento de presión y temperatura dentro del mismo. Este aumento
BLOQUE 2. OPERADORES MECÁNICOS
 BLOQUE 2. OPERADORES MECÁNICOS 1. INTRODUCCIÓN Hay muchas maneras de definir una máquina. Nosotros vamos a usar la siguiente definición: Máquina: es el conjunto de mecanismos (operadores mecánicos) capaz
BLOQUE 2. OPERADORES MECÁNICOS 1. INTRODUCCIÓN Hay muchas maneras de definir una máquina. Nosotros vamos a usar la siguiente definición: Máquina: es el conjunto de mecanismos (operadores mecánicos) capaz
0.- INTRODUCCIÓN. Fuerza y movimiento obtenidos en el elemento RECEPTOR. Fuerza y movimiento proporcionado por el elemento MOTRIZ MECANISMO
 0.- INTRODUCCIÓN. En general, todas las máquinas se componen de mecanismos; gracias a ellos, el impulso que proviene del esfuerzo muscular o de un motor se traduce en el tipo de movimiento y la fuerza
0.- INTRODUCCIÓN. En general, todas las máquinas se componen de mecanismos; gracias a ellos, el impulso que proviene del esfuerzo muscular o de un motor se traduce en el tipo de movimiento y la fuerza
2º E.S.O. INDICE 1. QUE SON LOS MECANISMOS 2. CLASIFICACION DE LOS MECANISMOS 2.1. MECANISMOS DE TRASMISION DE MOVIMIENTO
 1. QUE SON LOS MECANISMOS INDICE 2. CLASIFICACION DE LOS MECANISMOS 2.1. MECANISMOS DE TRASMISION DE MOVIMIENTO 2.2 MECANISMOS DE TRANSFORMACION DE MOVIMIENTO 2º E.S.O. TECNOLOGÍA - 2º ESO TEMA 5: LOS
1. QUE SON LOS MECANISMOS INDICE 2. CLASIFICACION DE LOS MECANISMOS 2.1. MECANISMOS DE TRASMISION DE MOVIMIENTO 2.2 MECANISMOS DE TRANSFORMACION DE MOVIMIENTO 2º E.S.O. TECNOLOGÍA - 2º ESO TEMA 5: LOS
Movimiento armónico. Péndulos físico y de torsión.
 Movimiento armónico. Péndulos físico y de torsión. Objetivo eterminar el radio de giro de un péndulo físico y la aceleración de la gravedad. eterminar el módulo de rigidez de un hilo metálico mediante
Movimiento armónico. Péndulos físico y de torsión. Objetivo eterminar el radio de giro de un péndulo físico y la aceleración de la gravedad. eterminar el módulo de rigidez de un hilo metálico mediante
ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL FACULTAD DE CIENCIAS NATURALES Y MATEMÁTICAS DEPARTAMENTO DE FÍSICA
 ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL FACULTAD DE CIENCIAS NATURALES Y MATEMÁTICAS DEPARTAMENTO DE FÍSICA SEGUNDA EVALUACIÓN DE FÍSICA A SEPTIEMBRE 3 DE 2014 SOLUCIÓN Pregunta 1 (2 puntos) Un grifo
ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL FACULTAD DE CIENCIAS NATURALES Y MATEMÁTICAS DEPARTAMENTO DE FÍSICA SEGUNDA EVALUACIÓN DE FÍSICA A SEPTIEMBRE 3 DE 2014 SOLUCIÓN Pregunta 1 (2 puntos) Un grifo
MCU. Transmisión de movimiento. Igual rapidez. tangencial. Posee. Velocidad. Aceleración centrípeta variable. Velocidad angular constante
 DINÁMICA ROTACIONAL MCU Transmisión de movimiento Igual rapidez tangencial Posee 1 R1 2 R2 Velocidad angular constante Velocidad tangencial variable Aceleración centrípeta variable Fuerza centrípeta variable
DINÁMICA ROTACIONAL MCU Transmisión de movimiento Igual rapidez tangencial Posee 1 R1 2 R2 Velocidad angular constante Velocidad tangencial variable Aceleración centrípeta variable Fuerza centrípeta variable
FISICA 2º BACHILLERATO
 A) Definiciones Se llama movimiento periódico a aquel en que la posición, la velocidad y la aceleración del móvil se repiten a intervalos regulares de tiempo. Se llama movimiento oscilatorio o vibratorio
A) Definiciones Se llama movimiento periódico a aquel en que la posición, la velocidad y la aceleración del móvil se repiten a intervalos regulares de tiempo. Se llama movimiento oscilatorio o vibratorio
Examen de TEORIA DE MAQUINAS Diciembre 03 Nombre...
 Examen de TEORIA DE MAQUINAS Diciembre 03 Nombre... La figura muestra un manipulador paralelo horizontal plano, que consta de una plataforma en forma de triángulo equilátero de lado l, cuya masa m se halla
Examen de TEORIA DE MAQUINAS Diciembre 03 Nombre... La figura muestra un manipulador paralelo horizontal plano, que consta de una plataforma en forma de triángulo equilátero de lado l, cuya masa m se halla
MOVIMIENTO ARMÓNICO SIMPLE
 MOVIMIENTO ARMÓNICO SIMPLE Estudio del movimiento armónico simple. Desde el punto de vista dinámico, es el movimiento de una partícula que se mueve sobre una recta, sometida a la acción de una fuerza atractiva
MOVIMIENTO ARMÓNICO SIMPLE Estudio del movimiento armónico simple. Desde el punto de vista dinámico, es el movimiento de una partícula que se mueve sobre una recta, sometida a la acción de una fuerza atractiva
TEMA 2: ELEMENTOS MECÁNICOS TRANSFORMADORES DEL MOVIMIENTO. 1.- Elementos mecánicos transformadores del movimiento:
 TEMA 2: ELEMENTOS MECÁNICOS TRANSFORMADORES DEL MOVIMIENTO 1.- Elementos mecánicos transformadores del movimiento: Son los elementos encargados de transformar o cambiar el tipo de movimiento de entrada
TEMA 2: ELEMENTOS MECÁNICOS TRANSFORMADORES DEL MOVIMIENTO 1.- Elementos mecánicos transformadores del movimiento: Son los elementos encargados de transformar o cambiar el tipo de movimiento de entrada
1. Calcula la cilindrada de un motor de 4 cilindros si el diámetro del cilindro es de 50 mm y la carrera del pistón es de 85 mm.
