PROYECTO FIN DE CARRERA INGENIERÍA INDUSTRIAL. EPS FERROL
|
|
|
- Irene Blanco Cáceres
- hace 8 años
- Vistas:
Transcripción
1 PROYECTO FIN DE CARRERA INGENIERÍA INDUSTRIAL. EPS FERROL SIMULADOR DE GRÚA PANAMAX PARA MOVIMIENTO DE CONTENEDORES EN PUERTO Autor: David Vilela Freire Tutor: Daniel Dopico Dopico Septiembre, 2011

2 Índice Introducción Dinámica de sistemas multicuerpo Software empleado Conclusiones Simulación 1/22

3 Motivación y objetivos Motivación Encargo de Azteca Consulting, S.L. al Cliente final: Fundación Puerto de Vigo Objetivo: simulación de grúa en tiempo real Formación operarios Selección de personal Asistencia en diseño 2/22

4 Simuladores: cada vez más interesantes Potencia aumenta cada día Gran ventaja competitiva: diferencias entre usar una grúa y usar un simulador Coste: asociado al uso de las instalaciones (horas máquina) Riesgo: asociado a los operarios inexpertos (accidentes) Transporte marítimo Cubre la gran mayoría de la mercancía mundial Importancia económica de puertos Antecedentes 3/22

5 Puerto de Singapur Puerto más activo del mundo Principal centro logístico de transportes 600 puertos conectados 13 km de muelles 150 grúas 30 millones de contenedores 1000 barcos simultáneos 25% mercancías del mundo 4/22

6 Portainer TMVP01 Peso Capacidad Elevación con carga 32 t Elevación en vacío Traslación carro Traslación pórtico Potencia Tensión 850 tm 40 tm 60 m/min 120 m/min 150 m/min 45 m/min 640 KW 440 V Alcance pluma lado mar 45 m Alcance pluma lado tierra 10 m Distancia entre carriles 15,24 m Ancho ente patas 18,4 m Ancho entre ejes 19,94 m Recorrido cabina 70,24 Recorrido estructura Altura total Altura bajo spreader Altura libre bajo viga portal 300 m 62 m 33 m 16,03 m 5/22

7 Dinámica de sistemas multicuerpo Sistema multicuerpo Sistema mecánico móvil o con partes móviles Mecanismo = Sólidos +Pares cinemáticos Dinámica de sistemas multicuerpo Simulación de sistemas multicuerpo a partir de la resolución de las ecuaciones del movimiento 6/22

8 Procedimiento Fase 1: Modelización Propiedades físicas y geométricas Situación espacial Topología del mecanismo Fase 2: Formulación Planteamiento y resolución de ecuaciones del movimiento Fase 3: Obtención de resultados 7/22

9 Geometría Geometría inicial: estimación de propiedades en fase inicial. Datos de catálogo Geometría detallada: fase final. Aportada por Azteca Consulting S.L. 8/22

10 Propiedades geométricas 9/22

11 Propiedades físicas Ejemplo de propiedades físicas de un sólido Spreader Masa (Kg) Centro de gravedad (mm) X Y Z Tensor de inercia XX YY ZZ XY XZ YZ /22

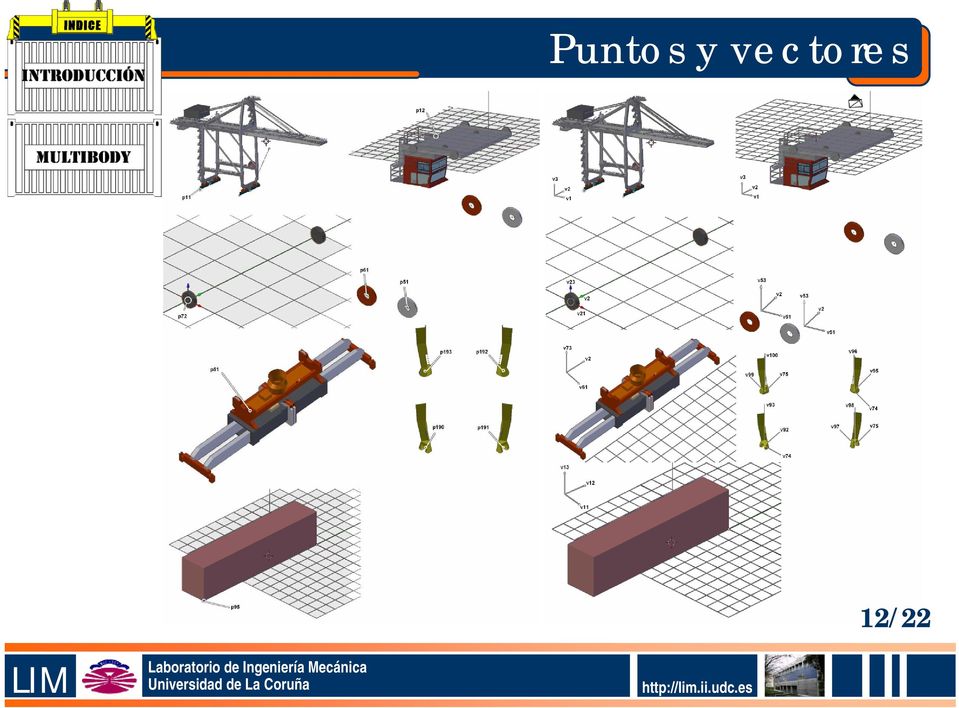
12 Situación espacial y topología Coordenadas: variables que definen al mecanismo Sistema mixto Naturales Puntos y vectores Definición sencilla Requieren experiencia Relativas Ángulos y distancias Ideal para simplificar la definición de actuadores Aumentan el tamaño del problema Términos de alto coste computacional 11/22

13 Puntos y vectores 12/22
14 Actuados Guiados por restricciones reónomas No actuados Guiados por la física del sistema Grados de libertad 13/22

15 Formulación Index 3 Augmented Lagrange (I3AL) [1] Mq ΦαΦ Φλ Q + t q + t q = i+ 1 n = i n + i+ 1 n λ λ αφ Integración con regla trapezoidal implícita de paso simple [1] Penalty, Semi-Recursive and Hybrid Methods for MBS Real-Time Dynamics in the Context of Structural Integrators J. Cuadrado, D. Dopico, M.A. Naya and M. Gonzalez Multibody System Dynamics, vol. 12, no. 2, pp , (Journal paper) 14/22

16 Formulación Solución del sistema no lineal por Newton Raphson ( ) f q Δ q = f q ( ) i+ 1 i q i ( ) 2 f q Δt Δt t = M+ C+ ( ΦαΦ q q + K) q Δt T T ( ) = 1 ( n+ n q + 1 n+ 1 q + 1 n+ 1 n+ 1) f q Mq + Mq ˆ + Φ αφ + Φ λ Q = 0 Proyecciones ortogonales en velocidad y aceleración 2 2 ( ) Δt Δt Δt t f q q * = M + C + K q ΦαΦ q q ( ) 4 n n 2 2 Δt Δt * Δt t f q q = M + C + K q Φα Φq Φ q q 4 t ( q t ) 15/22
 4 n n 2 2 Δt Δt * Δt t f q q = M + C + K + 2 4 q Φα Φq Φ q q 4 t ( q t )")
17 Software 16/22

18 MBSF90 Desarrollado por el Biblioteca de funciones para la dinámica de sistemas multicuerpo Planteamiento y resolución de las ecuaciones del movimiento 17/22

19 Simple DirectMedia Layer (SDL) Biblioteca que proporciona un acceso sencillo a audio, teclado, ratón, joystick, tarjeta gráfica Joystick Actuadores de la grúa Teclado y ratón Cámaras 18/22

20 Open Scene Graph (OSG) Comunicación entre la aplicación y el OpenGL, encargado del control de la tarjeta gráfica 19/22

