F3/Área de Arquitectura de Avión n y Estructuras
|
|
|
- María Ortiz de Zárate Fernández
- hace 6 años
- Vistas:
Transcripción





1 F3/Área de Arquitectura de Avión n y Estructuras F3.5-F3.6/Normas F3.6/Normas de Cálculo C Estructural (3). Envolvente de Maniobra Dra. Cristina Cuerno Rejado Dpto. Vehículos Aeroespaciales, E.T.S.I.A,, UPM cristina.cuerno@upm.es Madrid, de octubre de 2008
2 Cargas de Vuelo. CS General a) Los factores de carga de vuelo representan el cociente entre la componente aerodinámica normal y el peso. Signo positivo hacia el extradós. b) Hay que demostrar los requisitos de esta subparte (incluyendo compresibilidad) : W; h; distribución de carga ( W, h). c) Se deben investigar suficientes puntos de la envolvente de diseño para poder asegurar que se obtiene la carga más alta para cada elemento de la estructura. d) Las fuerzas significativas que actúan sobre el avión se deben equilibrar de forma conservativa. Las inercias en equilibrio con los empujes y fuerzas aerodinámicas; los momentos angulares (cabeceo) en equilibrio con momentos del empuje y aerodinámicos, incluyendo los debidos a cargas en cola o góndolas. 1
3 CS Envolvente de Maniobra. a) Los requisitos de resistencia se deben cumplir para cada combinación de velocidad y factor de carga dentro de los límites de la envolvente. Asimismo la envolvente sirve para determinar los límites estructurales operativos del avión. 2
4 CS Velocidades de proyecto. a) Velocidad de crucero de proyecto, V C : 1) V C suficientemente mayor que V B para prevenir de incrementos inadvertidos de velocidad debido a turbulencia atmosférica severa. 2) V C V B + 1,32 U ref (*). Sin embargo, V C no necesita ser mayor que la máxima velocidad en vuelo horizontal a potencia máxima continua a la altitud correspondiente. 3) A altitudes donde V D se limita por número de Mach, V C también. En general la velocidad de crucero de proyecto V C se selecciona de forma que envuelva a las velocidades operativas máximas deseadas y será entonces la velocidad mayor a la cual se puede operar el avión en un vuelo comercial. (*) siendo V B la velocidad para máxima intensidad de ráfagas de proyecto y U ref la velocidad de ráfagas de referencia que, a V C, vale 17,07 m/s (56 ft/s) a nivel del mar y disminuye linealmente hasta 13,41 m/s (44 ft/s) a ft y hasta 7,92 m/s (26 ft/s) a ft. 3
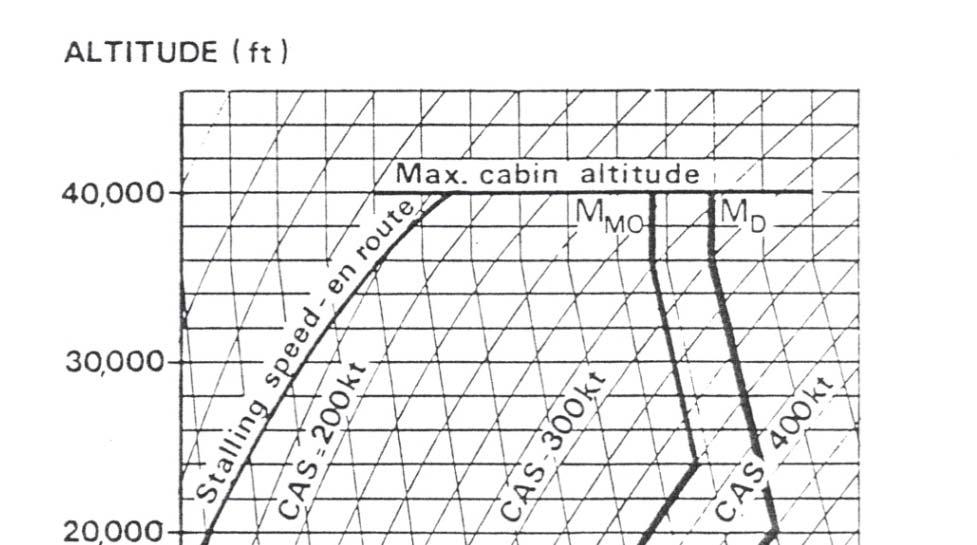
5 CS Velocidades de proyecto. b) Velocidad de picado de proyecto, V D : se debe seleccionar de forma que V C /M C no sea mayor que 0,8 V D /M D, o que el margen mínimo entre V C /M C y V D /M D sea el mayor de los siguientes valores: 1) A partir de una condición de vuelo estabilizado a V C /M C, hay que realizar una maniobra de picado durante 20 s y con un ángulo de 7,5º, y luego realizar un tirón a factor de carga 1,5g. El incremento de velocidad experimentado en la maniobra puede ser calculado si se dispone de datos aerodinámicos fiables o conservativos. La potencia se fija en su valor máximo de crucero (limitada por la necesaria a V MO /M MO ) y se debe mantener hasta que se inicia el tirón, en cuyo momento se asume que se reduce la misma y que el piloto utiliza los sistemas aerodinámicos de frenada. 2) Un margen mínimo para prevenir de variaciones atmosféricas (ráfagas horizontales, penetración en corrientes o frentes fríos), de errores de instrumento y variaciones en la fabricación de la célula. Estos factores se consideraran de manera estadística. El margen no será inferior a 0,07 M salvo que se demuestre que se puede determinar uno menor, mediante un análisis racional que incluya los efectos de cualquier sistema automático. En cualquier caso, el margen no será inferior a 0,05 M. En principio se desea que el margen debido al picado no sea ensayado en vuelo sino determinado por análisis. En la realidad se llevarán a cabo ensayos en vuelo incluyendo cabeceo, balance y guiñada de forma que se demuestre que el margen entre V C y V D es suficiente. 4
6 CS Velocidades de proyecto. b) Velocidad de picado de proyecto, V D (cont.): La ecuación para determinar el cambio de velocidad en un descenso prolongado es: dv dt [ sin( τ + ) T / W C / C ] 0 + = g τ req D L donde τ req =7,5º y τ 0 =ángulo de vuelo estabilizado en t=0. Para calcular C L tenemos que n z W=C L qs w y para C D, C D =f(c L,M). Según las normas, n z es igual a 1g para los primeros 20 s y después variará hasta alcanzar un factor de carga máximo de 1,5g, momento en el cual el empuje T se reducirá y los aerofrenos (si los hay) se desplegarán. 5
7 6
8 7
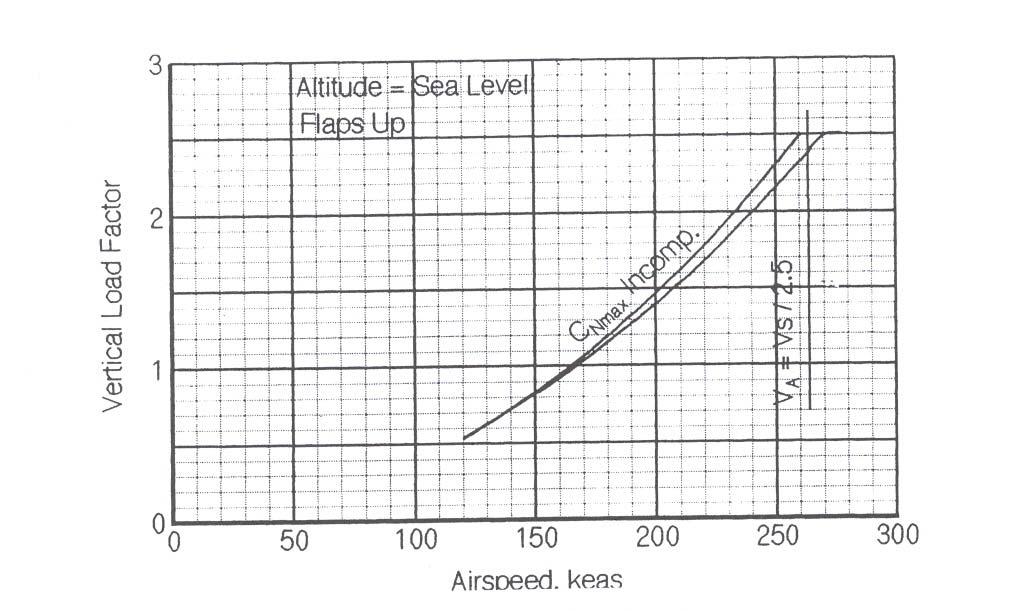
9 CS Velocidades de proyecto. c) Velocidad de maniobra de proyecto, V A : 1) V A V s1 n, siendo n el factor de carga límite positivo a V C y V s1 la velocidad de entrada en pérdida en configuración limpia (velocidad mínima para n=1). 2) V A y V S se evaluarán al peso y altitud bajo consideración. 3) V A no necesita ser mayor de la menor de : V C. La velocidad a la cual la curva C Nmáx intersecta a la línea de factor de carga positivo límite de maniobra. La velocidad V A es la máxima velocidad a la cual el piloto puede llevar a cabo una deflexión de una superficie de control a su ángulo máximo. Antes de los años 60, V A era la velocidad más pequeña a la cual se podía alcanzar el factor de carga límite positivo de maniobra (caso c1). A partir de los años 60, los aviones comerciales ya tienen valores del C Nmáx variables con M. A elevados Mach aparece una disminución en el C L debido al bataneo. 8
10 9
11 10
12 11
13 12
14 13
15 14
16 CS Velocidades de proyecto. c) Velocidad de proyecto con flaps, V F : 1) V F para cada posición de flaps debe ser suficientemente mayor que la velocidad operativa recomendada para esa fase del vuelo como para permitir variaciones en el control de la velocidad y transición de una posición de flap a otra. 2) Si se utiliza un dispositivo automático para posicionar el flap o se utiliza algún elemento limitador de la carga, las velocidades y posiciones de flap serán las programadas o permitidas por el dispositivo. 3) V F no será menor que: 1,6 V s1 para flaps despegue a MTOW. 1,8 V s1 para flaps aproximación a MLW 1,8 V S0 para flaps aterrizaje a MLW. Las velocidades V F son unas de las más significativas que afectan al diseño de un avión comercial. Cuanto mayores son, se requiere más estructura en las zonas de unión al cajón de torsión. El propósito de las V F es impedir que el avión entre en pérdida si se retraen los flap a dicha velocidad. 15
17 16
18 CS Factores de carga límite. a) Salvo limitación por C Lmáx, se va a suponer al avión sometido a maniobras simétricas que resulten en los factores de carga límites prescritos. Se tendrán en cuenta las velocidades de cabeceo apropiadas en los tirones y virajes estacionarios correspondientes. b) El factor de carga límite positivo de maniobra para cualquier velocidad hasta V D no será inferior de: ,1+ W salvo que no debe ser inferior a 2,5 ni superior a 3,8, siendo W=MTOW (lb). c) El factor de carga límite negativo de maniobra: 1) No será inferior a 1 a velocidades hasta V C. 2) Debe variar linealmente con la velocidad del valor a V C hasta 0 a V D. d) Se utilizarán factores de carga inferiores a los anteriores si el avión tiene características que le imposibiliten excederlos en vuelo. 17
19 CS Envolvente de maniobra con flaps. a) Si se van a utilizar flaps durante el despegue, la aproximación o el aterrizaje, a las velocidades V F y posiciones de flaps correspondientes se supondrá al avión sometido a maniobras simétricas (y ráfagas). Las cargas límite correspondientes son: 1) Maniobras a factor de carga positivo de 2,0, y 2) Ráfagas... c) Si se van a utilizar dispositivos hipersustentadores en ruta, con los flaps a las velocidades y en las posiciones correspondientes, se supone al avión sometido a maniobras (y ráfagas) dentro del rango determinado por: a) Maniobras al factor de carga límite de maniobra de JAR (b), y b) Ráfagas... d) El avión debe estar diseñado para maniobras a factor de carga 1,5g a MTOW y con los dispositivos hipersustentadores en configuración de aterrizaje. 18
