Clasificación de los robots según la AFRI (Asociación Francesa de Robótica Industrial) Manipulador con control manual o telemando.
|
|
|
- Ernesto Poblete Rubio
- hace 5 años
- Vistas:
Transcripción

1 Tabla 1.1 Tipo A Clasificación de los robots según la AFRI (Asociación Francesa de Robótica Industrial) Manipulador con control manual o telemando.


2 Tabla 1.1 Tipo A Tipo B Clasificación de los robots según la AFRI (Asociación Francesa de Robótica Industrial) Manipulador automático con ciclos reajustados ; regulación mediante fines de carrera; control por PLC; acondicionamiento neumático, eléctrico o hidráulico.
3 Tabla 1.1 Tipo A Tipo B Tipo C Clasificación de los robots según la AFRI (Asociación Francesa de Robótica Industrial) Robot programable con trayectoria continua o punto a punto. Carece de conocimientos sobre su entorno.

4 Tabla 1.1 Tipo A Tipo B Tipo C Tipo D Clasificación de los robots según la AFRI (Asociación Francesa de Robótica Industrial) Robot capaz de adquirir datos de su entorno, readaptando su tarea en función de estos.



 y detectar esfuerzos y")
5 Tabla 1.2 1⁰ Generación 2⁰ Generación 3⁰ Generación Clasificación de los robots industriales en generaciones Repite la tarea programada secuencialmente. No toma en cuenta las posibles alteraciones de su entorno. Adquiere información limitada de su entorno y actúa en secuencias. Puede localizar, clasificar (visión) y detectar esfuerzos y adaptar sus movimientos en secuencia. Su programación se realiza mediante el manejo de un lenguaje natural. Posee capacidades para la planificación automática de tareas.

6 Un robot esta formado por una serie de elementos o eslabones unidos mediante articulaciones que permiten un movimiento relativo entre cada dos eslabones consecutivos. Articulaciones: hombro, codo, brazo, muñeca
7 El movimiento de cada articulación puede ser de desplazamiento, de giro o de una combinación de ambos. Cada uno de los movimientos independientes que puede realizar cada articulación con respecto a la anterior, se denomina grado de libertad (GDL). Distintos tipos de articulaciones para robots
8 Que tipos de articulaciones tiene el robot?
9 Que tipos de articulaciones tiene el robot? R
10 El numero de grados de libertad del robot viene dado por la suma de los grados de libertad de las articulaciones que lo componen. De cuantos grados de libertad es el robot?


11 El numero de grados de libertad del robot viene dado por la suma de los grados de libertad de las articulaciones que lo componen. De cuantos grados de libertad es el robot? Es de 6 GDL
12 Las configuraciones de los robots son especificadas por la sucesión de las articulaciones. Por ejemplo un robot con 3 articulaciones prismáticas (P) y tres articulaciones de rotación es especificado por 3P3R. Las siguientes configuraciones son las mas comunes por la posición de la mano del robot:

13 Configuración Cartesiana (3P): La configuración tiene tres articulaciones prismáticas.


14 Configuración Cartesiana (3P)

15 Configuración Cilíndrica (R2P): Esta configuración tiene dos articulaciones prismáticas y una de rotación.
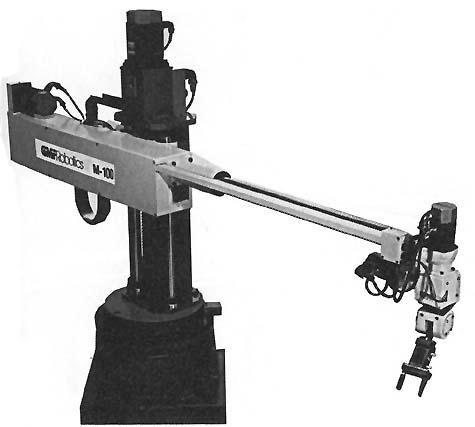

16 Configuración Cilíndrica (R2P)

17 Configuración Esférica (2RP): Esta configuración tiene dos articulaciones de rotación y una prismática.



18 Configuración Esférica (2RP):

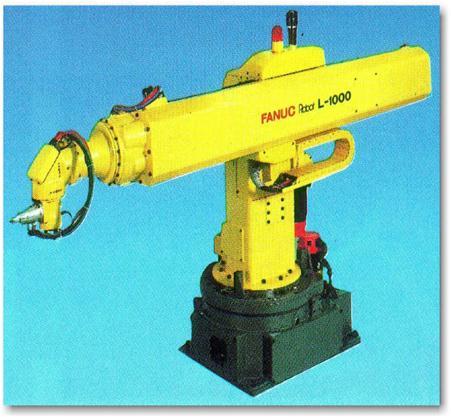
19 Configuración Articulada (3R): Esta configuración tiene 3 articulaciones de rotación, similar a un brazo humano.



