RECONSTRUCCIÓN TRIDIMENSIONAL DE ZONAS DE INTERÉS: EVALUACIÓN DE RGB-D SLAM
|
|
|
- David Quiroga Soler
- hace 5 años
- Vistas:
Transcripción

1
2 RECONSTRUCCIÓN TRIDIMENSIONAL DE ZONAS DE INTERÉS: EVALUACIÓN DE RGB-D SLAM PENNA-SALCEDO, Jhonny CARDENAS-QUIROGA, Adriana SIABATO, Willington ALONSO-ZÁRATE, Karen Lorena
3 INTRODUCCIÓN En los últimos años, las reconstrucciones tridimensionales han tenido avances significativos en diferentes áreas del conocimiento, debido principalmente a la creciente necesidad de obtener modelos tridimensionales virtuales que representan zonas de interés en las que se requiere aplicar diversos análisis. La visualización y procesamiento de información de estas zonas exige el uso de algoritmos robustos que permitan el manejo de altos volúmenes de información que son normalmente obtenidos a través de dispositivos de captura de datos como cámaras y escáner láser. A pesar de que se trata de un proceso complejo e intrincado, los avances en visión computacional y dispositivos de captura de datos tridimensionales (sensores) han permitido que este procedimiento sea cada vez más flexible y preciso. Esto ha generado gran cantidad de enfoques y propuestas de reconstrucción tridimensional con las que se busca garantizar la calidad, disminuir la complejidad de uso y lograr reducción en los costos.
4 RGBD-SLAM Entrada: Captura de imágenes RGB-D Extracción de características (SURF) Estimación de la posición (RANSAC) Refinamiento de la Posición (ICP) Optimización del grafo de posición (HOGMAN) Salida: Modelo 3D (Nube de Puntos)

5 KINECT EMISOR IR SENSOR DE COLOR SENSOR IR PROFUNDIDAD MOTOR TILT MICRÓFONOS
6 METODOLOGÍA Diseño y construcción del banco de pruebas Captura de Datos Evaluación de Profundidad Evaluación Horizontal y Vertical Reconstrucci ones de Prueba y análisis

7 BANCO DE PRUEBAS El banco de pruebas consiste en una superficie de fondo, vertical de color blanco uniforme sobre la cual se colocan imágenes de prueba que consiste en cuadrículas de dimensiones conocida. El piso también blanco uniforme con una marcación de distancia en milímetros hasta la pared de fondo; esto permite que las imágenes capturadas estén libres de interferencias externas no deseadas.

8 CAPTURA DE DATOS Se capturan imágenes dentro del banco de pruebas a diferentes distancias y alturas del sensor. Las imágenes capturadas se agrupan en dos categorías, unas para realizar la evaluación de profundidad y las otras para evaluar las medidas horizontales y verticales.

9 EVALUACIÓN DE PROFUNDIDAD Filtro de área de interés: Debido a que se capturan nubes de puntos las cuales contienen en promedio puntos, se filtran las imágenes por área, de forma tal que sólo se consideran 1000 puntos en los que están contenidos las cuadrículas de prueba. Esto permite obtener un volumen menor de datos que facilitan los cálculos y eliminan zonas de la imagen que no contienen información. Posteriormente se calcula la media de los 1000 puntos de interés para obtener un promedio de la medición de profundidad del sensor. Con la media obtenida y la medida real se calcula el error porcentual Real (m) Sensor (m) Error %

10 EVALUACIÓN VERTICAL Y HORIZONTAL Filtro por área de interés Filtro de color Selección de puntos Medición de distancia


11 RECONSTRUCCIONES


12 RECONSTRUCCIONES
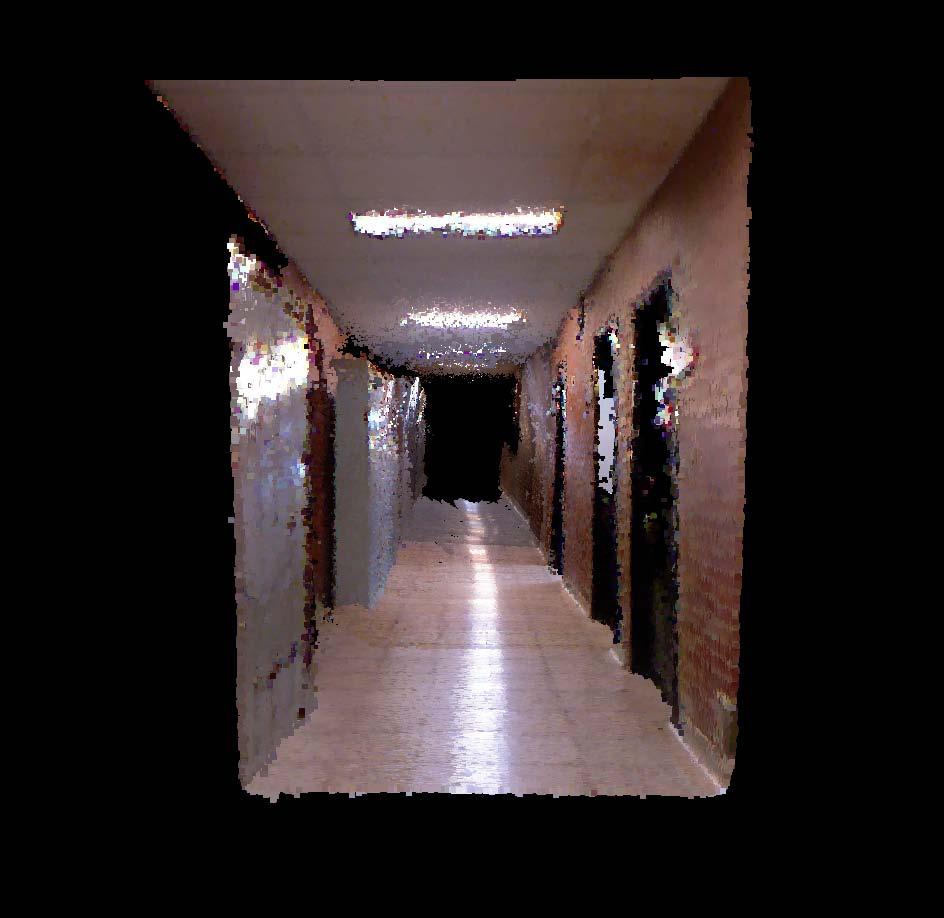

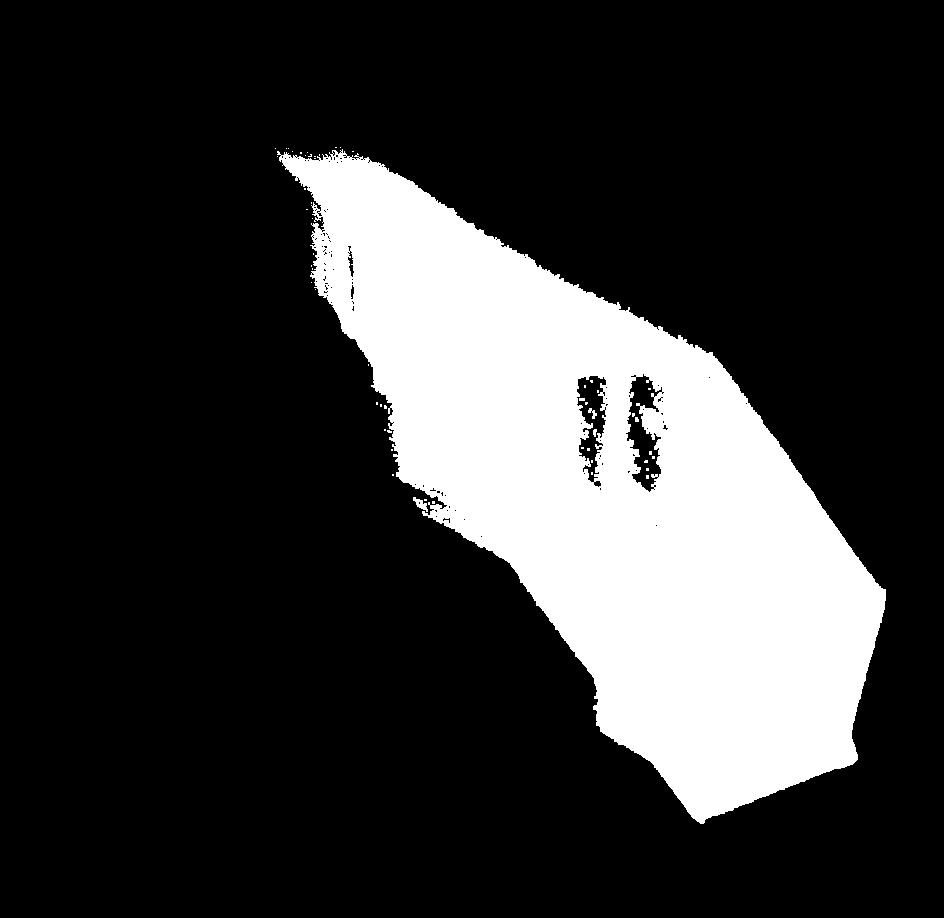
13 RECONSTRUCCIONES

14 RECONSTRUCCIONES

15 RECONSTRUCCIONES
16 CONCLUSIONES El sensor presenta un desempeño adecuado para capturar información en un rango de 0.7m a 3m de profundidad. El algoritmo presenta un alto porcentaje de error (hasta 27.6%) al reconstruir objetos pequeños, lo que lo hace poco confiable para realizar esta labor. Pero al realizar la reconstrucción a objetos de mayor tamaño el error disminuye considerablemente (hasta 0.9%). No reproduce los datos con precisión cartográfica, pero permite capturar entornos y escenarios de forma inmediata y entregar datos fáciles de procesar y con las calidades mínimas requeridas para solucionar problemas inmediatos en situaciones en las cuales variables como el presupuesto o la localización restringen el uso de sistemas de alta precisión cómo el LIDAR o métodos de escaneo tradicionales. El sistema de reconstrucción es rápido, económico y fácil de implementar.

