PUNTOS A CHEQUEAR ANTES DE PONER EN MARCHA EL SERVODRIVER. REVISION DEL CABLEADO DE LAS SEÑALES DE ALIMENTACION.
|
|
|
- María Soledad Palma Vargas
- hace 8 años
- Vistas:
Transcripción
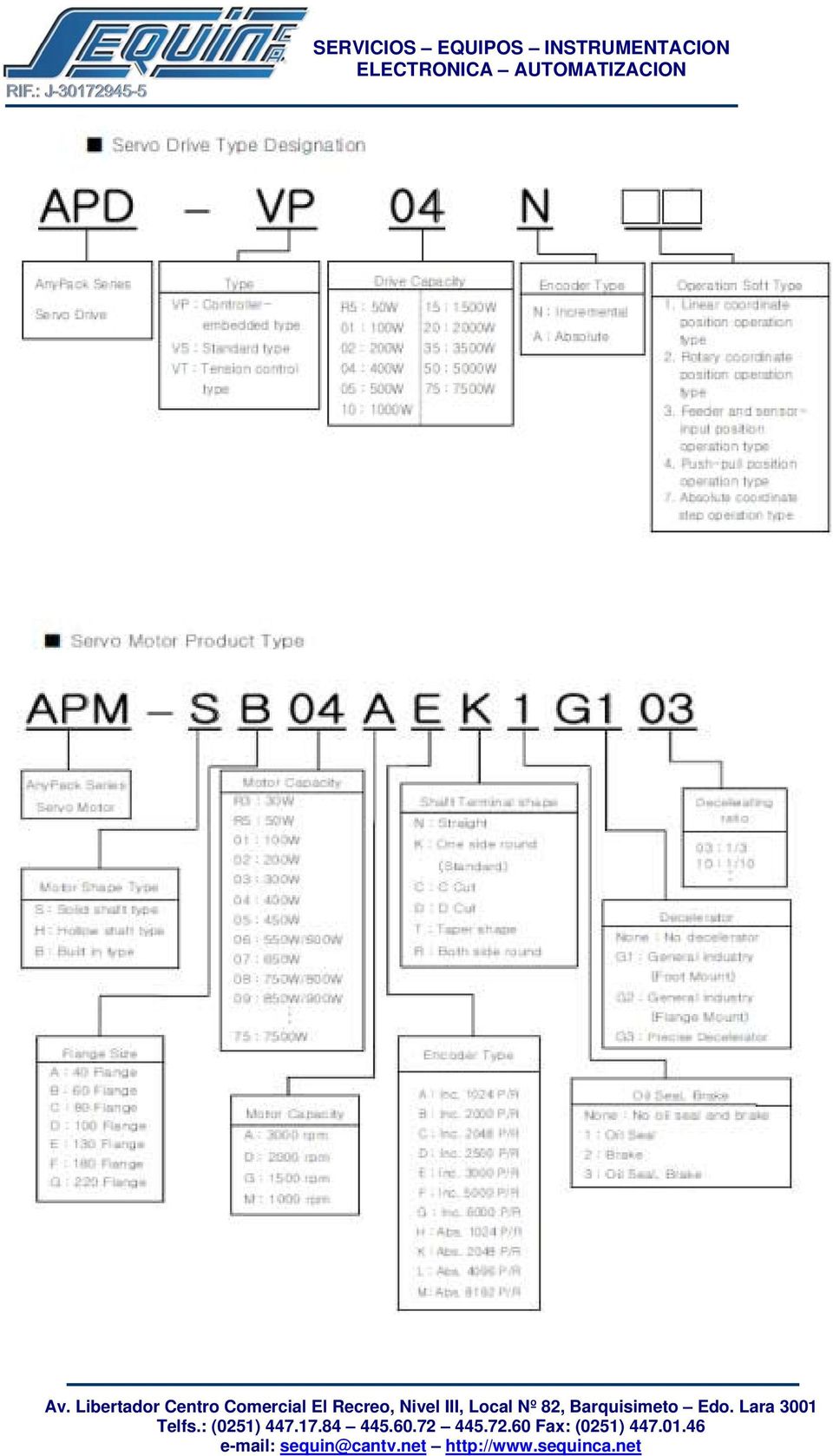
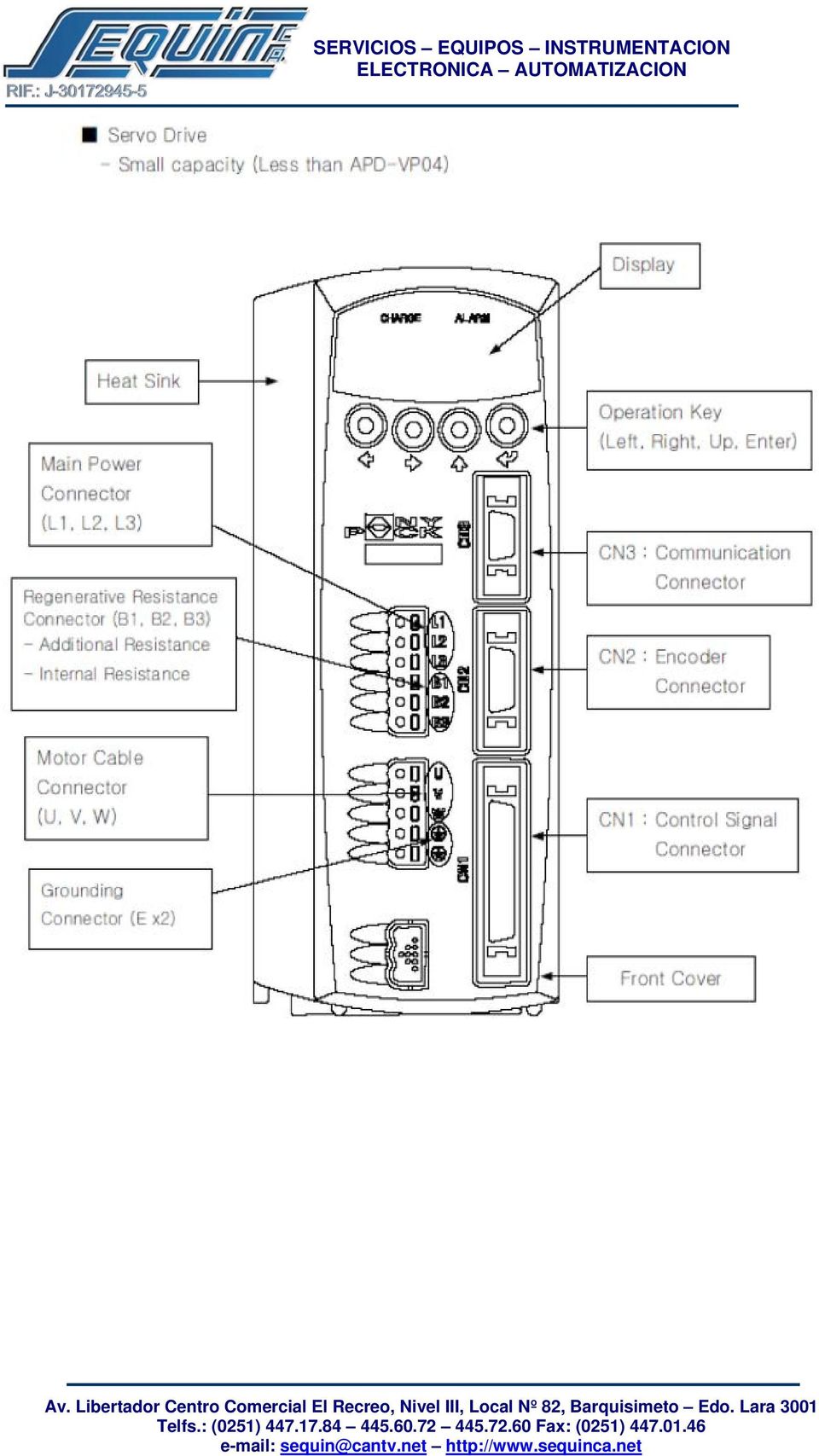
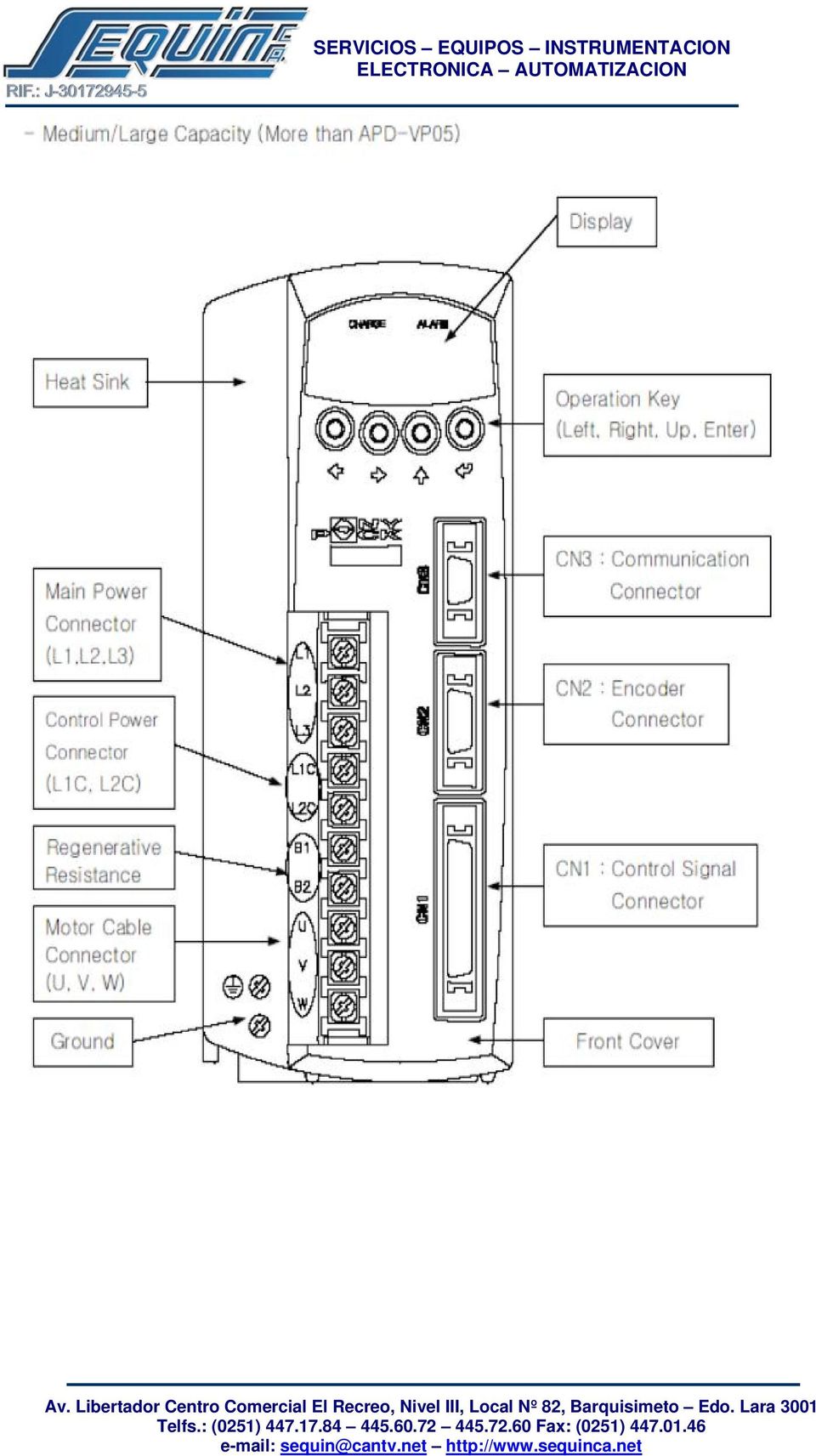
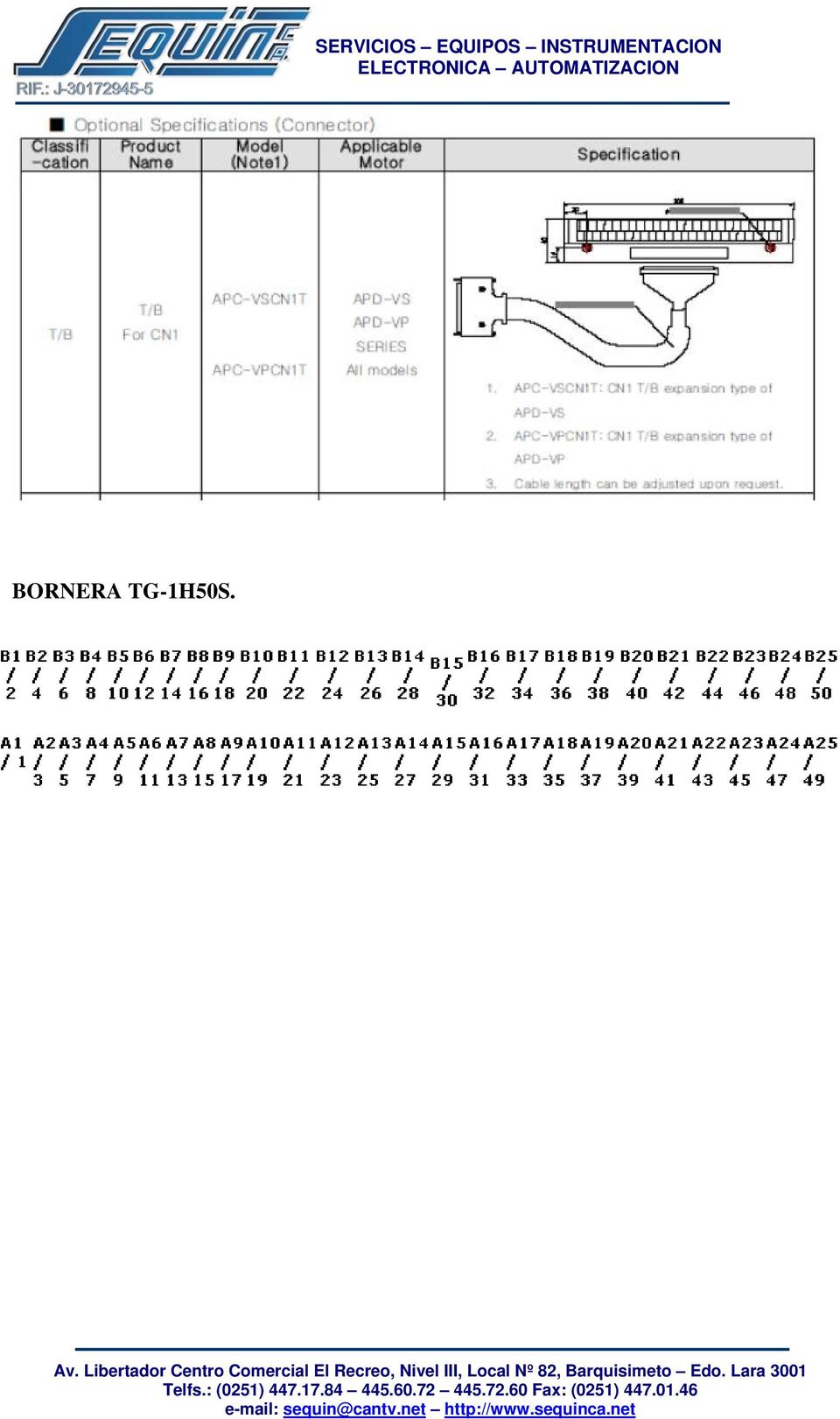
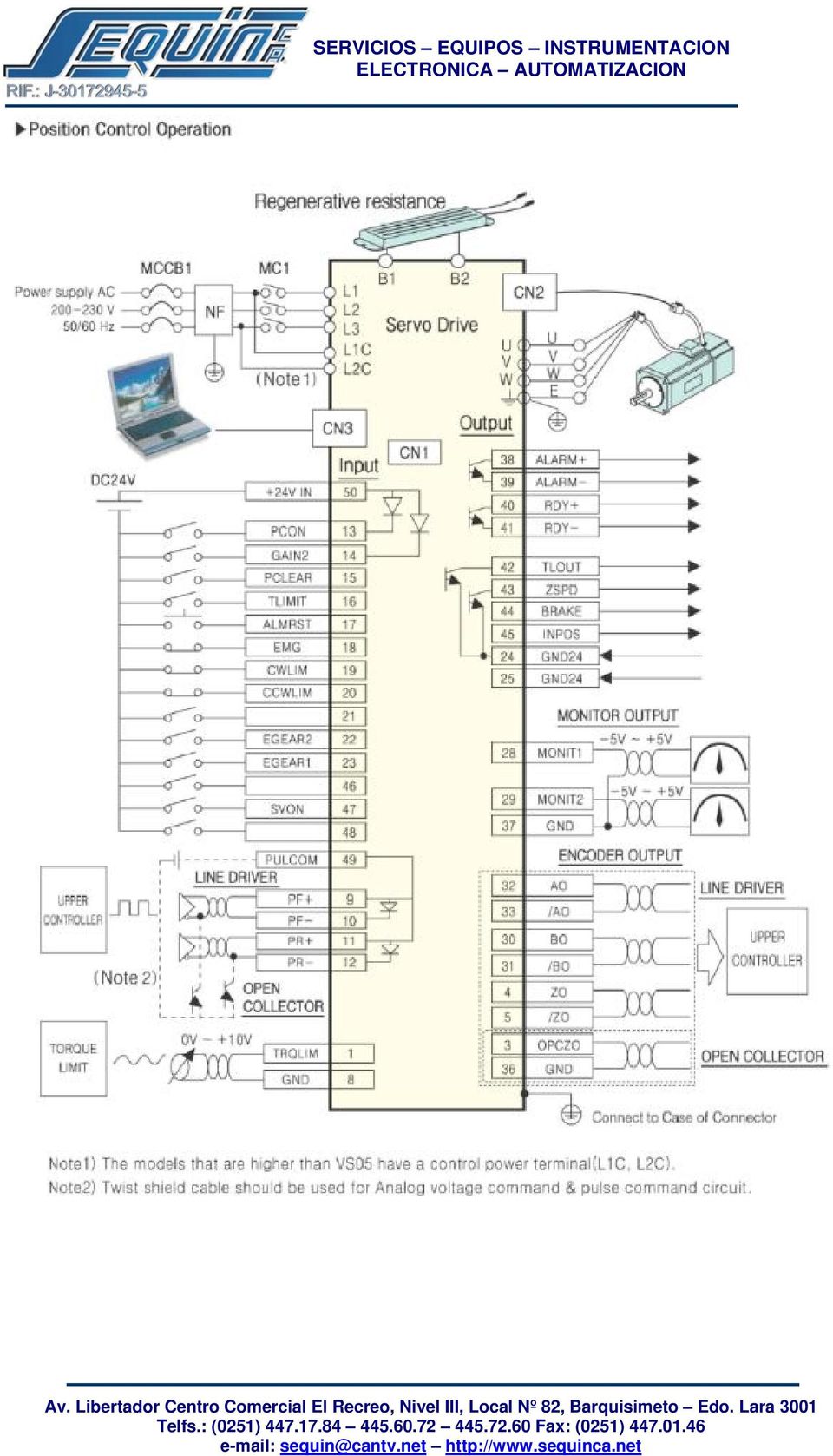
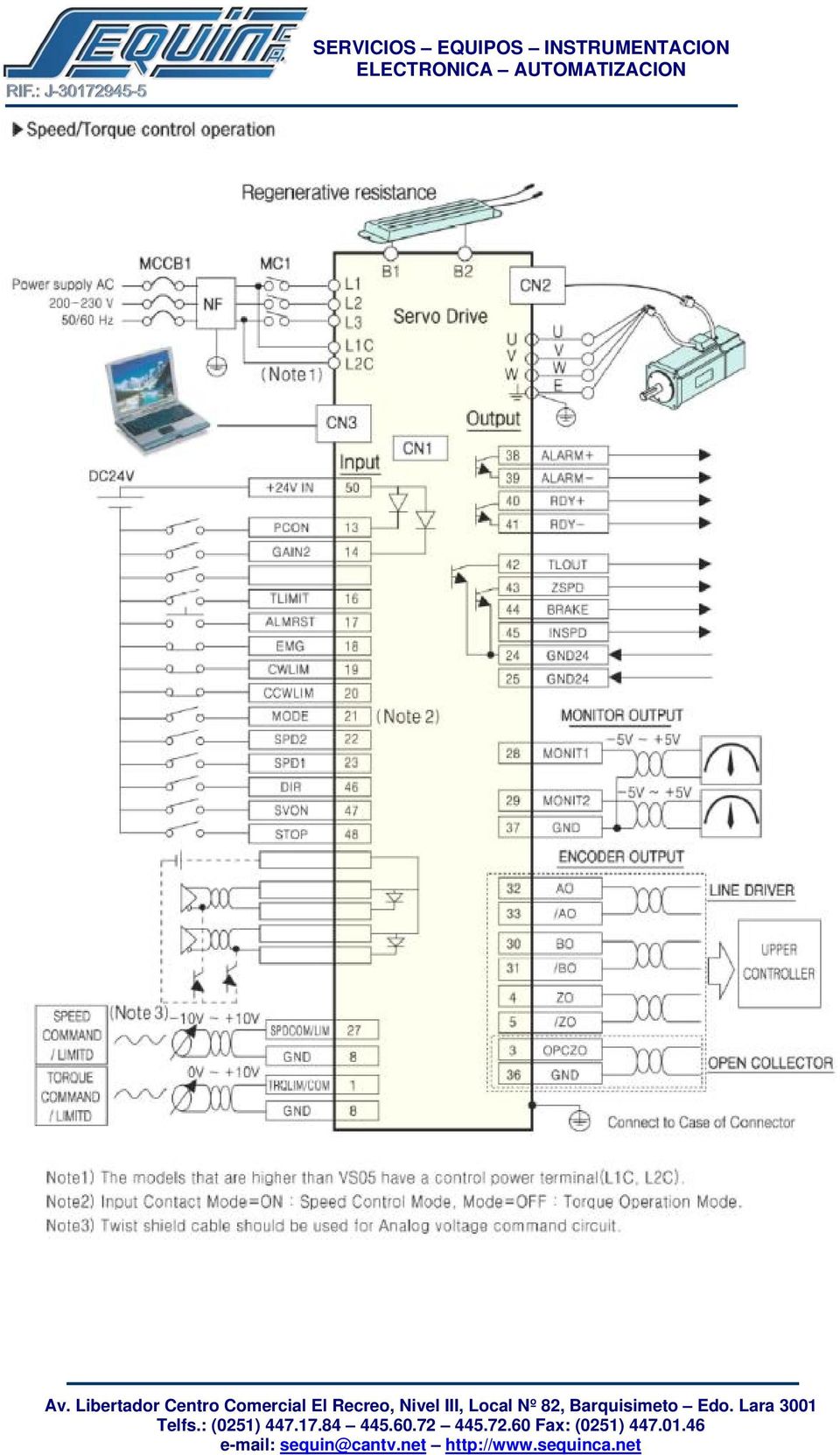
1 PUNTOS A CHEQUEAR ANTES DE PONER EN MARCHA EL SERVODRIVER. REVISION DEL CABLEADO DE LAS SEÑALES DE ALIMENTACION. o o Chequear si la alimentación esta en el voltaje correcto (200V AC). Chequear si la conexión U, V, W, GND entre el servo drive y el motor es correcta. o Chequear si la señal de control está correctamente conectada a 24V. o o Chequear si la resistencia regenerativa es del modelo acorde para la capacidad del servo drive. Chequear si la señal de GND y el apantallado del cable están bien conectados. REVISION DEL CABLEADO DE LAS SEÑALES DE OPERACIÓN (CN1). Asegúrese de que el estado del cableado y los contactos de las señales de operación, estén como se indica en la siguiente tabla: Pin No. Nombre del pin Estado del contacto 13/A7 PCON OFF 18/B9 EMG ON 19/A10 CWLIM ON 20/B10 CCWLIM ON 47/A24 SVON OFF 48/B24 STOP OFF REVISION DE LOS PARAMETROS DEL MENU. o Chequear si el parámetro de IDENTIFICACIÓN DEL MOTOR / MOTOR ID (PE-201) está acorde con el motor conectado al servo drive. o Chequear si el parámetro de PULSOS DE ENCODER / ENCODER PULSE (PE-204) está acorde con el motor conectado al servo drive. o Chequear si el parámetro de LOGICA DE PULSOS DE ENTRADA / INPUT PULSE LOGIC (PE-701) está acorde con la aplicación requerida.
