AUTOR: NELSON ALDAZ DISEÑO E IMPLEMENTACIÓN DE UN CONTROLADOR MEDIANTE SOFTWARE LIBRE PARA EL MANIPULADOR SCORBOT-ER III DE 5 GRADOS DE LIBERTAD
|
|
|
- Miguel Martín Carmona Giménez
- hace 5 años
- Vistas:
Transcripción


1 AUTOR: NELSON ALDAZ DISEÑO E IMPLEMENTACIÓN DE UN CONTROLADOR MEDIANTE SOFTWARE LIBRE PARA EL MANIPULADOR SCORBOT-ER III DE 5 GRADOS DE LIBERTAD Latacunga, 2016
2 AGENDA Objetivo Marco Teórico Diseño e implementación del hardware del controlador Diseño e implementación del software de control Pruebas y Resultados Conclusiones y Recomendaciones
3 OBJETIVO Diseñar e implementar un controlador genérico mediante software libre para el manipulador SCORBOT-ER de 5 grados de libertad.
4 MARCO TEÓRICO
5 FUNDAMENTOS TEÓRICOS PARA MANIPULADORES El desarrollo de un controlador para un robot requiere del estudio de cuatro campos: Actuadores, Sensores Controlador Software

6 ACTUADORES Dispositivos Mecánicos que proporcionan fuerza para mover otro dispositivo.
7 Control Unidireccional El control de un motor se logra con un solo interruptor. Control Bidireccional Se necesitan cuatro interruptores. Control de Velocidad Su funcionamiento se basa en modulación de Ancho de Pulso o PWM.

8 SENSORES Los mas importantes para un manipulador robótico son los que permitan determinar la posición y orientación de sus eslabones. Potenciómetros Señal analógica que depende del ángulo que esté girada su perilla de control.

9 Encoders Convierte el movimiento de un dispositivo en trenes de pulso para dar a conocer desplazamiento, dirección y posición.
10 Acelerómetros Dispositivo electromecánico capaz de medir aceleraciones; un acelerómetro de 3 ejes informará de la inclinación de su superficie respecto a la de la superficie terrestre. Interruptores Mecánicos Permite el paso o no el paso de corriente eléctrica a través de una línea de conducción.
11 CONTROLADOR HARDWARE Dispositivo basado en micro controladores con entradas y salidas para operar actuadores, sensores y interactuar con otros dispositivos. SOFTWARE SCORBASE es el software original. Cualquier programa escrito para controlar un robot manipulador deberá contener las ecuaciones cinemáticas que describen su movimiento.
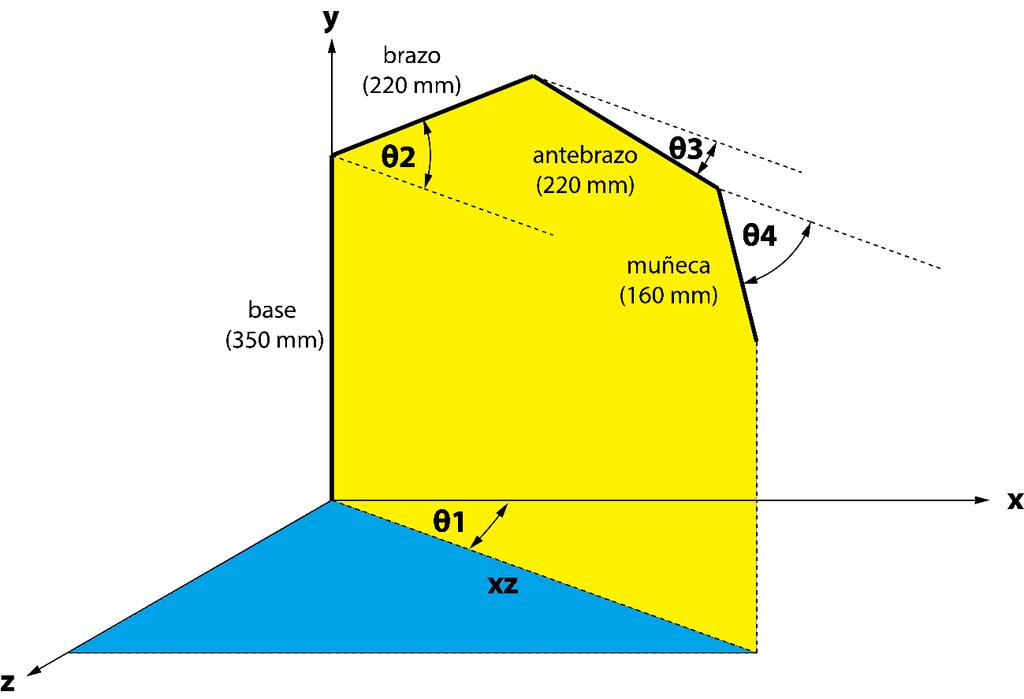
12 MODELO CINEMÁTICO DIRECTO Determina las coordenadas del extremo del Robot a partir del conocimiento de las longitudes de los eslabones y los ángulos que forman los mismos.
13 MODELO CINEMÁTICO INVERSO Determina los ángulos que forman los eslabones a partir del conocimiento de las coordenadas del extremo del robot y la longitud de los eslabones.
14 DESCRIPCIÓN DEL SCORBOT ER III Desarrollado a principios de los años 80. Brazo robótico articulado de 5 grados de libertad, diseñado para el aprendizaje. Robustez en su estructura mecánica y actuadores.
15 MORFOLOGÍA DEL ROBOT
16 MOVIMIENTO DE LAS ARTICULACIONES Articulación Número Nombre de la Articulación Tipo de Movimiento de la Articulación Motor Número 1 Base Giratorio (Enrollado) 1 2 Hombro Giratorio (Enrollado) 2 3 Codo Giratorio (Enrollado) 3 4 Muñeca (Elevación) Giratorio (Enrollado) Muñeca (Giro) Giratorio (Enrollado) Pinza Lineal (Prismático): Apertura y cierre 6
17 COMPONENTES 6 motores eléctricos marca Pittman de 12 V y 2 A para mover las articulaciones. 5 interruptores para encontrar la posición HOME. 6 encoders incrementales para medir el desplazamiento de las articulaciones.
18 DISEÑO E IMPLEMENTACIÓN DEL HARDWARE DEL CONTROLADOR
19 REQUERIMIENTOS DEL CONTROLADOR Voltaje de alimentación Tipo de comunicación Precisión Paro de emergencia Temperatura de operación Entradas adicionales
20 SELECCIÓN DE LOS COMPONENTES DEL CONTROLADOR Selección de la Tarjeta Madre Ponde Pondera Compone nte Precio (USD) Comunic ación Número de pines ración de númer o de Complejida d de programaci ón ción de compleji dad de program Pondera ción total pines ación PIC 18F Serial 30 5 Arduino MEGA 22 USB Raspberry Pi 75 USB 17 0 Multilenguaj e 5 10 Multilenguaj e, IDE dedicada y libre Requiere sistema 0 0
21 Modelo Marca Vmáx (V) Imáx (A) Precio (USD) Ponderación Facilidad de adquisición Ponderación Ponderación total Selección de las Tarjetas Controladoras de Motores Roboclaw 2x5A Orion Robotics 34 5 Alto 0 Medi a 5 5 Sabertooth 2X5 DimensionEngineerin Medi 18 5 Alto 0 g a 5 5 Motor Shield V3 Arduino 12 2 Alto 0 Medi a 5 5 L298N dual driver STMicroelectronics 12 2 Bajo 10 Baja a ux004 0 UX Motor 24 2 Bajo 10 Alta 0 10 L6206 STMicroelectronics Medi Medi 5 o a 5 10 Medi
22 Selección de Fuente de Alimentación Ponder Fuente Beneficios Voltajes disponibles (V) ación de voltajes disponi Costo (USD) Ponderaci ón de costo Ponderaci ón total bles Lineal Diseño Simple 5, -5, 12, - 12, voltaje regulable 10 Medio 5 15 Conmutada Mayor eficiencia 5 o 12 0 Alto 0 0 ATX Diseño confiable 3, 5, -5, 12 y Bajo 10 20

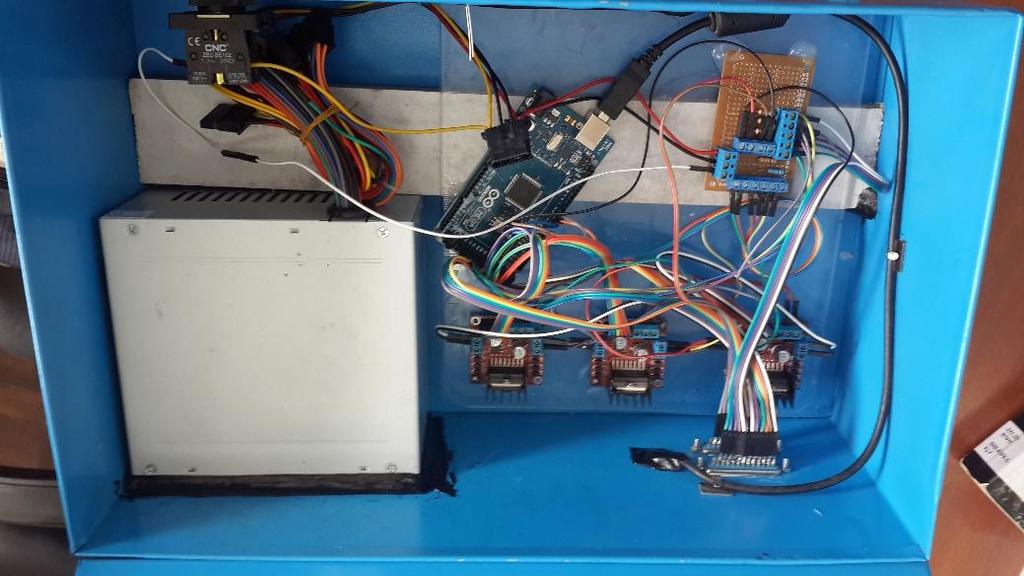
23 INTEGRACIÓN DE LOS COMPONENTES
24 DISEÑO E IMPLEMENTACIÓN DEL SOFTWARE DE CONTROL