17 GRACIAS
Reconstrucción tridimensional de zonas de interés: evaluación de RGB-D SLAM
 Reconstrucción tridimensional de zonas de interés: evaluación de RGB-D SLAM PENNA-SALCEDO, Jhonny; CÁRDENAS-QUIROGA, Adriana; SIABATO, Willington; ALONSO-ZÁRATE, Karen PALABRAS CLAVE Este trabajo presenta
Reconstrucción tridimensional de zonas de interés: evaluación de RGB-D SLAM PENNA-SALCEDO, Jhonny; CÁRDENAS-QUIROGA, Adriana; SIABATO, Willington; ALONSO-ZÁRATE, Karen PALABRAS CLAVE Este trabajo presenta
Memorias. La Geoinformación al Servicio de la Sociedad
 La Geoinformación al Servicio de la Sociedad Memorias Sociedad Latinoamericana en Percepción Remota y Sistemas de Información Espacial Capítulo Colombia Medellín, Colombia 29 de Septiembre al 3 de Octubre
La Geoinformación al Servicio de la Sociedad Memorias Sociedad Latinoamericana en Percepción Remota y Sistemas de Información Espacial Capítulo Colombia Medellín, Colombia 29 de Septiembre al 3 de Octubre
Diseño e implementación de un sistema para digitalización de objetos en 3D mediante el uso de Matlab
 1 Diseño e implementación de un sistema para digitalización de objetos en 3D mediante el uso de Matlab Andrés Sosa, Klever Guamán Departamento de Eléctrica y Electrónica, Universidad de las fuerzas armadas
1 Diseño e implementación de un sistema para digitalización de objetos en 3D mediante el uso de Matlab Andrés Sosa, Klever Guamán Departamento de Eléctrica y Electrónica, Universidad de las fuerzas armadas
Soluciones GIM Geomatics para Arqueología
 NUBES DE PUNTOS: Es el resultado del escaneo láser 3D, y consiste en un conjunto de vértices en un sistema de coordenadas tridimensional, que normalmente se definen mediante coordenadas X, Y y Z. Dicha
NUBES DE PUNTOS: Es el resultado del escaneo láser 3D, y consiste en un conjunto de vértices en un sistema de coordenadas tridimensional, que normalmente se definen mediante coordenadas X, Y y Z. Dicha
Soluciones GIM Geomatics para Arquitectura
 NUBES DE PUNTOS: Es el resultado del escaneo láser 3D, y consiste en un conjunto de vértices en un sistema de coordenadas tridimensional, que normalmente se definen mediante coordenadas X, Y y Z. Dicha
NUBES DE PUNTOS: Es el resultado del escaneo láser 3D, y consiste en un conjunto de vértices en un sistema de coordenadas tridimensional, que normalmente se definen mediante coordenadas X, Y y Z. Dicha
Trabajo Final Agrimensura 3D con tecnología LiDAR
 Trabajo Final Agrimensura 3D con tecnología LiDAR UNIVERSIDAD NACIONAL DE LA PLATA FACULTAD DE INGENIERIA DEPARTAMENTO DE AGRIMENSURA Ing. Agrimensora Sofia Falip Conceptos teóricos sobre LiDAR estático
Trabajo Final Agrimensura 3D con tecnología LiDAR UNIVERSIDAD NACIONAL DE LA PLATA FACULTAD DE INGENIERIA DEPARTAMENTO DE AGRIMENSURA Ing. Agrimensora Sofia Falip Conceptos teóricos sobre LiDAR estático
TECNOLOGIA DE ESCANER EN LASER 3D - HDS (Hight Definition Surveying
 TECNOLOGIA DE ESCANER EN LASER 3D - HDS (Hight Definition Surveying Calle 9 a 24 El Ingenio PH Ingenio Plaza 1ª. Tel 394 53 77 Panamá. Calle 48 A No. 70D 34 Tel. 4100189 4006550- Bogotá. D.C. EE.UU 6924
TECNOLOGIA DE ESCANER EN LASER 3D - HDS (Hight Definition Surveying Calle 9 a 24 El Ingenio PH Ingenio Plaza 1ª. Tel 394 53 77 Panamá. Calle 48 A No. 70D 34 Tel. 4100189 4006550- Bogotá. D.C. EE.UU 6924
MOBILE MAPPING E INVENTARIO INTERURBANO
 MOBILE MAPPING E INVENTARIO INTERURBANO Jose Manuel García García Ingenieria INSITU s.l. Calle Doctor Rafael de Vega, 12. 27002. Lugo +34 664 663 155 josemanuel.garcia@ingenieriainsitu.com PALABRAS CLAVE
MOBILE MAPPING E INVENTARIO INTERURBANO Jose Manuel García García Ingenieria INSITU s.l. Calle Doctor Rafael de Vega, 12. 27002. Lugo +34 664 663 155 josemanuel.garcia@ingenieriainsitu.com PALABRAS CLAVE
Obtención de modelos tridimensionales para ingeniería por medio de barredores lídar y de aeronaves no tripuladas
 Obtención de modelos tridimensionales para ingeniería por medio de barredores lídar y de aeronaves no tripuladas Armando Peralta Higuera Laboratorio de Análisis Geoespacial Instituto de Geografía, UNAM
Obtención de modelos tridimensionales para ingeniería por medio de barredores lídar y de aeronaves no tripuladas Armando Peralta Higuera Laboratorio de Análisis Geoespacial Instituto de Geografía, UNAM
DIPLOMADO INTELIGENCIA ARTIFICIAL con Aplicación en Robots Móviles FACULTAD DE INGENIERÍA 2018
 DIPLOMADO INTELIGENCIA ARTIFICIAL con Aplicación en Robots Móviles FACULTAD DE INGENIERÍA 2018 CONTENIDO Introducción Módulos Procedimiento de inscripción, Costos Fechas Importantes Dudas INTRODUCCIÓN
DIPLOMADO INTELIGENCIA ARTIFICIAL con Aplicación en Robots Móviles FACULTAD DE INGENIERÍA 2018 CONTENIDO Introducción Módulos Procedimiento de inscripción, Costos Fechas Importantes Dudas INTRODUCCIÓN
Visión artificial y Robótica. Depto. de Ciencia de la Computación e Inteligencia Artificial
 Visión artificial y Robótica Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Sensores 3D Métodos de registro 3D Iterative Closest Points Sensores 3D Permiten obtener la información
Visión artificial y Robótica Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Sensores 3D Métodos de registro 3D Iterative Closest Points Sensores 3D Permiten obtener la información
«Tecnología escáner láser: Captura de datos 3D»
 1er Encuentro Soluciones Tecnológicas BIM 12 de mayo 2016 «Tecnología escáner láser: Captura de datos 3D» David Santos - Geocom www.bimforum.cl 1er Encuentro de SOLUCIONES TECNOLÓGICAS BIM Tecnología Escáner
1er Encuentro Soluciones Tecnológicas BIM 12 de mayo 2016 «Tecnología escáner láser: Captura de datos 3D» David Santos - Geocom www.bimforum.cl 1er Encuentro de SOLUCIONES TECNOLÓGICAS BIM Tecnología Escáner
SISTEMA ESCANER DE PIE CON TECNOLOGÍA 3D QUE PERMITA ANALIZAR LA HORMA DEL ZAPATO ADECUADO PARA LA ADAPTACIÓN ERGONÓMICA DEL DEPORTISTA.