. Asegúrese de que el estado del cableado y los contactos de las señales de operación, estén como se indica en la siguiente tabla: Pin No.")
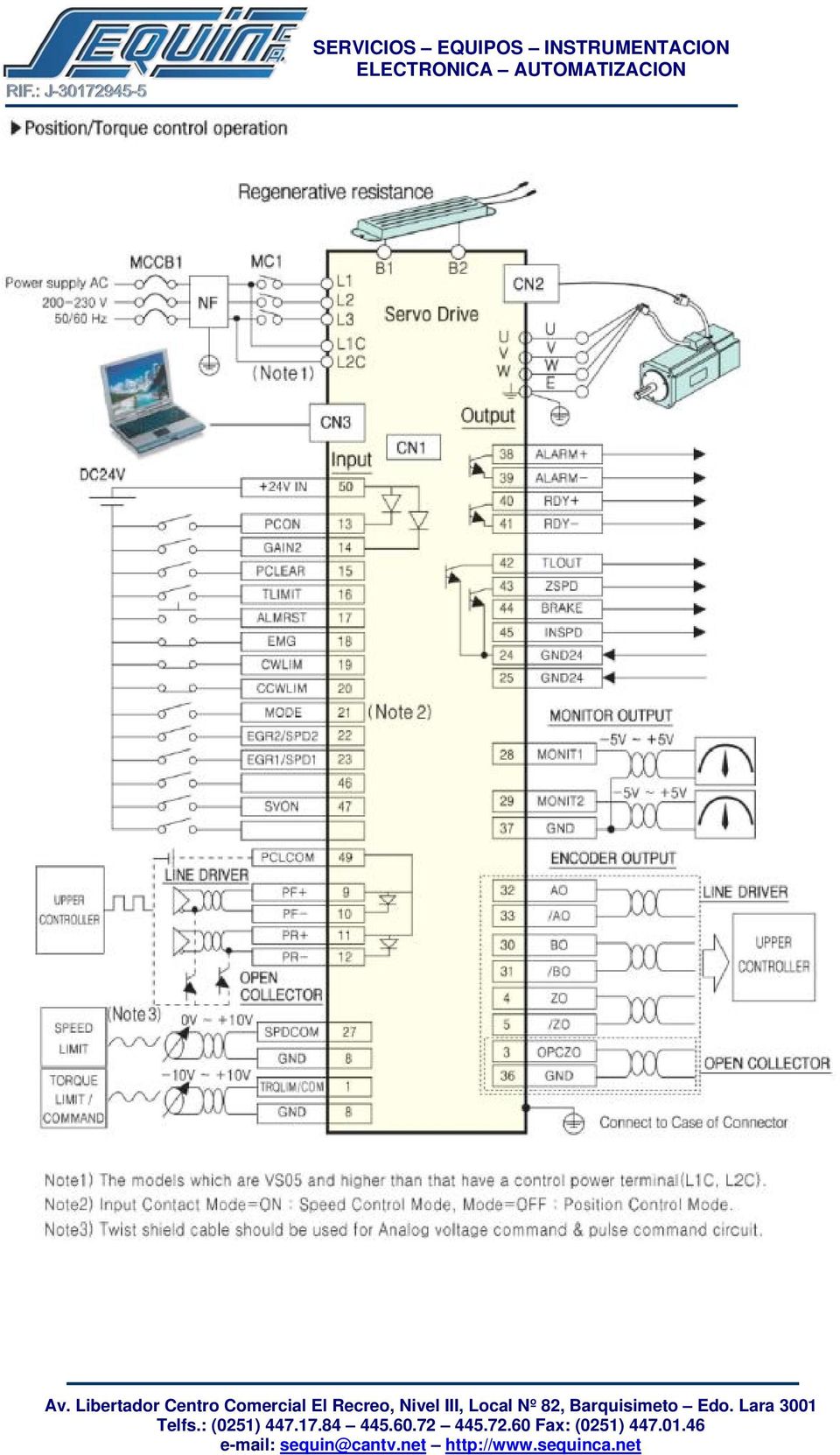
2 o Chequear si el parámetro de RELACION DE ENGRANAJE / ELECTRONIC GEAR RATIO (PE-702) está acorde con la aplicación requerida. CABLE DE COMUNICACIÓN PC-SERVO DRIVER A TRAVES DE RS232. Longitud del cable: 1, 2, 3, 4, 5 metros.

3
4

5
6
7 BORNERA TG-1H50S.
8
9
10
11
12
13
Datos técnicos del módulo de entradas/salidas digitales V DC SM 1223
 Datos técnicos del módulo de entradas/salidas digitales V DC Datos técnicos del módulo de entradas/salidas digitales V DC Tabla 1 Especificaciones generales Modelo DQ 8 x relé DQ 8 x 24 V DC Referencia
Datos técnicos del módulo de entradas/salidas digitales V DC Datos técnicos del módulo de entradas/salidas digitales V DC Tabla 1 Especificaciones generales Modelo DQ 8 x relé DQ 8 x 24 V DC Referencia
Lexium 05 Conexionado del equipo
 Lexium 05 Conexionado del equipo Vista general www.infoplc.net Conexiones de señal Conexiones de potencia Lexium 05 2 Conexiones de potencia Las conexiones de potencia difieren en función de las tallas
Lexium 05 Conexionado del equipo Vista general www.infoplc.net Conexiones de señal Conexiones de potencia Lexium 05 2 Conexiones de potencia Las conexiones de potencia difieren en función de las tallas
