Estructura de un robot industrial
|
|
|
- Gonzalo Toledo Rubio
- hace 7 años
- Vistas:
Transcripción
1 Estructura de un robot industrial Componentes Características principales Configuraciones morfológicas del manipulador Componentes Como se adelantó en El sistema robótico, un robot está formado por los siguientes elementos: estructura mecánica, transmisiones, actuadores, sensores, elementos terminales y controlador. Aunque los elementos empleados en los robots no son exclusivos de estos (máquinas herramientas y otras muchas máquinas emplean tecnologías semejantes), las altas prestaciones que se exigen a los robots han motivado que en ellos se empleen elementos con características específicas. La constitución física de la mayor parte de los robots industriales guarda cierta similitud con la anatomía de las extremidades superiores del cuerpo humano, por lo que, en ocasiones, para hacer referencia a los distintos elementos que componen el robot, se usan términos como cintura, hombro, brazo, codo, muñeca, etc.

2 Los elementos que forman parte de la totalidad del robot son: manipulador controlador dispositivos de entrada y salida de datos dispositivos especiales Manipulador Mecánicamente, es el componente principal. Está formado por una serie de elementos estructurales sólidos o eslabones unidos mediante articulaciones que permiten un movimiento relativo entre cada dos eslabones consecutivos.

3 Las partes que conforman el manipulador reciben, entre otros, los nombres de: cuerpo, brazo, muñeca y actuador final (o elemento terminal). A este último se le conoce habitualmente como aprehensor, garra, pinza o gripper. Cada articulación provee al robot de, al menos, un grado de libertad. En otras palabras, las articulaciones permiten al manipulador realizar movimientos: Lineales que pueden ser horizontales o verticales.

4 Angulares (por articulación) (En los dos casos la línea roja representa la trayectoria seguida por el robot). Existen dos tipos de articulación utilizados en las juntas del manipulador: Prismática /Lineal - junta en la que el eslabón se apoya en un deslizador lineal. Actúa linealmente mediante los tornillos sinfín de los motores, o los cilindros. Rotacional - junta giratoria a menudo manejada por los motores eléctricos y las transmisiones, o por los cilindros hidráulicos y palancas.

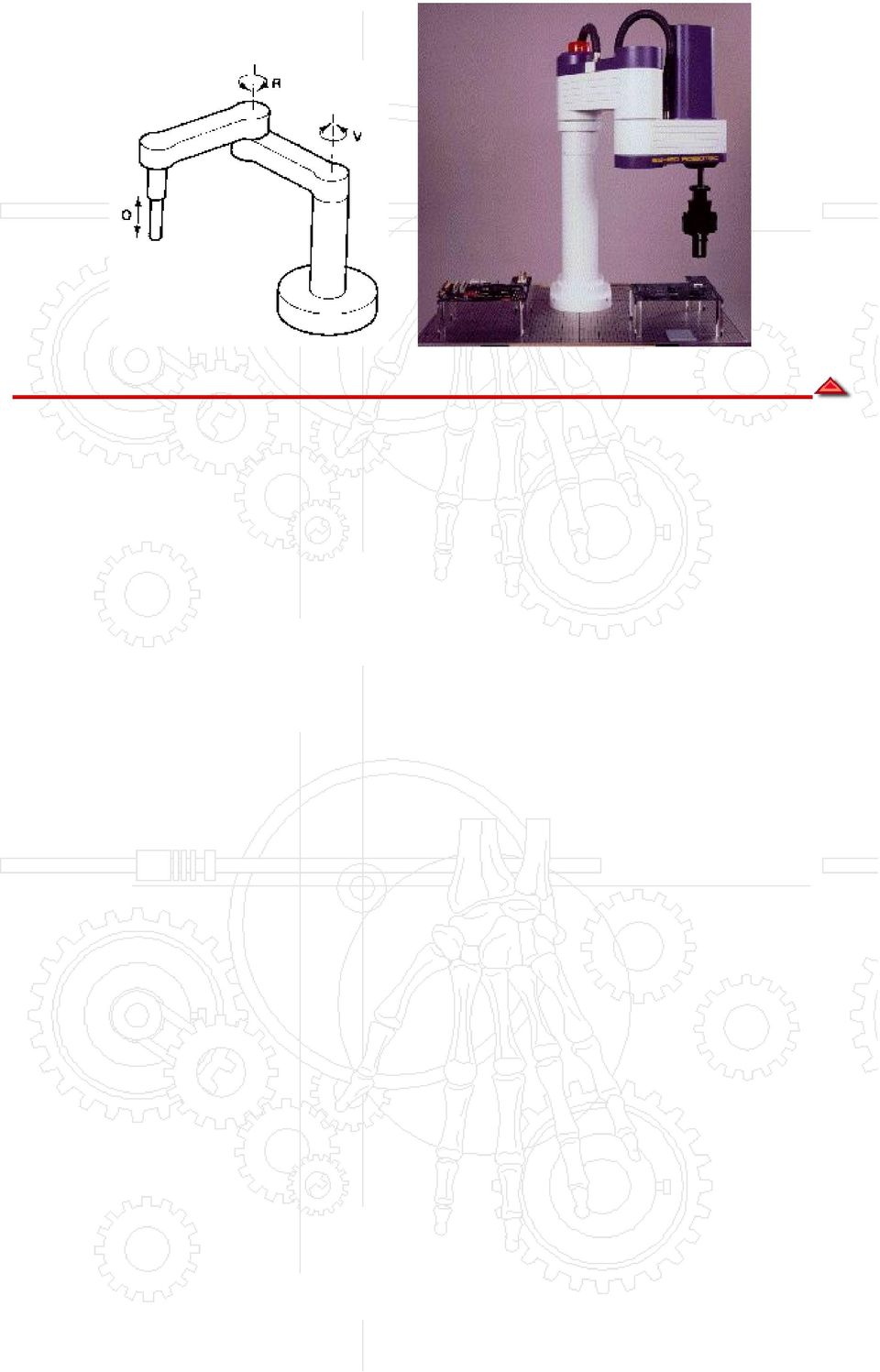
5 Básicamente, la orientación de un eslabón del manipulador se determina mediante los elementos roll, pitch y yaw A la muñeca de un manipulador le corresponden los siguientes movimientos o grados de libertad: giro (hand rotate), elevación (wrist flex) y desviación (wrist rotate) como lo muestra el modelo inferior, aunque cabe hacer notar que existen muñecas que no pueden realizar los tres tipos de movimiento.

6 El actuador final (gripper) es un dispositivo que se une a la muñeca del brazo del robot con la finalidad de activarlo para la realización de una tarea específica. La razón por la que existen distintos tipos de elementos terminales es, precisamente, por las funciones que realizan. Los diversos tipos podemos dividirlos en dos grandes categorías: pinzas y herramientas. Se denomina Punto de Centro de Herramienta (TCP, Tool Center Point) al punto focal de la pinza o herramienta. Por ejemplo, el TCP podría estar en la punta de una antorcha de la soldadura. Controlador Como su nombre indica, es el que regula cada uno de los movimientos del manipulador, las acciones, cálculos y procesado de la información. El controlador recibe y envía señales a otras máquinas-herramientas (por medio de señales de entrada/salida) y almacena programas. Existen varios grados de control que son función del tipo de parámetros que se regulan, lo que da lugar a los siguientes tipos de controladores: de posición: el controlador interviene únicamente en el control de la posición del elemento terminal; cinemático: en este caso el control se realiza sobre la posición y la velocidad; dinámico: además de regular la velocidad y la posición, controla las propiedades dinámicas del manipulador y de los elementos asociados a él; adaptativo: engloba todas las regulaciones anteriores y, además, se ocupa de controlar la variación de las características del manipulador al variar la posición Otra clasificación de control es la que distingue entre control en bucle abierto y control en bucle cerrado.

7 El control en bucle abierto da lugar a muchos errores, y aunque es más simple y económico que el control en bucle cerrado, no se admite en aplicaciones industriales en las que la exactitud es una cualidad imprescindible. La inmensa mayoría de los robots que hoy día se utilizan con fines industriales se controlan mediante un proceso en bucle cerrado, es decir, mediante un bucle de realimentación. Este control se lleva a cabo con el uso de un sensor de la posición real del elemento terminal del manipulador. La información recibida desde el sensor se compara con el valor inicial deseado y se actúa en función del error obtenido de forma tal que la posición real del brazo coincida con la que se había establecido inicialmente. Dispositivos de entrada y salida Los más comunes son: teclado, monitor y caja de comandos (teach pendant). En el dibujo se tiene un controlador (computer module) que envía señales a los motores de cada uno de los ejes del robot y la caja de comandos (teach pendant) la cual sirve para enseñarle las posiciones al manipulador del robot. La siguiente figura muestra un teach pendat para un tipo de robot industrial.

8 Los dispositivos de entrada y salida permiten introducir y, a su vez, ver los datos del controlador. Para mandar instrucciones al controlador y para dar de alta programas de control, comúnmente se utiliza una computadora adicional. Es necesario aclarar que algunos robots únicamente poseen uno de estos componentes. En estos casos, uno de los componentes de entrada y salida permite la realización de todas las funciones. Las señales de entrada y salida se obtienen mediante tarjetas electrónicas instaladas en el controlador del robot las cuales le permiten tener comunicación con otras máquinasherramientas Se pueden utilizan estas tarjetas para comunicar al robot, por ejemplo, con las máquinas de control numérico (torno,...). Estas tarjetas se componen de relevadores, los cuales mandan señales eléctricas que después son interpretadas en un programa de control. Estas señales nos permiten controlar cuándo debe entrar el robot a cargar una pieza a la máquina, cuando deben empezar a funcionar la máquina o el robot, etc. Dispositivos especiales Entre estos se encuentran los ejes que facilitan el movimiento transversal del manipulador y las estaciones de ensamblaje, que son utilizadas para sujetar las distintas piezas de trabajo.

