TECNOLOGÍA BEAGLEBONE BLACK BAJO SOFTWARE LIBRE.
|
|
|
- Alberto Saavedra Plaza
- hace 5 años
- Vistas:
Transcripción


1
2 OBJETIVO GENERAL DISEÑAR E IMPLEMENTAR UN DISPOSITIVO DE APOYO PARA LA MOVILIDAD DE PERSONAS NO VIDENTES USANDO EL SENSOR DE MOVIMIENTO ASUS XTION PRO LIVE Y TECNOLOGÍA BEAGLEBONE BLACK BAJO SOFTWARE LIBRE.
3 OBJETIVOS ESPECÍFICOS Comprender cuáles son los principales problemas que presenta una persona con discapacidad visual para movilizarse de manera segura y adecuada de un lugar a otro. Investigar y comprender cuál es el funcionamiento del sensor de movimiento ASUS XTION PRO LIVE. Consultar cómo funciona la mini computadora BEAGLEBONE BLACK.
4 OBJETIVOS ESPECÍFICOS Implementar un dispositivo para detección de obstáculos en la trayectoria de las personas no videntes mediante procesamiento de imágenes para apoyo de su movilidad. Realizar pruebas para determinar el correcto funcionamiento del dispositivo para detección de obstáculos en tiempo real y su eficiencia para informar al usuario de la presencia de los mismos. Realizar un análisis de los resultados obtenidos de las pruebas para determinar el correcto funcionamiento del dispositivo y en caso de ser necesario ejecutar ajustes, calibración y mejoras necesarias en el prototipo para asegurar su adecuado funcionamiento.
5 RESUMEN DEL PROYECTO El presente proyecto tiene como propósito el diseño e implementación de un sistema de apoyo para la movilidad de personas no videntes La recepción de imágenes se realiza a través de la cámara del ASUS XTION PRO LIVE y los datos recibidos son enviados y procesados en el microprocesador BEAGLEBONE BLACK, mediante el programa POINT CLOUD LIBRARY, permitiendo determinar la presencia y la ubicación de obstáculo. Para la interfaz con el usuario se utiliza una salida auditiva, que permite indicar la presencia de obstáculos y la indicación del posible camino a tomar para evadirlos

6 Tarjeta BeagleBone Black. Cámara ASUS XTION PRO LIVE. Point Cloud Library Diseño e Implementación del dispositivo. Conclusiones Recomendaciones
7 Tarjeta BeagleBone Black BeagleBone Black fue diseñada por Gerald Coley. De la familia BagleBoneBoard.org diseñada con un procesador ARM Cortex-A8. BeagleBone Black es una tarjeta de desarrollo de bajo costo, para desarrolladores y aficionados. Permite manejarse con Linux o Windows con solo una conexión a través de un cable USB.

8 Elementos de la tarjeta BEAGLEBONE BLACK


9 Formas de conexión de la 1. Escritorio independiente tarjeta BBB 1 fuente de poder de 5VDC Monitor HDMI 1 cable HDMI 1 teclado y un mouse. Figura 3 Configuración independiente BBB


10 2. Conexión a una PC mediante el cable USB La tarjeta es alimentada por la computadora a través del cable USB. Se accede a ella como una unidad de almacenamiento USB a través del navegador. Acceso a la tarjeta como una unidad de almacenamiento. Conexión independiente Ethernet. Figura 2 Conexión de la tarjeta BeagleBone Black a una PC mediante el cable USB.

11 Asus Xtion Pro Live Figura 17 Asus Xtion PRO LIVE
12 Asus Xtion Pro Live Xtion Pro Live permite crear nuevas aplicaciones para juegos, industria, educación, medicina, etc. Es totalmente abierto, facilita el manejo de aplicaciones basadas en movimiento, es simple e intuitivo. Incluye un puerto USB y es compatible con OpenNI NiTE que es uno de los más robustos y avanzados software para visión 3D por computadora. Utiliza un sensor infrarrojo para la detección de la profundidad, el color y sonido que permite percibir los movimientos del usuario en tiempo real.

13 Especificaciones de Asus Xtion Pro Live La tecnología utilizada por Asus Xtion Pro Live no se centra solo en la posición del objeto, sino también en la detección y codificación de los haces de luz reflejada por los objetos. Para obtener los datos de profundidad, el sensor emite un patrón infrarrojo conocido como el que se muestra en la figura, y para calcular la distancia de cada punto mide la deformación de los puntos que componen esa malla Figura 19 Malla de puntos infrarrojo
14 Limitaciones de Asus Xtion Pro Live El sensor Asus Xtion Pro Live tiene limitaciones en cuanto a la lectura de la profundidad debido a factores como la construcción de la cámara y condiciones propias del medio a trabajar. Los rayos emitidos por el sensor en objetos a cortas distancias tienden a retorna valores muy similares, en el caso de objetos a largas distancias no retorna valores. Además, los valores retornados pueden ser nans que son resultados imposibles de calcular.
15 Point Cloud Library Este proyecto iniciado en el 2010 por Willow Garage. PCL integra el uso de sensores 3D, permitiendo no solo el reconocimiento de objetos sino la determinación de parámetros como distancia y movimiento en tiempo real. PCL es una de las soluciones para el procesamiento 3D, es una librería multiplataforma de software abierto que permite recibir información de sensores como Asus y se divide en submódulos para diferentes tópicos, como filtros, visualización, segmentación, registro, búsqueda, estimación, etc.

16 Nube de puntos Una nube de puntos es una estructura de datos utilizada para representar una colección de puntos multidimensionales y se utiliza comúnmente para representar los datos en tres dimensiones. En una nube de puntos 3D, los puntos por lo general representan los ejes X, Y y Z coordenadas geométricas de una superficie muestreada subyacente. Cuando la información de color está presente (ver la figura 13), la nube de puntos se convierte en 4D. Figura 13 Nube de puntos
17 Diseño e implementación del dispositivo
18 Consideraciones de diseño Para realizar el programa bajo el cual funcionará el dispositivo, se tendrán en cuenta varias consideraciones previas como: El rango de visión La altura promedio a la cual se encontrará el sensor Asus Xtion Pro Live. El ambiente de prueba.
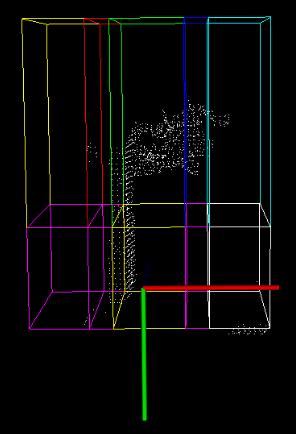
 hacia arriba (-)). Eje Z: Profundidad del campo de visión (origen (0) hacia atrás (+)).")
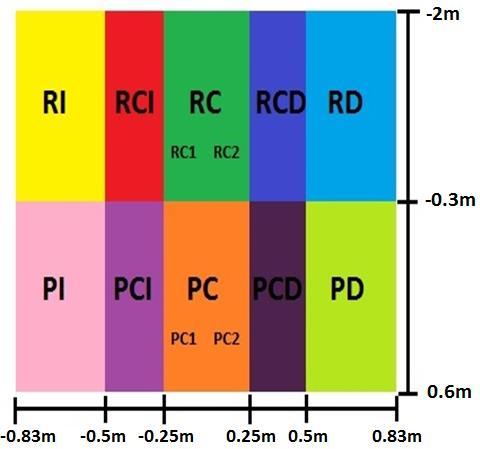
19 Sistema de coordenadas del sensor Eje X: Ancho del rango de visión (izquierda (-) a derecha (+)). Eje Y: Altura del rango de visión (abajo (+) hacia arriba (-)). Eje Z: Profundidad del campo de visión (origen (0) hacia atrás (+)). Figura 42 Sistemas de coordenadas del sensor
20 Consideraciones del campo de visión Figura 43 Campo de visión con ASUS a 1.7 m del suelo.

21 Diagrama de flujo de la programación Figura 1. Diagrama de flujo

22 Captura de la imagen Figura 47 Imagen capturada por ASUS XTION PRO LIVE

23 Optimización de la imagen IMAGEN ORIGINAL CAPTURADO CON ASUS XTIO PRO LIVE

24 Optimización de la imagen Eliminación de NaNs Downsampling Figura 49 Imagen sin Nans Figura 49 Efecto downsampling


25 Segmentación en profundidad: eje Z Imagen original Imagen segmentada en profundidad a 1.60 m filter.setfilterlimits(0.8, 1.60)

26 Segmentación en altura: eje Y Imagen original Imagen segmentada en altura filter.setfilterlimits(-0.2,0.9);
27 Segmentación en el eje X Imagen original Imagen segmentada en x filter.setfilterlimits [-0.8 a 0.8 m];

28 Extracción de objetos en la imagen Imagen original Imagen aplicado SACSegmentation
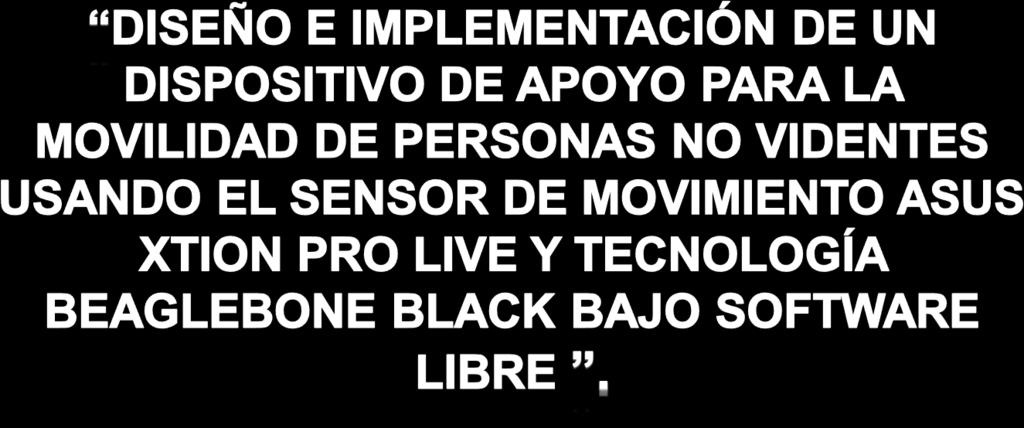
29 Seccionamiento de la imagen Cada una de las imágenes para su procesamiento es dividida en las siguientes secciones: Rótulos elevados al lado izquierdo (RI) Rótulos elevados en la parte central izquierda (RCI) Rótulos elevados en la parte central (RC) Rótulos elevados en la parte central 1 (RC1) Rótulos elevados en la parte central 2 (RC2) Rótulos elevados en la parte central derecha (RCD) Rótulos elevados a la derecha (RD) Obstáculos localizados en el piso al lado izquierdo (PI) Obstáculos localizados en el piso en la parte central izquierda (PCI) Obstáculos localizados en el piso en la parte central (PC) Obstáculos localizados en el piso en la parte central 1 (PC1) Obstáculos localizados en el piso en la parte central 2 (PC2) Obstáculos localizados en el piso en la parte central derecha (PCD) Obstáculos localizados en el piso a la derecha (PD)
30 Seccionamiento de la imagen
31 Seccionamiento de la imagen
32 Seccionamiento de la imagen


33 Indicaciones de posibles acciones a tomar ante la presencia de obstáculos El algoritmo desarrollado presenta resultados en forma visual y auditiva, para la salida auditiva se emplea la tarjeta de sonido 7.1 Channel Sound (figura 58) y se la configura para su reconocimiento en la BeagleBone Black, además de un par de audífonos como interfaz con el usuario, se cuenta con cuatro tonos a diferente frecuencia y duración para distinguir cada una de las salidas de respuesta. Figura 58 Channel Sound 7.1
34 Indicaciones de posibles acciones a tomar ante la presencia de obstáculos INDICACIÓN Siga caminando Obstrucción total Vaya hacia la derecha Vaya hacia la izquierda TABLA 10 Indicaciones de posibles acciones a tomar ante la presencia de obstáculos.

