PROBLEMAS DE CINEMÁTICA DE MECANISMOS
|
|
|
- María Victoria Páez Moya
- hace 10 años
- Vistas:
Transcripción
1 TEORÍA DE MÁQUINAS PROBLEMAS DE CINEMÁTICA DE MECANISMOS Antonio Javier Nieto Quijorna Área de Ingeniería Mecánica E.T.S. Ingenieros Industriales

2 Capítulo 1 GRADOS DE LIBERTAD PROBLEMA. En la figura se muestra un mecanismo de guiado de la válvula (barra 9) de un motor de combustión interna. Identificar las barras que componen dicho mecanismo así como los pares cinemáticas. Determinar también el número de grados de libertad. Resolución Resolvemos el problema con la ecuación de grados de libertad de Kutzbach para un mecanismo con movimiento plano: n = 3 (n b 1) 2 p 1 p 2 Siendo n b el numero de barras, p 1 los pares cinemáticos que admiten un grado de libertad y p 2 los pares cinemáticos que admiten dos grados de libertad. Numeramos las barras como se muestra en la figura: 1

3 número de barras: 9 pares cinemáticos de tipo 1: 10(7 cilíndricos y 3 prismáticos) pares cinemáticos de tipo 2: 1 (entre las piezas 6 y 7) Aplicando estos valores a la fórmula para obtener el siguiente resultado: n = 3 (9 1) = PROBLEMA. La figura muestra un mecanismo para captación de imágenes mediante cámaras CCD (cuerpo rojo). Identificar el número de barras del mecanismo, pares cinemáticos y grados de libertad. Resolución 2
.")
4 número de barras: 5 pares cinemáticos de tipo 1: 4 (entre 1 y 2, 2 y 3, 3 y 4, 4 y 5) pares cinemáticos de tipo 2: 0 n = 3 (n b 1) 2 p 1 p 2 n = 3 (5 1) = PROBLEMA. La figura muestra un brazo robotizado para captación de objetos mediante pinzas. Identificar el número de barras del mecanismo, así como los pares cinemáticos y grados de libertad. Resolución 3

5 Aplicamos la expresión de Kutzbach para el caso de tres dimensiones: n = 6 (n b 1) 5 p 1 4 p 2 3 p 3 2 p 4 p 5 número de barras: 5 pares cinemáticos de tipo 1: 3 (entre 3 y 4, 4 y 5(un por cada brazo de la pinza)) pares cinemáticos de tipo 2: 0 pares cinemáticos de tipo 3: 1 (entre 2 y 3) pares cinemáticos de tipo 4: 0 pares cinemáticos de tipo 5: 0 n = 6 (5 1) = PROBLEMA. La figura muestra una plataforma elevadora con un mecanismo de tijera ayudado por un actuador hidráulico. Determinar el número de barras, pares cinemáticos y grados de libertad. 4

6 Resolución Una primera posibilidad es hacer la siguiente configuración de barras: número de barras: 12 pares cinemáticos de tipo 1: 13 de rotación (entre 1 y 2, 2 y 3, 2 y 10, 2 y 5, 3 y 4, 3 y 12, 4 y 5, 4 y 7, 5 y 6, 5 y 9, 6 y 7, 6 y 11, 7 y 8) 3 pares prismáticos (entre 1 y 12, 8 y 11, 9 y 10) pares cinemáticos de tipo 2: 0 n = 3 (n b 1) 2 p 1 p 2 5
 pares cinemáticos de tipo 2: 0 n = 3 (n b 1)")
7 n = 3 (12 1) = 1 Otra forma de resolver este problema es con la siguiente configuración de barras: número de barras: 10 pares cinemáticos de tipo 1: 11 de rotación (entre 1 y 2, 2 y 3, 2 y 10, 2 y 5, 3 y 4, 4 y 5, 4 y 7, 5 y 6, 5 y 9, 6 y 7, 7 y 8) 2 pares prismáticos (entre 9 y 10) pares cinemáticos de tipo 2: 2(entre 3 y 11, 8 y 6) n = 3 (n b 1) 2 p 1 p 2 n = 3 (10 1) = PROBLEMA. La figura muestra el mecanismo de suspensión de un vehículo monoplaza. Representar el esquema de dicha suspensión tanto en planta (mecanismo de dirección) como en alzado (mecanismo de suspensión). Determinar en cada caso en número de grados de libertad. 6
 como en alzado (mecanismo de suspensión).")
8 Resolución Representamos en primer lugar el esquema de la suspensión: número de barras: 6 pares cinemáticos de tipo 1: 7 (6 de revolución y 1 prismático(entre 5 y 6)) pares cinemáticos de tipo 2: 0 7
) pares cinemáticos de")
9 n = 3 (n b 1) 2 p 1 p 2 n = 3 (6 1) = 1 En segundo lugar hacemos el esquema de la dirección: número de barras: 4 pares cinemáticos de tipo 1: 4 (3 de revolución y 1 prismático(entre 1 y 4)) pares cinemáticos de tipo 2: 0 n = 3 (n b 1) 2 p 1 p 2 n = 3 (4 1) = 1 8
) pares cinemáticos de tipo 2: 0 n = 3 (n b 1) 2 p 1 p 2 n = 3 (4")
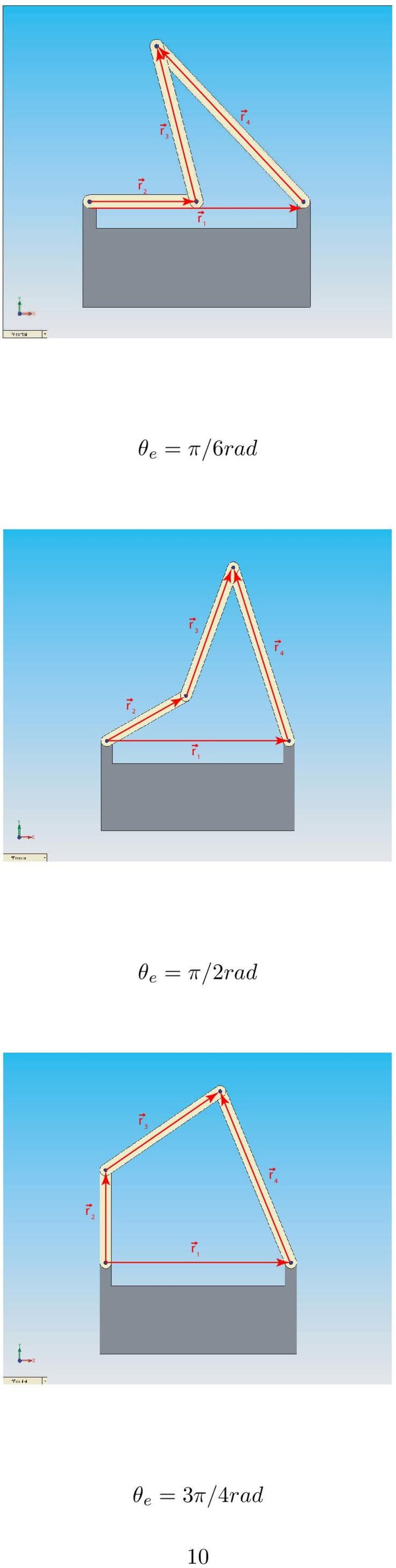
10 Capítulo 2 ANÁLISIS DE POSICIÓN. Método gráfico PROBLEMA. En la figura se muestra un mecanismo de cuatro barras. Realizar el análisis de posición para seis posiciones distintas de la barra de entrada, para los siguientes valores de las barras: i) L 1 = 2m, L 2 = 3m, L 3 = 4m, L 4 = 4m. ii) L 1 = 3m, L 2 = 2m, L 3 = 4m, L 4 = 4m. iii) L 1 = 4m, L 2 = 4m, L 3 = 3m, L 4 = 2m. i) ii) iii) r 2 r 4 r 3 r 1 Resolución i) L 1 = 2m, L 2 = 3m, L 3 = 4m, L 4 = 4m. θ e = 0rad 9
 L 1 = 4m, L 2 = 4m, L 3 = 3m, L 4 = 2m.")