9 En la estación del robot Move Master EX (Mitsubishi) representada en la figura se pueden encontrar los siguientes dispositivos especiales: A. Estación de posición sobre el transportador para la carga/descarga de piezas de trabajo. B. Eje transversal para aumentar el volumen de trabajo del robot. C. Estación de inspección por computadora integrada con el robot. D. Estación de ensamble. El robot cuenta con señales de entrada/salida para poder realizar la integración de su función incorporando estos elementos. Principales características de los Robots A continuación se describen las características más relevantes propias de los robots y se proporcionan valores concretos de las mismas, para determinados modelos y aplicaciones. Grados de libertad Espacio de trabajo Precisión de los movimientos Capacidad de carga Velocidad Tipo de actuadores Programabilidad Grados de libertad (GDL) Cada uno de los movimientos independientes (giros y desplazamientos) que puede realizar cada articulación con respecto a la anterior. Son los parámetros que se precisan para determinar la posición y la orientación del elemento terminal del manipulador. El número de grados de libertad del robot viene dado por la suma de los GDL de las articulaciones que lo componen. Puesto que las articulaciones empleadas suelen ser únicamente de rotación y prismáticas, con un solo grado de libertad cada una, el número de GDL del robot suele coincidir con el número de articulaciones que lo componen. Puesto que para posicionar y orientar un cuerpo de cualquier manera en el espacio son necesarios seis parámetros, tres para definir la posición y tres para la orientación, si se pretende que un robot posicione y oriente su extremo (y con él la pieza o herramienta manipulada) de cualquier modo en el espacio, se precisará al menos seis grados de libertad.

10 En la imagen se muestra el esquema de un robot de estructura moderna con 6 GDL; tres de ellos determinan la posición del aprehensor en el espacio (q1, q2 y q3) y los otros 3, la orientación del mismo (q4, q5 y q6). Un mayor numero de grados de libertad conlleva un aumento de la flexibilidad en el posicionamiento del elemento terminal. Aunque la mayoría de las aplicaciones industriales requieren 6 GDL, como las de la soldadura, mecanizado y paletización, otras más complejas requieren un número mayor, tal es el caso en las labores de montaje. Si se trabaja en un entorno con obstáculos, el dotar al robot de grados de libertad adicionales le permitirá acceder a posiciones y orientaciones de su extremo a las que, como consecuencia de los obstáculos, no hubieran llegado con seis grados de libertad. Otra situación frecuente es dotar al robot de un grado de libertad adicional que le permita desplazarse a lo largo de un carril aumentando así el volumen del espacio al que puede acceder. Tareas más sencillas y con movimientos más limitados, como las de la pintura y paletización, suelen exigir 4 o 5 GDL. Cuando el numero de grados de libertad del robot es mayor que los necesarios para realizar una determinada tarea se dicen que el robot es redundante. Observando los movimientos del brazo y de la muñeca, podemos determinar el número de grados de libertad que presenta un robot. Generalmente, tanto en el brazo como en la muñeca, se encuentra un abanico que va desde uno hasta los tres GDL. Los grados de libertad del brazo de un manipulador están directamente relacionados con su anatomía o configuración. Espacio (volumen) de trabajo Las dimensiones de los elementos del manipulador, junto a los grados de libertad, definen la zona de trabajo del robot, característica fundamental en las fases de selección e implantación del modelo adecuado. La zona de trabajo se subdivide en áreas diferenciadas entre sí, por la accesibilidad especifica del elemento terminal (aprehensor o herramienta), es diferente a la que permite orientarlo verticalmente o con el determinado ángulo de inclinación. También queda restringida la zona de trabajo por los limites de giro y desplazamiento que existen en las articulaciones. El volumen de trabajo de un robot se refiere únicamente al espacio dentro del cual puede desplazarse el extremo de su muñeca. Para determinar el volumen de trabajo no se toma en cuenta el actuador final. La razón de ello es que a la muñeca del robot se le pueden adaptar grippers de distintos tamaños. Para ilustrar lo que se conoce como volumen de trabajo regular y volumen de trabajo irregular, tomaremos como modelos varios robots.

11 El robot cartesiano y el robot cilíndrico presentan volúmenes de trabajo regulares. El robot cartesiano genera una figura cúbica. El robot de configuración cilíndrica presenta un volumen de trabajo parecido a un cilindro (normalmente este robot no tiene una rotación de 360 ) Por su parte, los robots que poseen una configuración polar, los de brazo articulado y los modelos SCARA presentan un volumen de trabajo irregular. Para determinar el volumen de trabajo de un robot industrial, el fabricante generalmente indica un plano con los límites de movimiento que tiene cada una de las articulaciones del robot, como en el siguiente caso:

12 Precisión de los movimientos La precisión de movimiento en un robot industrial depende de tres factores: resolución espacial exactitud repetibilidad La resolución espacial se define como el incremento más pequeño de movimiento en que el robot puede dividir su volumen de trabajo. Para explicar con mayor precisión el término resolución espacial tomemos el siguiente ejemplo: En el dibujo anterior supongamos que utilizando el teach pendant movemos el robot de P1 al P2. P2-P1 representa el menor incremento con el que se puede mover el robot a partir de P1. Si vemos estos incrementos en un plano se vería como una cuadricula. En cada intersección de líneas se encuentra un punto "direccionable", es decir un punto que puede ser alcanzado por el robot. De esta forma la resolución espacial puede definirse también como la distancia entre dos puntos adyacentes (en la figura la distancia entre puntos está muy exagerada a efectos de explicar el término). Estos puntos están típicamente separados por un milímetro o menos, dependiendo del tipo de robot. La resolución espacial depende de dos factores: los sistemas que controlan la resolución y las inexactitudes mecánicas. Depende del control del sistema porque éste, precisamente, es el medio para controlar todos los incrementos individuales de una articulación. Los controladores dividen el intervalo total de movimiento para una junta particular en incrementos individuales (resolución de control o de mando). La habilidad de dividir el rango de la junta en incrementos depende de la capacidad de almacenamiento en la memoria de mando. El número de incrementos separados e identificables para un eje particular es: 2 n. Por ejemplo, en un robot con n=8 la resolución de mando puede dividir el

13 intervalo del movimiento en 256 posiciones discretas. Así, la resolución de mando es: intervalo de movimiento/256. Los incrementos casi siempre son uniformes. Las inexactitudes mecánicas se encuentran estrechamente relacionadas con la calidad de los componentes que conforman las uniones y las articulaciones. Como ejemplos de inexactitudes mecánicas pueden citarse la holgura de los engranajes, las tensiones en las poleas, las fugas de fluidos, etcétera. La exactitud se refiere a la capacidad de un robot para situar el extremo de su muñeca en un punto señalado dentro del volumen de trabajo. Mide la distancia entre la posición especificada, y la posición real del actuador terminal del robot. Mantiene una relación directa con la resolución espacial, es decir, con la capacidad del control del robot de dividir en incrementos muy pequeños el volumen de trabajo. En el siguiente dibujo, si quisiéramos mover el robot exactamente al punto donde se encuentra la pieza de trabajo, el robot solamente podría acercarse al objeto posicionándose en el punto direccionable más próximo. En otras palabras, no podría colocarse exactamente en la posición requerida. Un robot presenta una mayor exactitud cuando su brazo opera cerca de la base. A medida que el brazo se aleja de la base, la exactitud se irá haciendo menor. Esto se debe a que las inexactitudes mecánicas se incrementan al ser extendido el brazo. Otro factor que afecta a la exactitud es el peso de la carga; las cargas más pesadas reducen la exactitud (al incrementar las inexactitudes mecánicas). El peso de la carga también afecta la velocidad de los movimientos del brazo y la resistencia mecánica. Si las inexactitudes mecánicas son despreciables la Exactitud = resolución de mando/2 La repetibilidad, se refiere a la capacidad del robot de regresar al punto programado las veces que sean necesarias. Esta magnitud establece el grado de exactitud en la

14 repetición de los movimientos de un manipulador al realizar una tarea programada. En el dibujo anterior al robot se le indicó mediante un comando de programación que regresara al punto PP (punto programado). El robot se puede colocar en el punto de regreso (PR) o en otro punto de regreso que tenga la misma distancia hacia PP. En el dibujo la diferencia entre los puntos PP y PR está muy exagerada. Dependiendo del trabajo que se deba realizar, la precisión en la repetibilidad de los movimientos es mayor o menor. Así por ejemplo, en labores de ensamblaje de piezas, dicha característica ha de ser menor a ±0.1 mm. En soldadura, pintura y manipulación de piezas, la precisión en la repetibilidad esta comprendida entre 1 y 3 mm y en las operaciones de mecanizado, la precisión ha de ser menor de 1mm. La repetibilidad de punto es a menudo más pequeña que la exactitud. Comentarios: Los errores al azar (fricción, torcimiento estructural, la dilatación térmica,...), que aumentan conforme el robot opera e impiden al robot volver a la misma situación exacta, pueden asociarse a una distribución de probabilidad sobre cada punto.

15 En una situación mecánica perfecta, la exactitud y la resolución del mando se determinarían como a continuación: Puntos significativos para la determinación de la precisión: Capacidad de carga

16 El peso, en kilogramos, que puede transportar la garra del manipulador recibe el nombre de capacidad de carga. A veces, este dato lo proporcionan los fabricantes, incluyendo el peso de la propia garra. En modelos de robots indústriales, la capacidad de carga de la garra, puede oscilar de entre 205kg. y 0.9Kg. La capacidad de carga es una de las características que más se tienen en cuenta en la selección de un robot, según la tarea a la que se destine. En soldadura y mecanizado es común precisar capacidades de carga superiores a los 50kg. Velocidad Se refiere a la velocidad máxima alcanzable por el TCP o por las articulaciones. En muchas ocasiones, una velocidad de trabajo elevada, aumenta extraordinariamente el rendimiento del robot, por lo que esta magnitud se valora considerablemente en la elección del mismo. En tareas de soldadura y manipulación de piezas es muy aconsejable que la velocidad de trabajo sea alta. En pintura, mecanizado y ensamblaje, la velocidad debe ser media e incluso baja. Tipo de actuadores Los elementos motrices que generan el movimiento de las articulaciones pueden ser, según la energía que consuman, de tipo olehidráulico, neumático o eléctrico. Los actuadores de tipo olehidráulico se destinan a tareas que requieren una gran potencia y grandes capacidades de carga. Dado el tipo de energía que emplean, se construyen con mecánica de precisión y su coste es elevado. Los robots hidráulicos se diseñan formando un conjunto compacto la central hidráulica, la cabina electrónica de control y el brazo del manipulador. La energía neumática dota a sus actuadores de una gran velocidad de respuesta junto a un bajo coste, pero su empleo está siendo sustituido por elementos eléctricos. Los motores eléctricos, que cubren la gama de media y baja potencia, acaparan el campo de la Robótica, por su gran precisión en el control de su movimiento y las ventajas inherentes a la energía eléctrica que consumen. Programabilidad La inclusión del controlador de tipo microelectrónica en los robots industriales, permite la programación del robot de muy diversas formas. En general, los modernos sistemas de robots admiten la programación manual, mediante un modulo de programación. Las programaciones gestual y textual, controlan diversos aspectos del funcionamiento del manipulador: - Control de la velocidad y la aceleración. - Saltos de programa condicionales. - Temporizaciones y pausas.