35 Indicaciones de posibles acciones a tomar ante la presencia de obstáculos En la figura 59 se observa la imagen a procesar capturada con el sensor Asus Xtion Pro Live en Point Cloud Library, mientras que la imagen obtenida después del procesamiento de la misma se muestra en la figura 60 con las secciones en las que se divide la imagen para determinar la presencia de obstáculos.

36 Indicaciones de posibles acciones a tomar ante la presencia de obstáculos

37 Indicaciones de posibles acciones a tomar ante la presencia de obstáculos Figura 61 Salida de respuesta escrita.
38 Pruebas
39 Nivel Excelente Detalles Indica una detección aproximada del 85% al 100% del obstáculo. Muy bueno Indica una detección aproximada del 68% al 84% del obstáculo. Bueno Indica una detección aproximada del 48 % al 67% del obstáculo. Malo Indica una detección aproximada del 30 % al 47% del obstáculo. Muy malo Indica una detección aproximada del 16 % al 29% del obstáculo. Nulo Indica una detección aproximada del 0 % al 15% del obstáculo. Tabla 13 Niveles de detección de obstáculos


40 PORCENTAJE DE DETECCIÓN PORCENTEJE DE DETCCIÓN PORCENTAJE DE DETECCIÓN Pruebas de detección de presencia de obstáculos PORCENTAJE DE DE DETECCIÓN SEGÚN EL ESPESOR DEL OBSTÁCULO PORCENTAJE DE DE DETECCIÓN SEGÚN LA FORMA DEL OBSTÁCULO % % 80 80% 60 60% 40 40% 20 20% A m 0.03 m en adelante ESPESOR DEL OBSTÁCULO 0% Cuadrado Triangular Circular Amorfo FORMA DEL OBSTÁCULO PORCENTAJE DE DE DETECCIÓN SEGÚN EL MATERIAL DEL OBSTÁCULO MATERIAL


41 PORCENTAE DE DETECCIÓN PORCENTAJE DE DETECCCIÓN Pruebas de comportamiento del dispositivo ante diversos ambientes PORCENTAJE DE DETECCIÓN EN AMBIENTES INTERIORES Luz artificial Influencia de luz solar Obscuridad AMBIENTE PORCENTAJE DE DETECCIÓN EN AMBIENTES EXTERIORES Luz solar (12 pm) AMBIENTE Bajo nivel de luz solar (5 pm)

42 Pruebas de comportamiento del dispositivo ante diversos ambientes Ambientes exteriores a diferentes horas del día, y bajo influencia de luz solar y ausencia de luz..

43 Pruebas de comportamiento del dispositivo ante diversos ambientes.

44 Pruebas de comportamiento del dispositivo ante diversos ambientes Ambientes exteriores a diferentes horas del día, y bajo influencia de luz solar..

45 Pruebas de comportamiento del dispositivo ante diversos ambientes.
46 Resultados de pruebas de comportamiento del dispositivo ante diversos ambientes De lo anteriormente expuesto se establece que el dispositivo puede ser utilizado con mayor eficiencia por personas con discapacidad visual moderada. y la discapacidad visual grave que desde el punto de vista funcional, pueden considerarse como personas con baja visión puesto que poseen un resto visual suficiente para ver la luz, orientarse por ella y emplearla con propósitos funcionales durante el día, en tanto que el dispositivo ayudaría principalmente en casos de bajo nivel de luz que incrementa el riesgo de accidentes. Para personas con ceguera total el dispositivo puede servir como un dispositivo de entrenamiento y ayuda durante horarios específicos del día ya que una persona con ceguera no distingue en forma alguna la presencia a ausencia de luz.

47 Ventajas BASTÓN La cámara se mantiene en una posición fija a una altura ideal, lo que asegura una captura de las imágenes adecuada. Dependiendo del terreno se reducen las vibraciones que. puede sufrir la cámara y que generan errores en la captura de imágenes. Se obtiene un amplio ángulo de visión desde el suelo hasta 1.7 m. aproximadamente, permitiendo la detección obstáculos bajos. Desventajas La persona que utiliza el bastón implementado, debe prescindir de su bastón habitual lo que repercute en la comodidad del mismo y puede generar confusión en la persona. El bastón sólo puede ser utilizado en superficies planas y con baja fricción. Si el terreno no es plano, se producirá vibraciones que afectan al dispositivo.
48 PRUEBAS DE FUNCIONAMIENTO DEL DISPOSITIVO PRUEBAS CON PERSONAS CON DISCAPACIDAD VISUAL Nombres Obstáculos Obstáculos Obstáculos no Obstáculos no detectados detectados (%) detectados detectados (%) Molina William 9 69,23% 4 30,77% Chicaiza Néstor 10 76,22% 3 23,08% Jácome Segundo 11 84,61% 2 15,39% López Rita 11 84,61% 2 15,39% TOTAL 41 78,85% 11 21,15% Tabla 40 Pruebas con personas con discapacidad visual
49 COMPROBACIÓN DE LA HIPÓTESIS El diseño e implementación de un dispositivo de apoyo para personas no videntes usando el sensor de movimiento ASUS XTION PRO LIVE y tecnología BEAGLEBONE BLACK bajo software libre ayudará a mejorar la movilidad de dichas personas y reducirá el riesgo de accidentes?