Manual de usuario. de DBP-3.1Nm-encod-1000ppr-KT-A Motor paso a paso lazo cerrado Versión
 Manual de usuario de DBP-3.1Nm-encod-1000ppr-KT-A Motor paso a paso lazo cerrado Versión 1.0 2018 Cualquier máquina-herramienta es potencialmente peligrosa. Las máquinas controladas por un ordenador son
Manual de usuario de DBP-3.1Nm-encod-1000ppr-KT-A Motor paso a paso lazo cerrado Versión 1.0 2018 Cualquier máquina-herramienta es potencialmente peligrosa. Las máquinas controladas por un ordenador son
Controladora de 3 ejes con Control Manual. M-TB3DV-N
 Controladora de 3 ejes con Control Manual. M-TB3DV-N Prestaciones generales: - Diseño de uso profesional con proceso de señal de dos fases. - Máximo de de control de corriente de 3.5A para motores de hasta
Controladora de 3 ejes con Control Manual. M-TB3DV-N Prestaciones generales: - Diseño de uso profesional con proceso de señal de dos fases. - Máximo de de control de corriente de 3.5A para motores de hasta
GUIA DE CONEXIÓN DEL RELOJ B1 AL COMPUTADOR Y MANUAL DE INSTALACIÓN RELOJ B1
 GUIA DE CONEXIÓN DEL RELOJ B1 AL COMPUTADOR Y MANUAL DE INSTALACIÓN RELOJ B1 1. Seleccione primero el tipo de conexión que tendrá el reloj con el computador, las opciones son: Conector para RS232 y RS485
GUIA DE CONEXIÓN DEL RELOJ B1 AL COMPUTADOR Y MANUAL DE INSTALACIÓN RELOJ B1 1. Seleccione primero el tipo de conexión que tendrá el reloj con el computador, las opciones son: Conector para RS232 y RS485
V 1.0. Ing. Juan C. Guarnizo B.