17 - Edición, modificación, depuración y ampliación de programas. - Funciones de seguridad. - Funciones de sincronización con otras maquinas. - Uso de lenguajes específicos de Robótica. Tipos de configuraciones morfológicas La estructura del manipulador y la relación entre sus elementos proporcionan una configuración mecánica, que da origen al establecimiento de los parámetros que hay que conocer para definir la posición y orientación del elemento terminal. Fundamentalmente, existen cuatro estructuras clásicas en los manipuladores, que se relacionan con los correspondientes modelos de coordenadas en el espacio y que se citan a continuación: cartesianas, cilíndricas, esféricas, angulares. Así, el brazo del manipulador puede presentar cuatro configuraciones clásicas: cartesiana cilíndrica esférica de brazo articulado, y una no clásica: SCARA (Selective Compliance Assembly Robot Arm). El empleo de diferentes combinaciones de articulaciones en un robot, da lugar a diferentes configuraciones, con características a tener en cuenta tanto en el diseño y construcción del robot como en su aplicación. Las combinaciones más frecuentes son con tres articulaciones, que son las más importantes a la hora de posicionar su extremo en un punto en el espacio. A continuación se presentan las características principales de las configuraciones del brazo manipulador. Cartesiana / Rectilínea -El posicionando se hace en el espacio de trabajo con las articulaciones prismáticas. Esta configuración se usa bien cuando un espacio de trabajo es grande y debe cubrirse, o cuando la exactitud consiste en la espera del robot. Posee tres movimientos lineales, es decir, tiene tres grados de libertad, los cuales corresponden a los movimientos localizados en los ejes X, Y y Z. Los movimientos que realiza este robot entre un punto y otro son con base en interpolaciones lineales. Interpolación, en este caso, significa el tipo de trayectoria que realiza el manipulador cuando se desplaza entre un punto y otro. A la trayectoria realizada en línea recta se le conoce como interpolación lineal y a la trayectoria hecha de acuerdo con el tipo de movimientos que tienen sus articulaciones se le llama interpolación por articulación.

18 Cilíndrica - El robot tiene un movimiento de rotación sobre una base, una articulación prismática para la altura, y una prismática para el radio. Este robot ajusta bien a los espacios de trabajo redondos. Puede realizar dos movimientos lineales y uno rotacional, o sea, que presenta tres grados de libertad. Este robot está diseñado para ejecutar los movimientos conocidos como interpolación lineal e interpolación por articulación. La interpolación por articulación se lleva a cabo por medio de la primera articulación, ya que ésta puede realizar un movimiento rotacional. Esférica / Polar - Dos juntas de rotación y una prismática permiten al robot apuntar en muchas direcciones, y extender la mano a un poco de distancia radial. Los movimientos son: rotacional, angular y lineal. Este robot utiliza la interpolación por articulación para moverse en sus dos primeras articulaciones y la interpolación lineal para la extensión y retracción.

19 de Brazo articulado / Articulación esférica / Articulación coordinada / Rotación / Angular - El robot usa 3 juntas de rotación para posicionarse. Generalmente, el volumen de trabajo es esférico. Estos tipos de robot se parecen al brazo humano, con una cintura, el hombro, el codo, la muñeca. Presenta una articulación con movimiento rotacional y dos angulares. Aunque el brazo articulado puede realizar el movimiento llamado interpolación lineal (para lo cual requiere mover simultáneamente dos o tres de sus articulaciones), el movimiento natural es el de interpolación por articulación, tanto rotacional como angular. SCARA - Similar al de configuración cilíndrica, pero el radio y la rotación se obtiene por uno o dos eslabones. Este brazo puede realizar movimientos horizontales de mayor alcance debido a sus dos articulaciones rotacionales. El robot de configuración SCARA también puede hacer un movimiento lineal (mediante su tercera articulación).

