PROYECTO FINAL DE ELECTRONICA DIGITAL
|
|
|
- María Mercedes Medina Gil
- hace 8 años
- Vistas:
Transcripción


1 PROYECTO FINAL DE ELECTRONICA DIGITAL 1.- TEMA: 2.- OBJETIVOS AÑO VIEJO SEXY IRON BABY Buscar y reunir ideas para realizar el año viejo. Recolectar y conseguir los materiales para empezar a realizar la maqueta. Diseñar la maqueta para luego decidir los movimientos y secuencias que va a realizar la maqueta. Diseñar los circuitos para los movimientos del tórax, cuello, mascara y armas. Diseñar los circuitos para las secuencias de los ojos, pecho, y armas. Armar y probar los circuitos diseñados para cada funcionamiento propuesto. Ensamblar y adaptar los circuitos en la maqueta luego de haber terminado de probarlos. 3.- MARCO TEÓRICO TEMPORIZADOR 555 El LM555N provee una señal de reloj de forma de onda cuadrada, cuya frecuencia se puede cambiar entre algunas décimas de ciclos por segundo hasta varios ciclos por segundo. El temporizador 555 se puede conectar para que funcione de diferentes maneras, pero la q nosotros utilizamos es como multivibrador astable y. Puede también configurarse para generar formas de onda tipo Rampa. MULTIVIBRADOR ASTABLE Este tipo de funcionamiento se caracteriza por una salida con forma de onda cuadrada (o rectangular) continua de ancho predefinido por el diseñador del circuito. La señal de salida tiene un nivel alto por un tiempo 1 y un nivel bajo por un tiempo 2. La duración de estos tiempos depende de los valores de los resistores y capacitores. Compuerta NAND


2 Las compuertas NAND 74LS00N se utilizan para configurar el contador e indicar que reinicie cuando se termine el conteo. Contador ascendente descendente El contador ascendente-descendente con modo de control, es un circuito síncrono reversible. El funcionamiento sincrónico es proporcionado por tener todos los flip-flops registró conectados simultáneamente, de modo que las salidas cambian. FUNCIONAMIENTO El circuito de las luces secuenciales es bastante sencillo de entender, solo basta con analizar cada una de sus partes para comprender el funcionamiento en conjunto de este sistema. Para la alimentación de este circuito se emplea una fuente de voltaje de 5 voltios y otra de 12 voltios, en el mismo puente conectamos a la salida dos capacitores para disminuir el voltaje de rizo o como se dice eliminar el ruido que genera la fuente Posteriormente se emplea un temporizador 555, este dispositivo nos brinda señales de pulso de reloj a cierta frecuencia la cual depende de los valores de los resistores y capacitores que están conectados según la configuración, en este caso es astable, pero también podemos variar la frecuencia de los pulsos gracias al cambio de la resistencia que tiene el potenciómetro.


3 CIRCUITOS FLIP FLOP Flip Flop tipo "J-K" Este FF es uno de los más usados en los circuitos digitales, y de hecho es parte fundamental de muchos circuitos avanzados como contadores y registros de corrimiento, que ya vienen integrados en un chip. Tabla de verdad de un FF tipo J-K síncrono. Flip Flop tipo "D" (Datos, Data) A diferencia de los FF tipo J-K, el FF tipo "D" (Datos, Data) sólo cuenta con una entrada para hacer el cambio de las salidas. A cada pulso del reloj (dependiendo si el FF utiliza una TPP o una TPN) el estado presente en la entrada "D" será transferido a la salida Q y /Q. Tabla de verdad de un FF tipo "D" Entradas asíncronas en los FF. La respuesta está en los FF síncronos de cualquier tipo que poseen entradas asíncronas, esto añade dos pines más de control a nuestros FF, los conocidos SET y RESET (Los cuáles pueden ser activos en el estado ALTO o BAJO). Entonces tenemos FF síncronos (Tipo "J - K", o tipo "D ) con un par de entradas que no dependen en ningún momento del pulso de Reloj. Haciendo una combinación perfecta de entradas que controlan las salidas de manera automática (Asíncronas) o controladas por un pulso de reloj (Síncronas).
 el estado presente en la entrada \"D\" será transferido a la salida Q y /Q.")

4 La siguiente figura nos muestra los símbolos de los FF Tipo "J - K" y "D" con sus entradas asíncronas. FUNCIONAMIENTO Todos los circuitos digitales utilizan datos binarios para funcionar correctamente, los circuitos están diseñados para contar, sumar, separar, etc. los datos según nuestras necesidades, pero por el tipo de funcionamiento de las compuertas digitales, los datos presentes en las salidas de las mismas, cambian de acuerdo con sus entradas, y no hay manera debitarlo, si las entradas cambian, las salidas lo harán también, entonces Cómo podemos hacer para mantener un dato o serie de datos en un lugar hasta que los necesitemos? La respuesta son las memorias, básicamente son sistemas que pueden almacenar uno o más datos evitando que se pierdan, hasta que nosotros lo consideremos necesario, es decir, pueden variar su contenido a nuestra voluntad. El contador digital En electrónica es bastante frecuente verse necesitado de contabilizar eventos y por tanto se requiere utilizar un contador, en nuestro caso se tratará de un contador electrónico digital. Un contador electrónico básicamente consta de una entrada de impulsos que se encarga de conformar (escuadrar), de manera que el conteo de los mismos no sea alterado por señales no deseadas, las cuales pueden falsear el resultado final. Estos impulsos son acumulados en un contador propiamente dicho cuyo resultado, se presenta mediante un visor que puede estar constituido por una serie de sencillos dígitos de siete segmentos o en su caso mediante una sofisticada pantalla de plasma. Empezaremos por considerar un circuito de entrada que nos permita tomar la señal motivo del conteo, para lo El circuito constará de un separador de corriente continua mediante un condensador cerámico de baja capacidad (47nf/400V


5 Diodos rectificadores El encapsulado de estos diodos depende de la potencia que hayan de disipar. Para los de baja y media potencia se emplea el plástico hasta un límite de alrededor de 1 vatio. Por encima de este valor se hace necesario un encapsulado metálico y en potencias más altos deberá estar la cápsula preparada para que pueda ser instalado el diodo sobre un radiador de color, por medio de un sistema de sujeción a tornillo. Cualquier sistema rectificador de corrientes, tanto monofásicas como trifásicas o polifásicas, se realiza empleando varios diodos según una forma de conexión denominada en puente. No obstante, también se utiliza otro sistema con dos diodos, como alternativa del puente en algunos circuitos de alimentación monofásicos. Debido al gran consumo a nivel mundial de diodos que más tarde son empleados en montajes puente, los fabricantes decidieron, en un determinado momento, realizar ellos mismos esta disposición, uniendo en fábrica los cuatro diodos y cubriéndolos con un encapsulado común. En los tipos de mayor disipación, la cápsula del puente es metálica y está preparada para ser montada sobre un radiador. Características Cualquier diodo rectificador está caracterizado por los siguientes factores: - Corriente directa máxima (If). - Tensión directa (Vd), para una corriente If determinada. - Tensión inversa máxima de pico de trabajo (VRWM). - Tensión inversa máxima de pico repetitiva (VRRM). - Corriente máxima de pico (Ifsm). - Corriente inversa máxima de pico (IRM), medida a VRRM. - Potencia total (P/tot). Estas características deberán ser tenidas en cuenta en el momento de la elección del modelo más adecuado para cada aplicación, procurando no ajustarse demasiado a los valores límites, ya que ello acortaría excesivamente la duración del componente. - Tensión inversa (Vr), hasta 75 V como máximo. - Corriente directa (If), 100 ma. - Potencia máxima (P/tot), 200 milivatios (mw) El encapsulado es en forma de un cilindro miniatura, de plástico o vidrio, estando los dos terminales de conexión situados en los extremos. Sobre el cuerpo deberá estar marcado el hilo de conexión que corresponde al cátodo, mediante un anillo situado en las proximidades de éste.


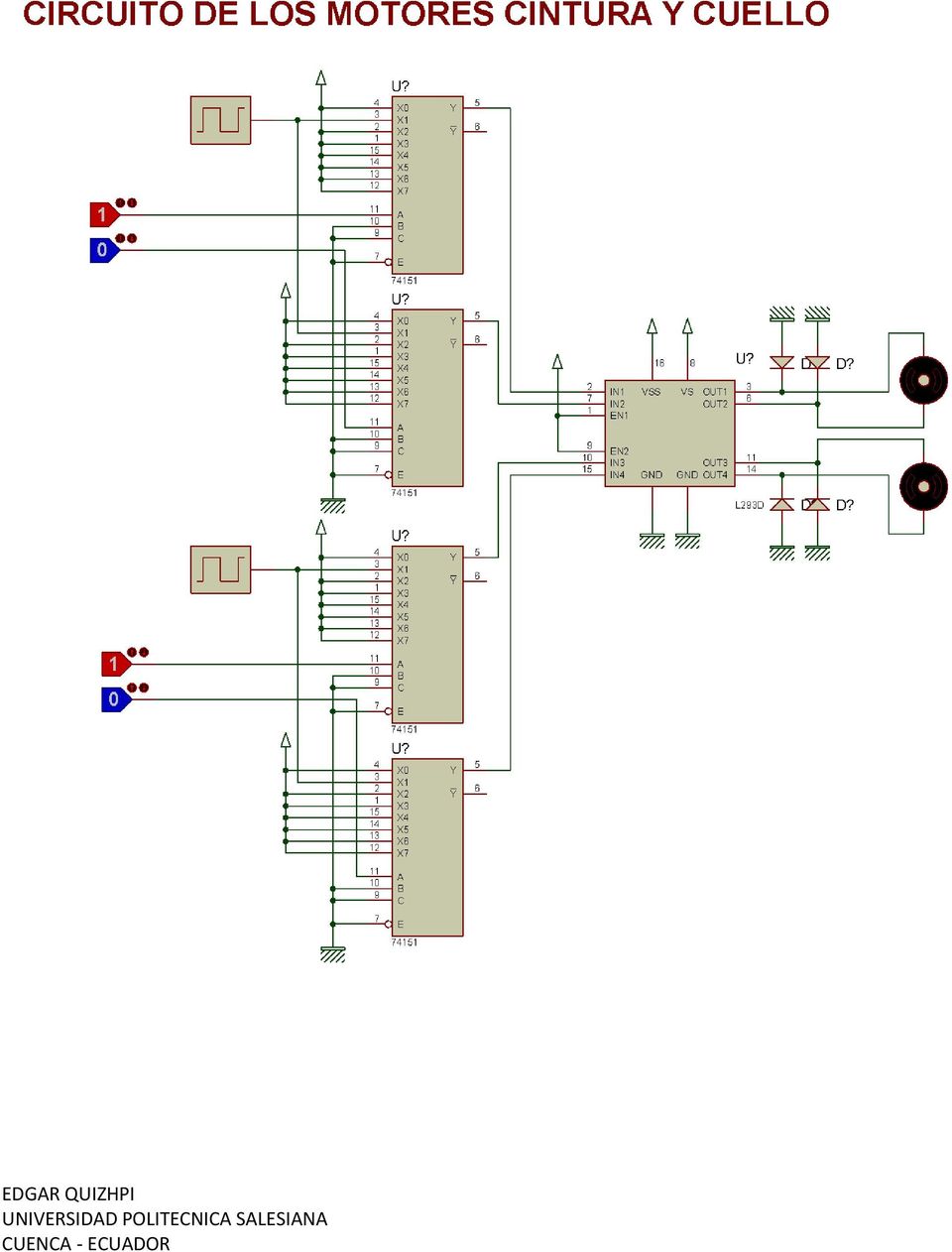
6 MULTIPLEXORES Un multiplexor es un circuito combinacional con 2 n líneas de entrada de datos, 1 línea de salida y n entradas de selección. Las entradas de selección indican cuál de estas líneas de entrada de datos es la que proporciona el valor a la línea de salida. También se pueden construir multiplexores con mayor número de entradas utilizando multiplexores de menos entradas, utilizando la composición de multiplexores. Estos son usados para el control de un flujo de información que equivale a un conmutador. En su forma más básica se compone de dos entradas de datos (A y B), una salida de datos y una entrada de control. Cuando la entrada de control se pone a 0 lógico, la señal de datos A es conectada a la salida; cuando la entrada de control se pone a 1 lógico, la señal de datos B es la que se conecta a la salida... El multiplexor es una aplicación particular de los decodificadores, tal que existe una entrada de habilitación (EN) por cada puerta AND y al final se hace un OR entre todas las salidas de las puertas AND. La función de un multiplexor da lugar a diversas aplicaciones: Selector de entradas. Serializado: Convierte datos desde el formato paralelo al formato serie. Transmisión multiplexada: Utilizando las mismas líneas de conexión, se transmiten diferentes datos de distinta procedencia. Realización de funciones lógicas: Utilizando inversores y conectando a 0 ó 1 las entradas según interese, se consigue diseñar funciones complejas, de un modo más compacto que con las tradicionales puertas, El puente H. CI L293B Un Puente H o Puente en H es un circuito electrónico que permite a un motor eléctrico DC girar en ambos sentidos, avance y retroceso. Son ampliamente usados en robótica y como convertidores de potencia. Los puentes H están disponibles como circuitos integrados, pero también pueden construirse a partir de componentes discretos.

