Manual de Experimentos
|
|
|
- María Ángeles Duarte Gil
- hace 6 años
- Vistas:
Transcripción


1 Manual de Experimentos utilizando el robot LEGO MINDSTORM Elaborado Por: Adrián Enciso Almanza José Ángel González Fraga Omar Álvarez Xochihua Valeria Zuñiga Pringle Ensenada Baja California, Octubre del 2015
2 Contenido Introducción... 2 Objetivo ) El Ladrillo o Brick ) Los motores ) Los sensores ) BrickOS (o LegOS) ) LeJOS ) Not Quite C... 4 Experimento 1: Medidor de luz... 6 Instrucciones... 6 Experimento 2: Medidor de sonido... 8 Instrucciones... 8 Como usarlo... 8 Experimento 3: Radar... 9 Instrucciones Como usarlo Experimento 4: Medidor de volumen y área Instrucciones Experimento 5: Brazo robótico Descripción Instrucciones Como usarlo Experimento 6: Alarma de movimiento Experimento 7: Patea la bola Descripción Instrucciones Experimento 8: Transmisión de tres velocidades Descripción Instrucciones Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 1

3 Introducción El presente manual tiene como propósito ser una guía clara y específica de material de apoyo educativo que sirva como herramienta para la realización de proyectos de robótica Objetivo Otorga al estudiante la capacidad de aprender importantes conocimientos a través de la construcción, programación, y prueba de los robots. Durante este proceso el estudiante contará con conceptos clave que se relacionan con las ciencias de la computación, matemáticas, ciencias en general, trabajo en equipo y comunicación. Al mismo tiempo, el estudiante aprende el proceso de explorar, planificar y resolver problemas. Conoce a LEGO NXT Es turno de conocer a una máquina que ha venido a revolucionar los legos tradicionales, que actualmente millones de niños juegan alrededor del mundo. Un juego de robótica desarrollado por la compañía LEGO, el cual posee elementos básicos de la teoría robótica, como la unión de piezas (basado en su idea de los legos tradicionales) y la programación de acciones. Fue comercializado la primera vez en Puede ser usado para construir un modelo de sistemas integrado por partes electromecánicas y controlados por una computadora. Prácticamente, una gran variedad de personajes pueden ser representado con las piezas de este robot, tal como en la vida real. Para su operación, se distribuye con un lenguaje de programación basado en una Interfaz Gráfica (GUI, por sus siglas en inglés) de Robolab. Un Lego Mindstorm NXT está compuesto por: Un ladrillo (brick), tres motores y cuatro sensores. El cual puede ser armado según la creatividad y originalidad de su dueño, en la Figura 1, se muestra un androide, una de tantas formas en que puede ser armado un NXT. Figura 1 Cortesía: Overview Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 2
, además cuenta con conexión bluetooth (ver Figura 2).")


4 1) El Ladrillo o Brick El ladrillo, como comúnmente se le llama a una de las piezas principales de armado, está integrado por: un micro controlador 32-bit ARM7, con pantalla LCD gráfico 100 x 64 pixeles, con conectores de entrada y salida para los tres diferentes motores y cuatro diferentes sensores (descritos posteriormente), además cuenta con conexión bluetooth (ver Figura 2). 2) Los motores Figura 2 Cortesía: Overview Los motores, a los cuales también se les conocen como actuadores, son servomotores con sensores de rotación integrados, con capacidad de manejo en grados y potencia. El motor principal se encuentra en la parte más gruesa y hay una serie de engranes que mueven la rueda naranja, estos además ayudan a tener una mayor fuerza y aceleración del motor (ver Figura 3). Lo que hace especialmente interesante al motor es el sensor de rotación dentro del motor, por lo que el NXT sabe exactamente cuántas veces este eje ha rotado, eso quiere decir que se pueden controlar los motores de modo que se puede indicar la velocidad o la distancia a la que quieres que vaya. Figura 3 Cortesía: com/overview 3) Los sensores El sensor de luz, se usa para medir la intensidad de la luz y se puede hacer de dos maneras, si se necesita la luz proveniente del sol, se usa el led rojo, esa luz rebota en la superficie y es detectada por el sensor o bien, se puede apagar el led y el sensor detecta la luz del ambiente en la habitación (ver Figura 4-a). El sensor ultrasónico, el cual mide distancias, puede detectar objetos hasta a cuatro pies de distancia, lo cual le permite al robot NXT saber lo que pasa con su entorno, lo que hay alrededor de su mundo (ver Figura 4-b). El sensor de sonido, mide niveles de sonido de hasta 90dB, inclusive no percibidos por el oído humano (ver Figura 4-c). Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 3

 BrickOS (o LegOS) BrickOS es una librería de instrucciones y programas que permiten al programador ingresar de")

5 El sensor de tacto, se usa para decir que hay contacto con algo, la parte naranja del sensor, es la parte que se mueve de adentro a afuera y hay una parte con una cruz, dentro de él, por lo que puedes poner un eje de lego para hacer contacto más fácil (ver Figura 4-d). a) Sensor de Luz b) Sensor ultrasónic o c) sensor de sonido d) sensor de tacto Figura 4 Cortesía: Después aparecieron lenguajes alternativos de programación tales como: 4) BrickOS (o LegOS) BrickOS es una librería de instrucciones y programas que permiten al programador ingresar de forma directa a la BIOS del bloque, instalar un micro sistema operativo con su respectivo núcleo operativo y librerías necesarias para enlazar todos los recursos de que dispone el bloque. Para ser instalado debe sobrescribir el área donde se encuentra el framework original, pero con este cambio, el bloque puede ser programado con lenguajes convencionales como C, C++ y ensamblador. 5) LeJOS LejOS a diferencia de BrickOS, no instala un sistema operativo en reemplazo del firmware del bloque RCX, sino que instala una máquina virtual de Java, lo cual permite que el bloque sea programable en el lenguaje Java, no dependiendo de un compilador o un sistema operativo para ser reemplazado. 6) Not Quite C Not Quite C, otra forma de programación de este tipo de robots, es el único conjunto de programas que no reemplaza el framework original del bloque, pero eso representa una desventaja, porque debe coexistir junto al framework original, por lo tanto emular sus instrucciones, haciendo que el proceso sea más lento que por la metodología de reemplazar el framework, utiliza como Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 4
6 lenguaje de programación una versión propia de C. Además, es compatible con la mayoría de la línea de Mindstorms, lo cual lo hace el más extenso de todos los lenguajes alternativos, debido a sus capacidades de migrar entre plataformas de los bloques de RCX. Cabe mencionar que estos lenguajes, a excepción de la distribuida por LEGO, son técnicos e imperativos, desarrollados pensando en que serán utilizados por usuarios experimentados. Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 5



7 Experimento 1: Medidor de luz Descripción Es un sensor de color que se puede utilizar para probar las lecturas de luz. El brillo detectado se muestra continuamente en la pantalla NXT tanto numérica como gráficamente. Uso de los botones en el NXT puede activar la iluminación de la lámpara LED del sensor para medir la luz reflejada o fuera de medir la luz ambiente (externo), y por la luz reflejada, puede elegir para iluminar la lámpara en rojo, verde o azul, y ver cómo esto afecta a las lecturas. Instrucciones Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 6





8 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 7




9 Experimento 2: Medidor de sonido Descripción Consiste en conectar un sensor de sonido NXT y muestra un gráfico de la intensidad de sonido detectada. Instrucciones Hacer un mango para el sensor de sonido NXT como en el ejemplo. 1 Utilizando el cable más largo, conecte el sensor de sonido al puerto 2 en el NXT. 2 Como usarlo Sostenga el ladrillo NXT, en un lado y el mango sensor de sonido en la otra mano. Utilice el sensor como un micrófono, o apuntar a algo que está haciendo el sonido y ver la pantalla del NXT. Para congelar la pantalla al final de una pasada a través de (aproximadamente 1 segundo de sonido), pulse el botón de color naranja en el NXT durante el pase que desea congelar. A continuación, pulse el botón naranja de nuevo para descongelar y comenzar otra pasada. Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 8




10 Experimento 3: Radar Descripción Un " radar" de rotación mediante el sensor de ultrasonidos escanea un lado a otro y dibuja un mapa de objetos detectados en la pantalla del NXT. El radar también emitirá un tono indicando que se detectan objetos. Cuanto más cerca esté el objeto, más fuerte sonará. Instrucciones Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 9








11 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 10

, como se muestra en la imagen del paso 17.")

