CONTROL ELECTRÓNICO DE MOTORES CA. Tema 4
|
|
|
- Claudia Córdoba Lara
- hace 8 años
- Vistas:
Transcripción
1 CONTROL ELECTRÓNICO DE MOTORES CA Tema 4
2 2

3 INDICE 3.1 MOTORES DE CORRIENTE ALTERNA REGULACIÓN DE LA VELOCIDAD... 4 CONTROL DE LA TENSIÓN Y FRECUENCIA DE LÍNEA CONTROL VECTORIAL VARIADORES DE VELOCIDAD LOS VARIADORES MECÁNICOS LOS VARIADORES ELECTRÓNICOS EJEMPLOS DE CÁLCULO

4 3.1 MOTORES DE CORRIENTE ALTERNA. Introducción de su funcionamiento, parámetros y curvas características. Punto desarrollado en las transparencias. 3.2 REGULACIÓN DE LA VELOCIDAD. Aunque son de sobra conocidas las ventajas del motor de inducción en cuanto a robustez, sencillez, coste y mantenimiento, su uso generalizado en aplicaciones de regulación de velocidad no ha llegado hasta esta última década. Ello ha sido gracias al: 1) Desarrollo de dispositivos electrónicos de potencia (IGBT) de fácil control, alta frecuencia de conmutación y capacidad media de potencia. 2) Desarrollo de sistemas de control digital (DSP) con gran potencia computacional y recursos propios de microcontroladores de gama alta (convertidores A/D, E/S digitales, temporizadores, watchdog, unidades de captura y comparación) que permiten la implementación en tiempo real de complejos algoritmos de control. 3) Disminución de coste de los dispositivos 1) y de los sistemas 2). Para comprender los principios básicos de la regulación de la velocidad de los motores asíncronos, se recuerda que la velocidad de giro de estas máquinas en r.p.m. viene expresada por: 60 f1 n = n1 (1 s) = (1 s) p Por lo tanto, de acuerdo con la expresión anterior existen tres procedimientos para cambiar la velocidad n a saber: a) Variar el número de polos de la máquina b) Cambiar la frecuencia de alimentación f 1. c) Modificar el deslizamiento s. Los procedimientos prácticos para variar la velocidad de un motor asíncrono se basan fundamentalmente en el control de la frecuencia y del deslizamiento, y 4
 Desarrollo de sistemas de control digital (DSP) con gran potencia computacional y recursos propios de microcontroladores de gama alta (convertidores A/D, E/S digitales, temporizadores, watchdog,")
5 este a su vez se puede controlar indirectamente ajustando la tensión de alimentación aplicada a la máquina. CONTROL DE LA TENSIÓN Y FRECUENCIA DE LÍNEA. De acuerdo con la ecuación anterior y conforme a lo dicho, un método para variar la velocidad de giro de un motor asíncrono es, cambiar la frecuencia de alimentación f que llega al estator, pues ésta modifica la velocidad de sincronismo del campo magnético giratorio y por ende la velocidad mecánica de giro que es cercana a aquélla en virtud del pequeño valor del deslizamiento en este tipo de máquinas. Sin embargo hay que tener en cuenta que el flujo magnético en el entrehierro es directamente proporcional a la f.e.m. inducida en cada devanado del estator e inversamente a la frecuencia. E 1 = 4,44 k1 f1 N1 φ m por consiguiente una reducción en la frecuencia de alimentación f 1 produce un aumento del flujo magnético φ m. Para evitar la saturación del núcleo magnético debido al aumento del flujo, deberá aumentarse proporcionalmente la f.e.m. E 1. Sin embargo la forma más sencilla de regular esta f.e.m. es controlando la tensión de alimentación V 1, tal y como podemos comprobar en el circuito equivalente de la máquina asíncrona y la ecuación del flujo que lo define. de este modo al variar la frecuencia de alimentación f 1 siempre que se cambie al mismo tiempo la tensión aplicada V 1 se conseguirá una buena regulación de la velocidad del motor. 5

6 La realización práctica de este sistema de control requiere el uso de dos convertidores electrónicos: un rectificador controlado y un inversor. El rectificador controlado transformará la tensión trifásica de la red en una etapa intermedia de c.c., de tal modo que se puede regular la tensión que llega al inversor modificando el ángulo de encendido de los tiristores del rectificador controlado. El inversor produce una tensión trifásica cuya frecuencia depende de la secuencia de impulsos que se aplican a las puertas de sus tiristores, de este modo al motor asíncrono llega una tensión variable en frecuencia y tensión. Las características par-velocidad de este sistema de regulación se muestran en la siguiente figura. Se considera que a la frecuencia nominal o frecuencia base, la tensión aplicada al motor es la tensión nominal. Por debajo de esta frecuencia, el flujo se mantiene constante, variando la frecuencia pero haciendo que sea constante el cociente tensión/frecuencia con lo que se consigue que el par máximo sea el mismo para todas las curvas par-velocidad que resultan para las frecuencias inferiores a la nominal o base. Por encima de la frecuencia nominal, no se puede realizar el mismo tipo de control de conservar inalterable la relación V /f, ya que obligaría a aumentar la tensión por encima de su valor nominal, y es por ello que la tensión se fija en el valor nominal y se aumenta la frecuencia paulatinamente en esta zona, esto provoca una disminución del flujo magnético en el entrehierro, lo que se traduce en una reducción del valor par máximo, en todo el rango de variación superior, como puede observarse en la parte derecha de la siguiente figura. Esta acción corresponde al control por reducción de campo, por lo que es posible funcionar en esta zona en un régimen de potencia constante, tal y como se señala con las curvas de trazado discontinuo que se observan en la siguiente figura. 6

7 Se observan también en esta figura las diferentes velocidades de funcionamiento cuando el motor mueve una carga con par cuadrático. Cuando se requiere un control muy preciso de la velocidad de un accionamiento movido por un motor asíncrono, el circuito anterior no es capaz de cumplir tal objetivo y debe completarse con algún lazo de realimentación que incorpore una medida de la velocidad del motor. 7