 V 1.0 Ing. Juan C. Guarnizo B. INTRODUCCIÓN... 3 DESCRIPCIÓN... 4 1. Entrada de voltaje de 5.5 V a 36 V... 4 2. Regulador a 5 V... 4 3. Borneras de salida para los motores... 5 4. Pines de control... 5
V 1.0 Ing. Juan C. Guarnizo B. INTRODUCCIÓN... 3 DESCRIPCIÓN... 4 1. Entrada de voltaje de 5.5 V a 36 V... 4 2. Regulador a 5 V... 4 3. Borneras de salida para los motores... 5 4. Pines de control... 5
Motor Paso a Paso Stepper Unipolar
 Motor Paso a Paso Stepper Unipolar ELECTRONICA SMD electronicasmd.com 1 Introducción Un motor paso a paso es un dispositivo electromecánico que convierte los impulsos eléctricos en los movimientos mecánicos
Motor Paso a Paso Stepper Unipolar ELECTRONICA SMD electronicasmd.com 1 Introducción Un motor paso a paso es un dispositivo electromecánico que convierte los impulsos eléctricos en los movimientos mecánicos
Motor Paso a Paso Stepper Unipolar
 ABC PROYECTOS ELECTRÓNICOS ABCelectronica.net 1 Motor Paso a Paso Stepper Unipolar Introducción Un motor paso a paso es un dispositivo electromecánico que convierte los impulsos eléctricos en los movimientos
ABC PROYECTOS ELECTRÓNICOS ABCelectronica.net 1 Motor Paso a Paso Stepper Unipolar Introducción Un motor paso a paso es un dispositivo electromecánico que convierte los impulsos eléctricos en los movimientos
Elementos que Influyen en el Dimensionamiento: Inercia, Carga, Par y Velocidad. Herramientas y Aplicación Ejemplo
 Elementos que Influyen en el Dimensionamiento: Inercia, Carga, Par y Velocidad. Herramientas y Aplicación Ejemplo Panasonic Electric Works España Motion Control Agenda Definición de inercia y ejemplos
Elementos que Influyen en el Dimensionamiento: Inercia, Carga, Par y Velocidad. Herramientas y Aplicación Ejemplo Panasonic Electric Works España Motion Control Agenda Definición de inercia y ejemplos
Manual de Usuario CTAD3E4S. Módulo de Control Entrada-Salida basado en microcontrolador y comunicación RS232
 Manual de Usuario Módulo de Control Entrada-Salida basado en microcontrolador y comunicación RS232 LipSoft Electronics Controlador 3E/4S 1. INTRODUCCIÓN es un sistema electrónico diseñado como sistema
Manual de Usuario Módulo de Control Entrada-Salida basado en microcontrolador y comunicación RS232 LipSoft Electronics Controlador 3E/4S 1. INTRODUCCIÓN es un sistema electrónico diseñado como sistema
Manual de Reparación v1.0
 Manual de Reparación v1.0 Familia de Modelos Contenido: -Generación del pulso de Reset -Sistema de Control en Standby -Conmutación de la alimentación para los amplificadores de potencia -Protección por
Manual de Reparación v1.0 Familia de Modelos Contenido: -Generación del pulso de Reset -Sistema de Control en Standby -Conmutación de la alimentación para los amplificadores de potencia -Protección por
OpenDomo Services ODControl accessories AI 4..20
 Características 8 puertos analógicos de entrada bucle de corriente (current loop) de 4..20mA. Alimentación del sensor configurable entre 12 y 24V CC mediante micro interruptores. Conexión rápida con ODControl
Características 8 puertos analógicos de entrada bucle de corriente (current loop) de 4..20mA. Alimentación del sensor configurable entre 12 y 24V CC mediante micro interruptores. Conexión rápida con ODControl
SUPER CONTROLADOR DE SERVOS S310175
 SUPER CONTROLADOR DE SERVOS S310175 Controlador para servos con retroalimentación del par motor No es necesario realizar modificaciones a los servos Características: Sus ocho salidas independientes de
SUPER CONTROLADOR DE SERVOS S310175 Controlador para servos con retroalimentación del par motor No es necesario realizar modificaciones a los servos Características: Sus ocho salidas independientes de
VELOCIDAD Y POSICIONAMIENTO CON EL FATEK SERIE FBS
 VELOCIDAD Y POSICIONAMIENTO CON EL FATEK SERIE FBS Descripción: Control de velocidad, dirección y posición, de un SERVO MOTOR, realizado por un PLC, a través de un SERVO DRIVER. En la tabla 1 se muestran
VELOCIDAD Y POSICIONAMIENTO CON EL FATEK SERIE FBS Descripción: Control de velocidad, dirección y posición, de un SERVO MOTOR, realizado por un PLC, a través de un SERVO DRIVER. En la tabla 1 se muestran
FR-700 Variadores de frecuencia /// FR-700 Variadores de frecuencia /// FR-700 Variador.
 Propósito: Entradas de Seguridad Conformidad con Directiva de Maquinária UE. Producto: FR-D700 Función Safety ADVERTENCIA Cualquier uso indebido de la función de seguridad podría dar lugar a lesiones personales
Propósito: Entradas de Seguridad Conformidad con Directiva de Maquinária UE. Producto: FR-D700 Función Safety ADVERTENCIA Cualquier uso indebido de la función de seguridad podría dar lugar a lesiones personales
DRIVER IGBT 3073 DATOS DESTACABLES CARACTERISTICAS 1/6
 DATOS DESTACABLES Driver para -s dobles de gama media, dentro de un rango de trabajo de 1200-1700V. Este Driver por si solo es capaz de controlar una rama branch (TOP y BOTTOM). Esta tarjeta a diferencia
DATOS DESTACABLES Driver para -s dobles de gama media, dentro de un rango de trabajo de 1200-1700V. Este Driver por si solo es capaz de controlar una rama branch (TOP y BOTTOM). Esta tarjeta a diferencia
OMIKRON BARCELONA, S.L. se reserva el derecho de modificar las características de sus equipos sin previo aviso.
 OMIKRON BARCELONA, S.L. se reserva el derecho de modificar las características de sus equipos sin previo aviso. DESCRIPCIÓN El nuevo modelo de receptor RCP/485 está diseñado para funcionar con equipos
OMIKRON BARCELONA, S.L. se reserva el derecho de modificar las características de sus equipos sin previo aviso. DESCRIPCIÓN El nuevo modelo de receptor RCP/485 está diseñado para funcionar con equipos
Dos funciones de rampas UP/DOWN. Control de Corriente constante.
 Información Descripción General Los módulos electrónicos serie PWD00A-400 para control de válvulas proporcionales son compactos, fáciles de instalar en rieles DIN y disponen de conexiones tipo bornera.
Información Descripción General Los módulos electrónicos serie PWD00A-400 para control de válvulas proporcionales son compactos, fáciles de instalar en rieles DIN y disponen de conexiones tipo bornera.
VELOCIDAD Y POSICIONAMIENTO CON EL FATEK SERIE FBS
 VELOCIDAD Y POSICIONAMIENTO CON EL FATEK SERIE FBS Descripción: Control de velocidad, dirección y posición, de un SERVO MOTOR, realizado por un PLC, a través de un SERVO DRIVER. En la tabla 1 se muestran
VELOCIDAD Y POSICIONAMIENTO CON EL FATEK SERIE FBS Descripción: Control de velocidad, dirección y posición, de un SERVO MOTOR, realizado por un PLC, a través de un SERVO DRIVER. En la tabla 1 se muestran
Tabla 4.1 Pines de conector DB50 de Scorbot-ER V Plus Motores Eje Motor Número de Pin Interfaz de Potencia 1 2Y (1) 2 3Y (1) 3 2Y (2) 4 4Y (2) 5
 2 3Y (1) 3 2Y (2) 4 4Y (2) 5") DISEÑO DE LA INTERFAZ ELECTRÓNICA.. CONFIGURACIÓN DEL CONECTOR DB0. El Scorbot viene provisto de fábrica de un conector DB0 el cual contiene el cableado hacia los elementos electrónicos del robot, en la
DISEÑO DE LA INTERFAZ ELECTRÓNICA.. CONFIGURACIÓN DEL CONECTOR DB0. El Scorbot viene provisto de fábrica de un conector DB0 el cual contiene el cableado hacia los elementos electrónicos del robot, en la
CYBERTECH 2018 TALLER 03: MOTORES Y POTENCIA
 CYBERTECH 2018 TALLER 03: MOTORES Y POTENCIA MATERIALES Arduino Motor Shield LDR Pulsador Pila 9V Motor DC Resistencias Cables MOTORES DC La velocidad de giro depende de la tensión Necesitan una reductora
CYBERTECH 2018 TALLER 03: MOTORES Y POTENCIA MATERIALES Arduino Motor Shield LDR Pulsador Pila 9V Motor DC Resistencias Cables MOTORES DC La velocidad de giro depende de la tensión Necesitan una reductora
Práctica de laboratorio: Ley de Ohm
 Práctica de laboratorio: Ley de Ohm Responda las siguientes preguntas de acuerdo con los conceptos de electricidad y la ley de Ohm. Muestre todos los pasos durante la resolución de problemas. a. Cuáles
Práctica de laboratorio: Ley de Ohm Responda las siguientes preguntas de acuerdo con los conceptos de electricidad y la ley de Ohm. Muestre todos los pasos durante la resolución de problemas. a. Cuáles
Alcalde #1822 Col. Miraflores C.P Guadalajara, Jal. Mexico MX 01 (33) y USA 001 (619)
 y USA 001 (619)") Tu Sitio de Automatización! Descripción ACE-SDE Controlador de velocidad y posición para un motor a pasos, con entradas y salidas digitales para usos múltiples, así también incluye 2 entradas análogas
Tu Sitio de Automatización! Descripción ACE-SDE Controlador de velocidad y posición para un motor a pasos, con entradas y salidas digitales para usos múltiples, así también incluye 2 entradas análogas
Índice de manual. Modulo Nombre Pagina. 0 Introducción 1
 Índice de manual. Manuales operacionales para usuario final Pagina: 1 Modulo Nombre Pagina 0 Introducción 1 II Configuraciones generales y de red para dispositivos biométricos AC-2100. VI Registro de usuarios
Índice de manual. Manuales operacionales para usuario final Pagina: 1 Modulo Nombre Pagina 0 Introducción 1 II Configuraciones generales y de red para dispositivos biométricos AC-2100. VI Registro de usuarios
Manual de Usuario FR1300. Versión: Fecha: Agosto 2016
 Manual de Usuario Versión: 1.0.1 Fecha: Agosto 2016 contenido 1. Instalación... 2. Principio de trabajo... 3. Otras funciones... 1 2 3 4. Modo de verificación... 5 5. Lista de parámetros... 8 6. Precauciones...