 SISTEMA ESCANER DE PIE CON TECNOLOGÍA 3D QUE PERMITA ANALIZAR LA HORMA DEL ZAPATO ADECUADO PARA LA ADAPTACIÓN ERGONÓMICA DEL DEPORTISTA. Realizado por: Luis Andrés Tipán Guamán Danilo Raúl Toapanta Mora
SISTEMA ESCANER DE PIE CON TECNOLOGÍA 3D QUE PERMITA ANALIZAR LA HORMA DEL ZAPATO ADECUADO PARA LA ADAPTACIÓN ERGONÓMICA DEL DEPORTISTA. Realizado por: Luis Andrés Tipán Guamán Danilo Raúl Toapanta Mora
Técnicas de autolocalización en 3D con visión monocular
 Técnicas de autolocalización en 3D con visión monocular Eduardo Perdices eperdices@gsyc.es Universidad Rey Juan Carlos 05 Abril 2016 Contenidos 1 Contenidos Introducción MonoSLAM PTAM SVO Futuro Próximo
Técnicas de autolocalización en 3D con visión monocular Eduardo Perdices eperdices@gsyc.es Universidad Rey Juan Carlos 05 Abril 2016 Contenidos 1 Contenidos Introducción MonoSLAM PTAM SVO Futuro Próximo
TECNOLOGÍA DE MEDICIÓN AS-BUILT
 TECNOLOGÍA DE MEDICIÓN AS-BUILT MEDICIÓN AS-BUILT Dimensiones reales al alcance de su mano Alguna vez ha tenido dificultades técnicas al tratar de actualizar los planos de su planta o construcción? Ha
TECNOLOGÍA DE MEDICIÓN AS-BUILT MEDICIÓN AS-BUILT Dimensiones reales al alcance de su mano Alguna vez ha tenido dificultades técnicas al tratar de actualizar los planos de su planta o construcción? Ha
Métodos de reconstrucción y análisis 3D de alta velocidad para inspección dimensional en entornos de fabricación. Mayo 2017
 Métodos de reconstrucción y análisis 3D de alta velocidad para inspección dimensional en entornos de fabricación Mayo 2017 Datos relevantes 119 42 8,2 M Ubicación www.vicomtech.org Parque Científico-Tecnológico
Métodos de reconstrucción y análisis 3D de alta velocidad para inspección dimensional en entornos de fabricación Mayo 2017 Datos relevantes 119 42 8,2 M Ubicación www.vicomtech.org Parque Científico-Tecnológico
Localización. CI-2657 Robótica M.Sc. Kryscia Ramírez Benavides
 M.Sc. Kryscia Ramírez Benavides Problemas de Navegación de los Robots Dónde estoy?. Dónde he estado? Mapa de decisiones. A dónde voy? Planificación de misiones. Cuál es la mejor manera de llegar? Planificación
M.Sc. Kryscia Ramírez Benavides Problemas de Navegación de los Robots Dónde estoy?. Dónde he estado? Mapa de decisiones. A dónde voy? Planificación de misiones. Cuál es la mejor manera de llegar? Planificación
LOCALIZACIÓN Y MAPEO SIMULTÁNEO EN TIEMPO REAL, EMPLEANDO UNA CÁMARA MONOCULAR
 LOCALIZACIÓN Y MAPEO SIMULTÁNEO EN TIEMPO REAL, EMPLEANDO UNA CÁMARA MONOCULAR Presentado por: Ing. ANDRES ALEJANDRO DIAZ TORO Director: Dr. Eduardo Caicedo Bravo Asesor: Dra. Lina María Paz GRUPO DE INVESTIGACION
LOCALIZACIÓN Y MAPEO SIMULTÁNEO EN TIEMPO REAL, EMPLEANDO UNA CÁMARA MONOCULAR Presentado por: Ing. ANDRES ALEJANDRO DIAZ TORO Director: Dr. Eduardo Caicedo Bravo Asesor: Dra. Lina María Paz GRUPO DE INVESTIGACION
imf ingeniería mecánica y formación Servicios Avanzados de Digitalizado 3d. LARGO ALCANCE.
 Servicios Avanzados de Digitalizado 3d. LARGO ALCANCE. ingeniería mecánica y formación índice tecnología de digitalizado 3d. escáner 3d largoalcance. a) Especificaciones técnicas. b) Modo de trabajo. casos
Servicios Avanzados de Digitalizado 3d. LARGO ALCANCE. ingeniería mecánica y formación índice tecnología de digitalizado 3d. escáner 3d largoalcance. a) Especificaciones técnicas. b) Modo de trabajo. casos
17/06/2014. Sistema compacto de captura y generación de nube de puntos en 3D mediante combinación de tecnología láser, servo eléctrico y Raspberry Pi
 Sistema compacto de captura y generación de nube de puntos en 3D mediante combinación de tecnología láser, servo eléctrico y Raspberry Pi Defensa PFM, Borja Pozo Larrocha 1 Datos básicos del proyecto Alumno:
Sistema compacto de captura y generación de nube de puntos en 3D mediante combinación de tecnología láser, servo eléctrico y Raspberry Pi Defensa PFM, Borja Pozo Larrocha 1 Datos básicos del proyecto Alumno:
Sistemas LIDAR embarcados en drones TerraSystem-LidarPod enero 2018
 Sistemas LIDAR embarcados en drones TerraSystem-LidarPod Índice 1. Características de los sensores LIDAR Sistema TerraSystem-LidarPod 2. Parámetros de influencia en la precisión del sistema LIDAR TerraSystem-LidarPod
Sistemas LIDAR embarcados en drones TerraSystem-LidarPod Índice 1. Características de los sensores LIDAR Sistema TerraSystem-LidarPod 2. Parámetros de influencia en la precisión del sistema LIDAR TerraSystem-LidarPod
Fecha: MAYO 2018 Hoja 1 de 1
 Fecha: MAYO 2018 Hoja 1 de 1 Nombre del equipo: ESTACION TOTAL ROBOTICA CON FUNCION ESCANEO 3D Equipo para realizar mediciones tridimensionales rápidas y exactas detalladamente de espacios interiores y
Fecha: MAYO 2018 Hoja 1 de 1 Nombre del equipo: ESTACION TOTAL ROBOTICA CON FUNCION ESCANEO 3D Equipo para realizar mediciones tridimensionales rápidas y exactas detalladamente de espacios interiores y
Reconocimiento visual de ademanes usando MS Kinect - Introducción. Dr. Héctor Avilés Escuela de Invierno de Robótica 2015
 Reconocimiento visual de ademanes usando MS Kinect - Introducción Dr. Héctor Avilés Escuela de Invierno de Robótica 2015 Contenido Motivación Dispositivos de captura Reconocimiento visual de ademanes Resumen
Reconocimiento visual de ademanes usando MS Kinect - Introducción Dr. Héctor Avilés Escuela de Invierno de Robótica 2015 Contenido Motivación Dispositivos de captura Reconocimiento visual de ademanes Resumen
Resultados. FACIAL - Captura instantánea y de alta precisión de la geometría facial 3D basada en fotogrametría estéreo pasiva
 FACIAL - Captura instantánea y de alta precisión de la geometría facial 3D basada en fotogrametría estéreo pasiva Plan de actividades de carácter no económico del IBV para 2015 (PROMECE) Resultados PROMECE
FACIAL - Captura instantánea y de alta precisión de la geometría facial 3D basada en fotogrametría estéreo pasiva Plan de actividades de carácter no económico del IBV para 2015 (PROMECE) Resultados PROMECE
SISTEMAS DE VISIÓN ARTIFICIAL
 PLIEGO DE PRESCRIPCIONES TÉCNICAS GENERALES PARA EL ACUERDO MARCO DE COMPRA DE MAQUINARIA Y EQUIPOS PARA LA SEDE PROVISIONAL DEL CENTRO DE INNOVACIÓN EN TECNOLOGÍAS DE FABRICACIÓN AVANZADA (CFA). La actuación
PLIEGO DE PRESCRIPCIONES TÉCNICAS GENERALES PARA EL ACUERDO MARCO DE COMPRA DE MAQUINARIA Y EQUIPOS PARA LA SEDE PROVISIONAL DEL CENTRO DE INNOVACIÓN EN TECNOLOGÍAS DE FABRICACIÓN AVANZADA (CFA). La actuación
Consultor. Desarrollo de productos. Servicio TILT RANGER TILT RANGER PARA MINERIA SUBTERRANEA ESCANEO & MAPEO
 TILT RANGER TILT RANGER PARA MINERIA SUBTERRANEA ESCANEO & MAPEO INTRODUCCION TILT RANGER es un sistema de escaneo y mapeo láser 3D que ha sido especialmente diseñado para zonas de GPS-privadas, como las