.")
12 Como usarlo Levante el radar y utilice el tren en la parte inferior para ajustar el ángulo de partida de la cabeza del sensor con la mano para que esté apuntando hacia la izquierda (hacia la pantalla del NXT), como se muestra en la imagen del paso 17. Asegúrese de que el cable que va al sensor está colgando como se muestra y no se envuelve alrededor de la otra manera. Coloque el radar en un área abierta (como en el centro de la pista de una habitación). Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 11
13 Ejecute el programa para iniciar el radar. El radar está configurado para detectar objetos de alrededor de 2 pulgadas de distancia a aproximadamente 30 pulgadas de distancia. Trate de colocar varios objetos alrededor del radar para ver la forma en que se detectan. Párese detrás del radar (mirando a la pantalla del NXT boca arriba) cuando se mira en el mapa, de lo contrario el radar detectará todo usted! Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 12







14 Experimento 4: Medidor de volumen y área Descripción Es un medidor de volumen que captura la medida de un objeto: largo, ancho y alto, y regresa el resultado. Instrucciones Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 13





15 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 14




16 Experimento Brazo robótico para que sea recoger y mover objetos. Descripción Este brazo robótico utiliza tres motores para permitir que este mecanismo gire izquierda y derecha, levante hacia arriba y abajo, y abrir y cerrar la garra. Utilizando el programa proporcionado, usted puede controlar las acciones con los tres botones en el ladrillo NXT y el botón del sensor táctil, así que usted puede utilizar los controles Instrucciones Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 15







17 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 16



18 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 17







19 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 18









20 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 19








21 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 20









22 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 21









23 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 22







24 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 23



25 Se necesitan cuatro alambres en este paso: Utilice el cable más corto para conectar el sensor táctil al puerto 1 en el NXT. Utilice uno de los cables más largos para conectar el motor de garra al puerto C en el NXT. Utilice uno de los cables de media longitud para conectar el motor del giradiscos al puerto A en el NXT. Utilice uno de los cables de media longitud para conectar el brazo de elevación del motor en el puerto B en el NXT. Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 24


26 64 Como usarlo Al pulsar el botón naranja (Enter) en el ladrillo NXT, alternará los controles entre los modos de "levantar" "Rotar". En el modo "Girar", los de izquierda y derecha gris botones de flecha del ladrillo NXT rotarán el brazo izquierdo y la derecha todo el tiempo que mantiene presionado el botón. En el modo "Levantar", los botones izquierdos y derecho se levante el brazo arriba y abajo todo el tiempo que mantiene presionado el botón. Al presionar el botón del sensor táctil hará que el interruptor de garra entre agarrar y soltar. Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 25




27 Experimento 6: Alarma de movimiento Descripción El sensor ultrasónico se utiliza para hacer un simple sensor que puede detectar cuando detecta el movimiento, entonces suena una alarma usando el altavoz del NXT. Instrucciones 1 Como usarlo Al ejecutar el programa, se detectará el movimiento de una persona. 2 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 26





28 Experimento 7: Patea la bola Descripción Cuando golpeas una pelota, articulación de la cadera y de la rodilla músculos conjuntos trabajan juntos para producir una especie de efecto de crack-látigo para aumentar la velocidad y la fuerza al golpear la pelota. Este proyecto sincroniza los motores NXT en sus articulaciones para producir un efecto similar para dar la pelota NXT un buen golpe. Instrucciones Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 27







29 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 28







30 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 29



31 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 30
32 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 31







33 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 32



34 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 33







35 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 34



36 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 35


 en la pantalla del NXT!")


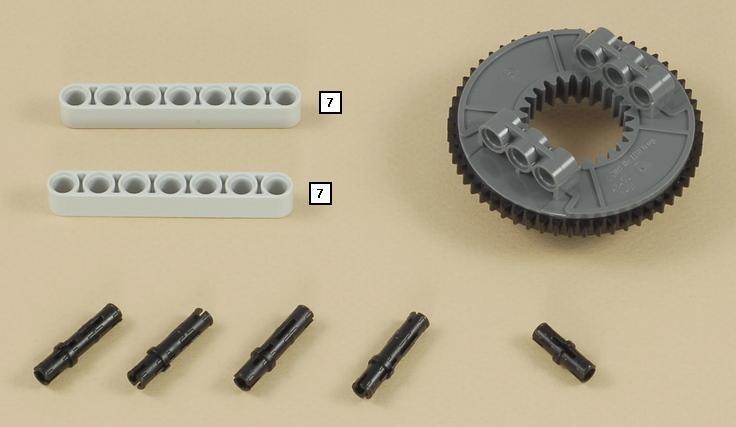
37 Experimento 8: Transmisión de tres velocidades. Descripción Esta transmisión tiene tres relaciones de transmisión diferentes, que se pueden desplazar mediante el uso de la palanca de cambio de marchas. También cuenta con un embrague realista de accionamiento manual para cambios suaves, un pedal de gas con la opción "control de crucero", y un tacómetro (visualización de la velocidad del motor) en la pantalla del NXT! El poder transferencias de motor a través del embrague y la transmisión de un conjunto de tres ruedas giratorias, que actúan como pesas para hacer que el motor trabaje más duro y para permitir que el mecanismo para la costa al apretar el embrague o golpear neutral entre los engranajes. Al cambiar a través de las diferentes artes, usted verá la diferencia resultante en la velocidad de las ruedas giratorias (lento, medio y rápido). Instrucciones Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 36