50 Prueba de proporciones de una muestra Z prueba = x n p o p o (1 p o n La hipótesis es aceptada ya que Z de prueba = es menor que Z =1.64 de la tabla, por lo tanto el valor calculado de z se encuentra en la región de aceptación, por lo que la hipótesis es aceptada en el nivel 0.05 por lo que el sistema desarrollado apoya (lo que dice la hipótesis).
51 CONCLUSIONES El algoritmo desarrollado para la detección de obstáculos cumple con los requerimientos del dispositivo ya que identifica correctamente la presencia tanto de obstáculos a nivel del suelo y obstáculos levados como rótulos, cada uno de ellos en las diferentes áreas como son parte central, parte derecha y parte izquierda del camino, dando una salida confiable del posible camino a tomar en caso de presencia de obstáculos. El sensor Asus Xtion Pro Live proporciona imágenes bastante fiables en tres dimensiones del ambiente capturado, siempre y cuando su ambiente de trabajo sea bajo ciertas condiciones como bajo nivel de luz solar que afecta directamente a la recepción de la imagen, por falta de reflexión de la malla de puntos infrarrojos; mientras que para trabajar en ambientes con una cantidad nula o muy baja de luz, el dispositivo presenta una salida muy confiable, las imágenes adquiridas en la obscuridad detectan los obstáculos presentes en el ambiente con gran precisión. Asus Xtion Pro Live adquiere imágenes de los objetos sin importar la forma del mismo, pudiendo ser cuadrados, circulares, elípticos, triangulares o amorfos, sin embargo, si se ve afectado por el tamaño del mismo ya que si su altura es inferior a los 5 cm su detección no es fiable.
52 La captura de imágenes y la detección de obstáculos dentro de ellas es fiable para objetos de casi cualquier material, como madera, plástico, cemento, piedra, metal no reflectante, objetos de carácter vegetal, cuero, cartón, cerámica, etc. sin embargo para materiales reflectantes, de vidrio o transparentes la detección es muy imprecisa o casi nula obteniendo errores en las salidas de decisión del algoritmo. El espesor de los objetos a detectar no influye en gran medida, ya que son detectados de forma fiable desde 1 cm de espesor en adelante, siempre y cuando se encuentren en el área de detección del sensor y su material corresponda a los señalados como detectables en el punto anterior. Los objetos son detectados independientemente de la profundidad o distancia a la que se hallan los objetos, manteniendo mayor fiabilidad a partir de una distancia superior a 0.80 m y menor a los 3.5 m que es el rango de operación de la cámara Asus Xtion Pro Live.
53 Las secciones en las que se dividió la imagen para su análisis están en base a las dimensiones estimadas de una persona promedio 1.10 m aproximadamente y el área aproximada que ésta requeriría para su desplazamiento, que en este caso es de 0.6 m La detección de obstáculos está basada en la identificación de puntos dentro de las secciones de análisis que representan un impedimento para la circulación libre por dicha área, más no en la identificación de objetos específicos de forma individual. La salida de respuesta del dispositivo se considera lenta ya que le toma un promedio de 1.7 s el procesar la imagen y emitir una salida debido a las características propias de la tarjeta BeagleBone Black, como el tamaño de la memoria RAM, sin embargo, éste tiempo está dentro del considerado como aceptable para que la persona pueda asimilar la instrucción dada.
54 El procesamiento de imágenes se desarrolló con Point Cloud Library, por ser un software libre que da la posibilidad de aprovechar la capacidad del sensor de adquirir imágenes en 3 dimensiones de los ambientes, además de librerías, clases, métodos y funciones precargadas que facilitan el análisis de dichas imágenes, además de una visualización realista del ambiente. La captura de imágenes requiere ser realizada bajo la menor variación de posicionamiento del sensor para mayor fiabilidad, pudiendo producirse salidas falsas por presencia de obstáculos inexistentes generados por la variación del mismo. La altura a la que se coloca el dispositivo de captura de imágenes influye directamente a la respuesta que el dispositivo presenta, y se debe tener considerar que la respuesta más acertada se logra a una altura de 0.60 m siempre y cuando no existan variaciones bruscas del mismo y el ambiente cumpla con las condiciones de luz adecuadas. Asus Xtion Pro Live presenta ciertas limitaciones de funcionamiento bajo determinadas condiciones ambientales no controlables como la presencia directa de luz solar, que impide la reflexión de la malla de rayos infrarrojos y por ende la detección de los obstáculos, sin embargo, hay que tener presente que mientras menor sea la cantidad de luz (artificial o solar) mejor es la respuesta del obtenida. Point Cloud Library se convierte en una opción idónea para el procesamiento de imágenes en 3D adquiridas con sensores infrarrojos como Asus Xtion Pro Live y Kinect, que provienen de la misma familia, ya que permite aprovechar al máximo los datos obtenidos en cada nube de puntos y manipular esta información de forma fácil y didáctica.
55 RECOMENDACIONES El sensor Asus debe mantenerse a una altura aproximada de 0.60 m a nivel del suelo, en lo posible bajo condiciones de luz no excesivas, y considerando los rangos de funcionamiento propios especificados para asegurar su adecuado funcionamiento y una respuesta correcta del algoritmo. Para que la salida del algoritmo sea confiable se deben evitarse movimientos bruscos del sensor ya que este está desarrollado para condiciones rangos específicos de análisis. El dispositivo no debe aplicarse para detección de objetos como vidrio o plásticos transparentes que lo semejan, ya que el vidrio puede ser atravesado fácilmente por la luz infrarroja (radiación térmica). El cristal normal sólo puede reflejar los rayos ultravioletas, mientras que la radiación térmica puede atravesarlo sin apenas obstáculos..
56 La configuración de Channel Audio es imprescindible para el adecuado funcionamiento del dispositivo, además los tiempos de retardo de la salida de audio afectan directamente al tiempo de respuesta del sistema. Considerar este proyecto como base para el desarrollo de otros proyectos de carácter similar basados en visión artificial como robots dentro de ambientes controlados pudiendo ser usados para evasión de obstáculos o detección de objetos específicos. BeagleBone Black presenta limitaciones para la conexión de varios dispositivos de USB, lo que imposibilita su uso para determinadas aplicaciones, se recomienda emplear una versión más avanzada como BeagleBoard XM en futuros trabajos de investigación.
57 GRACIAS
ESCUELA POLITÉCNICA DEL EJÉRCITO EXTENSIÓN LATACUNGA NANCY VELASCO
 ESCUELA POLITÉCNICA DEL EJÉRCITO EXTENSIÓN LATACUNGA NANCY VELASCO Desarrollo e implementación de un algoritmo para detección de objetos con tecnología Kinect Justificación Apoyo a personas no videntes
ESCUELA POLITÉCNICA DEL EJÉRCITO EXTENSIÓN LATACUNGA NANCY VELASCO Desarrollo e implementación de un algoritmo para detección de objetos con tecnología Kinect Justificación Apoyo a personas no videntes
DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA PARA DETECCIÓN DE VEHÍCULOS ROBADOS EN MOVIMIENTO, EMPLEANDO TECNOLOGÍA BEAGLEBONE, POR MEDIO DE SOFTWARE LIBRE.
 DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA PARA DETECCIÓN DE VEHÍCULOS ROBADOS EN MOVIMIENTO, EMPLEANDO TECNOLOGÍA BEAGLEBONE, POR MEDIO DE SOFTWARE LIBRE. Realizado por: Garzón Canchignia Roberto Carlos Pacheco
DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA PARA DETECCIÓN DE VEHÍCULOS ROBADOS EN MOVIMIENTO, EMPLEANDO TECNOLOGÍA BEAGLEBONE, POR MEDIO DE SOFTWARE LIBRE. Realizado por: Garzón Canchignia Roberto Carlos Pacheco
SISTEMA DE RECONOCIMIENTO DE PERSONAS POR SU FORMA DE CAMINAR, PARA EL REGISTRO DE ACCESO, UTILIZANDO PROCESAMIENTO DE VIDEO Y SOFTWARE LIBRE.
 SISTEMA DE RECONOCIMIENTO DE PERSONAS POR SU FORMA DE CAMINAR, PARA EL REGISTRO DE ACCESO, UTILIZANDO PROCESAMIENTO DE VIDEO Y SOFTWARE LIBRE. Realizado por: Verónica Patricia Cangui Terán Marcelo Stalin
SISTEMA DE RECONOCIMIENTO DE PERSONAS POR SU FORMA DE CAMINAR, PARA EL REGISTRO DE ACCESO, UTILIZANDO PROCESAMIENTO DE VIDEO Y SOFTWARE LIBRE. Realizado por: Verónica Patricia Cangui Terán Marcelo Stalin
DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA CARRERA DE INGENIERÍA EN ELECTRÓNICA E INSTRUMENTACIÓN AUTOR: WILLIAM LÓPEZ DIRECTOR: ING.
 DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA CARRERA DE INGENIERÍA EN ELECTRÓNICA E INSTRUMENTACIÓN TEMA: DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE REALIDAD VIRTUAL BASADO EN LA TECNOLOGÍA KINECT 2.0 PARA LA
DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA CARRERA DE INGENIERÍA EN ELECTRÓNICA E INSTRUMENTACIÓN TEMA: DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE REALIDAD VIRTUAL BASADO EN LA TECNOLOGÍA KINECT 2.0 PARA LA
