DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA TRABAJO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TITULO DE INGENIERO EN MECATRÓNICA
|
|
|
- Jesús Flores Ojeda
- hace 5 años
- Vistas:
Transcripción
1 DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA TRABAJO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TITULO DE INGENIERO EN MECATRÓNICA
2 AUTORES: EDISSON ROBERTO ESCOBAR SAILEMA DAVID ALEJANDRO ZURITA ARBOLEDA DIRECTOR: ING. MARCO SINGAÑA Latacunga, Febrero del 2017

3 TEMA: DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE MANO ROBÓTICA CONTROLADO MEDIANTE ONDAS CEREBRALES

4 DESCRIPCIÓN DEL PROYECTO

5 SISTEMAS ANTROPOMÓRFICOS Fisiología de la mano humana

6 Referencia entre sus Falanges fp=fd+fm Mtc=fp+fm Grados de libertad en las articulaciones fp = Longitud de la falange proximal fd = Longitud de la falange distal fm = Longitud de la falange medial Mtc= Metacarpofalángica



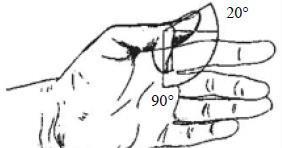
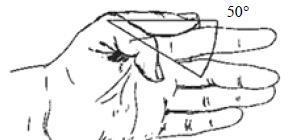
7 Ángulos limitantes para dedos meñique, anular, medio e índice
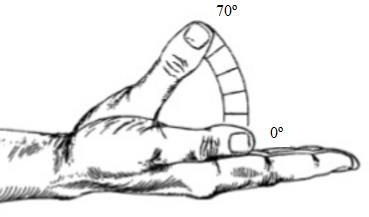
8 Ángulos limitantes para dedo pulgar
9 Movimientos
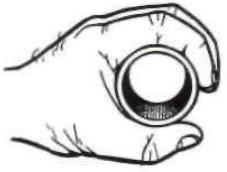
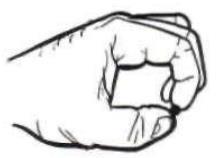



10 Movimiento cilíndrico Movimiento punta Movimiento esférico Movimiento gancho Movimiento lateral

11 Relación entre articulación metacarpofalángica y punta de dedo

12 Tabla de longitud y radio de falanges

13 Esquema de diseño con longitudes y radios modelo
14 DISEÑO DE FALANGES



15 Falange distal Cubierta palmar falange distal Falange medial Falange proximal
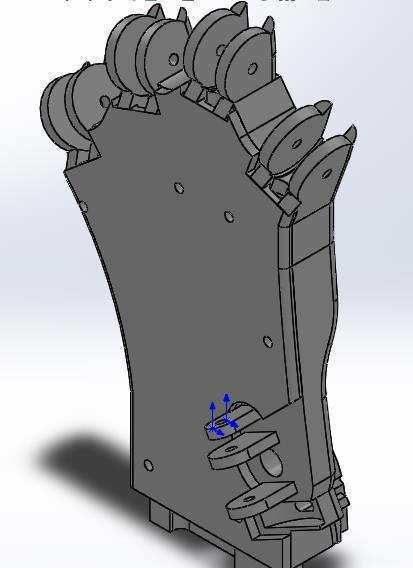
16 DISEÑO DE METACARPO



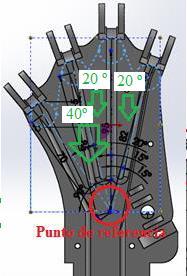
17 Ángulos de aducción designados para el diseño
18 DISEÑO DEL PULGAR




19 Falange distal Cubierta palmar falange distal Falange proximal Metacarpo Articulación carpometacarpiana
20 ENSAMBLAJE TOTAL
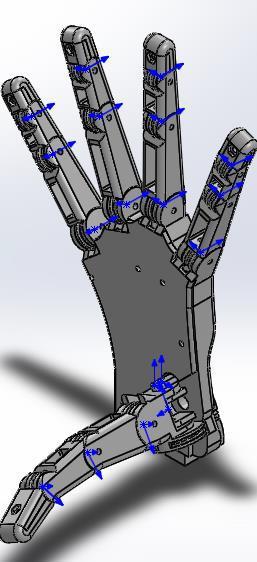
21
22 ANÁLISIS DE ESFUERZOS


23 Cálculo de áreas en zonas vulnerables Área: 3,93 mm 2
24 Cálculo de esfuerzo máximo Área= 3,93 mm 2 σt = Su FDS Área= 3,93 x10-6 m 2 FDS: 12 Su= 30MPa Esfuerzo máximo para el ABS σt = 30 MPa 12 σt=2,5 MPa
25 F = σt A F = 2,5MPa 3,93x10 6 m 2 F = 9,825 N

26 Análisis de esfuerzo de VonMises σt=2,7 MPa

27 Análisis del factor de seguridad FDS = 13

28 Análisis de la deformación máxima Deformación máxima 1,25 x 10-3 mm
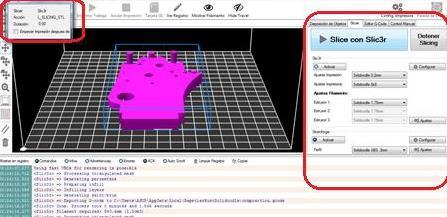
29 IMPRESIÓN EN PROTOTIPADORA SOLIDOODLE


30 Cambio de formato en piezas para prototipado
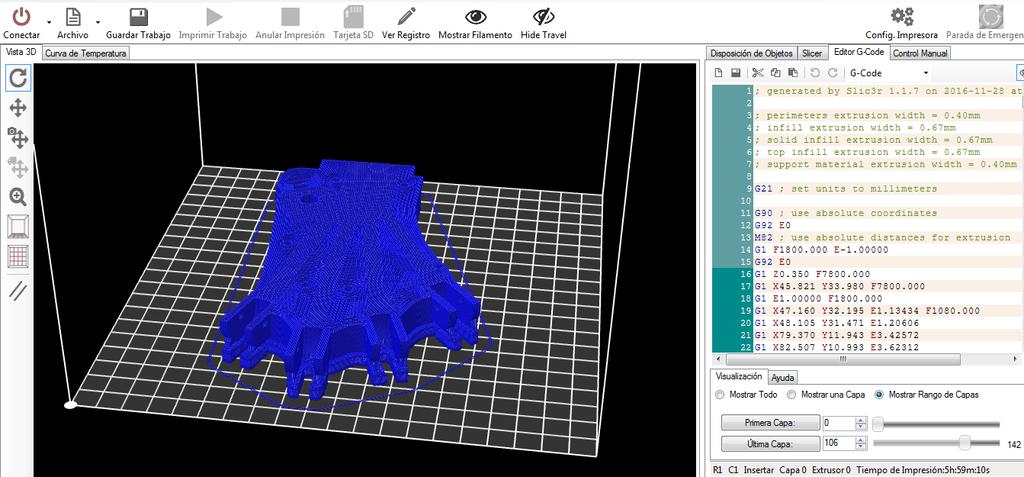
31 Creación de códigos G
32
33 Parámetros e impresión de piezas

34 Temperatura extrusor para ABS 1.75mm = 220 C Temperatura cama para ABS 1.75mm = 125 C SLICE con SLIC3R = 0.2MM
35 ENSAMBLAJE DE FALANGES



36 Ensamblaje de falange distal Anclaje de hilo Unión de distal palmar y dorsal
37 Acoplamiento de falanges y metacarpo



38 Acoplamiento de falanges mediante hilo Unión de articulaciones con eje de cobre Ensamble total

39 Ubicación de elásticos
40 ONDAS CEREBRALES Contamos con 5 tipos de ondas cerebrales: alfa, beta, delta, theta y gamma, predominantes en ciertos estados de conciencia, por lo cual pueden estar presentes todas al mismo tiempo
41 ONDA DELTA (0,1 Hz 3,99 Hz) Se presentan en estados de sueño profundo No se presenta en la actividad cerebral consiente Nunca llega a cero pues eso es la muerte cerebral
42 ONDA THETA (4 Hz 7,99 Hz) Se presentan en estados de sueño profundo No se presenta en la actividad cerebral consiente Nunca llega a cero pues eso es la muerte cerebral
43 ONDA ALFA (9 Hz 12,99 Hz) Se presentan antes de dormir Mas notables en momentos de relajación y descanso
44 ONDA BETA (14 Hz 30 Hz) Se presentan cuando la persona se encuentra despierta en alerta Al tener altos niveles de concentración
45 ONDA GAMMA (Superior a 30 Hz) Se las conoce como cognitivas de alto nivel Presentes en la fase REM del sueño
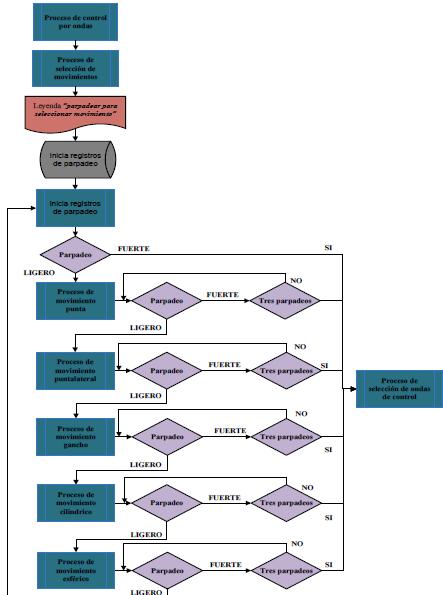
46 SELECCIÓN DE ONDAS Ondas alfa: se la selecciona como una onda de control por su accesibilidad y relacionándola en adelante con la meditación Ondas beta: seleccionada ya que su variación es controlada en estos consientes y relacionándola con la atención NOTA: el parpadeo no es considerado como una onda cerebral pero por su facilidad de adquisición se la utiliza para la selección mas no para el control
47 SOFTWARE PARA EL ANÁLISIS DE ONDAS Y CONTROL DE ACTUADORES Para este fin se selecciono LabView como el software de adquisición y control, esto debido a su compatibilidad con varios dispositivos de adquisición de ondas cerebrales y plataformas de control para servomotores como arduino la cual se ha seleccionado para el control de servomotores



