Diseño de cartas ASM
|
|
|
- Carla Henríquez Ortega
- hace 7 años
- Vistas:
Transcripción
1 Diseño de cartas ASM
2 El diseño de cartas ASM tiene mucho que ver con la forma y sentido común de interpretar un problema, para luego visualizar un camino que permita encontrar la solución óptima
3 Ejemplo Diseñar un controlador que permita automatizar el funcionamiento de un tren que debe desplazarse de una estación a otra
4 En cada estación se han colocado sensores que detectan cuando el tren se aproxima al andén y envían al vagón una señal denominada PARO. Al recibir dicha señal, el vagón activa su sistema de frenado y el tren comienza a detenerse en forma automática hasta detenerse y colocarse en los límites de la estación
5 Condiciones de funcionamiento 1) El tren debe poder moverse de la estación A a la C y viceversa; sin embargo, no se establece con precisión dónde inicia su recorrido. Por lo tanto, si la trayectoria se realiza de A a C y viceversa se produciría un algoritmo con bastantes estados, por lo cual sería conveniente situarse en la estación B y de ahí desplazarse hacia la dirección.
6 2) También se interpreta que cuando el tren se aproxima a una estación, el sensor correspondiente envía al vagón una señal de PARO que activa el sistema de frenado y detiene al tren justo en los límites de la estación. La condición anterior establece que el sistema de frenado está predeterminado y sólo basta la señal PARO para iniciar su secuencia de frenado.
7 3) En la descripción del problema también puede interpretarse que el tiempo de ascenso/descenso de pasajeros se marca mediante un controlador de tiempo independiente al controlador del sistema.
8 Señales de entrada/salida Señales de entrada Tiempo: Indica el lapso destinado al ascenso o pasajeros. SA: Simboliza al sensor colocado en la estación A. SB: Representa al sensor ubicado en la estación B. SC: Simboliza al sensor colocado en la estación C. DIR: Indica hacia dónde se moverá el tren descenso de
9 Señales de salida Este: Indica que la dirección del tren será hacia el este. Oeste: Esta señal indica que la dirección que tomará el tren será el oeste. Avance: Se envía para que el tren realice su recorrido de una estacióna otra. P. abierta: Señal que permite abrir las puertas del tren cuando se encuentra detenido en una estación.
10 P. cerrada: Señal que cierra las puertas del tren una vez que el tiempo de ascenso/descenso de pasajeros se ha cumplido. Paro Señal que al ser recibida por el tren activa su sistema de frenado para que se detenga lentamente en los límites de una estación. TIEMPO SA SB SC DIR controlador ESTE OESTE AVANCE PARO P. abierta P. CERRADA


11
, dado que el vagón es incapaz de saber en qué estación se encuentra; en consecuencia, sólo podría tenerse")
12 en la carta anterior se puede considerar que los sensores SA, SB y SC actúan de forma similar, por lo cual en lugar de representar tres sensores basta utilizar sólo uno (S), dado que el vagón es incapaz de saber en qué estación se encuentra; en consecuencia, sólo podría tenerse un estado
13 ASIGNACIÓN 1 DISEÑE EL CODIGO VHDL Ó VERILOG DEL DE LA CARTA ASM DEL EJERCICIO ANTERIOR
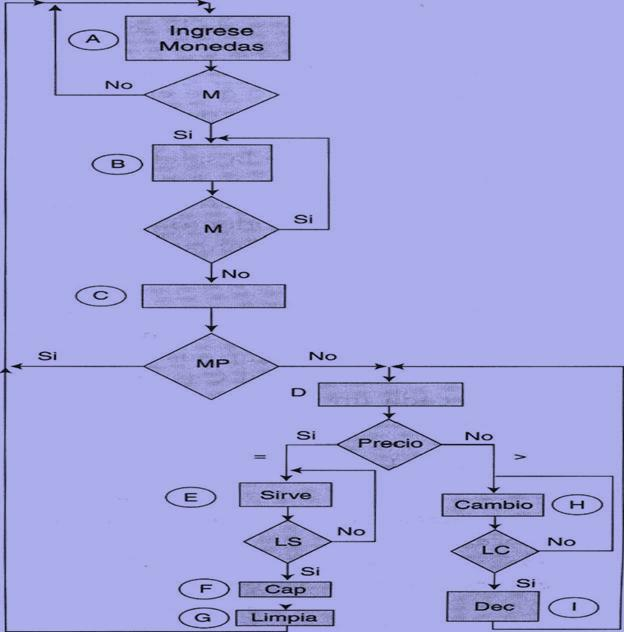
14 EJEMPLO2 Se requiere diseñar una máquina despachadora de refrescos, la cual está formada por tres módulos (subsistemas) independientes. Cada módulo realiza una función predeterminada, pero hay que diseñar el sistema controlador que gobierne y sincronice cada acción de los subsistemas. A continuación se describe cada subsistema:
15 a) Módulo de recolección de monedas. Recibe las monedas que el cliente introduce en la máquina para obtener el refresco. Características Acepta monedas de $5.00, $10.00 y $ Cuenta con un mecanismo que rechaza monedas defectuosas. Posee un mecanismo de detección de valor de la moneda; es decir, es capaz de discriminar el valor de la moneda Menor que precio (MP) e Igual a precio (Precio)
16 El sistema recibe dos señales de entrada denominadas Limpieza y Captura. La primera limpia el sistema y lo deja en condiciones de inicio; la segunda recolecta las monedas que ingresó el cliente.
17 b) Módulo de devolución de monedas. Proporciona el cambio al cliente cuando introduce monedas cuyo monto excede el precio del producto. Características Activa una señal de salida denominada Cambio, cuya función es entregar cambio al cliente en monedas de cinco pesos. Recibe una señal denominada Listo cambio (LC), que indica cuándo se han dado cinco pesos de cambio.
18 c) Módulo de servicio. Su función es entregar el refresco al cliente; sin embargo, el producto sólo se libera cuando la cantidad que proporcionó el cliente es igual al valor del refresco. Características Cuenta con una señal de salida denominada Sirve, que activa el sensor correspondiente para que el refresco se pueda servir y entregar. Posee una señal de entrada denominada Listo servicio (LS), que indica cuándo se entregó el refresco.

19 d) Controlador. Esta unidad sincroniza las acciones de los diferentes módulos para automatizar el funcionamiento de la máquina despachadora de refrescos.
20
21 Codigo vhdl
22
23
24
25

26
BOLETIN DE EJERCICIOS 5
 BOLETIN DE EJERCICIOS 5 SISTEMAS SECUENCIALES DE CONTROL EJERCICIO 5. El producto final de una línea de fabricación son barras metálicas cuya longitud ha de ser inferior o igual a L. Para hacer la selección
BOLETIN DE EJERCICIOS 5 SISTEMAS SECUENCIALES DE CONTROL EJERCICIO 5. El producto final de una línea de fabricación son barras metálicas cuya longitud ha de ser inferior o igual a L. Para hacer la selección
Automatización Industrial 1/5
 Automatización Industrial 1/5 Automatización Industrial Boletín de Problemas nº 2 1.- Utilice el lenguaje Kop para diseñar un mando automático que controle el vaivén de una cepilladora. El mando debe cumplir:
Automatización Industrial 1/5 Automatización Industrial Boletín de Problemas nº 2 1.- Utilice el lenguaje Kop para diseñar un mando automático que controle el vaivén de una cepilladora. El mando debe cumplir:
La velocidad del paquete es: sustituimos los datos del enunciado
 Movimiento rectilíneo. 01. Desde un globo que se eleva a velocidad constante de 3,5 m/s se suelta un paquete cuando se encuentra a 900 m de altura sobre el suelo. Calcula: a) La altura máxima del paquete
Movimiento rectilíneo. 01. Desde un globo que se eleva a velocidad constante de 3,5 m/s se suelta un paquete cuando se encuentra a 900 m de altura sobre el suelo. Calcula: a) La altura máxima del paquete
Ingeniería de Sistemas. basados en computadoras
 Ingeniería de Sistemas basados en computadoras Ingeniería de Sistemas basados en computadoras Sistema basado en computadores (SBC) Las aplicaciones informáticas se integran en sistemas contribuyendo, junto
Ingeniería de Sistemas basados en computadoras Ingeniería de Sistemas basados en computadoras Sistema basado en computadores (SBC) Las aplicaciones informáticas se integran en sistemas contribuyendo, junto
MAGNITUDES DE MOVIMIENTO TEMA 2
 MAGNITUDES DE MOVIMIENTO TEMA 2 QUÉ ES EL MOVIMIENTO? Para saber si está en movimiento un cuerpo fijamos su posición respecto a un punto*, y: si varía en el transcurso del tiempo, el cuerpo está en movimiento
MAGNITUDES DE MOVIMIENTO TEMA 2 QUÉ ES EL MOVIMIENTO? Para saber si está en movimiento un cuerpo fijamos su posición respecto a un punto*, y: si varía en el transcurso del tiempo, el cuerpo está en movimiento
Universidad Central de Venezuela Facultad de Ciencias Escuela de Computación Organización y Estructura del Computador II Semestre I-2014.