20 F c = Factor de compresibilidad para tener en cuenta este efecto en las cargas sobre los D.H.= 1/(1-M 2 cos 2 (Λ BS )) 1/2 19
21 20
22 21
23 22
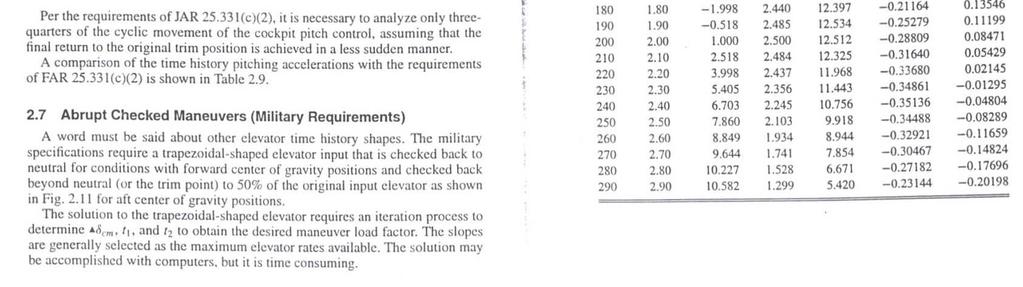
24 CS Maniobras simétricas (1/4). a) Procedimiento: 1) En los desplazamientos súbitos de un control, el ritmo asumido de desplazamiento no será inferior al que sería capaz de realizar el piloto a través del sistema de control del avión. 2) Al determinar los ángulos del timón de profundidad y la distribución de carga en el sentido de la cuerda, se tendrán en cuenta las aceleraciones angulares de cabeceo. b) Maniobras sin aceleración de cabeceo: suponiendo al avión en equilibrio sin aceleración de cabeceo, se estudiarán los puntos A a I de la envolvente de maniobra. 23
25 24
26 CS Maniobras simétricas (2/4). c) Maniobras con aceleración angular de cabeceo: 1) Desplazamiento del timón a V A : Partiendo de una condición de vuelo horizontal estacionario (punto A 1 de la envolvente), el mando de cabeceo se mueve para obtener aceleración máxima positiva de cabeceo (a encabritar). Para definir las cargas sobre la cola, habrá que tener en cuenta la respuesta del avión. Las aceleraciones que se produzcan cuando la aceleración normal en el c.g. supere el factor de carga límite positivo de maniobra (punto A 2 de la envolvente) o cuando las cargas sobre la cola alcancen su valor máximo, lo que ocurra antes, no se tendrán en cuenta. 2) Maniobra contrastada entre V A y V D : Se deben analizar maniobras contrastadas de cabeceo en las cuales se alcance el factor de carga límite de maniobra. Como condición separada, se analizarán maniobras contrastadas de cabeceo en las cuales se alcance n = 0. Al definir las cargas sobre el avión, se supondrá que el control de cabeceo sigue los movimientos de los párrafos (i) a (iv) de este apartado: i. Partiendo con el avión equilibrado a una velocidad entre V A y V D, el control longitudinal se mueve según: δ () t = δ sin( ωt) 0 t tmáx 1 siendo δ 1 el desplazamiento máximo del control en la dirección inicial; δ(t) el ángulo de deflexión de la superficie de control, 25
27 CS Maniobras simétricas (3/4). ii. iii. t máx = 3π/2ω y ω la frecuencia natural no amortiguada del modo de corto periodo, pero no inferior a πv/2v A (V = velocidad del avión al comienzo de la maniobra). Para maniobras de encabritado, la historia del movimiento del control se debe escalar hasta el valor necesario sin superar el n lím Para maniobras a picar, se hará igual pero sin bajar de n = 0. Adicionalmente, para los casos en los que la respuesta del avión al movimiento especificado del control de cabeceo no alcance los factores de carga prescritos, los movimientos que se deben usar son: δ ( t) = δ sin( ωt) δ () t 1 = δ 1 [ ] δ() t = δ sin( ω t+ t t ) t t 1 t1 t t2 t t t 2 máx siendo t 1 = π /2ω, t 2 = t 1 + Δt, t máx = t 2 + π /ω, y Δt = mínimo periodo de tiempo necesario para que se alcance el factor de carga prescrito en la dirección inicial, pero no necesita exceder 5 segundos. 26
28 CS Maniobras simétricas (4/4). iv. En los casos en los que el movimiento del control pueda verse afectado por comandos del sistema de vuelo, entonces los efectos de dichos sistemas deberán tenerse en cuenta. v. No se tendrán en cuenta las cargas sobre el avión que aparezcan más allá de: A. Para maniobras a encabritar, del momento en el cual la aceleración normal al cdg cae por debajo de 0. B. Para maniobras a picar, el momento en el cual la aceleración normal al cdg supera el n lím positivo. C. t máx. 27
29 28
30 29
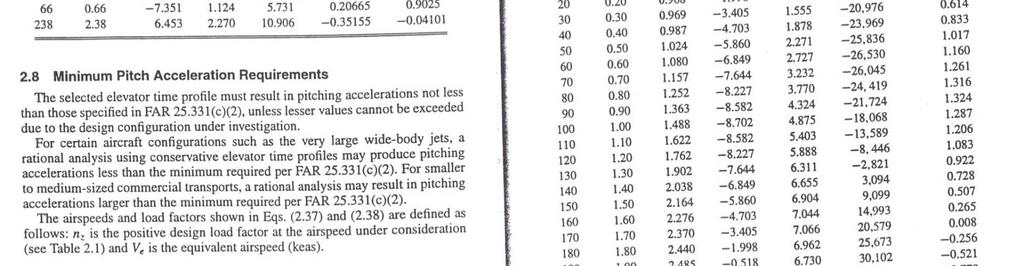
31 Formas de movimiento de un control (1/2) a) UNCHECKED : el mando se mueve de su posición neutra o trimada a una determinada deflexión, y se mantiene en ella. b) CHECKED : el mando se mueve a una deflexión dada y retorna a la posición original. c) EXCITATION : el mando se mueve de forma oscilatoria en ambas direcciones respecto a la posición original. MODO UNCHEKED Hay dos representaciones matemáticamente típicas o comunes: a) Función Rampa: se alcanza instantáneamente un ritmo constante de aplicación antes de ser llevado a cero cuando se alcanza la deflexión requerida. b) Función Exponencial: de nuevo se alcanza instantáneamente un ritmo constante de aplicación pero éste decrece continuamente hasta llegar a cero cuando se alcanza la deflexión deseada. Analíticamente: K = K s (1-e- kt ). 30
32 Formas de movimiento de un control (2/2) MODO CHECKED Hay tres representaciones típicas: a) Función Rampa: del tipo de la función rampa anterior pero con un segundo efecto que incluye que la deflexión del control disminuya. Casos particulares de esta función son la forma triangular y la rectangular. b) Representación Exponencial: K=K M ((1-e -kt )+(1-e -ft )e -ft ), donde f determina el ritmo al cual al movimiento es de tipo checked. K M es el valor máximo de deflexión del control. c) Representación sinusoidal: K = K M.sin (φ), donde φ define la frecuencia del movimiento. MODO EXCITATION Se suele representar como una extensión del modo checked. Es posible modelizarlo como una serie de funciones triangulares o rectangulares aplicadas con amplitudes de signos alternativos. Evidentemente desde un punto de vista matemático, la representación sinusoidal es más conveniente debido a la naturaleza oscilatoria de la función utilizada. 31
33 32
34 Casos longitudinales (1/2) ESTACIONARIO a) Vuelo estacionario no acelerado (uniforme): & θ = && θ = & α = 0 No hay ninguna complicación en las ecuaciones del movimiento y la carga sobre la cola horizontal proviene de las condiciones de equilibrado. b) Maniobra simétrica estacionaria: & θ = & θ = 0 n 1 Se trata de un caso poco realista para las cargas en la cola horizontal relacionado con movimientos del control longitudinal, y se puede dar en el caso de un avión que utilice un control directo sobre la sustentación a través del uso de spoilers o dispositivos hipersustentadores, junto con un uso convencional del control de cabeceo. c) Maniobra simétrica con velocidad de cabeceo constante: & θ = & α = 0 & θ = cte Para un avión con un control longitudinal de tipo convencional, el estudiar el caso de ángulo constante de timón de profundidad para mantener al avión en una maniobra simétrica estacionaria es muy interesante. Si se supone que se parte de la condición de vuelo estacionario nivelado, entonces: Δn = V0θ & / g si el ángulo de ataque es constante, o bien: & θ = ( n 1) g / V0 Conociendo esta aceleración de cabeceo, es posible obtener la nueva carga en el estabilizador horizontal. 33
35 Casos longitudinales (2/2) ACELERACIÓN DE CABECEO Las condiciones de maniobra con aceleración de cabeceo tienen mucho mayor impacto que las anteriores, en el diseño del estabilizador horizontal. Hay que tener en cuenta que además de las de equilibrado, está el incremento en la carga que experimenta el estabilizador debido a la aceleración de cabeceo (y que es directamente proporcional a dicha aceleración): & 2 θ = L l ( m K ) t t y 34
36 35
37 36
38 37
39 38
40 39
41 CS Maniobras asimétricas. Condiciones de balance (1/2) El avión debe estar diseñado para soportar las cargas resultantes de las maniobras de balance especificadas en los apartados a) y b) de este párrafo. Los momentos aerodinámicos alrededor del centro de gravedad no equilibrados deben ponerse en reacción de una forma conservativa, considerando la masas principales que dan lugar a las cargas de inercia de reacción. a) Maniobras: Las siguientes condiciones, velocidades y deflexiones de alerones (excepto que las deflexiones pueden venir limitadas por la fuerza del piloto) deben considerarse en combinación con un factor de carga de 0 o 2/3 del factor de carga límite positivo de maniobra. Al determinar las deflexiones requeridas de alerón, se debe considerar la flexibilidad a torsión de ala de acuerdo con CS (b): 40