8 En este esquema se fija la velocidad de consigna desde el exterior por medio de la tensión de referencia n*; el tacogenerador acoplado al eje del motor produce una f.e.m proporcional a la velocidad real de la máquina n. En la parte inferior izquierda hay un nudo sumador en el que se restan ambas tensiones (velocidades), dando lugar a la tensión de error de velocidad n* - n, que se procesa a través de un controlador proporcional integral PI para reducir el error a cero y mejorar la dinámica del lazo de control; la parte proporcional de este controlador incluye un factor p/60, siendo p el número de pares de polos del motor, para convertir la diferencia de velocidades medida en r.p.m. en una frecuencia equivalente del circuito del rotor f* 2. A continuación existe un regulador de la frecuencia anterior, que es simplemente un limitador, que fija el valor de la frecuencia de consigna del rotor f* 2 para que no sea superior a la que corresponde a la condición de par máximo, limitando de este modo la corriente del inversor a un valor permisible. A continuación existe otro sumador que suma la frecuencia f* 2 con la frecuencia eléctrica de giro del rotor np/60, generando de este modo la frecuencia de consigna en el valor f* 1 = f* 2 + np/60, que debe producir el inversor que alimenta el motor. Por otro lado, esta señal f* 1 se lleva a un generador de funciones para producir la señal de referencia de tensión V 1 * que debe aplicarse a la máquina y que regula los impulsos de disparo del rectificador controlado, haciendo que la máquina funcione con el cociente V 1 */ f* 1 constante. Si la frecuencia f* 1 que llega al generador de funciones es inferior a la frecuencia (velocidad) base, este generador suministra una tensión proporcional de la forma V 1 *=k f* 1 + V 0, donde V 0 representa la tensión necesaria que debe aplicarse al estator, para que el motor trabaje con flujo nominal a velocidad cero, y donde k se elige de tal modo que la máquina trabaje a la tensión nominal o asignada cuando el valor de la frecuencia es la nominal. Cuando f* 1 es superior a la frecuencia base f b se produce una saturación del bloque generador de funciones, lo que limita el valor de V 1 * a su valor máximo, que es igual a la tensión nominal. De este modo, por debajo de la frecuencia base se tiene una regulación simultánea de V 1 * y f* 1, la primera de las cuales se utiliza para cambiar la salida del rectificador controlado y la segunda para modificar la frecuencia del inversor, manteniendo en cada momento el cociente V 1 */ f* 1 constante. Por encima de la frecuencia base, el valor de V 1 * es constante y la regulación de velocidad se hace a través de la frecuencia de salida del inversor y que va fijando la frecuencia f* 1. Si se considera que la máquina está girando en una situación determinada a velocidad n y se aumenta la velocidad de consigna n*, se produce un error de velocidad positivo que satura el regulador de la frecuencia del rotor f 2, dando lugar a una salida máxima de f* 2 ; de este modo el motor se acelera aumentando la corriente de la máquina hasta el valor máximo permitido por el inversor, lo que da lugar al máximo par de aceleración posible hasta que se consigue reducir el error de velocidad cero. El accionamiento que mueve el motor alcanza el régimen permanente para un valor de f* 2 para el cual se cumple el balance de pares motor y resistente. El proceso inverso tiene lugar si se reduce la velocidad de consigna n*. 8

9 Otro sistema de regulación que se utiliza para el control de los motores asíncronos es el uso de cicloconvertidores. En la siguiente figura se muestra de una forma simplificada el esquema correspondiente, en este caso este sistema electrónico produce una tensión trifásica variable en amplitud y frecuencia directamente, sin que se requiera una etapa de c.c. intermedia. El inconveniente de los cicloconvertidores es que el rango de variación de la frecuencia producida varía solamente entre 0 y 1/3 de la frecuencia de alimentación. Este sistema de regulación se emplea principalmente en motores de gran potencia, debido a la complejidad del equipo de control de disparo de los tiristores. Como conclusión podemos decir que el control para la regulación de velocidad en el motor de inducción es complejo si se desea aprovechar al máximo 9

10 las prestaciones del motor en cualquier punto de trabajo; la variación de la frecuencia de la tensión de alimentación permite regular la velocidad del motor, pero también provoca una variación indeseada del flujo y del par en el motor, debido al fuerte acoplamiento de las variables. CONTROL VECTORIAL. 10

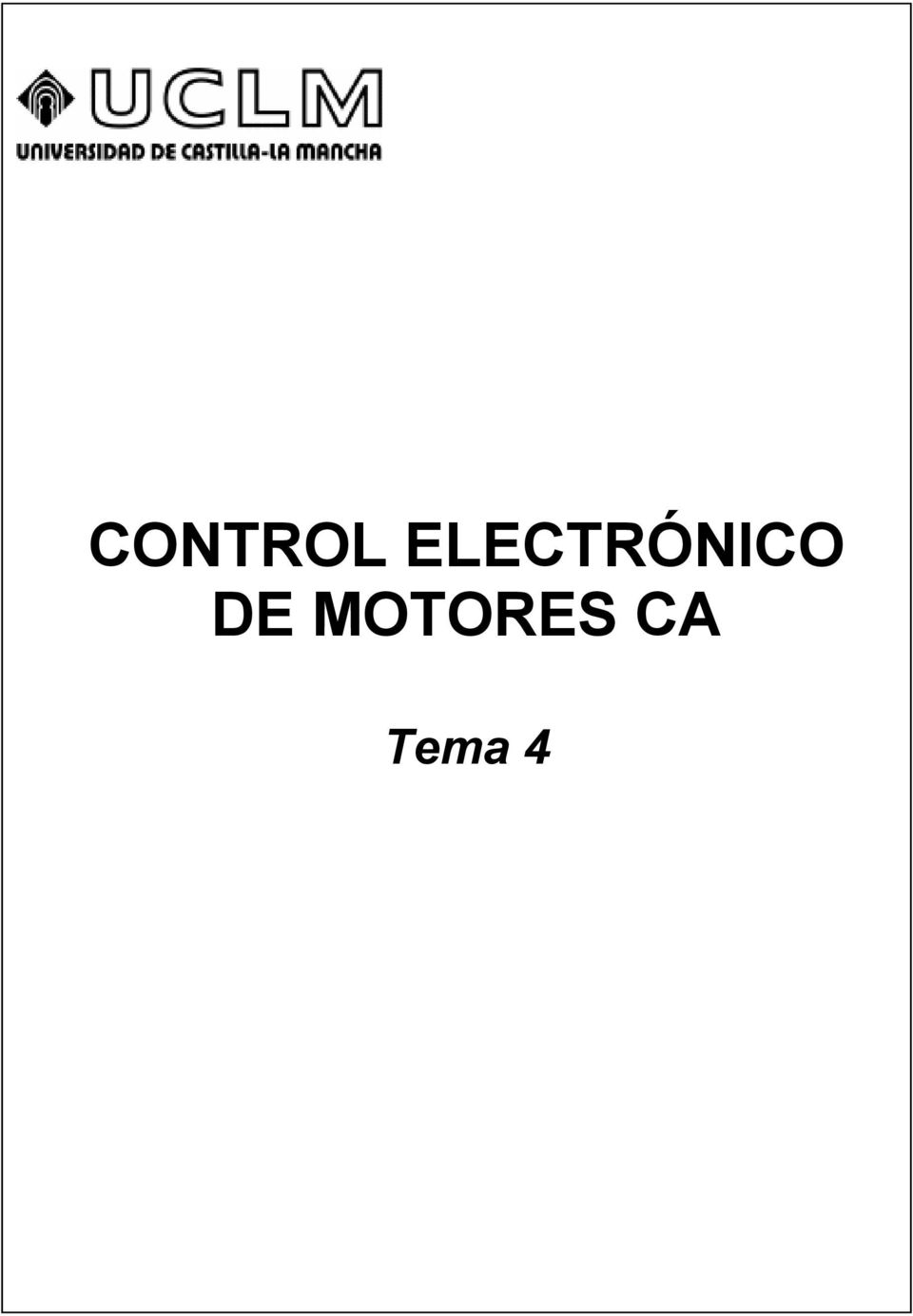
11 11
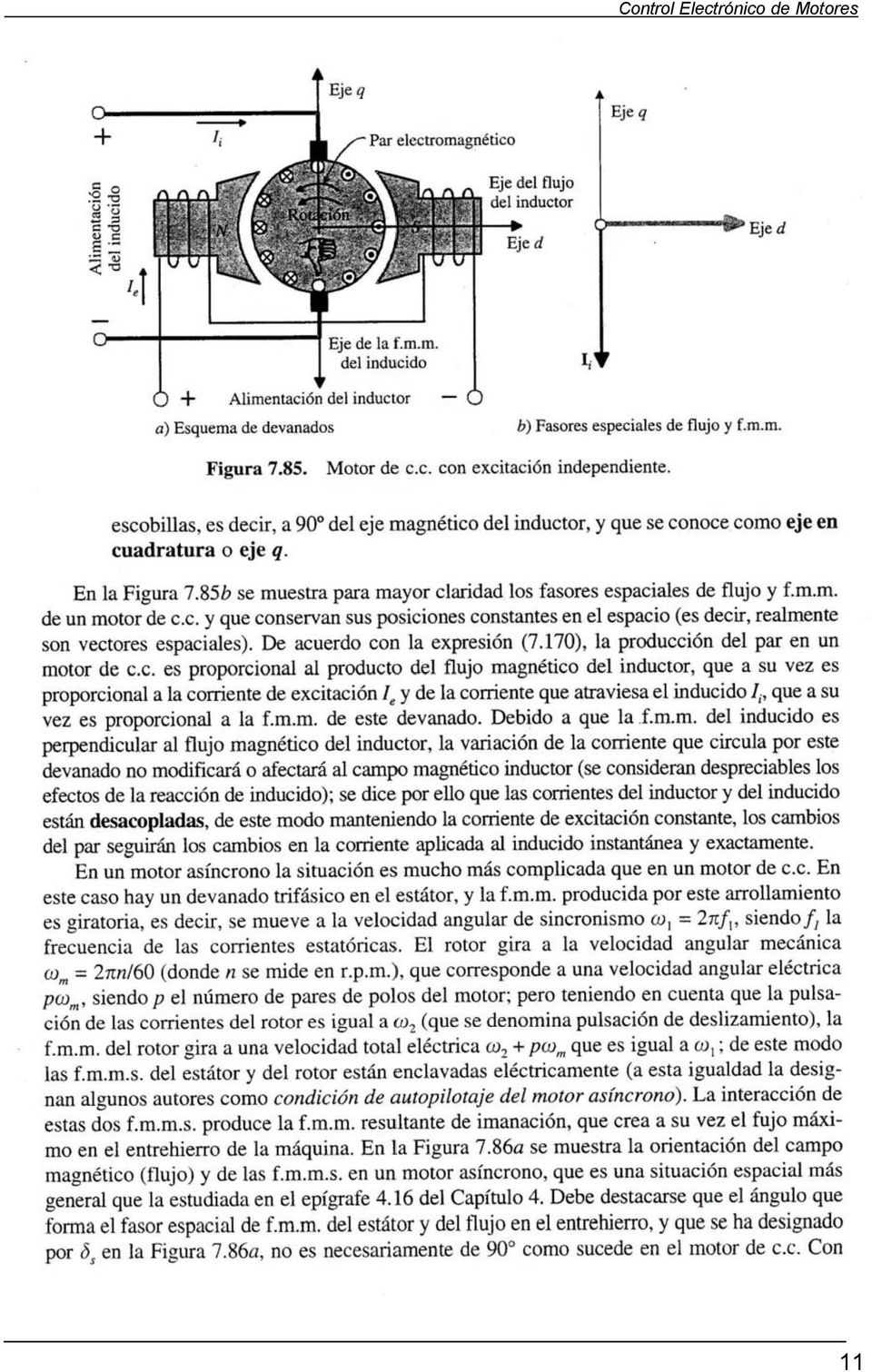
12 12
13 13
14 14
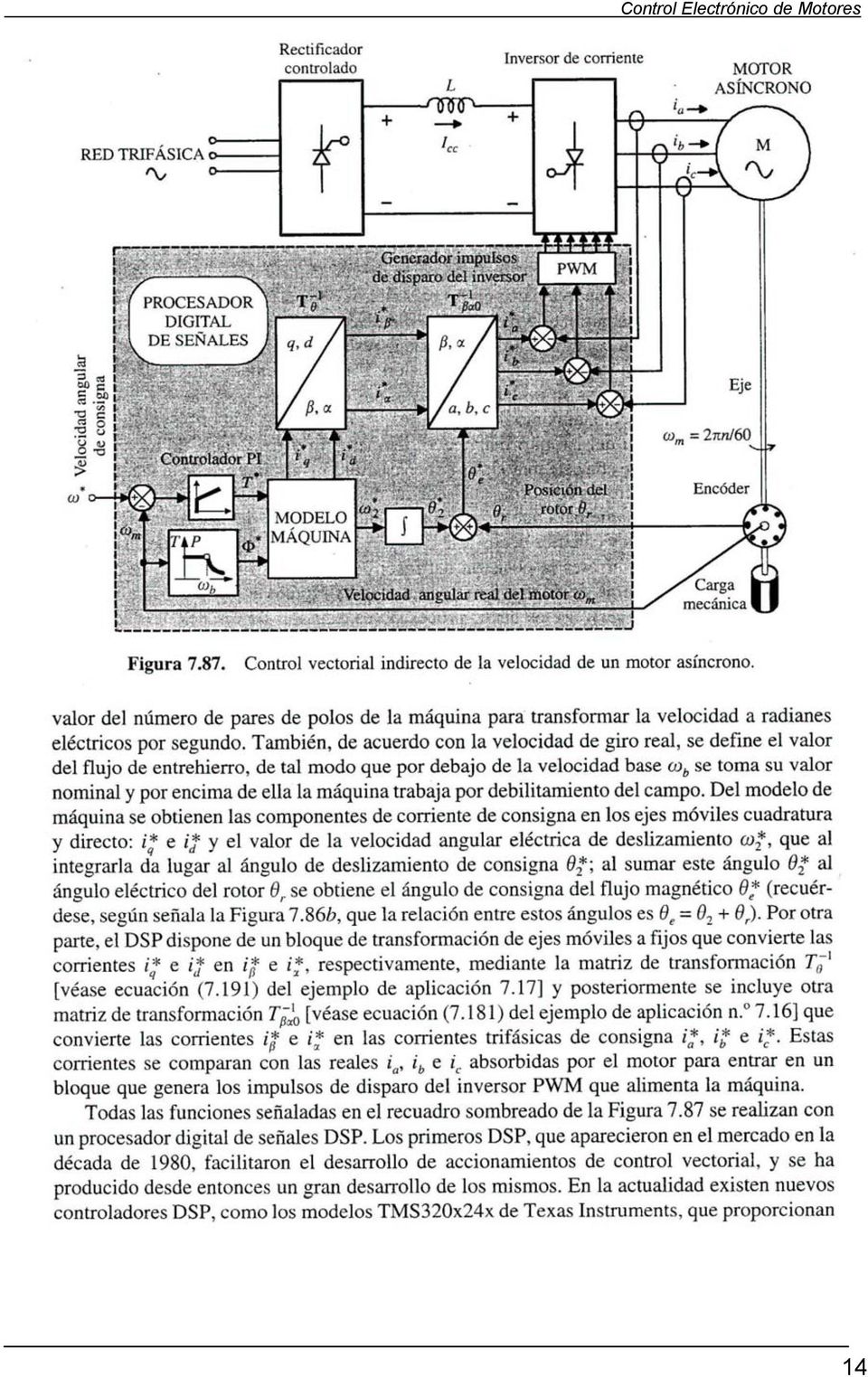
15 15
16 3.3. VARIADORES DE VELOCIDAD.. Existen dos posibilidades de regular la velocidad, una con los variadores mecánicos y otra con los electrónicos. LOS VARIADORES MECÁNICOS Son los que aparecieron en primer lugar para poder controlar o regular la velocidad de los coches teledirigidos, sin ellos sólo habría dos posibilidades: o velocidad máxima, o coche parado. Esto se da todavía en algunos coches a escala de juguete, que montan un pequeño motor, unas baterías y un interruptor. Para regular la velocidad se ideó un sistema que consiste en interponer entre la batería y el motor una resistencia variable. Es decir al empezar a acelerar la resistencia (R) que se interpone entre la batería y el motor es la máxima posible, por lo que al ser la I=V/R y considerar la tensión constante (V), la intensidad (I) de la corriente, es decir la cantidad de electricidad que llega al motor, es mínima. A medida que la resistencia se va haciendo menor, mayor intensidad llegará al motor y el vehículo irá más rápido. La velocidad máxima se