Técnicas de autolocalización en 3D con visión monocular
|
|
|
- Jorge Caballero Aguilar
- hace 5 años
- Vistas:
Transcripción
1 Técnicas de autolocalización en 3D con visión monocular Eduardo Perdices Universidad Rey Juan Carlos 05 Abril 2016
2 Contenidos 1 Contenidos Introducción MonoSLAM PTAM SVO Futuro Próximo

3 Introducción 2 Introducción Visión Artificial: campo de la informática que estudia el uso de cámaras Bajo coste Permite extraer mucha información Procesamiento muy costoso Detección de bordes, features, texturas... Reconocimiento de formas, caras...
 MediaPro: distancia recorrida por un")
4 Introducción 3 Aplicaciones Medicina OCR Biometría Ojo de halcón (tenis) MediaPro: distancia recorrida por un futbolista

5 Introducción 4 Autolocalización con cámaras Visión monocular Cámaras estéreo: Bumblebee Cámaras RGBD: Kinect, Xtion, Kinect2 Requisitos: tiempo real, robustez

6 Introducción 5 Aplicaciones de la autolocalización Navegación Mapas, reconstrucción 3D Realidad aumentada Transporte Vigilancia Vehículos autónomos
7 Extracción de información 6 Extracción de información Modelo Pin-Hole Parámetros intrínsecos Distancia focal Centro óptico Skew (distorsión...) Parámetros extrínsecos: posición y orientación Permite sacar información espacial



8 Extracción de información 7 Detección de puntos Puntos con rica información local a su alrededor Deben ser repetibles e invariantes a escala y orientación Múltiples algoritmos de detección (SIFT, SURF, FAST, ORB) FAST: Destaca por su rapidez, muy utilizado para tiempo real

9 Extracción de información 8 Matching Utilizando descriptores (SIFT, SURF, ORB) Mediante comparación de parches: Diferencia de píxeles Color medio, conteo de colores, etc Suma de diferencias cuadráticas (SSD, ZSSD, etc)
10 MonoSLAM 9 MonoSLAM Siglas de Simultaneous Localization and Mapping Objetivos: Localización precisa de robots/cámaras en 3D Generación dinámica de mapas en 3D Funcionamiento en tiempo real (30FPS) Manejo de hasta puntos por iteración

11 MonoSLAM 10 Filtro de Kalman Estimación de estados basado en observaciones Sistemas lineales (KF) o no lineales (EKF) Vector de estados en MonoSLAM: Cámara: Posición, orientación, velocidad lineal y angular Para cada punto: Posición en 3D
12 MonoSLAM 11 Primera aproximación: Partiendo de puntos conocidos Arranque con al menos 4 puntos conocidos en 3D Detección de puntos con FAST Matching entre parches (11x11) Área de búsqueda depende de incertidumbre

13 MonoSLAM 12 Primera aproximación: Inicialización de puntos Se necesita desplazamiento de la cámara y varias observaciones Inicialización de una ĺınea en 3D con profundidad desconocida Sólo se inicializan puntos cercanos a los actuales Distribución de N partículas a lo largo de la ĺınea en 3D Se inserta el punto en el EKF sólo cuando haya poca incertidumbre

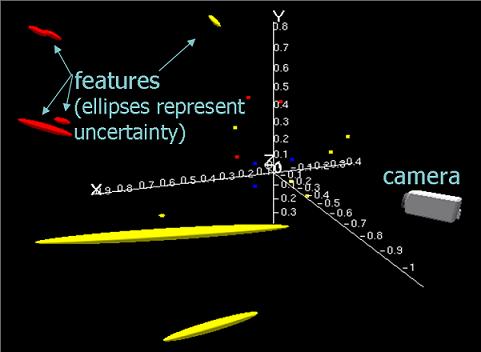
14 MonoSLAM 13
15 MonoSLAM 14 Puntos en el infinito: Inverse Depth Parametrization No necesita partir de puntos conocidos Pueden inicializarse puntos cercanos o lejanos (infinito) Puntos dentro del EKF desde su inicialización (mejora orientación) Problema: El mapa generado depende de la escala
16 MonoSLAM 15 Otras técnicas One-point RANSAC Active matching Búsqueda de estructuras de puntos Puntos dinámicos
17 PTAM 16 PTAM Siglas de Parallel Tracking and Mapping División del algoritmo en dos hilos (tracking y mapping) Tracking en tiempo real (30FPS) Mapas optimizados mediante Bundle Adjustment Cálculo de hasta 1000 puntos por iteración Permite relocalización
 Selección de puntos coplanares utilizando RANSAC x x x y = 1 x = Hx h 11 h 12 h 13 x x h 21 h 22 h 23 x y h 31 h 32 h")
18 PTAM 17 Inicialización por Homografía Homografía: Relaciona pares de puntos coplanares entre dos imágenes Permita obtener rotación y traslación a partir de H Obtención de puntos 3D por triangulación (dependientes de escala) Selección de puntos coplanares utilizando RANSAC x x x y = 1 x = Hx h 11 h 12 h 13 x x h 21 h 22 h 23 x y h 31 h 32 h 33 1
19 PTAM 18 Tracking Calcula la posición, orientación y velocidades de la cámara Detección de puntos con FAST y matching entre parches (8x8) Área de búsqueda fijo Pasos del algoritmo: Predicción de posición actual con modelo de movimiento Búsqueda de grano grueso (50 puntos) y grano fino (1000 puntos) Actualización de posición mediante Gauss-Newton Comprueba la calidad del tracking y si necesita relocalizarse
 Se obtienen nuevos puntos triangulando entre")
20 PTAM 19 Creación de nuevos puntos Se guardan determinados frames en memoria (KeyFrames) Se obtienen nuevos puntos triangulando entre KeyFrames
21 PTAM 20 Mapping Almacena puntos 3D (miles) y KeyFrames (cientos) No necesita funcionar en tiempo real Optimización de posiciones mediante Bundle Adjustment: Minimiza el error de reproyección entre puntos y frames

22 PTAM 21 Mejoras de PTAM vs MonoSLAM Maneja más puntos ( 100 veces más) La localización es más precisa El mapa generado es más realista Relocalización

23 SVO 22 SVO Siglas de Semi-Direct Monocular Visual Odometry Objetivo: Tiempo real usando procesadores poco potentes
24 SVO 23 Características Similitudes con PTAM: División del algoritmo en dos hilos (tracking y mapping) Inicialización mediante homografía Permite relocalización Diferencias con PTAM: Tracking con métodos directos Creación de puntos mediante profundidad inversa Tracking mucho más eficiente ( 100FPS) Autolocalización más precisa
 distribuidos en la imagen Regiones muy")
25 SVO 24 Tracking Método directo para estimar desplazamiento: Minimiza la diferencia de intensidad entre dos imágenes Uso de imagen completa o de puntos destacados Ideal para imágenes con poca textura o borrosas Aumento de precisión con matching de puntos: Pocos puntos ( ) distribuidos en la imagen Regiones muy pequeñas
26 SVO 25 Inicialización de puntos Puntos en el infinito: Inverse Depth Parametrization Profundidad actualizada fusionando densidades de probabilidad Sólo se añaden al mapa los puntos que convergen
27 SVO 26 Mapping Funcionamiento similar a PTAM Guarda puntos 3D y KeyFrames Pocos outliers Mapa menos denso pero más fiable Posibilidad de utilizar Bundle Adjustment
28 SVO 27 Mejoras de SVO vs PTAM Menor coste computacional Mayor precisión Puntos más fiables (pero menos puntos) Funciona en entornos con poca textura

29 Futuro próximo 28 Futuro próximo Realidad aumentada en móviles Modelado 3D Aplicaciones médicas Vehículos autónomos Hologramas

30 Futuro próximo (cont.) 29
31 Técnicas de autolocalización en 3D con visión monocular Eduardo Perdices Universidad Rey Juan Carlos 05 Abril 2016
ESTIMACIÓN N DE LA DISTANCIA RECORRIDA POR UN ROBOT MÓVIL M MEDIANTE LA UTILIZACIÓN N DE DESCRIPTORES SURF