Manual de Usuario Versión: 1.0.1 Fecha: Agosto 2016 contenido 1. Instalación... 2. Principio de trabajo... 3. Otras funciones... 1 2 3 4. Modo de verificación... 5 5. Lista de parámetros... 8 6. Precauciones...
STEPFAQ18003A EP Soporte Técnico y Soluciones 2018 FAQ Configurar un Ekip UP & Ekip Touch para comunicar vía Modbus RTU/TCP
 STEPFAQ18003A EP Soporte Técnico y Soluciones 2018 FAQ Configurar un Ekip UP & Ekip Touch para comunicar vía Modbus RTU/TCP En el presente documento se explica cómo configurar un Ekip UP y un Interruptor
STEPFAQ18003A EP Soporte Técnico y Soluciones 2018 FAQ Configurar un Ekip UP & Ekip Touch para comunicar vía Modbus RTU/TCP En el presente documento se explica cómo configurar un Ekip UP y un Interruptor
Lexium 32. Control Pulso Dirección Lexium 32 23/11/09 Rev. 1.0
 Lexium 32. Control Pulso Dirección Lexium 32 23/11/09 Rev. 1.0 Para realizar el control por pulso dirección se debe configurar el Lexium 32 en modo Electronic Gear. Solo posible con Lexium 32C y Lexium
Lexium 32. Control Pulso Dirección Lexium 32 23/11/09 Rev. 1.0 Para realizar el control por pulso dirección se debe configurar el Lexium 32 en modo Electronic Gear. Solo posible con Lexium 32C y Lexium
DRIVER IGBT MTC 3066
 DESCRIPCION Driver para -s dobles de gama alta, dentro de un rango de trabajo de 1200-1700V. Este Driver por si solo es capaz de controlar una rama branch (TOP y BOTTOM). Esta tarjeta a diferencia de otro
DESCRIPCION Driver para -s dobles de gama alta, dentro de un rango de trabajo de 1200-1700V. Este Driver por si solo es capaz de controlar una rama branch (TOP y BOTTOM). Esta tarjeta a diferencia de otro
Controlador de movimiento programable de 4 ejes tipo tarjeta MIC. Tipo de conexión. Tipo tarjeta de 4 ejes. Controlador de movimiento programable
 Controlador de movimiento programable de 4 ejes tipo tarjeta Características Disponible para control independiente de 4 ejes de motores a es de CA Tarjeta PC-PCI Busqueda automática de posición inicial
Controlador de movimiento programable de 4 ejes tipo tarjeta Características Disponible para control independiente de 4 ejes de motores a es de CA Tarjeta PC-PCI Busqueda automática de posición inicial
Manual sobre Motores a Pasos (Stepper motors)
") Manual sobre Motores a Pasos (Stepper motors) Los motores a pasos o paso a paso son ideales en la construcción de mecanismos donde se requieren movimientos con exactitud. Estos motores son dispositivos
Manual sobre Motores a Pasos (Stepper motors) Los motores a pasos o paso a paso son ideales en la construcción de mecanismos donde se requieren movimientos con exactitud. Estos motores son dispositivos
Arquitectura de un Controlador Electrónico de Procesos
 Arquitectura de un Controlador Electrónico de Procesos Unidad Central de Procesamiento (CPU) La unidad central de procesamiento es el elemento más importante de un controlador electrónico de procesos.
Arquitectura de un Controlador Electrónico de Procesos Unidad Central de Procesamiento (CPU) La unidad central de procesamiento es el elemento más importante de un controlador electrónico de procesos.
CONTENIDO. 1. Definición. 6. Ejemplos. 6.1 Medición de distancia y velocidad. 2. Aplicaciones. 3. Clasificación
 Encoders Rotativos CONTENIDO 1. Definición 2. Aplicaciones 6. Ejemplos 6.1 Medición de distancia y velocidad 3. Clasificación 4. Principios de operación 4.1 Encoder Incremental Principio de funcionamiento
Encoders Rotativos CONTENIDO 1. Definición 2. Aplicaciones 6. Ejemplos 6.1 Medición de distancia y velocidad 3. Clasificación 4. Principios de operación 4.1 Encoder Incremental Principio de funcionamiento
Amplificador de Señal HDMI - 35m p
 Amplificador de Señal HDMI - 35m - 1080p Product ID: HDBOOST Este amplificador de señal HDMI le permite aumentar la potencia de la señal de su fuente de vídeo HDMI, a fin de poder conectar una pantalla
Amplificador de Señal HDMI - 35m - 1080p Product ID: HDBOOST Este amplificador de señal HDMI le permite aumentar la potencia de la señal de su fuente de vídeo HDMI, a fin de poder conectar una pantalla
Tecnología robótica. Tema 7.- Tarjeta controladora Arduino
 1. Elementos electrónicos. 2. Placa Arduino. Sus componentes. 3. Software de Arduino. 4. Características de programación en Arduino. 5. Proyectos con la tarjeta controladora Arduino. 1. Elementos electrónicos.
1. Elementos electrónicos. 2. Placa Arduino. Sus componentes. 3. Software de Arduino. 4. Características de programación en Arduino. 5. Proyectos con la tarjeta controladora Arduino. 1. Elementos electrónicos.
CONTROLADORA 3 EJES 6 AMPERIOS
 CONTROLADORA 3 EJES 6 AMPERIOS Características: -driver universal BIPOLAR L298 2 amperios por fase -selección de paso o 1/2 paso -corriente ajustable entre 10 al 100% vía potenciómetro Reducción automática
CONTROLADORA 3 EJES 6 AMPERIOS Características: -driver universal BIPOLAR L298 2 amperios por fase -selección de paso o 1/2 paso -corriente ajustable entre 10 al 100% vía potenciómetro Reducción automática
Uso del osciloscopio digital, para la determinación del factor de potencia
 Página 1/10 Uso del osciloscopio digital, para la determinación del factor de potencia N de práctica: 05 Página 2/10 1. Seguridad en la ejecución Peligro o Fuente de energía Riesgo asociado 1 Tensión Alterna
Página 1/10 Uso del osciloscopio digital, para la determinación del factor de potencia N de práctica: 05 Página 2/10 1. Seguridad en la ejecución Peligro o Fuente de energía Riesgo asociado 1 Tensión Alterna
M-Bus Master MultiPort 250D
 M-Bus Master MultiPort 250D Lectura remota vía M-Bus Hasta 250 contadores por M-Bus Master y en cascada, hasta 1250 contadores en un sistema Soporte de direccionamiento primario, secundario, secundario
M-Bus Master MultiPort 250D Lectura remota vía M-Bus Hasta 250 contadores por M-Bus Master y en cascada, hasta 1250 contadores en un sistema Soporte de direccionamiento primario, secundario, secundario
BUS ADAPTER 130 SERIE 100-Interfaz de serie TTL-RS 485 en guía DIN
 CRN TECNOPART, S.A. Sant Roc 30 08340 VILASSAR DE MAR (Barcelona) Tel 902 404 748-937 591 484 Fax 937 591 547 e-mail: crn@crntp.com http:// www.crntecnopart.com EW-070.64 BUS ADAPTER 130 SERIE 100-Interfaz
CRN TECNOPART, S.A. Sant Roc 30 08340 VILASSAR DE MAR (Barcelona) Tel 902 404 748-937 591 484 Fax 937 591 547 e-mail: crn@crntp.com http:// www.crntecnopart.com EW-070.64 BUS ADAPTER 130 SERIE 100-Interfaz
Tutorial sobre Motores Paso a Paso (Stepper motors) Recopilado de Internet
 Recopilado de Internet") Prof: Bolaños D. Tutorial sobre Motores Paso a Paso (Stepper motors) Recopilado de Internet Los motores paso a paso son ideales para la construcción de mecanismos en donde se requieren movimientos muy
Prof: Bolaños D. Tutorial sobre Motores Paso a Paso (Stepper motors) Recopilado de Internet Los motores paso a paso son ideales para la construcción de mecanismos en donde se requieren movimientos muy
UNIVERSIDAD TECNOLÓGICA DE MÉXICO ELECTRÓNICA DE POTENCIA PRÁCTICA 1. MODULACIÓN POR ANCHO DE PULSO.
 UNIVERSIDAD TECNOLÓGICA DE MÉXICO ELECTRÓNICA DE POTENCIA PRÁCTICA 1. MODULACIÓN POR ANCHO DE PULSO. Objetivo: el alumno construirá con un amplificador operacional un sistema que varía el ancho de pulso
UNIVERSIDAD TECNOLÓGICA DE MÉXICO ELECTRÓNICA DE POTENCIA PRÁCTICA 1. MODULACIÓN POR ANCHO DE PULSO. Objetivo: el alumno construirá con un amplificador operacional un sistema que varía el ancho de pulso
Comunicación Serial: Conceptos Generales
 Comunicación Serial: Conceptos Generales Conceptos Generales Qué es la comunicación serial? Qué es RS-232? Qué es RS-422? Qué es RS-485? Qué es handshaking (o intercambio de pulsos de sincronización)?