DISEÑO Y CONSTRUCCIÓN DE UNA UNIDAD DE VIGILANCIA Y SEGURIDAD ROBÓTICA PARA ÁREAS RESTRINGIDAS DE LA ESCUELA TÉCNICA DE LA FUERZA AÉREA
 DISEÑO Y CONSTRUCCIÓN DE UNA UNIDAD DE VIGILANCIA Y SEGURIDAD ROBÓTICA PARA ÁREAS RESTRINGIDAS DE LA ESCUELA TÉCNICA DE LA FUERZA AÉREA INGENIERÍA MECATRÓNICA Autores: Diego Jerez Bunces Director: Ing.
DISEÑO Y CONSTRUCCIÓN DE UNA UNIDAD DE VIGILANCIA Y SEGURIDAD ROBÓTICA PARA ÁREAS RESTRINGIDAS DE LA ESCUELA TÉCNICA DE LA FUERZA AÉREA INGENIERÍA MECATRÓNICA Autores: Diego Jerez Bunces Director: Ing.
Tutor: Ing. Eddie Galarza. Autores: Juan Carlos Chiza Llambo Jimmy Fernando Vilatuña Espín
 DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA PARA LA GESTIÓN DE PARQUEADEROS DE LA UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L UTILIZANDO ALGORITMO SURF PROGRAMADO EN SOFTWARE LIBRE Autores: Juan Carlos Chiza Llambo
DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA PARA LA GESTIÓN DE PARQUEADEROS DE LA UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L UTILIZANDO ALGORITMO SURF PROGRAMADO EN SOFTWARE LIBRE Autores: Juan Carlos Chiza Llambo
TRABAJO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN MECATRÓNICA
 TRABAJO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN MECATRÓNICA DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE MEDICIÓN DE VELOCIDAD PARA VEHICULOS UTILIZANDO VISIÓN ARTIFICIAL IMPLEMENTADO
TRABAJO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN MECATRÓNICA DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE MEDICIÓN DE VELOCIDAD PARA VEHICULOS UTILIZANDO VISIÓN ARTIFICIAL IMPLEMENTADO
Procure no ser un hombre con éxito, sino un hombre con valores. Albert Einstein
 Procure no ser un hombre con éxito, sino un hombre con valores. Albert Einstein TEMA: DISEÑO Y CONSTRUCCIÓN DE UN ANDADOR INTELIGENTE PARA EL DESPLAZAMIENTO AUTÓNOMO DE LOS ADULTOS MAYORES CON VISIÓN REDUCIDA
Procure no ser un hombre con éxito, sino un hombre con valores. Albert Einstein TEMA: DISEÑO Y CONSTRUCCIÓN DE UN ANDADOR INTELIGENTE PARA EL DESPLAZAMIENTO AUTÓNOMO DE LOS ADULTOS MAYORES CON VISIÓN REDUCIDA
UNIVERSIDAD DE LAS FUERZAS ARMADAS-ESPE EXTENSIÓN LATACUNGA CARRERA DE INGENIERÍA ELECTRÓNICA E INSTRUMENTACIÓN
 UNIVERSIDAD DE LAS FUERZAS ARMADAS-ESPE EXTENSIÓN LATACUNGA CARRERA DE INGENIERÍA ELECTRÓNICA E INSTRUMENTACIÓN DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE MONITOREO DE TEMPERATURA CORPORAL Y AMBIENTAL APLICANDO
UNIVERSIDAD DE LAS FUERZAS ARMADAS-ESPE EXTENSIÓN LATACUNGA CARRERA DE INGENIERÍA ELECTRÓNICA E INSTRUMENTACIÓN DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE MONITOREO DE TEMPERATURA CORPORAL Y AMBIENTAL APLICANDO
CONCLUSIONES Y RECOMENDACIONES
 CAPITULO VI CONCLUSIONES Y RECOMENDACIONES BERTHA BAUTISTA OSCAR ROJAS 261 COMPROBACION DE LA HIPOTESIS HIPOTESIS: El desarrollo de una metodología de diseño e implementación de escenarios virtuales no
CAPITULO VI CONCLUSIONES Y RECOMENDACIONES BERTHA BAUTISTA OSCAR ROJAS 261 COMPROBACION DE LA HIPOTESIS HIPOTESIS: El desarrollo de una metodología de diseño e implementación de escenarios virtuales no
DISEÑO DE UN SISTEMA DE ADQUISICIÓN Y VISUALIZACIÓN DE DATOS BASADO EN LA PLATAFORMA DE SISTEMAS EMBEBIDOS RASPBERRY PI
 DISEÑO DE UN SISTEMA DE ADQUISICIÓN Y VISUALIZACIÓN DE DATOS BASADO EN LA PLATAFORMA DE SISTEMAS EMBEBIDOS RASPBERRY PI Jeysson Emilio Lima Guaqueta Pedro Leonardo Ospina Fuentes Tutor: Eduard Galvis Restrepo,
DISEÑO DE UN SISTEMA DE ADQUISICIÓN Y VISUALIZACIÓN DE DATOS BASADO EN LA PLATAFORMA DE SISTEMAS EMBEBIDOS RASPBERRY PI Jeysson Emilio Lima Guaqueta Pedro Leonardo Ospina Fuentes Tutor: Eduard Galvis Restrepo,
Tutor: Ing. Eddie Galarza. Autores: Edison Xavier Sánchez Quevedo Edison Saúl Gallardo Calvopiña
 DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE AUTENTIFICACIÓN CON RECONOCIMIENTO FACIAL MEDIANTE PROCESAMIENTO DE IMÁGENES CON LA UTILIZACIÓN DE SOFTWARE LIBRE Y TECNOLOGÍA RASPBERRY PI Autores: Edison Xavier
DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE AUTENTIFICACIÓN CON RECONOCIMIENTO FACIAL MEDIANTE PROCESAMIENTO DE IMÁGENES CON LA UTILIZACIÓN DE SOFTWARE LIBRE Y TECNOLOGÍA RASPBERRY PI Autores: Edison Xavier
SISTEMA ESCANER DE PIE CON TECNOLOGÍA 3D QUE PERMITA ANALIZAR LA HORMA DEL ZAPATO ADECUADO PARA LA ADAPTACIÓN ERGONÓMICA DEL DEPORTISTA.
 SISTEMA ESCANER DE PIE CON TECNOLOGÍA 3D QUE PERMITA ANALIZAR LA HORMA DEL ZAPATO ADECUADO PARA LA ADAPTACIÓN ERGONÓMICA DEL DEPORTISTA. Realizado por: Luis Andrés Tipán Guamán Danilo Raúl Toapanta Mora
SISTEMA ESCANER DE PIE CON TECNOLOGÍA 3D QUE PERMITA ANALIZAR LA HORMA DEL ZAPATO ADECUADO PARA LA ADAPTACIÓN ERGONÓMICA DEL DEPORTISTA. Realizado por: Luis Andrés Tipán Guamán Danilo Raúl Toapanta Mora
Diseño del sistema de audio virtual
 Capítulo 2 Diseño del sistema de audio virtual El objetivo del diseño es el de crear un sistema de audio 3D que genere sonidos virtuales en audífonos. Estos sonidos tienen que ser procesados en dos canales
Capítulo 2 Diseño del sistema de audio virtual El objetivo del diseño es el de crear un sistema de audio 3D que genere sonidos virtuales en audífonos. Estos sonidos tienen que ser procesados en dos canales
Revisado por: Director: Ing. Eddie Galarza. Realizado por: Luis Ernesto Caiza Andrango
 DISEÑO DE UNA APLICACIÓN INTERACTIVA QUE PERMITA ASISTIR AL CONDUCTOR EN EL RECONOCIMIENTO DE SEÑALES DE TRÁNSITO MEDIANTE PROCESAMIENTO DE IMÁGENES UTILIZANDO SOFTWARE LIBRE Y TECNOLOGÍA BEAGLEBONE. Realizado
DISEÑO DE UNA APLICACIÓN INTERACTIVA QUE PERMITA ASISTIR AL CONDUCTOR EN EL RECONOCIMIENTO DE SEÑALES DE TRÁNSITO MEDIANTE PROCESAMIENTO DE IMÁGENES UTILIZANDO SOFTWARE LIBRE Y TECNOLOGÍA BEAGLEBONE. Realizado
Proyecto de Graduacion: Integrantes:
 Proyecto de Graduacion: Modelamiento y programación de un juego de LEGOS en un entorno de Realidad Virtual. Integrantes: Freddy Alejandro Arboleda Moncayo Ricardo Patricio Laica Cornejo María Magdalena
Proyecto de Graduacion: Modelamiento y programación de un juego de LEGOS en un entorno de Realidad Virtual. Integrantes: Freddy Alejandro Arboleda Moncayo Ricardo Patricio Laica Cornejo María Magdalena
TRABAJO DE TITULACIÓN, PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN ELECTRÓNICA E INSTRUMENTACIÓN
 TRABAJO DE TITULACIÓN, PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN ELECTRÓNICA E INSTRUMENTACIÓN IMPLEMENTACIÓN DE UN SISTEMA TECNOLÓGICO MEDIANTE REALIDAD VIRTUAL, PARA LA REHABILITACIÓN DE PACIENTES
TRABAJO DE TITULACIÓN, PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN ELECTRÓNICA E INSTRUMENTACIÓN IMPLEMENTACIÓN DE UN SISTEMA TECNOLÓGICO MEDIANTE REALIDAD VIRTUAL, PARA LA REHABILITACIÓN DE PACIENTES
IMPLEMENTACIÓN DE UNA HERRAMIENTA VIRTUAL MEDIANTE UN DISPOSITIVO HÁPTICO PARA LA REHABILITACIÓN DE PACIENTES CON DAÑO CEREBRAL ADQUIRIDO.
 IMPLEMENTACIÓN DE UNA HERRAMIENTA VIRTUAL MEDIANTE UN DISPOSITIVO HÁPTICO PARA LA REHABILITACIÓN DE PACIENTES CON DAÑO CEREBRAL ADQUIRIDO. Realizado por: Andrés Daniel Acurio Santamaria Director: Ing.
IMPLEMENTACIÓN DE UNA HERRAMIENTA VIRTUAL MEDIANTE UN DISPOSITIVO HÁPTICO PARA LA REHABILITACIÓN DE PACIENTES CON DAÑO CEREBRAL ADQUIRIDO. Realizado por: Andrés Daniel Acurio Santamaria Director: Ing.
Los métodos de procesamientos de imágenes, no definen una forma cuantitativa para
 77 5.1 PRUEBAS Y CONCLUSIONES Los métodos de procesamientos de imágenes, no definen una forma cuantitativa para establecer un nivel de procesamiento, debido a que son métodos apreciativos a quien los diseña.
77 5.1 PRUEBAS Y CONCLUSIONES Los métodos de procesamientos de imágenes, no definen una forma cuantitativa para establecer un nivel de procesamiento, debido a que son métodos apreciativos a quien los diseña.
Elección n de ruta y ajuste de velocidad en robots con ruedas dependiendo de la rugosidad de la superficie de navegación
 CENTRO DE INVESTIGACION Y DE ESTUDIOS AVANZADOS Elección n de ruta y ajuste de velocidad en robots con ruedas dependiendo de la rugosidad de la superficie de navegación Alumno: Farid García a Lamont Asesor:
CENTRO DE INVESTIGACION Y DE ESTUDIOS AVANZADOS Elección n de ruta y ajuste de velocidad en robots con ruedas dependiendo de la rugosidad de la superficie de navegación Alumno: Farid García a Lamont Asesor:
Mark like a Professional. Marcadora de sobremesa NetMarker
 Mark like a Professional Marcadora de sobremesa NetMarker Mark like a Professional NetMarker El sistema compacto de marcado La innovadora NetMarker, es ahora compatible con los sistemas de comunicación
Mark like a Professional Marcadora de sobremesa NetMarker Mark like a Professional NetMarker El sistema compacto de marcado La innovadora NetMarker, es ahora compatible con los sistemas de comunicación
Documento de Requisitos. Estacionamiento Inteligente
 Documento de Requisitos de Estacionamiento Inteligente Fecha 06/07/2012 Versión 0.2 Integrantes del grupo Francisco Becker Eduardo Castillo Víctor Fernández Ignacio Gómez Prefacio Este es el Documento
