Int. Cl. 6 : A43D 25/06
|
|
|
- Valentín Navarrete Páez
- hace 8 años
- Vistas:
Transcripción
1 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: k Número de solicitud: k Int. Cl. 6 : A43D 2/06 B2J 13/08 B2J 9/02 k 12 SOLICITUD DE PATENTE A1 22 kfecha de presentación: k Solicitante/s: UNIVERSIDAD DE MURCIA Avda. Teniente Flomesta, s/n, Edif. Convalecencia, 3 ā planta Murcia, ES k 43 Fecha de publicación de la solicitud: k 72 Inventor/es: Tomás Balibrea, Luis Manuel y Mateo Aroca, Antonio k 43 Fecha de publicación del folleto de la solicitud: k 74 Agente: Ungría López, Javier k 4 Título: Robot con visión artificial para encolado automático de suelas de zapato. ES A1 k 7 Resumen: Robot con visión artificial para encolado automático de suelas de zapato. Cuenta con un manipulador cartesiano de tres ejes (7) dotado de una pistola de encolado (8) y adyacente a una superficie de trabajo (2) donde se ubica la suela a encolar (3). Bajo dicha superficie (2) hay un sistema de iluminación (4) y sobre ella hay una cámara () conectada a una tarjeta de adquisición de imágenes (10) que a su vez conecta con una unidad de control (11). La unidad de control (11) conecta además con una tarjeta de control de motores (12) que a través de amplificadores (14) hace moverse al manipulador (7) según las coordenadas y trayectorias definidas por la tarjeta de adquisición de imágenes (10) y correspondientes al contorno de la suela (3). Venta de fascículos: Oficina Española de Patentes y Marcas. C/Panamá, Madrid

2 1 ES A1 2 DESCRIPCION Robot con visión artificial para encolado automático de suelas de zapato. Objeto de la invención La presente invención, tal y como se expresa en el enunciado de esta memoria descriptiva, se refiere a un robot con visión artificial para encolado automático de suelas de zapatos, cuya finalidad consiste en facilitar la arquitectura de un sistema manipulador cartesiano de tres ejes que posibilite la automatización de la actual fase de encolado manual de suelas de zapato. Para conseguir este objetivo, el sistema o robot incorpora tecnología de visión por computador al objeto de posibilitar la detección del contorno de la suela, ubicada en una posición indeterminada del área de trabajo del manipulador, generando automáticamente la trayectoria que deberá seguir el elemento terminal del referido manipulador, constituido por una pistola de encolado. El sistema es fácilmente reconfigurable, permitiendo un amplio abanico de posibilidades, además del encolado automático de suelas de calzado, ya que se trata de un sistema versátil para todas aquellas aplicaciones en las que tan solo se requiera un movimiento bi o tridimensional sobre un plano. La reconfiguración de la aplicación además de la lógica sustitución del elemento terminal apropiado, requerirá de unas mínimas modificaciones, al efecto de ser aplicable a operaciones tales como fresado, taladrado, dosificación, pegado, seguimiento de trayectorias, etc. Antecedentes de la invención Tradicionalmente, las suelas de zapato se han encolado manualmente utilizando operarios especializados, con un tiempo excesivo en dicha operación de encolado. La utilización de mano de obra humana, además del coste de la misma, genera encolados no uniformes, lo que deriva en productos de calidad variable. Con el objeto de automatizar este tipo de procesos se han desarrollado máquinas que, mediante una programación previa de la trayectoria a seguir, adaptada a un modelo y talla de suela, permiten el encolado automático. Estas máquinas tienen el inconveniente de que la suela siempre debe estar colocada en una posición fija, ya que el sistema no es capaz de corregir las diferencias de ubicación de la misma con respecto a la suela patrón con la que fue programado. Además requiere que el operario, para cada suela, indique el modelo y talla para la aplicación del programa de trayectorias, que deberá haber sido generado con carácter previo. Por otra parte, se conocen diversos robots que realizan diferentes tareas industriales, pero las características que presentan no permiten su aplicación al encolado de suelas de zapatos. Descripción de la invención Para lograr los objetivos y evitar los inconvenientes indicados en anteriores apartados, la invención consiste en un robot con visión artificial para encolado automático de suelas de zapato en el que se pueden distinguir tres módulos diferenciados: -Sistemadevisión por computador para la detección de la posición y el contorno de las suelas de zapato. - Estructura electro-mecánica que configura un manipulador cartesiano de tres ejes. - Sistema de control de posición y generación de trayectorias del manipulador cartesiano. Mediante la utilización del sistema de visión por computador, integrado por una tarjeta de adquisición de imágenes, una cámara CCD, y un sistema de iluminación adecuado, se consigue, utilizando técnicas de visión, detectar loscontornos de las suelas situadas sobre una superficie traslúcida embebida en el área de trabajo del robot o manipulador cartesiano. El sistema de visión por computador genera un conjunto de coordenadas correspondientes al plano X-Y, que posteriormente serán enviadas al sistema de control del manipulador. El sistema de control del manipulador, con el conjunto de coordenadas obtenidas, generará la trayectoria que deberá seguir el elemento terminal de la estructura electro-mecánica que configura el manipulador cartesiano, es decir la pistola de encolado, realizando el encolado de la suela. El sistema se encuentra controlado por un computador personal, ejecutándose sobre el mismo un software específico desarrollado para esta aplicación. Los elementos que componen el sistema son los siguientes: - Manipulador o robot cartesiano de tres ejes, construido mediante guías de desplazamiento lineal, accionadas por motores de contínua, con realimentación de posición a través de encoders por pulsos en cuadratura. - Tarjeta de control de motores con bus PC, que permite la ejecución de un control de un mínimo de tres motores de contínua, disponiendo de funciones de interpolación y programación. - Servo-drives, esto es amplificadores de potencia para actuación directa sobre los motores de las guías lineales de desplazamiento, mediante técnicas de modulación PWM. - Sistema de alimentación de los servo-drives. - Tarjeta de adquisición de imágenes. -Cámara de visión CCD, monocromo, con sistema de iluminación a contraluz. - Sensor de guiado del eje Z del manipulador al efecto de mantener una distancia constante, en la fase de encolado, entre la pistola y la suela. - Y unidad de control, constituida en base a un computador personal, que integra la tarjeta de adquisición de imágenes y la tarjeta de control de motores, así como todo el software específicamente desarrollado para esta aplicación. La construcción del manipulador cartesiano se basa en un conjunto de tres módulos-guías de desplazamiento lineal que, mediante el ensamblaje adecuado de las mismas, conforman un manipulador cartesiano de tres ejes. La unión de los diferentes módulos-guías de desplazamiento lineal que forman el manipulador robot cartesiano se realiza utilizando una escuadra de unión para los ejes X e Y, realizándose la colocación del eje Z directamente sobre los puntos de unión que dispone la guía de desplazamiento correspondiente al eje Y. El elemento terminal del manipulador estará constituido por una pistola de encolado.

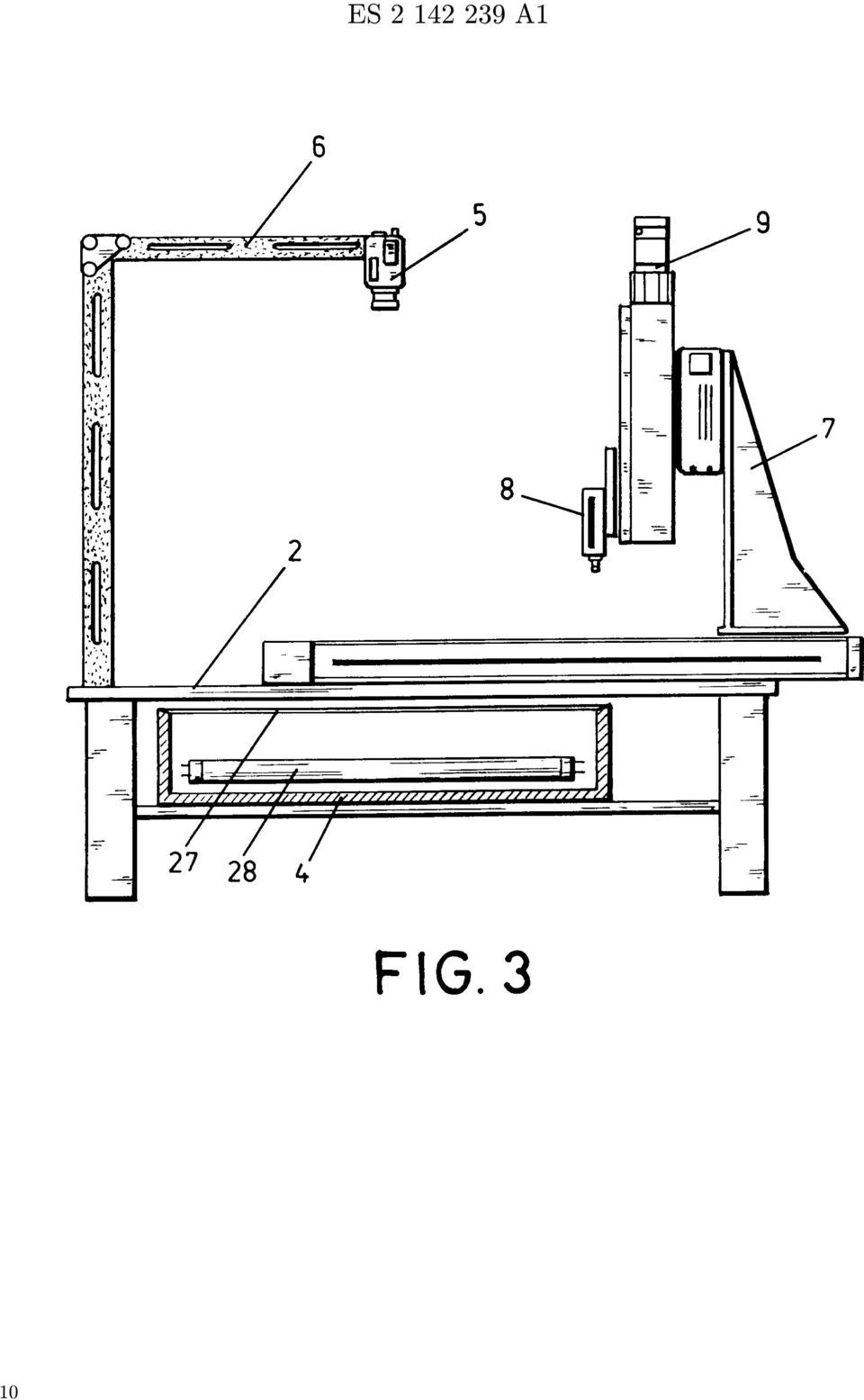
3 3 ES A1 4 El control de posicionamiento de los motores de las guías lineales del sistema utiliza una tarjeta de control de motores encargada de la transformación, para cada eje, de las coordenadas de la trayectoria proporcionada por el sistema de visión, generando una señal de mando para los servo-drives amplificadores. Dicha tarjeta de control de motores proporciona varios modos de movimiento, entre los que se incluyen, posicionamiento punto a punto, interpolación lineal y circular, posicionamiento simultáneo y coordinado de varios ejes, posicionamiento mediante vector, secuencias de movimiento múltiple y suavizado de trayectoria, trayectorias definidas por el usuario, etc. Dispone a suvezdeunconjuntodeentradasysalidaspara el control y referencia de los eventos externos que constituyen el sistema. La tarjeta de control de motores utiliza como señales de realimentación, para cada eje, las procedentes de los encoders de posición de cada uno de los módulos de desplazamiento lineal, finales de carrera y sensores de actuación en el eje Z. Se utilizan tres elementos servo-drives amplificadores, uno por eje, que se encargan de convertir la señal de mando procedente de la tarjeta de control de motores en la señal de potencia necesaria para el funcionamiento de los motores, siendo el valor de la señal de potencia función de la magnitud de la señal de mando. El sistema de alimentación de los servo-drives amplificadores es el encargado de suministrar la energía eléctrica adecuada a dichos amplificadores para su alimentación. En función del tipo de drives-amplificador que se utilice, puede estar formada por un sistema de alimentación trifásica alterna (AC) o por un sistema de alimentación contínua no regulada (DC). La tarjeta de adquisición de imágenes tiene por objeto realizar la adquisición de imágenes de las suelas captadas por una cámara CCD. Dicha tarjeta será la encargada, utilizando técnicas de visión artificial, de generar las coordenadas de las trayectorias de los puntos que configuran el contornodelasuela. Laimagencaptadaporlacámara CCD entra en un proceso de transformación que comienza con la segmentación de la imagen. En esta operación se realiza la identificación del objeto (suela) colocada en el área de trabajo con respecto al fondo de imagen. A continuación se obtiene el contorno del objeto (suela) mediante la aplicación del algoritmo de Papert. Las coordenadas de este contorno, debidamente transformadas del sistema de coordenadas de la cámara al sistema de coordenadas del robot, se almacenan en memoria. La cámara CCD, posicionada en un eje perpendicular al plano X-Y, tiene su campo de visión en el área de trabajo del manipulador y está situada sobre el sistema de iluminación, siendo su misión la captación de las imágenes de las suelas ubicadas en dicha zona de trabajo. Dado que se requiere obtener la silueta de una suela, se utilizará retro-iluminación difusa, obteniéndose la imagen del objeto (suela) sobre el fondo de un cristal traslúcido iluminado por su parte inferior. El sensor de desplazamiento del eje Z, esto es desplazamiento en altura, se encarga del guiado automático del eje Z del manipulador, en la fase de encolado, al efecto de mantener una distancia constante entre la suela y la pistola terminal de encolado, compensando las modificaciones en altura que pudiera experimentar la suela y que el sistema de visión no detectaría al no ser capaz de obtener la tercera dimensión. Finalmente, la unidad de control se encuentra constituida por un ordenador o computador personal, preferentemente del tipo Pentium 200 MHz. Sobre este