 UNIDAD 1: El motor de combustión ACTIVIDADES - PÁG. 16 1. Calcula la cilindrada de un motor de 4 cilindros si el diámetro del cilindro es de 50 mm y la carrera del pistón es de 85 mm. 2 2 2 d 3,14 5 cm
UNIDAD 1: El motor de combustión ACTIVIDADES - PÁG. 16 1. Calcula la cilindrada de un motor de 4 cilindros si el diámetro del cilindro es de 50 mm y la carrera del pistón es de 85 mm. 2 2 2 d 3,14 5 cm
UD 10. Leyes de la dinámica
 UD 10. Leyes de la dinámica 1- Concepto de fuerza. 2- Primer principio de la dinámica. 3- Segundo principio de la dinámica. 4- Tercer principio de la dinámica. 5- Momento lineal. 6- Fuerzas: Peso, Normal,
UD 10. Leyes de la dinámica 1- Concepto de fuerza. 2- Primer principio de la dinámica. 3- Segundo principio de la dinámica. 4- Tercer principio de la dinámica. 5- Momento lineal. 6- Fuerzas: Peso, Normal,
EL MOVIMIENTO CIENCIAS: FÍSICA PLAN GENERAL SISTEMA DE REFERENCIA DESPLAZAMIENTO PREUNIVERSITARIO POPULAR FRAGMENTOS COMUNES
 EL MOVIMIENTO El movimiento siempre nos ha interesado. Por ejemplo, en el mundo de hoy consideramos el movimiento cuando describimos la rapidez de un auto nuevo o el poder de aceleración que tiene. La
EL MOVIMIENTO El movimiento siempre nos ha interesado. Por ejemplo, en el mundo de hoy consideramos el movimiento cuando describimos la rapidez de un auto nuevo o el poder de aceleración que tiene. La
Momento angular de una partícula. Momento angular de un sólido rígido
 Momento angular de una partícula Se define momento angular de una partícula respecto de del punto O, como el producto vectorial del vector posición r por el vector momento lineal mv L=r mv Momento angular
Momento angular de una partícula Se define momento angular de una partícula respecto de del punto O, como el producto vectorial del vector posición r por el vector momento lineal mv L=r mv Momento angular
Trabajo Práctico 3 - Cinemática del cuerpo rígido Edición 2014
 Facultad de Ingeniería - U.N.L.P. Mecánica Racional - urso 2016 / 1 semestre Trabajo Práctico 3 - inemática del cuerpo rígido Edición 2014 Problema 1. La barra de la figura, de longitud l, está unida mediante
Facultad de Ingeniería - U.N.L.P. Mecánica Racional - urso 2016 / 1 semestre Trabajo Práctico 3 - inemática del cuerpo rígido Edición 2014 Problema 1. La barra de la figura, de longitud l, está unida mediante
CFGS CONSTRUCCION METALICA MODULO 246 DISEÑO DE CONSTRUCCIONES METALICAS
 CFGS CONSTRUCCION METALICA MODULO 246 DISEÑO DE CONSTRUCCIONES METALICAS U.T. 4.- ESTATICA. 3.1.- Centro de gravedad de un cuerpo. Un cuerpo de masa M, se puede considerar compuesto por multitud de partículas
CFGS CONSTRUCCION METALICA MODULO 246 DISEÑO DE CONSTRUCCIONES METALICAS U.T. 4.- ESTATICA. 3.1.- Centro de gravedad de un cuerpo. Un cuerpo de masa M, se puede considerar compuesto por multitud de partículas
Transmisión de movimiento: Elementos mecánicos transformadores de movimiento
 Transmisión de movimiento: Elementos mecánicos transformadores de movimiento Siempre que se diseña una nueva máquina para realizar una actividad concreta es preciso considerar todos y cada uno de los mecanismos
Transmisión de movimiento: Elementos mecánicos transformadores de movimiento Siempre que se diseña una nueva máquina para realizar una actividad concreta es preciso considerar todos y cada uno de los mecanismos
1. Introducción TRABAJO, ENERGÍA, POTENCIA Y RENDIMIENTO Trabajo, energía y rendimiento MECANISMOS QUE TRANSFORMAN
 Mecanismos I Tecnología 3º ESO 1. Introducción.... 2 2. TRABAJO, ENERGÍA, POTENCIA Y RENDIMIENTO... 3 2.1 Trabajo, energía y rendimiento...3 3. MECANISMOS QUE TRANSFORMAN MOVIMIENTOS RECTILÍNEOS EN MOVIMIENTOS
Mecanismos I Tecnología 3º ESO 1. Introducción.... 2 2. TRABAJO, ENERGÍA, POTENCIA Y RENDIMIENTO... 3 2.1 Trabajo, energía y rendimiento...3 3. MECANISMOS QUE TRANSFORMAN MOVIMIENTOS RECTILÍNEOS EN MOVIMIENTOS
Equilibrio y Movimiento de los objetos
 Fundamentos para programación y robótica Módulo 3: Fundamentos de mecánica Capítulo 2: Equilibrio y Movimiento de los objetos. Objetivos: o Conocer del equilibrio de los objetos o Conocer del movimiento
Fundamentos para programación y robótica Módulo 3: Fundamentos de mecánica Capítulo 2: Equilibrio y Movimiento de los objetos. Objetivos: o Conocer del equilibrio de los objetos o Conocer del movimiento
Parámetros cinéticos de un sistema pistón-biela-cigüeñal
