Butiá. Agenda. Robótica educativa Objetivos Proyecto Butiá Conceptos sobre robótica Conceptos de programación Programando con TurtleBots
|
|
|
- José Manuel Godoy Belmonte
- hace 6 años
- Vistas:
Transcripción

1
2 Agenda Robótica educativa Objetivos Proyecto Conceptos sobre robótica Conceptos de programación Programando con TurtleBots
3 Robótica y educación La incorporación de los robots y de la inteligencia computacional se está dando de manera progresiva en nuestra sociedad, y es importante entonces contribuir a mejorar el conocimiento sobre estas tecnologías. Programar los comportamientos de un robot móvil despierta mucho interés en los jóvenes. Permite alcanzar resultados visuales inmediatos, así como se estimula la creatividad y el uso de conocimientos adquiridos en otras disciplinas o asignaturas. Permite el aprendizaje de conceptos básicos de programación.
4 Objetivos del proyecto Crear una plataforma simple y económica que permita a alumnos de liceos públicos interiorizarse con la programación del comportamiento de robots. Reducir la asimetría entre liceos públicos y privados en torno a la enseñanza de la informática, programación y robótica. A través de la robótica, transmitir a los profesores, estudiantes, y a sus familias, conocimientos básicos sobre las nuevas tecnologías y sus aplicaciones. Transformar la XO en un robot móvil.
5 Sobre el proyecto Desarrollo 2010 En el marco del sumo.uy, en 2010 se entregaron 27 plataformas robóticas para los liceos seleccionados por el CES. Se realizaron actividades de capacitación y talleres para estudiantes y profesores. Durante los meses de octubre y noviembre se realizaron visitas a los liceos del interior del país. Se propusieron y realizaron nuevos desafíos.

6 Robot en liceos de Uruguay.

7 Robots en área metropolitana

8
9 Sobre el proyecto Se continúan con talleres, capacitaciones y mantenimiento de los robots entregados. 34 jóvenes organizados en 9 equipos compitieron en la edición 2011 del sumo.uy. Colaboración con SUGAR LABS en lo que respecta al plugin, internalización de la paleta, actividad Butialo (IDE en Lua), plugin FollowMe.


10
11 Sobre el proyecto y trabajo a futuro... Disminuir costos. Tecnología nacional: USB4All. con elementos de desecho tecnológico. Portar a otros lenguajes grácos: Etoys. Mejorar aspectos constructivos: Compatibilidad con otros kits de robótica. Incluir más actuadores: brazo robótico. Difusion del conocimiento: Manuales, tutoriales online, audiovisuales, otros. Talleres de construcción. Enseñar a armar y programar robots. Más investigación y mantenimiento.


12
13 , mucho más que un robot Investigación Nuestro grupo (MINA) y estudiantes Educación Asignatura electiva en Facultad de Ingeniería "Butia: Robótica educativa" Extensión universitaria talleres en liceos, UTUs y escuelas soporte a usuarios de la plataforma
14 , mucho más que un robot Fomenta el desarrollo comunitario de la plataforma. Las soluciones abiertas permiten una experiencia educativa más rica. Entender como funcionan las cosas Mayor apropiación de la tecnología fomentando su modificación Buscamos que los estudiantes no sean simplemente usuarios de la plataforma, sino que desarrolladores Brinda independencia tecnológica, evitando realizar importaciones para acceder a un kit robótico.
15 Qué es un Robot? Un robot industrial es un manipulador multifuncional programable, capaz de mover materias, piezas, herramientas o dispositivos especiales, según trayectorias variables, programados para realizar tareas diversas [RIA2004]. Un robot inteligente es un robot del cual se espera que aprenda y ejecute tareas aún en ambientes cambiantes. Un robot inteligente es una máquina capaz de extraer información de su ambiente y usar ese conocimiento para moverse en forma segura cumpliendo un propósito y sentido [Arkin1998].
16 Características de Robot Programable: En algún lado, dentro o fuera del robot hay una computadora que lo controla. Extraer información: Para eso tiene sensores, que transforman magnitudes físicas en otras que el robot puede medir. Por ejemplo: cámaras, termómetros, micrófonos y botones. Moverse: Para eso controla motores. Estos son ejemplo de actuadores, que permiten interactuar con el ambiente del robot. Otros ejemplos de actuadores son: luces y parlantes
17 Sensores, Actuadores y Control Un robot recibe información sensorial a través de sus sensores y actúa sobre el medio utilizando sus actuadores o efectores. Percepciones A M B I E N T E Sensores? Actuadores Acciones

18 Actudadores: Motores Digitales (Ej. Dinamixel)

19 Sensores (1) Temperatura. Contacto capacitivo. Luz ambiente. Vibración.

20 Sensores (2) Inclinación. Escala de grises. Botón. Inducción magnética.
21 Cómo programar un robot? Mediante un programa que transforme lo sensado en acciones. A este tipo de programa lo llamamos comportamiento.
22 Cómo hacer programas? En la XO podemos hacer programas con algunas actividades como Etoys, Scratch, Tortuga o Pippy. Para programar el comportamiento del robot vamos a usar una versión de Bloques Tortuga modificado.

23 TortuBots En TortuBots, programamos con bloques.
24 Barras Barra de proyecto: Ver: Barra principal. Edición: Botones para ejecutar. Barra de paletas:
25 Paleta Bloque refrescar: permite re-colorear los bloques cuando se desconecta nuestro robot.

26 Actuadores Bloques: Adelante: Pone en marcha el robot hacia adelante. Atrás: Pone en marcha el robot hacia atrás. Izquierda: Pone en marcha el robot girando en sentido antihorario. Derecha: Pone en marcha el robot girando en sentido horario. Detener: Detiene el robot. Velocidad: Ajusta la velocidad de los motores entre 0 y Luz: Ajusta la intensidad del LED entre 0 y 255.


27 Sensores Bloques: Carga de batería: Devuelve la carga de la batería. Botón: Devuelve 1 si el botón está apretado, 0 si no. Escala de grises: Dice que tan pálido u oscuro es lo que ve. Es un valor entre 0 y Luz ambiente: Dice cuanta luz ve. Es un valor hasta 1023 Temperatura: Devuelve la temperatura en grados celsius. Distancia: Mide la distancia a uno de los sensores. Y otros...
28 Para empezar a programar...


29 Variables Una variable es un espacio de memoria de la máquina donde se pueden almacenar y consultar valores. En TortuBots son vistas como cajas.

30 Tipos de datos básicos Numéricos Cadenas de caracteres Lógicos / Booleanos



31 Expresiones Se pueden formar expresiones aplicando operadores a diferentes valores constantes, utilizando variables o el valor devuelto por un sensor. * Operadores matemáticos * Operadores relacionales * Operadores lógicos


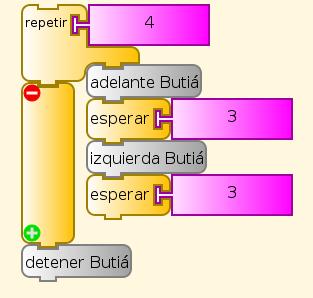
32 Secuencia de instrucciones Se encastran los bloques para generar una secuencia de instrucciones. Cual es el comportamiento de cada uno de estos programas?
33 Ejercicios 1.Mover ambos motores hacia adelante durante diez segundos. 2.Mover ambos motores en sentidos opuestos durante siete segundos. Nota: Para mover al robot debemos usar la paleta no la paleta Tortuga

34 Estructuras de control Son los bloques que nos permiten modificar el flujo de ejecución de una lista de bloques.
35 Condicionales Dependen del resultado de una expresión para elegir entre el flujo a seguir. condición condición verdadero falso verdadero bloque 1 bloque falso bloque 2

36 Si-entonces

37 Si-entonces-sino
38 Iteraciones Necesitamos repetir varias veces una misma operación. condición verdadero bloque falso

39 Mientras Repetir

40 Por siempre
41 Ejercicios 1. Dibujar un cuadrado. 2. Dibujar un triángulo. 3. Dibujar un hexágono. 4. Carreras hasta la meta (ida). 5. Carreras hasta la meta (ida y vuelta). Nota: Para mover al robot debemos usar la paleta no la paleta Tortuga
42 Ponerse en el lugar del robot
43 Desafío Realice un seguidor de líneas.