 ESTIMACIÓN N DE LA DISTANCIA RECORRIDA POR UN ROBOT MÓVIL M MEDIANTE LA UTILIZACIÓN N DE DESCRIPTORES SURF Autor: Juan Manuel Peraza Domínguez Tutor: Dr. Luis Moreno Lorente Noviembre de 2009 1 ÍNDICE
ESTIMACIÓN N DE LA DISTANCIA RECORRIDA POR UN ROBOT MÓVIL M MEDIANTE LA UTILIZACIÓN N DE DESCRIPTORES SURF Autor: Juan Manuel Peraza Domínguez Tutor: Dr. Luis Moreno Lorente Noviembre de 2009 1 ÍNDICE
LOCALIZACIÓN Y MAPEO SIMULTÁNEO EN TIEMPO REAL, EMPLEANDO UNA CÁMARA MONOCULAR
 LOCALIZACIÓN Y MAPEO SIMULTÁNEO EN TIEMPO REAL, EMPLEANDO UNA CÁMARA MONOCULAR Presentado por: Ing. ANDRES ALEJANDRO DIAZ TORO Director: Dr. Eduardo Caicedo Bravo Asesor: Dra. Lina María Paz GRUPO DE INVESTIGACION
LOCALIZACIÓN Y MAPEO SIMULTÁNEO EN TIEMPO REAL, EMPLEANDO UNA CÁMARA MONOCULAR Presentado por: Ing. ANDRES ALEJANDRO DIAZ TORO Director: Dr. Eduardo Caicedo Bravo Asesor: Dra. Lina María Paz GRUPO DE INVESTIGACION
Técnicas de optimización en visión artificial
 Técnicas de optimización en visión artificial Alberto Martín, Francisco Rivas y JoseMaría Cañas Máster en Visión Artificial Alberto Martín, Francisco Rivas y JoseMaría Cañas Técnicas de optimización en
Técnicas de optimización en visión artificial Alberto Martín, Francisco Rivas y JoseMaría Cañas Máster en Visión Artificial Alberto Martín, Francisco Rivas y JoseMaría Cañas Técnicas de optimización en
Localización. CI-2657 Robótica M.Sc. Kryscia Ramírez Benavides
 M.Sc. Kryscia Ramírez Benavides Problemas de Navegación de los Robots Dónde estoy?. Dónde he estado? Mapa de decisiones. A dónde voy? Planificación de misiones. Cuál es la mejor manera de llegar? Planificación
M.Sc. Kryscia Ramírez Benavides Problemas de Navegación de los Robots Dónde estoy?. Dónde he estado? Mapa de decisiones. A dónde voy? Planificación de misiones. Cuál es la mejor manera de llegar? Planificación
Introducción a la Realidad Aumentada (parte II) Jairo R. Sánchez Tapia
 Jairo R. Sánchez Tapia") Introducción a la Realidad Aumentada (parte II) Jairo R. Sánchez Tapia Mar. 04 Motivación La Realidad Aumentada consiste en combinar objetos virtuales con imágenes tomadas del mundo real, creando sensación
Introducción a la Realidad Aumentada (parte II) Jairo R. Sánchez Tapia Mar. 04 Motivación La Realidad Aumentada consiste en combinar objetos virtuales con imágenes tomadas del mundo real, creando sensación
4.1 Introducción al filtrado adaptativo
 41 Introducción al filtrado adaptativo El problema del filtrado Clases básicas de estimación Filtrado adaptativo Estructuras de filtrado lineal Algoritmos Criterios para la elección del filtro adaptativo
41 Introducción al filtrado adaptativo El problema del filtrado Clases básicas de estimación Filtrado adaptativo Estructuras de filtrado lineal Algoritmos Criterios para la elección del filtro adaptativo
Sistema de apoyo al repostaje en vuelo basado en Visión artificial
 Sistema de apoyo al repostaje en vuelo basado en Visión artificial GRUPO DE PROCESADO MULTIMEDIA DEPARTAMENTO DE TEORÍA DE LA SEÑAL UNIVERSIDAD CARLOS III DE MADRID Objetivos del proyecto y propuesta de
Sistema de apoyo al repostaje en vuelo basado en Visión artificial GRUPO DE PROCESADO MULTIMEDIA DEPARTAMENTO DE TEORÍA DE LA SEÑAL UNIVERSIDAD CARLOS III DE MADRID Objetivos del proyecto y propuesta de
Reconstrucción 3D: Estéreo
 Reconstrucción 3D: Estéreo Lección 08.2 Dr. Pablo Alvarado Moya MP6127 Visión por Computadora Programa de Maestría en Electrónica Énfasis en Procesamiento Digital de Señales Escuela de Ingeniería Electrónica
Reconstrucción 3D: Estéreo Lección 08.2 Dr. Pablo Alvarado Moya MP6127 Visión por Computadora Programa de Maestría en Electrónica Énfasis en Procesamiento Digital de Señales Escuela de Ingeniería Electrónica
Trabajo Fin de Carrera
 Trabajo Fin de Carrera Evaluación de una herramienta de reconstrucción de estructura para su aplicación a vídeos tomados desde aviones no tripulados (UAV) David Núñez Clemente david.nunez.clemente@gmail.com
Trabajo Fin de Carrera Evaluación de una herramienta de reconstrucción de estructura para su aplicación a vídeos tomados desde aviones no tripulados (UAV) David Núñez Clemente david.nunez.clemente@gmail.com
PERCEPCIÓN AVANZADA MASTER EN Automática, Robótica y Telemática
 PERCEPCIÓN AVANZADA MASTER EN Automática, Robótica y Telemática Fusión Sensorial Dr. J. RAMIRO MARTINEZ DE DIOS 1/60 Fusión Sensorial Introducción Clasificación El problema de la asociación de datos Fusión
PERCEPCIÓN AVANZADA MASTER EN Automática, Robótica y Telemática Fusión Sensorial Dr. J. RAMIRO MARTINEZ DE DIOS 1/60 Fusión Sensorial Introducción Clasificación El problema de la asociación de datos Fusión
Introducción teórica del filtro de Kalman. a) el conocimiento del sistema y a dispositivos dinámicos de medida,
 el conocimiento del sistema y a dispositivos dinámicos de medida,") Apéndice B El Filtro de Kalman B.1. Introducción teórica del filtro de Kalman El Filtro de Kalman es una potente herramienta matemática que juega un importante papel cuando se incluyen medidas del mundo
Apéndice B El Filtro de Kalman B.1. Introducción teórica del filtro de Kalman El Filtro de Kalman es una potente herramienta matemática que juega un importante papel cuando se incluyen medidas del mundo
Contenido Capítulo 1 Introducción Capítulo 2 Conceptos Básicos Capítulo 3 Procesamiento de Imágenes en el Dominio Espacial
 Contenido Capítulo 1 Introducción 1.Introducción 1 1.1 Sistema Visual Humano 1 1.2 Modelo de Visión por Computadora 3 1.3 Procesamiento Digital de Imágenes 3 1.4 Definición de Imagen Digital 4 Problemas
Contenido Capítulo 1 Introducción 1.Introducción 1 1.1 Sistema Visual Humano 1 1.2 Modelo de Visión por Computadora 3 1.3 Procesamiento Digital de Imágenes 3 1.4 Definición de Imagen Digital 4 Problemas
Visión artificial y Robótica. Depto. de Ciencia de la Computación e Inteligencia Artificial
 Visión artificial y Robótica Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Sensores 3D Métodos de registro 3D Iterative Closest Points Sensores 3D Permiten obtener la información
Visión artificial y Robótica Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Sensores 3D Métodos de registro 3D Iterative Closest Points Sensores 3D Permiten obtener la información
Reconstrucción tridimensional de vasos sanguíneos de retina de humanos
 Reconstrucción tridimensional de vasos sanguíneos de retina de humanos Dra. María Elena Martínez Pérez Departamento de Ciencias de la Computación IIMAS-UNAM Colaboradores: Dr. Arturo Espinosa, M. en C.
Reconstrucción tridimensional de vasos sanguíneos de retina de humanos Dra. María Elena Martínez Pérez Departamento de Ciencias de la Computación IIMAS-UNAM Colaboradores: Dr. Arturo Espinosa, M. en C.
VISIÓN 3D. José M. Sebastián - Luis M. Jiménez. Problema Central de la Visión Artificial Tridimensional.