42 CS Condiciones de balance (2/2) 1) Se deben investigar las condiciones correspondientes a velocidades de balance estacionarias (p=cte y p =0). Además, también se deben analizar las condiciones correspondientes a máxima aceleración angular de balance para aviones con motores u otros elementos de masa concentrada situados fuera del fuselaje. Para las condiciones de aceleración de balance, se debe suponer una velocidad nula de balance en ausencia de un análisis racional de la evolución histórica de la maniobra. 2) A V A, se asumirá una deflexión súbita a tope del alerón. 3) A V C, la deflexión del alerón debe ser tal que produzca un ritmo de balance no inferior al obtenido en el caso (2). 4) A V D, la deflexión del alerón debe ser tal que produzca un ritmo de balance no inferior a un tercio del obtenido en el caso (2). b) Ráfagas asimétricas: Se supone que el avión está sometido a ráfagas verticales asimétricas a partir de vuelo nivelado. Las cargas límite resultantes se deben determinar bien mediante el cálculo de la carga máxima sobre el ala según (a) o bien la carga máxima sobre el ala indirectamente a partir del factor de carga vertical según (a). Se debe asumir que un 100% de la carga del ala actúa en un lado del avión y el 80% en el otro. 41
43 Desde un punto de vista analítico, se realizan las siguientes hipótesis: 1) Se mantienen constantes la velocidad de vuelo y el Mach (y por tanto la altitud) a lo largo de la maniobra de balance. 2) En el caso de aviones de transporte comercial (25.349), los efectos de acoplamiento de los grados de libertad en balance y guiñada se pueden despreciar. 42
44 43
45 Comentarios sobre condiciones de balance: Las distribuciones que producen estas maniobras hay que superponerlas a los casos n=0 y n=2/3 n lím : 44
46 Si analizamos un perfil en la zona de alerones: 45
47 CS Maniobras asimétricas. Condiciones de guiñada (1/2) El avión debe estar diseñado para soportar las cargas resultantes de las maniobras de guiñada especificadas en los apartados a) a d) de este párrafo a las velocidades desde V MC a V D. Los momentos aerodinámicos alrededor del centro de gravedad no equilibrados deben ponerse en reacción de una forma conservativa. Al considerar las cargas sobre la cola se debe suponer que la velocidad de guiñada es nula. a) Con el avión en vuelo no acelerado sin guiñada, se supone que el mando del timón de dirección se mueve súbitamente para obtener una deflexión limitada por: 1) El sistema de control o los topes de la superficie de control, o 2) Una fuerza a ejercer por el piloto de 1335 N desde V MC a V A y 890 N de V C a V D, con una variación lineal entre V A y V C. b) Con el control del timón de dirección deflectado de esta manera se supone que el avión guiña hasta alcanzar el ángulo de resbalamiento correspondiente. 46
48 CS Maniobras asimétricas. Condiciones de guiñada (2/2) c) Con el avión habiendo alcanzado el ángulo de resbalamiento de equilibrio estático, se supone que el control del timón de dirección se mantiene para alcanzar la máxima deflexión posible dentro de las limitaciones especificadas en el apartado a). d) Con el avión habiendo alcanzado el ángulo de resbalamiento de equilibrio estático del apartado c) de este párrafo, se supone que el control del timón de dirección se devuelve a su posición neutra. 47
49 Las maniobras con guiñada se suponen flat maneouvres, es decir, con las alas a nivel. En la realidad hace falta aplicar mucho control lateral para conseguir esto pero con las alas a nivel se alcanzan los mayores valores de β y esto es útil para el análisis estructural. 48
50 Comentarios sobre condiciones de guiñada: V MC : CS (Subparte B) Minimum control speed. Esa la CAS a la cual, cuando el motor crítico se vuelve inoperativo es posible recobrar el control del avión y mantener el vuelo rectilíneo con cero guiñada y un ángulo de balance inferior a 5º. Además V MC 1,13 V SR, con los motores en condiciones de despegue, configuración de despegue pero tren retraído, sin efecto suelo, MTOW y la posición del cdg más desfavorable. La evolución del ángulo de guiñada y del ángulo de deflexión del timón de dirección en la maniobra especificada puede ser la siguiente: 49
51 50


52 El hecho de que en la norma se dice que al evaluar las cargas en la cola se debe suponer que la velocidad de guiñada es nula implica que cuando se da el golpe al mando, el avión comenzará a girar: y aparece una distribución lineal de velocidad de guiñada que hace que el ángulo de ataque que vea la cola sea: considerar que no hay esta velocidad es, por tanto, conservativo. 51
53 Veamos qué fuerzas actúan en los diversos instantes: 52
54 53
Maniobras Simétricas Estacionarias (1/6)
") () Maniobras Simétricas Estacionarias (1/6) a) Viraje Horizontal b) Variación de nivel de vuelo: Las maniobras simétricas estacionarias se definen como condiciones en las cuales se supone que la aceleración
() Maniobras Simétricas Estacionarias (1/6) a) Viraje Horizontal b) Variación de nivel de vuelo: Las maniobras simétricas estacionarias se definen como condiciones en las cuales se supone que la aceleración
F3/Área de Arquitectura de Avión n y Estructuras
 F3/Área de Arquitectura de Avión n y Estructuras F3.6/Normas de Cálculo C Estructural (4). Envolvente de Ráfagas Dra. Cristina Cuerno Rejado Dpto. Vehículos Aeroespaciales, E.T.S.I.A,, UPM cristina.cuerno@upm.es
F3/Área de Arquitectura de Avión n y Estructuras F3.6/Normas de Cálculo C Estructural (4). Envolvente de Ráfagas Dra. Cristina Cuerno Rejado Dpto. Vehículos Aeroespaciales, E.T.S.I.A,, UPM cristina.cuerno@upm.es
MATERIA: AERODINÁMICA CONTROLADORES DE TRANSITO AÉREO
 MATERIA: AERODINÁMICA CONTROLADORES DE TRANSITO AÉREO 1. EL FACTOR DE CARGA MÁXIMO (NMAX) ES UNA LIMITACIÓN ESTRUCTURAL ESTABLECIDA POR EL FABRICANTE Y ASENTADA EN LA SECCIÓN DE LIMITACIONES DEL MANUAL
MATERIA: AERODINÁMICA CONTROLADORES DE TRANSITO AÉREO 1. EL FACTOR DE CARGA MÁXIMO (NMAX) ES UNA LIMITACIÓN ESTRUCTURAL ESTABLECIDA POR EL FABRICANTE Y ASENTADA EN LA SECCIÓN DE LIMITACIONES DEL MANUAL
2. CO CEPTOS BÁSICOS SOBRE AERO AVES
 2. CO CEPTOS BÁSICOS SOBRE AERO AVES 2.1. PRINCIPIOS AERODINÁMICOS Sobre una aeronave actúan varias fuerzas, algunas favorables y otras desfavorables. Las fuerzas básicas que actúan sobre una aeronave
2. CO CEPTOS BÁSICOS SOBRE AERO AVES 2.1. PRINCIPIOS AERODINÁMICOS Sobre una aeronave actúan varias fuerzas, algunas favorables y otras desfavorables. Las fuerzas básicas que actúan sobre una aeronave
DOCUMENTACIÓN DE CONSULTA PARA LA PRUEBA DE CONOCIMIENTOS BÁSICOS, SOBRE MATERIAS NO ESPECÍFICAS DEL CONTROL DE TRÁFICO AÉREO. TEMA: MECÁNICA DE VUELO
 Convocatoria de Becas para el Curso Básico de Formación de Controladores de la Circulación Aérea, (año 2001). DOCUMENTACIÓN DE CONSULTA PARA LA PRUEBA DE CONOCIMIENTOS BÁSICOS, SOBRE MATERIAS NO ESPECÍFICAS
Convocatoria de Becas para el Curso Básico de Formación de Controladores de la Circulación Aérea, (año 2001). DOCUMENTACIÓN DE CONSULTA PARA LA PRUEBA DE CONOCIMIENTOS BÁSICOS, SOBRE MATERIAS NO ESPECÍFICAS
MATERIA: AERODINÁMICA ULTRALIVIANO
 MATERIA: AERODINÁMICA ULTRALIVIANO 1. LA LÍNEA RECTA QUE UNE EL BORDE DE ATAQUE CON EL BORDE DE SALIDA DE UN PERFIL ALAR, SE DENOMINA: a. CURVATURA MEDIA b. CUERDA c. ESPESOR d. VIENTO RELATIVO 2. VIENTO
MATERIA: AERODINÁMICA ULTRALIVIANO 1. LA LÍNEA RECTA QUE UNE EL BORDE DE ATAQUE CON EL BORDE DE SALIDA DE UN PERFIL ALAR, SE DENOMINA: a. CURVATURA MEDIA b. CUERDA c. ESPESOR d. VIENTO RELATIVO 2. VIENTO
MATERIA: AERODINÁMICA TRIPULANTES DE CABINA
 MATERIA: AERODINÁMICA TRIPULANTES DE CABINA 1. CUANDO HABLAMOS DE LA RAMA DE LA FÍSICA, QUE ESTUDIA LAS REACCIONES DE UN CUERPO QUE SE SITÚA EN UNA CORRIENTE DE AIRE, O AIRE RELATIVO CON RESPECTO A SUS
MATERIA: AERODINÁMICA TRIPULANTES DE CABINA 1. CUANDO HABLAMOS DE LA RAMA DE LA FÍSICA, QUE ESTUDIA LAS REACCIONES DE UN CUERPO QUE SE SITÚA EN UNA CORRIENTE DE AIRE, O AIRE RELATIVO CON RESPECTO A SUS
Módulo 9 MECÁNICA DEL VUELO
 Módulo 9 MECÁNICA DEL VUELO Primera parte: INTRODUCCIÓN 3 1.VISIÓN GENERAL: 2. SISTEMAS DE REFERENCIA: Sistema de ejes Horizonte Local F h Sistema de ejes Viento F w Origen en el centro de masas del avión
Módulo 9 MECÁNICA DEL VUELO Primera parte: INTRODUCCIÓN 3 1.VISIÓN GENERAL: 2. SISTEMAS DE REFERENCIA: Sistema de ejes Horizonte Local F h Sistema de ejes Viento F w Origen en el centro de masas del avión
Descripción del problema