20
TECNOLOGICO NACIONAL DE MEXICO
 TECNOLOGICO NACIONAL DE MEXICO INSTITUTO TECNOLOGICO DE VERACRUZ ROBOTICA CLAVE 9F1A DR. JOSE ANTONIO GARRIDO NATAREN ING. MECATRONICA EQUIPO I UNIDAD I MORFOLOGIA DEL ROBOT 1.2 ESTRUCTURA MECANICA DE
TECNOLOGICO NACIONAL DE MEXICO INSTITUTO TECNOLOGICO DE VERACRUZ ROBOTICA CLAVE 9F1A DR. JOSE ANTONIO GARRIDO NATAREN ING. MECATRONICA EQUIPO I UNIDAD I MORFOLOGIA DEL ROBOT 1.2 ESTRUCTURA MECANICA DE
Robótica: programación con RobotStudio ABB
 Tecnologías, Información y Cultura Europea Robótica: programación con RobotStudio ABB Moisès Serra Juli Ordeix Jordi Serra 13 de octubre de 2011 www.uvic.cat Índice Conceptos de robótica Antecedentes y
Tecnologías, Información y Cultura Europea Robótica: programación con RobotStudio ABB Moisès Serra Juli Ordeix Jordi Serra 13 de octubre de 2011 www.uvic.cat Índice Conceptos de robótica Antecedentes y
SECRETARÍA DE EDUCACIÓN PÚBLICA TECNOLÓGICA NACIONAL DE MÉXICO INSTITUTIO TECNOLÓGICO DE VERACRUZ
 SECRETARÍA DE EDUCACIÓN PÚBLICA TECNOLÓGICA NACIONAL DE MÉXICO INSTITUTIO TECNOLÓGICO DE VERACRUZ Robótica Dr. José Antonio Garrido Natarén INGENIERÍA MECATRÓNICA Unidad 1 Morfología del robot 1.8 Grados
SECRETARÍA DE EDUCACIÓN PÚBLICA TECNOLÓGICA NACIONAL DE MÉXICO INSTITUTIO TECNOLÓGICO DE VERACRUZ Robótica Dr. José Antonio Garrido Natarén INGENIERÍA MECATRÓNICA Unidad 1 Morfología del robot 1.8 Grados
Experto en Robots Industriales. Instalación, Mantenimiento y Fabricación Mecánica
 Experto en Robots Industriales Instalación, Mantenimiento y Fabricación Mecánica Ficha Técnica Categoría Instalación, Mantenimiento y Fabricación Mecánica Referencia 165707-1501 Precio 42.36 Euros Sinopsis
Experto en Robots Industriales Instalación, Mantenimiento y Fabricación Mecánica Ficha Técnica Categoría Instalación, Mantenimiento y Fabricación Mecánica Referencia 165707-1501 Precio 42.36 Euros Sinopsis
Guía del Curso Experto en Robots Industriales
 Guía del Curso Experto en Robots Industriales Modalidad de realización del curso: Número de Horas: Titulación: A distancia y Online 120 Horas Diploma acreditativo con las horas del curso OBJETIVOS El término
Guía del Curso Experto en Robots Industriales Modalidad de realización del curso: Número de Horas: Titulación: A distancia y Online 120 Horas Diploma acreditativo con las horas del curso OBJETIVOS El término
Clasificación de los robots según la AFRI (Asociación Francesa de Robótica Industrial) Manipulador con control manual o telemando.
 Manipulador con control manual o telemando.") Tabla 1.1 Tipo A Clasificación de los robots según la AFRI (Asociación Francesa de Robótica Industrial) Manipulador con control manual o telemando. Tabla 1.1 Tipo A Tipo B Clasificación de los robots según
Tabla 1.1 Tipo A Clasificación de los robots según la AFRI (Asociación Francesa de Robótica Industrial) Manipulador con control manual o telemando. Tabla 1.1 Tipo A Tipo B Clasificación de los robots según
Características Morfológicas. Principales características de los Robots.
 Características Morfológicas Principales características de los Robots. Se describen las características más relevantes propias de los robots y se proporcionan valores concretos de las mismas, para determinados
Características Morfológicas Principales características de los Robots. Se describen las características más relevantes propias de los robots y se proporcionan valores concretos de las mismas, para determinados
Robótica Industrial. Puede aumentar la rentabilidad de mi empresa? 12/05/2017. La Robótica en los procesos industriales. Evolución de la industria
 Robótica Industrial Puede aumentar la rentabilidad de mi empresa? Ing. Alberto Kremer Evolución de la industria Automatización Robótica y TI Energía eléctrica Producción en cadena Hiperconectividad Internet
Robótica Industrial Puede aumentar la rentabilidad de mi empresa? Ing. Alberto Kremer Evolución de la industria Automatización Robótica y TI Energía eléctrica Producción en cadena Hiperconectividad Internet
Introducción. TEMA 2. MORFOLOGÍA
 2.1 Introducción TEMA 2. MORFOLOGÍA Introducción. Estructura mecánica. Estructura cinemática. Tipos de articulaciones. Configuraciones cinemáticas. Precisión de movimientos. 1 Introducción La configuración
2.1 Introducción TEMA 2. MORFOLOGÍA Introducción. Estructura mecánica. Estructura cinemática. Tipos de articulaciones. Configuraciones cinemáticas. Precisión de movimientos. 1 Introducción La configuración
3. SECCIÓN DE MOTORES A PASOS
 3. SECCIÓN DE MOTORES A PASOS En nuestros días los motores paso a paso tienen una amplia gama de aplicaciones; esto es debido a que poseen una gran precisión. Esta es la característica que fue determinante
3. SECCIÓN DE MOTORES A PASOS En nuestros días los motores paso a paso tienen una amplia gama de aplicaciones; esto es debido a que poseen una gran precisión. Esta es la característica que fue determinante
Dpto. Física y Mecánica. mecanismos. Elvira Martínez Ramírez
 Dpto. Física y Mecánica Las máquinas y los mecanismos Elvira Martínez Ramírez Las máquinas y mecanismos, desde los más sencillos a los más complejos y tienen un fin común que es reducir el esfuerzo para
Dpto. Física y Mecánica Las máquinas y los mecanismos Elvira Martínez Ramírez Las máquinas y mecanismos, desde los más sencillos a los más complejos y tienen un fin común que es reducir el esfuerzo para
Robótica Dr. José Antonio Garrido Natarén INGENIERÍA MECATRÓNICA. Unidad 1.- Morfología del robot. 1.2 Estructura mecánica de los robots.
 SECRETARÍA DE EDUCACIÓN PÚBLICA TECNOLÓGICA NACIONAL DE MÉXICO INSTITUTIO TECNOLÓGICO DE VERACRUZ Robótica Dr. José Antonio Garrido Natarén INGENIERÍA MECATRÓNICA Unidad 1.- Morfología del robot 1.2 Estructura
SECRETARÍA DE EDUCACIÓN PÚBLICA TECNOLÓGICA NACIONAL DE MÉXICO INSTITUTIO TECNOLÓGICO DE VERACRUZ Robótica Dr. José Antonio Garrido Natarén INGENIERÍA MECATRÓNICA Unidad 1.- Morfología del robot 1.2 Estructura
Diseño Mecánico (Engranajes) Juan Manuel Rodríguez Prieto Ing. M.Sc. Ph.D.
 Juan Manuel Rodríguez Prieto Ing. M.Sc. Ph.D.") Diseño Mecánico (Engranajes) Juan Manuel Rodríguez Prieto Ing. M.Sc. Ph.D. Engranajes 1. Tipos de engranaje 2. Nomenclatura 3. Acción conjugada 4. Propiedades de la involuta 5. Fundamentos 6. Relación
Diseño Mecánico (Engranajes) Juan Manuel Rodríguez Prieto Ing. M.Sc. Ph.D. Engranajes 1. Tipos de engranaje 2. Nomenclatura 3. Acción conjugada 4. Propiedades de la involuta 5. Fundamentos 6. Relación
APUNTES DE MECANISMOS E.S.O.
 APUNTES DE MECANISMOS E.S.O. DEPARTAMENTO DE TECNOLOGÍA 1 INTRODUCCIÓN MECANISMOS Si observamos a nuestro alrededor, observaremos que estamos rodeados de objetos que se mueven o tienen capacidad de movimiento.
APUNTES DE MECANISMOS E.S.O. DEPARTAMENTO DE TECNOLOGÍA 1 INTRODUCCIÓN MECANISMOS Si observamos a nuestro alrededor, observaremos que estamos rodeados de objetos que se mueven o tienen capacidad de movimiento.
CINEMÁTICA INVERSA DE ROBOTS INDUSTRIALES
 I EMETRE DE 00 CINEMÁTICA INVERA DE ROBOT INDUTRIALE GERMÁN ANDRÉ RAMO FUENTE * 1. Introducción El uso de robots en ambientes industriales, y más precisamente en procesos de manufactura, ha generado toda
I EMETRE DE 00 CINEMÁTICA INVERA DE ROBOT INDUTRIALE GERMÁN ANDRÉ RAMO FUENTE * 1. Introducción El uso de robots en ambientes industriales, y más precisamente en procesos de manufactura, ha generado toda
Introducción Definición de control. Introducción Antecedentes Históricos
 Introducción Definición de control Se puede definir control como la manipulación indirecta de las magnitudes de un sistema llamado planta a través de otro sistema llamado sistema de control SISTEMA DE
Introducción Definición de control Se puede definir control como la manipulación indirecta de las magnitudes de un sistema llamado planta a través de otro sistema llamado sistema de control SISTEMA DE
Robótica. TEMA 3: ROBOTS MANIPULADORES INDUSTRIALES Martin Mellado
 Robótica TEMA 3: ROBOTS MANIPULADORES INDUSTRIALES Martin Mellado (martin@isa.upv.es) Departamento de Ingeniería de Sistemas y Automática (DISA) Facultad de Informática de Valencia (FIV) Universidad Politécnica
Robótica TEMA 3: ROBOTS MANIPULADORES INDUSTRIALES Martin Mellado (martin@isa.upv.es) Departamento de Ingeniería de Sistemas y Automática (DISA) Facultad de Informática de Valencia (FIV) Universidad Politécnica
Servocontrolado, control de trayectoria. Gestual, textual. Industrial, medico, militar, entretenimiento
 1 ARQUITECTURA Androides, zoomórficos,móviles,poliarticulados NIVEL DE INTELIGENCIA Manejo manual, secuencia arreglada secuencia variable, control numérico, play back, inteligentes METODO DE CONTROL Servocontrolado,
1 ARQUITECTURA Androides, zoomórficos,móviles,poliarticulados NIVEL DE INTELIGENCIA Manejo manual, secuencia arreglada secuencia variable, control numérico, play back, inteligentes METODO DE CONTROL Servocontrolado,
ya que se han desarrollado en diversos campos. En la industria los podemos encontrar en
 CAPÍTULO 1 Antecedentes Actualmente los robots ocupan un aspecto muy importante dentro de la ingeniería ya que se han desarrollado en diversos campos. En la industria los podemos encontrar en una gran
CAPÍTULO 1 Antecedentes Actualmente los robots ocupan un aspecto muy importante dentro de la ingeniería ya que se han desarrollado en diversos campos. En la industria los podemos encontrar en una gran
sistemas de control para después pasar a su configuración. Los sistemas de control forman
 CAPÍTULO 2 Sistemas de Control Una vez analizadas las características de las partes del robot, se estudiarán los sistemas de control para después pasar a su configuración. Los sistemas de control forman