conseguirá cuando ninguna resistencia se interponga entre las baterías y el motor. Los variadores mecánicos tienen inconvenientes respecto a los variadores electrónicos, como son: Pérdida de energía: Excepto cuando se va a la máxima velocidad, parte de la energía de las baterías se pierde en las resistencias en forma de calor. Es decir siempre gastaremos prácticamente los mismos electrones, vayamos a la mínima o a la máxima velocidad. Poco progresivos: incluso el mejor modelo no se puede comparar al variador electrónico más básico. Lentos en la respuesta, ya que dependen de un servo mecánico. Limitados a motores no muy potentes: ya que la altas intensidades acaben por quemar literalmente el variador. Poca seguridad, ya que cuando se agotan las baterías se detiene el servo de aceleración y el variador puede quedar en una posición diferente a la neutra, quedando la máquina fuera de control. Requieren un mantenimiento continuo. Poco duraderos: el sistema de contactos no es perfecto y el paso de grandes intensidades de corriente hace que se deterioren llegando un 16

17 momento en que la reparación no sea posible y haya que proceder a comprar uno nuevo. Peso y espacio: en los variadores mecánicos hay que incluir además de su peso, el del servo de dirección, resistencias cerámicas etc, por lo que son más pesados que los electrónicos. Además requieren más espacio libre para su instalación. Pero no todo son inconvenientes, ya que tienen una ventaja fundamental: su precio, hasta 10 veces inferior a los electrónicos. LOS VARIADORES ELECTRÓNICOS Tienen la gran ventaja de solucionar la gran mayoría de los problemas de los variadores mecánicos, pero lógicamente su precio es mucho más elevado. Hicieron su aparición a principios de los años 80, con el fin de solucionar los inconvenientes de los variadores mecánicos. Los primeros en aparecer eran grandes, pesados y muy caros, y debido a los transistores bipolares que empleaban, las resistencias eran elevadas, calentándose de manera importante, por lo que tampoco eran utilizables con motores excesivamente potentes. Más tarde, a mediados de los 80, aparecieron los transistores MOS-FET (Metal Oxide Silicone - Field Effect Transistor) es decir transistores con efecto de campo de silicona-óxido metálico y se dio un paso significativo en la obtención de variadores eficientes, siendo la antesala de los avanzados variadores de que disponemos actualmente. Los variadores electrónicos están formados por varios bloques de circuitos electrónicos que presenten varias funciones dependiendo de la tarea final a realizar. Así, podemos destacar las siguientes funciones incluidas en la mayoría de variadores de velocidad que podemos encontrar en le mercado: Arranque y variación de velocidad. Inversión del sentido de marcha. Desaceleración, aceleración, parada. Protecciones del motor y variador. Comando dos hilos o tres hilos. Velocidades preseleccionadas. Memorización de la configuración en el variador. Inyección de corriente continua en la parada. Conmutación de rampa. retoma al vuelo, etc... Varias funciones pueden ser afectadas sobre una misma entrada lógica. 17

18 Podemos encontrar una amplia variedad de variadores de velocidad en le mercado, cada uno de los cuales será adecuado a un tipo de uso, dentro de las múltiples funciones que un solo variador puede realizar (a parte de variar la velocidad de la máquina, tal y como hemos indicado anteriormente pueden realizar otras funciones). Al final del tema hay algunos diagramas de bloque de variadores de velocidad y datos técnicos. 18
. Al final del tema hay algunos diagramas de bloque de variadores de velocidad y datos técnicos.")
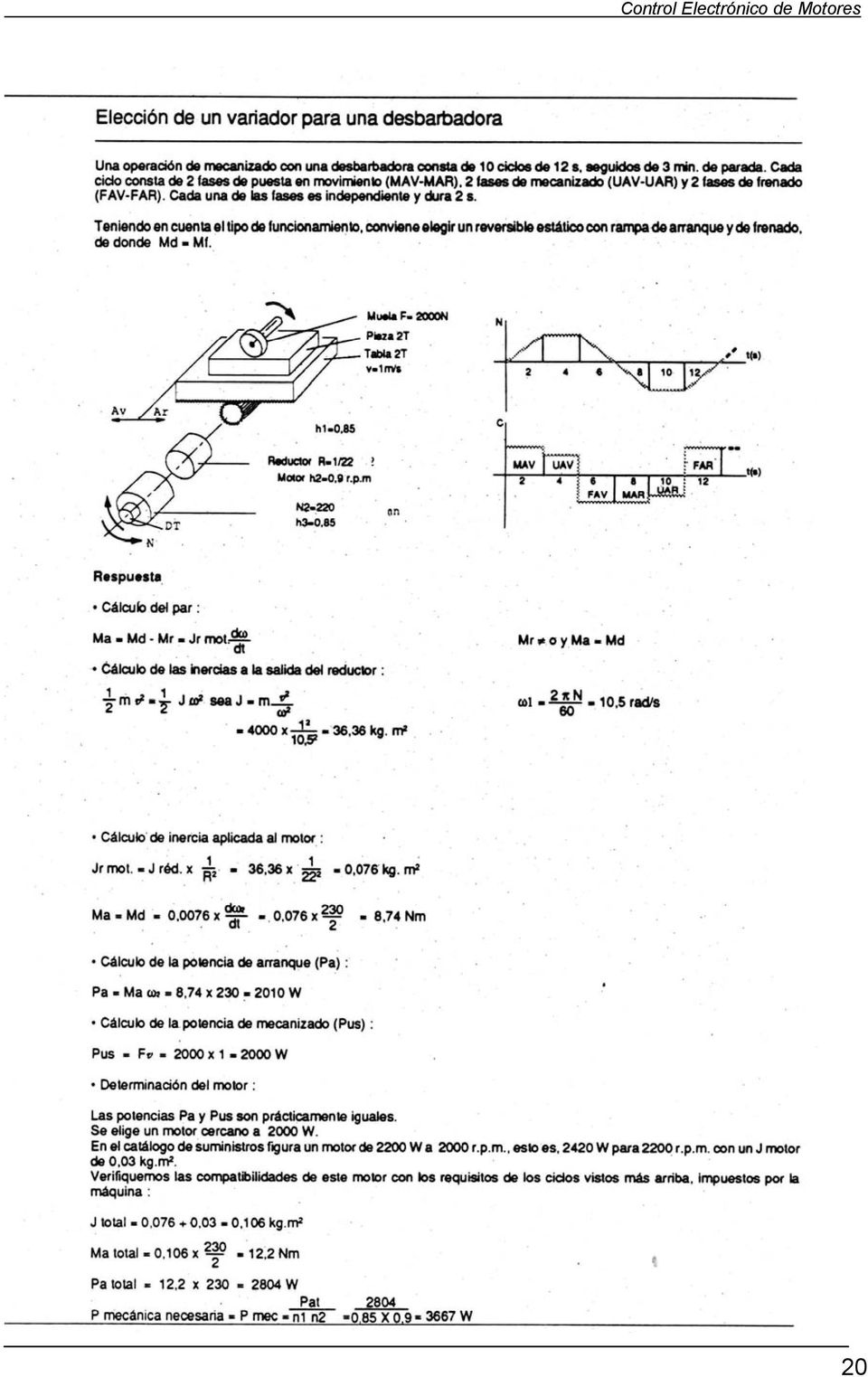
19 3.4. EJEMPLOS DE CÁLCULO. En este apartado se expone unos ejemplos de cálculo para seleccionar el motor a emplear en determinadas aplicaciones, son típicos de catálogos comerciales. 19

20 20
21 21
22 22
23 23
SISTEMA MONOFÁSICO Y TRIFÁSICO DE C.A Unidad 1 Magnetismo, electromagnetismo e Inducción electromagnética.
 SISTEMA MONOFÁSICO Y TRIFÁSICO DE C.A Unidad 1 Magnetismo, electromagnetismo e Inducción electromagnética. A diferencia de los sistemas monofásicos de C.A., estudiados hasta ahora, que utilizan dos conductores
SISTEMA MONOFÁSICO Y TRIFÁSICO DE C.A Unidad 1 Magnetismo, electromagnetismo e Inducción electromagnética. A diferencia de los sistemas monofásicos de C.A., estudiados hasta ahora, que utilizan dos conductores
La importancia de dimensionar correctamente los sistemas de frenado en aerogeneradores residenciales.
 La importancia de dimensionar correctamente los sistemas de frenado en aerogeneradores residenciales. La instalación de aerogeneradores en entornos urbanos requiere la implementación de importantes medidas
La importancia de dimensionar correctamente los sistemas de frenado en aerogeneradores residenciales. La instalación de aerogeneradores en entornos urbanos requiere la implementación de importantes medidas
ELEL10. Fuerza contraelectromotriz (fcem)
") Los motores de corriente directa transforman la energía eléctrica en energía mecánica. Impulsan dispositivos tales como malacates, ventiladores, bombas, calandrias, prensas, preforadores y carros. Estos
Los motores de corriente directa transforman la energía eléctrica en energía mecánica. Impulsan dispositivos tales como malacates, ventiladores, bombas, calandrias, prensas, preforadores y carros. Estos
ARRANQUE DE MOTORES ASÍNCRONOS TRIFÁSICOS
 ARRANQUE DE MOTORES ASÍNCRONOS TRIFÁSICOS INTRODUCCIÓN Para una mejor comprensión del problema que se plantea, partamos en primer lugar del circuito equivalente por fase del motor asíncrono trifásico.
ARRANQUE DE MOTORES ASÍNCRONOS TRIFÁSICOS INTRODUCCIÓN Para una mejor comprensión del problema que se plantea, partamos en primer lugar del circuito equivalente por fase del motor asíncrono trifásico.