44 Preguntas? Contactos:
Proyecto Butia Facultad de Ingeniería - UDELAR
 Introducción al robot Butia Proyecto Butia Facultad de Ingeniería - UDELAR Contenido Descripción del proyecto El robot Butia. Objetivos del proyecto Crear una plataforma simple y económica que permita
Introducción al robot Butia Proyecto Butia Facultad de Ingeniería - UDELAR Contenido Descripción del proyecto El robot Butia. Objetivos del proyecto Crear una plataforma simple y económica que permita
Fundamentos para programación y robótica Módulo 2 Programación y robótica Capítulo 3 TortuBots y NXT
 Módulo 2 Programación y robótica Capítulo 3 Agenda Generalidades sobre el kit Lego NXT Conceptos básicos de Lego NXT Operando el NXT con TortuBots Objetivos Aprender sobre el kit y familiarizarse con el
Módulo 2 Programación y robótica Capítulo 3 Agenda Generalidades sobre el kit Lego NXT Conceptos básicos de Lego NXT Operando el NXT con TortuBots Objetivos Aprender sobre el kit y familiarizarse con el
Butia / XO. plataforma robótica educativa. Instituto de Computación Facultad de Ingeniería
 Butia / XO plataforma robótica educativa Instituto de Computación Facultad de Ingeniería Contenido Introducción robótica. Proyecto Butia. Presentación del curso. Definición de Robot Un robot industrial
Butia / XO plataforma robótica educativa Instituto de Computación Facultad de Ingeniería Contenido Introducción robótica. Proyecto Butia. Presentación del curso. Definición de Robot Un robot industrial
TURTLEBOTS Guía de uso Mayo 2017
 TURTLEBOTS Guía de uso Mayo 2017 Qué es Turtlebots? Turtlebots es un programa que nos permite realizar la programación de mecanismos robóticos, utilizando el método de bloques programables (como Scratch)
TURTLEBOTS Guía de uso Mayo 2017 Qué es Turtlebots? Turtlebots es un programa que nos permite realizar la programación de mecanismos robóticos, utilizando el método de bloques programables (como Scratch)
Fundamentos para programación y robótica. Fundamentos para programación y robótica Módulo 4+5 Robótica Capítulo 2 Proyectos y Robótica
 Fundamentos para programación y robótica Módulo 4+5 Robótica Capítulo 2 Proyectos y Robótica Agenda El método de proyectos aplicado a la robótica Parte2 Robótica: Sensores Caso de estudio: Desafío Butiá
Fundamentos para programación y robótica Módulo 4+5 Robótica Capítulo 2 Proyectos y Robótica Agenda El método de proyectos aplicado a la robótica Parte2 Robótica: Sensores Caso de estudio: Desafío Butiá
Manual de usuario. 1. Resumen. 2. Introducción 1. Qué es el robot Butiá? versión 1.0
 Manual de usuario. versión 1.0 Resumen Introducción Qué es el robot Butiá? Antes de programar el robot TurtleBots Qué es TurtleBots? Sugar Debian Otras Programando con TurtleBots El primer comportamiento
Manual de usuario. versión 1.0 Resumen Introducción Qué es el robot Butiá? Antes de programar el robot TurtleBots Qué es TurtleBots? Sugar Debian Otras Programando con TurtleBots El primer comportamiento
Un Lenguaje para Aprender a Programar Jugando
 Un Lenguaje para Aprender a Programar Jugando Ana Garis, Claudia Albornoz Proyecto de Extensión Estrategias creativas de resolución de problemas como un medio para facilitar la inserción de los individuos
Un Lenguaje para Aprender a Programar Jugando Ana Garis, Claudia Albornoz Proyecto de Extensión Estrategias creativas de resolución de problemas como un medio para facilitar la inserción de los individuos
ROBÓTICA EDUCATIVA INTRODUCCIÓN OBJETIVOS
 ROBÓTICA EDUCATIVA estructura; conocimientos de electricidad, para darle movilidad; conocimientos de electrónica, para comunicar al ordenador con el robot; y conocimientos de informática, para desarrollar
ROBÓTICA EDUCATIVA estructura; conocimientos de electricidad, para darle movilidad; conocimientos de electrónica, para comunicar al ordenador con el robot; y conocimientos de informática, para desarrollar
Programación Arduino Con Visualino
 Programación Arduino Con Visualino Ponente: Ing. Patricio Tisalema ROBOTS FAMOSOS Y NO TAN FAMOSOS PERO SÍ CERCANOS QUÉ ES ROBOT? Es un sistema electro-mecánico que por su apariencia de movimientos, ofrece
Programación Arduino Con Visualino Ponente: Ing. Patricio Tisalema ROBOTS FAMOSOS Y NO TAN FAMOSOS PERO SÍ CERCANOS QUÉ ES ROBOT? Es un sistema electro-mecánico que por su apariencia de movimientos, ofrece
PROGRAMA DE ESTUDIO. Nº de horas semanales 4 horas pedagógicas. Nº de sesiones 8 sesiones
 NOMBRE DEL TALLER TALLER I - ARDUINO Nº de horas semanales 4 horas pedagógicas Nº de sesiones 8 sesiones Objetivos del taller Al término del curso, el estudiante estará capacitado para: Explicar la importancia
NOMBRE DEL TALLER TALLER I - ARDUINO Nº de horas semanales 4 horas pedagógicas Nº de sesiones 8 sesiones Objetivos del taller Al término del curso, el estudiante estará capacitado para: Explicar la importancia
OBJETIVOS: CONTENIDO:
 DOCENTE FORMADOR: INTRODUCCIÓN: 1 Lic. ELÍAS RIVERA DÁVILA La Robótica Educativa es la generación de entornos de Aprendizaje basados principalmente en la iniciativa y la actividad de los estudiantes. Ellos
DOCENTE FORMADOR: INTRODUCCIÓN: 1 Lic. ELÍAS RIVERA DÁVILA La Robótica Educativa es la generación de entornos de Aprendizaje basados principalmente en la iniciativa y la actividad de los estudiantes. Ellos
Clasificacion de robots
 Clasificacion de robots Robot Industrial Robotica Industrial El campo de la robótica industrial puede definirse como el estudio, diseño y uso de robots para la ejecución de procesos industriales. Más formalmente,
Clasificacion de robots Robot Industrial Robotica Industrial El campo de la robótica industrial puede definirse como el estudio, diseño y uso de robots para la ejecución de procesos industriales. Más formalmente,
TUTORIAL DE TORTUGARTE
 TUTORIAL DE TORTUGARTE Introducción TortugArte es una actividad inspirada en LOGO. Es un lenguaje de programación. Sin embargo, y más importante, es un lenguaje para aprender. Es una herramienta útil para
TUTORIAL DE TORTUGARTE Introducción TortugArte es una actividad inspirada en LOGO. Es un lenguaje de programación. Sin embargo, y más importante, es un lenguaje para aprender. Es una herramienta útil para
Programando con Eventos y Acciones
 Fundamentos para programación y robótica Módulo 2 Programación y robótica Capítulo 4 Programando con Eventos y Acciones Agenda Analizar el comportamiento de los sensores. Programar ejemplos. Objetivos
Fundamentos para programación y robótica Módulo 2 Programación y robótica Capítulo 4 Programando con Eventos y Acciones Agenda Analizar el comportamiento de los sensores. Programar ejemplos. Objetivos
Robótica. Un robot...
 Robótica Un robot... La palabra robot está a la orden del día y muchas veces al escucharla nos imaginamos una máquina con forma humana que camina, habla, gesticula pero en realidad es algo mucho más sencillo.