11 r 3 r 4 r 2 r 1 θ e = π/6rad r 3 r 4 r 2 r 1 θ e = π/2rad r 3 r 4 r 2 r 1 θ e = 3π/4rad 10
12 r 3 r 4 r 3 r 4 r 2 r 1 θ e = πrad r 2 r 1 θ e = 3π/2rad r 4 r 3 r 1 r 2 ii) L 1 = 3m, L 2 = 2m, L 3 = 4m, L 4 = 4m. θ e = π/6rad 11

13 r 3 r 4 r 2 r 1 θ e = π/4rad r 3 r 4 r 2 r 1 θ e = π/3rad r 3 r 4 r 2 r 1 θ e = 0,416πrad 12

14 r 3 r 4 r 2 r 1 θ e = π/2rad r 3 r 4 r 2 r 1 θ e = 0,65πrad r 3 r 2 r 4 r 1 iii) L 1 = 4m, L 2 = 4m, L 3 = 3m, L 4 = 2m. θ e = 0,0389πrad 13

15 r 2 r 1 r 4 r 3 θ e = π/6rad r 2 r 3 r 1 r 4 θ e = π/2rad r 3 r 2 r 4 r 1 θ e = 3π/4rad 14

16 r 3 r 4 r 3 r 4 r 2 r 1 θ e = πrad r 1 r 2 θ e = 4π/3rad r 4 r 1 r 3 r PROBLEMA. En la figura se muestra un mecanismo biela-manivela. Determinar la posición de las barras, imponiendo 6 posiciones a la barra de entrada. Datos: L1 = 2; L2 = 4. 15

17 Resolución θ e = 0rad θ e = π/3rad θ e = 2π/3rad 16

18 θ e = πrad θ e = 4π/3rad θ e = 5π/3rad 17

19 2.3. PROBLEMA. En la figura se muestra un mecanismo de retorno rápido. Realizar el análisis de posición para seis posiciones distintas de la barra de entrada. Las dimensiones son barra de entrada 2 m, distancia entre centros 4 metros, barra 3 8 m. Resolución θ e = 0rad r 2 r 4 r 1 r 3 18

20 θ e = π/6rad r 2 r 4 r 1 r 3 θ e = π/2rad r 2 r 4 r 3 r 1 θ e = 3π/4rad r 2 r 4 r 3 r 1 19

21 θ e = πrad r 2 r 4 r 3 r 1 θ e = 3π/2rad r 4 r 2 r 1 r PROBLEMA. La figura muestra una leva excéntrica. Realizar el análisis de posición gráfico para 6 posiciones de la barra de entrada. Datos: R1 = 2; L1 = 5; R2 = 4; L2 = 4; O1A = 2; L3 = 5. 20
22 Resolución θ e = 0rad θ e = π/3rad θ e = 2π/3rad 21
23 θ e = πrad θ e = 4π/3rad θ e = 5π/3rad 2.5. PROBLEMA. En la figura se muestra un yugo inglés. Realizar el análisis de posición para seis posiciones distintas de la barra de entrada. Las dimensiones son OP = 4 m. 22
24 P A O Resolución Definimos los vectores r 1, r 2 y r 3 de la siguiente forma: r1 = AO r2 = OP r3 = PA θ e = 0rad r 2 r 3 = 0 r 1 θ e = π/6rad 23
25 r 2 r 1 r 3 = 0 r 2 r 3 r 1 θ e = π/2rad θ e = 3π/4rad r 3 r 2 r 1 θ e = πrad 24
26 r 3 = 0 r 2 r 1 θ e = 3π/2rad r 1 = 0 r 2 r PROBLEMA. Determinar gráficamente la posición de las barras del mecanismo que se muestra en la figura. Para ello, introduce 6 posiciones a la barra de entrada Datos: L1 = 2; O1O2 = 8; L2 = 2; AC = 8; L3= 6; BC = 8; L4 = 4; L5 = 1. Resolución 25
27 θ e = 0rad θ e = π/3rad θ e = 2π/3rad θ e = πrad θ e = 4π/3rad 26
28 θ e = 5π/3rad Resolución 2.7. PROBLEMA. En la figura se muestra una rueda escéntrica con una guía por donde se desplaza el bulón de barra 2. Realizar el análisis de posición para cuatro posiciones distintas de la barra de entrada. La longitud de la barra 2 es de 3 m, del centro de la rueda al punto sobre el que gira 2 m, y desde ese punto al centro de giro de la barra 2 hay 4 m. r 2 r 1 r 3 Resolución θ e = 0,06πrad 27
29 r 2 r 3 r 1 θ e = π/6rad r 2 r 3 r 1 θ e = π/4rad r 2 r 1 r 3 θ e = 0,48πrad 28
30 r 2 r 3 r PROBLEMA. La figura muestra la rueda de ginebra. Determinar su posición gráficamente, dando 6 posiciones a la barra de entrada. Datos: L1 = 3; O2A = 2. Resolución θ e = 0rad θ e = π/3rad 29
31 θ e = 2π/3rad θ e = πrad θ e = 4π/3rad θ e = 5π/3rad 30
32 31
33 Capítulo 3 ANÁLISIS DE POSICIÓN. Método analítico PROBLEMA. En la figura se muestra un mecanismo de cuatro barras. Realizar el análisis de posición para un ángulo de entrada θ 2 = 0rad y las siguientes longitudes de las barras: L 1 = 2m, L 2 = 3m, L 3 = 4m, L 4 = 4m. Resolución Si definimos un vector r k como r k = ρ k e iθ k el análisis de posición consiste en conocer los r k y los θ k, con k = 1, 2,... Para ello emplearemos razones y teoremas trigonométricos entre otras cosas. 32
34 Los ρ k son datos al igual que θ 2, por lo que nuestro problema consiste en hallar los ángulos: θ 1, θ 3 y θ 4. Es obvio que θ 1 = 0, t y unicamente tenemos que calcular θ 3 y θ 4. Para obtener θ 3 vamos a emplear el teorema del coseno: cosθ 3 = θ 3 = 104,47 o = 0,58 πrad De igual forma hacemos para calcular θ 4 : cosα = α = 46,56 o θ 4 = 180 o 46,56 o = 133,43 o = 0,74 πrad 3 4 Q 3 a Q PROBLEMA. En la figura se muestra un mecanismo biela-manivela. Realizar el análisis de posición de forma analítica si el ángulo de entrada es θ 2 = 0 o. Datos: L1 = 2 m, L2 = 4 m 33
35 Resolución El resultado es muy sencillo e inmediato. Las longitudes de los vectores 2 y 3 coinciden con las longitudes de las barras 1 y 2 respectivamente y la del vector 3 la podemos calcular por el teorema de Pitágoras. El ángulo del vector 2 es dato, 0 o, y el del vector 1 se puede observar en el gráfico que es 90 o, mientras que el del vector 3 es 180 o α siendo α el ángulo que forman los vectores 2 y 3. Este ángulo lo podemos calcular por el teorema del coseno. La solución es la siguiente: 34