20 Configuración Articulada (3R):

21 SCARA (Selective Compliance Assembly Robot Arm): Esta configuración tiene dos articulaciones de rotación que son paralelas y permite al robot moverse en un plano horizontal, además tiene una articulación prismática que le permite movimientos verticales.
Clasificacion de robots
 Clasificacion de robots Robot Industrial Robotica Industrial El campo de la robótica industrial puede definirse como el estudio, diseño y uso de robots para la ejecución de procesos industriales. Más formalmente,
Clasificacion de robots Robot Industrial Robotica Industrial El campo de la robótica industrial puede definirse como el estudio, diseño y uso de robots para la ejecución de procesos industriales. Más formalmente,
TECNOLOGICO NACIONAL DE MEXICO
 TECNOLOGICO NACIONAL DE MEXICO INSTITUTO TECNOLOGICO DE VERACRUZ ROBOTICA CLAVE 9F1A DR. JOSE ANTONIO GARRIDO NATAREN ING. MECATRONICA EQUIPO I UNIDAD I MORFOLOGIA DEL ROBOT 1.2 ESTRUCTURA MECANICA DE
TECNOLOGICO NACIONAL DE MEXICO INSTITUTO TECNOLOGICO DE VERACRUZ ROBOTICA CLAVE 9F1A DR. JOSE ANTONIO GARRIDO NATAREN ING. MECATRONICA EQUIPO I UNIDAD I MORFOLOGIA DEL ROBOT 1.2 ESTRUCTURA MECANICA DE
TEMA 1. INTRODUCCIÓN A LA ROBÓTICA ROBÓTICA
 TEMA 1. INTRODUCCIÓN A LA ROBÓTICA ROBÓTICA ÍNDICE INTRODUCCIÓN CLASIFICACIÓN ESTADÍSTICAS DE LA ROBÓTICA SCORBOT 2 Jon Legarreta / Raquel Martinez INTRODUCCIÓN DEFINICIÓN Según la Robot Industries Association
TEMA 1. INTRODUCCIÓN A LA ROBÓTICA ROBÓTICA ÍNDICE INTRODUCCIÓN CLASIFICACIÓN ESTADÍSTICAS DE LA ROBÓTICA SCORBOT 2 Jon Legarreta / Raquel Martinez INTRODUCCIÓN DEFINICIÓN Según la Robot Industries Association
SECRETARÍA DE EDUCACIÓN PÚBLICA TECNOLÓGICA NACIONAL DE MÉXICO INSTITUTIO TECNOLÓGICO DE VERACRUZ
 SECRETARÍA DE EDUCACIÓN PÚBLICA TECNOLÓGICA NACIONAL DE MÉXICO INSTITUTIO TECNOLÓGICO DE VERACRUZ Robótica Dr. José Antonio Garrido Natarén INGENIERÍA MECATRÓNICA Unidad 1 Morfología del robot 1.8 Grados
SECRETARÍA DE EDUCACIÓN PÚBLICA TECNOLÓGICA NACIONAL DE MÉXICO INSTITUTIO TECNOLÓGICO DE VERACRUZ Robótica Dr. José Antonio Garrido Natarén INGENIERÍA MECATRÓNICA Unidad 1 Morfología del robot 1.8 Grados
Robótica. TEMA 3: ROBOTS MANIPULADORES INDUSTRIALES Martin Mellado
 Robótica TEMA 3: ROBOTS MANIPULADORES INDUSTRIALES Martin Mellado (martin@isa.upv.es) Departamento de Ingeniería de Sistemas y Automática (DISA) Facultad de Informática de Valencia (FIV) Universidad Politécnica
Robótica TEMA 3: ROBOTS MANIPULADORES INDUSTRIALES Martin Mellado (martin@isa.upv.es) Departamento de Ingeniería de Sistemas y Automática (DISA) Facultad de Informática de Valencia (FIV) Universidad Politécnica
Fundamentos de Robótica
 Fundamentos de Robótica Introducción a la cinemática de manipuladores hamontesv@uaemex.mx http://scfi.uaemex.mx/hamontes 1 Recomendación No use estas diapositivas como referencia única de estudio durante
Fundamentos de Robótica Introducción a la cinemática de manipuladores hamontesv@uaemex.mx http://scfi.uaemex.mx/hamontes 1 Recomendación No use estas diapositivas como referencia única de estudio durante
Manipulación. Tarea de manipular con destreza, hacer operaciones con las manos. Es el manejo hábil de los objetos. V. Angélica García Vega
 Manipulación Tarea de manipular con destreza, hacer operaciones con las manos. Es el manejo hábil de los objetos Brazo robótico Manipulador Efector final o pinza Cinemática Estudia las relaciones entre
Manipulación Tarea de manipular con destreza, hacer operaciones con las manos. Es el manejo hábil de los objetos Brazo robótico Manipulador Efector final o pinza Cinemática Estudia las relaciones entre
Robótica Industrial. Puede aumentar la rentabilidad de mi empresa? 12/05/2017. La Robótica en los procesos industriales. Evolución de la industria
 Robótica Industrial Puede aumentar la rentabilidad de mi empresa? Ing. Alberto Kremer Evolución de la industria Automatización Robótica y TI Energía eléctrica Producción en cadena Hiperconectividad Internet
Robótica Industrial Puede aumentar la rentabilidad de mi empresa? Ing. Alberto Kremer Evolución de la industria Automatización Robótica y TI Energía eléctrica Producción en cadena Hiperconectividad Internet
Cinemática del robot
 Cinemática del robot Cinemática del robot La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. La cinemática se interesa por la descripción analítica del movimiento
Cinemática del robot Cinemática del robot La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. La cinemática se interesa por la descripción analítica del movimiento
Robótica Dr. José Antonio Garrido Natarén INGENIERÍA MECATRÓNICA. Unidad 1.- Morfología del robot. 1.2 Estructura mecánica de los robots.
 SECRETARÍA DE EDUCACIÓN PÚBLICA TECNOLÓGICA NACIONAL DE MÉXICO INSTITUTIO TECNOLÓGICO DE VERACRUZ Robótica Dr. José Antonio Garrido Natarén INGENIERÍA MECATRÓNICA Unidad 1.- Morfología del robot 1.2 Estructura
SECRETARÍA DE EDUCACIÓN PÚBLICA TECNOLÓGICA NACIONAL DE MÉXICO INSTITUTIO TECNOLÓGICO DE VERACRUZ Robótica Dr. José Antonio Garrido Natarén INGENIERÍA MECATRÓNICA Unidad 1.- Morfología del robot 1.2 Estructura
CINEMÁTICA Y DINÁMICA DE ROBOTS MANIPULADORES: RESPUESTAS DE EJERCICIOS UNIDAD 01. Roger Miranda Colorado
 CINEMÁTICA Y DINÁMICA DE ROBOTS MANIPULADORES: RESPUESTAS DE EJERCICIOS UNIDAD 01 Roger Miranda Colorado 23 de mayo de 2016 Índice 1. RESPUESTAS DE EJERCICIOS UNIDAD 01 1 1. RESPUESTAS DE EJERCICIOS UNIDAD
CINEMÁTICA Y DINÁMICA DE ROBOTS MANIPULADORES: RESPUESTAS DE EJERCICIOS UNIDAD 01 Roger Miranda Colorado 23 de mayo de 2016 Índice 1. RESPUESTAS DE EJERCICIOS UNIDAD 01 1 1. RESPUESTAS DE EJERCICIOS UNIDAD
Robótica Industrial. ISA.- Ingeniería de Sistemas y Automática TEMA 2: MORFOLOGIA DEL ROBOT. ACTADORES Y SENSORES
 TEMA 2: MORFOLOGIA DEL ROBOT. ACTADORES Y SENSORES Robótica Industrial ISA.- Morfología del Robot 1. Estructura mecánica 2. Transmisiones y reductores 3. Actuadores 4. Sensores internos 5. Elementos terminales
TEMA 2: MORFOLOGIA DEL ROBOT. ACTADORES Y SENSORES Robótica Industrial ISA.- Morfología del Robot 1. Estructura mecánica 2. Transmisiones y reductores 3. Actuadores 4. Sensores internos 5. Elementos terminales
Autómatas y Neuroprótesis
 UNIVERSIDAD NACIONAL DE INGENIERÍA Facultad de Ingeniería Industrial y de Sistemas SECCION POSGRADO Autómatas y Neuroprótesis Docente: Mg. WALTER CASTELLANOS PANTOJA wcastellp@hotmail.com Conceptos Mecanización
UNIVERSIDAD NACIONAL DE INGENIERÍA Facultad de Ingeniería Industrial y de Sistemas SECCION POSGRADO Autómatas y Neuroprótesis Docente: Mg. WALTER CASTELLANOS PANTOJA wcastellp@hotmail.com Conceptos Mecanización
Cinemática del Robot. UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides
 UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. Se interesa por la
UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. Se interesa por la
Cinemática del Robot. CI-2657 Robótica M.Sc. Kryscia Ramírez Benavides
 M.Sc. Kryscia Ramírez Benavides Sistema Robótico Cinemática Dinámica Planeamiento de Tareas Software Hardware Diseño Mecánico Actuadores Sistema de Control Sensores 2 Introducción Con el fin de controlar
M.Sc. Kryscia Ramírez Benavides Sistema Robótico Cinemática Dinámica Planeamiento de Tareas Software Hardware Diseño Mecánico Actuadores Sistema de Control Sensores 2 Introducción Con el fin de controlar
ya que se han desarrollado en diversos campos. En la industria los podemos encontrar en
 CAPÍTULO 1 Antecedentes Actualmente los robots ocupan un aspecto muy importante dentro de la ingeniería ya que se han desarrollado en diversos campos. En la industria los podemos encontrar en una gran
CAPÍTULO 1 Antecedentes Actualmente los robots ocupan un aspecto muy importante dentro de la ingeniería ya que se han desarrollado en diversos campos. En la industria los podemos encontrar en una gran
TSTC. Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 1 INTRODUCCIÓN A LA ROBÓTICA
 Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 1 INTRODUCCIÓN A LA ROBÓTICA Secciones 1. Introducción y definiciones. 2. Visión General de la manipulación mecánica. 1. Posicionamiento y Cinemática
Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 1 INTRODUCCIÓN A LA ROBÓTICA Secciones 1. Introducción y definiciones. 2. Visión General de la manipulación mecánica. 1. Posicionamiento y Cinemática
CINEMÁTICA INVERSA DE ROBOTS INDUSTRIALES
 I EMETRE DE 00 CINEMÁTICA INVERA DE ROBOT INDUTRIALE GERMÁN ANDRÉ RAMO FUENTE * 1. Introducción El uso de robots en ambientes industriales, y más precisamente en procesos de manufactura, ha generado toda
I EMETRE DE 00 CINEMÁTICA INVERA DE ROBOT INDUTRIALE GERMÁN ANDRÉ RAMO FUENTE * 1. Introducción El uso de robots en ambientes industriales, y más precisamente en procesos de manufactura, ha generado toda
Servocontrolado, control de trayectoria. Gestual, textual. Industrial, medico, militar, entretenimiento
 1 ARQUITECTURA Androides, zoomórficos,móviles,poliarticulados NIVEL DE INTELIGENCIA Manejo manual, secuencia arreglada secuencia variable, control numérico, play back, inteligentes METODO DE CONTROL Servocontrolado,
1 ARQUITECTURA Androides, zoomórficos,móviles,poliarticulados NIVEL DE INTELIGENCIA Manejo manual, secuencia arreglada secuencia variable, control numérico, play back, inteligentes METODO DE CONTROL Servocontrolado,
Dr. Roberto Carlos García Gómez
 Dr. Roberto Carlos García Gómez La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. La cinemática se interesa por la descripción analítica del movimiento espacial
Dr. Roberto Carlos García Gómez La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. La cinemática se interesa por la descripción analítica del movimiento espacial
INGENIERÍA EN MECATRONICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE FUNDAMENTOS DE ROBÓTICA INDUSTRIAL
 INGENIERÍA EN MECATRONICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE FUNDAMENTOS DE ROBÓTICA INDUSTRIAL 1. Competencias Desarrollar proyectos de automatización y control, a través del diseño, la administración
INGENIERÍA EN MECATRONICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE FUNDAMENTOS DE ROBÓTICA INDUSTRIAL 1. Competencias Desarrollar proyectos de automatización y control, a través del diseño, la administración
MANUAL DE PRÁCTICAS DE ROBOTICA. PROGRAMA EDUCATIVO:
 1 de 28 DE ROBOTICA. PROGRAMA EDUCATIVO: ING. EN MECATRONICA Calkiní, Campeche, febrero de 2017 Revisó Aprobó Autorizó Presidente de Academia Coordinador del PE Dirección Académica 2 de 28 ÍNDICE CONCEPTO
1 de 28 DE ROBOTICA. PROGRAMA EDUCATIVO: ING. EN MECATRONICA Calkiní, Campeche, febrero de 2017 Revisó Aprobó Autorizó Presidente de Academia Coordinador del PE Dirección Académica 2 de 28 ÍNDICE CONCEPTO
Conceptos de Robótica
 Conceptos de Robótica Seminario de Modelo y Métodos Cuantitativos Teddy Alfaro O. Clasificación de Robot De acuerdo al grado de manejo que tiene una persona tras el robot, éste se puede clasificar como
Conceptos de Robótica Seminario de Modelo y Métodos Cuantitativos Teddy Alfaro O. Clasificación de Robot De acuerdo al grado de manejo que tiene una persona tras el robot, éste se puede clasificar como
TEMA 5 CONTROL Y ROBÓTICA TECNOLOGÍA 3º ESO. Samuel Escudero Melendo
 TEMA 5 CONTROL Y ROBÓTICA TECNOLOGÍA 3º ESO Samuel Escudero Melendo Puffing Billy, H.C. Booth (1901) Robot aspiradora (actualidad) Whirlwind, McGaffey (1868) QUÉ VEREMOS? APROXIMACIÓN HISTORICA ARQUITECTURA
TEMA 5 CONTROL Y ROBÓTICA TECNOLOGÍA 3º ESO Samuel Escudero Melendo Puffing Billy, H.C. Booth (1901) Robot aspiradora (actualidad) Whirlwind, McGaffey (1868) QUÉ VEREMOS? APROXIMACIÓN HISTORICA ARQUITECTURA
Cinemática de los manipuladores. Robótica
 Cinemática de los manipuladores Robótica Introducción Cinemática: Estudio del movimiento sin considerar las fuerzas que lo producen Propiedades geométricas y temporales Posición, velocidad, aceleración,
Cinemática de los manipuladores Robótica Introducción Cinemática: Estudio del movimiento sin considerar las fuerzas que lo producen Propiedades geométricas y temporales Posición, velocidad, aceleración,
Tipos de robots industriales según su aplicación
 8 Tipos de robots industriales según su aplicación Los robots industriales son robots que se emplean para tareas vinculadas con la producción de bienes de origen manufacturado en fabricas o industrias.
8 Tipos de robots industriales según su aplicación Los robots industriales son robots que se emplean para tareas vinculadas con la producción de bienes de origen manufacturado en fabricas o industrias.
Actualmente la automatización de procesos mecánicos, es un ámbito en
 Capítulo 1 Introducción: 1.1 Marco Teórico Actualmente la automatización de procesos mecánicos, es un ámbito en crecimiento, esto ha dado origen a la Mecatrónica, una disciplina que se enfoca a generar
Capítulo 1 Introducción: 1.1 Marco Teórico Actualmente la automatización de procesos mecánicos, es un ámbito en crecimiento, esto ha dado origen a la Mecatrónica, una disciplina que se enfoca a generar
Cinemática del Robot
 Cinemática del Robot La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. En primer término, la cinemática se interesa por la descripción analítica del movimiento
Cinemática del Robot La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. En primer término, la cinemática se interesa por la descripción analítica del movimiento