Robótica Un robot... La palabra robot está a la orden del día y muchas veces al escucharla nos imaginamos una máquina con forma humana que camina, habla, gesticula pero en realidad es algo mucho más sencillo.
Se propone la realización de los siguientes talleres (varios niveles según edad):
:") Talleres 2016/2017 TALLERES 2016-17 Se propone la realización de los siguientes talleres (varios niveles según edad): Robótica Robótica + MINECRAFT Robótica + Electrónica divertida Creación de videojuegos
Talleres 2016/2017 TALLERES 2016-17 Se propone la realización de los siguientes talleres (varios niveles según edad): Robótica Robótica + MINECRAFT Robótica + Electrónica divertida Creación de videojuegos
Catálogo formativo de MakeProjects
 Catálogo formativo de MakeProjects https://www.makeprojects.es 1 Curso de introducción a la robótica educativa... 2 Curso de introducción a Arduino... 3 Curso de introducción a Raspberry Pi... 4 Curso
Catálogo formativo de MakeProjects https://www.makeprojects.es 1 Curso de introducción a la robótica educativa... 2 Curso de introducción a Arduino... 3 Curso de introducción a Raspberry Pi... 4 Curso
CURSO PROVINCIAL: INTRODUCCIÓN A LA ROBÓTICA CON ARDUINO. ROBÓTICA EDUCATIVA EducaBot. Manuel Hidalgo Díaz
 CURSO PROVINCIAL: INTRODUCCIÓN A LA ROBÓTICA CON ARDUINO ROBÓTICA EDUCATIVA EducaBot Manuel Hidalgo Díaz Enero 2011 ÍNDICE ROBÓTICA...3 ROBÓTICA EDUCATIVA...4 EducaBot...6 BIBLIOGRAFÍA...8 INTRODUCCIÓN
CURSO PROVINCIAL: INTRODUCCIÓN A LA ROBÓTICA CON ARDUINO ROBÓTICA EDUCATIVA EducaBot Manuel Hidalgo Díaz Enero 2011 ÍNDICE ROBÓTICA...3 ROBÓTICA EDUCATIVA...4 EducaBot...6 BIBLIOGRAFÍA...8 INTRODUCCIÓN
Robótica para niños y jóvenes
 Curso presencial Departamento de Electrónica Facultad de Ingeniería Intensidad horaria 44 horas (4 horas por sesión). Horarios Lunes a viernes de 8:00 a.m. a 12:00 p.m. Objetivos General Generar un espacio
Curso presencial Departamento de Electrónica Facultad de Ingeniería Intensidad horaria 44 horas (4 horas por sesión). Horarios Lunes a viernes de 8:00 a.m. a 12:00 p.m. Objetivos General Generar un espacio
TALLER DIAGRAMAS DE FLUJO EN LEGO MINDSTORMS
 TALLER DIAGRAMAS DE FLUJO EN LEGO MINDSTORMS Cuando se quiere realizar un programa bien pensado para solucionar problemas de robótica es necesario generar algoritmos que permitan llegar a soluciones hipotéticas
TALLER DIAGRAMAS DE FLUJO EN LEGO MINDSTORMS Cuando se quiere realizar un programa bien pensado para solucionar problemas de robótica es necesario generar algoritmos que permitan llegar a soluciones hipotéticas
PC-01 Introducción al Pensamiento Computacional
 Syllabus PC-01 PC-01 Descripción Este curso es una introducción al Pensamiento Computacional utilizando Scratch como lenguaje de programación. Scratch sirve para crear historias, juegos y aplicaciones
Syllabus PC-01 PC-01 Descripción Este curso es una introducción al Pensamiento Computacional utilizando Scratch como lenguaje de programación. Scratch sirve para crear historias, juegos y aplicaciones
Conocimientos que se desarrollan con la utilización del robot BEE-BOT
 ROBÓTICA EDUCATIVA La robótica educativa es un nuevo sistema de aprendizaje en el aula, que utiliza como herramienta de enseñanza diferentes robots adaptados al nivel educativo de los alumnos y alumnas.
ROBÓTICA EDUCATIVA La robótica educativa es un nuevo sistema de aprendizaje en el aula, que utiliza como herramienta de enseñanza diferentes robots adaptados al nivel educativo de los alumnos y alumnas.
Robótica aplicada con labview y lego
 Robótica aplicada con labview y lego Pedro Ponce Cruz Víctor M. de la Cueva Hernández Hiram Ponce Espinosa Selecciona la imagen para entrar Capítulo 1 Introducción a la robótica Continuar Introducción
Robótica aplicada con labview y lego Pedro Ponce Cruz Víctor M. de la Cueva Hernández Hiram Ponce Espinosa Selecciona la imagen para entrar Capítulo 1 Introducción a la robótica Continuar Introducción
ÍNDICE. Conceptos básicos de electrónica digital y analógica. Familiarización con el Kit Arduino UNO. Familiarización con el Kit Lego Mindstorm EV3
 La Robótica Educativa Objetivos generales Áreas de conocimiento Desarrollo de inteligencias Metodología Retos Recursos Contenidos Historia de la robótica ÍNDICE Conceptos básicos de electrónica digital
La Robótica Educativa Objetivos generales Áreas de conocimiento Desarrollo de inteligencias Metodología Retos Recursos Contenidos Historia de la robótica ÍNDICE Conceptos básicos de electrónica digital
AUTOMATISMOS Y ROBÓTICA
 TEMA 6 AUTOMATISMOS Y ROBÓTICA TECNOLOGÍA 4º ESO Samuel Escudero Melendo Puffing Billy, H.C. Booth (1901) Robot aspiradora (actualidad) Whirlwind, McGaffey (1868) QUÉ VEREMOS? APROXIMACIÓN HISTORICA ELEMENTOS
TEMA 6 AUTOMATISMOS Y ROBÓTICA TECNOLOGÍA 4º ESO Samuel Escudero Melendo Puffing Billy, H.C. Booth (1901) Robot aspiradora (actualidad) Whirlwind, McGaffey (1868) QUÉ VEREMOS? APROXIMACIÓN HISTORICA ELEMENTOS
CÓMO TRABAJAR CON MOWAY
 bring it to life QUÉ ES MOWAY? Moway es una herramienta educativa. Su objetivo es acercar el mundo de la robótica, tecnología y electrónica a los centros docentes. Es una solución completa de aprendizaje,
bring it to life QUÉ ES MOWAY? Moway es una herramienta educativa. Su objetivo es acercar el mundo de la robótica, tecnología y electrónica a los centros docentes. Es una solución completa de aprendizaje,
Robótica I ACB Participantes Comité para el Diseño de Especialidad de la DIET. Academia de Sistemas Digitales de la DIET
 1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica I Ingeniería Electrónica ACB - 0802 4 0 8 2. HISTORIA DEL PROGRAMA. Lugar
1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica I Ingeniería Electrónica ACB - 0802 4 0 8 2. HISTORIA DEL PROGRAMA. Lugar
PROYECTO 3. Robótica EV3 CORE
 PROYECTO 3 Robótica EV3 CORE Bienvenido estimado alumno Le damos la más cordial bienvenida al curso Robótica EV3 CORE, el cual se apoyará en nuestra plataforma virtual. El objetivo principal de este curso
PROYECTO 3 Robótica EV3 CORE Bienvenido estimado alumno Le damos la más cordial bienvenida al curso Robótica EV3 CORE, el cual se apoyará en nuestra plataforma virtual. El objetivo principal de este curso
Programa tu sistema de detección de incendios y cierre automático de puertas.
 Programa tu sistema de detección de incendios y cierre automático de puertas. En este proyecto crearás un sistema capaz de detectar posibles incendios utilizando un sensor IR, activando una alarma y accionando
Programa tu sistema de detección de incendios y cierre automático de puertas. En este proyecto crearás un sistema capaz de detectar posibles incendios utilizando un sensor IR, activando una alarma y accionando
UNIVERSIDAD AUTÓNOMA DEL ESTADO DE HIDALGO