48 SELECCIÓN DE EQUIPO DE LECTURA Se decide utilizar MindWave de NeuroSky ya que al igual que Epoc+ cuanta con la capacidad de adquisición de las ondas seleccionadas para el control, pero su compra en el país es fácil a un costo mas bajo


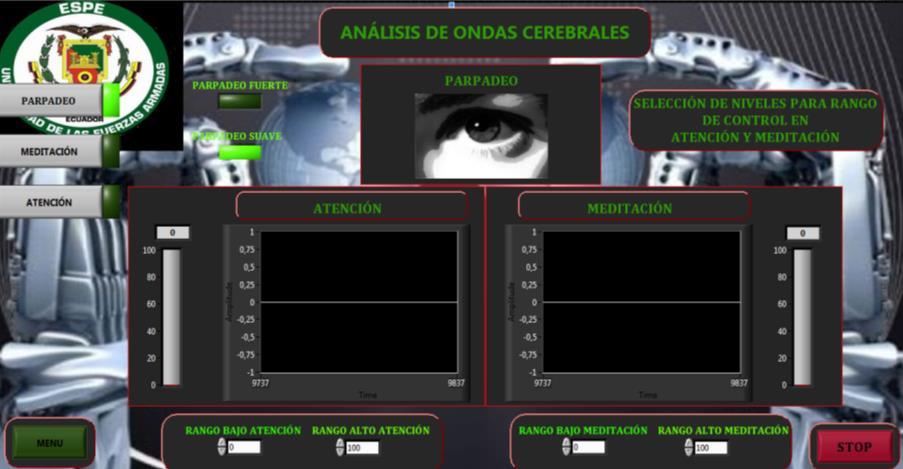
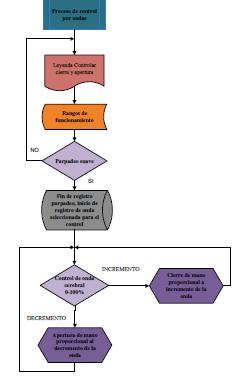
49 DESARROLLO DE LA APLICACIÓN Acondicionamiento de señales En el parpadeo se presenta como una magnitud adimensional comprendida entre 0 y 250; se acondiciona la señal para trabajar en dos rangos, parpadeo fuerte magnitud superior a 80 y parpadeo suave menor a 80; convirtiendo la señal analógica en un dato booleano La atención y la meditación se las adquiere en un rango de 0 a 100 % así que no requieren modificación en sus señales

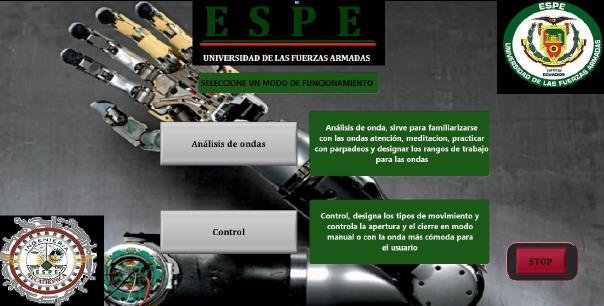

50 Creación de menú principal

51 Pantalla de análisis de ondas En esta pantalla se selecciona los rangos de control y se realiza practicas con ondas


52 Pantalla de control En esta pantalla se elegir en realizar un movimiento manual o control por ondas

53 Programación de ángulo de movilidad Se cargan ángulos de movilidad correspondientes a los ángulos limitantes de la mano humana


54 Pantalla de control manual Se selecciona el movimiento cuyo desplazamiento es controlado mediante el deslizador Porcentaje de apertura
55 Selección de movimiento
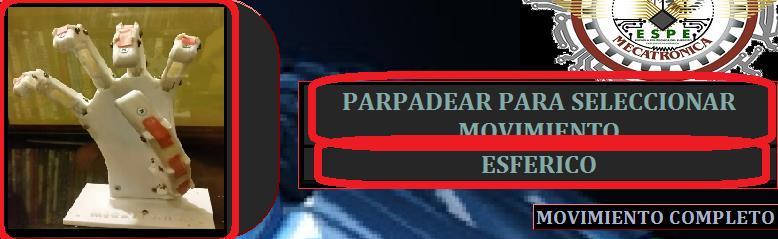
56


57 Selección de onda de control
58 Control de movimientos por ondas cerebrales

59
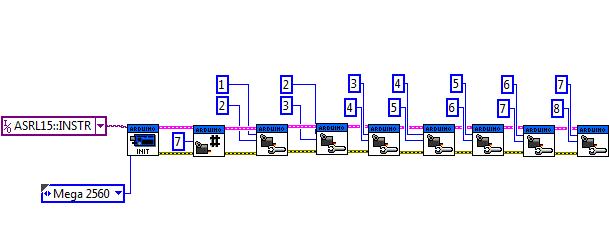
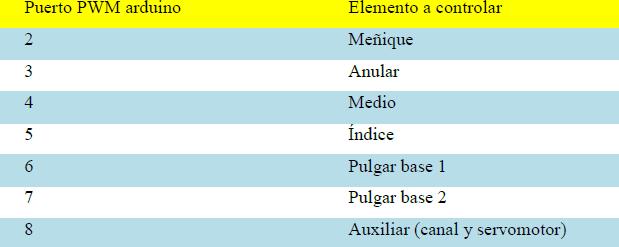
60 Designación de puertos para salida a plataforma arduino
61
62 ANÁLISIS DE FUERZAS Y TORQUES PARA LA SELECCIÓN DEL SERVOMOTOR

63 Medición de pesos y cálculo de torques

64 Selección del servomotor Ya que cumple con el torque requerido s selección el servomotor MG -996 r
65 UNIFICACIÓN DEL SISTEMA


66 Conexión de servomotores a su estructura Instalación de mano robótica en modulo de exposición

67 Conexión de servomotores con mano robótica
68 VALIDACIÓN DE HIPÓTESIS Planteamiento de la hipótesis Mediante las ondas cerebrales es posible controlar un prototipo de mano robótica con arquitectura antropomórfica? Planteamiento de la hipótesis alternativa y nula Hipótesis alternativa (H1): Mediante el uso de ondas cerebrales se puede llegar a controlar un prototipo de mano robótica con arquitectura antropomórfica. Hipótesis nula (H0): Mediante el uso de ondas cerebrales no se puede llegar a controlar un prototipo de mano robótica con arquitectura antropomórfica. Designación de variables Variable dependiente: Control de mano robótica con arquitectura antropomórfica Variable independiente: Dominio en el uso de ondas cerebrales
69 VALIDACIÓN DE HIPÓTESIS MUESTRA : Seis hombres, tres mujeres Valores obtenidos en pruebas de control

