CONCEPTOS BASICOS DE MECANISMOS
|
|
|
- Carmelo Cárdenas Barbero
- hace 6 años
- Vistas:
Transcripción


1 CONCEPTOS BASICOS DE MECANISMOS


2 INTRODUCCION Las maquinas y los mecanismos fueron ideados desde el amanecer de la historia. Los antiguos egipcios aunque no conocían la rueda y polea, conocían el plano inclinado, la palanca y el rodador de troncos; y con ellos construyeron pirámides y monumentos. Mucho del diseño primitivo estuvo dirigido hacia aplicaciones militares como catapultas, aparatos para escalar, etc. Más adelante fue acuñado el término ingeniero civil para diferenciarlo del militar.


3 La ingeniería mecánica tuvo sus principios en el diseño de maquinas, a medida que las invenciones de la Revolución Industrial requerían soluciones más complicadas en problemas de control de movimiento. La teoría de los mecanismos y las maquinas es una ciencia aplicada que sirve para comprender las relaciones entre la geometría y los movimientos de las piezas de una maquina o un mecanismo, y las fuerzas que generan dichos movimientos.

4 DEFINICIONES PORQUE ESTUDIAR SOBRE MECANISMOS: Estudia los aspectos cinemáticos que ocurren en diseños mecánicos. MECANICA: es la ciencia que estudia el movimiento, las fuerzas y el tiempo. La mecánica se divide en estática y dinámica: ESTATICA: Estudia los cuerpos en reposo o estacionarios donde el tiempo no es un factor importante. DINAMICA: Estudia los sistemas que cambian con el tiempo ósea el tiempo es un factor importante (Euler).

5 LEONHAR EULER ( ) fue un matemático y físico suizo. Se trata del principal matemático del siglo XVIII y uno de los más grandes y prolíficos de todos los tiempos. Por su parte, Paul Euler era amigo de la familia Bernoulli, famosa familia de matemáticos entre los que destacaba Johann Bernoulli. Sufrió de estrabismo y cataratas por ultimo quedo ciego ; Muchos trabajos se los dictó a su hijo mayor. Esto incrementó el respeto que la comunidad científica ya tenía por él. Definió las funciones logarítmicas y exponenciales. Desarrolló el cálculo de números complejos, demostrando que tiene infinitos logaritmos. Resolvió el problema de los Puentes de Konigsberg. Introdujo los símbolos e, f(x), el sumatoria y la letra pi para dicho número (el honor a Pitágoras ya que era la inicial de su nombre). Clasificó las funciones y formuló el criterio para determinar sus propiedades. Elaboró e introdujo la integración doble. Descubrió el teorema de la composición de integrales elípticas. Dedujo la ecuación diferencial de la línea geodésica sobre una superficie. Introdujo la ecuación de la expansión volumétrica de los líquidos. Fue el padre de la Teoría de Gráficas. Amplió y perfeccionó la geometría plana y de sólidos. Demostró que podían conseguirse objetivos acromáticos de foco finito, asociando dos tipos de vidrios distintos.


6 Según Euler divide la dinámica en 2 basándose en el supuesto de cuerpos rígidos o sea que las deformaciones que ocurren a estos cuerpos son despreciables: CINEMÁTICA: estudia el movimiento sin importar las fuerzas que lo producen; ósea estudia a la posición, velocidad, aceleración de un cuerpo o un punto. CINETICA: estudia el movimiento pero también las fuerzas que los originan.

7 Franz Reuleaux ( ) Se le considera el padre de la cinemática, Su padre y abuelo fueron constructores de maquinaria y, desde pequeño, tuvo relación con ese mundo. Reuleaux pensaba que las máquinas podían ser reducidas a cadenas de elementos limitados en sus movimientos por componentes adyacentes de la cadena cinemática. Así, desarrolló un complejo método de notación simbólica para describir la topología de una gran variedad de mecanismos, mostrando cómo podría ser usada para clasificarlos e incluso para inventar nuevos mecanismos. Diseño 300 mecanismos simples a partir de mecanismos de 4 barras y implemento el concepto de manivela.
8 MAQUINA Y MECANISMO Según Reuleaux se define máquina y mecanismos como: MAQUINA: Combinación de cuerpos resistentes de tal manera que, las fuerzas mecánicas de la naturaleza se puedan encauzar para realizar un trabajo acompañadas de movimientos determinados MECANISMOS: combinación de cuerpos resistentes conectados por medio de articulaciones móviles para formar una cadena cinemática cerrada con un eslabón fijo, y cuyo propósito es transformar el movimiento. ESTRUCTURA: combinación de cuerpos rígidos conectados por medio de articulaciones pero cuyo propósito no es efectuar trabajo ni transformar un movimiento y cuya movilidad interna es nula ósea no posee movimientos relativos ente sus miembros. El propósito real de una maquina o un mecanismos es aprovechar los movimientos internos relativos para transmitir potencia o transformar movimientos.

9 ESLABON En la definición tanto de máquina como de mecanismo (según Reuleaux) se habla de una "combinación de cuerpos resistentes", estos cuerpos resistentes que son elementos constitutivos del mecanismo reciben, de forma genérica, el nombre de eslabones pudiendo adquirir nombres particulares dependiendo de la función que realicen.

10 PAR CINEMATICO Pero los eslabones deben estar unidos entre sí "por medio de articulaciones móviles" es decir de forma que se permita el movimiento relativo entre ellos. A estas uniones móviles de dos eslabones entre sí se las denomina pares cinemáticos o simplemente pares. Los pares se clasifican según la naturaleza del contacto en: 1. Pares superiores: El contacto es lineal o puntual. 2. Pares inferiores: El contacto es superficial. Dependiendo del tipo de movimiento relativo que permita un par entre dos eslabones se pueden clasificar los seis tipos de pares inferiores descritos por Reuleaux:

11 CLASIFICACION PAR DE ROTACION Sólo permite rotación relativa y por consiguiente un sólo grado de libertad.

12 PAR PRISMATICO Permite únicamente movimiento relativo de deslizamiento. También posee un único grado de libertad; la longitud del deslizamiento (el desplazamiento).

13 PAR DE TORNILLO O HELICOIDAL Permite los movimientos relativos de rotación y traslación aunque posee un sólo grado de libertad por estar los dos movimientos relacionados entre sí.

14 PAR CILINDRICO Permite la rotación angular y la traslación pero de forma independiente, por lo que posee dos grados de libertad.

15 PAR ESFERICO Posee tres grados de libertad, una rotación según cada uno de los ejes de coordenadas.


16 PAR PLANO Posee tres grados de libertad, dos correspondientes a los desplazamientos sobre el plano y uno al giro según un eje perpendicular al plano.