CAPÍTULO 6: EL ROBOT MANIPULADOR SCORBOT
 Aplicaciones de controlador Bluetooth en Robótica. 1 CAPÍTULO 6: EL ROBOT MANIPULADOR SCORBOT Ahora vamos a documentar el otro elemento clave de nuestro trabajo: el robot manipulador Scorbot. Este modelo
Aplicaciones de controlador Bluetooth en Robótica. 1 CAPÍTULO 6: EL ROBOT MANIPULADOR SCORBOT Ahora vamos a documentar el otro elemento clave de nuestro trabajo: el robot manipulador Scorbot. Este modelo
Robótica Industrial MORFOLOGIA. Índice
 Robótica Industrial MORFOLOGIA La base de estas transparencias han sido preparadas por A. Barrientos como complemento didáctico al libro Fundamentos de Robótica 2ª edición (McGraw-Hill 2007). Algunas diapositivas
Robótica Industrial MORFOLOGIA La base de estas transparencias han sido preparadas por A. Barrientos como complemento didáctico al libro Fundamentos de Robótica 2ª edición (McGraw-Hill 2007). Algunas diapositivas
FUNDAMENTOS DE ROBÓTICA INDUSTRIAL HOJA DE ASIGNATURA CON DESGLOSE DE UNIDADES TEMÁTICAS
 HOJA DE ASIGNATURA CON DESGLOSE DE UNIDADES TEMÁTICAS 1. Nombre de la asignatura Optativa I Fundamentos de Robótica Industrial 2. Competencia(s) a la(s) que contribuye la asignatura Desarrollar proyectos
HOJA DE ASIGNATURA CON DESGLOSE DE UNIDADES TEMÁTICAS 1. Nombre de la asignatura Optativa I Fundamentos de Robótica Industrial 2. Competencia(s) a la(s) que contribuye la asignatura Desarrollar proyectos
Síntesis de la programación
 Síntesis de la programación Robótica industrial 2º ARI 22 de febrero de 2017 Tabla de Contenidos 1. Secuenciación de contenidos...1 2. Unidades de trabajo...2 2.1. Programación de una estación para fabricación
Síntesis de la programación Robótica industrial 2º ARI 22 de febrero de 2017 Tabla de Contenidos 1. Secuenciación de contenidos...1 2. Unidades de trabajo...2 2.1. Programación de una estación para fabricación
PROYECTO DOCENTE ASIGNATURA: "Control y Programación de Robots" Grupo: Grupo 1(882067) Titulacion: INGENIERO INDUSTRIAL (Plan 98) Curso:
 Titulacion: INGENIERO INDUSTRIAL (Plan 98) Curso:") PROYECTO DOCENTE ASIGNATURA: "Control y Programación de Robots" Grupo: Grupo 1(882067) Titulacion: INGENIERO INDUSTRIAL (Plan 98) Curso: 2013-2014 DATOS BÁSICOS DE LA ASIGNATURA/GRUPO Titulación: Año del
PROYECTO DOCENTE ASIGNATURA: "Control y Programación de Robots" Grupo: Grupo 1(882067) Titulacion: INGENIERO INDUSTRIAL (Plan 98) Curso: 2013-2014 DATOS BÁSICOS DE LA ASIGNATURA/GRUPO Titulación: Año del
INGENIERÍA PROFESIONAL EN INOCUIDAD ALIMENTARIA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ROBÓTICA
 INGENIERÍA PROFESIONAL EN INOCUIDAD ALIMENTARIA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ROBÓTICA UNIDADES DE APRENDIZAJE 1. Competencias Automatizar procesos de producción mediante la implementación
INGENIERÍA PROFESIONAL EN INOCUIDAD ALIMENTARIA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ROBÓTICA UNIDADES DE APRENDIZAJE 1. Competencias Automatizar procesos de producción mediante la implementación
2015, Año del Generalísimo José María Morelos y Pavón
 Nombre de la Asignatura: ROBOTICA Línea de Investigación o Trabajo: PROCESAMIENTO DE SEÑALES ELECTRICAS Y ELECTRONICAS Tiempo de dedicación del estudiante a las actividades de: DOC-TIS-TPS-CRÉDITOS 48
Nombre de la Asignatura: ROBOTICA Línea de Investigación o Trabajo: PROCESAMIENTO DE SEÑALES ELECTRICAS Y ELECTRONICAS Tiempo de dedicación del estudiante a las actividades de: DOC-TIS-TPS-CRÉDITOS 48
Selección de un Robot Industrial. Prof. J. Milland
 Prof. J. Milland Si debemos robotizar un determinado proceso, debemos seleccionar el robot mas adecuado teniendo en consideración los servicios y el costo. Las características que debemos estar estudiando
Prof. J. Milland Si debemos robotizar un determinado proceso, debemos seleccionar el robot mas adecuado teniendo en consideración los servicios y el costo. Las características que debemos estar estudiando
INSTITUTO TECNOLÓGICO DE VERACRUZ RESUMEN DE LA UNIDAD II: PROGRAMACION DE ROBOTS
 INSTITUTO TECNOLÓGICO DE VERACRUZ CARRERA: INGENIERIA MECATRÓNICA CATEDRATICO: DR. JOSÉ ANTONIO GARRIDO NATARÉN RESUMEN DE LA UNIDAD II: PROGRAMACION DE ROBOTS MATERIA: ROBOTICA GRUPO: 9F1B EQUIPO 1 CURIE
INSTITUTO TECNOLÓGICO DE VERACRUZ CARRERA: INGENIERIA MECATRÓNICA CATEDRATICO: DR. JOSÉ ANTONIO GARRIDO NATARÉN RESUMEN DE LA UNIDAD II: PROGRAMACION DE ROBOTS MATERIA: ROBOTICA GRUPO: 9F1B EQUIPO 1 CURIE
Datos del alumno. Nombre: Saavedra Perea Omar Matricula: Correo electrónico: Firma. Datos de los asesores.
 Licenciatura en Ingeniería Mecánica. Nombre del Proyecto de Integración (PI): Implementación del control de movimiento para un Brazo Robot Cilíndrico. Modalidad: Proyecto Tecnológico Versión: Primera Trimestre
Licenciatura en Ingeniería Mecánica. Nombre del Proyecto de Integración (PI): Implementación del control de movimiento para un Brazo Robot Cilíndrico. Modalidad: Proyecto Tecnológico Versión: Primera Trimestre
Tema: Morfología de Robots. Tiempo de ejecución: 2 hrs.
 1 Facultad: Ingeniería. Escuela: Electrónica Asignatura: Fundamentos de Robótica Lugar de ejecución: icim Lab. Edificio 3. Primera planta. Tema: Morfología de Robots. Tiempo de ejecución: 2 hrs. Objetivo
1 Facultad: Ingeniería. Escuela: Electrónica Asignatura: Fundamentos de Robótica Lugar de ejecución: icim Lab. Edificio 3. Primera planta. Tema: Morfología de Robots. Tiempo de ejecución: 2 hrs. Objetivo
Cinemática Directa del Robot. CI-2657 Robótica M.Sc. Kryscia Ramírez Benavides
 M.Sc. Kryscia Ramírez Benavides Introducción Consiste en determinar cual es la posición y orientación del extremo final del robot, con respecto a un sistema de coordenadas que se toma como referencia,
M.Sc. Kryscia Ramírez Benavides Introducción Consiste en determinar cual es la posición y orientación del extremo final del robot, con respecto a un sistema de coordenadas que se toma como referencia,
INSTITUTO TECNOLÓGICO DE VERACRUZ. Materia: Robótica. Unidad 3: Cinemática. Tema: Cinemática Inversa. Catedrático: Dr. José Antonio Garrido Natarén
 INSTITUTO TECNOLÓGICO DE VERACRUZ Materia: Robótica Unidad 3: Cinemática Tema: Cinemática Inversa Catedrático: Dr. José Antonio Garrido Natarén H. Veracruz, Ver. Noviembre de 2014 La cinemática del robot
INSTITUTO TECNOLÓGICO DE VERACRUZ Materia: Robótica Unidad 3: Cinemática Tema: Cinemática Inversa Catedrático: Dr. José Antonio Garrido Natarén H. Veracruz, Ver. Noviembre de 2014 La cinemática del robot
TÉCNICO SUPERIOR EN AUTOMATIZACIÓN Y ROBÓTICA INDUSTRIAL 1. Actualización LOE:
 TÉCNICO SUPERIOR EN AUTOMATIZACIÓN Y ROBÓTICA INDUSTRIAL 1. Actualización LOE: Lo dispuesto en el Real Decreto 1581/2011, de 4 de noviembre, por el que se establece el Título de Técnico Superior en Automatización