 Parámetros cinéticos de un sistema pistón-biela-cigüeñal 3-1-1 Revisado 04-07-13 En el esquema anexo vemos los componentes característicos de un compresor, que es semejante a un motor alternativo de combustión
Parámetros cinéticos de un sistema pistón-biela-cigüeñal 3-1-1 Revisado 04-07-13 En el esquema anexo vemos los componentes característicos de un compresor, que es semejante a un motor alternativo de combustión
Posición de un Cuerpo. Elementos para la descripción del movimiento. Vector de Posición y Vector Desplazamiento
 1 Bárbara Cánovas Conesa 637 70 113 www.clasesalacarta.com 1 Cinemática Posición de un Cuerpo Coordenadas Cartesianas Coordenadas Polares Vector de Posición (,, z) r, q r Elementos para la descripción
1 Bárbara Cánovas Conesa 637 70 113 www.clasesalacarta.com 1 Cinemática Posición de un Cuerpo Coordenadas Cartesianas Coordenadas Polares Vector de Posición (,, z) r, q r Elementos para la descripción
ACTIVIDAD DE APRENDIZAJE N 04 ROZAMIENTO, COJINETES Y TOLERANCIA
 1 ACTIVIDAD DE APRENDIZAJE N 04 ROZAMIENTO, COJINETES Y TOLERANCIA I. ROZAMIENTO DE ADHERENCIA Y ROZAMIENTO DE DESLIZAMIENTO Si un cuerpo descansa sobre otro, hay que aplicar una fuerza para que el superior
1 ACTIVIDAD DE APRENDIZAJE N 04 ROZAMIENTO, COJINETES Y TOLERANCIA I. ROZAMIENTO DE ADHERENCIA Y ROZAMIENTO DE DESLIZAMIENTO Si un cuerpo descansa sobre otro, hay que aplicar una fuerza para que el superior
Dinamica de rotacion. Torque. Momentum Angular. Aplicaciones.
 Dinamica de rotacion. Torque. Momentum Angular. Aplicaciones. Movimiento de rotación. Cuerpos rígidos un cuerpo con una forma definida, que no cambia en forma que las partículas que lo componen permanecen
Dinamica de rotacion. Torque. Momentum Angular. Aplicaciones. Movimiento de rotación. Cuerpos rígidos un cuerpo con una forma definida, que no cambia en forma que las partículas que lo componen permanecen
TEMA 9. MOVIMIENTO ARMÓNICO SIMPLE
 TEMA 9. MOVIMIENTO ARMÓNICO SIMPLE Un movimiento periódico es aquel que describe una partícula cuando las variables posición, velocidad y aceleración de su movimiento toman los mismos valores después de
TEMA 9. MOVIMIENTO ARMÓNICO SIMPLE Un movimiento periódico es aquel que describe una partícula cuando las variables posición, velocidad y aceleración de su movimiento toman los mismos valores después de
ACADEMIA CENTRO DE APOYO AL ESTUDIO MOVIMIENTO VIBRATORIO.
 MOVIMIENTO VIBRATORIO. Movimiento vibratorio armónico simple 1. Explica como varía la energía mecánica de un oscilador lineal si: a) Se duplica la amplitud. b) Se duplica la frecuencia. c) Se duplica la
MOVIMIENTO VIBRATORIO. Movimiento vibratorio armónico simple 1. Explica como varía la energía mecánica de un oscilador lineal si: a) Se duplica la amplitud. b) Se duplica la frecuencia. c) Se duplica la
MDOF. Dinámica Estructural Aplicada II C 2012 UCA
 MDOF Dinámica Estructural Aplicada II C 2012 UCA Desde el punto de vista dinámico, interesan los grados de libertad en los que se generan fuerzas generalizadas de inercia significativas; es decir, fuerzas
MDOF Dinámica Estructural Aplicada II C 2012 UCA Desde el punto de vista dinámico, interesan los grados de libertad en los que se generan fuerzas generalizadas de inercia significativas; es decir, fuerzas
CINEMÁTICA: MOVIMIENTO CIRCULAR, CONCEPTOS BÁSICOS Y GRÁFICAS
 CINEMÁTICA: MOVIMIENTO CIRCULAR, CONCEPTOS BÁSICOS Y GRÁFICAS Un volante cuyo diámetro es de 3 m está girando a 120 r.p.m. Calcular: a) su frecuencia, b) el periodo, c) la velocidad angular, d) la velocidad
CINEMÁTICA: MOVIMIENTO CIRCULAR, CONCEPTOS BÁSICOS Y GRÁFICAS Un volante cuyo diámetro es de 3 m está girando a 120 r.p.m. Calcular: a) su frecuencia, b) el periodo, c) la velocidad angular, d) la velocidad
ONDAS. Modelo Pregunta 2B.- La función matemática que representa una onda transversal que avanza
 ONDAS Junio 2013. Pregunta 1A.- Una onda transversal, que se propaga en el sentido positivo del eje X, tiene una velocidad de propagación de 600 m s 1 y una frecuencia de 500 Hz. a) La mínima separación
ONDAS Junio 2013. Pregunta 1A.- Una onda transversal, que se propaga en el sentido positivo del eje X, tiene una velocidad de propagación de 600 m s 1 y una frecuencia de 500 Hz. a) La mínima separación
MECANISMOS MÁQUINAS SIMPLES MECANISMOS DE TRANSMISIÓN DE MOVIMIENTOS MECANISMOS DE TRANSFORMACIÓN DE MOVIMIENTOS MECANISMOS DE ACOPLAMIENTO
 MECANISMOS MÁQUINAS SIMPLES MECANISMOS DE TRANSMISIÓN DE MOVIMIENTOS MECANISMOS DE TRANSFORMACIÓN DE MOVIMIENTOS MECANISMOS DE ACOPLAMIENTO MECANISMOS DISIPADORES DE ENERGÍA Y RETENCIÓN MECANISMOS ACUMULADORES
MECANISMOS MÁQUINAS SIMPLES MECANISMOS DE TRANSMISIÓN DE MOVIMIENTOS MECANISMOS DE TRANSFORMACIÓN DE MOVIMIENTOS MECANISMOS DE ACOPLAMIENTO MECANISMOS DISIPADORES DE ENERGÍA Y RETENCIÓN MECANISMOS ACUMULADORES
Equilibrio de fuerzas Σ F z = 0. Σ M y = 0 Σ M x = 0 Σ M z = 0. Equilibrio de momentos. Segunda ley de Newton (masa)
") Estática: leyes de Newton: equilibrio, masa, acción y reacción Primera ley de Newton (equilibrio) Un cuerpo permanece en reposo o en movimiento rectilíneo uniforme (M.R.U. = velocidad constante) si la
Estática: leyes de Newton: equilibrio, masa, acción y reacción Primera ley de Newton (equilibrio) Un cuerpo permanece en reposo o en movimiento rectilíneo uniforme (M.R.U. = velocidad constante) si la
Práctica Módulo de torsión
 Práctica Módulo de torsión Objetivo eterminar el módulo de torsión de varillas de distintos materiales por los métodos estático y dinámico. Material Aparato de torsión representado en la figura, varillas
Práctica Módulo de torsión Objetivo eterminar el módulo de torsión de varillas de distintos materiales por los métodos estático y dinámico. Material Aparato de torsión representado en la figura, varillas
FACULTAD DE INGENIERIA. ESTABILIDAD I A Sistemas de fuerzas concentradas. Principios de la estática
 FACULTAD DE INGENIERIA ESTABILIDAD I A Sistemas de fuerzas concentradas. Principios de la estática 1 Mecánica: Rama de la física que se ocupa del estado de reposo o movimiento de cuerpos sometidos a la
FACULTAD DE INGENIERIA ESTABILIDAD I A Sistemas de fuerzas concentradas. Principios de la estática 1 Mecánica: Rama de la física que se ocupa del estado de reposo o movimiento de cuerpos sometidos a la
Fuerza y movimiento. Definiciones. Carrocería no resistente a la torsión PGRT
 Definiciones Definiciones Es importe realizar correctamente la fijación de la carrocería, puesto que una fijación incorrecta puede producir daños en la carrocería, la fijación y el bastidor del chasis.
Definiciones Definiciones Es importe realizar correctamente la fijación de la carrocería, puesto que una fijación incorrecta puede producir daños en la carrocería, la fijación y el bastidor del chasis.
II. Vibración libre de un sistema de un grado de libertad
 Objetivos: 1. Definir que es vibración libre. 2. Recordar el método de diagrama de cuerpo libre para deducir las ecuaciones de movimiento. 3. Introducir el método de conservación de energía para deducir
Objetivos: 1. Definir que es vibración libre. 2. Recordar el método de diagrama de cuerpo libre para deducir las ecuaciones de movimiento. 3. Introducir el método de conservación de energía para deducir
MOVIMIENTO OSCILATORIO O VIBRATORIO
 MOVIMIENTO OSCILATORIO O VIBRATORIO 1. Movimiento armónico simple (MAS). 2. Ecuaciones del MAS. 3. Dinámica del MAS. 4. Energía del MAS. 5. El oscilador armónico. 6. El péndulo simple. Física 2º bachillerato
MOVIMIENTO OSCILATORIO O VIBRATORIO 1. Movimiento armónico simple (MAS). 2. Ecuaciones del MAS. 3. Dinámica del MAS. 4. Energía del MAS. 5. El oscilador armónico. 6. El péndulo simple. Física 2º bachillerato
Mecanismos 2. Rotación en rotación. Poleas y engranajes Transmisión por cadena.
 Mecanismos 2. Mecanismos que transforman movimientos: Rotación en rotación. Poleas y engranajes Transmisión por cadena. Rotación en traslación y viceversa : Piñón Cremallera. Rotación en alternativo regular
Mecanismos 2. Mecanismos que transforman movimientos: Rotación en rotación. Poleas y engranajes Transmisión por cadena. Rotación en traslación y viceversa : Piñón Cremallera. Rotación en alternativo regular
SEGUNDA EVALUACIÓN. FÍSICA Marzo 18 del 2015 (11h30-13h30)
") SEGUNDA EVALUACIÓN DE FÍSICA Marzo 18 del 2015 (11h30-13h30) Como aspirante a la ESPOL me comprometo a combatir la mediocridad y actuar con honestidad, por eso no copio ni dejo copiar" NOMBRE: FIRMA: VERSION
SEGUNDA EVALUACIÓN DE FÍSICA Marzo 18 del 2015 (11h30-13h30) Como aspirante a la ESPOL me comprometo a combatir la mediocridad y actuar con honestidad, por eso no copio ni dejo copiar" NOMBRE: FIRMA: VERSION
SIMULACIÓN DINÁMICA DE MECANISMOS CON ADAMS.