TILT RANGER TILT RANGER PARA MINERIA SUBTERRANEA ESCANEO & MAPEO INTRODUCCION TILT RANGER es un sistema de escaneo y mapeo láser 3D que ha sido especialmente diseñado para zonas de GPS-privadas, como las
ESCÁNER 3D PARA RECONSTRUCCIÓN COMPUTARIZADA DE OBJETOS REALES
 ESCÁNER 3D PARA RECONSTRUCCIÓN COMPUTARIZADA DE OBJETOS REALES Romero Hernández Antonio de Jesús 1, García de la Rosa Luis Armando 2 1 Ingeniería en Mecatrónica, Instituto Tecnológico Superior de Guanajuato
ESCÁNER 3D PARA RECONSTRUCCIÓN COMPUTARIZADA DE OBJETOS REALES Romero Hernández Antonio de Jesús 1, García de la Rosa Luis Armando 2 1 Ingeniería en Mecatrónica, Instituto Tecnológico Superior de Guanajuato
MEMORIA E2. Puesta a punto de técnicas y metodologías de registro
 MEMORIA E2. Puesta a punto de técnicas y metodologías de registro Entregable: Paquete de trabajo: Responsable: E2 PT2 IBV El contenido de este documento ha sido generado por el Instituto de Biomecánica
MEMORIA E2. Puesta a punto de técnicas y metodologías de registro Entregable: Paquete de trabajo: Responsable: E2 PT2 IBV El contenido de este documento ha sido generado por el Instituto de Biomecánica
Escáner Leica P30 y P40
 Localización rápida y segura de servicios subterráneos CARACTERÍSTICAS El Scáner Leica P40 posee la mayor versatilidad incluyendo las máximas capacidades a largo alcance. Ofrece un rendimiento excepcional,
Localización rápida y segura de servicios subterráneos CARACTERÍSTICAS El Scáner Leica P40 posee la mayor versatilidad incluyendo las máximas capacidades a largo alcance. Ofrece un rendimiento excepcional,
Visión de Alto Nivel
 Visión de Alto Nivel Dr. Luis Enrique Sucar INAOE esucar@inaoep.mx ccc.inaoep.mx/~esucar Sesión 1 Introducción 1 Introducción 2 Qué es Visión? Visión es saber que hay y donde mediante la vista (Aristóteles)
Visión de Alto Nivel Dr. Luis Enrique Sucar INAOE esucar@inaoep.mx ccc.inaoep.mx/~esucar Sesión 1 Introducción 1 Introducción 2 Qué es Visión? Visión es saber que hay y donde mediante la vista (Aristóteles)
IDEGEO: Infraestructura de datos Geoespaciales
 IDEGEO: Infraestructura de datos Geoespaciales Metadatos de: Modelo Digital de Elevación grises Identificación de la información Autor del Metadato Jesus Trujillo Resumen Un modelo digital de elevación
IDEGEO: Infraestructura de datos Geoespaciales Metadatos de: Modelo Digital de Elevación grises Identificación de la información Autor del Metadato Jesus Trujillo Resumen Un modelo digital de elevación
DISEÑAR Y CONSTRUIR UN ESCÁNER DIGITAL 3D A PARTIR DE UN SISTEMA DE VISIÓN ESTEREOSCÓPICO PARA EL LABORATORIO CNC DE LA ESPE-L
 MIGUEL ÁNGEL MOLINA HIDALGO 2015 DISEÑAR Y CONSTRUIR UN ESCÁNER DIGITAL 3D A PARTIR DE UN SISTEMA DE VISIÓN ESTEREOSCÓPICO PARA EL LABORATORIO CNC DE LA ESPE-L - Diseñar un escáner con 2 webcams para procesamiento
MIGUEL ÁNGEL MOLINA HIDALGO 2015 DISEÑAR Y CONSTRUIR UN ESCÁNER DIGITAL 3D A PARTIR DE UN SISTEMA DE VISIÓN ESTEREOSCÓPICO PARA EL LABORATORIO CNC DE LA ESPE-L - Diseñar un escáner con 2 webcams para procesamiento
TECNOLOGÍA LÁSER 3D PARA EL AFORO DE TANQUES
 TECNOLOGÍA LÁSER 3D PARA EL AFORO DE TANQUES CÁLCULO DE AFORO DE TANQUES El cálculo de aforo consiste en la evaluación de la cantidad de combustible líquido que puede contener un tanque de almacenamiento.
TECNOLOGÍA LÁSER 3D PARA EL AFORO DE TANQUES CÁLCULO DE AFORO DE TANQUES El cálculo de aforo consiste en la evaluación de la cantidad de combustible líquido que puede contener un tanque de almacenamiento.
MEMORIA. E 3.1 Software de reconstrucción de la mallas en bruto a partir del segmentado de imágenes. Entregable: E3.1. Paquete de trabajo: 3
 MEMORIA E 3.1 Software de reconstrucción de la mallas en bruto a partir del segmentado de imágenes Entregable: E3.1 Paquete de trabajo: 3 Responsable: IBV El contenido de este documento ha sido generado
MEMORIA E 3.1 Software de reconstrucción de la mallas en bruto a partir del segmentado de imágenes Entregable: E3.1 Paquete de trabajo: 3 Responsable: IBV El contenido de este documento ha sido generado
Sistemas de control geoespacial en túneles. Sebastián Pérez
 Seminario «Soluciones y avances tecnológicos para proyectos de túneles» 30 de agosto de 2016 Sistemas de control geoespacial en túneles Sebastián Pérez Ingeniero de soporte escáner Geocom www.cdt.cl 38
Seminario «Soluciones y avances tecnológicos para proyectos de túneles» 30 de agosto de 2016 Sistemas de control geoespacial en túneles Sebastián Pérez Ingeniero de soporte escáner Geocom www.cdt.cl 38
Toma de datos con el brazo robotizado
 El proyecto SICEMAM en el que participa el Grupo TIDOP de la Universidad de Salamanca trabaja en el desarrollo de un sistema de Realidad Aumentada para asistir en el mantenimiento de la flota aérea militar
El proyecto SICEMAM en el que participa el Grupo TIDOP de la Universidad de Salamanca trabaja en el desarrollo de un sistema de Realidad Aumentada para asistir en el mantenimiento de la flota aérea militar
DEPARTAMENTO DE CIENCIAS DE LA TIERRA Y LA CONSTRUCCIÓN
 DEPARTAMENTO DE CIENCIAS DE LA TIERRA Y LA CONSTRUCCIÓN CARRERA DE INGENIERÍA GEOGRÁFICA Y DEL MEDIO AMBIENTE TRABAJO PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO GEÓGRAFO Y DEL MEDIO AMBIENTE TEMA: USO
DEPARTAMENTO DE CIENCIAS DE LA TIERRA Y LA CONSTRUCCIÓN CARRERA DE INGENIERÍA GEOGRÁFICA Y DEL MEDIO AMBIENTE TRABAJO PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO GEÓGRAFO Y DEL MEDIO AMBIENTE TEMA: USO
Proyecto: Levantamiento con Láser Escáner San Manel, Hospital de Sant Pau Barcelona
 Proyecto: Levantamiento con Láser Escáner San Manel, Hospital de Sant Pau Barcelona INDICE 1.0 Presentación 2.0 Antecedentes del LMVC 3.0 Levantamiento y Modelo 3D 4.0 Resumen 5.0 Equipo de trabajo 1.0
Proyecto: Levantamiento con Láser Escáner San Manel, Hospital de Sant Pau Barcelona INDICE 1.0 Presentación 2.0 Antecedentes del LMVC 3.0 Levantamiento y Modelo 3D 4.0 Resumen 5.0 Equipo de trabajo 1.0
Objetivo de la Mesa de Trabajo del CEM
 Guadalajara, Jalisco 18, y 19 y 20 de abril Objetivo de la Mesa de Trabajo del CEM Al término de la mesa de trabajo los asistentes conocerán la metodología empleada para generar la información fuente utilizada
Guadalajara, Jalisco 18, y 19 y 20 de abril Objetivo de la Mesa de Trabajo del CEM Al término de la mesa de trabajo los asistentes conocerán la metodología empleada para generar la información fuente utilizada
DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA CARRERA DE INGENIERÍA EN ELECTRÓNICA E INSTRUMENTACIÓN AUTOR: WILLIAM LÓPEZ DIRECTOR: ING.
 DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA CARRERA DE INGENIERÍA EN ELECTRÓNICA E INSTRUMENTACIÓN TEMA: DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE REALIDAD VIRTUAL BASADO EN LA TECNOLOGÍA KINECT 2.0 PARA LA
DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA CARRERA DE INGENIERÍA EN ELECTRÓNICA E INSTRUMENTACIÓN TEMA: DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE REALIDAD VIRTUAL BASADO EN LA TECNOLOGÍA KINECT 2.0 PARA LA
CAPITULO VII PRUEBAS FISICAS CON EL BANCO DE PRUEBAS DEL MOTOR
 CAPITULO VII PRUEBAS FISICAS CON EL BANCO DE PRUEBAS DEL MOTOR Para este capitulo se profundizará más en la función del vibrómetro rotacional láser, para así dar paso a los datos obtenidos y características
CAPITULO VII PRUEBAS FISICAS CON EL BANCO DE PRUEBAS DEL MOTOR Para este capitulo se profundizará más en la función del vibrómetro rotacional láser, para así dar paso a los datos obtenidos y características
Revista Digital Universitaria. 10 de enero 2006 Volumen 7 Número 1 ISSN: Bermeo Campos Nadia Lizbeth
 Revista Digital Universitaria 10 de enero 2006 Volumen 7 Número 1 ISSN: 1067-6079 ROBOTS CONTROLADOS POR INTERNET PARA LA LOCALIZACIÓN DE OBJETOS [ETAPA 1 DESARROLLO DE SOFTWARE] Bermeo Campos Nadia Lizbeth
Revista Digital Universitaria 10 de enero 2006 Volumen 7 Número 1 ISSN: 1067-6079 ROBOTS CONTROLADOS POR INTERNET PARA LA LOCALIZACIÓN DE OBJETOS [ETAPA 1 DESARROLLO DE SOFTWARE] Bermeo Campos Nadia Lizbeth
1/49. Procesamiento Digital de Audio. Dr. Caleb Rascón
 1/49 Procesamiento Digital de Audio Dr. Caleb Rascón caleb.rascon@iimas.unam.mx 2/49 Procesamiento Digital de Audio El campo de señales de audio es normalmente considerado como el primito especial del
1/49 Procesamiento Digital de Audio Dr. Caleb Rascón caleb.rascon@iimas.unam.mx 2/49 Procesamiento Digital de Audio El campo de señales de audio es normalmente considerado como el primito especial del
Tecnologías disruptivas en la captura masiva de datos
 Tecnologías disruptivas en la captura masiva de datos Septiembre 2018 Captura masiva de datos Mobile Mapping System Qué es? Es un sistema embarcable en cualquier tipo de vehículo (terrestre, aéreo o marítimo)
Tecnologías disruptivas en la captura masiva de datos Septiembre 2018 Captura masiva de datos Mobile Mapping System Qué es? Es un sistema embarcable en cualquier tipo de vehículo (terrestre, aéreo o marítimo)
Tema 1.- Introducción a la Visión Artificial
 Tema 1.- Introducción a la Visión Artificial Visión Artificial Avanzada Prof. Dr. Nicolás Luis Fernández García Departamento de Informática y Análisis Numérico Universidad de Córdoba Universidad de Córdoba
Tema 1.- Introducción a la Visión Artificial Visión Artificial Avanzada Prof. Dr. Nicolás Luis Fernández García Departamento de Informática y Análisis Numérico Universidad de Córdoba Universidad de Córdoba
ESCUELA POLITÉCNICA DEL EJÉRCITO EXTENSIÓN LATACUNGA NANCY VELASCO
 ESCUELA POLITÉCNICA DEL EJÉRCITO EXTENSIÓN LATACUNGA NANCY VELASCO Desarrollo e implementación de un algoritmo para detección de objetos con tecnología Kinect Justificación Apoyo a personas no videntes
ESCUELA POLITÉCNICA DEL EJÉRCITO EXTENSIÓN LATACUNGA NANCY VELASCO Desarrollo e implementación de un algoritmo para detección de objetos con tecnología Kinect Justificación Apoyo a personas no videntes
Reconstrucción de interiores basada en proyecciones de planos
 Universidad Carlos III de Madrid Repositorio institucional e-archivo Trabajos académicos http://e-archivo.uc3m.es Proyectos Fin de Carrera 2014-06 Reconstrucción de interiores basada en proyecciones de
Universidad Carlos III de Madrid Repositorio institucional e-archivo Trabajos académicos http://e-archivo.uc3m.es Proyectos Fin de Carrera 2014-06 Reconstrucción de interiores basada en proyecciones de
Paquete Pro S910. Todo lo que necesita para obtener el máximo rendimiento de un S910
 Paquete Pro S910 Todo lo que necesita para obtener el máximo rendimiento de un S910 El Leica DISTO S910 Pro Pack incluye el S910, el TRI 70 trípode, placa GZM3 objetivo, estuche Leica, y el nuevo TLC 360-S.
Paquete Pro S910 Todo lo que necesita para obtener el máximo rendimiento de un S910 El Leica DISTO S910 Pro Pack incluye el S910, el TRI 70 trípode, placa GZM3 objetivo, estuche Leica, y el nuevo TLC 360-S.
Estimación de recursos forestales con tecnología LiDAR aerotransportada
 Estimación de recursos forestales con tecnología LiDAR aerotransportada Diego Cuasante Corral Director de Ingeniería y Medio Ambiente BLOM España Carlos García Güemes Jefe Sección Territorial de Ordenación
Estimación de recursos forestales con tecnología LiDAR aerotransportada Diego Cuasante Corral Director de Ingeniería y Medio Ambiente BLOM España Carlos García Güemes Jefe Sección Territorial de Ordenación
TRIMBLE SX10 ESTACIÓN TOTAL + ESCÁNER 3D + FOTOGRAMETRÍA. Revolución en la topografía integrada
 TRIMBLE SX10 ESTACIÓN TOTAL + ESCÁNER 3D + FOTOGRAMETRÍA Revolución en la topografía integrada La necesidad persiste, incluso a través del cambio Mientras la tecnología cambia y evoluciona constantemente,
TRIMBLE SX10 ESTACIÓN TOTAL + ESCÁNER 3D + FOTOGRAMETRÍA Revolución en la topografía integrada La necesidad persiste, incluso a través del cambio Mientras la tecnología cambia y evoluciona constantemente,
Mapeo. CI-2657 Robótica M.Sc. Kryscia Ramírez Benavides
 M.Sc. Kryscia Ramírez Benavides Problemas de Navegación de los Robots Dónde estoy? Localización. Dónde he estado? Mapa de decisiones. A dónde voy? Planificación de misiones. Cuál es la mejor manera de
M.Sc. Kryscia Ramírez Benavides Problemas de Navegación de los Robots Dónde estoy? Localización. Dónde he estado? Mapa de decisiones. A dónde voy? Planificación de misiones. Cuál es la mejor manera de
Visión 3D en robots móviles
 José María Cañas Plaza http://gsyc.escet.urjc.es/jmplaza III Jornadas de robótica URJC, 17 octubre 2006 Contenidos 1 Contenidos Introducción Localización de objetos Reconstrucción 3D Fusión sensorial Atención
José María Cañas Plaza http://gsyc.escet.urjc.es/jmplaza III Jornadas de robótica URJC, 17 octubre 2006 Contenidos 1 Contenidos Introducción Localización de objetos Reconstrucción 3D Fusión sensorial Atención
LiDAR, la precisión a tu alcance. Víctor J. García Morales Área de Cartografía
 Víctor J. García Morales Área de Cartografía Objetivos de esta presentación: - Conocer la tecnología LiDAR. - Qué información existe en Navarra. - Para qué me pueden interesar estos datos. - Aplicaciones
Víctor J. García Morales Área de Cartografía Objetivos de esta presentación: - Conocer la tecnología LiDAR. - Qué información existe en Navarra. - Para qué me pueden interesar estos datos. - Aplicaciones
Sistemas LIDAR embarcados en drones TerraSystem-LidarPod
 Sistemas LIDAR embarcados en drones TerraSystem-LidarPod Índice 1. Características de los sensores LIDAR Sistema TerraSystem-LidarPod 2. Ventajas de los Sistemas LIDAR aerotransportados 3. Parámetros de
Sistemas LIDAR embarcados en drones TerraSystem-LidarPod Índice 1. Características de los sensores LIDAR Sistema TerraSystem-LidarPod 2. Ventajas de los Sistemas LIDAR aerotransportados 3. Parámetros de
Integración y Comunicación.