 4 Descripción del problema control_gamma MATLAB Function uje masa alpha_punto xa In1 ya Va gamma In2 theta q In3 alpha_p CL CD In4 Cm Dinámica sistema q m masa -Cmasa on masa1 grator2 1 s control_ft MATLAB
4 Descripción del problema control_gamma MATLAB Function uje masa alpha_punto xa In1 ya Va gamma In2 theta q In3 alpha_p CL CD In4 Cm Dinámica sistema q m masa -Cmasa on masa1 grator2 1 s control_ft MATLAB
DISEÑO DE UN HR-UAV PARA AYUDA HUMANITARIA
 DISEÑO DE UN HR-UAV PARA AYUDA HUMANITARIA FLY AID Juan Carlos Cantero Moriano Cristina Fernández Ruiz David Lucena Pacheco Gabriela Marín Jiménez María del Carmen Martínez Moreno Grupo 4 Cálculo de Aviones
DISEÑO DE UN HR-UAV PARA AYUDA HUMANITARIA FLY AID Juan Carlos Cantero Moriano Cristina Fernández Ruiz David Lucena Pacheco Gabriela Marín Jiménez María del Carmen Martínez Moreno Grupo 4 Cálculo de Aviones
Departamento de Diseño
 Departamento de Diseño DISEÑO Diseños Preliminares DISEÑO Primeras Innovaciones DISEÑO Especificaciones 150 pasajeros en dos clases DISEÑO Capacidad para 168 personas en una sola clase DISEÑO Dimensionamiento
Departamento de Diseño DISEÑO Diseños Preliminares DISEÑO Primeras Innovaciones DISEÑO Especificaciones 150 pasajeros en dos clases DISEÑO Capacidad para 168 personas en una sola clase DISEÑO Dimensionamiento
Mecánica del Vuelo del Avión
 Mecánica del Vuelo del Avión Parte II: Estabilidad y Control Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos Escuela Superior de Ingenieros
Mecánica del Vuelo del Avión Parte II: Estabilidad y Control Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos Escuela Superior de Ingenieros
Mecánica del Vuelo del Avión
 Mecánica del Vuelo del Avión Parte II: Estabilidad y Control Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos Escuela Superior de Ingeniería
Mecánica del Vuelo del Avión Parte II: Estabilidad y Control Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos Escuela Superior de Ingeniería
ENTREGA FINAL Cálculo de Aviones 5º Ing. Aeronaútica Escuela Superior Ingenieros Universidad de Sevil a
 ENTREGA FINAL Cálculo de Aviones 5º Ing. Aeronaútica Escuela Superior Ingenieros Universidad de Sevilla ÍNDICE 1. Diseño 2. Estructuras 3. Actuaciones y Propulsión 4. Estabilidad y Control 5. Aerodinámica
ENTREGA FINAL Cálculo de Aviones 5º Ing. Aeronaútica Escuela Superior Ingenieros Universidad de Sevilla ÍNDICE 1. Diseño 2. Estructuras 3. Actuaciones y Propulsión 4. Estabilidad y Control 5. Aerodinámica
Centro de presiones, centro aerodinámico y cuerda media aerodinámica
 Centro de presiones, centro aerodinámico y cuerda media aerodinámica Apellidos y nombre: García-Cuevas González, Luis Miguel (luiga12@mot.upv.es) 1 Carreres Talens, Marcos (marcarta@mot.upv.es) 1 Tiseira
Centro de presiones, centro aerodinámico y cuerda media aerodinámica Apellidos y nombre: García-Cuevas González, Luis Miguel (luiga12@mot.upv.es) 1 Carreres Talens, Marcos (marcarta@mot.upv.es) 1 Tiseira
David Morán de Godos Miguel Ángel Martín Sanz Vito Mario Fico Jorge Cordero Freile Anna Folch Codera Noelia Pérez Molina
 David Morán de Godos Miguel Ángel Martín Sanz Vito Mario Fico Jorge Cordero Freile Anna Folch Codera Noelia Pérez Molina Vito Mario Fico Diseño Justificación del modelo Diseño Evolución Diseño Evolución
David Morán de Godos Miguel Ángel Martín Sanz Vito Mario Fico Jorge Cordero Freile Anna Folch Codera Noelia Pérez Molina Vito Mario Fico Diseño Justificación del modelo Diseño Evolución Diseño Evolución
AERODINÁMICA Básica e Intermedia.
 Por: Mauricio Azpeitia Perez AERODINÁMICA Básica e Intermedia. Introducción. La teoría de vuelo está basada en la aerodinámica. El término aerodinámica sederiva de la combinación de dos palabras griegas:
Por: Mauricio Azpeitia Perez AERODINÁMICA Básica e Intermedia. Introducción. La teoría de vuelo está basada en la aerodinámica. El término aerodinámica sederiva de la combinación de dos palabras griegas:
Análisis de la Estabilidad y el Control de un avión no tripulado. El proyecto Céfiro
 Análisis de la Estabilidad y el Control de un avión no tripulado. El proyecto Céfiro Autor: Pedro López Teruel Tutor: Sergio Esteban Roncero Departamento Ingeniería Aeroespacial Índice Por qué? Introducción
Análisis de la Estabilidad y el Control de un avión no tripulado. El proyecto Céfiro Autor: Pedro López Teruel Tutor: Sergio Esteban Roncero Departamento Ingeniería Aeroespacial Índice Por qué? Introducción
PEPA Primary Emergency Portable Aid. ESI Universidad de Sevilla
 + ESI Universidad de Sevilla Beatriz Arias Alonso Guillermo Casais Sancho Elena Di Silvestro Elena Escudero Ramos Alberto Márquez Lepe Ana Belén Martín Macareno Cálculo de Aviones 30 de Junio de 2012 PEPA
+ ESI Universidad de Sevilla Beatriz Arias Alonso Guillermo Casais Sancho Elena Di Silvestro Elena Escudero Ramos Alberto Márquez Lepe Ana Belén Martín Macareno Cálculo de Aviones 30 de Junio de 2012 PEPA
PROBLEMAS. Problema 1
 PROBLEMAS Problema 1 Se considera un avión en vuelo de crucero a altitud h y velocidad V constantes. La altitud de vuelo está fijada. Sabiendo que la resistencia aerodinámica viene dada por D = k 1 V 2
PROBLEMAS Problema 1 Se considera un avión en vuelo de crucero a altitud h y velocidad V constantes. La altitud de vuelo está fijada. Sabiendo que la resistencia aerodinámica viene dada por D = k 1 V 2
Figura 1: Ejes de rotación del avión.
 LECTURA DE AERONÁUTICA Centro de gravedad de un avión. M. C. Gabriel F. Martínez Alonso El día 17 de diciembre de 1903 los hermanos Wilbur y Orville Wright fueron los primeros en lograr el vuelo controlado,
LECTURA DE AERONÁUTICA Centro de gravedad de un avión. M. C. Gabriel F. Martínez Alonso El día 17 de diciembre de 1903 los hermanos Wilbur y Orville Wright fueron los primeros en lograr el vuelo controlado,
CÁLCULO DE AVIONES 2012/2013 GRUPO 5
 CÁLCULO DE AVIONES 2012/2013 GRUPO 5 DISEÑO 3 ESTRUCTURAS 9 AERODINÁMICA 17 ACTUACIONES Y PROPULSIÓN 24 ESTABILIDAD Y CONTROL 32 CONCLUSIONES 47 2 Mario Rodríguez García Marta Romero López Evolución. Primera
CÁLCULO DE AVIONES 2012/2013 GRUPO 5 DISEÑO 3 ESTRUCTURAS 9 AERODINÁMICA 17 ACTUACIONES Y PROPULSIÓN 24 ESTABILIDAD Y CONTROL 32 CONCLUSIONES 47 2 Mario Rodríguez García Marta Romero López Evolución. Primera
HISPIAN Solución para personas de altos vuelos. 5º IAN Cálculo de Aviones 1
 HISPIAN 2007 Solución para personas de altos vuelos 5º IAN Cálculo de Aviones 1 Hispian 2007 Introducción Diseño preliminar Diseño Aerodinámica Estructuras Estabilidad y Control Propulsión y Actuaciones
HISPIAN 2007 Solución para personas de altos vuelos 5º IAN Cálculo de Aviones 1 Hispian 2007 Introducción Diseño preliminar Diseño Aerodinámica Estructuras Estabilidad y Control Propulsión y Actuaciones
PRINCIPIOS DE VUELO-4
 1) El ángulo de ataque es: a) El ángulo formado entre la cuerda aerodinámica y el eje longitudinal del avión b) El ángulo formado entre la cuerda aerodinámica y la dirección del viento relativo c) El ángulo
1) El ángulo de ataque es: a) El ángulo formado entre la cuerda aerodinámica y el eje longitudinal del avión b) El ángulo formado entre la cuerda aerodinámica y la dirección del viento relativo c) El ángulo
CÁLCULO DE AVIONES. Grupo 1
 CÁLCULO DE AVIONES Grupo 1 ÍNDICE 0. Empresa y Departamentos 1. Hidrógeno -1.1 Por qué hidrógeno? -1.2 Hidrógeno en el mundo 2. Diseño - 2.1 Evolución del diseño - 2.2 Diseño completo CAD 3. Propulsión
CÁLCULO DE AVIONES Grupo 1 ÍNDICE 0. Empresa y Departamentos 1. Hidrógeno -1.1 Por qué hidrógeno? -1.2 Hidrógeno en el mundo 2. Diseño - 2.1 Evolución del diseño - 2.2 Diseño completo CAD 3. Propulsión
Grupo 8. Alberto Galán Vergara. Francisco Javier Pérez Méndez. Armando Matencio Moreno. Jesús García Martínez. José Eduardo Fernández Guerra
 Grupo 8 Alberto Galán Vergara Francisco Javier Pérez Méndez Armando Matencio Moreno Jesús García Martínez José Eduardo Fernández Guerra Alejandro Andrés Melón Diego Cavero Alonso Vista general Vista componentes
Grupo 8 Alberto Galán Vergara Francisco Javier Pérez Méndez Armando Matencio Moreno Jesús García Martínez José Eduardo Fernández Guerra Alejandro Andrés Melón Diego Cavero Alonso Vista general Vista componentes
DIRECCION DE PERSONAL AERONAUTICO DPTO. DE INSTRUCCION PREGUNTAS Y OPCIONES POR TEMA