21 Conclusiones Desarrollo de la parte física del simulador Maniobras de elevación y desplazamiento de la carga Realismo: maniobras similares a una grúa real Funcionamiento en tiempo real 20/22
22 Conclusiones Mejoras y trabajo futuro: Múltiples contenedores, caída de filas de contenedores, etc Spreader adaptable a contenedores de 20 pies Recogida y descarga de contenedores en camión Mejora del panel de mando Posibilidad de supervisión de maniobras Realización de prácticas guiadas Validación de parámetros 21/22
23 Simulación 22/22
24 PROYECTO FIN DE CARRERA INGENIERÍA INDUSTRIAL. EPS FERROL SIMULADOR DE GRÚA PANAMAX PARA MOVIMIENTO DE CONTENEDORES EN PUERTO Autor: David Vilela Freire Tutor: Daniel Dopico Dopico Septiembre, 2011
LIM. Simulador de grúa hidráulica para aplicaciones marinas. Proyecto de fin de carrera. Ingeniería Industrial.
 Proyecto de fin de carrera. Simulador de grúa hidráulica para aplicaciones marinas. Ingeniería Industrial. Autor: Pedro Cobo Beltrán Tutor: Daniel Dopico Dopico Enero, 2011 Índice Grúa real Dinámica de
Proyecto de fin de carrera. Simulador de grúa hidráulica para aplicaciones marinas. Ingeniería Industrial. Autor: Pedro Cobo Beltrán Tutor: Daniel Dopico Dopico Enero, 2011 Índice Grúa real Dinámica de
SIMULADOR DE CARRETILLA ELEVADORA
 Trabajo fin de Grado SIMULADOR DE CARRETILLA ELEVADORA Autor: Javier Marcote Vázquez Tutores: Daniel Dopico Dopico Alberto Luaces Fernández Julio, 2017 LIM Índice Introducción Software empleado Dinámica
Trabajo fin de Grado SIMULADOR DE CARRETILLA ELEVADORA Autor: Javier Marcote Vázquez Tutores: Daniel Dopico Dopico Alberto Luaces Fernández Julio, 2017 LIM Índice Introducción Software empleado Dinámica
LIM. Técnicas. Proyecto de fin de carrera. Ingeniería Industrial. Autor: Emilio Sanjurjo Maroño Tutores: Daniel Dopico Dopico Roland Pastorino
 Proyecto de fin de carrera Modelo Multicuerpo de Automóvil para su Aplicación en Técnicas de Estimación de Estados Ingeniería Industrial Autor: Emilio Sanjurjo Maroño Tutores: Daniel Dopico Dopico Roland
Proyecto de fin de carrera Modelo Multicuerpo de Automóvil para su Aplicación en Técnicas de Estimación de Estados Ingeniería Industrial Autor: Emilio Sanjurjo Maroño Tutores: Daniel Dopico Dopico Roland
Las conexiones conectan cuerpos entre sí formando un mecanismo En el ejemplo, cada cuerpo, en este caso las distintas secciones de la pala mecánica,
 1 2 Las conexiones conectan cuerpos entre sí formando un mecanismo En el ejemplo, cada cuerpo, en este caso las distintas secciones de la pala mecánica, es representado por su centro de gravedad, en el
1 2 Las conexiones conectan cuerpos entre sí formando un mecanismo En el ejemplo, cada cuerpo, en este caso las distintas secciones de la pala mecánica, es representado por su centro de gravedad, en el
UN ENTORNO A MEDIDA PARA EL DISEÑO Y LA SIMULACIÓN DE MAQUINARIA POR COMPUTADOR
 UN ENTORNO A MEDIDA PARA EL DISEÑO Y LA SIMULACIÓN DE MAQUINARIA POR COMPUTADOR Manuel González y Javier Cuadrado Departamento de Ingeniería Industrial II, Campus de Esteiro, 15403 Ferrol Universidad de
UN ENTORNO A MEDIDA PARA EL DISEÑO Y LA SIMULACIÓN DE MAQUINARIA POR COMPUTADOR Manuel González y Javier Cuadrado Departamento de Ingeniería Industrial II, Campus de Esteiro, 15403 Ferrol Universidad de
LIM. Modelado 3D del sistema de fondeo de un barco para la fabricación de maquetas y simulación dinámica con el software SIMULANCLA
 Trabajo fin de Grado Modelado 3D del sistema de fondeo de un barco para la fabricación de maquetas y simulación dinámica con el software SIMULANCLA Autor: Diego Saya Carro Tutor: Daniel Dopico Dopico Ana
Trabajo fin de Grado Modelado 3D del sistema de fondeo de un barco para la fabricación de maquetas y simulación dinámica con el software SIMULANCLA Autor: Diego Saya Carro Tutor: Daniel Dopico Dopico Ana
Sistemas de manipulación
 Sistemas de manipulación Usted necesita sistemas eficientes. Usted quiere minimizar sus costes. Nosotros le ofrecemos soluciones a medida. Sistemas de manipulación de Festo: versátiles, a medida, rentables.
Sistemas de manipulación Usted necesita sistemas eficientes. Usted quiere minimizar sus costes. Nosotros le ofrecemos soluciones a medida. Sistemas de manipulación de Festo: versátiles, a medida, rentables.
GRÚA PÓRTICO PARA EL TRANSBORDO DE CONTENEDORES EN TERMINALES TRIMODALES Y PUERTOS SECOS
 terminal server GRÚA PÓRTICO PARA EL TRANSBORDO DE CONTENEDORES EN TERMINALES TRIMODALES Y PUERTOS SECOS TERMINAL SERVER INFORMACIÓN Una grúa consistente y fiable una solución económica para todo tipo
terminal server GRÚA PÓRTICO PARA EL TRANSBORDO DE CONTENEDORES EN TERMINALES TRIMODALES Y PUERTOS SECOS TERMINAL SERVER INFORMACIÓN Una grúa consistente y fiable una solución económica para todo tipo
LA TECNOLOGÍA TALGO Y SUS ÚLTIMOS PRODUCTOS.
 Ferroviaria '98 373 LA TECNOLOGÍA TALGO Y SUS ÚLTIMOS PRODUCTOS. Carlos Cereceda Director de Marketing - Patentes Talgo, S.A. C/ Montalbán, 14. 28014 Madrid Tfno: 91 595 JO 00; Fax: 91 522 83 47. 91 552
Ferroviaria '98 373 LA TECNOLOGÍA TALGO Y SUS ÚLTIMOS PRODUCTOS. Carlos Cereceda Director de Marketing - Patentes Talgo, S.A. C/ Montalbán, 14. 28014 Madrid Tfno: 91 595 JO 00; Fax: 91 522 83 47. 91 552
DESARROLLO DE SOFTWARE MODULAR, ABIERTO Y COLABORATIVO PARA SIMULACIÓN DE MÁQUINAS Y MECANISMOS
 UNIVERSIDADE DA CORUÑA Escola Politécnica Superior. Ferrol. INGENIERÍA INDUSTRIAL DESARROLLO DE SOFTWARE MODULAR, ABIERTO Y COLABORATIVO PARA SIMULACIÓN DE MÁQUINAS Y MECANISMOS Autor: Tutor: Miguel Álvarez
UNIVERSIDADE DA CORUÑA Escola Politécnica Superior. Ferrol. INGENIERÍA INDUSTRIAL DESARROLLO DE SOFTWARE MODULAR, ABIERTO Y COLABORATIVO PARA SIMULACIÓN DE MÁQUINAS Y MECANISMOS Autor: Tutor: Miguel Álvarez
Examen de TEORIA DE MAQUINAS Junio 95 Nombre...
 Examen de TEORIA DE MAQUINAS Junio 95 Nombre... El sistema de la figura es un modelo simplificado de un vehículo y se encuentra sometido a la acción de la gravedad. Sus características son: masa m=10 Kg,
Examen de TEORIA DE MAQUINAS Junio 95 Nombre... El sistema de la figura es un modelo simplificado de un vehículo y se encuentra sometido a la acción de la gravedad. Sus características son: masa m=10 Kg,
Grúas pórtico ligero PG REID
 Grúas pórtico ligero Ref. Capacidad de carga: 500 a 5000 kg. Es un pórtico ligero portátil que puede elevar hasta 5 t de carga con seguridad. El sistema de montaje es muy sencillo, se puede montar manualmente
Grúas pórtico ligero Ref. Capacidad de carga: 500 a 5000 kg. Es un pórtico ligero portátil que puede elevar hasta 5 t de carga con seguridad. El sistema de montaje es muy sencillo, se puede montar manualmente
ESTANTERIAS DE PALETIZACION CONVENCIONAL
 ESTANTERIAS DE PALETIZACION CONVENCIONAL TABLA DE CARGAS Y MEDIDAS 1 Elección del fondo del bastidor La elección del fondo del bastidor depende del fondo de la paleta y del tipo que ha de utilizarse. Las
ESTANTERIAS DE PALETIZACION CONVENCIONAL TABLA DE CARGAS Y MEDIDAS 1 Elección del fondo del bastidor La elección del fondo del bastidor depende del fondo de la paleta y del tipo que ha de utilizarse. Las