TÉCNICO SUPERIOR EN AUTOMATIZACIÓN Y ROBÓTICA INDUSTRIAL 1. Actualización LOE: Lo dispuesto en el Real Decreto 1581/2011, de 4 de noviembre, por el que se establece el Título de Técnico Superior en Automatización
PARÁMETROS DE DENAVIT-HARTENBERG. Cristina Castejón
 PARÁMETROS DE DENAVIT-HARTENBERG Cristina Castejón Conceptos de robótica Cadena cinemática abierta formada por eslabones y articulaciones: Rotación Prismáticas Estudio cinemático Estudio dinámico Conceptos
PARÁMETROS DE DENAVIT-HARTENBERG Cristina Castejón Conceptos de robótica Cadena cinemática abierta formada por eslabones y articulaciones: Rotación Prismáticas Estudio cinemático Estudio dinámico Conceptos
DISEÑO E IMPLEMENTACIÓN DE UN BRAZO ROBOT PARA DISCAPACITADOS
 TRABAJO FIN DE GRADO EN INGENIERÍA EN TECNOLOGÍAS INDUSTRIALES DISEÑO E IMPLEMENTACIÓN DE UN BRAZO ROBOT PARA DISCAPACITADOS AUTOR: JAVIER MARTÍNEZ BEA TUTOR: RANKO ZOTOVIC STANISIC Curso Académico: 2015-16
TRABAJO FIN DE GRADO EN INGENIERÍA EN TECNOLOGÍAS INDUSTRIALES DISEÑO E IMPLEMENTACIÓN DE UN BRAZO ROBOT PARA DISCAPACITADOS AUTOR: JAVIER MARTÍNEZ BEA TUTOR: RANKO ZOTOVIC STANISIC Curso Académico: 2015-16
ROBOTICA por OLLERO BATURONE Editorial Marcombo. Foreword Prólogo Prefacio del autor
 ROBOTICA por OLLERO BATURONE Editorial Marcombo Foreword Prólogo Prefacio del autor CAPÍTULO 1. Introducción 1.1. Robótica 1.2. Esquema general del sistema robot 1.3. Robots manipuladores 1.3.1. Sistema
ROBOTICA por OLLERO BATURONE Editorial Marcombo Foreword Prólogo Prefacio del autor CAPÍTULO 1. Introducción 1.1. Robótica 1.2. Esquema general del sistema robot 1.3. Robots manipuladores 1.3.1. Sistema
Contenido. Prefacio... Acerca de los autores...
 Contenido Prefacio... Acerca de los autores... xi xvi Capítulo 1. Introducción... 1 1.1. Antecedentes históricos... 2 1.2. Origen y desarrollo de la robótica... 8 1.3. Definición del Robot... 16 1.3.1.
Contenido Prefacio... Acerca de los autores... xi xvi Capítulo 1. Introducción... 1 1.1. Antecedentes históricos... 2 1.2. Origen y desarrollo de la robótica... 8 1.3. Definición del Robot... 16 1.3.1.
Robótica Dr. José Antonio Garrido Natarén INGENIERÍA MECATRÓNICA. Unidad 1.- Morfología del robot. 1.7 Tipos y características de robots.
 SECRETARÍA DE EDUCACIÓN PÚBLICA TECNOLÓGICA NACIONAL DE MÉXICO INSTITUTIO TECNOLÓGICO DE VERACRUZ Robótica Dr. José Antonio Garrido Natarén INGENIERÍA MECATRÓNICA Unidad 1.- Morfología del robot 1.7 Tipos
SECRETARÍA DE EDUCACIÓN PÚBLICA TECNOLÓGICA NACIONAL DE MÉXICO INSTITUTIO TECNOLÓGICO DE VERACRUZ Robótica Dr. José Antonio Garrido Natarén INGENIERÍA MECATRÓNICA Unidad 1.- Morfología del robot 1.7 Tipos
ANALISIS CINEMATICO DIRECTO E INVERSO
 ANALISIS CINEMATICO DIRECTO E INVERSO Cinematica directa x=f(q) [x,y,z] Articulaciones Posicion de la Herramienta Cinematica Inversa q=f -1 (x) El analisis cinematico inverso nos permite calcular la posicion
ANALISIS CINEMATICO DIRECTO E INVERSO Cinematica directa x=f(q) [x,y,z] Articulaciones Posicion de la Herramienta Cinematica Inversa q=f -1 (x) El analisis cinematico inverso nos permite calcular la posicion
ROBÓTICA I. Cinemática Directa
 Cinemática Directa M. C. Jorge Luis Barahona Avalos 2 de mayo de 2012 Universidad Tecnológica de la Mixteca Instituto de Electrónica y Mecatrónica 1 / 42 Índice General 1 Cinemática Directa 2 Cadena Cinemática
Cinemática Directa M. C. Jorge Luis Barahona Avalos 2 de mayo de 2012 Universidad Tecnológica de la Mixteca Instituto de Electrónica y Mecatrónica 1 / 42 Índice General 1 Cinemática Directa 2 Cadena Cinemática
Universidad Tecnológica Nacional Facultad Regional Buenos Aires Grupo de Inteligencia Artificial y Robótica. Seminario IA y R
 1 Brazo Robótico 5AR Fernando Carmona, Damián De Biase, Elias Da Ponte Página 1 de 14 Resumen -En los robots móviles destinados a tareas de exploración y/o manipulación de objetos peligrosos, es esencial
1 Brazo Robótico 5AR Fernando Carmona, Damián De Biase, Elias Da Ponte Página 1 de 14 Resumen -En los robots móviles destinados a tareas de exploración y/o manipulación de objetos peligrosos, es esencial
Clasificación de robots. Clasificación de robots. Universidad Autónoma de Guerrero Unidad Académica de Ingeniería
 Clasificación de robots Introducción a la robótica Sesión 2: Locomoción Eric Rodríguez Peralta En la actualidad los más comunes son: Robots manipuladores Limitación para moverse en su entorno Robots móviles
Clasificación de robots Introducción a la robótica Sesión 2: Locomoción Eric Rodríguez Peralta En la actualidad los más comunes son: Robots manipuladores Limitación para moverse en su entorno Robots móviles
Estructura Básica de un Simulador para la Síntesis y el Análisis Dinámico de Manipuladores Investigación Científica Tecnológica
 Estructura Básica de un Simulador para la Síntesis y el Análisis Dinámico de Manipuladores Investigación Científica Tecnológica Dr. Carlos Sánchez López, M.C. Carlos Humberto Saucedo Zárate Departamento
Estructura Básica de un Simulador para la Síntesis y el Análisis Dinámico de Manipuladores Investigación Científica Tecnológica Dr. Carlos Sánchez López, M.C. Carlos Humberto Saucedo Zárate Departamento
Percepción visual aplicada a la robótica
 Percepción visual aplicada a la robótica Mario I. Chacón Murguía Rafael Sandoval Rodríguez Javier Vega Pineda Selecciona el libro para empezar Capítulo 2 Teoría de robótica Continuar Cinemática de robots
Percepción visual aplicada a la robótica Mario I. Chacón Murguía Rafael Sandoval Rodríguez Javier Vega Pineda Selecciona el libro para empezar Capítulo 2 Teoría de robótica Continuar Cinemática de robots
Cinemática Directa. Facultad de Cs. de la Computación. Juan Carlos Conde Ramírez. Computer Animation
 Cinemática Directa Facultad de Cs. de la Computación Juan Carlos Conde Ramírez Computer Animation Contenido 1 Introducción 2 Transformaciones homogéneas 3 Cinemática directa 4 Método Denavit-Hartenberg
Cinemática Directa Facultad de Cs. de la Computación Juan Carlos Conde Ramírez Computer Animation Contenido 1 Introducción 2 Transformaciones homogéneas 3 Cinemática directa 4 Método Denavit-Hartenberg
CINEMÁTICA DEL ROBOT
 CINEMÁTICA DEL ROBOT Cinemática Directa Cinemática Inversa Matriz Jacobiana 1 Problema cinemático del robot Cinemática del robot: Estudio de su movimiento con respecto a un sistema de referencia: Descripción
CINEMÁTICA DEL ROBOT Cinemática Directa Cinemática Inversa Matriz Jacobiana 1 Problema cinemático del robot Cinemática del robot: Estudio de su movimiento con respecto a un sistema de referencia: Descripción