70 VALIDACIÓN DE HIPÓTESIS MUESTRA : Seis hombres, tres mujeres Suma de valores obtenidos en pruebas de control
71 VALIDACIÓN DE HIPÓTESIS MUESTRA : Seis hombres, tres mujeres Valores esperados
72 CÁLCULO DE CHI CUADRADO Ecuación del chi cuadrado x 2 calc = fo fe 2 fe Dónde: fe Frecuencia de valor esperado fo Frecuencia de valor observado
73 x 2 calc = x 2 calc = 5.11 Cálculo de grado de libertad gl = numero de filas 1 (numero de columnas 1 gl = 2 1 (2 1 gl = 1
 y el grado de libertad x 2 tabla = 3.")
74 Valor de chi-cuadrado obtenido de la tabla mediante la significancia (0,05) y el grado de libertad x 2 tabla =
75 Para el análisis se utiliza la siguiente condición: Si x 2 calc x 2 tabla, se acepta la hipótesis nula y se rechaza la alternativa y si (x 2 calc x 2 tabla, se acepta la hipótesis alternativa y se rechaza la nula Por lo tanto, mediante los cálculos se tiene que: x 2 calc x 2 tabla Por esta razón se rechaza la hipótesis nula y se acepta la hipótesis alternativa, concluyendo de esta manera que si se puede controlar un prototipo de mano robótica con arquitectura antropomórfica mediante el uso de ondas cerebrales
76 CONCLUSIONES El diseño y construcción del prototipo de mano robótica de tipo antropomórfico, fue posible realizarlo mediante características de la anatomía de la mano humana, lo cual le permitió la imitación de los tipos de agarre punta, lateral, gancho, cilíndrico y esférico, que son controlados en su cierre y apertura mediante ondas cerebrales La emulación de las características antropomórficas de la mano humana en la mano robótica, se alcanzó mediante la relación entre las dimensiones de las falanges, sus grados de libertad y ángulos de movilidad en cada uno de sus dedos, por lo cual fue necesario utilizar una restricción mecánica, es decir que poseen topes físicos que impiden sobrepasar los movimientos especificados La versatilidad del movimiento de las falanges es directamente proporcional a los grados de libertad de cada dedo y éste a su vez con el sistema de transmisión que se utilice Por medio de un análisis de los diversos tipos de ondas que genera el cerebro, se seleccionó el uso de la onda alpha (meditación) y beta (atención), las mismas que pueden ser fácilmente generadas por el humano para el control de la mano robótica.
77 Las ondas cerebrales de atención y meditación al ser generados por estados mentales son susceptibles a estímulos externos como distracciones, sonidos, sensaciones, olores, etc., lo que pudiera provocar la pérdida de control Las ondas cerebrales no se pueden utilizar directamente, debido a que estas son inestables, por lo cual es necesario su acondicionamiento por hardware o software para generar estabilidad proporcional en cada una de ellas La calibración de tiempos de ejecución interna del programa, es clave para un correcto intercambio de datos, pues esta debe ir a la par de la velocidad de transmisión de ondas dada por el lector La pantalla análisis de onda de la aplicación permite al usuario practicar con las señales de meditación, atención y adicionalmente el parpadeo, logrando adquirir la habilidad de control sobre estas ondas y en la mano robótica o cualquier mecanismo que se utilice La aplicación permite calibrar el rango alto y bajo de la amplitud de onda de atención y meditación, para el control de apertura de los dedos de la mano robótica; permitiéndole al usuario lograr maniobrar con mayor facilidad Se puede seleccionar y ejecutar el movimiento de los tipos de agarre de manera manual en la pantalla control de la aplicación, variando el porcentaje de apertura y cierre, mediante un control virtual pointer slide
DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA
 DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA EN MECATRÓNICA TRABAJO DE TITULACIÓN, PREVIO A LA OBTENCIÓN DEL TITULO DE INGENIERO EN MECATRÓNICA TEMA: DISEÑO Y CONSTRUCCIÓN DE
DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA EN MECATRÓNICA TRABAJO DE TITULACIÓN, PREVIO A LA OBTENCIÓN DEL TITULO DE INGENIERO EN MECATRÓNICA TEMA: DISEÑO Y CONSTRUCCIÓN DE
Universidad Católica de Cuenca Unidad Académica de Ingeniería de Sistemas, Eléctrica y Electrónica. Informe técnico presentando las posibles
 Universidad Católica de Cuenca Unidad Académica de Ingeniería de Sistemas, Eléctrica y Electrónica Informe Técnico Nro. 2 Objetivo específico Medio de verificación Informe técnico presentando las posibles
Universidad Católica de Cuenca Unidad Académica de Ingeniería de Sistemas, Eléctrica y Electrónica Informe Técnico Nro. 2 Objetivo específico Medio de verificación Informe técnico presentando las posibles
Universidad Católica de Cuenca Unidad Académica de Ingeniería de Sistemas, Eléctrica y Electrónica
 Universidad Católica de Cuenca Unidad Académica de Ingeniería de Sistemas, Eléctrica y Electrónica Informe Técnico Nro. 6.1 Objetivo específico 1.6- Evaluar numéricamente el comportamiento de la prótesis
Universidad Católica de Cuenca Unidad Académica de Ingeniería de Sistemas, Eléctrica y Electrónica Informe Técnico Nro. 6.1 Objetivo específico 1.6- Evaluar numéricamente el comportamiento de la prótesis
KATHERINE MARCELA MONTENEGRO MENA SANTIAGO XAVIER ILLESCAS BONILLA. Latacunga
 REDISEÑO E IMPLEMENTACIÓN DE UNA IMPRESORA FLEXOGRÁFICA DE DOS COLORES PARA PLÁSTICO, CON ADAPTACIÓN DE DESBOBINADO Y REBOBINADO DE MATERIA PRIMA PARA LA PRODUCCIÓN EN SERIE DE LA EMPRESA INPLASTICO DE
REDISEÑO E IMPLEMENTACIÓN DE UNA IMPRESORA FLEXOGRÁFICA DE DOS COLORES PARA PLÁSTICO, CON ADAPTACIÓN DE DESBOBINADO Y REBOBINADO DE MATERIA PRIMA PARA LA PRODUCCIÓN EN SERIE DE LA EMPRESA INPLASTICO DE
AUTORES: ALBA ESTEFANÍA PILATASIG ZAMBRANO GUIDO SANTIAGO NÚÑEZ VILLACÍS DIRECTOR: ING. FAUSTO ACUÑA LATACUNGA
 ANÁLISIS DE LOS GRADOS DE LIBERTAD NECESARIOS PARA EL DISEÑO E IMPLEMENTACIÓN DE UN INTERPRETE HUMANOIDE PARA EL MEJORAMIENTO DE LA MOTRICIDAD GRUESA EN NIÑOS CON CAPACIDADES ESPECIALES EN LA UNIDAD EDUCATIVA
ANÁLISIS DE LOS GRADOS DE LIBERTAD NECESARIOS PARA EL DISEÑO E IMPLEMENTACIÓN DE UN INTERPRETE HUMANOIDE PARA EL MEJORAMIENTO DE LA MOTRICIDAD GRUESA EN NIÑOS CON CAPACIDADES ESPECIALES EN LA UNIDAD EDUCATIVA
Ing. Fausto Acuña. Codirector: Ing. Marco Singaña. 19 de Agosto Latacunga 2015
 DISEÑO E IMPLEMENTACIÓN DEL SISTEMA DE CONTROL DEL TORSO DE UN INTÉRPRETE HUMANOIDE DE MÚLTIPLES GRADOS DE LIBERTAD PARA LA ENSEÑANZA DEL LENGUAJE DE SEÑAS BÁSICAS PARA NIÑOS CON DISCAPACIDAD AUDITIVA
DISEÑO E IMPLEMENTACIÓN DEL SISTEMA DE CONTROL DEL TORSO DE UN INTÉRPRETE HUMANOIDE DE MÚLTIPLES GRADOS DE LIBERTAD PARA LA ENSEÑANZA DEL LENGUAJE DE SEÑAS BÁSICAS PARA NIÑOS CON DISCAPACIDAD AUDITIVA
EXTENSIÓN - LATACUNGA CARRERA DE INGENIERÍA AUTOMOTRIZ
 EXTENSIÓN - LATACUNGA CARRERA DE INGENIERÍA AUTOMOTRIZ TEMA: "DISEÑO Y CONSTRUCCIÓN DE UN BANCO DIDÁCTICO PARA PRUEBAS DEL SISTEMA ELECTRÓNICO DE ESTABILIDAD MEDIANTE EL CONTROL DE FRENADO AUTORES: CRISTIAN
EXTENSIÓN - LATACUNGA CARRERA DE INGENIERÍA AUTOMOTRIZ TEMA: "DISEÑO Y CONSTRUCCIÓN DE UN BANCO DIDÁCTICO PARA PRUEBAS DEL SISTEMA ELECTRÓNICO DE ESTABILIDAD MEDIANTE EL CONTROL DE FRENADO AUTORES: CRISTIAN
CAPA SUPERFICIAL Músculo Origen Inserción Inervación Acción Principal. Tercio medio de la cara lateral del radio. Base del 2 metacarpiano
 Músculos Anteriores del Antebrazo CAPA SUPERFICIAL Pronador Redondo Epicóndilo medial del húmero y apófisis coronoides del cúbito Tercio medio de la cara lateral del radio Prona y flexiona el antebrazo
Músculos Anteriores del Antebrazo CAPA SUPERFICIAL Pronador Redondo Epicóndilo medial del húmero y apófisis coronoides del cúbito Tercio medio de la cara lateral del radio Prona y flexiona el antebrazo
TUBO DE QUINCKE ONDAS ESTACIONARIAS
 TUBO DE QUINCKE ONDAS ESTACIONARIAS 1.- OBJETIVO Estudio de ondas acústicas y su propagación en el interior del tubo de Quincke. Cálculo de la velocidad de propagación del sonido en el aire. 2.- FUNDAMENTO
TUBO DE QUINCKE ONDAS ESTACIONARIAS 1.- OBJETIVO Estudio de ondas acústicas y su propagación en el interior del tubo de Quincke. Cálculo de la velocidad de propagación del sonido en el aire. 2.- FUNDAMENTO
Programación Arduino Con Visualino
 Programación Arduino Con Visualino Ponente: Ing. Patricio Tisalema ROBOTS FAMOSOS Y NO TAN FAMOSOS PERO SÍ CERCANOS QUÉ ES ROBOT? Es un sistema electro-mecánico que por su apariencia de movimientos, ofrece
Programación Arduino Con Visualino Ponente: Ing. Patricio Tisalema ROBOTS FAMOSOS Y NO TAN FAMOSOS PERO SÍ CERCANOS QUÉ ES ROBOT? Es un sistema electro-mecánico que por su apariencia de movimientos, ofrece
INSTRUMENTACION TEMARIO