MÁQUINAS ELÉCTRICAS: MOTORES
 MÁQNAS ELÉCTRCAS: MOTORES Se denomina máquina eléctrica a todo dispositivo capaz de generar, transformar o aprovechar la energía eléctrica. Según esto podemos clasificar las máquinas eléctricas en tres
MÁQNAS ELÉCTRCAS: MOTORES Se denomina máquina eléctrica a todo dispositivo capaz de generar, transformar o aprovechar la energía eléctrica. Según esto podemos clasificar las máquinas eléctricas en tres
DEFINICIÓN Y PRINCIPIO DE OPERACIÓN
 DEFINICIÓN Y PRINCIPIO DE OPERACIÓN El motor eléctrico es un dispositivo que transforma la energía eléctrica en energía mecánica por medio de la acción de los campos magnéticos generados en sus bobinas.
DEFINICIÓN Y PRINCIPIO DE OPERACIÓN El motor eléctrico es un dispositivo que transforma la energía eléctrica en energía mecánica por medio de la acción de los campos magnéticos generados en sus bobinas.
VARIADORES DE FRECUENCIA
 VARIADORES DE FRECUENCIA REPASO DE CONCEPTOS ELECTROTÉCNICOS. Como paso previo a la lectura de estos apuntes, sería conveniente un repaso a los conceptos básicos de los motores asíncronos de jaula de ardilla,
VARIADORES DE FRECUENCIA REPASO DE CONCEPTOS ELECTROTÉCNICOS. Como paso previo a la lectura de estos apuntes, sería conveniente un repaso a los conceptos básicos de los motores asíncronos de jaula de ardilla,
Ensayos Básicos con las Máquinas Eléctricas Didácticas EXPERIMENTOS CON LAS MÁQUINAS ELÉCTRICAS
 Ensayos Básicos con las Máquinas Eléctricas Didácticas EXPERIMENTOS CON LAS MÁQUINAS ELÉCTRICAS Experimentos con Máquinas Eléctricas Didácticas 2 ÍNDICE 1 Introducción...3 2 Máquinas de Corriente Continua...4
Ensayos Básicos con las Máquinas Eléctricas Didácticas EXPERIMENTOS CON LAS MÁQUINAS ELÉCTRICAS Experimentos con Máquinas Eléctricas Didácticas 2 ÍNDICE 1 Introducción...3 2 Máquinas de Corriente Continua...4
Problemas resueltos. Consideramos despreciable la caída de tensión en las escobillas, por lo que podremos escribir:
 Problemas resueltos Problema 1. Un motor de c.c (excitado según el circuito del dibujo) tiene una tensión en bornes de 230 v., si la fuerza contraelectromotriz generada en el inducido es de 224 v. y absorbe
Problemas resueltos Problema 1. Un motor de c.c (excitado según el circuito del dibujo) tiene una tensión en bornes de 230 v., si la fuerza contraelectromotriz generada en el inducido es de 224 v. y absorbe
PRÁCTICAS VÍA INTERNET Célula de Clasificación
 PRÁCTICAS VÍA INTERNET Célula de Clasificación Operación Remota e Interfaz Web 1. Introducción Los variadores son convertidores de frecuencia encargados de modular la señal de alterna que recibe el motor.
PRÁCTICAS VÍA INTERNET Célula de Clasificación Operación Remota e Interfaz Web 1. Introducción Los variadores son convertidores de frecuencia encargados de modular la señal de alterna que recibe el motor.
Capítulo 1 GESTIÓN DE LA ALIMENTACIÓN
 Capítulo 1 GESTIÓN DE LA ALIMENTACIÓN 1 Introducción En un robot autónomo la gestión de la alimentación es fundamental, desde la generación de energía hasta su consumo, ya que el robot será más autónomo
Capítulo 1 GESTIÓN DE LA ALIMENTACIÓN 1 Introducción En un robot autónomo la gestión de la alimentación es fundamental, desde la generación de energía hasta su consumo, ya que el robot será más autónomo
UD. 4 MAQUINAS ELECTRICAS ELECTROTECNIA APLICADA A LA INGENIERIA MECÁNICA
 ELECTROTECNIA APLICADA A LA INGENIERIA MECÁNICA UD. 4 MAQUINAS ELECTRICAS Descripción: Principios de electromagnetismo y funcionamiento y aplicaciones de las diferentes máquinas eléctricas. 1 Tema 4.4.
ELECTROTECNIA APLICADA A LA INGENIERIA MECÁNICA UD. 4 MAQUINAS ELECTRICAS Descripción: Principios de electromagnetismo y funcionamiento y aplicaciones de las diferentes máquinas eléctricas. 1 Tema 4.4.
Motores de Corriente Continua...3 Motores Paso a Paso...7 Bibliografía...9
 Por Guillermo Martín Díaz Alumno de: 1º Ingeniería Informática Curso 2005/2006 ËQGLFH Motores de Corriente Continua...3 Motores Paso a Paso...7 Bibliografía...9 2 0RWRUHVGH&RUULHQWHFRQWLQXD Son los mas
Por Guillermo Martín Díaz Alumno de: 1º Ingeniería Informática Curso 2005/2006 ËQGLFH Motores de Corriente Continua...3 Motores Paso a Paso...7 Bibliografía...9 2 0RWRUHVGH&RUULHQWHFRQWLQXD Son los mas
Escuela 4-016 Ing. Marcelo Antonio Arboit - Junín
 Un transformador se compone de dos arrollamientos aislados eléctricamente entre sí y devanados sobre un mismo núcleo de hierro. Una corriente alterna que circule por uno de los arrollamientos crea en el
Un transformador se compone de dos arrollamientos aislados eléctricamente entre sí y devanados sobre un mismo núcleo de hierro. Una corriente alterna que circule por uno de los arrollamientos crea en el
MOTORES ASÍNCRONOS MONOFÁSICOS
 MOTORES ASÍNCRONOS MONOFÁSICOS INTRODUCCIÓN Los motores monofásicos, como su propio nombre indica son motores con un solo devanado en el estator, que es el devanado inductor. Prácticamente todas las realizaciones
MOTORES ASÍNCRONOS MONOFÁSICOS INTRODUCCIÓN Los motores monofásicos, como su propio nombre indica son motores con un solo devanado en el estator, que es el devanado inductor. Prácticamente todas las realizaciones
Tema 7. MOTORES ELÉCTRICOS DE CORRIENTE CONTINUA
 Tema 7. MOTORES ELÉCTRICOS DE CORRIENTE CONTINUA 1. MAGNETISMO Y ELECTRICIDAD...2 Fuerza electromotriz inducida (Ley de inducción de Faraday)...2 Fuerza electromagnética (2ª Ley de Laplace)...2 2. LAS
Tema 7. MOTORES ELÉCTRICOS DE CORRIENTE CONTINUA 1. MAGNETISMO Y ELECTRICIDAD...2 Fuerza electromotriz inducida (Ley de inducción de Faraday)...2 Fuerza electromagnética (2ª Ley de Laplace)...2 2. LAS
Medidas de la tensión de salida en variadores de velocidad con osciloscopios digitales ScopeMeter Serie 190 de Fluke
 Aplicación Medidas de la tensión de salida en variadores de velocidad con osciloscopios digitales ScopeMeter Serie 190 de Fluke Por Viditec La utilización de variadores de velocidad o "inversores de frecuencia"
Aplicación Medidas de la tensión de salida en variadores de velocidad con osciloscopios digitales ScopeMeter Serie 190 de Fluke Por Viditec La utilización de variadores de velocidad o "inversores de frecuencia"
HIPÓTESIS DE DISEÑO DEL MOTOR ASÍNCRONO CONVENCIONAL
 Introducción a los motores asíncronos vectoriales Qué tipo de motor instala usted con su variador de frecuencia? Si formulamos esta pregunta a la mayoría de ingenieros, la respuesta en muchos casos será
Introducción a los motores asíncronos vectoriales Qué tipo de motor instala usted con su variador de frecuencia? Si formulamos esta pregunta a la mayoría de ingenieros, la respuesta en muchos casos será
TEMA 9 Cicloconvertidores
 TEMA 9 Cicloconvertidores 9.1.- Introducción.... 1 9.2.- Principio de Funcionamiento... 1 9.3.- Montajes utilizados.... 4 9.4.- Estudio de la tensión de salida.... 6 9.5.- Modos de funcionamiento... 7
TEMA 9 Cicloconvertidores 9.1.- Introducción.... 1 9.2.- Principio de Funcionamiento... 1 9.3.- Montajes utilizados.... 4 9.4.- Estudio de la tensión de salida.... 6 9.5.- Modos de funcionamiento... 7
Máquinas Eléctricas. Sistema Eléctrico. Maquina Eléctrica. Sistema Mecánico. Flujo de energía como MOTOR. Flujo de energía como GENERADOR
 Máquinas Eléctricas Las máquinas eléctricas son convertidores electromecánicos capaces de transformar energía desde un sistema eléctrico a un sistema mecánico o viceversa Flujo de energía como MOTOR Sistema
Máquinas Eléctricas Las máquinas eléctricas son convertidores electromecánicos capaces de transformar energía desde un sistema eléctrico a un sistema mecánico o viceversa Flujo de energía como MOTOR Sistema
TEMA 6. Fundamentos de las máquinas rotativas de corriente alterna.
 TEMA 6. Fundamentos de las máquinas rotativas de corriente alterna. CONTENIDO: 6.1. El motor asíncrono trifásico, principio de funcionamiento. 6.2. Conjuntos constructivos. 6.3. Potencia, par y rendimiento.
TEMA 6. Fundamentos de las máquinas rotativas de corriente alterna. CONTENIDO: 6.1. El motor asíncrono trifásico, principio de funcionamiento. 6.2. Conjuntos constructivos. 6.3. Potencia, par y rendimiento.
MÁQUINAS ELECTRICAS DE C.C y C.A.. ELECTROMECANICA UNIDAD 4 Generadores de Corriente Continua. Partes de una maquina eléctrica de corriente continua.
 Página19 UNIDAD 4 Generadores de Corriente Continua. Introducción En la actualidad, la generación de C.C. se realiza mediante pilas y acumuladores o se obtiene de la conversión de C.A. a C.C. mediante
Página19 UNIDAD 4 Generadores de Corriente Continua. Introducción En la actualidad, la generación de C.C. se realiza mediante pilas y acumuladores o se obtiene de la conversión de C.A. a C.C. mediante
MOTOR DE INDUCCION MONOFASICO
 MAQUINAS ELÉCTRICAS ROTATIVAS MOTOR DE INDUCCION MONOFASICO Mg. Amancio R. Rojas Flores 1. Principio de funcionamiento Básicamente, un motor de inducción monofásico está formado por un rotor en jaula de
MAQUINAS ELÉCTRICAS ROTATIVAS MOTOR DE INDUCCION MONOFASICO Mg. Amancio R. Rojas Flores 1. Principio de funcionamiento Básicamente, un motor de inducción monofásico está formado por un rotor en jaula de
Inversores De Frecuencia
 Inversores De Frecuencia QUÉ ES UN INVERSOR? Un inversor es un control para motores, que hace variar la velocidad a motores C.A. De inducción. Esta variación la logra variando la frecuencia de alimentación
Inversores De Frecuencia QUÉ ES UN INVERSOR? Un inversor es un control para motores, que hace variar la velocidad a motores C.A. De inducción. Esta variación la logra variando la frecuencia de alimentación
PROBLEMAS DE MAQUINAS ASINCRONICAS
 PROBLEMAS DE MAQUINAS ASINCRONICAS Problemas de MAQUINAS ASINCRONICAS Problema 1: Un motor de inducción trifásico que tiene las siguientes características de placa: P 1.5 HP; 1400 rpm; U N 220/380 V. Se
PROBLEMAS DE MAQUINAS ASINCRONICAS Problemas de MAQUINAS ASINCRONICAS Problema 1: Un motor de inducción trifásico que tiene las siguientes características de placa: P 1.5 HP; 1400 rpm; U N 220/380 V. Se
4. Tipos de servomotores. Clasificación según su topología:
 4. Tipos de servomotores. Clasificación según su topología: Motor Inducido de Tres fases AC Motor Tipo Brush DC Brushless Servo Motor (AC & DC) Motor Paso a Paso SwitchedReluctance Motors Motor Lineal
4. Tipos de servomotores. Clasificación según su topología: Motor Inducido de Tres fases AC Motor Tipo Brush DC Brushless Servo Motor (AC & DC) Motor Paso a Paso SwitchedReluctance Motors Motor Lineal
SERVOMOTORES. Los servos se utilizan frecuentemente en sistemas de radiocontrol, mecatrónicos y robótica, pero su uso no está limitado a estos.
 SERVOMOTORES Un servomotor (también llamado Servo) es un dispositivo similar a un motor DC, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación y mantenerse estable
SERVOMOTORES Un servomotor (también llamado Servo) es un dispositivo similar a un motor DC, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación y mantenerse estable
TRANSFORMADORES TRANSFORMADORES
 Sean dos bobinas N 1 y N 2 acopladas magnéticamente. Si la bobina N 1 se conecta a una tensión alterna sinusoidal v 1 se genera en la bobina N 2 una tensión alterna v 2. Las variaciones de flujo en la
Sean dos bobinas N 1 y N 2 acopladas magnéticamente. Si la bobina N 1 se conecta a una tensión alterna sinusoidal v 1 se genera en la bobina N 2 una tensión alterna v 2. Las variaciones de flujo en la
MODULO Nº6 TIRISTORES UNIDIRECCIONALES
 MODULO Nº6 TIRISTORES UNIDIRECCIONLES UNIDD: CONVERTIDORES C - CC TEMS: Tiristores. Rectificador Controlado de Silicio. Parámetros del SCR. Circuitos de Encendido y pagado del SCR. Controlador de Ángulo
MODULO Nº6 TIRISTORES UNIDIRECCIONLES UNIDD: CONVERTIDORES C - CC TEMS: Tiristores. Rectificador Controlado de Silicio. Parámetros del SCR. Circuitos de Encendido y pagado del SCR. Controlador de Ángulo
El motor eléctrico. Física. Liceo integrado de zipaquira MOTOR ELECTRICO
 El motor eléctrico Física Liceo integrado de zipaquira MOTOR ELECTRICO Motores y generadores eléctricos, grupo de aparatos que se utilizan para convertir la energía mecánica en eléctrica, o a la inversa,
El motor eléctrico Física Liceo integrado de zipaquira MOTOR ELECTRICO Motores y generadores eléctricos, grupo de aparatos que se utilizan para convertir la energía mecánica en eléctrica, o a la inversa,
Unidad didáctica: Electromagnetismo
 Unidad didáctica: Electromagnetismo CURSO 3º ESO 1 ÍNDICE Unidad didáctica: Electromagnetismo 1.- Introducción al electromagnetismo. 2.- Aplicaciones del electromagnetismo. 2.1.- Electroimán. 2.2.- Relé.
Unidad didáctica: Electromagnetismo CURSO 3º ESO 1 ÍNDICE Unidad didáctica: Electromagnetismo 1.- Introducción al electromagnetismo. 2.- Aplicaciones del electromagnetismo. 2.1.- Electroimán. 2.2.- Relé.
CAPITULO 1. Motores de Inducción.
 CAPITULO 1. Motores de Inducción. 1.1 Introducción. Los motores asíncronos o de inducción, son prácticamente motores trifásicos. Están basados en el accionamiento de una masa metálica por la acción de
CAPITULO 1. Motores de Inducción. 1.1 Introducción. Los motores asíncronos o de inducción, son prácticamente motores trifásicos. Están basados en el accionamiento de una masa metálica por la acción de
El control de motores para los microrrobots
 SEMINARIO DE DISEÑO Y CONSTRUCCIÓN DE MICRORROBOTS El control de motores para los microrrobots TRABAJO REALIZADO POR: Felipe Antonio Barreno Herrera. Estudiante de Ing. Téc. Industrial esp. Electrónica
SEMINARIO DE DISEÑO Y CONSTRUCCIÓN DE MICRORROBOTS El control de motores para los microrrobots TRABAJO REALIZADO POR: Felipe Antonio Barreno Herrera. Estudiante de Ing. Téc. Industrial esp. Electrónica
Máquinas eléctricas: Máquinas rotativas de corriente alterna
 Máquinas eléctricas: Máquinas rotativas de corriente alterna Ya has visto en temas anteriores el estudio de los motores de corriente continua y la clasificación de las máquinas, pues bien, ahora vas a
Máquinas eléctricas: Máquinas rotativas de corriente alterna Ya has visto en temas anteriores el estudio de los motores de corriente continua y la clasificación de las máquinas, pues bien, ahora vas a
Las unidades de la serie 470S son reguladores de tensión digitales trifásicos con las siguientes funciones:
 470S SERIES Las unidades de la serie 470S son reguladores de tensión digitales trifásicos con las siguientes funciones: APAGUE fase estática - Aplicación: comandos frecuentes de cargas trifásicas como
470S SERIES Las unidades de la serie 470S son reguladores de tensión digitales trifásicos con las siguientes funciones: APAGUE fase estática - Aplicación: comandos frecuentes de cargas trifásicas como
Conciencia Tecnológica ISSN: 1405-5597 contec@mail.ita.mx Instituto Tecnológico de Aguascalientes México
 Conciencia Tecnológica ISSN: 1405-5597 contec@mail.ita.mx Instituto Tecnológico de Aguascalientes México Domínguez Sánchez, Gabriel; Esparza González, Mario Salvador; Román Loera, Alejandro Comparación
Conciencia Tecnológica ISSN: 1405-5597 contec@mail.ita.mx Instituto Tecnológico de Aguascalientes México Domínguez Sánchez, Gabriel; Esparza González, Mario Salvador; Román Loera, Alejandro Comparación
INDICE Capitulo I. 1. Introducción a los Principios de las Máquinas Capitulo 2. Transformadores
 INDICE Prefacio XXI Capitulo I. 1. Introducción a los Principios de las Máquinas 1.1. Las máquinas eléctricas y los transformadores en la vida cotidiana 1 1.2. Nota sobre las unidades y notación Notación
INDICE Prefacio XXI Capitulo I. 1. Introducción a los Principios de las Máquinas 1.1. Las máquinas eléctricas y los transformadores en la vida cotidiana 1 1.2. Nota sobre las unidades y notación Notación
Máster Universitario en Profesorado
 Máster Universitario en Profesorado Complementos para la formación disciplinar en Tecnología y procesos industriales Aspectos básicos de la Tecnología Eléctrica Contenido (II) SEGUNDA PARTE: corriente
Máster Universitario en Profesorado Complementos para la formación disciplinar en Tecnología y procesos industriales Aspectos básicos de la Tecnología Eléctrica Contenido (II) SEGUNDA PARTE: corriente
CAPÍTULO COMPONENTES EL DIODO SEMICONDUCTORES: 1.1 INTRODUCCIÓN
 CAPÍTULO 1 COMPONENTES SEMICONDUCTORES: EL DIODO 1.1 INTRODUCCIÓN E n el capítulo 5 del tomo III se presentó una visión general de los componentes semiconductores básicos más frecuentes en electrónica,
CAPÍTULO 1 COMPONENTES SEMICONDUCTORES: EL DIODO 1.1 INTRODUCCIÓN E n el capítulo 5 del tomo III se presentó una visión general de los componentes semiconductores básicos más frecuentes en electrónica,
Circuito de Encendido. Encendido básico
 Circuito de Encendido Encendido básico Objetivos del Circuito de Encendido 1º Generar una chispa muy intensa entre los electrodos de las bujías para iniciar la combustión de la mezcla Objetivos del Circuito
Circuito de Encendido Encendido básico Objetivos del Circuito de Encendido 1º Generar una chispa muy intensa entre los electrodos de las bujías para iniciar la combustión de la mezcla Objetivos del Circuito
ESTUDIO DEL SISTEMA ESTÁTICO DE PROTECCIÓN DE UNA TURBINA A GAS
 ESTUDIO DEL SISTEMA ESTÁTICO DE PROTECCIÓN DE UNA TURBINA A GAS Patricio León Alvarado 1, Eduardo León Castro 2 1 Ingeniero Eléctrico en Potencia 2000 2 Director de Tesis. Postgrado en Ingeniería Eléctrica
ESTUDIO DEL SISTEMA ESTÁTICO DE PROTECCIÓN DE UNA TURBINA A GAS Patricio León Alvarado 1, Eduardo León Castro 2 1 Ingeniero Eléctrico en Potencia 2000 2 Director de Tesis. Postgrado en Ingeniería Eléctrica
ELEL10. Generadores de CC. Dinamos
 . Dinamos los generadores de corriente continua son maquinas que producen tensión su funcionamiento se reduce siempre al principio de la bobina giratorio dentro de un campo magnético. Si una armadura gira
. Dinamos los generadores de corriente continua son maquinas que producen tensión su funcionamiento se reduce siempre al principio de la bobina giratorio dentro de un campo magnético. Si una armadura gira
TRANSFORMADOR DE ALTA FRECUENCIA CON CONMUTACIÓN AUTOMÁTICA
 ÓPTIMO RENDIMIENTO Y FLEXIBILIDAD DE USO TRANSFORMADOR DE ALTA FRECUENCIA CON CONMUTACIÓN AUTOMÁTICA Una de las muchas exigencias de los inversores modernos son unos rangos de entrada y de tensión MPP
ÓPTIMO RENDIMIENTO Y FLEXIBILIDAD DE USO TRANSFORMADOR DE ALTA FRECUENCIA CON CONMUTACIÓN AUTOMÁTICA Una de las muchas exigencias de los inversores modernos son unos rangos de entrada y de tensión MPP
Corriente Alterna: actividades complementarias
 Corriente Alterna: actividades complementarias Transformador Dispositivo eléctrico que permite aumentar o disminuir la tensión en un circuito eléctrico de corriente alterna. Para el caso de un transformador
Corriente Alterna: actividades complementarias Transformador Dispositivo eléctrico que permite aumentar o disminuir la tensión en un circuito eléctrico de corriente alterna. Para el caso de un transformador
MODULO Nº12 TRANSISTORES MOSFET
 MODULO Nº12 TRANSISTORES MOSFET UNIDAD: CONVERTIDORES CC - CC TEMAS: Transistores MOSFET. Parámetros del Transistor MOSFET. Conmutación de Transistores MOSFET. OBJETIVOS: Comprender el funcionamiento del
MODULO Nº12 TRANSISTORES MOSFET UNIDAD: CONVERTIDORES CC - CC TEMAS: Transistores MOSFET. Parámetros del Transistor MOSFET. Conmutación de Transistores MOSFET. OBJETIVOS: Comprender el funcionamiento del
Qué es PRESS-SYSTEM?