38 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 37










39 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 38






40 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 39








41 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 40






42 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 41








43 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 42






44 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 43










45 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 44







46 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 45









47 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 46




48 Cuerpo Académico: Tecnologías de la Información y Visualización (CATIV) 47
Pág. 2. Contenidos. Introducción. Herramientas. Experimentos. Conclusiones. Trabajos futuros
 Pág. 2 Contenidos Introducción Herramientas Experimentos Conclusiones Trabajos futuros Pág. 3 Introducción El robot LEGO Mindstorms NXT: Creado en conjunto por el MIT y LEGO. Robot educativo. Con motores
Pág. 2 Contenidos Introducción Herramientas Experimentos Conclusiones Trabajos futuros Pág. 3 Introducción El robot LEGO Mindstorms NXT: Creado en conjunto por el MIT y LEGO. Robot educativo. Con motores
Instalación Configuración de Sistema Actividad13. Este documento está dividido en 3 secciones:
 Guía de configuración Joystick VEXNet El VEXnet Joystick permite algo más que el control remoto del robot. También proporciona la comunicación inalámbrica entre la computadora y el VEX cortex (microcontrolador),
Guía de configuración Joystick VEXNet El VEXnet Joystick permite algo más que el control remoto del robot. También proporciona la comunicación inalámbrica entre la computadora y el VEX cortex (microcontrolador),
TALLER DIAGRAMAS DE FLUJO EN LEGO MINDSTORMS
 TALLER DIAGRAMAS DE FLUJO EN LEGO MINDSTORMS Cuando se quiere realizar un programa bien pensado para solucionar problemas de robótica es necesario generar algoritmos que permitan llegar a soluciones hipotéticas
TALLER DIAGRAMAS DE FLUJO EN LEGO MINDSTORMS Cuando se quiere realizar un programa bien pensado para solucionar problemas de robótica es necesario generar algoritmos que permitan llegar a soluciones hipotéticas
Pasamos a describir los componentes de cada una de estas partes y su ensamblaje total.
 Libro de Actividades de Robótica Educativa 2.2.1. Robot de sumo El robot está compuesto por: Tracción derecha Tracción izquierda Cuerpo Rueda delantera Detector Cabeza Pasamos a describir los componentes
Libro de Actividades de Robótica Educativa 2.2.1. Robot de sumo El robot está compuesto por: Tracción derecha Tracción izquierda Cuerpo Rueda delantera Detector Cabeza Pasamos a describir los componentes
Introducción de la aplicación de programación LEGO MINDSTORMS Education EV3
 Introducción de la aplicación de programación LEGO MINDSTORMS Education EV3 LEGO Education se complace en proporcionarle la edición para tableta del software LEGO MINDSTORMS Education EV3. Una forma divertida
Introducción de la aplicación de programación LEGO MINDSTORMS Education EV3 LEGO Education se complace en proporcionarle la edición para tableta del software LEGO MINDSTORMS Education EV3. Una forma divertida
DIEGO MARÍN LIBRERO EDITOR
 DM DIEGO MARÍN LIBRERO EDITOR Información: Fuensanta Marín-Vegara Marín Teléfono fijo: Librería Antaño 968232050 968232866 Móvil: 696294386 fuensanta@diegomarin.com Fechas de los cursos de ROBÓTICA: Semana
DM DIEGO MARÍN LIBRERO EDITOR Información: Fuensanta Marín-Vegara Marín Teléfono fijo: Librería Antaño 968232050 968232866 Móvil: 696294386 fuensanta@diegomarin.com Fechas de los cursos de ROBÓTICA: Semana
Guía de instalación y control del software. DCANXT Remote-Control
 Guía de instalación y control del software DCANXT Remote-Control Sitio de descarga: http://www.dcatechnologies.com/index.html Descripción Control remoto DCA NXT permite a un robot NXT ser controlado de
Guía de instalación y control del software DCANXT Remote-Control Sitio de descarga: http://www.dcatechnologies.com/index.html Descripción Control remoto DCA NXT permite a un robot NXT ser controlado de
Descripción general del lienzo de programación
 Software de Control y Automatización WeDo El software Robótica WeDo se utiliza para crear programas arrastrando y soltando bloques en la pantalla del computador. Varios bloques controlan el motor, el sensor
Software de Control y Automatización WeDo El software Robótica WeDo se utiliza para crear programas arrastrando y soltando bloques en la pantalla del computador. Varios bloques controlan el motor, el sensor
Android 2.3 Tablet Manual de Usuario
 Contenido. Contenido....1 2. Contenido de la caja...2 3. Perspectiva del producto...3 4. Encendido y apagado...4 Hibernar: Pulsar el botón de encendido para que la tableta se ponga en modo de hibernación
Contenido. Contenido....1 2. Contenido de la caja...2 3. Perspectiva del producto...3 4. Encendido y apagado...4 Hibernar: Pulsar el botón de encendido para que la tableta se ponga en modo de hibernación
Guía rápida. SoundGate. Bernafon SoundGate. Control de volumen y cambio de programas. Teléfono. Conexión de música, p.ej. MP3. Bluetooth música/audio
 Bernafon SoundGate SoundGate Guía rápida Control de volumen y cambio de programas Teléfono Conexión de música, p.ej. MP3 Bluetooth música/audio Indicador del estado de la batería Esta guía es sólo una
Bernafon SoundGate SoundGate Guía rápida Control de volumen y cambio de programas Teléfono Conexión de música, p.ej. MP3 Bluetooth música/audio Indicador del estado de la batería Esta guía es sólo una
Dr. D. José Manuel Palomares. LEGO Mindstorms NXT. Introducción a la Robótica
 LEGO Mindstorms NXT 1 Robots Qué es un robot? Una máquina capaz de realizar tareas autónomas de interacción con algún determinado entorno físico. De manera análoga, se utiliza bots para referirse a programas
LEGO Mindstorms NXT 1 Robots Qué es un robot? Una máquina capaz de realizar tareas autónomas de interacción con algún determinado entorno físico. De manera análoga, se utiliza bots para referirse a programas
Altavoz Sonar II con LED y Bluetooth
 Altavoz Sonar II con LED y Bluetooth Manual del usuario 33047 Instrucciones Importantes de Seguridad Mantenga el altavoz alejado del agua y otros líquidos. Mantenga el altavoz alejado de cualquier fuente
Altavoz Sonar II con LED y Bluetooth Manual del usuario 33047 Instrucciones Importantes de Seguridad Mantenga el altavoz alejado del agua y otros líquidos. Mantenga el altavoz alejado de cualquier fuente
1.- Conecta la cámara web a un puerto USB disponible, tu sistema la detectará y comenzara la instalación de los controladores
 Antes de comenzar a usar el producto es importante que leas este manual. MANUAL DE USUARIO PC-320425 Contenido Cámara para computadora 1 pieza Guía de usuario 1 pieza Instalación 1.- Conecta la cámara
Antes de comenzar a usar el producto es importante que leas este manual. MANUAL DE USUARIO PC-320425 Contenido Cámara para computadora 1 pieza Guía de usuario 1 pieza Instalación 1.- Conecta la cámara
Programación de Robots Lego con
 Programación de Robots Lego con LabVIEW Benjamin Celis Ingeniero de Aplicaciones, National Instruments 3 Por qué la Academia? En centros educativos apoyamos el camino de los futuros ingenieros y científicos.
Programación de Robots Lego con LabVIEW Benjamin Celis Ingeniero de Aplicaciones, National Instruments 3 Por qué la Academia? En centros educativos apoyamos el camino de los futuros ingenieros y científicos.
Auricular Calisto II de Plantronics con Adaptador Bluetooth USB Guía del usuario FEBRERO 2013
 Auricular Calisto II de Plantronics con Adaptador Bluetooth USB Guía del usuario FEBRERO 2013 56-K61S-23016 Contenido Contenido del paquete... 1 Características del producto... 2 Encendido del auricular
Auricular Calisto II de Plantronics con Adaptador Bluetooth USB Guía del usuario FEBRERO 2013 56-K61S-23016 Contenido Contenido del paquete... 1 Características del producto... 2 Encendido del auricular
JABRA EVOLVE 65. Manual del usuario. jabra.com/evolve65