25 REQUERIMIENTOS FUNCIONALES Cinemática directa Cinemática inversa Interpolación lineal Interpolación circular Posición HOME Programación de secuencias Control de apertura de la pinza
26 Programa Complejidad Ponderación Velocidad de trabajo Ponderación Funcionalidad Ponderación Ponderación total SELECCIÓN DEL SOFTWARE DE PROGRAMACIÓN Blender Alta 0 Alta 10 Media 5 15 NetBeans Media 5 Media 5 Media 5 15 VPython Baja 10 Baja 0 Alta 10 20
27 CINEMÁTICA DIRECTA
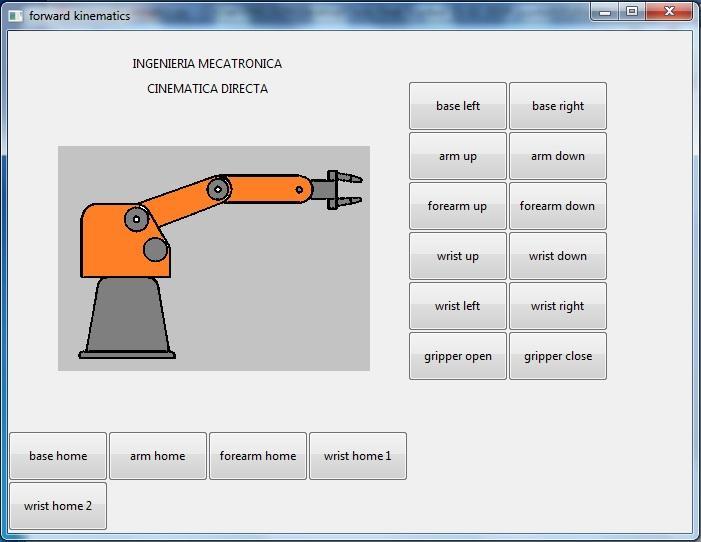
28
29 CINEMÁTICA INVERSA
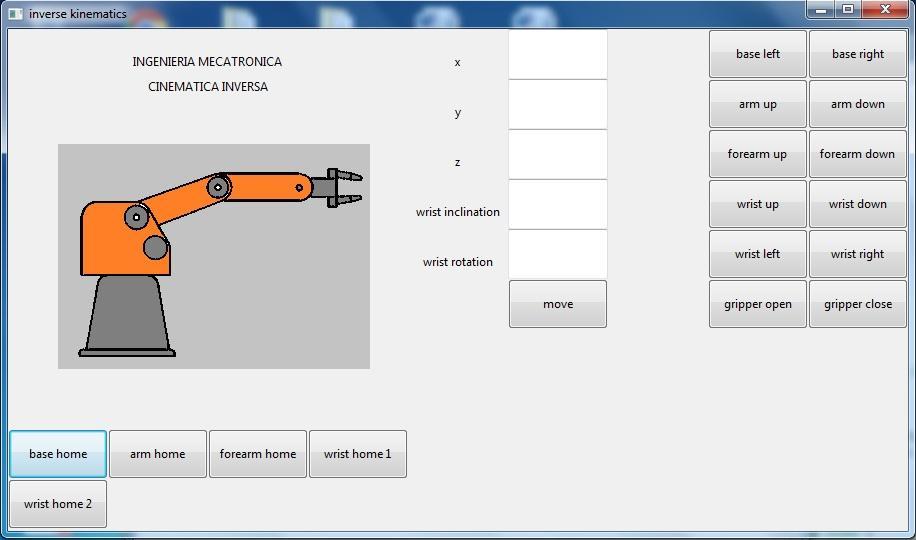
30
31 POSICIÓN HOME
32 Inicio Los encoders de las articulaciones se activan para detectar cualquier movimiento El motor de la base empieza a girar a la derecha El interruptor de la base está activado No El motor sigue girando Sí El motor se detiene El programa fija el contador de la base en -80 El motor empieza a moverse a la izquierda El contador esta en 0 No El motor sigue girando Sí El motor se detiene Fin


33 Inicio Los encoders de las articulaciones se activan para detectar cualquier movimiento MOVIMIENTO SECUENCIAL El usuario mueve el robot hasta la posición deseada El usuario indica que la posición actual debe guardarse El programa registra las lecturas actuales de los encoders Botón MOVER activado No Sí El programa calcula los movimientos que debe realizar El brazo robótico se mueve para alcanzar las posiciones guardadas Al terminar la ejecución de la rutina el programa borra las posiciones de su memoria Inicio
34 Inicio El usuario ingresa las coordenadas de los puntos inicial y final de la recta INTERPOLACIÓN LINEAL El programa verifica que los valores ingresados sean números El programa calcula las posiciones que el robot debe alcanzar para recorrer la línea deseada Se verifica que todas las posiciones puedan alcanzarse Todas las posiciones son legales? No Sí El robot se mueve a cada uno de los puntos calculados Al terminar la ejecución de la rutina el programa borra las posiciones de su memoria Fin
35 Inicio El usuario ingresa las coordenadas del centro y el valor del radio INTERPOLACIÓN CIRCULAR El programa verifica que los valores ingresados sean números El programa calcula las posiciones que el robot debe alcanzar para recorrer el circulo deseado Se verifica que todas las posiciones puedan alcanzarse Todas las posiciones son legales? No Sí El robot se mueve a cada uno de los puntos calculados Al terminar la ejecución de la rutina el programa borra las posiciones de su memoria Fin
36 PRUEBAS Y RESULTADOS
37 Programa Error mecánico (mm) Cinemática directa 14 Cinemática inversa 14 Home 14 Movimiento secuencial 12 Interpolación lineal 20 Interpolación circular 15
38 CONCLUSIONES Y RECOMENDACIONES
39 Se diseñó y construyó un controlador genérico para repotenciar el brazo robótico SCORBOT ER III que permite ejecutar las siguientes tareas: posicionamiento HOME, cinemática directa, cinemática inversa, movimiento secuencial, interpolación lineal e interpolación circular. La información técnica recopilada del estado del arte y la documentación del robot fueron de utilidad para conocer los requerimientos, ventajas y limitaciones del Scorbot y diseñar el controlador más adecuado para este equipo.
40 En el posicionamiento HOME, cinemática directa, cinemática inversa y movimiento secuencial se alcanzó un error máximo permitido debido mayormente a desajustes mecánicos de la estructura del robot. La interpolación lineal e interpolación circular presentan errores mayores a las otras funciones debido principalmente a que en estas intervienen dos o más de las funciones primarias. Con la implementación de este proyecto los estudiantes que tomen asignaturas relacionadas con robótica industrial tendrán la oportunidad de profundizar sus conocimientos sobre manipuladores.
41 En Proyectos posteriores se invita a revisar la parte mecánica del manipulador, para realizar un mantenimiento preventivo y correctivo de ser necesario, ya que la existencia de elementos mecánicos defectuosos producen errores en cuanto a los movimientos realizados por el robot. Para la implementación de proyectos similares se recomienda utilizar componentes de iguales características o superiores a la tarjeta Arduino MEGA, driver L298N y fuente de poder ATX de 750 W. Antes de operar el Scorbot con el controlador genérico se recomienda leer el manual de usuario del controlador a fin de evitar daños en el equipo.
42 Es recomendable revisar el estado del robot y de las conexiones del controlador siempre que se vaya a iniciar una sesión de trabajo con el robot. En este proyecto se presentó la resolución geométrica de la cinemática inversa del robot; es recomendable incursionar en otros métodos de resolución de la cinemática inversa a fin de mejorar la experiencia del usuario cuando utilice este equipo.
43 GRACIAS POR SU ATENCIÓN
El sistema robótico está seccionado en dos partes: el brazo mecánico y su controlador electrónico.