SISTEMAS DE AUTOMATIZACIÓN DE CARGA CÓMO CARGAR UN CAMIÓN O UN CONTENEDOR EN 5 MINUTOS?
 SISTEMAS DE AUTOMATIZACIÓN DE CARGA CÓMO CARGAR UN CAMIÓN O UN CONTENEDOR EN 5 MINUTOS? www.progecovigo.com 1 MODELOS DE PLATAFORMAS PLATAFORMAS VARIABLES PF-V CON REGULACIÓN EN ALTURA DISEÑADAS PARA LA
SISTEMAS DE AUTOMATIZACIÓN DE CARGA CÓMO CARGAR UN CAMIÓN O UN CONTENEDOR EN 5 MINUTOS? www.progecovigo.com 1 MODELOS DE PLATAFORMAS PLATAFORMAS VARIABLES PF-V CON REGULACIÓN EN ALTURA DISEÑADAS PARA LA
ALINEADOR DE DIRECCIONES PARA TURISMOS INALAMBRICO (Wireless Zigbee)
") ALINEADOR DE DIRECCIONES PARA TURISMOS INALAMBRICO (Wireless Zigbee) Certificate of Conformity CTE11FC-221E Attestation of Conformity CTE11FC-222E Pág. 1/5 DESCRIPCION Rango Flex CCD es un alineador de
ALINEADOR DE DIRECCIONES PARA TURISMOS INALAMBRICO (Wireless Zigbee) Certificate of Conformity CTE11FC-221E Attestation of Conformity CTE11FC-222E Pág. 1/5 DESCRIPCION Rango Flex CCD es un alineador de
Comparación entre motores rotativos con sinfín y corona, frente a motores lineales en un prototipo industrial
 Comparación entre motores rotativos con sinfín y corona, frente a motores lineales en un prototipo industrial Ing. Marcelo Castelli Lémez Departamento de Ingeniería Eléctrica, Electrónica y Automática
Comparación entre motores rotativos con sinfín y corona, frente a motores lineales en un prototipo industrial Ing. Marcelo Castelli Lémez Departamento de Ingeniería Eléctrica, Electrónica y Automática
Física I. Carrera: ECM-0418 3-2-8
 1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría-horas práctica-créditos Física I Ingeniería Electrónica. ECM-0418 3-2-8 2.- HISTORIA DEL PROGRAMA Lugar
1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría-horas práctica-créditos Física I Ingeniería Electrónica. ECM-0418 3-2-8 2.- HISTORIA DEL PROGRAMA Lugar
1º Tema.- Conceptos y definiciones en cinemática.
 Universidad de Huelva ESCUELA POLITECNICA SUPERIOR Departamento de Ingeniería Minera, Mecánica y Energética Asignatura: Ingeniería de Máquinas [570004027] 5º curso de Ingenieros Industriales 1º Tema.-
Universidad de Huelva ESCUELA POLITECNICA SUPERIOR Departamento de Ingeniería Minera, Mecánica y Energética Asignatura: Ingeniería de Máquinas [570004027] 5º curso de Ingenieros Industriales 1º Tema.-
Trabajo Fin de Grado. Modelización y simulación de un cambio de buje mediante técnicas dinámicas multicuerpo con contacto
 Trabajo Fin de Grado Modelización y simulación de un cambio de buje mediante técnicas dinámicas multicuerpo con contacto Autor: Diego Maceira Muíños Tutores: Daniel Dopico Dopico Emilio Sanjurjo Maroño
Trabajo Fin de Grado Modelización y simulación de un cambio de buje mediante técnicas dinámicas multicuerpo con contacto Autor: Diego Maceira Muíños Tutores: Daniel Dopico Dopico Emilio Sanjurjo Maroño
UNIVERSIDADE DA CORUÑA
 UNIVERSIDADE DA CORUÑA E.T.S.I CAMINOS, CANALES Y PUERTOS GUIA DOCENTE DE LA ASIGNATURA: MECANICA CURSO ACADÉMICO: 2009/2010 UNIVERSIDADE DA CORUÑA E.T.S.I CAMINOS, CANALES Y PUERTOS DATOS DE LA ASIGNATURA
UNIVERSIDADE DA CORUÑA E.T.S.I CAMINOS, CANALES Y PUERTOS GUIA DOCENTE DE LA ASIGNATURA: MECANICA CURSO ACADÉMICO: 2009/2010 UNIVERSIDADE DA CORUÑA E.T.S.I CAMINOS, CANALES Y PUERTOS DATOS DE LA ASIGNATURA
Analizar, diseñar, calcular y seleccionar diferentes mecanismos involucrados en la transmisión de movimiento de máquinas.
 Nombre de la asignatura: Mecanismos Aportación al perfil Analizar, diseñar, calcular y seleccionar diferentes mecanismos involucrados en la transmisión de movimiento de máquinas. Objetivo de aprendizaje
Nombre de la asignatura: Mecanismos Aportación al perfil Analizar, diseñar, calcular y seleccionar diferentes mecanismos involucrados en la transmisión de movimiento de máquinas. Objetivo de aprendizaje
1. Introducción LIM 2. Casos implementación:
 Trabajo fin de Grado Implementación de un software de optimización de dinámica de sistemas mecánicos. Aplicación a la optimización de un vehículo Autor: Marta Frade Manso Tutor: Daniel Dopico Dopico Diciembre,
Trabajo fin de Grado Implementación de un software de optimización de dinámica de sistemas mecánicos. Aplicación a la optimización de un vehículo Autor: Marta Frade Manso Tutor: Daniel Dopico Dopico Diciembre,
Talgo 250. Talgo 250
 Talgo 250 Talgo 250 CARACTERÍSTICAS GENERALES Velocidad comercial máxima 250 km/h Aceleración lateral máxima en curva 1.2 m/s 2 Ancho de vía 1435 mm / 1668 mm Tracción Eléctrica Cabezas motrices 2 Coches
Talgo 250 Talgo 250 CARACTERÍSTICAS GENERALES Velocidad comercial máxima 250 km/h Aceleración lateral máxima en curva 1.2 m/s 2 Ancho de vía 1435 mm / 1668 mm Tracción Eléctrica Cabezas motrices 2 Coches
ORGANIZACIÓN DE LA MATERIA DE MECÁNICA PARA EL ÁREA QUÍMICO- BILÓGICAS
 ORGANIZACIÓN DE LA MATERIA DE MECÁNICA PARA EL ÁREA QUÍMICO- BILÓGICAS TEMARIO A. CANTIDADES ESCALARES Y VECTORIALES L ESCALARES Y VECTORES. 1. Presentación e introducción a la materia. 2. Sistemas de
ORGANIZACIÓN DE LA MATERIA DE MECÁNICA PARA EL ÁREA QUÍMICO- BILÓGICAS TEMARIO A. CANTIDADES ESCALARES Y VECTORIALES L ESCALARES Y VECTORES. 1. Presentación e introducción a la materia. 2. Sistemas de
Generamos Propuestas de diseño, ingeniería, manufactura, instalación, capacitación, y post-venta de la mas alta calidad
 WWW.BESTIL.COM.MX Somos una empresa especialista en Proyectos Llave en Mano para el diseño, construcción, equipamiento y puesta a punto de Centros de Distribución, Almacenes y Puntos de Venta desde un
WWW.BESTIL.COM.MX Somos una empresa especialista en Proyectos Llave en Mano para el diseño, construcción, equipamiento y puesta a punto de Centros de Distribución, Almacenes y Puntos de Venta desde un
Realization of a virtual environment for soft-real-time simulator with human interaction.
 PROYECTO FIN DE CARRERA INGENIERÍA INDUSTRIAL Realization of a virtual environment for soft-real-time simulator with human interaction. Autor: Tutor: Raquel Graña Lamas Miguel Ángel Naya Villaverde Daniel
PROYECTO FIN DE CARRERA INGENIERÍA INDUSTRIAL Realization of a virtual environment for soft-real-time simulator with human interaction. Autor: Tutor: Raquel Graña Lamas Miguel Ángel Naya Villaverde Daniel
Torno automático CNC para cilindrar. Torno automático CNC para piezas cortas TNL18
 Torno automático CNC para cilindrar Torno automático CNC para piezas cortas TNL18 La excelente tecnología del torno automático TRAUB TNL18 CNC para cilindrar/ para piezas cortas ofrece significantes ventajas
Torno automático CNC para cilindrar Torno automático CNC para piezas cortas TNL18 La excelente tecnología del torno automático TRAUB TNL18 CNC para cilindrar/ para piezas cortas ofrece significantes ventajas
7º CONGRESO IBEROAMERICANO DE INGENIERIA MECANICA 7º CONGRESSO IBEROAMERICANO DE ENGENHARIA MECANICA México D.F., 12 al 14 de Octubre de 2005
 7º CONGRESO IBEROAMERICANO DE INGENIERIA MECANICA 7º CONGRESSO IBEROAMERICANO DE ENGENHARIA MECANICA México D.F., 12 al 14 de Octubre de 2005 SIMULADOR DE CARRETILLAS ELEVADORAS PARA LA FORMACIÓN Y DISMINUCIÓN
7º CONGRESO IBEROAMERICANO DE INGENIERIA MECANICA 7º CONGRESSO IBEROAMERICANO DE ENGENHARIA MECANICA México D.F., 12 al 14 de Octubre de 2005 SIMULADOR DE CARRETILLAS ELEVADORAS PARA LA FORMACIÓN Y DISMINUCIÓN
Vectores en el espacio
 Vectores en el espacio Un sistema de coordenadas tridimensional se construye trazando un eje Z, perpendicular en el origen de coordenadas a los ejes X e Y. Cada punto viene determinado por tres coordenadas
Vectores en el espacio Un sistema de coordenadas tridimensional se construye trazando un eje Z, perpendicular en el origen de coordenadas a los ejes X e Y. Cada punto viene determinado por tres coordenadas
Física I. Carrera: INM-0401. Participantes Representante de las academias de ingeniería industrial de Institutos Tecnológicos.
 1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría-horas práctica-créditos Física I Ingeniería Industrial INM-0401 3 2 8 2.- HISTORIA DEL PROGRAMA Lugar y
1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría-horas práctica-créditos Física I Ingeniería Industrial INM-0401 3 2 8 2.- HISTORIA DEL PROGRAMA Lugar y
Libro blanco Sistemas de manipulación cartesiana: comparación técnica con robots clásicos
 Libro blanco Sistemas de manipulación : comparación técnica con robots clásicos Por qué merece la pena utilizar sistemas de manipulación? La tendencia en las soluciones clásicas de montaje y manipulación
Libro blanco Sistemas de manipulación : comparación técnica con robots clásicos Por qué merece la pena utilizar sistemas de manipulación? La tendencia en las soluciones clásicas de montaje y manipulación
DESCRIPCIÓN DEL RESULTADO DE INVESTIGACIÓN
 REF.: BIO_UAH_11 SECTOR INDUSTRIAL INVESTIGADOR DEPARTAMENTO DATOS DE CONTACTO PÁGINA WEB Ciencias de la Salud Saturnino Maldonado Bascón Teoría de la Señal y Comunicaciones + 34 91 885 66 94 + 34 91 885
REF.: BIO_UAH_11 SECTOR INDUSTRIAL INVESTIGADOR DEPARTAMENTO DATOS DE CONTACTO PÁGINA WEB Ciencias de la Salud Saturnino Maldonado Bascón Teoría de la Señal y Comunicaciones + 34 91 885 66 94 + 34 91 885
E[M]CONOMÍA] significa: Potencia y flexibilidad. CONCEPT TURN 250. Formación CNC con rendimiento industrial
![E[M]CONOMÍA] significa: Potencia y flexibilidad. CONCEPT TURN 250. Formación CNC con rendimiento industrial](/thumbs/20/417433.jpg "E[M]CONOMÍA] significa: Potencia y flexibilidad. CONCEPT TURN 250. Formación CNC con rendimiento industrial") [ E[M]CONOMÍA] significa: Potencia y flexibilidad. CONCEPT TURN 250 Formación CNC con rendimiento industrial Concept TURN 250 Calidad a ultranza hasta el último tornillo a un precio sin competencia. Con
[ E[M]CONOMÍA] significa: Potencia y flexibilidad. CONCEPT TURN 250 Formación CNC con rendimiento industrial Concept TURN 250 Calidad a ultranza hasta el último tornillo a un precio sin competencia. Con
INTRODUCCIÓN AL TRANSPORTE
 Departamento de Ingeniería Mecánica Universidad Carlos III de Madrid TRANSPORTES DEFINICIÓN DE TRANSPORTE Parte de la actividad económica que tiene por objeto la satisfacción de las necesidades humanas
Departamento de Ingeniería Mecánica Universidad Carlos III de Madrid TRANSPORTES DEFINICIÓN DE TRANSPORTE Parte de la actividad económica que tiene por objeto la satisfacción de las necesidades humanas
Elba La silla salvaescalera robusta, práctica y segura
 Movilidad Doméstica Desplazarse en la propia casa con plena independencia Elba La silla salvaescalera robusta, práctica y segura Ischia La silla salvaescalera de diseño único Elba Servoescalera con asiento,
Movilidad Doméstica Desplazarse en la propia casa con plena independencia Elba La silla salvaescalera robusta, práctica y segura Ischia La silla salvaescalera de diseño único Elba Servoescalera con asiento,
Gn-SaTÉlITES AUMENTE SU MANIOBRABILIDAD CON UN GN-SATÉLITE
 Gn-SaTÉlITES AUMENTE SU MANIOBRABILIDAD CON UN GN-SATÉLITE Gn-SaTÉlITES La solución perfecta para las calles estrechas en el centro de la ciudad. Amplia gama de productos para vehículos pequeños de 1,8tn.
Gn-SaTÉlITES AUMENTE SU MANIOBRABILIDAD CON UN GN-SATÉLITE Gn-SaTÉlITES La solución perfecta para las calles estrechas en el centro de la ciudad. Amplia gama de productos para vehículos pequeños de 1,8tn.
Dynamic parameter identification of parallel robots starting from the measurement of joints position and forces
 Rev. Téc. Ing. Univ. Zulia. Vol. 32, Nº 2, 42-51, 2009 Dynamic parameter identification of parallel robots starting from the measurement of joints position and forces Miguel Díaz-Rodríguez 1, Vicente Mata
Rev. Téc. Ing. Univ. Zulia. Vol. 32, Nº 2, 42-51, 2009 Dynamic parameter identification of parallel robots starting from the measurement of joints position and forces Miguel Díaz-Rodríguez 1, Vicente Mata
CATÁLOGO EQUIPOS DE LEVANTE
 CATÁLOGO EQUIPOS DE LEVANTE LA EMPRESA SARGENT es una empresa chilena fundada en 1925, dedicada a la comercialización de maquinarias y equipos para la industria, minería y agricultura. La componen un
CATÁLOGO EQUIPOS DE LEVANTE LA EMPRESA SARGENT es una empresa chilena fundada en 1925, dedicada a la comercialización de maquinarias y equipos para la industria, minería y agricultura. La componen un
Examen de TEORIA DE MAQUINAS Junio 94 Nombre...
 Examen de TEORIA DE MAQUINAS Junio 94 Nombre... El robot plano de la figura transporta en su extremo una masa puntual de magnitud 5M a velocidad constante horizontal de valor v. Cada brazo del robot tiene
Examen de TEORIA DE MAQUINAS Junio 94 Nombre... El robot plano de la figura transporta en su extremo una masa puntual de magnitud 5M a velocidad constante horizontal de valor v. Cada brazo del robot tiene
CATALOGO TRANSPORTADORES CINTAS
 CATALOGO TRANSPORTADORES CINTAS www.maskepack.com www.pdvnhsdfn FRP www.maskepack.com CINTAS TRANSPORTADORAS DE BANDA TKB-03... TKB-06... TKBM-06... TKB-06/03... TKB-06-MT... TKB-10... TKBM-10... TKB-15...
CATALOGO TRANSPORTADORES CINTAS www.maskepack.com www.pdvnhsdfn FRP www.maskepack.com CINTAS TRANSPORTADORAS DE BANDA TKB-03... TKB-06... TKBM-06... TKB-06/03... TKB-06-MT... TKB-10... TKBM-10... TKB-15...
Ficha técnica CAMA mod. MARINA-MARINA PLUS (ed. 12/2013) Cama articulada eléctrica de 4 planos y 3 articulaciones (90x196 planchas de PPC)
 Cama articulada eléctrica de 4 planos y 3 articulaciones (90x196 planchas de PPC)") Licencia de fabricación de Producto Sanitario Nº 5867-PS TECNIMOEM 97, S.L. Ctra. Logroño-Mendavia, km. 5 31230 VIANA (NAVARRA) ESPAÑA Tel.: + 34-948-646-213 Fax: + 34-948-646-380 E mail: tecnimoem@tecnimoem.com
Licencia de fabricación de Producto Sanitario Nº 5867-PS TECNIMOEM 97, S.L. Ctra. Logroño-Mendavia, km. 5 31230 VIANA (NAVARRA) ESPAÑA Tel.: + 34-948-646-213 Fax: + 34-948-646-380 E mail: tecnimoem@tecnimoem.com
MECÁNICA APLICADA CURSO 2005-2006 PROGRAMA DE LA ASIGNATURA NORMAS DE EVALUACIÓN BIBLIOGRAFÍA
 MECÁNICA APLICADA CURSO 2005-2006 PROGRAMA DE LA ASIGNATURA NORMAS DE EVALUACIÓN BIBLIOGRAFÍA Mecánica Aplicada 1/8 MECANICA APLICADA CURSO 2005-2006 Programa de la asignatura. 1. CALCULO VECTORIAL I.
MECÁNICA APLICADA CURSO 2005-2006 PROGRAMA DE LA ASIGNATURA NORMAS DE EVALUACIÓN BIBLIOGRAFÍA Mecánica Aplicada 1/8 MECANICA APLICADA CURSO 2005-2006 Programa de la asignatura. 1. CALCULO VECTORIAL I.
Centro de reafilado CNC Modelo UW I F
 Centro de reafilado CNC Modelo UW I F con 5 ejes controlados NC Intercambiador de muelas totalmente automático y Cargador automático de piezas La precisión de SAACKE en formato compacto La más moderna
Centro de reafilado CNC Modelo UW I F con 5 ejes controlados NC Intercambiador de muelas totalmente automático y Cargador automático de piezas La precisión de SAACKE en formato compacto La más moderna
Muelles de carga. Rampa móvil
 Muelles de carga La rampa resuelve con eficacia la falta de muelle de carga. Con la rampa se establece la necesaria continuidad entre la superfície propia y la del camión, container y vagón. Entonces es
Muelles de carga La rampa resuelve con eficacia la falta de muelle de carga. Con la rampa se establece la necesaria continuidad entre la superfície propia y la del camión, container y vagón. Entonces es
Ascensor Neumático PVE52 (3 personas - Silla de Ruedas)
") Ascensor Neumático PVE52 (3 personas - Silla de Ruedas) Ascensor Neumático PVE52 (1316) 3 personas - Silla de Ruedas PVE52 (1316) Dossier Informativo ESPECIFICACIONES TÉCNICAS Generales Diámetro exterior
Ascensor Neumático PVE52 (3 personas - Silla de Ruedas) Ascensor Neumático PVE52 (1316) 3 personas - Silla de Ruedas PVE52 (1316) Dossier Informativo ESPECIFICACIONES TÉCNICAS Generales Diámetro exterior
TR02. Guía y porta cables Series, 28, 30 y 41 División aparamenta baja tensión
 www. epromsa.com 02 TR02 Guía y porta cables Series, 28, 30 y 4 División aparamenta baja tensión 2 Guía y porta cables Índice Series 28-30 - 4 EQUIPOS DE TECNOCONTROL El sistema de líneas de Guías y porta
www. epromsa.com 02 TR02 Guía y porta cables Series, 28, 30 y 4 División aparamenta baja tensión 2 Guía y porta cables Índice Series 28-30 - 4 EQUIPOS DE TECNOCONTROL El sistema de líneas de Guías y porta
Sistemas de dirección, suspensión y frenado. 240 ETSEIB Escuela Técnica Superior de Ingeniería Industrial de
 Nombre asignatura: Código: Sistemas de dirección, suspensión y frenado 240AU024 Créditos ECTS: 6 Idioma de impartición: Catalán Unidad responsable: Barcelona Departamento: 240 ETSEIB Escuela Técnica Superior
Nombre asignatura: Código: Sistemas de dirección, suspensión y frenado 240AU024 Créditos ECTS: 6 Idioma de impartición: Catalán Unidad responsable: Barcelona Departamento: 240 ETSEIB Escuela Técnica Superior
N U E V A S P L A T A F O R M A S D E C O R T E P L E G A B L E S P A R A C E R E A L E S
 N U E V A S P L A T A F O R M A S D E C O R T E P L E G A B L E S P A R A C E R E A L E S PEQUEÑOS EN LA CARRETERA, GRANDES EN EL TRABA JO N U E V A S P L A T A F O R M A S D E C O R T E P L E G A B L
N U E V A S P L A T A F O R M A S D E C O R T E P L E G A B L E S P A R A C E R E A L E S PEQUEÑOS EN LA CARRETERA, GRANDES EN EL TRABA JO N U E V A S P L A T A F O R M A S D E C O R T E P L E G A B L
TEMA 9. Equipos de metrología dimensional: Máquinas medidoras por coordenadas.
 INTRODUCCIÓN A LA METROLOGÍA Curso Académico 2011-12 12 Rafael Muñoz Bueno Laboratorio de Metrología y Metrotecnia LMM-ETSII-UPM TEMA 9. Equipos de metrología dimensional: Máquinas medidoras por coordenadas.
INTRODUCCIÓN A LA METROLOGÍA Curso Académico 2011-12 12 Rafael Muñoz Bueno Laboratorio de Metrología y Metrotecnia LMM-ETSII-UPM TEMA 9. Equipos de metrología dimensional: Máquinas medidoras por coordenadas.
Sierras de paneles horizontales
 CUT 82 CUT 85 INDUSTRY CUT 110 INDUSTRY Sierras de paneles horizontales CUT 85 INDUSTRY CUT 110 INDUSTRY Serrado con la máxima potencia Su socio para la productividad y la precisión Spezialmaschinen CUT
CUT 82 CUT 85 INDUSTRY CUT 110 INDUSTRY Sierras de paneles horizontales CUT 85 INDUSTRY CUT 110 INDUSTRY Serrado con la máxima potencia Su socio para la productividad y la precisión Spezialmaschinen CUT
Catálogo técnico Sistemas de brazo soporte
 Catálogo técnico Sistemas de brazo soporte 2 Diferentes ángulos de visión de la máquina, personal con distintas alturas, trabajo sentado o de pie - con los sistemas de brazo soporte de Rittal se crea una
Catálogo técnico Sistemas de brazo soporte 2 Diferentes ángulos de visión de la máquina, personal con distintas alturas, trabajo sentado o de pie - con los sistemas de brazo soporte de Rittal se crea una
Estudio de la implementacion de sistemas de velocidad variable en la vía C-31N de acceso a la ciudad de Barcelona
 Asociación Española de Ingeniería Mecánica XIX CONGRESO NACIONAL DE INGENIERÍA MECÁNICA Estudio de la implementacion de sistemas de velocidad variable en la vía C-31N de acceso a la ciudad de Barcelona
Asociación Española de Ingeniería Mecánica XIX CONGRESO NACIONAL DE INGENIERÍA MECÁNICA Estudio de la implementacion de sistemas de velocidad variable en la vía C-31N de acceso a la ciudad de Barcelona
CONSEJERÍA DE EDUCACIÓN
 ANEXO VII (continuación) CONTENIDOS DE LA PARTE ESPECÍFICA DE LA PRUEBA DE ACCESO A CICLOS FORMATIVOS DE GRADO SUPERIOR PARTE ESPECÍFICA OPCIÓN B EJERCICIO DE TECNOLOGÍA INDUSTRIAL 1. RECURSOS ENERGÉTICOS.
ANEXO VII (continuación) CONTENIDOS DE LA PARTE ESPECÍFICA DE LA PRUEBA DE ACCESO A CICLOS FORMATIVOS DE GRADO SUPERIOR PARTE ESPECÍFICA OPCIÓN B EJERCICIO DE TECNOLOGÍA INDUSTRIAL 1. RECURSOS ENERGÉTICOS.
VII. ELEVADORES. VII.1. Generalidades
 VII.1. Generalidades Los elevadores son medios mecánicos de trasporte vertical de personas y mercancías; éstos, por sus características, se determinan con base en las horas de máxima afluencia. Los elevadores
VII.1. Generalidades Los elevadores son medios mecánicos de trasporte vertical de personas y mercancías; éstos, por sus características, se determinan con base en las horas de máxima afluencia. Los elevadores
SILLA SALVAESCALERAS CASADO 100 C FLOW 2
 SILLA SALVAESCALERAS CASADO 100 C FLOW 2 SOLUCIONES DE MOVILIDAD DESCRIPCIÓN La Silla Salvaescaleras Casado 100 C - Flow 2le permite subir y bajar de forma cómoda y segura. Se puede instalar en casi todas
SILLA SALVAESCALERAS CASADO 100 C FLOW 2 SOLUCIONES DE MOVILIDAD DESCRIPCIÓN La Silla Salvaescaleras Casado 100 C - Flow 2le permite subir y bajar de forma cómoda y segura. Se puede instalar en casi todas
LOGISTICA TECNOLOGIA E IMPLEMENTACION
 Rack Selectivo Características del Rack Selectivo: La ventaja más notable del Rack Selectivo es su sencilla forma de distribución, ya que ser adaptados a cualquier tipo de carga a almacenar por cantidad
Rack Selectivo Características del Rack Selectivo: La ventaja más notable del Rack Selectivo es su sencilla forma de distribución, ya que ser adaptados a cualquier tipo de carga a almacenar por cantidad
Talgo XXI. La fiabilidad de la experiencia
 Talgo XXI La fiabilidad de la experiencia UNA NUEVA GENERACIÓN DE TRENES TALGO DE ALTA VELOCIDAD XXI... CON TRACCIÓN INCORPORADA EN LOS VEHÍCULOS DE CABEZA Y COLA... Y EJES DE ANCHO VARIABLE En su avanzado
Talgo XXI La fiabilidad de la experiencia UNA NUEVA GENERACIÓN DE TRENES TALGO DE ALTA VELOCIDAD XXI... CON TRACCIÓN INCORPORADA EN LOS VEHÍCULOS DE CABEZA Y COLA... Y EJES DE ANCHO VARIABLE En su avanzado
FORMACIÓN CONTINUA IPONE AND IPAD GAME DEVELOPER
 CURSO IPONE AND IPAD GAME DEVELOPER CODIGO AREA COSTE 1.620,00 NÚMERO DE HORAS 300 h MODALIDAD Presencia Mixta Distancia On line X OBJETIVOS DEL CURSO iphone Game Developer ofrece la oportunidad a pymes
CURSO IPONE AND IPAD GAME DEVELOPER CODIGO AREA COSTE 1.620,00 NÚMERO DE HORAS 300 h MODALIDAD Presencia Mixta Distancia On line X OBJETIVOS DEL CURSO iphone Game Developer ofrece la oportunidad a pymes
UNIVERSIDAD DE COSTA RICA FACULTAD DE CIENCIAS ESCUELA DE FISICA PROGRAMA
 UNIVERSIDAD DE COSTA RICA FACULTAD DE CIENCIAS ESCUELA DE FISICA PROGRAMA FS0210 FISICA GENERAL I Créditos: 3 Requisitos: MA-1001 Cálculo I Correquisito: FS0211 Laboratorio de Física General I Número de
UNIVERSIDAD DE COSTA RICA FACULTAD DE CIENCIAS ESCUELA DE FISICA PROGRAMA FS0210 FISICA GENERAL I Créditos: 3 Requisitos: MA-1001 Cálculo I Correquisito: FS0211 Laboratorio de Física General I Número de
El planificador de trabajo LICCON para grúas móviles y sobre cadenas
 El planificador de trabajo LICCON para grúas móviles y sobre cadenas 1 capacidades de carga sustituye al manual de tablas. En este apartado pueden seleccionarse los estados de equipamiento programados
El planificador de trabajo LICCON para grúas móviles y sobre cadenas 1 capacidades de carga sustituye al manual de tablas. En este apartado pueden seleccionarse los estados de equipamiento programados
Máquinas CNC - Categorías Oficial Múltiple Superior y Oficial Múltiple. Conceptos técnicos involucrados. Acuerdo del 14/5/2013
 Máquinas CNC - Categorías Oficial Múltiple Superior y Oficial Múltiple Conceptos técnicos involucrados Acuerdo del 14/5/2013 Preguntas frecuentes Todos los que operan Máquinas CNC reciben la nueva categoría?
Máquinas CNC - Categorías Oficial Múltiple Superior y Oficial Múltiple Conceptos técnicos involucrados Acuerdo del 14/5/2013 Preguntas frecuentes Todos los que operan Máquinas CNC reciben la nueva categoría?
Sistema mecánico de dirección a las cuatro ruedas para vehículos automóviles
 Sistema mecánico de dirección a las cuatro ruedas para vehículos automóviles D. Dopico, J. Cuadrado, P. Morer Escuela Politécnica Superior, Mendizábal s/n, 15403 Ferrol Tel: 981337400, Fax: 981337410,
Sistema mecánico de dirección a las cuatro ruedas para vehículos automóviles D. Dopico, J. Cuadrado, P. Morer Escuela Politécnica Superior, Mendizábal s/n, 15403 Ferrol Tel: 981337400, Fax: 981337410,
La masa es la magnitud física que mide la inercia de los cuerpos: N
 Pág. 1 16 Las siguientes frases, son verdaderas o falsas? a) Si el primer niño de una fila de niños que corren a la misma velocidad lanza una pelota verticalmente hacia arriba, al caer la recogerá alguno
Pág. 1 16 Las siguientes frases, son verdaderas o falsas? a) Si el primer niño de una fila de niños que corren a la misma velocidad lanza una pelota verticalmente hacia arriba, al caer la recogerá alguno
Simulaciones y prototipos en Second Life. Ing. Ana Lenny Hospinal
 Simulaciones y prototipos en Second Life Ing. Ana Lenny Hospinal Contenido Simulación Modelo Prototipo Second Life Simuladores y prototipos en SL Simulación de la funcionalidad del Inkarobot Simulación
Simulaciones y prototipos en Second Life Ing. Ana Lenny Hospinal Contenido Simulación Modelo Prototipo Second Life Simuladores y prototipos en SL Simulación de la funcionalidad del Inkarobot Simulación
UNIVERSIDAD TÉCNICA DE MANABÍ C.A.N.O CENTRO DE ADMISIÓN, NIVELACIÓN Y ORIENTACIÓN
 UNIVERSIDAD TÉCNICA DE MANABÍ TEMARIO PARA EL MÓDULO DE NIVELACIÓN Y EXAMEN DE LA EXONERACIÓN DE LA NIVELACIÓN CARRERA: Ingeniería de Sistemas Informáticos Ingeniería Civil Ingeniería Eléctrica Ingeniería
UNIVERSIDAD TÉCNICA DE MANABÍ TEMARIO PARA EL MÓDULO DE NIVELACIÓN Y EXAMEN DE LA EXONERACIÓN DE LA NIVELACIÓN CARRERA: Ingeniería de Sistemas Informáticos Ingeniería Civil Ingeniería Eléctrica Ingeniería
Grúas con Pluma de Celosía
 Línea de Grúas Grúas con Pluma de Celosía Grúas Montadas Sobre Orugas con Pluma de Celosía Modelo Capacidad Tipo y Longitud Combinación Altura Radio de Longitud Altura de Trabajo Capacidad Longitud Motor
Línea de Grúas Grúas con Pluma de Celosía Grúas Montadas Sobre Orugas con Pluma de Celosía Modelo Capacidad Tipo y Longitud Combinación Altura Radio de Longitud Altura de Trabajo Capacidad Longitud Motor
PRODUCTIVIDAD EN CORTE POR LÁSER
 IRIS LÁSER IRIS LÁSER PRODUCTIVIDAD EN CORTE POR LÁSER Danobat ha desarrollado una máquina de corte por láser basada en la tecnología de fibra. Se trata de una máquina de alta productividad, en la que
IRIS LÁSER IRIS LÁSER PRODUCTIVIDAD EN CORTE POR LÁSER Danobat ha desarrollado una máquina de corte por láser basada en la tecnología de fibra. Se trata de una máquina de alta productividad, en la que
UNIDAD 3: MEDIOS DE MANUTENCIÓN Y SISTEMAS DE ALMACENAJE
 UNIDAD 3: MEDIOS DE MANUTENCIÓN Y SISTEMAS DE ALMACENAJE EL MANEJO DE LAS MERCANCÍAS EN EL AMACÉN MEDIOS DE MANUTENCIÓN: Conjunto de medios técnicos, instrumentos y dispositivos que hacen posible la MANIPULACIÓN
UNIDAD 3: MEDIOS DE MANUTENCIÓN Y SISTEMAS DE ALMACENAJE EL MANEJO DE LAS MERCANCÍAS EN EL AMACÉN MEDIOS DE MANUTENCIÓN: Conjunto de medios técnicos, instrumentos y dispositivos que hacen posible la MANIPULACIÓN
21 LC 750. Versiones de 24, 36 y 48 t de carga máxima Sistema modular Flat-Top Hasta 725 m de altura y 80 m de alcance
 Versiones de 24, 36 y 48 t de carga máxima Sistema modular Flat-Top Hasta 725 m de altura y 80 m de alcance 21 LC 75 Modelo Longitud de pluma Altura autoestable Carga máxima Carga en punta Potencia de
Versiones de 24, 36 y 48 t de carga máxima Sistema modular Flat-Top Hasta 725 m de altura y 80 m de alcance 21 LC 75 Modelo Longitud de pluma Altura autoestable Carga máxima Carga en punta Potencia de
6. DESCRIPCIÓN DEL SOFTWARE
 Capítulo 2. Equipo 6. DESCRIPCIÓN DEL SOFTWARE 6.1 Introducción El equipo de medida descrito en el capítulo anterior lleva asociado un software que hace de sistema de control del proceso de medición. Este
Capítulo 2. Equipo 6. DESCRIPCIÓN DEL SOFTWARE 6.1 Introducción El equipo de medida descrito en el capítulo anterior lleva asociado un software que hace de sistema de control del proceso de medición. Este
FÍSICA Y QUÍMICA - 4º ESO LAS FUERZAS PRINCIPIOS FUNDAMENTALES DE LA DINÁMICA (LEYES DE NEWTON) INERCIA
 INERCIA") PRINCIPIOS FUNDAMENTALES DE LA DINÁMICA (LEYES DE NEWTON) INERCIA 1. Todo cuerpo tiene tendencia a permanecer en su estado de movimiento. Esta tendencia recibe el nombre de inercia. 2. La masa es una medida
PRINCIPIOS FUNDAMENTALES DE LA DINÁMICA (LEYES DE NEWTON) INERCIA 1. Todo cuerpo tiene tendencia a permanecer en su estado de movimiento. Esta tendencia recibe el nombre de inercia. 2. La masa es una medida
KONFORTA. KONFORTA es calidad, servicio, diseño, fiabilidad y seguridad.
 KONFORTA La gama de sillas salvaescaleras KONFORTA ofrece una solución para escaleras rectas sin cambio de pendiente, tanto en interior como en exterior. Estas sillas elevadoras están diseñadas para beneficiar
KONFORTA La gama de sillas salvaescaleras KONFORTA ofrece una solución para escaleras rectas sin cambio de pendiente, tanto en interior como en exterior. Estas sillas elevadoras están diseñadas para beneficiar
Máxima flexibilidad en paletizado automático al mejor precio
 Máxima flexibilidad en paletizado automático al mejor precio Sistemas de automatización para su proceso productivo Tecnowey, compañía líder en sistemas integrados y tecnología aplicada a la automatización,
Máxima flexibilidad en paletizado automático al mejor precio Sistemas de automatización para su proceso productivo Tecnowey, compañía líder en sistemas integrados y tecnología aplicada a la automatización,
Pruebas de campo Vehículos Eléctricos
 Pruebas de campo Vehículos Eléctricos Movilidad Eléctrica en el Transporte Público Intendencia de Montevideo - 13 de marzo 2014 Contenido 1. Pruebas de campo bus 100% Eléctrico 2. Resultados preliminares
Pruebas de campo Vehículos Eléctricos Movilidad Eléctrica en el Transporte Público Intendencia de Montevideo - 13 de marzo 2014 Contenido 1. Pruebas de campo bus 100% Eléctrico 2. Resultados preliminares
AUTOPROPULSADO TRANSPORTER
 AUTOPROPULSADO TRANSPORTER Ha llegado el momento de sacar mayor provecho de su varadero UN SALTO En productividad Maximize la rentabilidad de su varadero El objetivo de Marine Travelift es desarrollar
AUTOPROPULSADO TRANSPORTER Ha llegado el momento de sacar mayor provecho de su varadero UN SALTO En productividad Maximize la rentabilidad de su varadero El objetivo de Marine Travelift es desarrollar
Pedro Pérez Recuerda
 Información sobre la práctica La práctica realizada consta de un simulador de maniobras con un tanque. Inicialmente aparece un escenario que simula un paraje con pinos. En este se encuentran en todo momento
Información sobre la práctica La práctica realizada consta de un simulador de maniobras con un tanque. Inicialmente aparece un escenario que simula un paraje con pinos. En este se encuentran en todo momento
Universidad de Pamplona Sede Villa del Rosario LABORATORIO DE MECÁNICA CUESTIONARIO GUIA PARA LAS PRÁCTICAS DE LABORATORIO DE MECÁNICA
 Universidad de Pamplona Sede Villa del Rosario LABORATORIO DE MECÁNICA CUESTIONARIO GUIA PARA LAS PRÁCTICAS DE LABORATORIO DE MECÁNICA El cuestionario correspondiente a cada práctica de laboratorio debe
Universidad de Pamplona Sede Villa del Rosario LABORATORIO DE MECÁNICA CUESTIONARIO GUIA PARA LAS PRÁCTICAS DE LABORATORIO DE MECÁNICA El cuestionario correspondiente a cada práctica de laboratorio debe
Examen de Física-1, 1 Ingeniería Química Examen final. Septiembre de 2012 Problemas (Dos puntos por problema).
.") Examen de Física-1, 1 Ingeniería Química Examen final. Septiembre de 01 Problemas (Dos puntos por problema). Problema 1 (Primer parcial): Suponga que trabaja para una gran compañía de transporte y que
Examen de Física-1, 1 Ingeniería Química Examen final. Septiembre de 01 Problemas (Dos puntos por problema). Problema 1 (Primer parcial): Suponga que trabaja para una gran compañía de transporte y que
CONTROL Y ROBÓTICA. MECANIZACIÓN. Incorporación de máquinas para ejecutar determinadas tareas.
 CONTROL Y ROBÓTICA. MECANIZACIÓN. Incorporación de máquinas para ejecutar determinadas tareas. El propósito no es otro que realizar, de forma automática, una serie de acciones que anteriormente se llevaban
CONTROL Y ROBÓTICA. MECANIZACIÓN. Incorporación de máquinas para ejecutar determinadas tareas. El propósito no es otro que realizar, de forma automática, una serie de acciones que anteriormente se llevaban
CATÁLOGO DE ALQUILER. www.accesus.es
 CATÁLOGO DE ALQUILER www.accesus.es CATÁLOGO DE ALQUILER PLATAFORMAS MODULECO Con elevador manual m.lift 400 Con elevador motorizado e.lift 500 Con lira en C TABLA DE CARGAS MODULECO LONGITUD DE PLATAFORMA
CATÁLOGO DE ALQUILER www.accesus.es CATÁLOGO DE ALQUILER PLATAFORMAS MODULECO Con elevador manual m.lift 400 Con elevador motorizado e.lift 500 Con lira en C TABLA DE CARGAS MODULECO LONGITUD DE PLATAFORMA
Robótica Industrial. Curso. Morfología de un Robot Industrial. Parte I. Profesor Titular Universidad de Los Andes Mérida - Venezuela
 Curso Robótica Industrial Morfología de un Robot Industrial Parte I Profesor Titular Universidad de Los Andes Mérida - Venezuela Robótica Industrial Contenido Introducción Estructura mecánica Sistema de
Curso Robótica Industrial Morfología de un Robot Industrial Parte I Profesor Titular Universidad de Los Andes Mérida - Venezuela Robótica Industrial Contenido Introducción Estructura mecánica Sistema de
Ascensor Neumático UB30 (Unipersonal)
") Ascensor Neumático UB30 (Unipersonal) Ascensor Neumático UB30 (750) Unipersonal UB30 (750) Dossier Informativo ESPECIFICACIONES TÉCNICAS Generales Diámetro exterior del cilindro: 750mm Carga máxima: 159
Ascensor Neumático UB30 (Unipersonal) Ascensor Neumático UB30 (750) Unipersonal UB30 (750) Dossier Informativo ESPECIFICACIONES TÉCNICAS Generales Diámetro exterior del cilindro: 750mm Carga máxima: 159
La Experiencia marca la diferencia
 Pallet Racking Systems ESTANTERÍAS METÁLICAS PALETIZACIÓN La Experiencia marca la diferencia ESTANTERÍAS DEPALETIZACIÓN Sistema Convencional La estantería de Paletización Convencional es uno de los mejores
Pallet Racking Systems ESTANTERÍAS METÁLICAS PALETIZACIÓN La Experiencia marca la diferencia ESTANTERÍAS DEPALETIZACIÓN Sistema Convencional La estantería de Paletización Convencional es uno de los mejores
Posicionamiento de contenedores marítimos a bordo de buques portacontenedores.
 Posicionamiento de contenedores marítimos a bordo de buques portacontenedores. Problema presentado por Carles Rúa, Autoritat Portuària de Barcelona e Institut d Organització i Control de Sistemas Industrials
Posicionamiento de contenedores marítimos a bordo de buques portacontenedores. Problema presentado por Carles Rúa, Autoritat Portuària de Barcelona e Institut d Organització i Control de Sistemas Industrials
SISTEMA SOFTWARE DE ALMACÉN
 ES SISTEMA SOFTWARE DE ALMACÉN Modula WMS Modula WMS es un software de gestión de almacén ideal para controlar y gestionar almacenes tradicionales (áreas manuales con estanterías) y sistemas automáticos.
ES SISTEMA SOFTWARE DE ALMACÉN Modula WMS Modula WMS es un software de gestión de almacén ideal para controlar y gestionar almacenes tradicionales (áreas manuales con estanterías) y sistemas automáticos.
Tema 5: Dinámica del punto II
 Tema 5: Dinámica del punto II FISICA I, 1º Grado en Ingeniería Civil Escuela Técnica Superior de Ingeniería Universidad de Sevilla 1 Índice Leyes de Newton Dinámica del punto material Trabajo mecánico
Tema 5: Dinámica del punto II FISICA I, 1º Grado en Ingeniería Civil Escuela Técnica Superior de Ingeniería Universidad de Sevilla 1 Índice Leyes de Newton Dinámica del punto material Trabajo mecánico