 Universidad Central de Venezuela Facultad de Ciencias Escuela de Computación Organización y Estructura del Computador II Semestre I-2014 Práctica #3 1) Qué es un latch? Qué es un flip-flop? 2) Si se aplican
Universidad Central de Venezuela Facultad de Ciencias Escuela de Computación Organización y Estructura del Computador II Semestre I-2014 Práctica #3 1) Qué es un latch? Qué es un flip-flop? 2) Si se aplican
TALLER DIAGRAMAS DE FLUJO EN LEGO MINDSTORMS
 TALLER DIAGRAMAS DE FLUJO EN LEGO MINDSTORMS Cuando se quiere realizar un programa bien pensado para solucionar problemas de robótica es necesario generar algoritmos que permitan llegar a soluciones hipotéticas
TALLER DIAGRAMAS DE FLUJO EN LEGO MINDSTORMS Cuando se quiere realizar un programa bien pensado para solucionar problemas de robótica es necesario generar algoritmos que permitan llegar a soluciones hipotéticas
Restricciones del diseño: La grúa debe ser construida única y exclusivamente de K Nex.
 La ciudad medieval francesa de Carcasona esta en peligro, y debemos construir la muralla más grande y con mayor peso posible, de esa forma evitar sea robado el gran tesoro de la cuidad. Para ello es necesario
La ciudad medieval francesa de Carcasona esta en peligro, y debemos construir la muralla más grande y con mayor peso posible, de esa forma evitar sea robado el gran tesoro de la cuidad. Para ello es necesario
TP2: Estructura de los sistemas automáticos
 TP2: Estructura de los sistemas automáticos Leer atentamente la descripción de cada uno de los siguientes sistemas automáticos y, para cada uno de ellos, resolver las consignas que se presentan. Control
TP2: Estructura de los sistemas automáticos Leer atentamente la descripción de cada uno de los siguientes sistemas automáticos y, para cada uno de ellos, resolver las consignas que se presentan. Control
KARELEANDO Jugando a programar Por: Fernando Guzmán
 KARELEANDO Jugando a programar Por: Fernando Guzmán omijal@gmail.com El presente documento surge de la inquietud de ofrecer un manual de introducción básico donde el lector pueda de inmediato poder realizar
KARELEANDO Jugando a programar Por: Fernando Guzmán omijal@gmail.com El presente documento surge de la inquietud de ofrecer un manual de introducción básico donde el lector pueda de inmediato poder realizar
Problemas básicos y esenciales para comprender y diseñar el funcionamiento de las montañas rusas.
 Problemas básicos y esenciales para comprender y diseñar el funcionamiento de las montañas rusas. Montaña Rusa- Proceso de Análisis, Comprensión, Diseño, Construcción y Comprobación de Principios Físicos.
Problemas básicos y esenciales para comprender y diseñar el funcionamiento de las montañas rusas. Montaña Rusa- Proceso de Análisis, Comprensión, Diseño, Construcción y Comprobación de Principios Físicos.
El Hombre: herramientas y máquinas
 El Hombre: herramientas y máquinas Desde sus inicios el Hombre (los seres humanos, es decir hombre y mujer) ha necesitado herramientas para realizar su trabajo y sobrevivir, por ello con su creatividad
El Hombre: herramientas y máquinas Desde sus inicios el Hombre (los seres humanos, es decir hombre y mujer) ha necesitado herramientas para realizar su trabajo y sobrevivir, por ello con su creatividad
Jidoka. Derecho de Autor: Dr. Mohammad R. Azarang. Pilares de TPS. Antecedentes Para que sirve Jidoka? Automatización con la inteligencia humana
 Pilares de TPS Jidoka Automatización con la inteligencia humana El sistema de Producción de Toyota fue establecido basado en 2 pilares: 1.Primer pilar llamado Jidoka - El equipo se para inmediatamente
Pilares de TPS Jidoka Automatización con la inteligencia humana El sistema de Producción de Toyota fue establecido basado en 2 pilares: 1.Primer pilar llamado Jidoka - El equipo se para inmediatamente
3.8. Tutorial Carretilla
 3.8. Tutorial Carretilla 3.8.1. Introducción En este tutorial se va a simular el funcionamiento de una carretilla convencional. Se simularán sus dos movimientos principales, esto es, el movimiento de desplazamiento
3.8. Tutorial Carretilla 3.8.1. Introducción En este tutorial se va a simular el funcionamiento de una carretilla convencional. Se simularán sus dos movimientos principales, esto es, el movimiento de desplazamiento
SISTEMAS DIGITALES MÉTODOS DE DISEÑO LDD 2007-08 1. eman ta zabal zazu
 SISTEMAS DIGITALES MÉTODOS DE DISEÑO LDD 2007-08 1 SISTEMAS DIGITALES MÉTODOS DE DISEÑO Revisión de la metodología de diseño de sistemas digitales síncronos. Métodos de implementación de unidades de control:
SISTEMAS DIGITALES MÉTODOS DE DISEÑO LDD 2007-08 1 SISTEMAS DIGITALES MÉTODOS DE DISEÑO Revisión de la metodología de diseño de sistemas digitales síncronos. Métodos de implementación de unidades de control:
INGENIERÍA DEL SOFTWARE DE GESTIÓN II PROBLEMA DE DIAGRAMA DE CLASES "GESTIÓN DE RELACIONES HUMANAS EN DEPARTAMENTOS"
 INGENIERÍA DEL SOFTWARE DE GESTIÓN II PROBLEMA DE DIAGRAMA DE CLASES "GESTIÓN DE RELACIONES HUMANAS EN DEPARTAMENTOS" Se ha de modelar una parte de la funcionalidad recogida en un sistema de gestión universitaria,
INGENIERÍA DEL SOFTWARE DE GESTIÓN II PROBLEMA DE DIAGRAMA DE CLASES "GESTIÓN DE RELACIONES HUMANAS EN DEPARTAMENTOS" Se ha de modelar una parte de la funcionalidad recogida en un sistema de gestión universitaria,
k 11 N. de publicación: ES k 51 Int. Cl. 5 : A21C 11/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA k 11 N. de publicación: ES 2 041 476 k 1 Int. Cl. : A21C 11/00 A21C 11/ 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea: 9017.3 86
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA k 11 N. de publicación: ES 2 041 476 k 1 Int. Cl. : A21C 11/00 A21C 11/ 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea: 9017.3 86
Línea de Transporte y Clasificación
 P á g i n a 1 Línea de Transporte y Clasificación El modelo a escala de la línea de transporte y clasificación que se observa, se encuentra integrado por un depósito de almacenamiento que posee una cadena
P á g i n a 1 Línea de Transporte y Clasificación El modelo a escala de la línea de transporte y clasificación que se observa, se encuentra integrado por un depósito de almacenamiento que posee una cadena
ELEMENTOS DE CONTROL Y SENSORES
 7 ELEMENTOS DE CONTROL Y SENSORES 7.1. Introducción Como se ha dicho en capítulos anteriores las principales señales de entrada al autómata son del tipo de pulsador, interruptor, termostatos, finales de
7 ELEMENTOS DE CONTROL Y SENSORES 7.1. Introducción Como se ha dicho en capítulos anteriores las principales señales de entrada al autómata son del tipo de pulsador, interruptor, termostatos, finales de
2).Diseñar los circuitos cuyas tablas de estados son las siguientes:
.Diseñar los circuitos cuyas tablas de estados son las siguientes:") EJERCICIOS Tema 7 Ejercicios Síncronos 1) Deduce las tablas de estado que se correponden con los siguientes diagramas de estado. 2).Diseñar los circuitos cuyas tablas de estados son las siguientes: 0 1
EJERCICIOS Tema 7 Ejercicios Síncronos 1) Deduce las tablas de estado que se correponden con los siguientes diagramas de estado. 2).Diseñar los circuitos cuyas tablas de estados son las siguientes: 0 1
41(T0)T.':#0&'4'4#T. Diseñar en VHDL un decodificador BCD a 7 segmentos que cumpla con las siguientes condiciones:
T.':#0&'4'4#T. Diseñar en VHDL un decodificador BCD a 7 segmentos que cumpla con las siguientes condiciones:") Diseñar en VHDL un decodificador BCD a 7 segmentos que cumpla con las siguientes condiciones: D Salidas activas en bajo para manejar display ánodo común E Entradas (4 bits) activas en bajo (o con lógica
Diseñar en VHDL un decodificador BCD a 7 segmentos que cumpla con las siguientes condiciones: D Salidas activas en bajo para manejar display ánodo común E Entradas (4 bits) activas en bajo (o con lógica
MANUAL DEL SUBSISTEMA DE DESARROLLO PROFESIONAL EN RHNET
 MANUAL DEL SUBSISTEMA DE DESARROLLO PROFESIONAL EN RHNET Unidad de Política de Recursos Humanos de la Administración Pública Federal Contenido I. SUBSISTEMA DE DESARROLLO PROFESIONAL DE CARRERA... 2 Objetivos...