 están cerrados (y S2 y S3 abiertos) se aplica una tensión positiva en el motor, haciéndolo girar en un sentido.")
7 El término "puente H" proviene de la típica representación gráfica del circuito. Un puente H se construye con 4 interruptores (mecánicos o mediante transistores). Cuando los interruptores S1 y S4 (ver primera figura) están cerrados (y S2 y S3 abiertos) se aplica una tensión positiva en el motor, haciéndolo girar en un sentido. Abriendo los interruptores S1 y S4 (y cerrando S2 y S3), el voltaje se invierte, permitiendo el giro en sentido inverso del motor.con la nomenclatura que estamos usando, los interruptores S1 y S2 nunca podrán estar cerrados al mismo tiempo, porque esto cortocircuitaría la fuente de tensión. Lo mismo sucede con S3 y S4. Circuito Integrado L293B Existen también puentes H integrados tales como el L293D, en resumen este tipo de circuitos integrados traen en su interior 2 puentes H independientes teniendo las entradas para el control de giro y una entrada de enable (usada comunmente como entrada PWM), cabe destacar que en estos circuitos se usa una alimentacion para el CI y una para los motores, lo que permite que se puedan manejar cargas relativamente exigentes. La logica de control es compatible con niveles TTL y CMOS. APLICACIONES. En este apartado se muestran distintas configuraciones de conexión de motores al L293B 1. GIRO DE 2 MOTORES EN UNICO SENTIDO. En la Figura 4 se muestra el modo de funcionamiento de dos motores de corriente continua que giran en un único sentido. El motor M1 se activa al poner a nivel bajo la entrada de control A. El motor M2 se activa al poner a nivel alto la entrada de control B

8 Su tabla de funcionamiento es la siguiente: Los diodos D1 y D2, están conectados para proteger el circuito cuando se generan los picos de arranque de los motores. Si no se trabaja a máxima potencia de trabajo pueden eliminarse del circuito. CONTROL DEL GIRO DE UN MOTOR EN LOS DOS SENTIDOS El circuito de la Figura 5 permite controlar el doble sentido de giro del motor. Cuando la entrada C está a nivel bajo y la D a nivel alto, el motor gira hacia la izquierda. Cambiando la entrada C a nivel alto y la D a nivel Bajo, se cambia el sentido de giro del motor hacia la derecha. Motores Básicamente existen dos tipos los motores de corriente continua y motores de corriente directa y los servo motores o motores paso a paso (stepper motors). En las secciones

9 siguientes se detallan los componentes que integran cada uno de ellos, el uso típico que se les da a la hora de construir robots y ejemplos del circuito de control de los mismos. Motor de corriente continua (DC) Los micromotores DC (Direct Current) o también llamados CC (Corriente Continua) son muy utilizados en robótica. Los hay de distintos tamaños, formas y potencias, pero todos se basan en el mismo principio de funcionamiento. Accionar un motor DC es muy simple y solo es necesario aplicar la tensión de alimentación entre sus bornes. Para invertir el sentido de giro basta con invertir la alimentación y el motor comenzará a girar en sentido opuesto. A diferencia de los motores paso a paso y los servomecanismos, los motores DC no pueden posicionados y/o enclavados en una posición específica. Estos simplemente giran a la máxima velocidad y en el sentido que la alimentación aplicada se los permite. Componentes de un motor DC El motor de corriente continua está compuesto de 2 piezas fundamentales: Rotor Estator EL SERVO MOTOR El servo es un pequeño pero potente dispositivo que dispone en su interior de un pequeño motor con un reductor de velocidad y multiplicador de fuerza, también dispone de un pequeño circuito que gobierna el sistema. El recorrido del eje de salida es de 180º en la mayoría de ellos, pero puede ser fácilmente modificado para tener un recorrido libre de 360º y actuar así como un motor. Funcionamiento: El control de posición lo efectúa el servo internamente mediante un potenciómetro que va conectado mecánicamente al eje de salida y controla un pwm (modulador de anchura de pulsos) interno para así compararlo con la entrada pwm externa del servo, mediante un sistema diferencial, y asi modificar la posición del eje de salida hasta que los valores se igualen y el servo pare en la posición indicada, en esta posición el motor del servo deja de consumir corriente y tan solo circula una pequeña corriente hasta el circuito interno, si forzamos el servo (moviendo el eje de salida con la mano) en este momento el control diferencial interno lo detecta y envía la corriente necesaria al motor para corregir la posición. Para controlar un servo tendremos que aplicar un pulso de duración y frecuencia específicos. todos los servos disponen de tres cables dos para alimentación Vcc y Gnd y otro

 disposición de cables Fabricante min. neutral. máx.")
10 cable para aplicar el tren de pulsos de control que harán que el circuito de control diferencial interno ponga el servo en la posición indicada por la anchura del pulso. En la siguiente tabla están indicados los valores de control y disposición de cables de varias marcas que comercializan servos. Duración pulso (ms) disposición de cables Fabricante min. neutral. máx.. Hz + batt -batt pwm. Futaba rojo negro blanco Hitech rojo negro amarillo Graupner/Jr rojo marrón naranja Multiplex rojo negro amarillo Robbe rojo negro blanco Simprop rojo azul negro

11 4.- DESARROLLO Al realizar la maqueta se origino algunos problemas ya que el movimiento de los motores no tenía la suficiente fuerza para alzar o mover las diferentes piezas del monigote. Entonces se tomó la decisión de utilizar un material que sea liviano y no costoso se utilizó la espuma flex, pero de igual manera se tuvo que hacer primero una base de madera liviana para de ahí poder esculpir cada una de las piezas, igual se tuvo que tomar muy en cuenta el espacio donde se iban a poner los circuitos ya armados, es decir se hizo unas pequeñas aberturas en la parte inferior de la pierna donde estarían los cables para alimentar los circuitos y así se tornó más fácil ya que no hubo ningún problema al intentar luego unir lo armado con lo construido. Ademas con la utilización de la espuma se torno muy fácil al momento de hacer cualquier tipo de corte ya que es muy fácil al momento de cortar. Ademas teníamos que ser muy cuidadosos al momento de pintar es por eso que se tuvo que dar minuciosamente varias capas con pintura de agua, pero eso si era necesario lijar la espuma ya pintada para la obtención de un trabajo excelente. Lo que se pudo notar que tuvo un poco de complicación fue el de construir la cabeza ya que tenia algunas distorsiones y se tuvo que hacer moldes para obtener la mascara deseada. Asi mismo se tuvo que cavar dentro de la cabeza hecho de espuma para que se facilite al momento de pegar los circuitos ya realizados.