CAPÍTULO 2 Sistemas de Control Una vez analizadas las características de las partes del robot, se estudiarán los sistemas de control para después pasar a su configuración. Los sistemas de control forman
Tutorial sobre Motores Paso a Paso (Stepper motors)
") Tutorial sobre Motores Paso a Paso (Stepper motors) Los motores paso a paso son ideales para la construcción de mecanismos en donde se requieren movimientos muy precisos. La característica principal de
Tutorial sobre Motores Paso a Paso (Stepper motors) Los motores paso a paso son ideales para la construcción de mecanismos en donde se requieren movimientos muy precisos. La característica principal de
CONTROL Y PROGRAMACIÓN DE ROBOTS
 CONTROL Y PROGRAMACIÓN DE ROBOTS Año académico: 2006-2007 Centro: Escuela Politécnica Superior Estudios: Ingeniero Técnico en Informática de Sistemas Asignatura: Control y programación de robots Ciclo:
CONTROL Y PROGRAMACIÓN DE ROBOTS Año académico: 2006-2007 Centro: Escuela Politécnica Superior Estudios: Ingeniero Técnico en Informática de Sistemas Asignatura: Control y programación de robots Ciclo:
21. LA MOTONIVELADORA.
 21. LA MOTONIVELADORA. 21.1 INTRODUCCIÓN. La motoniveladora es una máquina especialmente concebida, diseñada y construida para ejecutar excavaciones de precisión tales como las correspondientes al cereo
21. LA MOTONIVELADORA. 21.1 INTRODUCCIÓN. La motoniveladora es una máquina especialmente concebida, diseñada y construida para ejecutar excavaciones de precisión tales como las correspondientes al cereo
Selección de un Robot Industrial. Prof. J. Milland
 Prof. J. Milland Si debemos robotizar un determinado proceso, debemos seleccionar el robot mas adecuado teniendo en consideración los servicios y el costo. Las características que debemos estar estudiando
Prof. J. Milland Si debemos robotizar un determinado proceso, debemos seleccionar el robot mas adecuado teniendo en consideración los servicios y el costo. Las características que debemos estar estudiando
Unidad de Promoción y Desarrollo Guadiana OBJETIVO GENERAL
 Unidad de Promoción y Desarrollo Guadiana OBJETIVO GENERAL Conocer los elementos básicos de un ordenador, identificar sus elementos principales, diferenciando aquellos que forman parte de su hardware y
Unidad de Promoción y Desarrollo Guadiana OBJETIVO GENERAL Conocer los elementos básicos de un ordenador, identificar sus elementos principales, diferenciando aquellos que forman parte de su hardware y
Programación de Máquinas a Control Numérico
 Programación de Máquinas a Control Numérico Maquina a Control Numérico moderna Interior Estructuras Principales Plato Carros Longitudinal y Transversal Torreta Portaherramientas Portaherramientas Flujo
Programación de Máquinas a Control Numérico Maquina a Control Numérico moderna Interior Estructuras Principales Plato Carros Longitudinal y Transversal Torreta Portaherramientas Portaherramientas Flujo
TURBINAS KAPLAN. Prof. Ing. Cesar Sanabria FACULTAD DE INGENIERIA UNA
 TURBINAS KAPLAN Prof. Ing. Cesar Sanabria Generalidades Las turbinas tipo Kaplan son turbinas de admisión total y clasificadas como turbinas de reacción Se emplean en saltos de pequeña altura (alrededor
TURBINAS KAPLAN Prof. Ing. Cesar Sanabria Generalidades Las turbinas tipo Kaplan son turbinas de admisión total y clasificadas como turbinas de reacción Se emplean en saltos de pequeña altura (alrededor
UNIVERSIDAD ALONSO DE OJEDA FACULTAD DE INGENIERÍA ESCUELA DE INDUSTRIAL ASIGNATURA: GENERACIÓN DE POTENCIA
 UNIVERSIDAD ALONSO DE OJEDA FACULTAD DE INGENIERÍA ESCUELA DE INDUSTRIAL ASIGNATURA: GENERACIÓN DE POTENCIA INTRODUCCIÓN IMPORTANCIA DE LA GENERACIÓN DE POTENCIA ASPECTOS FUNDAMENTALES TIPOS DE PLANTAS
UNIVERSIDAD ALONSO DE OJEDA FACULTAD DE INGENIERÍA ESCUELA DE INDUSTRIAL ASIGNATURA: GENERACIÓN DE POTENCIA INTRODUCCIÓN IMPORTANCIA DE LA GENERACIÓN DE POTENCIA ASPECTOS FUNDAMENTALES TIPOS DE PLANTAS
Cuando la masa es máxima y la aceleración tiende al mínimo (como la halterofilia).
.") Autor: DESARROLLO DE LA FUERZA DEFINICIÓN DE FUERZA Es la capacidad de vencer una resistencia con la contracción producida por los músculos, es decir, con la capacidad que tienen de realizar un trabajo.
Autor: DESARROLLO DE LA FUERZA DEFINICIÓN DE FUERZA Es la capacidad de vencer una resistencia con la contracción producida por los músculos, es decir, con la capacidad que tienen de realizar un trabajo.
UNIDAD III ARQUITECTURA DE CONTROL DE ROBOTS INDUSTRIALES
 UNIVERSIDAD TECNICA DE AMBATO UNIDAD II COMPONENTES FACULTAD DE INGENIERIA DE LA ESTRUCTURA EN SISTEMAS, ELECTRONICA MECANICA E INDUSTRIAL MODULO DE ROBOTICA INDUSTRIAL UNIDAD III ARQUITECTURA DE CONTROL
UNIVERSIDAD TECNICA DE AMBATO UNIDAD II COMPONENTES FACULTAD DE INGENIERIA DE LA ESTRUCTURA EN SISTEMAS, ELECTRONICA MECANICA E INDUSTRIAL MODULO DE ROBOTICA INDUSTRIAL UNIDAD III ARQUITECTURA DE CONTROL
PREGUNTAS MÁS FRECUENTES Arrancadores suaves
 PREGUNTAS MÁS FRECUENTES Arrancadores suaves 1/5 Qué son los contactores principales? Los arrancadores suaves pueden instalarse con o sin un contactor principal. Un contactor principal: Puede ser necesario
PREGUNTAS MÁS FRECUENTES Arrancadores suaves 1/5 Qué son los contactores principales? Los arrancadores suaves pueden instalarse con o sin un contactor principal. Un contactor principal: Puede ser necesario
4. Mecánica Rotacional
 4. Mecánica Rotacional Cinemática Rotacional: (Conceptos básicos) Radián Velocidad angular Aceleración angular Frecuencia y período Velocidad tangencial Aceleración tangencial Aceleración centrípeta Torca
4. Mecánica Rotacional Cinemática Rotacional: (Conceptos básicos) Radián Velocidad angular Aceleración angular Frecuencia y período Velocidad tangencial Aceleración tangencial Aceleración centrípeta Torca
Sistemas Mecánicos II Unidad 1
 Sistemas Mecánicos II Unidad 1 El propósito de un rodamiento es el de proporcionar una posición relativa y libertad de rotación, además de transmitir una carga entre dos estructuras. Clasificación Rodamientos
Sistemas Mecánicos II Unidad 1 El propósito de un rodamiento es el de proporcionar una posición relativa y libertad de rotación, además de transmitir una carga entre dos estructuras. Clasificación Rodamientos
11 Número de publicación: 1 056 525. 21 Número de solicitud: U 200400053. 51 Int. Cl. 7 : A01K 73/04. 71 Solicitante/s: Alfredo Piñeiro Pérez
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 1 056 525 21 Número de solicitud: U 200400053 51 Int. Cl. 7 : A01K 73/04 12 SOLICITUD DE MODELO DE UTILIDAD U 22 Fecha de presentación:
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 1 056 525 21 Número de solicitud: U 200400053 51 Int. Cl. 7 : A01K 73/04 12 SOLICITUD DE MODELO DE UTILIDAD U 22 Fecha de presentación:
11. Desgaste de herramientas. Contenido: 1. Desgaste de herramientas 2. Medida del desgaste 3. Ensayos de duración de herramientas
 11. Desgaste de herramientas Contenido: 1. Desgaste de herramientas 2. Medida del desgaste 3. Ensayos de duración de herramientas Desgaste de herramientas La herramienta durante su trabajo está sometida
11. Desgaste de herramientas Contenido: 1. Desgaste de herramientas 2. Medida del desgaste 3. Ensayos de duración de herramientas Desgaste de herramientas La herramienta durante su trabajo está sometida
APUNTES ROBÓTICA. Javier García Cela 1
 APUNTES ROBÓTICA Javier García Cela 1 Introducción Al oír la palabra robot, a menudo se produce en nuestra mente la imagen de una máquina con forma humana, con cabeza y extremidades. Esta asociación es
APUNTES ROBÓTICA Javier García Cela 1 Introducción Al oír la palabra robot, a menudo se produce en nuestra mente la imagen de una máquina con forma humana, con cabeza y extremidades. Esta asociación es
AFILADORAS UNIVERSALES CON 6 EJES CNC
 AFILADORAS UNIVERSALES CON 6 EJES CNC Cubierta cónica con disminución en S Disminución en U 4 Caras con disminución en S 4 caras con disminución en X Broca para centrado Broca de 3 labios Broca escalonada
AFILADORAS UNIVERSALES CON 6 EJES CNC Cubierta cónica con disminución en S Disminución en U 4 Caras con disminución en S 4 caras con disminución en X Broca para centrado Broca de 3 labios Broca escalonada
Tipos de robots industriales según su aplicación
 8 Tipos de robots industriales según su aplicación Los robots industriales son robots que se emplean para tareas vinculadas con la producción de bienes de origen manufacturado en fabricas o industrias.
8 Tipos de robots industriales según su aplicación Los robots industriales son robots que se emplean para tareas vinculadas con la producción de bienes de origen manufacturado en fabricas o industrias.
8.1 VENTAJAS Y DESVENTAJAS DE LOS FOTOGRAMAS
 8. FOTOGRAFÍA AÉREA Desde la invención de la fotografía, cerca de 1840, la gente ha usado la fotografía (o ha elaborado dibujos) para confeccionar mapas o usarla como mapas. Normalmente se emplea la palabra
8. FOTOGRAFÍA AÉREA Desde la invención de la fotografía, cerca de 1840, la gente ha usado la fotografía (o ha elaborado dibujos) para confeccionar mapas o usarla como mapas. Normalmente se emplea la palabra
Arquitectura General de los Robots: Actuadores y Sensores. UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides
 Arquitectura General de los Robots: Actuadores y Sensores UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Arquitectura General Un robot está formado por: Sistema de control (sistema
Arquitectura General de los Robots: Actuadores y Sensores UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Arquitectura General Un robot está formado por: Sistema de control (sistema