Documento de Requisitos de Estacionamiento Inteligente Fecha 06/07/2012 Versión 0.2 Integrantes del grupo Francisco Becker Eduardo Castillo Víctor Fernández Ignacio Gómez Prefacio Este es el Documento
UNIVERSIDAD NACIONAL EXPERIMENTAL POLITÉCNICA ANTONIO JOSÉ DE SUCRE Laboratorio de Alta Tensión. Dra. María Carolina Blanco, Venezuela
 UNIVERSIDAD NACIONAL EXPERIMENTAL POLITÉCNICA ANTONIO JOSÉ DE SUCRE Laboratorio de Alta Tensión Dra. María Carolina Blanco, Venezuela CÁMARA DE NIEBLA MANTENIMIENTO EN LA INDUSTRIA ELÉCTRICA Introducción
UNIVERSIDAD NACIONAL EXPERIMENTAL POLITÉCNICA ANTONIO JOSÉ DE SUCRE Laboratorio de Alta Tensión Dra. María Carolina Blanco, Venezuela CÁMARA DE NIEBLA MANTENIMIENTO EN LA INDUSTRIA ELÉCTRICA Introducción
RECONSTRUCCIÓN TRIDIMENSIONAL DE ZONAS DE INTERÉS: EVALUACIÓN DE RGB-D SLAM
 RECONSTRUCCIÓN TRIDIMENSIONAL DE ZONAS DE INTERÉS: EVALUACIÓN DE RGB-D SLAM PENNA-SALCEDO, Jhonny CARDENAS-QUIROGA, Adriana SIABATO, Willington ALONSO-ZÁRATE, Karen Lorena INTRODUCCIÓN En los últimos años,
RECONSTRUCCIÓN TRIDIMENSIONAL DE ZONAS DE INTERÉS: EVALUACIÓN DE RGB-D SLAM PENNA-SALCEDO, Jhonny CARDENAS-QUIROGA, Adriana SIABATO, Willington ALONSO-ZÁRATE, Karen Lorena INTRODUCCIÓN En los últimos años,
Universidad Nacional de Rosario Facultad de Ciencias Exactas, Ingeniería y Agrimensura Escuela de Ingeniería Electrónica INFORMÁTICA ELECTRÓNICA
 Universidad Nacional de Rosario Facultad de Ciencias Exactas, Ingeniería y Agrimensura Escuela de Ingeniería Electrónica INFORMÁTICA ELECTRÓNICA Escuela de Ingeniería Electrónica Departamento de Sistemas
Universidad Nacional de Rosario Facultad de Ciencias Exactas, Ingeniería y Agrimensura Escuela de Ingeniería Electrónica INFORMÁTICA ELECTRÓNICA Escuela de Ingeniería Electrónica Departamento de Sistemas
Guía de Robótica LEGO MINDSTORMS NXT
 Guía de Robótica LEGO MINDSTORMS NXT Introducción La realización de proyectos de robótica otorga al estudiante la capacidad de aprender importantes conocimiento a través de la construcción, programación
Guía de Robótica LEGO MINDSTORMS NXT Introducción La realización de proyectos de robótica otorga al estudiante la capacidad de aprender importantes conocimiento a través de la construcción, programación
Tema 11: Instrumentación virtual. M. en C. Edgardo Adrián Franco Martínez edgardoadrianfrancom
 Tema 11: virtual M. en C. Edgardo Adrián Franco Martínez http://www.eafranco.com edfrancom@ipn.mx @edfrancom edgardoadrianfrancom 1 Contenido Introducción Virtual Tradicional vs Virtual Componentes de
Tema 11: virtual M. en C. Edgardo Adrián Franco Martínez http://www.eafranco.com edfrancom@ipn.mx @edfrancom edgardoadrianfrancom 1 Contenido Introducción Virtual Tradicional vs Virtual Componentes de
Motherboard. Daniel Rúa Madrid
 Motherboard Daniel Rúa Madrid Qué es? La Motherboard es la placa principal de circuitos impresos y contiene los buses, que permiten que los datos sean transportados entre los diferentes componentes de
Motherboard Daniel Rúa Madrid Qué es? La Motherboard es la placa principal de circuitos impresos y contiene los buses, que permiten que los datos sean transportados entre los diferentes componentes de
Índice de Contenidos
 Índice de Contenidos Capítulo 1 INTRODUCCIÓN... 13 1.1 Objetivo General... 14 1.2 Objetivos específicos... 14 1.3 Origen y contexto de este trabajo... 15 1.4 Desarrollo y alcances... 17 1.5 Limitaciones...
Índice de Contenidos Capítulo 1 INTRODUCCIÓN... 13 1.1 Objetivo General... 14 1.2 Objetivos específicos... 14 1.3 Origen y contexto de este trabajo... 15 1.4 Desarrollo y alcances... 17 1.5 Limitaciones...
ANÁLISIS DE SISTEMAS. Prof. Eliz Mora
 ANÁLISIS DE SISTEMAS Prof. Eliz Mora Programa Fundamentos del Análisis de Sistemas Estilos Organizacionales y su impacto en los Sistemas de Información Rol del Analista de Sistema Determinación de Factibilidad
ANÁLISIS DE SISTEMAS Prof. Eliz Mora Programa Fundamentos del Análisis de Sistemas Estilos Organizacionales y su impacto en los Sistemas de Información Rol del Analista de Sistema Determinación de Factibilidad
ODROID-C2: MINI COMPUTADORA ODROID VERSION C2 CON DISIPADOR
 ODROID-C2: MINI COMPUTADORA ODROID VERSION C2 CON DISIPADOR Descripción El ODROID-C2 es una computadora de cuatro núcleos (SBC) de 64 bits. Algunos de los sistemas operativos que se ejecutan en este ordenador
ODROID-C2: MINI COMPUTADORA ODROID VERSION C2 CON DISIPADOR Descripción El ODROID-C2 es una computadora de cuatro núcleos (SBC) de 64 bits. Algunos de los sistemas operativos que se ejecutan en este ordenador
Sistemas LIDAR embarcados en drones TerraSystem-LidarPod enero 2018
 Sistemas LIDAR embarcados en drones TerraSystem-LidarPod Índice 1. Características de los sensores LIDAR Sistema TerraSystem-LidarPod 2. Parámetros de influencia en la precisión del sistema LIDAR TerraSystem-LidarPod
Sistemas LIDAR embarcados en drones TerraSystem-LidarPod Índice 1. Características de los sensores LIDAR Sistema TerraSystem-LidarPod 2. Parámetros de influencia en la precisión del sistema LIDAR TerraSystem-LidarPod
5.2. Análisis y diseño de interfaces gráficas para el Wiimote.
 5.2. Análisis y diseño de interfaces gráficas para el Wiimote. Wiimote API 5.2.1. Análisis de la aplicación GlovePIE para programación de Wiimote. Para conocer los avances en la programación del Wiimote
5.2. Análisis y diseño de interfaces gráficas para el Wiimote. Wiimote API 5.2.1. Análisis de la aplicación GlovePIE para programación de Wiimote. Para conocer los avances en la programación del Wiimote
SERIES DE ESTACION TOTAL
 SERIES DE ESTACION TOTAL Ventajas Pantalla Larga, Instalado Windows CE.Net Es Una Nueva Generación de Estaciones Totales Auto-desarrolladas por SOUTH, La Serie NTS-960 realiza la automatización y informatización,
SERIES DE ESTACION TOTAL Ventajas Pantalla Larga, Instalado Windows CE.Net Es Una Nueva Generación de Estaciones Totales Auto-desarrolladas por SOUTH, La Serie NTS-960 realiza la automatización y informatización,
Henry Salvador Taco Bonilla Karla Sophia Torres Barriga. DIRECTORA: Ing. Patricia Constante
 DISEÑO E IMPLEMENTACIÓN DE UN EQUIPO DE REHABILITACIÓN PARA EL FORTALECIMIENTO POSTRAUMÁTICO DEL TOBILLO MEDIANTE LA APLICACIÓN DE MOVIMIENTOS DE CIRCUNDUCCIÓN CONTROLADOS POR UN SISTEMA MÓVIL AUTORES:
DISEÑO E IMPLEMENTACIÓN DE UN EQUIPO DE REHABILITACIÓN PARA EL FORTALECIMIENTO POSTRAUMÁTICO DEL TOBILLO MEDIANTE LA APLICACIÓN DE MOVIMIENTOS DE CIRCUNDUCCIÓN CONTROLADOS POR UN SISTEMA MÓVIL AUTORES:
T E S I N A D E S E M I N A R I O D E G R A D U AC I O N : I N T E G R A N T E S :
 T E S I N A D E S E M I N A R I O D E G R A D U AC I O N : I N T E G R A N T E S : ANTECEDENDES INTERFAZ: Q u é e s? : Es la conexión entre dos ordenadores o máquinas de cualquier tipo dando una comunicación
T E S I N A D E S E M I N A R I O D E G R A D U AC I O N : I N T E G R A N T E S : ANTECEDENDES INTERFAZ: Q u é e s? : Es la conexión entre dos ordenadores o máquinas de cualquier tipo dando una comunicación
TRABAJO DE TITULACIÓN, PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN ELECTRÓNICA E INSTRUMENTACIÓN
 DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA CON INTERACCIÓN GESTUAL PARA LA ENSEÑANZA DE LENGUAJE DE SEÑAS BÁSICO ECUATORIANO A NIÑOS CON DISCAPACIDAD AUDITIVA MEDIANTE SENSORES GESTUALES TRABAJO DE TITULACIÓN,
DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA CON INTERACCIÓN GESTUAL PARA LA ENSEÑANZA DE LENGUAJE DE SEÑAS BÁSICO ECUATORIANO A NIÑOS CON DISCAPACIDAD AUDITIVA MEDIANTE SENSORES GESTUALES TRABAJO DE TITULACIÓN,
Sistema Portable de Fotomulta Speed Trap
 Sistema Portable de Fotomulta Speed Trap Información General Marzo 2017 www.trafficlogix.com.mx 1 Tecnología Sobresaliente Detección simultanea de múltiples vehículos Identificación del vehículo infractor
Sistema Portable de Fotomulta Speed Trap Información General Marzo 2017 www.trafficlogix.com.mx 1 Tecnología Sobresaliente Detección simultanea de múltiples vehículos Identificación del vehículo infractor
Instalación de Cámaras Perimetrales
 Instalación de Cámaras Perimetrales Objetivo General Requerimiento Se requiere la instalación de un sistema el cual permita vigilar todo el perímetro del condóminio. Propuesta de la solución En general
Instalación de Cámaras Perimetrales Objetivo General Requerimiento Se requiere la instalación de un sistema el cual permita vigilar todo el perímetro del condóminio. Propuesta de la solución En general
CAPÍTULO 6 PRUEBAS Y RESULTADOS
 CAPÍTULO 6 PRUEBAS Y RESULTADOS 6.1 Pruebas y Resultados Las pruebas que se generaron fueron tomando en cuenta tres parámetros importantes. El primero, la hora del día, ya que se ven afectados los resultados
CAPÍTULO 6 PRUEBAS Y RESULTADOS 6.1 Pruebas y Resultados Las pruebas que se generaron fueron tomando en cuenta tres parámetros importantes. El primero, la hora del día, ya que se ven afectados los resultados
MANUAL DE USUARIO ZEBRA ELECTRÓNICA SOFTWARE CONTROL DE ASISTENCIA Y TIEMPOS SCAT REMOTO CON USB.