MANUAL DEL SUBSISTEMA DE DESARROLLO PROFESIONAL EN RHNET Unidad de Política de Recursos Humanos de la Administración Pública Federal Contenido I. SUBSISTEMA DE DESARROLLO PROFESIONAL DE CARRERA... 2 Objetivos...
INSTITUTO TÉCNICO INDUSTRIAL FRANCISCO JOSÉ DE CALDAS TECNOLOGÍA ROBÓTICA
 INSTITUTO TÉCNICO INDUSTRIAL FRANCISCO JOSÉ DE CALDAS TECNOLOGÍA ROBÓTICA GUÍA 1: INTRODUCCIÓN A LA ROBÓTICA OBJETIVOS Repasar la historia de los robots industriales. Examinar aplicaciones de robots industriales.
INSTITUTO TÉCNICO INDUSTRIAL FRANCISCO JOSÉ DE CALDAS TECNOLOGÍA ROBÓTICA GUÍA 1: INTRODUCCIÓN A LA ROBÓTICA OBJETIVOS Repasar la historia de los robots industriales. Examinar aplicaciones de robots industriales.
1. Base: En todo momento un máximo de 50cm x 50 cm x 30 cm.
 Secundaria La ciudad medieval francesa de Carcasona esta en peligro, y debemos construir la muralla más grande y con mayor peso posible, de esa forma evitar sea robado el gran tesoro de la cuidad. Para
Secundaria La ciudad medieval francesa de Carcasona esta en peligro, y debemos construir la muralla más grande y con mayor peso posible, de esa forma evitar sea robado el gran tesoro de la cuidad. Para
Primera aproximación al aprendizaje automático.
 APRENDIZAJE Introducción al aprendizaje algorítmico José M. Sempere Departamento de Sistemas Informáticos y Computación Universidad Politécnica de Valencia Aprender: Tomar algo en la memoria [...] Adquirir
APRENDIZAJE Introducción al aprendizaje algorítmico José M. Sempere Departamento de Sistemas Informáticos y Computación Universidad Politécnica de Valencia Aprender: Tomar algo en la memoria [...] Adquirir
Índice. ! Introducción. ! Modos de marcha. ! Seguridad. ! Diagramas Grafcet jerarquizados
 1 Índice! Introducción! Modos de marcha! Seguridad! Diagramas Grafcet jerarquizados 2 Introducción! En el tema anterior hemos realizado el diagrama Grafcet teniendo en cuenta sólo funcionamiento normal
1 Índice! Introducción! Modos de marcha! Seguridad! Diagramas Grafcet jerarquizados 2 Introducción! En el tema anterior hemos realizado el diagrama Grafcet teniendo en cuenta sólo funcionamiento normal
4. Síntesis de un circuito secuencial síncrono
 4 Síntesis de un circuito secuencial síncrono El estudio del procedimiento de diseño de circuitos secuenciales síncronos se realiza mediante la aplicación a un sencillo ejemplo Los puntos a desarrollar
4 Síntesis de un circuito secuencial síncrono El estudio del procedimiento de diseño de circuitos secuenciales síncronos se realiza mediante la aplicación a un sencillo ejemplo Los puntos a desarrollar
F.R.H. DEPARTAMENTO MECÁNICA
 PARTE 1. ÁLGEBRA DE BOOLE. FUNCIONES LÓGICAS. DIAGRAMAS DE KARNAUGH. 1.1. Diseñar el circuito lógico, por minitérminos y simplificado por Karnaugh, de la siguiente tabla de verdad: 1.2. Para el circuito
PARTE 1. ÁLGEBRA DE BOOLE. FUNCIONES LÓGICAS. DIAGRAMAS DE KARNAUGH. 1.1. Diseñar el circuito lógico, por minitérminos y simplificado por Karnaugh, de la siguiente tabla de verdad: 1.2. Para el circuito
TEMA 4: CONTROL POR VARIABLES Hoja de ejercicios (Entregar el 7 -problema de examen-)
") MÉTODOS ESTADÍSTICOS PARA LA MEJORA DE LA CALIDAD INGENIERIA DE TELECOMUNICACIONES TEMA 4: CONTROL POR VARIABLES Hoja de ejercicios (Entregar el 7 -problema de examen-) 1. Un proceso industrial fabrica
MÉTODOS ESTADÍSTICOS PARA LA MEJORA DE LA CALIDAD INGENIERIA DE TELECOMUNICACIONES TEMA 4: CONTROL POR VARIABLES Hoja de ejercicios (Entregar el 7 -problema de examen-) 1. Un proceso industrial fabrica
PROGRAMACION DE UN MODELO DE VEHICULO BASICO RASTREADOR
 Laboratorio ARQ232_ Métodos computaciones en arquitectura. PROGRAMACION DE UN MODELO DE VEHICULO BASICO RASTREADOR Equipo KANDINSKY Christian Alvial _ Joaquin Basso _Jonathan Martinez _Cybill Muñoz + Katherine
Laboratorio ARQ232_ Métodos computaciones en arquitectura. PROGRAMACION DE UN MODELO DE VEHICULO BASICO RASTREADOR Equipo KANDINSKY Christian Alvial _ Joaquin Basso _Jonathan Martinez _Cybill Muñoz + Katherine
Robótica Mecanización, Automatización y Robotización Robótica y robots... 3
 Robótica... 2 Mecanización, Automatización y Robotización... 2 Robótica y robots... 3 Definiciones de robot... 3 Funcionamiento de un robot... 4 Entradas o Sensores... 5 Salidas o actuadores... 6 Realimentación...
Robótica... 2 Mecanización, Automatización y Robotización... 2 Robótica y robots... 3 Definiciones de robot... 3 Funcionamiento de un robot... 4 Entradas o Sensores... 5 Salidas o actuadores... 6 Realimentación...