Comunicación Serial: Conceptos Generales Conceptos Generales Qué es la comunicación serial? Qué es RS-232? Qué es RS-422? Qué es RS-485? Qué es handshaking (o intercambio de pulsos de sincronización)?
Controlador de Movimiento Normal/Interpolación de alta velocidad 2-ejes
 Controlador Movimiento Normal/Interpolación alta velocidad -ejes Controlador Movimiento Normal/Interpolación alta velocidad -ejes Características Control -ejes inpendientes con alta velocidad operación
Controlador Movimiento Normal/Interpolación alta velocidad -ejes Controlador Movimiento Normal/Interpolación alta velocidad -ejes Características Control -ejes inpendientes con alta velocidad operación
Controlador Motor paso a paso SEN-SMC-001
 Controlador Motor paso a paso SEN-SMC-001 Este controlador de motores paso a paso SEN-SMC-001 ofrece una solución sencilla y rápida a las necesidades de control y "micro-stepping" de motores paso a paso.
Controlador Motor paso a paso SEN-SMC-001 Este controlador de motores paso a paso SEN-SMC-001 ofrece una solución sencilla y rápida a las necesidades de control y "micro-stepping" de motores paso a paso.
Como Utilizar el Módulo DC para Monitorear el Rendimiento de Generadores
 Como Utilizar el Módulo DC para Monitorear el Rendimiento de Generadores Esta nota de aplicaciones demostrara como se debe realizar la configuración del módulo DC del registrador TESLA para el monitoreo
Como Utilizar el Módulo DC para Monitorear el Rendimiento de Generadores Esta nota de aplicaciones demostrara como se debe realizar la configuración del módulo DC del registrador TESLA para el monitoreo
El profesor no puede depender del instructor del laboratorio para chequear si el circuito no conlleva nigún riesgo ya el instructor no está siempre
 El profesor no puede depender del instructor del laboratorio para chequear si el circuito no conlleva nigún riesgo ya el instructor no está siempre presente 2008-10-28 15:34 2008-10-28 La matriz de conmutación
El profesor no puede depender del instructor del laboratorio para chequear si el circuito no conlleva nigún riesgo ya el instructor no está siempre presente 2008-10-28 15:34 2008-10-28 La matriz de conmutación
Actuadores eléctricos - Motores
 Servomotores Un servomotor es básicamente un actuador mecánico que contine un motor eléctrico y un conjunto de engranajes que permiten multiplicar el torque del sistema final y tiene la capacidad de ser
Servomotores Un servomotor es básicamente un actuador mecánico que contine un motor eléctrico y un conjunto de engranajes que permiten multiplicar el torque del sistema final y tiene la capacidad de ser
Corrección MOVIDRIVE MDX60B / 61B. Edición 01/2005 LA / ES
 Motorreductores \ Reductores industriales \ Electrónica de accionamiento \ Automatización de accionamiento \ Servicios MOVIDRIVE MDX60B / 6B LA360000 Edición 0/2005 448709 / ES Corrección Instalación Asignación
Motorreductores \ Reductores industriales \ Electrónica de accionamiento \ Automatización de accionamiento \ Servicios MOVIDRIVE MDX60B / 6B LA360000 Edición 0/2005 448709 / ES Corrección Instalación Asignación
Manual de Usuario IP-EXTIO
 Manual de Usuario IP-EXTIO ÍNDICE INFORMACIÓN Y RECOMENDACIONES... 2 CARACTERÍSTICAS TÉCNICAS... 2 1) IP-EXTIO... 2 2) COMPATIBILIDAD... 2 CONEXIÓN A LA UNIDAD IP-12... 3 USO DE UNA ENTRADA DE 4 ESTADOS...
Manual de Usuario IP-EXTIO ÍNDICE INFORMACIÓN Y RECOMENDACIONES... 2 CARACTERÍSTICAS TÉCNICAS... 2 1) IP-EXTIO... 2 2) COMPATIBILIDAD... 2 CONEXIÓN A LA UNIDAD IP-12... 3 USO DE UNA ENTRADA DE 4 ESTADOS...
Guía del Usuario de la PIB300 o PIB301
 P516-097 Guía del Usuario de la PIB300 o PIB301 Instrucciones de Instalación y Operación para la Tarjeta de Interfaz del Panel Pour la portion française, veuillez consulter le site www.schlage.com/support
P516-097 Guía del Usuario de la PIB300 o PIB301 Instrucciones de Instalación y Operación para la Tarjeta de Interfaz del Panel Pour la portion française, veuillez consulter le site www.schlage.com/support
MANUAL DE DESCRIPCIÓN
 MANUAL DE DESCRIPCIÓN 1 ÍNDICE DE CONTENIDO 1. Alimentación.... 3 2. Comunicaciones digitales.... 5 3. Salidas de relés.... 7 4. Salidas digitales.... 9 6. Entradas analógicas.... 12 7. Varios.... 13 8.
MANUAL DE DESCRIPCIÓN 1 ÍNDICE DE CONTENIDO 1. Alimentación.... 3 2. Comunicaciones digitales.... 5 3. Salidas de relés.... 7 4. Salidas digitales.... 9 6. Entradas analógicas.... 12 7. Varios.... 13 8.
Tema: S7-200, Escalado de Valores analógicos
 Autómatas Programables. Guía 8 1 Tema: S7-200, Escalado de Valores analógicos Objetivo General Configurar las entradas analógicas del módulo EM235 en el S7-200 Objetivos Específicos Conectar correctamente
Autómatas Programables. Guía 8 1 Tema: S7-200, Escalado de Valores analógicos Objetivo General Configurar las entradas analógicas del módulo EM235 en el S7-200 Objetivos Específicos Conectar correctamente
Amplificador de Señal HDMI - 35m p
 Amplificador de Señal HDMI - 35m - 1080p Product ID: HDBOOST Este amplificador de señal HDMI le permite aumentar la potencia de la señal de su fuente de video HDMI, a fin de poder conectar una pantalla
Amplificador de Señal HDMI - 35m - 1080p Product ID: HDBOOST Este amplificador de señal HDMI le permite aumentar la potencia de la señal de su fuente de video HDMI, a fin de poder conectar una pantalla
4 Actuadores eléctricos. Alfaomega. Material Web. Arduino control de servomotores a pasos 2
 4 Actuadores eléctricos Capítulo Material Web Arduino control de servomotores a pasos 2 2 Actuadores eléctricos 4.1. 4.1 Arduino control de servomotores a pasos Un servomotor de pasos es un sistema formado
4 Actuadores eléctricos Capítulo Material Web Arduino control de servomotores a pasos 2 2 Actuadores eléctricos 4.1. 4.1 Arduino control de servomotores a pasos Un servomotor de pasos es un sistema formado
S i s t e m a d e E n e r g í a I n i n t e r r u m p i d a 45
 S i s t e m a d e E n e r g í a I n i n t e r r u m p i d a 45 2.5 Dispositivo Inversor. 2.5.1 Arreglo de transistores tipo Puente H. El dispositivo inversor es un circuito electrónico que sirve para generar
S i s t e m a d e E n e r g í a I n i n t e r r u m p i d a 45 2.5 Dispositivo Inversor. 2.5.1 Arreglo de transistores tipo Puente H. El dispositivo inversor es un circuito electrónico que sirve para generar
Acelerador Electrónico del Hyundai Sonata ECT Electronic Throttle Control
 LECCION 2 Acelerador Electrónico Hyundai Sonata Acelerador Electrónico del Hyundai Sonata ECT Electronic Throttle Control El Hyundai sonata de la quinta generación es un automóvil que fue elaborado con
LECCION 2 Acelerador Electrónico Hyundai Sonata Acelerador Electrónico del Hyundai Sonata ECT Electronic Throttle Control El Hyundai sonata de la quinta generación es un automóvil que fue elaborado con
GUÍA RÁPIDA PARA LA CONFIGURACIÓN DEL CONVERTIDOR DE FRECUENCIA
 I GUÍA RÁPIDA PARA LA CONFIGURACIÓN DEL CONVERTIDOR DE FRECUEIA LOVATO ELECTRIC S.P.A. 24020 GORLE (BERGAMO) ITALIA VIA DON E. MAZZA, 12 TEL. 035 4282111 FAX (Nazionale): 035 4282200 FAX (International):
I GUÍA RÁPIDA PARA LA CONFIGURACIÓN DEL CONVERTIDOR DE FRECUEIA LOVATO ELECTRIC S.P.A. 24020 GORLE (BERGAMO) ITALIA VIA DON E. MAZZA, 12 TEL. 035 4282111 FAX (Nazionale): 035 4282200 FAX (International):
MANUAL DE USUARIO TARJETA DE CONTACTOS SECOS
 MANUAL DE USUARIO TARJETA DE CONTACTOS SECOS VALIDO PARA SAI INNOVA PLUS RT 1-3KVA Y SAI INNOVA PLUS 1-3KVA 1- DESCRIPCION: Tarjeta de contacto seco una opción del SAI, que se utiliza para proporcionar
MANUAL DE USUARIO TARJETA DE CONTACTOS SECOS VALIDO PARA SAI INNOVA PLUS RT 1-3KVA Y SAI INNOVA PLUS 1-3KVA 1- DESCRIPCION: Tarjeta de contacto seco una opción del SAI, que se utiliza para proporcionar
Bienvenidos! Montaje: L-force 9400 Servo Drives
 Bienvenidos! Montaje: L-force 9400 Servo Drives Introducción a L-force 9400 Diseño Condiciones climáticas inicial Next Back 2 3 Operación alimentación AC Tipo de red TT o TN earthed phase in connection
Bienvenidos! Montaje: L-force 9400 Servo Drives Introducción a L-force 9400 Diseño Condiciones climáticas inicial Next Back 2 3 Operación alimentación AC Tipo de red TT o TN earthed phase in connection
MOTOPLAT VC-11R POS SERVICE HOLLAND. Manual de Instrucciones T: +31 (0) I E: I
 I E: I") MOTOPLAT VC-11R Manual de Instrucciones Probador portátil para alternadores sin desmontar Comprueba todos los alternadores modernos controlados por ordenador, incluso en fase start/stop Diagnostica un
MOTOPLAT VC-11R Manual de Instrucciones Probador portátil para alternadores sin desmontar Comprueba todos los alternadores modernos controlados por ordenador, incluso en fase start/stop Diagnostica un
TARJETA DE DESARROLLO DE SISTEMAS CON TECNOLOGÍA FPGA.
