Prácticas de Sistemas Digitales y Robótica mediadas por Internet
|
|
|
- María Carmen Cabrera Cruz
- hace 5 años
- Vistas:
Transcripción

1 SUBPROYECTO: Prácticas de Sistemas Digitales y Robótica mediadas por Internet Cecilia García Cena Grupo de Innovación Educativa GSITAE 1
2 RESUMEN Este proyecto propone la creación de herramientas informáticas interactivas en el marco de las nuevas asignaturas de grado de Robótica, Electrónica Digital en el Grado de Ingeniería Electrónica Industrial y Automática y de Microelectrónica del plan antiguo. Se desea desarrollar una plataforma software para el modelado cinemático, la planificación y generación de trayectorias y el control cinemático de robots seriales con hasta 6 grados de libertad.
3 OBJETIVOS INICIALES Motivar al alumno en el desarrollo de prácticas en las asignaturas involucradas, así como la mejora en el rendimiento a la hora de utilizar los recursos del Laboratorio de dichas asignaturas. Explorar las posibilidades de la realización de prácticas a través de MOODLE como apoyo a la enseñanza. Crear herramientas que pueden servir de apoyo a otras asignaturas que precisen realizar sesiones prácticas a través de MOODLE. Desarrollar una herramienta software basada en plataformas software potentes y conocidas por el alumno para la realización de prácticas con robots reales.
4 ACTUACIONES Fases de Ejecución de las líneas de actuación del proyecto Fase 1: Desarrollo del módulo de prueba para las prácticas planteadas. Fase 2: Creación de la infraestructura necesaria para la puesta en marcha de las nuevas prácticas. Fase 3: Incorporación a la docencia en el laboratorio. Fase 4: Análisis de resultados

5 RESULTADOS en el área de Electrónica Desarrollo del laboratorio remoto para las prácticas de lógica programable. El laboratorio está completamente desarrollado. Se espera poder realizar los trabajos de la asignatura Microelectrónica en el presente curso utilizando el laboratorio y el software asociado. Se ha presentado una comunicación al respecto en el Congreso TAEE2012.


6 RESULTADOS en el área de Robótica Laboratorio de Robótica: 6 Robot de 5 DoF Motores sin realimentación. Objetivos: Conexión a la red eléctrica Estudio sobre la posibilidad de colocar potenciómetros para realimentación de posición.
7 RESULTADOS en el área de Robótica Desarrollo de dos plataformas software para la realización de las prácticas de laboratorio: Platforma MCin: permite validar el modelo cinemático de robots de hasta 6 DoF y el modelo cinemático diferencial a través del Jcobiano Geométrico. (Prácticas 1 y 2 de la asignatura) Plataforma Interpola: permite valorar la performance de los interpoladores de trayectorias más comunes de cara a la realización del control de movimiento del extremo operativo del robot. (Práctica 3) Ambas plataformas se desarrollan bajo MatLab y son perfectamente adaptables al entorno Moodle.
8 RESULTADOS Plataforma MCIN Se desarrolló una interfaz de usuario bajo Matlab que permite evaluar el modelo cinemático de un robot serial usando los parámetros de Denavit-Hartenberg. Permite visualizar las coordenadas del efector final, así como los ángulos de Euler asociados; al robot en alambres en las coordenadas indicadas. Muestra las componentes de la matriz Jacobiana, los autovectores Jv1, Jv2 y Jv3, y Jw1, Jw2 y Jw3 en ventanas independientes. Evalúa el índice de Yoshikawa para valorar la manipulabilidad del robot.
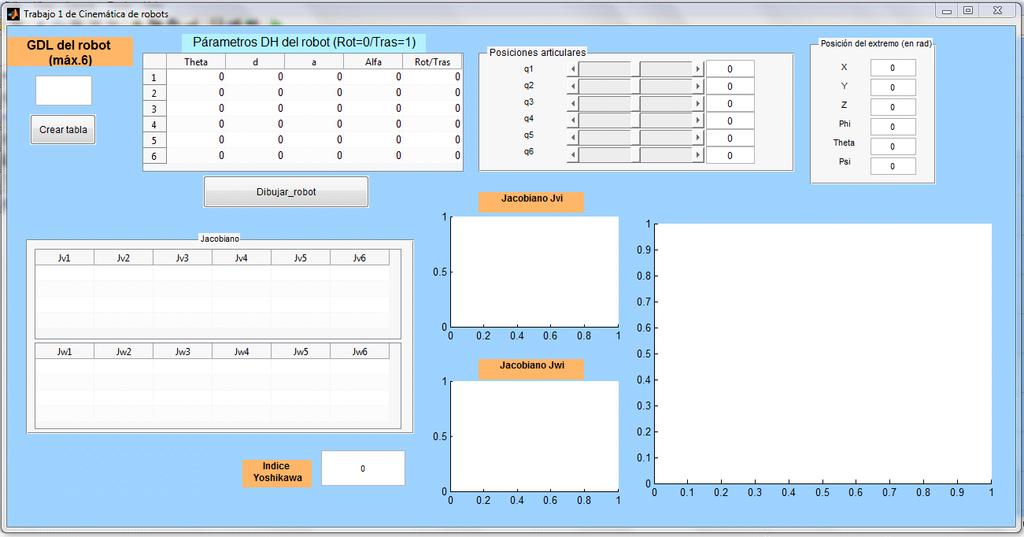
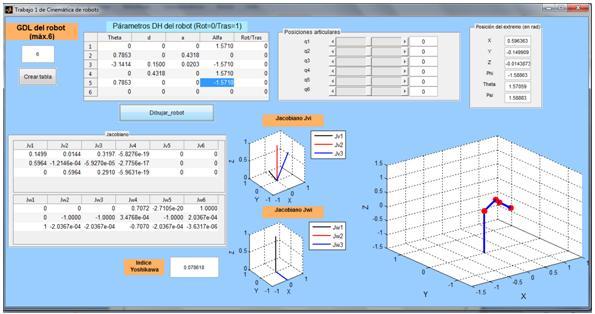
9 RESULTADOS Plataforma MCIN
10 RESULTADOS Plataforma Interpola Permita introducir una orientación inicial y una orientación final deseada del extremo operativo del robot y representa gráficamente la evolución de la rotación según cinco diferentes tipos de interpoladores. La orientación inicial y final pueden especificarse mediante distintas formas: matriz de cosenos directores, ángulos de Euler WUW, ángulos RPY (Row-Pitch-Yaw), cuaternio o par de rotación. La interfaz muestra cinco esferas y el vector de rotación. Durante la ejecución del programa, el vector gira manteniendo su origen y queda visualizada en la esfera la trayectoria seguida. La interfaz también muestra la gráfica de la velocidad lineal del punto sobre la esfera.
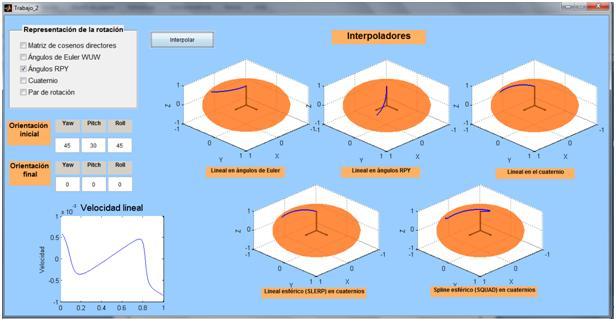
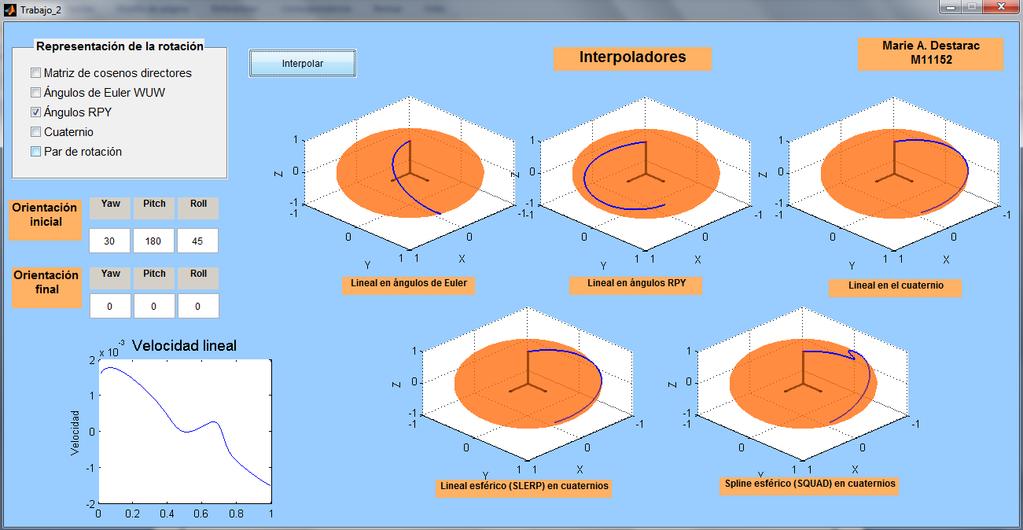
11 RESULTADOS
12 DIFICULTADES Falta de recursos económicos en el apartado de fungible. Falta de reconocimiento como actividad de investigación. Los alumnos colaboradores del proyecto desconocen las técnicas y herramientas disponibles para la recreación de entornos 3D, por lo que han tenido un periodo de aprendizaje muy largo. Estos proyectos son de duración superior al año.
ANX-PR/CL/ GUÍA DE APRENDIZAJE
 PROCESO DE COORDINACIÓN DE LAS ENSEÑANZAS PR/CL/001 ASIGNATURA 53001152 - PLAN DE ESTUDIOS 05AY - CURSO ACADÉMICO Y SEMESTRE 2017-18 - Primer semestre Índice Guía de Aprendizaje 1. Datos descriptivos...1
PROCESO DE COORDINACIÓN DE LAS ENSEÑANZAS PR/CL/001 ASIGNATURA 53001152 - PLAN DE ESTUDIOS 05AY - CURSO ACADÉMICO Y SEMESTRE 2017-18 - Primer semestre Índice Guía de Aprendizaje 1. Datos descriptivos...1
PRÓLOGO PREFACIO... 21
 ÍNDICE PRÓLOGO... 17 PREFACIO... 21 CAPÍTULO 1. ENTORNO ACTUAL Y PERSPECTIVAS... 27 1.1 ORGANIZACIÓN DE UN SISTEMA ROBÓTICO... 29 1.2 ENTORNOS MATLAB Y SIMULINK... 31 1.3 TENDENCIAS EN ROBÓTICA Y MECATRÓNICA...
ÍNDICE PRÓLOGO... 17 PREFACIO... 21 CAPÍTULO 1. ENTORNO ACTUAL Y PERSPECTIVAS... 27 1.1 ORGANIZACIÓN DE UN SISTEMA ROBÓTICO... 29 1.2 ENTORNOS MATLAB Y SIMULINK... 31 1.3 TENDENCIAS EN ROBÓTICA Y MECATRÓNICA...
Jornada Sage/Python. 15 de Julio Experiencia docente en "Control y programación de robots" utilizando Sage
 Experiencia docente en "Control y programación de robots" utilizando Sage Jornada Sage/Python 15 de Julio 2010 Profesor: Carlos Elvira Izurategui Área de Ingeniería de Sistemas y Automática Universidad
Experiencia docente en "Control y programación de robots" utilizando Sage Jornada Sage/Python 15 de Julio 2010 Profesor: Carlos Elvira Izurategui Área de Ingeniería de Sistemas y Automática Universidad
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES
 INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE CINEMATICA DE ROBOTS PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno obtendrá el modelo cinemático de manipuladores,
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE CINEMATICA DE ROBOTS PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno obtendrá el modelo cinemático de manipuladores,
Contenido. Prefacio... Acerca de los autores...
 Contenido Prefacio... Acerca de los autores... xi xvi Capítulo 1. Introducción... 1 1.1. Antecedentes históricos... 2 1.2. Origen y desarrollo de la robótica... 8 1.3. Definición del Robot... 16 1.3.1.
Contenido Prefacio... Acerca de los autores... xi xvi Capítulo 1. Introducción... 1 1.1. Antecedentes históricos... 2 1.2. Origen y desarrollo de la robótica... 8 1.3. Definición del Robot... 16 1.3.1.
2015, Año del Generalísimo José María Morelos y Pavón
 Nombre de la Asignatura: ROBOTICA Línea de Investigación o Trabajo: PROCESAMIENTO DE SEÑALES ELECTRICAS Y ELECTRONICAS Tiempo de dedicación del estudiante a las actividades de: DOC-TIS-TPS-CRÉDITOS 48
Nombre de la Asignatura: ROBOTICA Línea de Investigación o Trabajo: PROCESAMIENTO DE SEÑALES ELECTRICAS Y ELECTRONICAS Tiempo de dedicación del estudiante a las actividades de: DOC-TIS-TPS-CRÉDITOS 48
Fundamentos de Robótica
 Fundamentos de Robótica Cinemática Directa Ricardo-Franco Mendoza-Garcia rmendozag@uta.cl Escuela Universitaria de Ingeniería Mecánica Universidad de Tarapacá Arica, Chile July 9, 2014 R. F. Mendoza-Garcia
Fundamentos de Robótica Cinemática Directa Ricardo-Franco Mendoza-Garcia rmendozag@uta.cl Escuela Universitaria de Ingeniería Mecánica Universidad de Tarapacá Arica, Chile July 9, 2014 R. F. Mendoza-Garcia
Capacitación Tecnológica Científica para Bolivia. Introducción al modelado de robots
 Catecbol Capacitación Tecnológica Científica para Bolivia www.catecbol.com facebook.com/catecbol @catecbol catecbol@gmail.com Introducción al modelado de robots Ronald Terrazas Mallea Bélgica La unión
Catecbol Capacitación Tecnológica Científica para Bolivia www.catecbol.com facebook.com/catecbol @catecbol catecbol@gmail.com Introducción al modelado de robots Ronald Terrazas Mallea Bélgica La unión
Universidad Autónoma de San Luis Potosí Facultad de Ingeniería Programas Analíticos del Área Mecánica y Eléctrica
 A) CURSO Clave Asignatura 5719 Robótica A Horas de teoría Horas de práctica Horas trabajo Créditos Horas por semana por semana adicional estudiante Totales 4 2 4 10 64 B) DATOS BÁSICOS DEL CURSO IEA IM
A) CURSO Clave Asignatura 5719 Robótica A Horas de teoría Horas de práctica Horas trabajo Créditos Horas por semana por semana adicional estudiante Totales 4 2 4 10 64 B) DATOS BÁSICOS DEL CURSO IEA IM
Robótica humanoide. Los. Miguel González-Fierro
 Robótica humanoide. Los robots HOAP-3 y RH-2 Miguel González-Fierro Índice Por qué robots humanoides? Algunos robots humanoides Robots humanoides en la UC3M Control de robots humanoides Cinemática Dinámica
Robótica humanoide. Los robots HOAP-3 y RH-2 Miguel González-Fierro Índice Por qué robots humanoides? Algunos robots humanoides Robots humanoides en la UC3M Control de robots humanoides Cinemática Dinámica
ANX-PR/CL/ GUÍA DE APRENDIZAJE
 PROCESO DE COORDINACIÓN DE LAS ENSEÑANZAS PR/CL/001 ASIGNATURA 53001561 - PLAN DE ESTUDIOS 05BH - CURSO ACADÉMICO Y SEMESTRE 2017/18 - Primer semestre Índice Guía de Aprendizaje 1. Datos descriptivos...1
PROCESO DE COORDINACIÓN DE LAS ENSEÑANZAS PR/CL/001 ASIGNATURA 53001561 - PLAN DE ESTUDIOS 05BH - CURSO ACADÉMICO Y SEMESTRE 2017/18 - Primer semestre Índice Guía de Aprendizaje 1. Datos descriptivos...1
1176 Robótica Tecnología de la Automatización I 3082 Control y Programación de Robots Automática, Ingeniería
 1176 Robótica - 1986 Tecnología de la Automatización I 3082 Control y Programación de Robots Automática, Ingeniería Departamento electrónica e Informática Teléfono 913363061 industrial Unidad Docente Automática
1176 Robótica - 1986 Tecnología de la Automatización I 3082 Control y Programación de Robots Automática, Ingeniería Departamento electrónica e Informática Teléfono 913363061 industrial Unidad Docente Automática
UNEDLabs: Una nueva red de Laboratorios Colaborativos, Virtuales y Remotos
 UNEDLabs: Una nueva red de Laboratorios Colaborativos, Virtuales y Remotos Oscar Reinoso Departamento de Ingeniería de Sistemas y Automática Grupo de Automatización, Robótica y Visión por Computador (ARVC)
UNEDLabs: Una nueva red de Laboratorios Colaborativos, Virtuales y Remotos Oscar Reinoso Departamento de Ingeniería de Sistemas y Automática Grupo de Automatización, Robótica y Visión por Computador (ARVC)
TECNOLÓGICO DE ESTUDIOS SUPERIORES DE ECATEPEC DIVISIÓN DE INGENIERÍA ELECTRÓNICA Y TELEMÁTICA PRÁCTICAS DE LABORATORIO
 TECNOLÓGICO DE ESTUDIOS SUPERIORES DE ECATEPEC DIVISIÓN DE INGENIERÍA ELECTRÓNICA Y TELEMÁTICA Comité evaluador: Juan Carlos Castillo Miranda Eva Valdez Alemán Gerardo Pazos Rodríguez PRÁCTICAS DE LABORATORIO
TECNOLÓGICO DE ESTUDIOS SUPERIORES DE ECATEPEC DIVISIÓN DE INGENIERÍA ELECTRÓNICA Y TELEMÁTICA Comité evaluador: Juan Carlos Castillo Miranda Eva Valdez Alemán Gerardo Pazos Rodríguez PRÁCTICAS DE LABORATORIO
PLAN DE ESTUDIOS 2008-II SÍLABO
 UNIVERSIDAD RICARDO PALMA FACULTAD DE INGENIERÍA I. INFORMACIÓN GENERAL: DEPARTAMENTO ACADÉMICO DE INGENIERÍA PLAN DE ESTUDIOS 2008-II SÍLABO 1.1 Asignatura : ROBÓTICA 1.2. Ciclo : VIII 1.3 Carrera Profesional
UNIVERSIDAD RICARDO PALMA FACULTAD DE INGENIERÍA I. INFORMACIÓN GENERAL: DEPARTAMENTO ACADÉMICO DE INGENIERÍA PLAN DE ESTUDIOS 2008-II SÍLABO 1.1 Asignatura : ROBÓTICA 1.2. Ciclo : VIII 1.3 Carrera Profesional
PROGRAMA DE LA ASIGNATURA: Control y programación de robots. Código: Curso 2006/2007
 PROGRAMA DE LA ASIGNATURA: Control y programación de robots Código: 3042104010 Curso 2006/2007 CENTRO: ESCUELA TÉCNICA SUPERIOR DE INGENIEROS INDUSTRIALES TITULACIÓN: INGENIERÍA AUTOMÁTICA Y ELECTRÓNICA
PROGRAMA DE LA ASIGNATURA: Control y programación de robots Código: 3042104010 Curso 2006/2007 CENTRO: ESCUELA TÉCNICA SUPERIOR DE INGENIEROS INDUSTRIALES TITULACIÓN: INGENIERÍA AUTOMÁTICA Y ELECTRÓNICA
ANX-PR/CL/ GUÍA DE APRENDIZAJE
 PROCESO DE COORDINACIÓN DE LAS ENSEÑANZAS PR/CL/001 ASIGNATURA 53001561 - PLAN DE ESTUDIOS 05BH - CURSO ACADÉMICO Y SEMESTRE 2018/19 - Primer semestre Índice Guía de Aprendizaje 1. Datos descriptivos...1
PROCESO DE COORDINACIÓN DE LAS ENSEÑANZAS PR/CL/001 ASIGNATURA 53001561 - PLAN DE ESTUDIOS 05BH - CURSO ACADÉMICO Y SEMESTRE 2018/19 - Primer semestre Índice Guía de Aprendizaje 1. Datos descriptivos...1
UNIVERSIDAD AUTÓNOMA DEL ESTADO DE HIDALGO
 UNIVERSIDAD AUTÓNOMA DEL ESTADO DE HIDALGO UBICACIÓN DIVISIÓN DE DOCENCIA DIRECCIÓN DE PLANEACIÓN Y DESARROLLO EDUCATIVO PROGRAMA DE ESTUDIO LICENCIATURA EN: SISTEMAS COMPUTACIONALES (Nombre completo)
UNIVERSIDAD AUTÓNOMA DEL ESTADO DE HIDALGO UBICACIÓN DIVISIÓN DE DOCENCIA DIRECCIÓN DE PLANEACIÓN Y DESARROLLO EDUCATIVO PROGRAMA DE ESTUDIO LICENCIATURA EN: SISTEMAS COMPUTACIONALES (Nombre completo)
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES
 INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE DINÁMICA DE ROBOTS PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno determinará el modelo dinámico de manipuladores de
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE DINÁMICA DE ROBOTS PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno determinará el modelo dinámico de manipuladores de
Docencia en automática y robótica del área de Ingeniería de Sistemas y Automática de la Universidad de Almería
 Jornadas de trabajo DOCENWEB Alicante 2003 Docencia en automática y robótica del área de ngeniería de Sistemas y Automática de la Universidad de Almería Manolo Berenguel, José Luis Guzmán Francisco Rodríguez,
Jornadas de trabajo DOCENWEB Alicante 2003 Docencia en automática y robótica del área de ngeniería de Sistemas y Automática de la Universidad de Almería Manolo Berenguel, José Luis Guzmán Francisco Rodríguez,
[ROBÓTICA ARTICULAR]
![[ROBÓTICA ARTICULAR]](/thumbs/65/52906152.jpg "[ROBÓTICA ARTICULAR]") Trabajo de curso de la asignatura Automatización y Robótica Industriales [ROBÓTICA ARTICULAR] Introducción 2º curso de Ingeniería en Automática y Electrónica Curso 2007/08 El objetivo de este trabajo de
Trabajo de curso de la asignatura Automatización y Robótica Industriales [ROBÓTICA ARTICULAR] Introducción 2º curso de Ingeniería en Automática y Electrónica Curso 2007/08 El objetivo de este trabajo de
MCD-1706 SATCA 1 : Carrera:
 1. Datos Generales de la asignatura Nombre de la asignatura: Robótica Industrial Clave de la asignatura: MCD-1706 SATCA 1 : 2-3-5 Carrera: Ingeniería electrónica 2. Presentación Caracterización de la asignatura
1. Datos Generales de la asignatura Nombre de la asignatura: Robótica Industrial Clave de la asignatura: MCD-1706 SATCA 1 : 2-3-5 Carrera: Ingeniería electrónica 2. Presentación Caracterización de la asignatura
Robótica I ACB Participantes Comité para el Diseño de Especialidad de la DIET. Academia de Sistemas Digitales de la DIET
 1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica I Ingeniería Electrónica ACB - 0802 4 0 8 2. HISTORIA DEL PROGRAMA. Lugar
1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica I Ingeniería Electrónica ACB - 0802 4 0 8 2. HISTORIA DEL PROGRAMA. Lugar
CONTENIDOS DOCENTES DE AUTOMÁTICA EN LA UNIVERSIDAD MIGUEL HERNÁNDEZ
 DE AUTOMÁTICA EN LA UNIVERSIDAD MIGUEL HERNÁNDEZ UNIVERSIDAD MIGUEL HERNÁNDEZ MATERIAS A TRATAR Regulación Automática Robótica Automatización Industrial TITULACIONES Ingeniero Industrial Ingeniero de Telecomunicación
DE AUTOMÁTICA EN LA UNIVERSIDAD MIGUEL HERNÁNDEZ UNIVERSIDAD MIGUEL HERNÁNDEZ MATERIAS A TRATAR Regulación Automática Robótica Automatización Industrial TITULACIONES Ingeniero Industrial Ingeniero de Telecomunicación
Cinemática del Robot. UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides
 UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. Se interesa por la
UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. Se interesa por la
Fundamentos de Robótica
 Fundamentos de Robótica Cinemática Inversa Ricardo-Franco Mendoza-Garcia rmendozag@uta.cl Escuela Universitaria de Ingeniería Mecánica Universidad de Tarapacá Arica, Chile June 16, 2015 R. F. Mendoza-Garcia
Fundamentos de Robótica Cinemática Inversa Ricardo-Franco Mendoza-Garcia rmendozag@uta.cl Escuela Universitaria de Ingeniería Mecánica Universidad de Tarapacá Arica, Chile June 16, 2015 R. F. Mendoza-Garcia
PROGRAMA ANALÌTICO 2. OBJETIVOS DE LA ASIGNATURA
 PROGRAMA ANALÌTICO 1. CARACTERIZACIÓN DE LA ASIGNATURA En el presente curso se describen las principales configuraciones geométricas de los robots manipuladores, los diferentes nodos en el proceso de manipulación
PROGRAMA ANALÌTICO 1. CARACTERIZACIÓN DE LA ASIGNATURA En el presente curso se describen las principales configuraciones geométricas de los robots manipuladores, los diferentes nodos en el proceso de manipulación
Robótica I ACF Participantes Comité para el Diseño de Especialidad de la DIET. Academia de Sistemas Digitales de la DIET
 1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica II Ingeniería Electrónica ACF - 080 2 8 2. HISTORIA DEL PROGRAMA. Lugar
1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica II Ingeniería Electrónica ACF - 080 2 8 2. HISTORIA DEL PROGRAMA. Lugar
Universidad Surcolombiana NIT FACULTAD DE INGENIERÍA PROGRAMA DE INGENIERÍA ELECTRÓNICA
 Página de 8 FORMATO OFICIAL DE MICRODISEÑO CURRICULAR FACULTAD: INGENIERÍA PROGRAMA: INGENIERÍA ELECTRÓNICA. IDENTIFICACIÓN DEL CURSO Nombre del Curso Código ROBÓTICA Número de Créditos Académicos 3 Horas
Página de 8 FORMATO OFICIAL DE MICRODISEÑO CURRICULAR FACULTAD: INGENIERÍA PROGRAMA: INGENIERÍA ELECTRÓNICA. IDENTIFICACIÓN DEL CURSO Nombre del Curso Código ROBÓTICA Número de Créditos Académicos 3 Horas
ANX-PR/CL/ GUÍA DE APRENDIZAJE. ASIGNATURA Robotica. CURSO ACADÉMICO - SEMESTRE Segundo semestre
 ANX-PR/CL/001-01 GUÍA DE APRENDIZAJE ASIGNATURA Robotica CURSO ACADÉMICO - SEMESTRE 2016-17 - Segundo semestre GA_56IA_565000164_2S_2016-17 Datos Descriptivos Nombre de la Asignatura Titulación Centro
ANX-PR/CL/001-01 GUÍA DE APRENDIZAJE ASIGNATURA Robotica CURSO ACADÉMICO - SEMESTRE 2016-17 - Segundo semestre GA_56IA_565000164_2S_2016-17 Datos Descriptivos Nombre de la Asignatura Titulación Centro
ANX-PR/CL/ GUÍA DE APRENDIZAJE. ASIGNATURA Robotica. CURSO ACADÉMICO - SEMESTRE Primer semestre
 ANX-PR/CL/001-02 GUÍA DE APRENDIZAJE ASIGNATURA Robotica CURSO ACADÉMICO - SEMESTRE 2015-16 - Primer semestre GA_05TI_55000105_1S_2015-16 Datos Descriptivos Nombre de la Asignatura Titulación Centro responsable
ANX-PR/CL/001-02 GUÍA DE APRENDIZAJE ASIGNATURA Robotica CURSO ACADÉMICO - SEMESTRE 2015-16 - Primer semestre GA_05TI_55000105_1S_2015-16 Datos Descriptivos Nombre de la Asignatura Titulación Centro responsable
PROYECTO DOCENTE ASIGNATURA: "Control y Programación de Robots" Grupo: Grupo 1(882067) Titulacion: INGENIERO INDUSTRIAL (Plan 98) Curso:
 Titulacion: INGENIERO INDUSTRIAL (Plan 98) Curso:") PROYECTO DOCENTE ASIGNATURA: "Control y Programación de Robots" Grupo: Grupo 1(882067) Titulacion: INGENIERO INDUSTRIAL (Plan 98) Curso: 2013-2014 DATOS BÁSICOS DE LA ASIGNATURA/GRUPO Titulación: Año del
PROYECTO DOCENTE ASIGNATURA: "Control y Programación de Robots" Grupo: Grupo 1(882067) Titulacion: INGENIERO INDUSTRIAL (Plan 98) Curso: 2013-2014 DATOS BÁSICOS DE LA ASIGNATURA/GRUPO Titulación: Año del
Los objetivos fundamentales de la asignatura son:
 Asignatura: CONTROL Y PROGRAMACIÓN DE ROBOTS Código: 40007305 Año académico: 2011/2012 Centro: ESCUELA POLITÉCNICA SUPERIOR Departamento: LENGUAJES Y COMPUTACIÓN Área: INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
Asignatura: CONTROL Y PROGRAMACIÓN DE ROBOTS Código: 40007305 Año académico: 2011/2012 Centro: ESCUELA POLITÉCNICA SUPERIOR Departamento: LENGUAJES Y COMPUTACIÓN Área: INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
DATOS BÁSICOS DE LA MATERIA
 EXPERIENCIA PILOTO DE CRÉDITOS EUROPEOS. UNIVERSIDADES ANDALUZAS GUÍA DOCENTE PARTICULAR DE INGENIERO EN AUTOMÁTICA Y ELECTRÓNICA INDUSTRIAL FICHA DE MATERIAS DATOS BÁSICOS DE LA MATERIA NOMBRE: CONTROL
EXPERIENCIA PILOTO DE CRÉDITOS EUROPEOS. UNIVERSIDADES ANDALUZAS GUÍA DOCENTE PARTICULAR DE INGENIERO EN AUTOMÁTICA Y ELECTRÓNICA INDUSTRIAL FICHA DE MATERIAS DATOS BÁSICOS DE LA MATERIA NOMBRE: CONTROL
CURSO ACADÉMICO 2008/2009
 DATOS BÁSICOS DE LA ASIGNATURA CURSO ACADÉMICO 2008/2009 Escuela Técnica Superior de Ingeniería Informática Dep. Ingeniería de Sistemas y Automática Robótica Titulación: INGENIERO EN INFORMÁTICA ( Plan
DATOS BÁSICOS DE LA ASIGNATURA CURSO ACADÉMICO 2008/2009 Escuela Técnica Superior de Ingeniería Informática Dep. Ingeniería de Sistemas y Automática Robótica Titulación: INGENIERO EN INFORMÁTICA ( Plan
CINEMÁTICA DEL ROBOT
 CINEMÁTICA DEL ROBOT Cinemática Directa Cinemática Inversa Matriz Jacobiana 1 Problema cinemático del robot Cinemática del robot: Estudio de su movimiento con respecto a un sistema de referencia: Descripción
CINEMÁTICA DEL ROBOT Cinemática Directa Cinemática Inversa Matriz Jacobiana 1 Problema cinemático del robot Cinemática del robot: Estudio de su movimiento con respecto a un sistema de referencia: Descripción
en la asignatura de Robots en la U.R. Autor: Carlos Elvira Izurrategui
 Experiencia docente en la asignatura de Control y Programación de Robots en la U.R. Autor: Carlos Elvira Izurrategui Titulaciones Ingeniería Técnica Industrial en Electricidad. Ingeniería Técnica Industrial
Experiencia docente en la asignatura de Control y Programación de Robots en la U.R. Autor: Carlos Elvira Izurrategui Titulaciones Ingeniería Técnica Industrial en Electricidad. Ingeniería Técnica Industrial
Cinemática del Robot
 Cinemática del Robot La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. En primer término, la cinemática se interesa por la descripción analítica del movimiento
Cinemática del Robot La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. En primer término, la cinemática se interesa por la descripción analítica del movimiento
UNIVERSIDAD DE SONORA Unidad Regional Centro División de Ingeniería. Departamento de Servicio: Ingeniería Industrial
 UNIVERSIDAD DE SONORA Unidad Regional Centro División de Ingeniería Departamento de Ingeniería Industrial LICENCIATURA INGENIERÍA EN MECATRÓNICA Nombre de la Asignatura: FUNDAMENTOS DE ROBÓTICA Clave:
UNIVERSIDAD DE SONORA Unidad Regional Centro División de Ingeniería Departamento de Ingeniería Industrial LICENCIATURA INGENIERÍA EN MECATRÓNICA Nombre de la Asignatura: FUNDAMENTOS DE ROBÓTICA Clave:
UNIVERSIDAD RICARDO PALMA FACULTAD DE INGENIERÍA ESCUELA ACADÉMICO PROFESIONAL DE INGENIERÍA ELECTRÓNICA SÍLABO PLAN DE ESTUDIOS 2006-II
 UNIVERSIDAD RICARDO PALMA FACULTAD DE INGENIERÍA ESCUELA ACADÉMICO PROFESIONAL DE INGENIERÍA ELECTRÓNICA SÍLABO PLAN DE ESTUDIOS 2006-II I. DATOS GENERALES Asignatura : Sistemas Expertos y Robótica Área
UNIVERSIDAD RICARDO PALMA FACULTAD DE INGENIERÍA ESCUELA ACADÉMICO PROFESIONAL DE INGENIERÍA ELECTRÓNICA SÍLABO PLAN DE ESTUDIOS 2006-II I. DATOS GENERALES Asignatura : Sistemas Expertos y Robótica Área
UNIVERSIDAD POLITÉCNICA. TEMA: Cinemática Diferencial. E.T.S.I. y Diseño Industrial. Titulación: Grado en Ingeniería Electrónica y Automática
 10/05/2017 UNIVERSIDAD POLITÉCNICA DE MADRID TEMA: Cinemática Diferencial Profesor: Miguel Hernando Gutiérrez & Cecilia García Cena E.T.S.I. y Diseño Industrial Titulación: Grado en Ingeniería Electrónica
10/05/2017 UNIVERSIDAD POLITÉCNICA DE MADRID TEMA: Cinemática Diferencial Profesor: Miguel Hernando Gutiérrez & Cecilia García Cena E.T.S.I. y Diseño Industrial Titulación: Grado en Ingeniería Electrónica
INGENIERÍA PROFESIONAL EN INOCUIDAD ALIMENTARIA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ROBÓTICA
 INGENIERÍA PROFESIONAL EN INOCUIDAD ALIMENTARIA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ROBÓTICA UNIDADES DE APRENDIZAJE 1. Competencias Automatizar procesos de producción mediante la implementación
INGENIERÍA PROFESIONAL EN INOCUIDAD ALIMENTARIA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ROBÓTICA UNIDADES DE APRENDIZAJE 1. Competencias Automatizar procesos de producción mediante la implementación
SÍLABO DE ROBÓTICA Y SISTEMAS EXPERTOS
 UNIVERSIDAD NACIONAL JOSÉ FAUSTINO SÁNCHEZ CARRIÓN FACULTAD DE INGENIERIA INDUSTRIAL, SISTEMAS E INFORMATICA E. P. DE INGENIERIA ELECTRONICA SÍLABO DE ROBÓTICA Y SISTEMAS EXPERTOS I. DATOS GENERALES CÓDIGO
UNIVERSIDAD NACIONAL JOSÉ FAUSTINO SÁNCHEZ CARRIÓN FACULTAD DE INGENIERIA INDUSTRIAL, SISTEMAS E INFORMATICA E. P. DE INGENIERIA ELECTRONICA SÍLABO DE ROBÓTICA Y SISTEMAS EXPERTOS I. DATOS GENERALES CÓDIGO
Control de Robots Manipuladores
 NOMBRE DE LA ASIGNATURA: BENEMÉRITA UNIVERSIDAD AUTÓNOMA DE PUEBLA FACULTAD DE CIENCIAS DE LA ELECTRÓNICA PROGRAMA DE ESTUDIOS DE LA MAESTRÍA EN CIENCIAS DE LA ELECTRÓNICA CON OPCIÓN EN AUTOMATIZACIÓN
NOMBRE DE LA ASIGNATURA: BENEMÉRITA UNIVERSIDAD AUTÓNOMA DE PUEBLA FACULTAD DE CIENCIAS DE LA ELECTRÓNICA PROGRAMA DE ESTUDIOS DE LA MAESTRÍA EN CIENCIAS DE LA ELECTRÓNICA CON OPCIÓN EN AUTOMATIZACIÓN
SIMULADOR DE COMPORTAMIENTO CINEMÁTICO DE ROBOTS MANIPULADORES UTILIZANDO MATLAB
 SIMULADOR DE COMPORTAMIENTO CINEMÁTICO DE ROBOTS MANIPULADORES UTILIZANDO MATLAB Enrique Cuan Duron a, Arnoldo Fernández Ramírez b, Elisa Urquizo Barraza a, Roxana García Andrade b,a División de Estudios
SIMULADOR DE COMPORTAMIENTO CINEMÁTICO DE ROBOTS MANIPULADORES UTILIZANDO MATLAB Enrique Cuan Duron a, Arnoldo Fernández Ramírez b, Elisa Urquizo Barraza a, Roxana García Andrade b,a División de Estudios
Robótica PLANIFICACIONES Actualización: 2ºC/2018. Planificaciones Robótica. Docente responsable: GONZALEZ PABLO SEBASTIAN.
 Planificaciones 6632 - Robótica Docente responsable: GONZALEZ PABLO SEBASTIAN 1 de 6 OBJETIVOS a) Definir y analizar las características que diferencian a los Robots de otras máquinas automáticas. b) Estudiar
Planificaciones 6632 - Robótica Docente responsable: GONZALEZ PABLO SEBASTIAN 1 de 6 OBJETIVOS a) Definir y analizar las características que diferencian a los Robots de otras máquinas automáticas. b) Estudiar
ANX-PR/CL/ GUÍA DE APRENDIZAJE
 PROCESO DE COORDINACIÓN DE LAS ENSEÑANZAS PR/CL/001 ASIGNATURA 55000105 - PLAN DE ESTUDIOS 05TI - Grado En Ingenieria En Tecnologias CURSO ACADÉMICO Y SEMESTRE 2018/19 - Primer semestre Índice Guía de
PROCESO DE COORDINACIÓN DE LAS ENSEÑANZAS PR/CL/001 ASIGNATURA 55000105 - PLAN DE ESTUDIOS 05TI - Grado En Ingenieria En Tecnologias CURSO ACADÉMICO Y SEMESTRE 2018/19 - Primer semestre Índice Guía de
Fundamentos de Robótica
 Fundamentos de Robótica Introducción a la cinemática de manipuladores hamontesv@uaemex.mx http://scfi.uaemex.mx/hamontes 1 Recomendación No use estas diapositivas como referencia única de estudio durante
Fundamentos de Robótica Introducción a la cinemática de manipuladores hamontesv@uaemex.mx http://scfi.uaemex.mx/hamontes 1 Recomendación No use estas diapositivas como referencia única de estudio durante
ANX-PR/CL/ GUÍA DE APRENDIZAJE. ASIGNATURA Robots paralelos. CURSO ACADÉMICO - SEMESTRE Segundo semestre
 ANX-PR/CL/001-02 GUÍA DE APRENDIZAJE ASIGNATURA Robots paralelos CURSO ACADÉMICO - SEMESTRE 2015-16 - Segundo semestre GA_05AY_53001163_2S_2015-16 Datos Descriptivos Nombre de la Asignatura Titulación
ANX-PR/CL/001-02 GUÍA DE APRENDIZAJE ASIGNATURA Robots paralelos CURSO ACADÉMICO - SEMESTRE 2015-16 - Segundo semestre GA_05AY_53001163_2S_2015-16 Datos Descriptivos Nombre de la Asignatura Titulación
ANX-PR/CL/ GUÍA DE APRENDIZAJE
 PROCESO DE COORDINACIÓN DE LAS ENSEÑANZAS PR/CL/001 ASIGNATURA 55000105 - PLAN DE ESTUDIOS 05TI - Grado en Ingenieria en Tecnologias CURSO ACADÉMICO Y SEMESTRE 2017-18 - Primer semestre Índice Guía de
PROCESO DE COORDINACIÓN DE LAS ENSEÑANZAS PR/CL/001 ASIGNATURA 55000105 - PLAN DE ESTUDIOS 05TI - Grado en Ingenieria en Tecnologias CURSO ACADÉMICO Y SEMESTRE 2017-18 - Primer semestre Índice Guía de
ANX-PR/CL/ GUÍA DE APRENDIZAJE. ASIGNATURA Robotica. CURSO ACADÉMICO - SEMESTRE Primer semestre
 ANX-PR/CL/001-01 GUÍA DE APRENDIZAJE ASIGNATURA Robotica CURSO ACADÉMICO - SEMESTRE 2016-17 - Primer semestre GA_05TI_55000105_1S_2016-17 Datos Descriptivos Nombre de la Asignatura Titulación Centro responsable
ANX-PR/CL/001-01 GUÍA DE APRENDIZAJE ASIGNATURA Robotica CURSO ACADÉMICO - SEMESTRE 2016-17 - Primer semestre GA_05TI_55000105_1S_2016-17 Datos Descriptivos Nombre de la Asignatura Titulación Centro responsable
Control y programación de robots
 Control y programación de robots 11. Solución cinemática inversa y directa de robots seriales 11.1 El alumno, tras recibir y estudiar esta clase, debe ser capaz de: Comprender el modelado de la cinemática
Control y programación de robots 11. Solución cinemática inversa y directa de robots seriales 11.1 El alumno, tras recibir y estudiar esta clase, debe ser capaz de: Comprender el modelado de la cinemática
Análisis de Plataforma Sewart utilizando SimMechanics Aplicada al Desarrollo de Simuladores de Vuelo.
 Análisis de Plataforma Sewart utilizando SimMechanics Aplicada al Desarrollo de Simuladores de Vuelo. Griselda I. Cistac [1] -Aníbal Zanini [2] - Horacio Abbate [3] Facultad de Ingeniería-UNLPam [1] -
Análisis de Plataforma Sewart utilizando SimMechanics Aplicada al Desarrollo de Simuladores de Vuelo. Griselda I. Cistac [1] -Aníbal Zanini [2] - Horacio Abbate [3] Facultad de Ingeniería-UNLPam [1] -
Percepción visual aplicada a la robótica
 Percepción visual aplicada a la robótica Mario I. Chacón Murguía Rafael Sandoval Rodríguez Javier Vega Pineda Selecciona el libro para empezar Capítulo 2 Teoría de robótica Continuar Cinemática de robots
Percepción visual aplicada a la robótica Mario I. Chacón Murguía Rafael Sandoval Rodríguez Javier Vega Pineda Selecciona el libro para empezar Capítulo 2 Teoría de robótica Continuar Cinemática de robots
DESCRIPCIÓN DE LA ASIGNATURA
 DESCRIPCIÓN DE LA ASIGNATURA ASIGNATURA: Nombre en Inglés: ROBOTICS Código UPM: 565000164 MATERIA: CRÉDITOS ECTS: 4,5 CARÁCTER: MATERIA DE TECNOLOGÍA ESPECÍFICA IMPARTIDA EN LA EUITI TITULACIÓN: GRADUADO
DESCRIPCIÓN DE LA ASIGNATURA ASIGNATURA: Nombre en Inglés: ROBOTICS Código UPM: 565000164 MATERIA: CRÉDITOS ECTS: 4,5 CARÁCTER: MATERIA DE TECNOLOGÍA ESPECÍFICA IMPARTIDA EN LA EUITI TITULACIÓN: GRADUADO
CINEMÁTICA Y DINÁMICA DE ROBOTS MANIPULADORES: RESPUESTAS DE EJERCICIOS UNIDAD 03. Roger Miranda Colorado
 CINEMÁTICA Y DINÁMICA DE ROBOTS MANIPULADORES: RESPUESTAS DE EJERCICIOS UNIDAD 03 Roger Miranda Colorado 23 de mayo de 2016 Índice 1. RESPUESTAS DE EJERCICIOS UNIDAD 03 1 1. RESPUESTAS DE EJERCICIOS UNIDAD
CINEMÁTICA Y DINÁMICA DE ROBOTS MANIPULADORES: RESPUESTAS DE EJERCICIOS UNIDAD 03 Roger Miranda Colorado 23 de mayo de 2016 Índice 1. RESPUESTAS DE EJERCICIOS UNIDAD 03 1 1. RESPUESTAS DE EJERCICIOS UNIDAD
TSTC. Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 2 CINEMÁTICA DE MANIPULADORES
 Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 2 CINEMÁTICA DE MANIPULADORES Secciones 1. Introducción. 2. Coordenadas y Transformaciones Homogéneas. 3. Problema Cinemático Directo. Método de
Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 2 CINEMÁTICA DE MANIPULADORES Secciones 1. Introducción. 2. Coordenadas y Transformaciones Homogéneas. 3. Problema Cinemático Directo. Método de
INSTITUTO TECNOLÓGICO DE VERACRUZ ANTORCHA Y LUZ DE FUEGO PERMANENTE
 INSTITUTO TECNOLÓGICO DE VERACRUZ ANTORCHA Y LUZ DE FUEGO PERMANENTE INGENIERIA MECATRONICA INGENIERIA MECATRONICA REPRESENTACION DE DENAVIT-HARTENBERG CADENAS CINEMATICAS CNIEMATICA DIRECTA CATEDRATICO:
INSTITUTO TECNOLÓGICO DE VERACRUZ ANTORCHA Y LUZ DE FUEGO PERMANENTE INGENIERIA MECATRONICA INGENIERIA MECATRONICA REPRESENTACION DE DENAVIT-HARTENBERG CADENAS CINEMATICAS CNIEMATICA DIRECTA CATEDRATICO:
Acuerdo de Junta de Facultad de Ciencias, sesión ordinaria 14 de junio de 2016
 Acuerdo de Junta de Facultad de Ciencias, sesión ordinaria 14 de junio de 2016 SISTEMAS DE EVALUACIÓN ORGANIZACIÓN DE LAS ACTIVIDADES DE EVALUACIÓN Los sistemas de evaluación y calificación del aprendizaje
Acuerdo de Junta de Facultad de Ciencias, sesión ordinaria 14 de junio de 2016 SISTEMAS DE EVALUACIÓN ORGANIZACIÓN DE LAS ACTIVIDADES DE EVALUACIÓN Los sistemas de evaluación y calificación del aprendizaje
SISTEMAS ROBOTIZADOS Asignatura optativa
 Área de Ingeniería de Sistemas y Automática Departamento de Lenguajes y Computación Universidad de Almería SISTEMAS ROBOTIZADOS Asignatura optativa PRACTICA 4 CONTROL DE ROBOTS MÓVILES UTILIZANDO EL MÉTODO
Área de Ingeniería de Sistemas y Automática Departamento de Lenguajes y Computación Universidad de Almería SISTEMAS ROBOTIZADOS Asignatura optativa PRACTICA 4 CONTROL DE ROBOTS MÓVILES UTILIZANDO EL MÉTODO
MODELADO Y CONTROL DINAMICO DE UN MANIPULADOR ROBOTICO CARTESIANO DE 3 GRADOS DE LIBERTAD
 MODELADO Y CONTROL DINAMICO DE UN MANIPULADOR ROBOTICO CARTESIANO DE 3 GRADOS DE LIBERTAD DYNAMIC MODELING AND CONTROL OF A CARTESIAN ROBOTIC MANIPULATOR OF 3 DOF Raúl Martínez Juárez Richar Suni Llanos
MODELADO Y CONTROL DINAMICO DE UN MANIPULADOR ROBOTICO CARTESIANO DE 3 GRADOS DE LIBERTAD DYNAMIC MODELING AND CONTROL OF A CARTESIAN ROBOTIC MANIPULATOR OF 3 DOF Raúl Martínez Juárez Richar Suni Llanos
ESCUELA POLITÉCNICA SUPERIOR DE CÓRDOBA GRADO DE INGENIERÍA ELECTRÓNICA INDUSTRIAL. Curso 2016/17. Asignatura: ROBÓTICA DATOS DE LA ASIGNATURA
 ESCUELA POLITÉCNICA SUPERIOR DE CÓRDOBA GRADO DE INGENIERÍA ELECTRÓNICA INDUSTRIAL Asignatura: DATOS DE LA ASIGNATURA Denominación: Código: 101372 Plan de estudios: GRADO DE INGENIERÍA ELECTRÓNICA INDUSTRIAL
ESCUELA POLITÉCNICA SUPERIOR DE CÓRDOBA GRADO DE INGENIERÍA ELECTRÓNICA INDUSTRIAL Asignatura: DATOS DE LA ASIGNATURA Denominación: Código: 101372 Plan de estudios: GRADO DE INGENIERÍA ELECTRÓNICA INDUSTRIAL
Educación en Automática
 Educación en Automática Ramón Rodríguez Pecharromán ramon@dea.icai.upco.es Rafael Palacios Hielscher Rafael.Palacios@iit.upco.es Marzo 2004 Antecedentes 2 Antecedentes 1. ICAI: Escuela Técnica Superior
Educación en Automática Ramón Rodríguez Pecharromán ramon@dea.icai.upco.es Rafael Palacios Hielscher Rafael.Palacios@iit.upco.es Marzo 2004 Antecedentes 2 Antecedentes 1. ICAI: Escuela Técnica Superior
Robótica PLANIFICACIONES Actualización: 1ºC/2017. Planificaciones Robótica. Docente responsable: ANIGSTEIN MAURICIO.
 Planificaciones 8615 - Robótica Docente responsable: ANIGSTEIN MAURICIO 1 de 7 OBJETIVOS El Robot es un componente cada vez más frecuente en las líneas de producción industrial y en actividades de servicios.
Planificaciones 8615 - Robótica Docente responsable: ANIGSTEIN MAURICIO 1 de 7 OBJETIVOS El Robot es un componente cada vez más frecuente en las líneas de producción industrial y en actividades de servicios.
PROYECTO DOCENTE ASIGNATURA: "Robótica Médica"
 PROYECTO DOCENTE ASIGNATURA: "Robótica Médica" Grupo: Clases Teórico-prácticas de Robótica Médica(981724) Titulacion: Grado en Ingeniería de la Salud por la Univ. de Málaga y la Univ.de Sevilla Curso:
PROYECTO DOCENTE ASIGNATURA: "Robótica Médica" Grupo: Clases Teórico-prácticas de Robótica Médica(981724) Titulacion: Grado en Ingeniería de la Salud por la Univ. de Málaga y la Univ.de Sevilla Curso:
Análisis Cinemático Directo del Robot RV-2AJ de Mitsubishi Utilizando Teoría de Screws
 1 Análisis Cinemático Directo del Robot RV-2AJ de Mitsubishi Utilizando Teoría de Screws Luis Villalobos, Karen Pimentel, Oscar Rivera, Manuel Cardona Facultad de Ingeniería, Universidad Don Bosco, El
1 Análisis Cinemático Directo del Robot RV-2AJ de Mitsubishi Utilizando Teoría de Screws Luis Villalobos, Karen Pimentel, Oscar Rivera, Manuel Cardona Facultad de Ingeniería, Universidad Don Bosco, El
Robótica Industrial UNIVERSIDAD DE BURGOS INGENIERÍA ELECTROMECÁNICA GUÍA DOCENTE Denominación de la asignatura: Robótica Industrial
 GUÍA DOCENTE 2012-2013 Robótica Industrial 1. Denominación de la asignatura: Robótica Industrial Titulación Grado en Ingeniería Electrónica y Automática Código 6432 2. Materia o módulo a la que pertenece
GUÍA DOCENTE 2012-2013 Robótica Industrial 1. Denominación de la asignatura: Robótica Industrial Titulación Grado en Ingeniería Electrónica y Automática Código 6432 2. Materia o módulo a la que pertenece
ASIGNATURA: CONTROL Y PROGRAMACIÓN DE ROBOTS CÓDIGO: 2261
 ASIGNATURA: CONTROL Y PROGRAMACIÓN DE ROBOTS CÓDIGO: 221 DEPARTAMENTO: DEPARTAMENTO DE INGENIERÍA DE SISTEMAS Y AUTOMÁTICA ÁREAS DE CONOCIMIENTO: DEPARTAMENTO DE INGENIERÍA DE SISTEMAS Y AUTOMÁTICA DESCRIPTORES
ASIGNATURA: CONTROL Y PROGRAMACIÓN DE ROBOTS CÓDIGO: 221 DEPARTAMENTO: DEPARTAMENTO DE INGENIERÍA DE SISTEMAS Y AUTOMÁTICA ÁREAS DE CONOCIMIENTO: DEPARTAMENTO DE INGENIERÍA DE SISTEMAS Y AUTOMÁTICA DESCRIPTORES
Guía docente de la asignatura
 Guía docente de la asignatura Asignatura Materia Titulación MODELADO, IDENTIFICACIÓN Y CONTROL AVANZADO AUTOMÁTICA INDUSTRIAL MASTER ELECTRÓNICA INDUSTRIAL Y AUTOMÁTICA Plan 568 Código 54144 Periodo de
Guía docente de la asignatura Asignatura Materia Titulación MODELADO, IDENTIFICACIÓN Y CONTROL AVANZADO AUTOMÁTICA INDUSTRIAL MASTER ELECTRÓNICA INDUSTRIAL Y AUTOMÁTICA Plan 568 Código 54144 Periodo de
ESCUELA POLITÉCNICA SUPERIOR DE CÓRDOBA
 Curso 7/8 DENOMINACIÓN DE LA ASIGNATURA Denominación: Código: 7 Plan de estudios: GRADO DE INGENIERÍA ELECTRÓNICA INDUSTRIAL Denominación del módulo al que pertenece: OPTATIVIDAD GENÉRICA Materia: Carácter:
Curso 7/8 DENOMINACIÓN DE LA ASIGNATURA Denominación: Código: 7 Plan de estudios: GRADO DE INGENIERÍA ELECTRÓNICA INDUSTRIAL Denominación del módulo al que pertenece: OPTATIVIDAD GENÉRICA Materia: Carácter:
ESCUELA POLITÉCNICA SUPERIOR DE CÓRDOBA
 Curso 8/ DENOMINACIÓN DE LA ASIGNATURA Denominación: ROBÓTICA Código: 7 Plan de estudios: GRADO DE INGENIERÍA ELECTRÓNICA INDUSTRIAL Curso: Denominación del módulo al que pertenece: OPTATIVIDAD GENÉRICA
Curso 8/ DENOMINACIÓN DE LA ASIGNATURA Denominación: ROBÓTICA Código: 7 Plan de estudios: GRADO DE INGENIERÍA ELECTRÓNICA INDUSTRIAL Curso: Denominación del módulo al que pertenece: OPTATIVIDAD GENÉRICA
TEORÍA DE MECANISMOS ANÁLISIS DE MECANISMOS POR ORDENADOR
 1/5 ANÁLISIS DE MECANISMOS POR ORDENADOR INTRODUCCIÓN En esta práctica se analizará cinemáticamente un determinado mecanismo plano empleando el método del cinema y se compararán los resultados obtenidos
1/5 ANÁLISIS DE MECANISMOS POR ORDENADOR INTRODUCCIÓN En esta práctica se analizará cinemáticamente un determinado mecanismo plano empleando el método del cinema y se compararán los resultados obtenidos
ESCUELA POLITÉCNICA SUPERIOR DE CÓRDOBA GRADO DE INGENIERÍA ELECTRÓNICA INDUSTRIAL. Curso 2015/16. Asignatura: ROBÓTICA DATOS DE LA ASIGNATURA
 ESCUELA POLITÉCNICA SUPERIOR DE CÓRDOBA GRADO DE INGENIERÍA ELECTRÓNICA INDUSTRIAL Asignatura: DATOS DE LA ASIGNATURA Denominación: Código: 101372 Plan de estudios: GRADO DE INGENIERÍA ELECTRÓNICA INDUSTRIAL
ESCUELA POLITÉCNICA SUPERIOR DE CÓRDOBA GRADO DE INGENIERÍA ELECTRÓNICA INDUSTRIAL Asignatura: DATOS DE LA ASIGNATURA Denominación: Código: 101372 Plan de estudios: GRADO DE INGENIERÍA ELECTRÓNICA INDUSTRIAL
LOS grupos de investigación GIAR (Grupo de
 III CONGRESO INTERNACIONAL DE INGENIERÍA MECATRÓNICA 1 Cinemática y Simulación de una Plataforma Robótica Paralela -RPS Diego Ospina Latorre Resumen Se presenta una plataforma robótica paralela de arquitectura
III CONGRESO INTERNACIONAL DE INGENIERÍA MECATRÓNICA 1 Cinemática y Simulación de una Plataforma Robótica Paralela -RPS Diego Ospina Latorre Resumen Se presenta una plataforma robótica paralela de arquitectura
FICHA DE ASIGNATURAS DE II PARA GUÍA DOCENTE. EXPERIENCIA PILOTO DE CRÉDITOS EUROPEOS. UNIVERSIDADES ANDALUZAS
 FICHA DE ASIGNATURAS DE II PARA GUÍA DOCENTE. EXPERIENCIA PILOTO DE CRÉDITOS EUROPEOS. UNIVERSIDADES ANDALUZAS. CURSO ACADÉMICO: 2008/09 DATOS BÁSICOS DE LA ASIGNATURA TITULACIÓN: Ingeniería Informática
FICHA DE ASIGNATURAS DE II PARA GUÍA DOCENTE. EXPERIENCIA PILOTO DE CRÉDITOS EUROPEOS. UNIVERSIDADES ANDALUZAS. CURSO ACADÉMICO: 2008/09 DATOS BÁSICOS DE LA ASIGNATURA TITULACIÓN: Ingeniería Informática
INGENIERÍA EN MECATRONICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE FUNDAMENTOS DE ROBÓTICA INDUSTRIAL
 INGENIERÍA EN MECATRONICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE FUNDAMENTOS DE ROBÓTICA INDUSTRIAL 1. Competencias Desarrollar proyectos de automatización y control, a través del diseño, la administración
INGENIERÍA EN MECATRONICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE FUNDAMENTOS DE ROBÓTICA INDUSTRIAL 1. Competencias Desarrollar proyectos de automatización y control, a través del diseño, la administración
BENEMÉRITA UNIVERSIDAD AUTÓNOMA DE PUEBLA FACULTAD CIENCIAS DE LA COMPUTACIÓN
 BENEMÉRITA UNIVERSIDAD AUTÓNOMA DE PUEBLA FACULTAD CIENCIAS DE LA COMPUTACIÓN PROGRAMA DE LA MATERIA CORRESPONDIENTE A LA INGENIERÍA EN CIENCIAS DE LA COMPUTACIÓN. Coordinación: NOMBRE DE LA MATERIA: Clave:
BENEMÉRITA UNIVERSIDAD AUTÓNOMA DE PUEBLA FACULTAD CIENCIAS DE LA COMPUTACIÓN PROGRAMA DE LA MATERIA CORRESPONDIENTE A LA INGENIERÍA EN CIENCIAS DE LA COMPUTACIÓN. Coordinación: NOMBRE DE LA MATERIA: Clave:
TECNOLÓGICO DE ESTUDIOS SUPERIORES DE ECATEPEC
 TECNOLÓGICO DE ESTUDIOS SUPERIORES DE ECATEPEC DIVISIÓN DE INGENIERÍA ELECTRÓNICA Y TELEMÁTICA PRÁCTICAS DE LABORATORIO ASIGNATURA: ROBÓTICA I REALIZÓ: GERARDO PAZOS RODRÍGUEZ PRESENTACIÓN El presente
TECNOLÓGICO DE ESTUDIOS SUPERIORES DE ECATEPEC DIVISIÓN DE INGENIERÍA ELECTRÓNICA Y TELEMÁTICA PRÁCTICAS DE LABORATORIO ASIGNATURA: ROBÓTICA I REALIZÓ: GERARDO PAZOS RODRÍGUEZ PRESENTACIÓN El presente
Pendiente de aprobación por la Comunidad de Madrid
 Titulación de Formación Profesional: TÉCNICO SUPERIOR EN DESARROLLO DE PRODUCTOS ELECTRÓNICOS MÓDULOS PROFESIONALES ASIGNATURAS ELECTRÓNICA ANALÓGICA LÓGICA DIGITAL Y MICROPROGRAMABLE ELECTRÓNICA I BAS
Titulación de Formación Profesional: TÉCNICO SUPERIOR EN DESARROLLO DE PRODUCTOS ELECTRÓNICOS MÓDULOS PROFESIONALES ASIGNATURAS ELECTRÓNICA ANALÓGICA LÓGICA DIGITAL Y MICROPROGRAMABLE ELECTRÓNICA I BAS
Introducción. 2.2 Transformaciones de coordenadas: matriz de rotación y ángulos de Euler.
 Agosto 2011 Introducción El análisis cinemático directo nos permite determinar en donde se encuentra el elemento terminal del robot (mano) si se conoce la posición de todas las articulaciones. 15 50 Posición?
Agosto 2011 Introducción El análisis cinemático directo nos permite determinar en donde se encuentra el elemento terminal del robot (mano) si se conoce la posición de todas las articulaciones. 15 50 Posición?
Cinemática Directa. Facultad de Cs. de la Computación. Juan Carlos Conde Ramírez. Computer Animation
 Cinemática Directa Facultad de Cs. de la Computación Juan Carlos Conde Ramírez Computer Animation Contenido 1 Introducción 2 Transformaciones homogéneas 3 Cinemática directa 4 Método Denavit-Hartenberg
Cinemática Directa Facultad de Cs. de la Computación Juan Carlos Conde Ramírez Computer Animation Contenido 1 Introducción 2 Transformaciones homogéneas 3 Cinemática directa 4 Método Denavit-Hartenberg
LABORATORIO REMOTO DE AUTOMÁTICA: Trabajos realizados y planes de futuro
 LABORATORIO REMOTO DE AUTOMÁTICA: Trabajos realizados y planes de futuro Ramon Costa, Luis Basañez Institut d'organització i Control de Sistemes Industrials (IOC) Escola Tècnica Superior d'enginyeria Industrial
LABORATORIO REMOTO DE AUTOMÁTICA: Trabajos realizados y planes de futuro Ramon Costa, Luis Basañez Institut d'organització i Control de Sistemes Industrials (IOC) Escola Tècnica Superior d'enginyeria Industrial
Nombre de la Asignatura: Robótica I Código: 6012 Período Académico: 1-16 Año: 2016 Número de Créditos: 3. Pertinencia para el Programa
 Formato básico para la elaboración de Syllabus ESCUELA TECNOLÓGICA INSTITUTO TÉCNICO CENTRAL - ETITC Vicerrectoría Académica Facultad: MECATRÓNICA Identificación del Espacio Académico Nombre de la Asignatura:
Formato básico para la elaboración de Syllabus ESCUELA TECNOLÓGICA INSTITUTO TÉCNICO CENTRAL - ETITC Vicerrectoría Académica Facultad: MECATRÓNICA Identificación del Espacio Académico Nombre de la Asignatura:
Curso ASIGNATURA Control y Programación de Robots
 ASIGNATURA Control y Programación de Robots TITULACIÓN Ingeniero de Telecomunicación Curso 2006/2007 PROFESORADO Profesorado: Aníbal Ollero Baturone (Responsable de la asignatura). Guillermo Heredia Benot
ASIGNATURA Control y Programación de Robots TITULACIÓN Ingeniero de Telecomunicación Curso 2006/2007 PROFESORADO Profesorado: Aníbal Ollero Baturone (Responsable de la asignatura). Guillermo Heredia Benot
Información (TI) Plan de estudios del Grado en Ingeniería Informática (II)
 Plan de estudios del Grado en Ingeniería Informática (II)") Plan de Estudios del Grado en Ingeniería de las Tecnologías de la Información (TI) Plan de estudios del Grado en Ingeniería Informática (II) CRÉDITOS Ingeniería Informática (II) Td Todas las asignaturas
Plan de Estudios del Grado en Ingeniería de las Tecnologías de la Información (TI) Plan de estudios del Grado en Ingeniería Informática (II) CRÉDITOS Ingeniería Informática (II) Td Todas las asignaturas
LABORATORIOS VIRTUALES Y REMOTOS BASADOS EN EJS PARA LA ENSEÑANZA DE ROBÓTICA INDUSTRIAL
 LABORATORIOS VIRTUALES Y REMOTOS BASADOS EN EJS PARA LA ENSEÑANZA DE ROBÓTICA INDUSTRIAL Carlos Alberto Jara Bravo, Francisco Andrés Candelas Herías y Fernando Torres Medina Grupo de Automática, Robótica
LABORATORIOS VIRTUALES Y REMOTOS BASADOS EN EJS PARA LA ENSEÑANZA DE ROBÓTICA INDUSTRIAL Carlos Alberto Jara Bravo, Francisco Andrés Candelas Herías y Fernando Torres Medina Grupo de Automática, Robótica
Andrés Mejías Borrero
 Ubicación de la Tesis y Concepto de La Tesis se sitúa en la línea de investigación dedicada a la Educación en Ingeniería dentro del Grupo de Investigación Control y Robótica (TEP 192). El laboratorio Remoto
Ubicación de la Tesis y Concepto de La Tesis se sitúa en la línea de investigación dedicada a la Educación en Ingeniería dentro del Grupo de Investigación Control y Robótica (TEP 192). El laboratorio Remoto
Guía docente de la asignatura
 Guía docente de la asignatura Asignatura Materia Programación de entornos robotizados Automática Módulo Titulación Máster en Informática Industrial Plan Código Periodo de impartición Cuatrimestre 1 Tipo/Carácter
Guía docente de la asignatura Asignatura Materia Programación de entornos robotizados Automática Módulo Titulación Máster en Informática Industrial Plan Código Periodo de impartición Cuatrimestre 1 Tipo/Carácter
MÓDULO III- Itinerario GESTIÓN E INNOVACIÓN EN TECNOLOGÍAS SANITARIAS
 MÓDULO III- Itinerario GESTIÓN E INNOVACIÓN EN TECNOLOGÍAS SANITARIAS Gestión e innovación empresarial en IB CARÁCTER ECTS MATERIA OPTATIVA: OBLIGATORIA ITINERARIO 3 ECTS DESPLIEGUE TEMPORAL: Semestral
MÓDULO III- Itinerario GESTIÓN E INNOVACIÓN EN TECNOLOGÍAS SANITARIAS Gestión e innovación empresarial en IB CARÁCTER ECTS MATERIA OPTATIVA: OBLIGATORIA ITINERARIO 3 ECTS DESPLIEGUE TEMPORAL: Semestral
Control cinemático y dinámico de robots omnidireccionales
 1 Diciembre 2013 Control cinemático y dinámico de robots omnidireccionales basado parcialmente en: Siegwart, Nourbakhsh y Scaramuzza, Introduction to Autonomous Mobile Robots Campion, et al., Structural
1 Diciembre 2013 Control cinemático y dinámico de robots omnidireccionales basado parcialmente en: Siegwart, Nourbakhsh y Scaramuzza, Introduction to Autonomous Mobile Robots Campion, et al., Structural
DISEÑO CURRICULAR CARGA HORARIA OPCION DE CURSADA CARGA HORARIA OPCION DE CURSADA NOMBRE DE LA ACTIVIDAD PRIMER CUATRIMESTRE PRIMER CUATRIMESTRE
 DISEÑO CURRICULAR MODALIDAD NOMBRE DE LA ACTIVIDAD PRIMER CUATRIMESTRE OPCION DE CURSADA CARGA HORARIA Asignatura 01. Complementos de Matemática I Presencial 50 hs Asignatura 02. Trigonometría Plana Presencial
DISEÑO CURRICULAR MODALIDAD NOMBRE DE LA ACTIVIDAD PRIMER CUATRIMESTRE OPCION DE CURSADA CARGA HORARIA Asignatura 01. Complementos de Matemática I Presencial 50 hs Asignatura 02. Trigonometría Plana Presencial
Planificaciones Teoría de Control II. Docente responsable: SACO ROBERTO. 1 de 5
 Planificaciones 6628 - Teoría de Control II Docente responsable: SACO ROBERTO 1 de 5 OBJETIVOS En este curso se introduce al estudiante de ingeniería electrónica a los problemas del control de sistemas
Planificaciones 6628 - Teoría de Control II Docente responsable: SACO ROBERTO 1 de 5 OBJETIVOS En este curso se introduce al estudiante de ingeniería electrónica a los problemas del control de sistemas
UNIVERSIDAD AUTÓNOMA DEL ESTADO DE HIDALGO
 UNIVERSIDAD AUTÓNOMA DEL ESTADO DE HIDALGO UBICACIÓN DIVISIÓN DE DOCENCIA DIRECCIÓN DE PLANEACIÓN Y DESARROLLO EDUCATIVO PROGRAMA DE ESTUDIO LICENCIATURA EN: SISTEMAS COMPUTACIONALES (Nombre completo)
UNIVERSIDAD AUTÓNOMA DEL ESTADO DE HIDALGO UBICACIÓN DIVISIÓN DE DOCENCIA DIRECCIÓN DE PLANEACIÓN Y DESARROLLO EDUCATIVO PROGRAMA DE ESTUDIO LICENCIATURA EN: SISTEMAS COMPUTACIONALES (Nombre completo)