 3 DESCRIPCIÓN DE LAS CARACTERÍSTICAS DEL BRAZO El sistema robótico está seccionado en dos partes: el brazo mecánico y su controlador electrónico. 3.1 CARACTERÍSTICAS MECÁNICAS DEL BRAZO El brazo robot
3 DESCRIPCIÓN DE LAS CARACTERÍSTICAS DEL BRAZO El sistema robótico está seccionado en dos partes: el brazo mecánico y su controlador electrónico. 3.1 CARACTERÍSTICAS MECÁNICAS DEL BRAZO El brazo robot
DEPARTAMENTO DE ENERGÍA Y MECÁNICA
 DEPARTAMENTO DE ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA EN MECATRÓNICA TRABAJO DE TITULACIÓN, PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN MECATRÓNICA TEMA: DISEÑO E IMPLEMENTACIÓN DE UN CONTROLADOR
DEPARTAMENTO DE ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA EN MECATRÓNICA TRABAJO DE TITULACIÓN, PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN MECATRÓNICA TEMA: DISEÑO E IMPLEMENTACIÓN DE UN CONTROLADOR
Cinemática del Robot. CI-2657 Robótica M.Sc. Kryscia Ramírez Benavides
 M.Sc. Kryscia Ramírez Benavides Sistema Robótico Cinemática Dinámica Planeamiento de Tareas Software Hardware Diseño Mecánico Actuadores Sistema de Control Sensores 2 Introducción Con el fin de controlar
M.Sc. Kryscia Ramírez Benavides Sistema Robótico Cinemática Dinámica Planeamiento de Tareas Software Hardware Diseño Mecánico Actuadores Sistema de Control Sensores 2 Introducción Con el fin de controlar
CAPÍTULO 6: EL ROBOT MANIPULADOR SCORBOT
 Aplicaciones de controlador Bluetooth en Robótica. 1 CAPÍTULO 6: EL ROBOT MANIPULADOR SCORBOT Ahora vamos a documentar el otro elemento clave de nuestro trabajo: el robot manipulador Scorbot. Este modelo
Aplicaciones de controlador Bluetooth en Robótica. 1 CAPÍTULO 6: EL ROBOT MANIPULADOR SCORBOT Ahora vamos a documentar el otro elemento clave de nuestro trabajo: el robot manipulador Scorbot. Este modelo
TSTC. Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 1 INTRODUCCIÓN A LA ROBÓTICA
 Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 1 INTRODUCCIÓN A LA ROBÓTICA Secciones 1. Introducción y definiciones. 2. Visión General de la manipulación mecánica. 1. Posicionamiento y Cinemática
Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 1 INTRODUCCIÓN A LA ROBÓTICA Secciones 1. Introducción y definiciones. 2. Visión General de la manipulación mecánica. 1. Posicionamiento y Cinemática
Robótica Dr. José Antonio Garrido Natarén INGENIERÍA MECATRÓNICA. Unidad 1.- Morfología del robot. 1.2 Estructura mecánica de los robots.
 SECRETARÍA DE EDUCACIÓN PÚBLICA TECNOLÓGICA NACIONAL DE MÉXICO INSTITUTIO TECNOLÓGICO DE VERACRUZ Robótica Dr. José Antonio Garrido Natarén INGENIERÍA MECATRÓNICA Unidad 1.- Morfología del robot 1.2 Estructura
SECRETARÍA DE EDUCACIÓN PÚBLICA TECNOLÓGICA NACIONAL DE MÉXICO INSTITUTIO TECNOLÓGICO DE VERACRUZ Robótica Dr. José Antonio Garrido Natarén INGENIERÍA MECATRÓNICA Unidad 1.- Morfología del robot 1.2 Estructura
Cinemática del Robot. UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides
 UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. Se interesa por la
UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. Se interesa por la
Diseño de un robot móvil con modelo cinemático Ackermann
 Diseño de un robot móvil con modelo cinemático Ackermann. CUJAE.2017 1 Diseño de un robot móvil con modelo cinemático Ackermann J. Piñera-García *,1, J. Amigó-Vega *,1, J. Concepción-Álvarez 1, R. Casimiro-Martínez
Diseño de un robot móvil con modelo cinemático Ackermann. CUJAE.2017 1 Diseño de un robot móvil con modelo cinemático Ackermann J. Piñera-García *,1, J. Amigó-Vega *,1, J. Concepción-Álvarez 1, R. Casimiro-Martínez
Diseño e implementación de una plataforma robótica móvil inalámbrica con tracción intercambiable para el laboratorio de Mecatrónica de la ESPE-L
 Diseño e implementación de una plataforma robótica móvil inalámbrica con tracción intercambiable para el laboratorio de Mecatrónica de la ESPE-L Por Paúl Tinizaray Características del terreno Conocer las
Diseño e implementación de una plataforma robótica móvil inalámbrica con tracción intercambiable para el laboratorio de Mecatrónica de la ESPE-L Por Paúl Tinizaray Características del terreno Conocer las
INGENIERÍA EN MECATRONICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE FUNDAMENTOS DE ROBÓTICA INDUSTRIAL
 INGENIERÍA EN MECATRONICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE FUNDAMENTOS DE ROBÓTICA INDUSTRIAL 1. Competencias Desarrollar proyectos de automatización y control, a través del diseño, la administración
INGENIERÍA EN MECATRONICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE FUNDAMENTOS DE ROBÓTICA INDUSTRIAL 1. Competencias Desarrollar proyectos de automatización y control, a través del diseño, la administración
Manipulación. Tarea de manipular con destreza, hacer operaciones con las manos. Es el manejo hábil de los objetos. V. Angélica García Vega
 Manipulación Tarea de manipular con destreza, hacer operaciones con las manos. Es el manejo hábil de los objetos Brazo robótico Manipulador Efector final o pinza Cinemática Estudia las relaciones entre
Manipulación Tarea de manipular con destreza, hacer operaciones con las manos. Es el manejo hábil de los objetos Brazo robótico Manipulador Efector final o pinza Cinemática Estudia las relaciones entre
CAPÍTULO 3 ETAPA ELECTRÓNICA. 3.1 Introducción
 CAPÍTULO ETAPA ELECTRÓNICA En este capítulo se presenta el estudio de la conmutación en el sentido de los motores de corriente continua, así como la naturaleza de las señales que proceden de los sensores..
CAPÍTULO ETAPA ELECTRÓNICA En este capítulo se presenta el estudio de la conmutación en el sentido de los motores de corriente continua, así como la naturaleza de las señales que proceden de los sensores..
CINEMÁTICA INVERSA DE ROBOTS INDUSTRIALES
 I EMETRE DE 00 CINEMÁTICA INVERA DE ROBOT INDUTRIALE GERMÁN ANDRÉ RAMO FUENTE * 1. Introducción El uso de robots en ambientes industriales, y más precisamente en procesos de manufactura, ha generado toda
I EMETRE DE 00 CINEMÁTICA INVERA DE ROBOT INDUTRIALE GERMÁN ANDRÉ RAMO FUENTE * 1. Introducción El uso de robots en ambientes industriales, y más precisamente en procesos de manufactura, ha generado toda
FMS-200 Módulo de Formación 6: Actuadores eléctricos FMS-200
 FMS-200 Módulo de Formación 6: Actuadores eléctricos FMS-200 INDICE Indice: 1.- Visión General 2.- Actuadores Eléctricos SMC (LEF) 3.- Preguntas Introducción: El actuador eléctrico es un sistema electromecánico
FMS-200 Módulo de Formación 6: Actuadores eléctricos FMS-200 INDICE Indice: 1.- Visión General 2.- Actuadores Eléctricos SMC (LEF) 3.- Preguntas Introducción: El actuador eléctrico es un sistema electromecánico
INTRODUCCIÓN A LA MECÁNICA DEL ROBOT. Curso de Extensión. Tema 2. Laboratorio de Robótica Aplicada (LABRA) 1
 1") Curso de Extensión INTRODUCCIÓN A LA ROBÓTICA MÓVILM (LABRA) 1 Curso de Introducción n a la Robótica MóvilM Tema 2 MECÁNICA DEL ROBOT (LABRA) 2 La Capa Física: F Diseño o Mecánico Configuración de las
Curso de Extensión INTRODUCCIÓN A LA ROBÓTICA MÓVILM (LABRA) 1 Curso de Introducción n a la Robótica MóvilM Tema 2 MECÁNICA DEL ROBOT (LABRA) 2 La Capa Física: F Diseño o Mecánico Configuración de las
Práctica 14 Movimiento del robot Fanuc M16i usando el método JOINT
 Práctica 14 Movimiento del robot Fanuc M16i usando el método JOINT Objetivo Conocimiento sobre el robot FANUC M16i e interactuar con él, por medio del método de movimiento JOINT. Preguntas detonantes 1)
Práctica 14 Movimiento del robot Fanuc M16i usando el método JOINT Objetivo Conocimiento sobre el robot FANUC M16i e interactuar con él, por medio del método de movimiento JOINT. Preguntas detonantes 1)
Dispositivos de Entrada/Salida
 Dispositivos de Entrada/Salida Notas de clase: Unidad IV Materia: Diseño y Paradigmas de Lenguajes Carrera: Ingeniería en Informática/Ingeniería en Computación Universidad Nacional de San Luis 20/09/2017