 TARJETA DE DESARROLLO DE SISTEMAS CON TECNOLOGÍA FPGA. Características Técnicas: FPGA de Xilinx XC3S400 ó XC3S1000 ISP PROM XCF02S ó XCF04S Memoria RAM estática: 2Mbytes Memoria FLASH: 4 Mbytes Temperatura
TARJETA DE DESARROLLO DE SISTEMAS CON TECNOLOGÍA FPGA. Características Técnicas: FPGA de Xilinx XC3S400 ó XC3S1000 ISP PROM XCF02S ó XCF04S Memoria RAM estática: 2Mbytes Memoria FLASH: 4 Mbytes Temperatura
Entrega rápida. temperatura. Conexión. 1. Cable radial 2. Radial Radial
 ENCODER INCREMENTAL EJE HUECO COMPACTO PARA APLICACIONES INDUSTRIALES Resolución hasta 5.000 impulsos por vuelta Diámetro exterior 50 mm Eje hueco de Ø 6, 8, 10 o 12 mm Protección IP65 según DIN EN 60529
ENCODER INCREMENTAL EJE HUECO COMPACTO PARA APLICACIONES INDUSTRIALES Resolución hasta 5.000 impulsos por vuelta Diámetro exterior 50 mm Eje hueco de Ø 6, 8, 10 o 12 mm Protección IP65 según DIN EN 60529
Asociación Argentina de Control Automático Primera Jornada AADECA sobre: CONTROL DE MOVIMIENTOS 8 de junio de 2010
 Unidad de Control Eje 1 Periferia PLC Eje 2 HMI Eje 3 Principios funcionales (Circuito de Potencia) Principios funcionales (Circuito de Control del PWM) Unidades Rectificadoras (Tiristores e IGBTs) Rectificación
Unidad de Control Eje 1 Periferia PLC Eje 2 HMI Eje 3 Principios funcionales (Circuito de Potencia) Principios funcionales (Circuito de Control del PWM) Unidades Rectificadoras (Tiristores e IGBTs) Rectificación
CONSTRUCCIÓN DE TIMER PARA VUELO CIRCULAR CON NANO ARDUINO
 CONSTRUCCIÓN DE TIMER PARA VUELO CIRCULAR CON NANO ARDUINO Para aquellos que se inician en el vuelo circular eléctrico, pueden realizar su propio timer basándose en una placa nano arduino totalmente configurable.
CONSTRUCCIÓN DE TIMER PARA VUELO CIRCULAR CON NANO ARDUINO Para aquellos que se inician en el vuelo circular eléctrico, pueden realizar su propio timer basándose en una placa nano arduino totalmente configurable.
TARJETA DE DESARROLLO DE SISTEMAS CON TECNOLOGÍA FPGA.
 TARJETA DE DESARROLLO DE SISTEMAS CON TECNOLOGÍA FPGA. Características Técnicas: FPGA de Xilinx XC2S400E ISP PROM XC18V04 Memoria RAM estática: 2Mbytes Memoria FLASH: 4 Mbytes Temperatura de almacenamiento:
TARJETA DE DESARROLLO DE SISTEMAS CON TECNOLOGÍA FPGA. Características Técnicas: FPGA de Xilinx XC2S400E ISP PROM XC18V04 Memoria RAM estática: 2Mbytes Memoria FLASH: 4 Mbytes Temperatura de almacenamiento:
Instrucciones de uso. CONTROLLER e AS-i AC1308/AC / / 2004
 Instrucciones de uso CONTROLLER e AS-i AC1308/AC1314 ES 7390396 / 02 03 / 2004 1 2 3 4 5 Índice de contenidos Utilización correcta... 3 Interfaz de programación RS232C... 3 Interfaz DeviceNet... 3 Montaje...
Instrucciones de uso CONTROLLER e AS-i AC1308/AC1314 ES 7390396 / 02 03 / 2004 1 2 3 4 5 Índice de contenidos Utilización correcta... 3 Interfaz de programación RS232C... 3 Interfaz DeviceNet... 3 Montaje...
Controlador del Operador de Puerta Automática. Manual de usuario
 Controlador del Operador de Puerta Automática Manual de usuario Descripción de los conectores Figura 1 Conector A B C D E F G H I Entrada de 220V CA Conector del motor, Entrada de encoder Conector de comandos
Controlador del Operador de Puerta Automática Manual de usuario Descripción de los conectores Figura 1 Conector A B C D E F G H I Entrada de 220V CA Conector del motor, Entrada de encoder Conector de comandos
3 Interfaz PC DSP. 3.1 Introducción a las comunicaciones serie. 3 Interfaz PC DSP
 3 Interfaz PC DSP 3.1 Introducción a las comunicaciones serie Las comunicaciones serie se utilizan para enviar datos a través de largas distancias, ya que las comunicaciones en paralelo exigen demasiado
3 Interfaz PC DSP 3.1 Introducción a las comunicaciones serie Las comunicaciones serie se utilizan para enviar datos a través de largas distancias, ya que las comunicaciones en paralelo exigen demasiado
Tu Sitio de Automatización!
 Tu Sitio de Automatización! PLC FBs-20MC PLC con 20 variables de E/S: 12entradas digitales y 8 salidas de relevador o transistor Características Alta velocidad Conexión en red hasta 254 cerebros (CPU's)
Tu Sitio de Automatización! PLC FBs-20MC PLC con 20 variables de E/S: 12entradas digitales y 8 salidas de relevador o transistor Características Alta velocidad Conexión en red hasta 254 cerebros (CPU's)
MANUAL DE INSTALACIÓN EQUIPOS DE TELECONTROL AVYWEB Y AVYALARM
 MANUAL DE INSTALACIÓN EQUIPOS DE TELECONTROL AVYWEB Y AVYALARM Revisión 1.00, DICIEMBRE 2006 2006 AVYNTEC Todos los derechos reservados. INDICE DE CONTENIDOS: Revisiones Documentación... 2 Advertencias
MANUAL DE INSTALACIÓN EQUIPOS DE TELECONTROL AVYWEB Y AVYALARM Revisión 1.00, DICIEMBRE 2006 2006 AVYNTEC Todos los derechos reservados. INDICE DE CONTENIDOS: Revisiones Documentación... 2 Advertencias
TERMOSTATO F Manual del usuario
 Fecha edición 09/2014 N Versión 01 TERMOSTATO F1219784 Manual del usuario 1 FUNCIÓN PRINCIPAL Cambia los modos entre frío y calor; Temperatura de control estableciendo el valor de ajuste de temperatura
Fecha edición 09/2014 N Versión 01 TERMOSTATO F1219784 Manual del usuario 1 FUNCIÓN PRINCIPAL Cambia los modos entre frío y calor; Temperatura de control estableciendo el valor de ajuste de temperatura
Diferencia de fase Pulso + dirección Arriba/Abajo Incremental IN6 CIO Fase A CAV 1 Entrada contaje Entrada incremental Entrada contaje CAV 1
 CJ1M El contaje se puede parar temporalmente a través del bit de contador de puerta (función Gate ). Entrada Canal Bit Pulso de entrada Diferencia de fase Pulso dirección Arriba/Abajo Incremental IN6 CIO
CJ1M El contaje se puede parar temporalmente a través del bit de contador de puerta (función Gate ). Entrada Canal Bit Pulso de entrada Diferencia de fase Pulso dirección Arriba/Abajo Incremental IN6 CIO
4. Comunicaciones serie y paralelo
 4. Comunicaciones serie y paralelo CONCEPTOS DE TRANSMISIÓN DE DATOS DIGITALES Transmisión serie y paralela Transmisión asíncrona y síncrona Interfaz DTE-DCE INTERFAZ EIA-232 / V.24 Especificaciones mecánicas
4. Comunicaciones serie y paralelo CONCEPTOS DE TRANSMISIÓN DE DATOS DIGITALES Transmisión serie y paralela Transmisión asíncrona y síncrona Interfaz DTE-DCE INTERFAZ EIA-232 / V.24 Especificaciones mecánicas
µp-1axv1-02-p Manual del usuario
 ÍNDICE 2 PRESENTACIÓN 4 PRECAUCIONES INICIALES 4 CONEXIONADO 5 IDENTIFICACIÓN CONECTORES 5 PWR 5 MOTOR 5 SERIAL 5 IN1 6 IN2 6 ALIMENTACIÓN (PWR) 6 MOTOR (MOTOR) 7 INTENSIDAD DEL MOTOR 8 CONTROL TEMPERATURA
ÍNDICE 2 PRESENTACIÓN 4 PRECAUCIONES INICIALES 4 CONEXIONADO 5 IDENTIFICACIÓN CONECTORES 5 PWR 5 MOTOR 5 SERIAL 5 IN1 6 IN2 6 ALIMENTACIÓN (PWR) 6 MOTOR (MOTOR) 7 INTENSIDAD DEL MOTOR 8 CONTROL TEMPERATURA
MANUAL BÁSICO PARA MIGRACIÓN DE DIGITAX A UNIDRIVE SP
 MANUAL BÁSICO PARA MIGRACIÓN DE DIGITAX A UNIDRIVE SP v1.4 Introducción... 3 Servo DUTYMAX... 4 Bornero servo DUTYMAX... 4 Termistor Digitax... 4 Cambios en bornero de potencia... 4 Instalación eléctrica...
MANUAL BÁSICO PARA MIGRACIÓN DE DIGITAX A UNIDRIVE SP v1.4 Introducción... 3 Servo DUTYMAX... 4 Bornero servo DUTYMAX... 4 Termistor Digitax... 4 Cambios en bornero de potencia... 4 Instalación eléctrica...
Tu Sitio de Automatización! PLC FBs-24MA
 Tu Sitio de Automatización! PLC FBs-24MA PLC con 24 variables de E/S: 14 entradas digitales y 10 salidas de relevador o transistor Características Conexión en red hasta 254 cerebros (CPU's) Hasta 3 puertos
Tu Sitio de Automatización! PLC FBs-24MA PLC con 24 variables de E/S: 14 entradas digitales y 10 salidas de relevador o transistor Características Conexión en red hasta 254 cerebros (CPU's) Hasta 3 puertos
Unidad III. Interfaces de comunicación Series, USB, CAN, Field Bus, Etc.