ordenador se integran la tarjeta de adquisición de imágenes y la tarjeta de control de motores referidas anteriormente, así como todos los programas específicamente desarrollados para esta aplicación. Estos programas o software realizarán el control de las operaciones de captación y tratamiento de imágenes que se obtengan mediante el sistema de visión y de las operaciones relativas al control de los parámetros que definen las trayectorias que realiza el robot cartesiano. Con esta configuración que se ha descrito el sistema o robot de la invención presenta un funcionamiento en el que se pueden distinguir las siguientes ocho etapas consecutivas: -Captación con la cámara CCD de la imagen del área de trabajo; - Almacenamiento de la imagen en la tarjeta de adquisición de imágenes; - Aplicación de los algoritmos de obtención del contorno y coordenadas del mismo; -Grabación de las coordenadas del contorno en memoria o fichero; - Extracción de las coordenadas almacenadas e introducción en la tarjeta de control de motores; - Transformación de las coordenadas en la secuencia de movimiento correspondiente a la trayectoria que definen; - Inicio de la ejecución de la secuencia de movimiento del manipulador cartesiano adaptándose al nivel Z correspondiente a la suela de calzado; y - Finalización de la operación de seguimiento y posicionamiento del robot en el origen del área de trabajo. Hay que indicar que el presente robot o sistema, aunque está diseñado para su aplicación al encolado de suelas de zapatos, se puede aplicar a otras tareas tales como fresado, taladrado, dosificación, etc, cambiando la pistola de encolado por el elemento terminal que corresponda y efectuando pequeñas y oportunas variaciones en los programas de la unidad de control. A continuación, para facilitar una mejor comprensión de esta memoria descriptiva y formando parte integrante de la misma, se acompañan unas figuras en las que con carácter ilustrativo y no limitativo se ha representado el objeto de la invención. Breve descripción de las figuras Figura 1.- Representa esquemáticamente un diagrama de bloques de un robot con visión artificial para encolado automático de suelas de zapato, realizado según la presente invención. Figura 2.- Representa esquemáticamente las etapas de trabajo del robot referido en la anterior figura 1. Figura 3.- Representa una vista en alzado del manipulador cartesiano, la cámara y el sistema 3

4 ES A1 6 de iluminación incluidos en el robot referido en las anteriores figuras. Figura 4.- Representa una vista de perfil de los mismos elementos aludidos en la anterior figura 3. Figura.- Representa una vista en perspectiva del sistema de iluminación empleado en las anteriores figuras 3 y 4 y perteneciente al robot de la presente invención. Descripción de un ejemplo de realización de la invención Seguidamente se realiza una descripción de un ejemplo de la invención, haciendo referencia a la numeración adoptada en las figuras. Así, el robot con visión artificial para encolado automático de suelas de zapato de este ejemplo de realización presenta una zona de trabajo 1 que incluye una mesa o superficie de trabajo translúcida 2 sobre la que se dispone de manera aleatoria una suela a encolar 3. Bajo esta superficie de trabajo 2 hay un sistema de iluminación 4 que proporciona una iluminación a contraluz; y sobre la superficie de trabajo 2 se dispone una cámara de vídeo de tipo CCD y monocroma, ubicada en un soporte 6 y enfocada de manera que recoge la imagen de toda la superficiedetrabajo2. Adyacentemente a la mesa de trabajo 2 hay un robot propiamente dicho o manipulador cartesiano de tres ejes 7 construido con guías de desplazamiento lineal accionadas por motores de contínua y con realimentación de posición a través de encoders por pulsos en cuadratura. Este manipulador 7 incluye un elemento terminal constituido por una pistola de encolado 8 que será la que aplique la cola o pegamento sobre la suela 3. El manipulador 7 dispone además de un sensor 9 de guiado del eje Z, esto es, del desplazamiento en altura del manipulador 7. Este sensor 9 permite mantener una distancia constante durante el encolado, entre la pistola 8 y la suela 3. La cámara conecta con una tarjeta de adquisición de imágenes 10 ubicada ya fuera de la zona de trabajo 1. Esta tarjeta 10 es la encargada de generar las coordenadas de las trayectorias de los puntos que configuran el contorno de la suela 3. La tarjeta de adquisición de imágenes 10 conecta a su vez con una unidad de control 11 constituida en base a un ordenador personal de tipo Pentium 200 MHz. La tarjeta 10 recibe la imagen de la cámara, la segmenta y obtiene el contorno de la suela 3 mediante el algoritmo de Papert. Las coordenadas de este contorno son transformadas a coordenadas correspondientes al manipulador 7 y almacenadas en memoria. La unidad de control 11 conecta además con el sensor 9 de guiado del eje Z y con una tarjeta de control 12 de motores del manipulador 7. Esta tarjeta de control de motores 12 permite el control de al menos tres motores de contínua y dispone de funciones de interpolación y programación. Latarjeta12transformaparacadaejedelmanipulador 7 las coordenadas de la trayectoria proporcionada por la tarjeta de adquisición de imágenes 10, generando una señal de mando 13 que se aplica a unos servo-drives o amplificadores que proporcionan las señales de potencia o ataque 1 a los motores del manipulador 7. La tarjeta 12 proporciona varios modos de movimiento, entre los que se incluyen posicionamiento punto a punto, interpolación lineal y circular, posicionamiento simultáneo y coordinado de varios ejes, posicionamiento mediante vector, secuencias de movimiento múltiple y suavizado de trayectorias, trayectorias definidas por el usuario, etc. Dispone además la tarjeta 12 de entradas y salidas para el control y referencia de los eventos externos que constituyen el sistema. A la tarjeta de control de motores 12 le llegan además señales de realimentación 16 procedentes de los encoders de posición de cada uno de los ejes del manipulador 7 y señales de fin de carrera 17 de dichos ejes. Los amplificadores o servo-drives 14 conectan además con un bloque de alimentación específico 18 que se encarga de suministrarles la energía necesaria para su funcionamiento. En la unidad de control 11, además del ordenador Pentium de 200 MHz y de los programas específicamente desarrollados para la aplicación, se integran la tarjeta de adquisición de imágenes 10 y la tarjeta de control de motores 12. Los programas de la unidad de control 11 realizan el control de las operaciones de captación y tratamiento de imágenes que se obtienen del sistema de visión, así como el control de las operaciones relativas al control de los parámetros que definen las trayectorias que realiza el manipulador 7. Con la configuración que se ha descrito el trabajo del robot de la invención, coordinado por la unidad de control 11, puede estructurarse en las siguientes ocho etapas (19 a 26): - Una primera etapa 19 de captación con la cámaradelaimagendelasuperficiedetrabajo2. - Una segunda etapa 20 de almacenamiento de la imagen captada mediante la primera etapa en la tarjeta de adquisición de imágenes Una tercera etapa 21 de aplicación de los algoritmos de obtención del contorno y de las coordenadas de la imagen almacenada en la segunda etapa. - Una cuarta etapa 22 de grabación de las coordenadas del contorno obtenidas mediante la tercera etapa en memoria o fichero. - Una quinta etapa 23 de extracción de las coordenadas grabadas mediante la cuarta etapa, introduciéndolas en la tarjeta de control de motores Una sexta etapa 24 de transformación de las referidas coordenadas en una secuencia de movimiento correspondiente a la trayectoria que definen. -Unaséptima etapa 2 de inicio de la ejecución de la secuencia de movimiento del manipulador 7, efectuando la aplicación de cola en la suela 3 mediante la pistola 8 y adaptándose al nivel Z o altura correspondiente a la suela 3. - Una octava etapa 26 de finalización de la operación de seguimiento y de posicionamiento del manipulador 7 en el origen de coordenadas de lasuperficiedetrabajo2. A continuación se aportan las características técnicas de los elementos empleados en este ejemplo de realización de la invención. 4

5 7 ES A1 8 Las características y prestaciones genéricas de los módulos que forman el manipulador 7 son: - Potencias medias de avance y mecanizado, en función de los materiales que vayan a ser objeto de procesado (plástico, madera, metal ligero...). - Equipados con servomotores de contínua. - Encoders de posición. - Interruptores de fin de carrera. - Robustez y sellado de elementos de acuerdo a condiciones de ambientes industriales extremos. - Velocidades de desplazamiento mínimas de 2 cm/seg, en función del paso de husillo. - Bloque de amarre para elementos de actuación. Las características particulares de cada guía elemento utilizada en el manipulador 7 son las siguientes: Eje X: - Longitud total 992 mm - Longitud útil 640 mm - Husillo de bolas con paso de mm -Velocidadmáxima2cm/segparaelpaso de mm. Se consiguen velocidades más elevadas utilizando valores de paso mayores (10, 20 mm) - Encoder con resolución 8000 puntos/cm -Servomotordecontínua de 120W integrado en el perfil. Eje Y: - Longitud total 92 mm - Longitud útil 20 mm - Husillo de bolas con paso de mm -Velocidadmáxima2cm/segparaelpaso de mm. Se consiguen velocidades más elevadas utilizando valores de paso mayores (10, 20 mm) - Encoder con resolución de 8000 puntos/cm -Servomotordecontínua de 120W integrado en el perfil. Eje Z: - Longitud total 406 mm - Longitud útil 10 mm - Husillo de bolas con paso de 2, mm - Velocidad máxima 12, cm/seg para el paso de 2, mm. Se consiguen velocidades más elevadas utilizando valores de paso mayores (, 10, 20 mm) - Encoder con resolución de puntos/cm -Servomotordecontínua de 120W - Bloque de amarre formado por placa de ranuras en T. La unión de los diferentes módulos-guía de desplazamiento lineal que forman el manipulador robot cartesiano se realiza utilizando una escuadra de unión par los ejes X e Y, realizándose la colocación del eje Z directamente sobre los puntos de unión que dispone la guía de desplazamiento correspondiente al eje Y. La tarjeta de control de motores 12 tiene las siguientes características: -Instalación en PC- Bus AT. - Flexibilidad y versatilidad de funciones. - Funciones de interpolación y de programación. -Señal de mando de alta resolución: 14 bits - Filtro digital de compensación con posibilidad de programación de parámetros. - Entradas de encoder de alta velocidad 8 MHz - Posibilidad de comunicación a través de interrupciones de Bus. - Memoria no volátil para almacenamiento de parámetros y programas de control. - Posibilidad de diferentes modos de movimiento. - Entradas de control analógicas digitales para eventos externos. Las principales especificaciones técnicas de la tarjeta de control 12 utilizada son: - Ciclo del lazo del servo: 37 seg. - Precisión de posición: ± 1 pulsos en cuadratura. - Rango de posicionamiento ± pulsos/movimiento continuo. - Rango de velocidades: hasta pulsos/segundo. - Aceleración/Deceleración: a pulsos/s 2. -Límite de error: ± pulsos. - Constantes de filtro: K p : 0 a 1023,87; K d : 0 a 409,87; K i : 0 a 2047,87. -Resolución de señal de mando: 14 bits 0,0012V. -Número de variables: 24. -Tamaño de array: 8000 elementos en más de 3 arrays. -Tamaño de memoria: 1000 líneas x 80 caracteres. - Requerimientos de alimentación: + V; 70 ma + 12V; 40 ma - 12V; 40 ma Las características y prestaciones genéricas de los módulos drives-amplificadores 14 utilizados son los siguientes: -Operación regenerativa en los cuatro cuadrantes para máximo rendimiento. - Control para motores con escobillas (tipo Brush). - Etapa de control de salida mediante técnicas PWM para minimizar las perdidas de potencia. - Circuitos de protección contra: sobretensión, limitación de corriente (nominal y máxima). Las características particulares de los módulos servo-drives o amplificadores 14 utilizados son las siguientes: - Intensidades de suministro nominal/máxima 8/16 Amp. -Tensión de alimentación variable entre 3-9 Vac. -Tensión de control de los motores variable en función de la tensión de alimentación con valores comprendidos entre Vdc. -Entradas para señales de encoders. - Potenciómetros de ajuste de parámetros como son: velocidad, offset, K p,k d. Por la tipología de los drives-amplificadores 14 utilizados, el bloque de alimentación 18 emplea una alimentación trifásica alterna (AC), basado en un transformador con las siguientes características: - Configuración trifásica triángulo/triángulo. -Relación de transformación 380/9. - Potencia 1,4 kva. La tarjeta de adquisición de imágenes 10 tiene las siguientes características genéricas: - Procesador especializado que permite tratamiento de datos en tiempos pequeños.

6 9 ES A Memoria de imágenes capaz de almacenar la totalidad de puntos de la imagen captada. Siendo las especificaciones de dicha tarjeta de adquisición de imágenes 10 utilizada las siguientes: - Conmutador digital (Keyer Digital). - Controlador de grabación. - Interface de memoria con el PC de control -Memoriadevídeo configurable a los valores 12 x 12, 12 x 1024, 1024 x Tablas de tratamiento de imágenes (LUT). Las características genéricas de la cámara tipo CCD son: - Resistencia a golpes y vibraciones. -Señal de salida PAL. - Optica con distancia focal adecuada a la aplicación. Siendo las características específicas de la cámara utilizada las siguientes: - Optica de 1/2 con distancia focal de 6 mm. -Tamaño de imagen: 681 (H) x 82 (V) pixels. - Frecuencias horizontal-vertical: 1.62 khz 0 Hz. -Resolución horizontal: 430 líneas. -Iluminación mínima: 3 lux.con F1,4 y 0,9 lux con F0,7. - Velocidad de obturación variable entre: 1/ / El sistema de iluminación 4 se encuentra ubicado bajo la superficie de trabajo 2 del manipulador y está constituido por una superficie traslúcida 27 de plástico de 3mm, difusora de la iluminación, con dimensiones 700 x 300mm. Bajo esta superficie 27 se han dispuesto tres tubos fluorescentes 28 de 220V/40W/0Hz y los equipos auxiliares de encendido y cebado 29 de los mismos. Las características genéricas del sensor 9 del eje Z del manipulador 7 son: - Salida de indicación de nivel a través de señal analógica. - Medición de desplazamiento entre 3 y 60 cm. -Variación mínima de medición ante variaciones de color del elemento sobre el que se realiza la medida. Las características específicas del sensor 9 utilizado son: - Alimentación 24V,DC. - Consumo de corriente <48mA, - Frecuencia de conmutación 10Hz. -Variaciónde la señal de salida en función del color: %. -Señal de salida por tensión (0-10v) o por corriente (4-20mA)

7 11 ES A1 12 REIVINDICACIONES 1. Robot con visión artificial para encolado automático de suelas de zapato, que posibilita la automatización de la fase de encolado manual de suelas de zapato (3); caracterizado porque cuenta con un manipulador cartesiano de tres ejes (7) que presenta como elemento terminal una pistola de encolado (8) y que es adyacente a una superficie translúcida de trabajo (2) donde se coloca la suela a encolar (3); existiendo bajo dicha superficie (2) medios de iluminación (4) y existiendo sobre la misma superficie (2) medios de captación de imagen asociados a medios de tratamiento de imagen que conectan con una unidad de control (11); conectando además dicha unidad de control (11) con medios de control del manipulador (7); de manera que en función de la silueta o imagen captada sobre la superficie de trabajo (2) se genera una trayectoria determinante del movimiento de la pistola de encolado (8) sobre la suela (3). 2. Robot con visión artificial para encolado automático de suelas de zapato, según reivindicación 1, caracterizado porque el manipulador cartesiano de tres ejes (7) está constituido mediante guías de desplazamiento lineal accionadas por motores de contínua y con realimentación de posición a través de encoders por pulsos en cuadratura. 3. Robot con visión artificial para encolado automático de suelas de zapato, según reivindicaciones 1 y 2, caracterizado porque dichos medios de control del manipulador (7) consisten en una tarjeta de control de motores (12) conectada a la unidad de control (11) y que proporciona unas señales de mando (13) a unos amplificadores servo-drives (14) que generan señales de potencia (1) que actúan sobre los motores del manipulador (7); recibiendo la tarjeta de control de motores (12) señales de realimentación (16) de la disposición de los ejes del manipulador (7) provinientes de los encoders, así comoseñales de realimentación de finales de carrera (17) de dichos ejes; estando conectados además dichos amplificadores servo-drives (14) a un bloque de alimentación específico (18) que les proporciona la energía para su funcionamiento. 4. Robot con visión artificial para encolado automático de suelas de zapato, según reivindicación 1, caracterizado porque dichos medios de captación de imagen consisten en una cámara () de tipo CCD y monocroma, que está dispuesta en un soporte (6) y enfocada de manera que recoge la imagen de toda la superficie de trabajo (2).. Robot con visión artificial para encolado automático de suelas de zapato, según reivindicación 1, caracterizado porque dichos medios de tratamiento de imagen consisten en una tarjeta de adquisición de imágenes (10) que segmenta la imagen recibida de los medios de captación de imagen y genera las coordenadas de las trayectorias de los puntos que configuran el contorno de la suela a encolar (3). 6. Robot con visión artificial para encolado automático de suelas de zapato, según reivindicación 1, caracterizado porque el manipulador (7) cuenta con un sensor (9) de guiado del desplazamiento en altura, conectado a la unidad de control (11), al objeto de mantener una distancia constante durante el correspondiente encolado entre la pistola (8) y la suela a encolar (3). 7. Robot con visión artificial para encolado automático de suelas de zapato, según reivindicaciones 1, 2 y 4, caracterizado porque la unidad de control (11) se configura mediante un ordenador personal que integra la tarjeta de control de motores (12), la tarjeta de adquisición de imágenes (10) y los programas específicos de aplicación. 8. Robot con visión artificial para encolado automático de suelas de zapato, según reivindicación 1, caracterizado porque el sistema de iluminación (4) consiste en una superficie traslúcida (27) bajo la que se han dispuesto unos tubos fluorescentes (28) y los equipos de encendido y cebado (29) de dichos tubos (28). 9. Robot con visión artificial para encolado automático de suelas de zapato, según reivindicación 1, caracterizado porque la pistola de encolado (8) del manipulador (7) es susceptible de sustituirse por otros elementos terminales tales como taladradoras, fresadoras, dosificadoras y similares; siendo además la suela (3) susceptible de sustituirse por otro elemento a tratar, con lo que se amplía considerablemente el campo de aplicación del robot. 10. Robot con visión artificial para encolado automático de suelas de zapato, según reivindicaciones anteriores, caracterizado porque presenta un funcionamiento estructurado en las siguientes etapas: - una primera etapa (19) de captación con la cámara () de la imagen de la superficie de trabajo (2); - una segunda etapa (20) de almacenamiento de la imagen captada mediante la primera etapa (19) en la tarjeta de adquisición de imágenes (10); - una tercera etapa (21) de aplicación de algoritmos de obtención del contorno y de las coordenadas de la imagen almacenada en la segunda etapa (20); - una cuarta etapa (22) de grabación de las coordenadas del contorno obtenidas mediante la tercera etapa (21) en memoria o fichero de la unidad de control (11); - una quinta etapa (23) de extracción de las coordenadas grabadas mediante la cuarta etapa (22), introduciéndolas en la tarjeta de control de motores (12); - una sexta etapa (24) de transformaciónde las referidas coordenadas en una secuencia de movimiento correspondiente a la trayectoria que definen; - una séptima etapa (2) de inicio de la ejecución de la secuencia de movimiento del manipulador (7), efectuando la aplicación de cola en la suela (3) mediante la pistola (8) y adaptándose al nivel Z o altura correspondiente a la suela (3); y - una octava etapa (26) de finalización de la operación de seguimiento y de posicionamiento del manipulador (7) en el origen de coordenadas de la superficie de trabajo (2). 7
; existiendo bajo dicha superficie (2) medios de iluminación (4) y existiendo sobre la misma superficie (2) medios de captación de imagen asociados a medios de tratamiento de imagen que")
8 8 ES A1

9 ES A1 9

10 10 ES A1
11 ES A1 11

12 12 ES A1

13 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA k 11 ES k 21 N. solicitud: k 22 Fecha de presentación de la solicitud: k 32 Fecha de prioridad: INFORME SOBRE EL ESTADO DE LA TECNICA k 1 Int. Cl. 6 : A43D 2/06, B2J 13/08, 9/02 DOCUMENTOS RELEVANTES Categoría Documentos citados Reivindicaciones afectadas A EP 1226 A1 (IRON FOX, S.r.L.) , resumen; columna 4, 1,2 línea 49 - columna, línea 30; columna 7, líneas 2-46; figuras 1-4. A US A (HERNDON et al.) , resumen; columna 3, 1 línea 8 - columna 4, línea 42. A BASE DE DATOS WPI en EPOQUE, semana , Londres: Derwent 1 Publications Ltd., AN , clase P42, SU A (CAR IND EXP CONS IN) , resumen. A EP A1 (BLANC, ROGER) A FR A1 (HUBER, AUGUSTE) Categoría de los documentos citados X: de particular relevancia Y: de particular relevancia combinado con otro/s de la misma categoría A: refleja el estado de la técnica O: referido a divulgación no escrita P: publicado entre la fecha de prioridad y la de presentación de la solicitud E: documento anterior, pero publicado después de la fecha de presentación de la solicitud El presente informe ha sido realizado para todas las reivindicaciones para las reivindicaciones n : Fecha de realización del informe Examinador Página A. Figuera González 1/1
 20.03.1990, resumen; columna 3, 1 línea 8 - columna 4, línea 42.")