 Qué es PRESS-SYSTEM? Es un sistema novedoso desarrollado e implementado por Efinétika que consigue mejoras sobre el rendimiento de los sistemas de bombeo de fluidos, aportando grandes ahorros energéticos
Qué es PRESS-SYSTEM? Es un sistema novedoso desarrollado e implementado por Efinétika que consigue mejoras sobre el rendimiento de los sistemas de bombeo de fluidos, aportando grandes ahorros energéticos
Artículo Técnico: Análisis de las configuraciones de los sistemas híbridos fotovoltaicos.
 GRUPO DE SISTEMAS ELECTRÓNICOS DE POTENCIA (GSEP) LABORATORIO DE SISTEMAS FOTOVOLTAICOS (UC3M PV-Lab) Generaciones Fotovoltaicas de La Mancha División Fotovoltaica Artículo Técnico: Análisis de las configuraciones
GRUPO DE SISTEMAS ELECTRÓNICOS DE POTENCIA (GSEP) LABORATORIO DE SISTEMAS FOTOVOLTAICOS (UC3M PV-Lab) Generaciones Fotovoltaicas de La Mancha División Fotovoltaica Artículo Técnico: Análisis de las configuraciones
Introducción ELECTROTECNIA
 Introducción Podríamos definir la Electrotecnia como la técnica de la electricidad ; desde esta perspectiva la Electrotecnia abarca un extenso campo que puede comprender desde la producción, transporte,
Introducción Podríamos definir la Electrotecnia como la técnica de la electricidad ; desde esta perspectiva la Electrotecnia abarca un extenso campo que puede comprender desde la producción, transporte,
Motores Síncronos. Florencio Jesús Cembranos Nistal. Revista Digital de ACTA 2014. Publicación patrocinada por
 Florencio Jesús Cembranos Nistal Revista Digital de ACTA 2014 Publicación patrocinada por 2014, Florencio Jesús Cembranos Nistal 2014, Cualquier forma de reproducción, distribución, comunicación pública
Florencio Jesús Cembranos Nistal Revista Digital de ACTA 2014 Publicación patrocinada por 2014, Florencio Jesús Cembranos Nistal 2014, Cualquier forma de reproducción, distribución, comunicación pública
Diseño electrónico de relés de protección para minicentrales hidroeléctricas
 Luminotecnia ENTREGA 1 Diseño electrónico de relés de protección para minicentrales hidroeléctricas Elaborado por: Ing. Avid Román González (IEEE) Sabiendo que en la región del Cusco (Perú) existen muchas
Luminotecnia ENTREGA 1 Diseño electrónico de relés de protección para minicentrales hidroeléctricas Elaborado por: Ing. Avid Román González (IEEE) Sabiendo que en la región del Cusco (Perú) existen muchas
3. 1 Generalidades y clasificación de los generadores. Según sea la energía absorbida, los generadores pueden ser:
 CAPITULO 3 GNRADORS LÉCTRICOS 3. 1 Generalidades y clasificación de los generadores. Se llama generador eléctrico todo aparato o máquina capaz de producir o generar energía eléctrica a expensas de otra
CAPITULO 3 GNRADORS LÉCTRICOS 3. 1 Generalidades y clasificación de los generadores. Se llama generador eléctrico todo aparato o máquina capaz de producir o generar energía eléctrica a expensas de otra
Electrón: partícula más pequeña de un átomo, que no se encuentra en el núcleo y que posee carga eléctrica negativa.
 Electricidad: flujo o corriente de electrones. Electrón: partícula más pequeña de un átomo, que no se encuentra en el núcleo y que posee carga eléctrica negativa. Elementos básicos de un circuito: generador,
Electricidad: flujo o corriente de electrones. Electrón: partícula más pequeña de un átomo, que no se encuentra en el núcleo y que posee carga eléctrica negativa. Elementos básicos de un circuito: generador,
ARRANQUE Y CONTROL DE LA VELOCIDAD DE MOTORES TRIFÁSICOS DE INDUCCIÓN Resumen
 ARRANQUE Y CONTROL DE LA VELOCIDAD DE MOTORES TRIFÁSICOS DE INDUCCIÓN Resumen Norberto A. Lemozy 1 INTRODUCCIÓN A continuación se presenta un resumen de los distintos métodos de arranque y de control de
ARRANQUE Y CONTROL DE LA VELOCIDAD DE MOTORES TRIFÁSICOS DE INDUCCIÓN Resumen Norberto A. Lemozy 1 INTRODUCCIÓN A continuación se presenta un resumen de los distintos métodos de arranque y de control de
Cálculo de las Acciones Motoras en Mecánica Analítica
 Cálculo de las Acciones Motoras en Mecánica Analítica 1. Planteamiento general El diseño típico de la motorización de un sistema mecánico S es el que se muestra en la figura 1. Su posición viene definida
Cálculo de las Acciones Motoras en Mecánica Analítica 1. Planteamiento general El diseño típico de la motorización de un sistema mecánico S es el que se muestra en la figura 1. Su posición viene definida
FUENTES DE ALIMENTACION
 FUENTES DE ALIMENTACION INTRODUCCIÓN Podemos definir fuente de alimentación como aparato electrónico modificador de la electricidad que convierte la tensión alterna en una tensión continua. Remontándonos
FUENTES DE ALIMENTACION INTRODUCCIÓN Podemos definir fuente de alimentación como aparato electrónico modificador de la electricidad que convierte la tensión alterna en una tensión continua. Remontándonos
SISTEMAS DE NUMERACIÓN. Sistema decimal
 SISTEMAS DE NUMERACIÓN Sistema decimal Desde antiguo el Hombre ha ideado sistemas para numerar objetos, algunos sistemas primitivos han llegado hasta nuestros días, tal es el caso de los "números romanos",
SISTEMAS DE NUMERACIÓN Sistema decimal Desde antiguo el Hombre ha ideado sistemas para numerar objetos, algunos sistemas primitivos han llegado hasta nuestros días, tal es el caso de los "números romanos",
ESTUDIO DE LA MÁQUINA ASÍNCRONA
 ESCUELA SUPERIOR DE INGENIEROS DE SAN SEBASTIÁN TECNUN UNIVERSIDAD DE NAVARRA Práctica nº : Sistemas Eléctricos ESTUDIO DE LA MÁQUINA ASÍNCRONA Sistemas Eléctricos 009-00.La Máquina de Inducción o Asíncrona
ESCUELA SUPERIOR DE INGENIEROS DE SAN SEBASTIÁN TECNUN UNIVERSIDAD DE NAVARRA Práctica nº : Sistemas Eléctricos ESTUDIO DE LA MÁQUINA ASÍNCRONA Sistemas Eléctricos 009-00.La Máquina de Inducción o Asíncrona
ALTERNADOR FUNCIONAMIENTO DEL UNIVERSIDAD DE GUALAJARA TEC: JUAN CARLOS SEDANO DE LA ROSA
 UNIVERSIDAD DE GUALAJARA CENTRO UNIVERSITARIO DE LA COSTA SUR DIVISIÓN DE DESARROLLO REGIONAL DEPARTAMENTO DE INGENIERÍAS FUNCIONAMIENTO DEL ALTERNADOR TEC: JUAN CARLOS SEDANO DE LA ROSA FUNCIONAMIENTO
UNIVERSIDAD DE GUALAJARA CENTRO UNIVERSITARIO DE LA COSTA SUR DIVISIÓN DE DESARROLLO REGIONAL DEPARTAMENTO DE INGENIERÍAS FUNCIONAMIENTO DEL ALTERNADOR TEC: JUAN CARLOS SEDANO DE LA ROSA FUNCIONAMIENTO
TEORIA UTIL PARA ELECTRICISTAS ALTERNADORES Y MOTORES CA
 Definición.- Es una maquina rotativa que genera corriente eléctrica alterna a partir de otra energía mecánica, como un molino de viento, una noria de agua, por vapor, etc. Diferencias con la dinamo.- En
Definición.- Es una maquina rotativa que genera corriente eléctrica alterna a partir de otra energía mecánica, como un molino de viento, una noria de agua, por vapor, etc. Diferencias con la dinamo.- En
Motores De Lavadora (Parte 1 de 2) Introducción a los modelos
 Introducción a los modelos") Motores De Lavadora (Parte 1 de 2) Introducción a los modelos Aviso importante: Apreciado lector este documento ha sido realizado por Manolo Romero en Madrid (España) el día 29 de septiembre de 2006).
Motores De Lavadora (Parte 1 de 2) Introducción a los modelos Aviso importante: Apreciado lector este documento ha sido realizado por Manolo Romero en Madrid (España) el día 29 de septiembre de 2006).
Control de motores de CC
 Control de motores de CC Control por modulación de ancho de Pulso (PWM) Prof: Bolaños D (versión 1-8-11) Aportes propios y de Internet Uno de los problemas más fundamentales de la robótica es el control
Control de motores de CC Control por modulación de ancho de Pulso (PWM) Prof: Bolaños D (versión 1-8-11) Aportes propios y de Internet Uno de los problemas más fundamentales de la robótica es el control
ORIENTACIONES DIDÁCTICAS PARA EL ALUMNADO
 ORIENTACIONES DIDÁCTICAS PARA EL ALUMNADO "Contenido adscrito a la Licéncia "Creative Commons" CC ES en las opciones "Reconocimiento -No Comercial- Compartir Igual". Autor: Ángel Mahiques Benavent ÍNDICE
ORIENTACIONES DIDÁCTICAS PARA EL ALUMNADO "Contenido adscrito a la Licéncia "Creative Commons" CC ES en las opciones "Reconocimiento -No Comercial- Compartir Igual". Autor: Ángel Mahiques Benavent ÍNDICE
6º Tema.- Accionamientos y actuadores eléctricos.