36 ρ ρ2 2 = ρ2 3 ρ 1 = = 3,46 cosα = ρ2 2 +ρ2 3 ρ2 1 2 ρ 2 ρ 3 = α = 60 o θ 3 = 180 o α = 120 o θ 1 = 90 o ; θ 2 = 0 o ; θ 3 = 120 o. ρ 1 = 3,46m; ρ 2 = 2m; ρ 3 = 4m PROBLEMA. En la figura se muestra un mecanismo de retorno rápido. Realizar el análisis de posición analíticamente para un ángulo de la barra de entrada de θ 2 = 0 o. Las dimensiones son barra de entrada 2 m, distancia entre centros 4 metros, barra 3 8 m. Resolución θ 2 = 0 o, θ 1 = 270 o, θ 3 =?, θ 4 =?. ρ 2 = 2m, ρ 1 = 4, ρ 3 =?, ρ 4 = 8. 35
37 r 2 r 4 r 1 r 3 a Q 4 =Q 3 cos90 = 4+16 ρ ρ 3 = 4,47m cosα = 42 +ρ ρ 3 α = 26,57 o θ 3 = 90 o 26,57 o = 63,42 o 3.4. PROBLEMA. La figura muestra una leva excéntrica. Realizar el análisis de posición de forma analítica para un ángulo de entrada igual a 0 o. Datos: R1 = 2m; L1 = 5m; R2 = 4m; L2 = 4m; O1A = 2m; L3 = 5m. Resolución 36
38 ρ 3 ρ 4 ρ 6 ρ 2 ρ 5 ρ 1 Según hemos definido los vectores conocemos los siguientes datos: módulos de los vectores 1, 2, 3, 5 y 6 y los ángulos de los vectores 1, 2 y 5. El módulo del vector 6 es la suma de los radios de las dos ruedas. Utilizamos los vectores 5 y 6 para definir al 4, ya que r 4 = r 5 + r 6 Definimos un nuevo vector de módulo a y ángulo α 1 para poder obtener los ángulos que nos faltan = a 2 a = 5 α 1 = ar cos = 53,13 o α 2 = ar cos = 38,86 o a α 2 ρ 2 α 1 ρ 1 β 1 = ar cos = 73,73 o β 2 = ar cos = 53,13 o β 3 = ar cos = 53,13 o θ 6 = β 3 + α 1 = 106,26 θ 3 = 360 o 90 o β 1 + α 2 = 159,41 o ρ 3 ρ 6 β 2 β 3 β 1 a ϕ = 180 o θ 6 = 73,74 o cosϕ = 0,2799 = 4+36 ρ ρ 4 = 5,768 θ 4 = ar cos 4+33, ,072 = 86,819 o ρ 4 ρ 6 θ 4 ϕθ 6 ρ 5 37
39 Solución: θ 1 = 0 o, θ 2 = 90 o, θ 3 = 159,4 o,θ 4 = 86,819 o,θ 5 = 0 o,θ 6 = 106,2 o. ρ 1 = 5m, ρ 2 = 4m, ρ 3 = 5m, ρ 4 = 5,768m, ρ 5 = 2m, ρ 6 = 6m PROBLEMA. En la figura se muestra un yugo inglés. Realizar el análisis de posición de manera analítica para un ángulo de la barra de entrada θ 2 = 30 o. Las dimensiones son OP = 4 m. P A O Resolución θ 2 = 30 o, θ 1 = 180 o, θ 3 = 270 o. ρ 2 = 4m, ρ 1 =?, ρ 3 =?. r 2 r 3 Q 2 r 1 38
40 cosθ 2 = ρ1 ρ = ρ1 4 ρ 1 = 3,464m sinθ 2 = ρ3 ρ = ρ3 4 ρ 3 = 2m 3.6. PROBLEMA. Realizar el análisis de posición de forma analítica del mecanismo que se muestra en la figura para un ángulo de la barra de entrada de 0 o. Datos: L1 = 2m, O1O2 = 8m, L2 = 2m, AC = 8m, L3 = 6m, BC = 8m, L4 = 4m, L5 = 1m. Resolución Tenemos que determinar 9 longitudes y 9 ángulos de los vectores dibujados en el gráfico.de las longitudes conocemos 6, y de los vectores 4, con lo que tenemos = 8 incógnitas. Para resolverlas planteamos 8 ecuaciones escalares linealmente independientes. ρ 1 = 2m, ρ 2 = 2m, ρ 3 =?m, ρ 4 =?m, ρ 5 = 6m, ρ 6 = 4m, ρ 7 = 6m, ρ 8 = 1m, ρ 9 =?m. θ 1 = 0 o, θ 2 =? o, θ 3 =? o, θ 4 =? o, θ 5 =? o, θ 6 =? o, θ 7 = 0 o, θ 8 = 90 o, θ 9 = 0 o. Planteamos las siguientes ecuaciones vectoriales: 39
41 r 1 + r 3 = r 8 + r 9 { 2 + ρ3 cosθ 3 = ρ 9 ρ 3 sin θ 3 = 1 } (1) (2) r 2 + r 4 = { r 3 } 2 cosθ2 + ρ 4 cosθ 4 = ρ 3 cosθ 3 (3) 2 sinθ 2 + ρ 4 sin θ 4 = ρ 3 sinθ 3 (4) r 7 = r 2 + r 5 + { r 6 } 6 = 2 cosθ2 + 6 cosθ cosθ 6 (5) 0 = 2 sinθ sinθ sinθ 6 (6) r 8 + r 9 = r 1 + r 2 + { r 4 } ρ9 = cosθ 2 + ρ 4 cosθ 4 (7) 1 = 2 sinθ 2 + ρ 4 sinθ 4 (8) Resolviendo el sistema con paciencia obtenemos lo siguiente: ρ 1 = 2m, ρ 2 = 2m, ρ 3 = 8m, ρ 4 = 8m, ρ 5 = 6m, ρ 6 = 4m, ρ 7 = 6m, ρ 8 = 1m, ρ 9 = 9,91m. θ 1 = 0 o, θ 2 = 75,63 o, θ 3 = 173,71 o, θ 4 = 157,47 o, θ 5 = 20,08 o, θ 6 = 88,12 o, θ 7 = 0 o, θ 8 = 90 o, θ 9 = 0 o PROBLEMA. En la figura se muestra una rueda escéntrica con una guía por donde se desplaza el bulón de barra 2. Realizar el análisis de posición de manera analítica siendo el ángulo de la barra de entrada θ 2 = 30 o. La longitud de la barra 2 es de 3 m, del centro de la rueda al punto sobre el que gira 2 m, y desde ese punto al centro de giro de la barra 2 hay 4 m. 40
42 r 2 r 1 r 3 Resolución θ 2 = 30 o, θ 1 = 0 o, θ 3 =?. ρ 2 = 3m, ρ 1 = 4, ρ 3 =?. ρ 2 θ 2 α ρ 3 ρ 1 cosθ 2 = ρ2 1 +ρ2 2 ρ2 3 2ρ 1ρ 2 3 / 2 = 16+9 ρ ρ 3 = 2,053m cosα = 2, ,053 = 0,6828 α = 46,93 o θ 3 = 180 o 46,93 o = 133,068 o 3.8. PROBLEMA. La figura muestra la rueda de ginebra. Determinar el análisis de posición de forma analítica cuando el ángulo de entrada es 0 o.datos: L1 = 3m; O2A = 2m. 41
43 Resolución α es el ángulo que forman los vectores 1 y 2. ρ ρ2 3 = ρ2 2 ρ 2 = = 3,6055 cosα = ρ2 1 +ρ2 2 ρ2 3 2 ρ 1 ρ 2 = 4+9, ,42 α = 72,25 o θ 2 = (180 o α) = 107,74 o θ 1 = 0 o ; θ 2 = 107,74 o ; θ 3 = 90 o. ρ 1 = 2m; ρ 2 = 3,6055m; ρ 3 = 3m. 42
44 Capítulo 4 RELACIÓN 4. ANÁLISIS DE VELOCIDAD. Método Gráfico PROBLEMA. En la figura se muestra un mecanismo de cuatro barras. Para un ángulo de entrada θ 2 = 0 o y velocidad de esta barra ω 2 = 1rad/s calcular la velocidad de la barra 4 (barra de salida). Las dimensiones son: L 1 = 2m, L 2 = 3m, L 3 = 4m, L 4 = 4m. Resolución Para realizar el análisis de velocidad de forma analítica tenemos que tener claras dos ecuaciones. La primera es que un punto A que gira alrededor de un centro O con un movimiento circular tiene una velocidad igual a: 43