Secretaría de Comunicaciones y Transportes Dirección General de Transporte Ferroviario y Multimodal
 SENERMEX Ingeniería y Sistemas SA de CV Consultoría en Tránsito y Transportes SC 10. PROYECTO EJECUTIVO 10.9 DISEÑO DE LOS SISTEMAS FERROVIARIOS 10.9.122 SIMULACIÓN DE MARCHA Secretaría de Comunicaciones
SENERMEX Ingeniería y Sistemas SA de CV Consultoría en Tránsito y Transportes SC 10. PROYECTO EJECUTIVO 10.9 DISEÑO DE LOS SISTEMAS FERROVIARIOS 10.9.122 SIMULACIÓN DE MARCHA Secretaría de Comunicaciones
Estructuras de Datos Orientadas a Objetos. Pseudocódigo y aplicaciones en C#.NET. Capítulo 9.- Grafos
 Capítulo 9.- Grafos Cuestionario 9.1 Se pueden representar los nodos de un grafo como un conjunto de elementos 9.2 Se pueden representar los arcos de un grafo como un conjunto de tuplas 9.3 Los grafos
Capítulo 9.- Grafos Cuestionario 9.1 Se pueden representar los nodos de un grafo como un conjunto de elementos 9.2 Se pueden representar los arcos de un grafo como un conjunto de tuplas 9.3 Los grafos
INSTITUTO POLITECNICO NACIONAL UNIDAD PROFESIONAL INTERDISCIPLINARIA DE BIOTECNOLOGIA DEPARTAMENTO DE CIENCIAS BASICAS
 MANUAL DE PRÁCTICAS DEL TALLER DE PROGRAMACIÒN PRACTICA NO.4 NOMBRE DE LA PRÁCTICA Operaciones con Escalares y Conceptos Básicos de Programación 4.1 OBJETIVO GENERAL El alumno conocerá el funcionamiento
MANUAL DE PRÁCTICAS DEL TALLER DE PROGRAMACIÒN PRACTICA NO.4 NOMBRE DE LA PRÁCTICA Operaciones con Escalares y Conceptos Básicos de Programación 4.1 OBJETIVO GENERAL El alumno conocerá el funcionamiento
Ejercicios de repaso. 1.- Diseñe un contador asíncrono ascendente módulo 16 utilizando 74XX76. Debe poseer RESET externo.
 Ejercicios de repaso 1.- Diseñe un contador asíncrono ascendente módulo 16 utilizando 74XX76. Debe poseer 2.- Diseñe un contador asíncrono descendente módulo 16 utilizando 74XX76. Debe poseer 3.- Diseñe
Ejercicios de repaso 1.- Diseñe un contador asíncrono ascendente módulo 16 utilizando 74XX76. Debe poseer 2.- Diseñe un contador asíncrono descendente módulo 16 utilizando 74XX76. Debe poseer 3.- Diseñe
ESTUDIO DEL SISTEMA DE UN BRAZO ROBOT .INDICE. Descripción de las partes de la máquina..pag. 3, 4 y 5. *Introducción.
 ESTUDIO DEL SISTEMA DE UN BRAZO ROBOT.INDICE. Descripción de las partes de la máquina..pag. 3, 4 y 5. *Introducción. *Motor paso a paso (Bipolar): Características y funcionamiento. *Descripción de las
ESTUDIO DEL SISTEMA DE UN BRAZO ROBOT.INDICE. Descripción de las partes de la máquina..pag. 3, 4 y 5. *Introducción. *Motor paso a paso (Bipolar): Características y funcionamiento. *Descripción de las
Laboratorio 3 Capa de Transporte (TCP)
") Redes de Datos Laboratorio - Informe Laboratorio 3 Capa de Transporte (TCP) Fecha: Estudiante: Estudiante: Estudiante: Puesto de trabajo: Firma: Firma: Firma: Procedimiento. Se recomienda salvar las capturas
Redes de Datos Laboratorio - Informe Laboratorio 3 Capa de Transporte (TCP) Fecha: Estudiante: Estudiante: Estudiante: Puesto de trabajo: Firma: Firma: Firma: Procedimiento. Se recomienda salvar las capturas
Examen 23 de Febrero de 2007
 Instrucciones Examen 23 de Febrero de 2007 Indique su nombre completo y número de cédula en cada hoja. Numere todas las hojas e indique la cantidad total de hojas que entrega en la primera. Escriba las
Instrucciones Examen 23 de Febrero de 2007 Indique su nombre completo y número de cédula en cada hoja. Numere todas las hojas e indique la cantidad total de hojas que entrega en la primera. Escriba las
UNIVERSIDAD NACIONAL DE INGENIERIA Facultad de Electrotecnia y Computación Departamento de Electrónica
 Control Aplicado 2010 Carrera: Ing. Electrónica Grupo: 5N2Eo Docente: Alejandro T Prof. Titular FEC - UNI alejandro.mendez@uni.edu.ni http://docentes.uni.edu.ni/fec/ En una planta industrial se producen
Control Aplicado 2010 Carrera: Ing. Electrónica Grupo: 5N2Eo Docente: Alejandro T Prof. Titular FEC - UNI alejandro.mendez@uni.edu.ni http://docentes.uni.edu.ni/fec/ En una planta industrial se producen
LOGGER DE TEMPERATURA AMBIENTAL H Manual del usuario
 Fecha edición 10/2013 N Versión 01 LOGGER DE TEMPERATURA AMBIENTAL H4036306 Manual del usuario INSTRUCCIONES DE FUNCIONAMIENTO DE REGISTRADOR DE TEMPERATURA MINI H4036306 I. VISIÓN GENERAL DEL PRODUCTO:
Fecha edición 10/2013 N Versión 01 LOGGER DE TEMPERATURA AMBIENTAL H4036306 Manual del usuario INSTRUCCIONES DE FUNCIONAMIENTO DE REGISTRADOR DE TEMPERATURA MINI H4036306 I. VISIÓN GENERAL DEL PRODUCTO:
PROCESO DE SINCRONIZACIÓN
 PROCESO DE SINCRONIZACIÓN Qué es sincronización? El proceso de sincronización consiste en migrar datos de SIIGO para que puedan ser trasladados y trabajados desde plantillas de Excel a través de fórmulas
PROCESO DE SINCRONIZACIÓN Qué es sincronización? El proceso de sincronización consiste en migrar datos de SIIGO para que puedan ser trasladados y trabajados desde plantillas de Excel a través de fórmulas
EL CARDADO DE LAS FIBRAS CORTAS Esta operación se realiza en las máquinas denominadas cardas.
 EL CARDADO DE LAS FIBRAS CORTAS Esta operación se realiza en las máquinas denominadas cardas. Los objetivos del cardado son: Separar y disgregar las fibras. Mezclar las fibras. Eliminar las impurezas que
EL CARDADO DE LAS FIBRAS CORTAS Esta operación se realiza en las máquinas denominadas cardas. Los objetivos del cardado son: Separar y disgregar las fibras. Mezclar las fibras. Eliminar las impurezas que
PROBLEMAS CINEMÁTICA
 1 PROBLEMAS CINEMÁTICA 1- La ecuación de movimiento de un cuerpo es, en unidades S.I., s=t 2-2t-3. Determina su posición en los instantes t=0, t=3 y t=5 s y calcula en qué instante pasa por origen de coordenadas.
1 PROBLEMAS CINEMÁTICA 1- La ecuación de movimiento de un cuerpo es, en unidades S.I., s=t 2-2t-3. Determina su posición en los instantes t=0, t=3 y t=5 s y calcula en qué instante pasa por origen de coordenadas.
TICA EN LA ESCUELA. El Robot (hardware) Alicia Escudero. Apellido y Nombre: Escudero Alicia. Tema: características de un robot
 Alicia Escudero. Apellido y Nombre: Escudero Alicia. Tema: características de un robot") Alicia Escudero ROBÓTICA TICA EN LA ESCUELA El Robot (hardware) Apellido y Nombre: Escudero Alicia Tema: características de un robot E-mail: alyy_94@hotmail.com D.N.I: 36.491.199 02/05/1994 Introducción
Alicia Escudero ROBÓTICA TICA EN LA ESCUELA El Robot (hardware) Apellido y Nombre: Escudero Alicia Tema: características de un robot E-mail: alyy_94@hotmail.com D.N.I: 36.491.199 02/05/1994 Introducción
Intervención de las funciones ejecutivas en las habilidades adaptativas prácticas
 APRENDIZAJE ESCOLAR Intervención de las funciones ejecutivas en las habilidades adaptativas prácticas Macarena Centenera Neuropsicóloga macarena.centenera@astrane.com Componentes de la función ejecutiva
APRENDIZAJE ESCOLAR Intervención de las funciones ejecutivas en las habilidades adaptativas prácticas Macarena Centenera Neuropsicóloga macarena.centenera@astrane.com Componentes de la función ejecutiva
CIRCUITOS SECUENCIALES
 CIRCUITOS SECUENCIALES 1 Obtener el cronograma del circuito de la figura, y caracterizarlo, sabiendo que parte del estado 000. 2 Obtener el cronograma del circuito de la figura. De qué circuito se trata?