 UNIVERSIDAD AUTÓNOMA DEL ESTADO DE HIDALGO UBICACIÓN DIVISIÓN DE DOCENCIA DIRECCIÓN DE PLANEACIÓN Y DESARROLLO EDUCATIVO PROGRAMA DE ESTUDIO LICENCIATURA EN: SISTEMAS COMPUTACIONALES (Nombre completo)
UNIVERSIDAD AUTÓNOMA DEL ESTADO DE HIDALGO UBICACIÓN DIVISIÓN DE DOCENCIA DIRECCIÓN DE PLANEACIÓN Y DESARROLLO EDUCATIVO PROGRAMA DE ESTUDIO LICENCIATURA EN: SISTEMAS COMPUTACIONALES (Nombre completo)
GreenCore Solutions SRL
 GreenCore Solutions SRL Temario curso: Introducción Básica a la Robótica Presentado por: Índice de contenido Introducción Básica a la Robótica...3 Descripción del Curso...3 Metodología... 3 Duración...
GreenCore Solutions SRL Temario curso: Introducción Básica a la Robótica Presentado por: Índice de contenido Introducción Básica a la Robótica...3 Descripción del Curso...3 Metodología... 3 Duración...
Programando la aplicación para tomar decisiones: Bloques condicionales
 Fuente: www.appinventor.org Traducción hecha con Google Traductor y mejorada por mi: piatticarlos@gmail.com Programando la aplicación para tomar decisiones: Bloques condicionales Las computadoras, incluso
Fuente: www.appinventor.org Traducción hecha con Google Traductor y mejorada por mi: piatticarlos@gmail.com Programando la aplicación para tomar decisiones: Bloques condicionales Las computadoras, incluso
Expositor: Mauricio Galvez Legua
 ó Expositor: Mauricio Galvez Legua mgl10may62@hotmail.com 1 Qué es la ó La Robótica es una ciencia aplicada que se ocupa del estudio, desarrollo y aplicaciones de los robots. El estudio de la robótica
ó Expositor: Mauricio Galvez Legua mgl10may62@hotmail.com 1 Qué es la ó La Robótica es una ciencia aplicada que se ocupa del estudio, desarrollo y aplicaciones de los robots. El estudio de la robótica
Índice de contenidos
 Índice de contenidos 1) Descripción 2) Objetivos generales 3) Scratch 4) Materiales creados 5) Manual del alumno/a 6) Criterios didácticos 7) Para saber más Videojuegos y robots Descripción Descripción
Índice de contenidos 1) Descripción 2) Objetivos generales 3) Scratch 4) Materiales creados 5) Manual del alumno/a 6) Criterios didácticos 7) Para saber más Videojuegos y robots Descripción Descripción
Programación de Robots. CI-2657 Robótica M.Sc. Kryscia Ramírez Benavides
 M.Sc. Kryscia Ramírez Benavides Introducción a Robótica Introducción a Robótica Generación de Comportamiento 2 Generar Comportamiento es Programar La existencia de robots que realicen autónomamente tareas
M.Sc. Kryscia Ramírez Benavides Introducción a Robótica Introducción a Robótica Generación de Comportamiento 2 Generar Comportamiento es Programar La existencia de robots que realicen autónomamente tareas
UNIVERSIDAD TECNOLÓGICA DE PEREIRA FACULTAD DE CIENCIAS BÁSICAS DEPARTAMENTO DE MATEMÁTICAS PROGRAMACIÓN DE COMPUTADORES
 UNIVERSIDAD TECNOLÓGICA DE PEREIRA FACULTAD DE CIENCIAS BÁSICAS DEPARTAMENTO DE MATEMÁTICAS 1. IDENTIFICACIÓN DE LA ASIGNATURA. NOMBRE: PROGRAMACIÓN DE COMPUTADORES CÓDIGO: CB323-4 ÁREA: FUNDAMENTACIÓN
UNIVERSIDAD TECNOLÓGICA DE PEREIRA FACULTAD DE CIENCIAS BÁSICAS DEPARTAMENTO DE MATEMÁTICAS 1. IDENTIFICACIÓN DE LA ASIGNATURA. NOMBRE: PROGRAMACIÓN DE COMPUTADORES CÓDIGO: CB323-4 ÁREA: FUNDAMENTACIÓN
Práctica 14 Movimiento del robot Fanuc M16i usando el método JOINT
 Práctica 14 Movimiento del robot Fanuc M16i usando el método JOINT Objetivo Conocimiento sobre el robot FANUC M16i e interactuar con él, por medio del método de movimiento JOINT. Preguntas detonantes 1)
Práctica 14 Movimiento del robot Fanuc M16i usando el método JOINT Objetivo Conocimiento sobre el robot FANUC M16i e interactuar con él, por medio del método de movimiento JOINT. Preguntas detonantes 1)
Software Software de de Control y Automatización WeDo
 Robótica Educativa WeDo Materiales Didácticos Tecnológicos Multidisciplinarios Software Software de de Control y Automatización WeDo El software Robótica WeDo se utiliza para crear programas arrastrando
Robótica Educativa WeDo Materiales Didácticos Tecnológicos Multidisciplinarios Software Software de de Control y Automatización WeDo El software Robótica WeDo se utiliza para crear programas arrastrando
P R O G R A M A D E R O B Ó T I C A E N LA UOM
 P R O G R A M A D E R O B Ó T I C A E N LA UOM E S T E D O C U M E N T O M U E S T R A E L P RO G R A M A S I N T E T I C O D E L A E N S E Ñ A N Z A D E R O B Ó T I C A QU E E S L A M E J O R O P O R
P R O G R A M A D E R O B Ó T I C A E N LA UOM E S T E D O C U M E N T O M U E S T R A E L P RO G R A M A S I N T E T I C O D E L A E N S E Ñ A N Z A D E R O B Ó T I C A QU E E S L A M E J O R O P O R
Robótica Mecanización, Automatización y Robotización Robótica y robots... 3
 Robótica... 2 Mecanización, Automatización y Robotización... 2 Robótica y robots... 3 Definiciones de robot... 3 Funcionamiento de un robot... 4 Entradas o Sensores... 5 Salidas o actuadores... 6 Realimentación...
Robótica... 2 Mecanización, Automatización y Robotización... 2 Robótica y robots... 3 Definiciones de robot... 3 Funcionamiento de un robot... 4 Entradas o Sensores... 5 Salidas o actuadores... 6 Realimentación...
Extraescolares Tecnológicas
 Extraescolares Tecnológicas Contenidos Introducción 3 Niveles académicos 4 TecnoKids 6 TecnoLab 9 RoboLab 14 CodeLab 19 Nuestro compromiso 25 Nuestras instalaciones 27 Precios 28 Contacto 29 3 Introducción
Extraescolares Tecnológicas Contenidos Introducción 3 Niveles académicos 4 TecnoKids 6 TecnoLab 9 RoboLab 14 CodeLab 19 Nuestro compromiso 25 Nuestras instalaciones 27 Precios 28 Contacto 29 3 Introducción
TSTC. Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 1 INTRODUCCIÓN A LA ROBÓTICA
 Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 1 INTRODUCCIÓN A LA ROBÓTICA Secciones 1. Introducción y definiciones. 2. Visión General de la manipulación mecánica. 1. Posicionamiento y Cinemática
Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 1 INTRODUCCIÓN A LA ROBÓTICA Secciones 1. Introducción y definiciones. 2. Visión General de la manipulación mecánica. 1. Posicionamiento y Cinemática
SUBSECRETARIA DE EDUCACIÓN SUPERIOR TECNOLÓGICO NACIONAL DE MEXICO INSTITUTO TECNOLOGICO DE VERACRUZ. Robótica
 SUBSECRETARIA DE EDUCACIÓN SUPERIOR TECNOLÓGICO NACIONAL DE MEXICO INSTITUTO TECNOLOGICO DE VERACRUZ Robótica PROGRAMACION DE ROBOTS TITULAR DE LA MATERIA DR. JOSÉ ANTONIO GARRIDO NATARÉN Veracruz Ver
SUBSECRETARIA DE EDUCACIÓN SUPERIOR TECNOLÓGICO NACIONAL DE MEXICO INSTITUTO TECNOLOGICO DE VERACRUZ Robótica PROGRAMACION DE ROBOTS TITULAR DE LA MATERIA DR. JOSÉ ANTONIO GARRIDO NATARÉN Veracruz Ver
Servocontrolado, control de trayectoria. Gestual, textual. Industrial, medico, militar, entretenimiento
 1 ARQUITECTURA Androides, zoomórficos,móviles,poliarticulados NIVEL DE INTELIGENCIA Manejo manual, secuencia arreglada secuencia variable, control numérico, play back, inteligentes METODO DE CONTROL Servocontrolado,