 MANUAL DE USUARIO SOFTWARE CONTROL DE ASISTENCIA Y TIEMPOS SCAT REMOTO CON USB ZEBRA ELECTRÓNICA 2 ÍNDICE MANUAL DE USUARIO SOFTWARE CONTROL DE ASISTENCIA Y TIEMPOS SCAT REMOTO CON LECTOR BIOMÉTRICO USB
MANUAL DE USUARIO SOFTWARE CONTROL DE ASISTENCIA Y TIEMPOS SCAT REMOTO CON USB ZEBRA ELECTRÓNICA 2 ÍNDICE MANUAL DE USUARIO SOFTWARE CONTROL DE ASISTENCIA Y TIEMPOS SCAT REMOTO CON LECTOR BIOMÉTRICO USB
PROTOTIPO DE SISTEMA DE CALIBRACIÓN AUTOMÁTICA DE MEDIDORES DE AGUA RESIDENCIALES MEDIANTE VISIÓN ARTIFICIAL
 PROTOTIPO DE SISTEMA DE CALIBRACIÓN AUTOMÁTICA DE MEDIDORES DE AGUA RESIDENCIALES MEDIANTE VISIÓN ARTIFICIAL Director: Ing. Edwin Pruna Integrantes: Carlos Iván Bustamante Duque Miguel Dario Escudero Vásconez
PROTOTIPO DE SISTEMA DE CALIBRACIÓN AUTOMÁTICA DE MEDIDORES DE AGUA RESIDENCIALES MEDIANTE VISIÓN ARTIFICIAL Director: Ing. Edwin Pruna Integrantes: Carlos Iván Bustamante Duque Miguel Dario Escudero Vásconez
DIDÁCTICA DE TEMPERATURA
 DISEÑO E IMPLEMENTACIÓN DE UN CONTROL DIFUSO PARA UNA ESTACIÓN DIDÁCTICA DE TEMPERATURA Universidad Tecnológica de Pereira Facultad de Tecnologías Presentado por: Carlos Andrés Murillo Montaño Jorge Hernán
DISEÑO E IMPLEMENTACIÓN DE UN CONTROL DIFUSO PARA UNA ESTACIÓN DIDÁCTICA DE TEMPERATURA Universidad Tecnológica de Pereira Facultad de Tecnologías Presentado por: Carlos Andrés Murillo Montaño Jorge Hernán
TECNOLOGÍAS DE INFORMACIÓN Y COMUNICACIÓN
 TECNOLOGÍAS DE INFORMACIÓN Y COMUNICACIÓN Sesión 2: Introducción a las tecnologías de información y comunicación parte 2: Componentes de un sistema de cómputo. Sistema de Cómputo Un sistema de cómputo
TECNOLOGÍAS DE INFORMACIÓN Y COMUNICACIÓN Sesión 2: Introducción a las tecnologías de información y comunicación parte 2: Componentes de un sistema de cómputo. Sistema de Cómputo Un sistema de cómputo
Solución de vigilancia perimetral basada en fibra óptica para protección de perímetros vallados. LEOPARD PERIMETER Leopard-valla FR C
 Solución de vigilancia perimetral basada en fibra óptica para protección de perímetros vallados. LEOPARD PERIMETER Leopardvalla FR 60019259C Leopard es un sistema de seguridad orientado a sensibilizar
Solución de vigilancia perimetral basada en fibra óptica para protección de perímetros vallados. LEOPARD PERIMETER Leopardvalla FR 60019259C Leopard es un sistema de seguridad orientado a sensibilizar
QUE ES UNA PC? Software y Hardware
 QUE ES UNA PC? PC son las siglas en inglés de Personal Computer, que traducido significa Computadora Personal. Básicamente cualquier tipo de computadora realiza operaciones de procesamiento de datos, exponiéndolos
QUE ES UNA PC? PC son las siglas en inglés de Personal Computer, que traducido significa Computadora Personal. Básicamente cualquier tipo de computadora realiza operaciones de procesamiento de datos, exponiéndolos
AEROSOL MONITOR MODELO 8533/8534/8533E
 AEROSOL MONITOR MODELO 8533/8534/8533E MONITOR DE AEROSOLES DUSTTRAK DRX MODELOS 8533, 8533EP Y 8534 MONITORIZACIÓN DE AEROSOL Y POLVO A TIEMPO REAL PARA CUALQUIER ENTORNO Y APLICACIÓN Sólo el monitor
AEROSOL MONITOR MODELO 8533/8534/8533E MONITOR DE AEROSOLES DUSTTRAK DRX MODELOS 8533, 8533EP Y 8534 MONITORIZACIÓN DE AEROSOL Y POLVO A TIEMPO REAL PARA CUALQUIER ENTORNO Y APLICACIÓN Sólo el monitor
Tema 1.- Introducción a la Visión Artificial
 Tema 1.- Introducción a la Visión Artificial Visión Artificial Avanzada Prof. Dr. Nicolás Luis Fernández García Departamento de Informática y Análisis Numérico Universidad de Córdoba Universidad de Córdoba
Tema 1.- Introducción a la Visión Artificial Visión Artificial Avanzada Prof. Dr. Nicolás Luis Fernández García Departamento de Informática y Análisis Numérico Universidad de Córdoba Universidad de Córdoba
Diseño e implementación de un sistema para digitalización de objetos en 3D mediante el uso de Matlab
 1 Diseño e implementación de un sistema para digitalización de objetos en 3D mediante el uso de Matlab Andrés Sosa, Klever Guamán Departamento de Eléctrica y Electrónica, Universidad de las fuerzas armadas
1 Diseño e implementación de un sistema para digitalización de objetos en 3D mediante el uso de Matlab Andrés Sosa, Klever Guamán Departamento de Eléctrica y Electrónica, Universidad de las fuerzas armadas
UltraTips. Métodos de medición en la Inspección Visual Remota
 Métodos de medición en la Inspección Visual Remota La Inspección Visual fue el primer método de Pruebas no Destructivas empleado por el hombre. Hoy en día, la Inspección Visual es uno de los principales
Métodos de medición en la Inspección Visual Remota La Inspección Visual fue el primer método de Pruebas no Destructivas empleado por el hombre. Hoy en día, la Inspección Visual es uno de los principales
CAPÍTULO 1. pueden llegar y estos robots llegarían a realizar ese trabajo con el solo hecho
 CAPÍTULO 1 1 Descripción del Proyecto. 1.1 Antecedentes El avance tecnológico cada día es más vertiginoso en toda área de la electrónica, y somos testigos de que día tras día surgen nuevos dispositivos
CAPÍTULO 1 1 Descripción del Proyecto. 1.1 Antecedentes El avance tecnológico cada día es más vertiginoso en toda área de la electrónica, y somos testigos de que día tras día surgen nuevos dispositivos
Swing Gate G, E Swing Gate M Swing Gate SF
 DOCUMENTO ORIGINAL Ficha Técnica SWING GATE 1 - DESCRIPCIÓN Swing Gate G, E Swing Gate M Swing Gate SF Swing Gate FLAP Swing Gate 2FLAP i Portillos Batientes motorizados especialmente diseñados para facilitar
DOCUMENTO ORIGINAL Ficha Técnica SWING GATE 1 - DESCRIPCIÓN Swing Gate G, E Swing Gate M Swing Gate SF Swing Gate FLAP Swing Gate 2FLAP i Portillos Batientes motorizados especialmente diseñados para facilitar
EL SISTEMA TÁCTIL MÁS VERSÁTIL Y ECONÓMICO DEL MERCADO
 1 INTRODUCCIÓN EL SISTEMA TÁCTIL MÁS VERSÁTIL Y ECONÓMICO DEL MERCADO INTGLASS es un interface o dispositivo de ordenador que controla hasta 16 SENSORES. Éstos se adhieren sobre la superficie de cualquier
1 INTRODUCCIÓN EL SISTEMA TÁCTIL MÁS VERSÁTIL Y ECONÓMICO DEL MERCADO INTGLASS es un interface o dispositivo de ordenador que controla hasta 16 SENSORES. Éstos se adhieren sobre la superficie de cualquier
ESCÁNER INTRAORAL CS 3600 EXPLORE DE FORMA MÁS INTELIGENTE MÁS FÁCIL. MÁS RÁPIDO. ABIERTO.*
 ESCÁNER INTRAORAL CS 3600 EXPLORE DE FORMA MÁS INTELIGENTE MÁS FÁCIL. MÁS RÁPIDO. ABIERTO.* EXPLORAR DISEÑAR FRESAR UN ESCÁNER MÁS RÁPIDO, MÁS INTELIGENTE, MÁS EFICIENTE Exploración continua de alta velocidad:
ESCÁNER INTRAORAL CS 3600 EXPLORE DE FORMA MÁS INTELIGENTE MÁS FÁCIL. MÁS RÁPIDO. ABIERTO.* EXPLORAR DISEÑAR FRESAR UN ESCÁNER MÁS RÁPIDO, MÁS INTELIGENTE, MÁS EFICIENTE Exploración continua de alta velocidad:
SDR: equipos de radio definidos por software Una introducción
 SDR: equipos de radio definidos por software Una introducción MercaHam Mayo de 2009 Sergio Manrique, EA3DU 21.218.00 EQUIPO DE RADIO CONVENCIONAL 21.218.00 Programa SDR EQUIPO DE RADIO SDR Una definición
SDR: equipos de radio definidos por software Una introducción MercaHam Mayo de 2009 Sergio Manrique, EA3DU 21.218.00 EQUIPO DE RADIO CONVENCIONAL 21.218.00 Programa SDR EQUIPO DE RADIO SDR Una definición
LEGO MINDSTORMS Education
 LEGO MINDSTORMS Education Hay un nuevo robot en la Clase Con LEGO MINDSTORMS Education tu mayor reto será que tus estudiantes salgan del salón de clases! La versión más nueva está aquí! EV3 de LEGO MINDSTORMS
LEGO MINDSTORMS Education Hay un nuevo robot en la Clase Con LEGO MINDSTORMS Education tu mayor reto será que tus estudiantes salgan del salón de clases! La versión más nueva está aquí! EV3 de LEGO MINDSTORMS
A G S R O N. COMERCIALIZACIÓN Y SERVICIOS Las Higueras - Río Cuarto, Cba. SALÓN SHOWROOM Y VENTAS Vélez Sarsfield Río Cuarto, Cba.
 I A R R A G P U R I S R O N H E Iparraguirre Hnos. es una empresa lider en la República Argentina con marcado crecimiento y desarrollo en el mercado, nos acompañan más de 15 años de trayectoria con el
I A R R A G P U R I S R O N H E Iparraguirre Hnos. es una empresa lider en la República Argentina con marcado crecimiento y desarrollo en el mercado, nos acompañan más de 15 años de trayectoria con el
MANUAL DE USUARIO ZEBRA ELECTRÓNICA SOFTWARE DE REGISTRO DE ENTRADA Y SALIDA CON LECTOR BIOMÉTRICO USB.
 MANUAL DE USUARIO SOFTWARE DE REGISTRO DE ENTRADA Y SALIDA CON LECTOR BIOMÉTRICO USB ZEBRA ELECTRÓNICA 2 ÍNDICE MANUAL DE USUARIO SOFTWARE DE REGISTRO DE ENTRADA Y SALIDA CON LECTOR BIOMÉTRICO USB Pág.
MANUAL DE USUARIO SOFTWARE DE REGISTRO DE ENTRADA Y SALIDA CON LECTOR BIOMÉTRICO USB ZEBRA ELECTRÓNICA 2 ÍNDICE MANUAL DE USUARIO SOFTWARE DE REGISTRO DE ENTRADA Y SALIDA CON LECTOR BIOMÉTRICO USB Pág.
Gestión de parking. Reconocimiento de matrículas. Descripción FUNCIONAL. Flexibilidad
 Gestión de parking zeit.software/seguridad-ssgg/reconocimiento-de-matriculas/ Reconocimiento de matrículas Descripción FUNCIONAL Actualmente los sistemas de reconocimiento de matrículas han cobrado una
Gestión de parking zeit.software/seguridad-ssgg/reconocimiento-de-matriculas/ Reconocimiento de matrículas Descripción FUNCIONAL Actualmente los sistemas de reconocimiento de matrículas han cobrado una