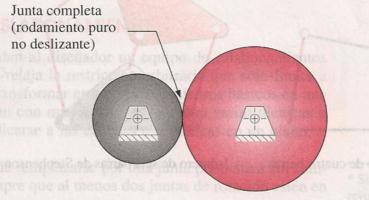
17 PARES SUPERIORES Par cinemático superior existe cuando el acoplamiento entre los dos cuerpos se realiza a través de una línea o de un punto. 1. El contacto de dos dientes engranando. 2. El seguidor con la leva. 3. Una rueda sobre un riel.
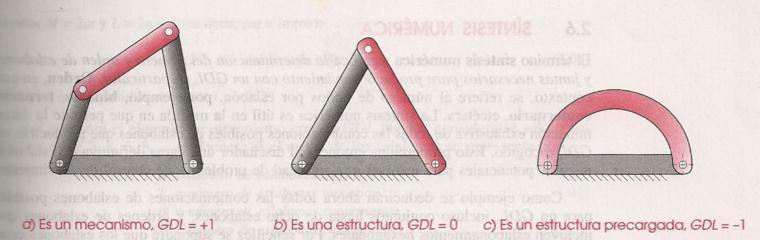
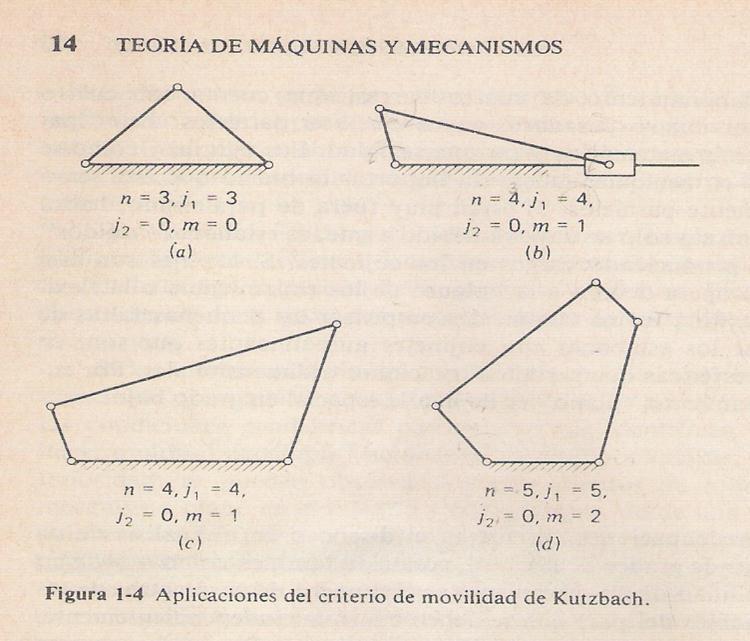
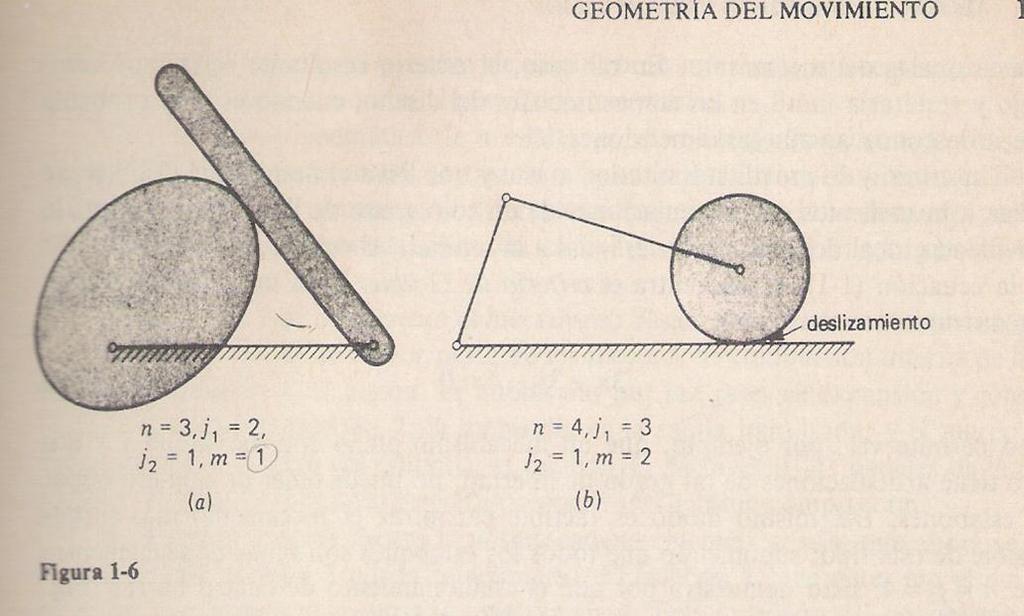
18 MOVILIDAD DE UN MECANISMO La movilidad de un mecanismos es el numero de parámetros de entrada que se deben controlar independientemente, con el fin de llevar el dispositivo a una posición en particular. M= 3(n-1)- 2j1-j2 plano M= 6 (n - 1) - 5 j1-4 j2-3 j3-2 j4 - j5 Espacial Criterio de kutzbach Es factible determinar la movilidad de un mecanismo directamente a través de un recuento del numero de eslabones y la cantidad y tipo de articulaciones que incluye.
19 Siendo: n = número de eslabones del mecanismo, j1 = números de pares que permiten un grado de libertad, j2 = número de pares que permiten dos grados de libertad, j3 = números de pares que permiten tres grados de libertad, j4 = número de pares que permiten cuatro grados de libertad y j5 = número de pares que permiten cinco grados de libertad. Cabe recordar que un eslabón o elemento en el plano tiene 3 grados de libertad cuando se mueve con respecto a un eslabón fijo. Pares de un solo grado de libertad Permiten un solo tipo de movimiento ( rotación o translación)
20 Par cinemático de dos grados de libertad Permite dos movimientos independientes a las vez con respecto a otro eslabón ( rota y se desplaza). LEY DE GRASHOF Para un eslabonamiento plano de cuatro barras, la suma de las longitudes más corta y más larga de los eslabones no puede ser mayor que la suma de las longitudes de los dos eslabones restantes, sí se desea que exista una rotación relativa continua entre dos elementos.
21 S + L P + Q

22 TABLA DE GRADOS DE LIBERTAD
23 MANIVELA Eslabón que efectúa una vuelta completa o una revolución, pivotado alrededor de un elemento fijo. BALANCIN O OSCILADOR Es un eslabón que realiza un movimiento oscilatorio, también con respecto a un elemento fijo. BIELA O ACOPLADOR Es un eslabón que tiene un movimiento complejo y no esta pivotado a un elemento fijo.
24 CICLO, PERIODO Y FASE DE UN MOVIMIENTO Cuando todas las partes de un mecanismo, después de pasar por todas las posiciones posibles, vuelven a sus posiciones relativas originales, se dice que se ha completado un ciclo de movimiento. El tiempo empleado en completar dicho ciclo, se denomina periodo. Las posiciones ocupadas por los elementos del mecanismo en cualquier instante del ciclo se denominan fases.

25 INVERSION DE UN MECANISMO Como ya se ha comentado, cuando se elige un eslabón fijo para una cadena cinemática, esta se transforma en un mecanismo. Si en vez de elegir un eslabón, se elige otro, el movimiento relativo entre los diferentes eslabones no se altera, pero el movimiento absoluto cambia drásticamente. El proceso de elegir como referencia (bancada) diferentes eslabones de una cadena cinemática se denomina inversión cinemática del mecanismo.
26 VENTAJA MECANICA En el cuadrilátero articulado, será la relación entre el par en el eslabón seguidor y el par en el eslabón impulsor. Esta ventaja mecánica es proporcional al seno del ángulo Gama formado por los eslabones seguidor y acoplador e inversamente proporcional al seno del ángulo β formado por los eslabones impulsor y acoplador.
27 Cuando el ángulo ß es 0º ó 180º, la ventaja mecánica se hace infinito. A estas posiciones del mecanismo se les llama posiciones de volquete y se corresponden con los límites de la oscilación del eslabón seguidor. Para lograr que la ventaja mecánica sea lo mayor posible, se debe procurar que ángulo Gama sea lo más próximo a 90º. Estas posiciones tienen una serie de ventajas como: Gran precisión de posición del eslabón seguidor, velocidad angular nula del seguidor y par nulo en el eslabón impulsor. GAMA MAXIMO Y MINIMO
28 PUNTOS MUERTOS En esta posición el mecanismos suele bloquearse o trabarse, común mente ocurre cuando el gama mínimo es menor de 45, esta posición se logra cuando el acoplador queda alineado con el oscilador; por esto se agrega al mecanismos un volante.
29 CURVAS DE UN ACOPLADOR Curvas del acoplador son las diferentes trayectorias que describen los puntos del plano considerándolos solidarios al eslabón acoplador. Estas curvas pueden variar desde una circunferencia que describe el punto del acoplador unido al extremo de la manivela, hasta un arco que describe el punto unido al extremo del seguidor, pasando por curvas parecidas a elipses.
30 MECANISMOS DE RETORNO RAPIDO Mecanismos de retorno rápido son aquellos en los que el tiempo invertido en la carrera de ida es diferente al invertido en la carrera de vuelta. La diferencia de tiempos entre la carrera de ida y la de retorno es debido a que, suponiendo la velocidad angular del eslabón de entrada constante, el eslabón de entrada debe recorrer un ángulo mayor durante la carrera de ida que durante la de retorno. Los tiempos invertidos en las carreras de ida y de retorno serán proporcionales a los ángulos girados por el eslabón de entrada durante esas carreras. Q = α β