45 V A = ω x AB Y la segunda es la ecuación de velocidad de movimiento relativo: V A = V o + ω x OA + v Siendo V 0 la velocidad del origen de los ejes de coordenadas intermedios, ω la velocidad angular de los ejes intermedios, OA es la distancia entre el punto A y el origen de los ejes intermedios y v la velocidad relativa del punto A vista desde los ejes intermedios. Una vez explicadas estas fórmulas solo tenemos que aplicarlas con criterio y resolver las incógnitas que se nos plantean. En este caso vamos a calcular la velocidad del punto A, que es el punto de unión de la barra 2 y la barra 3, de la que conocemos la dirección y el módulo, y también vamos a calcular la velocidad del punto B (punto de unión de la barra 3 y 4) con la ecuación de movimiento circular, en la que conoceremos la dirección, y la ecuación de movimiento relativo, en la que conocemos la dirección de la parte angular, y la dirección de la velocidad V B. Para la ecuación del movimiento relativo vamos a colocar los ejes intermedios con centro en A y girando con la barra 3. Según estas indicaciones tenemos lo siguiente: Y x B O1 A O2 X y { V A = ω 2 x } direccion : perpendicularao1 A O 1 A MoDulo : ω 2 x O 1 A = 1 2 = 2 V B = ω 4 x { } direccion : perpendiculara O O 2 B 2 B MoDulo :? V B = V A + ω3 x AB } {{ } direccion:perpendiculara AB { direccion : perpendiculara O 2 B MoDulo :? 44 }
46 ω 3 x AB V A V B Una vez dibujamos las direcciones y módulos que tenemos obtenemos un triángulo con las tres velocidades. Para obtener el valor numérico de la velocidad solo tenemos que hacer una escala. Así por ejemplo, si la velocidad de entrada de la barra 2 en el dibujo mide mm y en la realidad 1 m/s, con medir lo que vale en el papel la velocidad V B ya sabremos su verdadero valor. La medida en el papel es 33.35mm y en la realidad: V B = 33, ,79 = 2,016m/s 4.2. PROBLEMA. En la figura se muestra un mecanismo biela-manivela. Determinar la velocidad del pistón si tenemos un ángulo de entrada θ 2 = 45 o y una velocidad de entrada ω 2 = 1rad/s. Datos: L1 = 2m, L2 = 4m. Resolución 45
47 V A = ω 2 r 2 V B = V A + v ω 3 r 3 = 0 De V A conocemos su dirección y modulo (como ω 2 r 2 son perpendiculares, se puede decir que V A = ω 2 r 2 ). De V B su dirección (dirección vertical). De v su dirección (paralela AB). Midiendo y multiplicando por el factor de escala obtenemos: V P = 1,95 m/s ω 3 = 0,379 rad/s 4.3. PROBLEMA. En la figura se muestra un mecanismo de retorno rápido. Calcular la velocidad del punto B (perteneciente a la barra 4 (barra larga)) para un ángulo de la barra de entrada de θ 2 = 30 o y ω 2 = 1rad/s. Las dimensiones son barra de entrada 2 m, distancia entre centros 4 metros, barra 3 8 m. 46
48 Resolución A es un punto de la barra 2 (barra de entrada), y B pertenece a la barra 4. El eje de coordenadas fijo lo situamos en O 1 (centro de rotación de la barra 2) y el eje intermedio con centro en A y rotando con la barra 4. Y x y X Calculamos la velocidad de A: V A = ω 2 x O 1 A = V A = 1,999m/s x 2 cos30 2 sin30 0 = i j k cos30 2 sin30 0 = 1 1, modulo O 1 A Calculamos la velocidad de B: V B = ω 4 x { direccion : perpendicular O O 2 B 2 B MoDulo :? } Y también con la fórmula del movimiento relativo según los ejes definidos al principio del problema: V B = V A + v + ω 4 x AB } {{ } 0yaque 47 AB=0 = V A + v
49 El vector V B va a ser perpendicular a O 2 B por la ecuación anterior y el v va a ser paralelo al eje x del sistema intermedio, ya que el movimiento relativo que describe para alguien situado en (x,y) es de rectas paralelas a ox. Del vector V A conocemos módulo y dirección. Aplicamos las fórmulas al dibujo y obtenemos: v V A V B Aplicamos el factor de escala al dibujo y obtenemos que la velocidad del punto B es: V B = 19, ,7 = 1,459m/s 4.4. PROBLEMA. La figura muestra una leva excéntrica. Calcular la velocidad del punto B de forma gráfica para un ángulo de entrada igual a 0 o y ω 2 = 1rad/s. Datos: R1 = 2m; L1 = 5m; R2 = 4m; L2 = 4m; O1A = 2m; L3 = 5m. 48
50 Resolución V A = ω 4 r 4 V B = V A + ω 3 AB De igual modo que antes V A = ω 4 r 4. Conocemos dirección y modulo V B conocemos su dirección (vertical) ω 3 AB conocemos su dirección, perpendicular a AB. Midiendo y multiplicando por el factor de escala obtenemos: V A = 2m/s ω 3 = 0,1053rad/s V B = 1,86m/s 4.5. PROBLEMA. En la figura se muestra un yugo inglés. Calcular la velocidad del punto B (perteneciente a la barra 4) si el ángulo de la barra de entrada esθ 2 = 30 o y la velocidad ω 2 = 1rad/s. Las dimensiones son OP = 4 m. 49
51 A O1 Resolución Primero definimos los ejes. El eje fijo lo colocamos en O 1, centro de rotación de la barra de entrada y el eje intermedio (x,y) lo situamos con centro en A y girando con la barra 4, o lo que es lo mismo, no gira. Y y B c 4 A c 2 x O 1 X Calculamos la velocidad del punto A: V A = ω 2 x 0 4 cos30 O 1 A = 0 x 4 sin V A = 4m/s = i j k cos30 4 sin30 0 = 2 3, modulo O 1 A Calculamos la velocidad del punto B: 50