 PRÁCTICA 2.- SIMULACIÓN DINÁMICA DE MECANISMOS CON ADAMS. El objetivo de la segunda práctica consiste en la modelización y análisis dinámico directo e inverso de mecanismos sencillos usando el entorno
PRÁCTICA 2.- SIMULACIÓN DINÁMICA DE MECANISMOS CON ADAMS. El objetivo de la segunda práctica consiste en la modelización y análisis dinámico directo e inverso de mecanismos sencillos usando el entorno
PAU CASTILLA Y LEON JUNIO Y SEPTIEMBRE M.A.S. ONDAS José Mª Martín Hernández
 MAS Estudio dinámico y cinemático 1. (90-J11) Una pequeña plataforma horizontal sufre un movimiento armónico simple en sentido vertical, de 3 cm de amplitud y cuya frecuencia aumenta progresivamente. Sobre
MAS Estudio dinámico y cinemático 1. (90-J11) Una pequeña plataforma horizontal sufre un movimiento armónico simple en sentido vertical, de 3 cm de amplitud y cuya frecuencia aumenta progresivamente. Sobre
UNIVERSIDAD POLITÉCNICA DE EL SALVADOR ESCUELA DE FORMACIÓN BÁSICA. FÍSICA II PRÁCTICA 26 PENDULO SIMPLE
 UNIVERSIDAD POLITÉCNICA DE EL SALVADOR ESCUELA DE FORMACIÓN BÁSICA. FÍSICA II PRÁCTICA 26 PENDULO SIMPLE OBJETIVOS DEL APRENDIZAJE: ESTUDIAR LAS OSCILACIONES DEL PÉNDULO Y DETERMINAR LAS SIMPLIFICACIONES
UNIVERSIDAD POLITÉCNICA DE EL SALVADOR ESCUELA DE FORMACIÓN BÁSICA. FÍSICA II PRÁCTICA 26 PENDULO SIMPLE OBJETIVOS DEL APRENDIZAJE: ESTUDIAR LAS OSCILACIONES DEL PÉNDULO Y DETERMINAR LAS SIMPLIFICACIONES
ENERGÍA Y CANTIDAD DE MOVIMIENTO
 Cátedra: MECANICA APLICADA MECANICA Y MECANISMOS 10:47 CUERPOS RIGIDOS ENERGÍA Y CANTIDAD DE MOVIMIENTO 2016 Hoja 1 OBJETIVOS Estudiar el método del Trabajo y la Energía Aplicar y analizar el movimiento
Cátedra: MECANICA APLICADA MECANICA Y MECANISMOS 10:47 CUERPOS RIGIDOS ENERGÍA Y CANTIDAD DE MOVIMIENTO 2016 Hoja 1 OBJETIVOS Estudiar el método del Trabajo y la Energía Aplicar y analizar el movimiento
Dinámica del Sólido Rígido
 Dinámica del Sólido Rígido El presente documento de clase sobre dinámica del solido rígido está basado en los contenidos volcados en la excelente página web del curso de Física I del Prof. Javier Junquera
Dinámica del Sólido Rígido El presente documento de clase sobre dinámica del solido rígido está basado en los contenidos volcados en la excelente página web del curso de Física I del Prof. Javier Junquera
2.003 Primavera 2002 Prueba 1: soluciones. Problema 1: Este problema tiene en cuenta el sistema mecánico rotacional de la Figura 1.
 Problema 1: Este problema tiene en cuenta el sistema mecánico rotacional de la Figura 1. Figura 1. Sección transversal y vista superior. Este montaje es parecido al que se utilizó en la práctica 2. El
Problema 1: Este problema tiene en cuenta el sistema mecánico rotacional de la Figura 1. Figura 1. Sección transversal y vista superior. Este montaje es parecido al que se utilizó en la práctica 2. El
REDUCCIÓN DE VIBRACIONES
 REDUCCIÓN DE VIBRACIONES Vibraciones Mecánicas MC-571 Facultad de Ingeniería Mecánica Universidad Nacional de Ingeniería 1) Introducción Existen situaciones donde las vibraciones mecánicas pueden ser deseables
REDUCCIÓN DE VIBRACIONES Vibraciones Mecánicas MC-571 Facultad de Ingeniería Mecánica Universidad Nacional de Ingeniería 1) Introducción Existen situaciones donde las vibraciones mecánicas pueden ser deseables
CINEMÁTICA LA CINEMÁTICA
 CINEMÁTICA LA CINEMÁTICA es la parte de la Física que estudia el movimiento de los cuerpos sin tener en cuenta sus causas. Para estudiar el movimiento de un cuerpo es necesario elegir un sistema de referencia
CINEMÁTICA LA CINEMÁTICA es la parte de la Física que estudia el movimiento de los cuerpos sin tener en cuenta sus causas. Para estudiar el movimiento de un cuerpo es necesario elegir un sistema de referencia
Sólido Rígido. Momento de Inercia 17/11/2013
 Sólido ígido Un sólido rígido es un sistema formado por muchas partículas que tiene como característica que la posición relativa de todas ellas permanece constante durante el movimiento. A B El movimiento
Sólido ígido Un sólido rígido es un sistema formado por muchas partículas que tiene como característica que la posición relativa de todas ellas permanece constante durante el movimiento. A B El movimiento
Mecánica de Materiales I
 Mecánica de Materiales I Tema 3 Torsión en barras Índice de contenido Sección 1 - Deformaciones en un eje circular Tema 3 - Torsión en barras Índice de contenido Sección 2 - Esfuerzos cortantes en barras
Mecánica de Materiales I Tema 3 Torsión en barras Índice de contenido Sección 1 - Deformaciones en un eje circular Tema 3 - Torsión en barras Índice de contenido Sección 2 - Esfuerzos cortantes en barras
La solución perfecta para la propulsión de embarcaciones
 La solución perfecta para la propulsión de embarcaciones Un sistema de propulsión que reduce el ruido hasta un 90% Simplifica la instalación del motor o caja de cambios El proceso de alineación puede ser
La solución perfecta para la propulsión de embarcaciones Un sistema de propulsión que reduce el ruido hasta un 90% Simplifica la instalación del motor o caja de cambios El proceso de alineación puede ser
FÍSICA. 2º BACHILLERATO. BLOQUE II. VIBRACIONES Y ONDAS. Examen 2
 Examen 2 1. Diga si es cierto o falso y razone la respuesta: La frecuencia con la que se percibe un sonido no depende de la velocidad del foco emisor. 2. Dibujar, superponiendo en la misma figura, dos
Examen 2 1. Diga si es cierto o falso y razone la respuesta: La frecuencia con la que se percibe un sonido no depende de la velocidad del foco emisor. 2. Dibujar, superponiendo en la misma figura, dos
Índice general Efecto del AAE en el funcionamiento del motor... 41
 Índice general 1. Parámetros característicos 1 1.1. Cuestiones.................................. 1 1.1.1. Concepto de parámetro normalizado............... 1 1.1.2. Cálculo de parámetros normalizados...............
Índice general 1. Parámetros característicos 1 1.1. Cuestiones.................................. 1 1.1.1. Concepto de parámetro normalizado............... 1 1.1.2. Cálculo de parámetros normalizados...............
Y SISTEMASEleELE ELEMENTOS DE MÁQUINAS Y SISTEMAS
 Y SISTEMASEleELE ELEMENTOS DE MÁQUINAS Y SISTEMAS 1 Mecanismos y sistemas mecánicos Mecanismo Conjunto de elementos conectados entre sí por medio de articulaciones móviles cuya misión es: transformar una
Y SISTEMASEleELE ELEMENTOS DE MÁQUINAS Y SISTEMAS 1 Mecanismos y sistemas mecánicos Mecanismo Conjunto de elementos conectados entre sí por medio de articulaciones móviles cuya misión es: transformar una
1. Características del movimiento
 CINEMÁTICA TEMA 1 1. Características del movimiento En el universo todo está en continuo movimiento. Movimiento es el cambio de posición de un cuerpo a lo largo del tiempo respecto a un sistema de referencia
CINEMÁTICA TEMA 1 1. Características del movimiento En el universo todo está en continuo movimiento. Movimiento es el cambio de posición de un cuerpo a lo largo del tiempo respecto a un sistema de referencia
MOVIMIENTO ARMÓNICO SIMPLE
 MOVIMIENTO ARMÓNICO SIMPLE Junio 2016. Pregunta 2A.- Un bloque de 2 kg de masa, que descansa sobre una superficie horizontal, está unido a un extremo de un muelle de masa despreciable y constante elástica
MOVIMIENTO ARMÓNICO SIMPLE Junio 2016. Pregunta 2A.- Un bloque de 2 kg de masa, que descansa sobre una superficie horizontal, está unido a un extremo de un muelle de masa despreciable y constante elástica
BIOMECÁNICA Y REHABILITACIÓN DEPORTIVA Valoración Funcional aplicada a Fisioterapia y Readaptación Física Conceptos de Biomecánica.
 BIOMECÁNICA Y REHABILITACIÓN DEPORTIVA Valoración Funcional aplicada a Fisioterapia y Readaptación Física Conceptos de Biomecánica. https://africalopezillescas.wordpress.com/acerca-de/ Funcionalidad del
BIOMECÁNICA Y REHABILITACIÓN DEPORTIVA Valoración Funcional aplicada a Fisioterapia y Readaptación Física Conceptos de Biomecánica. https://africalopezillescas.wordpress.com/acerca-de/ Funcionalidad del
I. Objetivos. II. Introducción.
 Universidad de Sonora División de Ciencias Exactas y Naturales Departamento de Física Laboratorio de Mecánica II Práctica #: Dinámica rotacional: Cálculo del Momento de Inercia I. Objetivos. Medir el momento
Universidad de Sonora División de Ciencias Exactas y Naturales Departamento de Física Laboratorio de Mecánica II Práctica #: Dinámica rotacional: Cálculo del Momento de Inercia I. Objetivos. Medir el momento
FUNDAMENTO DE MOTORES
 FUNDAMENTO DE MOTORES Capítulo 2: Componentes Básicos del Motor Recopilado por: M. En C. José Antonio Glez. M. Bloque del Motor, Monoblock o Block Es la parte principal de la Estructura del motor y es
FUNDAMENTO DE MOTORES Capítulo 2: Componentes Básicos del Motor Recopilado por: M. En C. José Antonio Glez. M. Bloque del Motor, Monoblock o Block Es la parte principal de la Estructura del motor y es
Guia N 6 - Primer cuatrimestre de 2007 Sólidos rígidos planos. Energía potencial y mecánica.
 æ Mecánica CLásica Guia N 6 - Primer cuatrimestre de 2007 Sólidos rígidos planos. Energía potencial y mecánica. Problema 1: Dos barras delgadas uniformes de longitudes iguales, l=0.5 m, una de 4 kg y la
æ Mecánica CLásica Guia N 6 - Primer cuatrimestre de 2007 Sólidos rígidos planos. Energía potencial y mecánica. Problema 1: Dos barras delgadas uniformes de longitudes iguales, l=0.5 m, una de 4 kg y la
Análisis Topológico de Máquinas y Mecanismos. MAQUINAS Y MECANISMOS. Análisis Topológico.