31 EJEMPLOS DE MECANICMOS

32

33
34
CONCEPTOS BASICOS EN EL ESTUDIO DE MECANISMOS. Máquinas y mecanismos.
 CONCEPTOS BASICOS EN EL ESTUDIO DE MECANISMOS Máquinas y mecanismos. Reulaux define máquina como una "combinación de cuerpos resistentes de manera que, por medio de ellos, las fuerzas mecánicas de la naturaleza
CONCEPTOS BASICOS EN EL ESTUDIO DE MECANISMOS Máquinas y mecanismos. Reulaux define máquina como una "combinación de cuerpos resistentes de manera que, por medio de ellos, las fuerzas mecánicas de la naturaleza
Examen de TEORIA DE MAQUINAS Junio 07 Nombre...
 Examen de TEORIA DE MAQUINAS Junio 07 Nombre... La figura muestra un mecanismo biela-manivela. La manivela posee masa m y longitud L, la biela masa 3 m y longitud 3 L, y el bloque masa 2m. En la posición
Examen de TEORIA DE MAQUINAS Junio 07 Nombre... La figura muestra un mecanismo biela-manivela. La manivela posee masa m y longitud L, la biela masa 3 m y longitud 3 L, y el bloque masa 2m. En la posición
INDICE 1. Desigualdades 2. Relaciones, Funciones, Graficas 3. La Línea Recta 4. Introducción al Cálculo. Límites
 INDICE 1. Desigualdades 1 1. Desigualdades 1 2. Valor absoluto 8 3. Valor absoluto y desigualdades 11 2. Relaciones, Funciones, Graficas 16 1. Conjunto. Notación de conjuntos 16 2. El plano coordenado.
INDICE 1. Desigualdades 1 1. Desigualdades 1 2. Valor absoluto 8 3. Valor absoluto y desigualdades 11 2. Relaciones, Funciones, Graficas 16 1. Conjunto. Notación de conjuntos 16 2. El plano coordenado.
APUNTES DE FÍSICA I Profesor: José Fernando Pinto Parra UNIDAD 6 EQUILIBRIO DEL CUERPO RÍGIDO
 APUNTES DE FÍSICA I Profesor: José Fernando Pinto Parra UNIDAD 6 EQUILIBRIO DEL CUERPO RÍGIDO Cuerpo rígido Como ya se ha señalado, un cuerpo rígido, es aquel que no se deforman cuando es sometido a fuerzas
APUNTES DE FÍSICA I Profesor: José Fernando Pinto Parra UNIDAD 6 EQUILIBRIO DEL CUERPO RÍGIDO Cuerpo rígido Como ya se ha señalado, un cuerpo rígido, es aquel que no se deforman cuando es sometido a fuerzas
Y SISTEMASEleELE ELEMENTOS DE MÁQUINAS Y SISTEMAS
 Y SISTEMASEleELE ELEMENTOS DE MÁQUINAS Y SISTEMAS 1 Mecanismos y sistemas mecánicos Mecanismo Conjunto de elementos conectados entre sí por medio de articulaciones móviles cuya misión es: transformar una
Y SISTEMASEleELE ELEMENTOS DE MÁQUINAS Y SISTEMAS 1 Mecanismos y sistemas mecánicos Mecanismo Conjunto de elementos conectados entre sí por medio de articulaciones móviles cuya misión es: transformar una
UNIVERSIDAD NACIONAL DE EDUCACIÓN A DISTANCIA
 UNIVERSIDAD NACIONAL DE EDUCACIÓN A DISTANCIA NOMBRE... APELLIDOS... CALLE... POBLACIÓN... PROVINCIA... C. P.... SISTEMAS MECÁNICOS E.T.S. de Ingenieros Industriales PRUEBA DE EVALUACIÓN A DISTANCIA /
UNIVERSIDAD NACIONAL DE EDUCACIÓN A DISTANCIA NOMBRE... APELLIDOS... CALLE... POBLACIÓN... PROVINCIA... C. P.... SISTEMAS MECÁNICOS E.T.S. de Ingenieros Industriales PRUEBA DE EVALUACIÓN A DISTANCIA /
Examen de TEORIA DE MAQUINAS Diciembre 99 Nombre...
 Examen de TEORIA DE MAQUINAS Diciembre 99 Nombre... La figura muestra una leva de disco con seguidor de traslación, radial, de rodillo. La leva es un círculo de radio R=20 mm, articulado al elemento fijo
Examen de TEORIA DE MAQUINAS Diciembre 99 Nombre... La figura muestra una leva de disco con seguidor de traslación, radial, de rodillo. La leva es un círculo de radio R=20 mm, articulado al elemento fijo
Clasificación de robots. Clasificación de robots. Universidad Autónoma de Guerrero Unidad Académica de Ingeniería
 Clasificación de robots Introducción a la robótica Sesión 2: Locomoción Eric Rodríguez Peralta En la actualidad los más comunes son: Robots manipuladores Limitación para moverse en su entorno Robots móviles
Clasificación de robots Introducción a la robótica Sesión 2: Locomoción Eric Rodríguez Peralta En la actualidad los más comunes son: Robots manipuladores Limitación para moverse en su entorno Robots móviles
MOVIMIENTO CIRCULAR - MCU - MCUV MOVIMIENTO CIRCULAR - MCU - MCUV
 FISICA PREUNIERSITARIA MOIMIENTO CIRCULAR - MCU - MCU MOIMIENTO CIRCULAR - MCU - MCU CONCEPTO Es el movimiento de trayectoria circular en donde el valor de la velocidad del móvil se mantiene constante
FISICA PREUNIERSITARIA MOIMIENTO CIRCULAR - MCU - MCU MOIMIENTO CIRCULAR - MCU - MCU CONCEPTO Es el movimiento de trayectoria circular en donde el valor de la velocidad del móvil se mantiene constante
1. Palanca 2. Poleas: Polea simple o fija Polea móvil Polipastos
 1. Palanca 2. Poleas: Polea simple o fija Polea móvil Polipastos Una palanca es una máquina constituida por una barra simple que puede girar en torno a un punto de apoyo o fulcro. Según donde se aplique
1. Palanca 2. Poleas: Polea simple o fija Polea móvil Polipastos Una palanca es una máquina constituida por una barra simple que puede girar en torno a un punto de apoyo o fulcro. Según donde se aplique
MÁQUINAS SIMPLES UNIDAD 6
 MÁQUINAS SIMPLES UNIDAD 6 TECHNOLOGIES IES MIGUEL ESPINOSA 2013/2014 INDICE 1. INTRODUCCIÓN 2. LA POLEA 3. LA PALANCA 4. EL PLANO INCLINADO 5. EL TORNO 6. TRANSMISIÓN POR ENGRANAJE 7. TRANSMISIÓN POR CADENA
MÁQUINAS SIMPLES UNIDAD 6 TECHNOLOGIES IES MIGUEL ESPINOSA 2013/2014 INDICE 1. INTRODUCCIÓN 2. LA POLEA 3. LA PALANCA 4. EL PLANO INCLINADO 5. EL TORNO 6. TRANSMISIÓN POR ENGRANAJE 7. TRANSMISIÓN POR CADENA
Cinemática: parte de la Física que estudia el movimiento de los cuerpos.
 CINEMÁTICA Cinemática: parte de la Física que estudia el movimiento de los cuerpos. Movimiento: cambio de posición de un cuerpo respecto de un punto de referencia que se supone fijo. Objetivo del estudio
CINEMÁTICA Cinemática: parte de la Física que estudia el movimiento de los cuerpos. Movimiento: cambio de posición de un cuerpo respecto de un punto de referencia que se supone fijo. Objetivo del estudio
1 Máquina y mecanismo
 Máquina y mecanismo Máquina y mecanismo La teoría de máquinas y mecanismos (TMM) es una ciencia aplicada que trata de las relaciones entre la geometría y el movimiento de los elementos de una máquina o
Máquina y mecanismo Máquina y mecanismo La teoría de máquinas y mecanismos (TMM) es una ciencia aplicada que trata de las relaciones entre la geometría y el movimiento de los elementos de una máquina o
CINEMÁTICA: MOVIMIENTO CIRCULAR, CONCEPTOS BÁSICOS Y GRÁFICAS
 CINEMÁTICA: MOVIMIENTO CIRCULAR, CONCEPTOS BÁSICOS Y GRÁFICAS Un volante cuyo diámetro es de 3 m está girando a 120 r.p.m. Calcular: a) su frecuencia, b) el periodo, c) la velocidad angular, d) la velocidad
CINEMÁTICA: MOVIMIENTO CIRCULAR, CONCEPTOS BÁSICOS Y GRÁFICAS Un volante cuyo diámetro es de 3 m está girando a 120 r.p.m. Calcular: a) su frecuencia, b) el periodo, c) la velocidad angular, d) la velocidad
MOVIMIENTO ARMÓNICO SIMPLE
 MOVIMIENTO ARMÓNICO SIMPLE Junio 2016. Pregunta 2A.- Un bloque de 2 kg de masa, que descansa sobre una superficie horizontal, está unido a un extremo de un muelle de masa despreciable y constante elástica
MOVIMIENTO ARMÓNICO SIMPLE Junio 2016. Pregunta 2A.- Un bloque de 2 kg de masa, que descansa sobre una superficie horizontal, está unido a un extremo de un muelle de masa despreciable y constante elástica
TEORÍA DE MECANISMOS ANÁLISIS DE MECANISMOS POR ORDENADOR
 1/5 ANÁLISIS DE MECANISMOS POR ORDENADOR INTRODUCCIÓN En esta práctica se analizará cinemáticamente un determinado mecanismo plano empleando el método del cinema y se compararán los resultados obtenidos
1/5 ANÁLISIS DE MECANISMOS POR ORDENADOR INTRODUCCIÓN En esta práctica se analizará cinemáticamente un determinado mecanismo plano empleando el método del cinema y se compararán los resultados obtenidos
PROGRAMA DE ESTUDIO. Práctica ( ) Teórica ( X ) Presencial ( X ) Teórica-práctica ( ) Híbrida ( )
 Teórica ( X ) Presencial ( X ) Teórica-práctica ( ) Híbrida ( )") Nombre de la asignatura: MECANISMOS PROGRAMA DE ESTUDIO Clave: IME08 Ciclo Formativo: Básico ( ) Profesional ( X ) Especializado ( ) Fecha de elaboración: marzo 2015 Horas Semestre Horas semana Horas Teoría
Nombre de la asignatura: MECANISMOS PROGRAMA DE ESTUDIO Clave: IME08 Ciclo Formativo: Básico ( ) Profesional ( X ) Especializado ( ) Fecha de elaboración: marzo 2015 Horas Semestre Horas semana Horas Teoría
1º Tema.- Conceptos y definiciones en cinemática.
 Universidad de Huelva ESCUELA POLITECNICA SUPERIOR Departamento de Ingeniería Minera, Mecánica y Energética Asignatura: Ingeniería de Máquinas [570004027] 5º curso de Ingenieros Industriales 1º Tema.-
Universidad de Huelva ESCUELA POLITECNICA SUPERIOR Departamento de Ingeniería Minera, Mecánica y Energética Asignatura: Ingeniería de Máquinas [570004027] 5º curso de Ingenieros Industriales 1º Tema.-
Guia N 6 - Primer cuatrimestre de 2007 Sólidos rígidos planos. Energía potencial y mecánica.
 æ Mecánica CLásica Guia N 6 - Primer cuatrimestre de 2007 Sólidos rígidos planos. Energía potencial y mecánica. Problema 1: Dos barras delgadas uniformes de longitudes iguales, l=0.5 m, una de 4 kg y la
æ Mecánica CLásica Guia N 6 - Primer cuatrimestre de 2007 Sólidos rígidos planos. Energía potencial y mecánica. Problema 1: Dos barras delgadas uniformes de longitudes iguales, l=0.5 m, una de 4 kg y la
IX. Análisis dinámico de fuerzas
 Objetivos: IX. Análisis dinámico de fuerzas 1. Comprender la diferencia entre masa y peso. 2. Comprender como calcular el momento de masa de inercia de un objeto. 3. Recordar el teorema de ejes paralelos.
Objetivos: IX. Análisis dinámico de fuerzas 1. Comprender la diferencia entre masa y peso. 2. Comprender como calcular el momento de masa de inercia de un objeto. 3. Recordar el teorema de ejes paralelos.
CONCEPTO DE CINEMÁTICA: es el estudio del movimiento sin atender a las causas que lo producen
 CINEMÁTICA CONCEPTO DE CINEMÁTICA: es el estudio del movimiento sin atender a las causas que lo producen CONCEPTO DE MOVIMIENTO: el movimiento es el cambio de posición, de un cuerpo, con el tiempo (este
CINEMÁTICA CONCEPTO DE CINEMÁTICA: es el estudio del movimiento sin atender a las causas que lo producen CONCEPTO DE MOVIMIENTO: el movimiento es el cambio de posición, de un cuerpo, con el tiempo (este
2 o Bachillerato. Conceptos básicos
 Física 2 o Bachillerato Conceptos básicos Movimiento. Cambio de posición de un cuerpo respecto de un punto que se toma como referencia. Cinemática. Parte de la Física que estudia el movimiento de los cuerpos
Física 2 o Bachillerato Conceptos básicos Movimiento. Cambio de posición de un cuerpo respecto de un punto que se toma como referencia. Cinemática. Parte de la Física que estudia el movimiento de los cuerpos
MATEMÁTICAS GRADO DÉCIMO
 MATEMÁTICAS GRADO DÉCIMO SEGUNDA PARTE TEMA 1: VELOCIDAD ANGULAR Definición Velocidad Angular CONCEPTO: DEFINICIONES BÁSICAS: La velocidad angular es una medida de la velocidad de rotación. Se define como
MATEMÁTICAS GRADO DÉCIMO SEGUNDA PARTE TEMA 1: VELOCIDAD ANGULAR Definición Velocidad Angular CONCEPTO: DEFINICIONES BÁSICAS: La velocidad angular es una medida de la velocidad de rotación. Se define como
Mecánica para Robótica
 Mecánica para Robótica Material de clase: http://www.robotica-up.org/ Education Mechanics for Robotics Conceptos básicos de mecanismos y ensambles Cuerpo rígido (o sólido indeformable): Cuerpo o materia
Mecánica para Robótica Material de clase: http://www.robotica-up.org/ Education Mechanics for Robotics Conceptos básicos de mecanismos y ensambles Cuerpo rígido (o sólido indeformable): Cuerpo o materia
SÍNTESIS DE MECANISMOS Unidad 1. Mecanismos de máquina
 SÍNTESIS DE MECANISMOS Unidad 1. Mecanismos de máquina Los mecanismos de barras articuladas se caracterizan por que sus elementos rígidos se articulan entre sí para conformar una cadena cinemática con
SÍNTESIS DE MECANISMOS Unidad 1. Mecanismos de máquina Los mecanismos de barras articuladas se caracterizan por que sus elementos rígidos se articulan entre sí para conformar una cadena cinemática con
5 CINEMATICA DEL CUERPO RIGIDO EN MOVIMIENTO PLANO. Dr A A C. y(o ) x(o ) 5.1 INTRODUCCION
 x(o ) 5.1 INTRODUCCION") 5 CINEMTIC DEL CUERPO RIGIDO EN MOVIMIENTO PLNO 5.1 INTRODUCCION Cuerpo Rígido Sistema dinámico que no presenta deformaciones entre sus partes ante la acción de fuerzas. Matemáticamente, se define como
5 CINEMTIC DEL CUERPO RIGIDO EN MOVIMIENTO PLNO 5.1 INTRODUCCION Cuerpo Rígido Sistema dinámico que no presenta deformaciones entre sus partes ante la acción de fuerzas. Matemáticamente, se define como
VANESA PEÑA PAOLA PUCHIGAY 901
 VANESA PEÑA PAOLA PUCHIGAY 901 Por magnitud física entendemos cualquier propiedad de los cuerpos que se puede medir o cuantificar. Medir una magnitud física consiste en asignarle a esa magnitud un numero
VANESA PEÑA PAOLA PUCHIGAY 901 Por magnitud física entendemos cualquier propiedad de los cuerpos que se puede medir o cuantificar. Medir una magnitud física consiste en asignarle a esa magnitud un numero
MECANISMOS. Realizado por Carolina Rubio
 MECANISMOS Realizado por Carolina Rubio Maquinas 1. Trabajo 2. Potencia 3. Partes de un maquina Maquinas simples 1. Palanca 2. Plano inclinado 3. Tornillo 4. La rueda 5. La polea INDICE Mecanismos de transmisión
MECANISMOS Realizado por Carolina Rubio Maquinas 1. Trabajo 2. Potencia 3. Partes de un maquina Maquinas simples 1. Palanca 2. Plano inclinado 3. Tornillo 4. La rueda 5. La polea INDICE Mecanismos de transmisión
Clasificación de los mecanismos.
 MECANISMOS - II MECANISMOS. Son elementos destinados a trasmitir y transformar fuerzas y movimientos desde un elemento motriz (motor) a un elemento receptor. Permiten al ser humano realizar determinados
MECANISMOS - II MECANISMOS. Son elementos destinados a trasmitir y transformar fuerzas y movimientos desde un elemento motriz (motor) a un elemento receptor. Permiten al ser humano realizar determinados
QUÉ SON LOS MECANISMOS?
 QUÉ SON LOS MECANISMOS? Son elementos destinados a trasmitir y transformar fuerzas y movimientos desde un elemento motriz (motor) aun elemento receptor. Permiten realizar determinados trabajos con mayor
QUÉ SON LOS MECANISMOS? Son elementos destinados a trasmitir y transformar fuerzas y movimientos desde un elemento motriz (motor) aun elemento receptor. Permiten realizar determinados trabajos con mayor
TEORÍA DE MECANISMOS
 Hoja: 1/11 SÍNTESIS GENERAL DE MECANISMOS 1. INTRODUCCIÓN Con el análisis de un mecanismo se puede encontrar la respuesta de un sistema mecánico ante diversas solicitaciones. Permite hallar, por ejemplo,
Hoja: 1/11 SÍNTESIS GENERAL DE MECANISMOS 1. INTRODUCCIÓN Con el análisis de un mecanismo se puede encontrar la respuesta de un sistema mecánico ante diversas solicitaciones. Permite hallar, por ejemplo,
Mecanismo: Elemento destinado a transmitir y/o transformar las fuerzas o movimientos desde un elemento motriz (motor) hasta un elemento receptor.
 hasta un elemento receptor.") Mecanismo: Elemento destinado a transmitir y/o transformar las fuerzas o movimientos desde un elemento motriz (motor) hasta un elemento receptor. Finalidad: - Permiten realizar trabajos con mayor comodidad
Mecanismo: Elemento destinado a transmitir y/o transformar las fuerzas o movimientos desde un elemento motriz (motor) hasta un elemento receptor. Finalidad: - Permiten realizar trabajos con mayor comodidad
MECANISMOS Y MÁQUINAS SIMPLES
 MECANISMOS Y MÁQUINAS SIMPLES Los mecanismos y máquinas simples son dispositivos que se utilizan para reducir la cantidad de esfuerzo necesario para realizar diversas actividades o para transmitir y /
MECANISMOS Y MÁQUINAS SIMPLES Los mecanismos y máquinas simples son dispositivos que se utilizan para reducir la cantidad de esfuerzo necesario para realizar diversas actividades o para transmitir y /
Movimiento y Dinámica circular
 SECTOR CIENCIAS - FÍSICA TERCERO MEDIO 2011 Trabajo de Fábrica III MEDIO APREDIZAJES ESPERADOS - Aplicar las nociones físicas fundamentales para explicar y describir el movimiento circular; utilizar las
SECTOR CIENCIAS - FÍSICA TERCERO MEDIO 2011 Trabajo de Fábrica III MEDIO APREDIZAJES ESPERADOS - Aplicar las nociones físicas fundamentales para explicar y describir el movimiento circular; utilizar las
Dinámica. Carrera: MTM Participantes Representante de las academias de ingeniería Mecatrónica de los Institutos Tecnológicos.
 .- DATOS DE LA ASIGNATURA Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría-horas práctica-créditos: Dinámica Ingeniería Mecatrónica MTM-0 --.- HISTORIA DEL PROGRAMA Lugar y fecha
.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría-horas práctica-créditos: Dinámica Ingeniería Mecatrónica MTM-0 --.- HISTORIA DEL PROGRAMA Lugar y fecha
Mecánica de Fluidos. Análisis Diferencial
 Mecánica de Fluidos Análisis Diferencial Análisis Diferencial: Descripción y caracterización del flujo en función de la descripción de una partícula genérica del flujo. 1. Introducción 2. Movimiento de
Mecánica de Fluidos Análisis Diferencial Análisis Diferencial: Descripción y caracterización del flujo en función de la descripción de una partícula genérica del flujo. 1. Introducción 2. Movimiento de
Teoría de Máquinas y Mecanismos 2 o curso de Grado en Ingeniería de Tecnologías Industriales Curso
 Teoría de Máquinas y Mecanismos 2 o curso de Grado en Ingeniería de Tecnologías Industriales Curso 2015-2016 Segunda práctica de la asignatura: Ley de Grashof y ángulo de transmisión Introducción La segunda
Teoría de Máquinas y Mecanismos 2 o curso de Grado en Ingeniería de Tecnologías Industriales Curso 2015-2016 Segunda práctica de la asignatura: Ley de Grashof y ángulo de transmisión Introducción La segunda
Se denomina transmisión mecánica a un mecanismo encargado de trasmitir potencia entre dos o más elementos dentro de una máquina.
 Transmisión Mecánica Se denomina transmisión mecánica a un mecanismo encargado de trasmitir potencia entre dos o más elementos dentro de una máquina. Transmisión con correa en una instalación industrial.
Transmisión Mecánica Se denomina transmisión mecánica a un mecanismo encargado de trasmitir potencia entre dos o más elementos dentro de una máquina. Transmisión con correa en una instalación industrial.
Mecanismos y Elementos de Máquinas
 Mecanismos y Elementos de Máquinas Página 1 de 5 Programa de: Mecanismos y Elementos de Máquinas UNIVERSIDAD NACIONAL DE CÓRDOBA Facultad de Ciencias Exactas, Físicas y Naturales República Argentina Código:
Mecanismos y Elementos de Máquinas Página 1 de 5 Programa de: Mecanismos y Elementos de Máquinas UNIVERSIDAD NACIONAL DE CÓRDOBA Facultad de Ciencias Exactas, Físicas y Naturales República Argentina Código:
PLAN DE ESTUDIOS: 3 ACTA DE CONSEJO DE FACULTAD/DEPTO./CENTRO: 1. DATOS GENERALES PRERREQUISITOS/CORREQUISITOS: NINGUNO VERSIÓN: UNO 2.
 Página 1 de 6 PROGRAMA: INGENIERÍA DE TELECOMUNICACIONES PLAN DE ESTUDIOS: 3 ACTA DE CONSEJO DE FACULTAD/DEPTO./CENTRO: 68 ASIGNATURA/MÓDULO/SEMINARIO: CÁLCULO DIFERENCIAL 1. DATOS GENERALES CÓDIGO: 911115
Página 1 de 6 PROGRAMA: INGENIERÍA DE TELECOMUNICACIONES PLAN DE ESTUDIOS: 3 ACTA DE CONSEJO DE FACULTAD/DEPTO./CENTRO: 68 ASIGNATURA/MÓDULO/SEMINARIO: CÁLCULO DIFERENCIAL 1. DATOS GENERALES CÓDIGO: 911115
TUTORIAL BÁSICO DE MECÁNICA FLUIDOS
 TUTORIAL BÁSICO DE MECÁNICA FLUIDOS El tutorial es básico pues como habréis visto en muchos de ellos es haceros entender no sólo la aplicación práctica de cada teoría sino su propia existencia y justificación.
TUTORIAL BÁSICO DE MECÁNICA FLUIDOS El tutorial es básico pues como habréis visto en muchos de ellos es haceros entender no sólo la aplicación práctica de cada teoría sino su propia existencia y justificación.
Movilidad Mediante las Ecuaciones de Clausura de Lazos.
 Movilidad Mediante las Ecuaciones de Clausura de Lazos. José María Rico Martínez Departamento de Ingeniería Mecánica. Universidad de Guanajuato, F. I. M. E. E. Calle Tampico No. 912, Col. Bellavista. CP
Movilidad Mediante las Ecuaciones de Clausura de Lazos. José María Rico Martínez Departamento de Ingeniería Mecánica. Universidad de Guanajuato, F. I. M. E. E. Calle Tampico No. 912, Col. Bellavista. CP
INGENIERÍA INDUSTRIAL
 PROGRAMA DE ASIGNATURA ACTIVIDAD CURRICULAR: MECÁNICA Y MECANISMOS Código: 072529 Área: Tecnología Bloque: Tecnologías Básicas Nivel: 4º Tipo: Obligatoria Modalidad: Anual Carga Horaria Total: 72 hs. reloj
PROGRAMA DE ASIGNATURA ACTIVIDAD CURRICULAR: MECÁNICA Y MECANISMOS Código: 072529 Área: Tecnología Bloque: Tecnologías Básicas Nivel: 4º Tipo: Obligatoria Modalidad: Anual Carga Horaria Total: 72 hs. reloj
Matemáticas para estudiantes de Química
 Matemáticas para estudiantes de Química PROYECTO EDITORIAL BIBLIOTECA DE QUÍMICAS Director: Carlos Seoane Prado Catedrático de Química Orgánica Universidad Complutense de Madrid Matemáticas para estudiantes
Matemáticas para estudiantes de Química PROYECTO EDITORIAL BIBLIOTECA DE QUÍMICAS Director: Carlos Seoane Prado Catedrático de Química Orgánica Universidad Complutense de Madrid Matemáticas para estudiantes
Los dientes de los engranajes: 1.- Impiden el deslizamiento lo que a su vez permite que los ejes que giran con un sistema de engranajes, puedan estar
 Qué es un engranaje? Un engranaje es una rueda dentada Los engranajes se unen unos a otros por sus dientes (transmisión directa) o a través de una cadena, formando así un sistema transmisor del movimiento.
Qué es un engranaje? Un engranaje es una rueda dentada Los engranajes se unen unos a otros por sus dientes (transmisión directa) o a través de una cadena, formando así un sistema transmisor del movimiento.
MECÁNICA II CURSO 2004/05
 1.1.- Movimientos de un sólido rígido. (rotación alrededor de ejes fijos) 1.1.1 El conjunto representado se compone de dos varillas y una placa rectangular BCDE soldadas entre sí. El conjunto gira alrededor
1.1.- Movimientos de un sólido rígido. (rotación alrededor de ejes fijos) 1.1.1 El conjunto representado se compone de dos varillas y una placa rectangular BCDE soldadas entre sí. El conjunto gira alrededor
e+ 2 Fay* Límites de una función Teoremas de los límites de funciones Límites unilaterales Límites infinitos 105
 e+ I f 1.1 Números reales y desigualdades 2 1.2 Coordenadas y rectas 16 1.3 Circunferencias y gráficas de ecuaciones 32 1.4 Funciones 42 1.5 Gráficas de funciones S5 1.6 Funciones trigonométricas 61 Ejercicios
e+ I f 1.1 Números reales y desigualdades 2 1.2 Coordenadas y rectas 16 1.3 Circunferencias y gráficas de ecuaciones 32 1.4 Funciones 42 1.5 Gráficas de funciones S5 1.6 Funciones trigonométricas 61 Ejercicios
CLASIFICACION GENERAL DE LAS MAQUINAS HIDRAULICAS
 SEMANA 3 2. Maquinas hidráulicas. Clasificación de las máquinas hidráulicas. Maquinas hidráulicas motrices. Descripción. Clasificación. Maquinas hidráulicas generatrices. Descripción. Clasificación. Maquinas
SEMANA 3 2. Maquinas hidráulicas. Clasificación de las máquinas hidráulicas. Maquinas hidráulicas motrices. Descripción. Clasificación. Maquinas hidráulicas generatrices. Descripción. Clasificación. Maquinas
Javier Junquera. Movimiento de rotación
 Javier Junquera Movimiento de rotación Bibliografía Física, Volumen 1, 3 edición Raymod A. Serway y John W. Jewett, Jr. Ed. Thomson ISBN: 84-9732-168-5 Capítulo 10 Física, Volumen 1 R. P. Feynman, R. B.
Javier Junquera Movimiento de rotación Bibliografía Física, Volumen 1, 3 edición Raymod A. Serway y John W. Jewett, Jr. Ed. Thomson ISBN: 84-9732-168-5 Capítulo 10 Física, Volumen 1 R. P. Feynman, R. B.
Javier Junquera. Equilibrio estático
 Javier Junquera Equilibrio estático Bibliografía Física, Volumen 1, 6 edición Raymod A. Serway y John W. Jewett, Jr. Ed. Thomson ISBN: 84-9732-168-5 Capítulo 12 Definición de equilibrio El término equilibrio
Javier Junquera Equilibrio estático Bibliografía Física, Volumen 1, 6 edición Raymod A. Serway y John W. Jewett, Jr. Ed. Thomson ISBN: 84-9732-168-5 Capítulo 12 Definición de equilibrio El término equilibrio