 Integración y Comunicación. www.ikom.cl En China hay 1.300.000.000 de personas La secretaria del trabajo de EEUU calcula que en los próximos años una persona habrá tenido 14 empleos antes de cumplir los
Integración y Comunicación. www.ikom.cl En China hay 1.300.000.000 de personas La secretaria del trabajo de EEUU calcula que en los próximos años una persona habrá tenido 14 empleos antes de cumplir los
Grupo de Investigación en Informática Gráfica
 Grupo de Investigación en Informática Gráfica http://lrv.ugr.es Creado en 1996 Laboratorio de Realidad Virtual 6 profesores, 3 investigadores y 4 doctorandos Equipo cohesionado Trabajos de investigación
Grupo de Investigación en Informática Gráfica http://lrv.ugr.es Creado en 1996 Laboratorio de Realidad Virtual 6 profesores, 3 investigadores y 4 doctorandos Equipo cohesionado Trabajos de investigación
FICHA TÉCNICA DE EQUIPOS
 SCANNER 3D GLS-1500 SCANER 3D TOPCON GLS 1500 CAMPO VISIÓN 70º Máximo en Vertical 360º Máximo en Horizontal VELOCIDAD DE ESCANEO 30.000 puntos/segundo.. RANGO DE ESCANEO 150m.. PRECISIÓN ANGULAR 6 vertical
SCANNER 3D GLS-1500 SCANER 3D TOPCON GLS 1500 CAMPO VISIÓN 70º Máximo en Vertical 360º Máximo en Horizontal VELOCIDAD DE ESCANEO 30.000 puntos/segundo.. RANGO DE ESCANEO 150m.. PRECISIÓN ANGULAR 6 vertical
REALWORKS. escaneado LASER 3D. 55 horas FORMACIÓN
 REALWORKS escaneado LASER 3D 55 horas FORMACIÓN /formacion formación específica adaptada FORMACIÓN Imasgal desarrolla formación específica para un alumnado cuyo perfil esté relacionado en el sector de
REALWORKS escaneado LASER 3D 55 horas FORMACIÓN /formacion formación específica adaptada FORMACIÓN Imasgal desarrolla formación específica para un alumnado cuyo perfil esté relacionado en el sector de
Continental Cubierta de altimetría e hidrografía a partir de los Modelos Digitales de Elevación LIDAR de tipo Terreno Introducción
 Continental Cubierta de altimetría e hidrografía a partir de los Modelos Digitales de Elevación LIDAR de tipo Terreno Introducción El Instituto Nacional de Estadística y Geografía, en su componente geográfico
Continental Cubierta de altimetría e hidrografía a partir de los Modelos Digitales de Elevación LIDAR de tipo Terreno Introducción El Instituto Nacional de Estadística y Geografía, en su componente geográfico
Construcción de mapas 3D a partir de la extracción de primitivas geométricas obtenidas de. González Barbosa José Joel. CICATA Qro
 Construcción de mapas 3D a partir de la extracción de primitivas geométricas obtenidas de datos de un LIDAR. González Barbosa José Joel CICATA Qro Resumen A inicios del año el CICATA Querétaro cuenta con
Construcción de mapas 3D a partir de la extracción de primitivas geométricas obtenidas de datos de un LIDAR. González Barbosa José Joel CICATA Qro Resumen A inicios del año el CICATA Querétaro cuenta con
ANÁLISIS BIOMECÁNICO DEL EJERCICIO FÍSICO CON SISTEMA KINECT INTEGRADO A LABVIEW. Politécnico Nacional, México D.F
 ANÁLISIS BIOMECÁNICO DEL EJERCICIO FÍSICO CON SISTEMA KINECT INTEGRADO A LABVIEW Rodrigo Sánchez González 1, Aura A. Ruiz Heredia 1, Héctor García Estrada 1, Agustín I. Cabrera Llanos 1, María G. Ramírez
ANÁLISIS BIOMECÁNICO DEL EJERCICIO FÍSICO CON SISTEMA KINECT INTEGRADO A LABVIEW Rodrigo Sánchez González 1, Aura A. Ruiz Heredia 1, Héctor García Estrada 1, Agustín I. Cabrera Llanos 1, María G. Ramírez
Inventariado Forestal y Estimación del potencial de Biomasa mediante LiDAR. Carmen Robles Factoría de Innovación de A Coruña 19 de Junio de 2014
 Inventariado Forestal y Estimación del potencial de Biomasa mediante LiDAR Carmen Robles Factoría de Innovación de A Coruña 19 de Junio de 2014 1 INDICE Introducción. Inventario forestal. Valoración de
Inventariado Forestal y Estimación del potencial de Biomasa mediante LiDAR Carmen Robles Factoría de Innovación de A Coruña 19 de Junio de 2014 1 INDICE Introducción. Inventario forestal. Valoración de
RATÓN MECÁNICO. Los ratones mecánicos, detectan el movimiento mediante luz infrarroja (ver. figura 1
 RATÓN MECÁNICO Son los más utilizados, aunque se tiende a sustituirlos por los ópticos, su funcionamiento se basa en una bola de silicona que gira en la parte inferior del ratón a medida que lo desplazamos.
RATÓN MECÁNICO Son los más utilizados, aunque se tiende a sustituirlos por los ópticos, su funcionamiento se basa en una bola de silicona que gira en la parte inferior del ratón a medida que lo desplazamos.
Monitoreos de Calidad de Aire
 Monitoreos de Calidad de Aire Definición Monitoreo de Calidad de Aire El monitoreo de Calidad de Aire es un conjunto de metodologías diseñadas para muestrear, analizar y procesar en forma continua las
Monitoreos de Calidad de Aire Definición Monitoreo de Calidad de Aire El monitoreo de Calidad de Aire es un conjunto de metodologías diseñadas para muestrear, analizar y procesar en forma continua las
2 horas semanales 36 horas semestral. No suficientable
 IDENTIFICACIÓN NOMBRE ESCUELA NOMBRE DEPARTAMENTO ESCUELA DE INGENIERIA Ingeniería De Diseño ÁREA DE CONOCIMIENTO NOMBRE ASIGNATURA EN ESPAÑOL NOMBRE ASIGNATURA EN INGLÉS CÓDIGO INGENIERIA ELECTRONICA,
IDENTIFICACIÓN NOMBRE ESCUELA NOMBRE DEPARTAMENTO ESCUELA DE INGENIERIA Ingeniería De Diseño ÁREA DE CONOCIMIENTO NOMBRE ASIGNATURA EN ESPAÑOL NOMBRE ASIGNATURA EN INGLÉS CÓDIGO INGENIERIA ELECTRONICA,
Segunda cobertura LiDAR de la Comunidad Foral de Navarra
 Segunda cobertura LiDAR de la Comunidad Foral de Navarra Jorge L. Iribas Cardona, Roberto Pascual Orcajo (Gobierno de Navarra) Víctor J. García Morales (Tracasa) 24 de Septiembre 2018 Antecedentes Larga
Segunda cobertura LiDAR de la Comunidad Foral de Navarra Jorge L. Iribas Cardona, Roberto Pascual Orcajo (Gobierno de Navarra) Víctor J. García Morales (Tracasa) 24 de Septiembre 2018 Antecedentes Larga
CAPTURA MASIVA DE DATOS PARA GESTIÓN 4.0 DE INFRAESTRUCTURAS
 CAPTURA MASIVA DE DATOS PARA GESTIÓN 4.0 DE INFRAESTRUCTURAS 06 Junio 2017 INGENIERÍA INSITU Director General. Carlos Martinez Bertrand Carlos.martinez@ingenieriainsitu.com www.ingenieriainsitu.com ACTUALIDAD
CAPTURA MASIVA DE DATOS PARA GESTIÓN 4.0 DE INFRAESTRUCTURAS 06 Junio 2017 INGENIERÍA INSITU Director General. Carlos Martinez Bertrand Carlos.martinez@ingenieriainsitu.com www.ingenieriainsitu.com ACTUALIDAD
ESCÁNER LASER TERRESTRE, MODELADO VIRTUAL 3D: REPRESENTACIÓN ARQUITECTÓNICA Y URBANA
 ESCÁNER LASER TERRESTRE, MODELADO VIRTUAL 3D: REPRESENTACIÓN ARQUITECTÓNICA Y URBANA Rolando Biere Arenas Universidad Politécnica de Cataluña Centro de Política de Suelo y Valoraciones Laboratorio de Modelización
ESCÁNER LASER TERRESTRE, MODELADO VIRTUAL 3D: REPRESENTACIÓN ARQUITECTÓNICA Y URBANA Rolando Biere Arenas Universidad Politécnica de Cataluña Centro de Política de Suelo y Valoraciones Laboratorio de Modelización
Reconstrucción 3D del cuerpo humano mediante puntos de referencia
 UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO FACULTAD DE INGENIERÍA Reconstrucción 3D del cuerpo humano mediante puntos de referencia TESIS Que para obtener el título de Ingeniero en Computación P R E S E N
UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO FACULTAD DE INGENIERÍA Reconstrucción 3D del cuerpo humano mediante puntos de referencia TESIS Que para obtener el título de Ingeniero en Computación P R E S E N
CAPÍTULO 1. INTRODUCCIÓN
 1 CAPÍTULO 1. INTRODUCCIÓN En este primer capítulo se realiza una introducción general al proyecto, presentando a su vez la motivación del mismo y el objetivo principal perseguido. La tecnología LIDAR
1 CAPÍTULO 1. INTRODUCCIÓN En este primer capítulo se realiza una introducción general al proyecto, presentando a su vez la motivación del mismo y el objetivo principal perseguido. La tecnología LIDAR
Ciudades Digitales Eficiencia en el Servicio de Limpieza y mantenimiento Urbano CleanTEC, Ponferrada, España 29 y 30 Noviembre
 Ciudades Digitales Eficiencia en el Servicio de Limpieza y mantenimiento Urbano CleanTEC, Ponferrada, España 29 y 30 Noviembre Criticidad del Servicio 1. Alto % dentro del presupuesto de la administración.