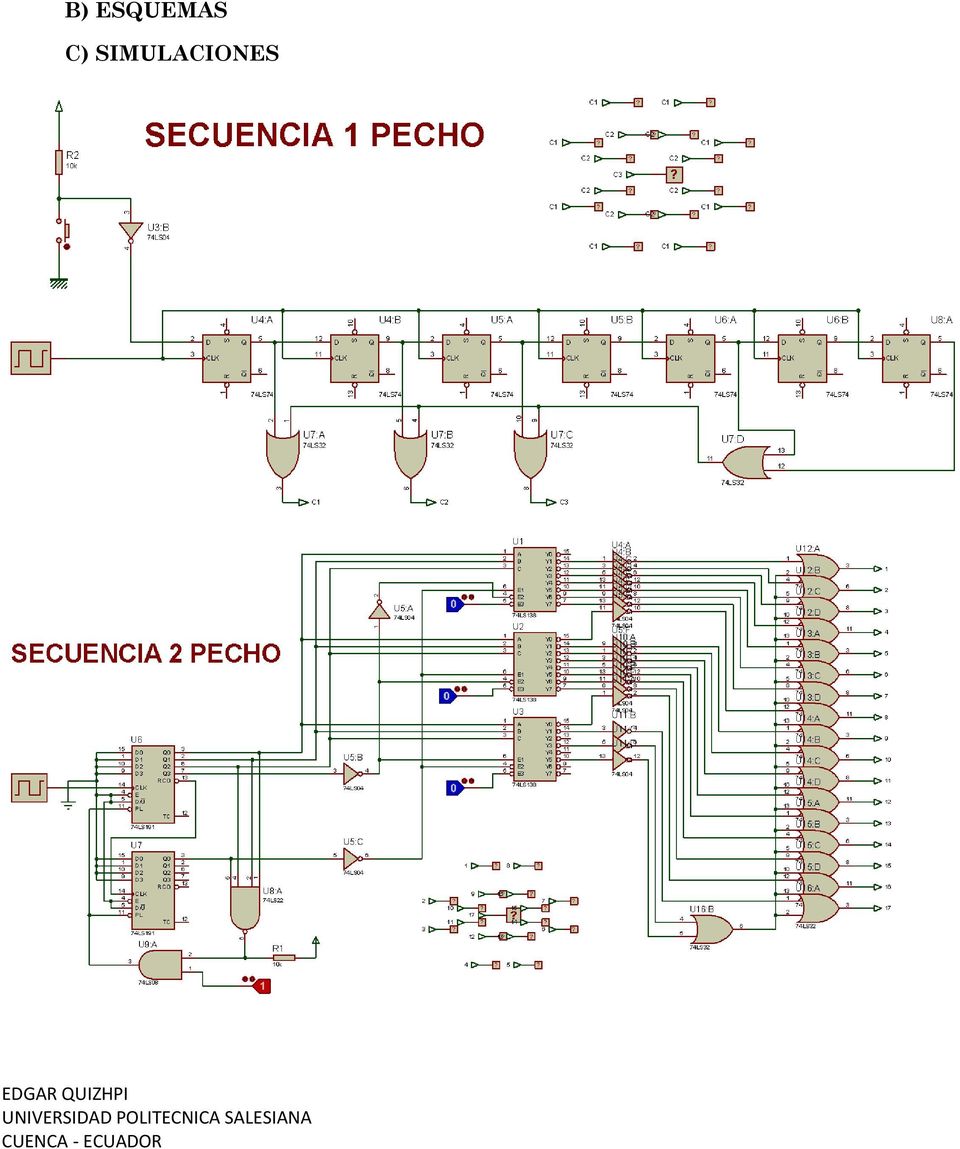
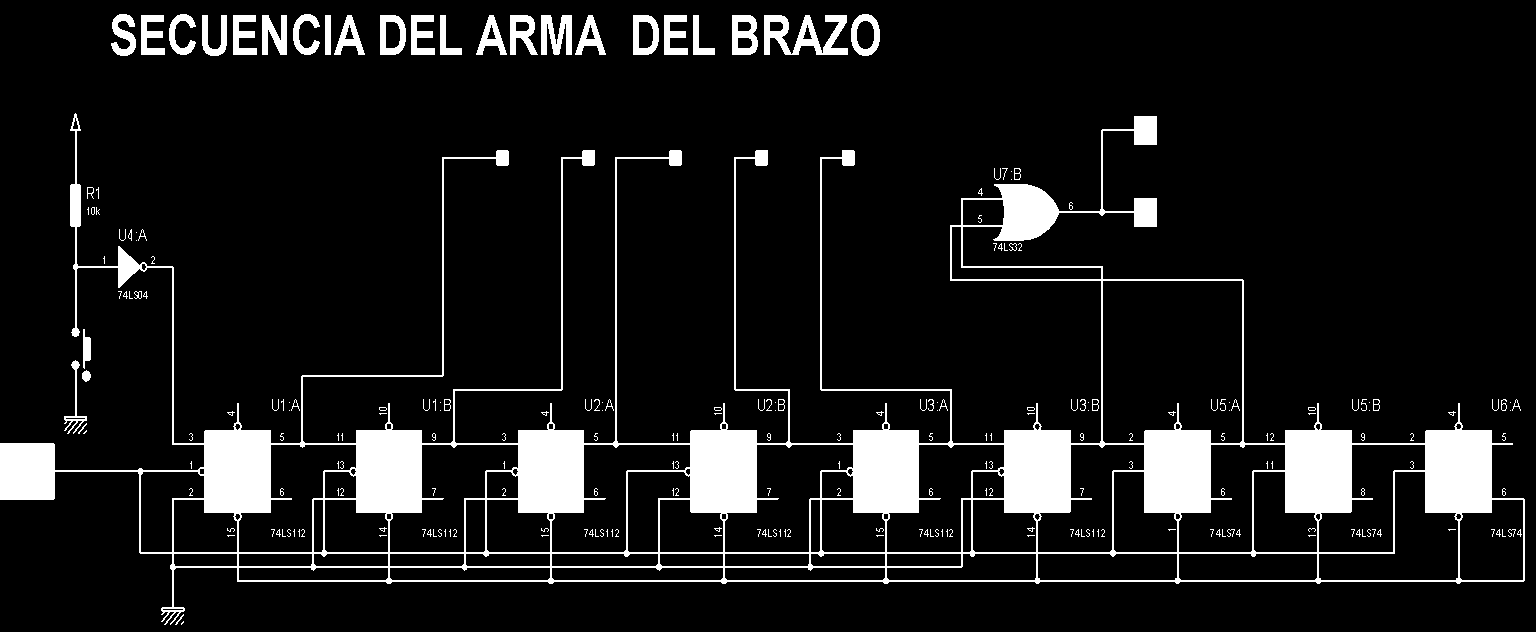
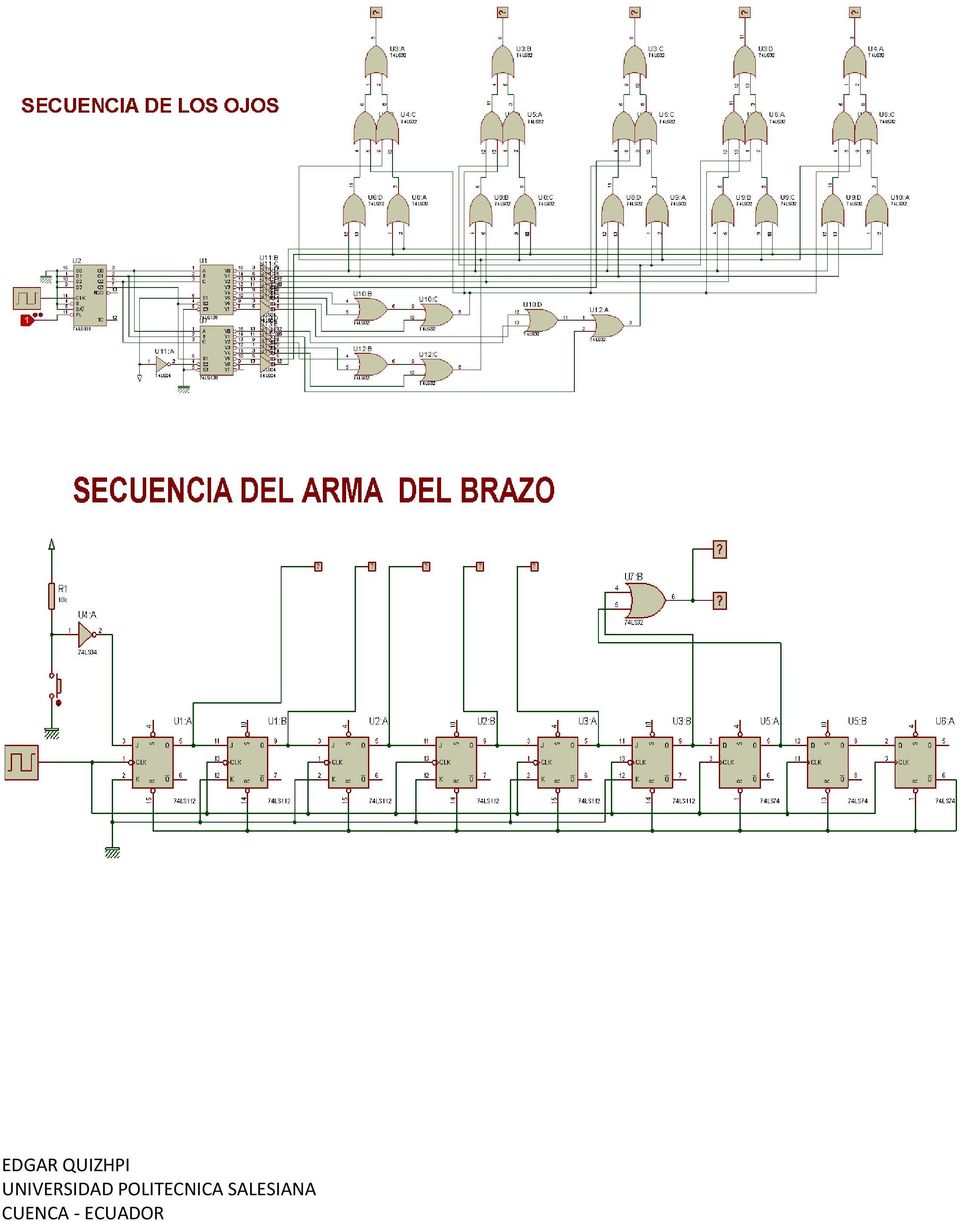
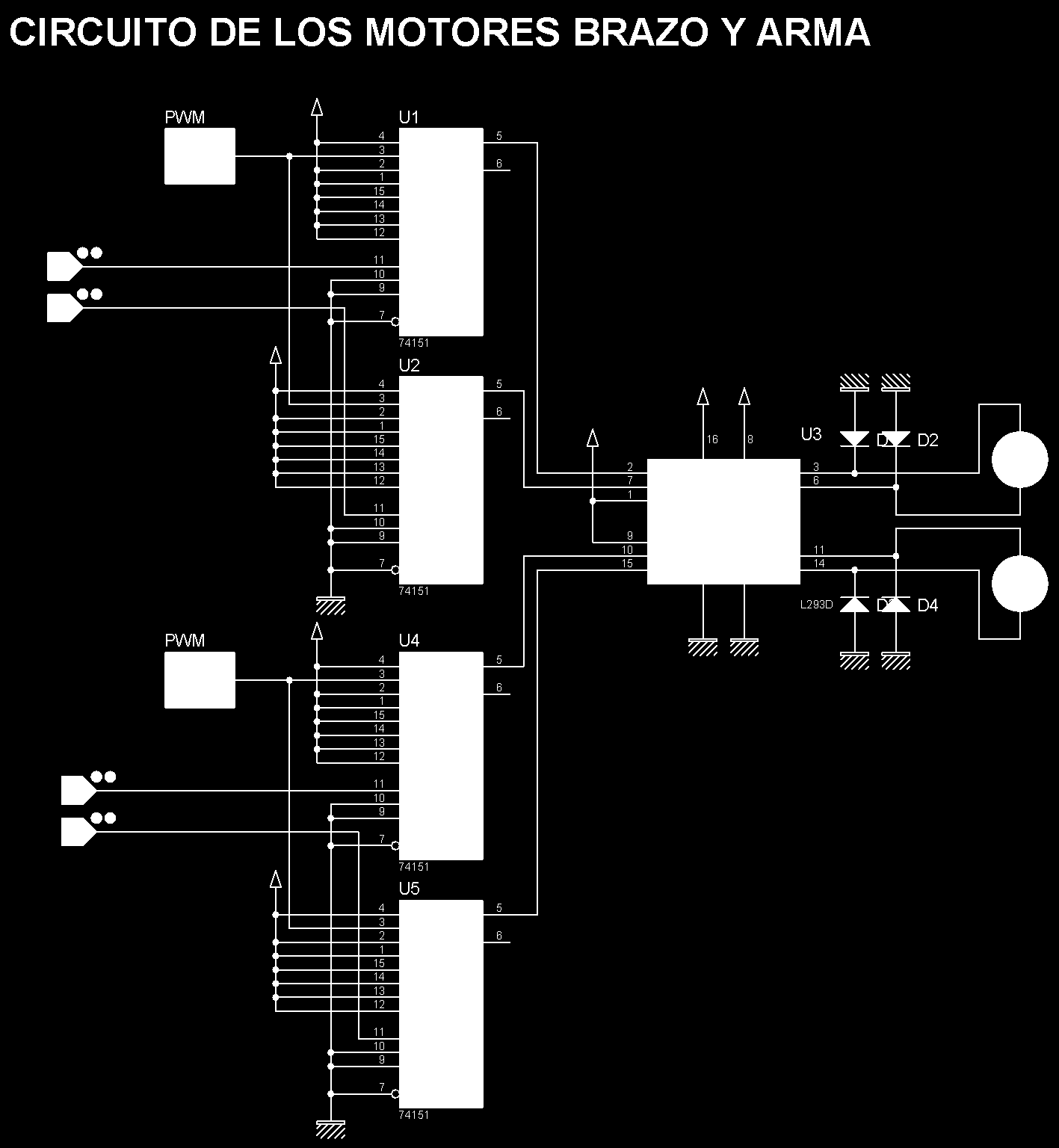
12 Para la construcción de las armas se hizo de una manera muy original y detallista, se utilizaron materiales reciclables como tubos, fomix, y pistolas de juguete, y asi se dio unas pistolas de acción muy creativas. A) ANÁLISIS En el proyecto realizado se ha aplicado todos los conocimientos de electrónica Analógica, Electrónica Digital, y un poco de investigación de programación de pics en Visual Basic. Se pudo comprobar que la utilización de los multiplexores fue de gran utilidad para el movimiento de los motores de corriente continua. Además los flip-flops se tornaron de manera óptima para la operación de los circuitos ya que se utilizó los de tipo D para el corte de frecuencia y para los diferentes tipos de tiempos, al igual manera los de tipo J-k se utilizó para el control de tiempo. Para el movimiento de los motores de corriente continua se utilizó inversiones de giro, la inversión se la hizo con un LM317 aplicado a puente H. Para la secuencia del pecho se da una activación en los flip-flops J-k hasta que se de un uno lógico y de ahí se carga automáticamente cada uno de los leds, es decir primero c1 que son los primeros 8 leds y de ahí c2 es decir los siguientes 8 leds y c3 que es el ultimo led del centro, luego se tiene una visualización de los 17 leds totales se encienden al mismo tiempo, pero con una activación de 2 veces todos los leds, luego conmuta del cero al uno, se activa los contadores en binario del cero al 15 y se obtiene una segunda secuencia de activación de c1 que se activa de uno en uno los leds en sentido antihorario, y de igual manera c2 y c3 y de ahí se tiene un reinicio total, para el comienzo de la secuencia original. Para la secuencia de los ojos siempre va estar encendido ya que lo hicimos automatico, se utilizo un contador de 0 a 15 y se utilizo un pulso para activar el clock y de ahí se tiene un bit 0 de activación que nos da que se enciendan los cinco leds luego el 1 bit de activación nos da que se encienda los rojos el 3 bit solo los azules y el 4 bit solo el del medio, y asi sucesivamente hasta llegar al bit 14 y al momento de llegar el 15 bit se activa los leds del arma que se utilizo flip flops pero lo mas importante es que los de tipo D nos da el tiempo necesario de retardo.