 Asignatura: Ingeniería de Máquinas [570004027] 5º curso de Ingenieros Industriales 6º Tema.- Accionamientos y actuadores eléctricos. Huelva, Noviembre 2008 Profesor: Rafael Sánchez Sánchez Página 1 de
Asignatura: Ingeniería de Máquinas [570004027] 5º curso de Ingenieros Industriales 6º Tema.- Accionamientos y actuadores eléctricos. Huelva, Noviembre 2008 Profesor: Rafael Sánchez Sánchez Página 1 de
SISTEMAS ELÉCTRICOS PROBLEMAS DE MÁQUINAS DE INDUCCIÓN
 SISTEMAS ELÉCTRICOS PROBLEMAS DE MÁQUINAS DE INDUCCIÓN MQ_IND_1 El rotor de un generador síncrono de seis polos gira a una velocidad mecánica de 1200 rev/min. 1º Expresar esta velocidad mecánica en radianes
SISTEMAS ELÉCTRICOS PROBLEMAS DE MÁQUINAS DE INDUCCIÓN MQ_IND_1 El rotor de un generador síncrono de seis polos gira a una velocidad mecánica de 1200 rev/min. 1º Expresar esta velocidad mecánica en radianes
GUÍA DE USUARIO Motor paso a paso REV. 1.0
 GUÍA DE USUARIO Motor paso a paso REV. 1.0 Ingeniería MCI Ltda. Luis Thayer Ojeda 0115 of. 1105, Providencia, Santiago, Chile. +56 2 23339579 www.olimex.cl cursos.olimex.cl info@olimex.cl GUÍA DE USUARIO:
GUÍA DE USUARIO Motor paso a paso REV. 1.0 Ingeniería MCI Ltda. Luis Thayer Ojeda 0115 of. 1105, Providencia, Santiago, Chile. +56 2 23339579 www.olimex.cl cursos.olimex.cl info@olimex.cl GUÍA DE USUARIO:
Fig 4-7 Curva característica de un inversor real
 Clase 15: Criterios de Comparación de Familias Lógicas. Características del Inversor Real Cuando comenzamos a trabajar con un inversor real comienzan a aparecer algunos inconvenientes que no teníamos en
Clase 15: Criterios de Comparación de Familias Lógicas. Características del Inversor Real Cuando comenzamos a trabajar con un inversor real comienzan a aparecer algunos inconvenientes que no teníamos en
variadores de velocidad electrónicos
 sumario arrancadores y variadores de velocidad electrónicos 1 principales tipos de variadores 2 principales funciones de los arrancadores y variadores de velocidad electrónicos 3 composición 4 principales
sumario arrancadores y variadores de velocidad electrónicos 1 principales tipos de variadores 2 principales funciones de los arrancadores y variadores de velocidad electrónicos 3 composición 4 principales
CONTROL DE VELOCIDAD PARA UN MOTOR SRM UTILIZANDO SISTEMAS DE SIMULACIÓN INTERACTIVA Y PROTOTIPADO RÁPIDO
 CONTROL DE VELOCIDAD PARA UN MOTOR SRM UTILIZANDO SISTEMAS DE SIMULACIÓN INTERACTIVA Y PROTOTIPADO RÁPIDO Juan Antonio Espinar Romero Ingeniería técnica industrial especialidad en electricidad EPSEVG,
CONTROL DE VELOCIDAD PARA UN MOTOR SRM UTILIZANDO SISTEMAS DE SIMULACIÓN INTERACTIVA Y PROTOTIPADO RÁPIDO Juan Antonio Espinar Romero Ingeniería técnica industrial especialidad en electricidad EPSEVG,
ÍNDICE DISEÑO DE CONTADORES SÍNCRONOS JESÚS PIZARRO PELÁEZ
 ELECTRÓNICA DIGITAL DISEÑO DE CONTADORES SÍNCRONOS JESÚS PIZARRO PELÁEZ IES TRINIDAD ARROYO DPTO. DE ELECTRÓNICA ÍNDICE ÍNDICE... 1 1. LIMITACIONES DE LOS CONTADORES ASÍNCRONOS... 2 2. CONTADORES SÍNCRONOS...
ELECTRÓNICA DIGITAL DISEÑO DE CONTADORES SÍNCRONOS JESÚS PIZARRO PELÁEZ IES TRINIDAD ARROYO DPTO. DE ELECTRÓNICA ÍNDICE ÍNDICE... 1 1. LIMITACIONES DE LOS CONTADORES ASÍNCRONOS... 2 2. CONTADORES SÍNCRONOS...
CAPITULO 4: LA UPS SOLAR Y SISTEMAS PARECIDOS EN EL MERCADO
 CAPÍTULO 4 46 CAPITULO 4: LA UPS SOLAR Y SISTEMAS PARECIDOS EN EL MERCADO 4.1 Introducción Este es el capítulo donde se presenta el proyecto, es decir, la UPS Solar que se ha diseñado junto con su explicación.
CAPÍTULO 4 46 CAPITULO 4: LA UPS SOLAR Y SISTEMAS PARECIDOS EN EL MERCADO 4.1 Introducción Este es el capítulo donde se presenta el proyecto, es decir, la UPS Solar que se ha diseñado junto con su explicación.
Motores y máquinas eléctricas TEMA 1. PRINCIPIOS BÁSICOS DE LA CONVERSIÓN DE LA ENERGÍA ELÉCTRICA... 11
 TEMA 1. PRINCIPIOS BÁSICOS DE LA CONVERSIÓN DE LA ENERGÍA ELÉCTRICA... 11 1.1 Introducción... 11 1.2 Definición y clasificación de las máquinas eléctricas... 11 1.3 Conceptos básicos... 13 1.3.1 Inductancia
TEMA 1. PRINCIPIOS BÁSICOS DE LA CONVERSIÓN DE LA ENERGÍA ELÉCTRICA... 11 1.1 Introducción... 11 1.2 Definición y clasificación de las máquinas eléctricas... 11 1.3 Conceptos básicos... 13 1.3.1 Inductancia
Capítulo I. Convertidores de CA-CD y CD-CA
 Capítulo I. Convertidores de CA-CD y CD-CA 1.1 Convertidor CA-CD Un convertidor de corriente alterna a corriente directa parte de un rectificador de onda completa. Su carga puede ser puramente resistiva,
Capítulo I. Convertidores de CA-CD y CD-CA 1.1 Convertidor CA-CD Un convertidor de corriente alterna a corriente directa parte de un rectificador de onda completa. Su carga puede ser puramente resistiva,
8. Tipos de motores de corriente continua
 8. Tipos de motores de corriente continua Antes de enumerar los diferentes tipos de motores, conviene aclarar un concepto básico que debe conocerse de un motor: el concepto de funcionamiento con carga
8. Tipos de motores de corriente continua Antes de enumerar los diferentes tipos de motores, conviene aclarar un concepto básico que debe conocerse de un motor: el concepto de funcionamiento con carga
Máster en Mecatrónica EU4M Master in Mechatronic and Micro-Mechatronic Systems BIPOLARES. Fundamentos de Ingeniería Eléctrica
 Máster en Mecatrónica U4M Master in Mechatronic and MicroMechatronic Systems IOLARS Fundamentos de Ingeniería léctrica Contenidos Funcionamiento Tipos de transistores Curvas características Resolución
Máster en Mecatrónica U4M Master in Mechatronic and MicroMechatronic Systems IOLARS Fundamentos de Ingeniería léctrica Contenidos Funcionamiento Tipos de transistores Curvas características Resolución
SONDA LAMBDA DE BANDA ANCHA VEHICULO: SEAT VW AUDI SKODA - OTROS INTRODUCCION: EL PORQUE DE LA SONDA LAMBDA DE BANDA ANCHA SONDA LAMBDA CONVENCIONAL
 SONDA LAMBDA DE BANDA ANCHA VEHICULO: SEAT VW AUDI SKODA - OTROS INTRODUCCION: Este articulo es sobre pruebas que se han realizado en dos tipos de sondas lambdas de banda ancha, tipo BOSCH y tipo NTK.
SONDA LAMBDA DE BANDA ANCHA VEHICULO: SEAT VW AUDI SKODA - OTROS INTRODUCCION: Este articulo es sobre pruebas que se han realizado en dos tipos de sondas lambdas de banda ancha, tipo BOSCH y tipo NTK.
Control electrónico de Motores: Conceptos Arranque motores AC Control electrónico de motores DC Control electrónicos motores AC
 Universidad de Jaén Escuela Politécnica Superior Electrónica Industrial Control electrónico de Motores: Conceptos Arranque motores AC Control electrónico de motores DC Control electrónicos motores AC 19/11/2007
Universidad de Jaén Escuela Politécnica Superior Electrónica Industrial Control electrónico de Motores: Conceptos Arranque motores AC Control electrónico de motores DC Control electrónicos motores AC 19/11/2007
Tipos de instalaciones
 Tipos de instalaciones Existen este infinidad de configuraciones, pero como técnicos debemos referirnos a las normalizadas por la NTE, la cual diferencia cinco tipos basados en número de circuitos y programas,
Tipos de instalaciones Existen este infinidad de configuraciones, pero como técnicos debemos referirnos a las normalizadas por la NTE, la cual diferencia cinco tipos basados en número de circuitos y programas,
TEMA 2. ESQUEMAS ELÉCTRICOS (II)
") TEMA 2. Esquemas eléctricos (II) 1 TEMA 2. ESQUEMAS ELÉCTRICOS (II) 1. SÍMBOLOS Y ESQUEMAS ELÉCTRICOS EN LAS NORMAS UNE EN 60.617...2 1.1. DISPOSITIVOS DE CONMUTACIÓN DE POTENCIA...2 1.1.1. Contactor...2
TEMA 2. Esquemas eléctricos (II) 1 TEMA 2. ESQUEMAS ELÉCTRICOS (II) 1. SÍMBOLOS Y ESQUEMAS ELÉCTRICOS EN LAS NORMAS UNE EN 60.617...2 1.1. DISPOSITIVOS DE CONMUTACIÓN DE POTENCIA...2 1.1.1. Contactor...2
CAPÍTULO 4. DISEÑO CONCEPTUAL Y DE CONFIGURACIÓN. Figura 4.1.Caja Negra. Generar. Sistema de control. Acumular. Figura 4.2. Diagrama de funciones
 CAPÍTULO 4 37 CAPÍTULO 4. DISEÑO CONCEPTUAL Y DE CONFIGURACIÓN Para diseñar el SGE, lo primero que se necesita es plantear diferentes formas en las que se pueda resolver el problema para finalmente decidir
CAPÍTULO 4 37 CAPÍTULO 4. DISEÑO CONCEPTUAL Y DE CONFIGURACIÓN Para diseñar el SGE, lo primero que se necesita es plantear diferentes formas en las que se pueda resolver el problema para finalmente decidir
CAPITULO 4. Inversores para control de velocidad de motores de
 CAPITULO 4. Inversores para control de velocidad de motores de inducción mediante relación v/f. 4.1 Introducción. La frecuencia de salida de un inversor estático está determinada por la velocidad de conmutación
CAPITULO 4. Inversores para control de velocidad de motores de inducción mediante relación v/f. 4.1 Introducción. La frecuencia de salida de un inversor estático está determinada por la velocidad de conmutación
INSTITUTO TECNOLOGICO DE COSTA RICA INGENIRIA ELECTRONICA ELECTRONICA DE POTENCIA PROF. ING. JUAN CARLOS JIMENEZ TEMA: CIRCUITOS INVERSORES
 INSTITUTO TECNOLOGICO DE COSTA RICA INGENIRIA ELECTRONICA ELECTRONICA DE POTENCIA PROF. ING. JUAN CARLOS JIMENEZ TEMA: CIRCUITOS INVERSORES Son sistemas que funcionan automáticamente, sin necesidad de
INSTITUTO TECNOLOGICO DE COSTA RICA INGENIRIA ELECTRONICA ELECTRONICA DE POTENCIA PROF. ING. JUAN CARLOS JIMENEZ TEMA: CIRCUITOS INVERSORES Son sistemas que funcionan automáticamente, sin necesidad de
Capítulo 2, descripción de las turbinas de viento y de los parques eólicos offshore. Capítulo 3, presentación de la máquina de inducción.