ES 2 170 023 A1. Número de publicación: 2 170 023 PATENTES Y MARCAS. Número de solicitud: 200002844. Int. Cl. 7 : A41C 5/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 170 023 21 k Número de solicitud: 200002844 51 k Int. Cl. 7 : A41C 5/00 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 170 023 21 k Número de solicitud: 200002844 51 k Int. Cl. 7 : A41C 5/00 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
Int. Cl. 7 : A62C 13/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 149 67 21 k Número de solicitud: 009800216 1 k Int. Cl. 7 : A62C 13/00 A62C 13/62 A62C 13/76 k 12 SOLICITUD DE PATENTE A1
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 149 67 21 k Número de solicitud: 009800216 1 k Int. Cl. 7 : A62C 13/00 A62C 13/62 A62C 13/76 k 12 SOLICITUD DE PATENTE A1
Int. Cl. 7 : G08G 1/0965
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 161 180 21 k Número de solicitud: 009902774 1 k Int. Cl. 7 : G08G 1/096 BQ 1/2 k 12 SOLICITUD DE PATENTE A1 22 kfecha de
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 161 180 21 k Número de solicitud: 009902774 1 k Int. Cl. 7 : G08G 1/096 BQ 1/2 k 12 SOLICITUD DE PATENTE A1 22 kfecha de
Int. Cl. 6 : B42D 15/10. k 71 Solicitante/s: Juan Antonio García Geira. k 72 Inventor/es: García Geira, Juan Antonio
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 117 949 21 k Número de solicitud: 9601769 1 k Int. Cl. 6 : B42D 1/10 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 117 949 21 k Número de solicitud: 9601769 1 k Int. Cl. 6 : B42D 1/10 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
11 Número de publicación: 2 284 312. 21 Número de solicitud: 200500732. 51 Int. Cl.: 72 Inventor/es: Gubertini Ciriza, Raúl
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 284 312 21 Número de solicitud: 200500732 51 Int. Cl.: B65F 1/00 (2006.01) 12 PATENTE DE INVENCIÓN B1 22 Fecha de presentación:
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 284 312 21 Número de solicitud: 200500732 51 Int. Cl.: B65F 1/00 (2006.01) 12 PATENTE DE INVENCIÓN B1 22 Fecha de presentación:
ES 2 211 260 A1 A47B 81/00 A63B 57/00 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA. más reducido. 11 Número de publicación: 2 211 260
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 211 260 21 Número de solicitud: 2001026 1 Int. Cl. 7 : A63B 71/00 A47B 81/00 A63B 7/00 12 SOLICITUD DE PATENTE A1 22 Fecha de
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 211 260 21 Número de solicitud: 2001026 1 Int. Cl. 7 : A63B 71/00 A47B 81/00 A63B 7/00 12 SOLICITUD DE PATENTE A1 22 Fecha de
Int. Cl. 7 : B28B 7/22
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 161 621 21 k Número de solicitud: 00990196 1 k Int. Cl. 7 : B28B 7/22 B28B 7/36 k 12 SOLICITUD DE PATENTE A1 22 kfecha de
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 161 621 21 k Número de solicitud: 00990196 1 k Int. Cl. 7 : B28B 7/22 B28B 7/36 k 12 SOLICITUD DE PATENTE A1 22 kfecha de
Int. Cl. 7 : A01G 25/02
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 184 605 21 k Número de solicitud: 200100858 51 k Int. Cl. 7 : A01G 25/02 A01G 25/06 k 12 SOLICITUD DE PATENTE A1 22 kfecha
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 184 605 21 k Número de solicitud: 200100858 51 k Int. Cl. 7 : A01G 25/02 A01G 25/06 k 12 SOLICITUD DE PATENTE A1 22 kfecha
ES 2 264 860 A1 G07C 9/00 (2006.01) H04M 1/725 (2006.01) H04M 11/00 (2006.01) OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA
 H04M 1/725 (2006.01) H04M 11/00 (2006.01) OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA") 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 264 860 21 Número de solicitud: 200402000 51 Int. Cl.: G07C 9/00 (2006.01) H04M 1/725 (2006.01) H04M 11/00 (2006.01) 12 SOLICITUD
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 264 860 21 Número de solicitud: 200402000 51 Int. Cl.: G07C 9/00 (2006.01) H04M 1/725 (2006.01) H04M 11/00 (2006.01) 12 SOLICITUD
Int. Cl. 6 : B23C 1/08. 22 kfecha de presentación: 22.07.94 71 k Solicitante/s: Noran S.L. C. Saconi, 18 Arriegas Erandio, Vizcaya, ES
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 118 016 21 k Número de solicitud: 9401634 1 k Int. Cl. 6 : B23C 1/08 B23C 1/16 B23Q 3/10 k 12 SOLICITUD DE PATENTE A1 22
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 118 016 21 k Número de solicitud: 9401634 1 k Int. Cl. 6 : B23C 1/08 B23C 1/16 B23Q 3/10 k 12 SOLICITUD DE PATENTE A1 22
ES 1 034 790 U. Número de publicación: 1 034 790 PATENTES Y MARCAS. Número de solicitud: U 9602052. Int. Cl. 6 : A43D 3/02
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 034 790 21 k Número de solicitud: U 9602052 51 k Int. Cl. 6 : A43D 3/02 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 034 790 21 k Número de solicitud: U 9602052 51 k Int. Cl. 6 : A43D 3/02 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha
Int. Cl. 6 : B23K 26/08. 22 kfecha de presentación: 17.03.1998 71 k Solicitante/s: MACSA ID, S.A. Girona, 46-48 08240 Manresa, Barcelona, ES
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 140 341 21 k Número de solicitud: 00980082 1 k Int. Cl. 6 : B23K 26/08 B6C 9/46 k 12 SOLICITUD DE PATENTE A1 22 kfecha de
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 140 341 21 k Número de solicitud: 00980082 1 k Int. Cl. 6 : B23K 26/08 B6C 9/46 k 12 SOLICITUD DE PATENTE A1 22 kfecha de
PATENTES Y MARCAS. Strawinskylaan 341 1077 XX Amsterdam, NL 01.10.94
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA k 11 N. de publicación: ES 2 06 743 k 21 Número de solicitud: 90446 k 1 Int. Cl. : H03G 3/ k 12 SOLICITUD DE PATENTE A2 k 22 Fecha de presentación: 04.03.93
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA k 11 N. de publicación: ES 2 06 743 k 21 Número de solicitud: 90446 k 1 Int. Cl. : H03G 3/ k 12 SOLICITUD DE PATENTE A2 k 22 Fecha de presentación: 04.03.93
ES 2 257 890 A1 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA. 11 Número de publicación: 2 257 890. 21 Número de solicitud: 200202551
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 257 890 21 Número de solicitud: 200202551 51 Int. Cl. 7 : F16H 29/14 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación: 20.01.2005
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 257 890 21 Número de solicitud: 200202551 51 Int. Cl. 7 : F16H 29/14 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación: 20.01.2005
DESCRIPCION DEL SITEMA MASTER.