Ciudades Digitales Eficiencia en el Servicio de Limpieza y mantenimiento Urbano CleanTEC, Ponferrada, España 29 y 30 Noviembre Criticidad del Servicio 1. Alto % dentro del presupuesto de la administración.
Curso de Electricidad, Electrónica e Instrumentación Biomédica con Seguridad - CEEIBS -
 Curso de Electricidad, Electrónica e Instrumentación Biomédica con Seguridad - CEEIBS - 1/18 Info. Biológica digital - Conceptos básicos Información biológica: En este curso consideraremos información
Curso de Electricidad, Electrónica e Instrumentación Biomédica con Seguridad - CEEIBS - 1/18 Info. Biológica digital - Conceptos básicos Información biológica: En este curso consideraremos información
Preguntas y Respuestas
 SISTEMA DE VISIÓN Preguntas y Respuestas VERIFICACIÓN DE COMPETENCIA Vol.2 Preguntas VER PÁGINA 4 PARA RESPUESTAS Y EXPLICACIONES. Ponga a prueba sus conocimientos y know-how sobre la optimización de aplicaciones
SISTEMA DE VISIÓN Preguntas y Respuestas VERIFICACIÓN DE COMPETENCIA Vol.2 Preguntas VER PÁGINA 4 PARA RESPUESTAS Y EXPLICACIONES. Ponga a prueba sus conocimientos y know-how sobre la optimización de aplicaciones
CÓDIGO LOS NUEVOS ALGORITMOS DE PROCESADO Y TENDENCIAS EN GEOMETRÍA COMPUTACIONAL PARA LA EXPLOTACIÓN Y VALORACIÓN DE DATOS 3D
 REHABEND 2014 1-4 Abril, 2014, Santander, España CÓDIGO 1.7.05 LOS NUEVOS ALGORITMOS DE PROCESADO Y TENDENCIAS EN GEOMETRÍA COMPUTACIONAL PARA LA EXPLOTACIÓN Y VALORACIÓN DE DATOS 3D Bayarri Cayón, Vicente
REHABEND 2014 1-4 Abril, 2014, Santander, España CÓDIGO 1.7.05 LOS NUEVOS ALGORITMOS DE PROCESADO Y TENDENCIAS EN GEOMETRÍA COMPUTACIONAL PARA LA EXPLOTACIÓN Y VALORACIÓN DE DATOS 3D Bayarri Cayón, Vicente
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
 PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ FACULTAD DE CIENCIAS E INGENIERÍA REGISTRO DE UNA SECUENCIA TEMPORAL DE NUBES DE PUNTOS UTILIZANDO TECNOLOGIA KINECT PARA LA RECONSTRUCCION TRIDIMENSIONAL DE MATERIAL
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ FACULTAD DE CIENCIAS E INGENIERÍA REGISTRO DE UNA SECUENCIA TEMPORAL DE NUBES DE PUNTOS UTILIZANDO TECNOLOGIA KINECT PARA LA RECONSTRUCCION TRIDIMENSIONAL DE MATERIAL
CONGRESO SOBRE LOS DRONES APLICADOS A LA INGENIERÍA CIVIL APLICACIONES CARTOGRAFICAS. UAV BLACKBIRD S.L.
 CONGRESO SOBRE LOS DRONES APLICADOS A LA INGENIERÍA CIVIL APLICACIONES CARTOGRAFICAS ESQUEMA DE LA PRESENTACION 1. Introducción a la Fotogrametría Moderna, principios básicos. 2. Tipos de RPAS que se utilizan
CONGRESO SOBRE LOS DRONES APLICADOS A LA INGENIERÍA CIVIL APLICACIONES CARTOGRAFICAS ESQUEMA DE LA PRESENTACION 1. Introducción a la Fotogrametría Moderna, principios básicos. 2. Tipos de RPAS que se utilizan
TECNOLOGÍA BEAGLEBONE BLACK BAJO SOFTWARE LIBRE.
 OBJETIVO GENERAL DISEÑAR E IMPLEMENTAR UN DISPOSITIVO DE APOYO PARA LA MOVILIDAD DE PERSONAS NO VIDENTES USANDO EL SENSOR DE MOVIMIENTO ASUS XTION PRO LIVE Y TECNOLOGÍA BEAGLEBONE BLACK BAJO SOFTWARE LIBRE.
OBJETIVO GENERAL DISEÑAR E IMPLEMENTAR UN DISPOSITIVO DE APOYO PARA LA MOVILIDAD DE PERSONAS NO VIDENTES USANDO EL SENSOR DE MOVIMIENTO ASUS XTION PRO LIVE Y TECNOLOGÍA BEAGLEBONE BLACK BAJO SOFTWARE LIBRE.
LEVANTAMIENTO CON LÁSER ESCÁNER MÓVIL (MMS), INVENTARIO Y CAPTURA DE IMAGEN EN METRO DE BARCELONA
, INVENTARIO Y CAPTURA DE IMAGEN EN METRO DE BARCELONA") LEVANTAMIENTO CON LÁSER ESCÁNER MÓVIL (MMS), INVENTARIO Y CAPTURA DE IMAGEN EN METRO DE BARCELONA Índice de contenidos 1. OBJETO... 3 2. SISTEMA DE COORDENADAS... 3 3. LEVANTAMIENTO CARTOGRÁFICO DE REFERENCIA...
LEVANTAMIENTO CON LÁSER ESCÁNER MÓVIL (MMS), INVENTARIO Y CAPTURA DE IMAGEN EN METRO DE BARCELONA Índice de contenidos 1. OBJETO... 3 2. SISTEMA DE COORDENADAS... 3 3. LEVANTAMIENTO CARTOGRÁFICO DE REFERENCIA...