 Manual del usuario jabra.com/evolve65 2014 GN Netcom A/S / GN Netcom US, Inc. Todos los derechos reservados. Jabra es una marca registrada de GN Netcom A/S. Todas las otras marcas incluidas en este documento
Manual del usuario jabra.com/evolve65 2014 GN Netcom A/S / GN Netcom US, Inc. Todos los derechos reservados. Jabra es una marca registrada de GN Netcom A/S. Todas las otras marcas incluidas en este documento
EUROCIENCIA TICA EDUCATIVA BÓ RO
 EQUIPO DE CONSTRUCCIÓN Y MONTAJE Conjunto de piecerío para construcción de modelos propuestos (en la guía de utilización del equipo) y de modelos de fabricación propia (desarrollados por el alumno) que
EQUIPO DE CONSTRUCCIÓN Y MONTAJE Conjunto de piecerío para construcción de modelos propuestos (en la guía de utilización del equipo) y de modelos de fabricación propia (desarrollados por el alumno) que
OBJETIVOS: CONTENIDO:
 DOCENTE FORMADOR: INTRODUCCIÓN: 1 Lic. ELÍAS RIVERA DÁVILA La Robótica Educativa es la generación de entornos de Aprendizaje basados principalmente en la iniciativa y la actividad de los estudiantes. Ellos
DOCENTE FORMADOR: INTRODUCCIÓN: 1 Lic. ELÍAS RIVERA DÁVILA La Robótica Educativa es la generación de entornos de Aprendizaje basados principalmente en la iniciativa y la actividad de los estudiantes. Ellos
Bienvenidos IMPORTANTE:
 MANUAL DEL USUARIO 2 Bienvenidos 1. Gracias por adquirir nuestra tableta Proton Tab2 Multimedia Internet Device X-VIEW. 2. Para operar con la unidad correctamente, por favor lea el Manual del Usuario cuidadosamente
MANUAL DEL USUARIO 2 Bienvenidos 1. Gracias por adquirir nuestra tableta Proton Tab2 Multimedia Internet Device X-VIEW. 2. Para operar con la unidad correctamente, por favor lea el Manual del Usuario cuidadosamente
Lego Nxt desde Physical Etoys
 Lego Nxt desde Physical Etoys Physical Etoys es un proyecto de software que permite controlar, en tiempo real, robots de Lego Mindstorms Nxt usando una conexión Bluetooth. SqueakNxt es un módulo de Physical
Lego Nxt desde Physical Etoys Physical Etoys es un proyecto de software que permite controlar, en tiempo real, robots de Lego Mindstorms Nxt usando una conexión Bluetooth. SqueakNxt es un módulo de Physical
ÍNDICE 1INTRODUCCIÓN AL ROBOT LEGO-MINDSTORMS NXT CÓMO ACTÚA UN ROBOT?...3 3COMPONENTES DEL LEGO MINDSTORMS NXT Piezas Lego...
 ÍNDICE 1INTRODUCCIÓN AL ROBOT LEGO-MINDSTORMS NXT 2.0...2 2 CÓMO ACTÚA UN ROBOT?...3 3COMPONENTES DEL LEGO MINDSTORMS NXT 2.0...5 3.1Piezas Lego...5 3.2Sensores...5 3.3Motores y lámparas...6 3.4Ladrillo
ÍNDICE 1INTRODUCCIÓN AL ROBOT LEGO-MINDSTORMS NXT 2.0...2 2 CÓMO ACTÚA UN ROBOT?...3 3COMPONENTES DEL LEGO MINDSTORMS NXT 2.0...5 3.1Piezas Lego...5 3.2Sensores...5 3.3Motores y lámparas...6 3.4Ladrillo
CONTENIDO DEL CURSO. - Semana 1 - Capacitación. - Entrenamiento - Competencia. - Semana 2
 CONTENIDO DEL CURSO - Semana 1 - Capacitación - Semana 2 - Entrenamiento - Competencia ROBÓTICA SEGÚN RAES Capacitación y competencia Video pruebadecompetencia2008.mpg ROBÓTICA La Robótica es la ciencia
CONTENIDO DEL CURSO - Semana 1 - Capacitación - Semana 2 - Entrenamiento - Competencia ROBÓTICA SEGÚN RAES Capacitación y competencia Video pruebadecompetencia2008.mpg ROBÓTICA La Robótica es la ciencia
1 ESQUEMA 2 MANDO CONTROL 3 INFORMACIÓN SOBRE LAS PILAS 4 OPERACIONES SIMPLES OPERACIONES AVANZADAS 5 MODO LIBRE 6 MODO SEGURO 7 OBJETIVO LÁSER
 1 ESQUEMA 2 MANDO CONTROL 3 INFORMACIÓN SOBRE LAS PILAS 4 OPERACIONES SIMPLES OPERACIONES AVANZADAS 5 MODO LIBRE 6 MODO SEGURO 7 OBJETIVO LÁSER 8 CONTROL DEL COMPORTAMIENTO 9 SENSORES TÁCTILES 10 SENSORES
1 ESQUEMA 2 MANDO CONTROL 3 INFORMACIÓN SOBRE LAS PILAS 4 OPERACIONES SIMPLES OPERACIONES AVANZADAS 5 MODO LIBRE 6 MODO SEGURO 7 OBJETIVO LÁSER 8 CONTROL DEL COMPORTAMIENTO 9 SENSORES TÁCTILES 10 SENSORES
INTENSIDAD DE LUZ. Sensores Fisicoquímicos del Plan Ceibal. Autor. Versión 1 Fecha. Ubicación FOTO. Plan Ceibal Lab. Digitales Sensores
 INTENSIDAD DE LUZ Sensores Fisicoquímicos del Plan Ceibal. FOTO Autor Plan Ceibal Lab. Digitales Sensores Versión 1 Fecha Ubicación Índice Introducción:...3 Objetivo:...3 Preguntas iniciales:...3 Teoría:...3
INTENSIDAD DE LUZ Sensores Fisicoquímicos del Plan Ceibal. FOTO Autor Plan Ceibal Lab. Digitales Sensores Versión 1 Fecha Ubicación Índice Introducción:...3 Objetivo:...3 Preguntas iniciales:...3 Teoría:...3
CONTENIDO. 2015 Innovación y Control de México S.A de C.V. Prohibida su reproducción Total o Parcial.
 Manual Programación Innovación y Control de México S.A de C.V. Tel. 01 (33) 3342-3780 / 3126-1739 ventas@inncomex.com.mx CONTENIDO Introducción.... 3 Programación.... 3 descargar e instalar arduino IDE...
Manual Programación Innovación y Control de México S.A de C.V. Tel. 01 (33) 3342-3780 / 3126-1739 ventas@inncomex.com.mx CONTENIDO Introducción.... 3 Programación.... 3 descargar e instalar arduino IDE...
ÍNDICE. Conceptos básicos de electrónica digital y analógica. Familiarización con el Kit Arduino UNO. Familiarización con el Kit Lego Mindstorm EV3
 La Robótica Educativa Objetivos generales Áreas de conocimiento Desarrollo de inteligencias Metodología Retos Recursos Contenidos Historia de la robótica ÍNDICE Conceptos básicos de electrónica digital
La Robótica Educativa Objetivos generales Áreas de conocimiento Desarrollo de inteligencias Metodología Retos Recursos Contenidos Historia de la robótica ÍNDICE Conceptos básicos de electrónica digital
Es un programa educativo Los alumnos podrán desarrollar su creatividad
 Es un programa educativo en el cual los alumnos podrán desarrollar sus habilidades para resolver retos en equipo. El programa permite la que los alumnos descubran y pongan en práctica sus capacidades de
Es un programa educativo en el cual los alumnos podrán desarrollar sus habilidades para resolver retos en equipo. El programa permite la que los alumnos descubran y pongan en práctica sus capacidades de
DVC1000 MANUAL DE USUARIO. Tu seguridad en la Ruta CÁMARA DVR PARA VEHICULO. by SOLOMON
 DVC1000 CÁMARA DVR PARA VEHICULO MANUAL DE USUARIO Tu seguridad en la Ruta by SOLOMON No se permite copiar total o parcial este Manual, todos los derechos reservados por FUNCIONES E IMAGENES DEL PRODUCTO
DVC1000 CÁMARA DVR PARA VEHICULO MANUAL DE USUARIO Tu seguridad en la Ruta by SOLOMON No se permite copiar total o parcial este Manual, todos los derechos reservados por FUNCIONES E IMAGENES DEL PRODUCTO
Robótica en el Aula. Robots Avanzados de Ampliación. Gabriel Ocaña Rebollo. Ingeniero Superior de Telecomunicaciones Profesor E.S.
 Robótica en el Aula Robots Avanzados de Ampliación Gabriel Ocaña Rebollo Ingeniero Superior de Telecomunicaciones Profesor E.S. de Tecnología CEP El Ejido, Noviembre 2009 Índice Versión comercial de LEGO
Robótica en el Aula Robots Avanzados de Ampliación Gabriel Ocaña Rebollo Ingeniero Superior de Telecomunicaciones Profesor E.S. de Tecnología CEP El Ejido, Noviembre 2009 Índice Versión comercial de LEGO
Procesador de sonido serie DA de Plantronics. Guía de usuario
 Procesador de sonido serie DA de Plantronics Guía de usuario Índice Bienvenido 3 Intensidad 4 Software de Plantronics 5 Instalar Plantronics Hub 5 Iniciar Hub 5 Fichas de Hub 5 Utilizar el auricular 6
Procesador de sonido serie DA de Plantronics Guía de usuario Índice Bienvenido 3 Intensidad 4 Software de Plantronics 5 Instalar Plantronics Hub 5 Iniciar Hub 5 Fichas de Hub 5 Utilizar el auricular 6
Semillero: Robótica COMPETENCIAS A DESEMPEÑOS CONTENIDOS TEMÁTICOS DESARROLLAR
 Nivel Básico: Principiantes I Grado: Primero. Viernes 2:30 4:30 PERIODO I: Desarrollar motricidad fina en la Adquiere conceptos simples de INICIACIÓN A LA ROBÓTICA: construcción de estructuras robótica
Nivel Básico: Principiantes I Grado: Primero. Viernes 2:30 4:30 PERIODO I: Desarrollar motricidad fina en la Adquiere conceptos simples de INICIACIÓN A LA ROBÓTICA: construcción de estructuras robótica
LEGO MINDSTORMS Education: primeros pasos. Ciencias Tecnología Ingeniería Matemáticas TIC y programación
 LEGO MINDSTORMS Education: primeros pasos Ciencias Tecnología Ingeniería Matemáticas TIC y programación MINDSTORMS MINDSTORMS Education es un recurso ideal para el programa curricular. Los estudiantes