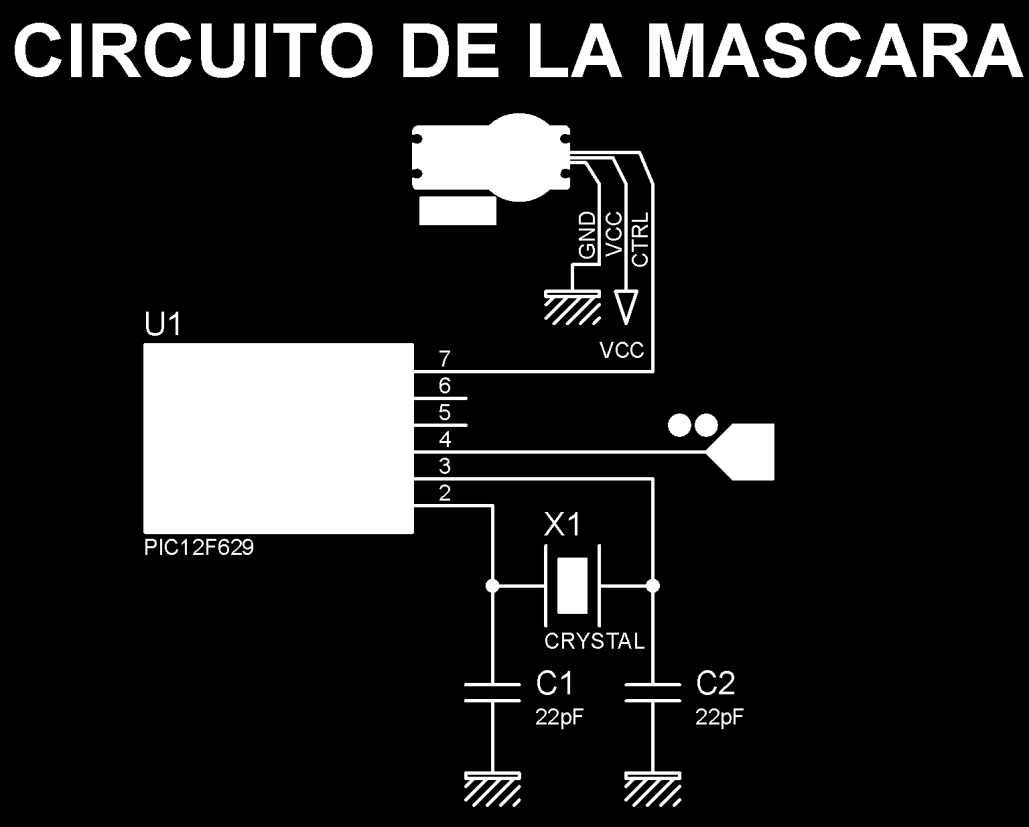
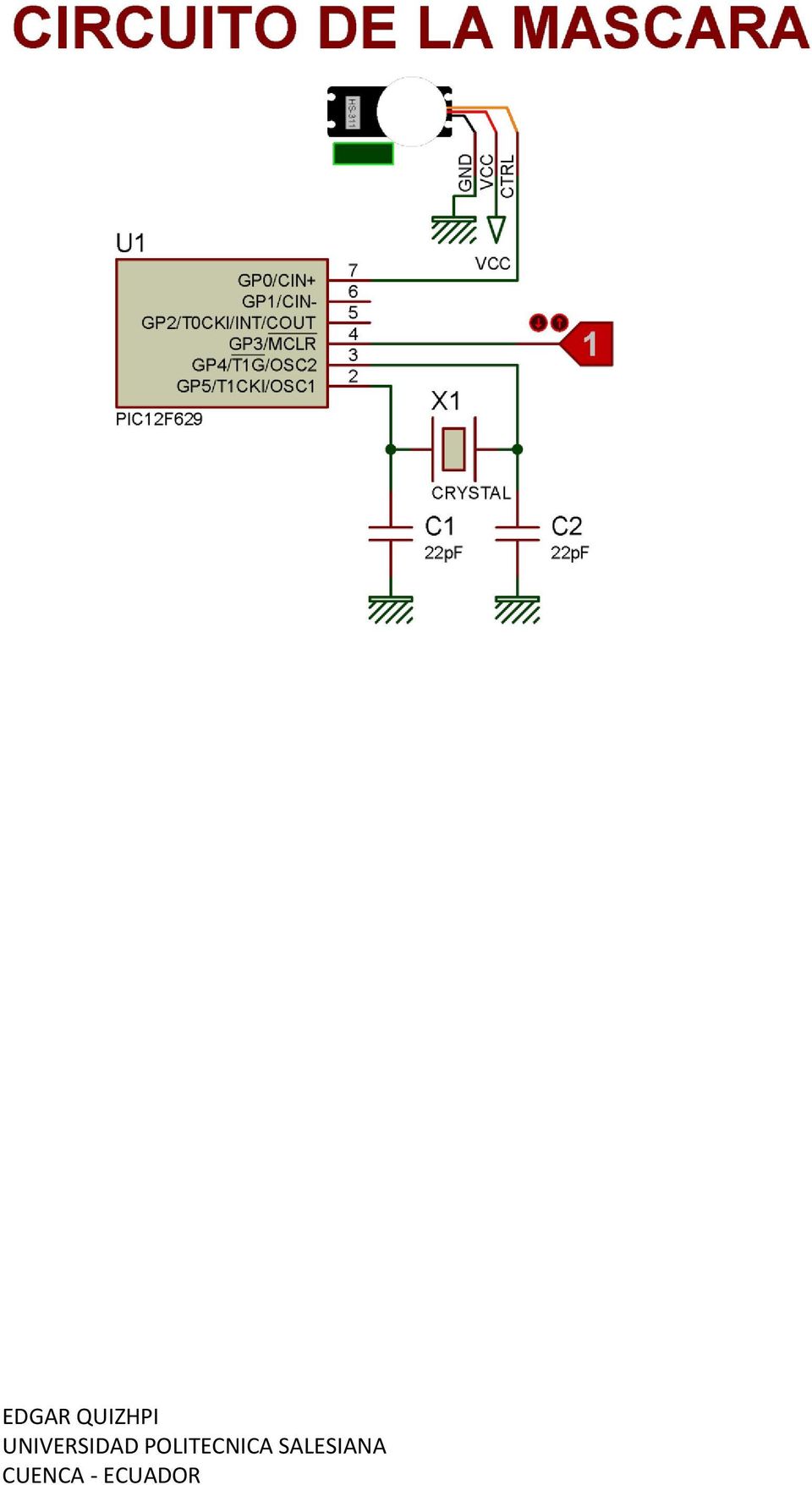
13 PROGRAMACION DEL SERVO DE LA MASCARA PROGRAMACION EN PICBASIC (LIBRO programación básica de pic) '**************************************************************** '* Name : UNTITLED.BAS * '* Author : [select VIEW...EDITOR OPTIONS] * '* Notice : Copyright (c) 2010 [select VIEW...EDITOR OPTIONS] * '* : All Rights Reserved * '* Date : 12/12/2010 * '* Version : 1.0 * '* Notes : * '* : * '**************************************************************** cmcon=7 c var byte trisio=0 gpio=0 inicio: for c=50 to 250 step 1 pulsout gpio.0,c pause 50 next for c=250 to 50 step -1 pulsout gpio.0,c pause 50 next for c=50 to 150 step 1 pulsout gpio.0,c pause 50 next for c=150 to 50 step -1 pulsout gpio.0,c pause 50 next goto inicio
![..EDITOR OPTIONS] * '* : All Rights Reserved * '* Date : 12/12/2010 * '* Version : 1.](/docs-images/40/10320707/images/page_13.jpg "0 * '* Notes : * '* : * '**************************************************************** cmcon=7 c var byte trisio=0 gpio=0 inicio: for c=50 to 250 step 1 pulsout gpio.")
")
14 B) ESQUEMAS C) SIMULACIONES
15
16

17

18
19 5.- MATERIALES Y HERRAMIENTAS Protoboards Pinzas. Playo, estilete Multimetro Cautin Taladro Destornilladores Espuma flex Fomix Hilo Madera Pernos Tornillos Pintura Tubo condui Silicona C.I. 555, L293B, 74ls00, 74ls04, 74ls08, 74ls11, 74ls112, 74ls138, 74ls151, 74ls191, 74ls22, 74ls32. Cable multipar a aislante Condensadores Resistencias Diodos Estaño Interruptores de 2 puestos Leds de alto brillo Leds jumbo Motores de CC Motores servos

20 6.- PRESUPUESTO materiales electronicos materiales de la maqueta # Unidades Elementos P. Unitario P. Total # Unidades Elementos P. Unitario P. Total 1 6 C.I 555 0,45 2, carton maqueta 0,35 0, C.I. L293B 3,50 10, silicona 0,75 1, C.I. 74ls00 0,40 3, fomix 2,15 15, C.I. 74ls04 0,40 2, hilo 0,10 0, C.I. 74ls08 0,40 1, madera 1,00 1, C.I. 74ls11 0,60 3, pernos 0,05 0, C.I. 74ls112 0,65 5, pintura 4,50 22, C.I. 74ls138 0,75 3, tornillos 0,10 0, C.I. 74ls151 0,75 6, tubo condui 1,25 1, C.I. 74ls191 2,00 8,00 espuma flex 11 2 C.I. 74ls22 0,40 0,80 Gasto general 164, C.I. 74ls32 0,40 5, cable multipar 12pares 1,25 6, cautin 1,25 1,25 Grasto total del proyecto 15 2 cinta aislante 0,70 1, condensadores 0,10 2, diodos 0,05 1, estaño 2,50 2, interruptores de 2 puestos 0,35 2, leds de alto brillo 0,25 10, leds jumbo 1,75 7, motores de CC 2,00 8, motores servos 20,00 20, reles 0,45 1, boquillas 0,50 2, focos 0,85 3, CONCLUSIONES Y RECOMENDACIONES Un punto importante que debemos tener en cuenta es que cuando trabajamos con capacitores electrolíticos se debe tener extrema precaución con la polaridad de las terminales del dispositivo, ya que al conectarlo con la polaridad invertida, el dispositivo podría explotar causando lesiones o accidentes. 8.- BIBLIOGRAFÍA