Control de Motores Paso a Paso (Stepper motors)
") Control de Motores Paso a Paso (Stepper motors) Los motores paso a paso son ideales para la construcción de mecanismos en donde se requieren movimientos muy precisos. La característica principal de estos
Control de Motores Paso a Paso (Stepper motors) Los motores paso a paso son ideales para la construcción de mecanismos en donde se requieren movimientos muy precisos. La característica principal de estos
Introducción a la Automatización Industrial
 a la Automatización Industrial UPCO ICAI Departamento de Eletrónica y Automática 1 Qué es automatizar? PLANTA Agitador Conseguir que la PLANTA funcione de forma automática Reactivo ácido Reactivo alcalino
a la Automatización Industrial UPCO ICAI Departamento de Eletrónica y Automática 1 Qué es automatizar? PLANTA Agitador Conseguir que la PLANTA funcione de forma automática Reactivo ácido Reactivo alcalino
Campo Eléctrico. Fig. 1. Problema número 1.
 Campo Eléctrico 1. Cuatro cargas del mismo valor están dispuestas en los vértices de un cuadrado de lado L, tal como se indica en la figura 1. a) Hallar el módulo, dirección y sentido de la fuerza eléctrica
Campo Eléctrico 1. Cuatro cargas del mismo valor están dispuestas en los vértices de un cuadrado de lado L, tal como se indica en la figura 1. a) Hallar el módulo, dirección y sentido de la fuerza eléctrica
Evaluación del riesgo por posturas forzadas. Descripción de la metodología. Trastornos Musculoesqueléticos
 Evaluación del riesgo por posturas forzadas En el año 2001 se publicó la norma técnica europea EN 1005-4: Seguridad de las máquinas. Comportamiento físico del ser humano. Parte 4. Evaluación de las posturas
Evaluación del riesgo por posturas forzadas En el año 2001 se publicó la norma técnica europea EN 1005-4: Seguridad de las máquinas. Comportamiento físico del ser humano. Parte 4. Evaluación de las posturas
Un sistema de referencia se representa mediante unos EJES DE COORDENADAS (x,y), en cuyo origen estaría situado el observador.
, en cuyo origen estaría situado el observador.") UD6 FUERZAS Y MOVIMIENTO EL MOVIMIENTO DE LOS CUERPOS Un cuerpo está en movimiento si cambia de posición con respecto al sistema de referencia; en caso contrario, está en reposo. Sistema de referencia
UD6 FUERZAS Y MOVIMIENTO EL MOVIMIENTO DE LOS CUERPOS Un cuerpo está en movimiento si cambia de posición con respecto al sistema de referencia; en caso contrario, está en reposo. Sistema de referencia
Introducción. Condensadores
 . Introducción Un condensador es un dispositivo que sirve para almacenar carga y energía. Está constituido por dos conductores aislados uno de otro, que poseen cargas iguales y opuestas. Los condensadores
. Introducción Un condensador es un dispositivo que sirve para almacenar carga y energía. Está constituido por dos conductores aislados uno de otro, que poseen cargas iguales y opuestas. Los condensadores
ENERGIA. La energía se define como la capacidad que tiene un sistema para producir trabajo.
 ENERGIA La energía se define como la capacidad que tiene un sistema para producir trabajo. Tipos de energía almacenada: son aquellos que se encuentran dentro del sistema 1. Energía potencial: es debida
ENERGIA La energía se define como la capacidad que tiene un sistema para producir trabajo. Tipos de energía almacenada: son aquellos que se encuentran dentro del sistema 1. Energía potencial: es debida
EXPERIMENTO 8 MÁQUINAS SIMPLES
 EXPERIMENTO 8 MÁQUINAS SIMPLES 1. Objetivos 1.1 Estudiar sistemas en equilibrio estático traslacional y rotacional. 1.2 Calcular la ventaja mecánica para diferentes sistemas de poleas y palancas. 1.3 Adquirir
EXPERIMENTO 8 MÁQUINAS SIMPLES 1. Objetivos 1.1 Estudiar sistemas en equilibrio estático traslacional y rotacional. 1.2 Calcular la ventaja mecánica para diferentes sistemas de poleas y palancas. 1.3 Adquirir
11 Número de publicación: 1 058 948. 21 Número de solicitud: U 200401806. 51 Int. Cl. 7 : B63H 1/14. 72 Inventor/es: Robles Giménez, Ramón
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 1 08 948 21 Número de solicitud: U 01806 1 Int. Cl. 7 : B63H 1/14 12 SOLICITUD DE MODELO DE UTILIDAD U 22 Fecha de presentación:
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 1 08 948 21 Número de solicitud: U 01806 1 Int. Cl. 7 : B63H 1/14 12 SOLICITUD DE MODELO DE UTILIDAD U 22 Fecha de presentación:
CAPÍTULO IV RESULTADOS DE LA INVESTIGACIÓN. Para dar cumplimiento con el capítulo IV, los resultados de la
 CAPÍTULO IV RESULTADOS DE LA INVESTIGACIÓN Para dar cumplimiento con el capítulo IV, los resultados de la investigación, se consideraron una serie de fases, que ayudaran a describir el modelo matemático
CAPÍTULO IV RESULTADOS DE LA INVESTIGACIÓN Para dar cumplimiento con el capítulo IV, los resultados de la investigación, se consideraron una serie de fases, que ayudaran a describir el modelo matemático
BENEMÉRITA UNIVERSIDAD AUTONOMA DE PUEBLA FACULTAD DE CIENCIAS DE LA ELECTRÓNICA CONTROL DE PROCESOS POR COMPUTADORA PRACTICA II
 BENEMÉRITA UNIVERSIDAD AUTONOMA DE PUEBLA FACULTAD DE CIENCIAS DE LA ELECTRÓNICA CONTROL DE PROCESOS POR COMPUTADORA PRACTICA II POSICIONAMIENTO AUTOMATICO DE UN SERVOMOTOR mediante ARDUINO UNO usando
BENEMÉRITA UNIVERSIDAD AUTONOMA DE PUEBLA FACULTAD DE CIENCIAS DE LA ELECTRÓNICA CONTROL DE PROCESOS POR COMPUTADORA PRACTICA II POSICIONAMIENTO AUTOMATICO DE UN SERVOMOTOR mediante ARDUINO UNO usando
Fecha de realización:... Fecha de entrega:... Comisión:... Apellidos Nombres:...
 ASIGNATURA: FÍSICA I TRABAJO PRÁCTICO Nº 1: GRÁFICOS Y ESCALAS Fecha de realización:... Fecha de entrega:... Comisión:... Apellidos Nombres:... y......... 1. Objetivo del trabajo: Construcción de gráficos,
ASIGNATURA: FÍSICA I TRABAJO PRÁCTICO Nº 1: GRÁFICOS Y ESCALAS Fecha de realización:... Fecha de entrega:... Comisión:... Apellidos Nombres:... y......... 1. Objetivo del trabajo: Construcción de gráficos,
Universidad Alonso de Ojeda. Facultad de Ingeniería GUIA DE ESTUDIO ALGEBRA LINEAL.
 UNIDAD IV: VECTORES EN R2 Y R3 VECTOR Se puede considerar un vector como un segmento de recta con una flecha en uno de sus extremos. De esta forma lo podemos distinguir por cuatro partes fundamentales:
UNIDAD IV: VECTORES EN R2 Y R3 VECTOR Se puede considerar un vector como un segmento de recta con una flecha en uno de sus extremos. De esta forma lo podemos distinguir por cuatro partes fundamentales:
CURSO: MECÁNICA DE SÓLIDOS II UNIVERSIDAD NACIONAL DEL CALLAO FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
 UNIVERSIDAD NACIONAL DEL CALLAO FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA ESCUELA PROFESIONAL DE INGENIERÍA ELÉCTRICA CURSO: MECÁNICA DE SÓLIDOS II PROFESOR: ING. JORGE A. MONTAÑO PISFIL CURSO DE
UNIVERSIDAD NACIONAL DEL CALLAO FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA ESCUELA PROFESIONAL DE INGENIERÍA ELÉCTRICA CURSO: MECÁNICA DE SÓLIDOS II PROFESOR: ING. JORGE A. MONTAÑO PISFIL CURSO DE
Topología de red: Topología en Malla
 Topología de red: Topología en Malla En una topología en malla, cada dispositivo tiene un enlace punto a punto y dedicado con cualquier otro dispositivo. El término dedicado significa que el enlace conduce
Topología de red: Topología en Malla En una topología en malla, cada dispositivo tiene un enlace punto a punto y dedicado con cualquier otro dispositivo. El término dedicado significa que el enlace conduce
Oferta tecnológica: Desensamblado automático de componentes para desmantelamiento y reciclado de sistemas
 Oferta tecnológica: Desensamblado automático de componentes para desmantelamiento y reciclado de sistemas Oferta tecnológica Desensamblado automático de componentes para desmantelamiento y reciclado de
Oferta tecnológica: Desensamblado automático de componentes para desmantelamiento y reciclado de sistemas Oferta tecnológica Desensamblado automático de componentes para desmantelamiento y reciclado de
Robótica Industrial. ISA.- Ingeniería de Sistemas y Automática TEMA 2: MORFOLOGIA DEL ROBOT. ACTADORES Y SENSORES
 TEMA 2: MORFOLOGIA DEL ROBOT. ACTADORES Y SENSORES Robótica Industrial ISA.- Morfología del Robot 1. Estructura mecánica 2. Transmisiones y reductores 3. Actuadores 4. Sensores internos 5. Elementos terminales
TEMA 2: MORFOLOGIA DEL ROBOT. ACTADORES Y SENSORES Robótica Industrial ISA.- Morfología del Robot 1. Estructura mecánica 2. Transmisiones y reductores 3. Actuadores 4. Sensores internos 5. Elementos terminales
GUIA DE ESTUDIO TEMA: DINAMICA
 GUIA DE ESTUDIO TEMA: DINAMICA A. PREGUNTAS DE TIPO FALSO O VERDADERO A continuación se presentan una serie de proposiciones que pueden ser verdaderas o falsas. En el paréntesis de la izquierda escriba
GUIA DE ESTUDIO TEMA: DINAMICA A. PREGUNTAS DE TIPO FALSO O VERDADERO A continuación se presentan una serie de proposiciones que pueden ser verdaderas o falsas. En el paréntesis de la izquierda escriba
Dirección General de Educación Superior Tecnológica
 Dirección General de Educación Superior Tecnológica 1. Datos Generales de la asignatura Nombre de la asignatura: Robótica Clave de la asignatura: MAF-1303 Créditos (Ht-Hp - créditos): Carrera: 3-2-5 Ingeniería
Dirección General de Educación Superior Tecnológica 1. Datos Generales de la asignatura Nombre de la asignatura: Robótica Clave de la asignatura: MAF-1303 Créditos (Ht-Hp - créditos): Carrera: 3-2-5 Ingeniería
CONTENIDO. 1. Definición. 6. Ejemplos. 6.1 Medición de distancia y velocidad. 2. Aplicaciones. 3. Clasificación