VENTAJAS INCONVENIENTES
 1 ALMACENAJE EN BLOQUE Cargas directamente en el suelo. Mercancías paletizadas o sin paletizar. Método barato y flexible, siempre que se disponga de espacio. Inversión nula. Recomendable en productos no
1 ALMACENAJE EN BLOQUE Cargas directamente en el suelo. Mercancías paletizadas o sin paletizar. Método barato y flexible, siempre que se disponga de espacio. Inversión nula. Recomendable en productos no
COLUMNAS MOVILES INDEPENDIENTES SERIE MCL DESCRIPCION TÉCNICA
 COLUMNAS MOVILES INDEPENDIENTES SERIE MCL DESCRIPCION TÉCNICA La presente relación técnica se compone de los siguientes apartados: CARACTERÍSTICAS TÉCNICAS EXCLUSIVAS RELACIÓN DIRECTIVAS Y NORMAS ADOPTADAS
COLUMNAS MOVILES INDEPENDIENTES SERIE MCL DESCRIPCION TÉCNICA La presente relación técnica se compone de los siguientes apartados: CARACTERÍSTICAS TÉCNICAS EXCLUSIVAS RELACIÓN DIRECTIVAS Y NORMAS ADOPTADAS
Los cargadores de nitrógeno HYDAC permiten un llenado rápido y barato o completar la presión de precarga de gas necesario en acumuladores de vejiga,
 Los cargadores de nitrógeno HYDAC permiten un llenado rápido y barato o completar la presión de precarga de gas necesario en acumuladores de vejiga, membrana y pistón. Garantizan un aprovechamiento óptimo
Los cargadores de nitrógeno HYDAC permiten un llenado rápido y barato o completar la presión de precarga de gas necesario en acumuladores de vejiga, membrana y pistón. Garantizan un aprovechamiento óptimo
Objetivos específicos de aprendizaje
 Introducir un cambio en la metodología de la enseñanza de las Matemáticas en general, y de la geometría en particular, con la ayuda de las NTIC, consiguiendo un mayor dinamismo en las clases, que repercuta
Introducir un cambio en la metodología de la enseñanza de las Matemáticas en general, y de la geometría en particular, con la ayuda de las NTIC, consiguiendo un mayor dinamismo en las clases, que repercuta
ORIENTACIONES PARA LA MATERIA DE FÍSICA Convocatoria 2010
 ORIENTACIONES PARA LA MATERIA DE FÍSICA Convocatoria 2010 Prueba de Acceso para Mayores de 25 años Para que un adulto mayor de 25 años pueda incorporarse plenamente en los estudios superiores de la Física
ORIENTACIONES PARA LA MATERIA DE FÍSICA Convocatoria 2010 Prueba de Acceso para Mayores de 25 años Para que un adulto mayor de 25 años pueda incorporarse plenamente en los estudios superiores de la Física
ETAPA DE PREPROCESADO. Generación de geometría. Generación de malla ETAPA DE RESOLUCIÓN. Definición de modelos físicos
 La simulación de flujos mediante técnicas computacionales se convertirá en un futuro cercano en una de las herramientas de diseño más valoradas por ingenieros y arquitectos dada su eficacia y versatilidad.
La simulación de flujos mediante técnicas computacionales se convertirá en un futuro cercano en una de las herramientas de diseño más valoradas por ingenieros y arquitectos dada su eficacia y versatilidad.
Criterios de Implantación de un robot industrial
 Criterios de Implantación de un robot industrial Diseño y control de una célula robotizada Características a considerar en la selección Seguridad en instalaciones robotizadas Mercado de robots Robotica
Criterios de Implantación de un robot industrial Diseño y control de una célula robotizada Características a considerar en la selección Seguridad en instalaciones robotizadas Mercado de robots Robotica
Simulación y modelización de las escaleras mecánicas como vía para la mejora del confort de los pasajeros y la disminución de costes
 Simulación y modelización de las escaleras mecánicas como vía para la mejora del confort de los pasajeros y la disminución de costes J.D. Cano, J.M. Cabanellas, J.A. Chover y B. Suarez La escalera mecánica
Simulación y modelización de las escaleras mecánicas como vía para la mejora del confort de los pasajeros y la disminución de costes J.D. Cano, J.M. Cabanellas, J.A. Chover y B. Suarez La escalera mecánica
Por profesionales, para profesionales. Accesibilidad. y Plataformas
 Por profesionales, para profesionales Accesibilidad y Plataformas Plataformas y Sillas Salvaescaleras En Raloe disponemos de una división de soluciones de accesibilidad, enfocada a salvar las barreras
Por profesionales, para profesionales Accesibilidad y Plataformas Plataformas y Sillas Salvaescaleras En Raloe disponemos de una división de soluciones de accesibilidad, enfocada a salvar las barreras
LISTADO DE PROYECTOS DEL CAMPUS PRAKTIUM UPV-FUNCAE 2012. ETS de Ingeniería del Diseño Grado en Ingeniería Electrónica Industrial y Automática
 17 Grado en Ingeniería Electrónica Industrial y Automática Construye un mini robot Un robot es un sistema capaz de reralizar tareas de manera automática y generálmente capaz de desplazarse. Se propone
17 Grado en Ingeniería Electrónica Industrial y Automática Construye un mini robot Un robot es un sistema capaz de reralizar tareas de manera automática y generálmente capaz de desplazarse. Se propone
UNIVERSIDAD DEL VALLE DE MÉXICO PROGRAMA DE ESTUDIO DE LICENCIATURA PRAXIS MES XXI
 UNIVERSIDAD DEL VALLE DE MÉXICO PROGRAMA DE ESTUDIO DE LICENCIATURA PRAXIS MES XXI NOMBRE DE LA ASIGNATURA: ROBÓTICA I FECHA DE ELABORACIÓN: MARZO 2005 ÁREA DEL PLAN DE ESTUDIOS: AS ( ) AC ( ) APOBL (
UNIVERSIDAD DEL VALLE DE MÉXICO PROGRAMA DE ESTUDIO DE LICENCIATURA PRAXIS MES XXI NOMBRE DE LA ASIGNATURA: ROBÓTICA I FECHA DE ELABORACIÓN: MARZO 2005 ÁREA DEL PLAN DE ESTUDIOS: AS ( ) AC ( ) APOBL (
Dell PowerEdge T20 Guía de introducción
 Dell PowerEdge T20 Guía de introducción Modelo reglamentario: D13M Tipo reglamentario: D13M001 Notas, precauciones y avisos NOTA: Una NOTA proporciona información importante que le ayuda a utilizar mejor
Dell PowerEdge T20 Guía de introducción Modelo reglamentario: D13M Tipo reglamentario: D13M001 Notas, precauciones y avisos NOTA: Una NOTA proporciona información importante que le ayuda a utilizar mejor
PROYECTO FIN DE CARRERA Ingeniería Industrial. Sistemas de Ventilación en Ferrocarriles Metropolitanos: Panorámica y Estrategias de Diseño
 UNIVERSIDAD CARLOS III DE MADRID DEPARTAMENTO DE INGENIERIA TÉRMICA Y DE FLUIDOS PROYECTO FIN DE CARRERA Ingeniería Industrial Sistemas de Ventilación en Ferrocarriles Metropolitanos: Panorámica y Estrategias
UNIVERSIDAD CARLOS III DE MADRID DEPARTAMENTO DE INGENIERIA TÉRMICA Y DE FLUIDOS PROYECTO FIN DE CARRERA Ingeniería Industrial Sistemas de Ventilación en Ferrocarriles Metropolitanos: Panorámica y Estrategias
Características Morfológicas. Principales características de los Robots.
 Características Morfológicas Principales características de los Robots. Se describen las características más relevantes propias de los robots y se proporcionan valores concretos de las mismas, para determinados
Características Morfológicas Principales características de los Robots. Se describen las características más relevantes propias de los robots y se proporcionan valores concretos de las mismas, para determinados