CAPÍTULO 1 INTRODUCCIÓN. 1.1 Motivación y objetivos
 CAPÍTULO 1 INTRODUCCIÓN En este Capítulo se presentará una visión general del proyecto, la motivación para realizar este proyecto y una representación del estado del control de brazos robóticos actualmente.
CAPÍTULO 1 INTRODUCCIÓN En este Capítulo se presentará una visión general del proyecto, la motivación para realizar este proyecto y una representación del estado del control de brazos robóticos actualmente.
CAPÍTULO IV RESULTADOS DE LA INVESTIGACIÓN. Para dar cumplimiento con el capítulo IV, los resultados de la
 CAPÍTULO IV RESULTADOS DE LA INVESTIGACIÓN Para dar cumplimiento con el capítulo IV, los resultados de la investigación, se consideraron una serie de fases, que ayudaran a describir el modelo matemático
CAPÍTULO IV RESULTADOS DE LA INVESTIGACIÓN Para dar cumplimiento con el capítulo IV, los resultados de la investigación, se consideraron una serie de fases, que ayudaran a describir el modelo matemático
Control de Robots Manipuladores
 NOMBRE DE LA ASIGNATURA: BENEMÉRITA UNIVERSIDAD AUTÓNOMA DE PUEBLA FACULTAD DE CIENCIAS DE LA ELECTRÓNICA PROGRAMA DE ESTUDIOS DE LA MAESTRÍA EN CIENCIAS DE LA ELECTRÓNICA CON OPCIÓN EN AUTOMATIZACIÓN
NOMBRE DE LA ASIGNATURA: BENEMÉRITA UNIVERSIDAD AUTÓNOMA DE PUEBLA FACULTAD DE CIENCIAS DE LA ELECTRÓNICA PROGRAMA DE ESTUDIOS DE LA MAESTRÍA EN CIENCIAS DE LA ELECTRÓNICA CON OPCIÓN EN AUTOMATIZACIÓN
CAPITULO I... 1 INTRODUCCION ANTECEDENTES Y ORIGENES DE LA ROBOTICA LEYES PARA LA ROBOTICA... 4
 C O N T E N I D O Prólogo... i CAPITULO I... 1 INTRODUCCION... 1 1.1. ANTECEDENTES Y ORIGENES DE LA ROBOTICA... 2 1.2. LEYES PARA LA ROBOTICA... 4 1.3. ARQUITECTURAS DE LOS ROBOTS... 5 1.3.1. POLIARTICULADOS...
C O N T E N I D O Prólogo... i CAPITULO I... 1 INTRODUCCION... 1 1.1. ANTECEDENTES Y ORIGENES DE LA ROBOTICA... 2 1.2. LEYES PARA LA ROBOTICA... 4 1.3. ARQUITECTURAS DE LOS ROBOTS... 5 1.3.1. POLIARTICULADOS...
diseño y construcción de máquinas capaces de desempeñar tareas realizadas por el ser humano o que requieren del uso de inteligencia.
 ROBÓTICA Conceptos Básicos Conceptos Básicos Robótica. Ciencia o rama de la tecnología, que estudia el diseño y construcción de máquinas capaces de desempeñar tareas realizadas por el ser humano o que
ROBÓTICA Conceptos Básicos Conceptos Básicos Robótica. Ciencia o rama de la tecnología, que estudia el diseño y construcción de máquinas capaces de desempeñar tareas realizadas por el ser humano o que
Ingeniería de Sistemas y Automática Robótica y Visión Artificial TEMA 1: INTRODUCCIÓN. Robótica Industrial. ISA.- Ingeniería de Sistemas y Automática
 TEMA 1: INTRODUCCIÓN Robótica Industrial ISA.- Introducción 1. Definición de robot industrial 2. Antecedentes de la robótica 3. Origen y desarrollo de la robótica 4. clasificación del robot Robot = trabajo
TEMA 1: INTRODUCCIÓN Robótica Industrial ISA.- Introducción 1. Definición de robot industrial 2. Antecedentes de la robótica 3. Origen y desarrollo de la robótica 4. clasificación del robot Robot = trabajo
PRÓLOGO PREFACIO... 21
 ÍNDICE PRÓLOGO... 17 PREFACIO... 21 CAPÍTULO 1. ENTORNO ACTUAL Y PERSPECTIVAS... 27 1.1 ORGANIZACIÓN DE UN SISTEMA ROBÓTICO... 29 1.2 ENTORNOS MATLAB Y SIMULINK... 31 1.3 TENDENCIAS EN ROBÓTICA Y MECATRÓNICA...
ÍNDICE PRÓLOGO... 17 PREFACIO... 21 CAPÍTULO 1. ENTORNO ACTUAL Y PERSPECTIVAS... 27 1.1 ORGANIZACIÓN DE UN SISTEMA ROBÓTICO... 29 1.2 ENTORNOS MATLAB Y SIMULINK... 31 1.3 TENDENCIAS EN ROBÓTICA Y MECATRÓNICA...
Cinemática inversa del robot 4 gdl
 obótica y Visión por Computador - UMH Práctica 2 Cinemática inversa del robot gdl Ejemplo Solución del robot cilíndrico de grados de libertad En este caso particular, la solución geométrica es inmediata.
obótica y Visión por Computador - UMH Práctica 2 Cinemática inversa del robot gdl Ejemplo Solución del robot cilíndrico de grados de libertad En este caso particular, la solución geométrica es inmediata.
Robótica I ACB Participantes Comité para el Diseño de Especialidad de la DIET. Academia de Sistemas Digitales de la DIET
 1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica I Ingeniería Electrónica ACB - 0802 4 0 8 2. HISTORIA DEL PROGRAMA. Lugar
1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica I Ingeniería Electrónica ACB - 0802 4 0 8 2. HISTORIA DEL PROGRAMA. Lugar
o3r lrc Licenciatura en Ingeniería mecánica de un brazo Versión: Primera Trimestre lectivo: Matricula: Asesor: Dr. Miguel Magos Rivera
 Licenciatura en Ingeniería mecánica Diseño y construcción de un prototipo de la estructura mecánica SCARA para uso didáctico. de un brazo o3r lrc Modalidad : Proyecto tecnológ ico Versión: Primera Trimestre
Licenciatura en Ingeniería mecánica Diseño y construcción de un prototipo de la estructura mecánica SCARA para uso didáctico. de un brazo o3r lrc Modalidad : Proyecto tecnológ ico Versión: Primera Trimestre
SUBSECRETARIA DE EDUCACIÓN SUPERIOR TECNOLÓGICO NACIONAL DE MEXICO INSTITUTO TECNOLOGICO DE VERACRUZ. Robótica
 SUBSECRETARIA DE EDUCACIÓN SUPERIOR TECNOLÓGICO NACIONAL DE MEXICO INSTITUTO TECNOLOGICO DE VERACRUZ Robótica PROGRAMACION DE ROBOTS TITULAR DE LA MATERIA DR. JOSÉ ANTONIO GARRIDO NATARÉN Veracruz Ver
SUBSECRETARIA DE EDUCACIÓN SUPERIOR TECNOLÓGICO NACIONAL DE MEXICO INSTITUTO TECNOLOGICO DE VERACRUZ Robótica PROGRAMACION DE ROBOTS TITULAR DE LA MATERIA DR. JOSÉ ANTONIO GARRIDO NATARÉN Veracruz Ver
Mech-Tech College. Egberto Hernández. Website: Autor: Ing.
 Mech-Tech College Egberto Hernández E-mail: Prof.Ehernandez@hotmail.com Website: http://profehernandez.weebly.com Autor: Ing. Ángel Alicea Autor: Ing. Ángel Alicea Historia Fase 1 1950, Lab ARGONNE disena
Mech-Tech College Egberto Hernández E-mail: Prof.Ehernandez@hotmail.com Website: http://profehernandez.weebly.com Autor: Ing. Ángel Alicea Autor: Ing. Ángel Alicea Historia Fase 1 1950, Lab ARGONNE disena
INTRODUCCION A LOS MECANISMOS
 INTRODUCCION A LOS MECANISMOS 1 INTRODUCCION Poseer conocimientos de la topología de las máquinas (tipos, formas, usos de los componentes de las máquinas y sobre sus mecanismos y subsistemas constituyentes)
INTRODUCCION A LOS MECANISMOS 1 INTRODUCCION Poseer conocimientos de la topología de las máquinas (tipos, formas, usos de los componentes de las máquinas y sobre sus mecanismos y subsistemas constituyentes)
Universidad Nacional de San Juan
 Universidad Nacional de San Juan Facultad de Ingeniería Departamento de Electrónica, Automática y Bioingeniería Carrera de Bioingeniería Asignatura Biomecánica Unidad Nº 2: Biomecánica Postural Parte 1:
Universidad Nacional de San Juan Facultad de Ingeniería Departamento de Electrónica, Automática y Bioingeniería Carrera de Bioingeniería Asignatura Biomecánica Unidad Nº 2: Biomecánica Postural Parte 1:
Robótica I ACF Participantes Comité para el Diseño de Especialidad de la DIET. Academia de Sistemas Digitales de la DIET
 1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica II Ingeniería Electrónica ACF - 080 2 8 2. HISTORIA DEL PROGRAMA. Lugar
1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica II Ingeniería Electrónica ACF - 080 2 8 2. HISTORIA DEL PROGRAMA. Lugar
9. Dispositivos electrónicos de un robot no programado. 10. Estructura de la robótica programada. Placa Arduino.
 1. Concepto de robot. 2. Características de un robot. 3. Clasificación de los robots. 4. Arquitectura de un robot. 5. Elementos mecánicos de un robot. 6. Características de un robot. 7. Sensores y captadores.
1. Concepto de robot. 2. Características de un robot. 3. Clasificación de los robots. 4. Arquitectura de un robot. 5. Elementos mecánicos de un robot. 6. Características de un robot. 7. Sensores y captadores.
Robótica aplicada con labview y lego
 Robótica aplicada con labview y lego Pedro Ponce Cruz Víctor M. de la Cueva Hernández Hiram Ponce Espinosa Selecciona la imagen para entrar Capítulo 1 Introducción a la robótica Continuar Introducción
Robótica aplicada con labview y lego Pedro Ponce Cruz Víctor M. de la Cueva Hernández Hiram Ponce Espinosa Selecciona la imagen para entrar Capítulo 1 Introducción a la robótica Continuar Introducción
Capacitación Tecnológica Científica para Bolivia. Introducción al modelado de robots
 Catecbol Capacitación Tecnológica Científica para Bolivia www.catecbol.com facebook.com/catecbol @catecbol catecbol@gmail.com Introducción al modelado de robots Ronald Terrazas Mallea Bélgica La unión
Catecbol Capacitación Tecnológica Científica para Bolivia www.catecbol.com facebook.com/catecbol @catecbol catecbol@gmail.com Introducción al modelado de robots Ronald Terrazas Mallea Bélgica La unión
ESTÁNDAR DE COMPETENCIA
 I.- Datos Generales Código EC0972 Título Programación del robot industrial Propósito del Estándar de Competencia Servir como referente para la evaluación y certificación de las personas que ejercen la
I.- Datos Generales Código EC0972 Título Programación del robot industrial Propósito del Estándar de Competencia Servir como referente para la evaluación y certificación de las personas que ejercen la
Control y programación de robots
 Control y programación de robots 11. Solución cinemática inversa y directa de robots seriales 11.1 El alumno, tras recibir y estudiar esta clase, debe ser capaz de: Comprender el modelado de la cinemática
Control y programación de robots 11. Solución cinemática inversa y directa de robots seriales 11.1 El alumno, tras recibir y estudiar esta clase, debe ser capaz de: Comprender el modelado de la cinemática
CÁLCULO DE CAMINO ÓPTIMO PARA MANIPULADOR ARTICULADO SCARA SUJETO A OBSTÁCULOS
 CÁLCULO DE CAMINO ÓPTIMO PARA MANIPULADOR ARTICULADO SCARA SUJETO A OBSTÁCULOS Carlos Pillajo cpillajo@ups.edu.ec Agenda : Planteamiento del Problema Introducción Planificación de Caminos Cálculo del Espacio
CÁLCULO DE CAMINO ÓPTIMO PARA MANIPULADOR ARTICULADO SCARA SUJETO A OBSTÁCULOS Carlos Pillajo cpillajo@ups.edu.ec Agenda : Planteamiento del Problema Introducción Planificación de Caminos Cálculo del Espacio
Firma. Firma. Nombre del proyecto de integración (PI): Diseño, construcción y control de un brazo robótico de 5 grados de libertad.
: Diseño, construcción y control de un brazo robótico de 5 grados de libertad.") Nombre del proyecto de integración (PI): Diseño, construcción y control de un brazo robótico de 5 grados de libertad. Modalidad: Proyecto tecnológico. Versión: Segunda Trimestre Lectivo: 18 P Alumnos:
Nombre del proyecto de integración (PI): Diseño, construcción y control de un brazo robótico de 5 grados de libertad. Modalidad: Proyecto tecnológico. Versión: Segunda Trimestre Lectivo: 18 P Alumnos:
Capítulo 1. Introducción. 1.1 Antecedentes
 Capítulo 1 Introducción Durante los últimos años se han visto con asombro el desarrollo de sistemas capaces de realizar tareas donde la seguridad del ser humano es fundamental. Así mismo, los avances tecnológicos
Capítulo 1 Introducción Durante los últimos años se han visto con asombro el desarrollo de sistemas capaces de realizar tareas donde la seguridad del ser humano es fundamental. Así mismo, los avances tecnológicos
Robótica. Tema 5.- Robots no programables.
 1. Automatismos.Son mecanismos con diferentes dispositivos destinados al control y regulación de un sistema sin la intervención del ser humano. Un sistema automático es, por ejemplo, un robot. Robot, etimológicamente
1. Automatismos.Son mecanismos con diferentes dispositivos destinados al control y regulación de un sistema sin la intervención del ser humano. Un sistema automático es, por ejemplo, un robot. Robot, etimológicamente
Firma. Firma. Nombre del proyecto de integración (PI): Diseño, construcción y control de un brazo robótico de 5 grados de libertad.
: Diseño, construcción y control de un brazo robótico de 5 grados de libertad.") Nombre del proyecto de integración (PI): Diseño, construcción y control de un brazo robótico de 5 grados de libertad. Modalidad: Proyecto tecnológico. Versión: Primera Trimestre Lectivo: 18 P Alumnos:
Nombre del proyecto de integración (PI): Diseño, construcción y control de un brazo robótico de 5 grados de libertad. Modalidad: Proyecto tecnológico. Versión: Primera Trimestre Lectivo: 18 P Alumnos:
ROBÓTICA I. Cinemática Directa
 Cinemática Directa M. C. Jorge Luis Barahona Avalos 11 de abril de 2011 Universidad Tecnológica de la Mixteca Instituto de Electrónica y Mecatrónica 1 / 34 Índice General 1 Cinemática Directa 2 Cadena
Cinemática Directa M. C. Jorge Luis Barahona Avalos 11 de abril de 2011 Universidad Tecnológica de la Mixteca Instituto de Electrónica y Mecatrónica 1 / 34 Índice General 1 Cinemática Directa 2 Cadena
AUTOR: NELSON ALDAZ DISEÑO E IMPLEMENTACIÓN DE UN CONTROLADOR MEDIANTE SOFTWARE LIBRE PARA EL MANIPULADOR SCORBOT-ER III DE 5 GRADOS DE LIBERTAD
 AUTOR: NELSON ALDAZ DISEÑO E IMPLEMENTACIÓN DE UN CONTROLADOR MEDIANTE SOFTWARE LIBRE PARA EL MANIPULADOR SCORBOT-ER III DE 5 GRADOS DE LIBERTAD Latacunga, 2016 AGENDA Objetivo Marco Teórico Diseño e implementación
AUTOR: NELSON ALDAZ DISEÑO E IMPLEMENTACIÓN DE UN CONTROLADOR MEDIANTE SOFTWARE LIBRE PARA EL MANIPULADOR SCORBOT-ER III DE 5 GRADOS DE LIBERTAD Latacunga, 2016 AGENDA Objetivo Marco Teórico Diseño e implementación
TEMA 1. INTRODUCCIÓN DEFINICIÓN ANTECEDENTES CLASIFICACIÓN ESTADÍSTICAS DE LA ROBÓTICA SCORBOT. 2 Raquel Martinez / Jon Legarreta