Dispositivos de Entrada/Salida Notas de clase: Unidad IV Materia: Diseño y Paradigmas de Lenguajes Carrera: Ingeniería en Informática/Ingeniería en Computación Universidad Nacional de San Luis 20/09/2017
INGENIERÍA PROFESIONAL EN INOCUIDAD ALIMENTARIA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ROBÓTICA
 INGENIERÍA PROFESIONAL EN INOCUIDAD ALIMENTARIA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ROBÓTICA UNIDADES DE APRENDIZAJE 1. Competencias Automatizar procesos de producción mediante la implementación
INGENIERÍA PROFESIONAL EN INOCUIDAD ALIMENTARIA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ROBÓTICA UNIDADES DE APRENDIZAJE 1. Competencias Automatizar procesos de producción mediante la implementación
Robótica aplicada con labview y lego
 Robótica aplicada con labview y lego Pedro Ponce Cruz Víctor M. de la Cueva Hernández Hiram Ponce Espinosa Selecciona la imagen para entrar Capítulo 1 Introducción a la robótica Continuar Introducción
Robótica aplicada con labview y lego Pedro Ponce Cruz Víctor M. de la Cueva Hernández Hiram Ponce Espinosa Selecciona la imagen para entrar Capítulo 1 Introducción a la robótica Continuar Introducción
ya que se han desarrollado en diversos campos. En la industria los podemos encontrar en
 CAPÍTULO 1 Antecedentes Actualmente los robots ocupan un aspecto muy importante dentro de la ingeniería ya que se han desarrollado en diversos campos. En la industria los podemos encontrar en una gran
CAPÍTULO 1 Antecedentes Actualmente los robots ocupan un aspecto muy importante dentro de la ingeniería ya que se han desarrollado en diversos campos. En la industria los podemos encontrar en una gran
FUNDAMENTOS DE ROBÓTICA INDUSTRIAL HOJA DE ASIGNATURA CON DESGLOSE DE UNIDADES TEMÁTICAS
 HOJA DE ASIGNATURA CON DESGLOSE DE UNIDADES TEMÁTICAS 1. Nombre de la asignatura Optativa I Fundamentos de Robótica Industrial 2. Competencia(s) a la(s) que contribuye la asignatura Desarrollar proyectos
HOJA DE ASIGNATURA CON DESGLOSE DE UNIDADES TEMÁTICAS 1. Nombre de la asignatura Optativa I Fundamentos de Robótica Industrial 2. Competencia(s) a la(s) que contribuye la asignatura Desarrollar proyectos
Selección de un Robot Industrial. Prof. J. Milland
 Prof. J. Milland Si debemos robotizar un determinado proceso, debemos seleccionar el robot mas adecuado teniendo en consideración los servicios y el costo. Las características que debemos estar estudiando
Prof. J. Milland Si debemos robotizar un determinado proceso, debemos seleccionar el robot mas adecuado teniendo en consideración los servicios y el costo. Las características que debemos estar estudiando
Diadema Inalámbrica para Controlar Silla de Ruedas para Personas Tetrapléjicas
 Diadema Inalámbrica para Controlar Silla de Ruedas para Personas Tetrapléjicas Román Osorio, Elizabeth Coria 1, Rocío Santiago 1. Departamento de Ingeniería de Sistemas Computacionales y Automatización
Diadema Inalámbrica para Controlar Silla de Ruedas para Personas Tetrapléjicas Román Osorio, Elizabeth Coria 1, Rocío Santiago 1. Departamento de Ingeniería de Sistemas Computacionales y Automatización
Manual de Usuario RoboticSAD. Universidad Pedagógica Nacional Licenciatura en Electrónica. Elaborado por: Yuli Marcela Marín Peña
 Manual de Usuario RoboticSAD Universidad Pedagógica Nacional Licenciatura en Electrónica Elaborado por: Yuli Marcela Marín Peña Manual de Usuario RoboticSAD RoboticSAD es un Software de Apoyo Didáctico
Manual de Usuario RoboticSAD Universidad Pedagógica Nacional Licenciatura en Electrónica Elaborado por: Yuli Marcela Marín Peña Manual de Usuario RoboticSAD RoboticSAD es un Software de Apoyo Didáctico
Examen de TEORIA DE MAQUINAS Diciembre 03 Nombre...
 Examen de TEORIA DE MAQUINAS Diciembre 03 Nombre... La figura muestra un manipulador paralelo horizontal plano, que consta de una plataforma en forma de triángulo equilátero de lado l, cuya masa m se halla
Examen de TEORIA DE MAQUINAS Diciembre 03 Nombre... La figura muestra un manipulador paralelo horizontal plano, que consta de una plataforma en forma de triángulo equilátero de lado l, cuya masa m se halla
TECNOLOGICO NACIONAL DE MEXICO
 TECNOLOGICO NACIONAL DE MEXICO INSTITUTO TECNOLOGICO DE VERACRUZ ROBOTICA CLAVE 9F1A DR. JOSE ANTONIO GARRIDO NATAREN ING. MECATRONICA EQUIPO I UNIDAD I MORFOLOGIA DEL ROBOT 1.2 ESTRUCTURA MECANICA DE
TECNOLOGICO NACIONAL DE MEXICO INSTITUTO TECNOLOGICO DE VERACRUZ ROBOTICA CLAVE 9F1A DR. JOSE ANTONIO GARRIDO NATAREN ING. MECATRONICA EQUIPO I UNIDAD I MORFOLOGIA DEL ROBOT 1.2 ESTRUCTURA MECANICA DE
FACULTAD DE INGENIERÍA Departamento de Ingeniería Industrial
 FACULTAD DE INGENIERÍA Departamento de Ingeniería Industrial Código Materia: Código: 05282 Automatización Industrial [Electiva] Requisitos: Programa Semestre: Ingeniería Industrial Período académico: 2016-2
FACULTAD DE INGENIERÍA Departamento de Ingeniería Industrial Código Materia: Código: 05282 Automatización Industrial [Electiva] Requisitos: Programa Semestre: Ingeniería Industrial Período académico: 2016-2
Sesión II: Elementos de un Robot
 Sesión II: Elementos de un Robot Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Sesiones Robótica Comunidad de Madrid, UPSAM Abr, 2005 ÍNDICE Introducción Estructura mecánica Motores
Sesión II: Elementos de un Robot Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Sesiones Robótica Comunidad de Madrid, UPSAM Abr, 2005 ÍNDICE Introducción Estructura mecánica Motores
Percepción visual aplicada a la robótica
 Percepción visual aplicada a la robótica Mario I. Chacón Murguía Rafael Sandoval Rodríguez Javier Vega Pineda Selecciona el libro para empezar Capítulo 2 Teoría de robótica Continuar Cinemática de robots
Percepción visual aplicada a la robótica Mario I. Chacón Murguía Rafael Sandoval Rodríguez Javier Vega Pineda Selecciona el libro para empezar Capítulo 2 Teoría de robótica Continuar Cinemática de robots
Monitoreo y control de la posición angular de una cámara.
 Monitoreo y control de la posición angular de una cámara. Héctor Bonilla Barranco, Aarón E. López Luna, Daniel Ortiz Hernández, Ángel Bulmaro Sánchez Rubio Benemérita universidad autónoma de Puebla 4 Sur
Monitoreo y control de la posición angular de una cámara. Héctor Bonilla Barranco, Aarón E. López Luna, Daniel Ortiz Hernández, Ángel Bulmaro Sánchez Rubio Benemérita universidad autónoma de Puebla 4 Sur
Clasificación de robots. Clasificación de robots. Universidad Autónoma de Guerrero Unidad Académica de Ingeniería
 Clasificación de robots Introducción a la robótica Sesión 2: Locomoción Eric Rodríguez Peralta En la actualidad los más comunes son: Robots manipuladores Limitación para moverse en su entorno Robots móviles
Clasificación de robots Introducción a la robótica Sesión 2: Locomoción Eric Rodríguez Peralta En la actualidad los más comunes son: Robots manipuladores Limitación para moverse en su entorno Robots móviles
Fundamentos de Robótica
 Fundamentos de Robótica Introducción a la cinemática de manipuladores hamontesv@uaemex.mx http://scfi.uaemex.mx/hamontes 1 Recomendación No use estas diapositivas como referencia única de estudio durante
Fundamentos de Robótica Introducción a la cinemática de manipuladores hamontesv@uaemex.mx http://scfi.uaemex.mx/hamontes 1 Recomendación No use estas diapositivas como referencia única de estudio durante
DISEÑO Y CONSTRUCCIÓN DE UNA UNIDAD DE VIGILANCIA Y SEGURIDAD ROBÓTICA PARA ÁREAS RESTRINGIDAS DE LA ESCUELA TÉCNICA DE LA FUERZA AÉREA
 DISEÑO Y CONSTRUCCIÓN DE UNA UNIDAD DE VIGILANCIA Y SEGURIDAD ROBÓTICA PARA ÁREAS RESTRINGIDAS DE LA ESCUELA TÉCNICA DE LA FUERZA AÉREA INGENIERÍA MECATRÓNICA Autores: Diego Jerez Bunces Director: Ing.
DISEÑO Y CONSTRUCCIÓN DE UNA UNIDAD DE VIGILANCIA Y SEGURIDAD ROBÓTICA PARA ÁREAS RESTRINGIDAS DE LA ESCUELA TÉCNICA DE LA FUERZA AÉREA INGENIERÍA MECATRÓNICA Autores: Diego Jerez Bunces Director: Ing.