LEGO MINDSTORMS Education: primeros pasos Ciencias Tecnología Ingeniería Matemáticas TIC y programación MINDSTORMS MINDSTORMS Education es un recurso ideal para el programa curricular. Los estudiantes
JABRA EVOLVE 65. Manual de instrucciones. jabra.com/evolve65
 Manual de instrucciones jabra.com/evolve65 2014 GN Netcom A/S/ GN Netcom US, Inc. Todos los derechos reservados. Jabra es una marca registrada de GN Netcom A/S. Todas las demás marcas comerciales incluidas
Manual de instrucciones jabra.com/evolve65 2014 GN Netcom A/S/ GN Netcom US, Inc. Todos los derechos reservados. Jabra es una marca registrada de GN Netcom A/S. Todas las demás marcas comerciales incluidas
MANUAL DE USUARIO. 2.4G 4-zonas RGB(W) Controlador de Luces Tiras Led
 Controlador de Luces Tiras Led") MANUAL DE USUARIO 2.4G 4-zonas RGB(W) Controlador de Luces Tiras Led En este manual encontrará todo lo necesario para utilizar correctamente el Controlador RGB 4- zonas y el Controlador RGBW 4-zonas. Por
MANUAL DE USUARIO 2.4G 4-zonas RGB(W) Controlador de Luces Tiras Led En este manual encontrará todo lo necesario para utilizar correctamente el Controlador RGB 4- zonas y el Controlador RGBW 4-zonas. Por
Reemplazo Nvidia Escudo Tablet K1 Puerto micro USB
 Reemplazo Nvidia Escudo Tablet K1 Puerto micro USB Esta es una guía para la retirada y sustitución del puerto micro USB. Escrito por: Ryan Butler INTRODUCCIÓN El puerto USB Micro es para cargar la tableta.
Reemplazo Nvidia Escudo Tablet K1 Puerto micro USB Esta es una guía para la retirada y sustitución del puerto micro USB. Escrito por: Ryan Butler INTRODUCCIÓN El puerto USB Micro es para cargar la tableta.
JABRA STEALTH UC. Manual de Usuario. jabra.com/stealthuc
 Manual de Usuario jabra.com/stealthuc 2015 GN Netcom A/S. Todos los derechos reservados. Jabra es una marca registrada de GN Netcom A/S. Todas las otras marcas comerciales incluidas en este documento son
Manual de Usuario jabra.com/stealthuc 2015 GN Netcom A/S. Todos los derechos reservados. Jabra es una marca registrada de GN Netcom A/S. Todas las otras marcas comerciales incluidas en este documento son
Programando el robot Lego Mindstorms NXT 2.0 con Java LeJOS
 Programando el robot Lego Mindstorms NXT 2.0 con Java LeJOS Lina Ernestina Arias Hernández a, Valeria Rubí Hernández Cisneros a y Luis Orlando Aguirre Fuentes a a Instituto Tecnologico de la Laguna., elearias@hotmail.com,
Programando el robot Lego Mindstorms NXT 2.0 con Java LeJOS Lina Ernestina Arias Hernández a, Valeria Rubí Hernández Cisneros a y Luis Orlando Aguirre Fuentes a a Instituto Tecnologico de la Laguna., elearias@hotmail.com,
JABRA STEALTH UC. Manual de instrucciones. jabra.com/stealthuc
 Manual de instrucciones jabra.com/stealthuc 2015 GN Netcom A/S. Todos los derechos reservados. Jabra es una marca registrada de GN Netcom A/S. Todas las demás marcas comerciales incluidas aquí son propiedad
Manual de instrucciones jabra.com/stealthuc 2015 GN Netcom A/S. Todos los derechos reservados. Jabra es una marca registrada de GN Netcom A/S. Todas las demás marcas comerciales incluidas aquí son propiedad
1 Desembale el proyector
 PowerLite 400W Guía de instalación Por favor lea esta guía antes de utilizar el producto. 1 Desembale el proyector Confirme que tiene los siguientes artículos: Proyector y tapa de la lente Cable de alimentación
PowerLite 400W Guía de instalación Por favor lea esta guía antes de utilizar el producto. 1 Desembale el proyector Confirme que tiene los siguientes artículos: Proyector y tapa de la lente Cable de alimentación
GUÍA RÁPIDA SOLUCIÓN DIGITAL INTEGRAL. CONSEJERÍA DE EDUCACIÓN Agencia Pública Andaluza de Educación y Formación Servicio Integral de Atención Digital
 GUÍA RÁPIDA SOLUCIÓN DIGITAL INTEGRAL CONSEJERÍA DE EDUCACIÓN Agencia Pública Andaluza de Educación y Formación Servicio Integral de Atención Digital Índice de contenido 1. Introducción... 3 2. Primeros
GUÍA RÁPIDA SOLUCIÓN DIGITAL INTEGRAL CONSEJERÍA DE EDUCACIÓN Agencia Pública Andaluza de Educación y Formación Servicio Integral de Atención Digital Índice de contenido 1. Introducción... 3 2. Primeros
2.1 Módulo de control de movimiento y posicionado del domo.
 2.- Descripción del sistema. Para mover y posicionar el domo, desde la interfaz de usuario se hace uso de un programa denominado interfaz gráfica del domo y un módulo control de movimiento y posicionado
2.- Descripción del sistema. Para mover y posicionar el domo, desde la interfaz de usuario se hace uso de un programa denominado interfaz gráfica del domo y un módulo control de movimiento y posicionado
MANUAL DE USO DE LA LAMPARA DE LUZ CONTINUA DE LED s SL100-W
 MANUAL DE USO DE LA LAMPARA DE LUZ CONTINUA DE LED s SL100-W Introducción: Gracias por adquirir este producto Godox! Las luces de vídeo Serie SL son excelentes para el rodaje de videos comerciales de producto,
MANUAL DE USO DE LA LAMPARA DE LUZ CONTINUA DE LED s SL100-W Introducción: Gracias por adquirir este producto Godox! Las luces de vídeo Serie SL son excelentes para el rodaje de videos comerciales de producto,
Sony NEX-7 reemplazo de la pantalla
 Sony NEX-7 reemplazo de la pantalla Si la pantalla de su cámara está roto o no funcionamiento, esta guía le mostrará cómo se puede reemplazar la pantalla. Escrito por: Jay Miley INTRODUCCIÓN Esta guía
Sony NEX-7 reemplazo de la pantalla Si la pantalla de su cámara está roto o no funcionamiento, esta guía le mostrará cómo se puede reemplazar la pantalla. Escrito por: Jay Miley INTRODUCCIÓN Esta guía
Taller de introducción a la robótica con el robot HKTR-9000
 Taller de introducción a la robótica con el robot HKTR-9000 En Mayo de 2012, Lucas Polo López, Miguel Gargallo Vázquez y Carlos García Saura organizamos desde el Club de Robótica y Mecatrónica un taller
Taller de introducción a la robótica con el robot HKTR-9000 En Mayo de 2012, Lucas Polo López, Miguel Gargallo Vázquez y Carlos García Saura organizamos desde el Club de Robótica y Mecatrónica un taller
Audio ::: Primeros pasos con Audacity Diseño de materiales multimedia. Web 2.0. 3.2 Primeros pasos con Audacity
 242 3.2 Primeros pasos con Audacity 243 3.2 Primeros pasos con Audacity 3.2.1 Qué es Audacity? Es un programa libre y de código abierto para grabar y editar sonidos. Existe versiones para Windows, Linux,
242 3.2 Primeros pasos con Audacity 243 3.2 Primeros pasos con Audacity 3.2.1 Qué es Audacity? Es un programa libre y de código abierto para grabar y editar sonidos. Existe versiones para Windows, Linux,
Control remoto móvil HP (sólo en algunos modelos) Guía del usuario
 Guía del usuario") Control remoto móvil HP (sólo en algunos modelos) Guía del usuario Copyright 2008 Hewlett-Packard Development Company, L.P. Windows y Windows Vista son marcas comerciales o marcas registradas de Microsoft
Control remoto móvil HP (sólo en algunos modelos) Guía del usuario Copyright 2008 Hewlett-Packard Development Company, L.P. Windows y Windows Vista son marcas comerciales o marcas registradas de Microsoft
Su control remoto tiene 4 botones:
 JA-950P / 956 Su control remoto tiene 4 botones: Botón 1: Botón con la figura Botón 2: Botón con la figura Botón 3: Botón con la figura Botón 4: Botón con figura Esta alarma puede memorizar hasta 4 controles
JA-950P / 956 Su control remoto tiene 4 botones: Botón 1: Botón con la figura Botón 2: Botón con la figura Botón 3: Botón con la figura Botón 4: Botón con figura Esta alarma puede memorizar hasta 4 controles
Área de Educación Tecnológica Tecnología de los Procesos Productivos II 3 Año. Cuadernillo Nº3. Programación de sistemas. LEGO MINDSTORMS NXT
 Área de Educación Tecnológica Tecnología de los Procesos Productivos II 3 Año Cuadernillo Nº3 Programación de sistemas. LEGO MINDSTORMS NXT Alumno: Curso: Año: 2011 TPP II Cuadernillo Nº 3 Pág. 1/19 PAUTAS
Área de Educación Tecnológica Tecnología de los Procesos Productivos II 3 Año Cuadernillo Nº3 Programación de sistemas. LEGO MINDSTORMS NXT Alumno: Curso: Año: 2011 TPP II Cuadernillo Nº 3 Pág. 1/19 PAUTAS
Pedro Redondo Jonás Talavera César Reneses
 Pedro Redondo Jonás Talavera César Reneses AGENDA Que es todo esto? De donde venimos y a donde vamos Lego MindStorm NXT Microsoft Robotic Developer Studio NXT Sharp y MindSquals QUE ES TODO ESTO? DE DONDE