 Encoders Rotativos CONTENIDO 1. Definición 2. Aplicaciones 6. Ejemplos 6.1 Medición de distancia y velocidad 3. Clasificación 4. Principios de operación 4.1 Encoder Incremental Principio de funcionamiento
Encoders Rotativos CONTENIDO 1. Definición 2. Aplicaciones 6. Ejemplos 6.1 Medición de distancia y velocidad 3. Clasificación 4. Principios de operación 4.1 Encoder Incremental Principio de funcionamiento
AUTOR: Diego Alonso. Una red de tuberías principales que llevan el agua hasta los hidrantes, que son las tomas de agua en la parcela.
 TÍTULO: El riego por aspersión AUTOR: Diego Alonso QUÉ ES? Es un sistema de riego en el que el agua se aplica en forma de una lluvia más o menos intensa y uniforme sobre la parcela con el objetivo de se
TÍTULO: El riego por aspersión AUTOR: Diego Alonso QUÉ ES? Es un sistema de riego en el que el agua se aplica en forma de una lluvia más o menos intensa y uniforme sobre la parcela con el objetivo de se
Comunicación de Datos
 2.3.1 Microondas terrestres. La antena más común en las microondas es la de tipo parabólico. El tamaño típico es de un diámetro de unos 3 metros. Esta antena se fija rígidamente, y en este caso el haz
2.3.1 Microondas terrestres. La antena más común en las microondas es la de tipo parabólico. El tamaño típico es de un diámetro de unos 3 metros. Esta antena se fija rígidamente, y en este caso el haz
Método Monge: Proyecciones Ortogonales Concertadas
 Proyecciones ortogonales concertadas o Método Monge 7 Método Monge: Proyecciones Ortogonales Concertadas Conceptos Generales D.I. Patricia Muñoz Cátedra Morfología Carrera de Diseño Industrial FADU - UBA
Proyecciones ortogonales concertadas o Método Monge 7 Método Monge: Proyecciones Ortogonales Concertadas Conceptos Generales D.I. Patricia Muñoz Cátedra Morfología Carrera de Diseño Industrial FADU - UBA
Capítulo 1 Introducción a los accionamientos de máquinas
 Capítulo 1 Introducción a los accionamientos de máquinas DISEÑO II Profesor: Libardo Vanegas Useche FACULTAD DE INGENIERÍA MECÁNICA UNIVERSIDAD TECNOLÓGICA DE PEREIRA 8 d e s ep t i e m b re d e 2 0 1
Capítulo 1 Introducción a los accionamientos de máquinas DISEÑO II Profesor: Libardo Vanegas Useche FACULTAD DE INGENIERÍA MECÁNICA UNIVERSIDAD TECNOLÓGICA DE PEREIRA 8 d e s ep t i e m b re d e 2 0 1
Tema 2. Conceptos topográficos
 Tema 2. Conceptos topográficos Se puede definir la Topografía como el conjunto de métodos e instrumentos necesarios para representar gráfica o numéricamente el terreno con todos sus detalles, naturales
Tema 2. Conceptos topográficos Se puede definir la Topografía como el conjunto de métodos e instrumentos necesarios para representar gráfica o numéricamente el terreno con todos sus detalles, naturales
Expresiones de velocidad y aceleración en distintas coordenadas
 Apéndice B Expresiones de velocidad y aceleración en distintas coordenadas Índice B.1. Coordenadas cartesianas............... B.1 B.2. Coordenadas cilíndricas y polares......... B.2 B.3. Coordenadas esféricas................
Apéndice B Expresiones de velocidad y aceleración en distintas coordenadas Índice B.1. Coordenadas cartesianas............... B.1 B.2. Coordenadas cilíndricas y polares......... B.2 B.3. Coordenadas esféricas................
MEDIDAS DE LONGITUD. Objetivos:
 MEDIDAS DE LONGITUD Objetivos: 1) Obtener el volumen de una pieza cilíndrica, utilizando el CALIBRE y el MICRÓMETRO. 2) Obtener el radio de una esfera con el ESFERÓMETRO. Material: Calibre, micrómetro,
MEDIDAS DE LONGITUD Objetivos: 1) Obtener el volumen de una pieza cilíndrica, utilizando el CALIBRE y el MICRÓMETRO. 2) Obtener el radio de una esfera con el ESFERÓMETRO. Material: Calibre, micrómetro,
Aplicaciones de las integrales dobles
 Aplicaciones de las integrales dobles Las integrales dobles tienen multiples aplicaciones en física en geometría. A continuación damos una relación de alguna de ellas.. El área de una región plana R en
Aplicaciones de las integrales dobles Las integrales dobles tienen multiples aplicaciones en física en geometría. A continuación damos una relación de alguna de ellas.. El área de una región plana R en
PROCEDIMIENTO TÉCNICO DEL COMITÉ DE OPERACIÓN ECONÓMICA DEL SINAC CALCULO DE LOS COSTOS MARGINALES DE ENERGIA DE CORTO PLAZO
 COES SINAC PROCEDIMIENTO TÉCNICO DEL COMITÉ DE OPERACIÓN ECONÓMICA DEL SINAC PR 07 CALCULO DE LOS COSTOS MARGINALES DE ENERGIA DE CORTO PLAZO Aprobado en S.D. N 18 del 18 de octubre de 1995. Modificación
COES SINAC PROCEDIMIENTO TÉCNICO DEL COMITÉ DE OPERACIÓN ECONÓMICA DEL SINAC PR 07 CALCULO DE LOS COSTOS MARGINALES DE ENERGIA DE CORTO PLAZO Aprobado en S.D. N 18 del 18 de octubre de 1995. Modificación
Clasificación de los planes:
 Tipos de Planes Plan Es el producto de la planeación, el evento intermedio entre el proceso de planeación y el proceso de implementación del mismo. El propósito de los planes se encuentra en: La previsión,
Tipos de Planes Plan Es el producto de la planeación, el evento intermedio entre el proceso de planeación y el proceso de implementación del mismo. El propósito de los planes se encuentra en: La previsión,
11. ANÁLISIS CINEMÁTICO POR MÉTODOS
 11. NÁLISIS CINEMÁTICO POR MÉTOOS NUMÉRICOS 11.1. Introducción En los capítulos anteriores se han estudiado los métodos tradicionales para el estudio cinemático y dinámico de mecanismos, basados en la
11. NÁLISIS CINEMÁTICO POR MÉTOOS NUMÉRICOS 11.1. Introducción En los capítulos anteriores se han estudiado los métodos tradicionales para el estudio cinemático y dinámico de mecanismos, basados en la
Conceptos básicos: par, potencia
 Conceptos básicos: par, potencia Qué es la potencia? Freno dinamométrico fuerza de impulsión de tracción Fuerza Medida de la fuerza Doc. Fiatagri Trabajo: fuerza aplicada por distancia (en la dirección
Conceptos básicos: par, potencia Qué es la potencia? Freno dinamométrico fuerza de impulsión de tracción Fuerza Medida de la fuerza Doc. Fiatagri Trabajo: fuerza aplicada por distancia (en la dirección
3. LA COMBINACION DE FACTORES Y LA PRODUCTIVIDAD DE LA EMPRESA
 3. LA COMBINACION DE FACTORES Y LA PRODUCTIVIDAD DE LA EMPRESA Como se sabe, la producción es el proceso mediante el cual se generan los bienes y servicios que las sociedades compran con el fin de consumirlos
3. LA COMBINACION DE FACTORES Y LA PRODUCTIVIDAD DE LA EMPRESA Como se sabe, la producción es el proceso mediante el cual se generan los bienes y servicios que las sociedades compran con el fin de consumirlos
INSTITUTO TECNOLÓGICO DE VERACRUZ RESUMEN DE LA UNIDAD II: PROGRAMACION DE ROBOTS
 INSTITUTO TECNOLÓGICO DE VERACRUZ CARRERA: INGENIERIA MECATRÓNICA CATEDRATICO: DR. JOSÉ ANTONIO GARRIDO NATARÉN RESUMEN DE LA UNIDAD II: PROGRAMACION DE ROBOTS MATERIA: ROBOTICA GRUPO: 9F1B EQUIPO 1 CURIE
INSTITUTO TECNOLÓGICO DE VERACRUZ CARRERA: INGENIERIA MECATRÓNICA CATEDRATICO: DR. JOSÉ ANTONIO GARRIDO NATARÉN RESUMEN DE LA UNIDAD II: PROGRAMACION DE ROBOTS MATERIA: ROBOTICA GRUPO: 9F1B EQUIPO 1 CURIE
Qué es una computadora?
 Qué es una computadora? La computadora es una máquina de tipo electrónico-digital, capaz de procesar información a gran velocidad y con gran precisión, previa programación correcta del ser humano. Qué
Qué es una computadora? La computadora es una máquina de tipo electrónico-digital, capaz de procesar información a gran velocidad y con gran precisión, previa programación correcta del ser humano. Qué
Z 1 = 8 Z 2 = 16 W 1 Z 1 = W 2 Z 2
 7- SISTEMAS DE ENGRANAJES Para que dos ruedas dentadas engranen entre sí, el tamaño de los dientes de cada una deben ser iguales. Z 1 = 8 Z 2 = 16 El número de dientes de un engranaje se representa por
7- SISTEMAS DE ENGRANAJES Para que dos ruedas dentadas engranen entre sí, el tamaño de los dientes de cada una deben ser iguales. Z 1 = 8 Z 2 = 16 El número de dientes de un engranaje se representa por
MAQUINAS HIDRAULICAS TURBINA HIDRAULICA DE IMPULSO, TURBINA PELTON PRESENTA ING. JOSE LUIS MORALES REYES
 INSTITUTO TECNOLÓGICO SUPERIOR DE LOS REYES ESCUELA DE INGENIERÍA A ELECTROMECÁNICA MAQUINAS HIDRAULICAS TURBINA HIDRAULICA DE IMPULSO, TURBINA PELTON PRESENTA ING. JOSE LUIS MORALES REYES INDICE OBJETIVO
INSTITUTO TECNOLÓGICO SUPERIOR DE LOS REYES ESCUELA DE INGENIERÍA A ELECTROMECÁNICA MAQUINAS HIDRAULICAS TURBINA HIDRAULICA DE IMPULSO, TURBINA PELTON PRESENTA ING. JOSE LUIS MORALES REYES INDICE OBJETIVO
2. CURVAS PLANAS, ECUACIONES PARAMÉTRICAS Y COORDENADAS POLARES
 2. CURVAS PLANAS, ECUACIONES PARAMÉTRICAS Y COORDENADAS POLARES INDICE 2.1. Curvas planas y ecuaciones paramétricas...2 2.2. Ecuaciones paramétricas de algunas curvas y su representación grafica 3 2.3.
2. CURVAS PLANAS, ECUACIONES PARAMÉTRICAS Y COORDENADAS POLARES INDICE 2.1. Curvas planas y ecuaciones paramétricas...2 2.2. Ecuaciones paramétricas de algunas curvas y su representación grafica 3 2.3.
Escuela Universitaria de Ingeniería Técnica Aeronáutica Expresión Gráfica en la Ingeniería INGENIERÍA GRÁFICA
 Escuela Universitaria de Ingeniería Técnica Aeronáutica Expresión Gráfica en la Ingeniería INGENIERÍA GRÁFICA 4. DISEÑO TÉCNICO. 4.1 Diseño mecánico. 4.1.1 Definición y representación de Ejes y Árboles.
Escuela Universitaria de Ingeniería Técnica Aeronáutica Expresión Gráfica en la Ingeniería INGENIERÍA GRÁFICA 4. DISEÑO TÉCNICO. 4.1 Diseño mecánico. 4.1.1 Definición y representación de Ejes y Árboles.
Modelo Cliente / Servidor. Gerardo Grinman 5D
 Modelo Cliente / Servidor Gerardo Grinman 5D Introducción En el mundo de TCP/IP las comunicaciones entre computadoras se rigen básicamente por lo que se llama modelo Cliente-Servidor. Éste es un modelo