21 FACULTAD DE INGENIERIAS INTEGRANTES: Pablo Auquilla Manuel Deleg Paulino Chasijuan Vinicio Quizhpi Maricela Rivera Johnny Siguenza Ruben Velez PROYECTO FINAL DE ELECTRONICA DIGITAL: Sexy Iron Baby DOCENTE: Ing. Rene Avila
SERVOMOTORES. Los servos se utilizan frecuentemente en sistemas de radiocontrol, mecatrónicos y robótica, pero su uso no está limitado a estos.
 SERVOMOTORES Un servomotor (también llamado Servo) es un dispositivo similar a un motor DC, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación y mantenerse estable
SERVOMOTORES Un servomotor (también llamado Servo) es un dispositivo similar a un motor DC, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación y mantenerse estable
Una vez descrita la constitución general de un robot, podemos empezar con la
 CAPÍTULO 2 Construcción y Mecanismo de Operación del Brazo Robótico Una vez descrita la constitución general de un robot, podemos empezar con la descripción de nuestro robot, cómo fue construido y cómo
CAPÍTULO 2 Construcción y Mecanismo de Operación del Brazo Robótico Una vez descrita la constitución general de un robot, podemos empezar con la descripción de nuestro robot, cómo fue construido y cómo
CIRCUITOS SECUENCIALES
 LABORATORIO # 7 Realización: 16-06-2011 CIRCUITOS SECUENCIALES 1. OBJETIVOS Diseñar e implementar circuitos utilizando circuitos multivibradores. Comprender los circuitos el funcionamiento de los circuitos
LABORATORIO # 7 Realización: 16-06-2011 CIRCUITOS SECUENCIALES 1. OBJETIVOS Diseñar e implementar circuitos utilizando circuitos multivibradores. Comprender los circuitos el funcionamiento de los circuitos
Figura 1: Símbolo lógico de un flip-flop SR
 FLIP-FLOPS Los circuitos lógicos se clasifican en dos categorías. Los grupos de puertas descritos hasta ahora, y los que se denominan circuitos lógicos secuenciales. Los bloques básicos para construir
FLIP-FLOPS Los circuitos lógicos se clasifican en dos categorías. Los grupos de puertas descritos hasta ahora, y los que se denominan circuitos lógicos secuenciales. Los bloques básicos para construir
TEMA 5. ELECTRÓNICA DIGITAL
 TEMA 5. ELECTRÓNICA DIGITAL 1. INTRODUCCIÓN Los ordenadores están compuestos de elementos electrónicos cuyas señales, en principio, son analógicas. Pero las señales que entiende el ordenador son digitales.
TEMA 5. ELECTRÓNICA DIGITAL 1. INTRODUCCIÓN Los ordenadores están compuestos de elementos electrónicos cuyas señales, en principio, son analógicas. Pero las señales que entiende el ordenador son digitales.
FUENTES DE ALIMENTACION
 FUENTES DE ALIMENTACION INTRODUCCIÓN Podemos definir fuente de alimentación como aparato electrónico modificador de la electricidad que convierte la tensión alterna en una tensión continua. Remontándonos
FUENTES DE ALIMENTACION INTRODUCCIÓN Podemos definir fuente de alimentación como aparato electrónico modificador de la electricidad que convierte la tensión alterna en una tensión continua. Remontándonos
podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que el
 CAPÍTULO 4 Funcionamiento del Robot Después de analizar paso a paso el diseño y funcionamiento de la interfase, nos podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que
CAPÍTULO 4 Funcionamiento del Robot Después de analizar paso a paso el diseño y funcionamiento de la interfase, nos podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que
PLACAS FERTIRIEGO ELECTRÓNICA NUEVA
 PLACAS FERTIRIEGO ELECTRÓNICA NUEVA AVERÍAS FUENTE INTERCONEXIÓN INTERFACE C.E. INTERFACE ph LLAVE HARD RELÉS TARJETA DE 32 SALIDAS 7520 Página 1 de 20 # PLACA DE AVERÍAS 12V # AVERÍAS Página 2 de 20 CONEXIONES
PLACAS FERTIRIEGO ELECTRÓNICA NUEVA AVERÍAS FUENTE INTERCONEXIÓN INTERFACE C.E. INTERFACE ph LLAVE HARD RELÉS TARJETA DE 32 SALIDAS 7520 Página 1 de 20 # PLACA DE AVERÍAS 12V # AVERÍAS Página 2 de 20 CONEXIONES
REGISTROS DE DESPLAZAMIENTO
 REGISTROS DE DESPLAZAMIENTO Es un circuito digital que acepta datos binarios de una fuente de entrada y luego los desplaza, un bit a la vez, a través de una cadena de flip-flops. Este sistema secuencial
REGISTROS DE DESPLAZAMIENTO Es un circuito digital que acepta datos binarios de una fuente de entrada y luego los desplaza, un bit a la vez, a través de una cadena de flip-flops. Este sistema secuencial
Constructor Virtual y Simulador de Circuitos Digitales con Chips TTL
 Constructor Virtual y Simulador de Circuitos Digitales con Chips TTL Manual de Usuario (Versión 0.9.7) Ing. Arturo J. Miguel de Priego Paz Soldán www.tourdigital.net Chincha Perú, 24 de mayo de 2011 Este
Constructor Virtual y Simulador de Circuitos Digitales con Chips TTL Manual de Usuario (Versión 0.9.7) Ing. Arturo J. Miguel de Priego Paz Soldán www.tourdigital.net Chincha Perú, 24 de mayo de 2011 Este
Control de motores de CC
 Control de motores de CC Control por modulación de ancho de Pulso (PWM) Prof: Bolaños D (versión 1-8-11) Aportes propios y de Internet Uno de los problemas más fundamentales de la robótica es el control
Control de motores de CC Control por modulación de ancho de Pulso (PWM) Prof: Bolaños D (versión 1-8-11) Aportes propios y de Internet Uno de los problemas más fundamentales de la robótica es el control
INTRODUCCIÓN A LA INSTRUMENTACIÓN BÁSICA. Nociones básicas sobre el manejo de LOS EQUIPOS DEL LABORATORIO
 INTRODUCCIÓN A LA INSTRUMENTACIÓN BÁSICA Esta documentación tiene como objetivo facilitar el primer contacto del alumno con la instrumentación básica de un. Como material de apoyo para el manejo de la
INTRODUCCIÓN A LA INSTRUMENTACIÓN BÁSICA Esta documentación tiene como objetivo facilitar el primer contacto del alumno con la instrumentación básica de un. Como material de apoyo para el manejo de la
El motor eléctrico. Física. Liceo integrado de zipaquira MOTOR ELECTRICO
 El motor eléctrico Física Liceo integrado de zipaquira MOTOR ELECTRICO Motores y generadores eléctricos, grupo de aparatos que se utilizan para convertir la energía mecánica en eléctrica, o a la inversa,
El motor eléctrico Física Liceo integrado de zipaquira MOTOR ELECTRICO Motores y generadores eléctricos, grupo de aparatos que se utilizan para convertir la energía mecánica en eléctrica, o a la inversa,
La forma de manejar esta controladora es mediante un ordenador utilizando algún lenguaje de programación (Por ejemplo.: C, Visual Basic, Logo,...).
.") Instituto de Tecnologías Educativas Circuito de control El circuito de control es la parte más delicada de la controladora, ya que se encarga de controlar las entradas (Puerto LPT, Entradas Analógicas,
Instituto de Tecnologías Educativas Circuito de control El circuito de control es la parte más delicada de la controladora, ya que se encarga de controlar las entradas (Puerto LPT, Entradas Analógicas,
Flip Flops, Multivibradores y Contadores
 Flip Flops, Multivibradores y Contadores INTRODUCCION Los circuitos lógicos se clasifican en dos categorías: circuitos lógicos combinacionales y circuitos lógicos secuenciales. Los bloques básicos para
Flip Flops, Multivibradores y Contadores INTRODUCCION Los circuitos lógicos se clasifican en dos categorías: circuitos lógicos combinacionales y circuitos lógicos secuenciales. Los bloques básicos para
EducaBot. Motores y movilidad.
 CURSO PROVINCIAL: CONTROL Y ROBÓTICA EN TECNOLOGÍA ROBÓTICA EDUCATIVA EducaBot. Motores y movilidad. Manuel Hidalgo Díaz Antonio Martínez Núñez Noviembre 2009 EducaBot 1ª fase. Terminado la placa de conexionado
CURSO PROVINCIAL: CONTROL Y ROBÓTICA EN TECNOLOGÍA ROBÓTICA EDUCATIVA EducaBot. Motores y movilidad. Manuel Hidalgo Díaz Antonio Martínez Núñez Noviembre 2009 EducaBot 1ª fase. Terminado la placa de conexionado
Electrón: partícula más pequeña de un átomo, que no se encuentra en el núcleo y que posee carga eléctrica negativa.
 Electricidad: flujo o corriente de electrones. Electrón: partícula más pequeña de un átomo, que no se encuentra en el núcleo y que posee carga eléctrica negativa. Elementos básicos de un circuito: generador,
Electricidad: flujo o corriente de electrones. Electrón: partícula más pequeña de un átomo, que no se encuentra en el núcleo y que posee carga eléctrica negativa. Elementos básicos de un circuito: generador,
MODULO Nº12 TRANSISTORES MOSFET
 MODULO Nº12 TRANSISTORES MOSFET UNIDAD: CONVERTIDORES CC - CC TEMAS: Transistores MOSFET. Parámetros del Transistor MOSFET. Conmutación de Transistores MOSFET. OBJETIVOS: Comprender el funcionamiento del
MODULO Nº12 TRANSISTORES MOSFET UNIDAD: CONVERTIDORES CC - CC TEMAS: Transistores MOSFET. Parámetros del Transistor MOSFET. Conmutación de Transistores MOSFET. OBJETIVOS: Comprender el funcionamiento del
TEMA7. SISTEMAS SECUENCIALES
 Sistemas Secuenciales 1 TEMA7. SISTEMAS SECUENCIALES Los circuitos lógicos se clasifican en dos tipos: Combinacionales, aquellos cuyas salidas sólo dependen de las entradas actuales. Secuenciales, aquellos
Sistemas Secuenciales 1 TEMA7. SISTEMAS SECUENCIALES Los circuitos lógicos se clasifican en dos tipos: Combinacionales, aquellos cuyas salidas sólo dependen de las entradas actuales. Secuenciales, aquellos
1. Representación de la información en los sistemas digitales
 Oliverio J. SantanaJaria Sistemas Digitales Ingeniería Técnica en Informática de Sistemas Curso 2005 2006 1. Representación de la información en los sistemas digitales Durante Hoy Los digital tipo muchos
Oliverio J. SantanaJaria Sistemas Digitales Ingeniería Técnica en Informática de Sistemas Curso 2005 2006 1. Representación de la información en los sistemas digitales Durante Hoy Los digital tipo muchos
ELEMENTOS DE UN CIRCUITO Unidad 1. Conceptos básicos de electricidad
 ELEMENTOS DE UN CIRCUITO Unidad 1. Conceptos básicos de electricidad Qué elementos componen un circuito eléctrico? En esta unidad identificaremos los elementos fundamentales de un circuito eléctrico, nomenclatura
ELEMENTOS DE UN CIRCUITO Unidad 1. Conceptos básicos de electricidad Qué elementos componen un circuito eléctrico? En esta unidad identificaremos los elementos fundamentales de un circuito eléctrico, nomenclatura
Mediciones Eléctricas
 Mediciones Eléctricas Grupos Electrógenos Mediciones Eléctricas Página 1 de 12 Tabla de Contenido Objetivo 1: Medidas de magnitudes eléctricas... 3 Objetivo 2: Generalidades sobre instrumentos de medición...
Mediciones Eléctricas Grupos Electrógenos Mediciones Eléctricas Página 1 de 12 Tabla de Contenido Objetivo 1: Medidas de magnitudes eléctricas... 3 Objetivo 2: Generalidades sobre instrumentos de medición...
UNIDADES DE ALMACENAMIENTO DE DATOS
 1.2 MATÉMATICAS DE REDES 1.2.1 REPRESENTACIÓN BINARIA DE DATOS Los computadores manipulan y almacenan los datos usando interruptores electrónicos que están ENCENDIDOS o APAGADOS. Los computadores sólo
1.2 MATÉMATICAS DE REDES 1.2.1 REPRESENTACIÓN BINARIA DE DATOS Los computadores manipulan y almacenan los datos usando interruptores electrónicos que están ENCENDIDOS o APAGADOS. Los computadores sólo
Puertas Lógicas. Contenidos. Objetivos
 Contenidos Objetivos En esta quincena aprenderás a: Implementar funciones mediante puertas lógicas. Conocer y manejar la simbología de las puertas lógicas. Construir circuitos lógicos en el programa simulador
Contenidos Objetivos En esta quincena aprenderás a: Implementar funciones mediante puertas lógicas. Conocer y manejar la simbología de las puertas lógicas. Construir circuitos lógicos en el programa simulador
ELECTRONICA DE POTENCIA
 ELECTRONICA DE POTENCIA Compilación y armado: Sergio Pellizza Dto. Apoyatura Académica I.S.E.S. Los tiristores son una familia de dispositivos semiconductores de cuatro capas (pnpn), que se utilizan para