 MT DIREION DE PERSONL ERONUTIO DPTO. DE INSTRUION PREGUNTS Y OPIONES POR TEM Pag.: 1 TEM: 0042 DESPHDOR (P. 03) - ERODINMI OD_PREG: PREGUNT: RPT: 8324 uándo se utiliza por lo general los alerones interiores
MT DIREION DE PERSONL ERONUTIO DPTO. DE INSTRUION PREGUNTS Y OPIONES POR TEM Pag.: 1 TEM: 0042 DESPHDOR (P. 03) - ERODINMI OD_PREG: PREGUNT: RPT: 8324 uándo se utiliza por lo general los alerones interiores
Quiénes somos? Soluciones innovadoras con los pies en la tierra
 GRUPO2: ATP1 MIRLO Andrés Fernández Lucena Miguel Á. Vidal Señas José Luis Almenara Ariza Gloria Ortega Pino Luis Ferreira Población Carlos Lucas Rodríguez Área de Diseño: Quiénes somos? Empresa con capital
GRUPO2: ATP1 MIRLO Andrés Fernández Lucena Miguel Á. Vidal Señas José Luis Almenara Ariza Gloria Ortega Pino Luis Ferreira Población Carlos Lucas Rodríguez Área de Diseño: Quiénes somos? Empresa con capital
DISEÑO DE UN UAV LIGERO DE PROPULSIÓN ELÉCTRICA PARA MONITORIZACIÓN MEDIOAMBIENTAL
 Escuela Superior de Ingenieros Universidad de Sevilla DISEÑO DE UN UAV LIGERO DE PROPULSIÓN ELÉCTRICA PARA MONITORIZACIÓN MEDIOAMBIENTAL Noviembre_2010 Autor: Tutor: Aníbal Ollero Baturone Agradecimientos
Escuela Superior de Ingenieros Universidad de Sevilla DISEÑO DE UN UAV LIGERO DE PROPULSIÓN ELÉCTRICA PARA MONITORIZACIÓN MEDIOAMBIENTAL Noviembre_2010 Autor: Tutor: Aníbal Ollero Baturone Agradecimientos
DIRECCION DE PERSONAL AERONAUTICO DPTO. DE INSTRUCCION PREGUNTAS Y OPCIONES POR TEMA
 DIRECCION DE PERSONL ERONUTICO PREGUNTS Y OPCIONES POR TEM 1 TEM: 0824 Lic_TC _erodinámica ásica COD_PREG: PREG20102725 PREGUNT: Se denomina erodinámica a la ciencia que estudia las leyes que rigen el
DIRECCION DE PERSONL ERONUTICO PREGUNTS Y OPCIONES POR TEM 1 TEM: 0824 Lic_TC _erodinámica ásica COD_PREG: PREG20102725 PREGUNT: Se denomina erodinámica a la ciencia que estudia las leyes que rigen el
Tema 6: Diseño del Tren de Aterrizaje
 Tema 6: Diseño del Tren de Aterrizaje 1 Tema 6: Tren de aterrizaje 1. Tren de aterrizaje 2. Disposición del tren de aterrizaje 2.1. Vista de perfil 2.2. Vista en planta 2.3. Vista en alzado 2.4. Límites
Tema 6: Diseño del Tren de Aterrizaje 1 Tema 6: Tren de aterrizaje 1. Tren de aterrizaje 2. Disposición del tren de aterrizaje 2.1. Vista de perfil 2.2. Vista en planta 2.3. Vista en alzado 2.4. Límites
ESTRUCTURA GENERAL DEL CURSO PARA LA OBTENCION DEL CARNET DE PILOTO DE ULTRALIGERO. PROGRAMA DE ENSEÑANZA DEL CURSO.
 ESCUELA DE VUELO SAN TORCUATO ESTRUCTURA GENERAL DEL CURSO PARA LA OBTENCION DEL CARNET DE PILOTO DE ULTRALIGERO. PROGRAMA DE ENSEÑANZA DEL CURSO. A.- CURSO TEORICO I. 1.- Teoría elemental. 1.1.- Introducción.
ESCUELA DE VUELO SAN TORCUATO ESTRUCTURA GENERAL DEL CURSO PARA LA OBTENCION DEL CARNET DE PILOTO DE ULTRALIGERO. PROGRAMA DE ENSEÑANZA DEL CURSO. A.- CURSO TEORICO I. 1.- Teoría elemental. 1.1.- Introducción.
DIRECCION DE PERSONAL AERONAUTICO DPTO. DE INSTRUCCION PREGUNTAS Y OPCIONES POR TEMA
 MT DIREION DE PERSONL ERONUTIO DPTO. DE INSTRUION PREGUNTS Y OPIONES POR TEM 1 TEM: 0042 DESPHDOR (P. 03) - ERODINMI OD_PREG: PREG20074565 (8324) PREGUNT: uándo se utiliza por lo general los alerones interiores
MT DIREION DE PERSONL ERONUTIO DPTO. DE INSTRUION PREGUNTS Y OPIONES POR TEM 1 TEM: 0042 DESPHDOR (P. 03) - ERODINMI OD_PREG: PREG20074565 (8324) PREGUNT: uándo se utiliza por lo general los alerones interiores
Problemas - Aeronaves
 Chapter Problemas - Aeronaves. Problema A. Se considera una avioneta con tren fijo en vuelo simétrico, sin balance, en un plano vertical, conla atmósfera en calma, a un nivel de vuelo dado y en configuración
Chapter Problemas - Aeronaves. Problema A. Se considera una avioneta con tren fijo en vuelo simétrico, sin balance, en un plano vertical, conla atmósfera en calma, a un nivel de vuelo dado y en configuración
Cálculo de aviones Aviones - ULCT. 150 XT The Versatile Freighter DEFAY: 150-XT. Cálculo de Aviones 22/01/07 Pag. 1
 Cálculo de aviones Aviones - ULCT 150 XT The Versatile Freighter Cálculo de Aviones 22/01/07 Pag. 1 Cálculo de aviones Aviones - ULCT Grupo 8: Álvaro CARRASCO Fanny DUCERF David GALLEGO Izabella KASINSKA
Cálculo de aviones Aviones - ULCT 150 XT The Versatile Freighter Cálculo de Aviones 22/01/07 Pag. 1 Cálculo de aviones Aviones - ULCT Grupo 8: Álvaro CARRASCO Fanny DUCERF David GALLEGO Izabella KASINSKA
Ejercicio = 216,65 K; P 0. /S para resolver el problema. SOLUCIÓN: Condición de vuelo: M 0
 Ejercicio Calcular el exceso de potencia específica y la relación empuje/peso que tiene que tener un avión comercial para que en condiciones de crucero: M 0 = 0,85; a = 11000 m (T 0 = 216,65 K; P 0 = 22,6345
Ejercicio Calcular el exceso de potencia específica y la relación empuje/peso que tiene que tener un avión comercial para que en condiciones de crucero: M 0 = 0,85; a = 11000 m (T 0 = 216,65 K; P 0 = 22,6345
DIRECCION DE PERSONAL AERONAUTICO DPTO. DE INSTRUCCION PREGUNTAS Y OPCIONES POR TEMA
 MT DIREION DE PERSONL ERONUTIO DPTO. DE INSTRUION PREGUNTS Y OPIONES POR TEM 1 TEM: 0832 Lic_Piloto PRI- - erodinámica OD_PREG: PREG20103076 (3312) PREGUNT: En qué consiste el efecto suelo? El resultado
MT DIREION DE PERSONL ERONUTIO DPTO. DE INSTRUION PREGUNTS Y OPIONES POR TEM 1 TEM: 0832 Lic_Piloto PRI- - erodinámica OD_PREG: PREG20103076 (3312) PREGUNT: En qué consiste el efecto suelo? El resultado
Problema 1 (60 minutos - 5 puntos)
") Amplitude Imaginary Axis EXAMEN DE JULIO DE REGULACIÓN AUTOMÁTICA (13/14) Problema 1 (6 minutos - 5 puntos) El control de temperatura de la planta Peltier de la asignatura es realizado mediante un sistema
Amplitude Imaginary Axis EXAMEN DE JULIO DE REGULACIÓN AUTOMÁTICA (13/14) Problema 1 (6 minutos - 5 puntos) El control de temperatura de la planta Peltier de la asignatura es realizado mediante un sistema
ACTUACIONES VUELO-1. 5) La línea roja en un anemómetro indica: a) VNE b) VNO c) Vs1 d) Vs2
 La línea roja en un anemómetro indica: a) VNE b) VNO c) Vs1 d) Vs2") 1) Qué significado tiene en un avión, un coeficiente de planeo 7:1? a) Desciende 7 metros en un segundo. b) Recorre 7 metros en un segundo. c) Recorre 7 metros en horizontal por cada 1 metro de descenso.
1) Qué significado tiene en un avión, un coeficiente de planeo 7:1? a) Desciende 7 metros en un segundo. b) Recorre 7 metros en un segundo. c) Recorre 7 metros en horizontal por cada 1 metro de descenso.
F3/Área de Arquitectura de Avión n y Estructuras
 F3/Área de Arquitectura de Avión n y Estructuras F3.5/Normas de Cálculo C Estructural (1). Presentación Dra. Cristina Cuerno Rejado Dpto. Vehículos Aeroespaciales, E.T.S.I.A,, UPM cristina.cuerno@upm.es
F3/Área de Arquitectura de Avión n y Estructuras F3.5/Normas de Cálculo C Estructural (1). Presentación Dra. Cristina Cuerno Rejado Dpto. Vehículos Aeroespaciales, E.T.S.I.A,, UPM cristina.cuerno@upm.es
Aeronaves y Vehículos Espaciales
 Aeronaves y Vehículos Espaciales Tema 4 Aerodinámica del Avión Parte II - Alas en Régimen Incompresible Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica
Aeronaves y Vehículos Espaciales Tema 4 Aerodinámica del Avión Parte II - Alas en Régimen Incompresible Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica
Mecánica del Vuelo del Avión
 Mecánica del Vuelo del Avión Parte I: Actuaciones del Avión Sergio Esteban Roncero Francisco Gavilán Jiménez Escuela Superior de Ingenieros Universidad de Sevilla Curso 2007-2008 23/03/2009 Aeronaves y
Mecánica del Vuelo del Avión Parte I: Actuaciones del Avión Sergio Esteban Roncero Francisco Gavilán Jiménez Escuela Superior de Ingenieros Universidad de Sevilla Curso 2007-2008 23/03/2009 Aeronaves y
Diseño Estructural de Aviones
 Diseño Estructural de Aviones Apuntes curso 2007 2008 Escuela Técnica Superior de Ingenieros Aeronáuticos Ricardo Sánchez Medina TEMA 2 CERTIFICACIÓN DE AVIONES... 6 1) INTRODUCCIÓN... 6 2) CONCEPTO DE
Diseño Estructural de Aviones Apuntes curso 2007 2008 Escuela Técnica Superior de Ingenieros Aeronáuticos Ricardo Sánchez Medina TEMA 2 CERTIFICACIÓN DE AVIONES... 6 1) INTRODUCCIÓN... 6 2) CONCEPTO DE
ACTUACIONES VUELO-4. 10) El aumento de flaps hace que la resistencia: a) Aumente. b) Disminuya. c) Permanezca constante.