Modelo Cliente / Servidor Gerardo Grinman 5D Introducción En el mundo de TCP/IP las comunicaciones entre computadoras se rigen básicamente por lo que se llama modelo Cliente-Servidor. Éste es un modelo
COJINETES. Ing. Gerardo Márquez, MSc
 Universidad del Táchira Departamento de Ingeniería Mecánica Núcleo de Diseño Mecánico Dibujo de Elementos de Máquina COJINETES Ing. Gerardo Márquez, MSc COJINETES La función de un cojinete es soportar
Universidad del Táchira Departamento de Ingeniería Mecánica Núcleo de Diseño Mecánico Dibujo de Elementos de Máquina COJINETES Ing. Gerardo Márquez, MSc COJINETES La función de un cojinete es soportar
Muelles y resortes. Índice. Tema 8º: Tema DI8 - Muelles y resortes. Ingeniería Gráfica y Topografía. Expresión Gráfica y DAO 1
 Tema 8º: Muelles y resortes Ingeniería Gráfica y Topografía M.D.M.G./11 Índice - Generalidades. - Clasificación. - Resortes helicoidales de compresión. - Resortes helicoidales de tracción. - Resortes cónicos
Tema 8º: Muelles y resortes Ingeniería Gráfica y Topografía M.D.M.G./11 Índice - Generalidades. - Clasificación. - Resortes helicoidales de compresión. - Resortes helicoidales de tracción. - Resortes cónicos
Cada acople esta diseñado para un tipo de movimiento y esta dado para una determinada potencia y tipo de desalineamiento. Se especifican por:
 ACOPLES y JUNTAS (Junta Cardánica) Acople: Dispositivo ó elemento para unir dos ejes en sus extremos, con el objeto de transmitir (potencia ó velocidad). Cuando ocurre una desalineación, las piezas del
ACOPLES y JUNTAS (Junta Cardánica) Acople: Dispositivo ó elemento para unir dos ejes en sus extremos, con el objeto de transmitir (potencia ó velocidad). Cuando ocurre una desalineación, las piezas del
UNIVERSIDAD LOS ANGELES DE CHIMBOTE
 UNIVERSIDAD LOS ANGELES DE CHIMBOTE PROFESOR: EDWAR HERRERA FARFAN ALUMNO: MARTIN GUEVARA GRANDA 1.- UNIDAD II: I. CINEMATICA II. Objetivos y Conceptos III. Elementos IV. Leyes M.R.U V. Tipos de Movimiento
UNIVERSIDAD LOS ANGELES DE CHIMBOTE PROFESOR: EDWAR HERRERA FARFAN ALUMNO: MARTIN GUEVARA GRANDA 1.- UNIDAD II: I. CINEMATICA II. Objetivos y Conceptos III. Elementos IV. Leyes M.R.U V. Tipos de Movimiento
I. DATOS DE IDENTIFICACIÓN. 2. Programa (s) de estudio: (Técnico, Licenciatura (s) Licenciatura, Ingeniería Industrial 3. Vigencia del plan: 2007-1
 de estudio: (Técnico, Licenciatura (s) Licenciatura, Ingeniería Industrial 3. Vigencia del plan: 2007-1") UNIVERSIDAD AUTÓNOMA DE BAJA CALIFORNIA COORDINACIÓN DE FORMACIÓN BÁSICA COORDINACIÓN DE FORMACIÓN PROFESIONAL Y VINCULACIÓN UNIVERSITARIA PROGRAMA DE UNIDAD DE APRENDIZAJE POR COMPETENCIAS I. DATOS DE
UNIVERSIDAD AUTÓNOMA DE BAJA CALIFORNIA COORDINACIÓN DE FORMACIÓN BÁSICA COORDINACIÓN DE FORMACIÓN PROFESIONAL Y VINCULACIÓN UNIVERSITARIA PROGRAMA DE UNIDAD DE APRENDIZAJE POR COMPETENCIAS I. DATOS DE
Gráficas: ( Parte I ) Dra. Noemí L. Ruiz Limardo 2008 Derechos de Autor Reservados
 Dra. Noemí L. Ruiz Limardo 2008 Derechos de Autor Reservados") Gráficas: ( Parte I ) Dra. Noemí L. Ruiz Limardo 2008 Derechos de Autor Reservados Gráficas Definición de Gráfica Una gráfica es una representación pictórica o visual de un conjunto de datos. Puede ilustrar
Gráficas: ( Parte I ) Dra. Noemí L. Ruiz Limardo 2008 Derechos de Autor Reservados Gráficas Definición de Gráfica Una gráfica es una representación pictórica o visual de un conjunto de datos. Puede ilustrar
PRÁCTICA No. 5 Estados del flujo en un canal
 PRÁCTICA No. 5 Estados del flujo en un canal Laboratorio de Hidráulica I OBJETIVO: Observar la generación y el comportamiento de diversos estados del flujo en un canal. INTRODUCCIÓN Para poder comprender
PRÁCTICA No. 5 Estados del flujo en un canal Laboratorio de Hidráulica I OBJETIVO: Observar la generación y el comportamiento de diversos estados del flujo en un canal. INTRODUCCIÓN Para poder comprender
DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE CAPNOGRAFO PORTATIL
 DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE CAPNOGRAFO P08 DISEÑO Y ELABORACIÓN DEL SOFTWARE EMBEBIDO PARA EL MANEJO DE LA PANTALLA LCD Y EL CONTROL DE MANDOS Actividades A08-1 Diseño de la programación para
DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE CAPNOGRAFO P08 DISEÑO Y ELABORACIÓN DEL SOFTWARE EMBEBIDO PARA EL MANEJO DE LA PANTALLA LCD Y EL CONTROL DE MANDOS Actividades A08-1 Diseño de la programación para
UNIVERSIDAD POLITÉCNICA DE EL SALVADOR FACULTAD DE INGENIERÍA Y ARQUITECTURA ESCUELA DE INGENIERÍA ELÉCTRICA Educación Basada en Competencias
 UNIVERSIDAD POLITÉCNICA DE EL SALVADOR FACULTAD DE INGENIERÍA Y ARQUITECTURA ESCUELA DE INGENIERÍA ELÉCTRICA Educación Basada en Competencias Laboratorio No. 2 ARRANQUE DE UN MOTOR TRIFÁSICO Y ENCENDIDO
UNIVERSIDAD POLITÉCNICA DE EL SALVADOR FACULTAD DE INGENIERÍA Y ARQUITECTURA ESCUELA DE INGENIERÍA ELÉCTRICA Educación Basada en Competencias Laboratorio No. 2 ARRANQUE DE UN MOTOR TRIFÁSICO Y ENCENDIDO
Clasificacion de robots
 Clasificacion de robots Robot Industrial Robotica Industrial El campo de la robótica industrial puede definirse como el estudio, diseño y uso de robots para la ejecución de procesos industriales. Más formalmente,
Clasificacion de robots Robot Industrial Robotica Industrial El campo de la robótica industrial puede definirse como el estudio, diseño y uso de robots para la ejecución de procesos industriales. Más formalmente,
CAPITULO III. Implementación Del Sistema Mecánico
 CAPITULO III Implementación Del Sistema Mecánico El sistema mecánico es el que se encarga de dar movimiento y dirección al móvil, dentro de esta parte se encuentran los motores, engranes, mecanismos y
CAPITULO III Implementación Del Sistema Mecánico El sistema mecánico es el que se encarga de dar movimiento y dirección al móvil, dentro de esta parte se encuentran los motores, engranes, mecanismos y
UNIVERSIDAD TECNOLOGICA DE PEREIRA PROGRAMA DE TECNOLOGIA ELECTRICA
 UNIVERIDAD TECNOLOGICA DE PEREIRA PROGRAMA DE TECNOLOGIA ELECTRICA Curso Básico de Análisis de istemas Eléctricos de Potencia Antonio Escobar Zuluaga Pereira - Risaralda - Colombia Febrero - 2011 2 ELEMENTO
UNIVERIDAD TECNOLOGICA DE PEREIRA PROGRAMA DE TECNOLOGIA ELECTRICA Curso Básico de Análisis de istemas Eléctricos de Potencia Antonio Escobar Zuluaga Pereira - Risaralda - Colombia Febrero - 2011 2 ELEMENTO
Coordenadas polares. Representación de puntos con coordenadas polares. Por ejemplo
 Instituto de Matemática Cálculo Integral Profesora Elisabeth Ramos Coordenadas polares El sistema de coordenadas polares es un sistema de coordenadas bidimensional en el cual cada punto o posición del
Instituto de Matemática Cálculo Integral Profesora Elisabeth Ramos Coordenadas polares El sistema de coordenadas polares es un sistema de coordenadas bidimensional en el cual cada punto o posición del
Algoritmos y Diagramas de flujo
 Algoritmos y Diagramas de flujo En los pasos a seguir para el desarrollo de un problema, existen básicamente dos tipos de elementos con los cuales es posible especificar un problema en forma esquemática
Algoritmos y Diagramas de flujo En los pasos a seguir para el desarrollo de un problema, existen básicamente dos tipos de elementos con los cuales es posible especificar un problema en forma esquemática
Cinemática en 2D: Movimiento Circular.
 Cinemática en 2D: Movimiento Circular. Movimiento circular uniforme Otro caso particular de movimiento en dos dimensiones es el de una partícula que se mueve describiendo una trayectoria circular, con
Cinemática en 2D: Movimiento Circular. Movimiento circular uniforme Otro caso particular de movimiento en dos dimensiones es el de una partícula que se mueve describiendo una trayectoria circular, con
3º ESO TECNOLOGIAS MECANISMOS
 3º ESO TECNOLOGIAS MECANISMOS TEORIA DE MECANISMOS SIMPLES CON PALANCAS... 1 EJERCICIOS DE PALANCAS...3 TEORIA DE MECANISMOS DE TRANSMISIÓN LINEAL...6 TEORIA DE MECANISMOS DE TRANSMISIÓN CIRCULAR...6 TEORIA
3º ESO TECNOLOGIAS MECANISMOS TEORIA DE MECANISMOS SIMPLES CON PALANCAS... 1 EJERCICIOS DE PALANCAS...3 TEORIA DE MECANISMOS DE TRANSMISIÓN LINEAL...6 TEORIA DE MECANISMOS DE TRANSMISIÓN CIRCULAR...6 TEORIA
Un mecanismo nos ayuda a realizar un trabajo, modificando la forma o entidad de la fuerza que realizamos.
 Los seres humanos buscamos siempre la forma de facilitar nuestro trabajo y para ayudarnos desarrollamos la tecnología, la cual no siempre es electrónica o eléctrica, hay muchos elementos mecánicos que
Los seres humanos buscamos siempre la forma de facilitar nuestro trabajo y para ayudarnos desarrollamos la tecnología, la cual no siempre es electrónica o eléctrica, hay muchos elementos mecánicos que
2. ANATOMÍA HUMANA 2.1. GEOMETRÍA
 2. ANATOMÍA HUMANA Durante la marcha, el cuerpo humano se rige mediante movimientos no lineales, además el movimiento de los tejidos blandos puede ser despreciable frente a la dinámica global del movimiento.
2. ANATOMÍA HUMANA Durante la marcha, el cuerpo humano se rige mediante movimientos no lineales, además el movimiento de los tejidos blandos puede ser despreciable frente a la dinámica global del movimiento.
Factores de riesgo del levantamiento de cargas
 Factores de riesgo del levantamiento de cargas Los factores de riesgo son aquellas condiciones de trabajo o exigencias durante la realización de manipulación manual de cargas que incrementan la probabilidad
Factores de riesgo del levantamiento de cargas Los factores de riesgo son aquellas condiciones de trabajo o exigencias durante la realización de manipulación manual de cargas que incrementan la probabilidad