NÚCLEO DE BOLÍVAR CÓDIGO: Horas Teóricas Horas para Evaluaciones Horas Perdidas Horas Efectivas
 UNIVERSIDAD DE ORIENTE ASIGNATURA: Física I NÚCLEO DE BOLÍVAR CÓDIGO: 005-1814 UNIDAD DE ESTUDIOS BÁSICOS PREREQUISITO: Ninguno ÁREA DE FÍSICA HORAS SEMANALES: 6 horas OBJETIVOS GENERALES: Al finalizar
UNIVERSIDAD DE ORIENTE ASIGNATURA: Física I NÚCLEO DE BOLÍVAR CÓDIGO: 005-1814 UNIDAD DE ESTUDIOS BÁSICOS PREREQUISITO: Ninguno ÁREA DE FÍSICA HORAS SEMANALES: 6 horas OBJETIVOS GENERALES: Al finalizar
CONTENIDO SÓLIDO RÍGIDO I. CINEMÁTICA. Definición de sólido rígido. Cálculo de la posición del centro de masas. Movimiento de rotación y de traslación
 CONTENIDO Definición de sólido rígido Cálculo de la posición del centro de masas Movimiento de rotación y de traslación Movimiento del sólido rígido en el plano Momento de inercia Teorema de Steiner Tema
CONTENIDO Definición de sólido rígido Cálculo de la posición del centro de masas Movimiento de rotación y de traslación Movimiento del sólido rígido en el plano Momento de inercia Teorema de Steiner Tema
6 DINAMICA DEL CUERPO RIGIDO
 6 DINAMICA DEL CUERPO RIGIDO 6. CINEMATICA 6.. Configuracion de un Cuerpo Rígido: Angulos de Euler Un cuerpo rígido se puede entender como una distribución continua de materia que se subdivide en pequeños
6 DINAMICA DEL CUERPO RIGIDO 6. CINEMATICA 6.. Configuracion de un Cuerpo Rígido: Angulos de Euler Un cuerpo rígido se puede entender como una distribución continua de materia que se subdivide en pequeños
Cálculo Integral Enero 2015
 Cálculo Integral Enero 015 Laboratorio # 1 Antiderivadas I.- Halle las siguientes integrales indefinidas. 10) ) 6) 1 1 1 1 16) 1 8) 9) 18) II.- Calcule 1.. 1 Cálculo Integral Enero 015 Laboratorio # Aplicaciones
Cálculo Integral Enero 015 Laboratorio # 1 Antiderivadas I.- Halle las siguientes integrales indefinidas. 10) ) 6) 1 1 1 1 16) 1 8) 9) 18) II.- Calcule 1.. 1 Cálculo Integral Enero 015 Laboratorio # Aplicaciones
Mecánica para Ingenieros: Cinemática. 1. La Mecánica como ciencia
 Mecánica para Ingenieros: Cinemática 1. La Mecánica como ciencia La Mecánica como ciencia 1. Objeto de la Mecánica 2. Magnitudes físicas y unidades 3. Idealizaciones 4. Leyes de Newton 5. Partes de la
Mecánica para Ingenieros: Cinemática 1. La Mecánica como ciencia La Mecánica como ciencia 1. Objeto de la Mecánica 2. Magnitudes físicas y unidades 3. Idealizaciones 4. Leyes de Newton 5. Partes de la
TEMARIO DEL EXAMEN DE EVALUACIÓN INTEGRAL PARA EL PROCESO DE ADMISIÓN Para facultades de Ingeniería y Arquitectura
 TEMARIO DEL EXAMEN DE EVALUACIÓN INTEGRAL PARA EL PROCESO DE ADMISIÓN 2017-01 Para facultades de Ingeniería y Arquitectura MATEMÁTICA Aptitudes Número y operaciones Conversión de unidades, razones y proporciones,
TEMARIO DEL EXAMEN DE EVALUACIÓN INTEGRAL PARA EL PROCESO DE ADMISIÓN 2017-01 Para facultades de Ingeniería y Arquitectura MATEMÁTICA Aptitudes Número y operaciones Conversión de unidades, razones y proporciones,
FICHA DE ADAPTACIÓN CURRICULAR 3º ESO Nombre:... Curso:... 1) MECANISMOS: LA PALANCA
 MECANISMOS: LA PALANCA") FICHA DE ADAPTACIÓN CURRICULAR 3º ESO Nombre:... Curso:... CALIFICACIÓN: 1) MECANISMOS: LA PALANCA La palanca es un mecanismo que transforma un movimiento lineal, es decir de traslación, en otro lineal
FICHA DE ADAPTACIÓN CURRICULAR 3º ESO Nombre:... Curso:... CALIFICACIÓN: 1) MECANISMOS: LA PALANCA La palanca es un mecanismo que transforma un movimiento lineal, es decir de traslación, en otro lineal
Introducción a la Cinemática de las Máquinas.
 Introducción a la Cinemática de las Máquinas. José María Rico Martínez Departamento de Ingeniería Mecánica División de Ingenierías, Campus Irapuato-Salamanca Universidad de Guanajuato Salamanca, Gto. 36885,
Introducción a la Cinemática de las Máquinas. José María Rico Martínez Departamento de Ingeniería Mecánica División de Ingenierías, Campus Irapuato-Salamanca Universidad de Guanajuato Salamanca, Gto. 36885,
INDICE. 88 determinante 36. Familias de líneas rectas Resumen de resultados 96
 INDICE Geometría Analítica Plana Capitulo Primero Sistema de Coordenadas Articulo 1. Introducción 1 2. Segmento rectilíneo dirigido 1 3. Sistema coordenado lineal 3 4. Sistema coordenado en el plano 5
INDICE Geometría Analítica Plana Capitulo Primero Sistema de Coordenadas Articulo 1. Introducción 1 2. Segmento rectilíneo dirigido 1 3. Sistema coordenado lineal 3 4. Sistema coordenado en el plano 5
Trabajo Práctico de Aula N 7 Dinámica de un cuerpo rígido
 Trabajo Práctico de Aula N 7 Dinámica de un cuerpo rígido 1) Un bloque de 2000 kg está suspendido en el aire por un cable de acero que pasa por una polea y acaba en un torno motorizado. El bloque asciende
Trabajo Práctico de Aula N 7 Dinámica de un cuerpo rígido 1) Un bloque de 2000 kg está suspendido en el aire por un cable de acero que pasa por una polea y acaba en un torno motorizado. El bloque asciende
Mecánica del Cuerpo Rígido
 Mecánica del Cuerpo Rígido Órdenes de Magnitud Cinemática de la Rotación en Contexto 7.1 Estime la frecuencia de giro a potencia máxima de un ventilador de techo y su correspondiente velocidad angular.
Mecánica del Cuerpo Rígido Órdenes de Magnitud Cinemática de la Rotación en Contexto 7.1 Estime la frecuencia de giro a potencia máxima de un ventilador de techo y su correspondiente velocidad angular.
CONSIDERACIONES MECÁNICAS DE LOS GIROS
 CONSIDERACIONES MECÁNICAS DE LOS GIROS El giro o rotación de un cuerpo sucede cuando los puntos de su trayectoria describen arcos de circunferencias alrededor de un eje que es solidario (pertenece) al
CONSIDERACIONES MECÁNICAS DE LOS GIROS El giro o rotación de un cuerpo sucede cuando los puntos de su trayectoria describen arcos de circunferencias alrededor de un eje que es solidario (pertenece) al
INDICE. 88 determinante 36. Familias de líneas rectas Resumen de resultados 96 Capitulo IV
 INDICE Geometría Analítica Plana Capitulo Primero Artículo 1. Introducción 1 2. Segmento rectilíneo dirigido 1 3. Sistema coordenado lineal 3 4. Sistema coordenado en el plano 5 5. Carácter de la geografía
INDICE Geometría Analítica Plana Capitulo Primero Artículo 1. Introducción 1 2. Segmento rectilíneo dirigido 1 3. Sistema coordenado lineal 3 4. Sistema coordenado en el plano 5 5. Carácter de la geografía
Mediante herramienta de corte periférico Mediante herramienta de corte frontal
 MAQUINAS HERRAMIENTAS FRESADORAS El fresado es un procedimiento de elaboración mecánica mediante el cual una herramienta (fresa), provista de aristas cortantes dispuestas simétricamente alrededor de un
MAQUINAS HERRAMIENTAS FRESADORAS El fresado es un procedimiento de elaboración mecánica mediante el cual una herramienta (fresa), provista de aristas cortantes dispuestas simétricamente alrededor de un
Introducción. Cuerpo Rígido. Mecánica Racional 20 TEMA 4: Cinemática de los Cuerpos Rígidos.
 Introducción. La cinemática de cuerpos rígidos estudia las relaciones existentes entre el tiempo, las posiciones, las velocidades y las aceleraciones de las diferentes partículas que forman un cuerpo rígido.
Introducción. La cinemática de cuerpos rígidos estudia las relaciones existentes entre el tiempo, las posiciones, las velocidades y las aceleraciones de las diferentes partículas que forman un cuerpo rígido.
Serie de ejercicios de Cinemática y Dinámica TRASLACIÓN Y ROTACIÓN PURAS
 Serie de ejercicios de inemática y Dinámica TRSLIÓN Y ROTIÓN PURS 1. La camioneta que se representa en la figura viaja originalmente a 9 km/h y, frenando uniformemente, emplea 6 m en detenerse. Diga qué
Serie de ejercicios de inemática y Dinámica TRSLIÓN Y ROTIÓN PURS 1. La camioneta que se representa en la figura viaja originalmente a 9 km/h y, frenando uniformemente, emplea 6 m en detenerse. Diga qué
Introducción. Flujo Eléctrico.