ELECTRONICA DE POTENCIA Compilación y armado: Sergio Pellizza Dto. Apoyatura Académica I.S.E.S. Los tiristores son una familia de dispositivos semiconductores de cuatro capas (pnpn), que se utilizan para
Tema 7. SISTEMAS SECUENCIALES SISTEMAS SECUENCIALES SÍNCRONOS
 Fundamentos de Computadores. Sistemas Secuenciales. T7-1 INDICE: Tema 7. SISTEMAS SECUENCIALES INTRODUCCIÓN SISTEMAS SECUENCIALES SÍNCRONOS TIPOS DE BIESTABLES o TABLAS DE ECITACIÓN DE LOS BIESTABLES o
Fundamentos de Computadores. Sistemas Secuenciales. T7-1 INDICE: Tema 7. SISTEMAS SECUENCIALES INTRODUCCIÓN SISTEMAS SECUENCIALES SÍNCRONOS TIPOS DE BIESTABLES o TABLAS DE ECITACIÓN DE LOS BIESTABLES o
Práctica 5. Circuitos digitales: control del nivel de un depósito
 Práctica 5. Circuitos digitales: control del nivel de un depósito 1. Objetivos Conocer el funcionamiento de sistemas de control digital. Conocer el funcionamiento y la utilidad de los circuitos integrados
Práctica 5. Circuitos digitales: control del nivel de un depósito 1. Objetivos Conocer el funcionamiento de sistemas de control digital. Conocer el funcionamiento y la utilidad de los circuitos integrados
CIRCUITOS ARITMÉTICOS
 LABORATORIO # 6 Realización: 26-05-2011 CIRCUITOS ARITMÉTICOS 1. OBJETIVOS Comprender los circuitos aritméticos dentro de la lógica binaria Utilizar sumadores totales de cuatro bits dentro de un Circuito
LABORATORIO # 6 Realización: 26-05-2011 CIRCUITOS ARITMÉTICOS 1. OBJETIVOS Comprender los circuitos aritméticos dentro de la lógica binaria Utilizar sumadores totales de cuatro bits dentro de un Circuito
GUÍA DE USUARIO Motor paso a paso REV. 1.0
 GUÍA DE USUARIO Motor paso a paso REV. 1.0 Ingeniería MCI Ltda. Luis Thayer Ojeda 0115 of. 1105, Providencia, Santiago, Chile. +56 2 23339579 www.olimex.cl cursos.olimex.cl info@olimex.cl GUÍA DE USUARIO:
GUÍA DE USUARIO Motor paso a paso REV. 1.0 Ingeniería MCI Ltda. Luis Thayer Ojeda 0115 of. 1105, Providencia, Santiago, Chile. +56 2 23339579 www.olimex.cl cursos.olimex.cl info@olimex.cl GUÍA DE USUARIO:
Control, Instrumentación e Instalaciones Ingeniería Ambiental
 Control, Instrumentación e Instalaciones Ingeniería Ambiental TEMA 3. LABORATORIO. El Autómata Siemens S7-300. Programación Básica Alfredo Rosado Curso Académico 2010-2011 Control, Instrumentación e Instalaciones.
Control, Instrumentación e Instalaciones Ingeniería Ambiental TEMA 3. LABORATORIO. El Autómata Siemens S7-300. Programación Básica Alfredo Rosado Curso Académico 2010-2011 Control, Instrumentación e Instalaciones.
UNIDADES FUNCIONALES DEL ORDENADOR TEMA 3
 UNIDADES FUNCIONALES DEL ORDENADOR TEMA 3 INTRODUCCIÓN El elemento hardware de un sistema básico de proceso de datos se puede estructurar en tres partes claramente diferenciadas en cuanto a sus funciones:
UNIDADES FUNCIONALES DEL ORDENADOR TEMA 3 INTRODUCCIÓN El elemento hardware de un sistema básico de proceso de datos se puede estructurar en tres partes claramente diferenciadas en cuanto a sus funciones:
ÍNDICE DISEÑO DE CONTADORES SÍNCRONOS JESÚS PIZARRO PELÁEZ
 ELECTRÓNICA DIGITAL DISEÑO DE CONTADORES SÍNCRONOS JESÚS PIZARRO PELÁEZ IES TRINIDAD ARROYO DPTO. DE ELECTRÓNICA ÍNDICE ÍNDICE... 1 1. LIMITACIONES DE LOS CONTADORES ASÍNCRONOS... 2 2. CONTADORES SÍNCRONOS...
ELECTRÓNICA DIGITAL DISEÑO DE CONTADORES SÍNCRONOS JESÚS PIZARRO PELÁEZ IES TRINIDAD ARROYO DPTO. DE ELECTRÓNICA ÍNDICE ÍNDICE... 1 1. LIMITACIONES DE LOS CONTADORES ASÍNCRONOS... 2 2. CONTADORES SÍNCRONOS...
Placa de control MCC03
 Placa de control MCC03 Placa de control MCC03 La placa de control basada en el micro controlador PIC 16F874A de Microchip, es la encargada del procesar los datos que se introducen en el sistema y actuar
Placa de control MCC03 Placa de control MCC03 La placa de control basada en el micro controlador PIC 16F874A de Microchip, es la encargada del procesar los datos que se introducen en el sistema y actuar
TEMA 3: Control secuencial
 TEMA 3: Control secuencial Esquema: Índice de contenido TEMA 3: Control secuencial...1 1.- Introducción...1 2.- Biestables...3 2.1.- Biestables asíncronos: el Biestable RS...4 2.1.1.- Biestable RS con
TEMA 3: Control secuencial Esquema: Índice de contenido TEMA 3: Control secuencial...1 1.- Introducción...1 2.- Biestables...3 2.1.- Biestables asíncronos: el Biestable RS...4 2.1.1.- Biestable RS con
EL LOGRO DE SU FORMACIÓN DEPENDE TAMBIÉN DE USTED INSTRUCTOR: ING. JULIO CÉSAR BEDOYA PINO ELECTRÓNICA DIGITAL 2014
 EL LOGRO DE SU FORMACIÓN DEPENDE TAMBIÉN DE USTED INSTRUCTOR: ING. JULIO CÉSAR BEDOYA PINO ELECTRÓNICA DIGITAL 2014 CONTENIDO ELECTRÓNICA DIGITAL SISTEMA DE REPRESENTACIÓN TABLA DE CONVERSIÓN EJERCICIOS
EL LOGRO DE SU FORMACIÓN DEPENDE TAMBIÉN DE USTED INSTRUCTOR: ING. JULIO CÉSAR BEDOYA PINO ELECTRÓNICA DIGITAL 2014 CONTENIDO ELECTRÓNICA DIGITAL SISTEMA DE REPRESENTACIÓN TABLA DE CONVERSIÓN EJERCICIOS
OR (+) AND( ). AND AND
 AND( ). AND AND") Algebra de Boole 2.1.Introducción 2.1. Introducción El Algebra de Boole es un sistema matemático que utiliza variables y operadores lógicos. Las variables pueden valer 0 o 1. Y las operaciones básicas
Algebra de Boole 2.1.Introducción 2.1. Introducción El Algebra de Boole es un sistema matemático que utiliza variables y operadores lógicos. Las variables pueden valer 0 o 1. Y las operaciones básicas
TRANSFORMADOR DE ALTA FRECUENCIA CON CONMUTACIÓN AUTOMÁTICA
 ÓPTIMO RENDIMIENTO Y FLEXIBILIDAD DE USO TRANSFORMADOR DE ALTA FRECUENCIA CON CONMUTACIÓN AUTOMÁTICA Una de las muchas exigencias de los inversores modernos son unos rangos de entrada y de tensión MPP
ÓPTIMO RENDIMIENTO Y FLEXIBILIDAD DE USO TRANSFORMADOR DE ALTA FRECUENCIA CON CONMUTACIÓN AUTOMÁTICA Una de las muchas exigencias de los inversores modernos son unos rangos de entrada y de tensión MPP
Nombre del estudiante: Grimaldo velazquez Rafael. Herrera Díaz Jefree. Campus: san Rafael
 Nombre del estudiante: Grimaldo velazquez Rafael Herrera Díaz Jefree Campus: san Rafael Carrera /Prepa: ingeniería en sistemas computacionales Introducción. Como en mecánica la conmutación electrónica
Nombre del estudiante: Grimaldo velazquez Rafael Herrera Díaz Jefree Campus: san Rafael Carrera /Prepa: ingeniería en sistemas computacionales Introducción. Como en mecánica la conmutación electrónica
TELEMANDO TELEFONICO I-207.2
 TELEMANDO TELEFONICO CARACTERISTICAS TECNICAS Alimentación 12 V cc. Consumo máximo 150 ma. Salidas reles / Carga máxima 230 Vca / 3A max Peso neto 78 grs Dimensiones 87 x 72 x 27 mm Temperatura trabajo
TELEMANDO TELEFONICO CARACTERISTICAS TECNICAS Alimentación 12 V cc. Consumo máximo 150 ma. Salidas reles / Carga máxima 230 Vca / 3A max Peso neto 78 grs Dimensiones 87 x 72 x 27 mm Temperatura trabajo
ANEXO - D LOGICA BINARIA Aplicada a diagramas en escalera y de bloques para la programación de un mini PLC
 ANEXO - D LOGICA BINARIA Aplicada a diagramas en escalera y de bloques para la programación de un mini PLC La lógica binaria fue desarrollada a principios del siglo XIX por el matemático George Boole para
ANEXO - D LOGICA BINARIA Aplicada a diagramas en escalera y de bloques para la programación de un mini PLC La lógica binaria fue desarrollada a principios del siglo XIX por el matemático George Boole para
MODULO Nº6 TIRISTORES UNIDIRECCIONALES
 MODULO Nº6 TIRISTORES UNIDIRECCIONLES UNIDD: CONVERTIDORES C - CC TEMS: Tiristores. Rectificador Controlado de Silicio. Parámetros del SCR. Circuitos de Encendido y pagado del SCR. Controlador de Ángulo
MODULO Nº6 TIRISTORES UNIDIRECCIONLES UNIDD: CONVERTIDORES C - CC TEMS: Tiristores. Rectificador Controlado de Silicio. Parámetros del SCR. Circuitos de Encendido y pagado del SCR. Controlador de Ángulo
Sistema de alarma de 4 zonas. Sistema de protección de 4 zonas NC con retardos de E/S. José Miguel Castillo Castillo
 Sistema de alarma de 4 zonas. Sistema de protección de 4 zonas NC con retardos de E/S. José Miguel Castillo Castillo Sistema de alarma de 4 zonas INTRODUCCIÓN. En el mercado existen infinidad de productos
Sistema de alarma de 4 zonas. Sistema de protección de 4 zonas NC con retardos de E/S. José Miguel Castillo Castillo Sistema de alarma de 4 zonas INTRODUCCIÓN. En el mercado existen infinidad de productos
INTERRUPTOR SÒNICO PARA LUCES
 INTERRUPTOR SÒNICO PARA LUCES Área temática: industria Autor: Reymi then universidad tecnológica de santiago- republica dominicana e-mail: reymi00@hotmail.com Surgimiento El desarrollo de este interruptor
INTERRUPTOR SÒNICO PARA LUCES Área temática: industria Autor: Reymi then universidad tecnológica de santiago- republica dominicana e-mail: reymi00@hotmail.com Surgimiento El desarrollo de este interruptor
MULTIMETRO DIGITAL (MARCA FLUKE. MODELO 87) INTRODUCCIÓN
 INTRODUCCIÓN") MULTIMETRO DIGITAL (MARCA FLUKE. MODELO 87) INTRODUCCIÓN Este es un compacto y preciso multímetro digital de 4 ½ dígitos, opera con batería y sirve para realizar mediciones de voltaje y corriente de C.A.
MULTIMETRO DIGITAL (MARCA FLUKE. MODELO 87) INTRODUCCIÓN Este es un compacto y preciso multímetro digital de 4 ½ dígitos, opera con batería y sirve para realizar mediciones de voltaje y corriente de C.A.
Circuitos Electrónicos. Septiembre 2005/2006. Problema 1º parcial
 Circuitos Electrónicos. Septiembre 2005/2006. Problema 1º parcial Se pretende realizar el circuito lógico interno de una máquina tragaperras de tres ruletas. El sistema completo tiene un esquema como el
Circuitos Electrónicos. Septiembre 2005/2006. Problema 1º parcial Se pretende realizar el circuito lógico interno de una máquina tragaperras de tres ruletas. El sistema completo tiene un esquema como el
Motores de Corriente Continua...3 Motores Paso a Paso...7 Bibliografía...9
 Por Guillermo Martín Díaz Alumno de: 1º Ingeniería Informática Curso 2005/2006 ËQGLFH Motores de Corriente Continua...3 Motores Paso a Paso...7 Bibliografía...9 2 0RWRUHVGH&RUULHQWHFRQWLQXD Son los mas
Por Guillermo Martín Díaz Alumno de: 1º Ingeniería Informática Curso 2005/2006 ËQGLFH Motores de Corriente Continua...3 Motores Paso a Paso...7 Bibliografía...9 2 0RWRUHVGH&RUULHQWHFRQWLQXD Son los mas
Comparadores UNIDAD V
 Comparadores UNIDAD V Tecsup Virtu@l Automatización Lógica Programable Índice MÓDULO 2: PROGRAMACIÓN AVANZADA Unidad V: COMPARADORES 1. Comparadores... 1 1.1 Introducción... 1 1.2 Objetivos... 1 1.3 Contenido...
Comparadores UNIDAD V Tecsup Virtu@l Automatización Lógica Programable Índice MÓDULO 2: PROGRAMACIÓN AVANZADA Unidad V: COMPARADORES 1. Comparadores... 1 1.1 Introducción... 1 1.2 Objetivos... 1 1.3 Contenido...
Universidad Nacional Autónoma de México E N E P A R A G O N. Laboratorio de. Control Digital. Motor de Paso a Paso. Motores Paso a Paso
 Universidad Nacional Autónoma de México E N E P A R A G O N Laboratorio de Control Digital Motor de Paso a Paso Motores Paso a Paso Un motor paso a paso es un tipo especial de motor sincrónico diseñado
Universidad Nacional Autónoma de México E N E P A R A G O N Laboratorio de Control Digital Motor de Paso a Paso Motores Paso a Paso Un motor paso a paso es un tipo especial de motor sincrónico diseñado
ELECTRÓNICA DIGITAL. Sistemas analógicos y digitales.
 ELECTRÓNICA DIGITAL El tratamiento de la información en electrónica se puede realizar de dos formas, mediante técnicas analógicas o mediante técnicas digitales. El analógico requiere un análisis detallado
ELECTRÓNICA DIGITAL El tratamiento de la información en electrónica se puede realizar de dos formas, mediante técnicas analógicas o mediante técnicas digitales. El analógico requiere un análisis detallado
Práctica de manejo de motores CC con arduino. Antonio Martínez
 Práctica de manejo de motores CC con arduino Antonio Martínez Motor CC Existen varios tipos de motores (servos, Motores de paso..), el motor que tenemos en el aula normalmente es un motor DC. Son los motores