 El aumento de flaps hace que la resistencia: a) Aumente. b) Disminuya. c) Permanezca constante.") 1) La altitud de presión se define como: a) La presión que marca el altímetro que se ha reglado a la elevación del aeródromo. b) La presión que marca el altímetro que se ha reglado al nivel del mar con
1) La altitud de presión se define como: a) La presión que marca el altímetro que se ha reglado a la elevación del aeródromo. b) La presión que marca el altímetro que se ha reglado al nivel del mar con
F1 Mecánica del Vuelo
 F1.1 Introducción n a la Mecánica del Vuelo Miguel Ángel Gómez G Tierno DVA/ETSIA Madrid, 7 octubre 2008 ÍNDICE Definición de la Mecánica del Vuelo Áreas de la Mecánica del Vuelo Actuaciones Estabilidad
F1.1 Introducción n a la Mecánica del Vuelo Miguel Ángel Gómez G Tierno DVA/ETSIA Madrid, 7 octubre 2008 ÍNDICE Definición de la Mecánica del Vuelo Áreas de la Mecánica del Vuelo Actuaciones Estabilidad
Diseño conceptual de un UAV
 Diseño conceptual de un UAV Bernal Ortega Carlos De Augusto Gil, José Luis López Teruel, Pedro Martín Cañal, Adrián Pérez Alcaraz, Daniel Samblás Carrasco, Francisco Ventura Diseño conceptual de un uav
Diseño conceptual de un UAV Bernal Ortega Carlos De Augusto Gil, José Luis López Teruel, Pedro Martín Cañal, Adrián Pérez Alcaraz, Daniel Samblás Carrasco, Francisco Ventura Diseño conceptual de un uav
TEMA 8: MOVIMIENTO OSCILATORIO Introducción
 TEMA 8: MOVIMIENTO OSCILATORIO 8..-Introducción Decimos que una partícula realiza un movimiento periódico cuando a intervalos iguales de tiempo, llamados periodo T, su posición, x, velocidad, v, y aceleración,
TEMA 8: MOVIMIENTO OSCILATORIO 8..-Introducción Decimos que una partícula realiza un movimiento periódico cuando a intervalos iguales de tiempo, llamados periodo T, su posición, x, velocidad, v, y aceleración,
Posición de un Cuerpo. Elementos para la descripción del movimiento. Vector de Posición y Vector Desplazamiento
 1 Bárbara Cánovas Conesa 637 70 113 www.clasesalacarta.com 1 Cinemática Posición de un Cuerpo Coordenadas Cartesianas Coordenadas Polares Vector de Posición (,, z) r, q r Elementos para la descripción
1 Bárbara Cánovas Conesa 637 70 113 www.clasesalacarta.com 1 Cinemática Posición de un Cuerpo Coordenadas Cartesianas Coordenadas Polares Vector de Posición (,, z) r, q r Elementos para la descripción
PRINCIPIOS DE VUELO-3
 1) La curvatura superior que va desde el borde de ataque al borde de salida en un ala, se denomina: a) Cuerda b) Curvatura media c) Extradós d) Intradós 2) El aumento del factor de carga (N) puede llegar
1) La curvatura superior que va desde el borde de ataque al borde de salida en un ala, se denomina: a) Cuerda b) Curvatura media c) Extradós d) Intradós 2) El aumento del factor de carga (N) puede llegar
CONCEPTO DE CINEMÁTICA: es el estudio del movimiento sin atender a las causas que lo producen
 CINEMÁTICA CONCEPTO DE CINEMÁTICA: es el estudio del movimiento sin atender a las causas que lo producen CONCEPTO DE MOVIMIENTO: el movimiento es el cambio de posición, de un cuerpo, con el tiempo (este
CINEMÁTICA CONCEPTO DE CINEMÁTICA: es el estudio del movimiento sin atender a las causas que lo producen CONCEPTO DE MOVIMIENTO: el movimiento es el cambio de posición, de un cuerpo, con el tiempo (este
PRINCIPIOS DE VUELO-2
 1) El borde de ataque es: a) La parte trasera del ala. b) La parte frontal o delantera de un perfil alar. c) El morro del ultraligero d) La parte delantera del motor 2) Qué es el viento relativo?: a) El
1) El borde de ataque es: a) La parte trasera del ala. b) La parte frontal o delantera de un perfil alar. c) El morro del ultraligero d) La parte delantera del motor 2) Qué es el viento relativo?: a) El
Mecánica del Vuelo del Avión
 Mecánica del Vuelo del Avión Parte I: Actuaciones del Avión Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos Escuela Superior de Ingeniería
Mecánica del Vuelo del Avión Parte I: Actuaciones del Avión Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos Escuela Superior de Ingeniería
Mecánica del Vuelo del Avión
 Mecánica del Vuelo del Avión Parte I: Actuaciones del Avión Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos Escuela Superior de Ingenieros
Mecánica del Vuelo del Avión Parte I: Actuaciones del Avión Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos Escuela Superior de Ingenieros
donde g es la gravedad y l es la longitud de la
 Bioclimática Lección: Principios físicos de vibraciones Elaborado por: Pilar Cristina Barrera Silva Mg. Educación, Física, Licenciada en Artes Plásticas Investigadora en Bioclimática y en Didáctica de
Bioclimática Lección: Principios físicos de vibraciones Elaborado por: Pilar Cristina Barrera Silva Mg. Educación, Física, Licenciada en Artes Plásticas Investigadora en Bioclimática y en Didáctica de
Revisión de Tareas para la 3ª Entrega
 1 Revisión de Tareas para la 3ª Entrega Sergio Esteban Roncero Departamento de Ingeniería Aeroespacial Y Mecánica de Fluidos Revisión de las diferentes áreas Aerodinámica Estructuras y Pesos Estabilidad
1 Revisión de Tareas para la 3ª Entrega Sergio Esteban Roncero Departamento de Ingeniería Aeroespacial Y Mecánica de Fluidos Revisión de las diferentes áreas Aerodinámica Estructuras y Pesos Estabilidad
Estabilidades estática y dinámica
 Estabilidades estática y dinámica Por estabilidad estática se entiende la respuesta de un sistema cuando se le mueve de una posición de equilibrio. En nuestro caso, la estabilidad que nos interesa es la
Estabilidades estática y dinámica Por estabilidad estática se entiende la respuesta de un sistema cuando se le mueve de una posición de equilibrio. En nuestro caso, la estabilidad que nos interesa es la
PRINCIPIOS DE VUELO-1
 1) La línea recta que une el borde de ataque con el borde de salida de un perfil alar, se denomina: a) Curvatura media b) Cuerda c) Espesor d) Viento relativo 2) Las cuatro fuerzas principales que actúan
1) La línea recta que une el borde de ataque con el borde de salida de un perfil alar, se denomina: a) Curvatura media b) Cuerda c) Espesor d) Viento relativo 2) Las cuatro fuerzas principales que actúan
Actuaciones. Autorrotación. Referencia Básica [EMC05] Helicópteros () Actuaciones Autorrotación 1 / 31
![Actuaciones. Autorrotación. Referencia Básica [EMC05] Helicópteros () Actuaciones Autorrotación 1 / 31](/thumbs/93/112340213.jpg "Actuaciones. Autorrotación. Referencia Básica [EMC05] Helicópteros () Actuaciones Autorrotación 1 / 31") Actuaciones Autorrotación. Referencia Básica [EMC05] Helicópteros () Actuaciones Autorrotación 1 / 31 Introducción La maniobra de autorrotación se denió como la rotación del rotor sin aplicación de potencia
Actuaciones Autorrotación. Referencia Básica [EMC05] Helicópteros () Actuaciones Autorrotación 1 / 31 Introducción La maniobra de autorrotación se denió como la rotación del rotor sin aplicación de potencia
Simulador del UAV. control_gamma MATLAB Function. masa. alpha_punto. Dinámica sistema. theta. masa. masa1. gamma. -Cmasa. control_ft MATLAB Function
 6 Simulador del UAV control_gamma MATLAB Function uje masa alpha_punto xa In1 ya Va gamma In2 theta q In3 alpha_p CL CD In4 Cm Dinámica sistema q m masa -Cmasa on masa1 grator2 1 s control_ft MATLAB Function
6 Simulador del UAV control_gamma MATLAB Function uje masa alpha_punto xa In1 ya Va gamma In2 theta q In3 alpha_p CL CD In4 Cm Dinámica sistema q m masa -Cmasa on masa1 grator2 1 s control_ft MATLAB Function
ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA AERONÁUTICA Y DEL ESPACIO FÍSICA I
 ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA AERONÁUTICA Y DEL ESPACIO FÍSICA I PROBLEMAS PROPUESTOS 2.- CINEMÁTICA DE LA PARTÍCULA 2 Cinemática de la partícula PROBLEMA PROPUESTO 2.1. Para la curva de ecuación
ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA AERONÁUTICA Y DEL ESPACIO FÍSICA I PROBLEMAS PROPUESTOS 2.- CINEMÁTICA DE LA PARTÍCULA 2 Cinemática de la partícula PROBLEMA PROPUESTO 2.1. Para la curva de ecuación
Problemas de Ondas. Para averiguar la fase inicial: Para t = 0 y x = 0, y (x,t) = A
 = A") Problemas de Ondas.- Una onda transversal sinusoidal, que se propaga de derecha a izquierda, tiene una longitud de onda de 0 m, una amplitud de 4 m y una velocidad de propagación de 00 m/s. Si el foco
Problemas de Ondas.- Una onda transversal sinusoidal, que se propaga de derecha a izquierda, tiene una longitud de onda de 0 m, una amplitud de 4 m y una velocidad de propagación de 00 m/s. Si el foco
Vuelo vertical en helicópteros
 Vuelo vertical en helicópteros Apellidos y nombre: García-Cuevas González, Luis Miguel (luiga12@mot.upv.es) 1 Carreres Talens, Marcos (marcarta@mot.upv.es) 1 Tiseira Izaguirre, Andrés Omar (anti1@mot.upv.es)
Vuelo vertical en helicópteros Apellidos y nombre: García-Cuevas González, Luis Miguel (luiga12@mot.upv.es) 1 Carreres Talens, Marcos (marcarta@mot.upv.es) 1 Tiseira Izaguirre, Andrés Omar (anti1@mot.upv.es)
BACHILLERATO FÍSICA C. MOVIMIENTOS OSCILATORIOS. Dpto. de Física y Química. R. Artacho
 BACHILLERATO FÍSICA C. MOVIMIENTOS OSCILATORIOS R. Artacho Dpto. de Física y Química ÍNDICE 1. Oscilaciones o vibraciones armónicas 2. El movimiento armónico simple 3. Consideraciones dinámicas del MAS
BACHILLERATO FÍSICA C. MOVIMIENTOS OSCILATORIOS R. Artacho Dpto. de Física y Química ÍNDICE 1. Oscilaciones o vibraciones armónicas 2. El movimiento armónico simple 3. Consideraciones dinámicas del MAS
Profesora: Dra. en C. Nallely P. Jiménez Mancilla
 Profesora: Dra. en C. Nallely P. Jiménez Mancilla Magnitudes Escalares: Solo se necesita expresar el numero y la unidad de medida. Ejemplo: 22 kg, 200 m, 25 C. Magnitudes Vectoriales: Además de ser necesario
Profesora: Dra. en C. Nallely P. Jiménez Mancilla Magnitudes Escalares: Solo se necesita expresar el numero y la unidad de medida. Ejemplo: 22 kg, 200 m, 25 C. Magnitudes Vectoriales: Además de ser necesario
Cinemática: parte de la Física que estudia el movimiento de los cuerpos.