 VISIÓN 3D José M. Sebastián - Luis M. Jiménez Problema Central de la Visión Artificial Tridimensional. A partir de una imagen o de una secuencia de imágenes de un objeto estacionario o en movimiento, tomada
VISIÓN 3D José M. Sebastián - Luis M. Jiménez Problema Central de la Visión Artificial Tridimensional. A partir de una imagen o de una secuencia de imágenes de un objeto estacionario o en movimiento, tomada
Localización Simultánea a la Reconstrucción de Robots Móviles en Espacios Inteligentes mediante Múltiples Cámaras
 Localización Simultánea a la Reconstrucción de Robots Móviles en Espacios Inteligentes mediante Múltiples Cámaras Daniel Pizarro Perez, Enrique Santiso Gomez, Manuel Mazo Quintas Universidad de Alcalá/Departamento
Localización Simultánea a la Reconstrucción de Robots Móviles en Espacios Inteligentes mediante Múltiples Cámaras Daniel Pizarro Perez, Enrique Santiso Gomez, Manuel Mazo Quintas Universidad de Alcalá/Departamento
Revisado por: Director: Ing. Eddie Galarza. Realizado por: Luis Ernesto Caiza Andrango
 DISEÑO DE UNA APLICACIÓN INTERACTIVA QUE PERMITA ASISTIR AL CONDUCTOR EN EL RECONOCIMIENTO DE SEÑALES DE TRÁNSITO MEDIANTE PROCESAMIENTO DE IMÁGENES UTILIZANDO SOFTWARE LIBRE Y TECNOLOGÍA BEAGLEBONE. Realizado
DISEÑO DE UNA APLICACIÓN INTERACTIVA QUE PERMITA ASISTIR AL CONDUCTOR EN EL RECONOCIMIENTO DE SEÑALES DE TRÁNSITO MEDIANTE PROCESAMIENTO DE IMÁGENES UTILIZANDO SOFTWARE LIBRE Y TECNOLOGÍA BEAGLEBONE. Realizado
Visión. Sesión 3: Clasificación de imágenes mediante histogramas y características. Departamento CCIA
 Visión Sesión 3: Clasificación de imágenes mediante histogramas y características Departamento CCIA http://www.jtech.ua.es/vision/2011/ Hoy Aplicaciones: emparejamiento de imágenes, búsqueda de patrones
Visión Sesión 3: Clasificación de imágenes mediante histogramas y características Departamento CCIA http://www.jtech.ua.es/vision/2011/ Hoy Aplicaciones: emparejamiento de imágenes, búsqueda de patrones
Estéreo dinámico. Estéreo dinámico
 Estéreo dinámico 1 Vectores locales de desplazamiento Dada una secuencia de imagenes Tomadas a intervalos Movimiento absoluto: movimiento independiente de la cámara Movimiento relativo: movimiento debido
Estéreo dinámico 1 Vectores locales de desplazamiento Dada una secuencia de imagenes Tomadas a intervalos Movimiento absoluto: movimiento independiente de la cámara Movimiento relativo: movimiento debido
RECONSTRUCCIÓN TRIDIMENSIONAL DE ZONAS DE INTERÉS: EVALUACIÓN DE RGB-D SLAM
 RECONSTRUCCIÓN TRIDIMENSIONAL DE ZONAS DE INTERÉS: EVALUACIÓN DE RGB-D SLAM PENNA-SALCEDO, Jhonny CARDENAS-QUIROGA, Adriana SIABATO, Willington ALONSO-ZÁRATE, Karen Lorena INTRODUCCIÓN En los últimos años,
RECONSTRUCCIÓN TRIDIMENSIONAL DE ZONAS DE INTERÉS: EVALUACIÓN DE RGB-D SLAM PENNA-SALCEDO, Jhonny CARDENAS-QUIROGA, Adriana SIABATO, Willington ALONSO-ZÁRATE, Karen Lorena INTRODUCCIÓN En los últimos años,
VISIÓN POR COMPUTADOR
 VISIÓN POR COMPUTADOR Introducción Ingeniería de Sistemas y Automática Universidad Miguel Hernández Tabla de Contenidos 2 Definición de Visión por Computador Captación Información Luminosa Imagen Digital
VISIÓN POR COMPUTADOR Introducción Ingeniería de Sistemas y Automática Universidad Miguel Hernández Tabla de Contenidos 2 Definición de Visión por Computador Captación Información Luminosa Imagen Digital
Seguimiento de Objetos en Secuencias de Imágenes. Juan J. Pantrigo
 Seguimiento de Objetos en Secuencias de Imágenes Juan J. Pantrigo juanjose.pantrigo@urjc.es Índice 1. Introducción 2. Modelado en seguimiento visual 3. Extracción de características 4. Algoritmos de seguimiento
Seguimiento de Objetos en Secuencias de Imágenes Juan J. Pantrigo juanjose.pantrigo@urjc.es Índice 1. Introducción 2. Modelado en seguimiento visual 3. Extracción de características 4. Algoritmos de seguimiento
Universidad Pontificia Bolivariana. Escuela de Ingenierías. Centro Ciencia Básica
 Universidad Pontificia Bolivariana. Escuela de Ingenierías. Centro Ciencia Básica Curso: Fundamentos de mecánica. 2015 20 Programación por semanas (teoría y práctica) Texto de apoyo Serway-Jewtt novena
Universidad Pontificia Bolivariana. Escuela de Ingenierías. Centro Ciencia Básica Curso: Fundamentos de mecánica. 2015 20 Programación por semanas (teoría y práctica) Texto de apoyo Serway-Jewtt novena
SLAM VISUAL: Navegación Robótica a partir de Imágenes
 VISUAL: Navegación Robótica a partir de Imágenes Oscar Reinoso García (o.reinoso@umh.es) Universidad Miguel Hernández de Elche 18 - Abril - 2016 Introducción - Resolución del problema de El problema de
VISUAL: Navegación Robótica a partir de Imágenes Oscar Reinoso García (o.reinoso@umh.es) Universidad Miguel Hernández de Elche 18 - Abril - 2016 Introducción - Resolución del problema de El problema de
Capítulo 2 Métodos de localización.
 Capítulo Métodos de localización..1 Introducción. Existen diversas técnicas que tratan de resolver el problema de la localización de robots móviles, los métodos presentados en este capitulo no necesitan
Capítulo Métodos de localización..1 Introducción. Existen diversas técnicas que tratan de resolver el problema de la localización de robots móviles, los métodos presentados en este capitulo no necesitan
Localización local y global integrando información visual y de rango para robots móviles en ambientes no estacionarios. Josué Sánchez Texis
 Localización local y global integrando información visual y de rango para robots móviles en ambientes no estacionarios Josué Sánchez Texis 24 de febrero de 2009 Contenido Resumen 1 1. Introducción 2 1.1.
Localización local y global integrando información visual y de rango para robots móviles en ambientes no estacionarios Josué Sánchez Texis 24 de febrero de 2009 Contenido Resumen 1 1. Introducción 2 1.1.