 INSTRUMENTACION TEMARIO 1. Introducción a la toma de medidas en sistemas físicos 2. Sensores y Transductores 3. Acondicionamiento de la señal: amplificación, normalización y filtrado 4. Sistemas de adquisición
INSTRUMENTACION TEMARIO 1. Introducción a la toma de medidas en sistemas físicos 2. Sensores y Transductores 3. Acondicionamiento de la señal: amplificación, normalización y filtrado 4. Sistemas de adquisición
MECHANICAL DESIGN OF A PROTOTYPE OF HAND PROSTHETICS
 1 Diseño Mecánico de un Prototipo de Prótesis de Mano MECHANICAL DESIGN OF A PROTOTYPE OF HAND PROSTHETICS Mayra Daniela Yépez Rosero 1, Carlos Alfonso Villarreal Bolaños 2 Resumen El presente proyecto
1 Diseño Mecánico de un Prototipo de Prótesis de Mano MECHANICAL DESIGN OF A PROTOTYPE OF HAND PROSTHETICS Mayra Daniela Yépez Rosero 1, Carlos Alfonso Villarreal Bolaños 2 Resumen El presente proyecto
DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA. Diego Fabian Morales Reinoso
 DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA PROYECTO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERÍA EN MECATRÓNICA Diego Fabian Morales Reinoso TUTOR: Ing. Marco Singaña Latacunga,
DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA PROYECTO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERÍA EN MECATRÓNICA Diego Fabian Morales Reinoso TUTOR: Ing. Marco Singaña Latacunga,
SÍNTESIS EVOLUTIVA DE MECANISMOS APLICADA AL DISEÑO DE UN EXOESQUELETO PARA LA REHABILITACIÓN DE LOS DEDOS DE LA MANO
 SÍNTESIS EVOLUTIVA DE MECANISMOS APLICADA AL DISEÑO DE UN EXOESQUELETO PARA LA REHABILITACIÓN DE LOS DEDOS DE LA MANO Alex Bataller, Juan A. Cabrera, Juan Jesús Castillo, Fernando Nadal Área de Ingeniería
SÍNTESIS EVOLUTIVA DE MECANISMOS APLICADA AL DISEÑO DE UN EXOESQUELETO PARA LA REHABILITACIÓN DE LOS DEDOS DE LA MANO Alex Bataller, Juan A. Cabrera, Juan Jesús Castillo, Fernando Nadal Área de Ingeniería
Músculo Origen Inserción Inervación Acción Principal. Tercio medio de la cara lateral del radio. Base del 2 metacarpiano
 Pronador Redondo Músculos Anteriores del Antebrazo Epicóndilo medial del húmero y apófisis coronoides del cúbito Tercio medio de la cara lateral del radio Prona y flexiona el antebrazo (por el codo) Flexor
Pronador Redondo Músculos Anteriores del Antebrazo Epicóndilo medial del húmero y apófisis coronoides del cúbito Tercio medio de la cara lateral del radio Prona y flexiona el antebrazo (por el codo) Flexor
La ciencia sin religión está coja y la religión sin ciencia está ciega
 La ciencia sin religión está coja y la religión sin ciencia está ciega Albert Einstein Así como el hierro se oxida por falta de uso, así también la inactividad destruye el intelecto Leonardo da Vinci RESUMEN
La ciencia sin religión está coja y la religión sin ciencia está ciega Albert Einstein Así como el hierro se oxida por falta de uso, así también la inactividad destruye el intelecto Leonardo da Vinci RESUMEN
PRACTICA N 3 ADQUISICIÓN DE DATOS DE TEMPERATURA Y VELOCIDAD
 PRACTICA N 3 ADQUISICIÓN DE DATOS DE TEMPERATURA Y VELOCIDAD Fecha de entrega: 28 de septiembre Durante la realización de esta práctica el estudiante debe familiarizarse con el uso de dos tipos de sensores:
PRACTICA N 3 ADQUISICIÓN DE DATOS DE TEMPERATURA Y VELOCIDAD Fecha de entrega: 28 de septiembre Durante la realización de esta práctica el estudiante debe familiarizarse con el uso de dos tipos de sensores:
AUTORES: JONATHAN PAÚL AIMACAÑA MOLINA DENNIS PAÚL MONTERO JIMÉNEZ DIRECTOR: ING. ANDRÉS GORDÓN LATACUNGA 2016
 ANÁLISIS Y DISEÑO DE UN SISTEMA MECATRÓNICO QUE EMPLEA VISIÓN ARTIFICIAL PARA EL DESARROLLO DE UN EQUIPO DE NEUROREHABILITACIÓN ENFOCADO A PACIENTES CON DEFICIENCIA MOTRIZ EN LAS MANOS AUTORES: JONATHAN
ANÁLISIS Y DISEÑO DE UN SISTEMA MECATRÓNICO QUE EMPLEA VISIÓN ARTIFICIAL PARA EL DESARROLLO DE UN EQUIPO DE NEUROREHABILITACIÓN ENFOCADO A PACIENTES CON DEFICIENCIA MOTRIZ EN LAS MANOS AUTORES: JONATHAN
DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA MECATRÓNICA
 DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA MECATRÓNICA TRABAJO DE TITULACIÓN, PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERA EN MECATRÓNICA INVESTIGACIÓN DE UN SISTEMA ELECTRÓNICO
DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA MECATRÓNICA TRABAJO DE TITULACIÓN, PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERA EN MECATRÓNICA INVESTIGACIÓN DE UN SISTEMA ELECTRÓNICO
DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA CARRERA DE INGENIERÍA ELECTRÓNICA E INSTRUMENTACIÓN
 DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA CARRERA DE INGENIERÍA ELECTRÓNICA E INSTRUMENTACIÓN PROYECTO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN ELECTRÓNICA E INSTRUMENTACIÓN CHICAISA
DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA CARRERA DE INGENIERÍA ELECTRÓNICA E INSTRUMENTACIÓN PROYECTO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN ELECTRÓNICA E INSTRUMENTACIÓN CHICAISA
DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA MECATRÓNICA
 DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA MECATRÓNICA TRABAJO DE TITULACIÓN, PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO MECATRÓNICO TEMA: DISEÑO E IMPLEMENTACIÓN DE UNA
DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA MECATRÓNICA TRABAJO DE TITULACIÓN, PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO MECATRÓNICO TEMA: DISEÑO E IMPLEMENTACIÓN DE UNA
DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE CORTADORA POR LÁSER DE DIÓXIDO DE CARBONO CON CONTROL NUMÉRICO COMPUTARIZADO PARA
 DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE CORTADORA POR LÁSER DE DIÓXIDO DE CARBONO CON CONTROL NUMÉRICO COMPUTARIZADO PARA EL LABORATORIO CNC DE LA ESPE EXTENSIÓN LATACUNGA LUGMANIA BALLADAREZ,CARLOS SANTIAGO
DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE CORTADORA POR LÁSER DE DIÓXIDO DE CARBONO CON CONTROL NUMÉRICO COMPUTARIZADO PARA EL LABORATORIO CNC DE LA ESPE EXTENSIÓN LATACUNGA LUGMANIA BALLADAREZ,CARLOS SANTIAGO
AUTORES: NURY ORTIZ SEBASTIÁN JÁCOME DIRECTOR: ING. ALEXANDER IBARRA
 DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE SILENCIADOR DE SONIDO VARIABLE PARA SISTEMAS DE ESCAPE DE MOTORES DE COMBUSTIÓN INTERNA DE CUATRO TIEMPOS DE 200cc AUTORES: NURY ORTIZ SEBASTIÁN JÁCOME DIRECTOR:
DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE SILENCIADOR DE SONIDO VARIABLE PARA SISTEMAS DE ESCAPE DE MOTORES DE COMBUSTIÓN INTERNA DE CUATRO TIEMPOS DE 200cc AUTORES: NURY ORTIZ SEBASTIÁN JÁCOME DIRECTOR:
Robótica aplicada con labview y lego
 Robótica aplicada con labview y lego Pedro Ponce Cruz Víctor M. de la Cueva Hernández Hiram Ponce Espinosa Selecciona la imagen para entrar Capítulo 1 Introducción a la robótica Continuar Introducción
Robótica aplicada con labview y lego Pedro Ponce Cruz Víctor M. de la Cueva Hernández Hiram Ponce Espinosa Selecciona la imagen para entrar Capítulo 1 Introducción a la robótica Continuar Introducción
Aplicación MultiVIR. Manual de usuario. Plataforma Multifunción con Instrumentación Virtual
 Plataforma Multifunción con Instrumentación Virtual MANUAL DE USUARIO Para poder trabajar con la aplicación MultiVIR, primero el usuario debe abrir el programa LabVIEW, teniendo que hacer doble clic para
Plataforma Multifunción con Instrumentación Virtual MANUAL DE USUARIO Para poder trabajar con la aplicación MultiVIR, primero el usuario debe abrir el programa LabVIEW, teniendo que hacer doble clic para
Unidad II - Ondas. 2 Ondas. 2.1 Vibración. Te has preguntado: o Cómo escuchamos? o Cómo llega la señal de televisión o de radio a nuestra casa?
 Unidad II Ondas Unidad II - Ondas 2 Ondas Te has preguntado: o Cómo escuchamos? o Cómo llega la señal de televisión o de radio a nuestra casa? o Cómo es posible que nos comuniquemos por celular? o Cómo
Unidad II Ondas Unidad II - Ondas 2 Ondas Te has preguntado: o Cómo escuchamos? o Cómo llega la señal de televisión o de radio a nuestra casa? o Cómo es posible que nos comuniquemos por celular? o Cómo
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES
 INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE CONTROL DE MOTORES ELÉCTRICOS PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno controlará motores eléctricos mediante
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE CONTROL DE MOTORES ELÉCTRICOS PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno controlará motores eléctricos mediante
Diseño y Construcción de un Prototipo Funcional Controlado por Computadora para la Rehabilitación de Codo y Muñeca
 Diseño y Construcción de un Prototipo Funcional Controlado por Computadora para la Rehabilitación de Codo y Muñeca GABRIELA MOYA STEPHANIE VÁSQUEZ Universidad de las Fuerzas Armadas - ESPE Sangolquí, ECUADOR