 Introducción La descripción cualitativa del campo eléctrico mediante las líneas de fuerza, está relacionada con una ecuación matemática llamada Ley de Gauss, que relaciona el campo eléctrico sobre una
Introducción La descripción cualitativa del campo eléctrico mediante las líneas de fuerza, está relacionada con una ecuación matemática llamada Ley de Gauss, que relaciona el campo eléctrico sobre una
Universidad de Sonora Departamento de Física. Mecánica II. Dr. Roberto Pedro Duarte Zamorano 2016
 Universidad de Sonora Departamento de Física Mecánica II Dr. Roberto Pedro Duarte Zamorano 2016 Temario 1. Cinemática rotacional. 2. Dinámica rotacional. 3. Las leyes de Newton en sistemas de referencia
Universidad de Sonora Departamento de Física Mecánica II Dr. Roberto Pedro Duarte Zamorano 2016 Temario 1. Cinemática rotacional. 2. Dinámica rotacional. 3. Las leyes de Newton en sistemas de referencia
» Ecuación del movimiento libre de un grado de libertad amortiguado: ED lineal de 2º orden homogénea cuya solución es de la forma:
 1.3. Oscilador armónico amortiguado 1» Ecuación del movimiento libre de un grado de libertad amortiguado: ED lineal de 2º orden homogénea cuya solución es de la forma: Si introducimos esta solución en
1.3. Oscilador armónico amortiguado 1» Ecuación del movimiento libre de un grado de libertad amortiguado: ED lineal de 2º orden homogénea cuya solución es de la forma: Si introducimos esta solución en
UNIDAD 6 F U E R Z A Y M O V I M I E N T O
 UNIDAD 6 F U E R Z A Y M O V I M I E N T O 1. EL MOVIMIENTO DE LOS CUERPOS Un cuerpo está en movimiento si su posición cambia a medida que pasa el tiempo. No basta con decir que un cuerpo se mueve, sino
UNIDAD 6 F U E R Z A Y M O V I M I E N T O 1. EL MOVIMIENTO DE LOS CUERPOS Un cuerpo está en movimiento si su posición cambia a medida que pasa el tiempo. No basta con decir que un cuerpo se mueve, sino
Momento angular o cinético
 Momento angular o cinético Definición de momento angular o cinético Consideremos una partícula de masa m, con un vector de posición r y que se mueve con una cantidad de movimiento p = mv z L p O r y x
Momento angular o cinético Definición de momento angular o cinético Consideremos una partícula de masa m, con un vector de posición r y que se mueve con una cantidad de movimiento p = mv z L p O r y x
Z 1 = 8 Z 2 = 16 W 1 Z 1 = W 2 Z 2
 7- SISTEMAS DE ENGRANAJES Para que dos ruedas dentadas engranen entre sí, el tamaño de los dientes de cada una deben ser iguales. Z 1 = 8 Z 2 = 16 El número de dientes de un engranaje se representa por
7- SISTEMAS DE ENGRANAJES Para que dos ruedas dentadas engranen entre sí, el tamaño de los dientes de cada una deben ser iguales. Z 1 = 8 Z 2 = 16 El número de dientes de un engranaje se representa por
APORTE AL DISEÑO DE ENGRANAJES NO CIRCULARES CILÍNDRICOS RECTOS
 UNIVERSIDAD POLITÉCNICA DE CATALUÑA Escuela Técnica Superior de Ingeniería Industrial de Barcelona Departamento de Ingeniería Mecánica Tesis Doctoral APORTE AL DISEÑO DE ENGRANAJES NO CIRCULARES CILÍNDRICOS
UNIVERSIDAD POLITÉCNICA DE CATALUÑA Escuela Técnica Superior de Ingeniería Industrial de Barcelona Departamento de Ingeniería Mecánica Tesis Doctoral APORTE AL DISEÑO DE ENGRANAJES NO CIRCULARES CILÍNDRICOS
División 1. Descripción y Ejemplos de Mecanismos
 CAPITULO 2 MECANISMOS División 1 Descripción y Ejemplos de Mecanismos 1. Introducción En esta división del capítulo de mecanismos se presentarán los conceptos básicos de mecanismos junto con la descripción
CAPITULO 2 MECANISMOS División 1 Descripción y Ejemplos de Mecanismos 1. Introducción En esta división del capítulo de mecanismos se presentarán los conceptos básicos de mecanismos junto con la descripción
Cinemática del Robot. CI-2657 Robótica M.Sc. Kryscia Ramírez Benavides
 M.Sc. Kryscia Ramírez Benavides Sistema Robótico Cinemática Dinámica Planeamiento de Tareas Software Hardware Diseño Mecánico Actuadores Sistema de Control Sensores 2 Introducción Con el fin de controlar
M.Sc. Kryscia Ramírez Benavides Sistema Robótico Cinemática Dinámica Planeamiento de Tareas Software Hardware Diseño Mecánico Actuadores Sistema de Control Sensores 2 Introducción Con el fin de controlar
PROGRAMA DE CURSO DE INGRESO - ASIGNATURA FISICA
 PROGRAMA DE CURSO DE INGRESO - ASIGNATURA FISICA Unidades Programáticas 1. Magnitudes Físicas 2. Vectores 3. Cinemática Escalar 4. Dinámica 5. Mecánica de Fluidos 6. Termometría y Calorimetría. Desarrollo
PROGRAMA DE CURSO DE INGRESO - ASIGNATURA FISICA Unidades Programáticas 1. Magnitudes Físicas 2. Vectores 3. Cinemática Escalar 4. Dinámica 5. Mecánica de Fluidos 6. Termometría y Calorimetría. Desarrollo
I. Objetivos. II. Introducción.
 Universidad de Sonora División de Ciencias Exactas y Naturales Departamento de Física Laboratorio de Mecánica II Práctica #: Dinámica rotacional: Cálculo del Momento de Inercia I. Objetivos. Medir el momento
Universidad de Sonora División de Ciencias Exactas y Naturales Departamento de Física Laboratorio de Mecánica II Práctica #: Dinámica rotacional: Cálculo del Momento de Inercia I. Objetivos. Medir el momento
El momento tiende a provocar una aceleración angular (cambio en la velocidad de giro) en el cuerpo sobre el cual se aplica (puerta, molinete, etc.).
 en el cuerpo sobre el cual se aplica (puerta, molinete, etc.).") 1 ESTATICA MOMENTO DE UNA FUERZA Dada una fuerza F situada a una distancia d de un punto o, se denomina (definición matemática) momento de la fuerza con respecto a un punto o, al producto de la intensidad
1 ESTATICA MOMENTO DE UNA FUERZA Dada una fuerza F situada a una distancia d de un punto o, se denomina (definición matemática) momento de la fuerza con respecto a un punto o, al producto de la intensidad
Física: Dinámica Conceptos básicos y Problemas
 Física: Dinámica Conceptos básicos y Problemas Dictado por: Profesor Aldo Valcarce 2 do semestre 2014 Mecánica Cinemática Descripción del movimiento. Cómo se mueve? Dinámica Causas del movimiento. Por
Física: Dinámica Conceptos básicos y Problemas Dictado por: Profesor Aldo Valcarce 2 do semestre 2014 Mecánica Cinemática Descripción del movimiento. Cómo se mueve? Dinámica Causas del movimiento. Por
I.PROGRAMA DE ESTUDIOS. Unidad 1. Conceptos básicos de la teoría de las estructuras
 I.PROGRAMA DE ESTUDIOS Unidad 1 Conceptos básicos de la teoría de las estructuras 1.1.Equilibrio 1.2.Relación fuerza desplazamiento 1.3.Compatibilidad 1.4.Principio de superposición 1.5.Enfoque de solución
I.PROGRAMA DE ESTUDIOS Unidad 1 Conceptos básicos de la teoría de las estructuras 1.1.Equilibrio 1.2.Relación fuerza desplazamiento 1.3.Compatibilidad 1.4.Principio de superposición 1.5.Enfoque de solución
Equilibrio y Movimiento de los objetos
 Fundamentos para programación y robótica Módulo 3: Fundamentos de mecánica Capítulo 2: Equilibrio y Movimiento de los objetos. Objetivos: o Conocer del equilibrio de los objetos o Conocer del movimiento
Fundamentos para programación y robótica Módulo 3: Fundamentos de mecánica Capítulo 2: Equilibrio y Movimiento de los objetos. Objetivos: o Conocer del equilibrio de los objetos o Conocer del movimiento
E N G R A N A J E S INTRODUCCION
 E N G R A N A J E S INTRODUCCION Un engranaje es un mecanismo de transmisión, es decir, se utiliza para transmitir el movimiento de rotación entre dos árboles. Está formado por dos ruedas dentadas que
E N G R A N A J E S INTRODUCCION Un engranaje es un mecanismo de transmisión, es decir, se utiliza para transmitir el movimiento de rotación entre dos árboles. Está formado por dos ruedas dentadas que
TEMA 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 1.10. PRYLPLHQWR. Otra posible definición de PHFDQLVPR sería decir que es un
 TEMA 1 $1É/,6,6
TEMA 1 $1É/,6,6
1. El movimiento circular uniforme (MCU)
") FUNDACIÓN INSTITUTO A DISTANCIA EDUARDO CABALLERO CALDERON Espacio Académico: Física Docente: Mónica Bibiana Velasco Borda mbvelascob@uqvirtual.edu.co CICLO: VI INICADORES DE LOGRO MOVIMIENTO CIRCULAR