DESCRIPCIÓN DEL RESULTADO DE INVESTIGACIÓN
 REF.: TRANSP_UAH_01 SECTOR INDUSTRIAL INVESTIGADOR DEPARTAMENTO DATOS DE CONTACTO PÁGINA WEB Industria y Transporte Luis Miguel Bergasa Pascual Electrónica + 34 91 885 65 69 + 34 91 885 65 41 @ luism.bergasa@uah.es
REF.: TRANSP_UAH_01 SECTOR INDUSTRIAL INVESTIGADOR DEPARTAMENTO DATOS DE CONTACTO PÁGINA WEB Industria y Transporte Luis Miguel Bergasa Pascual Electrónica + 34 91 885 65 69 + 34 91 885 65 41 @ luism.bergasa@uah.es
Doctorado en Tecnologías de las Comunicaciones - Procesado Digital de Señales en Comunicaciones (Curso 2003/04)
") 4.6 El filtro de Kalman Introducción Filtro de Kalman discreto Algoritmo: predicción + corrección Características probabilísticas El filtro de Kalman extendido Filtros de Partículas Conclusiones Introducción
4.6 El filtro de Kalman Introducción Filtro de Kalman discreto Algoritmo: predicción + corrección Características probabilísticas El filtro de Kalman extendido Filtros de Partículas Conclusiones Introducción
Visión 3D en robots móviles
 José María Cañas Plaza http://gsyc.escet.urjc.es/jmplaza III Jornadas de robótica URJC, 17 octubre 2006 Contenidos 1 Contenidos Introducción Localización de objetos Reconstrucción 3D Fusión sensorial Atención
José María Cañas Plaza http://gsyc.escet.urjc.es/jmplaza III Jornadas de robótica URJC, 17 octubre 2006 Contenidos 1 Contenidos Introducción Localización de objetos Reconstrucción 3D Fusión sensorial Atención
Algoritmos de visión para plataformas mini-humanoide de competición con capacidades aumentadas
 Algoritmos de visión para plataformas mini-humanoide de competición con capacidades aumentadas Máster en Robótica y Automatización Trabajo de Fin de Máster Franklin Eduardo Samaniego Riera. 100294139@alumnos.uc3m.es
Algoritmos de visión para plataformas mini-humanoide de competición con capacidades aumentadas Máster en Robótica y Automatización Trabajo de Fin de Máster Franklin Eduardo Samaniego Riera. 100294139@alumnos.uc3m.es
LIM. Integración mediante filtro de Kalman de sensores inerciales y GPS para la estimación de la posición de un vehículo. Trabajo fin de Grado
 Trabajo fin de Grado Integración mediante filtro de Kalman de sensores inerciales y GPS para la estimación de la posición de un vehículo Autor: Alejandro Vázquez Fraga Tutores: Miguel Ángel Naya Villaverde
Trabajo fin de Grado Integración mediante filtro de Kalman de sensores inerciales y GPS para la estimación de la posición de un vehículo Autor: Alejandro Vázquez Fraga Tutores: Miguel Ángel Naya Villaverde
Trabajo Fin de Grado. Evaluación de ORBSLAM en Secuencias de Endoscopia Médica
 Trabajo Fin de Grado Evaluación de ORBSLAM en Secuencias de Endoscopia Médica Autor Iñigo Cirauqui Viloria Director Jose María Martínez Montiel Departamento de Informática e Ingeniería de Sistemas Escuela
Trabajo Fin de Grado Evaluación de ORBSLAM en Secuencias de Endoscopia Médica Autor Iñigo Cirauqui Viloria Director Jose María Martínez Montiel Departamento de Informática e Ingeniería de Sistemas Escuela
Percepción visual aplicada a la robótica
 Percepción visual aplicada a la robótica Mario I. Chacón Murguía Rafael Sandoval Rodríguez Javier Vega Pineda Selecciona el libro para empezar Capítulo 2 Teoría de robótica Continuar Cinemática de robots
Percepción visual aplicada a la robótica Mario I. Chacón Murguía Rafael Sandoval Rodríguez Javier Vega Pineda Selecciona el libro para empezar Capítulo 2 Teoría de robótica Continuar Cinemática de robots
Técnicas de análisis y evaluación de procesos de reconstrucción 3D en el ámbito de la localización por visión
 E.T.S. de Ingeniería Industrial, Informática y de Telecomunicación Técnicas de análisis y evaluación de procesos de reconstrucción 3D en el ámbito de la localización por visión Grado en Ingeniería en Tecnologías
E.T.S. de Ingeniería Industrial, Informática y de Telecomunicación Técnicas de análisis y evaluación de procesos de reconstrucción 3D en el ámbito de la localización por visión Grado en Ingeniería en Tecnologías
= v. = v. Restricciones geométricas. Restricciones geométricas. Restricciones geométricas. Restricciones de consistencia. m 1 m 2.
 Índice Introducción Qué es la visión estereoscópica? Geometría de un sistema binocular Geometría de la proyección Geometría binocular. Matriz fundamental Rectificación 9 Restricciones Métodos de correspondencia
Índice Introducción Qué es la visión estereoscópica? Geometría de un sistema binocular Geometría de la proyección Geometría binocular. Matriz fundamental Rectificación 9 Restricciones Métodos de correspondencia
Trabajo Fin de Grado. Estudio de técnica de generación de modelos 3D a partir de secuencias de imágenes
 ESCUELA TÉCNICA SUPERIOR DE INGENIEROS INDUSTRIALES Y DE TELECOMUNICACIÓN UNIVERSIDAD DE CANTABRIA Trabajo Fin de Grado Estudio de técnica de generación de modelos 3D a partir de secuencias de imágenes
ESCUELA TÉCNICA SUPERIOR DE INGENIEROS INDUSTRIALES Y DE TELECOMUNICACIÓN UNIVERSIDAD DE CANTABRIA Trabajo Fin de Grado Estudio de técnica de generación de modelos 3D a partir de secuencias de imágenes
Capítulo 1 Introducción.
 Capítulo 1 Introducción. 1.1 Introducción. La robótica móvil es un área de intensa investigación cuyo objetivo principal es el desarrollo de robots autónomos que puedan desenvolverse en ambientes dinámicos
Capítulo 1 Introducción. 1.1 Introducción. La robótica móvil es un área de intensa investigación cuyo objetivo principal es el desarrollo de robots autónomos que puedan desenvolverse en ambientes dinámicos
Grado en Ingeniería Informática Proyecto Fin de Grado. Autor: Juan Carlos Ortega Pérez Directores: Sergio Escalera y Miguel Ángel Bautista
 Grado en Ingeniería Informática Proyecto Fin de Grado Autor: Juan Carlos Ortega Pérez Directores: Sergio Escalera y Miguel Ángel Bautista Introducción. Contexto y Motivación. Procesamiento de la BD HuPBA.
Grado en Ingeniería Informática Proyecto Fin de Grado Autor: Juan Carlos Ortega Pérez Directores: Sergio Escalera y Miguel Ángel Bautista Introducción. Contexto y Motivación. Procesamiento de la BD HuPBA.
6DOF LOCALIZACIÓN Y MAPEADO SIMULTÁNEO (SLAM) EN TIEMPO REAL MEDIANTE CÁMARA ESTÉREO MOVIDA CON LA MANO
 EN TIEMPO REAL MEDIANTE CÁMARA ESTÉREO MOVIDA CON LA MANO") UNIVERSIDAD DE ALCALÁ Escuela Politécnica Superior Departamento de Electrónica Máster Oficial en Sistemas Electrónicos Avanzados. Sistemas Inteligentes Tesis de Máster 6DOF LOCALIZACIÓN Y MAPEADO SIMULTÁNEO
UNIVERSIDAD DE ALCALÁ Escuela Politécnica Superior Departamento de Electrónica Máster Oficial en Sistemas Electrónicos Avanzados. Sistemas Inteligentes Tesis de Máster 6DOF LOCALIZACIÓN Y MAPEADO SIMULTÁNEO
Estéreo estático. Derivadas segundas obtenidas en direcciones distintas sobre el mismo borde
 Derivadas segundas obtenidas en direcciones distintas sobre el mismo borde Marr propuso la detección de variaciones en la intensidad de la imagen (bordes) como bosquejo primordial. Se observa que corresponde
Derivadas segundas obtenidas en direcciones distintas sobre el mismo borde Marr propuso la detección de variaciones en la intensidad de la imagen (bordes) como bosquejo primordial. Se observa que corresponde
[20380] Visió per Computador Prueba 2 (2016) [A] Teoria (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada)
![[20380] Visió per Computador Prueba 2 (2016) [A] Teoria (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada)](/thumbs/82/85898243.jpg "[20380] Visió per Computador Prueba 2 (2016) [A] Teoria (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada)") 102784 [20380] Visió per Computador Prueba 2 (2016) [A] Teoria (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada) 1. Queremos reducir la distorsión de barril introducida por el sistema
102784 [20380] Visió per Computador Prueba 2 (2016) [A] Teoria (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada) 1. Queremos reducir la distorsión de barril introducida por el sistema
Seguimiento y relocalización de una cámara monocular en mapas densos tridimensionales.