 TEMA 1. INTRODUCCIÓN ROBÓTICA Índice DEFINICIÓN ANTECEDENTES CLASIFICACIÓN ESTADÍSTICAS DE LA ROBÓTICA SCORBOT 2 Raquel Martinez / Jon Legarreta Definición i ió Robota = trabajo realizado de manera forzada
TEMA 1. INTRODUCCIÓN ROBÓTICA Índice DEFINICIÓN ANTECEDENTES CLASIFICACIÓN ESTADÍSTICAS DE LA ROBÓTICA SCORBOT 2 Raquel Martinez / Jon Legarreta Definición i ió Robota = trabajo realizado de manera forzada
PRÁCTICAS VÍA INTERNET Célula de Clasificación
 PRÁCTICAS VÍA INTERNET Célula de Clasificación Robot ABB Realizado: Laboratorio Remoto de Automática (LRA-ULE) Versión: Páginas: Grupo SUPPRESS (Supervisión, Control y Automatización) Universidad de León
PRÁCTICAS VÍA INTERNET Célula de Clasificación Robot ABB Realizado: Laboratorio Remoto de Automática (LRA-ULE) Versión: Páginas: Grupo SUPPRESS (Supervisión, Control y Automatización) Universidad de León
11 de septiembre de 2017
 I. Mecanismos Universidad Politécnica de Guanajuato 11 de septiembre de 2017 Se puede definir el estudio de los mecanismos como la parte del diseño de máquinas que se interesa del diseño cinemático de
I. Mecanismos Universidad Politécnica de Guanajuato 11 de septiembre de 2017 Se puede definir el estudio de los mecanismos como la parte del diseño de máquinas que se interesa del diseño cinemático de
Asignatura MECATRÓNICA
 Mecánica PAG: 1 Universidad Central de Venezuela Facultad de Escuela de Mecánica Departamento de Automática Unidad Docente Automática Asignatura Mecánica PAG: 2 1. PROPÓSITO La asignatura Mecatrónica tiene
Mecánica PAG: 1 Universidad Central de Venezuela Facultad de Escuela de Mecánica Departamento de Automática Unidad Docente Automática Asignatura Mecánica PAG: 2 1. PROPÓSITO La asignatura Mecatrónica tiene
Mecánica para Robótica
 Mecánica para Robótica Material de clase: http://www.robotica-up.org/ Education Mechanics for Robotics Conceptos básicos de mecanismos y ensambles Cuerpo rígido (o sólido indeformable): Cuerpo o materia
Mecánica para Robótica Material de clase: http://www.robotica-up.org/ Education Mechanics for Robotics Conceptos básicos de mecanismos y ensambles Cuerpo rígido (o sólido indeformable): Cuerpo o materia
8º CONGRESO IBEROAMERICANO DE INGENIERIA MECANICA Cusco, 23 al 25 de Octubre de 2007
 8º CONGRESO IBEROAMERICANO DE INGENIERIA MECANICA Cusco, 23 al 25 de Octubre de 2007 PROYECTO Y CONSTRUCCIÓN DE UN ROBOT DE TRES GRADOS DE LIBERTAD PARA USO ACADÉMICO CON CARACTERÍSTICAS INDUSTRIALES Ing
8º CONGRESO IBEROAMERICANO DE INGENIERIA MECANICA Cusco, 23 al 25 de Octubre de 2007 PROYECTO Y CONSTRUCCIÓN DE UN ROBOT DE TRES GRADOS DE LIBERTAD PARA USO ACADÉMICO CON CARACTERÍSTICAS INDUSTRIALES Ing
Robótica Industrial. Robótica Industrial
 TEMA 4: CINEMÁTICA DEL ROBOT Ingeniería de Sistemas y Automática Control de Robots y Sistemas Sensoriales Robótica Industrial Robótica Industrial ISA.- Ingeniería de Sistemas y Automática Cinemática del
TEMA 4: CINEMÁTICA DEL ROBOT Ingeniería de Sistemas y Automática Control de Robots y Sistemas Sensoriales Robótica Industrial Robótica Industrial ISA.- Ingeniería de Sistemas y Automática Cinemática del
Robótica Mecanización, Automatización y Robotización Robótica y robots... 3
 Robótica... 2 Mecanización, Automatización y Robotización... 2 Robótica y robots... 3 Definiciones de robot... 3 Funcionamiento de un robot... 4 Entradas o Sensores... 5 Salidas o actuadores... 6 Realimentación...
Robótica... 2 Mecanización, Automatización y Robotización... 2 Robótica y robots... 3 Definiciones de robot... 3 Funcionamiento de un robot... 4 Entradas o Sensores... 5 Salidas o actuadores... 6 Realimentación...
o5r lta 0ñ Dt Licenciatura en Ingeniería mecánica Versión: Segunda Trimestre lectivo: Asesor: Dr. Miguel Magos Rivera
 o5r lta Licenciatura en Ingeniería mecánica Diseño y construcción de la estructura mecánica de un brazo SCARA para uso didáctico. Modalidad : Proyecto tecnológ ico Versión: Segunda Trimestre lectivo: 1
o5r lta Licenciatura en Ingeniería mecánica Diseño y construcción de la estructura mecánica de un brazo SCARA para uso didáctico. Modalidad : Proyecto tecnológ ico Versión: Segunda Trimestre lectivo: 1
La versión digital de esta tesis está protegida por la Ley de Derechos de Autor del Ecuador.
 La versión digital de esta tesis está protegida por la Ley de Derechos de Autor del Ecuador. Los derechos de autor han sido entregados a la ESCUELA POLITÉCNICA NACIONAL bajo el libre consentimiento del
La versión digital de esta tesis está protegida por la Ley de Derechos de Autor del Ecuador. Los derechos de autor han sido entregados a la ESCUELA POLITÉCNICA NACIONAL bajo el libre consentimiento del
Máquinas y Mecanismos:
 Dpto. Física y Mecánica Máquinas y Mecanismos: Análisis topológico Elvira Martínez Ramírez Nomenclatura. Mecanismos y máquinas Mecanismo es la combinación de cuerpos resistentes conectados por articulaciones
Dpto. Física y Mecánica Máquinas y Mecanismos: Análisis topológico Elvira Martínez Ramírez Nomenclatura. Mecanismos y máquinas Mecanismo es la combinación de cuerpos resistentes conectados por articulaciones
ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA INFORMÁTICA. Grado en Ingeniería de Computadores SIMULADOR CINEMÁTICO DE UN ROBOT MANIPULADOR INDUSTRIAL
 ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA INFORMÁTICA Grado en Ingeniería de Computadores SIMULADOR CINEMÁTICO DE UN ROBOT MANIPULADOR INDUSTRIAL KINEMATIC SIMULATOR OF AN INDUSTRIAL ROBOT ARM Realizado por
ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA INFORMÁTICA Grado en Ingeniería de Computadores SIMULADOR CINEMÁTICO DE UN ROBOT MANIPULADOR INDUSTRIAL KINEMATIC SIMULATOR OF AN INDUSTRIAL ROBOT ARM Realizado por
CAPÍTULO II MARCO TEÓRICO. 1- Antecedentes de la Investigación. Para la realización de este proyecto se indagaron una serie de
 CAPÍTULO II MARCO TEÓRICO 1- Antecedentes de la Investigación Para la realización de este proyecto se indagaron una serie de investigaciones relacionadas con el mismo, que ayudaron de una u otra forma
CAPÍTULO II MARCO TEÓRICO 1- Antecedentes de la Investigación Para la realización de este proyecto se indagaron una serie de investigaciones relacionadas con el mismo, que ayudaron de una u otra forma
Las áreas de investigación sobre el Tratamiento de imágenes digitales se centran en la
 1 CAPITULO I 1.1 INTRODUCCIÓN Las áreas de investigación sobre el Tratamiento de imágenes digitales se centran en la manipulación y obtención de información gráfica, con gran diversidad en aplicaciones
1 CAPITULO I 1.1 INTRODUCCIÓN Las áreas de investigación sobre el Tratamiento de imágenes digitales se centran en la manipulación y obtención de información gráfica, con gran diversidad en aplicaciones