 Autor: Héctor A. López Carballido. Universidad de destino: Chalmers University of Technology Supervisor: Törbjorn Thiringer Coordinador académico: Julio Usaola Cotutor uc3m: Julio Usaola Fecha de lectura:
Autor: Héctor A. López Carballido. Universidad de destino: Chalmers University of Technology Supervisor: Törbjorn Thiringer Coordinador académico: Julio Usaola Cotutor uc3m: Julio Usaola Fecha de lectura:
9) UPS s: EN QUE CONSISTEN DE QUE Y COMO PROTEGEN
 UPS s: EN QUE CONSISTEN DE QUE Y COMO PROTEGEN") 9) UPS s: EN QUE CONSISTEN DE QUE Y COMO PROTEGEN En el mercado actual hay gran cantidad de diseños de UPS. Puede llegar a ser confuso determinar que tipo de equipo es el más conveniente para nuestra carga
9) UPS s: EN QUE CONSISTEN DE QUE Y COMO PROTEGEN En el mercado actual hay gran cantidad de diseños de UPS. Puede llegar a ser confuso determinar que tipo de equipo es el más conveniente para nuestra carga
Los sistemas de velocidad variables se pueden aplicar en aquellos sistemas en donde se requiere regular el flujo a diferentes cargas.
 CURSO BASICO DE APLICACIÓN DE VELOCIDAD VARIABLE EN SISTEMAS DE BOMBEO 5.1 GENERALIDADES A medida que la electrónica avanza y la generación de energía es cada vez más costosa, se torna rentable y necesario
CURSO BASICO DE APLICACIÓN DE VELOCIDAD VARIABLE EN SISTEMAS DE BOMBEO 5.1 GENERALIDADES A medida que la electrónica avanza y la generación de energía es cada vez más costosa, se torna rentable y necesario
FABRICACIÓN N ASISTIDA POR ORDENADOR
 FABRICACIÓN N ASISTIDA POR ORDENADOR Control Numérico E.T.S.I.. de Bilbao Curso 2010-2011 2011 Aitzol Lamikiz Mentxaka FABRICACIÓN N ASISTIDA POR ORDENADOR Control Numérico Tema 04: Accionamientos de M-HM
FABRICACIÓN N ASISTIDA POR ORDENADOR Control Numérico E.T.S.I.. de Bilbao Curso 2010-2011 2011 Aitzol Lamikiz Mentxaka FABRICACIÓN N ASISTIDA POR ORDENADOR Control Numérico Tema 04: Accionamientos de M-HM
El motor de reluctancia conmutado - Un motor eléctrico con gran par motor y poco volumen
 El motor de reluctancia conmutado - Un motor eléctrico con gran par motor y poco volumen J. Wolff, G. Gómez Funcionamiento El principio de funcionamiento del motor de reluctancia conmutado, que en muchas
El motor de reluctancia conmutado - Un motor eléctrico con gran par motor y poco volumen J. Wolff, G. Gómez Funcionamiento El principio de funcionamiento del motor de reluctancia conmutado, que en muchas
TEMA 6 CORRIENTE ALTERNA TRIFÁSICA
 TEMA 6 CORRIENTE ALTERNA TRIÁSICA VI.1 Generación de la CA trifásica VI. Configuración Y-D VI.3 Cargas equilibradas VI.4 Cargas desequilibradas VI.5 Potencias VI.6 actor de potencia Cuestiones 1 VI.1 GENERACIÓN
TEMA 6 CORRIENTE ALTERNA TRIÁSICA VI.1 Generación de la CA trifásica VI. Configuración Y-D VI.3 Cargas equilibradas VI.4 Cargas desequilibradas VI.5 Potencias VI.6 actor de potencia Cuestiones 1 VI.1 GENERACIÓN
Preguntas y respuestas técnicas sobre motores eléctricos traccionarios.
 Preguntas y respuestas técnicas sobre motores eléctricos traccionarios. Organización Autolibre. Cómo funciona un motor Eléctrico? Un motor eléctrico es un dispositivo que puede producir una fuerza cuando
Preguntas y respuestas técnicas sobre motores eléctricos traccionarios. Organización Autolibre. Cómo funciona un motor Eléctrico? Un motor eléctrico es un dispositivo que puede producir una fuerza cuando
1. Fenómenos de inducción electromagnética.
 1. Fenómenos de inducción electromagnética. Si por un circuito eléctrico, en forma de espira, por donde no circula corriente, se aproxima un campo magnético originado por la acción de un imán o un solenoide
1. Fenómenos de inducción electromagnética. Si por un circuito eléctrico, en forma de espira, por donde no circula corriente, se aproxima un campo magnético originado por la acción de un imán o un solenoide
Polo positivo: mayor potencial. Polo negativo: menor potencial
 CORRIENTE ELÉCTRICA Es el flujo de carga a través de un conductor Aunque son los electrones los responsables de la corriente eléctrica, está establecido el tomar la dirección de la corriente eléctrica
CORRIENTE ELÉCTRICA Es el flujo de carga a través de un conductor Aunque son los electrones los responsables de la corriente eléctrica, está establecido el tomar la dirección de la corriente eléctrica
La electricidad. La electricidad se origina por la separación o movimiento de los electrones que forman los átomos.
 1 La electricidad Es el conjunto de fenómenos físicos relacionados con la presencia y flujo de cargas eléctricas. Se manifiesta en una gran variedad de fenómenos como los rayos, la electricidad estática,
1 La electricidad Es el conjunto de fenómenos físicos relacionados con la presencia y flujo de cargas eléctricas. Se manifiesta en una gran variedad de fenómenos como los rayos, la electricidad estática,
En este capítulo se describe la forma de cómo se implementó el sistema de video
 En este capítulo se describe la forma de cómo se implementó el sistema de video por medio de una cámara web y un servomecanismo que permitiera al usuario ver un experimento en el mismo instante en que
En este capítulo se describe la forma de cómo se implementó el sistema de video por medio de una cámara web y un servomecanismo que permitiera al usuario ver un experimento en el mismo instante en que
CONCEPTOS DE LA FUERZA
 CONCEPTOS DE LA FUERZA PAPEL DE LA FUERZA EN EL RENDIMIENTO DEPORTIVO La mejora de la fuerza es un factor importante en todas las actividades deportivas, y en algunos casos determinantes (en el arbitraje
CONCEPTOS DE LA FUERZA PAPEL DE LA FUERZA EN EL RENDIMIENTO DEPORTIVO La mejora de la fuerza es un factor importante en todas las actividades deportivas, y en algunos casos determinantes (en el arbitraje
QUE ES LA CORRIENTE ALTERNA?
 QUE ES LA CORRIENTE ALTERNA? Se describe como el movimiento de electrones libres a lo largo de un conductor conectado a un circuito en el que hay una diferencia de potencial. La corriente alterna fluye
QUE ES LA CORRIENTE ALTERNA? Se describe como el movimiento de electrones libres a lo largo de un conductor conectado a un circuito en el que hay una diferencia de potencial. La corriente alterna fluye
Motores de corriente alterna
 Motores de corriente alterna María Jesús Vallejo Fernández MOTORES DE CORRIENTE ALTERNA. INTRODUCCIÓN 1 MOTORES DE INDUCCIÓN 1 Principio de funcionamiento del motor asíncrono 2 CARACTERÍSTICAS INDUSTRIALES
Motores de corriente alterna María Jesús Vallejo Fernández MOTORES DE CORRIENTE ALTERNA. INTRODUCCIÓN 1 MOTORES DE INDUCCIÓN 1 Principio de funcionamiento del motor asíncrono 2 CARACTERÍSTICAS INDUSTRIALES
Componentes: RESISTENCIAS FIJAS
 ELECTRÓNICA ELECTRÓNICA Componentes: RESISTENCIAS FIJAS Componentes: RESISTENCIAS VARIABLES Componentes: RESISTENCIAS DEPENDIENTES Componentes: RESISTENCIAS DEPENDIENTES Componentes: CONDENSADORES Componentes:
ELECTRÓNICA ELECTRÓNICA Componentes: RESISTENCIAS FIJAS Componentes: RESISTENCIAS VARIABLES Componentes: RESISTENCIAS DEPENDIENTES Componentes: RESISTENCIAS DEPENDIENTES Componentes: CONDENSADORES Componentes:
3. Qué warrant elegir?
 3 QUE WARRANT ELEGIR? 3.1. Qué subyacente? 3.2. Qué vencimiento? 3.3. Qué strike? 3.4. La relación sensibilidad - delta 3.5. Ejercicios del capítulo 3 3.6. Respuestas a los ejercicios 3. Qué warrant elegir?
3 QUE WARRANT ELEGIR? 3.1. Qué subyacente? 3.2. Qué vencimiento? 3.3. Qué strike? 3.4. La relación sensibilidad - delta 3.5. Ejercicios del capítulo 3 3.6. Respuestas a los ejercicios 3. Qué warrant elegir?
Instrumentación y Ley de OHM
 Instrumentación y Ley de OHM A) INSTRUMENTACIÓN 1. OBJETIVOS. 1. Conocer el manejo de instrumentos y materiales de uso corriente en los experimentos de electricidad y magnetismo. 2. Conocer el área de
Instrumentación y Ley de OHM A) INSTRUMENTACIÓN 1. OBJETIVOS. 1. Conocer el manejo de instrumentos y materiales de uso corriente en los experimentos de electricidad y magnetismo. 2. Conocer el área de