Actuadores eléctricos - Motores
 Servomotores Un servomotor es básicamente un actuador mecánico que contine un motor eléctrico y un conjunto de engranajes que permiten multiplicar el torque del sistema final y tiene la capacidad de ser
Servomotores Un servomotor es básicamente un actuador mecánico que contine un motor eléctrico y un conjunto de engranajes que permiten multiplicar el torque del sistema final y tiene la capacidad de ser
Robótica en la Universidad
 Robótica en la Universidad Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Semana de la Ciencia, UPSAM
Robótica en la Universidad Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Semana de la Ciencia, UPSAM
EL BRAZO ROBOT SCORBOT-ER III
 CPÍTULO 2 EL RZO ROOT SCOROT-ER III En este capítulo se presenta una descripción de la maqueta del robot SCOROT-ER III, de las partes que lo componen y su función en dicha maqueta. 2.1 Introducción Se
CPÍTULO 2 EL RZO ROOT SCOROT-ER III En este capítulo se presenta una descripción de la maqueta del robot SCOROT-ER III, de las partes que lo componen y su función en dicha maqueta. 2.1 Introducción Se
SECRETARÍA DE EDUCACIÓN PÚBLICA TECNOLÓGICA NACIONAL DE MÉXICO INSTITUTIO TECNOLÓGICO DE VERACRUZ
 SECRETARÍA DE EDUCACIÓN PÚBLICA TECNOLÓGICA NACIONAL DE MÉXICO INSTITUTIO TECNOLÓGICO DE VERACRUZ Robótica Dr. José Antonio Garrido Natarén INGENIERÍA MECATRÓNICA Unidad 1 Morfología del robot 1.8 Grados
SECRETARÍA DE EDUCACIÓN PÚBLICA TECNOLÓGICA NACIONAL DE MÉXICO INSTITUTIO TECNOLÓGICO DE VERACRUZ Robótica Dr. José Antonio Garrido Natarén INGENIERÍA MECATRÓNICA Unidad 1 Morfología del robot 1.8 Grados
PRÁCTICAS DE ROBÓTICA INDUSTRIAL [ABB 140] Práctica 2: Integración del IRB 140 en un sistema flexible de fabricación
![PRÁCTICAS DE ROBÓTICA INDUSTRIAL [ABB 140] Práctica 2: Integración del IRB 140 en un sistema flexible de fabricación](/thumbs/50/26557913.jpg "PRÁCTICAS DE ROBÓTICA INDUSTRIAL [ABB 140] Práctica 2: Integración del IRB 140 en un sistema flexible de fabricación") PRÁCTICAS DE ROBÓTICA INDUSTRIAL [ABB 140] Práctica 2: Integración del IRB 140 en un sistema flexible de fabricación Practica 2: Enunciado: INTEGRACIÓN DEL ROBOT IRB 140 EN UNA LÍNEA DE PRODUCCIÓN La práctica
PRÁCTICAS DE ROBÓTICA INDUSTRIAL [ABB 140] Práctica 2: Integración del IRB 140 en un sistema flexible de fabricación Practica 2: Enunciado: INTEGRACIÓN DEL ROBOT IRB 140 EN UNA LÍNEA DE PRODUCCIÓN La práctica
TEMA 3. PROGRAMACIÓN DE ROBOTS ROBÓTICA
 TEMA 3. PROGRAMACIÓN DE ROBOTS ROBÓTICA ÍNDICE INTRODUCCIÓN ROBOCELL EJERCICIOS 2 Jon Legarreta / Raquel Martinez INTRODUCCIÓN: ON-LINE VS OFF-LINE Hasta hora hemos visto Definición del robot. Subsistemas:
TEMA 3. PROGRAMACIÓN DE ROBOTS ROBÓTICA ÍNDICE INTRODUCCIÓN ROBOCELL EJERCICIOS 2 Jon Legarreta / Raquel Martinez INTRODUCCIÓN: ON-LINE VS OFF-LINE Hasta hora hemos visto Definición del robot. Subsistemas:
Tecnología robótica. Tema 7.- Tarjeta controladora Arduino
 1. Elementos electrónicos. 2. Placa Arduino. Sus componentes. 3. Software de Arduino. 4. Características de programación en Arduino. 5. Proyectos con la tarjeta controladora Arduino. 1. Elementos electrónicos.
1. Elementos electrónicos. 2. Placa Arduino. Sus componentes. 3. Software de Arduino. 4. Características de programación en Arduino. 5. Proyectos con la tarjeta controladora Arduino. 1. Elementos electrónicos.
Ing. Fausto Acuña. Codirector: Ing. Marco Singaña. 19 de Agosto Latacunga 2015
 DISEÑO E IMPLEMENTACIÓN DEL SISTEMA DE CONTROL DEL TORSO DE UN INTÉRPRETE HUMANOIDE DE MÚLTIPLES GRADOS DE LIBERTAD PARA LA ENSEÑANZA DEL LENGUAJE DE SEÑAS BÁSICAS PARA NIÑOS CON DISCAPACIDAD AUDITIVA
DISEÑO E IMPLEMENTACIÓN DEL SISTEMA DE CONTROL DEL TORSO DE UN INTÉRPRETE HUMANOIDE DE MÚLTIPLES GRADOS DE LIBERTAD PARA LA ENSEÑANZA DEL LENGUAJE DE SEÑAS BÁSICAS PARA NIÑOS CON DISCAPACIDAD AUDITIVA
REPOTENCIACIÓN Y MODERNIZACIÓN DE UN MONTACARGAS ELÉCTRICO DE PASILLO ANGOSTO CON EXTENSOR MARCA CATERPILLAR PARA LA EMPRESA FAVAG
 REPOTENCIACIÓN Y MODERNIZACIÓN DE UN MONTACARGAS ELÉCTRICO DE PASILLO ANGOSTO CON EXTENSOR MARCA CATERPILLAR PARA LA EMPRESA FAVAG David Aguirre Xavier molina Índice 1 2 3 4 5 6 Introducción Características
REPOTENCIACIÓN Y MODERNIZACIÓN DE UN MONTACARGAS ELÉCTRICO DE PASILLO ANGOSTO CON EXTENSOR MARCA CATERPILLAR PARA LA EMPRESA FAVAG David Aguirre Xavier molina Índice 1 2 3 4 5 6 Introducción Características
GreenCore Solutions SRL
 GreenCore Solutions SRL Temario curso: Introducción Básica a la Robótica Presentado por: Índice de contenido Introducción Básica a la Robótica...3 Descripción del Curso...3 Metodología... 3 Duración...
GreenCore Solutions SRL Temario curso: Introducción Básica a la Robótica Presentado por: Índice de contenido Introducción Básica a la Robótica...3 Descripción del Curso...3 Metodología... 3 Duración...
4 Actuadores eléctricos. Alfaomega. Material Web. Arduino control de servomotores a pasos 2
 4 Actuadores eléctricos Capítulo Material Web Arduino control de servomotores a pasos 2 2 Actuadores eléctricos 4.1. 4.1 Arduino control de servomotores a pasos Un servomotor de pasos es un sistema formado
4 Actuadores eléctricos Capítulo Material Web Arduino control de servomotores a pasos 2 2 Actuadores eléctricos 4.1. 4.1 Arduino control de servomotores a pasos Un servomotor de pasos es un sistema formado
Robótica Industrial. ISA.- Ingeniería de Sistemas y Automática TEMA 2: MORFOLOGIA DEL ROBOT. ACTADORES Y SENSORES
 TEMA 2: MORFOLOGIA DEL ROBOT. ACTADORES Y SENSORES Robótica Industrial ISA.- Morfología del Robot 1. Estructura mecánica 2. Transmisiones y reductores 3. Actuadores 4. Sensores internos 5. Elementos terminales
TEMA 2: MORFOLOGIA DEL ROBOT. ACTADORES Y SENSORES Robótica Industrial ISA.- Morfología del Robot 1. Estructura mecánica 2. Transmisiones y reductores 3. Actuadores 4. Sensores internos 5. Elementos terminales
Luis Brito Nelson Quizhpe
 Luis Brito Nelson Quizhpe RS-232 EL objetivo general de este proyecto es obtener las coordenadas del objeto al cual esta instalado el acelerómetro, y así obtener una medición precisa del movimiento del
Luis Brito Nelson Quizhpe RS-232 EL objetivo general de este proyecto es obtener las coordenadas del objeto al cual esta instalado el acelerómetro, y así obtener una medición precisa del movimiento del
ROBOTICA por OLLERO BATURONE Editorial Marcombo. Foreword Prólogo Prefacio del autor
 ROBOTICA por OLLERO BATURONE Editorial Marcombo Foreword Prólogo Prefacio del autor CAPÍTULO 1. Introducción 1.1. Robótica 1.2. Esquema general del sistema robot 1.3. Robots manipuladores 1.3.1. Sistema
ROBOTICA por OLLERO BATURONE Editorial Marcombo Foreword Prólogo Prefacio del autor CAPÍTULO 1. Introducción 1.1. Robótica 1.2. Esquema general del sistema robot 1.3. Robots manipuladores 1.3.1. Sistema
Clasificación de los robots según la AFRI (Asociación Francesa de Robótica Industrial) Manipulador con control manual o telemando.