52 V B = V A + v + ω 4 x AB = V } {{ } A + v 0yaque ω 4 =0 La velocidad del punto B sabemos que va a ser paralela al eje X, debido al movimiento del yugo, y la velocidad relativa va a ser paralela al eje y, porque la barra 4 se va a mover hacia arriba y hacia debajo por la guía. Ya tenemos todas las direcciones y módulos necesarios para hacer el gráfico de velocidades: v V A V B Si medimos y le aplicamos el factor de escala obtenemos que: 6,127 4 V B = = 1,732m/s 14, PROBLEMA. Determinar la velocidad del punto C del mecanismo que se muestra en la figura. El ángulo de la barra de entrada es θ 1 = 0 o y la velocidad angular ω 1 = 1rad/s. Datos: L1 = 2m, O1O2 = 8m, L2 = 2m, AC = 8m, L3 = 6m, BC = 8m, L4 = 4m, L5 = 1m. 51
53 Resolución V A = ω 1 r 1 V B = V A + ω 3 AB De igual modo que antes V A = ω 1 r 1. Conocemos dirección y modulo V B conocemos su dirección (horizontal) ω 3 AB conocemos su dirección, perpendicular a AB. Midiendo y multiplicando por el factor de escala obtenemos: V A = 2m/s ω 3 = 0,252rad/s V B = 0,252m/s 4.7. PROBLEMA. En la figura se muestra una rueda escéntrica con una guía por donde se desplaza el bulón de barra 2. Calcular la velocidad del punto B perteneciente a la barra 3 (rueda) si el ángulo de la barra de entrada es θ 2 = 30 o y la velocidad angular ω 1 = 1rad/s. La longitud de la barra 2 es de 3 m, del centro de la rueda al punto sobre el que gira 2 m, y desde ese punto al centro de giro de la barra 2 hay 4 m. 52
54 r 2 r 1 r 3 Resolución Situamos los ejes fijos con centro en O 1 y los intermedios con centro en A y rontando con 2, tal y como se muestra a continuación: Y y A c 2 B c 3 x O 1 O 2 X 53
55 Calculamos la velocidad del punto A: V A = ω 2 x O 1 A = V A = 2,999m/s x 3 cos30 3 sin30 0 = i j k ,598 1,5 0 = 1,5 2,598 0 Calculamos la velocidad del punto B: V B = V A + v + V B = ω 3 x O 2 A ω 2 x AB } {{ } = 0yaque AB=0 V A + v { direccion : perpendicular MoDulo :? O2 A } Del vector V A conocemos todo y de V B la dirección, por lo que solo nos queda analizar el vector v. Un sujeto situado en el eje (x,y) verá el punto B moverse el eje x, por lo que ya conocemos el módulo de este vector. Dibujamos los resultados: a A B α3 x O B A A 3 x O B 3 x 2 Aplicamos el factor de escala y obtenemos que el módulo de la velocidad del punto B vale: 106,06 3 V B = = 13,274m/s 23,97 54
56 4.8. PROBLEMA. La figura muestra la rueda de ginebra. Determinar la velocidad del punto A si el ángulo de la barra de entrada es θ 1 = 0 o y la velocidad angular ω 1 = 1rad/s. Datos: L1 = 3m; O2A = 2m. Resolución V A = ω 1 r 1. El punto A está en la rueda. Midiendo y multiplicando por el factor de escala obtenemos: V A = 2m/s 55
57 Capítulo 5 RELACIÓN 5. ANÁLISIS DE VELOCIDAD. Método Analítico PROBLEMA. En la figura se muestra un mecanismo de cuatro barras. Para un ángulo de entrada θ 2 = 0 o y velocidad de esta barra ω 2 = 1rad/s calcular la velocidad de la barra 4 (barra de salida) aplicando el método analítico. Las dimensiones son: L 1 = 2m, L 2 = 3m, L 3 = 4m, L 4 = 4m. Resolución Podemos aplicar el método analítico de dos formas distintas. Una primera es con las ecuaciones cinemáticas empleadas en el análisis gráfico (relación 4). Una vez tenemos las ecuaciones vectoriales damos los valores a los datos que conozcamos y resolvemos el sistema de ecuaciones resultante sabiendo que cada ecuación vectorial son dos ecuaciones escalares. 56
58 La segunda forma de resolver estos problemas es aplicando ecuaciones de cierre. Este método consiste en definir unos vectores para formar un circuito cerrado y poder plantear una serie de ecuaciones. En algunos problemas tendremos que elegir más de un circuito de vectores. En primer lugar tenemos que plantear la ecuación vectorial y aplicar la notación compleja para los vectores: Y r ky ^ r k r kx X rk = ρ k e jθ k e jθ k = cosθ k + j sin θ k rk = ρ k (cosθ k + j sinθ k ) con k un vector cualquiera. Si derivamos esta expresión con respecto al tiempo tenemos que: d( r k) dt = d(ρ k e jθk ) dt = d(ρ k) dt e jθ k + d(ejθk ) dt ρ k = ρ k e jθ k + j θ k ρ k e jθ k ( r k = ρ k + j θ ) ( k ρ k e jθ k = ρ k + j θ ) k ρ k (cosθ k + j sinθ k ) En segundo lugar elegiremos el o los circuitos de vectores que vamos a emplear para resolver el problema. Se escogerán en función de los datos que nos pregunten en el enunciado del problema o los parámetros que querramos conocer nosotros. Para este problema elegimos los siguientes: r 3 r 4 r 2 r 1 57