 TRABAJO FIN DE GRADO DE INGENIERÍA INFORMÁTICA Seguimiento y relocalización de una cámara monocular en mapas densos tridimensionales. Directores Javier Civera Sancho (dir) Luis Montesano del Campo (codir)
TRABAJO FIN DE GRADO DE INGENIERÍA INFORMÁTICA Seguimiento y relocalización de una cámara monocular en mapas densos tridimensionales. Directores Javier Civera Sancho (dir) Luis Montesano del Campo (codir)
Tesis de Máster. Alejandro Legrá Rios. Directores: Javier Macías Guarasa & Daniel Pizarro Pérez
 Tesis de Máster Estudio, implementación y evaluación de un sistema de localización de locutores basado en el modelado de arrays de micrófonos como cámaras de perspectiva Alejandro Legrá Rios Directores:
Tesis de Máster Estudio, implementación y evaluación de un sistema de localización de locutores basado en el modelado de arrays de micrófonos como cámaras de perspectiva Alejandro Legrá Rios Directores:
RECONOCIMIENTO DE RUTAS DE ESCALADA EN PAREDES DE PIEDRA
 RECONOCIMIENTO DE RUTAS DE ESCALADA EN PAREDES DE PIEDRA PROCESAMIENTO DE IMÁGENES DIGITALES Curso 2013/2014 Carlos Falgueras García David Solís Martín Adrián Fernández Sola 1. Introducción Existen varios
RECONOCIMIENTO DE RUTAS DE ESCALADA EN PAREDES DE PIEDRA PROCESAMIENTO DE IMÁGENES DIGITALES Curso 2013/2014 Carlos Falgueras García David Solís Martín Adrián Fernández Sola 1. Introducción Existen varios
Estudio del estado del arte del SLAM e implementación de una plataforma exible
 Presentación del Estudio del estado del arte del e implementación de una plataforma exible M. Llofriu F. Andrade Instituto de Computación Facultad de Ingeniería Universidad de la República Tutores: Msc.
Presentación del Estudio del estado del arte del e implementación de una plataforma exible M. Llofriu F. Andrade Instituto de Computación Facultad de Ingeniería Universidad de la República Tutores: Msc.
A L G O R I T M O S D E M A P E A D O 3 D. 5.1 introducción
 A L G O R I T M O S D E M A P E A D O 3 D 5 5.1 introducción A continuación se presentan los diferentes algoritmos que componen cada una de las partes que se ocupan de la generación de mapas 3D. Típicamente,
A L G O R I T M O S D E M A P E A D O 3 D 5 5.1 introducción A continuación se presentan los diferentes algoritmos que componen cada una de las partes que se ocupan de la generación de mapas 3D. Típicamente,
Planificaciones Seminario de Electrónica II. Docente responsable: MAS IGNACIO AGUSTÍN. 1 de 5
 Planificaciones 6666 - Seminario de Electrónica II Docente responsable: MAS IGNACIO AGUSTÍN 1 de 5 OBJETIVOS El objetivo de este curso es que el alumno: - adquiera los conceptos básicos de estado del arte
Planificaciones 6666 - Seminario de Electrónica II Docente responsable: MAS IGNACIO AGUSTÍN 1 de 5 OBJETIVOS El objetivo de este curso es que el alumno: - adquiera los conceptos básicos de estado del arte
Detección y cierre de ciclos en sistemas SLAM basados en visión estéreo
 Universidad de Buenos Aires Facultad de Ciencias Exactas y Naturales Departamento de Computación Detección y cierre de ciclos en sistemas SLAM basados en visión estéreo Tesis presentada para optar al título
Universidad de Buenos Aires Facultad de Ciencias Exactas y Naturales Departamento de Computación Detección y cierre de ciclos en sistemas SLAM basados en visión estéreo Tesis presentada para optar al título
PFC: Localización de robots mediante filtro de Kalman
 6.- FILTRO DE KALMAN 6.1.- MOTIVACIÓN Los sistemas de navegación se han convertido en un estándar, ya que se venden más y más, sobre todo con los coches nuevos. La mayoría de estos sistemas de navegación
6.- FILTRO DE KALMAN 6.1.- MOTIVACIÓN Los sistemas de navegación se han convertido en un estándar, ya que se venden más y más, sobre todo con los coches nuevos. La mayoría de estos sistemas de navegación
Reconocimiento visual de ademanes usando MS Kinect - Introducción. Dr. Héctor Avilés Escuela de Invierno de Robótica 2015
 Reconocimiento visual de ademanes usando MS Kinect - Introducción Dr. Héctor Avilés Escuela de Invierno de Robótica 2015 Contenido Motivación Dispositivos de captura Reconocimiento visual de ademanes Resumen
Reconocimiento visual de ademanes usando MS Kinect - Introducción Dr. Héctor Avilés Escuela de Invierno de Robótica 2015 Contenido Motivación Dispositivos de captura Reconocimiento visual de ademanes Resumen
Posicionamiento indoor con señales de WiFi
 Posicionamiento indoor con señales de WiFi Claudio Avallone, Germán Capdehourat Tratamiento Estadístico de Señales Curso 2010 Outline 1 Introducción 2 Estimación de la posición basada en huellas 3 Escenario
Posicionamiento indoor con señales de WiFi Claudio Avallone, Germán Capdehourat Tratamiento Estadístico de Señales Curso 2010 Outline 1 Introducción 2 Estimación de la posición basada en huellas 3 Escenario
Grupo de Procesamiento de Imágenes y Visión por Computadora
 Grupo de Procesamiento de Imágenes y Visión por Computadora Daniel Acevedo Marta Mejail Francisco Gómez Fernández Julio Jacobo María Elena Buemi Rosana Matuk Carlos Ismael Orozco Pablo Negri Esteban Uriza
Grupo de Procesamiento de Imágenes y Visión por Computadora Daniel Acevedo Marta Mejail Francisco Gómez Fernández Julio Jacobo María Elena Buemi Rosana Matuk Carlos Ismael Orozco Pablo Negri Esteban Uriza
Trabajo Fin de Máster Máster en Ingeniería Industrial
 Trabajo Fin de Máster Máster en Ingeniería Industrial Análisis de algoritmos para localización y mapeado simultáneo de objetos Autor: Patricia López Torres Tutores: Begoña C. Arrue Ullés Dep. de Ingeniería
Trabajo Fin de Máster Máster en Ingeniería Industrial Análisis de algoritmos para localización y mapeado simultáneo de objetos Autor: Patricia López Torres Tutores: Begoña C. Arrue Ullés Dep. de Ingeniería
Odometría Visual para Robots Móviles Utilizando Smartphones como Unidad de Sensado y Procesamiento
 Odometría Visual para Robots Móviles Utilizando Smartphones como Unidad de Sensado y Procesamiento Lic. Sergio Gonzalez Email: segonzalez@dc.uba.ar Lic. Emiliano Gonzalez Email: edgonzalez@dc.uba.ar Lic.
Odometría Visual para Robots Móviles Utilizando Smartphones como Unidad de Sensado y Procesamiento Lic. Sergio Gonzalez Email: segonzalez@dc.uba.ar Lic. Emiliano Gonzalez Email: edgonzalez@dc.uba.ar Lic.
Figura 1: Propiedades de textura: (a) Suavidad, (b) Rugosidad y (c) Regularidad
 Suavidad, (b) Rugosidad y (c) Regularidad") 3 TEXTURA 3.1 CONCEPTO DE LA TEXTURA La textura es una característica importante utilizada en segmentación, identificación de objetos o regiones de interés en una imagen y obtención de forma. El uso de
3 TEXTURA 3.1 CONCEPTO DE LA TEXTURA La textura es una característica importante utilizada en segmentación, identificación de objetos o regiones de interés en una imagen y obtención de forma. El uso de
Identificación n de SIStemas
 Identificación n de SIStemas Métodos de Estimación n Recursivos ISIS J. C. Gómez Métodos de Identificación n Recursivos Mínimos Cuadrados Recursivos ara una estructura de modelo de regresión lineal y n
Identificación n de SIStemas Métodos de Estimación n Recursivos ISIS J. C. Gómez Métodos de Identificación n Recursivos Mínimos Cuadrados Recursivos ara una estructura de modelo de regresión lineal y n
Animación 3D por Computador I
 20 de mayo de 2011 Animación y Simulación ¾Qué es animación por computador? A partir de una escena con un número dado de objetos, hacer cambiar su posición en el tiempo de acuerdo a acciones preestablecidas
20 de mayo de 2011 Animación y Simulación ¾Qué es animación por computador? A partir de una escena con un número dado de objetos, hacer cambiar su posición en el tiempo de acuerdo a acciones preestablecidas
Estratigrafía Series de tiempo Tomogramas Descripción del gasto sólido de fondo
 Tabla de contenido 1. Capítulo: Introducción y Objetivos... 1 1.1. Introducción... 2 1.2. Objetivos... 3 1.3. Organización... 4 2. Capítulo: Marco Teórico... 5 2.1. Tomógrafo... 6 2.1.1. Descripción general...