 DESCRIPCION DEL SITEMA MASTER. ESTRUCTURA. El sistema MASTER (Sistema Modular para Control Adaptativo en Tiempo Real) se ha implementado en base a un computador compatible PC-AT, dotado de una tarjeta
DESCRIPCION DEL SITEMA MASTER. ESTRUCTURA. El sistema MASTER (Sistema Modular para Control Adaptativo en Tiempo Real) se ha implementado en base a un computador compatible PC-AT, dotado de una tarjeta
Int. Cl. 7 : A63H 29/22
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 177 43 21 k Número de solicitud: 20000293 1 k Int. Cl. 7 : A63H 29/22 A63H 17/26 A63H 18/12 k 12 SOLICITUD DE PATENTE A1
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 177 43 21 k Número de solicitud: 20000293 1 k Int. Cl. 7 : A63H 29/22 A63H 17/26 A63H 18/12 k 12 SOLICITUD DE PATENTE A1
Int. Cl. 7 : A61C 3/00. k 71 Solicitante/s: CORPORACIÓN O.I.B., S.L. k 72 Inventor/es: Rodríguez del Val, José María
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 195 742 21 k Número de solicitud: 200102098 51 k Int. Cl. 7 : A61C 3/00 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 195 742 21 k Número de solicitud: 200102098 51 k Int. Cl. 7 : A61C 3/00 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
k 11 N. de publicación: ES 2 015 463 k 21 Número de solicitud: 8903166 k 51 Int. Cl. 5 : A63F 3/06 k 73 Titular/es: Vaprel, S.A.
 k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA k 11 N. de publicación: ES 2 015 463 k 21 Número de solicitud: 8903166 k 51 Int. Cl. 5 : A63F 3/06 k 12 PATENTEDEINVENCION A6 k 22 Fecha de presentación:
k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA k 11 N. de publicación: ES 2 015 463 k 21 Número de solicitud: 8903166 k 51 Int. Cl. 5 : A63F 3/06 k 12 PATENTEDEINVENCION A6 k 22 Fecha de presentación:
ES 2 302 587 A1 H04Q 7/22 (2006.01) G06F 9/445 (2006.01) OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA. 11 Número de publicación: 2 302 587
 G06F 9/445 (2006.01) OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA. 11 Número de publicación: 2 302 587") 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 302 587 21 Número de solicitud: 200503019 51 Int. Cl.: H04Q 7/22 (2006.01) G06F 9/445 (2006.01) 12 SOLICITUD DE PATENTE A1 22
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 302 587 21 Número de solicitud: 200503019 51 Int. Cl.: H04Q 7/22 (2006.01) G06F 9/445 (2006.01) 12 SOLICITUD DE PATENTE A1 22
Motores de Corriente Continua...3 Motores Paso a Paso...7 Bibliografía...9
 Por Guillermo Martín Díaz Alumno de: 1º Ingeniería Informática Curso 2005/2006 ËQGLFH Motores de Corriente Continua...3 Motores Paso a Paso...7 Bibliografía...9 2 0RWRUHVGH&RUULHQWHFRQWLQXD Son los mas
Por Guillermo Martín Díaz Alumno de: 1º Ingeniería Informática Curso 2005/2006 ËQGLFH Motores de Corriente Continua...3 Motores Paso a Paso...7 Bibliografía...9 2 0RWRUHVGH&RUULHQWHFRQWLQXD Son los mas
Int. Cl. 6 : D06H 7/22. 22 kfecha de presentación: 09.10.92 71 k Solicitante/s: Jose María Vilaro Alboquers C. Indústria, 4-6 Navarcles, Barcelona, ES
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k N. de publicación: ES 2 100 777 21 k Número de solicitud: 9202016 51 k Int. Cl. 6 : D06H 7/22 B29C 65/74 B29C 65/08 B26D 7/02 k 12 SOLICITUD DE PATENTE
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k N. de publicación: ES 2 100 777 21 k Número de solicitud: 9202016 51 k Int. Cl. 6 : D06H 7/22 B29C 65/74 B29C 65/08 B26D 7/02 k 12 SOLICITUD DE PATENTE
ES 2 230 956 A1 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA. 11 Número de publicación: 2 230 956. 21 Número de solicitud: 200202096
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 230 956 21 Número de solicitud: 200202096 51 Int. Cl. 7 : B23Q 11/00 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación: 12.09.2002
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 230 956 21 Número de solicitud: 200202096 51 Int. Cl. 7 : B23Q 11/00 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación: 12.09.2002
11 Número de publicación: 2 229 868. 21 Número de solicitud: 200202865. 51 Int. Cl. 7 : A01K 23/00. 72 Inventor/es: Balliu Falgueras, Carme
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 229 868 21 Número de solicitud: 200202865 51 Int. Cl. 7 : A01K 23/00 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación: 13.12.2002
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 229 868 21 Número de solicitud: 200202865 51 Int. Cl. 7 : A01K 23/00 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación: 13.12.2002
ES 2 388 275 B1. Aviso: ESPAÑA 11. Número de publicación: 2 388 275. Número de solicitud: 201130353 H04B 7/00 (2006.01)
") 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 21 Número de publicación: 2 388 27 Número de solicitud: 20113033 1 Int. CI.: H04B 7/00 (2006.01) 12 PATENTE DE INVENCIÓN B1 22 Fecha de presentación:
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 21 Número de publicación: 2 388 27 Número de solicitud: 20113033 1 Int. CI.: H04B 7/00 (2006.01) 12 PATENTE DE INVENCIÓN B1 22 Fecha de presentación:
k 11 N. de publicación: ES 2 035 793 k 21 Número de solicitud: 9102026 k 51 Int. Cl. 5 : G01B 11/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA k 11 N. de publicación: ES 2 035 793 k 21 Número de solicitud: 9102026 k 51 Int. Cl. 5 : G01B 11/00 B07C 5/00 k 12 SOLICITUD DE PATENTE A1 22 kfecha de
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA k 11 N. de publicación: ES 2 035 793 k 21 Número de solicitud: 9102026 k 51 Int. Cl. 5 : G01B 11/00 B07C 5/00 k 12 SOLICITUD DE PATENTE A1 22 kfecha de
Int. Cl. 7 : E04D 12/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 170 656 21 k Número de solicitud: 200000997 51 k Int. Cl. 7 : E04D 12/00 E04B 7/20 k 12 SOLICITUD DE PATENTE A1 22 kfecha
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 170 656 21 k Número de solicitud: 200000997 51 k Int. Cl. 7 : E04D 12/00 E04B 7/20 k 12 SOLICITUD DE PATENTE A1 22 kfecha
ES 2 147 081 A1 B22C 13/00. Número de publicación: 2 147 081 PATENTES Y MARCAS. Número de solicitud: 009700998. Int. Cl. 7 : B22C 9/00 16.08.
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 147 081 21 k Número de solicitud: 009700998 51 k Int. Cl. 7 : B22C 9/00 B22C 13/00 k 12 SOLICITUD DE PATENTE A1 22 kfecha
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 147 081 21 k Número de solicitud: 009700998 51 k Int. Cl. 7 : B22C 9/00 B22C 13/00 k 12 SOLICITUD DE PATENTE A1 22 kfecha
TEMA 14: Control Numérico para Máquinas-Herramienta
 Tema 14: Control Numérico y CAM 1/16 MÓDULO III: MECANIZADO POR ARRANQUE DE VIRUTA TEMA 14: Control Numérico para Máquinas-Herramienta TECNOLOGÍA MECÁNICA DPTO. DE INGENIERÍA MECÁNICA Universidad del País
Tema 14: Control Numérico y CAM 1/16 MÓDULO III: MECANIZADO POR ARRANQUE DE VIRUTA TEMA 14: Control Numérico para Máquinas-Herramienta TECNOLOGÍA MECÁNICA DPTO. DE INGENIERÍA MECÁNICA Universidad del País
Int. Cl. 7 : H05B 6/80
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 185 484 21 k Número de solicitud: 200101089 51 k Int. Cl. 7 : H05B 6/80 A01M 1/22 k 12 SOLICITUD DE PATENTE A1 22 kfecha
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 185 484 21 k Número de solicitud: 200101089 51 k Int. Cl. 7 : H05B 6/80 A01M 1/22 k 12 SOLICITUD DE PATENTE A1 22 kfecha
ES 2 190 724 A1. Número de publicación: 2 190 724 PATENTES Y MARCAS. Número de solicitud: 200100359. Int. Cl. 7 : A61H 1/02
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 190 724 21 k Número de solicitud: 200100359 51 k Int. Cl. 7 : A61H 1/02 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 190 724 21 k Número de solicitud: 200100359 51 k Int. Cl. 7 : A61H 1/02 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
B23K 23/00 //E01B 29/42 B60M 5/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k N. de publicación: ES 2 036 42 21 k Número de solicitud: 91412 1 k Int. Cl. : H01R 4/02 B23K 23/00 //E01B 29/42 BM /00 k 12 SOLICITUD DE PATENTE A2
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k N. de publicación: ES 2 036 42 21 k Número de solicitud: 91412 1 k Int. Cl. : H01R 4/02 B23K 23/00 //E01B 29/42 BM /00 k 12 SOLICITUD DE PATENTE A2
ES 2 197 008 A1. Número de publicación: 2 197 008 PATENTES Y MARCAS. Número de solicitud: 200201269. Int. Cl. 7 : A61D 19/02
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 197 008 21 k Número de solicitud: 200201269 1 k Int. Cl. 7 : A61D 19/02 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 197 008 21 k Número de solicitud: 200201269 1 k Int. Cl. 7 : A61D 19/02 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
11 Número de publicación: 2 191 507. 21 Número de solicitud: 200001080. 51 Int. Cl. 7 : G06F 1/00. 74 Agente: Gómez Múgica, Luis Antonio
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 191 07 21 Número de solicitud: 200001080 1 Int. Cl. 7 : G06F 1/00 G07C 9/00 H04L 9/32 12 PATENTE DE INVENCIÓN B1 22 Fecha de
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 191 07 21 Número de solicitud: 200001080 1 Int. Cl. 7 : G06F 1/00 G07C 9/00 H04L 9/32 12 PATENTE DE INVENCIÓN B1 22 Fecha de
k 11 N. de publicación: ES 2 006 635 k 21 Número de solicitud: 8801208 k 51 Int. Cl. 4 : A47L 11/34 k 73 Titular/es: Juan Antonio Musitu Ochoa
 k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA k 11 N. de publicación: ES 2 006 63 k 21 Número de solicitud: 8801208 k 1 Int. Cl. 4 : A47L 11/34 k 12 PATENTEDEINVENCION A6 k 22 Fecha de presentación:
k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA k 11 N. de publicación: ES 2 006 63 k 21 Número de solicitud: 8801208 k 1 Int. Cl. 4 : A47L 11/34 k 12 PATENTEDEINVENCION A6 k 22 Fecha de presentación:
ES 1 011 178 U. Número de publicación: 1 011 178 REGISTRO DE LA PROPIEDAD INDUSTRIAL. Número de solicitud: U 8902460. Int. Cl.
 k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA 11 k Número de publicación: 1 011 178 21 k Número de solicitud: U 89024 1 k Int. Cl. 4 : A63F 3/06 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de presentación:
k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA 11 k Número de publicación: 1 011 178 21 k Número de solicitud: U 89024 1 k Int. Cl. 4 : A63F 3/06 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de presentación:
ES 1 046 526 U. Número de publicación: 1 046 526 PATENTES Y MARCAS. Número de solicitud: U 200001569. Int. Cl. 7 : B61D 35/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 046 26 21 k Número de solicitud: U 000169 1 k Int. Cl. 7 : B61D 3/00 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 046 26 21 k Número de solicitud: U 000169 1 k Int. Cl. 7 : B61D 3/00 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de
ES 2 187 295 A1 G06F 17/60. Número de publicación: 2 187 295 PATENTES Y MARCAS. Número de solicitud: 200102423. Int. Cl. 7 : G06F 19/00 16.05.