 Análisis Topológico de Máquinas y Mecanismos 1 Índice Teoría a de Máquinas M y Mecanismos. Definiciones. Pares cinemáticos ticos. Clasificación n de miembros. Esquemas y modelos de mecanismos. Mecanismos
Análisis Topológico de Máquinas y Mecanismos 1 Índice Teoría a de Máquinas M y Mecanismos. Definiciones. Pares cinemáticos ticos. Clasificación n de miembros. Esquemas y modelos de mecanismos. Mecanismos
Programa de la ITF para la Formación de Entrenadores. Biomecánica del. tenis: Conceptos y aplicaciones. Miguel Crespo Responsable de Investigación ITF
 Programa de la ITF para la Formación de Entrenadores Biomecánica del Miguel Crespo Responsable de Investigación ITF tenis: Conceptos y aplicaciones Biomecánica Definición Ciencia que estudia la adaptación
Programa de la ITF para la Formación de Entrenadores Biomecánica del Miguel Crespo Responsable de Investigación ITF tenis: Conceptos y aplicaciones Biomecánica Definición Ciencia que estudia la adaptación
Máquinas Simples. Sumario
 Máquinas Simples Sumario 1. PALANCA DE PRIMER GÉNERO... 1 2. PALANCA DE SEGUNDO GÉNERO... 3 3. PALANCA DE TERCER GÉNERO... 4 4. POLEA FIJA... 4 5. POLEA MÓVIL... 6 6. APAREJO POTENCIAL... 6 7. APAREJO
Máquinas Simples Sumario 1. PALANCA DE PRIMER GÉNERO... 1 2. PALANCA DE SEGUNDO GÉNERO... 3 3. PALANCA DE TERCER GÉNERO... 4 4. POLEA FIJA... 4 5. POLEA MÓVIL... 6 6. APAREJO POTENCIAL... 6 7. APAREJO
Física I F-123 PF1.7 Año 2017
 Práctica 6: Sólido Rígido 1. Determinar en cada caso el momento de inercia del sistema respecto de los ejes indicados. Utilizar cuando sea conveniente el teorema de Steiner. 2. Un disco de masa m = 50
Práctica 6: Sólido Rígido 1. Determinar en cada caso el momento de inercia del sistema respecto de los ejes indicados. Utilizar cuando sea conveniente el teorema de Steiner. 2. Un disco de masa m = 50
APLICACIONES DE LAS LEYES DE NEWTON
 APLICACIOES DE LAS LEYES DE EWTO Peso Fuerzas normales Cuerpos apoyados sobre una superficie horizontal Cuerpos apoyados sobre una superficie inclinada Fuerza de rozamiento Cuerpos en movimiento Cuerpos
APLICACIOES DE LAS LEYES DE EWTO Peso Fuerzas normales Cuerpos apoyados sobre una superficie horizontal Cuerpos apoyados sobre una superficie inclinada Fuerza de rozamiento Cuerpos en movimiento Cuerpos
MECÁNICA CLÁSICA CINEMATICA. FAyA Licenciatura en Química Física III año 2006
 Física III año 26 CINEMATICA MECÁNICA CLÁSICA La cinemática estudia el movimiento de los cuerpos, sin tener en cuenta las causas que lo producen. Antes de continuar establezcamos la diferencia entre un
Física III año 26 CINEMATICA MECÁNICA CLÁSICA La cinemática estudia el movimiento de los cuerpos, sin tener en cuenta las causas que lo producen. Antes de continuar establezcamos la diferencia entre un
RMS3301-L12M VERIFICACIÓN DEL CIGÜEÑAL Y METALES AXIALES
 RMS3301-L12M VERIFICACIÓN DEL CIGÜEÑAL Y METALES AXIALES CARRERA: 41072 ING. DE EJECUCIÓN EN MECÁNICA AUTOMOTRIZ Y AUTOTRÓNICA 41802 TÉCNICO EN MECÁNICA AUTOMOTRIZ Y AUTOTRÓNICA ASIGNATURA: RMS3301 REPARACIÓN
RMS3301-L12M VERIFICACIÓN DEL CIGÜEÑAL Y METALES AXIALES CARRERA: 41072 ING. DE EJECUCIÓN EN MECÁNICA AUTOMOTRIZ Y AUTOTRÓNICA 41802 TÉCNICO EN MECÁNICA AUTOMOTRIZ Y AUTOTRÓNICA ASIGNATURA: RMS3301 REPARACIÓN
Mecánica y Ondas. Planteamiento y resolución de problemas tipo
 Mecánica y Ondas. Planteamiento y resolución de problemas tipo Alvaro Perea Covarrubias Doctor en Ciencias Físicas Universidad Nacional de Educación a Distancia Madrid, Enero 2005 Capítulo 1. Leyes de
Mecánica y Ondas. Planteamiento y resolución de problemas tipo Alvaro Perea Covarrubias Doctor en Ciencias Físicas Universidad Nacional de Educación a Distancia Madrid, Enero 2005 Capítulo 1. Leyes de
CORRIENTE ALTERNA. Onda senoidal:
 CORRIENTE ALTERNA Onda senoidal: En corriente alterna, la tensión varía continuamente en el tiempo, tomando valores positivos y negativos. La forma más común de corriente alterna es la senoidal. Se debe
CORRIENTE ALTERNA Onda senoidal: En corriente alterna, la tensión varía continuamente en el tiempo, tomando valores positivos y negativos. La forma más común de corriente alterna es la senoidal. Se debe
Universidad Nacional del Litoral Facultad de Ingeniería y Ciencias Hídricas GUÍA DE PROBLEMAS
 UNIDAD V: CUERPO RÍGIDO GUÍA DE PROBLEMAS 1) a) Calcular los valores de los momentos de cada una de las fuerzas mostradas en la figura respecto del punto O, donde F1 = F = F3 = 110N y r1 = 110 mm, r =
UNIDAD V: CUERPO RÍGIDO GUÍA DE PROBLEMAS 1) a) Calcular los valores de los momentos de cada una de las fuerzas mostradas en la figura respecto del punto O, donde F1 = F = F3 = 110N y r1 = 110 mm, r =
UNIVERSIDAD POLITÉCNICA DE CATALUÑA. Estudio del desequilibrio de un motor de 6 cilindros en V
 UNIVERSIDAD POLITÉCNICA DE CATALUÑA Escuela Técnica Superior de Ingeniería Industrial y Aeronáutica de Terrassa Grado en Tecnologías Industriales Estudio del desequilibrio de un motor de 6 cilindros en
UNIVERSIDAD POLITÉCNICA DE CATALUÑA Escuela Técnica Superior de Ingeniería Industrial y Aeronáutica de Terrassa Grado en Tecnologías Industriales Estudio del desequilibrio de un motor de 6 cilindros en
CURSO: MECÁNICA DE SÓLIDOS II
 UNIVERSIDAD NACIONAL DEL CALLAO FACULAD DE INGENIERÍA ELÉCRICA Y ELECRÓNICA ESCUELA PROFESIONAL DE INGENIERÍA ELÉCRICA CURSO: MECÁNICA DE SÓLIDOS II PROFESOR: ING. JORGE A. MONAÑO PISFIL CURSO DE MECÁNICA
UNIVERSIDAD NACIONAL DEL CALLAO FACULAD DE INGENIERÍA ELÉCRICA Y ELECRÓNICA ESCUELA PROFESIONAL DE INGENIERÍA ELÉCRICA CURSO: MECÁNICA DE SÓLIDOS II PROFESOR: ING. JORGE A. MONAÑO PISFIL CURSO DE MECÁNICA
Unidad 6. Objetivos. Equilibrio, momento de una fuerza. Al término de la unidad, el alumno:
 Unidad 6 Equilibrio, momento de una fuerza Objetivos Al término de la unidad, el alumno: Definir e identificar los brazos de palanca que se generan por la aplicación de fuerzas que se aplican sobre algunos
Unidad 6 Equilibrio, momento de una fuerza Objetivos Al término de la unidad, el alumno: Definir e identificar los brazos de palanca que se generan por la aplicación de fuerzas que se aplican sobre algunos
Desplazamiento. Distancia en línea recta entre la posición inicial y final de un punto que se ha movido en un marco de referencia.