59 A continuación tendríamos que resolver el problema de posición para conocer todos los módulos y ángulos de la figura, pero como ya lo hicimos en la relación 2, pasamos a plantear las ecuaciones. r1 + r 2 + r 3 = r 4 r1 + r 2 + r 3 = r 4 ( ρ 2 + j θ ) ( 2 ρ 2 e jθ2 + ρ 3 + j θ ) ( 3 ρ 3 e jθ3 = ρ 4 + j θ ) 4 ρ 4 e jθ4 ( (0 + j 1 2) j θ ) 3 3 ( 0,25 + j 0,97) = { θ3 = 0,567rad/s θ 4 = 0,566rad/s ( 0 + j θ ) 4 4 ( 0,69 + j 0,73) Vemos que los módulos de los vectores son constantes en todos los casos por lo que sus derivadas son nulas. Y lo último que tenemos que realizar una vez calculado los parámetros que desconocíamos es resolver la velocidad del punto B. La velocidad de la barra 4 la podemos calcular como la velocidad del punto B, ya que pertenece a la barra. La velocidad de un punto se calcula como la derivada del vector que une el punto con un punto fijo. Por lo que el resultado es el siguiente: V B = ( r 4 = ρ 4 + j θ ) { 1,65 4 ρ 4 e jθ4 = (0 + j ( 0,566) 4) ( 0,69 + j 0,73) = 1,56 } m/s Si hacemos el módulo de la velocidad observamos que el resultado es parecido al obtenido en la relación 4 y sería igual si las mediciones fuesen exactas PROBLEMA. En la figura se muestra un mecanismo biela-manivela. Determinar la velocidad del pistón si tenemos un ángulo de entrada θ 2 = 45 o y una velocidad de entrada ω 2 = 1rad/s aplicando el método analítico. Datos: L1 = 2m, L2 = 4m. 58
60 Resolución ṙ 2 + ṙ 3 = ṙ 1 ρ 2 e iθ2 + ρ 2 i θ 2 e iθ2 + ρ 3 e iθ3 + ρ 3 i θ 3 e iθ3 = ρ 1 e iθ1 + ρ 1 i θ 1 e iθ1 ρ 2 i θ 2 e iθ2 + ρ 3 i θ 3 e iθ3 = ρ 1 e iθ1 θ 2 ρ 2 sinθ 2 + θ 3 ρ 3 sin θ 3 = ρ 1 cosθ 1 θ 2 ρ 2 cosθ 2 + θ 3 ρ 3 cosθ 3 = ρ 1 senθ 1 ω2ρ2 sin θ2 ω 3 = ρ 3 sin θ 3 = 0,3779 rad/s ρ 1 = θ 2 ρ 2 cosθ 2 + θ 3 ρ 3 cosθ 3 = 1,984 m/s 5.3. PROBLEMA. En la figura se muestra un mecanismo de retorno rápido. Calcular la velocidad del punto B (perteneciente a la barra 4 (barra larga)) para un ángulo de la barra de entrada de θ 2 = 30 o y ω 2 = 1rad/s aplicando el método analítico. Las dimensiones son barra de entrada 2 m, distancia entre centros 4 metros, barra 3 8 m. 59
61 Resolución r 2 r 1 r 3 r1 + r 2 = r 3 r1 + r 2 = r 3 ( ρ 2 + j θ ) ( 2 ρ 2 e jθ2 = ρ 3 + j θ ) 3 ρ 3 e jθ3 ( (0 + j 1 2) 1 = ρ 3 + j θ ) 3 4,43 (0,45 + j 0,89) { θ3 = 0,204rad/s ρ 3 = 1,79m/s La velocidad del punto B la calculamos como la derivada del vector que une un punto fijo con este, y el resultado es el mismo si empleamos r 2 o r 3. 60
62 V B = ( r 3 = ρ 3 + j θ ) { 0, ρ 3 e jθ3 = (1,79 + j 0,904) (0,45 + j 0,89) = 1,594 } m/s 5.4. PROBLEMA. La figura muestra una leva excéntrica. Calcular la velocidad del punto B de forma gráfica para un ángulo de entrada igual a 0 o y ω 2 = 1rad/s aplicando el método analítico. Datos: R1 = 2m; L1 = 5m; R2 = 4m; L2 = 4m; O1A = 2m; L3 = 5m. Resolución 61
63 ṙ 1 + ṙ 2 + ṙ 3 = ṙ 4 ρ 1 e iθ1 + ρ 1 ω 1 ie iθ1 + ρ 2 e iθ2 + ρ 2 ω 2 ie iθ2 + ρ 3 e iθ3 + ρ 3 ω 3 ie iθ3 = ρ 4 e iθ4 + ρ 4 ω 4 ie iθ4 ρ 1 = ω 1 = ρ 2 = ρ 3 = ρ 4 = 0 ρ 2 ω 2 sin θ 2 + ρ 3 ω 3 sinθ 3 = 0 ρ 2 ω 2 cosθ 2 + ρ 3 ω 3 cosθ 3 = ρ 4 ω 4 ρ3ω3 sin θ3 ω 2 = ρ 2 sin θ 2 = 0,3714 rad/s ρ ω 3 = ( 4ω 4 sin θ3 ) = 0,1045 rad/s ρ 3 tgθ +cos θ 3 2 V B = ρ 2 ω 2 ie iθ2 = (0,581, 1,7636) m/s V B = 1,856 m/s 5.5. PROBLEMA. En la figura se muestra un yugo inglés. Calcular la velocidad del punto B (perteneciente a la barra 4) si el ángulo de la barra de entrada esθ 2 = 30 o y la velocidad ω 2 = 1rad/s aplicando el método analítico. Las dimensiones son OP = 4 m. A O1 Resolución 62
64 r 2 r 3 r 1 r1 = r 2 + r 3 r1 = r 2 + r 3 ( ρ 1 + j θ ) ( 1 ρ 1 e jθ1 = ρ 2 + j θ ) ( 2 ρ 2 e jθ2 + ρ 3 + j θ ) 3 ρ 3 e jθ3 ( ρ 1 + j 0 3,464 2) ( 1) = (0 + j 4 1) (0,86 + j0,5) + ( ρ 3 + j 0 2) ( j) { ρ1 = 2m/s ρ 3 = 3,46m/s Una vez calculados todos los parámetros podemos resolver la velocidad del punto B: V B = ( r 1 = ρ 1 + j θ ) { 2 1 ρ 1 e jθ1 = (2 + j 0) ( 1 + j 0) = 0 } m/s 5.6. PROBLEMA. Determinar la velocidad del punto C del mecanismo que se muestra en la figura aplicando el método analítico. El ángulo de la barra de entrada es θ 1 = 0 o y la velocidad angular ω 1 = 1rad/s. Datos: L1 = 2m, O1O2 = 8m, L2 = 2m, AC = 8m, L3 = 6m, BC = 8m, L4 = 4m, L5 = 1m. 63
65 Resolución ṙ 1 + ṙ 3 + ṙ 8 = ṙ 9 ρ 1 e iθ1 + ρ 1 ω 1 ie iθ1 + ρ 3 e iθ3 + ρ 3 ω 3 ie iθ3 + ρ 8 e iθ8 + ρ 8 ω 8 ie iθ8 = ρ 9 e iθ9 + ρ 9 ω 9 ie iθ9 ρ 1 = ω 8 = ω 9 = ρ 3 = ρ 8 = 0 ρ 3 ω 3 sin θ 3 = ρ 9 ρ 1 ω 1 + ρ 3 ω 3 cosθ 3 = 0 ω 3 = ρ1ω1 ρ 3 cos θ 3 = 0,252 rad/s ρ 9 = ρ 1 ω 1 tgθ 3 = 0,255 m/s V B = ρ 9 e iθ9 = ( 0,255, 0) m/s V B = 0,255 m/s 5.7. PROBLEMA. En la figura se muestra una rueda escéntrica con una guía por donde se desplaza el bulón de barra 2. Calcular la velocidad del punto B perteneciente a la barra 3 (rueda) si el ángulo de la barra de entrada es θ 2 = 30 o y la velocidad angular ω 1 = 1rad/s aplicando el método analítico. La longitud de la barra 2 es de 3 m, del centro de la rueda al punto sobre el que gira 2 m, y desde ese punto al centro de giro de la barra 2 hay 4 m. 64
66 r 2 r 1 r 3 Resolución r 2 r 3 r 1 r1 = r 2 + r 3 r1 = r 2 + r 3 0 = ( ρ 2 + j θ ) ( 2 ρ 2 e jθ2 + ρ 3 + j θ ) 3 ρ 3 e jθ3 3 ) 0 = (0 + j 3 1)( 2 + j 0,5 + { θ3 = 4,585rad/s ρ 3 = 8,50m/s ( ρ 3 + j θ ) 3 2,053 ( 0,98 + j0,73) 65