Pedro Redondo Jonás Talavera César Reneses AGENDA Que es todo esto? De donde venimos y a donde vamos Lego MindStorm NXT Microsoft Robotic Developer Studio NXT Sharp y MindSquals QUE ES TODO ESTO? DE DONDE
Práctica 14 Movimiento del robot Fanuc M16i usando el método JOINT
 Práctica 14 Movimiento del robot Fanuc M16i usando el método JOINT Objetivo Conocimiento sobre el robot FANUC M16i e interactuar con él, por medio del método de movimiento JOINT. Preguntas detonantes 1)
Práctica 14 Movimiento del robot Fanuc M16i usando el método JOINT Objetivo Conocimiento sobre el robot FANUC M16i e interactuar con él, por medio del método de movimiento JOINT. Preguntas detonantes 1)
ADW-350. Sistema de seguridad inalámbrico digital Guía de inicio rápido. Bienvenido! Comencemos. QH_350KIT110214S Swann 2014
 ES ADW-350 Sistema de seguridad inalámbrico digital Guía de inicio rápido Bienvenido! Comencemos. QH_350KIT110214S Swann 2014 1 1 Conociendo el monitor y la cámara Felicitaciones por la compra de su Sistema
ES ADW-350 Sistema de seguridad inalámbrico digital Guía de inicio rápido Bienvenido! Comencemos. QH_350KIT110214S Swann 2014 1 1 Conociendo el monitor y la cámara Felicitaciones por la compra de su Sistema
Con indicación de voz en español. 8cm. 5cm. Con indicación de voz en español MANUAL DEL USUARIO
 8cm Con indicación de voz en español 5cm Con indicación de voz en español MANUAL DEL USUARIO OBSERVACIONES CONTENIDO 1. Mantener el motor apagado antes de instalar el sistema sensor de estacionamiento.
8cm Con indicación de voz en español 5cm Con indicación de voz en español MANUAL DEL USUARIO OBSERVACIONES CONTENIDO 1. Mantener el motor apagado antes de instalar el sistema sensor de estacionamiento.
h Cable de alimentación h Unidad de disquetes Nota: Algunos modelos pueden incluir elementos adicionales que no aparecen en la lista.
 Número de pieza: 46P4549 Gracias por adquirir el sistema IBM ThinkPad T Series. Utilice esta lista para comprobar los elementos incluidos en la caja. Si alguno falta o está dañado, contacte con el establecimiento
Número de pieza: 46P4549 Gracias por adquirir el sistema IBM ThinkPad T Series. Utilice esta lista para comprobar los elementos incluidos en la caja. Si alguno falta o está dañado, contacte con el establecimiento
Pulsera Fitness SB01
 Pulsera Fitness SB01 Pulsera Fitness SB01 MANUAL DE USUARIO Por favor, asegúrese de leer cuidadosamente las instrucciones antes del uso y de guardarlas apropiadamente. Gracias por elegir la Pulsera Fitness
Pulsera Fitness SB01 Pulsera Fitness SB01 MANUAL DE USUARIO Por favor, asegúrese de leer cuidadosamente las instrucciones antes del uso y de guardarlas apropiadamente. Gracias por elegir la Pulsera Fitness
LAMPARA DE LEDS PARA USO EN DENTAL : GABINETE-QUIRÓFANO. Modelo: KY-P103 MANUAL DE USO
 LAMPARA DE LEDS PARA USO EN DENTAL : GABINETE-QUIRÓFANO Modelo: KY-P106 KY-P103 MANUAL DE USO Introducción Leer este manual con atención antes de usar la unidad y guardarlo para usos sucesivos. Seguir
LAMPARA DE LEDS PARA USO EN DENTAL : GABINETE-QUIRÓFANO Modelo: KY-P106 KY-P103 MANUAL DE USO Introducción Leer este manual con atención antes de usar la unidad y guardarlo para usos sucesivos. Seguir
MEDIDOR DE MONOXIDO DE CARBONO
 INTRUCCIONES OPERACIONALES MEDIDOR DE MONOXIDO DE CARBONO ESPECIFICACIONES GENERALES Pantalla: Pantalla de cristal líquido (LCD) de 3 ½ dígitos con una lectura máxima de 1999 Indicador de baja batería:
INTRUCCIONES OPERACIONALES MEDIDOR DE MONOXIDO DE CARBONO ESPECIFICACIONES GENERALES Pantalla: Pantalla de cristal líquido (LCD) de 3 ½ dígitos con una lectura máxima de 1999 Indicador de baja batería:
Actuadores eléctricos - Motores
 Servomotores Un servomotor es básicamente un actuador mecánico que contine un motor eléctrico y un conjunto de engranajes que permiten multiplicar el torque del sistema final y tiene la capacidad de ser
Servomotores Un servomotor es básicamente un actuador mecánico que contine un motor eléctrico y un conjunto de engranajes que permiten multiplicar el torque del sistema final y tiene la capacidad de ser
MANUAL DE USUARIO DR001
 MANUAL DE USUARIO DR001 DR001 MANUAL DE USUARIO Por favor, asegúrese de leer cuidadosamente las instrucciones antes del uso y de guardarlas apropiadamente. 01. CONTROLES Estabilizar Izquierda / Derecha
MANUAL DE USUARIO DR001 DR001 MANUAL DE USUARIO Por favor, asegúrese de leer cuidadosamente las instrucciones antes del uso y de guardarlas apropiadamente. 01. CONTROLES Estabilizar Izquierda / Derecha
RECOPILACIÓN DE PROBLEMAS DE EXÁMENES 1. PALANCAS. Fuerza
 RECOPILACIÓN DE PROBLEMAS DE EXÁMENES MECANISMOS PÁGINA 1 RECOPILACIÓN DE PROBLEMAS DE EXÁMENES 1. PALANCAS Fuerza 1.1.- La piedra del dibujo pesa 160 kg. Calcular la fuerza que hay que aplicar en el extremo
RECOPILACIÓN DE PROBLEMAS DE EXÁMENES MECANISMOS PÁGINA 1 RECOPILACIÓN DE PROBLEMAS DE EXÁMENES 1. PALANCAS Fuerza 1.1.- La piedra del dibujo pesa 160 kg. Calcular la fuerza que hay que aplicar en el extremo
Manual de instrucciones de uso PCE-SMT 3 Localizador 3 en 1 para conductos de Madera/ Metal / Voltaje AC Con nivel de línea láser
 C/ Mayor, 53 - Bajo 02500 Tobarra Albacete-España Tel. : +34 967 543 548 Fax: +34 967 543 542 info@pce-iberica.es Manual de instrucciones de uso PCE-SMT 3 Localizador 3 en 1 para conductos de Madera/ Metal
C/ Mayor, 53 - Bajo 02500 Tobarra Albacete-España Tel. : +34 967 543 548 Fax: +34 967 543 542 info@pce-iberica.es Manual de instrucciones de uso PCE-SMT 3 Localizador 3 en 1 para conductos de Madera/ Metal
Adaptador de Torque Digital. Art. 90714 710 200
 Adaptador de Torque Digital Art. 90714 710 200 Queridos usuarios: Gracias por preferir nuestro adaptador de torque digital. Este manual les ayudara conocer las características del producto. Antes de usar,
Adaptador de Torque Digital Art. 90714 710 200 Queridos usuarios: Gracias por preferir nuestro adaptador de torque digital. Este manual les ayudara conocer las características del producto. Antes de usar,
Lenovo Essential G580 Procesador + actualización de la memoria / Ram
 Lenovo Essential G580 Procesador + actualización de la memoria / Ram Es el esencial del ordenador portátil de la serie G de Lenovo En la necesidad de un procesador y / o Actualización de memoria? Si lo
Lenovo Essential G580 Procesador + actualización de la memoria / Ram Es el esencial del ordenador portátil de la serie G de Lenovo En la necesidad de un procesador y / o Actualización de memoria? Si lo
Robótica. Un robot...
 Robótica Un robot... La palabra robot está a la orden del día y muchas veces al escucharla nos imaginamos una máquina con forma humana que camina, habla, gesticula pero en realidad es algo mucho más sencillo.
Robótica Un robot... La palabra robot está a la orden del día y muchas veces al escucharla nos imaginamos una máquina con forma humana que camina, habla, gesticula pero en realidad es algo mucho más sencillo.
NVR-917HC CINE EN CASA INSTRUCCIONES
 NVR-917HC - 5.1 CINE EN CASA INSTRUCCIONES EQUIPAMIENTOS DE SEGURIDAD IMPORTANTES LEA LAS INSTRUCCIONES - Debe leer todas las instrucciones de seguridad y funcionamiento antes de poner la mesa de quirófano.
NVR-917HC - 5.1 CINE EN CASA INSTRUCCIONES EQUIPAMIENTOS DE SEGURIDAD IMPORTANTES LEA LAS INSTRUCCIONES - Debe leer todas las instrucciones de seguridad y funcionamiento antes de poner la mesa de quirófano.
Robots para todos con Picaxe (I) El MED1 Picaxe Walker
 El MED1 Picaxe Walker") Robots para todos con Picaxe (I) El MED1 Picaxe Walker Antes de nada quiero expresar mi gratitud a Revolution Education en el Reino Unido por un producto de excelencia. No soy experto en este campo, pero
Robots para todos con Picaxe (I) El MED1 Picaxe Walker Antes de nada quiero expresar mi gratitud a Revolution Education en el Reino Unido por un producto de excelencia. No soy experto en este campo, pero
clima (IP68) y de los programadores de modelo S: DC-1S, DC-4S, DC-6S. Operación manual de 1 a 4 válvulas, mas la válvula maestra.