 CINEMÁTICA Cinemática: parte de la Física que estudia el movimiento de los cuerpos. Movimiento: cambio de posición de un cuerpo respecto de un punto de referencia que se supone fijo. Objetivo del estudio
CINEMÁTICA Cinemática: parte de la Física que estudia el movimiento de los cuerpos. Movimiento: cambio de posición de un cuerpo respecto de un punto de referencia que se supone fijo. Objetivo del estudio
TEMA II: CINEMÁTICA I
 1 TEMA II: CINEMÁTICA I 1- LA MECÁNICA La Mecánica es la parte de la física que estudia el movimiento de los cuerpos. Puede subdividirse en dos bloques: Cinemática: trata el movimiento sin ocuparse de
1 TEMA II: CINEMÁTICA I 1- LA MECÁNICA La Mecánica es la parte de la física que estudia el movimiento de los cuerpos. Puede subdividirse en dos bloques: Cinemática: trata el movimiento sin ocuparse de
CÁLCULO DE AVIONES PERRY-I
 CÁLCULO DE AVIONES PERRY-I Ricardo Blanco Poole Elio Carrasco Guerrero José Carlos García Hiniesta Francisco José Macías Beltrán Alejandro Martín Garrido 2 ÍNDICE DISEÑO AERODINÁMICA ESTABILIDAD Y CONTROL
CÁLCULO DE AVIONES PERRY-I Ricardo Blanco Poole Elio Carrasco Guerrero José Carlos García Hiniesta Francisco José Macías Beltrán Alejandro Martín Garrido 2 ÍNDICE DISEÑO AERODINÁMICA ESTABILIDAD Y CONTROL
2 o Bachillerato. Conceptos básicos
 Física 2 o Bachillerato Conceptos básicos Movimiento. Cambio de posición de un cuerpo respecto de un punto que se toma como referencia. Cinemática. Parte de la Física que estudia el movimiento de los cuerpos
Física 2 o Bachillerato Conceptos básicos Movimiento. Cambio de posición de un cuerpo respecto de un punto que se toma como referencia. Cinemática. Parte de la Física que estudia el movimiento de los cuerpos
Describe el movimiento sin atender a las causas que lo producen. Utilizaremos partículas puntuales
 3. Cinemática Cinemática Describe el movimiento sin atender a las causas que lo producen Utilizaremos partículas puntuales Una partícula puntual es un objeto con masa, pero con dimensiones infinitesimales
3. Cinemática Cinemática Describe el movimiento sin atender a las causas que lo producen Utilizaremos partículas puntuales Una partícula puntual es un objeto con masa, pero con dimensiones infinitesimales
BACHILLERATO FÍSICA B. REPASO DE MECÁNICA. Dpto. de Física y Química. R. Artacho
 BACHILLERATO FÍSICA B. REPASO DE MECÁNICA R. Artacho Dpto. de Física y Química B. REPASO DE MECÁNICA ÍNDICE 1. Las magnitudes cinemáticas 2. Movimientos en una dimensión. Movimientos rectilíneos 3. Movimientos
BACHILLERATO FÍSICA B. REPASO DE MECÁNICA R. Artacho Dpto. de Física y Química B. REPASO DE MECÁNICA ÍNDICE 1. Las magnitudes cinemáticas 2. Movimientos en una dimensión. Movimientos rectilíneos 3. Movimientos
VELOCIDADES. Gaspar Gasparoni I V A O A R G E N T I N A 1 V A O.COM.A R
 VELOCIDADES Gaspar Gasparoni 1 1. DEF INICIONES INTRODUCCIÓN La velocidad aerodinámica es la velocidad de una aeronave con respecto al aire. Las más comunes son: velocidad indicada = IAS (indicated airspeed)
VELOCIDADES Gaspar Gasparoni 1 1. DEF INICIONES INTRODUCCIÓN La velocidad aerodinámica es la velocidad de una aeronave con respecto al aire. Las más comunes son: velocidad indicada = IAS (indicated airspeed)
LISTA DE SÍMBOLOS. Capítulo 2 EJEMPLOS Y TEORIA DE LAS VIBRACIONES PARAMÉTRICAS 2.1 Introducción T - Periodo Ω - Frecuencia a- parámetro b- parámetro
 LISTA DE SÍMBOLOS Capítulo 2 EJEMPLOS Y TEORIA DE LAS VIBRACIONES PARAMÉTRICAS 2.1 Introducción T - Periodo Ω - Frecuencia a- parámetro b- parámetro 2.1.1 Rigidez Flexiva que Difiere en dos Ejes x- Desplazamiento
LISTA DE SÍMBOLOS Capítulo 2 EJEMPLOS Y TEORIA DE LAS VIBRACIONES PARAMÉTRICAS 2.1 Introducción T - Periodo Ω - Frecuencia a- parámetro b- parámetro 2.1.1 Rigidez Flexiva que Difiere en dos Ejes x- Desplazamiento
DISPOSITIVOS HIPERSUSTENTADORES
 DISPOSITIVOS HIPERSUSTENTADORES Clasesv3 y 4 Un dispositivo hipersustentador es un ingenio aerodinámico diseñado para aumentar la sustentación, en determinadas fases del vuelo de una aeronave. Su fin es
DISPOSITIVOS HIPERSUSTENTADORES Clasesv3 y 4 Un dispositivo hipersustentador es un ingenio aerodinámico diseñado para aumentar la sustentación, en determinadas fases del vuelo de una aeronave. Su fin es
3. Según el modelo de Atmósfera Estándar Internacional, si en la troposfera aumenta la altura:
 Preguntas de teoría 1. La Organización de Aviación Civil Internacional (OACI) se crea a) en 1944 a raíz de la firma del Convenio de la Haya. b) en 1944 a raíz de la firma del Convenio de Chicago. c) en
Preguntas de teoría 1. La Organización de Aviación Civil Internacional (OACI) se crea a) en 1944 a raíz de la firma del Convenio de la Haya. b) en 1944 a raíz de la firma del Convenio de Chicago. c) en
En este tema se analizan las actuaciones de punto en viraje horizontal.
 TEMA 5 ACTUACIONES EN VIRAJE En este tema se analizan las actuaciones de punto en viraje horizontal. 5. Actuaciones de punto en viraje horizontal En este problema las ecuaciones son T (h, V, π) = D(h,
TEMA 5 ACTUACIONES EN VIRAJE En este tema se analizan las actuaciones de punto en viraje horizontal. 5. Actuaciones de punto en viraje horizontal En este problema las ecuaciones son T (h, V, π) = D(h,
MOVIMIENTO OSCILATORIO O VIBRATORIO
 MOVIMIENTO OSCILATORIO O VIBRATORIO 1. Movimiento armónico simple (MAS). 2. Ecuaciones del MAS. 3. Dinámica del MAS. 4. Energía del MAS. 5. El oscilador armónico. 6. El péndulo simple. Física 2º bachillerato
MOVIMIENTO OSCILATORIO O VIBRATORIO 1. Movimiento armónico simple (MAS). 2. Ecuaciones del MAS. 3. Dinámica del MAS. 4. Energía del MAS. 5. El oscilador armónico. 6. El péndulo simple. Física 2º bachillerato
3.1. Estructura del avión.
 Capítulo 3. Estudio del producto. 3.1. Estructura del avión. La estructura de un avión se considera generalmente compuesta de cinco partes principales: el fuselaje, las alas, los estabilizadores, las superficies
Capítulo 3. Estudio del producto. 3.1. Estructura del avión. La estructura de un avión se considera generalmente compuesta de cinco partes principales: el fuselaje, las alas, los estabilizadores, las superficies
ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL FACULTAD DE CIENCIAS NATURALES Y MATEMÁTICAS DEPARTAMENTO DE FÍSICA
 ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL FACULTAD DE CIENCIAS NATURALES Y MATEMÁTICAS DEPARTAMENTO DE FÍSICA SEGUNDA EVALUACIÓN DE FÍSICA A SEPTIEMBRE 3 DE 2014 SOLUCIÓN Pregunta 1 (2 puntos) Un grifo
ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL FACULTAD DE CIENCIAS NATURALES Y MATEMÁTICAS DEPARTAMENTO DE FÍSICA SEGUNDA EVALUACIÓN DE FÍSICA A SEPTIEMBRE 3 DE 2014 SOLUCIÓN Pregunta 1 (2 puntos) Un grifo
Tema 4 Aerodinámica del Avión
 Introducción a la Ing. Aeroespacial Tema 4 Aerodinámica del Avión Parte II - Alas en Régimen Incompresible Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica
Introducción a la Ing. Aeroespacial Tema 4 Aerodinámica del Avión Parte II - Alas en Régimen Incompresible Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica
Cálculo de Aviones 2011 Sergio Esteban Roncero 1. para la 2ª Entrega. Departamento de Ingeniería Aeroespacial Y Mecánica de Fluidos
 Cálculo de Aviones 2011 Sergio Esteban Roncero 1 Revisión de Tareas para la 2ª Entrega Sergio Esteban Roncero Departamento de Ingeniería Aeroespacial Y Mecánica de Fluidos 2 Revisión 2.0 (01-04-11) -I
Cálculo de Aviones 2011 Sergio Esteban Roncero 1 Revisión de Tareas para la 2ª Entrega Sergio Esteban Roncero Departamento de Ingeniería Aeroespacial Y Mecánica de Fluidos 2 Revisión 2.0 (01-04-11) -I
II. Vibración libre de un sistema de un grado de libertad
 Objetivos: 1. Definir que es vibración libre. 2. Recordar el método de diagrama de cuerpo libre para deducir las ecuaciones de movimiento. 3. Introducir el método de conservación de energía para deducir
Objetivos: 1. Definir que es vibración libre. 2. Recordar el método de diagrama de cuerpo libre para deducir las ecuaciones de movimiento. 3. Introducir el método de conservación de energía para deducir
Seminario. Física SÓLIDO RÍGIDO
 Seminario Física SÓLIDO RÍGIDO ENUNCIADO PROBLEMA CHOQUE MASA-VARILLA. Disponemos de una varilla que puede girar libremente en un plano vertical en torno a un eje fijo que pasa por uno de sus extremos.