Diseño y Construcción de un Prototipo Funcional Controlado por Computadora para la Rehabilitación de Codo y Muñeca GABRIELA MOYA STEPHANIE VÁSQUEZ Universidad de las Fuerzas Armadas - ESPE Sangolquí, ECUADOR
CONCEPTO DE DISEÑO DE UNA PLATAFORMA DE MEDIDA ACÚSTICA UNIVERSIDAD CARLOS III DE MADRID
 CONCEPTO DE DISEÑO DE UNA PLATAFORMA DE MEDIDA ACÚSTICA UNIVERSIDAD CARLOS III DE MADRID Tutor: Dr.Eng. Zbigniew Sliwa Cotutor: Ana Muñoz Sanchez Estudiante: Manuel Castrillo Molina 1. Introducción En
CONCEPTO DE DISEÑO DE UNA PLATAFORMA DE MEDIDA ACÚSTICA UNIVERSIDAD CARLOS III DE MADRID Tutor: Dr.Eng. Zbigniew Sliwa Cotutor: Ana Muñoz Sanchez Estudiante: Manuel Castrillo Molina 1. Introducción En
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES
 INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE SENSORES Y ACTUADORES PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno integrará sensores y actuadores a sistemas de control
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE SENSORES Y ACTUADORES PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno integrará sensores y actuadores a sistemas de control
Informe técnico 6.2 Simulación de ensamblaje mano
 Informe técnico 6.2 Simulación de ensamblaje mano Fecha: martes, 20 de enero de 2015 Diseñador: Nombre de estudio: Análisis de esfuerzos, desplazamientos y factor de seguridad para prótesis de mano derecha
Informe técnico 6.2 Simulación de ensamblaje mano Fecha: martes, 20 de enero de 2015 Diseñador: Nombre de estudio: Análisis de esfuerzos, desplazamientos y factor de seguridad para prótesis de mano derecha
DISEÑO DE PROTOTIPO DE PRÓTESIS MECATRÓNICA DE MANO. Ponentes: Ana M. Juárez Mendoza Rosa Itzel Flores Luna
 DISEÑO DE PROTOTIPO DE PRÓTESIS MECATRÓNICA DE MANO Ponentes: Ana M. Juárez Mendoza Rosa Itzel Flores Luna INTRODUCCIÓN Y OBJETIVO Actualmente se desarrollan en el mundo prototipos de prótesis de mano
DISEÑO DE PROTOTIPO DE PRÓTESIS MECATRÓNICA DE MANO Ponentes: Ana M. Juárez Mendoza Rosa Itzel Flores Luna INTRODUCCIÓN Y OBJETIVO Actualmente se desarrollan en el mundo prototipos de prótesis de mano
INFLUENCIA DE LOS PARAMETROS DE RELLENO EN EL COMPORTAMIENTO MECANICO A LA FLEXION DE PIEZAS FABRICADAS EN IMPRESORAS 3D DE BAJO COSTE
 INFLUENCIA DE LOS PARAMETROS DE RELLENO EN EL COMPORTAMIENTO MECANICO A LA FLEXION DE PIEZAS FABRICADAS EN IMPRESORAS 3D DE BAJO COSTE MASTER EN DISEÑO Y FABRICACION INTEGRADA ASISTIDA POR COMPUTADOR Presentado
INFLUENCIA DE LOS PARAMETROS DE RELLENO EN EL COMPORTAMIENTO MECANICO A LA FLEXION DE PIEZAS FABRICADAS EN IMPRESORAS 3D DE BAJO COSTE MASTER EN DISEÑO Y FABRICACION INTEGRADA ASISTIDA POR COMPUTADOR Presentado
DISTRIBUCIÓN CHI-CUADRADO O JI-CUADRADO X 2 CONCEPTO BÁSICO Frecuencia: es el número de datos que caen en cada celda. Frecuencias Observadas (fo):
:") DISTRIBUCIÓN CHI-CUADRADO O JI-CUADRADO X CONCEPTO BÁSICO Frecuencia: es el número de datos que caen en cada celda. Frecuencias Observadas (fo): son aquellas que representan los valores muestrales observados
DISTRIBUCIÓN CHI-CUADRADO O JI-CUADRADO X CONCEPTO BÁSICO Frecuencia: es el número de datos que caen en cada celda. Frecuencias Observadas (fo): son aquellas que representan los valores muestrales observados
Antebrazo y mano. Dr. Fernando Zamora J.TP Cat. Anatomía Normal UNT
 Antebrazo y mano Dr. Fernando Zamora J.TP Cat. Anatomía Normal UNT Articulación del Codo Articulación compuesta, formada por 3 articulaciones: Humeroulnar: Troclear. Humerorradial: Condílea. Radioulnar
Antebrazo y mano Dr. Fernando Zamora J.TP Cat. Anatomía Normal UNT Articulación del Codo Articulación compuesta, formada por 3 articulaciones: Humeroulnar: Troclear. Humerorradial: Condílea. Radioulnar
3. Descripción del laboratorio
 3. Descripción del laboratorio 3.1. Dimensiones El Canal de Investigación y Experimentación Marítimas (CIEM) del Laboratorio de Ingenieria Marítima (LIM) de la Universidad Politècnica de Catalunya (UPC),
3. Descripción del laboratorio 3.1. Dimensiones El Canal de Investigación y Experimentación Marítimas (CIEM) del Laboratorio de Ingenieria Marítima (LIM) de la Universidad Politècnica de Catalunya (UPC),
DISEÑO Y CONSTRUCCIÓN DE UNA UNIDAD DE VIGILANCIA Y SEGURIDAD ROBÓTICA PARA ÁREAS RESTRINGIDAS DE LA ESCUELA TÉCNICA DE LA FUERZA AÉREA
 DISEÑO Y CONSTRUCCIÓN DE UNA UNIDAD DE VIGILANCIA Y SEGURIDAD ROBÓTICA PARA ÁREAS RESTRINGIDAS DE LA ESCUELA TÉCNICA DE LA FUERZA AÉREA INGENIERÍA MECATRÓNICA Autores: Diego Jerez Bunces Director: Ing.
DISEÑO Y CONSTRUCCIÓN DE UNA UNIDAD DE VIGILANCIA Y SEGURIDAD ROBÓTICA PARA ÁREAS RESTRINGIDAS DE LA ESCUELA TÉCNICA DE LA FUERZA AÉREA INGENIERÍA MECATRÓNICA Autores: Diego Jerez Bunces Director: Ing.
FUERZA DE LORENTZ / FUERZA SOBRE UN CONDUCTOR (II)
") FUERZA DE LORENTZ / FUERZA SOBRE UN CONDUCTOR (II) 1. OBJETIVO En esta práctica se pretende determinar la fuerza de Lorentz, fuerza que actúa sobre un hilo conductor situado en un campo magnético uniforme
FUERZA DE LORENTZ / FUERZA SOBRE UN CONDUCTOR (II) 1. OBJETIVO En esta práctica se pretende determinar la fuerza de Lorentz, fuerza que actúa sobre un hilo conductor situado en un campo magnético uniforme
Henry Salvador Taco Bonilla Karla Sophia Torres Barriga. DIRECTORA: Ing. Patricia Constante
 DISEÑO E IMPLEMENTACIÓN DE UN EQUIPO DE REHABILITACIÓN PARA EL FORTALECIMIENTO POSTRAUMÁTICO DEL TOBILLO MEDIANTE LA APLICACIÓN DE MOVIMIENTOS DE CIRCUNDUCCIÓN CONTROLADOS POR UN SISTEMA MÓVIL AUTORES:
DISEÑO E IMPLEMENTACIÓN DE UN EQUIPO DE REHABILITACIÓN PARA EL FORTALECIMIENTO POSTRAUMÁTICO DEL TOBILLO MEDIANTE LA APLICACIÓN DE MOVIMIENTOS DE CIRCUNDUCCIÓN CONTROLADOS POR UN SISTEMA MÓVIL AUTORES:
Selección de un Robot Industrial. Prof. J. Milland
 Prof. J. Milland Si debemos robotizar un determinado proceso, debemos seleccionar el robot mas adecuado teniendo en consideración los servicios y el costo. Las características que debemos estar estudiando
Prof. J. Milland Si debemos robotizar un determinado proceso, debemos seleccionar el robot mas adecuado teniendo en consideración los servicios y el costo. Las características que debemos estar estudiando
DISEÑO E IMPLEMENTACIÓN DE UN PROTOTIPO DE TORNO FRESADOR DE CONTROL NUMÉRICO COMPUTARIZADO PARA EL LABORATORIO CNC DE LA ESPE EXTENSIÓN LATACUNGA
 DISEÑO E IMPLEMENTACIÓN DE UN PROTOTIPO DE TORNO FRESADOR DE CONTROL NUMÉRICO COMPUTARIZADO PARA EL LABORATORIO CNC DE LA ESPE EXTENSIÓN LATACUNGA WALTER DAVID NÚÑEZ BALLADARES. ANDRÉS MARCELO GORDÓN GARCÉS.
DISEÑO E IMPLEMENTACIÓN DE UN PROTOTIPO DE TORNO FRESADOR DE CONTROL NUMÉRICO COMPUTARIZADO PARA EL LABORATORIO CNC DE LA ESPE EXTENSIÓN LATACUNGA WALTER DAVID NÚÑEZ BALLADARES. ANDRÉS MARCELO GORDÓN GARCÉS.
IIM Aportación al perfil. Esta asignatura proporciona al alumno las competencias necesarias para:
 1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Carrera: Clave de la asignatura: SATCA 1 Instrumentación Avanzada Ingeniería Electrónica IIM-1305 2-4-6 2.- PRESENTACIÓN Caracterización de la asignatura.
1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Carrera: Clave de la asignatura: SATCA 1 Instrumentación Avanzada Ingeniería Electrónica IIM-1305 2-4-6 2.- PRESENTACIÓN Caracterización de la asignatura.
Estimación de Parámetros.
 Estimación de Parámetros. Un estimador es un valor que puede calcularse a partir de los datos muestrales y que proporciona información sobre el valor del parámetro. Por ejemplo la media muestral es un
Estimación de Parámetros. Un estimador es un valor que puede calcularse a partir de los datos muestrales y que proporciona información sobre el valor del parámetro. Por ejemplo la media muestral es un
ACOSTA CARRASCO EDWIN JAVIER GARCÉS CADENA ANDRÉS ALEJANDRO
 DISEÑO Y CONSTRUCCIÓN DE UN EQUIPO AUTOMÁTICO DE PRUEBAS PARA LA VERIFICACIÓN DE CONTINUIDAD Y RIGIDEZ DIELÉCTRICA DEL ALAMBRE ESMALTADO DE COBRE PARA EL LABORATORIO DE CONTROL DE CALIDAD DE LA EMPRESA
DISEÑO Y CONSTRUCCIÓN DE UN EQUIPO AUTOMÁTICO DE PRUEBAS PARA LA VERIFICACIÓN DE CONTINUIDAD Y RIGIDEZ DIELÉCTRICA DEL ALAMBRE ESMALTADO DE COBRE PARA EL LABORATORIO DE CONTROL DE CALIDAD DE LA EMPRESA
PVF12-1** Caída de una esfera de acero en glicerina
 PVF1-1** Caída de una esfera de acero en glicerina Esta fotografía corresponde a una bola de acero cayendo en glicerina. La bola aparece en la fotografía como una mancha brillante. Entre dos posiciones
PVF1-1** Caída de una esfera de acero en glicerina Esta fotografía corresponde a una bola de acero cayendo en glicerina. La bola aparece en la fotografía como una mancha brillante. Entre dos posiciones
Paola Maribel Llamuca Torres Raquel Estefania Fernández Martínez