1 ARQUITECTURA Androides, zoomórficos,móviles,poliarticulados NIVEL DE INTELIGENCIA Manejo manual, secuencia arreglada secuencia variable, control numérico, play back, inteligentes METODO DE CONTROL Servocontrolado,
GUIÓN DE PRÁCTICAS PARA EL ALUMNO
 GUIÓN DE PRÁCTICAS PARA EL ALUMNO Asignatura Curso Unidad didáctica Temática Tecnología 4º ESO CONTROL Y ROBÓTICA Robot Lego Mindstorms + Máquina de Rube Goldberg 10 PLANTEAMIENTO DEL PROBLEMA Una vez
GUIÓN DE PRÁCTICAS PARA EL ALUMNO Asignatura Curso Unidad didáctica Temática Tecnología 4º ESO CONTROL Y ROBÓTICA Robot Lego Mindstorms + Máquina de Rube Goldberg 10 PLANTEAMIENTO DEL PROBLEMA Una vez
Instituto Sagrado Corazón A-111
 PROGRAMA DE LA ASIGNATURA Asignatura: Educación Tecnológica Profesor/a: Daniel Cortés Rodríguez Curso: 1División: A, B, C y D Año lectivo: 2015 1 TRIMESTRE Unidad I: Los procesos como secuencias de operaciones
PROGRAMA DE LA ASIGNATURA Asignatura: Educación Tecnológica Profesor/a: Daniel Cortés Rodríguez Curso: 1División: A, B, C y D Año lectivo: 2015 1 TRIMESTRE Unidad I: Los procesos como secuencias de operaciones
Robopedia - 3 INTRODUCCION
 INTRODUCCION Robopedia es la Escuela de Robótica desarrollada por Green Hills Learning Center, cuyo objetivo es inspirar a los niños y niñas en el campo de la ingeniería a través de la robótica y las ciencias
INTRODUCCION Robopedia es la Escuela de Robótica desarrollada por Green Hills Learning Center, cuyo objetivo es inspirar a los niños y niñas en el campo de la ingeniería a través de la robótica y las ciencias
Robótica Embebida Edición 2015
 Robótica Embebida Edición 2015 Introducción a la IA y Robótica Grupo MINA Instituto de Computación Facultad de Ingeniería Contenido Introducción a la robótica Historia Definición Usos Ejemplos Inteligencia
Robótica Embebida Edición 2015 Introducción a la IA y Robótica Grupo MINA Instituto de Computación Facultad de Ingeniería Contenido Introducción a la robótica Historia Definición Usos Ejemplos Inteligencia
Propósito: Fomentar el desarrollo de habilidades digitales, a través del aprendizaje de un nuevo idioma. Día Actividad Orientaciones Recursos
 Eje: Habilidades Digitales. Proyecto: Duolingo. DÍA: LUNES A VIERNES. Duración: 1 hora. Nivel Educativo: Secundaria. Eje: Habilidades Digitales. Módulo: Tecnología - Idiomas. Propósito: Fomentar el desarrollo
Eje: Habilidades Digitales. Proyecto: Duolingo. DÍA: LUNES A VIERNES. Duración: 1 hora. Nivel Educativo: Secundaria. Eje: Habilidades Digitales. Módulo: Tecnología - Idiomas. Propósito: Fomentar el desarrollo
FACULTAD DE INGENIERÍA
 FACULTAD DE INGENIERÍA FORMACIÓN EN INGENIERÍA DE SOFTWARE Y BASES DE DATOS EN LOS ESTUDIANTES DE LA CARRERA DE ING. EN COMPUTACIÓN DE LA FI, UNAM EN EL PLAN DE ESTUDIOS 2015 MAYO, 2015 Porcentaje de alumnos
FACULTAD DE INGENIERÍA FORMACIÓN EN INGENIERÍA DE SOFTWARE Y BASES DE DATOS EN LOS ESTUDIANTES DE LA CARRERA DE ING. EN COMPUTACIÓN DE LA FI, UNAM EN EL PLAN DE ESTUDIOS 2015 MAYO, 2015 Porcentaje de alumnos
Programación. Clase 5 Alternativa Condicional. Universidad Nacional de Quilmes
 Programación Clase 5 Alternativa Condicional Universidad Nacional de Quilmes Ejercitamos un poco Ejercicio Queremos pintar todas las celdas un tablero de 5x5 de color negro, salvo aquellas que ya estén
Programación Clase 5 Alternativa Condicional Universidad Nacional de Quilmes Ejercitamos un poco Ejercicio Queremos pintar todas las celdas un tablero de 5x5 de color negro, salvo aquellas que ya estén
uitécnico SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA SISTEMAS DE MANUFACTURA FLEXIBLE
 uitécnico SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA SISTEMAS DE MANUFACTURA FLEXIBLE HOJA DE ASIGNATURA CON DESGLOSE DE UNIDADES TEMÁTICAS Pág. 1 de 21 1. Nombre de la asignatura Robótica 2. Competencias
uitécnico SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA SISTEMAS DE MANUFACTURA FLEXIBLE HOJA DE ASIGNATURA CON DESGLOSE DE UNIDADES TEMÁTICAS Pág. 1 de 21 1. Nombre de la asignatura Robótica 2. Competencias
Programa de Asignatura Programación Visual I
 Programa de Asignatura Programación Visual I Managua, Abril, 2013 1. DATOS GENERALES Nombre de la asignatura: Programación Visual I Código: Requisito / Correquisito: Carrera (s): Modalidad: Turno: Semestre:
Programa de Asignatura Programación Visual I Managua, Abril, 2013 1. DATOS GENERALES Nombre de la asignatura: Programación Visual I Código: Requisito / Correquisito: Carrera (s): Modalidad: Turno: Semestre:
PROGRAMA DE ESTUDIO. Nº de horas semanales 4 horas pedagógicas. Nº de sesiones 8 sesiones
 NOMBRE DEL TALLER TALLER II - ARDUINO Nº de horas semanales 4 horas pedagógicas Nº de sesiones 8 sesiones Objetivos del taller Al término del curso, el estudiante estará capacitado para: Explicar la importancia
NOMBRE DEL TALLER TALLER II - ARDUINO Nº de horas semanales 4 horas pedagógicas Nº de sesiones 8 sesiones Objetivos del taller Al término del curso, el estudiante estará capacitado para: Explicar la importancia
XEvents: Mejores Prácticas y Guía de Referencia Índice
 XEvents: Mejores Prácticas y Guía de Referencia Índice Prólogo Guía de buenas prácticas para programar con XEvents Descripción de la paleta básica de XEvents Obtener coordenada X del mouse Obtener coordenada
XEvents: Mejores Prácticas y Guía de Referencia Índice Prólogo Guía de buenas prácticas para programar con XEvents Descripción de la paleta básica de XEvents Obtener coordenada X del mouse Obtener coordenada
DATOS BÁSICOS DE LA MATERIA
 EXPERIENCIA PILOTO DE CRÉDITOS EUROPEOS. UNIVERSIDADES ANDALUZAS GUÍA DOCENTE PARTICULAR DE INGENIERO EN AUTOMÁTICA Y ELECTRÓNICA INDUSTRIAL FICHA DE MATERIAS DATOS BÁSICOS DE LA MATERIA NOMBRE: CONTROL
EXPERIENCIA PILOTO DE CRÉDITOS EUROPEOS. UNIVERSIDADES ANDALUZAS GUÍA DOCENTE PARTICULAR DE INGENIERO EN AUTOMÁTICA Y ELECTRÓNICA INDUSTRIAL FICHA DE MATERIAS DATOS BÁSICOS DE LA MATERIA NOMBRE: CONTROL
Robótica y Programación de Videojuegos
 Robótica y Programación de Videojuegos INTRODUCCIÓN Tech Robotic Education se formó con ánimo de introducir en la tecnología a niños y jóvenes, para que entendieran el proceso creativo que conlleva un
Robótica y Programación de Videojuegos INTRODUCCIÓN Tech Robotic Education se formó con ánimo de introducir en la tecnología a niños y jóvenes, para que entendieran el proceso creativo que conlleva un
Diplomado en Mecatrónica
 Diplomado en Mecatrónica Hoy en día muchos procesos y productos son considerados como mecatrónicos por su gran complejidad como por los componentes de que están integrados (mecánicos, eléctricos, electrónicos,
Diplomado en Mecatrónica Hoy en día muchos procesos y productos son considerados como mecatrónicos por su gran complejidad como por los componentes de que están integrados (mecánicos, eléctricos, electrónicos,
Área: INFORMÁTICA. Saber- Saber: Identificar DFD como herramienta para escribir los algoritmos de forma lógica.
 Guía No: 2 Subdirección de Educación Departamento de Educación Contratada Colegio CAFAM Bellavista CED GUIA DE APRENDIZAJE Docente: Luz del Carmen Barrera Área: INFORMÁTICA Fecha: II BIMESTRE 2014 Grado:
Guía No: 2 Subdirección de Educación Departamento de Educación Contratada Colegio CAFAM Bellavista CED GUIA DE APRENDIZAJE Docente: Luz del Carmen Barrera Área: INFORMÁTICA Fecha: II BIMESTRE 2014 Grado:
Es un programa educativo Los alumnos podrán desarrollar su creatividad
 Es un programa educativo en el cual los alumnos podrán desarrollar sus habilidades para resolver retos en equipo. El programa permite la que los alumnos descubran y pongan en práctica sus capacidades de
Es un programa educativo en el cual los alumnos podrán desarrollar sus habilidades para resolver retos en equipo. El programa permite la que los alumnos descubran y pongan en práctica sus capacidades de
RESUMEN EJECUTIVO 1. OBJETIVOS ACADÉMICOS. Son objetivos académicos y de gestión, medibles, cuantificables y realizables.
 RESUMEN EJECUTIVO 1. OBJETIVOS ACADÉMICOS Son objetivos académicos y de gestión, medibles, cuantificables y realizables. Mejorar el logro de las competencias, genéricas y específicas, del perfil al finalizar
RESUMEN EJECUTIVO 1. OBJETIVOS ACADÉMICOS Son objetivos académicos y de gestión, medibles, cuantificables y realizables. Mejorar el logro de las competencias, genéricas y específicas, del perfil al finalizar
Cómo abordamos la enseñanza de la programación?
 Cómo abordamos la enseñanza de la programación? Jornada para la mejora de las competencias docentes del profesorado de informática Joaquin López Sánchez-Montañés SUMARIO Programar desde la adolescencia
Cómo abordamos la enseñanza de la programación? Jornada para la mejora de las competencias docentes del profesorado de informática Joaquin López Sánchez-Montañés SUMARIO Programar desde la adolescencia
LENGUAJE DE PSEUDOCÓDIGO
 LENGUAJE DE PSEUDOCÓDIGO METODOLOGÍA DE LA PROGRAMACIÓN Ingeniería Informática Primer curso, segundo cuatrimestre Escuela Politécnica Superior de Córdoba Universidad de Córdoba 1 Contenido 1. Sentencias...
LENGUAJE DE PSEUDOCÓDIGO METODOLOGÍA DE LA PROGRAMACIÓN Ingeniería Informática Primer curso, segundo cuatrimestre Escuela Politécnica Superior de Córdoba Universidad de Córdoba 1 Contenido 1. Sentencias...
mblock y sus bloques de programación
 mblock y sus bloques de programación Introducción Los robots Makeblock se programan con el software propio de la compañía, llamado mblock. mblock es un software fácil de aprender y usar, ya que está pensado
mblock y sus bloques de programación Introducción Los robots Makeblock se programan con el software propio de la compañía, llamado mblock. mblock es un software fácil de aprender y usar, ya que está pensado
COLEGIO AGUSTINIANO CIUDAD SALITRE AREA DE TECNOLOGÍA E INFORMATICA GRADO OCTAVO PLANEACION PERIÓDICA SEGUNDO BIMESTRE
 COLEGIO AGUSTINIANO CIUDAD SALITRE AREA DE TECNOLOGÍA E INFORMATICA GRADO OCTAVO PLANEACION PERIÓDICA SEGUNDO BIMESTRE Logro Construye animaciones sencillas utilizando los bloques de programación de Scratch
COLEGIO AGUSTINIANO CIUDAD SALITRE AREA DE TECNOLOGÍA E INFORMATICA GRADO OCTAVO PLANEACION PERIÓDICA SEGUNDO BIMESTRE Logro Construye animaciones sencillas utilizando los bloques de programación de Scratch
Robótica con ladrillos LEGO
 Robótica con ladrillos LEGO José María Cañas Plaza jmplaza@gsyc.escet.urjc.es Abril 2003 Índice del curso 1 Índice del curso Introducción Elementos del kit Programación con código RCX Programación con
Robótica con ladrillos LEGO José María Cañas Plaza jmplaza@gsyc.escet.urjc.es Abril 2003 Índice del curso 1 Índice del curso Introducción Elementos del kit Programación con código RCX Programación con
Guía didáctica para profesores y maestros Itinerario de propuestas formativas para acompañar el Taller Robot Painter
 Guía didáctica para profesores y maestros Itinerario de propuestas formativas para acompañar el Taller Robot Painter Nivel Primario/Secundario Presentación Esta guía tiene como objetivo brindar al docente
Guía didáctica para profesores y maestros Itinerario de propuestas formativas para acompañar el Taller Robot Painter Nivel Primario/Secundario Presentación Esta guía tiene como objetivo brindar al docente
Catálogo de venta. Kits de robótica My Robot Time MRT LOGIX5 SMART SOLUTIONS
 Catálogo de venta Kits de robótica My Robot Time MRT 1 Dos líneas de productos Línea educativa: Kits orientados a cursos y talleres de robótica y programación, con manuales detallados (en inglés) para
Catálogo de venta Kits de robótica My Robot Time MRT 1 Dos líneas de productos Línea educativa: Kits orientados a cursos y talleres de robótica y programación, con manuales detallados (en inglés) para
Butiá: Robótica educativa en Uruguay.
 Butiá: Robótica educativa en Uruguay. Aylen Ricca 1, Rodrigo Dearmas 1 1 Facultad de Ingeniería Universidad de la República, Uruguay. {aricca,dearmas}@fing.edu.uy Resumen. El uso de robots como elemento
Butiá: Robótica educativa en Uruguay. Aylen Ricca 1, Rodrigo Dearmas 1 1 Facultad de Ingeniería Universidad de la República, Uruguay. {aricca,dearmas}@fing.edu.uy Resumen. El uso de robots como elemento
RIVC - Robótica Industrial y Visión por Computador
 Unidad responsable: Unidad que imparte: Curso: Titulación: Créditos ECTS: 2016 295 - EEBE - Escuela de Ingeniería de Barcelona Este 707 - ESAII - Departamento de Ingeniería de Sistemas, Automática e Informática
Unidad responsable: Unidad que imparte: Curso: Titulación: Créditos ECTS: 2016 295 - EEBE - Escuela de Ingeniería de Barcelona Este 707 - ESAII - Departamento de Ingeniería de Sistemas, Automática e Informática
Comienzo: lunes 26 de setiembre de 2016 Horarios: lunes y miércoles / martes y jueves de 19 a 22 horas
 Información General Comienzo: lunes 26 de setiembre de 2016 Horarios: lunes y miércoles / martes y jueves de 19 a 22 horas Duración: 10 semanas 2,5 meses Carga horaria total: 60 horas (20 clases de 3 horas)
Información General Comienzo: lunes 26 de setiembre de 2016 Horarios: lunes y miércoles / martes y jueves de 19 a 22 horas Duración: 10 semanas 2,5 meses Carga horaria total: 60 horas (20 clases de 3 horas)
ROBÓTICA AUTOMATIZACIÓN CONTROL
 ROBÓTICA AUTOMATIZACIÓN CONTROL 2017 RUC: 20600518845 +51 925 966 750 (bitel) informes@nfmrobotics.com ingenieria@nfmrobotics.com ventas@nfmrobotics.com capacitaciones@nfmrobotics.com www.nfmrobotics.com
ROBÓTICA AUTOMATIZACIÓN CONTROL 2017 RUC: 20600518845 +51 925 966 750 (bitel) informes@nfmrobotics.com ingenieria@nfmrobotics.com ventas@nfmrobotics.com capacitaciones@nfmrobotics.com www.nfmrobotics.com
Sistemas Sensoriales de un Robot Industrial. Prof. J. Milland, BSEE, MEM/EM
 Sistemas Sensoriales de un Robot Industrial Prof. J. Milland, BSEE, MEM/EM Su función es similar a la de nuestros sentidos, con el cual logramos luego de un proceso poder interactuar con nuestro medio,
Sistemas Sensoriales de un Robot Industrial Prof. J. Milland, BSEE, MEM/EM Su función es similar a la de nuestros sentidos, con el cual logramos luego de un proceso poder interactuar con nuestro medio,
UNIVERSIDAD AUTÓNOMA DEL ESTADO DE HIDALGO
 UNIVERSIDAD AUTÓNOMA DEL ESTADO DE HIDALGO UBICACIÓN DIVISIÓN DE DOCENCIA DIRECCIÓN DE PLANEACIÓN Y DESARROLLO EDUCATIVO PROGRAMA DE ESTUDIO LICENCIATURA EN: SISTEMAS COMPUTACIONALES (Nombre completo)
UNIVERSIDAD AUTÓNOMA DEL ESTADO DE HIDALGO UBICACIÓN DIVISIÓN DE DOCENCIA DIRECCIÓN DE PLANEACIÓN Y DESARROLLO EDUCATIVO PROGRAMA DE ESTUDIO LICENCIATURA EN: SISTEMAS COMPUTACIONALES (Nombre completo)
Sílabo ARDUINO Y SENSORES. Especialista en Robótica Arduino. (24 Horas) INSTITUTO DE EDUCACIÓN SUPERIOR TECNOLÓGICO PRIVADO COORDINACIÓN ACADÉMICA
 INSTITUTO DE EDUCACIÓN SUPERIOR TECNOLÓGICO PRIVADO COORDINACIÓN ACADÉMICA") Sílabo ARDUINO Y SENSORES Especialista en Robótica Arduino (24 Horas) IEST Privado COMPUTRONIC TECH. 1 I. DATOS ADMINISTRATIVOS CURSO CÓDIGO Arduino y Sensores. HORAS REQUISITOS 24 Horas (4 Teoría / 20
Sílabo ARDUINO Y SENSORES Especialista en Robótica Arduino (24 Horas) IEST Privado COMPUTRONIC TECH. 1 I. DATOS ADMINISTRATIVOS CURSO CÓDIGO Arduino y Sensores. HORAS REQUISITOS 24 Horas (4 Teoría / 20
Armando paso a paso para motores AX12.
 Armando paso a paso para motores AX12. versión 1.0 Lista de piezas Paso 1 Armado de rueda y motor Paso 2 Armado de chasis Paso 3 Armada de placa Paso 4 Montaje de chasis + motor + placa Paso 5 Pack y pilas
Armando paso a paso para motores AX12. versión 1.0 Lista de piezas Paso 1 Armado de rueda y motor Paso 2 Armado de chasis Paso 3 Armada de placa Paso 4 Montaje de chasis + motor + placa Paso 5 Pack y pilas
CIM Manufactura Integrada por Computadora INDICE
 INDICE CIM EN CONFIGURACIÓN BÁSICA CIM EN CONFIGURACIÓN AVANZADA CIM EN CONFIGURACIÓN COMPLETA DL CIM-A DL CIM-B DL CIM-C DL CIM-C DL CIM-A DL CIM-B NOTA: Se necesita un electro-compresor monofásico como
INDICE CIM EN CONFIGURACIÓN BÁSICA CIM EN CONFIGURACIÓN AVANZADA CIM EN CONFIGURACIÓN COMPLETA DL CIM-A DL CIM-B DL CIM-C DL CIM-C DL CIM-A DL CIM-B NOTA: Se necesita un electro-compresor monofásico como
Universidad Técnica Federico Santa María. Laboratorio de Métodos Computacionales en Arq.232 LIMPIAPARABRISAS. Ensamblaje y programación
 Laboratorio de Métodos Computacionales en Arq.232 LIMPIAPARABRISAS Ensamblaje y programación Fecha de Realización: miércoles 03 de octubre, 2012 Equipo: KLEE Integrantes: Carolina Aburto_ Katherine Cabezas_Camila
Laboratorio de Métodos Computacionales en Arq.232 LIMPIAPARABRISAS Ensamblaje y programación Fecha de Realización: miércoles 03 de octubre, 2012 Equipo: KLEE Integrantes: Carolina Aburto_ Katherine Cabezas_Camila
Campamentos moway. Prácticas propuestas.
 Campamentos moway.. www.moway-robot.com 1 Índice Enseñar prácticas ya hechas (10 minutos)...2 Explicación básica del robot moway (5 minutos)...2 Explicación básica del software MowayWorld (15 minutos)...2
Campamentos moway.. www.moway-robot.com 1 Índice Enseñar prácticas ya hechas (10 minutos)...2 Explicación básica del robot moway (5 minutos)...2 Explicación básica del software MowayWorld (15 minutos)...2
Descripción general del lienzo de programación
 Software de Control y Automatización WeDo El software Robótica WeDo se utiliza para crear programas arrastrando y soltando bloques en la pantalla del computador. Varios bloques controlan el motor, el sensor
Software de Control y Automatización WeDo El software Robótica WeDo se utiliza para crear programas arrastrando y soltando bloques en la pantalla del computador. Varios bloques controlan el motor, el sensor
Programa y construye tu sistema de iluminación de emergencia y de alarma accionada con pulsador.
 Programa y construye tu sistema de iluminación de emergencia y de alarma accionada con pulsador. En este proyecto crearás un sistema de iluminación de emergencia y de alarma que permitirá alertar a todos
Programa y construye tu sistema de iluminación de emergencia y de alarma accionada con pulsador. En este proyecto crearás un sistema de iluminación de emergencia y de alarma que permitirá alertar a todos
Introducción. Area de la Robótica
 Introducción Seminario de Modelo y Métodos Cuantitativos Teddy Alfaro O. Area de la Robótica Qué es un robot? En qué se utiliza la robótica Qué áreas involucra? Cómo lo relacionamos con la Informática
Introducción Seminario de Modelo y Métodos Cuantitativos Teddy Alfaro O. Area de la Robótica Qué es un robot? En qué se utiliza la robótica Qué áreas involucra? Cómo lo relacionamos con la Informática
AUTOMATISMOS ELÉCTRICOS: EL SEMÁFORO DE MI CALLE
 UNIDAD DIDÁCTICA: TAREA PROGRAMACIÓN Realizada por: Francisco Ignacio Limón Macías. GRUPO C AUTOMATISMOS ELÉCTRICOS: EL SEMÁFORO DE MI CALLE Resumen de la actividad (RELACIONADAS CON SCRATCH) La actividad
UNIDAD DIDÁCTICA: TAREA PROGRAMACIÓN Realizada por: Francisco Ignacio Limón Macías. GRUPO C AUTOMATISMOS ELÉCTRICOS: EL SEMÁFORO DE MI CALLE Resumen de la actividad (RELACIONADAS CON SCRATCH) La actividad
PROPUESTA DE INTEGRACIÓN DE CENTRO DE ROBÓTICA Y PROGRAMACIÓN
 PROPUESTA DE INTEGRACIÓN DE CENTRO DE ROBÓTICA Y PROGRAMACIÓN Propuesta orientativa centrada en los niveles de infantil, primaria y secundaria. Esta propuesta está pensada para un único grupo de alumnos.
PROPUESTA DE INTEGRACIÓN DE CENTRO DE ROBÓTICA Y PROGRAMACIÓN Propuesta orientativa centrada en los niveles de infantil, primaria y secundaria. Esta propuesta está pensada para un único grupo de alumnos.
Colegio Agustiniano Ciudad Salitre Área de Tecnología e Informática Guía de Apoyo 2017 Bimestre: III Grado: Cuarto Docente: Jorge Torres
 Colegio Agustiniano Ciudad Salitre Área de Tecnología e Informática Guía de Apoyo 2017 Bimestre: III Grado: Cuarto Docente: Jorge Torres UNIDAD TEMÁTICA: PROGRAMACION PARA NIÑOS Logro: Identifica las herramientas
Colegio Agustiniano Ciudad Salitre Área de Tecnología e Informática Guía de Apoyo 2017 Bimestre: III Grado: Cuarto Docente: Jorge Torres UNIDAD TEMÁTICA: PROGRAMACION PARA NIÑOS Logro: Identifica las herramientas
Catálogo de venta. Kits de robótica My Robot Time MRT. Logix5 Smart Solutions LOGIX5 SMART SOLUTIONS
 Catálogo de venta Kits de robótica My Robot Time MRT Logix5 Smart Solutions 1 Dos líneas de productos Línea educativa: Kits orientados a cursos y talleres de robótica y programación, con manuales detallados