TABLA DE CONTENIDOS. Dedicatoria. Agradecimientos. Tabla de Contenidos. Índice de Figuras. Índice de Tablas
 TABLA DE CONTENIDOS Dedicatoria Agradecimientos Tabla de Contenidos Índice de Figuras Índice de Tablas I II III VI VII 1. Primer Capítulo 8 1.1. Descripción del contexto............................. 8
TABLA DE CONTENIDOS Dedicatoria Agradecimientos Tabla de Contenidos Índice de Figuras Índice de Tablas I II III VI VII 1. Primer Capítulo 8 1.1. Descripción del contexto............................. 8
Guía Rápida. Terminal de Asistencia con Pantalla Touch de 4.3 pulgadas y Reconocimiento Facial. Versión:1.0 TL400
 Guía Rápida Terminal de Asistencia con Pantalla Touch de 4.3 pulgadas y Reconocimiento Facial. Versión:1.0 TL400 A 1. Descripción General Terminal de Huella Digital y Reconocimiento Facial Terminal de
Guía Rápida Terminal de Asistencia con Pantalla Touch de 4.3 pulgadas y Reconocimiento Facial. Versión:1.0 TL400 A 1. Descripción General Terminal de Huella Digital y Reconocimiento Facial Terminal de
INTRODUCCIÓN. nuestra vida diaria. En sus inicios el procesamiento de imágenes estaba restringido a
 1 INTRODUCCIÓN. El procesamiento digital de imágenes es un campo fascinante que forma parte de nuestra vida diaria. En sus inicios el procesamiento de imágenes estaba restringido a campos de investigación
1 INTRODUCCIÓN. El procesamiento digital de imágenes es un campo fascinante que forma parte de nuestra vida diaria. En sus inicios el procesamiento de imágenes estaba restringido a campos de investigación
Versión 2.2 año Desarrollado por: Bioing. Guillermo dos Santos Pereyra. Distribuido por: Khepri bioingeniería.
 BioGDGoniometría Digital Versión 2.2 año 2013. Desarrollado por: Bioing. Guillermo dos Santos Pereyra Distribuido por: Khepri bioingeniería PRESENTACIÓN El BioGD es un programa de goniometría digital sobre
BioGDGoniometría Digital Versión 2.2 año 2013. Desarrollado por: Bioing. Guillermo dos Santos Pereyra Distribuido por: Khepri bioingeniería PRESENTACIÓN El BioGD es un programa de goniometría digital sobre
DigivibeMX M10. Sistema de Balanceo para 1 y 2 planos. Ficha Técnica
 DigivibeMX M10 Sistema de Balanceo para 1 y 2 planos Ficha Técnica Un completo y funcional Sistema de Balanceo Dinámico Descripción del equipo Imagen para fines ilustrativos únicamente. La computadora
DigivibeMX M10 Sistema de Balanceo para 1 y 2 planos Ficha Técnica Un completo y funcional Sistema de Balanceo Dinámico Descripción del equipo Imagen para fines ilustrativos únicamente. La computadora
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE
 UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA TRABAJO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO ELECTROMECÁNICO TEMA: IMPLEMENTACIÓN DE UN SISTEMA DE
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA TRABAJO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO ELECTROMECÁNICO TEMA: IMPLEMENTACIÓN DE UN SISTEMA DE
La Computadora. Tipos de computadoras
 La Computadora Una computadora es una máquina con dispositivos electrónicos (y mecánicos) usada para procesar todo tipo de información, en función de las órdenes de un programa. Las computadoras son actualmente
La Computadora Una computadora es una máquina con dispositivos electrónicos (y mecánicos) usada para procesar todo tipo de información, en función de las órdenes de un programa. Las computadoras son actualmente
CBT-8000 MÁXIMA PRECISIÓN A BAJO COSTE CBT Equipo de Prueba de Interruptores.
 CBT-8000 MÁXIMA PRECISIÓN A BAJO COSTE Equipo de Prueba de Interruptores CBT-8000 Abrir, Cerrar, Abrir-Cerrar, Cerrar-Abrir y Abrir-Cerrar-Abrir. Tiempos de interruptores y relés (V disparo : 30-300V).
CBT-8000 MÁXIMA PRECISIÓN A BAJO COSTE Equipo de Prueba de Interruptores CBT-8000 Abrir, Cerrar, Abrir-Cerrar, Cerrar-Abrir y Abrir-Cerrar-Abrir. Tiempos de interruptores y relés (V disparo : 30-300V).
Se llama hardware a todos los dispositivos que forman la PC y que se puedan tocar, es decir, es todo el conjunto de accesorios que se le pueden
 Se llama hardware a todos los dispositivos que forman la PC y que se puedan tocar, es decir, es todo el conjunto de accesorios que se le pueden agregar a una computadora. Ejemplo: Monitor, Teclado, CPU,
Se llama hardware a todos los dispositivos que forman la PC y que se puedan tocar, es decir, es todo el conjunto de accesorios que se le pueden agregar a una computadora. Ejemplo: Monitor, Teclado, CPU,
UH7230. Base multipuerto Thunderbolt 3 con carga eléctrica
 UH7230 Base multipuerto Thunderbolt 3 con carga eléctrica Resolución de 5K o de 4K doble para multitarea con un uso intensivo de gráficos Combinando una experiencia visual de nueva generación realmente
UH7230 Base multipuerto Thunderbolt 3 con carga eléctrica Resolución de 5K o de 4K doble para multitarea con un uso intensivo de gráficos Combinando una experiencia visual de nueva generación realmente
Potente rendimiento de doble núcleo para los negocios de hoy y de mañana
 Potente rendimiento de doble núcleo Potente rendimiento de doble núcleo para los negocios de hoy y de mañana Con la inigualable nueva gama de portátiles Toshiba para la empresa que incluyen el procesador
Potente rendimiento de doble núcleo Potente rendimiento de doble núcleo para los negocios de hoy y de mañana Con la inigualable nueva gama de portátiles Toshiba para la empresa que incluyen el procesador
UNIVERSIDAD NACIONAL DE LOJA
 UNIVERSIDAD NACIONAL DE LOJA ÁREA DE ANERGÍA, LAS INDUSTRIASS Y LOS RECURSOS NATURALES NO RENOVABLES INGENIERÍA EN ELECTRÓNICA Y TELECOMUNICACIONES DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA AUTÓNOMO DISPENSADOR
UNIVERSIDAD NACIONAL DE LOJA ÁREA DE ANERGÍA, LAS INDUSTRIASS Y LOS RECURSOS NATURALES NO RENOVABLES INGENIERÍA EN ELECTRÓNICA Y TELECOMUNICACIONES DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA AUTÓNOMO DISPENSADOR
MS_10554 Developing Rich Internet Applications Using Microsoft Silverlight 4
 Developing Rich Internet Applications Using Microsoft Silverlight 4 www.ked.com.mx Av. Revolución No. 374 Col. San Pedro de los Pinos, C.P. 03800, México, D.F. Tel/Fax: 52785560 Introducción Este curso
Developing Rich Internet Applications Using Microsoft Silverlight 4 www.ked.com.mx Av. Revolución No. 374 Col. San Pedro de los Pinos, C.P. 03800, México, D.F. Tel/Fax: 52785560 Introducción Este curso
Sistemas LIDAR embarcados en drones TerraSystem-LidarPod
 Sistemas LIDAR embarcados en drones TerraSystem-LidarPod Índice 1. Características de los sensores LIDAR Sistema TerraSystem-LidarPod 2. Ventajas de los Sistemas LIDAR aerotransportados 3. Parámetros de
Sistemas LIDAR embarcados en drones TerraSystem-LidarPod Índice 1. Características de los sensores LIDAR Sistema TerraSystem-LidarPod 2. Ventajas de los Sistemas LIDAR aerotransportados 3. Parámetros de
UNIVERSIDAD NACIONAL DEL SANTA FACULTAD DE INGENIERÍA DEPARTAMENTO ACADÉMICO DE ENERGÍA Y FÍSICA INFORME DE INVESTIGACIÓN
 UNIVERSIDAD NACIONAL DEL SANTA FACULTAD DE INGENIERÍA DEPARTAMENTO ACADÉMICO DE ENERGÍA Y FÍSICA INFORME DE INVESTIGACIÓN Construcción de un instrumento virtual para medir la dirección del viento, utilizando
UNIVERSIDAD NACIONAL DEL SANTA FACULTAD DE INGENIERÍA DEPARTAMENTO ACADÉMICO DE ENERGÍA Y FÍSICA INFORME DE INVESTIGACIÓN Construcción de un instrumento virtual para medir la dirección del viento, utilizando
SIMULACIÓN DE UNA CALCULADORA DE MATEMÁTICA
 SIMULACIÓN DE UNA CALCULADORA DE MATEMÁTICA BÁSICA. INITE, S.C. no es responsable del contenido, de la veracidad de los datos, opiniones y acontecimientos vertidos en el presente caso práctico. La finalidad
SIMULACIÓN DE UNA CALCULADORA DE MATEMÁTICA BÁSICA. INITE, S.C. no es responsable del contenido, de la veracidad de los datos, opiniones y acontecimientos vertidos en el presente caso práctico. La finalidad
SpearHead Wi-Fi Surveillance Product Family
 Los productos de vigilancia Wi-Fi proporcionan capacidades de detección, recopilación y ubicación provenientes de cualquier dispositivo emisor de Wi-Fi. Nuestro Sistema combina la innovadora tecnología
Los productos de vigilancia Wi-Fi proporcionan capacidades de detección, recopilación y ubicación provenientes de cualquier dispositivo emisor de Wi-Fi. Nuestro Sistema combina la innovadora tecnología
Manual de usuario de PointWrite
 Manual de usuario de PointWrite Contenido Contenido del paquete... 3 Acople del PointWrite al proyector... 4 Conexión de PointWrite al PC... 5 Modos de actuación del lápiz... 5 Cambio del puntero del lápiz...5
Manual de usuario de PointWrite Contenido Contenido del paquete... 3 Acople del PointWrite al proyector... 4 Conexión de PointWrite al PC... 5 Modos de actuación del lápiz... 5 Cambio del puntero del lápiz...5
ProColor 862U. Características
 ProColor 862U Los estudiantes verán todo con la vibrante pantalla plana interactiva LCD Android ProColor de 86"de Boxlight. La tecnología táctil y la colaboración son traídos a la vida con el brillo de