CIRCUITOS SECUENCIALES 1 Obtener el cronograma del circuito de la figura, y caracterizarlo, sabiendo que parte del estado 000. 2 Obtener el cronograma del circuito de la figura. De qué circuito se trata?
HiPath 3000 Instrucciones de uso Teléfono OpenStage 15 T
 HiPath 3000 Instrucciones de uso Teléfono OpenStage 15 T Teclado de marcación Handset / auricular Teclas para realizar ajustes de ring y volumen. Altavoz Buzón de voz y Infos recibidos Display 2 líneas
HiPath 3000 Instrucciones de uso Teléfono OpenStage 15 T Teclado de marcación Handset / auricular Teclas para realizar ajustes de ring y volumen. Altavoz Buzón de voz y Infos recibidos Display 2 líneas
AUTOMATIZACIÓN INDUSTRIAL PROGRAMACIÓN EN LENGUAJE DE ESQUEMA DE CONTACTOS (I)
") 3º INGENIEÍA TÉCNICA INDUSTIAL, ESPECIALIDAD MECÁNICA AUTOMATIZACIÓN INDUSTIAL PÁCTICA 2 POGAMACIÓN EN LENGUAJE DE ESQUEMA DE CONTACTOS (I) ELEMENTOS DEL LENGUAJE KOP A UTILIZA EN ESTA PÁCTICA 1. Temporizadores
3º INGENIEÍA TÉCNICA INDUSTIAL, ESPECIALIDAD MECÁNICA AUTOMATIZACIÓN INDUSTIAL PÁCTICA 2 POGAMACIÓN EN LENGUAJE DE ESQUEMA DE CONTACTOS (I) ELEMENTOS DEL LENGUAJE KOP A UTILIZA EN ESTA PÁCTICA 1. Temporizadores
Apuntes de Regulación y Automatización. Prácticas y Problemas.
 TEMA 3. AUTOMATISMOS Y AUTÓMATAS PROGRAMABLES. IMPLEMENTACION DE GRAFCET. OBJETIVOS: Los diseños e introducidos en el tema anterior, se traducen de manera sencilla a unas funciones lógicas concretas, esta
TEMA 3. AUTOMATISMOS Y AUTÓMATAS PROGRAMABLES. IMPLEMENTACION DE GRAFCET. OBJETIVOS: Los diseños e introducidos en el tema anterior, se traducen de manera sencilla a unas funciones lógicas concretas, esta
 GLOSARIO: AUTOTANQUE Vehículo cerrado, camión tanque, semirremolque o remolque, destinado al transporte de líquidos, gases licuados o sólidos en suspensión. AUTOTRANSPORTE FEDERAL DE CARGA Es el porte
GLOSARIO: AUTOTANQUE Vehículo cerrado, camión tanque, semirremolque o remolque, destinado al transporte de líquidos, gases licuados o sólidos en suspensión. AUTOTRANSPORTE FEDERAL DE CARGA Es el porte
Manual de Usuario Cierre de Operaciones CC
 Manual de Usuario Cierre de Operaciones CC 1 / 8 Consideraciones: - Es importante que el usuario genere un respaldo de la Base de datos antes de hacer este proceso. - En caso de error de tiempo de espera,
Manual de Usuario Cierre de Operaciones CC 1 / 8 Consideraciones: - Es importante que el usuario genere un respaldo de la Base de datos antes de hacer este proceso. - En caso de error de tiempo de espera,
5 CLASIFICACION DE LAS PLANTAS FOTOVOLTAICAS COMERCIALES
 5 CLASIFICACION DE LAS PLANTAS FOTOVOLTAICAS COMERCIALES En Primer lugar, se va a realizar una clasificación de la tipología de los parques y las características que afectan a cada tipo de planta en relación
5 CLASIFICACION DE LAS PLANTAS FOTOVOLTAICAS COMERCIALES En Primer lugar, se va a realizar una clasificación de la tipología de los parques y las características que afectan a cada tipo de planta en relación
INSTRUCCION DE TRABAJO DE INNOVACION TECNOLOGICA EN ATENCION A USUARIOS
 INSTRUCCION DE TRABAJO DE INNOVACION TECNOLOGICA EN ATENCION A USUARIOS SUBDIRECCIÓN GENERAL DE MERCADOTECNIA 1 de 14 13/12/06 IT-DMPI-GME-01 Version 1.1 Derechos Reservados 2006 Consejo de Promoción Turística
INSTRUCCION DE TRABAJO DE INNOVACION TECNOLOGICA EN ATENCION A USUARIOS SUBDIRECCIÓN GENERAL DE MERCADOTECNIA 1 de 14 13/12/06 IT-DMPI-GME-01 Version 1.1 Derechos Reservados 2006 Consejo de Promoción Turística
Problema resuelto de Máquinas de estado.
 Problema resuelto de Máquinas de estado. Se desea diseñar un sistema de iluminación para un pasillo, de manera que cumpla con las siguientes especificaciones: El diseño estará basado en una máquina de
Problema resuelto de Máquinas de estado. Se desea diseñar un sistema de iluminación para un pasillo, de manera que cumpla con las siguientes especificaciones: El diseño estará basado en una máquina de
sincretec TimeTel 4.XX.YY Instalación VIL-1000 TimeTel Ver. 4.XX.YY Sincretec, S.A. de C.V. Rev Página 1 de 12
 Instalación VIL-1000 TimeTel Ver. 4.XX.YY Rev. 1.00 Sincretec, S.A. de C.V. Página 1 de 12 Elementos del VIL-1000 EL VIL-1000 está formado por 3 elementos: 1- Módulo principal VIL-1000 El módulo principal
Instalación VIL-1000 TimeTel Ver. 4.XX.YY Rev. 1.00 Sincretec, S.A. de C.V. Página 1 de 12 Elementos del VIL-1000 EL VIL-1000 está formado por 3 elementos: 1- Módulo principal VIL-1000 El módulo principal
HP EveryPage. Índice. Asegure un escaneo fácil y fiable. Información técnica
 Información técnica HP EveryPage Asegure un escaneo fácil y fiable Índice Visión general de la tecnología... 2 Ventajas... 2 Dispositivos que incluyen HP EveryPage 1... 2 Cómo funciona?... 3 Dos arquitecturas
Información técnica HP EveryPage Asegure un escaneo fácil y fiable Índice Visión general de la tecnología... 2 Ventajas... 2 Dispositivos que incluyen HP EveryPage 1... 2 Cómo funciona?... 3 Dos arquitecturas
Consultoría y Tecnología CONDUCE TU NEGOCIO A OTRO NIVEL
 Consultoría y Tecnología CONDUCE TU NEGOCIO A OTRO NIVEL Descripción BNX Gestión de Flotilla es un sistema de rastreo y localización que le permite tomar control de su flotilla de una manera simple y eficiente,
Consultoría y Tecnología CONDUCE TU NEGOCIO A OTRO NIVEL Descripción BNX Gestión de Flotilla es un sistema de rastreo y localización que le permite tomar control de su flotilla de una manera simple y eficiente,
Objetos de aprendizaje: Computadora
 MOMENTO I. BLOQUE 1. Opera las funciones básicas del sistema operativo y garantiza la seguridad de la información Objetos de aprendizaje: Computadora Lectura 1: La Computadora La computadora es una máquina
MOMENTO I. BLOQUE 1. Opera las funciones básicas del sistema operativo y garantiza la seguridad de la información Objetos de aprendizaje: Computadora Lectura 1: La Computadora La computadora es una máquina
XPRIMER.HCM es un software especialmente útil para organizaciones que presentan alguna de las siguientes situaciones: + Alta contratación
 Los Orígenes Los tiempos en los que el empleado era considerado únicamente como uno de los recursos de la empresa se han acabado. En la era del libre acceso al capital y tecnología, el personal se convierte
Los Orígenes Los tiempos en los que el empleado era considerado únicamente como uno de los recursos de la empresa se han acabado. En la era del libre acceso al capital y tecnología, el personal se convierte
MOTORES PASO A PASO. Se define un motor como aquella máquina eléctrica rotativa que es capaz de transformar energía eléctrica en energía mecánica.