Práctica de manejo de motores CC con arduino Antonio Martínez Motor CC Existen varios tipos de motores (servos, Motores de paso..), el motor que tenemos en el aula normalmente es un motor DC. Son los motores
CAPITULO 4. Inversores para control de velocidad de motores de
 CAPITULO 4. Inversores para control de velocidad de motores de inducción mediante relación v/f. 4.1 Introducción. La frecuencia de salida de un inversor estático está determinada por la velocidad de conmutación
CAPITULO 4. Inversores para control de velocidad de motores de inducción mediante relación v/f. 4.1 Introducción. La frecuencia de salida de un inversor estático está determinada por la velocidad de conmutación
ANTECEDENTES TEÓRICOS. EL OSCILOSCOPIO Puesta en funcionamiento
 ANTECEDENTES TEÓRICOS EL OSCILOSCOPIO Puesta en funcionamiento Poner a tierra Una buena conexión a tierra es muy importante para realizar medidas con un osciloscopio. Colocar a tierra el Osciloscopio Por
ANTECEDENTES TEÓRICOS EL OSCILOSCOPIO Puesta en funcionamiento Poner a tierra Una buena conexión a tierra es muy importante para realizar medidas con un osciloscopio. Colocar a tierra el Osciloscopio Por
CODIFICADORES Y DECODIFICADORES. DISPLAYS.
 CODIFICADORES Y DECODIFICADORES. DISPLAYS. Los codificadores son sistemas combinacionales construidos en forma en forma de circuito integrado, que se encargan de transformar una serie de señales sin codificar
CODIFICADORES Y DECODIFICADORES. DISPLAYS. Los codificadores son sistemas combinacionales construidos en forma en forma de circuito integrado, que se encargan de transformar una serie de señales sin codificar
ASOCIACIÓN DE RESISTORES
 ASOCIACIÓN DE RESISTORES Santiago Ramírez de la Piscina Millán Francisco Sierra Gómez Francisco Javier Sánchez Torres 1. INTRODUCCIÓN. Con esta práctica el alumno aprenderá a identificar los elementos
ASOCIACIÓN DE RESISTORES Santiago Ramírez de la Piscina Millán Francisco Sierra Gómez Francisco Javier Sánchez Torres 1. INTRODUCCIÓN. Con esta práctica el alumno aprenderá a identificar los elementos
9) UPS s: EN QUE CONSISTEN DE QUE Y COMO PROTEGEN
 UPS s: EN QUE CONSISTEN DE QUE Y COMO PROTEGEN") 9) UPS s: EN QUE CONSISTEN DE QUE Y COMO PROTEGEN En el mercado actual hay gran cantidad de diseños de UPS. Puede llegar a ser confuso determinar que tipo de equipo es el más conveniente para nuestra carga
9) UPS s: EN QUE CONSISTEN DE QUE Y COMO PROTEGEN En el mercado actual hay gran cantidad de diseños de UPS. Puede llegar a ser confuso determinar que tipo de equipo es el más conveniente para nuestra carga
EL TIMER 555. Descripción del Timer 555:
 EL TIMER 555 Este excepcional Circuito Integrado muy difundido en nuestros días nació hace 30 años y continúa utilizándose actualmente, veamos una muy breve reseña histórica de este C.I.. Jack Kilby ingeniero
EL TIMER 555 Este excepcional Circuito Integrado muy difundido en nuestros días nació hace 30 años y continúa utilizándose actualmente, veamos una muy breve reseña histórica de este C.I.. Jack Kilby ingeniero
Displays de 7 segmentos
 1 de 6 18/11/2010 03:52 p.m. Displays de 7 segmentos En muchos lugares públicos habréis visto unos indicadores luminosos que nos indican el turno. Normalmente son de dos dígitos, lo que les permite contar
1 de 6 18/11/2010 03:52 p.m. Displays de 7 segmentos En muchos lugares públicos habréis visto unos indicadores luminosos que nos indican el turno. Normalmente son de dos dígitos, lo que les permite contar
Medidas de la tensión de salida en variadores de velocidad con osciloscopios digitales ScopeMeter Serie 190 de Fluke
 Aplicación Medidas de la tensión de salida en variadores de velocidad con osciloscopios digitales ScopeMeter Serie 190 de Fluke Por Viditec La utilización de variadores de velocidad o "inversores de frecuencia"
Aplicación Medidas de la tensión de salida en variadores de velocidad con osciloscopios digitales ScopeMeter Serie 190 de Fluke Por Viditec La utilización de variadores de velocidad o "inversores de frecuencia"
Capítulo 1 GESTIÓN DE LA ALIMENTACIÓN
 Capítulo 1 GESTIÓN DE LA ALIMENTACIÓN 1 Introducción En un robot autónomo la gestión de la alimentación es fundamental, desde la generación de energía hasta su consumo, ya que el robot será más autónomo
Capítulo 1 GESTIÓN DE LA ALIMENTACIÓN 1 Introducción En un robot autónomo la gestión de la alimentación es fundamental, desde la generación de energía hasta su consumo, ya que el robot será más autónomo
Ensayos Básicos con las Máquinas Eléctricas Didácticas EXPERIMENTOS CON LAS MÁQUINAS ELÉCTRICAS
 Ensayos Básicos con las Máquinas Eléctricas Didácticas EXPERIMENTOS CON LAS MÁQUINAS ELÉCTRICAS Experimentos con Máquinas Eléctricas Didácticas 2 ÍNDICE 1 Introducción...3 2 Máquinas de Corriente Continua...4
Ensayos Básicos con las Máquinas Eléctricas Didácticas EXPERIMENTOS CON LAS MÁQUINAS ELÉCTRICAS Experimentos con Máquinas Eléctricas Didácticas 2 ÍNDICE 1 Introducción...3 2 Máquinas de Corriente Continua...4
Curso Completo de Electrónica Digital
 CURSO Curso Completo de Electrónica Digital Departamento de Electronica y Comunicaciones Universidad Pontifica de Salamanca en Madrid Prof. Juan González Gómez Capítulo 4 CIRCUITOS COMBINACIONALES 4.1.
CURSO Curso Completo de Electrónica Digital Departamento de Electronica y Comunicaciones Universidad Pontifica de Salamanca en Madrid Prof. Juan González Gómez Capítulo 4 CIRCUITOS COMBINACIONALES 4.1.
Características Generales Estándar:
 Características Generales Estándar: Tensión de entrada: 127 Vac (220 opcional) Tensión nominal de salida: 120 ó 127 Vac (220 opcional) Frecuencia 50/60 hz. Rango de entrada: +15% -30% Vac de tensión nominal.
Características Generales Estándar: Tensión de entrada: 127 Vac (220 opcional) Tensión nominal de salida: 120 ó 127 Vac (220 opcional) Frecuencia 50/60 hz. Rango de entrada: +15% -30% Vac de tensión nominal.
11º) APLICACIONES TÍPICAS DE LOS UPS s ON LINE:
 APLICACIONES TÍPICAS DE LOS UPS s ON LINE:") 11º) APLICACIONES TÍPICAS DE LOS UPS s ON LINE: Los UPS s ON LINE de ENERGIT S.A., tienen la finalidad de proveer constantemente energía ESTABILIZADA EN TENSIÓN Y FRECUENCIA, FILTRADA Y LIBRE DE SOBRETENSIONES,
11º) APLICACIONES TÍPICAS DE LOS UPS s ON LINE: Los UPS s ON LINE de ENERGIT S.A., tienen la finalidad de proveer constantemente energía ESTABILIZADA EN TENSIÓN Y FRECUENCIA, FILTRADA Y LIBRE DE SOBRETENSIONES,
CURSO 2010-2011 TECNOLOGÍA TECNOLOGÍA 4º ESO TEMA 5: Lógica binaria. Tecnología 4º ESO Tema 5: Lógica binaria Página 1
 Tecnología 4º ESO Tema 5: Lógica binaria Página 1 4º ESO TEMA 5: Lógica binaria Tecnología 4º ESO Tema 5: Lógica binaria Página 2 Índice de contenido 1. Señales analógicas y digitales...3 2. Código binario,
Tecnología 4º ESO Tema 5: Lógica binaria Página 1 4º ESO TEMA 5: Lógica binaria Tecnología 4º ESO Tema 5: Lógica binaria Página 2 Índice de contenido 1. Señales analógicas y digitales...3 2. Código binario,
Control de motor de pasos Para Pic12C508
 Control de motor de pasos Para Pic12C508 Entre los innumerables tipos de motores, los de pasos son quizás los consentidos de los aficionados y profesionales de la electrónica y también de la robótica.
Control de motor de pasos Para Pic12C508 Entre los innumerables tipos de motores, los de pasos son quizás los consentidos de los aficionados y profesionales de la electrónica y también de la robótica.
Componentes: RESISTENCIAS FIJAS
 ELECTRÓNICA ELECTRÓNICA Componentes: RESISTENCIAS FIJAS Componentes: RESISTENCIAS VARIABLES Componentes: RESISTENCIAS DEPENDIENTES Componentes: RESISTENCIAS DEPENDIENTES Componentes: CONDENSADORES Componentes:
ELECTRÓNICA ELECTRÓNICA Componentes: RESISTENCIAS FIJAS Componentes: RESISTENCIAS VARIABLES Componentes: RESISTENCIAS DEPENDIENTES Componentes: RESISTENCIAS DEPENDIENTES Componentes: CONDENSADORES Componentes:
Práctica 1. Programación y Simulación de un PLC
 Automatización Avanzada (37800) Máster en Automática y Robótica Práctica 1. Programación y Simulación de un PLC Francisco Andrés Candelas Herías Grupo de Innovación Educativa en Automática 2011 GITE IEA
Automatización Avanzada (37800) Máster en Automática y Robótica Práctica 1. Programación y Simulación de un PLC Francisco Andrés Candelas Herías Grupo de Innovación Educativa en Automática 2011 GITE IEA
Un contador es un circuito secuencial que genera una secuencia ordenada de salidas que se repite en el tiempo. La salida coincide con el estado de
 CONTADORES Un contador es un circuito secuencial que genera una secuencia ordenada de salidas que se repite en el tiempo. La salida coincide con el estado de sus biestables. Los contadores son circuitos
CONTADORES Un contador es un circuito secuencial que genera una secuencia ordenada de salidas que se repite en el tiempo. La salida coincide con el estado de sus biestables. Los contadores son circuitos
El Vehículo Eléctrico
 CAPÍTULO 4 El Vehículo Eléctrico 4.1 INTRODUCCIÓN. Como se mencionó a lo largo del capítulo 1, el sistema se desarrolla sobre un vehículo eléctrico infantil, cuyo funcionamiento difiere, en gran medida,
CAPÍTULO 4 El Vehículo Eléctrico 4.1 INTRODUCCIÓN. Como se mencionó a lo largo del capítulo 1, el sistema se desarrolla sobre un vehículo eléctrico infantil, cuyo funcionamiento difiere, en gran medida,
Trabajo de Microrrobots: SENSORES DE MEDIDA POR CONTACTO
 Trabajo de Microrrobots: SENSORES DE MEDIDA POR CONTACTO PRINCIPIO DE FUNCIONAMIENTO DE LOS SENSORES DE CONTACTO TIPOS DE SENSORES DE CONTACTO ALGUNOS DISPOSITIVOS COMERCIALES DE SENSORES DE CONTACTO APLICACIÓN
Trabajo de Microrrobots: SENSORES DE MEDIDA POR CONTACTO PRINCIPIO DE FUNCIONAMIENTO DE LOS SENSORES DE CONTACTO TIPOS DE SENSORES DE CONTACTO ALGUNOS DISPOSITIVOS COMERCIALES DE SENSORES DE CONTACTO APLICACIÓN
Figura 1. Tipos de capacitores 1
 CAPACITOR EN CIRCUITO RC OBJETIVO: REGISTRAR GRÁFICAMENTE LA DESCARGA DE UN CAPACITOR Y DETERMINAR EXPERIMENTALMENTE LA CONSTANTE DE TIEMPO RC DEL CAPACITOR. Ficha 12 Figura 1. Tipos de capacitores 1 Se
CAPACITOR EN CIRCUITO RC OBJETIVO: REGISTRAR GRÁFICAMENTE LA DESCARGA DE UN CAPACITOR Y DETERMINAR EXPERIMENTALMENTE LA CONSTANTE DE TIEMPO RC DEL CAPACITOR. Ficha 12 Figura 1. Tipos de capacitores 1 Se
ACTIVIDAD 4: Puntos de interconexión y distribución
 OBJETIVOS DE LA ACTIVIDAD En la actividad anterior conocimos el esquema general de una infraestructura de acceso a servicios de telefonía en el interior de edificios, en esta actividad estudiaremos con
OBJETIVOS DE LA ACTIVIDAD En la actividad anterior conocimos el esquema general de una infraestructura de acceso a servicios de telefonía en el interior de edificios, en esta actividad estudiaremos con
PRÁCTICA Nº 1: EL VOLTÍMETRO Y EL AMPERÍMETRO
 PRÁCTICA Nº 1: EL VOLTÍMETRO Y EL AMPERÍMETRO Objetivos: Utilización de un voltímetro y de un amperímetro, caracterización de aparatos analógicos y digitales, y efecto de carga. Material: Un voltímetro
PRÁCTICA Nº 1: EL VOLTÍMETRO Y EL AMPERÍMETRO Objetivos: Utilización de un voltímetro y de un amperímetro, caracterización de aparatos analógicos y digitales, y efecto de carga. Material: Un voltímetro
Naturaleza binaria. Conversión decimal a binario
 Naturaleza binaria En los circuitos digitales sólo hay 2 voltajes. Esto significa que al utilizar 2 estados lógicos se puede asociar cada uno con un nivel de tensión, así se puede codificar cualquier número,
Naturaleza binaria En los circuitos digitales sólo hay 2 voltajes. Esto significa que al utilizar 2 estados lógicos se puede asociar cada uno con un nivel de tensión, así se puede codificar cualquier número,