67 Como la velocidad de un punto es la derivada del vector que une un punto fijo cualquiera con el punto en cuestión, planteamos la velocidad del punto B de la siguiente manera: V B = ( r 3 = ρ 3 + j θ ) { 2,51 3 ρ 3 e jθ3 = ( 8,50 + j4,585) ( 0,98 + j0,73) = 5,11 } m/s 5.8. PROBLEMA. La figura muestra la rueda de ginebra. Determinar la velocidad del punto A si el ángulo de la barra de entrada es θ 1 = 0 o y la velocidad angular ω 1 = 1rad/s aplicando el método analítico. Datos: L1 = 3m; O2A = 2m. Resolución V A = ṙ 1 = ρ 1 ω 1 ie iθ1 = (0, 2) m/s V A = 2 m/s 66
68 Capítulo 6 RELACIÓN 6. ANÁLISIS DE ACELERACIÓN. Método Gráfico PROBLEMA. En la figura se muestra un mecanismo de cuatro barras. Para un ángulo de entrada θ 2 = 0 o y velocidad de esta barra ω 2 = 1rad/s y aceleración α 2 = 1rad/s 2 calcular la aceleración de la barra 4 (barra de salida). Las dimensiones son: L 1 = 2m, L 2 = 3m, L 3 = 4m, L 4 = 4m. Resolución La resolución del problema es igual que para el caso de la velocidad pero cambiando la fórmula por la de aceleración y la resolución es idéntica pero más laboriosa. ejes intermedios: origen en O 1 y girando con 2. 67
69 A A = A O1 + ω2 x( ω 2 x r O1A) }{{} } {{ } x 0 x cosθ 2 2 sinθ α2 x r O1A } {{ } 0 0 x 1 2 cosθ 2 2 sin θ 2 0 = ejes intermedios en A y girando con 3: A B = A }{{} A ω 3 x( ω 3 x r AB ) } {{ } AB + α 3 x r AB } {{ } AB ejes intermedios en O 2 y girando con 4: A B = A O2 + ω 4 x( ω 4 xr O2B) }{{} } {{ } + α 4 x r O2B } {{ } 0 O 2B O 2B Si medimos en el análisis de velocidad gráfico el vector ω 3 x AB y el vector VB y los transformamos a unidades reales obtenemos ω 3 y ω 4. V B = ω4 x r AB ω 4 = 2 3 = 0,66rad/s ω 3 x r AB = 1,463 ω 3 = 1,463 3 = 0,487rad/s 68
70 B A A A B 4 3 x AB 3 x x O B 4 x 2 3 x AB O A O 2 1 Si medimos en el papel la longitud de la flecha y le aplicamos el factor de escala obtenemos que la aceleración del punto B es: A B = 17,18 2 = 1,718m/s PROBLEMA. En la figura se muestra un mecanismo biela-manivela. Determinar la aceleración del pistón si tenemos un ángulo de entrada θ 2 = 0 y una velocidad de entrada ω 2 = 1rad/sm y aceleración α 2 = 1rad/s 2. Datos: L1 = 2m, L2 = 4m. 69
71 Resolución A P A A = α 3 r 3 + ω 3 ω 3 r 3 Midiendo obtenemos: A p = 2,67m/s 2 ; α 3 = 0,324 rad/s 2 La solución es: Ap = 5,341 2,2 4,4 = 2,67 m/s PROBLEMA. En la figura se muestra un mecanismo de retorno rápido. Calcular la aceleración del punto B (perteneciente a la barra 4 (barra larga)) para un ángulo de la barra de entrada de θ 2 = 30 o y ω 2 = 1rad/s y aceleración α 2 = 1rad/s 2. Las dimensiones son barra de entrada 2 m, distancia entre centros 4 metros, barra 3 8 m. 70
72 Resolución ejes intermedios con centro en A 2 y girando con 3 A B = + α 3 x r AB A A + ω 3 x( ω 3 x r AB ) } {{ } } {{ } 0,A=B 0,A=B + ω2 x( ω 2 x r O1A) A A = A O1 }{{} } {{ } 0 x 0 x 1 2 cosθ 2 2 sinθ a + 2 ω 3 x v = A A + a }{{} 0 2B + α2 x r O1A } {{ } 0 0 x 1 2 cosθ 2 2 sinθ ω 3 x v ejes intermedios en O 2 y girando con 3: A B = ω 3 x( ω 3 xr O2B) } {{ } + α 3 x r O2B } {{ } O 2B O 2B Del análisis de velocidad gráfico obtenemos el módulo de v (1.37m/s) y el módulo de ω 3 como V B /O 2 B (0.326rad/s). Otra cosa que tenemos que tener en cuenta es la velocidad relativa de a, que es O 2 B porque se mueve sobre 3. Con las fórmulas y estos datos podemos dibujar lo siguiente: 71
73 a 0.89 A A A B α 3 x O B 2 ω 3 xω 3 x O B 2 O 1 O 2 Midiendo la aceleración y aplicándole el factor de escala sale un valor de la aceleración del punto B de : A B = 27,32 2 = 2,732m/s PROBLEMA. La figura muestra una leva excéntrica. Calcular la aceleración del punto B de forma gráfica para un ángulo de entrada igual a 0 o y ω 2 = 1rad/s y α 2 = 1rad/s 2. Datos: R1 = 2m; L1 = 5m; R2 = 4m; L2 = 4m; O1A = 2m; L3 = 5m. 72
74 Resolución A A = A T + A N = α 4 r 4 + ω 4 ω 4 r 4 Ponemos un eje con centro en A que gira con 3: A B A A = α 3 r 3 + ω 3 ω 3 r 3 Ponemos un eje con centro en C que gira con 2: A B A C = α 2 r 2 + ω 2 ω 2 r 2 Midiendo obtenemos: α 3 = 1,026 rad/s 2 La solución es: α 2 = 0, = 0,33 rad/s 2 A B = α 2 r 2 + ω 2 2 r 2 = 2,33 m/s PROBLEMA. En la figura se muestra un yugo inglés. Calcular la aceleración del punto B (perteneciente a la barra 4) si el ángulo de la barra de entrada esθ 2 = 30 o y la velocidad ω 2 = 1rad/s y aceleración α 2 = 1rad/s 2 aplicando el método analítico. Las dimensiones son OP = 4 m. 73
75 A O1 Resolución ejes intermedios con centro en A y girando con 3: A B = A A + ω 3 x( ω 3 x r AB ) } {{ } 0,A=B + α 3 x r AB } {{ } 0,A=B + a + 2 ω 3 x v = A A + a }{{} 0 2B +2 ω 3 x v A A = ω2 x( ω 2 x r O1A) } {{ } 0 x 0 x 1 2 cosθ 2 2 sin θ α2 x r O1A } {{ } 0 0 x 1 2 cosθ 2 2 sinθ 2 0 = 5,46 1,46 0 La dirección de A B es paralela al eje ox mientras que ω 3 es 0 porque la barra 3 no gira. También hay que saber que la velocidad relativa a es paralela al eje oy porque 4 no gira y se desplaza sobre la guía. Con estas consideraciones podemos hacer el siguiente dibujo: 74