 MOTORES PASO A PASO 1. INTRODUCCIÓN Se define un motor como aquella máquina eléctrica rotativa que es capaz de transformar energía eléctrica en energía mecánica. ENERGÍA ELÉCTRICA ENERGÍA MECÁNICA Figura
MOTORES PASO A PASO 1. INTRODUCCIÓN Se define un motor como aquella máquina eléctrica rotativa que es capaz de transformar energía eléctrica en energía mecánica. ENERGÍA ELÉCTRICA ENERGÍA MECÁNICA Figura
DEPARTAMENTO DE CIENCIAS DE LA ENERGIA Y MECANICA Laboratorio de Automatización Industrial Mecánica. TEMA: Control de procesos con Arduino.
 TEMA: Control de procesos con Arduino. Ejercicio: Controlando un proceso la ayuda de la tarjeta Arduino Objetivo: Mediante modulo Arduino, controlamos un proceso instrumentado mediante sensores y actuadores.
TEMA: Control de procesos con Arduino. Ejercicio: Controlando un proceso la ayuda de la tarjeta Arduino Objetivo: Mediante modulo Arduino, controlamos un proceso instrumentado mediante sensores y actuadores.
Introducción a la Automatización Industrial
 a la Automatización Industrial UPCO ICAI Departamento de Eletrónica y Automática 1 Qué es automatizar? PLANTA Agitador Conseguir que la PLANTA funcione de forma automática Reactivo ácido Reactivo alcalino
a la Automatización Industrial UPCO ICAI Departamento de Eletrónica y Automática 1 Qué es automatizar? PLANTA Agitador Conseguir que la PLANTA funcione de forma automática Reactivo ácido Reactivo alcalino
PRINCIPIOS DE SISTEMAS DE CONTROL
 PRINCIPIOS DE SISTEMAS DE CONTROL DEFINICIÓN DE AUTOMATIZACIÓN La Real Academia de Ciencias Exactas Físicas y Naturales define la Automática como el estudio de los métodos y procedimientos cuya finalidad
PRINCIPIOS DE SISTEMAS DE CONTROL DEFINICIÓN DE AUTOMATIZACIÓN La Real Academia de Ciencias Exactas Físicas y Naturales define la Automática como el estudio de los métodos y procedimientos cuya finalidad
Decodificadores y Demultiplexores. Pedro Fernández Ignacio de la Rosa
 Decodificadores y Demultiplexores Pedro Fernández Ignacio de la Rosa Decodificadores El trabajo de un decodificador, es recibir como entradas códigos en binario (N bits) y activar una de las M salidas,
Decodificadores y Demultiplexores Pedro Fernández Ignacio de la Rosa Decodificadores El trabajo de un decodificador, es recibir como entradas códigos en binario (N bits) y activar una de las M salidas,
Tipos de Filtros Introducción
 Tipos de Filtros Introducción Tanto en los circuitos eléctricos como los sistemas de comunicaciones, se desea manejar información la cual debe estar dentro de ciertas frecuencias. Pero, ciertos grupos
Tipos de Filtros Introducción Tanto en los circuitos eléctricos como los sistemas de comunicaciones, se desea manejar información la cual debe estar dentro de ciertas frecuencias. Pero, ciertos grupos
ANTECEDENTES DEL PROYECTO:
 Sist. Riego de Alta Eficiencia Parque Las Moreras (Leganés) ANTECEDENTES DEL PROYECTO: - Proyecto realizado por Helechos S.C. con el asesoramiento de Master Riego S.A. - Parque con una superficie aproximada
Sist. Riego de Alta Eficiencia Parque Las Moreras (Leganés) ANTECEDENTES DEL PROYECTO: - Proyecto realizado por Helechos S.C. con el asesoramiento de Master Riego S.A. - Parque con una superficie aproximada
NAVEGADORES GPS LUIS PIRES MIGUEL 1ºA BACH.
 NAVEGADORES GPS LUIS PIRES MIGUEL 1ºA BACH. ÍNDICE 1. INTRODUCCION 2. ELEMENTOS QUE LO COMPONEN 3. FUNCIONAMIENTO 4. ES FIABLE? 5. ERRORES DE LOS GPS 6. TIPOS DE GPS Y NAVEGADORES Los Navegadores Satelitales
NAVEGADORES GPS LUIS PIRES MIGUEL 1ºA BACH. ÍNDICE 1. INTRODUCCION 2. ELEMENTOS QUE LO COMPONEN 3. FUNCIONAMIENTO 4. ES FIABLE? 5. ERRORES DE LOS GPS 6. TIPOS DE GPS Y NAVEGADORES Los Navegadores Satelitales
Práctica 7. Gestión de emergencias y paradas
 Área de istemas y Automática Práctica 7. Gestión de emergencias y paradas En esta práctica se incluirán cuatro situaciones de parada a un proceso cuyo Grafcet y transcripción se acompaña. El proceso es
Área de istemas y Automática Práctica 7. Gestión de emergencias y paradas En esta práctica se incluirán cuatro situaciones de parada a un proceso cuyo Grafcet y transcripción se acompaña. El proceso es
PROBLEMAS: DINÁMICA_ENERGÍA_1 (Select)
") FÍSICA IES Los Álamos PROBLEMAS: DINÁMICA_ENERGÍA_1 (Select) 1. Explique y razone la veracidad o falsedad de las siguientes afirmaciones: a. El trabajo realizado por todas las fuerzas que actúan sobre
FÍSICA IES Los Álamos PROBLEMAS: DINÁMICA_ENERGÍA_1 (Select) 1. Explique y razone la veracidad o falsedad de las siguientes afirmaciones: a. El trabajo realizado por todas las fuerzas que actúan sobre
Robótica. Un robot...
 Robótica Un robot... La palabra robot está a la orden del día y muchas veces al escucharla nos imaginamos una máquina con forma humana que camina, habla, gesticula pero en realidad es algo mucho más sencillo.
Robótica Un robot... La palabra robot está a la orden del día y muchas veces al escucharla nos imaginamos una máquina con forma humana que camina, habla, gesticula pero en realidad es algo mucho más sencillo.