FUNDACIÓN INSTITUTO A DISTANCIA EDUARDO CABALLERO CALDERON Espacio Académico: Física Docente: Mónica Bibiana Velasco Borda mbvelascob@uqvirtual.edu.co CICLO: VI INICADORES DE LOGRO MOVIMIENTO CIRCULAR
Fecha: 29/10/2013 MATEMÁTICAS
 Página: 1/5 MATEMÁTICAS Álgebra 1.- Conceptos y operaciones algebraicas fundamentales Terminología Operaciones fundamentales con monomios y polinomios o Reducción de términos semejantes o Suma, resta o
Página: 1/5 MATEMÁTICAS Álgebra 1.- Conceptos y operaciones algebraicas fundamentales Terminología Operaciones fundamentales con monomios y polinomios o Reducción de términos semejantes o Suma, resta o
móvil) conectado a un mecanismo de tracción.
 conectado a un mecanismo de tracción.") La polea: Es un mecanismo formado por un eje y una rueda acanalada, por la que pasa una cuerda o una correa. Para qué sirve? Para cambiar la dirección en la que actúa una fuerza y disminuir el esfuerzo
La polea: Es un mecanismo formado por un eje y una rueda acanalada, por la que pasa una cuerda o una correa. Para qué sirve? Para cambiar la dirección en la que actúa una fuerza y disminuir el esfuerzo
Formatos para prácticas de laboratorio
 CARRERA PLAN DE ESTUDIO CLAVE ASIGNATURA NOMBRE DE LA ASIGNATURA TRONCO COMÚN 2005-2 4348 DINÁMICA PRÁCTICA NO. DIN-09 LABORATORIO DE NOMBRE DE LA PRÁCTICA LABORATORIO DE CIENCIAS BÁSICAS PÉNDULO SIMPLE
CARRERA PLAN DE ESTUDIO CLAVE ASIGNATURA NOMBRE DE LA ASIGNATURA TRONCO COMÚN 2005-2 4348 DINÁMICA PRÁCTICA NO. DIN-09 LABORATORIO DE NOMBRE DE LA PRÁCTICA LABORATORIO DE CIENCIAS BÁSICAS PÉNDULO SIMPLE
1.- Con la carretilla de la figura queremos transportar una carga de tierra.
 MECANISMOS 1.- Con la carretilla de la figura queremos transportar una carga de tierra. A) qué tipo de palanca estamos empleando? B) Qué esfuerzo tenemos que realizar si el peso de la arena a transportar
MECANISMOS 1.- Con la carretilla de la figura queremos transportar una carga de tierra. A) qué tipo de palanca estamos empleando? B) Qué esfuerzo tenemos que realizar si el peso de la arena a transportar
El estudio del movimiento de los cuerpos generalmente se divide en dos fases, por conveniencia: la cinemática y la dinámica.
 Tema 1: Cinemática. Introducción. Describir el movimiento de objetos es una cuestión fundamental en la mecánica. Para describir el movimiento es necesario recurrir a una base de conceptos o ideas, sobre
Tema 1: Cinemática. Introducción. Describir el movimiento de objetos es una cuestión fundamental en la mecánica. Para describir el movimiento es necesario recurrir a una base de conceptos o ideas, sobre
Docente: Angel Arrieta Jiménez
 CINEMÁTICA DE UNA PARTÍCULA EN DOS DIMENSIONES EJERCICIOS DE MOVIMIENTO CIRCULAR 1. En el ciclo de centrifugado de una maquina lavadora, el tubo de 0.3m de radio gira a una tasa constante de 630 r.p.m.
CINEMÁTICA DE UNA PARTÍCULA EN DOS DIMENSIONES EJERCICIOS DE MOVIMIENTO CIRCULAR 1. En el ciclo de centrifugado de una maquina lavadora, el tubo de 0.3m de radio gira a una tasa constante de 630 r.p.m.
7. PÉNDULO DE TORSIÓN
 7. PÉNDULO DE TORSÓN OBJETVO El objetivo de la práctica es comprobar la dependencia del momento de inercia de un objeto respecto a la distancia al centro de rotación y realizar la medición del momento
7. PÉNDULO DE TORSÓN OBJETVO El objetivo de la práctica es comprobar la dependencia del momento de inercia de un objeto respecto a la distancia al centro de rotación y realizar la medición del momento
Guía para oportunidades extraordinarias de Física 2
 Guía para oportunidades extraordinarias de Física 2 Capitulo 1 Vectores a) Introducción b) Cantidades vectoriales c) Métodos analíticos Capitulo 2 Dinámica a) Fuerza b) Leyes de Newton sobre el movimiento
Guía para oportunidades extraordinarias de Física 2 Capitulo 1 Vectores a) Introducción b) Cantidades vectoriales c) Métodos analíticos Capitulo 2 Dinámica a) Fuerza b) Leyes de Newton sobre el movimiento
Departamento de Tecnología MECANISMOS
 MECANISMOS 1. Mecanismos de transmisión circular 1.1 Ruedas de fricción 1.2 Poleas y correas 1.3 Ruedas dentadas 1.4 Transmisión por cadenas 1.5 Tornillo sin fin 2. Mecanismos de transformación de movimiento
MECANISMOS 1. Mecanismos de transmisión circular 1.1 Ruedas de fricción 1.2 Poleas y correas 1.3 Ruedas dentadas 1.4 Transmisión por cadenas 1.5 Tornillo sin fin 2. Mecanismos de transformación de movimiento
Movimiento circular. Las varillas de un reloj análogo se mueven en forma circular.
 Movimiento circular La Luna se mueve casi en forma circular alrededor de la Tierra. La Tierra se mueve casi circularmente alrededor del Sol, a ese movimiento le llamamos de traslación. Y, además, la Tierra
Movimiento circular La Luna se mueve casi en forma circular alrededor de la Tierra. La Tierra se mueve casi circularmente alrededor del Sol, a ese movimiento le llamamos de traslación. Y, además, la Tierra
Analizar, diseñar, calcular y seleccionar diferentes mecanismos involucrados en la transmisión de movimiento de máquinas.
 Nombre de la asignatura: Mecanismos Aportación al perfil Analizar, diseñar, calcular y seleccionar diferentes mecanismos involucrados en la transmisión de movimiento de máquinas. Objetivo de aprendizaje
Nombre de la asignatura: Mecanismos Aportación al perfil Analizar, diseñar, calcular y seleccionar diferentes mecanismos involucrados en la transmisión de movimiento de máquinas. Objetivo de aprendizaje
Universidad Tecnológica Nacional Facultad Regional Bahía Blanca Ingeniería Mecánica. Mecánica Racional. Ejercicio de Mecánica Vectorial y Analítica
 Mecánica Racional Ejercicio de Mecánica Vectorial y Analítica Profesor Dr. Ercoli Liberto Alumno Breno Alejandro Año 2012 1 Cinemática y cinética del cuerpo rígido: Universidad Tecnológica Nacional Ejercicio
Mecánica Racional Ejercicio de Mecánica Vectorial y Analítica Profesor Dr. Ercoli Liberto Alumno Breno Alejandro Año 2012 1 Cinemática y cinética del cuerpo rígido: Universidad Tecnológica Nacional Ejercicio
Práctico 2: Mecánica lagrangeana
 Mecánica Anaĺıtica Curso 2016 Práctico 2: Mecánica lagrangeana 1. La polea y la cuerda de la figura son ideales y los bloques deslizan sin roce. Obtenga las aceleraciones de los bloques a partir de las
Mecánica Anaĺıtica Curso 2016 Práctico 2: Mecánica lagrangeana 1. La polea y la cuerda de la figura son ideales y los bloques deslizan sin roce. Obtenga las aceleraciones de los bloques a partir de las
I. Objetivo. II. Introducción.
 Universidad de Sonora División de Ciencias Exactas y Naturales Departamento de Física Laboratorio de Mecánica II Práctica #1: Cinemática Rotacional: MCU y MCUA I. Objetivo. Estudiar el movimiento rotacional
Universidad de Sonora División de Ciencias Exactas y Naturales Departamento de Física Laboratorio de Mecánica II Práctica #1: Cinemática Rotacional: MCU y MCUA I. Objetivo. Estudiar el movimiento rotacional
Área: EDUCACION TECNOLOGICA Asignatura: TECNOLOGIA II. Título TRANSMISIONES MECANICAS. Curso 2 AÑO Año: Pag.1/15
 Área: EDUCACION TECNOLOGICA Asignatura: TECNOLOGIA II Título TRANSMISIONES MECANICAS Curso 2 AÑO Año: 2006 Pag.1/15 INTRODUCCION Desde tiempos inmemorables el hombre realizó grandes esfuerzos para las
Área: EDUCACION TECNOLOGICA Asignatura: TECNOLOGIA II Título TRANSMISIONES MECANICAS Curso 2 AÑO Año: 2006 Pag.1/15 INTRODUCCION Desde tiempos inmemorables el hombre realizó grandes esfuerzos para las
EL GIRÓSCOPO. Determinación experimental del momento de inercia del giróscopo y de la velocidad angular de precesión.
 EL GIRÓSCOPO 1. OBJETIVOS Determinación experimental del momento de inercia del giróscopo y de la velocidad angular de precesión. 2. FUNDAMENTO TEÓRICO. Un giróscopo es un disco en rotación construido
EL GIRÓSCOPO 1. OBJETIVOS Determinación experimental del momento de inercia del giróscopo y de la velocidad angular de precesión. 2. FUNDAMENTO TEÓRICO. Un giróscopo es un disco en rotación construido