Tabla de contenido 1. Capítulo: Introducción y Objetivos... 1 1.1. Introducción... 2 1.2. Objetivos... 3 1.3. Organización... 4 2. Capítulo: Marco Teórico... 5 2.1. Tomógrafo... 6 2.1.1. Descripción general...
DESCRIPCIÓN DEL RESULTADO DE INVESTIGACIÓN
 REF.: BIO_UAH_13 SECTOR INDUSTRIAL INVESTIGADOR DEPARTAMENTO DATOS DE CONTACTO PÁGINA WEB Ciencias de la Salud Luis Miguel Bergasa Pascual Electrónica + 34 91 885 65 69 + 34 91 885 65 41 @ luism.bergasa@uah.es
REF.: BIO_UAH_13 SECTOR INDUSTRIAL INVESTIGADOR DEPARTAMENTO DATOS DE CONTACTO PÁGINA WEB Ciencias de la Salud Luis Miguel Bergasa Pascual Electrónica + 34 91 885 65 69 + 34 91 885 65 41 @ luism.bergasa@uah.es
Filtro de Partículas Luca Martino Juan Santaella Vallejo Tratamiento Digital de Señales Master Interuniversitario en Comunicaciones y Multimedia
 Filtro de Partículas Luca Martino Juan Santaella Vallejo Tratamiento Digital de Señales Master Interuniversitario en Comunicaciones y Multimedia luca@tsc.uc3m.es jsantaella@gmail.com INDICE 1. Introducción...3
Filtro de Partículas Luca Martino Juan Santaella Vallejo Tratamiento Digital de Señales Master Interuniversitario en Comunicaciones y Multimedia luca@tsc.uc3m.es jsantaella@gmail.com INDICE 1. Introducción...3
Visión de Alto Nivel. Dr. Luis Enrique Sucar INAOE. ccc.inaoep.mx/~esucar Sesión 5 Representación y Reconocimiento
 Visión de Alto Nivel Dr. Luis Enrique Sucar INAOE esucar@inaoep.mx ccc.inaoep.mx/~esucar Sesión 5 Representación y Reconocimiento 1 Visión de Alto Nivel orillas Representación del mundo textura color Descripción
Visión de Alto Nivel Dr. Luis Enrique Sucar INAOE esucar@inaoep.mx ccc.inaoep.mx/~esucar Sesión 5 Representación y Reconocimiento 1 Visión de Alto Nivel orillas Representación del mundo textura color Descripción
DIPLOMADO INTELIGENCIA ARTIFICIAL con Aplicación en Robots Móviles FACULTAD DE INGENIERÍA 2018
 DIPLOMADO INTELIGENCIA ARTIFICIAL con Aplicación en Robots Móviles FACULTAD DE INGENIERÍA 2018 CONTENIDO Introducción Módulos Procedimiento de inscripción, Costos Fechas Importantes Dudas INTRODUCCIÓN
DIPLOMADO INTELIGENCIA ARTIFICIAL con Aplicación en Robots Móviles FACULTAD DE INGENIERÍA 2018 CONTENIDO Introducción Módulos Procedimiento de inscripción, Costos Fechas Importantes Dudas INTRODUCCIÓN
Francisco J. Hernández López
 Francisco J. Hernández López fcoj23@cimat.mx La salida de un algoritmo de seguimiento de objetos depende de la aplicación y la representación utilizada para describir el objeto que se desea seguir, dicha
Francisco J. Hernández López fcoj23@cimat.mx La salida de un algoritmo de seguimiento de objetos depende de la aplicación y la representación utilizada para describir el objeto que se desea seguir, dicha
Toma de datos con el brazo robotizado
 El proyecto SICEMAM en el que participa el Grupo TIDOP de la Universidad de Salamanca trabaja en el desarrollo de un sistema de Realidad Aumentada para asistir en el mantenimiento de la flota aérea militar
El proyecto SICEMAM en el que participa el Grupo TIDOP de la Universidad de Salamanca trabaja en el desarrollo de un sistema de Realidad Aumentada para asistir en el mantenimiento de la flota aérea militar
Desayuno Tecnológico: Tendencias y Herramientas de Video Inteligente en Seguridad Física
 Desayuno Tecnológico: Tendencias y Herramientas de Video Inteligente en Seguridad Física Áreas Tecnológicas Biometría: Identificación y autenticación de seres vivos a través de una o varias características
Desayuno Tecnológico: Tendencias y Herramientas de Video Inteligente en Seguridad Física Áreas Tecnológicas Biometría: Identificación y autenticación de seres vivos a través de una o varias características
Reconocimiento de objetos en escenas complejas para aplicaciones de realidad aumentada
 Reconocimiento de objetos en escenas complejas para aplicaciones de realidad aumentada M.Cs Mario G. Canul Ku mariocanul@cimat.mx Dr. Diego Jiménez Badillo diego_jimenez@inah.gob.mx Dr. Salvador Ruiz Correa
Reconocimiento de objetos en escenas complejas para aplicaciones de realidad aumentada M.Cs Mario G. Canul Ku mariocanul@cimat.mx Dr. Diego Jiménez Badillo diego_jimenez@inah.gob.mx Dr. Salvador Ruiz Correa
ANEXO N 4. Algoritmo de Flujo Óptico
 ANEXO N 4 Algoritmo de Flujo Óptico Para la realización del proyecto era necesaria la implementación de algoritmos de detección de movimiento y seguimiento del mismo, por ejemplo al tener un fondo definido
ANEXO N 4 Algoritmo de Flujo Óptico Para la realización del proyecto era necesaria la implementación de algoritmos de detección de movimiento y seguimiento del mismo, por ejemplo al tener un fondo definido
Sistema para captura y procesamiento de video y fotografia aerea para drones y aviones ligeros
 Sistema para captura y procesamiento de video y fotografia aerea para drones y aviones ligeros (Avances del 1er año) Jose Martinez-Carranza Investigador Titular A Royal Society-Newton Advanced Fellowship
Sistema para captura y procesamiento de video y fotografia aerea para drones y aviones ligeros (Avances del 1er año) Jose Martinez-Carranza Investigador Titular A Royal Society-Newton Advanced Fellowship
Técnicas de inteligencia artificial. Visión Artificial Extracción de características
 Técnicas de inteligencia artificial Visión Artificial Extracción de características Indice Transformada de Hough Características: SIFT Transformada de Hough Fundamentos: Motivación: Desarrollar técnicas
Técnicas de inteligencia artificial Visión Artificial Extracción de características Indice Transformada de Hough Características: SIFT Transformada de Hough Fundamentos: Motivación: Desarrollar técnicas
Ver para aprender y. Eduardo Morales, Hugo Jair Escalante
 Ver para aprender y aprender a ver Eduardo Morales, Hugo Jair Escalante Hugo Jair Escalante, Eduardo Morales. Ver para aprender y aprender a ver: sinergias entre aprendizaje automático y visión computacional.
Ver para aprender y aprender a ver Eduardo Morales, Hugo Jair Escalante Hugo Jair Escalante, Eduardo Morales. Ver para aprender y aprender a ver: sinergias entre aprendizaje automático y visión computacional.
UNIVERSIDAD DEL VALLE DE MÉXICO PROGRAMA DE ESTUDIO DE LICENCIATURA PRAXIS MES XXI
 UNIVERSIDAD DEL VALLE DE MÉXICO PROGRAMA DE ESTUDIO DE LICENCIATURA PRAXIS MES XXI NOMBRE DE LA ASIGNATURA: RECONOCIMIENTO DE PATRONES FECHA DE ELABORACIÓN: MARZO 2005 ÁREA DEL PLAN DE ESTUDIOS: AS ( )
UNIVERSIDAD DEL VALLE DE MÉXICO PROGRAMA DE ESTUDIO DE LICENCIATURA PRAXIS MES XXI NOMBRE DE LA ASIGNATURA: RECONOCIMIENTO DE PATRONES FECHA DE ELABORACIÓN: MARZO 2005 ÁREA DEL PLAN DE ESTUDIOS: AS ( )
Dinámica del Robot. UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides
 UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción La dinámica se ocupa de la relación entre las fuerzas que actúan sobre un cuerpo y el movimiento en el que se origina.
UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción La dinámica se ocupa de la relación entre las fuerzas que actúan sobre un cuerpo y el movimiento en el que se origina.
Integración con Rhino V-Ray para Rhino 1.5 compatible con la versión de 32 bits de Rhino 4.0 y las versiones de 32 y 64 bits de Rhino 5.0.
 V-Ray para Rhino 1.5 incluye muchas características nuevas y mejoras, incluyendo representación en tiempo real con V-Ray RT, optimización de imágenes basadas en luz con el nuevo Domo de Luz, y la gestión
V-Ray para Rhino 1.5 incluye muchas características nuevas y mejoras, incluyendo representación en tiempo real con V-Ray RT, optimización de imágenes basadas en luz con el nuevo Domo de Luz, y la gestión
4 Localización de terremotos
 4 Localización de terremotos El epicentro (λ,φ) o(x,y) El hipocentro (λ,φ,z,t) o(x,y,z,t) El área de ruptura que tiene un desplazamiento de D(x,t) Queremos obtener h(x,t). Tenemos: (i) la identificación
4 Localización de terremotos El epicentro (λ,φ) o(x,y) El hipocentro (λ,φ,z,t) o(x,y,z,t) El área de ruptura que tiene un desplazamiento de D(x,t) Queremos obtener h(x,t). Tenemos: (i) la identificación
Tema 5. Detección de bordes
 1 Div. Ingeniería de Sistemas y Automática Universidad Miguel Hernández GRUPO DE TECNOLOGÍA INDUSTRIAL Tabla de Contenidos Deinición de Borde Extracción de Bordes Comparación de Funciones Locales Comparación
1 Div. Ingeniería de Sistemas y Automática Universidad Miguel Hernández GRUPO DE TECNOLOGÍA INDUSTRIAL Tabla de Contenidos Deinición de Borde Extracción de Bordes Comparación de Funciones Locales Comparación
Morfometría Geométrica
 Escuela Tecnología Medica Facultad de Medicina Universidad de Chile Morfometría Geométrica Curso Fotografía Médica Prof. Alejandra García Prof. Karina Palma Morfometría Geométrica (MG) Métodos relacionados
Escuela Tecnología Medica Facultad de Medicina Universidad de Chile Morfometría Geométrica Curso Fotografía Médica Prof. Alejandra García Prof. Karina Palma Morfometría Geométrica (MG) Métodos relacionados
Smartphones como Unidad de Sensado y Procesamiento para la Localización de Robots Móviles Utilizando Odometría Visual Monocular
 Junio 2013 Tesis de Licenciatura Smartphones como Unidad de Sensado y Procesamiento para la Localización de Robots Móviles Utilizando Odometría Visual Monocular González, Emiliano Gonzalez, Sergio 426/06
Junio 2013 Tesis de Licenciatura Smartphones como Unidad de Sensado y Procesamiento para la Localización de Robots Móviles Utilizando Odometría Visual Monocular González, Emiliano Gonzalez, Sergio 426/06
Reconstrucción Tridimensional a Partir de Varias Imágenes
 Reconstrucción Tridimensional a Partir de Varias Imágenes Dr. Luis Gerardo de la Fraga E-mail: fraga@cs.cinvestav.mx Sección de Computación Departamento de Ingeniería Eléctrica CINVESTAV 22 de noviembre,
Reconstrucción Tridimensional a Partir de Varias Imágenes Dr. Luis Gerardo de la Fraga E-mail: fraga@cs.cinvestav.mx Sección de Computación Departamento de Ingeniería Eléctrica CINVESTAV 22 de noviembre,
Introducción a las wavelets y sus aplicaciones al procesamiento de imágenes
 Introducción a las wavelets y sus aplicaciones al procesamiento de imágenes Ana Ruedin Departamento de Computación, ECImag 2008 Facultad de Ciencias Exactas y Naturales, Universidad de Buenos Aires 1.
Introducción a las wavelets y sus aplicaciones al procesamiento de imágenes Ana Ruedin Departamento de Computación, ECImag 2008 Facultad de Ciencias Exactas y Naturales, Universidad de Buenos Aires 1.
1. Sistemas Lineales e Invariantes a la Traslación 1.1 Motivación de las imágenes digitales Qué es una imagen digital? Sistema: Suma: Escalamiento:
 1. Sistemas Lineales e Invariantes a la Traslación 1.1 Motivación de las imágenes digitales 1.2 Sistemas lineales 1.2.1 Ejemplo de Sistemas Lineales Qué es una imagen digital? a) Sistema: un sistema realiza
1. Sistemas Lineales e Invariantes a la Traslación 1.1 Motivación de las imágenes digitales 1.2 Sistemas lineales 1.2.1 Ejemplo de Sistemas Lineales Qué es una imagen digital? a) Sistema: un sistema realiza
MASTER UNIVERSITARIO EN ROBÓTICA
 Universidad Miguel Hernández de Elche MASTER UNIVERSITARIO EN ROBÓTICA Localización de un robot móvil mediante visión por computador ante grandes cambios de iluminación Trabajo de Fin de Máster Curso académico
Universidad Miguel Hernández de Elche MASTER UNIVERSITARIO EN ROBÓTICA Localización de un robot móvil mediante visión por computador ante grandes cambios de iluminación Trabajo de Fin de Máster Curso académico
UN SISTEMA DE VIDEO VIGILANCIA PARA DETECCIÓN DE CAÍDAS
 UNIVERSIDAD DE MÁLAGA ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA INFORMÁTICA INGENIERÍA SUPERIOR EN INFORMÁTICA ANTEPROYECTO UN SISTEMA DE VIDEO VIGILANCIA PARA DETECCIÓN DE CAÍDAS DIRECTOR DEL PROYECTO: FIRMA:
UNIVERSIDAD DE MÁLAGA ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA INFORMÁTICA INGENIERÍA SUPERIOR EN INFORMÁTICA ANTEPROYECTO UN SISTEMA DE VIDEO VIGILANCIA PARA DETECCIÓN DE CAÍDAS DIRECTOR DEL PROYECTO: FIRMA:
Robótica y visión artificial. Miguel Cazorla http://www.dccia.ua.es/~miguel Grupo de Visión Robótica Universidad de Alicante
 Robótica y visión artificial Miguel Cazorla http://www.dccia.ua.es/~miguel Grupo de Visión Robótica Universidad de Alicante Introducción Percepción biológica vs. computacional Qué es una imagen? Procesamiento
Robótica y visión artificial Miguel Cazorla http://www.dccia.ua.es/~miguel Grupo de Visión Robótica Universidad de Alicante Introducción Percepción biológica vs. computacional Qué es una imagen? Procesamiento
Sistema de ecuaciones lineales
 1 El sistema de ecuaciones lineales Sistema de ecuaciones lineales puede ser escrito en forma matricial como, donde: es llamada matriz de los coeficientes (reales) del sistema es el vector de las incógnitas
1 El sistema de ecuaciones lineales Sistema de ecuaciones lineales puede ser escrito en forma matricial como, donde: es llamada matriz de los coeficientes (reales) del sistema es el vector de las incógnitas
Obtención de modelos tridimensionales para ingeniería por medio de barredores lídar y de aeronaves no tripuladas
 Obtención de modelos tridimensionales para ingeniería por medio de barredores lídar y de aeronaves no tripuladas Armando Peralta Higuera Laboratorio de Análisis Geoespacial Instituto de Geografía, UNAM
Obtención de modelos tridimensionales para ingeniería por medio de barredores lídar y de aeronaves no tripuladas Armando Peralta Higuera Laboratorio de Análisis Geoespacial Instituto de Geografía, UNAM
Análisis del artículo
 Análisis del artículo Mean Shift: A Robust Approach toward Feature Space Analysis Dorin Comaniciu - Peter Meer R. Omar Chávez Garcia - Pável Herrera Domínguez 25 de mayo de 2009 Conceptos básicos Dorin
Análisis del artículo Mean Shift: A Robust Approach toward Feature Space Analysis Dorin Comaniciu - Peter Meer R. Omar Chávez Garcia - Pável Herrera Domínguez 25 de mayo de 2009 Conceptos básicos Dorin
PRÓLOGO PREFACIO... 21
 ÍNDICE PRÓLOGO... 17 PREFACIO... 21 CAPÍTULO 1. ENTORNO ACTUAL Y PERSPECTIVAS... 27 1.1 ORGANIZACIÓN DE UN SISTEMA ROBÓTICO... 29 1.2 ENTORNOS MATLAB Y SIMULINK... 31 1.3 TENDENCIAS EN ROBÓTICA Y MECATRÓNICA...