 Manipulador con control manual o telemando.") Tabla 1.1 Tipo A Clasificación de los robots según la AFRI (Asociación Francesa de Robótica Industrial) Manipulador con control manual o telemando. Tabla 1.1 Tipo A Tipo B Clasificación de los robots según
Tabla 1.1 Tipo A Clasificación de los robots según la AFRI (Asociación Francesa de Robótica Industrial) Manipulador con control manual o telemando. Tabla 1.1 Tipo A Tipo B Clasificación de los robots según
Sistema Robotizado de Configuración Múltiple Evolution III (EVO III y el EXPLORERBOT) INTRODUCCION
 INTRODUCCION") Sistema Robotizado de Configuración Múltiple Evolution III (EVO III y el EXPLORERBOT) INTRODUCCION Evolution III ( EVO III )es una plataforma didáctica conformada por dos robots : EVO III y un robot transportador
Sistema Robotizado de Configuración Múltiple Evolution III (EVO III y el EXPLORERBOT) INTRODUCCION Evolution III ( EVO III )es una plataforma didáctica conformada por dos robots : EVO III y un robot transportador
AR 12 L. Tutorial 12: Motor DC + Potenciómetro. Objetivo. Materiales
 12 L Tutorial 12: Motor DC + Potenciómetro Objetivo En esta práctica conoceremos los ya antes mencionados motores dc, y aprenderemos a usarlos mediante un driver para su óptimo funcionamiento, y lo combinaremos
12 L Tutorial 12: Motor DC + Potenciómetro Objetivo En esta práctica conoceremos los ya antes mencionados motores dc, y aprenderemos a usarlos mediante un driver para su óptimo funcionamiento, y lo combinaremos
VISUALINO Apuntes y Proyectos IV
 VISUALINO Apuntes y Proyectos IV por BY - SA - NC Servos (de rotación continua) Qué son los servos? Un servo es un motor de corriente continua especial; gracias a un sistema de engranajes reductores y
VISUALINO Apuntes y Proyectos IV por BY - SA - NC Servos (de rotación continua) Qué son los servos? Un servo es un motor de corriente continua especial; gracias a un sistema de engranajes reductores y
Robótica I ACF Participantes Comité para el Diseño de Especialidad de la DIET. Academia de Sistemas Digitales de la DIET
 1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica II Ingeniería Electrónica ACF - 080 2 8 2. HISTORIA DEL PROGRAMA. Lugar
1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica II Ingeniería Electrónica ACF - 080 2 8 2. HISTORIA DEL PROGRAMA. Lugar
CARRERA DE INGENIERÍA MECATRÓNICA
 CARRERA DE INGENIERÍA MECATRÓNICA DESARROLLO DE UN SISTEMA DE UBICACIÓN EN LA PLATAFORMA ROBÓTICA PARA EXTERIORES TELEOPERADA DEL LABORATORIO DE MANUFACTURA REALIZADO POR: GARZÓN JARAMILO PEDRO MIGUEL
CARRERA DE INGENIERÍA MECATRÓNICA DESARROLLO DE UN SISTEMA DE UBICACIÓN EN LA PLATAFORMA ROBÓTICA PARA EXTERIORES TELEOPERADA DEL LABORATORIO DE MANUFACTURA REALIZADO POR: GARZÓN JARAMILO PEDRO MIGUEL
Diseño de un Brazo Mecánico
 Diseño de un Brazo Mecánico Proyecto: Diseño de un brazo mecánico Fecha: 8 de Noviembre de 2000 Autor: TodoRobot Bibliografía: Robótica Práctica de Angulo Introducción: Este proyecto surge del reclamo
Diseño de un Brazo Mecánico Proyecto: Diseño de un brazo mecánico Fecha: 8 de Noviembre de 2000 Autor: TodoRobot Bibliografía: Robótica Práctica de Angulo Introducción: Este proyecto surge del reclamo
Cinemática de los manipuladores. Robótica
 Cinemática de los manipuladores Robótica Introducción Cinemática: Estudio del movimiento sin considerar las fuerzas que lo producen Propiedades geométricas y temporales Posición, velocidad, aceleración,
Cinemática de los manipuladores Robótica Introducción Cinemática: Estudio del movimiento sin considerar las fuerzas que lo producen Propiedades geométricas y temporales Posición, velocidad, aceleración,
OKY2002: Arduino Uno Genérico
 OKY2002: Arduino Uno Genérico Básico NIVEL DE ENTRADA Estas tarjetas y módulos son los ideales para iniciar a programar un microcontrolador y adentrarte al mundo de la tecnología. Descripción El OKI2002
OKY2002: Arduino Uno Genérico Básico NIVEL DE ENTRADA Estas tarjetas y módulos son los ideales para iniciar a programar un microcontrolador y adentrarte al mundo de la tecnología. Descripción El OKI2002
Tabla 4.1 Pines de conector DB50 de Scorbot-ER V Plus Motores Eje Motor Número de Pin Interfaz de Potencia 1 2Y (1) 2 3Y (1) 3 2Y (2) 4 4Y (2) 5
 2 3Y (1) 3 2Y (2) 4 4Y (2) 5") DISEÑO DE LA INTERFAZ ELECTRÓNICA.. CONFIGURACIÓN DEL CONECTOR DB0. El Scorbot viene provisto de fábrica de un conector DB0 el cual contiene el cableado hacia los elementos electrónicos del robot, en la
DISEÑO DE LA INTERFAZ ELECTRÓNICA.. CONFIGURACIÓN DEL CONECTOR DB0. El Scorbot viene provisto de fábrica de un conector DB0 el cual contiene el cableado hacia los elementos electrónicos del robot, en la
Mena Guevara José Gabriel Latacunga, 2014
 DISEÑO Y CONSTRUCCIÓN DE LA ESTRUCTURA DE UN BRAZO ROBÓTICO CON SEIS GRADOS DE LIBERTAD, APLICANDO INGENIERÍA INVERSA PARA LA UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE EXTENSIÓN LATACUNGA. Mena Guevara José
DISEÑO Y CONSTRUCCIÓN DE LA ESTRUCTURA DE UN BRAZO ROBÓTICO CON SEIS GRADOS DE LIBERTAD, APLICANDO INGENIERÍA INVERSA PARA LA UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE EXTENSIÓN LATACUNGA. Mena Guevara José
Cinemática del Robot
 Cinemática del Robot La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. En primer término, la cinemática se interesa por la descripción analítica del movimiento
Cinemática del Robot La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. En primer término, la cinemática se interesa por la descripción analítica del movimiento
Plataforma Mecánica y Sistema Motriz
 Bogota D.C Febrero de 26 Plataforma Mecánica y Sistema Motriz dcmidscrum9@gmail.com Descripción General Del Robot El insecto hexápodo, robot de propósito general, diseñado principalmente para exploración
Bogota D.C Febrero de 26 Plataforma Mecánica y Sistema Motriz dcmidscrum9@gmail.com Descripción General Del Robot El insecto hexápodo, robot de propósito general, diseñado principalmente para exploración
PROYECTO. MODELADO Y SIMULACIÓN DE UN SISTEMA DE
 PROYECTO. MODELADO Y SIMULACIÓN DE UN SISTEMA DE POSICIÓN DE UN MOTOR DE CORRIENTE CONTINUA INITE, S.C., no es responsable del contenido, de la veracidad de los datos, opiniones y acontecimientos vertidos
PROYECTO. MODELADO Y SIMULACIÓN DE UN SISTEMA DE POSICIÓN DE UN MOTOR DE CORRIENTE CONTINUA INITE, S.C., no es responsable del contenido, de la veracidad de los datos, opiniones y acontecimientos vertidos
Robótica Industrial. Puede aumentar la rentabilidad de mi empresa? 12/05/2017. La Robótica en los procesos industriales. Evolución de la industria
 Robótica Industrial Puede aumentar la rentabilidad de mi empresa? Ing. Alberto Kremer Evolución de la industria Automatización Robótica y TI Energía eléctrica Producción en cadena Hiperconectividad Internet
Robótica Industrial Puede aumentar la rentabilidad de mi empresa? Ing. Alberto Kremer Evolución de la industria Automatización Robótica y TI Energía eléctrica Producción en cadena Hiperconectividad Internet
Fundamentos de Robótica
 Fundamentos de Robótica Introducción hamontesv@uaemex.mx http://scfi.uaemex.mx/hamontes 26 August 2016 1 Qué es un Robot? Muchos dispositivos con grados variables de autonomía se les llama robots (tornos,
Fundamentos de Robótica Introducción hamontesv@uaemex.mx http://scfi.uaemex.mx/hamontes 26 August 2016 1 Qué es un Robot? Muchos dispositivos con grados variables de autonomía se les llama robots (tornos,
Anexo III. Programas
 Anexo III Programas 1 Programa de control de Disparo para el controlador de velocidad Para poder controlar el ángulo de disparo de los SCR s, es necesario que el Microcontrolador que en este caso un arduino
Anexo III Programas 1 Programa de control de Disparo para el controlador de velocidad Para poder controlar el ángulo de disparo de los SCR s, es necesario que el Microcontrolador que en este caso un arduino
AUTORES: RICAURTE CORREA NÉSTOR ANDRÉS SARZOSA ANTE DAVID DE JESÚS
 DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DIDÁCTICO DE INVERSOR MULTINIVEL EN CASCADA, MONOFÁSICO DE TRES ETAPAS PARA EL LABORATORIO DE CONTROL ELÉCTRICO ESPE LATACUNGA AUTORES: RICAURTE CORREA NÉSTOR ANDRÉS
DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DIDÁCTICO DE INVERSOR MULTINIVEL EN CASCADA, MONOFÁSICO DE TRES ETAPAS PARA EL LABORATORIO DE CONTROL ELÉCTRICO ESPE LATACUNGA AUTORES: RICAURTE CORREA NÉSTOR ANDRÉS
SUBSECRETARIA DE EDUCACIÓN SUPERIOR TECNOLÓGICO NACIONAL DE MEXICO INSTITUTO TECNOLOGICO DE VERACRUZ. Robótica
 SUBSECRETARIA DE EDUCACIÓN SUPERIOR TECNOLÓGICO NACIONAL DE MEXICO INSTITUTO TECNOLOGICO DE VERACRUZ Robótica PROGRAMACION DE ROBOTS TITULAR DE LA MATERIA DR. JOSÉ ANTONIO GARRIDO NATARÉN Veracruz Ver
SUBSECRETARIA DE EDUCACIÓN SUPERIOR TECNOLÓGICO NACIONAL DE MEXICO INSTITUTO TECNOLOGICO DE VERACRUZ Robótica PROGRAMACION DE ROBOTS TITULAR DE LA MATERIA DR. JOSÉ ANTONIO GARRIDO NATARÉN Veracruz Ver
PLAN DE ESTUDIOS 2008-II SÍLABO
 UNIVERSIDAD RICARDO PALMA FACULTAD DE INGENIERÍA I. INFORMACIÓN GENERAL: DEPARTAMENTO ACADÉMICO DE INGENIERÍA PLAN DE ESTUDIOS 2008-II SÍLABO 1.1 Asignatura : ROBÓTICA 1.2. Ciclo : VIII 1.3 Carrera Profesional
UNIVERSIDAD RICARDO PALMA FACULTAD DE INGENIERÍA I. INFORMACIÓN GENERAL: DEPARTAMENTO ACADÉMICO DE INGENIERÍA PLAN DE ESTUDIOS 2008-II SÍLABO 1.1 Asignatura : ROBÓTICA 1.2. Ciclo : VIII 1.3 Carrera Profesional
Sensor Analógico: Potenciómetro
 1.2.16. Sensor Analógico: Potenciómetro En esta actividad vamos a utilizar un potenciómetro como ejemplo de sensor analógico. Los potenciómetros son utilizados en multitud de aplicaciones, como por ejemplo
1.2.16. Sensor Analógico: Potenciómetro En esta actividad vamos a utilizar un potenciómetro como ejemplo de sensor analógico. Los potenciómetros son utilizados en multitud de aplicaciones, como por ejemplo
DISEÑO DE APLICACIONES ELECTRÓNICAS EN ARDUINO. Curso teórico-práctico, básico, de diseño de aplicaciones electrónicas en Arduino.
 DISEÑO DE APLICACIONES ELECTRÓNICAS EN ARDUINO Nombre de la actividad Curso teórico-práctico, básico, de diseño de aplicaciones electrónicas en Arduino. Nivel Básico. Público al cual va dirigido Dirigido
DISEÑO DE APLICACIONES ELECTRÓNICAS EN ARDUINO Nombre de la actividad Curso teórico-práctico, básico, de diseño de aplicaciones electrónicas en Arduino. Nivel Básico. Público al cual va dirigido Dirigido
CYBERTECH 2018 TALLER 03: MOTORES Y POTENCIA
 CYBERTECH 2018 TALLER 03: MOTORES Y POTENCIA MATERIALES Arduino Motor Shield LDR Pulsador Pila 9V Motor DC Resistencias Cables MOTORES DC La velocidad de giro depende de la tensión Necesitan una reductora
CYBERTECH 2018 TALLER 03: MOTORES Y POTENCIA MATERIALES Arduino Motor Shield LDR Pulsador Pila 9V Motor DC Resistencias Cables MOTORES DC La velocidad de giro depende de la tensión Necesitan una reductora
ENTORNO DE SIMULACIÓN Y CONTROL DE UN ROBOT VELOCISTA
 ENTORNO DE SIMULACIÓN Y CONTROL DE UN ROBOT VELOCISTA PROYECTO FIN DE CARRERA Departamento de Electrónica. Universidad de Alcalá. Ingeniería Técnica de Telecomunicación. Especialidad en Sistemas Electrónicos
ENTORNO DE SIMULACIÓN Y CONTROL DE UN ROBOT VELOCISTA PROYECTO FIN DE CARRERA Departamento de Electrónica. Universidad de Alcalá. Ingeniería Técnica de Telecomunicación. Especialidad en Sistemas Electrónicos
UNIVERSIDAD DE LAS FUERZAS ARMADAS-ESPE Extensión Latacunga. José Luis Zurita Pérez
 UNIVERSIDAD DE LAS FUERZAS ARMADAS-ESPE Extensión Latacunga José Luis Zurita Pérez DISEÑO E IMPLEMENTACIÓN DE UNA MÁQUINA AUTOMÁTICA CLASIFICADORA DE OBJETOS SEGÚN SU COLOR DETECTADOS MEDIANTE UN SENSOR
UNIVERSIDAD DE LAS FUERZAS ARMADAS-ESPE Extensión Latacunga José Luis Zurita Pérez DISEÑO E IMPLEMENTACIÓN DE UNA MÁQUINA AUTOMÁTICA CLASIFICADORA DE OBJETOS SEGÚN SU COLOR DETECTADOS MEDIANTE UN SENSOR
Jaramillo Monge, Manuel Dario
 Diseño e implementación de una estación de precalentamiento y centrifugación para la determinación del grado de asentamiento de sedimentos y agua (BS&W) del petróleo Jaramillo Monge, Manuel Dario Departamento
Diseño e implementación de una estación de precalentamiento y centrifugación para la determinación del grado de asentamiento de sedimentos y agua (BS&W) del petróleo Jaramillo Monge, Manuel Dario Departamento
El engrane más común de todos. Cuando una persona piensa en engranes, piensan en engranes de espuelas.
 Engranes Los engranes son unos elementos mecánicos con mucha utilidad. Nos sirven para transmitir un movimiento giratorio de un punto a otro, obtener ventaja mecánica de un movimiento, o para convertir
Engranes Los engranes son unos elementos mecánicos con mucha utilidad. Nos sirven para transmitir un movimiento giratorio de un punto a otro, obtener ventaja mecánica de un movimiento, o para convertir
Fundamentos para programación y robótica Módulo 2 Programación y robótica Capítulo 3 TortuBots y NXT
 Módulo 2 Programación y robótica Capítulo 3 Agenda Generalidades sobre el kit Lego NXT Conceptos básicos de Lego NXT Operando el NXT con TortuBots Objetivos Aprender sobre el kit y familiarizarse con el
Módulo 2 Programación y robótica Capítulo 3 Agenda Generalidades sobre el kit Lego NXT Conceptos básicos de Lego NXT Operando el NXT con TortuBots Objetivos Aprender sobre el kit y familiarizarse con el
INSTRUMENTACIÓN Y SEÑALES
 CAPÍTULO 4 DE CONTROL INSTRUMENTACIÓN Y SEÑALES En las siguientes páginas se describirán todos los elementos que se utilizaron para la comunicación entre el sistema mecánico y la computadora, el montado
CAPÍTULO 4 DE CONTROL INSTRUMENTACIÓN Y SEÑALES En las siguientes páginas se describirán todos los elementos que se utilizaron para la comunicación entre el sistema mecánico y la computadora, el montado
Escuela Secundaria Técnica 47 Juan de Dios Bátiz
 Escuela Secundaria Técnica 47 Juan de Dios Bátiz Brazo Robótico controlado por Arduino Integrantes: - Flores Vázquez Daniel Abraham - Gómez Varela Demian Job - Rivero Márquez Fernando Daniel - Valencia
Escuela Secundaria Técnica 47 Juan de Dios Bátiz Brazo Robótico controlado por Arduino Integrantes: - Flores Vázquez Daniel Abraham - Gómez Varela Demian Job - Rivero Márquez Fernando Daniel - Valencia
FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control LABORATORIO DE INSTRUMENTACIÓN INDUSTRIAL PRÁCTICA N 3
 FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control LABORATORIO DE INSTRUMENTACIÓN INDUSTRIAL 1. TEMA PRÁCTICA N 3 2. OBJETIVOS CONTROL DE MOTORES DC Y MOTORES A
FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control LABORATORIO DE INSTRUMENTACIÓN INDUSTRIAL 1. TEMA PRÁCTICA N 3 2. OBJETIVOS CONTROL DE MOTORES DC Y MOTORES A
Programación Arduino Con Visualino
 Programación Arduino Con Visualino Ponente: Ing. Patricio Tisalema ROBOTS FAMOSOS Y NO TAN FAMOSOS PERO SÍ CERCANOS QUÉ ES ROBOT? Es un sistema electro-mecánico que por su apariencia de movimientos, ofrece
Programación Arduino Con Visualino Ponente: Ing. Patricio Tisalema ROBOTS FAMOSOS Y NO TAN FAMOSOS PERO SÍ CERCANOS QUÉ ES ROBOT? Es un sistema electro-mecánico que por su apariencia de movimientos, ofrece
CONSTRUCCIÓN DE UN BRAZO ROBOT PARA SERVIR DE PLATAFORMA DE APRENDIZAJE
 CONSTRUCCIÓN DE UN BRAZO ROBOT PARA SERVIR DE PLATAFORMA DE APRENDIZAJE 1. Introducción Cadena, A. 1 ; Cortéz, D. 2 1. Centro de Visión y Robótica, 2. FIEC {acadena, dcortez}@fiec.espol.edu.ec En el presente
CONSTRUCCIÓN DE UN BRAZO ROBOT PARA SERVIR DE PLATAFORMA DE APRENDIZAJE 1. Introducción Cadena, A. 1 ; Cortéz, D. 2 1. Centro de Visión y Robótica, 2. FIEC {acadena, dcortez}@fiec.espol.edu.ec En el presente
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES
 INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE CONTROL DE ROBOTS PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno controlará las trayectorias de robots manipuladores
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE CONTROL DE ROBOTS PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno controlará las trayectorias de robots manipuladores
ANALISIS CINEMATICO DIRECTO E INVERSO
 ANALISIS CINEMATICO DIRECTO E INVERSO Cinematica directa x=f(q) [x,y,z] Articulaciones Posicion de la Herramienta Cinematica Inversa q=f -1 (x) El analisis cinematico inverso nos permite calcular la posicion
ANALISIS CINEMATICO DIRECTO E INVERSO Cinematica directa x=f(q) [x,y,z] Articulaciones Posicion de la Herramienta Cinematica Inversa q=f -1 (x) El analisis cinematico inverso nos permite calcular la posicion
Datos del alumno. Nombre: Saavedra Perea Omar Matricula: Correo electrónico: Firma. Datos de los asesores.