 y de los programadores de modelo S: DC-1S, DC-4S, DC-6S. Operación manual de 1 a 4 válvulas, mas la válvula maestra.") y de los programadores de modelo S: DC-1S, DC-4S, DC-6S. clima (IP68) Operación manual de 1 a 4 válvulas, mas la válvula maestra. a través del Servicio y garantia de Galcon. Conexión Programación del programador
y de los programadores de modelo S: DC-1S, DC-4S, DC-6S. clima (IP68) Operación manual de 1 a 4 válvulas, mas la válvula maestra. a través del Servicio y garantia de Galcon. Conexión Programación del programador
Secuencia de inicio rápido > NXT. Materiales 1 cubo NXT, 1 batería, 1 cargador de batería, 6 pilas AA, 1 toma eléctrica disponible
 Secuencia de inicio rápido > NXT 1 cubo NXT, 1 batería, 1 cargador de batería, 6 pilas AA, 1 toma eléctrica disponible Cargar la batería 1. Localiza la batería y el cargador 2. Enchufa el cargador de la
Secuencia de inicio rápido > NXT 1 cubo NXT, 1 batería, 1 cargador de batería, 6 pilas AA, 1 toma eléctrica disponible Cargar la batería 1. Localiza la batería y el cargador 2. Enchufa el cargador de la
Experiencia piloto de Robótica y Lego
 Experiencia piloto de Robótica y Lego Lic. Alicia Paniagua (Lic. Psicología, Prof. de Informática) Jornadas Internacionales TECTEA El mejor tipo de terapia es cuando el niño está tan divertido que no sabe
Experiencia piloto de Robótica y Lego Lic. Alicia Paniagua (Lic. Psicología, Prof. de Informática) Jornadas Internacionales TECTEA El mejor tipo de terapia es cuando el niño está tan divertido que no sabe
CVRPS14WI. Sistema de Sensores con Superposición Gráfica. Manual de Instalación y Operación
 CVRPS14WI Sistema de Sensores con Superposición Gráfica Manual de Instalación y Operación Índice de Contenidos: Manual de Instalación...Página x a x Manual de Operación...Página x a x Lista de Componentes:
CVRPS14WI Sistema de Sensores con Superposición Gráfica Manual de Instalación y Operación Índice de Contenidos: Manual de Instalación...Página x a x Manual de Operación...Página x a x Lista de Componentes:
ELECTROFON SISTEMA DE VIDEO PORTERO COLOR MANOS LIBRES CON PANTALLA LCD DE 7. Manual de Instalación y Uso
 ELECTROFON SISTEMA DE VIDEO PORTERO COLOR MANOS LIBRES CON PANTALLA LCD DE 7 Mod. : VPC-2010 Manual de Instalación y Uso Contenido Características Panel Exterior Monitor Instalación Diagramas de Conexión
ELECTROFON SISTEMA DE VIDEO PORTERO COLOR MANOS LIBRES CON PANTALLA LCD DE 7 Mod. : VPC-2010 Manual de Instalación y Uso Contenido Características Panel Exterior Monitor Instalación Diagramas de Conexión
Reemplazo de Logitech G27 Optical Encoder
 Reemplazo de Logitech G27 Optical Encoder Esta guía explicará todos los pasos necesarios para reemplazar el codificador óptico en el volante de carreras Logitech G27. Escrito por: Grant Blake INTRODUCCIÓN
Reemplazo de Logitech G27 Optical Encoder Esta guía explicará todos los pasos necesarios para reemplazar el codificador óptico en el volante de carreras Logitech G27. Escrito por: Grant Blake INTRODUCCIÓN
Guía rápida del teléfono digital ES, edición 1, junio de 2004
 Guía rápida del teléfono digital 240 6-30034ES, edición, junio de 2004 2 3 8 4 5 6 7 7 6 8 5 4 3 2 9 0 Botones de la línea de llamada y de función: para obtener acceso a las llamadas entrantes/salientes
Guía rápida del teléfono digital 240 6-30034ES, edición, junio de 2004 2 3 8 4 5 6 7 7 6 8 5 4 3 2 9 0 Botones de la línea de llamada y de función: para obtener acceso a las llamadas entrantes/salientes
Español SPBT1040. Manual
 Español SPBT1040 Manual Para funcionar correctamente, por favor, lea este manual cuidadosamente antes de using.any revisar el contenido del manual no declarará de nuevo, y nosotros no somos responsables
Español SPBT1040 Manual Para funcionar correctamente, por favor, lea este manual cuidadosamente antes de using.any revisar el contenido del manual no declarará de nuevo, y nosotros no somos responsables
Instrucciones para enhebrar OVERLOCK 1034D OVERLOCK 1034D. Diseño Gráfico: Gabriela Del Pino
 Instrucciones para enhebrar OVERLOCK 1034D OVERLOCK 1034D Diseño Gráfico: Gabriela Del Pino manualfileteadorapdf.indd 1 10/29/2013 3:18:28 PM overlock 1034D Una costura tipo overlock se realiza sobre el
Instrucciones para enhebrar OVERLOCK 1034D OVERLOCK 1034D Diseño Gráfico: Gabriela Del Pino manualfileteadorapdf.indd 1 10/29/2013 3:18:28 PM overlock 1034D Una costura tipo overlock se realiza sobre el
QUE ES LA LUZ INFRARROJA?
 QUE ES LA LUZ INFRARROJA? La luz infrarroja es un tipo de luz que oscila a una frecuencia distinta a lo que la hace la luz normal, por lo que el ojo humano no es capaz de verla o percibirla. El ojo humano
QUE ES LA LUZ INFRARROJA? La luz infrarroja es un tipo de luz que oscila a una frecuencia distinta a lo que la hace la luz normal, por lo que el ojo humano no es capaz de verla o percibirla. El ojo humano
SEA: Bloque I: INSTRUMENTACIÓN APLICACIÓN SENSORES
 SEA: Bloque I: INSTRUMENTACIÓN APLICACIÓN SENSORES Autores: Guillermo Cubero Valera José Gregorio Garre Martínez Rafael Rico Limorti Cristina Lucia Ibeas González Iban Martínez Echevarría Sonia Sánchez
SEA: Bloque I: INSTRUMENTACIÓN APLICACIÓN SENSORES Autores: Guillermo Cubero Valera José Gregorio Garre Martínez Rafael Rico Limorti Cristina Lucia Ibeas González Iban Martínez Echevarría Sonia Sánchez
JABRA move Wireless. Manual de instrucciones. jabra.com/movewireless
 JABRA move Wireless Manual de instrucciones jabra.com/movewireless 1. Bienvenido...3 2. contenido de la caja... 4 3. cómo se coloca...5 3.1 Cómo ajustar la altura 4. cómo se carga... 6 4.1 Estado de la
JABRA move Wireless Manual de instrucciones jabra.com/movewireless 1. Bienvenido...3 2. contenido de la caja... 4 3. cómo se coloca...5 3.1 Cómo ajustar la altura 4. cómo se carga... 6 4.1 Estado de la
Construyendo Nuestro Boe-Bot
 Construyendo Nuestro Boe-Bot Qué contiene nuestro kit? Nuestro kit cuenta con todas las piezas requeridas para armar nuestro primer robot, con este robot aprenderemos distintos conceptos de programación
Construyendo Nuestro Boe-Bot Qué contiene nuestro kit? Nuestro kit cuenta con todas las piezas requeridas para armar nuestro primer robot, con este robot aprenderemos distintos conceptos de programación
RECEPTOR DE AUDIO BLUETOOTH
 RECEPTOR DE AUDIO BLUETOOTH Manual de Usuario DA-30500 Índice 1.0 Introducción... 2 2.0 Especificaciones... 3 3.0 Contenido del Embalaje... 3 4.0 Descripciones del panel... 4 5.0 Conexión y operación...
RECEPTOR DE AUDIO BLUETOOTH Manual de Usuario DA-30500 Índice 1.0 Introducción... 2 2.0 Especificaciones... 3 3.0 Contenido del Embalaje... 3 4.0 Descripciones del panel... 4 5.0 Conexión y operación...
QUÉ ES MBOT? Conectores RJ25
 1 QUÉ ES MBOT? mbot es el kit educativo, ideal para niños y centros de enseñanza, para iniciarse en robótica, programación y electrónica. Está basado en Arduino y Scratch (dos conocidos hardware y software
1 QUÉ ES MBOT? mbot es el kit educativo, ideal para niños y centros de enseñanza, para iniciarse en robótica, programación y electrónica. Está basado en Arduino y Scratch (dos conocidos hardware y software
Lego Mindstorms NXT Curso de NXT-G 4º ESO, IES Antonio Machado. Dr. Salustiano Nievas Juan Antonio Breña Moral
 Lego Mindstorms NXT Curso de NXT-G 4º ESO, IES Antonio Machado Dr. Salustiano Nievas Juan Antonio Breña Moral Índice 1. Introducción 2. Objetivos del curso 3. Métodos didácticos 4. Competencias básicas
Lego Mindstorms NXT Curso de NXT-G 4º ESO, IES Antonio Machado Dr. Salustiano Nievas Juan Antonio Breña Moral Índice 1. Introducción 2. Objetivos del curso 3. Métodos didácticos 4. Competencias básicas
Manual del usuario. Identificdor inalámbrico de circuitos CA. ModelosRT32
 Manual del usuario Identificdor inalámbrico de circuitos CA ModelosRT32 Introducción Agradecemos su compra del identificador inalámbrico de circuitos CA de Extech RT32 (869MHz). El detector puede identificar
Manual del usuario Identificdor inalámbrico de circuitos CA ModelosRT32 Introducción Agradecemos su compra del identificador inalámbrico de circuitos CA de Extech RT32 (869MHz). El detector puede identificar
Importante Información de Seguridad. Para evitar daños o peligro inesperados, por favor lea esta información antes de instalar o reparar el teléfono.