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 187 29 21 k Número de solicitud: 200102423 1 k Int. Cl. 7 : G06F 19/00 G06F 17/60 k 12 SOLICITUD DE PATENTE A1 22 kfecha
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 187 29 21 k Número de solicitud: 200102423 1 k Int. Cl. 7 : G06F 19/00 G06F 17/60 k 12 SOLICITUD DE PATENTE A1 22 kfecha
4. PROGRAMACIÓN DE CNC. 4.1. TORNOS.
 4.1. TORNOS. DETERMINACIÓN DEL ORIGEN PIEZA REGLAJE DE LA HERRAMIENTA El reglaje de herramientas es la operación previa al mecanizado, mediante la cual se establece la distancia desde cada punta o extremo
4.1. TORNOS. DETERMINACIÓN DEL ORIGEN PIEZA REGLAJE DE LA HERRAMIENTA El reglaje de herramientas es la operación previa al mecanizado, mediante la cual se establece la distancia desde cada punta o extremo
6. DESCRIPCIÓN DEL SOFTWARE
 Capítulo 2. Equipo 6. DESCRIPCIÓN DEL SOFTWARE 6.1 Introducción El equipo de medida descrito en el capítulo anterior lleva asociado un software que hace de sistema de control del proceso de medición. Este
Capítulo 2. Equipo 6. DESCRIPCIÓN DEL SOFTWARE 6.1 Introducción El equipo de medida descrito en el capítulo anterior lleva asociado un software que hace de sistema de control del proceso de medición. Este
Int. Cl. 6 : B60L 1/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k N. de publicación: ES 2 069 474 21 k Número de solicitud: 9301266 51 k Int. Cl. 6 : B60L 1/00 B60K 15/00 k 12 SOLICITUD DE PATENTE A2 22 kfecha de
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k N. de publicación: ES 2 069 474 21 k Número de solicitud: 9301266 51 k Int. Cl. 6 : B60L 1/00 B60K 15/00 k 12 SOLICITUD DE PATENTE A2 22 kfecha de
La importancia de dimensionar correctamente los sistemas de frenado en aerogeneradores residenciales.
 La importancia de dimensionar correctamente los sistemas de frenado en aerogeneradores residenciales. La instalación de aerogeneradores en entornos urbanos requiere la implementación de importantes medidas
La importancia de dimensionar correctamente los sistemas de frenado en aerogeneradores residenciales. La instalación de aerogeneradores en entornos urbanos requiere la implementación de importantes medidas
Int. Cl. 7 : G04B 45/00. 22 kfecha de presentación: 12.03.1998 71 k Solicitante/s: GHESA INGENIERIA Y TECNOLOGIA, S.A. Magallanes, 3 28015 Madrid, ES
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 143 941 21 k Número de solicitud: 00980030 1 k Int. Cl. 7 : G04B 4/00 B0B 17/08 k 12 SOLICITUD DE PATENTE A1 22 kfecha de
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 143 941 21 k Número de solicitud: 00980030 1 k Int. Cl. 7 : G04B 4/00 B0B 17/08 k 12 SOLICITUD DE PATENTE A1 22 kfecha de
11 Número de publicación: 2 256 996. 51 Int. Cl. 7 : B31B 19/74
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 26 996 1 Int. Cl. 7 : B31B 19/74 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 99120740.8 86 Fecha de presentación
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 26 996 1 Int. Cl. 7 : B31B 19/74 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 99120740.8 86 Fecha de presentación
ES 2 146 190 A1. Número de publicación: 2 146 190 PATENTES Y MARCAS. Número de solicitud: 009802725. Int. Cl. 7 : A47C 23/06
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 146 190 21 k Número de solicitud: 009802725 51 k Int. Cl. 7 : A47C 23/06 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 146 190 21 k Número de solicitud: 009802725 51 k Int. Cl. 7 : A47C 23/06 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
Int. Cl. 7 : G02B 6/255
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 155 033 21 k Número de solicitud: 009901472 51 k Int. Cl. 7 : G02B 6/255 G02B 6/287 H05B 3/10 B29C 65/02 k 12 SOLICITUD DE
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 155 033 21 k Número de solicitud: 009901472 51 k Int. Cl. 7 : G02B 6/255 G02B 6/287 H05B 3/10 B29C 65/02 k 12 SOLICITUD DE
11 Número de publicación: 2 222 084. 21 Número de solicitud: 200301076. 51 Int. Cl. 7 : H04L 12/28. 72 Inventor/es: Zarraga Ochoa, Igor
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 222 084 21 Número de solicitud: 200301076 51 Int. Cl. 7 : H04L 12/28 H04Q 7/24 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación:
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 222 084 21 Número de solicitud: 200301076 51 Int. Cl. 7 : H04L 12/28 H04Q 7/24 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación:
ES 1 050 810 U. Número de publicación: 1 050 810 PATENTES Y MARCAS. Número de solicitud: U 200103091. Int. Cl. 7 : A61D 19/02
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 00 8 21 k Número de solicitud: U 091 1 k Int. Cl. 7 : A61D 19/02 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de presentación:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 00 8 21 k Número de solicitud: U 091 1 k Int. Cl. 7 : A61D 19/02 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de presentación:
Control Teaching de un Brazo Robot de Cinco Grados de Libertad
 Control Teaching de un Brazo Robot de Cinco Grados de Libertad Michel Ibáñez a610221@upc.edu.pe Christian R. Reátegui amoran@upc.edu.pe Asesor: Ing. Antonio Moran amoran@upc.edu.pe Universidad Peruana
Control Teaching de un Brazo Robot de Cinco Grados de Libertad Michel Ibáñez a610221@upc.edu.pe Christian R. Reátegui amoran@upc.edu.pe Asesor: Ing. Antonio Moran amoran@upc.edu.pe Universidad Peruana
SCT3000 95. Software para la calibración de transductores de fuerza. Versión 3.5. Microtest S.A. microtes@arrakis.es
 SCT3000 95 Versión 3.5 Software para la calibración de transductores de fuerza. Microtest S.A. microtes@arrakis.es Introducción El programa SCT3000 95, es un sistema diseñado para la calibración automática
SCT3000 95 Versión 3.5 Software para la calibración de transductores de fuerza. Microtest S.A. microtes@arrakis.es Introducción El programa SCT3000 95, es un sistema diseñado para la calibración automática
ES 1 014 579 U. Número de publicación: 1 014 579 REGISTRO DE LA PROPIEDAD INDUSTRIAL. Número de solicitud: U 9002117. Int. Cl.
 k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA 11 k Número de publicación: 1 014 79 21 k Número de solicitud: U 9002117 1 k Int. Cl. : B62B 9/08 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de presentación:
k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA 11 k Número de publicación: 1 014 79 21 k Número de solicitud: U 9002117 1 k Int. Cl. : B62B 9/08 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de presentación:
PROCEDIMIENTO PARA PRUEBAS DE VALIDACION DE MODELOS MATEMATICOS DE UNIDADES GENERADORAS
 PROCEDIMIENTO PARA PRUEBAS DE VALIDACION DE MODELOS MATEMATICOS DE UNIDADES GENERADORAS 1. OBJETIVO Verificar la validez del modelo matemático de los sistema de control de las unidades generadoras del
PROCEDIMIENTO PARA PRUEBAS DE VALIDACION DE MODELOS MATEMATICOS DE UNIDADES GENERADORAS 1. OBJETIVO Verificar la validez del modelo matemático de los sistema de control de las unidades generadoras del
k 11 N. de publicación: ES 2 012 852 k 21 Número de solicitud: 8802912 k 51 Int. Cl. 4 : G07F 17/32 k 73 Titular/es: Ainsworth Nominees Pty.
 k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA k 11 N. de publicación: ES 2 012 852 k 21 Número de solicitud: 8802912 k 51 Int. Cl. 4 : G07F 17/32 k 12 PATENTEDEINVENCION A6 k 22 Fecha de presentación:
k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA k 11 N. de publicación: ES 2 012 852 k 21 Número de solicitud: 8802912 k 51 Int. Cl. 4 : G07F 17/32 k 12 PATENTEDEINVENCION A6 k 22 Fecha de presentación:
ES 2 127 116 A1. Número de publicación: 2 127 116 PATENTES Y MARCAS. Número de solicitud: 9602250. Int. Cl. 6 : A61C 8/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 127 116 21 k Número de solicitud: 9602250 51 k Int. Cl. 6 : A61C 8/00 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 127 116 21 k Número de solicitud: 9602250 51 k Int. Cl. 6 : A61C 8/00 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
Int. Cl. 6 : E05B 49/00. k 73 Titular/es: k 72 Inventor/es: k 74 Agente: Campo Castel, Domingo del
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 129 003 21 k Número de solicitud: 009701927 1 k Int. Cl. 6 : E0B 49/00 G07C 1/32 k 12 PATENTEDEINVENCION B1 k 22 Fecha de
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 129 003 21 k Número de solicitud: 009701927 1 k Int. Cl. 6 : E0B 49/00 G07C 1/32 k 12 PATENTEDEINVENCION B1 k 22 Fecha de
 Expresión Gráfica. 16 Otros dispositivos de almacenamiento de información son: los compact disc, con capacidad hasta 650 Megabytes, y las unidades zip que pueden almacenar 100 ó 250 Megabytes, según modelos.
Expresión Gráfica. 16 Otros dispositivos de almacenamiento de información son: los compact disc, con capacidad hasta 650 Megabytes, y las unidades zip que pueden almacenar 100 ó 250 Megabytes, según modelos.