CIERRE Y APERTURA DE ESTACIONES DE SERVICIO INTERMITENTE
 NORMA ADIF DE REGLAMENTACIÓN Nº N/AA RE NAR Nº n/aa Madrid, 01 de diciembre de 2015 CIERRE Y APERTURA DE ESTACIONES DE SERVICIO INTERMITENTE 0. PREÁMBULO * * * * * * * * * Las estaciones de servicio intermitente
NORMA ADIF DE REGLAMENTACIÓN Nº N/AA RE NAR Nº n/aa Madrid, 01 de diciembre de 2015 CIERRE Y APERTURA DE ESTACIONES DE SERVICIO INTERMITENTE 0. PREÁMBULO * * * * * * * * * Las estaciones de servicio intermitente
Computación Cuántica Topológica PARTE 1
 Introducción a la Computación Cuántica Topológica PARTE Javier García IFAE / UAB Sumario - Computación clásica - Probabilidad - Mecánica cuántica - Computación cuántica Computación Clásica Computación
Introducción a la Computación Cuántica Topológica PARTE Javier García IFAE / UAB Sumario - Computación clásica - Probabilidad - Mecánica cuántica - Computación cuántica Computación Clásica Computación
Torre de Madereo de Alta Tecnología SIGU
 Torre de Madereo de Alta Tecnología SIGU La Torre de Madereo de Alta tecnología es una nueva versión de las Torres de Madereo de SIGU, que cuenta con un nuevo sistema de control para su operación. El sistema
Torre de Madereo de Alta Tecnología SIGU La Torre de Madereo de Alta tecnología es una nueva versión de las Torres de Madereo de SIGU, que cuenta con un nuevo sistema de control para su operación. El sistema
Aritmética de Enteros
 Aritmética de Enteros La aritmética de los computadores difiere de la aritmética usada por nosotros. La diferencia más importante es que los computadores realizan operaciones con números cuya precisión
Aritmética de Enteros La aritmética de los computadores difiere de la aritmética usada por nosotros. La diferencia más importante es que los computadores realizan operaciones con números cuya precisión
Expresión de Problemas y Algoritmos
 Expresión de Problemas y Algoritmos UNLP Curso de Ingreso 2013 Expresión de Problemas y Algoritmos Página 1 Contenido Objetivos 3 Temas a tratar 3 7.1 Introducción 4 7.2 Ejemplos 4 Ejemplo 7.1 4 Ejemplo
Expresión de Problemas y Algoritmos UNLP Curso de Ingreso 2013 Expresión de Problemas y Algoritmos Página 1 Contenido Objetivos 3 Temas a tratar 3 7.1 Introducción 4 7.2 Ejemplos 4 Ejemplo 7.1 4 Ejemplo
SISTEMAS PERSONA-MÁQUINA SON SISTEMAS EN LOS QUE EL HUMANO Y LA MÁQUINA TIENEN UNA RELACIÓN RECÍPROCA
 SON SISTEMAS EN LOS QUE EL HUMANO Y LA MÁQUINA TIENEN UNA RELACIÓN RECÍPROCA INTERPRETACIÓN Y DECISIÓN PERCEPCIÓN INSTRUMENTO DE DESPLIEGUE PRODUCCIÓN MANEJO DE LOS CONTROLES INSTRUMENTO DE CONTROL OPERADOR
SON SISTEMAS EN LOS QUE EL HUMANO Y LA MÁQUINA TIENEN UNA RELACIÓN RECÍPROCA INTERPRETACIÓN Y DECISIÓN PERCEPCIÓN INSTRUMENTO DE DESPLIEGUE PRODUCCIÓN MANEJO DE LOS CONTROLES INSTRUMENTO DE CONTROL OPERADOR
Manual de Usuario del Sistema Integral de Información Académica y. Administrativa, portal de Profesores
 Manual de Usuario del Sistema Integral de Información Académica y Octubre de 2014 Contenido 1. Información general... 1 2. Ingreso al sistema... 2 3. Operación del sistema... 3 3.1 Menú Calificaciones...
Manual de Usuario del Sistema Integral de Información Académica y Octubre de 2014 Contenido 1. Información general... 1 2. Ingreso al sistema... 2 3. Operación del sistema... 3 3.1 Menú Calificaciones...
Herramienta Procesar Notas-Notas de Crédito para notas negativas
 negativas Documentación Intelisis. Derechos Reservados. Publicado en http://docs.intelisis.info negativas 1 Introducción 1.1 Introducción 4 2 Con guración 2.1 Con guración 6 3 Funcionalidad 3.1 3.2 Herramienta
negativas Documentación Intelisis. Derechos Reservados. Publicado en http://docs.intelisis.info negativas 1 Introducción 1.1 Introducción 4 2 Con guración 2.1 Con guración 6 3 Funcionalidad 3.1 3.2 Herramienta
Una función es una correspondencia única entre dos conjuntos numéricos.
 FUNCIONES Qué es una función? Una función es una correspondencia entre dos conjuntos de números de modo que a cada valor del conjunto inicial, llamado dominio, se le hace corresponder un valor del conjunto
FUNCIONES Qué es una función? Una función es una correspondencia entre dos conjuntos de números de modo que a cada valor del conjunto inicial, llamado dominio, se le hace corresponder un valor del conjunto
EL TREN DE LEVITACIÓN MAGNÉTICA
 EL TREN DE LEVITACIÓN MAGNÉTICA Son varios los países que han trabajado en el desarrollo de los sistemas de levitación magnética en los ferrocarriles, aunque actualmente sólo Alemania y Japón tienen proyectos
EL TREN DE LEVITACIÓN MAGNÉTICA Son varios los países que han trabajado en el desarrollo de los sistemas de levitación magnética en los ferrocarriles, aunque actualmente sólo Alemania y Japón tienen proyectos
FUNCIONALIDADES e-netcamcounter
 FUNCIONALIDADES e-netcamcounter DT-FN-0110.v.1.0 IProNet Sistemas 2008 e-netcamcounter es la solución de conteo de IProNet Sistemas basada en análisis de vídeo. Solución para dar respuesta definitiva a
FUNCIONALIDADES e-netcamcounter DT-FN-0110.v.1.0 IProNet Sistemas 2008 e-netcamcounter es la solución de conteo de IProNet Sistemas basada en análisis de vídeo. Solución para dar respuesta definitiva a
ROZAMIENTO POR DESLIZAMIENTO
 ROZAMIENTO POR DESLIZAMIENTO 1. OBJETIVO Medida de los coeficientes de rozamiento estático y cinético en diferentes superficies. Cálculo del trabajo que se realiza para mover los bloques. 2.- FUNDAMENTOS
ROZAMIENTO POR DESLIZAMIENTO 1. OBJETIVO Medida de los coeficientes de rozamiento estático y cinético en diferentes superficies. Cálculo del trabajo que se realiza para mover los bloques. 2.- FUNDAMENTOS
UNIDAD 1: INTRODUCCIÓN A LOS SISTEMAS AUTOMATIZADOS
 UNIVERSIDAD ALONSO DE OJEDA FACULTAD DE INGENIERÍA ESCUELA DE COMPUTACIÓN AUTOMATIZACIÓN UNIDAD 1: INTRODUCCIÓN A LOS SISTEMAS AUTOMATIZADOS AUTOR: ING. GERARDO ALBERTO LEAL, MSc Concepto de Automatización.
UNIVERSIDAD ALONSO DE OJEDA FACULTAD DE INGENIERÍA ESCUELA DE COMPUTACIÓN AUTOMATIZACIÓN UNIDAD 1: INTRODUCCIÓN A LOS SISTEMAS AUTOMATIZADOS AUTOR: ING. GERARDO ALBERTO LEAL, MSc Concepto de Automatización.
El El Relevador. Técnicas de programación de un PLC. Esquema de contactos o Diagramas de Escalera Mnemónicos o Listado de Instrucciones.
 El El Relevador Técnicas de programación de un PLC Esquema de contactos o Diagramas de Escalera Mnemónicos o Listado de Instrucciones. Diagrama de Bloques Funcional El relevador Está formado por una bobina
El El Relevador Técnicas de programación de un PLC Esquema de contactos o Diagramas de Escalera Mnemónicos o Listado de Instrucciones. Diagrama de Bloques Funcional El relevador Está formado por una bobina
Introducción. Nombre de documento: Informe de Seguimiento. Palmira, Valle del Cauca.