Catálogo de venta Kits de robótica My Robot Time MRT Logix5 Smart Solutions 1 Dos líneas de productos Línea educativa: Kits orientados a cursos y talleres de robótica y programación, con manuales detallados
La plataforma Arduino y su programación en entornos gráficos
 La plataforma Arduino y su programación en entornos gráficos Luisa Fernanda García Vargas Flor Ángela Bravo Sánchez Agenda 1 Control de un robot 2 Qué es Arduino? 3 4 El uso de Arduino en robótica Programación
La plataforma Arduino y su programación en entornos gráficos Luisa Fernanda García Vargas Flor Ángela Bravo Sánchez Agenda 1 Control de un robot 2 Qué es Arduino? 3 4 El uso de Arduino en robótica Programación
Scratch. Parte 1. Elaborado por: Prof. Miguel Mejía C. Lógica de Programación Didáctica. Fácil y divertida
 Ejercicios Scratch Lógica de Programación Didáctica Fácil y divertida Parte 1 Elaborado por: Prof. Miguel Mejía C. Scratch es un lenguaje de programación que le facilita crear sus propias historias interactivas,
Ejercicios Scratch Lógica de Programación Didáctica Fácil y divertida Parte 1 Elaborado por: Prof. Miguel Mejía C. Scratch es un lenguaje de programación que le facilita crear sus propias historias interactivas,
CURSO VERANO MONTESSORI 2017
 CURSO VERANO MONTESSORI 2017 CURSO TECNOLÓGICO DE PROGRAMACIÓN Y ROBÓTICA EDUCATIVA PARA ALUMNOS DE 4º EP a 1º ESO Construye y vuela drones Fundamentos de la programación Informática, ofimática, mecanografía,
CURSO VERANO MONTESSORI 2017 CURSO TECNOLÓGICO DE PROGRAMACIÓN Y ROBÓTICA EDUCATIVA PARA ALUMNOS DE 4º EP a 1º ESO Construye y vuela drones Fundamentos de la programación Informática, ofimática, mecanografía,
Robótica I ACF Participantes Comité para el Diseño de Especialidad de la DIET. Academia de Sistemas Digitales de la DIET
 1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica II Ingeniería Electrónica ACF - 080 2 8 2. HISTORIA DEL PROGRAMA. Lugar
1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica II Ingeniería Electrónica ACF - 080 2 8 2. HISTORIA DEL PROGRAMA. Lugar
Tecnomatic-Systems.com
 CONTROLADOR: PKD1.7K GUÍA DEL USUARIO Tecnomatic-Systems.com CONTROLADOR: PKD1.7K Para el Operador 24VDC (voltios de corriente continua) de Puerta Abatible ADVERTENCIAS: Antes de realizar cualquier manipulación
CONTROLADOR: PKD1.7K GUÍA DEL USUARIO Tecnomatic-Systems.com CONTROLADOR: PKD1.7K Para el Operador 24VDC (voltios de corriente continua) de Puerta Abatible ADVERTENCIAS: Antes de realizar cualquier manipulación
Entorno docente con Arduino y Python para Educación Robótica en Secundaria
 Entorno docente con Arduino y Python para Educación Robótica en Secundaria Jose M a Cañas, Julio Vega, Francisco Pérez, Aitor Martínez jmplaza@gsyc.es Seminario sobre Pensamiento Computacional 20 enero
Entorno docente con Arduino y Python para Educación Robótica en Secundaria Jose M a Cañas, Julio Vega, Francisco Pérez, Aitor Martínez jmplaza@gsyc.es Seminario sobre Pensamiento Computacional 20 enero
Experiencia piloto de Robótica y Lego
 Experiencia piloto de Robótica y Lego Lic. Alicia Paniagua (Lic. Psicología, Prof. de Informática) Jornadas Internacionales TECTEA El mejor tipo de terapia es cuando el niño está tan divertido que no sabe
Experiencia piloto de Robótica y Lego Lic. Alicia Paniagua (Lic. Psicología, Prof. de Informática) Jornadas Internacionales TECTEA El mejor tipo de terapia es cuando el niño está tan divertido que no sabe
AUTOMATIZACIÓN INDUSTRIAL
 Universidad Carlos III de Madrid Departamento de Ingeniería de Sistemas y Automática AUTOMATIZACIÓN INDUSTRIAL Práctica 1 Introducción a los autómatas programables Marzo 2008 Ramiro Diez Automatización
Universidad Carlos III de Madrid Departamento de Ingeniería de Sistemas y Automática AUTOMATIZACIÓN INDUSTRIAL Práctica 1 Introducción a los autómatas programables Marzo 2008 Ramiro Diez Automatización
CONTENIDO. 2015 Innovación y Control de México S.A de C.V. Prohibida su reproducción Total o Parcial.
 Manual Programación Innovación y Control de México S.A de C.V. Tel. 01 (33) 3342-3780 / 3126-1739 ventas@inncomex.com.mx CONTENIDO Introducción.... 3 Programación.... 3 descargar e instalar arduino IDE...
Manual Programación Innovación y Control de México S.A de C.V. Tel. 01 (33) 3342-3780 / 3126-1739 ventas@inncomex.com.mx CONTENIDO Introducción.... 3 Programación.... 3 descargar e instalar arduino IDE...
Tema: Entorno a C# y Estructuras Secuenciales.
 Tema: Entorno a C# y Estructuras Secuenciales. Programación I, Guía 3 1 Facultad: Ingeniería Escuela: Ingeniería en Computación Asignatura: Programación I Objetivos Utilizar el entorno de programación
Tema: Entorno a C# y Estructuras Secuenciales. Programación I, Guía 3 1 Facultad: Ingeniería Escuela: Ingeniería en Computación Asignatura: Programación I Objetivos Utilizar el entorno de programación
CLUB DE INFORMÁTICA CONVENIO COMFAMA FUNDACIÓN EPM FORMULACIÓN DE PROYECTO I.E. ASIA IGNACIANA
 CLUB DE INFORMÁTICA CONVENIO COMFAMA FUNDACIÓN EPM FORMULACIÓN DE PROYECTO I.E. ASIA IGNACIANA PASO 1: PROBLEMA No aplicación del deber de los estudiantes para manejar correctamente las basuras dentro
CLUB DE INFORMÁTICA CONVENIO COMFAMA FUNDACIÓN EPM FORMULACIÓN DE PROYECTO I.E. ASIA IGNACIANA PASO 1: PROBLEMA No aplicación del deber de los estudiantes para manejar correctamente las basuras dentro
Es un conjunto de palabras y símbolos que permiten al usuario generar comandos e instrucciones para que la computadora los ejecute.
 Los problemas que se plantean en la vida diaria suelen ser resueltos mediante el uso de la capacidad intelectual y la habilidad manual del ser humano. La utilización de la computadora en la resolución
Los problemas que se plantean en la vida diaria suelen ser resueltos mediante el uso de la capacidad intelectual y la habilidad manual del ser humano. La utilización de la computadora en la resolución
A - Creación del joystick
 Con este proyecto vamos a ver el efecto de una máquina simple. Los alumnos deberán construir un coche al que le deberán colocar una rueda dentada para transmitir a las ruedas la fuerza del motor. Lo deberán
Con este proyecto vamos a ver el efecto de una máquina simple. Los alumnos deberán construir un coche al que le deberán colocar una rueda dentada para transmitir a las ruedas la fuerza del motor. Lo deberán
Manual de Usuario RoboticSAD. Universidad Pedagógica Nacional Licenciatura en Electrónica. Elaborado por: Yuli Marcela Marín Peña
 Manual de Usuario RoboticSAD Universidad Pedagógica Nacional Licenciatura en Electrónica Elaborado por: Yuli Marcela Marín Peña Manual de Usuario RoboticSAD RoboticSAD es un Software de Apoyo Didáctico
Manual de Usuario RoboticSAD Universidad Pedagógica Nacional Licenciatura en Electrónica Elaborado por: Yuli Marcela Marín Peña Manual de Usuario RoboticSAD RoboticSAD es un Software de Apoyo Didáctico