Introducción. TEMA 2. MORFOLOGÍA
|
|
|
- Gonzalo Jiménez Benítez
- hace 8 años
- Vistas:
Transcripción
1 2.1 Introducción TEMA 2. MORFOLOGÍA Introducción. Estructura mecánica. Estructura cinemática. Tipos de articulaciones. Configuraciones cinemáticas. Precisión de movimientos. 1

2 Introducción La configuración de la estructura mecánica de los robots industriales no busca una réplica humana sino funcional. Los robots manipuladores son, esencialmente, brazos articulados. Brazo humano Huesos Músculos Tendones Nervios Brazo robótico Eslabones Accionadores Transmisiones Cables de señal 2

3 Muñeca Ubicada en el extremo del robot, está la muñeca que permite orientar en el espacio de trabajo el elemento terminal (pinza, pistola de soldar, ventosas, herramientas, etc...) 3

4 2.2 Estructura mecánica TEMA 2. MORFOLOGÍA Introducción. Estructura mecánica. Estructura cinemática. Tipos de articulaciones. Configuraciones cinemáticas. Precisión de movimientos. 4

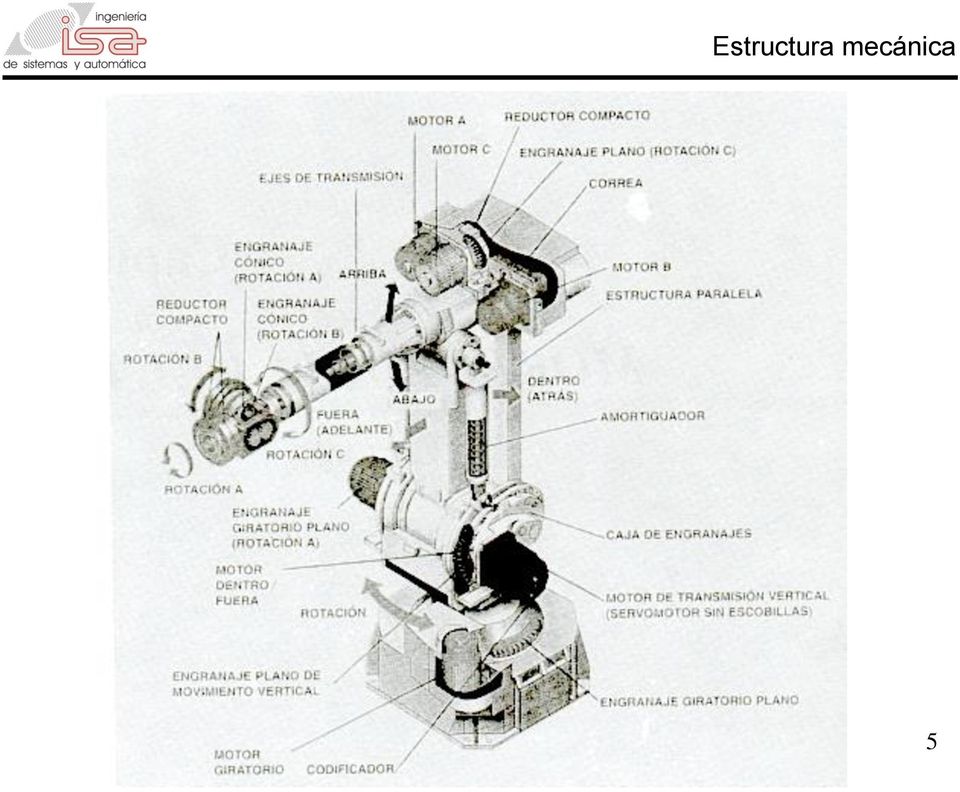
5 Estructura mecánica 5
6 2.3 Estructura cinemática TEMA 2. MORFOLOGÍA Introducción. Estructura mecánica. Estructura cinemática. Tipos de articulaciones. Configuraciones cinemáticas. Precisión de movimientos. 6

7 Estructura cinemática Un manipulador industrial convencional es una cadena cinemática abierta formada por un conjunto de eslabones o elementos de la cadena interrelacionados mediante articulaciones o pares cinemáticos. 7

8 Grado de libertad Cada uno de los movimientos independientes que puede realizar una articulación con respecto a la anterior se denomina grado de libertad 8

9 Muñeca 9
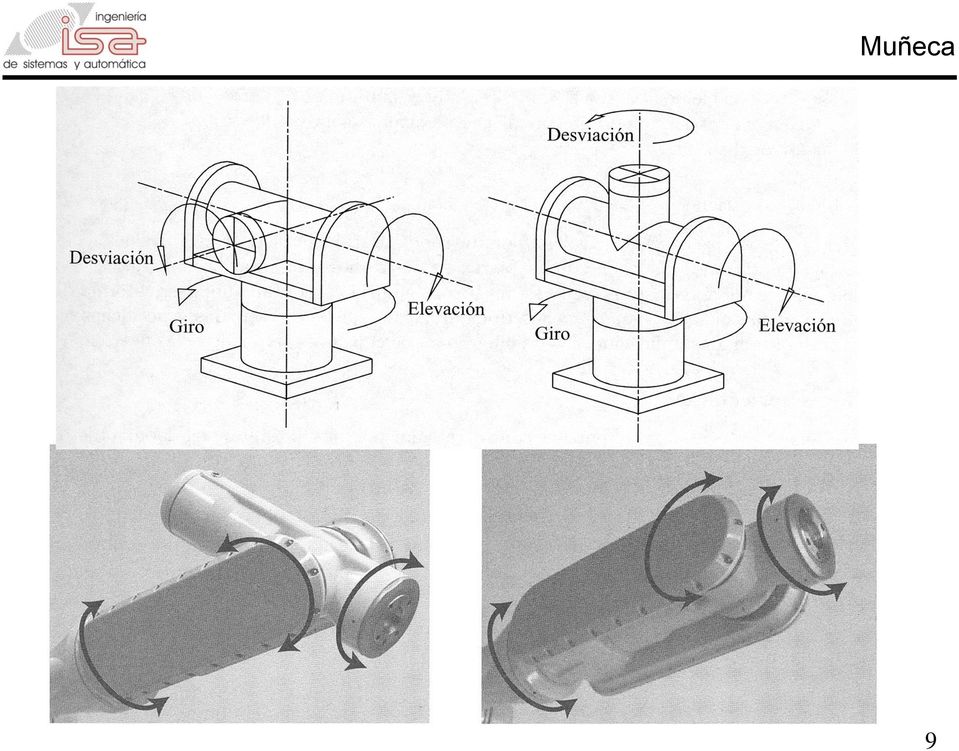
10 Características de la muñeca Tamaño reducido Modelado matemático sencillo (p.ej. ejes que se corten) Potencia adecuada a la tarea a realizar Conexión del elemento terminal cercano a los ejes para maximizar la precisión 10

11 Robot redundante (1) a) 3 grados de libertad más los de la muñeca. b) Robot redundante, 4 grados de libertad para evitar obsáculos 11

12 Robot redundante (2) Robot redundante para aumentar su espacio de trabajo 12

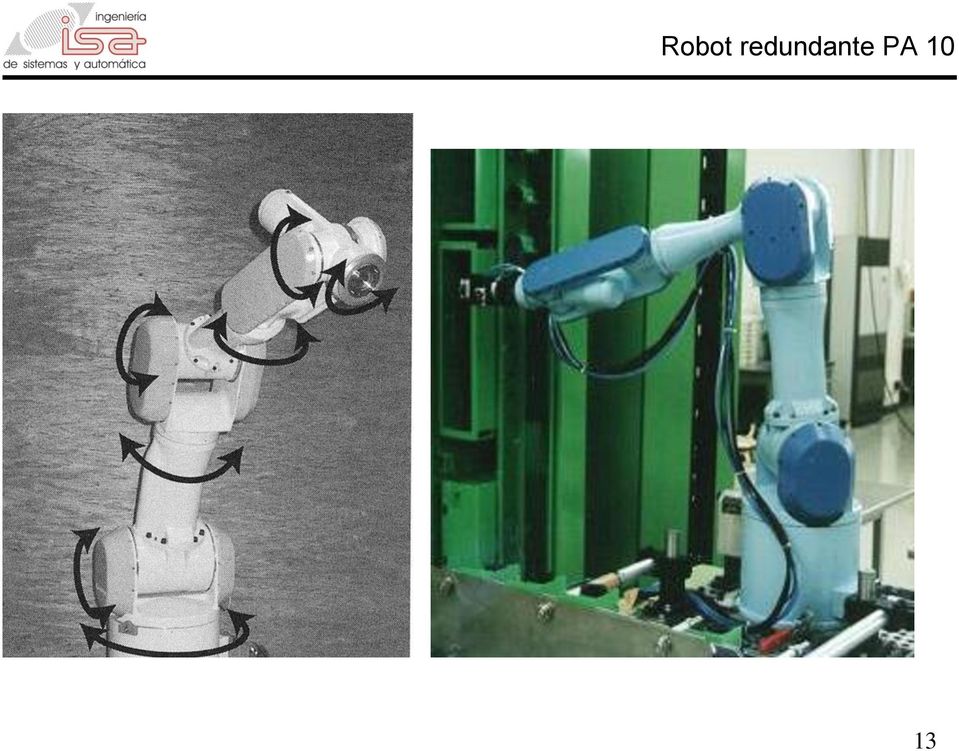
13 Robot redundante PA 10 13
14 2.4 Tipos de articulaciones TEMA 2. MORFOLOGÍA Introducción. Estructura mecánica. Estructura cinemática. Tipos de articulaciones. Configuraciones cinemáticas. Precisión de movimientos. 14

15 Articulaciones Las uniones son elementos rígidos que se emplean para la conexión de las diversas articulaciones del robot. En una cadena de unión-articulación-unión, se le denomina unión de entrada al eslabón que esta más cerca de la base del robot, a la otra unión por consiguiente se le llama unión de salida. La unión de salida es la que se desplaza con respecto a la unión de entrada. El movimiento de las uniones puede ser lineal o rotacional. Las articulaciones lineales implican un movimiento deslizante o de translación de las uniones de conexión, este movimiento puede ser generado por pistones o por medio de hacer deslizar el elemento sobre un carril o guía usando dispositivos mecánicos, eléctricos o neumáticos. 15

16 Articulaciones Primática 1 GDL Rotación 1GDL Cilíndrica 2 GDL Planar 2 GDL Universal 2 GDL Esférica 3 GDL 16

17 Articulaciones rotacionales Se pueden distinguir tres tipos: Articulación Rotacional, el eje de rotación es perpendicular a los ejes de las dos uniones. Articulación de Torsión, la cual realiza un movimiento de torsión entre las uniones de entrada y salida, y el eje de torsión de esta articulación es paralelo al eje de las dos uniones. Articulación de Revolución, en este tipo el eje de rotación es paralelo al eje de la unión de entrada y perpendicular al de la unión de salida, es decir la unión de salida gira alrededor de la de entrada. Unión Unión entrada entrada Unión entrada Unión entrada Unión salida Unión salida Unión salida 17

18 2.5 Configuraciones cinemáticas TEMA 2. MORFOLOGÍA Introducción. Estructura mecánica. Estructura cinemática. Tipos de articulaciones. Configuraciones cinemáticas. Precisión de movimientos. 18

19 Configuraciones cinemáticas Robot cartesiano Robot cilíndrico Robot esférico o polar Robot SCARA Robot angular o antropomórfico 19

20 Espacio de trabajo El espacio o volumen de trabajo, está formado por todas las posiciones del espacio potencialmente accesibles por el extremo de su muñeca. Kuka KR 30 20


21 Espacio de trabajo PA 10 21
22 Accesibilidad 22
23 Robot cartesiano V = L 3 Buena precisión Velocidad cte en todo el espacio de trabajo Robot cartesiano E2XM3 Está formado por tres articulaciones de tipo prismático con ejes ortogonales entre sí. El robot cartesiano y el robot cilíndrico presentan volúmenes de trabajo regulares. El robot cartesiano genera una figura cúbica. 23
24 Robot cilíndrico V = 3 L 3 Robot cilíndrico RT33 Una articulación rotacional y dos prismáticas. La primera con eje paralelo a la segunda. El robot de configuración cilíndrica presenta un volumen de trabajo parecido a un cilindro (normalmente este robot no tiene una rotación de 360 ) 24
25 Robot esférico o polar V = (28/3) L 3 Robot esférico Fanuc L1000 Dos articulaciones rotacionales ortogonales entre sí y una prismática con eje ortogonal a las dos primeras. Los robots que poseen una configuración polar, los de brazo articulado y los modelos SCARA presentan un volumen de trabajo irregular. 25
26 Robot SCARA Robot SCARA, V = 4 L 3 Alta precisión Velocidad Dos articulaciones rotacionales y una prismática con ejes paralelos. 26
27 Robot angular o antropomórfico V = (32/3) L 3 Facilidad para trayectorias complejas Alta maniobrabilidad Accesibilidad a zonas con obstáculos Robot angular KR 500 Tres articulaciones rotacionales. Las dos últimas de ejes paralelos. 27
28 Robot paralelo Robot paralelo IRB GDL La posición y orientación del efector final es controlada por medio del desplazamiento de seis articulaciones prismáticas conectadas a la base del robot por medio de una junta universal, y al efector final por medio de otra articulación esférica. 28
29 2.6 Precisión de movimientos TEMA 2. MORFOLOGÍA Introducción. Estructura mecánica. Estructura cinemática. Tipos de articulaciones. Configuraciones cinemáticas. Precisión de movimientos. 29
30 Resolución espacial La precisión de movimientos en un robot industrial depende de tres factores: la resolución espacial, la exactitud y la repetibilidad. La resolución espacial se define como el incremento más pequeño de movimiento que puede ejecutar un robot. La resolución espacial depende directamente del control del sistema y de las inexactitudes mecánicas del robot. 30
31 Resolución espacial La resolución espacial depende del control del sistema porque éste, precisamente, es el medio para controlar todos los incrementos individuales de una articulación. Su valor está limitado por la resolución de los captadores de posición y convertidores A/D y D/A, por el número de bits con los que se realizan las operaciones aritméticas en la CPU y por los elementos motrices, si son discretos. La resolución espacial también depende de las inexactitudes mecánicas que se encuentran estrechamente relacionadas con la calidad de los componentes que conforman las uniones y las articulaciones. Como ejemplos de inexactitudes mecánicas pueden citarse la holgura de los engranes, las tensiones en las poleas, las fugas de fluidos, etc. Para explicar con mayor precisión el término resolución espacial tomemos el siguiente ejemplo: En el dibujo anterior supongamos que utilizando el teach pendant movemos al robot del P1 al P2, en este caso el P2 representa el menor incremento que se puede mover el robot a partir de P1. Si vemos estos incrementos en un plano se vería como una cuadrícula. En donde en cada intersección de líneas se encuentra un punto "direccionable" es decir un punto que puede ser alcanzado por el robot. De esta forma la resolución espacial puede definirse también como la distancia entre dos puntos adyacentes (en la primer figura sería la distancia entre los puntos P1 y P2), es importante señalar que para un robot que tuviera este espacio de trabajo la distancia entre puntos esta muy exagerada para efectos de explicar el término. 31
32 Exactitud La exactitud se refiere a la capacidad de un robot para situar el extremo de su muñeca en un punto señalado dentro del volumen de trabajo. 32
33 Exactitud La exactitud mantiene una relación directa con la resolución espacial, es decir, con la capacidad del control del robot de dividir en incrementos muy pequeños el volumen de trabajo. En el dibujo si quisiéramos mover el robot exactamente al punto donde se encuentra la pieza de trabajo, el robot solamente podría acercarse al objeto posicionándose en el punto direccionable más próximo. En otras palabras, no podría colocarse exactamente en la posición requerida. Un robot presenta una mayor exactitud cuando su brazo opera cerca de la base. A medida que el brazo se aleja de la base, la exactitud se irá haciendo menor. Esto se debe a que las inexactitudes mecánicas se incrementan al ser extendido el brazo. Otro factor que afecta a la exactitud es el peso de la carga, las cargas más pesadas reducen la exactitud (al incrementar las inexactitudes mecánicas). El peso de la carga también afecta la velocidad de los movimientos del brazo y la resistencia mecánica. 33
34 Repetibilidad La repetibilidad, Radio de la esfera que abarca los puntos alcanzados por el robot tras suficientes movimientos, al ordenarle ir al mismo punto de destino programado, con condiciones de carga, temperatura, etc., iguales 34
35 Repetibilidad En el dibujo anterior al robot se le enseñó el punto programado (PP), al indicarle mediante un comando de programación que regrese al punto PP el robot se puede colocar en el punto de regreso (PR) o en otro punto de regreso que tenga la misma distancia hacia PP. En la figura, esta diferencia entre el punto PP y el PR está muy exagerada, ya que en un robot industrial se espera que la repetibilidad esté en el orden de +/ mm. No existe la repetición absolutamente exacta. 35
Control y Programación n de Robots
 Universidad de Valladolid E.T.S. de Ingenieros Industriales Control y Programación n de Robots Introducción n a la robótica (II) INDICE Definición n de robot industrial Elementos de un robot Programación
Universidad de Valladolid E.T.S. de Ingenieros Industriales Control y Programación n de Robots Introducción n a la robótica (II) INDICE Definición n de robot industrial Elementos de un robot Programación
ROBOTS ANTROPOMÓRFICOS
 1 ROBOTS ANTROPOMÓRFICOS Francisco Araujo faraujo@est.ups.edu.ec Luis Ayala layala@est.ups.edu.ec Cristhian Bermeo cbermeo@est.ups.edu.ec Universidad Politécnica Salesiana Robótica Resumen En este documento
1 ROBOTS ANTROPOMÓRFICOS Francisco Araujo faraujo@est.ups.edu.ec Luis Ayala layala@est.ups.edu.ec Cristhian Bermeo cbermeo@est.ups.edu.ec Universidad Politécnica Salesiana Robótica Resumen En este documento
ROBÓTICA INDUSTRIAL. Tema 1 Fundamentos de la Robótica
 ROBÓTICA INDUSTRIAL Tema 1 Fundamentos de la Robótica Robot El término "robot" se debe a Karel Capek, quien lo utilizó en 1917 por primera vez, para denominar a unas máquinas construidas por el hombre
ROBÓTICA INDUSTRIAL Tema 1 Fundamentos de la Robótica Robot El término "robot" se debe a Karel Capek, quien lo utilizó en 1917 por primera vez, para denominar a unas máquinas construidas por el hombre
Robótica Industrial. Curso. Morfología de un Robot Industrial. Parte I. Profesor Titular Universidad de Los Andes Mérida - Venezuela
 Curso Robótica Industrial Morfología de un Robot Industrial Parte I Profesor Titular Universidad de Los Andes Mérida - Venezuela Robótica Industrial Contenido Introducción Estructura mecánica Sistema de
Curso Robótica Industrial Morfología de un Robot Industrial Parte I Profesor Titular Universidad de Los Andes Mérida - Venezuela Robótica Industrial Contenido Introducción Estructura mecánica Sistema de
Características Morfológicas. Principales características de los Robots.
 Características Morfológicas Principales características de los Robots. Se describen las características más relevantes propias de los robots y se proporcionan valores concretos de las mismas, para determinados
Características Morfológicas Principales características de los Robots. Se describen las características más relevantes propias de los robots y se proporcionan valores concretos de las mismas, para determinados
INDICE INTRODUCCIÓN. CONCEPTOS FUNDAMENTALES. PALANCAS. POLEAS. RUEDA Y EJE. Transmisiones de Banda Simples. Engranajes
 Departamento de Física Universidad de Jaén INTRODUCCIÓN A LAS MÁQUINAS SIMPLES Y COMPUESTAS Aplicación a la Ingeniería de los capítulos del temario de la asignatura FUNDAMENTOS FÍSICOS I (I.T.MINAS): Tema
Departamento de Física Universidad de Jaén INTRODUCCIÓN A LAS MÁQUINAS SIMPLES Y COMPUESTAS Aplicación a la Ingeniería de los capítulos del temario de la asignatura FUNDAMENTOS FÍSICOS I (I.T.MINAS): Tema
Definición y características de robótica industrial
 Robotica industrial Secciones: 1. Anatomía del robot 2. La muñeca de un brazo robótico 3. Espacio de trabajo 4. Programación remota. 5. Sistemas de coordenadas Definición y características de robótica
Robotica industrial Secciones: 1. Anatomía del robot 2. La muñeca de un brazo robótico 3. Espacio de trabajo 4. Programación remota. 5. Sistemas de coordenadas Definición y características de robótica
Estos elementos mecánicos suelen ir montados sobre los ejes de transmisión, que son piezas cilíndricas sobre las cuales se colocan los mecanismos.
 MECANISMOS A. Introducción. Un mecanismo es un dispositivo que transforma el movimiento producido por un elemento motriz (fuerza de entrada) en un movimiento deseado de salida (fuerza de salida) llamado
MECANISMOS A. Introducción. Un mecanismo es un dispositivo que transforma el movimiento producido por un elemento motriz (fuerza de entrada) en un movimiento deseado de salida (fuerza de salida) llamado
Universidad Politécnica de Guanajuato Semana de la Robótica Taller de introducción a la Robótica y Matlab (2 de Octubre de 2012)
") Universidad Politécnica de Guanajuato Semana de la Robótica Taller de introducción a la Robótica y Matlab (2 de Octubre de 2012) Objetivos del curso Revisar conceptos básicos de robótica y el uso inicial
Universidad Politécnica de Guanajuato Semana de la Robótica Taller de introducción a la Robótica y Matlab (2 de Octubre de 2012) Objetivos del curso Revisar conceptos básicos de robótica y el uso inicial
UNIVERSIDAD CARLOS III DE MADRID Departamento de Ingeniería de Sistemas y Automática. Práctica - 4. Uso de los robots
 UNIVERSIDAD CARLOS III DE MADRID Departamento de Ingeniería de Sistemas y Automática Práctica - 4 Uso de los robots AI-II (56 10569) 2º Cuatrimestre 2006 Práctica 1. El robot ABB IRBX400. Funcionamiento
UNIVERSIDAD CARLOS III DE MADRID Departamento de Ingeniería de Sistemas y Automática Práctica - 4 Uso de los robots AI-II (56 10569) 2º Cuatrimestre 2006 Práctica 1. El robot ABB IRBX400. Funcionamiento
DESPACHO: Edificio CPS (Área de Diseño y Fabricación)
") FABRICACIÓN INTEGRADA POR ORD. Y AUTOMATIZACIÓN DE LA PRODUCCIÓN CURSO: 3º MECANICOS HORARIO: LUNES 12:00-14:00 PROFESORES: Carlos Cajal ccajal@unizar.es Francisco Brosed fjbrosed@unizar.es Jesús Casanova
FABRICACIÓN INTEGRADA POR ORD. Y AUTOMATIZACIÓN DE LA PRODUCCIÓN CURSO: 3º MECANICOS HORARIO: LUNES 12:00-14:00 PROFESORES: Carlos Cajal ccajal@unizar.es Francisco Brosed fjbrosed@unizar.es Jesús Casanova
Capítulo 1 Introducción y análisis de sistemas CNC
 Capítulo 1 Introducción y análisis de sistemas CNC INTRODUCCIÓN La evolución del control numérico ha producido la introducción del mismo en grandes, medianas, familiares y pequeñas empresas, lo que ha
Capítulo 1 Introducción y análisis de sistemas CNC INTRODUCCIÓN La evolución del control numérico ha producido la introducción del mismo en grandes, medianas, familiares y pequeñas empresas, lo que ha
Elementos motores. Automatización y Robótica. Elementos Motores
 Elementos motores Misión: Generar el movimiento del robot según las órdenes dadas por la unidad de control. Tipos: Neumáticos (cilindros y motores). Hidráulicos (cilindros y motores). Eléctricos (motores
Elementos motores Misión: Generar el movimiento del robot según las órdenes dadas por la unidad de control. Tipos: Neumáticos (cilindros y motores). Hidráulicos (cilindros y motores). Eléctricos (motores
Una vez descrita la constitución general de un robot, podemos empezar con la
 CAPÍTULO 2 Construcción y Mecanismo de Operación del Brazo Robótico Una vez descrita la constitución general de un robot, podemos empezar con la descripción de nuestro robot, cómo fue construido y cómo
CAPÍTULO 2 Construcción y Mecanismo de Operación del Brazo Robótico Una vez descrita la constitución general de un robot, podemos empezar con la descripción de nuestro robot, cómo fue construido y cómo
_ Antología de Física I. Unidad II Vectores. Elaboró: Ing. Víctor H. Alcalá-Octaviano
 24 Unidad II Vectores 2.1 Magnitudes escalares y vectoriales Unidad II. VECTORES Para muchas magnitudes físicas basta con indicar su valor para que estén perfectamente definidas y estas son las denominadas
24 Unidad II Vectores 2.1 Magnitudes escalares y vectoriales Unidad II. VECTORES Para muchas magnitudes físicas basta con indicar su valor para que estén perfectamente definidas y estas son las denominadas
MORFOLOGÍA DEL ROBOT
 MORFOLOGÍA DEL ROBOT Estructura Mecánica Transmisiones y Reducciones Elementos Motores Sensores Internos Elementos Terminales Introducción a la Robótica. Morfología 1 Estructura mecánica de un robot Introducción
MORFOLOGÍA DEL ROBOT Estructura Mecánica Transmisiones y Reducciones Elementos Motores Sensores Internos Elementos Terminales Introducción a la Robótica. Morfología 1 Estructura mecánica de un robot Introducción
El motor eléctrico. Física. Liceo integrado de zipaquira MOTOR ELECTRICO
 El motor eléctrico Física Liceo integrado de zipaquira MOTOR ELECTRICO Motores y generadores eléctricos, grupo de aparatos que se utilizan para convertir la energía mecánica en eléctrica, o a la inversa,
El motor eléctrico Física Liceo integrado de zipaquira MOTOR ELECTRICO Motores y generadores eléctricos, grupo de aparatos que se utilizan para convertir la energía mecánica en eléctrica, o a la inversa,
Instituto Tecnológico de Saltillo. Robótica. Ing. Ignacio Dávila Ríos. Unidad I Fundamentos
 Instituto Tecnológico de Saltillo Robótica Ing. Ignacio Dávila Ríos Unidad I Fundamentos Guía de estudio correspondiente la unidad 1 1. Mencione brevemente la historia de la Robotica. El alumno desarrollara
Instituto Tecnológico de Saltillo Robótica Ing. Ignacio Dávila Ríos Unidad I Fundamentos Guía de estudio correspondiente la unidad 1 1. Mencione brevemente la historia de la Robotica. El alumno desarrollara
Instituto Tecnológico de Saltillo
 Instituto Tecnológico de Saltillo Cuestionario Robótica Unidad I Temas: antecedentes históricos, relación entre la automatización y la robótica y clasificación y aplicación de la robótica, Volumen de trabajo
Instituto Tecnológico de Saltillo Cuestionario Robótica Unidad I Temas: antecedentes históricos, relación entre la automatización y la robótica y clasificación y aplicación de la robótica, Volumen de trabajo
11 knúmero de publicación: 2 141 353. 51 kint. Cl. 6 : F16H 37/04. Número de solicitud europea: 95919718.7 86 kfecha de presentación : 12.05.
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 141 33 1 kint. Cl. 6 : F16H 37/04 F16H 7/02 B2J 18/00 B2J 9/ H02K 7/116 12 k TRADUCCION DE PATENTE EUROPEA T3 86 k Número
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 141 33 1 kint. Cl. 6 : F16H 37/04 F16H 7/02 B2J 18/00 B2J 9/ H02K 7/116 12 k TRADUCCION DE PATENTE EUROPEA T3 86 k Número
Examen de TEORIA DE MAQUINAS Junio 94 Nombre...
 Examen de TEORIA DE MAQUINAS Junio 94 Nombre... El robot plano de la figura transporta en su extremo una masa puntual de magnitud 5M a velocidad constante horizontal de valor v. Cada brazo del robot tiene
Examen de TEORIA DE MAQUINAS Junio 94 Nombre... El robot plano de la figura transporta en su extremo una masa puntual de magnitud 5M a velocidad constante horizontal de valor v. Cada brazo del robot tiene
DADME UN PUNTO DE. MUNDO Arquímedes
 DADME UN PUNTO DE APOYO Y MOVERÉ EL MUNDO Arquímedes OPERADORES TECNOLÓGICOS Conceptos Básicos: Operador: Es cualquier objeto (o conjunto de objetos) capaz de realizar una función tecnológica dentro de
DADME UN PUNTO DE APOYO Y MOVERÉ EL MUNDO Arquímedes OPERADORES TECNOLÓGICOS Conceptos Básicos: Operador: Es cualquier objeto (o conjunto de objetos) capaz de realizar una función tecnológica dentro de
TEMA 1: REPRESENTACIÓN GRÁFICA. 0.- MANEJO DE ESCUADRA Y CARTABON (Repaso 1º ESO)
") TEMA 1: REPRESENTACIÓN GRÁFICA 0.- MANEJO DE ESCUADRA Y CARTABON (Repaso 1º ESO) Son dos instrumentos de plástico transparente que se suelen usar de forma conjunta. La escuadra tiene forma de triángulo
TEMA 1: REPRESENTACIÓN GRÁFICA 0.- MANEJO DE ESCUADRA Y CARTABON (Repaso 1º ESO) Son dos instrumentos de plástico transparente que se suelen usar de forma conjunta. La escuadra tiene forma de triángulo
Dpto. de tecnología, IES. Cristóbal de Monroy.
 1.- TRENES DE ENGRANAJES Se llama tren de engranajes a aquella transmisión en la que existen más de dos engranajes. Los trenes de engranajes se utilizan cuando: La relación de transmisión que se quiere
1.- TRENES DE ENGRANAJES Se llama tren de engranajes a aquella transmisión en la que existen más de dos engranajes. Los trenes de engranajes se utilizan cuando: La relación de transmisión que se quiere
De acuerdo con sus características podemos considerar tres tipos de vectores:
 CÁLCULO VECTORIAL 1. ESCALARES Y VECTORES 1.1.-MAGNITUDES ESCALARES Y VECTORIALES Existen magnitudes físicas cuyas cantidades pueden ser expresadas mediante un número y una unidad. Otras, en cambio, requieren
CÁLCULO VECTORIAL 1. ESCALARES Y VECTORES 1.1.-MAGNITUDES ESCALARES Y VECTORIALES Existen magnitudes físicas cuyas cantidades pueden ser expresadas mediante un número y una unidad. Otras, en cambio, requieren
MECANISMOS. Veamos los distintos tipos de mecanismos que vamos a estudiar uno a uno.
 MECANISMOS En tecnología, cuando se diseña una máquina, lo más normal es que esté movida por un motor, que tiene un movimiento circular, pero a veces no es ese el tipo de movimiento que necesitamos. En
MECANISMOS En tecnología, cuando se diseña una máquina, lo más normal es que esté movida por un motor, que tiene un movimiento circular, pero a veces no es ese el tipo de movimiento que necesitamos. En
El presente reporte de tesis describe los procesos llevados acabo para el diseño y
 CAPITULO 1.-INTRODUCCIÓN El presente reporte de tesis describe los procesos llevados acabo para el diseño y construcción de un prototipo de sensor de torque. El primer paso, consistió en realizar un estudio
CAPITULO 1.-INTRODUCCIÓN El presente reporte de tesis describe los procesos llevados acabo para el diseño y construcción de un prototipo de sensor de torque. El primer paso, consistió en realizar un estudio
OPERADORES MECANICOS
 OPERADORES MECANICOS 0.- INTRODUCCION 1.- OPERADORES QUE ACUMULAN ENERGIA MECANICA 1.1.- Gomas 1.2.- Muelles 1.3.- Resortes 2.- OPERADORES QUE TRANSFORMAN Y TRANSMITEN LA ENERGIA MECANICA 2.1- Soportes
OPERADORES MECANICOS 0.- INTRODUCCION 1.- OPERADORES QUE ACUMULAN ENERGIA MECANICA 1.1.- Gomas 1.2.- Muelles 1.3.- Resortes 2.- OPERADORES QUE TRANSFORMAN Y TRANSMITEN LA ENERGIA MECANICA 2.1- Soportes
ALGEBRA DE VECTORES Y MATRICES VECTORES
 ALGEBRA DE VECTORES Y MATRICES VECTORES DEFINICIÓN DE ESCALAR: Cantidad física que queda representada mediante un número real acompañado de una unidad. EJEMPLOS: Volumen Área Densidad Tiempo Temperatura
ALGEBRA DE VECTORES Y MATRICES VECTORES DEFINICIÓN DE ESCALAR: Cantidad física que queda representada mediante un número real acompañado de una unidad. EJEMPLOS: Volumen Área Densidad Tiempo Temperatura
Cilindros Rodantes cilindros Rodantes
 M E C Á N I C A Cilindros Rodantes cilindros Rodantes M E C Á N I C A Relacionados con el movimiento de rotación de un sólido existen en el Centro Principia varios módulos. El orden, más conveniente, de
M E C Á N I C A Cilindros Rodantes cilindros Rodantes M E C Á N I C A Relacionados con el movimiento de rotación de un sólido existen en el Centro Principia varios módulos. El orden, más conveniente, de
FISICA Y QUÍMICA 4º ESO 1.- TRABAJO MECÁNICO.
 1.- TRABAJO MECÁNICO. Si a alguien que sostiene un objeto sin moverse le preguntas si hace trabajo, probablemente te responderá que sí. Sin embargo, desde el punto de vista de la Física, no realiza trabajo;
1.- TRABAJO MECÁNICO. Si a alguien que sostiene un objeto sin moverse le preguntas si hace trabajo, probablemente te responderá que sí. Sin embargo, desde el punto de vista de la Física, no realiza trabajo;
UNIVERSIDAD TÉCNICA DE AMBATO FACULTAD DE INGENIERÍA EN SISTEMAS, ELECTRÓNICA E INDUSTRIAL
 UNIVERSIDAD TÉCNICA DE AMBATO FACULTAD DE INGENIERÍA EN SISTEMAS, ELECTRÓNICA E INDUSTRIAL CARRERA DE INGENIERÍA INDUSTRIAL Y PROCESOS DE AUTOMATIZACIÓN ROBOTICA Tema: INTRODUCCION A LA ROBOTICA Estudiante:
UNIVERSIDAD TÉCNICA DE AMBATO FACULTAD DE INGENIERÍA EN SISTEMAS, ELECTRÓNICA E INDUSTRIAL CARRERA DE INGENIERÍA INDUSTRIAL Y PROCESOS DE AUTOMATIZACIÓN ROBOTICA Tema: INTRODUCCION A LA ROBOTICA Estudiante:
SERVOMOTORES. Los servos se utilizan frecuentemente en sistemas de radiocontrol, mecatrónicos y robótica, pero su uso no está limitado a estos.
 SERVOMOTORES Un servomotor (también llamado Servo) es un dispositivo similar a un motor DC, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación y mantenerse estable
SERVOMOTORES Un servomotor (también llamado Servo) es un dispositivo similar a un motor DC, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación y mantenerse estable
Fig. 3.1 Brazo Mecánico Utilizado. que es capaz de girar igualmente 180º, (Fig. 3.1).
.") Capítulo 3 El Brazo Mecánico. En este capítulo se hablará de los aspectos generales del robot, en cuanto a su arquitectura respecta. Es importante dar crédito al Ing. Luís Maus Bolaños del departamento
Capítulo 3 El Brazo Mecánico. En este capítulo se hablará de los aspectos generales del robot, en cuanto a su arquitectura respecta. Es importante dar crédito al Ing. Luís Maus Bolaños del departamento
Componentes: RESISTENCIAS FIJAS
 ELECTRÓNICA ELECTRÓNICA Componentes: RESISTENCIAS FIJAS Componentes: RESISTENCIAS VARIABLES Componentes: RESISTENCIAS DEPENDIENTES Componentes: RESISTENCIAS DEPENDIENTES Componentes: CONDENSADORES Componentes:
ELECTRÓNICA ELECTRÓNICA Componentes: RESISTENCIAS FIJAS Componentes: RESISTENCIAS VARIABLES Componentes: RESISTENCIAS DEPENDIENTES Componentes: RESISTENCIAS DEPENDIENTES Componentes: CONDENSADORES Componentes:
Definición de vectores
 Definición de vectores Un vector es todo segmento de recta dirigido en el espacio. Cada vector posee unas características que son: Origen: O también denominado Punto de aplicación. Es el punto exacto sobre
Definición de vectores Un vector es todo segmento de recta dirigido en el espacio. Cada vector posee unas características que son: Origen: O también denominado Punto de aplicación. Es el punto exacto sobre
Tema 1. Curso 2015/16 Semestre 1. Supuesto 1. Supuesto 2.
 Tema 1 Supuesto 1. Curso 2015/16 Semestre 1 Un fabricante de cables de interconexión está diseñando un cable para ser usado como interfaz digital de alta velocidad entre dos equipos. Con el fin de ofrecer
Tema 1 Supuesto 1. Curso 2015/16 Semestre 1 Un fabricante de cables de interconexión está diseñando un cable para ser usado como interfaz digital de alta velocidad entre dos equipos. Con el fin de ofrecer
08/05/2013 FIMAAS UTP. Ing. Automotriz. Profesor: Carlos Alvarado de la Portilla
 UTP FIMAAS Ing. Automotriz Curso: Mecanismos del automóvil Sesión Nº 5: La caja de transmisión mecánica, funcion, descripción, funcionamiento, tipos. 1 Bibliografía http://www.youtube.com/watch?v=9j- 3xw0VxiM&feature=related
UTP FIMAAS Ing. Automotriz Curso: Mecanismos del automóvil Sesión Nº 5: La caja de transmisión mecánica, funcion, descripción, funcionamiento, tipos. 1 Bibliografía http://www.youtube.com/watch?v=9j- 3xw0VxiM&feature=related
Alta tecnología y diseño para modelos profesionales
 Alta tecnología y diseño para modelos profesionales El corte que apunta hacia el futuro Conexión eléctrica Para aspiraciones sin arranque automático Hoja de sierra Desarrollado para cortes finos de alta
Alta tecnología y diseño para modelos profesionales El corte que apunta hacia el futuro Conexión eléctrica Para aspiraciones sin arranque automático Hoja de sierra Desarrollado para cortes finos de alta
Morfología de los robots industriales
 2.- Estudio del manipulador 2.1 Morfología de los robots industriales (Apartados 2.1, 2.2, 2.5 y 9.2 de BARRIENTOS) (Apartados 2.1, 2.2 y 2.3 de TORRES) 2.2 Análisis geométrico y cinemático (Capítulos
2.- Estudio del manipulador 2.1 Morfología de los robots industriales (Apartados 2.1, 2.2, 2.5 y 9.2 de BARRIENTOS) (Apartados 2.1, 2.2 y 2.3 de TORRES) 2.2 Análisis geométrico y cinemático (Capítulos
51 Int. CI.: B25J 9/16 (2006.01) TRADUCCIÓN DE PATENTE EUROPEA
 TRADUCCIÓN DE PATENTE EUROPEA") 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 26 666 1 Int. CI.: B2J 9/16 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Fecha de presentación y número de la solicitud europea:
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 26 666 1 Int. CI.: B2J 9/16 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Fecha de presentación y número de la solicitud europea:
TIPOS DE RESTRICCIONES
 RESTRICCIONES: Las restricciones son reglas que determinan la posición relativa de las distintas geometrías existentes en el archivo de trabajo. Para poder aplicarlas con rigor es preciso entender el grado
RESTRICCIONES: Las restricciones son reglas que determinan la posición relativa de las distintas geometrías existentes en el archivo de trabajo. Para poder aplicarlas con rigor es preciso entender el grado
Bloque II: Principios de máquinas
 Bloque II: Principios de máquinas 1. Conceptos Fundamentales A. Trabajo En términos de la física y suponiendo un movimiento rectilíneo de un objeto al que se le aplica una fuerza F, se define como el producto
Bloque II: Principios de máquinas 1. Conceptos Fundamentales A. Trabajo En términos de la física y suponiendo un movimiento rectilíneo de un objeto al que se le aplica una fuerza F, se define como el producto
2 Sea una unidad de disco duro de brazo móvil con las siguientes características:
 1 Sea una unidad de disco duro de brazo móvil con las siguientes características: 18 superficies, 20.331 cilindros y 400 sectores por pista. Sectores de 1.024 bytes de información neta. Velocidad de rotación:
1 Sea una unidad de disco duro de brazo móvil con las siguientes características: 18 superficies, 20.331 cilindros y 400 sectores por pista. Sectores de 1.024 bytes de información neta. Velocidad de rotación:
35 Facultad de Ciencias Universidad de Los Andes Mérida-Venezuela. Potencial Eléctrico
 q 1 q 2 Prof. Félix Aguirre 35 Energía Electrostática Potencial Eléctrico La interacción electrostática es representada muy bien a través de la ley de Coulomb, esto es: mediante fuerzas. Existen, sin embargo,
q 1 q 2 Prof. Félix Aguirre 35 Energía Electrostática Potencial Eléctrico La interacción electrostática es representada muy bien a través de la ley de Coulomb, esto es: mediante fuerzas. Existen, sin embargo,
Nivelación de Matemática MTHA UNLP 1. Vectores
 Nivelación de Matemática MTHA UNLP 1 1. Definiciones básicas Vectores 1.1. Magnitudes escalares y vectoriales. Hay magnitudes que quedan determinadas dando un solo número real: su medida. Por ejemplo:
Nivelación de Matemática MTHA UNLP 1 1. Definiciones básicas Vectores 1.1. Magnitudes escalares y vectoriales. Hay magnitudes que quedan determinadas dando un solo número real: su medida. Por ejemplo:
Redes I Clase # 3. Licda. Consuelo E. Sandoval
 Redes I Clase # 3 Licda. Consuelo E. Sandoval 1. PROCESAMIENTO CENTRALIZADO El proceso centralizado es utilizado en los Mainframes, Minicomputadoras y en las Micro multiusuario. Los enlaces a estas máquinas
Redes I Clase # 3 Licda. Consuelo E. Sandoval 1. PROCESAMIENTO CENTRALIZADO El proceso centralizado es utilizado en los Mainframes, Minicomputadoras y en las Micro multiusuario. Los enlaces a estas máquinas
PROYECTO FISCA ELECTRICA GENERADOR DE ELECTRICIDAD ECOLÓGICO LORENA CARRANZA ILLO WILLIAM ANDRES RUIZ
 PROYECTO FISCA ELECTRICA GENERADOR DE ELECTRICIDAD ECOLÓGICO LORENA CARRANZA ILLO WILLIAM ANDRES RUIZ ESCUELA COLOMBIANA DE CARRERAS INDUSTRIALES TECNOLOGIA EN GESTION DE PROCESOS INDUSTRIALES FISCA ELECTRICA
PROYECTO FISCA ELECTRICA GENERADOR DE ELECTRICIDAD ECOLÓGICO LORENA CARRANZA ILLO WILLIAM ANDRES RUIZ ESCUELA COLOMBIANA DE CARRERAS INDUSTRIALES TECNOLOGIA EN GESTION DE PROCESOS INDUSTRIALES FISCA ELECTRICA
CARACTERÍSTICAS TÉCNICAS
 ECOTERMO CARACTERÍSTICAS TÉCNICAS 2 DESCRIPCIÓN DEL CALENTADOR 3 REGULACIÓN DE LA TEMPERATURA DEL AGUA _ 5 CONEXIÓN A LA RED DE AGUA POTABLE 5 CONEXIÓN A LA RED ELÉCTRICA 6 PRINCIPIO DE FUNCIONAMIENTO
ECOTERMO CARACTERÍSTICAS TÉCNICAS 2 DESCRIPCIÓN DEL CALENTADOR 3 REGULACIÓN DE LA TEMPERATURA DEL AGUA _ 5 CONEXIÓN A LA RED DE AGUA POTABLE 5 CONEXIÓN A LA RED ELÉCTRICA 6 PRINCIPIO DE FUNCIONAMIENTO
Calibración de Robots usando láser tracker
 Automated Precision Inc. Empowering Metrology Solutions Calibración de Robots usando láser tracker M.I. Octavio Icasio Hernandez Objetivo: Calibración de robots (manipuladores) de n grados de libertad,
Automated Precision Inc. Empowering Metrology Solutions Calibración de Robots usando láser tracker M.I. Octavio Icasio Hernandez Objetivo: Calibración de robots (manipuladores) de n grados de libertad,
OSCILOSCOPIO FUNCIONAMIENTO:
 OSCILOSCOPIO El osciloscopio es un instrumento electrónico - digital o analógico- que permite visualizar y efectuar medidas sobre señales eléctricas. Para esto cuenta con una pantalla con un sistema de
OSCILOSCOPIO El osciloscopio es un instrumento electrónico - digital o analógico- que permite visualizar y efectuar medidas sobre señales eléctricas. Para esto cuenta con una pantalla con un sistema de
METROS CÚBICOS O LITROS?
 METROS CÚBICOS O LITROS? 10 Comprende qué son las unidades de volumen (litros y decímetros cúbicos). En Presentación de Contenidos, para explicar las unidades de volumen se explica la diferencia entre
METROS CÚBICOS O LITROS? 10 Comprende qué son las unidades de volumen (litros y decímetros cúbicos). En Presentación de Contenidos, para explicar las unidades de volumen se explica la diferencia entre
TEMA 2: CIRCUITOS ELÉCTRICOS: CIRCUITOS SERIE, PARALELO Y MIXTOS. CÁLCULO DE MAGNITUDES EN UN CIRCUITO.
 CPI Antonio Orza Couto 3º ESO TECNOLOGÍA TEMA-2 ELECTRICIDAD: CIRCUITOS TEMA 2: CIRCUITOS ELÉCTRICOS: CIRCUITOS SERIE, PARALELO Y MIXTOS. CÁLCULO DE MAGNITUDES EN UN CIRCUITO. 1. CIRCUITO ELÉCTRICO Definición
CPI Antonio Orza Couto 3º ESO TECNOLOGÍA TEMA-2 ELECTRICIDAD: CIRCUITOS TEMA 2: CIRCUITOS ELÉCTRICOS: CIRCUITOS SERIE, PARALELO Y MIXTOS. CÁLCULO DE MAGNITUDES EN UN CIRCUITO. 1. CIRCUITO ELÉCTRICO Definición
PLANEAMIENTO DE LAS COMUNICACIONES EN EMERGENCIAS REDES PRIVADAS DISPONIBLES EN EMERGENCIAS TELEFONÍA VÍA SATÉLITE. Índice
 Índice 1. REDES PRIVADAS. TELEFONÍA VIA SATÉLITE...2 1.1 SERVICIOS VIA SATELITE... 2 1.1.1 SATELITES GEOESTACIONARIOS... 2 1.1.2 Satelites no Geoestacionarios... 4 1.1.2.1 CARACTERÍSTICAS...4 1.1.2.2 TIPOS.
Índice 1. REDES PRIVADAS. TELEFONÍA VIA SATÉLITE...2 1.1 SERVICIOS VIA SATELITE... 2 1.1.1 SATELITES GEOESTACIONARIOS... 2 1.1.2 Satelites no Geoestacionarios... 4 1.1.2.1 CARACTERÍSTICAS...4 1.1.2.2 TIPOS.
EJERCICIOS DE MECANISMOS
 DEPARTAMENTO DE TECNOLOGÍA I.E.S. Iturralde EJERCICIOS DE MECANISMOS CURSO: DEPARTAMENTO DE TECNOLOGÍA 0 PALANCAS EJERCICIOS DE ELECTRICIDAD PALANCAS 1. Enumera la ley de la palanca y escribe su fórmula
DEPARTAMENTO DE TECNOLOGÍA I.E.S. Iturralde EJERCICIOS DE MECANISMOS CURSO: DEPARTAMENTO DE TECNOLOGÍA 0 PALANCAS EJERCICIOS DE ELECTRICIDAD PALANCAS 1. Enumera la ley de la palanca y escribe su fórmula
1. FUNCION Y TIPOS GENERALES DE INSTALACIONES DE ATRAQUE
 1. FUNCION Y TIPOS GENERALES DE INSTALACIONES DE ATRAQUE La explotación portuaria tiene como objetivo fundamental conseguir la transferencia de mercancías entre los medios de transporte marítimos y terrestres
1. FUNCION Y TIPOS GENERALES DE INSTALACIONES DE ATRAQUE La explotación portuaria tiene como objetivo fundamental conseguir la transferencia de mercancías entre los medios de transporte marítimos y terrestres
asegurar la calidad y aumentar la eficiencia. sistemas de variables que toman una infinidad de valores.
 79 3.3 Fundamentos de la ingeniería de control La ingeniería de control tiene por objeto el manejo automático de un proceso que de otra manera tendría que ser controlado manualmente. En muchas aplicaciones
79 3.3 Fundamentos de la ingeniería de control La ingeniería de control tiene por objeto el manejo automático de un proceso que de otra manera tendría que ser controlado manualmente. En muchas aplicaciones
Grupo de Sistemas y Comunicaciones. jmplaza@gsyc.es. Curso 2007-2008
 ROBÓTICA Grupo de Sistemas y Comunicaciones jmplaza@gsyc.es Curso 2007-2008 1 Actuadores ROBÓTICA índice 2 índice Definiciones Tipos de actuadores Actuadores controlados Transmisiones y reducciones Locomoción
ROBÓTICA Grupo de Sistemas y Comunicaciones jmplaza@gsyc.es Curso 2007-2008 1 Actuadores ROBÓTICA índice 2 índice Definiciones Tipos de actuadores Actuadores controlados Transmisiones y reducciones Locomoción
Líneas Equipotenciales
 Líneas Equipotenciales A.M. Velasco (133384) J.P. Soler (133380) O.A. Botina (133268) Departamento de física, facultad de ciencias, Universidad Nacional de Colombia Resumen. En esta experiencia se estudia
Líneas Equipotenciales A.M. Velasco (133384) J.P. Soler (133380) O.A. Botina (133268) Departamento de física, facultad de ciencias, Universidad Nacional de Colombia Resumen. En esta experiencia se estudia
El proyecto Eratóstenes. Guía para el estudiante.
 El proyecto Eratóstenes. Guía para el estudiante. En esta actividad vas a trabajar en colaboración con estudiantes de otra escuela para medir el radio de la Tierra. Vas a usar los mismos métodos y principios
El proyecto Eratóstenes. Guía para el estudiante. En esta actividad vas a trabajar en colaboración con estudiantes de otra escuela para medir el radio de la Tierra. Vas a usar los mismos métodos y principios
MANUAL DEL PROPIETARIO SISTEMA UNIVERSAL DE VIA-DE-TRASPASO DE 3-VIAS NO. DE CATALOGO 40-1299A
 MANUAL DEL PROPIETARIO SISTEMA UNIVERSAL DE VIA-DE-TRASPASO DE 3-VIAS NO. DE CATALOGO 40-1299A POR QUE NECESITA UN SISTEMA DE VIA-DE-TRASPASO? Un sistema de bocinas bién-diseñado cubre todo el espectro
MANUAL DEL PROPIETARIO SISTEMA UNIVERSAL DE VIA-DE-TRASPASO DE 3-VIAS NO. DE CATALOGO 40-1299A POR QUE NECESITA UN SISTEMA DE VIA-DE-TRASPASO? Un sistema de bocinas bién-diseñado cubre todo el espectro
MECANICA CLASICA Segundo cuatrimestre de 2007. Cinemática y dinámica del cuerpo rígido, ángulos de Euler, Ecuaciones de Euler.
 MECANICA CLASICA Segundo cuatrimestre de 2007. Cinemática y dinámica del cuerpo rígido, ángulos de Euler, Ecuaciones de Euler. Problema 1: Analizar los siguientes puntos. a) Mostrar que la velocidad angular
MECANICA CLASICA Segundo cuatrimestre de 2007. Cinemática y dinámica del cuerpo rígido, ángulos de Euler, Ecuaciones de Euler. Problema 1: Analizar los siguientes puntos. a) Mostrar que la velocidad angular
TEMA 5 : MECANISMOS RELACIÓN 1: PROBLEMAS DE PALANCAS.
 NOMBRE ALUMNO Y CURSO: TEMA 5 : MECANISMOS EL DÍA DEL CONTROL el alumno deberá entregar la libreta con los apuntes y esquemas realizados en clase y en estas fichas los ejercicios resueltos y corregidos.
NOMBRE ALUMNO Y CURSO: TEMA 5 : MECANISMOS EL DÍA DEL CONTROL el alumno deberá entregar la libreta con los apuntes y esquemas realizados en clase y en estas fichas los ejercicios resueltos y corregidos.
Objetivos. 19 mm 24 mm Gran angular 28 mm 50 mm Lente normal 70 mm 105 mm 135 mm Teleobjetivo 200 mm 400 mm. Lente gran angular:
 26 27 Objetivos La cámara fotográfica básicamente está compuesta por dos partes: el cuerpo y la lente. La lente es mucho más importante que el cuerpo ya que definirá la calidad de la imagen. Los objetivos
26 27 Objetivos La cámara fotográfica básicamente está compuesta por dos partes: el cuerpo y la lente. La lente es mucho más importante que el cuerpo ya que definirá la calidad de la imagen. Los objetivos
RENDIMIENTO DE: CARGADOR FRONTAL Y RETROEXCAVADORA
 RENDIMIENTO DE: CARGADOR FRONTAL Y RETROEXCAVADORA Algunos equipos de carga son el cargador frontal, retroexcavadora, pala hidráulica, pala mecánica, draga y otras, que en ocasiones, también se utilizan
RENDIMIENTO DE: CARGADOR FRONTAL Y RETROEXCAVADORA Algunos equipos de carga son el cargador frontal, retroexcavadora, pala hidráulica, pala mecánica, draga y otras, que en ocasiones, también se utilizan
MECANICA DEL APARATO LOCOMOTOR: EL CUERPO HUMANO COMO SISTEMA DE PALANCAS
 TEMA 5: MECANICA DEL APARATO LOCOMOTOR: EL CUERPO HUMANO COMO SISTEMA DE PALANCAS INTRODUCCION Antes de iniciar el estudio del movimiento del cuerpo humano desde el punto de vista mecánico, es decir, como
TEMA 5: MECANICA DEL APARATO LOCOMOTOR: EL CUERPO HUMANO COMO SISTEMA DE PALANCAS INTRODUCCION Antes de iniciar el estudio del movimiento del cuerpo humano desde el punto de vista mecánico, es decir, como
Motores paso a paso (PAP) Instrumentación y Comunicaciones Industriales
 Instrumentación y Comunicaciones Industriales") Motores paso a paso (PAP) 1 Ventajas El ángulo de rotación es proporcional a los pulsos de entrada. Exactitud en la posición y repetición de movimientos. Los motores PaP tienen un error de 3 a 5% del paso
Motores paso a paso (PAP) 1 Ventajas El ángulo de rotación es proporcional a los pulsos de entrada. Exactitud en la posición y repetición de movimientos. Los motores PaP tienen un error de 3 a 5% del paso
Entonces el trabajo de la fuerza eléctrica es : =F d (positivo porque la carga se desplaza en el sentido en que actúa la fuerza (de A a B)
") Consideremos la siguiente situación. Una carga Q que genera un campo eléctrico uniforme, y sobre este campo eléctrico se ubica una carga puntual q.de tal manara que si las cargas son de igual signo la
Consideremos la siguiente situación. Una carga Q que genera un campo eléctrico uniforme, y sobre este campo eléctrico se ubica una carga puntual q.de tal manara que si las cargas son de igual signo la
TEMA 7. PROGRAMACIÓN BÁSICA DE TORNOS DE CNC
 TEMA 7. PROGRAMACIÓN BÁSICA DE TORNOS DE CNC PARTE 1: FUNCIONES PREPARATORIAS GENERALES: FUNCIONES DE MOVIMIENTO LINEAL Y CIRCULAR. TRANSICIÓN ENTRE BLOQUES (ARISTA VIVA - ARISTA MATADA). SELECCIÓN DE
TEMA 7. PROGRAMACIÓN BÁSICA DE TORNOS DE CNC PARTE 1: FUNCIONES PREPARATORIAS GENERALES: FUNCIONES DE MOVIMIENTO LINEAL Y CIRCULAR. TRANSICIÓN ENTRE BLOQUES (ARISTA VIVA - ARISTA MATADA). SELECCIÓN DE
1 Estática Básica Prohibida su reproducción sin autorización. CONCEPTOS DE FISICA MECANICA. Conceptos de Física Mecánica
 1 CONCEPTOS DE FISICA MECANICA Introducción La parte de la física mecánica se puede dividir en tres grandes ramas de acuerdo a lo que estudia cada una de ellas. Así, podemos clasificarlas según lo siguiente:
1 CONCEPTOS DE FISICA MECANICA Introducción La parte de la física mecánica se puede dividir en tres grandes ramas de acuerdo a lo que estudia cada una de ellas. Así, podemos clasificarlas según lo siguiente:
GREENSTAR CANTIELEVER. Guía Usuario. V5 - Castellano
 GREENSTAR CANTIELEVER Guía Usuario V5 - Castellano Contenido 1 Información General 1.1 Greenstar 1.2 Objetivo 1.3 Copyrigth 1.4 Seguridad 2 Información Técnica 2.1 Montaje 2.1.1 Funciones 2.1.2 Nomenclatura
GREENSTAR CANTIELEVER Guía Usuario V5 - Castellano Contenido 1 Información General 1.1 Greenstar 1.2 Objetivo 1.3 Copyrigth 1.4 Seguridad 2 Información Técnica 2.1 Montaje 2.1.1 Funciones 2.1.2 Nomenclatura
k 11 N. de publicación: ES 2 031 411 k 21 Número de solicitud: 9002309 k 51 Int. Cl. 5 : B23F 21/12 k 73 Titular/es: Juan Luis Pena Cea
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA k 11 N. de publicación: ES 2 031 411 k 21 Número de solicitud: 9002309 k 51 Int. Cl. 5 : B23F 21/12 k 12 PATENTEDEINVENCION A6 k 22 Fecha de presentación:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA k 11 N. de publicación: ES 2 031 411 k 21 Número de solicitud: 9002309 k 51 Int. Cl. 5 : B23F 21/12 k 12 PATENTEDEINVENCION A6 k 22 Fecha de presentación:
MAQUINAS DE MEDIR POR COORDENADAS (MMC)
") MAQUINAS DE MEDIR POR COORDENADAS (MMC) Los problemas de la metrología: Intercambiabilidad Reducir los costos totales de producción Mejorar las prestaciones del producto Centros de Control de Calidad versátiles
MAQUINAS DE MEDIR POR COORDENADAS (MMC) Los problemas de la metrología: Intercambiabilidad Reducir los costos totales de producción Mejorar las prestaciones del producto Centros de Control de Calidad versátiles
MOMENTO ANGULAR Y TORCAS COMO VECTORES
 MOMENTO ANGULAR Y TORCAS COMO VECTORES OBJETIVOS: Identificar la torca y el momento angular como magnitudes vectoriales. Examinar las propiedades matemáticas del producto cruz y algunas aplicaciones. Describir
MOMENTO ANGULAR Y TORCAS COMO VECTORES OBJETIVOS: Identificar la torca y el momento angular como magnitudes vectoriales. Examinar las propiedades matemáticas del producto cruz y algunas aplicaciones. Describir
TEMA 5 TRABAJO, POTENCIA Y ENERGIA
 TEMA 5 TRABAJO, POTENCIA Y ENERGIA 1. TRABAJO Y ENERGIA. No debemos confundir esfuerzo muscular con trabajo. Cuando aplicamos una fuerza, hacemos un esfuerzo muscular.podemos decir que se realiza trabajo,
TEMA 5 TRABAJO, POTENCIA Y ENERGIA 1. TRABAJO Y ENERGIA. No debemos confundir esfuerzo muscular con trabajo. Cuando aplicamos una fuerza, hacemos un esfuerzo muscular.podemos decir que se realiza trabajo,
Nota Técnica Abril 2014
 LÁMPARAS LED QUE QUEDAN SEMIENCENDIDAS O PARPADEAN: En ocasiones ocurre que al realizar una sustitución en donde antes teníamos una halógena por una lámpara LED, la nueva lámpara se queda semiencendida
LÁMPARAS LED QUE QUEDAN SEMIENCENDIDAS O PARPADEAN: En ocasiones ocurre que al realizar una sustitución en donde antes teníamos una halógena por una lámpara LED, la nueva lámpara se queda semiencendida
En la 3ª entrega de este trabajo nos centraremos en la relación entre magnitudes eléctricas, hecho que explica la famosa Ley de Ohm.
 3º parte En la 3ª entrega de este trabajo nos centraremos en la relación entre magnitudes eléctricas, hecho que explica la famosa Ley de Ohm. ELEMENTOS DEL CIRCUITO ELÉCTRICO Para poder relacionar las
3º parte En la 3ª entrega de este trabajo nos centraremos en la relación entre magnitudes eléctricas, hecho que explica la famosa Ley de Ohm. ELEMENTOS DEL CIRCUITO ELÉCTRICO Para poder relacionar las
Seminario de Electricidad Básica
 Seminario de Electricidad Básica Qué es la Electricidad? Es una forma de energía natural que puede ser producida artificialmente y que se caracteriza por su poder de transformación; ya que se puede convertir
Seminario de Electricidad Básica Qué es la Electricidad? Es una forma de energía natural que puede ser producida artificialmente y que se caracteriza por su poder de transformación; ya que se puede convertir
CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION
 CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION Como hemos dicho anteriormente, los instrumentos de medición hacen posible la observación de los fenómenos eléctricos y su cuantificación. Ahora
CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION Como hemos dicho anteriormente, los instrumentos de medición hacen posible la observación de los fenómenos eléctricos y su cuantificación. Ahora
INGENIERÍA DE MÁQUINAS 5º INGENIERÍA INDUSTRIAL
 5º INGENIERÍA INDUSTRIAL Autor: Antonio Delgado Díez ÍNDICE 1. Introducción Definición de actuador Tipos de actuadores Definición de actuador hidráulico 2. Ventajas de los actuadores hidráulicos 3. Desventajas
5º INGENIERÍA INDUSTRIAL Autor: Antonio Delgado Díez ÍNDICE 1. Introducción Definición de actuador Tipos de actuadores Definición de actuador hidráulico 2. Ventajas de los actuadores hidráulicos 3. Desventajas
Te damos los elementos básicos de los vectores para que puedas entender las operaciones básicas.
 4 año secundario Vectores, refrescando conceptos adquiridos Te damos los elementos básicos de los vectores para que puedas entender las operaciones básicas. El término vector puede referirse al: concepto
4 año secundario Vectores, refrescando conceptos adquiridos Te damos los elementos básicos de los vectores para que puedas entender las operaciones básicas. El término vector puede referirse al: concepto
Radiación de una lámpara de incandescencia
 Prueba experimental. Radiación de una lámpara de incandescencia OBJETIVO. Se va a estudiar experimentalmente la radiación emitida por el filamento de una lámpara de incandescencia y su dependencia con
Prueba experimental. Radiación de una lámpara de incandescencia OBJETIVO. Se va a estudiar experimentalmente la radiación emitida por el filamento de una lámpara de incandescencia y su dependencia con
Las Mareas INDICE. 1. Introducción 2. Fuerza de las mareas 3. Por que tenemos dos mareas al día? 4. Predicción de marea 5. Aviso para la navegación
 Las Mareas INDICE 1. Introducción 2. Fuerza de las mareas 3. Por que tenemos dos mareas al día? 4. Predicción de marea 5. Aviso para la navegación Introducción La marea es la variación del nivel de la
Las Mareas INDICE 1. Introducción 2. Fuerza de las mareas 3. Por que tenemos dos mareas al día? 4. Predicción de marea 5. Aviso para la navegación Introducción La marea es la variación del nivel de la
CONTROL Y PROGRAMACIÓN DE ROBOTS
 CONTROL Y PROGRAMACIÓN DE ROBOTS GUIA FACIL DE UTILIZACIÓN DEL SCORBOT ER-VII: Esta guía fácil, pretende aportar unos pocos conocimientos básicos, sobre el manejo y programación del Scorbot ER-VII, de
CONTROL Y PROGRAMACIÓN DE ROBOTS GUIA FACIL DE UTILIZACIÓN DEL SCORBOT ER-VII: Esta guía fácil, pretende aportar unos pocos conocimientos básicos, sobre el manejo y programación del Scorbot ER-VII, de
PUESTO INFORMÁTICO ADAPTADO
 UNIVERSIDAD REY JUAN CARLOS UNIDAD DE ATENCIÓN A LA DISCAPACIDAD PUESTO INFORMÁTICO ADAPTADO Manual de uso ÍNDICE 1. Descripción del puesto y sus componentes..pág2. 2. Sistema de préstamo Pág10. 3. Localización
UNIVERSIDAD REY JUAN CARLOS UNIDAD DE ATENCIÓN A LA DISCAPACIDAD PUESTO INFORMÁTICO ADAPTADO Manual de uso ÍNDICE 1. Descripción del puesto y sus componentes..pág2. 2. Sistema de préstamo Pág10. 3. Localización
VECTORES: VOCABULARIO 1. Abscisa de un punto. 2. Ordenada de un punto. 3. Concepto de vector. 4. Coordenadas o componentes de un vector. 5.
 VECTORES: VOCABULARIO 1. Abscisa de un punto. 2. Ordenada de un punto. 3. Concepto de vector. 4. Coordenadas o componentes de un vector. 5. Elementos de un vector. 6. Concepto de origen de un vector. 7.
VECTORES: VOCABULARIO 1. Abscisa de un punto. 2. Ordenada de un punto. 3. Concepto de vector. 4. Coordenadas o componentes de un vector. 5. Elementos de un vector. 6. Concepto de origen de un vector. 7.
1. Vectores 1.1. Definición de un vector en R2, R3 (Interpretación geométrica), y su generalización en Rn.
, y su generalización en Rn.") 1. VECTORES INDICE 1.1. Definición de un vector en R 2, R 3 (Interpretación geométrica), y su generalización en R n...2 1.2. Operaciones con vectores y sus propiedades...6 1.3. Producto escalar y vectorial
1. VECTORES INDICE 1.1. Definición de un vector en R 2, R 3 (Interpretación geométrica), y su generalización en R n...2 1.2. Operaciones con vectores y sus propiedades...6 1.3. Producto escalar y vectorial
Int. Cl.: 74 Agente: Ungría López, Javier
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 361 129 1 Int. Cl.: B2J 1/00 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Número de solicitud europea: 078289. 96 Fecha de
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 361 129 1 Int. Cl.: B2J 1/00 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Número de solicitud europea: 078289. 96 Fecha de
1º Tema.- Conceptos y definiciones en cinemática.
 Universidad de Huelva ESCUELA POLITECNICA SUPERIOR Departamento de Ingeniería Minera, Mecánica y Energética Asignatura: Ingeniería de Máquinas [570004027] 5º curso de Ingenieros Industriales 1º Tema.-
Universidad de Huelva ESCUELA POLITECNICA SUPERIOR Departamento de Ingeniería Minera, Mecánica y Energética Asignatura: Ingeniería de Máquinas [570004027] 5º curso de Ingenieros Industriales 1º Tema.-
Capitulo V Administración de memoria
 Capitulo V Administración de memoria Introducción. Una de las tareas más importantes y complejas de un sistema operativo es la gestión de memoria. La gestión de memoria implica tratar la memoria principal
Capitulo V Administración de memoria Introducción. Una de las tareas más importantes y complejas de un sistema operativo es la gestión de memoria. La gestión de memoria implica tratar la memoria principal
E.U.I.T.I.Z. (1º Electrónicos) Curso 2006-07 Electricidad y Electrometría. P. resueltos Tema 1 1/27
 Curso 2006-07 Electricidad y Electrometría. P. resueltos Tema 1 1/27") E.U.I.T.I.Z. (1º Electrónicos) Curso 2006-07 Electricidad y Electrometría. P. resueltos Tema 1 1/27 Tema 1. Problemas resueltos 1. Cuáles son las similitudes y diferencias entre la ley de Coulomb y la
E.U.I.T.I.Z. (1º Electrónicos) Curso 2006-07 Electricidad y Electrometría. P. resueltos Tema 1 1/27 Tema 1. Problemas resueltos 1. Cuáles son las similitudes y diferencias entre la ley de Coulomb y la
3.9. Tutorial Excavadora
 3.9. Tutorial Excavadora 3.9.1. Introducción En este tutorial se va a simular el funcionamiento de una retroexcavadora. Como se sabe, el movimiento de una excavadora está gobernado por unos cilindros hidráulicos,
3.9. Tutorial Excavadora 3.9.1. Introducción En este tutorial se va a simular el funcionamiento de una retroexcavadora. Como se sabe, el movimiento de una excavadora está gobernado por unos cilindros hidráulicos,
UNIDAD 6.- NEUMÁTICA.
 UNIDAD 6.- NEUMÁTICA. 1.-ELEMENTOS DE UN CIRCUITO NEUMÁTICO. El aire comprimido se puede utilizar de dos maneras distintas: Como elemento de mando y control: permitiendo que se abran o cierren determinadas
UNIDAD 6.- NEUMÁTICA. 1.-ELEMENTOS DE UN CIRCUITO NEUMÁTICO. El aire comprimido se puede utilizar de dos maneras distintas: Como elemento de mando y control: permitiendo que se abran o cierren determinadas
CAPÍTULO III MARCO TEÓRICO. Cada día cambian las condiciones de los mercados debido a diferentes factores como: el
 CAPÍTULO III MARCO TEÓRICO 3.1 Introducción Cada día cambian las condiciones de los mercados debido a diferentes factores como: el incremento de la competencia, la globalización, la dinámica de la economía,
CAPÍTULO III MARCO TEÓRICO 3.1 Introducción Cada día cambian las condiciones de los mercados debido a diferentes factores como: el incremento de la competencia, la globalización, la dinámica de la economía,
LINEAS EQUIPOTENCIALES
 LINEAS EQUIPOTENCIALES Construcción de líneas equipotenciales. Visualización del campo eléctrico y del potencial eléctrico. Análisis del movimiento de cargas eléctricas en presencia de campos eléctricos.
LINEAS EQUIPOTENCIALES Construcción de líneas equipotenciales. Visualización del campo eléctrico y del potencial eléctrico. Análisis del movimiento de cargas eléctricas en presencia de campos eléctricos.
a. Dibujar los paralelogramos completos, señalar los vértices con letras.
 PRACTICO DE VECTORES 1. Dada la siguiente figura, se pide determinar vectores utilizando los vértices. Por ejemplo, el vector, el vector, etcétera. Se pide indicar a. Tres vectores que tengan la misma
PRACTICO DE VECTORES 1. Dada la siguiente figura, se pide determinar vectores utilizando los vértices. Por ejemplo, el vector, el vector, etcétera. Se pide indicar a. Tres vectores que tengan la misma
Cálculo de las Acciones Motoras en Mecánica Analítica
 Cálculo de las Acciones Motoras en Mecánica Analítica 1. Planteamiento general El diseño típico de la motorización de un sistema mecánico S es el que se muestra en la figura 1. Su posición viene definida
Cálculo de las Acciones Motoras en Mecánica Analítica 1. Planteamiento general El diseño típico de la motorización de un sistema mecánico S es el que se muestra en la figura 1. Su posición viene definida
Actividades recreativas para recordar a los vectores. 1) Representa en un eje de coordenadas las siguientes sugerencias:
 Representa en un eje de coordenadas las siguientes sugerencias:") Actividades recreativas para recordar a los vectores 1) Representa en un eje de coordenadas las siguientes sugerencias: a) Dibuja un segmento y oriéntalo en sentido positivo. b) Dibuja un segmento y oriéntalo
Actividades recreativas para recordar a los vectores 1) Representa en un eje de coordenadas las siguientes sugerencias: a) Dibuja un segmento y oriéntalo en sentido positivo. b) Dibuja un segmento y oriéntalo
Disyuntor. Contenido. Dimensionamiento de disyuntor adecuados para inversores bajo influencia de efectos FV específicos
 Disyuntor Dimensionamiento de disyuntor adecuados para inversores bajo influencia de efectos FV específicos Contenido La elección del disyuntor adecuado depende de distintos factores. Precisamente en instalaciones
Disyuntor Dimensionamiento de disyuntor adecuados para inversores bajo influencia de efectos FV específicos Contenido La elección del disyuntor adecuado depende de distintos factores. Precisamente en instalaciones
GRUPO TECNOLOGÍA MECÁNICA PROCESOS DE FABRICACIÒN
 BROCHADORAS Generalidades y Tipos de superficies que generan Se llama brochado a la operación que consiste en arrancar lineal y progresivamente la viruta de una superficie de un cuerpo mediante una sucesión
BROCHADORAS Generalidades y Tipos de superficies que generan Se llama brochado a la operación que consiste en arrancar lineal y progresivamente la viruta de una superficie de un cuerpo mediante una sucesión