 Importante Información de Seguridad Para evitar daños o peligro inesperados, por favor lea esta información antes de instalar o reparar el teléfono. 3 Importante Información de Seguridad 4 Importante Información
Importante Información de Seguridad Para evitar daños o peligro inesperados, por favor lea esta información antes de instalar o reparar el teléfono. 3 Importante Información de Seguridad 4 Importante Información
Importador: ARGENTRADE S.R.L. CALLE 514 NO. 2050, (1901) RINGUELET LA PLATA, BUENOS AIRES, ARGENTINA
 RINGUELET LA PLATA, BUENOS AIRES, ARGENTINA") Importador: ARGENTRADE S.R.L. CALLE 514 NO. 2050, (1901) RINGUELET LA PLATA, BUENOS AIRES, ARGENTINA Nº de Importador : 22582/6-1 Cuit No.: 30-66010157-4 ATENCIÓN: Por favor, asegúrese de observar estrictamente
Importador: ARGENTRADE S.R.L. CALLE 514 NO. 2050, (1901) RINGUELET LA PLATA, BUENOS AIRES, ARGENTINA Nº de Importador : 22582/6-1 Cuit No.: 30-66010157-4 ATENCIÓN: Por favor, asegúrese de observar estrictamente
IRISPen Air 7. Guía rápida del usuario. (ios)
") IRISPen Air 7 Guía rápida del usuario (ios) Esta Guía rápida del usuario le ayudará a empezar a utilizar el IRISPen TM Air 7. Le recomendamos que la lea antes de utilizar el escáner y el software. Toda
IRISPen Air 7 Guía rápida del usuario (ios) Esta Guía rápida del usuario le ayudará a empezar a utilizar el IRISPen TM Air 7. Le recomendamos que la lea antes de utilizar el escáner y el software. Toda
VENTILADOR DE TECHO INSTRUCCIONES DE INSTALACION LEA Y GUARDE ESTE MANUAL PARA CONSULTA FUTURA
 MODELO NO.: DCF52P-4C4L DESCRIPCIÓN: VENTILADOR DE TECHO MARCA: MAINSTAYS, GRAND MERIT LIMITED IMPORTADOR: COMERCIALIZADORA MEXICO AMERICANA S. DE R.L. DE C.V. NEXTENGO NO. 78 COL. SANTA CRUZ ACAYUCAN
MODELO NO.: DCF52P-4C4L DESCRIPCIÓN: VENTILADOR DE TECHO MARCA: MAINSTAYS, GRAND MERIT LIMITED IMPORTADOR: COMERCIALIZADORA MEXICO AMERICANA S. DE R.L. DE C.V. NEXTENGO NO. 78 COL. SANTA CRUZ ACAYUCAN
Advertencia antes de la instalación. Compruebe el contenido del embalaje ES - 46
 510000211G Advertencia antes de la instalación Apague la cámara de red si aparece humo o algún olor no habitual. No coloque la cámara para conexión en red junto a fuentes de calor, como por ejemplo televisores
510000211G Advertencia antes de la instalación Apague la cámara de red si aparece humo o algún olor no habitual. No coloque la cámara para conexión en red junto a fuentes de calor, como por ejemplo televisores
Procesador del habla corporal Nucleus Freedom Guía rápida de uso
 Procesador del habla corporal Nucleus Freedom Guía rápida de uso Procesador del habla corporal Nucleus Freedom Guía rápida de uso Bobina Unidad de procesamiento Luz indicadora Imán Codo Conexión para accesorios
Procesador del habla corporal Nucleus Freedom Guía rápida de uso Procesador del habla corporal Nucleus Freedom Guía rápida de uso Bobina Unidad de procesamiento Luz indicadora Imán Codo Conexión para accesorios
Se necesita algo que encienda una ampolleta, interruptor o controlador. Se necesita que la ampolleta se encienda y se apague.
 Sesión 2: Uso de variables simples para generación de animaciones. Objetivo: Identificar tipos de variables simples que permiten movimientos, en soluciones a problemas simples que se puedan representar
Sesión 2: Uso de variables simples para generación de animaciones. Objetivo: Identificar tipos de variables simples que permiten movimientos, en soluciones a problemas simples que se puedan representar
MANUAL DE LA MÁQUINA DE MICROFICHAS Y MICROFILMS
 MANUAL DE LA MÁQUINA DE MICROFICHAS Y MICROFILMS PRINCIPALES PARTES DE LA MÁQUINA Pantalla Panel de control Teclas para ajustar la imagen o seleccionar el modo de la película Soporte de la lente intercambiable
MANUAL DE LA MÁQUINA DE MICROFICHAS Y MICROFILMS PRINCIPALES PARTES DE LA MÁQUINA Pantalla Panel de control Teclas para ajustar la imagen o seleccionar el modo de la película Soporte de la lente intercambiable
MANUAL PCE-MM200.
 www.pce-iberica.es C/ Mayor, 53 - Bajo 02500 Tobarra Albacete-España Tel. : +34 967 543 548 Fax: +34 967 543 542 info@pce-iberica.es www.pce-iberica.es MANUAL PCE-MM200 Introducción Gracias por elegir
www.pce-iberica.es C/ Mayor, 53 - Bajo 02500 Tobarra Albacete-España Tel. : +34 967 543 548 Fax: +34 967 543 542 info@pce-iberica.es www.pce-iberica.es MANUAL PCE-MM200 Introducción Gracias por elegir
WRO Costa Rica Categoría B. Clasificación de residuos
 WRO Costa Rica Categoría B Clasificación de residuos WRO Costa Rica 2016 - Categoría B - 1 Introducción El reto consiste en hacer un robot que recoja ciertos tipos de residuos reciclables de un hogar y
WRO Costa Rica Categoría B Clasificación de residuos WRO Costa Rica 2016 - Categoría B - 1 Introducción El reto consiste en hacer un robot que recoja ciertos tipos de residuos reciclables de un hogar y
SUPER CONTROLADOR DE SERVOS S310175
 SUPER CONTROLADOR DE SERVOS S310175 Controlador para servos con retroalimentación del par motor No es necesario realizar modificaciones a los servos Características: Sus ocho salidas independientes de
SUPER CONTROLADOR DE SERVOS S310175 Controlador para servos con retroalimentación del par motor No es necesario realizar modificaciones a los servos Características: Sus ocho salidas independientes de
MANUAL DE INSTALACIÓN, CONFIGURACIÓN Y USO TABLETS INTEL FLAG MILL V2
 MANUAL DE INSTALACIÓN, CONFIGURACIÓN Y USO TABLETS INTEL FLAG MILL V2 Contenido Contenido del Paquete Características Técnicas Partes Tablet Carga de Batería Encendido de la Tablet Pantalla Presentación
MANUAL DE INSTALACIÓN, CONFIGURACIÓN Y USO TABLETS INTEL FLAG MILL V2 Contenido Contenido del Paquete Características Técnicas Partes Tablet Carga de Batería Encendido de la Tablet Pantalla Presentación
OPERACIONES BASICAS CON LOS ICONOS ( ABRIR, CREAR, ELIMINAR, ORGANIZAR)
") OPERACIONES BASICAS CON LOS ICONOS ( ABRIR, CREAR, ELIMINAR, ORGANIZAR) La mayoría de los sistemas operativos con interfaz gráfica tienen en la partida un aspecto similar al de un escritorio, con elementos
OPERACIONES BASICAS CON LOS ICONOS ( ABRIR, CREAR, ELIMINAR, ORGANIZAR) La mayoría de los sistemas operativos con interfaz gráfica tienen en la partida un aspecto similar al de un escritorio, con elementos
Guía de inicio rápido. Modelos: BLE6516RTUI BLE6516RTUIUY BLE6516RTUIPE BLE6516RTUICL
 Guía de inicio rápido Modelos: BLE6516RTUI BLE6516RTUIUY BLE6516RTUIPE BLE6516RTUICL Contenido Led TV sin base x1 Base x 2 Soporte de pared x4 M5 x 12mm x4 M3 x 6mm x16 Control remoto x2 Guía rápida x1
Guía de inicio rápido Modelos: BLE6516RTUI BLE6516RTUIUY BLE6516RTUIPE BLE6516RTUICL Contenido Led TV sin base x1 Base x 2 Soporte de pared x4 M5 x 12mm x4 M3 x 6mm x16 Control remoto x2 Guía rápida x1
3º ESO - Ejercicios de mecanismos HOJA 1
 3º ESO - Ejercicios de mecanismos HOJA 1 1. Para sacar una muela hay que hacer una fuerza de 980 N. La dentista utiliza para ello unas tenazas que tienen un mango de 15 cm. La distancia entre el extremo
3º ESO - Ejercicios de mecanismos HOJA 1 1. Para sacar una muela hay que hacer una fuerza de 980 N. La dentista utiliza para ello unas tenazas que tienen un mango de 15 cm. La distancia entre el extremo
Mc-119. Manual del Usuario. 1
 Mc-119 Manual del Usuario www.bidcom.com.ar 1 Iniciación Inserte la memoria en el slot para Micro SD y la batería en su slot. Cargue la batería con el cable USB proporcionado conectándolo a una computadora
Mc-119 Manual del Usuario www.bidcom.com.ar 1 Iniciación Inserte la memoria en el slot para Micro SD y la batería en su slot. Cargue la batería con el cable USB proporcionado conectándolo a una computadora
2. Esta guía sirve para que los usuarios puedan conocer y familiarizarse con nuestro producto tan pronto como sea posible.
 Manual de usuario 1 Introducción 1. Gracias por elegir la nueva Novus Pad Windows. 2. Esta guía sirve para que los usuarios puedan conocer y familiarizarse con nuestro producto tan pronto como sea posible.
Manual de usuario 1 Introducción 1. Gracias por elegir la nueva Novus Pad Windows. 2. Esta guía sirve para que los usuarios puedan conocer y familiarizarse con nuestro producto tan pronto como sea posible.