 DISEÑO Y CONSTRUCCIÓN DE MATERIAL TIFLOTÉCNICO QUE FACILITE LA IMPRESIÓN DE INFORMACIÓN EN SISTEMA BRAILLE A NIÑOS DE LA UNIDAD EDUCATIVA ESPECIALIZADA DE NO VIDENTES DE COTOPAXI Paola Maribel Llamuca
DISEÑO Y CONSTRUCCIÓN DE MATERIAL TIFLOTÉCNICO QUE FACILITE LA IMPRESIÓN DE INFORMACIÓN EN SISTEMA BRAILLE A NIÑOS DE LA UNIDAD EDUCATIVA ESPECIALIZADA DE NO VIDENTES DE COTOPAXI Paola Maribel Llamuca
Universidad Católica de Cuenca Unidad Académica de Ingeniería de Sistemas, Eléctrica y Electrónica
 Universidad Católica de Cuenca Unidad Académica de Ingeniería de Sistemas, Eléctrica y Electrónica Objetivo específico 1.4. Seleccionar los elementos mecánicos y/o electrónicos requeridos para a prótesis.
Universidad Católica de Cuenca Unidad Académica de Ingeniería de Sistemas, Eléctrica y Electrónica Objetivo específico 1.4. Seleccionar los elementos mecánicos y/o electrónicos requeridos para a prótesis.
Mano. Justo E. Pinzón E. IX Semestre
 Mano Justo E. Pinzón E. IX Semestre Generalidades Porción distal del MS Herramienta mecánica y sensitiva Movimientos con ref. en 3 dedo Posiciones Reposo Anatómica Huesos: Metacarpo 5 huesos metacarpianos
Mano Justo E. Pinzón E. IX Semestre Generalidades Porción distal del MS Herramienta mecánica y sensitiva Movimientos con ref. en 3 dedo Posiciones Reposo Anatómica Huesos: Metacarpo 5 huesos metacarpianos
Características físicas del sonido
 Características físicas del sonido Sonido? Propagación de cambios en la densidad de partículas en un medio elástico producto de una perturbación mecánica Transferencia de energía al desplazarse una perturbación
Características físicas del sonido Sonido? Propagación de cambios en la densidad de partículas en un medio elástico producto de una perturbación mecánica Transferencia de energía al desplazarse una perturbación
Monitoreo y control de la posición angular de una cámara.
 Monitoreo y control de la posición angular de una cámara. Héctor Bonilla Barranco, Aarón E. López Luna, Daniel Ortiz Hernández, Ángel Bulmaro Sánchez Rubio Benemérita universidad autónoma de Puebla 4 Sur
Monitoreo y control de la posición angular de una cámara. Héctor Bonilla Barranco, Aarón E. López Luna, Daniel Ortiz Hernández, Ángel Bulmaro Sánchez Rubio Benemérita universidad autónoma de Puebla 4 Sur
ESPECIFICACIONES MATERIALES UTILIZADOS
 Contenido Capítulo 1 INTRODUCCIÓN... 17 1.1 Introducción general... 17 1.2 Hipótesis de trabajo... 18 1.3 Objetivos... 18 1.3.1 Objetivo general... 18 1.3.2 Objetivos específicos... 18 1.4 Área de estudio
Contenido Capítulo 1 INTRODUCCIÓN... 17 1.1 Introducción general... 17 1.2 Hipótesis de trabajo... 18 1.3 Objetivos... 18 1.3.1 Objetivo general... 18 1.3.2 Objetivos específicos... 18 1.4 Área de estudio
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES
 INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE CINEMÁTICA DE MECANISMOS PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno calculará los parámetros relacionados con el
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE CINEMÁTICA DE MECANISMOS PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno calculará los parámetros relacionados con el
TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN
 TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN HOJA DE ASIGNATURA CON DESGLOSE DE UNIDADES TEMÁTICAS 1. Nombre de la asignatura Microcontroladores para instrumentación y control. 2.
TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN HOJA DE ASIGNATURA CON DESGLOSE DE UNIDADES TEMÁTICAS 1. Nombre de la asignatura Microcontroladores para instrumentación y control. 2.
Actuadores eléctricos - Motores
 Servomotores Un servomotor es básicamente un actuador mecánico que contine un motor eléctrico y un conjunto de engranajes que permiten multiplicar el torque del sistema final y tiene la capacidad de ser
Servomotores Un servomotor es básicamente un actuador mecánico que contine un motor eléctrico y un conjunto de engranajes que permiten multiplicar el torque del sistema final y tiene la capacidad de ser
Serie de Fundamentos de Mediciones con Sensores. ni.com
 Serie de Fundamentos de Mediciones con Sensores Fundamentos de Adquisición de Datos Anjelica Warren Gerente de productos National Instruments Qué es la adquisición de datos (DAQ)? 3 Por qué realizar mediciones?
Serie de Fundamentos de Mediciones con Sensores Fundamentos de Adquisición de Datos Anjelica Warren Gerente de productos National Instruments Qué es la adquisición de datos (DAQ)? 3 Por qué realizar mediciones?
TEMA: AUTOR: NÉSTOR DAMIÁN LASLUISA GARCÉS DIRECTOR: ING. MAURICIO CRUZ CO DIRECTOR: ING. MARCO SINGAÑA. Latacunga, 26 de febrero de 2015
 TEMA: DISEÑO Y CONSTRUCCIÓN DE UNA SILLA DE RUEDAS AUTÓNOMA, ACCIONADA MEDIANTE ONDAS CEREBRALES, PARA LA ASOCIACIÓN DE LIMITADOS PLÉJICOS DE TUNGURAHUA (ASOPLEJICAT) AUTOR: NÉSTOR DAMIÁN LASLUISA GARCÉS
TEMA: DISEÑO Y CONSTRUCCIÓN DE UNA SILLA DE RUEDAS AUTÓNOMA, ACCIONADA MEDIANTE ONDAS CEREBRALES, PARA LA ASOCIACIÓN DE LIMITADOS PLÉJICOS DE TUNGURAHUA (ASOPLEJICAT) AUTOR: NÉSTOR DAMIÁN LASLUISA GARCÉS
Características físicas del sonido
 Características físicas del sonido Sonido? Propagación de cambios en la densidad de partículas en un medio elástico producto de una perturbación mecánica Transferencia de energía al desplazarse una perturbación
Características físicas del sonido Sonido? Propagación de cambios en la densidad de partículas en un medio elástico producto de una perturbación mecánica Transferencia de energía al desplazarse una perturbación
LABORATORIO DE DISPOSITIVOS ELECTRÓNICOS PRÁCTICA N 1 CONOCIMIENTOS DEL EQUIPO Y EL PAQUETE DE SIMULACIÓN
 LABORATORIO DE DISPOSITIVOS ELECTRÓNICOS 1. TEMA PRÁCTICA N 1 2. OBJETIVOS CONOCIMIENTOS DEL EQUIPO Y EL PAQUETE DE SIMULACIÓN 2.1. Desarrollar en el estudiante suficiente habilidad para que utilice adecuadamente
LABORATORIO DE DISPOSITIVOS ELECTRÓNICOS 1. TEMA PRÁCTICA N 1 2. OBJETIVOS CONOCIMIENTOS DEL EQUIPO Y EL PAQUETE DE SIMULACIÓN 2.1. Desarrollar en el estudiante suficiente habilidad para que utilice adecuadamente
DEPARTAMENTO DE ENERGÍA Y MECÁNICA
 DEPARTAMENTO DE ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA AUTOMOTRIZ DISEÑO, CONSTRUCCIÓN E IMPLEMENTACIÓN DE UN ASIENTO DE POTENCIA CON 3 GRADOS DE LIBERTAD PARA LA ASOCIACIÓN DE DISCAPACITADOS MERCEDES
DEPARTAMENTO DE ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA AUTOMOTRIZ DISEÑO, CONSTRUCCIÓN E IMPLEMENTACIÓN DE UN ASIENTO DE POTENCIA CON 3 GRADOS DE LIBERTAD PARA LA ASOCIACIÓN DE DISCAPACITADOS MERCEDES
The AASM Manual for the Scoring of Sleep and Associated Events V2.0.2
 The AASM Manual for the Scoring of Sleep and Associated Events V2.0.2 El sueño es Un estado fisiológico, activo, recurrente y reversible en el que baja el nivel de vigilancia estando disminuida la percepción
The AASM Manual for the Scoring of Sleep and Associated Events V2.0.2 El sueño es Un estado fisiológico, activo, recurrente y reversible en el que baja el nivel de vigilancia estando disminuida la percepción
El Espectro Electromagnético
 El Espectro Electromagnético ONDAS ELECTROMAGNETICAS Se componen de un campo eléctrico y un campo magnético, ambos variando en el tiempo Su energía aumenta con la frecuencia Se distinguen ondas ionizantes
El Espectro Electromagnético ONDAS ELECTROMAGNETICAS Se componen de un campo eléctrico y un campo magnético, ambos variando en el tiempo Su energía aumenta con la frecuencia Se distinguen ondas ionizantes
Electroacústica básica: Altavoces, Parlantes y Cajas acústicas I
 Electroacústica básica: Altavoces, Parlantes y Cajas acústicas I Es el turno ahora de mencionar ciertos conceptos básicos sobre parlantes. Es un tema muy largo, tedioso y requiere del conocimiento de Métodos
Electroacústica básica: Altavoces, Parlantes y Cajas acústicas I Es el turno ahora de mencionar ciertos conceptos básicos sobre parlantes. Es un tema muy largo, tedioso y requiere del conocimiento de Métodos
TEMA: MOVIMIENTO ARMÓNICO SIMPLE
 TEMA: MOVIMIENTO ARMÓNICO SIMPLE C-J-04 a) Al colgar una masa en el extremo de un muelle en posición vertical, éste se desplaza 5 cm; de qué magnitudes del sistema depende la relación entre dicho desplazamiento
TEMA: MOVIMIENTO ARMÓNICO SIMPLE C-J-04 a) Al colgar una masa en el extremo de un muelle en posición vertical, éste se desplaza 5 cm; de qué magnitudes del sistema depende la relación entre dicho desplazamiento
ULA. Escuela de Ingeniería Mecánica 25 de febrero de 2013 Instrumentación Sección 01.
 Teoría Solución Conteste las siguientes preguntas (2/3 de puntos cada una): 1. Mencione tres ventajas de un proceso bien instrumentado: 1. Ahorro de material y tiempo, 2. computo de costos, 3. seguridad
Teoría Solución Conteste las siguientes preguntas (2/3 de puntos cada una): 1. Mencione tres ventajas de un proceso bien instrumentado: 1. Ahorro de material y tiempo, 2. computo de costos, 3. seguridad
11 de septiembre de 2017
 I. Mecanismos Universidad Politécnica de Guanajuato 11 de septiembre de 2017 Se puede definir el estudio de los mecanismos como la parte del diseño de máquinas que se interesa del diseño cinemático de
I. Mecanismos Universidad Politécnica de Guanajuato 11 de septiembre de 2017 Se puede definir el estudio de los mecanismos como la parte del diseño de máquinas que se interesa del diseño cinemático de
VIBRACIÓN DE CUERDAS
 VIBRACIÓN DE CUERDAS 1. OBJETIVO Estudiar cómo varía la frecuencia fundamental de vibración de un hilo metálico, sujeto por ambos extremos, en función de su longitud, de su diámetro y de una fuerza tensora..-
VIBRACIÓN DE CUERDAS 1. OBJETIVO Estudiar cómo varía la frecuencia fundamental de vibración de un hilo metálico, sujeto por ambos extremos, en función de su longitud, de su diámetro y de una fuerza tensora..-
LABORATORIO DE DISPOSITIVOS ELECTRÓNICOS. PRÁCTICA No. 1. Fecha:
 LABORATORIO DE DISPOSITIVOS ELECTRÓNICOS PRÁCTICA No. 1 Fecha: Tema: Familiarización con el equipo de laboratorio Escuela Politécnica nacional Objetivo: Desarrollar en el estudiante suficiente habilidad
LABORATORIO DE DISPOSITIVOS ELECTRÓNICOS PRÁCTICA No. 1 Fecha: Tema: Familiarización con el equipo de laboratorio Escuela Politécnica nacional Objetivo: Desarrollar en el estudiante suficiente habilidad
Peso = m.g, Fuerza recuperadora = k x. m g = k x x /g = m / k = 0'05 / 9'81 = 0'005 s 2
 PAU MADRID JUNIO 2004 Cuestión 1.- a) Al colgar una masa en el extremo de un muelle en posición vertical, éste se desplaza 5 cm; de qué magnitudes del sistema depende la relación entre dicho desplazamiento
PAU MADRID JUNIO 2004 Cuestión 1.- a) Al colgar una masa en el extremo de un muelle en posición vertical, éste se desplaza 5 cm; de qué magnitudes del sistema depende la relación entre dicho desplazamiento
DISEÑO DE UN TRADUCTOR DE GESTOS BASADO EN UN GUANTE ELECTRÓNICO SENSITIVO AL MOVIMIENTO
 DISEÑO DE UN TRADUCTOR DE GESTOS BASADO EN UN GUANTE ELECTRÓNICO SENSITIVO AL MOVIMIENTO David Caicedo Fernández 1, Enrique Solórzano García 2, Germán Vargas López 3 1 Ingeniero en Electrónica y Telecomunicaciones
DISEÑO DE UN TRADUCTOR DE GESTOS BASADO EN UN GUANTE ELECTRÓNICO SENSITIVO AL MOVIMIENTO David Caicedo Fernández 1, Enrique Solórzano García 2, Germán Vargas López 3 1 Ingeniero en Electrónica y Telecomunicaciones
ONDAS MECANICAS-SONIDO
 ONDAS MECANICAS-SONIDO Ejemplos de resolución de ejercicios con explicaciones teóricas Ejercicio 1 Un tren bala se desplaza con una velocidad v en las proximidades de una estación. En ese momento el maquinista
ONDAS MECANICAS-SONIDO Ejemplos de resolución de ejercicios con explicaciones teóricas Ejercicio 1 Un tren bala se desplaza con una velocidad v en las proximidades de una estación. En ese momento el maquinista
y emociones. En un principio, se comunicó a través de la voz, ademanes y símbolos
 2 MODULACIÓN EN AMPLITUD 2.1 Antecedentes Desde su origen, el hombre ha tenido la necesidad de comunicarse para transmitir sus ideas y emociones. En un principio, se comunicó a través de la voz, ademanes
2 MODULACIÓN EN AMPLITUD 2.1 Antecedentes Desde su origen, el hombre ha tenido la necesidad de comunicarse para transmitir sus ideas y emociones. En un principio, se comunicó a través de la voz, ademanes
Jeferson Corredor Salcedo. Director: Ing. Jorge Andrés García Barbosa Codirector: Ing. Ubaldo García Zaragoza
 IMPLEMENTACIÓN DE NUEVAS TECNOLOGIAS DE TOLERANCIAS GEOMÉTRICAS Y DIMENSIONALES PARA GARANTIZAR LOS REQUERIMIENTOS DE PRECISIÓN EN EL MOMENTO DE EMSAMBLE DE LOS COMPONENTES DEL ROBOT DELTA FIM-USTA. Jeferson
IMPLEMENTACIÓN DE NUEVAS TECNOLOGIAS DE TOLERANCIAS GEOMÉTRICAS Y DIMENSIONALES PARA GARANTIZAR LOS REQUERIMIENTOS DE PRECISIÓN EN EL MOMENTO DE EMSAMBLE DE LOS COMPONENTES DEL ROBOT DELTA FIM-USTA. Jeferson
INGENIERÍA AUTOMOTRIZ DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE DIRECCIÓN PARA UN VEHÍCULO TRIMOTO
 INGENIERÍA AUTOMOTRIZ DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE DIRECCIÓN PARA UN VEHÍCULO TRIMOTO AUTOR: CARLOS SUNTAXI DIRECTOR: ING. GUIDO TORRES CODIRECTOR: ING. FÉLIX MANJARRÉS. SISTEMA DE DIRECCIÓN
INGENIERÍA AUTOMOTRIZ DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE DIRECCIÓN PARA UN VEHÍCULO TRIMOTO AUTOR: CARLOS SUNTAXI DIRECTOR: ING. GUIDO TORRES CODIRECTOR: ING. FÉLIX MANJARRÉS. SISTEMA DE DIRECCIÓN
INDICE 1. Mecatrónica 2. Sensores y Transductores 3. Acondicionamientos de señales 4. Sistema de Presentación de Datos
 INDICE Prefacio Xi 1. Mecatrónica 1.1. Que es la mecatrónica? 1 1.2. Sistemas 2 1.3. Sistemas de medición 2 1.4. Sistemas de control 3 1.5. Controladores basados en un microprocesador 11 1.6. Enfoque de
INDICE Prefacio Xi 1. Mecatrónica 1.1. Que es la mecatrónica? 1 1.2. Sistemas 2 1.3. Sistemas de medición 2 1.4. Sistemas de control 3 1.5. Controladores basados en un microprocesador 11 1.6. Enfoque de
TRABAJO DE TITULACIÓN, PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN ELECTRÓNICA E INSTRUMENTACIÓN
 TRABAJO DE TITULACIÓN, PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN ELECTRÓNICA E INSTRUMENTACIÓN IMPLEMENTACIÓN DE UN SISTEMA TECNOLÓGICO MEDIANTE REALIDAD VIRTUAL, PARA LA REHABILITACIÓN DE PACIENTES
TRABAJO DE TITULACIÓN, PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN ELECTRÓNICA E INSTRUMENTACIÓN IMPLEMENTACIÓN DE UN SISTEMA TECNOLÓGICO MEDIANTE REALIDAD VIRTUAL, PARA LA REHABILITACIÓN DE PACIENTES
SERIE MES. Máquinas para ensayos de compresión hasta 800 t
 Máquinas para ensayos de compresión hasta 800 t Ensayos de probetas de hormigón, rocas, cementos y materiales de construcción entre 150 y 800 t Serie MES. descripción Para ensayos de probetas de hormigón,
Máquinas para ensayos de compresión hasta 800 t Ensayos de probetas de hormigón, rocas, cementos y materiales de construcción entre 150 y 800 t Serie MES. descripción Para ensayos de probetas de hormigón,
EVALUACIÓN. Nombre del alumno (a): Escuela: Grupo:
: Escuela: Grupo:") EVALUACIÓN PREGUNTAS Por: Yuri Posadas Velázquez Contesta lo siguiente y haz lo que se pide. 1. Qué es una onda? 2. De acuerdo con su geometría cómo se clasifican las ondas? Define y da un ejemplo de cada
EVALUACIÓN PREGUNTAS Por: Yuri Posadas Velázquez Contesta lo siguiente y haz lo que se pide. 1. Qué es una onda? 2. De acuerdo con su geometría cómo se clasifican las ondas? Define y da un ejemplo de cada
Guía de Práctica Experiencia 1 Robot KUKA 24 Marzo 2009
 Guía de Práctica Experiencia 1 Robot KUKA 24 Marzo 2009 Profesor: Rodolfo Garcia R. Profesor auxiliar: Paul Pacheco 1. Introducción Comparado con otros inventos técnicos, el robot es relativamente joven.
Guía de Práctica Experiencia 1 Robot KUKA 24 Marzo 2009 Profesor: Rodolfo Garcia R. Profesor auxiliar: Paul Pacheco 1. Introducción Comparado con otros inventos técnicos, el robot es relativamente joven.
FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control LABORATORIO DE INSTRUMENTACIÓN INDUSTRIAL PRÁCTICA N 3
 FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control LABORATORIO DE INSTRUMENTACIÓN INDUSTRIAL 1. TEMA PRÁCTICA N 3 2. OBJETIVOS CONTROL DE MOTORES DC Y MOTORES A
FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control LABORATORIO DE INSTRUMENTACIÓN INDUSTRIAL 1. TEMA PRÁCTICA N 3 2. OBJETIVOS CONTROL DE MOTORES DC Y MOTORES A
Robot de dibujo XY Plotter
 Robot de dibujo XY Plotter A través de esta guía, aprenderemos a hacer la máquina de dibujo XY Plotter. Con un robot de dibujo se puede dibujar imágenes en papel, en la pared, panel o A4. Puede imprimir
Robot de dibujo XY Plotter A través de esta guía, aprenderemos a hacer la máquina de dibujo XY Plotter. Con un robot de dibujo se puede dibujar imágenes en papel, en la pared, panel o A4. Puede imprimir
Física A.B.A.U. ONDAS 1 ONDAS
 Física A.B.A.U. ONDAS 1 ONDAS PROBLEMAS 1. La ecuación de una onda transversal que se propaga en una cuerda es y(x, t) = 10 sen π(x 0,2 t), donde las longitudes se expresan en metros y el tiempo en segundos.
Física A.B.A.U. ONDAS 1 ONDAS PROBLEMAS 1. La ecuación de una onda transversal que se propaga en una cuerda es y(x, t) = 10 sen π(x 0,2 t), donde las longitudes se expresan en metros y el tiempo en segundos.
Álvaro Andrés Velásquez T. Depto. de Ciencias Básicas Septiembre de 2009