ProColor 862U Los estudiantes verán todo con la vibrante pantalla plana interactiva LCD Android ProColor de 86"de Boxlight. La tecnología táctil y la colaboración son traídos a la vida con el brillo de
El primero en ofrecer Medición sobre imágenes con el zoom óptico
 El primero en ofrecer Medición sobre imágenes con el zoom óptico 12 Leica DISTO D810 touch La solución inteligente para medir y documentar Cumplimos nuestras promesas según ISO 16331-1 Precisión y alcance
El primero en ofrecer Medición sobre imágenes con el zoom óptico 12 Leica DISTO D810 touch La solución inteligente para medir y documentar Cumplimos nuestras promesas según ISO 16331-1 Precisión y alcance
WoodInspector Programa de inspección de postes de madera
 WoodInspector Programa de inspección de postes de madera IML WoodInspector IML WOODINSPECTOR ES UN MÓDULO DEL SOFTWARE PRO PARA LA SERIE DE EQUIPOS PD- TOOLS. ESTA APLICACIÓN POSEE FUNCIONES DE EVALUACIÓN
WoodInspector Programa de inspección de postes de madera IML WoodInspector IML WOODINSPECTOR ES UN MÓDULO DEL SOFTWARE PRO PARA LA SERIE DE EQUIPOS PD- TOOLS. ESTA APLICACIÓN POSEE FUNCIONES DE EVALUACIÓN
PHOENIX FL. Máquina de corte por láser de fibra LVDGROUP.COM CORTE POR LÁSER VERSÁTIL Y DINÁMICO
 Máquina de corte por láser de fibra PHOENIX FL CORTE POR LÁSER VERSÁTIL Y DINÁMICO LVDGROUP.COM PHOENIX FL CORTE POR LÁSER VERSÁTIL Y DINÁMICO El láser de fibra Phoenix combina la eficiencia de costes,
Máquina de corte por láser de fibra PHOENIX FL CORTE POR LÁSER VERSÁTIL Y DINÁMICO LVDGROUP.COM PHOENIX FL CORTE POR LÁSER VERSÁTIL Y DINÁMICO El láser de fibra Phoenix combina la eficiencia de costes,
La tecnología táctil y la colaboración son traídos a la vida con el brillo de nuestra pantalla LCD Android Ultra Alta Definición 4K
 ProColor 652 La tecnología táctil y la colaboración son traídos a la vida con el brillo de nuestra pantalla LCD Android Ultra Alta Definición 4K Características Hasta 20 usuarios con un solo toque cada
ProColor 652 La tecnología táctil y la colaboración son traídos a la vida con el brillo de nuestra pantalla LCD Android Ultra Alta Definición 4K Características Hasta 20 usuarios con un solo toque cada
Conalep Tehuacán. Operación de Circuitos Electrónicos Analógicos P.T.B. en SOMA. Introducción a la Automatización. Ing. Jonathan Quiroga Tinoco
 Pág. 1 Conalep Tehuacán Operación de Circuitos Electrónicos Analógicos P.T.B. en SOMA Introducción a la Automatización Ing. Jonathan Quiroga Tinoco www.zonaemec.tk Pág. 2 Automatización Es la tecnología
Pág. 1 Conalep Tehuacán Operación de Circuitos Electrónicos Analógicos P.T.B. en SOMA Introducción a la Automatización Ing. Jonathan Quiroga Tinoco www.zonaemec.tk Pág. 2 Automatización Es la tecnología
ESTÁNDARES PARA EQUIPOS DE CÓMPUTO Dirección de Normatividad y Evaluación Tecnológica Enero 2019
 Para efecto y uso de la NORMATIVIDAD EN MATERIA DE TECNOLOGÍAS DE LA INFORMACIÓN Y COMUNICACIÓN del periódico oficial de fecha 19 de Septiembre de 2014 para las Dependencias y Entidades de la Administración
Para efecto y uso de la NORMATIVIDAD EN MATERIA DE TECNOLOGÍAS DE LA INFORMACIÓN Y COMUNICACIÓN del periódico oficial de fecha 19 de Septiembre de 2014 para las Dependencias y Entidades de la Administración
SD20A Seminario de Diseño Sección 14. 1er Tutorial
 SD20A Seminario de Diseño Sección 14 1er Tutorial Tutorial de ENVI Parte 1 Familiarización con el manejo de imágenes en el programa Raúl Aguilera H. Sistema de captura, procesamiento y visualización de
SD20A Seminario de Diseño Sección 14 1er Tutorial Tutorial de ENVI Parte 1 Familiarización con el manejo de imágenes en el programa Raúl Aguilera H. Sistema de captura, procesamiento y visualización de
Matriz de Competencias THEME Mecatrónica con Competencias Parciales/ Unidades de Resultados de Aprendizaje
 AREAS DE COMPETENCIA PASOS DE DESARROLLO DE COMPETENCIAS 1. Mantenimiento y garantía de la fiabilidad de los sistemas realizar el mantenimiento programado básico de máquinas y sistemas y seguir los planes
AREAS DE COMPETENCIA PASOS DE DESARROLLO DE COMPETENCIAS 1. Mantenimiento y garantía de la fiabilidad de los sistemas realizar el mantenimiento programado básico de máquinas y sistemas y seguir los planes
Ejercicio de completar frases. Lee el texto y escribe la letra que contiene la palabra que tú
 COLEGIO DEL SANTO ANGEL DE LA GUARDA TALLER EVALUATIVO DE HARDWARE Y SOFTWARE ACTIVIDAD 1 Ejercicio de completar frases. Lee el texto y escribe la letra que contiene la palabra que tú a. Apagar e. Driver
COLEGIO DEL SANTO ANGEL DE LA GUARDA TALLER EVALUATIVO DE HARDWARE Y SOFTWARE ACTIVIDAD 1 Ejercicio de completar frases. Lee el texto y escribe la letra que contiene la palabra que tú a. Apagar e. Driver
OFERTAS DE TRABAJOS FIN DE GRADO
 Sistemas de detección y seguimiento preciso de la cara y partes del cuerpo Descripción: Se desarrollarán algoritmos para la detección de la cara y de distintas partes del cuerpo, que funcionen en tiempo
Sistemas de detección y seguimiento preciso de la cara y partes del cuerpo Descripción: Se desarrollarán algoritmos para la detección de la cara y de distintas partes del cuerpo, que funcionen en tiempo
3. Espacios de color. 3.Espacios de color. El uso del color en el procesamiento de imágenes está principalmente motivado por dos factores:
 3. Espacios de color El uso del color en el procesamiento de imágenes está principalmente motivado por dos factores: El color es un poderoso descriptor que, en la mayoría de los casos simplifica la identificación
3. Espacios de color El uso del color en el procesamiento de imágenes está principalmente motivado por dos factores: El color es un poderoso descriptor que, en la mayoría de los casos simplifica la identificación
Introducción a la Computación. Herramientas Informáticas. Omar Ernesto Cabrera Rosero Universidad de Nariño
 Introducción a la Computación Omar Ernesto Cabrera Rosero Universidad de Nariño 6 de Julio 2010 Esquema Terminología Informática 1 Terminología Informática Computación e Informática Dato e Información
Introducción a la Computación Omar Ernesto Cabrera Rosero Universidad de Nariño 6 de Julio 2010 Esquema Terminología Informática 1 Terminología Informática Computación e Informática Dato e Información
Procesamiento digital de audio
 PROCESAMIENTO DIGITAL DE SEÑALES Definición Es la rama de la ingeniería que se concentra en las operaciones o algoritmos matemáticos usados para representar, transformar y manipular en un ambiente de cómputo
PROCESAMIENTO DIGITAL DE SEÑALES Definición Es la rama de la ingeniería que se concentra en las operaciones o algoritmos matemáticos usados para representar, transformar y manipular en un ambiente de cómputo
ANX-PR/CL/ GUÍA DE APRENDIZAJE. ASIGNATURA Vision artificial. CURSO ACADÉMICO - SEMESTRE Segundo semestre
 ANX-PR/CL/001-01 GUÍA DE APRENDIZAJE ASIGNATURA Vision artificial CURSO ACADÉMICO - SEMESTRE 2016-17 - Segundo semestre GA_56AA_563000008_2S_2016-17 Datos Descriptivos Nombre de la Asignatura Titulación
ANX-PR/CL/001-01 GUÍA DE APRENDIZAJE ASIGNATURA Vision artificial CURSO ACADÉMICO - SEMESTRE 2016-17 - Segundo semestre GA_56AA_563000008_2S_2016-17 Datos Descriptivos Nombre de la Asignatura Titulación
1-Componentes Físicos y Lógicos de un Ordenador.
 1-Componentes Físicos y Lógicos de un Ordenador. En este capítulo trataremos de explicar el conjunto de elementos por lo que está compuesto un ordenador. A grandes rasgos un Ordenador Personal o PC ( Personal
1-Componentes Físicos y Lógicos de un Ordenador. En este capítulo trataremos de explicar el conjunto de elementos por lo que está compuesto un ordenador. A grandes rasgos un Ordenador Personal o PC ( Personal
Capítulo 6 Pruebas y Resultados
 Capítulo 6-64 - 6.1 Pruebas con cámara CCD. Se construyó una base provisional con el objetivo de mantener constante las condiciones del ambiente luminoso en el que se realizarían las pruebas. Figura 6.1
Capítulo 6-64 - 6.1 Pruebas con cámara CCD. Se construyó una base provisional con el objetivo de mantener constante las condiciones del ambiente luminoso en el que se realizarían las pruebas. Figura 6.1
SISTEMA DE ETIQUETAS ELECTRÓNICAS - ESL
 SISTEMA DE ETIQUETAS ELECTRÓNICAS - ESL WWW.HUBROX.COM SALES@HUBROX.COM HUBROX Technology Inc. ofrece la solución ESL (Electronic Shelf Label Solution) que permite la visualización de precios en las estanterías
SISTEMA DE ETIQUETAS ELECTRÓNICAS - ESL WWW.HUBROX.COM SALES@HUBROX.COM HUBROX Technology Inc. ofrece la solución ESL (Electronic Shelf Label Solution) que permite la visualización de precios en las estanterías
FREDDY FABIAN CUJI SANCHEZ
 DISEÑO E IMPLEMENTACIÓN DE UN MÓDULO DIDÁCTICO PARA EL MONITOREO Y CONTROL AUTOMÁTICO DE UN SISTEMA DE TEMPERATURA DE UN HORNO PARA EL LABORATORIO DE REDES INDUSTRIALES Y CONTROL DE PROCESOS DE LA ESCUELA
DISEÑO E IMPLEMENTACIÓN DE UN MÓDULO DIDÁCTICO PARA EL MONITOREO Y CONTROL AUTOMÁTICO DE UN SISTEMA DE TEMPERATURA DE UN HORNO PARA EL LABORATORIO DE REDES INDUSTRIALES Y CONTROL DE PROCESOS DE LA ESCUELA