ES 1 010 075 U. Número de publicación: 1 010 075 REGISTRO DE LA PROPIEDAD INDUSTRIAL. Número de solicitud: U 8901065. Int. Cl.
 k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA 11 k Número de publicación: 1 0 07 21 k Número de solicitud: U 8906 1 k Int. Cl. 4 : B43K 7/00 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de presentación:
k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA 11 k Número de publicación: 1 0 07 21 k Número de solicitud: U 8906 1 k Int. Cl. 4 : B43K 7/00 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de presentación:
ES 2 245 608 A1 H02J 3/24 H02J 3/06 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA. eléctrica de la red. 11 Número de publicación: 2 245 608
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 24 8 21 Número de solicitud: 0184 1 Int. Cl. 7 : F02D 9/00 H02J 3/24 H02J 3/06 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación:.06.04
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 24 8 21 Número de solicitud: 0184 1 Int. Cl. 7 : F02D 9/00 H02J 3/24 H02J 3/06 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación:.06.04
ES 2 115 544 A1. Número de publicación: 2 115 544 PATENTES Y MARCAS. Número de solicitud: 9601808. Int. Cl. 6 : A61C 19/04
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 11 44 21 k Número de solicitud: 9601808 1 k Int. Cl. 6 : A61C 19/04 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 11 44 21 k Número de solicitud: 9601808 1 k Int. Cl. 6 : A61C 19/04 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
11 Número de publicación: 2 288 447. 21 Número de solicitud: 200702102. 51 Int. Cl.: 72 Inventor/es: Cabre Roige, Luis
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 288 447 21 Número de solicitud: 200702102 51 Int. Cl.: A01G 9/02 (2006.01) A01G 27/04 (2006.01) 12 SOLICITUD DE PATENTE A2 22
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 288 447 21 Número de solicitud: 200702102 51 Int. Cl.: A01G 9/02 (2006.01) A01G 27/04 (2006.01) 12 SOLICITUD DE PATENTE A2 22
Gestión de la Configuración
 Gestión de la ÍNDICE DESCRIPCIÓN Y OBJETIVOS... 1 ESTUDIO DE VIABILIDAD DEL SISTEMA... 2 ACTIVIDAD EVS-GC 1: DEFINICIÓN DE LOS REQUISITOS DE GESTIÓN DE CONFIGURACIÓN... 2 Tarea EVS-GC 1.1: Definición de
Gestión de la ÍNDICE DESCRIPCIÓN Y OBJETIVOS... 1 ESTUDIO DE VIABILIDAD DEL SISTEMA... 2 ACTIVIDAD EVS-GC 1: DEFINICIÓN DE LOS REQUISITOS DE GESTIÓN DE CONFIGURACIÓN... 2 Tarea EVS-GC 1.1: Definición de
ES 2 192 897 A1 B42F 5/00. Número de publicación: 2 192 897 PATENTES Y MARCAS. Número de solicitud: 200000528. Int. Cl. 7 : B42D 1/08 16.10.
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 192 897 21 k Número de solicitud: 200000528 51 k Int. Cl. 7 : B42D 1/08 B42F 5/00 k 12 SOLICITUD DE PATENTE A1 22 kfecha
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 192 897 21 k Número de solicitud: 200000528 51 k Int. Cl. 7 : B42D 1/08 B42F 5/00 k 12 SOLICITUD DE PATENTE A1 22 kfecha
ES 2 197 747 A1. Número de publicación: 2 197 747 PATENTES Y MARCAS. Número de solicitud: 200100790. Int. Cl. 7 : B26D 7/24
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 197 747 21 k Número de solicitud: 200100790 51 k Int. Cl. 7 : B26D 7/24 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 197 747 21 k Número de solicitud: 200100790 51 k Int. Cl. 7 : B26D 7/24 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
11 Número de publicación: 2 232 572. 51 Int. Cl. 7 : B23Q 17/00. 72 Inventor/es: Desmoulins, Marcel. 74 Agente: Urizar Anasagasti, José Antonio
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 232 72 1 Int. Cl. 7 : B23Q 17/00 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 01400203.4 86 Fecha de presentación:
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 232 72 1 Int. Cl. 7 : B23Q 17/00 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 01400203.4 86 Fecha de presentación:
PATRONAJE INDUSTRIAL INFORMATIZADO EN 2D ON-LINE
 EDA PLATAFORMA E-LEARNING CURSO: PATRONAJE INDUSTRIAL INFORMATIZADO EN 2D ON-LINE CÓDIGO DE CURSO: TCPF02EXP MÓDULO FORMATIVO 1: INSTALACIÓN, ENTORNO Y FUNDAMENTOS DE PATRONEO UNIDAD DIDÁCTICA 3: CONTENIDOS
EDA PLATAFORMA E-LEARNING CURSO: PATRONAJE INDUSTRIAL INFORMATIZADO EN 2D ON-LINE CÓDIGO DE CURSO: TCPF02EXP MÓDULO FORMATIVO 1: INSTALACIÓN, ENTORNO Y FUNDAMENTOS DE PATRONEO UNIDAD DIDÁCTICA 3: CONTENIDOS
11 Número de publicación: 1 063 268. 21 Número de solicitud: U 200601405. 51 Int. Cl.: 72 Inventor/es: Bermúdez Pestonit, Pablo
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 1 063 268 21 Número de solicitud: U 01 1 Int. Cl.: G08B 2/00 (06.01) 12 SOLICITUD DE MODELO DE UTILIDAD U 22 Fecha de presentación:
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 1 063 268 21 Número de solicitud: U 01 1 Int. Cl.: G08B 2/00 (06.01) 12 SOLICITUD DE MODELO DE UTILIDAD U 22 Fecha de presentación:
11 Número de publicación: 2 209 573. 21 Número de solicitud: 200101531. 51 Int. Cl. 7 : B68G 7/00. 72 Inventor/es: Lucía Monforte, Pedro
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 209 573 21 Número de solicitud: 200101531 51 Int. Cl. 7 : B68G 7/00 B29C 44/14 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación:
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 209 573 21 Número de solicitud: 200101531 51 Int. Cl. 7 : B68G 7/00 B29C 44/14 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación:
11 Número de publicación: 2 308 894. 21 Número de solicitud: 200601663. 51 Int. Cl.: 72 Inventor/es: Blanco del Río, Pablo
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 308 894 21 Número de solicitud: 200601663 1 Int. Cl.: A63F 13/08 (2006.01) G06Q 20/00 (2006.01) 12 SOLICITUD DE PATENTE A1 22
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 308 894 21 Número de solicitud: 200601663 1 Int. Cl.: A63F 13/08 (2006.01) G06Q 20/00 (2006.01) 12 SOLICITUD DE PATENTE A1 22
Int. Cl. 6 : A45C 11/24. k 71 Solicitante/s: Antonio Gregorio García Falces. k 72 Inventor/es: García Falces, Antonio Gregorio;
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 029 389 21 k Número de solicitud: U 9403032 1 k Int. Cl. 6 : A4C 11/24 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 029 389 21 k Número de solicitud: U 9403032 1 k Int. Cl. 6 : A4C 11/24 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha
Int. Cl.: 74 Agente: Ungría López, Javier
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 361 129 1 Int. Cl.: B2J 1/00 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Número de solicitud europea: 078289. 96 Fecha de
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 361 129 1 Int. Cl.: B2J 1/00 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Número de solicitud europea: 078289. 96 Fecha de
Int. Cl. 6 : G06F 3/02
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 107 937 21 k Número de solicitud: 9402269 1 k Int. Cl. 6 : G06F 3/02 A61F 4/00 k 12 SOLICITUD DE PATENTE A1 22 kfecha de
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 107 937 21 k Número de solicitud: 9402269 1 k Int. Cl. 6 : G06F 3/02 A61F 4/00 k 12 SOLICITUD DE PATENTE A1 22 kfecha de
Máquinas CNC - Categorías Oficial Múltiple Superior y Oficial Múltiple. Conceptos técnicos involucrados. Acuerdo del 14/5/2013
 Máquinas CNC - Categorías Oficial Múltiple Superior y Oficial Múltiple Conceptos técnicos involucrados Acuerdo del 14/5/2013 Preguntas frecuentes Todos los que operan Máquinas CNC reciben la nueva categoría?
Máquinas CNC - Categorías Oficial Múltiple Superior y Oficial Múltiple Conceptos técnicos involucrados Acuerdo del 14/5/2013 Preguntas frecuentes Todos los que operan Máquinas CNC reciben la nueva categoría?
U.T. 2 Planificación de Proyectos
 U.T. 2 Planificación de Proyectos En el tema anterior hemos visto que es determinante una buena planificación del proyecto, ya que de no realizarse ésta, nunca sabremos el tiempo que resta para la finalización
U.T. 2 Planificación de Proyectos En el tema anterior hemos visto que es determinante una buena planificación del proyecto, ya que de no realizarse ésta, nunca sabremos el tiempo que resta para la finalización
6. SISTEMAS CAD-CAM (CAM) 6.1. CONCEPTO DE CAM
 6.1. CONCEPTO DE CAM") 6.1. CONCEPTO DE CAM Las siglas CAM corresponden al acrónimo de Computer Aided Manufacturing, Fabricación asistida por ordenador. Por CAM se entiende la utilización de ordenadores para tareas técnicas
6.1. CONCEPTO DE CAM Las siglas CAM corresponden al acrónimo de Computer Aided Manufacturing, Fabricación asistida por ordenador. Por CAM se entiende la utilización de ordenadores para tareas técnicas
k 11 N. de publicación: ES 2 027 329 k 51 Int. Cl. 5 : B28D 1/08 k 72 Inventor/es: Pittet, Guy k 74 Agente: Ungría Goiburu, Bernardo
 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA 11 N. de publicación: ES 2 027 329 1 Int. Cl. : B28D 1/08 12 TRADUCCION DE PATENTE EUROPEA T3 86 Número de solicitud europea: 881771.9 86 Fecha de presentación
19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA 11 N. de publicación: ES 2 027 329 1 Int. Cl. : B28D 1/08 12 TRADUCCION DE PATENTE EUROPEA T3 86 Número de solicitud europea: 881771.9 86 Fecha de presentación
ES 2 146 184 A1. Número de publicación: 2 146 184 PATENTES Y MARCAS. Número de solicitud: 009802270. Int. Cl. 7 : A62C 27/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 146 184 21 k Número de solicitud: 009802270 51 k Int. Cl. 7 : A62C 27/00 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 146 184 21 k Número de solicitud: 009802270 51 k Int. Cl. 7 : A62C 27/00 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
11 Número de publicación: 2 321 774. 21 Número de solicitud: 200600040. 51 Int. Cl.: 74 Agente: Urízar Anasagasti, Jesús María
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 321 774 21 Número de solicitud: 200600040 51 Int. Cl.: H04W 88/00 (2009.01) G08B 23/00 (2006.01) 12 SOLICITUD DE PATENTE A1 22
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 321 774 21 Número de solicitud: 200600040 51 Int. Cl.: H04W 88/00 (2009.01) G08B 23/00 (2006.01) 12 SOLICITUD DE PATENTE A1 22
Unidad 1. Fundamentos en Gestión de Riesgos
 1.1 Gestión de Proyectos Unidad 1. Fundamentos en Gestión de Riesgos La gestión de proyectos es una disciplina con la cual se integran los procesos propios de la gerencia o administración de proyectos.
1.1 Gestión de Proyectos Unidad 1. Fundamentos en Gestión de Riesgos La gestión de proyectos es una disciplina con la cual se integran los procesos propios de la gerencia o administración de proyectos.