 Unidad III Interfaces de comunicación Series, USB, CAN, Field Bus, Etc. Principios básicos Elementos comunes en sistemas de comunicación de datos Trasmisor y Receptor Tabla ASCII American Standard Code
Unidad III Interfaces de comunicación Series, USB, CAN, Field Bus, Etc. Principios básicos Elementos comunes en sistemas de comunicación de datos Trasmisor y Receptor Tabla ASCII American Standard Code
Control de Motores Paso a Paso (Stepper motors)
") Control de Motores Paso a Paso (Stepper motors) Los motores paso a paso son ideales para la construcción de mecanismos en donde se requieren movimientos muy precisos. La característica principal de estos
Control de Motores Paso a Paso (Stepper motors) Los motores paso a paso son ideales para la construcción de mecanismos en donde se requieren movimientos muy precisos. La característica principal de estos
CONTROL ELECTRÓNICO DE MOTORES PASO A PASO
 CONTROL ELECTRÓNICO DE MOTORES Página 1 de 5 Un motor paso a paso es un motor de corriente continua empleado en sistemas donde se requieran movimientos muy precisos. Para que se produzca el giro, hay que
CONTROL ELECTRÓNICO DE MOTORES Página 1 de 5 Un motor paso a paso es un motor de corriente continua empleado en sistemas donde se requieran movimientos muy precisos. Para que se produzca el giro, hay que
COMPOBUS Mario Román y Miguel Ángel Monfort CS12CA COMUNICACIONES INDUSTRIALES 2010/2011
 Mario Román y Miguel Ángel Monfort CS12CA COMUNICACIONES INDUSTRIALES 2010/2011 INDICE: 1. OBJETIVOS DE LA PRACTICA... 2. DESCRIPCION RAPIDA DE LA PRACTICA 3. ELEMENTOS DE LA PRACTICA. 1. FUENTE DE ALIMENTACION
Mario Román y Miguel Ángel Monfort CS12CA COMUNICACIONES INDUSTRIALES 2010/2011 INDICE: 1. OBJETIVOS DE LA PRACTICA... 2. DESCRIPCION RAPIDA DE LA PRACTICA 3. ELEMENTOS DE LA PRACTICA. 1. FUENTE DE ALIMENTACION
Guía de Instalación SBTL2000 / SBTL3000
 Guía de Instalación SBTL2000 / SBTL3000 1. Preparación 1) Realice una ranura en el suelo con una herramienta adecuada. La profundidad y el ancho deben ser de aproximadamente 100 mm y 30 mm. 2) Coloque
Guía de Instalación SBTL2000 / SBTL3000 1. Preparación 1) Realice una ranura en el suelo con una herramienta adecuada. La profundidad y el ancho deben ser de aproximadamente 100 mm y 30 mm. 2) Coloque
Bluetooth 8 RELES RGB ANDROID
 Bluetooth 8 RELES RGB ANDROID www.electrotas.com.ar Especificaciones Técnicas: Alimentación 12V c.c. 1 A (Positivo al centro) (No Incluida). Tensión y Corriente máxima por Rele 220V 7 A. 12V 3 A máx. por
Bluetooth 8 RELES RGB ANDROID www.electrotas.com.ar Especificaciones Técnicas: Alimentación 12V c.c. 1 A (Positivo al centro) (No Incluida). Tensión y Corriente máxima por Rele 220V 7 A. 12V 3 A máx. por
Servomotores de la serie G
 P IM AC ERVO DRIVER ADR COM 0 X0 67 9 8 0 4 X R88M-@ ervomotores de la serie Una amplia gama de servomotores compactos para satisfacer todas las necesidades de aplicación Par máximo del 00% del par nominal
P IM AC ERVO DRIVER ADR COM 0 X0 67 9 8 0 4 X R88M-@ ervomotores de la serie Una amplia gama de servomotores compactos para satisfacer todas las necesidades de aplicación Par máximo del 00% del par nominal
ÍNDICE LA EMPRESA ORGANIZACIÓN BENEFICIOS 360 NUESTROS CLIENTES PROYECTOS DIVISIONES
 PROFILE ÍNDICE LA EMPRESA ORGANIZACIÓN BENEFICIOS 360 NUESTROS CLIENTES PROYECTOS DIVISIONES QUIÉNES SOMOS? Tecno Ingeniería Industrial S.A.C. Es una empresa peruana fundada en el año 2005 por ingenieros
PROFILE ÍNDICE LA EMPRESA ORGANIZACIÓN BENEFICIOS 360 NUESTROS CLIENTES PROYECTOS DIVISIONES QUIÉNES SOMOS? Tecno Ingeniería Industrial S.A.C. Es una empresa peruana fundada en el año 2005 por ingenieros
SERIE 59. Abrazadera posterior. Abrazadera frontal ENCODER INCREMENTAL EJE HUECO DE ALTA RESOLUCIÓN PARA APLICACIONES INDUSTRIALES
 ENCODER INCREMENTAL EJE HUECO DE ALTA RESOLUCIÓN PARA APLICACIONES INDUSTRIALES Resolución hasta 50.000 impulsos por vuelta Diámetro exterior 58 mm Eje hueco de Ø 9.52 a 14 mm Protección IP65 según DIN
ENCODER INCREMENTAL EJE HUECO DE ALTA RESOLUCIÓN PARA APLICACIONES INDUSTRIALES Resolución hasta 50.000 impulsos por vuelta Diámetro exterior 58 mm Eje hueco de Ø 9.52 a 14 mm Protección IP65 según DIN
Tutorial: Uso de Driver L298N para motores DC con Arduino
 Tutorial: Uso de Driver L298N para motores DC con Arduino El siguiente tutorial esta basado en el Driver dual para motores (Full-Bridge) L298N, ofrecido por ELECTRONILAB.CO. Puedes adquirir este módulo
Tutorial: Uso de Driver L298N para motores DC con Arduino El siguiente tutorial esta basado en el Driver dual para motores (Full-Bridge) L298N, ofrecido por ELECTRONILAB.CO. Puedes adquirir este módulo
RMS1-RM Manual del usuario
 R4 www.exemys.com 1 Los Productos están en permanente evolución para satisfacer las necesidades de nuestros clientes. Por esta razón, las especificaciones y capacidades están sujetas a cambios sin previo
R4 www.exemys.com 1 Los Productos están en permanente evolución para satisfacer las necesidades de nuestros clientes. Por esta razón, las especificaciones y capacidades están sujetas a cambios sin previo
GUÍA RÁPIDA REPETIDOR WESTERMO RD-48
 GUÍA RÁPIDA REPETIDOR WESTERMO RD-48 ESTE MANUAL CONTIENE: 1.- CARACTERÍSTICAS GENERALES. 2.- PRUEBAS DE FUNCIONAMIENTO. OMRON ELECTRONICS, S.A. WES.DOC Pag. 1 1.- CARACTERISTICAS GENERALES. GUIA RAPIDA
GUÍA RÁPIDA REPETIDOR WESTERMO RD-48 ESTE MANUAL CONTIENE: 1.- CARACTERÍSTICAS GENERALES. 2.- PRUEBAS DE FUNCIONAMIENTO. OMRON ELECTRONICS, S.A. WES.DOC Pag. 1 1.- CARACTERISTICAS GENERALES. GUIA RAPIDA
Pag:1. Descripción. Aplicación
 TARJETA CONTROLADORA DE POTENCIA () Pag:1 TARJETA CONTROLADORA DE POTENCIA () Descripción Tarjeta con excelentes prestaciones dinámicas diseñada para el control de motores, consiguiendo alta precisión
TARJETA CONTROLADORA DE POTENCIA () Pag:1 TARJETA CONTROLADORA DE POTENCIA () Descripción Tarjeta con excelentes prestaciones dinámicas diseñada para el control de motores, consiguiendo alta precisión
Recomendaciones de Medidas de Calidad de Potencia en Circuitos de Rama CA
 Notas de Ingeniería 1 Recomendaciones de Medidas de Calidad de Potencia en Circuitos de Rama CA Notas de Ingeniería 2 Objetivo: El documento fue preparado con el propósito de dar una dirección en cuanto
Notas de Ingeniería 1 Recomendaciones de Medidas de Calidad de Potencia en Circuitos de Rama CA Notas de Ingeniería 2 Objetivo: El documento fue preparado con el propósito de dar una dirección en cuanto
HARDWARE USB/RS232 (28 servos)
") HARDWARE USB/RS232 (28 servos) MANUAL DE MONTAJE Diseño de: J.V.M INDICE 1- MONTAJE DEL HARDWARE.. PAG 2 LISTA DE MATERIALES INSTRUCCIONES PARA EL MONTAJE PINEADO DEL MICROCONTROLADOR 2- ESQUEMA ELECTRONICO
HARDWARE USB/RS232 (28 servos) MANUAL DE MONTAJE Diseño de: J.V.M INDICE 1- MONTAJE DEL HARDWARE.. PAG 2 LISTA DE MATERIALES INSTRUCCIONES PARA EL MONTAJE PINEADO DEL MICROCONTROLADOR 2- ESQUEMA ELECTRONICO
Examen Ordinario de Automatización Industrial
 Examen Ordinario de Automatización Industrial 23 de mayo de 2013 Duración: 1 hora y 15 minutos - Se piden respuestas claras, breves y concisas. No son aceptables divagaciones y ambigüedades. - Consulta
Examen Ordinario de Automatización Industrial 23 de mayo de 2013 Duración: 1 hora y 15 minutos - Se piden respuestas claras, breves y concisas. No son aceptables divagaciones y ambigüedades. - Consulta
Conectar el Victron al ordenador con el programa de configuración VE Bus Quick Configure
 Conectar el Victron al ordenador con el programa de configuración VE Bus Quick Configure Para conectar un Victron a un ordenador es imprescindible asegurarse de algunos requisitos. Solamente modelos con
Conectar el Victron al ordenador con el programa de configuración VE Bus Quick Configure Para conectar un Victron a un ordenador es imprescindible asegurarse de algunos requisitos. Solamente modelos con
Programar posiciones en un Micro Servo Tower Pro SG90 9G
 Programar posiciones en un Micro Servo Tower Pro SG90 9G (Recopilado de Internet. Revision Prof: Bolaños DJB) Versión: 12-04-18 Los servos son motores de corriente continua (CC), pero en lugar tener un
Programar posiciones en un Micro Servo Tower Pro SG90 9G (Recopilado de Internet. Revision Prof: Bolaños DJB) Versión: 12-04-18 Los servos son motores de corriente continua (CC), pero en lugar tener un