TECNOLOGÍA LÁSER. CARACTERÍSTICAS
 Sistema de medición preciso y complejo que tiene como objetivo el análisis, conservación, restauración y/o la catalogación de obras de valor artístico, arquitectónico o industrial. TECNOLOGÍA LÁSER. CARACTERÍSTICAS
Sistema de medición preciso y complejo que tiene como objetivo el análisis, conservación, restauración y/o la catalogación de obras de valor artístico, arquitectónico o industrial. TECNOLOGÍA LÁSER. CARACTERÍSTICAS
Día Internacional de la Telecomunicaciones
 Día Internacional de la Telecomunicaciones Procesamiento digital de imágenes satelitales y adquiridas con drone aplicado a la agricultura de precisión y monitoreo de la biodiversidad Dirección de Investigación
Día Internacional de la Telecomunicaciones Procesamiento digital de imágenes satelitales y adquiridas con drone aplicado a la agricultura de precisión y monitoreo de la biodiversidad Dirección de Investigación
Índice de Contenidos
 Índice de Contenidos CAPÍTULO 1 INTRODUCCIÓN... 13 1.1 Problemática... 14 1.2 Contexto industrial... 14 1.2.1 Lugar de aplicación... 15 1.3 Objetivos... 16 1.3.1 Objetivo general... 17 1.3.2 Objetivos
Índice de Contenidos CAPÍTULO 1 INTRODUCCIÓN... 13 1.1 Problemática... 14 1.2 Contexto industrial... 14 1.2.1 Lugar de aplicación... 15 1.3 Objetivos... 16 1.3.1 Objetivo general... 17 1.3.2 Objetivos
ADENDA No Modificar en Instrucciones a los Proponentes - HOJA DE DATOS EL HdD, nº 21 - Refs. a instrucciones C21 / D.24, el cual quedaría así:
 ADENDA No. 1 Proceso A2017-000486 Objeto Adquisición de Receptores Geodesicos GNSS GPS (Doble Frecuencia) controladora y software de pos procesamiento 3D. 1. Modificar en Instrucciones a los Proponentes
ADENDA No. 1 Proceso A2017-000486 Objeto Adquisición de Receptores Geodesicos GNSS GPS (Doble Frecuencia) controladora y software de pos procesamiento 3D. 1. Modificar en Instrucciones a los Proponentes
Los métodos de procesamientos de imágenes, no definen una forma cuantitativa para
 77 5.1 PRUEBAS Y CONCLUSIONES Los métodos de procesamientos de imágenes, no definen una forma cuantitativa para establecer un nivel de procesamiento, debido a que son métodos apreciativos a quien los diseña.
77 5.1 PRUEBAS Y CONCLUSIONES Los métodos de procesamientos de imágenes, no definen una forma cuantitativa para establecer un nivel de procesamiento, debido a que son métodos apreciativos a quien los diseña.
Un archivo RAW es convertido en una imagen final JPEG en varias etapas, cada una de las cuales puede contener varios ajustes de imagen irreversibles.
 Formato RAW Formatos de Imagen El formato RAW en la fotografía digital es el equivalente de un negativo de fotografía analógica: contiene información de pixel intacta, (raw=crudo) directamente desde el
Formato RAW Formatos de Imagen El formato RAW en la fotografía digital es el equivalente de un negativo de fotografía analógica: contiene información de pixel intacta, (raw=crudo) directamente desde el
Aeros Permita que nuestros drones hagan el trabajo
 Aeros Permita que nuestros drones hagan el trabajo Servicios de fotogrametría Brochure interactivo 1 Índice 2 Qué es la fotogrametría?... 3 Usos/aplicaciones... 4 Procesos... 5 Equipos... 6 Servicios...
Aeros Permita que nuestros drones hagan el trabajo Servicios de fotogrametría Brochure interactivo 1 Índice 2 Qué es la fotogrametría?... 3 Usos/aplicaciones... 4 Procesos... 5 Equipos... 6 Servicios...
Visor de Fotografías Oblicuas de la Comunidad de Madrid y modelización tridimensional de edificaciones
 Visor de Fotografías Oblicuas de la Comunidad de Madrid y modelización tridimensional de edificaciones Jose Ramón Pérez de Arenaza Torroja Centro Regional de Información Cartográfica Esquema de la presentación
Visor de Fotografías Oblicuas de la Comunidad de Madrid y modelización tridimensional de edificaciones Jose Ramón Pérez de Arenaza Torroja Centro Regional de Información Cartográfica Esquema de la presentación
Mediciones de la Altura de la Base de Nubes. Claudio Porrini Principios Básicos de Mediciones Atmosféricas- Curso 2011
 Mediciones de la Altura de la Base de Nubes Claudio Porrini Principios Básicos de Mediciones Atmosféricas- Curso 2011 Introducción La observación de nubes y la estimación o la medida de la altura de la
Mediciones de la Altura de la Base de Nubes Claudio Porrini Principios Básicos de Mediciones Atmosféricas- Curso 2011 Introducción La observación de nubes y la estimación o la medida de la altura de la
SENSORES REMOTOS Y SUS APLICACIONES EN ANTÁRTICA. Carlos A. Cárdenas M. 2016
 SENSORES REMOTOS Y SUS APLICACIONES EN ANTÁRTICA Carlos A. Cárdenas M. 2016 Que es un sensor remoto? Sensores Remotos Que es un sensor remoto? En términos generales es cualquier instrumento que permita
SENSORES REMOTOS Y SUS APLICACIONES EN ANTÁRTICA Carlos A. Cárdenas M. 2016 Que es un sensor remoto? Sensores Remotos Que es un sensor remoto? En términos generales es cualquier instrumento que permita
SOFTWARE CONTROL DE VISITANTES.
 SOFTWARE CONTROL DE VISITANTES. DESCRIPCION EQUIPOS REQUERIDOS. RELOJ PARA PARA CONTROL DE ACCESO DE PERSONAL, REF: CONTROL DE ACCESO ZK- IN01A SOFWARE PARA CONTROL DE VISITANTES, RESIDENTES REGISTRO DE
SOFTWARE CONTROL DE VISITANTES. DESCRIPCION EQUIPOS REQUERIDOS. RELOJ PARA PARA CONTROL DE ACCESO DE PERSONAL, REF: CONTROL DE ACCESO ZK- IN01A SOFWARE PARA CONTROL DE VISITANTES, RESIDENTES REGISTRO DE
BIGMonitor. DRONES y Soluciones Geoespaciales para la Explotación de Canteras On-Line
 BIGMonitor DRONES y Soluciones Geoespaciales para la Explotación de Canteras On-Line Seguridad jurídica de la concesión Seguridad de la ubicación geoespacial de las cuadriculas Seguridad de análisis de
BIGMonitor DRONES y Soluciones Geoespaciales para la Explotación de Canteras On-Line Seguridad jurídica de la concesión Seguridad de la ubicación geoespacial de las cuadriculas Seguridad de análisis de
Fusion PowerPoint Presentation. 3D Laser & Drone Solutions
 Fusion PowerPoint Presentation 3D Laser & Drone Solutions Zenit3D pone a su disposición la última tecnología que ayudará a ingenieros y arquitectos en la medición y análisis de estructuras. No solo supondrá
Fusion PowerPoint Presentation 3D Laser & Drone Solutions Zenit3D pone a su disposición la última tecnología que ayudará a ingenieros y arquitectos en la medición y análisis de estructuras. No solo supondrá
Aplicación de los RPAS a la Restauración del Patrimonio Arquitectónico Español
 Aplicación de los RPAS a la Restauración del Patrimonio Arquitectónico Español Ana Belén Bello, Argentta Ingenieros S.L. Arturo J. Zazo, Geotronics Southern Europe S.L. Marina Alonso Universidad Politécnica
Aplicación de los RPAS a la Restauración del Patrimonio Arquitectónico Español Ana Belén Bello, Argentta Ingenieros S.L. Arturo J. Zazo, Geotronics Southern Europe S.L. Marina Alonso Universidad Politécnica
SISTEMA LiDAR ORTOFOTOGRAMÉTRICO
 SISTEMA LiDAR ORTOFOTOGRAMÉTRICO Qué es LiDAR? El láser aéreo LiDAR (LIght Detection And Ranging) es un método eficaz para obtener datos tridimensionales. Los LiDAR son dispositivos activos, dado que utilizan
SISTEMA LiDAR ORTOFOTOGRAMÉTRICO Qué es LiDAR? El láser aéreo LiDAR (LIght Detection And Ranging) es un método eficaz para obtener datos tridimensionales. Los LiDAR son dispositivos activos, dado que utilizan
LAS 14 AREAS TEMATICAS DE LA COMPUTACIÓN
 En los años 1986-1989 la ACM(Association for Computing Machinery) y la IEEE (Institute for Electrical and Electronic Engineers)Computer Society : Peter Denning y otros definen la Informática como disciplina
En los años 1986-1989 la ACM(Association for Computing Machinery) y la IEEE (Institute for Electrical and Electronic Engineers)Computer Society : Peter Denning y otros definen la Informática como disciplina
CENIT-E OCEAN LÍDER ACTIVIDAD A. I
 PROYECTO CENIT-E LÍDERES EN ENERGÍAS RENOVABLES OCEÁNICAS ACTIVIDAD A. I Investigación en Tecnologías y sistemas Inteligentes para la Identificación y Caracterización de Emplazamientos Aptos y Óptimos,
PROYECTO CENIT-E LÍDERES EN ENERGÍAS RENOVABLES OCEÁNICAS ACTIVIDAD A. I Investigación en Tecnologías y sistemas Inteligentes para la Identificación y Caracterización de Emplazamientos Aptos y Óptimos,