 Álvaro Andrés Velásquez T. Depto. de Ciencias Básicas Septiembre de 2009 Estructura de un curso teórico práctico básico de ciencias Estructura de un curso teórico práctico con proyecto de materia Importancia
Álvaro Andrés Velásquez T. Depto. de Ciencias Básicas Septiembre de 2009 Estructura de un curso teórico práctico básico de ciencias Estructura de un curso teórico práctico con proyecto de materia Importancia
Revisión y Registro de Equipos de Laboratorios (Inventario) Ingeniería Civil Eléctrica y Biomédica
 Ingeniería Civil Eléctrica y Biomédica") Revisión y Registro de Equipos de Laboratorios (Inventario) Ingeniería Civil Eléctrica y Biomédica Luis Alarcón Diego Quiroz Gabriel Benítez G. Esteban Suazo A. FACULTAD DE INGENIERÍA UDEC Agosto de 2017
Revisión y Registro de Equipos de Laboratorios (Inventario) Ingeniería Civil Eléctrica y Biomédica Luis Alarcón Diego Quiroz Gabriel Benítez G. Esteban Suazo A. FACULTAD DE INGENIERÍA UDEC Agosto de 2017
Capítulo 1 Introducción Mecatrónica Sistemas de medición Ejemplos de diseño... 5
 ÍNDICE Listas... ix Figuras... ix Tablas... xv Temas para discusión en clase... xvi Ejemplos... xviii Ejemplos de diseño... xix Ejemplos de diseño encadenado... xx Prefacio... xxi Capítulo 1 Introducción...
ÍNDICE Listas... ix Figuras... ix Tablas... xv Temas para discusión en clase... xvi Ejemplos... xviii Ejemplos de diseño... xix Ejemplos de diseño encadenado... xx Prefacio... xxi Capítulo 1 Introducción...
ENTRENAMIENTO BASICO BINAURAL
 ENTRENAMIENTO BASICO BINAURAL Como Acabar Con El Estrés Transforma el ESTRÉS en un ESTADO de ALERTA www.entrenamientobinaural.com índice Este texto consta de dos capítulos, En el capítulo 1 se habla del
ENTRENAMIENTO BASICO BINAURAL Como Acabar Con El Estrés Transforma el ESTRÉS en un ESTADO de ALERTA www.entrenamientobinaural.com índice Este texto consta de dos capítulos, En el capítulo 1 se habla del
Diseño e implementación de una plataforma robótica móvil inalámbrica con tracción intercambiable para el laboratorio de Mecatrónica de la ESPE-L
 Diseño e implementación de una plataforma robótica móvil inalámbrica con tracción intercambiable para el laboratorio de Mecatrónica de la ESPE-L Por Paúl Tinizaray Características del terreno Conocer las
Diseño e implementación de una plataforma robótica móvil inalámbrica con tracción intercambiable para el laboratorio de Mecatrónica de la ESPE-L Por Paúl Tinizaray Características del terreno Conocer las
Movimiento ondulatorio
 Una onda consiste en el movimiento de la propagación de una perturbación sin que exista transporte neto de materia. En una onda se propaga energía pero no materia. Pero aunque no sea materia sí puede interaccionar
Una onda consiste en el movimiento de la propagación de una perturbación sin que exista transporte neto de materia. En una onda se propaga energía pero no materia. Pero aunque no sea materia sí puede interaccionar
CONTROL DE TALUDES UTILIZANDO RADAR BUENAVISTA DEL COBRE XXVIII CONVENCION BIENAL DE SEGURIDAD Y SALUD OCUPACIPONAL DURANGO, DURANGO. NOV.
 CONTROL DE TALUDES UTILIZANDO RADAR BUENAVISTA DEL COBRE XXVIII CONVENCION BIENAL DE SEGURIDAD Y SALUD OCUPACIPONAL DURANGO, DURANGO. NOV. 2018 Que medir? Taludes, rampas, áreas de explotación, voladuras,
CONTROL DE TALUDES UTILIZANDO RADAR BUENAVISTA DEL COBRE XXVIII CONVENCION BIENAL DE SEGURIDAD Y SALUD OCUPACIPONAL DURANGO, DURANGO. NOV. 2018 Que medir? Taludes, rampas, áreas de explotación, voladuras,
Ondas. Fisica II para Ing. en Prevención de Riesgos Sem. I 2011 JMTB
 Unidad II - Ondas Te has preguntado cómo escuchamos? Cómo llega la señal de televisión o de radio a nuestra casa? Cómo es posible que nos comuniquemos por celular? Cómo las ballenas se comunican entre
Unidad II - Ondas Te has preguntado cómo escuchamos? Cómo llega la señal de televisión o de radio a nuestra casa? Cómo es posible que nos comuniquemos por celular? Cómo las ballenas se comunican entre
TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN EN COMPETENCIAS PROFESIONALES ASIGNATURA DE MICROCONTROLADORES
 TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN EN COMPETENCIAS PROFESIONALES ASIGNATURA DE MICROCONTROLADORES 1. Competencias Implementar sistemas de medición y control bajo los estándares
TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN EN COMPETENCIAS PROFESIONALES ASIGNATURA DE MICROCONTROLADORES 1. Competencias Implementar sistemas de medición y control bajo los estándares
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES
 INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE CONTROLADORES LOGICOS PROGRAMABLES PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno desarrollará soluciones de control
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE CONTROLADORES LOGICOS PROGRAMABLES PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno desarrollará soluciones de control
SIMULACIÓN DE UN SISMO MEDIANTE EL MOVIMIENTO DE UN PÉNDULO DOBLE
 INSTITUTO TECNOLÓGICO DE MATAMOROS SIMULACIÓN DE UN SISMO MEDIANTE EL MOVIMIENTO DE UN PÉNDULO DOBLE PROYECTO SEMESTRAL MATERIA HORARIO ASESOR EQUIPO 2 Análisis de vibraciones Lunes a Viernes, 17:00-18:00hrs.
INSTITUTO TECNOLÓGICO DE MATAMOROS SIMULACIÓN DE UN SISMO MEDIANTE EL MOVIMIENTO DE UN PÉNDULO DOBLE PROYECTO SEMESTRAL MATERIA HORARIO ASESOR EQUIPO 2 Análisis de vibraciones Lunes a Viernes, 17:00-18:00hrs.
Mena Guevara José Gabriel Latacunga, 2014
 DISEÑO Y CONSTRUCCIÓN DE LA ESTRUCTURA DE UN BRAZO ROBÓTICO CON SEIS GRADOS DE LIBERTAD, APLICANDO INGENIERÍA INVERSA PARA LA UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE EXTENSIÓN LATACUNGA. Mena Guevara José
DISEÑO Y CONSTRUCCIÓN DE LA ESTRUCTURA DE UN BRAZO ROBÓTICO CON SEIS GRADOS DE LIBERTAD, APLICANDO INGENIERÍA INVERSA PARA LA UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE EXTENSIÓN LATACUNGA. Mena Guevara José
Capítulo I Fundamentos teóricos
 TEMA: DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE ROBOT BÍPEDO AUTÓNOMO CON DESPLAZAMIENTO DINÁMICO PARA EL LABORATORIO DE ROBÓTICA INDUSTRIAL DE LA ESPE EXTENSIÓN LATACUNGA. AUTORES: Morillo Poveda Eduardo
TEMA: DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE ROBOT BÍPEDO AUTÓNOMO CON DESPLAZAMIENTO DINÁMICO PARA EL LABORATORIO DE ROBÓTICA INDUSTRIAL DE LA ESPE EXTENSIÓN LATACUNGA. AUTORES: Morillo Poveda Eduardo
Obtención del rango de movilidad de los dedos índice, medio, anular y meñique
 Tema A1a. Diseño Mecánico. Experimentación analítica del espacio de trabajo de un mecanismo en lazo abierto. Obtención del rango de movilidad de los dedos índice, medio, anular y meñique Barrera Garcia
Tema A1a. Diseño Mecánico. Experimentación analítica del espacio de trabajo de un mecanismo en lazo abierto. Obtención del rango de movilidad de los dedos índice, medio, anular y meñique Barrera Garcia
Ondas sonoras. FIS Griselda Garcia - 1er. Semestre / 23
 Ondas sonoras Las ondas sonoras son ondas mecánicas longitudinales las partículas se mueven a lo largo de la línea de propagación. La propagación de una onda sonora provoca desviaciones de la densidad
Ondas sonoras Las ondas sonoras son ondas mecánicas longitudinales las partículas se mueven a lo largo de la línea de propagación. La propagación de una onda sonora provoca desviaciones de la densidad
Unidad 1- Oscilaciones
 Unidad 1- Oscilaciones 1.1 Movimiento Armónico Simple M. En C. José Antonio González Moreno Octubre del 2017 Temario Propuesto: 1. Movimiento Armónico Simple. 2. Física de las Vibraciones. 3. Unidades
Unidad 1- Oscilaciones 1.1 Movimiento Armónico Simple M. En C. José Antonio González Moreno Octubre del 2017 Temario Propuesto: 1. Movimiento Armónico Simple. 2. Física de las Vibraciones. 3. Unidades
Departamento de Ingeniería Mecánica Ingeniaritza Mekanikoa Saila. 1. Espesor de viruta antes y después del corte 2. Corte ortogonal y oblicuo
 MECÁNICA DEL CORTE Fundamentos de la mecánica del corte 1. Espesor de viruta antes y después del corte 2. Corte ortogonal y oblicuo 3. Fuerza generada durante el corte 4. Tipos básicos de viruta y zonas
MECÁNICA DEL CORTE Fundamentos de la mecánica del corte 1. Espesor de viruta antes y después del corte 2. Corte ortogonal y oblicuo 3. Fuerza generada durante el corte 4. Tipos básicos de viruta y zonas
CARRERA DE INGENIERÍA EN MECATRÓNICA
 CARRERA DE INGENIERÍA EN MECATRÓNICA TEMA: DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA MECÁNICO PARA UN ROBOT MANIPULADOR MÓVIL EN EL PROYECTO DE INVESTIGACIÓN TELE OPERACIÓN BILATERAL CORPORATIVO DE MÚLTIPLES
CARRERA DE INGENIERÍA EN MECATRÓNICA TEMA: DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA MECÁNICO PARA UN ROBOT MANIPULADOR MÓVIL EN EL PROYECTO DE INVESTIGACIÓN TELE OPERACIÓN BILATERAL CORPORATIVO DE MÚLTIPLES