Seminario Física SÓLIDO RÍGIDO ENUNCIADO PROBLEMA CHOQUE MASA-VARILLA. Disponemos de una varilla que puede girar libremente en un plano vertical en torno a un eje fijo que pasa por uno de sus extremos.
Clase 1 Piloto Comercial con HVI Aerodinámica 2015 AERODINÁMICA
 AERODINÁMICA La aerodinámica estudia el movimiento de los gases. En el caso aeronáutico nos interesan los efectos del aire que rodea la Tierra en el movimiento de las aeronaves. La atmósfera tiene un espesor
AERODINÁMICA La aerodinámica estudia el movimiento de los gases. En el caso aeronáutico nos interesan los efectos del aire que rodea la Tierra en el movimiento de las aeronaves. La atmósfera tiene un espesor
Clases 5 y 6 Piloto Comercial con HVI Aerodinámica Construcción y uso de las curvas de un avión para el VRN
 Construcción y uso de las curvas de un avión para el VRN Si ud conoce el perfil del ala de su avión, el peso y la superficie alar puede construir en forma aproximada las curvas de su avión, para ser utilizadas
Construcción y uso de las curvas de un avión para el VRN Si ud conoce el perfil del ala de su avión, el peso y la superficie alar puede construir en forma aproximada las curvas de su avión, para ser utilizadas
Problemas. Laboratorio. Física moderna 09/11/07 DEPARTAMENTO DE FÍSICA E QUÍMICA. Nombre:
 Física moderna 9/11/7 DEPARTAMENTO DE FÍSICA E QUÍMICA Problemas Nombre: 1. Un muelle de constante k =, 1 3 N/m está apoyado en una superficie horizontal sin rozamiento. A 1, m hay un bucle vertical de
Física moderna 9/11/7 DEPARTAMENTO DE FÍSICA E QUÍMICA Problemas Nombre: 1. Un muelle de constante k =, 1 3 N/m está apoyado en una superficie horizontal sin rozamiento. A 1, m hay un bucle vertical de
Actuaciones. Aterrizaje y Despegue. Referencia Básica [EMC05] Helicópteros () Actuaciones Aterrizaje y despegue 1 / 27
![Actuaciones. Aterrizaje y Despegue. Referencia Básica [EMC05] Helicópteros () Actuaciones Aterrizaje y despegue 1 / 27](/thumbs/60/44967248.jpg "Actuaciones. Aterrizaje y Despegue. Referencia Básica [EMC05] Helicópteros () Actuaciones Aterrizaje y despegue 1 / 27") Actuaciones Aterrizaje y Despegue. Referencia Básica [EMC05] Helicópteros () Actuaciones Aterrizaje y despegue 1 / 27 Introducción Desde el punto de vista de la maniobrabilidad, el helicóptero es una de
Actuaciones Aterrizaje y Despegue. Referencia Básica [EMC05] Helicópteros () Actuaciones Aterrizaje y despegue 1 / 27 Introducción Desde el punto de vista de la maniobrabilidad, el helicóptero es una de
Física Ondas 10/11/06
 Física Ondas 10/11/06 I.E.S. Elviña DEPARTAMENTO DE FÍSICA E QUÍMICA Nombre Problemas [5 Ptos.] 1. Para el proyectil de la figura, calcula: (a) El vector velocidad con que se incrusta en el suelo. [1]
Física Ondas 10/11/06 I.E.S. Elviña DEPARTAMENTO DE FÍSICA E QUÍMICA Nombre Problemas [5 Ptos.] 1. Para el proyectil de la figura, calcula: (a) El vector velocidad con que se incrusta en el suelo. [1]
UNIVERSIDAD NACIONAL DE EDUCACIÓN A DISTANCIA
 UNIVERSIDAD NACIONAL DE EDUCACIÓN A DISTANCIA NOMBRE... APELLIDOS... CALLE... POBLACIÓN... PROVINCIA... C. P.... SISTEMAS MECÁNICOS E.T.S. de Ingenieros Industriales PRUEBA DE EVALUACIÓN A DISTANCIA /
UNIVERSIDAD NACIONAL DE EDUCACIÓN A DISTANCIA NOMBRE... APELLIDOS... CALLE... POBLACIÓN... PROVINCIA... C. P.... SISTEMAS MECÁNICOS E.T.S. de Ingenieros Industriales PRUEBA DE EVALUACIÓN A DISTANCIA /
Capítulo 2 Resolución de la Ecuación de Oscilación
 ELC-3054 Sistemas de Potencia II Capítulo Resolución de la Ecuación de Oscilación Prof. Francisco M. González-Longatt fglongatt@ieee.org http://www.giaelec.org/fglongatt/sp.htm Sistemas de Potencia II
ELC-3054 Sistemas de Potencia II Capítulo Resolución de la Ecuación de Oscilación Prof. Francisco M. González-Longatt fglongatt@ieee.org http://www.giaelec.org/fglongatt/sp.htm Sistemas de Potencia II
Examen de TEORIA DE MAQUINAS Diciembre 03 Nombre...
 Examen de TEORIA DE MAQUINAS Diciembre 03 Nombre... La figura muestra un manipulador paralelo horizontal plano, que consta de una plataforma en forma de triángulo equilátero de lado l, cuya masa m se halla
Examen de TEORIA DE MAQUINAS Diciembre 03 Nombre... La figura muestra un manipulador paralelo horizontal plano, que consta de una plataforma en forma de triángulo equilátero de lado l, cuya masa m se halla
3 Movimiento vibratorio armónico
 3 Movimiento vibratorio armónico Actividades del interior de la unidad. Una partícula que oscila armónicamente inicia su movimiento en un extremo de su trayectoria y tarda 0, s en ir al centro de esta,
3 Movimiento vibratorio armónico Actividades del interior de la unidad. Una partícula que oscila armónicamente inicia su movimiento en un extremo de su trayectoria y tarda 0, s en ir al centro de esta,
B. REPASO DE MECÁNICA ÍNDICE
 BACHILLERATO FÍSICA B. REPASO DE MECÁNICA R. Artacho Dpto. de Física y Química B. REPASO DE MECÁNICA ÍNDICE 1. Las magnitudes cinemáticas 2. Movimientos en una dimensión. Movimientos rectilíneos 3. Movimientos
BACHILLERATO FÍSICA B. REPASO DE MECÁNICA R. Artacho Dpto. de Física y Química B. REPASO DE MECÁNICA ÍNDICE 1. Las magnitudes cinemáticas 2. Movimientos en una dimensión. Movimientos rectilíneos 3. Movimientos
MDOF. Dinámica Estructural Aplicada II C 2012 UCA
 MDOF Dinámica Estructural Aplicada II C 2012 UCA Desde el punto de vista dinámico, interesan los grados de libertad en los que se generan fuerzas generalizadas de inercia significativas; es decir, fuerzas
MDOF Dinámica Estructural Aplicada II C 2012 UCA Desde el punto de vista dinámico, interesan los grados de libertad en los que se generan fuerzas generalizadas de inercia significativas; es decir, fuerzas
Mecánica del Vuelo. Tema 3: Actuaciones de Punto. Damián Rivas Rivas y Sergio Esteban Roncero
 Intro Vuelo Sim-PV Mecánica del Vuelo Tema 3: Actuaciones de Punto Damián Rivas Rivas y Sergio Esteban Roncero Departamento de Ingeniería Aeroespacial Escuela Técnica Superior de Ingeniería, Universidad
Intro Vuelo Sim-PV Mecánica del Vuelo Tema 3: Actuaciones de Punto Damián Rivas Rivas y Sergio Esteban Roncero Departamento de Ingeniería Aeroespacial Escuela Técnica Superior de Ingeniería, Universidad
TIPOS DE TURBINA. Coeficientes de potencia para diferentes tipos de turbinas
 TIPOS DE TURBINA Coeficientes de potencia para diferentes tipos de turbinas 1 TIPOS DE TURBINAS Clasificación de acuerdo al eje de rotación Eje vertical Utilizan sustentación, arrastre o una combinación
TIPOS DE TURBINA Coeficientes de potencia para diferentes tipos de turbinas 1 TIPOS DE TURBINAS Clasificación de acuerdo al eje de rotación Eje vertical Utilizan sustentación, arrastre o una combinación
Ingenieria Concurrente Revision II Tema 10
 1 Ingenieria Concurrente Revision II Tema 10 Sergio Esteban Roncero Departamento de Ingeniería Aeroespacial Y Mecánica de Fluidos 2 Revisión de las diferentes áreas Diseño y Sistemas Aerodinámica Estructuras
1 Ingenieria Concurrente Revision II Tema 10 Sergio Esteban Roncero Departamento de Ingeniería Aeroespacial Y Mecánica de Fluidos 2 Revisión de las diferentes áreas Diseño y Sistemas Aerodinámica Estructuras
MÓDULO 1: PERF - PERFORMANCES DE AVIONES (GENERAL) PROGRAMA DE INSTRUCCIÓN Avanzado Teórico Licencia ATPL (V) Virtual + Habil.
 PROGRAMA DE INSTRUCCIÓN Avanzado Teórico Licencia ATPL (V) Virtual + Habil.") PROGRAMA DE INSTRUCCIÓN Avanzado Teórico Licencia ATPL (V) Virtual + Habil. Tipo B737-800 : PERF - Curso homologado por FEDERACIÓ AÈRIA CATALANA: ÍNDICE - PERF ÍNDICE - PERF - PERF.01.1 - Velocidad mínima
PROGRAMA DE INSTRUCCIÓN Avanzado Teórico Licencia ATPL (V) Virtual + Habil. Tipo B737-800 : PERF - Curso homologado por FEDERACIÓ AÈRIA CATALANA: ÍNDICE - PERF ÍNDICE - PERF - PERF.01.1 - Velocidad mínima
MOVIMIENTO ARMÓNICO SIMPLE
 MOVIMIENTO ARMÓNICO SIMPLE Estudio del movimiento armónico simple. Desde el punto de vista dinámico, es el movimiento de una partícula que se mueve sobre una recta, sometida a la acción de una fuerza atractiva
MOVIMIENTO ARMÓNICO SIMPLE Estudio del movimiento armónico simple. Desde el punto de vista dinámico, es el movimiento de una partícula que se mueve sobre una recta, sometida a la acción de una fuerza atractiva