 Licenciatura en Ingeniería Mecánica. Nombre del Proyecto de Integración (PI): Implementación del control de movimiento para un Brazo Robot Cilíndrico. Modalidad: Proyecto Tecnológico Versión: Primera Trimestre
Licenciatura en Ingeniería Mecánica. Nombre del Proyecto de Integración (PI): Implementación del control de movimiento para un Brazo Robot Cilíndrico. Modalidad: Proyecto Tecnológico Versión: Primera Trimestre
PROGRAMA ARDUINO 2.0
 PROGRAMA ARDUINO 2.0 Programa Arduino 2.0 El uso de la robótica se está convirtiendo en la base de la industria contemporánea, y esto hace que sea cada vez más importante conocerla y saber cuál es su alcance.
PROGRAMA ARDUINO 2.0 Programa Arduino 2.0 El uso de la robótica se está convirtiendo en la base de la industria contemporánea, y esto hace que sea cada vez más importante conocerla y saber cuál es su alcance.
Examen de TEORIA DE MAQUINAS Diciembre 99 Nombre...
 Examen de TEORIA DE MAQUINAS Diciembre 99 Nombre... La figura muestra una leva de disco con seguidor de traslación, radial, de rodillo. La leva es un círculo de radio R=20 mm, articulado al elemento fijo
Examen de TEORIA DE MAQUINAS Diciembre 99 Nombre... La figura muestra una leva de disco con seguidor de traslación, radial, de rodillo. La leva es un círculo de radio R=20 mm, articulado al elemento fijo
Examen Ordinario de Automatización Industrial
 Examen Ordinario de Automatización Industrial 23 de mayo de 2013 Duración: 1 hora y 15 minutos - Se piden respuestas claras, breves y concisas. No son aceptables divagaciones y ambigüedades. - Consulta
Examen Ordinario de Automatización Industrial 23 de mayo de 2013 Duración: 1 hora y 15 minutos - Se piden respuestas claras, breves y concisas. No son aceptables divagaciones y ambigüedades. - Consulta
Para este tipo de programación que se realizó se puede concluir que funcionó de
 Capítulo 6: Pruebas y conclusiones 6.1 Pruebas Para este tipo de programación que se realizó se puede concluir que funcionó de manera adecuada ya que el móvil sube de nivel como se propuso. Con esto el
Capítulo 6: Pruebas y conclusiones 6.1 Pruebas Para este tipo de programación que se realizó se puede concluir que funcionó de manera adecuada ya que el móvil sube de nivel como se propuso. Con esto el
UNIVERSIDAD TECNOLÓGICA DE MÉXICO ELECTRÓNICA DE POTENCIA PRÁCTICA 1. MODULACIÓN POR ANCHO DE PULSO.
 UNIVERSIDAD TECNOLÓGICA DE MÉXICO ELECTRÓNICA DE POTENCIA PRÁCTICA 1. MODULACIÓN POR ANCHO DE PULSO. Objetivo: el alumno construirá con un amplificador operacional un sistema que varía el ancho de pulso
UNIVERSIDAD TECNOLÓGICA DE MÉXICO ELECTRÓNICA DE POTENCIA PRÁCTICA 1. MODULACIÓN POR ANCHO DE PULSO. Objetivo: el alumno construirá con un amplificador operacional un sistema que varía el ancho de pulso
Actualmente la automatización de procesos mecánicos, es un ámbito en
 Capítulo 1 Introducción: 1.1 Marco Teórico Actualmente la automatización de procesos mecánicos, es un ámbito en crecimiento, esto ha dado origen a la Mecatrónica, una disciplina que se enfoca a generar
Capítulo 1 Introducción: 1.1 Marco Teórico Actualmente la automatización de procesos mecánicos, es un ámbito en crecimiento, esto ha dado origen a la Mecatrónica, una disciplina que se enfoca a generar
Introducción al giroscopio.
 Introducción al giroscopio. Los giroscopios, o girómetros, son dispositivos que miden o mantienen el movimiento de rotación. MEMS (sistemas microelectromecánicos) giroscopios son pequeños sensores, de
Introducción al giroscopio. Los giroscopios, o girómetros, son dispositivos que miden o mantienen el movimiento de rotación. MEMS (sistemas microelectromecánicos) giroscopios son pequeños sensores, de
Pateador. una pelota. Pare ello se necesita de un actuador que mueva una estructura. mecánico similar a una pierna para que pueda patear la pelota.
 CAPÍTULO V 5.1.Introducción. Es indispensable que un robot que juega fútbol tenga la capacidad de golpear una pelota. Pare ello se necesita de un actuador que mueva una estructura mecánico similar a una
CAPÍTULO V 5.1.Introducción. Es indispensable que un robot que juega fútbol tenga la capacidad de golpear una pelota. Pare ello se necesita de un actuador que mueva una estructura mecánico similar a una
Contenido. Prefacio... Acerca de los autores...
 Contenido Prefacio... Acerca de los autores... xi xvi Capítulo 1. Introducción... 1 1.1. Antecedentes históricos... 2 1.2. Origen y desarrollo de la robótica... 8 1.3. Definición del Robot... 16 1.3.1.
Contenido Prefacio... Acerca de los autores... xi xvi Capítulo 1. Introducción... 1 1.1. Antecedentes históricos... 2 1.2. Origen y desarrollo de la robótica... 8 1.3. Definición del Robot... 16 1.3.1.
El hardware libre y el Internet de las cosas
 El hardware libre y el Internet de las cosas Gladstone Oliva Sistema de Universidad Virtual Universidad de Guadalajara Agosto 2015 Hardware libre o de fuentes abiertas Históricamente, las grandes empresas
El hardware libre y el Internet de las cosas Gladstone Oliva Sistema de Universidad Virtual Universidad de Guadalajara Agosto 2015 Hardware libre o de fuentes abiertas Históricamente, las grandes empresas
Universidad Nacional de San Juan
 Universidad Nacional de San Juan Facultad de Ingeniería Departamento de Electrónica, Automática y Bioingeniería Carrera de Bioingeniería Asignatura Biomecánica Unidad Nº 2: Biomecánica Postural Parte 1:
Universidad Nacional de San Juan Facultad de Ingeniería Departamento de Electrónica, Automática y Bioingeniería Carrera de Bioingeniería Asignatura Biomecánica Unidad Nº 2: Biomecánica Postural Parte 1:
Arquitectura de un Controlador Electrónico de Procesos
 Arquitectura de un Controlador Electrónico de Procesos Unidad Central de Procesamiento (CPU) La unidad central de procesamiento es el elemento más importante de un controlador electrónico de procesos.
Arquitectura de un Controlador Electrónico de Procesos Unidad Central de Procesamiento (CPU) La unidad central de procesamiento es el elemento más importante de un controlador electrónico de procesos.
Actuador mecatrónico
 Actuador mecatrónico Es un sistema dedicado a controlar el movimiento de un cuerpo que se debe trasladar controladamente de un estado inicial, P i (X i,y i,z i,t i,v i,a i ), a otro, P f (X f,y f,z f,t
Actuador mecatrónico Es un sistema dedicado a controlar el movimiento de un cuerpo que se debe trasladar controladamente de un estado inicial, P i (X i,y i,z i,t i,v i,a i ), a otro, P f (X f,y f,z f,t