 Introducción Precisando que el alcance inicial del análisis de subsistemas de movilidad, no consideraba entre estos el desarrollar un diagnostico del Transporte Publico Intermunicipal; pero que en el desarrollo
Introducción Precisando que el alcance inicial del análisis de subsistemas de movilidad, no consideraba entre estos el desarrollar un diagnostico del Transporte Publico Intermunicipal; pero que en el desarrollo
Respecto a los conceptos de velocidad y rapidez media, es correcto afirmar que
 Nº Guía práctica Movimiento II: movimientos con velocidad constante Física Estándar Anual Ejercicios PSU 1. 2. Respecto a los conceptos de velocidad y rapidez media, es correcto afirmar que I) II) III)
Nº Guía práctica Movimiento II: movimientos con velocidad constante Física Estándar Anual Ejercicios PSU 1. 2. Respecto a los conceptos de velocidad y rapidez media, es correcto afirmar que I) II) III)
6.Registros Almacenados.-
 TABLA DE CONTENIDOS DE JAMBALA V2.1 1. Software de Gestión.- 2. Acceso al Sistema.- 3. Menu Principal.- 4. Gestor On Line.- 5...Información y Configuración de Nodos.- 6.Registros Almacenados.- 1 1.- Software
TABLA DE CONTENIDOS DE JAMBALA V2.1 1. Software de Gestión.- 2. Acceso al Sistema.- 3. Menu Principal.- 4. Gestor On Line.- 5...Información y Configuración de Nodos.- 6.Registros Almacenados.- 1 1.- Software
LECCIÓN. 19 Reductores de velocidad
 108 LECCIÓN. 19 Reductores de velocidad Competencia. Construye y utiliza un sistema de frenado. Indicador. Interpreta resultados de sistema de frenado. INTRODUCCIÓN Toda máquina Cuyo movimiento sea generado
108 LECCIÓN. 19 Reductores de velocidad Competencia. Construye y utiliza un sistema de frenado. Indicador. Interpreta resultados de sistema de frenado. INTRODUCCIÓN Toda máquina Cuyo movimiento sea generado
Introducción a la programación del robot moway
 Introducción a la programación del robot moway Índice Introducción... 2 Diagramas de flujo... 2 Bloques de Movimiento... 5 Condicionales... 6 Bucles... 7 Operadores AND / OR... 8 Orden en los diagramas...
Introducción a la programación del robot moway Índice Introducción... 2 Diagramas de flujo... 2 Bloques de Movimiento... 5 Condicionales... 6 Bucles... 7 Operadores AND / OR... 8 Orden en los diagramas...
Modos de marchas y paradas. Presentación de la guía GEMMA. Descripción de la guía GEMMA
 Modos de marchas y paradas Presentación de la guía GEMMA Descripción de la guía GEMMA Utilización de la guía GEMMA Presentación de la guía GEMMA En un proceso productivo automatizado, aparecen contingencias
Modos de marchas y paradas Presentación de la guía GEMMA Descripción de la guía GEMMA Utilización de la guía GEMMA Presentación de la guía GEMMA En un proceso productivo automatizado, aparecen contingencias
1.1. Modelos de arquitecturas de cómputo: clásicas, segmentadas, de multiprocesamiento.
 1.1. Modelos de arquitecturas de cómputo: clásicas, segmentadas, de multiprocesamiento. Arquitecturas Clásicas. Estas arquitecturas se desarrollaron en las primeras computadoras electromecánicas y de tubos
1.1. Modelos de arquitecturas de cómputo: clásicas, segmentadas, de multiprocesamiento. Arquitecturas Clásicas. Estas arquitecturas se desarrollaron en las primeras computadoras electromecánicas y de tubos
Ayuda para el uso del correo electrónico oficial
 Ayuda para el uso del correo electrónico oficial 1 Contenido I.- Ingreso a la página del correo electrónico oficial del Supremo Tribunal de Justicia (STJ)... 3 II.- Ingresar a su bandeja de entrada...
Ayuda para el uso del correo electrónico oficial 1 Contenido I.- Ingreso a la página del correo electrónico oficial del Supremo Tribunal de Justicia (STJ)... 3 II.- Ingresar a su bandeja de entrada...
MANUAL DE PROCEDIMIENTOS DE COMPRAS EN EMPRESAS DE ALIMENTACIÓN
 2.09 MANUAL DE PROCEDIMIENTOS DE COMPRAS EN EMPRESAS DE ALIMENTACIÓN Dr. César Augusto Lerena Dr. Joaquín I. Lerena Assistance Food Argentina S.A. Copyright 2005 Rev: 20.06.09 1 MANUAL DE PROCEDIMIENTOS
2.09 MANUAL DE PROCEDIMIENTOS DE COMPRAS EN EMPRESAS DE ALIMENTACIÓN Dr. César Augusto Lerena Dr. Joaquín I. Lerena Assistance Food Argentina S.A. Copyright 2005 Rev: 20.06.09 1 MANUAL DE PROCEDIMIENTOS
Escalera elevadora ADAPTO. Fabricado por
 Escalera elevadora ADAPTO Fabricado por Botonera de pulsación constante que se controla directamente desde la plataforma. Escalera elevadora ADAPTO Dispone de varios elementos que garantizan la seguridad:
Escalera elevadora ADAPTO Fabricado por Botonera de pulsación constante que se controla directamente desde la plataforma. Escalera elevadora ADAPTO Dispone de varios elementos que garantizan la seguridad:
Sensores fotoeléctricos
 Sensores fotoeléctricos SA1U La exacta detección de los objetos es un imperativo para los sistemas de control. Con la confiable detección del objeto y la repetibilidad, se pueden tener muy pocas falsas
Sensores fotoeléctricos SA1U La exacta detección de los objetos es un imperativo para los sistemas de control. Con la confiable detección del objeto y la repetibilidad, se pueden tener muy pocas falsas
Manual JR72 V2.0 Arranque Automático para Motores a Explosión
 Manual JR72 V2.0 Arranque Automático para Motores a Explosión Descripción General El JR72 es un modulo compacto y económico que integra todas las funciones necesarias para poder automatizar de manera simple
Manual JR72 V2.0 Arranque Automático para Motores a Explosión Descripción General El JR72 es un modulo compacto y económico que integra todas las funciones necesarias para poder automatizar de manera simple
AUTOMATIZACIÓN INDUSTRIAL
 Departamento de Ingenieria de Sistemas y Automática AUTOMATIZACIÓN INDUSTRIAL 1 AUTOMATIZACION INDUSTRIAL 2 AUTOMATIZACION INDUSTRIAL 3 AUTOMATAS PROGRAMABLES Surgen de la necesidad de controlar automáticamente
Departamento de Ingenieria de Sistemas y Automática AUTOMATIZACIÓN INDUSTRIAL 1 AUTOMATIZACION INDUSTRIAL 2 AUTOMATIZACION INDUSTRIAL 3 AUTOMATAS PROGRAMABLES Surgen de la necesidad de controlar automáticamente
BOLETIN DE VENTAS SUZUKI DIVISIÓN AUTOMÓVILES. Estimados concesionarios:
 BOLETIN DE VENTAS SUZUKI DIVISIÓN AUTOMÓVILES Boletín: VA-13-020 Fecha: 18-06-13 Páginas: 5 TITULO: ACTUALIZACIÓN DE POLITICA AUTOS DEMO 2013 DIRIGIDO A: PROPIETARIOS, GERENTES GENERALES Y COMERCIALES
BOLETIN DE VENTAS SUZUKI DIVISIÓN AUTOMÓVILES Boletín: VA-13-020 Fecha: 18-06-13 Páginas: 5 TITULO: ACTUALIZACIÓN DE POLITICA AUTOS DEMO 2013 DIRIGIDO A: PROPIETARIOS, GERENTES GENERALES Y COMERCIALES
FÍSICA II ACTIVIDAD DE APRENDIZAJE EXPERIMENTAL Nº2. Magnetismo Corriente alterna
 Objetivos: FÍSICA II ACTIVIDAD DE APRENDIZAJE EXPERIMENTAL Nº Magnetismo Corriente alterna Comprobar la Ley de Faraday-Lenz (inducción electromagnética) Visualizar líneas de inducción magnéticas para distintas
Objetivos: FÍSICA II ACTIVIDAD DE APRENDIZAJE EXPERIMENTAL Nº Magnetismo Corriente alterna Comprobar la Ley de Faraday-Lenz (inducción electromagnética) Visualizar líneas de inducción magnéticas para distintas
Entendiendo el Modelo OSI
 Entendiendo el Modelo OSI Antes de continuar usted debe de leer: Qué es el modelo OSI? Estructura del modelo. Ejemplo del modelo. Introducción a Redes. Qué es el modelo OSI? OSI = Open System Interconnection,
Entendiendo el Modelo OSI Antes de continuar usted debe de leer: Qué es el modelo OSI? Estructura del modelo. Ejemplo del modelo. Introducción a Redes. Qué es el modelo OSI? OSI = Open System Interconnection,