11 Número de publicación: 2 231 033. 21 Número de solicitud: 200302537. 51 Int. Cl. 7 : A61C 8/00. 72 Inventor/es: Buesa García, Ramón
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 231 033 21 Número de solicitud: 200302537 51 Int. Cl. 7 : A61C 8/00 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación: 30.10.2003
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 231 033 21 Número de solicitud: 200302537 51 Int. Cl. 7 : A61C 8/00 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación: 30.10.2003
11 Número de publicación: 2 234 421. 21 Número de solicitud: 200302856. 51 Int. Cl. 72 Inventor/es: Rodríguez González, Jesús
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 234 421 21 Número de solicitud: 20030286 1 Int. Cl. H04Q 9/00 (2006.01) H04N /232 (2006.01) H04N 7/18 (2006.01) G06F 17/60 (2006.01)
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 234 421 21 Número de solicitud: 20030286 1 Int. Cl. H04Q 9/00 (2006.01) H04N /232 (2006.01) H04N 7/18 (2006.01) G06F 17/60 (2006.01)
ES 2 444 916 T3 DESCRIPCIÓN
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 444 916 1 Int. CI.: F41A 23/34 (06.01) F41G /06 (06.01) F41G 3/04 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Fecha de presentación
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 444 916 1 Int. CI.: F41A 23/34 (06.01) F41G /06 (06.01) F41G 3/04 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Fecha de presentación
Eurowin 8.0 SQL. Manual del módulo TALLAS Y COLORES
 Eurowin 8.0 SQL Manual del módulo TALLAS Y COLORES Documento: me_tallasycolores Edición: 05 Nombre: Manual del módulo Tallas y Colores de Eurowin 8.0 SQL Fecha: 30-04-2012 Tabla de contenidos 1. Introducción...
Eurowin 8.0 SQL Manual del módulo TALLAS Y COLORES Documento: me_tallasycolores Edición: 05 Nombre: Manual del módulo Tallas y Colores de Eurowin 8.0 SQL Fecha: 30-04-2012 Tabla de contenidos 1. Introducción...
k 11 N. de publicación: ES 2 047 221 k 51 Int. Cl. 5 : G01R 21/133
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA k 11 N. de publicación: ES 2 047 221 k 1 Int. Cl. : G01R 21/133 G11C 7/00 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea: 90116348.
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA k 11 N. de publicación: ES 2 047 221 k 1 Int. Cl. : G01R 21/133 G11C 7/00 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea: 90116348.
ES 1 038 591 U. Número de publicación: 1 038 591 PATENTES Y MARCAS. Número de solicitud: U 9702743. Int. Cl. 6 : A62C 39/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 038 91 21 k Número de solicitud: U 9702743 1 k Int. Cl. 6 : A62C 39/00 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 038 91 21 k Número de solicitud: U 9702743 1 k Int. Cl. 6 : A62C 39/00 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha
Introducción a los sistemas de control
 Introducción a los sistemas de control Sistema Un sistema es una combinación de componentes que actúan juntos y realizan un objetivo determinado A un sistema se le puede considerar como una caja negra
Introducción a los sistemas de control Sistema Un sistema es una combinación de componentes que actúan juntos y realizan un objetivo determinado A un sistema se le puede considerar como una caja negra
ES 1 050 475 U. Número de publicación: 1 050 475 PATENTES Y MARCAS. Número de solicitud: U 200102640. Int. Cl. 7 : H04M 1/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 00 47 21 k Número de solicitud: U 026 1 k Int. Cl. 7 : H04M 1/00 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de presentación:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 00 47 21 k Número de solicitud: U 026 1 k Int. Cl. 7 : H04M 1/00 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de presentación:
ES 1 027 619 U. Número de publicación: 1 027 619 PATENTES Y MARCAS. Número de solicitud: U 9401006. Int. Cl. 5 : A63G 13/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 027 619 21 k Número de solicitud: U 906 1 k Int. Cl. : A63G 13/00 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de presentación:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 027 619 21 k Número de solicitud: U 906 1 k Int. Cl. : A63G 13/00 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de presentación:
ES 2 244 309 A1 E04D 1/36 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA. 11 Número de publicación: 2 244 309. 21 Número de solicitud: 200400215
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 244 309 21 Número de solicitud: 20040021 1 Int. Cl. 7 : B32B 27/32 E04D 1/36 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación:
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 244 309 21 Número de solicitud: 20040021 1 Int. Cl. 7 : B32B 27/32 E04D 1/36 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación:
ES 1 031 376 U. Número de publicación: 1 031 376 PATENTES Y MARCAS. Número de solicitud: U 9501597. Int. Cl. 6 : A62C 37/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 031 376 21 k Número de solicitud: U 90197 1 k Int. Cl. 6 : A62C 37/00 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 031 376 21 k Número de solicitud: U 90197 1 k Int. Cl. 6 : A62C 37/00 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de
ES 2 170 634 A1 H04M 11/04 H04Q 7/32. Número de publicación: 2 170 634 PATENTES Y MARCAS. Número de solicitud: 200000129. Int. Cl.
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 170 634 21 k Número de solicitud: 200000129 51 k Int. Cl. 7 : H04M 1/26 H04M 11/04 H04Q 7/32 k 12 SOLICITUD DE PATENTE A1
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 170 634 21 k Número de solicitud: 200000129 51 k Int. Cl. 7 : H04M 1/26 H04M 11/04 H04Q 7/32 k 12 SOLICITUD DE PATENTE A1
Int. Cl. 7 : G09F 15/00. 22 kfecha de presentación: 27.07.2001 71 k Solicitante/s: David Donoso Pía Paseo de la Castellana 70, local Madrid, ES
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 199 640 21 k Número de solicitud: 200101771 51 k Int. Cl. 7 : G09F 15/00 G09F 17/00 A47F 5/01 k 12 SOLICITUD DE PATENTE A1
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 199 640 21 k Número de solicitud: 200101771 51 k Int. Cl. 7 : G09F 15/00 G09F 17/00 A47F 5/01 k 12 SOLICITUD DE PATENTE A1
C02F 1/02 F28G 9/00 //A61L 11/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k N. de publicación: ES 2 060 38 21 k Número de solicitud: 9202661 1 k Int. Cl. : C02F 9/00 C02F 1/02 F28G 9/00 //A61L 11/00 k 12 SOLICITUD DE PATENTE
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k N. de publicación: ES 2 060 38 21 k Número de solicitud: 9202661 1 k Int. Cl. : C02F 9/00 C02F 1/02 F28G 9/00 //A61L 11/00 k 12 SOLICITUD DE PATENTE
Int. Cl. 7 : A63F 9/18
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 1 41 21 k Número de solicitud: 00001 1 k Int. Cl. 7 : A63F 9/18 H04Q 7/22 k 12 SOLICITUD DE PATENTE A1 22 kfecha de presentación:.02.00
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 1 41 21 k Número de solicitud: 00001 1 k Int. Cl. 7 : A63F 9/18 H04Q 7/22 k 12 SOLICITUD DE PATENTE A1 22 kfecha de presentación:.02.00
TRANSFORMADOR DE ALTA FRECUENCIA CON CONMUTACIÓN AUTOMÁTICA
 ÓPTIMO RENDIMIENTO Y FLEXIBILIDAD DE USO TRANSFORMADOR DE ALTA FRECUENCIA CON CONMUTACIÓN AUTOMÁTICA Una de las muchas exigencias de los inversores modernos son unos rangos de entrada y de tensión MPP
ÓPTIMO RENDIMIENTO Y FLEXIBILIDAD DE USO TRANSFORMADOR DE ALTA FRECUENCIA CON CONMUTACIÓN AUTOMÁTICA Una de las muchas exigencias de los inversores modernos son unos rangos de entrada y de tensión MPP
11 Número de publicación: 2 188 368. 21 Número de solicitud: 200101126. 51 Int. Cl. 7 : B60R 25/10. 72 Inventor/es: Febles Herrera, Jesús Javier
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 188 368 21 Número de solicitud: 200101126 51 Int. Cl. 7 : B60R 25/10 12 PATENTE DE INVENCIÓN B1 22 Fecha de presentación: 08.05.2001
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 188 368 21 Número de solicitud: 200101126 51 Int. Cl. 7 : B60R 25/10 12 PATENTE DE INVENCIÓN B1 22 Fecha de presentación: 08.05.2001
Int. Cl. 6 : F16C 11/04
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 133 06 21 k Número de solicitud: 9601130 1 k Int. Cl. 6 : F16C 11/04 A61G 7/002 k 12 SOLICITUD DE PATENTE A1 22 kfecha de
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 133 06 21 k Número de solicitud: 9601130 1 k Int. Cl. 6 : F16C 11/04 A61G 7/002 k 12 SOLICITUD DE PATENTE A1 22 kfecha de
ES 1 016 726 U. Número de publicación: 1 016 726 REGISTRO DE LA PROPIEDAD INDUSTRIAL. Número de solicitud: U 9100270. Int. Cl.
 k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA 11 k Número de publicación: 1 016 726 21 k Número de solicitud: U 9100270 1 k Int. Cl. : B42F 19/00 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de
k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA 11 k Número de publicación: 1 016 726 21 k Número de solicitud: U 9100270 1 k Int. Cl. : B42F 19/00 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de
TEMA 4.- EL SUBSISTEMA DE PRODUCCIÓN.
 TEMA 4.- EL SUBSISTEMA DE PRODUCCIÓN. 1. Concepto y elementos del subsistema de producción. 2. Clases de procesos productivos 3. Objetivos y decisiones en la administración de la producción Concepto y
TEMA 4.- EL SUBSISTEMA DE PRODUCCIÓN. 1. Concepto y elementos del subsistema de producción. 2. Clases de procesos productivos 3. Objetivos y decisiones en la administración de la producción Concepto y
ESCUELA PROFESIONAL SAN FRANCISCO
 Módulo profesional: Vehículos híbridos y eléctricos. Código: CL14. Resultados de aprendizaje y criterios de evaluación. 1. Caracteriza el funcionamiento de los vehículos híbridos y eléctricos, interpretando
Módulo profesional: Vehículos híbridos y eléctricos. Código: CL14. Resultados de aprendizaje y criterios de evaluación. 1. Caracteriza el funcionamiento de los vehículos híbridos y eléctricos, interpretando
UNIDADES DE ALMACENAMIENTO DE DATOS
 1.2 MATÉMATICAS DE REDES 1.2.1 REPRESENTACIÓN BINARIA DE DATOS Los computadores manipulan y almacenan los datos usando interruptores electrónicos que están ENCENDIDOS o APAGADOS. Los computadores sólo
1.2 MATÉMATICAS DE REDES 1.2.1 REPRESENTACIÓN BINARIA DE DATOS Los computadores manipulan y almacenan los datos usando interruptores electrónicos que están ENCENDIDOS o APAGADOS. Los computadores sólo
11 knúmero de publicación: 2 127 379. 51 kint. Cl. 6 : B25J 9/04
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 127 379 51 kint. Cl. 6 : B25J 9/04 B25J 9/10 B25J 18/00 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 127 379 51 kint. Cl. 6 : B25J 9/04 B25J 9/10 B25J 18/00 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea: