Robótica humanoide. Los. Miguel González-Fierro
|
|
|
- José Luis Velázquez Río
- hace 7 años
- Vistas:
Transcripción


1 Robótica humanoide. Los robots HOAP-3 y RH-2 Miguel González-Fierro
2 Índice Por qué robots humanoides? Algunos robots humanoides Robots humanoides en la UC3M Control de robots humanoides Cinemática Dinámica Locomoción Criterio de estabilidad Planificación de movimientos Simuladores Conclusiones y discusión 2


3 Por qué robots humanoides? 3








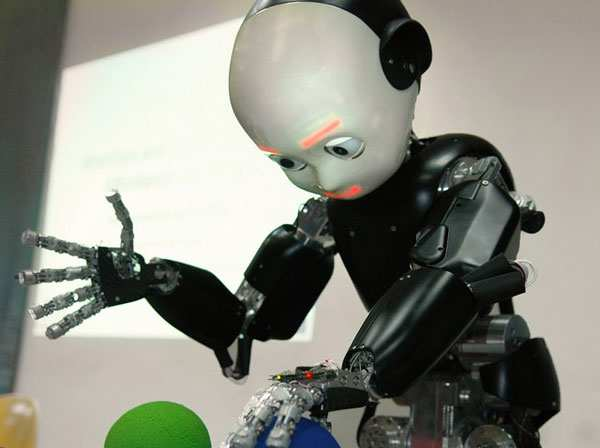
4 Minihumanoides 4








5 Androides 5


6 Androides Uncanny valley M. Mori (1970) 6





7 Robots humanoides 7
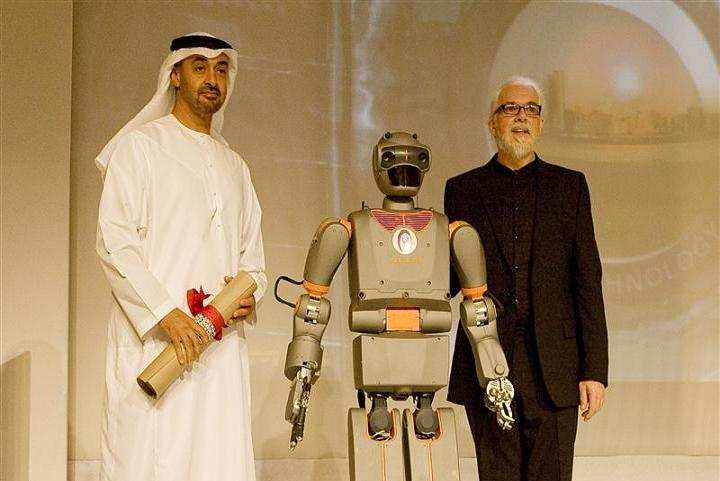






8 Robots humanoides 8


9 HOAP-3 28 DoF 60 cm 8,8 Kg Pentium 1.1 Ghz, 512 Mb RT Linux FSRs en pies y manos Visión estéreo Acelerómetros y giróscopos Infrarrojos 9






10 RH-1: 50Kg 150cm 21 DoF 500gr Manip. RH-1 / RH-2 +1dof +2dof RH-2: 60Kg (est.) 160cm 25 DoF 2Kg Manip. Diferente estructura Sensor F/T No hay sensor. Estructura rígida en pie Tensor necesario Absorbe el impacto de la pisada Tensor automático. No hay pérdidas de potencia 10


11 Control de robots Interacción humano-robot Seguridad y fiabilidad Recibir y ejecutar órdenes Planificación de tareas Visión / Sensores Manipulación SLAM Control de movimiento Cinemática Dinámica Estabilidad 11
 respecto de la base.")
12 Cinemática Cadena cinemática Eslabón Articulación Nº de grados de libertad Es necesario conocer la orientación y posición del extremo (end effector) respecto de la base. Existen distintas herramientas matemáticas: matrices de transformación, ángulos de Euler, cuaternios 12
13 Matrices de transformación 13

14 Cinemática directa e inversa 14
15 Parámetros Denavit-Hartenberg En robótica se expresan las coordenadas de una articulación en función de las de la anterior. Mediante sólo 4 parámetros define completamente la posición y orientación de (a,α,d,θ). 15

16 Matriz Jacobiana Relaciona las velocidades articulares con velocidades cartesianas del end-effector. 16
17 Pseudoinversa Relaciona las velocidades cartesianas del end-effector con velocidades articulares. J no siempre tiene inversa Pseudoinversa 17
18 Bucle de control 18

")

19 Dinámica En todo movimiento hay que tener en cuenta las fuerzas de la gravedad y la inercia. Pares articulares (T0,T1,,Tn) Dinámica directa Dinámica inversa Aceleraciones articulares (a0,a1,,an) 19
20 Formulaciones Ecuación de movimiento: Formulación de Lagrange: Formulación de Newton-Euler: 20
21 Algoritmos dinámicos Los algoritmos modernos son recursivos. Tienen alto coste computacional. Se recurre a modelos dinámicos reducidos. 21
22 Locomoción bípeda 22
23 Criterio de estabilidad Zero Moment Point (Vokobratovic,1968): Punto respecto del cual el momento creado por las fuerzas de inercia y gravedad no tiene componente en el eje horizontal. 23

24 Péndulo invertido 3D-LIPM: 3D Linear Inverted Pendulum Mode (Kajita,2001) Simplificación de la dinámica del robot como una masa puntual. Relaciona la posición del ZMP con el centro de gravedad del robot. 24
25 Generación de trayectorias estables Cart-Table (Kajita,2003). Para generar trayectorias estables se debe introducir una referencia ZMP. Esto se hace mediante control predictivo. 25


26 Planificación de movimientos 26
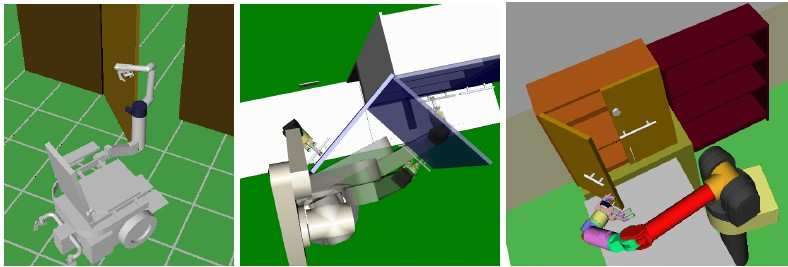

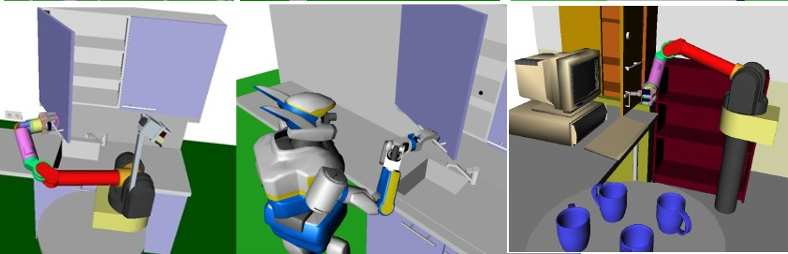

27 Simuladores Open-HRP Open-Rave 27
28 Conclusiones Los robots humanoides son candidatos a colaborar con nosotros. La robótica es un campo con mucho futuro. En la UC3M se está investigando en este tema. Existen muchos problemas no resueltos es robótica humanoide. 28
29 Muchas gracias 29
Contenido. Prefacio... Acerca de los autores...
 Contenido Prefacio... Acerca de los autores... xi xvi Capítulo 1. Introducción... 1 1.1. Antecedentes históricos... 2 1.2. Origen y desarrollo de la robótica... 8 1.3. Definición del Robot... 16 1.3.1.
Contenido Prefacio... Acerca de los autores... xi xvi Capítulo 1. Introducción... 1 1.1. Antecedentes históricos... 2 1.2. Origen y desarrollo de la robótica... 8 1.3. Definición del Robot... 16 1.3.1.
CINEMÁTICA DEL ROBOT
 CINEMÁTICA DEL ROBOT Cinemática Directa Cinemática Inversa Matriz Jacobiana 1 Problema cinemático del robot Cinemática del robot: Estudio de su movimiento con respecto a un sistema de referencia: Descripción
CINEMÁTICA DEL ROBOT Cinemática Directa Cinemática Inversa Matriz Jacobiana 1 Problema cinemático del robot Cinemática del robot: Estudio de su movimiento con respecto a un sistema de referencia: Descripción
Jornada Sage/Python. 15 de Julio Experiencia docente en "Control y programación de robots" utilizando Sage
 Experiencia docente en "Control y programación de robots" utilizando Sage Jornada Sage/Python 15 de Julio 2010 Profesor: Carlos Elvira Izurategui Área de Ingeniería de Sistemas y Automática Universidad
Experiencia docente en "Control y programación de robots" utilizando Sage Jornada Sage/Python 15 de Julio 2010 Profesor: Carlos Elvira Izurategui Área de Ingeniería de Sistemas y Automática Universidad
ROBOTICA por OLLERO BATURONE Editorial Marcombo. Foreword Prólogo Prefacio del autor
 ROBOTICA por OLLERO BATURONE Editorial Marcombo Foreword Prólogo Prefacio del autor CAPÍTULO 1. Introducción 1.1. Robótica 1.2. Esquema general del sistema robot 1.3. Robots manipuladores 1.3.1. Sistema
ROBOTICA por OLLERO BATURONE Editorial Marcombo Foreword Prólogo Prefacio del autor CAPÍTULO 1. Introducción 1.1. Robótica 1.2. Esquema general del sistema robot 1.3. Robots manipuladores 1.3.1. Sistema
2015, Año del Generalísimo José María Morelos y Pavón
 Nombre de la Asignatura: ROBOTICA Línea de Investigación o Trabajo: PROCESAMIENTO DE SEÑALES ELECTRICAS Y ELECTRONICAS Tiempo de dedicación del estudiante a las actividades de: DOC-TIS-TPS-CRÉDITOS 48
Nombre de la Asignatura: ROBOTICA Línea de Investigación o Trabajo: PROCESAMIENTO DE SEÑALES ELECTRICAS Y ELECTRONICAS Tiempo de dedicación del estudiante a las actividades de: DOC-TIS-TPS-CRÉDITOS 48
PLAN DE ESTUDIOS 2008-II SÍLABO
 UNIVERSIDAD RICARDO PALMA FACULTAD DE INGENIERÍA I. INFORMACIÓN GENERAL: DEPARTAMENTO ACADÉMICO DE INGENIERÍA PLAN DE ESTUDIOS 2008-II SÍLABO 1.1 Asignatura : ROBÓTICA 1.2. Ciclo : VIII 1.3 Carrera Profesional
UNIVERSIDAD RICARDO PALMA FACULTAD DE INGENIERÍA I. INFORMACIÓN GENERAL: DEPARTAMENTO ACADÉMICO DE INGENIERÍA PLAN DE ESTUDIOS 2008-II SÍLABO 1.1 Asignatura : ROBÓTICA 1.2. Ciclo : VIII 1.3 Carrera Profesional
Robots Humanoides: La Ciencia Ficción Hecha Realidad Prof. Carlos Balaguer RoboticsLab-UC3M
 Robots Humanoides: La Ciencia Ficción Hecha Realidad Prof. Carlos Balaguer RoboticsLab-UC3M http://roboticslab.uc3m.es 25-Marzo-2014 Índice 1. La Ciencia Ficción Humanoide 2. La Complejidad Exponencial
Robots Humanoides: La Ciencia Ficción Hecha Realidad Prof. Carlos Balaguer RoboticsLab-UC3M http://roboticslab.uc3m.es 25-Marzo-2014 Índice 1. La Ciencia Ficción Humanoide 2. La Complejidad Exponencial
Dinámica del Robot. UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides
 UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción La dinámica se ocupa de la relación entre las fuerzas que actúan sobre un cuerpo y el movimiento en el que se origina.
UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción La dinámica se ocupa de la relación entre las fuerzas que actúan sobre un cuerpo y el movimiento en el que se origina.
Cinemática del Robot
 Cinemática del Robot La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. En primer término, la cinemática se interesa por la descripción analítica del movimiento
Cinemática del Robot La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. En primer término, la cinemática se interesa por la descripción analítica del movimiento
Fundamentos de Robótica
 Fundamentos de Robótica Introducción a la cinemática de manipuladores hamontesv@uaemex.mx http://scfi.uaemex.mx/hamontes 1 Recomendación No use estas diapositivas como referencia única de estudio durante
Fundamentos de Robótica Introducción a la cinemática de manipuladores hamontesv@uaemex.mx http://scfi.uaemex.mx/hamontes 1 Recomendación No use estas diapositivas como referencia única de estudio durante
Cinemática del Robot. UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides
 UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. Se interesa por la
UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. Se interesa por la
MODELADO Y CONTROL DINAMICO DE UN MANIPULADOR ROBOTICO CARTESIANO DE 3 GRADOS DE LIBERTAD
 MODELADO Y CONTROL DINAMICO DE UN MANIPULADOR ROBOTICO CARTESIANO DE 3 GRADOS DE LIBERTAD DYNAMIC MODELING AND CONTROL OF A CARTESIAN ROBOTIC MANIPULATOR OF 3 DOF Raúl Martínez Juárez Richar Suni Llanos
MODELADO Y CONTROL DINAMICO DE UN MANIPULADOR ROBOTICO CARTESIANO DE 3 GRADOS DE LIBERTAD DYNAMIC MODELING AND CONTROL OF A CARTESIAN ROBOTIC MANIPULATOR OF 3 DOF Raúl Martínez Juárez Richar Suni Llanos
ROBOTICA II. UNIDAD 2
 ROBOTICA II. UNIDAD 2 MODELO DINÁMICO. En robótica, la cinemática y la dinámica se combinan para lograr el posicionamiento de una serie de eslabones articulados o brazo de robot. Las consideraciones cinemáticas
ROBOTICA II. UNIDAD 2 MODELO DINÁMICO. En robótica, la cinemática y la dinámica se combinan para lograr el posicionamiento de una serie de eslabones articulados o brazo de robot. Las consideraciones cinemáticas
Control y programación de robots
 Control y programación de robots 11. Solución cinemática inversa y directa de robots seriales 11.1 El alumno, tras recibir y estudiar esta clase, debe ser capaz de: Comprender el modelado de la cinemática
Control y programación de robots 11. Solución cinemática inversa y directa de robots seriales 11.1 El alumno, tras recibir y estudiar esta clase, debe ser capaz de: Comprender el modelado de la cinemática
Capacitación Tecnológica Científica para Bolivia. Introducción al modelado de robots
 Catecbol Capacitación Tecnológica Científica para Bolivia www.catecbol.com facebook.com/catecbol @catecbol catecbol@gmail.com Introducción al modelado de robots Ronald Terrazas Mallea Bélgica La unión
Catecbol Capacitación Tecnológica Científica para Bolivia www.catecbol.com facebook.com/catecbol @catecbol catecbol@gmail.com Introducción al modelado de robots Ronald Terrazas Mallea Bélgica La unión
Simulador Basado en un Sistema Bípedo Simple
 La Mecatrónica en México, Vol. 3, No. 2, páginas 35-43, Mayo 214 Simulador Basado en un Sistema Bípedo Simple Cuatlaxahue-Formacio Sandra y Sánchez-Sánchez Pablo Benemérita Universidad Autónoma de Puebla
La Mecatrónica en México, Vol. 3, No. 2, páginas 35-43, Mayo 214 Simulador Basado en un Sistema Bípedo Simple Cuatlaxahue-Formacio Sandra y Sánchez-Sánchez Pablo Benemérita Universidad Autónoma de Puebla
ANX-PR/CL/ GUÍA DE APRENDIZAJE. ASIGNATURA Robotica. CURSO ACADÉMICO - SEMESTRE Primer semestre
 ANX-PR/CL/001-02 GUÍA DE APRENDIZAJE ASIGNATURA Robotica CURSO ACADÉMICO - SEMESTRE 2015-16 - Primer semestre GA_05TI_55000105_1S_2015-16 Datos Descriptivos Nombre de la Asignatura Titulación Centro responsable
ANX-PR/CL/001-02 GUÍA DE APRENDIZAJE ASIGNATURA Robotica CURSO ACADÉMICO - SEMESTRE 2015-16 - Primer semestre GA_05TI_55000105_1S_2015-16 Datos Descriptivos Nombre de la Asignatura Titulación Centro responsable
Robótica PLANIFICACIONES Actualización: 1ºC/2017. Planificaciones Robótica. Docente responsable: ANIGSTEIN MAURICIO.
 Planificaciones 8615 - Robótica Docente responsable: ANIGSTEIN MAURICIO 1 de 7 OBJETIVOS El Robot es un componente cada vez más frecuente en las líneas de producción industrial y en actividades de servicios.
Planificaciones 8615 - Robótica Docente responsable: ANIGSTEIN MAURICIO 1 de 7 OBJETIVOS El Robot es un componente cada vez más frecuente en las líneas de producción industrial y en actividades de servicios.
ANX-PR/CL/ GUÍA DE APRENDIZAJE
 PROCESO DE COORDINACIÓN DE LAS ENSEÑANZAS PR/CL/001 ASIGNATURA 53001152 - PLAN DE ESTUDIOS 05AY - CURSO ACADÉMICO Y SEMESTRE 2017-18 - Primer semestre Índice Guía de Aprendizaje 1. Datos descriptivos...1
PROCESO DE COORDINACIÓN DE LAS ENSEÑANZAS PR/CL/001 ASIGNATURA 53001152 - PLAN DE ESTUDIOS 05AY - CURSO ACADÉMICO Y SEMESTRE 2017-18 - Primer semestre Índice Guía de Aprendizaje 1. Datos descriptivos...1
PROGRAMA DE LA ASIGNATURA: Control y programación de robots. Código: Curso 2006/2007
 PROGRAMA DE LA ASIGNATURA: Control y programación de robots Código: 3042104010 Curso 2006/2007 CENTRO: ESCUELA TÉCNICA SUPERIOR DE INGENIEROS INDUSTRIALES TITULACIÓN: INGENIERÍA AUTOMÁTICA Y ELECTRÓNICA
PROGRAMA DE LA ASIGNATURA: Control y programación de robots Código: 3042104010 Curso 2006/2007 CENTRO: ESCUELA TÉCNICA SUPERIOR DE INGENIEROS INDUSTRIALES TITULACIÓN: INGENIERÍA AUTOMÁTICA Y ELECTRÓNICA
Control de Robots Manipuladores
 NOMBRE DE LA ASIGNATURA: BENEMÉRITA UNIVERSIDAD AUTÓNOMA DE PUEBLA FACULTAD DE CIENCIAS DE LA ELECTRÓNICA PROGRAMA DE ESTUDIOS DE LA MAESTRÍA EN CIENCIAS DE LA ELECTRÓNICA CON OPCIÓN EN AUTOMATIZACIÓN
NOMBRE DE LA ASIGNATURA: BENEMÉRITA UNIVERSIDAD AUTÓNOMA DE PUEBLA FACULTAD DE CIENCIAS DE LA ELECTRÓNICA PROGRAMA DE ESTUDIOS DE LA MAESTRÍA EN CIENCIAS DE LA ELECTRÓNICA CON OPCIÓN EN AUTOMATIZACIÓN
DATOS BÁSICOS DE LA MATERIA
 EXPERIENCIA PILOTO DE CRÉDITOS EUROPEOS. UNIVERSIDADES ANDALUZAS GUÍA DOCENTE PARTICULAR DE INGENIERO EN AUTOMÁTICA Y ELECTRÓNICA INDUSTRIAL FICHA DE MATERIAS DATOS BÁSICOS DE LA MATERIA NOMBRE: CONTROL
EXPERIENCIA PILOTO DE CRÉDITOS EUROPEOS. UNIVERSIDADES ANDALUZAS GUÍA DOCENTE PARTICULAR DE INGENIERO EN AUTOMÁTICA Y ELECTRÓNICA INDUSTRIAL FICHA DE MATERIAS DATOS BÁSICOS DE LA MATERIA NOMBRE: CONTROL
Dr. Roberto Carlos García Gómez
 Dr. Roberto Carlos García Gómez La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. La cinemática se interesa por la descripción analítica del movimiento espacial
Dr. Roberto Carlos García Gómez La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. La cinemática se interesa por la descripción analítica del movimiento espacial
[ROBÓTICA ARTICULAR]
![[ROBÓTICA ARTICULAR]](/thumbs/65/52906152.jpg "[ROBÓTICA ARTICULAR]") Trabajo de curso de la asignatura Automatización y Robótica Industriales [ROBÓTICA ARTICULAR] Introducción 2º curso de Ingeniería en Automática y Electrónica Curso 2007/08 El objetivo de este trabajo de
Trabajo de curso de la asignatura Automatización y Robótica Industriales [ROBÓTICA ARTICULAR] Introducción 2º curso de Ingeniería en Automática y Electrónica Curso 2007/08 El objetivo de este trabajo de
Nombre del documento: Programa de Estudio de asignatura de Especialidad
 1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Robótica Carrera: Ingeniería Mecatrónica Clave de la asignatura: IMF - 1203 (Créditos) SATCA1 3-2 - 8 2.- PRESENTACIÓN Caracterización de la asignatura.
1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Robótica Carrera: Ingeniería Mecatrónica Clave de la asignatura: IMF - 1203 (Créditos) SATCA1 3-2 - 8 2.- PRESENTACIÓN Caracterización de la asignatura.
Robótica I ACF Participantes Comité para el Diseño de Especialidad de la DIET. Academia de Sistemas Digitales de la DIET
 1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica II Ingeniería Electrónica ACF - 080 2 8 2. HISTORIA DEL PROGRAMA. Lugar
1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica II Ingeniería Electrónica ACF - 080 2 8 2. HISTORIA DEL PROGRAMA. Lugar
TSTC. Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 1 INTRODUCCIÓN A LA ROBÓTICA
 Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 1 INTRODUCCIÓN A LA ROBÓTICA Secciones 1. Introducción y definiciones. 2. Visión General de la manipulación mecánica. 1. Posicionamiento y Cinemática
Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 1 INTRODUCCIÓN A LA ROBÓTICA Secciones 1. Introducción y definiciones. 2. Visión General de la manipulación mecánica. 1. Posicionamiento y Cinemática
Control Cinemático. Funciones de control cinemático Tipos de trayectorias Interpolación de trayectorias. Robotica Industrial- Control cinemático 2
 Control Cinemático Funciones de control cinemático Tipos de trayectorias Interpolación de trayectorias Robotica Industrial- Control cinemático 2 Objetivos del control cinemático Establecer cuales son las
Control Cinemático Funciones de control cinemático Tipos de trayectorias Interpolación de trayectorias Robotica Industrial- Control cinemático 2 Objetivos del control cinemático Establecer cuales son las
Robótica Modular y locomoción: Aplicación a Robots Ápodos
 Robótica Modular y locomoción: Aplicación a Robots Ápodos D. Juan González Gómez Tesis Doctoral Director: Dr. Eduardo Boemo Scalvinoni Contenidos Contenidos 1. Introducción 2. Clasificación 3. Locomoción
Robótica Modular y locomoción: Aplicación a Robots Ápodos D. Juan González Gómez Tesis Doctoral Director: Dr. Eduardo Boemo Scalvinoni Contenidos Contenidos 1. Introducción 2. Clasificación 3. Locomoción
Mecánica y Ondas. Planteamiento y resolución de problemas tipo
 Mecánica y Ondas. Planteamiento y resolución de problemas tipo Alvaro Perea Covarrubias Doctor en Ciencias Físicas Universidad Nacional de Educación a Distancia Madrid, Enero 2005 Capítulo 1. Leyes de
Mecánica y Ondas. Planteamiento y resolución de problemas tipo Alvaro Perea Covarrubias Doctor en Ciencias Físicas Universidad Nacional de Educación a Distancia Madrid, Enero 2005 Capítulo 1. Leyes de
Introducción a la Robótica Mecanismos básicos: cinemática
 Introducción a la Robótica Mecanismos básicos: cinemática Dr José Martínez Carranza carranza@inaoep.mx Coordinación de Ciencias Computacionales, INAOE Cinemática (1) La cinemática es una rama de la Física
Introducción a la Robótica Mecanismos básicos: cinemática Dr José Martínez Carranza carranza@inaoep.mx Coordinación de Ciencias Computacionales, INAOE Cinemática (1) La cinemática es una rama de la Física
ANX-PR/CL/ GUÍA DE APRENDIZAJE. ASIGNATURA Robotica. CURSO ACADÉMICO - SEMESTRE Primer semestre
 ANX-PR/CL/001-01 GUÍA DE APRENDIZAJE ASIGNATURA Robotica CURSO ACADÉMICO - SEMESTRE 2016-17 - Primer semestre GA_05TI_55000105_1S_2016-17 Datos Descriptivos Nombre de la Asignatura Titulación Centro responsable
ANX-PR/CL/001-01 GUÍA DE APRENDIZAJE ASIGNATURA Robotica CURSO ACADÉMICO - SEMESTRE 2016-17 - Primer semestre GA_05TI_55000105_1S_2016-17 Datos Descriptivos Nombre de la Asignatura Titulación Centro responsable
ROBÓTICA I. Cinemática Directa
 Cinemática Directa M. C. Jorge Luis Barahona Avalos 11 de abril de 2011 Universidad Tecnológica de la Mixteca Instituto de Electrónica y Mecatrónica 1 / 34 Índice General 1 Cinemática Directa 2 Cadena
Cinemática Directa M. C. Jorge Luis Barahona Avalos 11 de abril de 2011 Universidad Tecnológica de la Mixteca Instituto de Electrónica y Mecatrónica 1 / 34 Índice General 1 Cinemática Directa 2 Cadena
ASIGNATURA: CONTROL Y PROGRAMACIÓN DE ROBOTS CÓDIGO: 2261
 ASIGNATURA: CONTROL Y PROGRAMACIÓN DE ROBOTS CÓDIGO: 221 DEPARTAMENTO: DEPARTAMENTO DE INGENIERÍA DE SISTEMAS Y AUTOMÁTICA ÁREAS DE CONOCIMIENTO: DEPARTAMENTO DE INGENIERÍA DE SISTEMAS Y AUTOMÁTICA DESCRIPTORES
ASIGNATURA: CONTROL Y PROGRAMACIÓN DE ROBOTS CÓDIGO: 221 DEPARTAMENTO: DEPARTAMENTO DE INGENIERÍA DE SISTEMAS Y AUTOMÁTICA ÁREAS DE CONOCIMIENTO: DEPARTAMENTO DE INGENIERÍA DE SISTEMAS Y AUTOMÁTICA DESCRIPTORES
ROBÓTICA I. Cinemática Directa
 Cinemática Directa M. C. Jorge Luis Barahona Avalos 2 de mayo de 2012 Universidad Tecnológica de la Mixteca Instituto de Electrónica y Mecatrónica 1 / 42 Índice General 1 Cinemática Directa 2 Cadena Cinemática
Cinemática Directa M. C. Jorge Luis Barahona Avalos 2 de mayo de 2012 Universidad Tecnológica de la Mixteca Instituto de Electrónica y Mecatrónica 1 / 42 Índice General 1 Cinemática Directa 2 Cadena Cinemática
240IAU11 - Fundamentos de Robótica
 Unidad responsable: 240 - ETSEIB - Escuela Técnica Superior de Ingeniería Industrial de Barcelona Unidad que imparte: 707 - ESAII - Departamento de Ingeniería de Sistemas, Automática e Informática Industrial
Unidad responsable: 240 - ETSEIB - Escuela Técnica Superior de Ingeniería Industrial de Barcelona Unidad que imparte: 707 - ESAII - Departamento de Ingeniería de Sistemas, Automática e Informática Industrial
LIM. Modelado 3D del sistema de fondeo de un barco para la fabricación de maquetas y simulación dinámica con el software SIMULANCLA
 Trabajo fin de Grado Modelado 3D del sistema de fondeo de un barco para la fabricación de maquetas y simulación dinámica con el software SIMULANCLA Autor: Diego Saya Carro Tutor: Daniel Dopico Dopico Ana
Trabajo fin de Grado Modelado 3D del sistema de fondeo de un barco para la fabricación de maquetas y simulación dinámica con el software SIMULANCLA Autor: Diego Saya Carro Tutor: Daniel Dopico Dopico Ana
INSTITUTO TECNOLÓGICO DE VERACRUZ ANTORCHA Y LUZ DE FUEGO PERMANENTE
 INSTITUTO TECNOLÓGICO DE VERACRUZ ANTORCHA Y LUZ DE FUEGO PERMANENTE INGENIERIA MECATRONICA INGENIERIA MECATRONICA REPRESENTACION DE DENAVIT-HARTENBERG CADENAS CINEMATICAS CNIEMATICA DIRECTA CATEDRATICO:
INSTITUTO TECNOLÓGICO DE VERACRUZ ANTORCHA Y LUZ DE FUEGO PERMANENTE INGENIERIA MECATRONICA INGENIERIA MECATRONICA REPRESENTACION DE DENAVIT-HARTENBERG CADENAS CINEMATICAS CNIEMATICA DIRECTA CATEDRATICO:
Elementos básicos de matemáticas en la cinemática inversa
 Culcyt//Matemáticas Elementos básicos de matemáticas en la cinemática inversa Oscar Guerrero Miramontes, Sergio Flores García María D. González Quezada, Juan Luna González, Juan E. Chávez Pierce, Luis
Culcyt//Matemáticas Elementos básicos de matemáticas en la cinemática inversa Oscar Guerrero Miramontes, Sergio Flores García María D. González Quezada, Juan Luna González, Juan E. Chávez Pierce, Luis
Robótica I ACB Participantes Comité para el Diseño de Especialidad de la DIET. Academia de Sistemas Digitales de la DIET
 1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica I Ingeniería Electrónica ACB - 0802 4 0 8 2. HISTORIA DEL PROGRAMA. Lugar
1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica I Ingeniería Electrónica ACB - 0802 4 0 8 2. HISTORIA DEL PROGRAMA. Lugar
Sólido Rígido. Miguel Ángel Otaduy. Animación Avanzada 6 de Febrero de 2014
 Sólido Rígido Miguel Ángel Otaduy Animación Avanzada 6 de Febrero de 2014 Vídeo Juegos Batman: Arkham Asylum (nvidia Physx) Índice Cinemática Traslación, rotación Velocidad lineal, velocidad angular Dinámica
Sólido Rígido Miguel Ángel Otaduy Animación Avanzada 6 de Febrero de 2014 Vídeo Juegos Batman: Arkham Asylum (nvidia Physx) Índice Cinemática Traslación, rotación Velocidad lineal, velocidad angular Dinámica
Tema 5. Cinemática Inversa
 UNIVERSIDAD POLITÉCNICA DE MADRID E.U.I.T. Industrial TEMA: Cinemática Inversa FECHA: Enero de 01 Titulación: Grado en Ingeniería Electrónica y Automática Área: Ingeniería de Sistemas y Automática Departamento
UNIVERSIDAD POLITÉCNICA DE MADRID E.U.I.T. Industrial TEMA: Cinemática Inversa FECHA: Enero de 01 Titulación: Grado en Ingeniería Electrónica y Automática Área: Ingeniería de Sistemas y Automática Departamento
8º CONGRESO IBEROAMERICANO DE INGENIERIA MECANICA Cusco, 23 al 25 de Octubre de 2007
 8º CONGRESO IBEROAMERICANO DE INGENIERIA MECANICA Cusco, 23 al 25 de Octubre de 27 MODELADO Y SIMULACION DE UN CAMINADOR BIPEDO EQUILIBRADO POR CONTRAPESO Ramírez Heredia R. E. *, Naranjo Ocampo A. R.,
8º CONGRESO IBEROAMERICANO DE INGENIERIA MECANICA Cusco, 23 al 25 de Octubre de 27 MODELADO Y SIMULACION DE UN CAMINADOR BIPEDO EQUILIBRADO POR CONTRAPESO Ramírez Heredia R. E. *, Naranjo Ocampo A. R.,
Modelado cinemático directo de un robot humanoide Universidad Politécnica de Sinaloa 1. Antecedentes 2. Marco teórico Espacio de articulaciones
 Modelado cinemático directo de un robot humanoide Dr. José Víctor Núñez Nalda M. C. Dora Rodríguez M. C. Víctor Rodríguez Velázquez Universidad Politécnica de Sinaloa jnunez, drodriguez, vmrodriguez@upsin.edu.m
Modelado cinemático directo de un robot humanoide Dr. José Víctor Núñez Nalda M. C. Dora Rodríguez M. C. Víctor Rodríguez Velázquez Universidad Politécnica de Sinaloa jnunez, drodriguez, vmrodriguez@upsin.edu.m
CURSO 2015/2016 FÍSICA
 INFORMACIÓN SOBRE LA PRUEBA DE ACCESO PARA MAYORES DE 25 AÑOS CURSO 2015/2016 FÍSICA 1. TEMARIO: CONTENIDOS Y BIBLOGRAFÍA RECOMENDADA. 1. Magnitudes escalares y vectoriales. Algebra vectorial. Sistemas
INFORMACIÓN SOBRE LA PRUEBA DE ACCESO PARA MAYORES DE 25 AÑOS CURSO 2015/2016 FÍSICA 1. TEMARIO: CONTENIDOS Y BIBLOGRAFÍA RECOMENDADA. 1. Magnitudes escalares y vectoriales. Algebra vectorial. Sistemas
Cinemática directa. Dan Casas
 Dan Casas 1 1. Introducción Cinemática directa Un modelo jerárquico se compone de varias mallas, relacionadas unas con otras de la misma manera que un esqueleto está compuesto de huesos, excepto que no
Dan Casas 1 1. Introducción Cinemática directa Un modelo jerárquico se compone de varias mallas, relacionadas unas con otras de la misma manera que un esqueleto está compuesto de huesos, excepto que no
LIM. Simulador de grúa hidráulica para aplicaciones marinas. Proyecto de fin de carrera. Ingeniería Industrial.
 Proyecto de fin de carrera. Simulador de grúa hidráulica para aplicaciones marinas. Ingeniería Industrial. Autor: Pedro Cobo Beltrán Tutor: Daniel Dopico Dopico Enero, 2011 Índice Grúa real Dinámica de
Proyecto de fin de carrera. Simulador de grúa hidráulica para aplicaciones marinas. Ingeniería Industrial. Autor: Pedro Cobo Beltrán Tutor: Daniel Dopico Dopico Enero, 2011 Índice Grúa real Dinámica de
UNIVERSIDAD DON BOSCO VICERRECTORÍA DE ESTUDIOS DE POSTGRADO
 UNIVERSIDAD DON BOSCO VICERRECTORÍA DE ESTUDIOS DE POSTGRADO MAESTRÍA EN MANUFACTURA INTEGRADA POR COMPUTADORA ROBÓTICA INTEGRADA A LA MANUFACTURA Catedrático: Mg Manuel Napoleón Cardona Gutiérrez GUÍA
UNIVERSIDAD DON BOSCO VICERRECTORÍA DE ESTUDIOS DE POSTGRADO MAESTRÍA EN MANUFACTURA INTEGRADA POR COMPUTADORA ROBÓTICA INTEGRADA A LA MANUFACTURA Catedrático: Mg Manuel Napoleón Cardona Gutiérrez GUÍA
PROGRAMA ANALÌTICO 2. OBJETIVOS DE LA ASIGNATURA
 PROGRAMA ANALÌTICO 1. CARACTERIZACIÓN DE LA ASIGNATURA En el presente curso se describen las principales configuraciones geométricas de los robots manipuladores, los diferentes nodos en el proceso de manipulación
PROGRAMA ANALÌTICO 1. CARACTERIZACIÓN DE LA ASIGNATURA En el presente curso se describen las principales configuraciones geométricas de los robots manipuladores, los diferentes nodos en el proceso de manipulación
Guía docente de la asignatura Sistemas Robotizados
 Guía docente de la asignatura Sistemas Robotizados Titulación: GRADO EN INGENIERÍA ELECTRÓNICA INDUSTRIAL Y AUTOMÁTICA CURSO: 2012_2013 Guía Docente 1. Datos de la asignatura Nombre Materia Módulo Sistemas
Guía docente de la asignatura Sistemas Robotizados Titulación: GRADO EN INGENIERÍA ELECTRÓNICA INDUSTRIAL Y AUTOMÁTICA CURSO: 2012_2013 Guía Docente 1. Datos de la asignatura Nombre Materia Módulo Sistemas
PROGRAMA DE CURSO. Horas de Trabajo Personal ,0 1,5 5,0. Horas de Cátedra
 Código FI2001 Nombre PROGRAMA DE CURSO Mecánica Nombre en Inglés Mechanics SCT Unidades Docentes Horas de Cátedra Horas Docencia Auxiliar Horas de Trabajo Personal 6 10 3,0 1,5 5,0 Requisitos FI1002: Sistemas
Código FI2001 Nombre PROGRAMA DE CURSO Mecánica Nombre en Inglés Mechanics SCT Unidades Docentes Horas de Cátedra Horas Docencia Auxiliar Horas de Trabajo Personal 6 10 3,0 1,5 5,0 Requisitos FI1002: Sistemas
PROGRAMA DE FÍSICA I TEORÍA
 Pág. 1/5 UNIVERSIDAD NACIONAL EXPERIMENTAL DEL TÁCHIRA VICE RECTORADO ACADÉMICO DECANATO DE DOCENCIA DEPARTAMENTO DE MATEMÁTICA Y FÍSICA PROGRAMA DE FÍSICA I TEORÍA Código: 0846203T Teoría: 4 horas/semana
Pág. 1/5 UNIVERSIDAD NACIONAL EXPERIMENTAL DEL TÁCHIRA VICE RECTORADO ACADÉMICO DECANATO DE DOCENCIA DEPARTAMENTO DE MATEMÁTICA Y FÍSICA PROGRAMA DE FÍSICA I TEORÍA Código: 0846203T Teoría: 4 horas/semana
PROYECTO DOCENTE ASIGNATURA: "Robótica" Grupo: Grupo 1(971959) Titulacion: Grado en Ingeniería de las Tecnologías de Telecomunicación Curso:
 Titulacion: Grado en Ingeniería de las Tecnologías de Telecomunicación Curso:") PROYECTO DOCENTE ASIGNATURA: "Robótica" Grupo: Grupo 1(971959) Titulacion: Grado en Ingeniería de las Tecnologías de Telecomunicación Curso: 2015-2016 DATOS BÁSICOS DE LA ASIGNATURA/GRUPO Titulación: Año
PROYECTO DOCENTE ASIGNATURA: "Robótica" Grupo: Grupo 1(971959) Titulacion: Grado en Ingeniería de las Tecnologías de Telecomunicación Curso: 2015-2016 DATOS BÁSICOS DE LA ASIGNATURA/GRUPO Titulación: Año
CAPÍTULO 1. Ecuaciones de Movimiento del Sistema
 CAPÍTULO 1 Ecuaciones de Movimiento del Sistema El sistema que se construyó y cuyo análisis es del presente capítulo tiene las siguientes constricciones: 1. El carro solo se puede desplazar en la dirección
CAPÍTULO 1 Ecuaciones de Movimiento del Sistema El sistema que se construyó y cuyo análisis es del presente capítulo tiene las siguientes constricciones: 1. El carro solo se puede desplazar en la dirección
IX. Análisis dinámico de fuerzas
 Objetivos: IX. Análisis dinámico de fuerzas 1. Comprender la diferencia entre masa y peso. 2. Comprender como calcular el momento de masa de inercia de un objeto. 3. Recordar el teorema de ejes paralelos.
Objetivos: IX. Análisis dinámico de fuerzas 1. Comprender la diferencia entre masa y peso. 2. Comprender como calcular el momento de masa de inercia de un objeto. 3. Recordar el teorema de ejes paralelos.
ASIGNATURA DE MÁSTER: ROBÓTICA INDUSTRIAL
 1.PRESENTACIÓN ASIGNATURA DE MÁSTER: ROBÓTICA INDUSTRIAL Curso 2015/2016 (Código:31104093) Esta asignatura está dedicada al estudio de los robots como elementos esenciales de la automatización de la producción.
1.PRESENTACIÓN ASIGNATURA DE MÁSTER: ROBÓTICA INDUSTRIAL Curso 2015/2016 (Código:31104093) Esta asignatura está dedicada al estudio de los robots como elementos esenciales de la automatización de la producción.
ASIGNATURA: ROBÓTICA I
 ASIGNATURA: ROBÓTICA I 1. DATOS DE LA ASIGNATURA Nombre de la asignatura: Robótica I Línea de investigación o de trabajo: Horas teoría-horas prácticas-horas trabajo adicional-horas totales-créditos 3 0
ASIGNATURA: ROBÓTICA I 1. DATOS DE LA ASIGNATURA Nombre de la asignatura: Robótica I Línea de investigación o de trabajo: Horas teoría-horas prácticas-horas trabajo adicional-horas totales-créditos 3 0
Cinemática del Robot. CI-2657 Robótica M.Sc. Kryscia Ramírez Benavides
 M.Sc. Kryscia Ramírez Benavides Sistema Robótico Cinemática Dinámica Planeamiento de Tareas Software Hardware Diseño Mecánico Actuadores Sistema de Control Sensores 2 Introducción Con el fin de controlar
M.Sc. Kryscia Ramírez Benavides Sistema Robótico Cinemática Dinámica Planeamiento de Tareas Software Hardware Diseño Mecánico Actuadores Sistema de Control Sensores 2 Introducción Con el fin de controlar
APD 1305 2-3 - 5 SATCA 1 : Carrera:
 1. Datos Generales de la asignatura Nombre de la asignatura: Clave de la asignatura: SATCA 1 : Carrera: Robótica Industrial APD 1305 2-3 - 5 Ingeniería Mecánica 2. Presentación Caracterización de la asignatura
1. Datos Generales de la asignatura Nombre de la asignatura: Clave de la asignatura: SATCA 1 : Carrera: Robótica Industrial APD 1305 2-3 - 5 Ingeniería Mecánica 2. Presentación Caracterización de la asignatura
Programa de la ITF para la Formación de Entrenadores. Biomecánica del. tenis: Conceptos y aplicaciones. Miguel Crespo Responsable de Investigación ITF
 Programa de la ITF para la Formación de Entrenadores Biomecánica del Miguel Crespo Responsable de Investigación ITF tenis: Conceptos y aplicaciones Biomecánica Definición Ciencia que estudia la adaptación
Programa de la ITF para la Formación de Entrenadores Biomecánica del Miguel Crespo Responsable de Investigación ITF tenis: Conceptos y aplicaciones Biomecánica Definición Ciencia que estudia la adaptación
Robótica Industrial. Robótica Industrial
 TEMA 4: CINEMÁTICA DEL ROBOT Ingeniería de Sistemas y Automática Control de Robots y Sistemas Sensoriales Robótica Industrial Robótica Industrial ISA.- Ingeniería de Sistemas y Automática Cinemática del
TEMA 4: CINEMÁTICA DEL ROBOT Ingeniería de Sistemas y Automática Control de Robots y Sistemas Sensoriales Robótica Industrial Robótica Industrial ISA.- Ingeniería de Sistemas y Automática Cinemática del
INTRODUCCIÓN A LA MECÁNICA DEL ROBOT. Curso de Extensión. Tema 2. Laboratorio de Robótica Aplicada (LABRA) 1
 1") Curso de Extensión INTRODUCCIÓN A LA ROBÓTICA MÓVILM (LABRA) 1 Curso de Introducción n a la Robótica MóvilM Tema 2 MECÁNICA DEL ROBOT (LABRA) 2 La Capa Física: F Diseño o Mecánico Configuración de las
Curso de Extensión INTRODUCCIÓN A LA ROBÓTICA MÓVILM (LABRA) 1 Curso de Introducción n a la Robótica MóvilM Tema 2 MECÁNICA DEL ROBOT (LABRA) 2 La Capa Física: F Diseño o Mecánico Configuración de las
Universidad Politécnica de Madrid Escuela de Ingenieros Industriales. RoboTenis
 Universidad Politécnica de Madrid Escuela de Ingenieros Industriales RoboTenis Diseño, Simulación, Análisis Cinemático y Dinámico de un robot paralelo para Control Visual de altas prestaciones DISAM Luis
Universidad Politécnica de Madrid Escuela de Ingenieros Industriales RoboTenis Diseño, Simulación, Análisis Cinemático y Dinámico de un robot paralelo para Control Visual de altas prestaciones DISAM Luis
ANÁLISIS Y CONSTRUCCIÓN DE UN MANIPULADOR DE CUATRO GRADOS DE LIBERTAD.
 ANÁLISIS Y CONSTRUCCIÓN DE UN MANIPULADOR DE CUATRO GRADOS DE LIBERTAD. L. A. Cuevas Ramírez a, I. Ramírez Vargas b, F. Cruz Hernández, b a Universidad La Salle Pachuca. Escuela de Ingeniería. Campus La
ANÁLISIS Y CONSTRUCCIÓN DE UN MANIPULADOR DE CUATRO GRADOS DE LIBERTAD. L. A. Cuevas Ramírez a, I. Ramírez Vargas b, F. Cruz Hernández, b a Universidad La Salle Pachuca. Escuela de Ingeniería. Campus La
Cinemática Directa del Robot. UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides
 Cinemática Directa del Robot UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción Consiste en determinar cual es la posición y orientación del extremo final del robot, con
Cinemática Directa del Robot UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción Consiste en determinar cual es la posición y orientación del extremo final del robot, con
Mecánica Graduado en Ingeniería Mecánica Complementos de formación Máster/Doctorado
 Información del Plan Docente Año académico 2016/17 Centro académico Titulación 110 - Escuela de Ingeniería y Arquitectura 434 - Graduado en Ingeniería Mecánica 330 - Complementos de formación Máster/Doctorado
Información del Plan Docente Año académico 2016/17 Centro académico Titulación 110 - Escuela de Ingeniería y Arquitectura 434 - Graduado en Ingeniería Mecánica 330 - Complementos de formación Máster/Doctorado
UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO FACULTAD DE INGENIERÍA PROGRAMA DE ESTUDIO
 UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO FACULTAD DE INGENIERÍA PROGRAMA DE ESTUDIO ROBÓTICA 2135 9º 10 Asignatura Clave Semestre Créditos Ingeniería Mecánica e Industrial Ingeniería Mecatrónica Ingeniería
UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO FACULTAD DE INGENIERÍA PROGRAMA DE ESTUDIO ROBÓTICA 2135 9º 10 Asignatura Clave Semestre Créditos Ingeniería Mecánica e Industrial Ingeniería Mecatrónica Ingeniería
APM SATCA: Carrera: Ingeniería Electrónica
 1. Datos Generales de la asignatura Nombre de la asignatura: Clave de la asignatura: SATCA: Robótica Industrial APM-1301 2-4 - 6 Carrera: Ingeniería Electrónica 2. Presentación Caracterización de la asignatura
1. Datos Generales de la asignatura Nombre de la asignatura: Clave de la asignatura: SATCA: Robótica Industrial APM-1301 2-4 - 6 Carrera: Ingeniería Electrónica 2. Presentación Caracterización de la asignatura
SIMULADOR DE COMPORTAMIENTO CINEMÁTICO DE ROBOTS MANIPULADORES UTILIZANDO MATLAB
 SIMULADOR DE COMPORTAMIENTO CINEMÁTICO DE ROBOTS MANIPULADORES UTILIZANDO MATLAB Enrique Cuan Duron a, Arnoldo Fernández Ramírez b, Elisa Urquizo Barraza a, Roxana García Andrade b,a División de Estudios
SIMULADOR DE COMPORTAMIENTO CINEMÁTICO DE ROBOTS MANIPULADORES UTILIZANDO MATLAB Enrique Cuan Duron a, Arnoldo Fernández Ramírez b, Elisa Urquizo Barraza a, Roxana García Andrade b,a División de Estudios
UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO FACULTAD DE ESTUDIOS SUPERIORES CUAUTITLÁN LICENCIATURA: INGENIERÍA MECÁNICA ELÉCTRICA
 UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO FACULTAD DE ESTUDIOS SUPERIORES CUAUTITLÁN LICENCIATURA: INGENIERÍA MECÁNICA ELÉCTRICA PROGRAMA DE LA ASIGNATURA DE: Teoría de Control y Robótica IDENTIFICACIÓN
UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO FACULTAD DE ESTUDIOS SUPERIORES CUAUTITLÁN LICENCIATURA: INGENIERÍA MECÁNICA ELÉCTRICA PROGRAMA DE LA ASIGNATURA DE: Teoría de Control y Robótica IDENTIFICACIÓN
CINEMÁTICA INVERSA DE ROBOTS INDUSTRIALES
 I EMETRE DE 00 CINEMÁTICA INVERA DE ROBOT INDUTRIALE GERMÁN ANDRÉ RAMO FUENTE * 1. Introducción El uso de robots en ambientes industriales, y más precisamente en procesos de manufactura, ha generado toda
I EMETRE DE 00 CINEMÁTICA INVERA DE ROBOT INDUTRIALE GERMÁN ANDRÉ RAMO FUENTE * 1. Introducción El uso de robots en ambientes industriales, y más precisamente en procesos de manufactura, ha generado toda
Introducción a la Robótica Móvil
 Introducción a la Robótica Móvil Segundo cuatrimestre de 2016 Departamento de Computación - FCEyN - UBA Teórica - clase 10 Sensado con LASER e IMU Sensado Qué sensores vimos hasta ahora? Sensor de contacto
Introducción a la Robótica Móvil Segundo cuatrimestre de 2016 Departamento de Computación - FCEyN - UBA Teórica - clase 10 Sensado con LASER e IMU Sensado Qué sensores vimos hasta ahora? Sensor de contacto
TEMA 4. Geometría, cinemática y dinámica
 TEMA 4. Geometría, cinemática y dinámica 76 Índice: Geometría, cinemática y dinámica Geometría oordenadas propias y del mundo Representación de la posición. Tipos de coordenadas Matrices de rotación Representación
TEMA 4. Geometría, cinemática y dinámica 76 Índice: Geometría, cinemática y dinámica Geometría oordenadas propias y del mundo Representación de la posición. Tipos de coordenadas Matrices de rotación Representación
Sistema de Co-Simulación de un Robot Industrial para Control
 22 Sistema de Co-Simulación de un Robot Industrial para Control GUDIÑO-LAU, Jorge*, CHÁVEZ-MONTEJANO, Fidel, MÉNDEZ, Alan y HERNÁNDEZ, Adrian. Recibido Octubre 28, 2016; Aceptado Diciembre 16, 2016 Resumen
22 Sistema de Co-Simulación de un Robot Industrial para Control GUDIÑO-LAU, Jorge*, CHÁVEZ-MONTEJANO, Fidel, MÉNDEZ, Alan y HERNÁNDEZ, Adrian. Recibido Octubre 28, 2016; Aceptado Diciembre 16, 2016 Resumen
Magnitudes y Unidades. Cálculo Vectorial.
 Magnitudes y Unidades. Cálculo Vectorial. 1. Se tiene las expresiones siguientes, x es posición en el eje X, en m, v la velocidad en m/s y t el tiempo transcurrido, en s. Cuáles son las dimensiones y unidades
Magnitudes y Unidades. Cálculo Vectorial. 1. Se tiene las expresiones siguientes, x es posición en el eje X, en m, v la velocidad en m/s y t el tiempo transcurrido, en s. Cuáles son las dimensiones y unidades
Universidad Nacional de Ingeniería - Facultad de Ingeniería Mecánica Departamento Académico de Ingeniería Aplicada
 Universidad Nacional de Ingeniería - Facultad de Ingeniería Mecánica Departamento Académico de Ingeniería Aplicada CONTROL MODERNO Y ÓPTIMO (MT 7C) Clase-b Elizabeth Villota Cerna Semestre II - UNI 8/9/.3.
Universidad Nacional de Ingeniería - Facultad de Ingeniería Mecánica Departamento Académico de Ingeniería Aplicada CONTROL MODERNO Y ÓPTIMO (MT 7C) Clase-b Elizabeth Villota Cerna Semestre II - UNI 8/9/.3.
Locomoción. V. Angelica García Vega
 Locomoción Locomoción Tracción y odometría rotación r Eje y En el caso de una rueda ideal de radio r que gira libremente, la distancia que recorre en un giro está dado por 2πr. Eje x Movimiento en z Eje
Locomoción Locomoción Tracción y odometría rotación r Eje y En el caso de una rueda ideal de radio r que gira libremente, la distancia que recorre en un giro está dado por 2πr. Eje x Movimiento en z Eje
Control visual de sistemas robóticos remotos
 Control visual de sistemas robóticos remotos Reporte Técnico noviembre 2004 junio 2005 Rafael Kelly CICESE Marco A. Artega UNAM 1 Objetivos El objetivo primario de este proyecto es la control de sistemas
Control visual de sistemas robóticos remotos Reporte Técnico noviembre 2004 junio 2005 Rafael Kelly CICESE Marco A. Artega UNAM 1 Objetivos El objetivo primario de este proyecto es la control de sistemas
Visión artificial y Robótica Modelos de movimiento y mapas. Depto. de Ciencia de la Computación e Inteligencia Artificial
 Visión artificial y Robótica Modelos de movimiento y mapas Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Sistemas de coordenadas Localización de objetos en el espacio Modelos
Visión artificial y Robótica Modelos de movimiento y mapas Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Sistemas de coordenadas Localización de objetos en el espacio Modelos
Robótica MTF-1025 SATCA: Carrera:
 1. Datos Generales de la asignatura Nombre de la asignatura: Clave de la asignatura: SATCA: Carrera: Robótica MTF-1025 3-2 - 5 Ingeniería Mecatrónica 2. Presentación Caracterización de la asignatura Esta
1. Datos Generales de la asignatura Nombre de la asignatura: Clave de la asignatura: SATCA: Carrera: Robótica MTF-1025 3-2 - 5 Ingeniería Mecatrónica 2. Presentación Caracterización de la asignatura Esta
Cinemática Directa del Robot. CI-2657 Robótica M.Sc. Kryscia Ramírez Benavides
 M.Sc. Kryscia Ramírez Benavides Introducción Consiste en determinar cual es la posición y orientación del extremo final del robot, con respecto a un sistema de coordenadas que se toma como referencia,
M.Sc. Kryscia Ramírez Benavides Introducción Consiste en determinar cual es la posición y orientación del extremo final del robot, con respecto a un sistema de coordenadas que se toma como referencia,
Control de un Robot Scara de 3 GDL
 Control de un Robot Scara de 3 GDL Jesús Soldevilla ureta Raúl Rivas Jimenez 13 de diciembre de 2010 Resumen El proyecto que se desarrolla en el siguiente informe plantea la aplicación de 4 técnicas de
Control de un Robot Scara de 3 GDL Jesús Soldevilla ureta Raúl Rivas Jimenez 13 de diciembre de 2010 Resumen El proyecto que se desarrolla en el siguiente informe plantea la aplicación de 4 técnicas de
Problema Cinemático Directo
 Problema Cinemático Directo Parámetros Denavit-Hartenberg Denavit-Hartenberg notación Craig Denavit-Hartenberg notación Craig Denavit-Hartenberg notación Craig Denavit-Hartenberg notación Craig Denavit-Hartenberg
Problema Cinemático Directo Parámetros Denavit-Hartenberg Denavit-Hartenberg notación Craig Denavit-Hartenberg notación Craig Denavit-Hartenberg notación Craig Denavit-Hartenberg notación Craig Denavit-Hartenberg
Índice. Control PID Control PID con compensación de la gravedad Control PID con compensación por adelanto Planificación de ganancias
 CONTROL DE ROBOTS Índice Qué es el control de robots? Reductores: Control monoarticular: Control PID Control PID con compensación de la gravedad Control PID con compensación por adelanto Planificación
CONTROL DE ROBOTS Índice Qué es el control de robots? Reductores: Control monoarticular: Control PID Control PID con compensación de la gravedad Control PID con compensación por adelanto Planificación
Visión artificial y Robótica Geometría. Depto. de Ciencia de la Computación e Inteligencia Artificial
 Visión artificial y Robótica Geometría Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Geometría 2D y 3D Transformación de coordenadas Calibración de la cámara Álgebra necesaria
Visión artificial y Robótica Geometría Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Geometría 2D y 3D Transformación de coordenadas Calibración de la cámara Álgebra necesaria
Análisis de Plataforma Sewart utilizando SimMechanics Aplicada al Desarrollo de Simuladores de Vuelo.
 Análisis de Plataforma Sewart utilizando SimMechanics Aplicada al Desarrollo de Simuladores de Vuelo. Griselda I. Cistac [1] -Aníbal Zanini [2] - Horacio Abbate [3] Facultad de Ingeniería-UNLPam [1] -
Análisis de Plataforma Sewart utilizando SimMechanics Aplicada al Desarrollo de Simuladores de Vuelo. Griselda I. Cistac [1] -Aníbal Zanini [2] - Horacio Abbate [3] Facultad de Ingeniería-UNLPam [1] -
Mecánica Aplicada. Dinámica
 Mecánica Aplicada Dinámica PROYECTO EDITORIAL SÍNTESIS INGENIERÍA Áreas de Publicación INGENIERÍA INDUSTRIAL COORDINADORA: Alicia Larena Mecánica Aplicada Dinámica Armando Bilbao Enrique Amezua Óscar Altuzarra
Mecánica Aplicada Dinámica PROYECTO EDITORIAL SÍNTESIS INGENIERÍA Áreas de Publicación INGENIERÍA INDUSTRIAL COORDINADORA: Alicia Larena Mecánica Aplicada Dinámica Armando Bilbao Enrique Amezua Óscar Altuzarra
UN robot paralelo es un mecanismo compuesto por
 Una nueva Metodología para la Solución de la Cinemática del Robot Paralelo Delta Manuel Cardona. Member IEEE Facultad de Ingeniería y CCNN, Universidad de Sonsonate, El Salvador, C.A manuel.cardona@ieee.org
Una nueva Metodología para la Solución de la Cinemática del Robot Paralelo Delta Manuel Cardona. Member IEEE Facultad de Ingeniería y CCNN, Universidad de Sonsonate, El Salvador, C.A manuel.cardona@ieee.org
Universidad de Valladolid. Control y Programación de Robots. Morfología del robot: E.T.S. de Ingenieros Industriales. Estructura mecánica
 Universidad de Valladolid E.T.S. de Ingenieros Industriales Control y Programación de Robots Morfología del robot: Estructura mecánica Morfología del robot Un robot está formado por los siguientes elementos:
Universidad de Valladolid E.T.S. de Ingenieros Industriales Control y Programación de Robots Morfología del robot: Estructura mecánica Morfología del robot Un robot está formado por los siguientes elementos:
Enfoque práctico de la teoría de robots Con aplicaciones en Matlab
 Enfoque práctico de la teoría de robots Con aplicaciones en Matlab Enrique Luis Arnaez Braschi Enfoque práctico de la teoría de robots Con aplicaciones en Matlab Enrique Arnaez Braschi Lima, mayo de 2015
Enfoque práctico de la teoría de robots Con aplicaciones en Matlab Enrique Luis Arnaez Braschi Enfoque práctico de la teoría de robots Con aplicaciones en Matlab Enrique Arnaez Braschi Lima, mayo de 2015
Control de un Robot planar de 2 GDL
 Control de un Robot planar de 2 GDL América Morales.-César Cortés.-César Tolentino.-Mario Méndez.- Fernando Coronado Robótica y Manufactura Avanzada-CINVESTAV, Saltillo México. Abstract En este reporte
Control de un Robot planar de 2 GDL América Morales.-César Cortés.-César Tolentino.-Mario Méndez.- Fernando Coronado Robótica y Manufactura Avanzada-CINVESTAV, Saltillo México. Abstract En este reporte
UNIVERSIDAD RICARDO PALMA FACULTAD DE INGENIERÍA ESCUELA ACADÉMICO PROFESIONAL DE INGENIERÍA ELECTRÓNICA SÍLABO PLAN DE ESTUDIOS 2006-II
 UNIVERSIDAD RICARDO PALMA FACULTAD DE INGENIERÍA ESCUELA ACADÉMICO PROFESIONAL DE INGENIERÍA ELECTRÓNICA SÍLABO PLAN DE ESTUDIOS 2006-II I. DATOS GENERALES Asignatura : Sistemas Expertos y Robótica Área
UNIVERSIDAD RICARDO PALMA FACULTAD DE INGENIERÍA ESCUELA ACADÉMICO PROFESIONAL DE INGENIERÍA ELECTRÓNICA SÍLABO PLAN DE ESTUDIOS 2006-II I. DATOS GENERALES Asignatura : Sistemas Expertos y Robótica Área
TECNOLÓGICO DE ESTUDIOS SUPERIORES DE ECATEPEC
 TECNOLÓGICO DE ESTUDIOS SUPERIORES DE ECATEPEC DIVISIÓN DE INGENIERÍA ELECTRÓNICA Y TELEMÁTICA PRÁCTICAS DE LABORATORIO ASIGNATURA: ROBÓTICA I REALIZÓ: GERARDO PAZOS RODRÍGUEZ PRESENTACIÓN El presente
TECNOLÓGICO DE ESTUDIOS SUPERIORES DE ECATEPEC DIVISIÓN DE INGENIERÍA ELECTRÓNICA Y TELEMÁTICA PRÁCTICAS DE LABORATORIO ASIGNATURA: ROBÓTICA I REALIZÓ: GERARDO PAZOS RODRÍGUEZ PRESENTACIÓN El presente
Examen de TEORIA DE MAQUINAS Diciembre 12 Nombre...
 Examen de TEORIA DE MAQUINAS Diciembre 12 Nombre... El mecanismo de la figura es un cuadrilátero articulado manivela-balancín. La distancia entre los puntos fijos A y D es 4L/ 3. En la mitad del balancín
Examen de TEORIA DE MAQUINAS Diciembre 12 Nombre... El mecanismo de la figura es un cuadrilátero articulado manivela-balancín. La distancia entre los puntos fijos A y D es 4L/ 3. En la mitad del balancín
Capítulo 6: Modelo de robot:
 Capítulo 6: Modelo de robot: 1. Descripción del modelo monociclo Un modelo cinemático aportará las bases necesarias para describir el movimiento de un móvil en función de la velocidad y aceleración del
Capítulo 6: Modelo de robot: 1. Descripción del modelo monociclo Un modelo cinemático aportará las bases necesarias para describir el movimiento de un móvil en función de la velocidad y aceleración del
SISTEMAS ROBOTIZADOS Asignatura optativa
 Área de Ingeniería de Sistemas y Automática Departamento de Lenguajes y Computación Universidad de Almería SISTEMAS ROBOTIZADOS Asignatura optativa PRACTICA 4 CONTROL DE ROBOTS MÓVILES UTILIZANDO EL MÉTODO
Área de Ingeniería de Sistemas y Automática Departamento de Lenguajes y Computación Universidad de Almería SISTEMAS ROBOTIZADOS Asignatura optativa PRACTICA 4 CONTROL DE ROBOTS MÓVILES UTILIZANDO EL MÉTODO
Interfaz de control cinemático para el humanoide HOAP-3 en Matlab para el cálculo off-line de trayectorias
 Universidad Carlos III de Madrid Repositorio institucional e-archivo Trabajos académicos http://e-archivo.uc3m.es Proyectos Fin de Carrera 2012-03 Interfaz de control cinemático para el humanoide HOAP-3
Universidad Carlos III de Madrid Repositorio institucional e-archivo Trabajos académicos http://e-archivo.uc3m.es Proyectos Fin de Carrera 2012-03 Interfaz de control cinemático para el humanoide HOAP-3
Estudio cinemático y dinámico de un robot dedicado a la reparación de. fallas menores en tuberías hidrosanitarias
 Estudio cinemático y dinámico de un robot dedicado a la reparación de fallas menores en tuberías hidrosanitarias Una Tesis Presentada Para Obtener El Título De Ingeniero en Mecatrónica Universidad Militar
Estudio cinemático y dinámico de un robot dedicado a la reparación de fallas menores en tuberías hidrosanitarias Una Tesis Presentada Para Obtener El Título De Ingeniero en Mecatrónica Universidad Militar
TSTC. Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 2 CINEMÁTICA DE MANIPULADORES
 Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 2 CINEMÁTICA DE MANIPULADORES Secciones 1. Introducción. 2. Coordenadas y Transformaciones Homogéneas. 3. Problema Cinemático Directo. Método de
Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 2 CINEMÁTICA DE MANIPULADORES Secciones 1. Introducción. 2. Coordenadas y Transformaciones Homogéneas. 3. Problema Cinemático Directo. Método de
Una Nueva Formulación de la Mecánica Clásica
 Una Nueva Formulación de la Mecánica Clásica Alejandro A. Torassa Buenos Aires, Argentina, E-mail: atorassa@gmail.com Licencia Creative Commons Atribución 3.0 (Copyright 2009) Resumen. Este trabajo expone
Una Nueva Formulación de la Mecánica Clásica Alejandro A. Torassa Buenos Aires, Argentina, E-mail: atorassa@gmail.com Licencia Creative Commons Atribución 3.0 (Copyright 2009) Resumen. Este trabajo expone