ÍNDICE PRÓLOGO... 17 PREFACIO... 21 CAPÍTULO 1. ENTORNO ACTUAL Y PERSPECTIVAS... 27 1.1 ORGANIZACIÓN DE UN SISTEMA ROBÓTICO... 29 1.2 ENTORNOS MATLAB Y SIMULINK... 31 1.3 TENDENCIAS EN ROBÓTICA Y MECATRÓNICA...
4 Localización de terremotos
 513430 - Sismología Apl. y de Explor. 31 4 Localización de terremotos 4.1 Localización de sismos locales Fig 30: Gráfico de la ruptura en la superficie de una falla. La ruptura se propaga desde el punto
513430 - Sismología Apl. y de Explor. 31 4 Localización de terremotos 4.1 Localización de sismos locales Fig 30: Gráfico de la ruptura en la superficie de una falla. La ruptura se propaga desde el punto
Sistema de Realidad Aumentada en Entornos Reales Adversos
 Proyecto Fin de Carrera Ingeniería Industrial Sistema de Realidad Aumentada en Entornos Reales Adversos Autor Miguel Ángel Montañés Laborda Director Mario F. Rodríguez Martínez Ponente José Elías Herrero
Proyecto Fin de Carrera Ingeniería Industrial Sistema de Realidad Aumentada en Entornos Reales Adversos Autor Miguel Ángel Montañés Laborda Director Mario F. Rodríguez Martínez Ponente José Elías Herrero
Mapeo. CI-2657 Robótica M.Sc. Kryscia Ramírez Benavides
 M.Sc. Kryscia Ramírez Benavides Problemas de Navegación de los Robots Dónde estoy? Localización. Dónde he estado? Mapa de decisiones. A dónde voy? Planificación de misiones. Cuál es la mejor manera de
M.Sc. Kryscia Ramírez Benavides Problemas de Navegación de los Robots Dónde estoy? Localización. Dónde he estado? Mapa de decisiones. A dónde voy? Planificación de misiones. Cuál es la mejor manera de
4.3. Evaluación Se ha escogido un problema de seguimiento de un sólo objeto para evitar el proceso de asociación de datos y facilitar la visual
 4.3. Evaluación. 57 4.3 Evaluación. Uno de los problemas que nos encontramos al definir un método de seguimiento visual es el de como evaluar su funcionamiento. Este hecho es debido a que la medida de
4.3. Evaluación. 57 4.3 Evaluación. Uno de los problemas que nos encontramos al definir un método de seguimiento visual es el de como evaluar su funcionamiento. Este hecho es debido a que la medida de
Reconocimiento automático de palabras en documentos históricos usando redes neuronales convolucionales
 Reconocimiento automático de palabras en documentos históricos usando redes neuronales convolucionales Dra. Ma. de Guadalupe García Hernández Departamento de Ingeniería Electrónica Objetivo general Aplicar
Reconocimiento automático de palabras en documentos históricos usando redes neuronales convolucionales Dra. Ma. de Guadalupe García Hernández Departamento de Ingeniería Electrónica Objetivo general Aplicar
6 Analizador de escena
 Reconocimiento de señales de tráfico para un sistema de ayuda a la conducción 6 Analizador de escena 6.1 Objetivo y funcionamiento Hasta ahora se ha explicado el proceso de extracción de información de
Reconocimiento de señales de tráfico para un sistema de ayuda a la conducción 6 Analizador de escena 6.1 Objetivo y funcionamiento Hasta ahora se ha explicado el proceso de extracción de información de
ROBOTICA por OLLERO BATURONE Editorial Marcombo. Foreword Prólogo Prefacio del autor
 ROBOTICA por OLLERO BATURONE Editorial Marcombo Foreword Prólogo Prefacio del autor CAPÍTULO 1. Introducción 1.1. Robótica 1.2. Esquema general del sistema robot 1.3. Robots manipuladores 1.3.1. Sistema
ROBOTICA por OLLERO BATURONE Editorial Marcombo Foreword Prólogo Prefacio del autor CAPÍTULO 1. Introducción 1.1. Robótica 1.2. Esquema general del sistema robot 1.3. Robots manipuladores 1.3.1. Sistema
TESIS MASTER EN INGENIERÍA UNIVERSIDAD DEL VALLE PROGRAMA DE POSGRADO EN INGENIERÍA ELÉCTRICA Y ELECTRÓNICA FACULTAD DE INGENIERÍA
 UNIVERSIDAD DEL VALLE PROGRAMA DE POSGRADO EN INGENIERÍA ELÉCTRICA Y ELECTRÓNICA FACULTAD DE INGENIERÍA MAPEO Y LOCALIZACIÓN SIMULTÁNEA DE UN ROBOT MÓVIL EN AMBIENTES ESTRUCTURADOS BASADO EN INTEGRACIÓN
UNIVERSIDAD DEL VALLE PROGRAMA DE POSGRADO EN INGENIERÍA ELÉCTRICA Y ELECTRÓNICA FACULTAD DE INGENIERÍA MAPEO Y LOCALIZACIÓN SIMULTÁNEA DE UN ROBOT MÓVIL EN AMBIENTES ESTRUCTURADOS BASADO EN INTEGRACIÓN
[20380] Visió per Computador Prueba 1 (2017) [A] Teoría (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada)
![[20380] Visió per Computador Prueba 1 (2017) [A] Teoría (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada)](/thumbs/89/97860031.jpg "[20380] Visió per Computador Prueba 1 (2017) [A] Teoría (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada)") 102784 [20380] Visió per Computador Prueba 1 (2017) [A] Teoría (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada) 1. Qué secuencia está ordenada de mayor a menor frecuencia: a) Rayos
102784 [20380] Visió per Computador Prueba 1 (2017) [A] Teoría (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada) 1. Qué secuencia está ordenada de mayor a menor frecuencia: a) Rayos
Seguimiento i de objetos
 IV Seminario de Inteligencia Artificial y Robótica Seguimiento i de objetos con Filtros de Partículas Franco Grassano sanno89@gmail.com Maximiliano Marufo Da Silva Alejandro Gastón Alvarez Ignacio Bertacchini
IV Seminario de Inteligencia Artificial y Robótica Seguimiento i de objetos con Filtros de Partículas Franco Grassano sanno89@gmail.com Maximiliano Marufo Da Silva Alejandro Gastón Alvarez Ignacio Bertacchini
Sistemas de guiado para colaboración en navegación de vehículos autónomos ( AGV )
") Sistemas de guiado para colaboración en navegación de vehículos autónomos ( AGV ) Mario R. Modesti Dr en Ciencias de la Ingeniería, Universidad Tecnológica Nacional CIII (Centro de Investigaciones en Informática
Sistemas de guiado para colaboración en navegación de vehículos autónomos ( AGV ) Mario R. Modesti Dr en Ciencias de la Ingeniería, Universidad Tecnológica Nacional CIII (Centro de Investigaciones en Informática
IMPLEMENTACION DE ODOMETRÍA VISUAL UTILIZANDO UNA CAMARA ESTEREOSCÓPICA MEMORIA PARA OPTAR AL TÍTULO DE INGENIERO CIVIL ELÉCTRICO
 UNIVERSIDAD DE CHILE FACULTAD DE CIENCIAS FÍSICAS Y MATEMÁTICAS DEPARTAMENTO DE INGENIERÍA ELÉCTRICA IMPLEMENTACION DE ODOMETRÍA VISUAL UTILIZANDO UNA CAMARA ESTEREOSCÓPICA MEMORIA PARA OPTAR AL TÍTULO
UNIVERSIDAD DE CHILE FACULTAD DE CIENCIAS FÍSICAS Y MATEMÁTICAS DEPARTAMENTO DE INGENIERÍA ELÉCTRICA IMPLEMENTACION DE ODOMETRÍA VISUAL UTILIZANDO UNA CAMARA ESTEREOSCÓPICA MEMORIA PARA OPTAR AL TÍTULO