Control Teaching de un Brazo Robot de Cinco Grados de Libertad
 Control Teaching de un Brazo Robot de Cinco Grados de Libertad Michel Ibáñez a610221@upc.edu.pe Christian R. Reátegui amoran@upc.edu.pe Asesor: Ing. Antonio Moran amoran@upc.edu.pe Universidad Peruana
Control Teaching de un Brazo Robot de Cinco Grados de Libertad Michel Ibáñez a610221@upc.edu.pe Christian R. Reátegui amoran@upc.edu.pe Asesor: Ing. Antonio Moran amoran@upc.edu.pe Universidad Peruana
Osciloscopios de Visualización de Dos Señales
 Osciloscopios de Visualización de Dos Señales 1- Osciloscopio de Doble Trazo. Los osciloscopios de Trazo múltiple permiten graficar dos ó más señales simultáneamente en la pantalla. A diferencia de un
Osciloscopios de Visualización de Dos Señales 1- Osciloscopio de Doble Trazo. Los osciloscopios de Trazo múltiple permiten graficar dos ó más señales simultáneamente en la pantalla. A diferencia de un
INSTITUTO TECNOLOGICO DE COSTA RICA INGENIRIA ELECTRONICA ELECTRONICA DE POTENCIA PROF. ING. JUAN CARLOS JIMENEZ TEMA: CIRCUITOS INVERSORES
 INSTITUTO TECNOLOGICO DE COSTA RICA INGENIRIA ELECTRONICA ELECTRONICA DE POTENCIA PROF. ING. JUAN CARLOS JIMENEZ TEMA: CIRCUITOS INVERSORES Son sistemas que funcionan automáticamente, sin necesidad de
INSTITUTO TECNOLOGICO DE COSTA RICA INGENIRIA ELECTRONICA ELECTRONICA DE POTENCIA PROF. ING. JUAN CARLOS JIMENEZ TEMA: CIRCUITOS INVERSORES Son sistemas que funcionan automáticamente, sin necesidad de
solecméxico Circuitos de disparo 1 CIRCUITOS DE DISPARO SCHMITT - TRIGER
 solecméxico Circuitos de disparo 1 CIRCUITOS DE DISPARO SCHMITT - TRIGER Cuando la señal de entrada se encuentra contaminada con ruido, la conmutación de un circuito digital o analógico ya no se efectúa
solecméxico Circuitos de disparo 1 CIRCUITOS DE DISPARO SCHMITT - TRIGER Cuando la señal de entrada se encuentra contaminada con ruido, la conmutación de un circuito digital o analógico ya no se efectúa
O Marlon Francisco Ramirez 750666 Marlon Francisco Ramirez marlon15r@hotmail.com nota definitiva 3,9048
 O Marlon Francisco Ramirez 70666 Marlon Francisco Ramirez marlon1r@hotmail.com nota definitiva 3,9048 70666 1 ) GRUPO AL CUAL PERTENECE 2 ) NOMBRE DEL ALUMNO 3 ) EMAIL VIGENTE DEL ALUMNO suma de notas
O Marlon Francisco Ramirez 70666 Marlon Francisco Ramirez marlon1r@hotmail.com nota definitiva 3,9048 70666 1 ) GRUPO AL CUAL PERTENECE 2 ) NOMBRE DEL ALUMNO 3 ) EMAIL VIGENTE DEL ALUMNO suma de notas
CONTADORES Y REGISTROS
 Capítulo 7 CONTADORES Y REGISTROS 7.. CONTADORES Un contador es un circuito secuencial cuya función es seguir una cuenta o conjunto predeterminado de estados como consecuencia de la aplicación de un tren
Capítulo 7 CONTADORES Y REGISTROS 7.. CONTADORES Un contador es un circuito secuencial cuya función es seguir una cuenta o conjunto predeterminado de estados como consecuencia de la aplicación de un tren
Electrónica Digital. Conceptos Digitales. Dr. Oscar Ruano 2011-2012 1
 Electrónica Digital Conceptos Digitales Dr. Oscar Ruano 2011-2012 1 Magnitudes analógicas y digitales Magnitud Analógica: toma valores continuos: Por ejemplo la temperatura no varía de entre 20ºC y 25ºC
Electrónica Digital Conceptos Digitales Dr. Oscar Ruano 2011-2012 1 Magnitudes analógicas y digitales Magnitud Analógica: toma valores continuos: Por ejemplo la temperatura no varía de entre 20ºC y 25ºC
2 Entrada binaria, 4 canales, DIN
 2114 REG Página 1 de 14 Sensores 2 Entrada binaria, 4 canales, DIN REF. 2114 REG Familia: Entrada Producto: Binaria, 4 canales 3 Descripción de las funciones: Esta entrada envía telegramas al bus, en función
2114 REG Página 1 de 14 Sensores 2 Entrada binaria, 4 canales, DIN REF. 2114 REG Familia: Entrada Producto: Binaria, 4 canales 3 Descripción de las funciones: Esta entrada envía telegramas al bus, en función
CONTROL GEAR SELECTOR BRASSA CGS
 CONTROL GEAR SELECTOR BRASSA CGS Manual de Instalación y Programación INDICE INDICE Descripción General 1 Instalación Mecánica 2 Instalación Eléctrica 3 Programación 5 DESCRIPCIÓN GENERAL Descripción
CONTROL GEAR SELECTOR BRASSA CGS Manual de Instalación y Programación INDICE INDICE Descripción General 1 Instalación Mecánica 2 Instalación Eléctrica 3 Programación 5 DESCRIPCIÓN GENERAL Descripción
Circuitos Digitales CON José Manuel Ruiz Gutiérrez
 Circuitos Digitales CON José Manuel Ruiz Gutiérrez j.m.r.gutierrez@gmail.com PRÁCTICAS DE CIRCUITOS DIGITALES Circuitos digitales básicos 1. Simulación de operadores lógicos básicos. Realizar la simulación
Circuitos Digitales CON José Manuel Ruiz Gutiérrez j.m.r.gutierrez@gmail.com PRÁCTICAS DE CIRCUITOS DIGITALES Circuitos digitales básicos 1. Simulación de operadores lógicos básicos. Realizar la simulación
U.T. 4.- CIRCUITOS ELÉCTRICOS
 U.T. 4.- CIRCUITOS ELÉCTRICOS Un circuito eléctrico es un conjunto de operadores eléctricos que, conectados entre sí de forma adecuada, permite la circulación y el control de la corriente eléctrica. OPERADORES
U.T. 4.- CIRCUITOS ELÉCTRICOS Un circuito eléctrico es un conjunto de operadores eléctricos que, conectados entre sí de forma adecuada, permite la circulación y el control de la corriente eléctrica. OPERADORES
1.1. Sección del núcleo
 1. CALCULO ANALÍTICO DE TRANSFORMADORES DE PEQUEÑA POTENCIA Los transformadores tienen rendimiento muy alto; aunque éste no lo sea tanto en la pequeña potencia, podemos considerar que la potencia del primario
1. CALCULO ANALÍTICO DE TRANSFORMADORES DE PEQUEÑA POTENCIA Los transformadores tienen rendimiento muy alto; aunque éste no lo sea tanto en la pequeña potencia, podemos considerar que la potencia del primario
CALIDAD EN TUBOS T8 LED
 CALIDAD EN TUBOS T8 LED Realizamos una comparación entre tres tipos de tubo LED, cada uno con diferente calidad; en este documento se explican sus diferencias. T8 120cm -18W Alta Calidad YAPI LED s Para
CALIDAD EN TUBOS T8 LED Realizamos una comparación entre tres tipos de tubo LED, cada uno con diferente calidad; en este documento se explican sus diferencias. T8 120cm -18W Alta Calidad YAPI LED s Para
variadores de velocidad electrónicos
 sumario arrancadores y variadores de velocidad electrónicos 1 principales tipos de variadores 2 principales funciones de los arrancadores y variadores de velocidad electrónicos 3 composición 4 principales
sumario arrancadores y variadores de velocidad electrónicos 1 principales tipos de variadores 2 principales funciones de los arrancadores y variadores de velocidad electrónicos 3 composición 4 principales
Transformación de binario a decimal. Transformación de decimal a binario. ELECTRÓNICA DIGITAL
 ELECTRÓNICA DIGITAL La electrónica es la rama de la ciencia que se ocupa del estudio de los circuitos y de sus componentes, que permiten modificar la corriente eléctrica amplificándola, atenuándola, rectificándola
ELECTRÓNICA DIGITAL La electrónica es la rama de la ciencia que se ocupa del estudio de los circuitos y de sus componentes, que permiten modificar la corriente eléctrica amplificándola, atenuándola, rectificándola
ALTERNADOR FUNCIONAMIENTO DEL UNIVERSIDAD DE GUALAJARA TEC: JUAN CARLOS SEDANO DE LA ROSA
 UNIVERSIDAD DE GUALAJARA CENTRO UNIVERSITARIO DE LA COSTA SUR DIVISIÓN DE DESARROLLO REGIONAL DEPARTAMENTO DE INGENIERÍAS FUNCIONAMIENTO DEL ALTERNADOR TEC: JUAN CARLOS SEDANO DE LA ROSA FUNCIONAMIENTO
UNIVERSIDAD DE GUALAJARA CENTRO UNIVERSITARIO DE LA COSTA SUR DIVISIÓN DE DESARROLLO REGIONAL DEPARTAMENTO DE INGENIERÍAS FUNCIONAMIENTO DEL ALTERNADOR TEC: JUAN CARLOS SEDANO DE LA ROSA FUNCIONAMIENTO
CONTROL POR ORDENADOR A TRAVÉS DE CONTROLADORA. CONTROLADORA CASERA. Por: Pedro Ruiz
 CONTROL POR ORDENADOR A TRAVÉS DE CONTROLADORA. CONTROLADORA CASERA. Por: Pedro Ruiz CONTROLADORA CASERA Índice 1. Características y zonas de la controladora. 2. El puerto paralelo del ordenador. 3. Construcción
CONTROL POR ORDENADOR A TRAVÉS DE CONTROLADORA. CONTROLADORA CASERA. Por: Pedro Ruiz CONTROLADORA CASERA Índice 1. Características y zonas de la controladora. 2. El puerto paralelo del ordenador. 3. Construcción
PROBLEMA. Diseño de un DIMMER.
 PROBLEMA Diseño de un DIMMER. Solución, como las especificaciones vistas en clase fueron muy claras el DIMMER controlara la velocidad de los disparos que se harán en la compuerta de el tiristor, es decir
PROBLEMA Diseño de un DIMMER. Solución, como las especificaciones vistas en clase fueron muy claras el DIMMER controlara la velocidad de los disparos que se harán en la compuerta de el tiristor, es decir
Tutorial de Electrónica
 Tutorial de Electrónica Introducción Conseguir que la tensión de un circuito en la salida sea fija es uno de los objetivos más importantes para que un circuito funcione correctamente. Para lograrlo, se
Tutorial de Electrónica Introducción Conseguir que la tensión de un circuito en la salida sea fija es uno de los objetivos más importantes para que un circuito funcione correctamente. Para lograrlo, se
Competencia de Robótica R2-D2 2014
 Competencia de Robótica R2-D2 2014 Categoría: Velocista Nombre del Robot: Miyagui Institución: UTN-FRA Participantes: Calvo, Juan Ignacio Schuster, Mariela Medina, Sergio Daniel Índice 1. Introducción...
Competencia de Robótica R2-D2 2014 Categoría: Velocista Nombre del Robot: Miyagui Institución: UTN-FRA Participantes: Calvo, Juan Ignacio Schuster, Mariela Medina, Sergio Daniel Índice 1. Introducción...
Inversores De Frecuencia
 Inversores De Frecuencia QUÉ ES UN INVERSOR? Un inversor es un control para motores, que hace variar la velocidad a motores C.A. De inducción. Esta variación la logra variando la frecuencia de alimentación
Inversores De Frecuencia QUÉ ES UN INVERSOR? Un inversor es un control para motores, que hace variar la velocidad a motores C.A. De inducción. Esta variación la logra variando la frecuencia de alimentación
Sube Selector Canales. Canal. Baja. Tema 4: Bases Matemáticas II. 4.1 Sistemas con memoria o secuenciales. 4.1.1 Introducción.
 Bases Matemáticas II - ágina 1 de 11 Tema 4: Bases Matemáticas II. 4.1 Sistemas con memoria o secuenciales. 4.1.1 Introducción. Hasta ahora hemos tratados con dispositivos lógicos cuyas salidas dependían
Bases Matemáticas II - ágina 1 de 11 Tema 4: Bases Matemáticas II. 4.1 Sistemas con memoria o secuenciales. 4.1.1 Introducción. Hasta ahora hemos tratados con dispositivos lógicos cuyas salidas dependían
Farol de desvío en vías Märklin M en digital
 Railwaymania Farol de desvío en vías Märklin M en digital Farol de desvío en vías Märklin M en digital Alimentación directa desde la vía Muchos colegas conservan material antiguo procedente de las maquetas
Railwaymania Farol de desvío en vías Märklin M en digital Farol de desvío en vías Märklin M en digital Alimentación directa desde la vía Muchos colegas conservan material antiguo procedente de las maquetas
153 = 1x100 + 5x10 + 3x1
 ELECTRÓNICA DIGITAL Introducción Hemos visto hasta ahora algunos componentes muy utilizados en los circuitos de electrónica analógica. Esta tecnología se caracteriza porque las señales físicas (temperatura,
ELECTRÓNICA DIGITAL Introducción Hemos visto hasta ahora algunos componentes muy utilizados en los circuitos de electrónica analógica. Esta tecnología se caracteriza porque las señales físicas (temperatura,
TEMA ELECTRÓNICA 3º ESO TECNOLOGÍA
 3º ESO Tecnologías Tema Electrónica página 1 de 11 TEMA ELECTRÓNICA 3º ESO TECNOLOGÍA Índice de contenido 1 Electrónica...2 2 Pilas en los circuitos electrónicos...2 3 DIODO...2 4 LED (diodo emisor de
3º ESO Tecnologías Tema Electrónica página 1 de 11 TEMA ELECTRÓNICA 3º ESO TECNOLOGÍA Índice de contenido 1 Electrónica...2 2 Pilas en los circuitos electrónicos...2 3 DIODO...2 4 LED (diodo emisor de