 Tipos de Movimiento Conceptos Básicos Desplazamiento. Distancia en línea recta entre la posición inicial y final de un punto que se ha movido en un marco de referencia. Ciclo, periodo, fase y transmisión
Tipos de Movimiento Conceptos Básicos Desplazamiento. Distancia en línea recta entre la posición inicial y final de un punto que se ha movido en un marco de referencia. Ciclo, periodo, fase y transmisión
Ejercicios y Problemas de Fatiga
 UNIVERSIDAD SIMON BOLIVAR División de Física y Matemáticas Departamento de Mecánica MC2143-Mecánica de Materiales III Ejercicios y Problemas de Fatiga Problema No. 1 En la Fig. 1a se muestra el esquema
UNIVERSIDAD SIMON BOLIVAR División de Física y Matemáticas Departamento de Mecánica MC2143-Mecánica de Materiales III Ejercicios y Problemas de Fatiga Problema No. 1 En la Fig. 1a se muestra el esquema
Curso ICA de: ESTUDIOS DE MOTOR. ELEMENTOS
 Curso ICA de: ESTUDIOS DE MOTOR. ELEMENTOS DURACIÓN: 80 HORAS OBJETIVOS Realizar el montaje, desmontaje y la reparación de los componentes del motor, verificando el proceso, haciendo uso de las herramientas
Curso ICA de: ESTUDIOS DE MOTOR. ELEMENTOS DURACIÓN: 80 HORAS OBJETIVOS Realizar el montaje, desmontaje y la reparación de los componentes del motor, verificando el proceso, haciendo uso de las herramientas
Capítulo 10. Rotación de un Cuerpo Rígido
 Capítulo 10 Rotación de un Cuerpo Rígido Contenido Velocidad angular y aceleración angular Cinemática rotacional Relaciones angulares y lineales Energía rotacional Cálculo de los momentos de inercia Teorema
Capítulo 10 Rotación de un Cuerpo Rígido Contenido Velocidad angular y aceleración angular Cinemática rotacional Relaciones angulares y lineales Energía rotacional Cálculo de los momentos de inercia Teorema
Problemas de Movimiento vibratorio. MAS 2º de bachillerato. Física
 Problemas de Movimiento vibratorio. MAS º de bachillerato. Física 1. Un muelle se deforma 10 cm cuando se cuelga de él una masa de kg. Se separa otros 10 cm de la posición de equilibrio y se deja en libertad.
Problemas de Movimiento vibratorio. MAS º de bachillerato. Física 1. Un muelle se deforma 10 cm cuando se cuelga de él una masa de kg. Se separa otros 10 cm de la posición de equilibrio y se deja en libertad.
Nombre: Matricula: OBJETIVO El alumno comprenderá y analizará el balanceo dinámico de un sistema en un plano y en dos planos.
 Nombre: Matricula: Grupo de Lab.: PRÁCTICA 5 BALANCEO DINÁMICO Examen Rapido 20 Cálculos y dibujos 10 Resultados 15 Conclusiones 30 Investigaciones 15 Comentarios y 10 Observaciones CALIFICACIÓN TOTAL
Nombre: Matricula: Grupo de Lab.: PRÁCTICA 5 BALANCEO DINÁMICO Examen Rapido 20 Cálculos y dibujos 10 Resultados 15 Conclusiones 30 Investigaciones 15 Comentarios y 10 Observaciones CALIFICACIÓN TOTAL
CÁTEDRA DE FÍSICA I OSCILACIONES - PROBLEMAS RESUELTOS
 CÁTEDRA DE FÍSICA I Ing. Civil, Ing. Electromecánica, Ing. Eléctrica, Ing. Mecánica OSCILACIONES - PROBLEMAS RESUELTOS PROBLEMA Nº 1 Un cuerpo oscila con movimiento armónico simple a lo largo del eje x.
CÁTEDRA DE FÍSICA I Ing. Civil, Ing. Electromecánica, Ing. Eléctrica, Ing. Mecánica OSCILACIONES - PROBLEMAS RESUELTOS PROBLEMA Nº 1 Un cuerpo oscila con movimiento armónico simple a lo largo del eje x.
Academia Local de Física. Ing. Rafael A. Sánchez Rodríguez
 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Problemas. 1) 4.1. Dibuje un diagrama de cuerpo libre correspondiente a las situaciones ilustradas en la figura 4.19a y b. Descubra un punto donde actúen las fuerzas
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Problemas. 1) 4.1. Dibuje un diagrama de cuerpo libre correspondiente a las situaciones ilustradas en la figura 4.19a y b. Descubra un punto donde actúen las fuerzas