76 a A A B A A B O 1 Tomamos la medida de la aceleración de B y la multiplicamos por el factor de escala: A B = 1 54,6 = 5,46m/s PROBLEMA. Determinar la aceleración del punto C del mecanismo que se muestra en la figura. El ángulo de la barra de entrada es θ 1 = 0 o y la velocidad angular ω 1 = 1rad/s y aceleración α 2 = 1rad/s 2. Datos: L1 = 2m, O1O2 = 8m, L2 = 2m, AC = 8m, L3 = 6m, BC = 8m, L4 = 4m, L5 = 1m. Resolución 75
77 Calculamos la Aceleración del punto A: A A = A T + A N = α 1 r 1 + ω 1 ω 1 r 1 Para calcular la aceleración del punto C, ponemos un eje con centro en A,que gira con 3: A C A A = α 3 r 3 + ω 3 ω 3 r 3 Midiendo obtenemos: A p = 2,391 1,87 2,805 = 1,59 m/s PROBLEMA. En la figura se muestra una rueda escéntrica con una guía por donde se desplaza el bulón de barra 2. Calcular la aceleración del punto B perteneciente a la barra 3 (rueda) si el ángulo de la barra de entrada es θ 2 = 30 o y la velocidad angular ω 1 = 1rad/s y aceleración α 2 = 1rad/s 2. La longitud de la barra 2 es de 3 m, del centro de la rueda al punto sobre el que gira 2 m, y desde ese punto al centro de giro de la barra 2 hay 4 m. r 2 r 1 r 3 76
78 Resolución Situamos los ejes intermedios con centro en A y rotando con 2. A A = ω2 x( ω 2 x r O1A) } {{ } cosθ 2 0 x 0 x 2 sin θ A B = A A + ω 3 x( ω 3 x r AB ) } {{ } + α 3 x r } {{ AB } 0,A=B 0,A=B A B = ω 3 x( ω 3 xr O2B) + α 3 x r O2 B + α2 x r O1A } {{ } 0 0 x 1 2 cosθ 2 2 sinθ a + 2 ω 3 x v = A A + a = }{{} v 4,09 1, ω 3 x v } {{ } v conocemos la dirección y módulo de v ya que los calculamos en el análisis gráfico de velocidad y ω 3 que lo calculamos como: ω 3 = V B r = 13,274 O2B 3 77 = 4,42rad/s
79 78
80 Aplicamos el factor de escala a la medida tomada en el gráfico y obtenemos una aceleración del punto B de: A B = = 295m/s PROBLEMA. La figura muestra la rueda de ginebra. Determinar la aceleración del punto A si el ángulo de la barra de entrada es θ 1 = 0 o y la velocidad angular ω 1 = 1rad/s y la aceleración α 2 = 1rad/s 2. Datos: L1 = 3m; O2A = 2m. Resolución Para calcular la aceleración de A: A A = A T + A N = α 2 r 2 + ω 2 ω 2 r 2 79
81 De modo que midiendo: A p = 2, = 2,838 m/s 2 80
82 Capítulo 7 RELACIÓN 7. ANÁLISIS DE ACELERACIÓN. Método Analítico PROBLEMA. En la figura se muestra un mecanismo de cuatro barras. Para un ángulo de entrada θ 2 = 0 o y velocidad de esta barra ω 2 = 1rad/s y aceleración α 2 = 1rad/s 2 calcular la velocidad de la barra 4 (barra de salida) aplicando el método analítico. Las dimensiones son: L 1 = 2m, L 2 = 3m, L 3 = 4m, L 4 = 4m. Resolución El procedimiento para resolver los problemas de aceleración con el método analítico es el mismo que el del problema de velocidad pero empleando las expresiones de aceleración, que resulta de derivar dos veces la definición compleja del vector como se puede ver a continuación: 81
83 r k = (ρ k ) e jθ k r k = ( ρ k + j θ k ρ k ) e jθ k r k ( ρ = k + j θ k ρ k + 2j θ k ρ k θ ) k 2ρ k e jθ k Como ya tenemos resuelto el análisis de posición y de velocidad para la siguiente posición solo tenemos que resolver las ecuaciones obtenidas con la aceleración. r 3 r 4 r 2 r 1 r1 + r 2 + r 3 = r 4 r1 + r 2 + r 3 = r 4 r1 + r 2 + r 3 = r 4 ( ρ 2 + j θ 2 ρ 2 + 2j θ 2 ρ 2 θ ) 2 2ρ 2 (j ) 1 + { θ3 = 0,567rad/s 2 θ 4 = 0,566rad/s 2 ( e jθ2 + ( j θ 3 3 0,321 3 ρ 3 + j θ 3 ρ 3 + 2j θ 3 ρ 3 θ ) ( 3 2ρ 3 e jθ3 = ρ 4 + j θ 4 ρ 4 + 2j θ 4 ρ 4 θ ) 4 2ρ 4 e jθ4 ) ( ) ( 0,25 + j 0,97) = j θ 4 4 0,320 4 ( 0,69 + j 0,73) Calculamos la aceleración de B con el vector r 4 y obtenemos: A B = ( r 4 = ρ 4 + j θ 4 ρ 4 + 2j θ 4 ρ 4 θ ) 4 2ρ 4 e jθ4 = = (j ( 0,566) 4 0,320 4) ( 0,69 + j 0,73) = { 1,214 1,34 } m/s PROBLEMA. En la figura se muestra un mecanismo biela-manivela. Determinar la velocidad del pistón si tenemos un ángulo de entrada θ 2 = 0 y una velocidad de entrada ω 2 = 1rad/s y aceleración α 2 = 1rad/s 2 aplicando el método analítico. Datos: L1 = 2m, L2 = 4m. 82
84 Resolución Derivamos la ecuación de triangulación: ( ρ 2 θ 2 2 ρ 2)e iθ2 +(2 ρ 2 θ2 + θ 2 ρ 2 )ie iθ2 +( ρ 3 θ 2 3 ρ 3)e iθ3 +(2 ρ 3 θ3 + θ 3 ρ 3 )ie iθ3 = ( ρ 1 θ 2 1 ρ 1)e iθ1 +(2 ρ 1 θ1 + θ 1 ρ 1 )ie iθ1 Como ρ 2 = ρ 3 = θ 1 = 0 : { Real : θ2 ρ 2 θ 3 ρ 3 cosθ 3 + θ 3 ρ 3 senθ 3 = 0 Imag : θ 2 ρ 2 θ 3 ρ 3 senθ 3 + θ 3 ρ 3 cosθ 3 = ρ 1 Despejando y sustituyendo α 3 = ω2 2 ρ2senθ2 ω2 3 ρ3cosθ3 ρ 3senθ 3 = 0,324 rad/s 2 ρ 1 = α 2 ρ 2 senθ 2 + α 3 ρ 3 cosθ 3 + ω 2 3ρ 3 senθ 3 = 2,4 m/s 2 De modo que: A P = r 2 = ( ρ 2 + j θ 2 ρ 2 + 2j θ 2 ρ 2 θ 2 2ρ 2 )e jθ2 = (0, 3) A P = 3 m/s 2 83
85 7.3. PROBLEMA. En la figura se muestra un mecanismo de retorno rápido. Calcular la velocidad del punto B (perteneciente a la barra 4 (barra larga)) para un ángulo de la barra de entrada de θ 2 = 30 o y ω 2 = 1rad/s y aceleración α 2 = 1rad/s 2 aplicando el método analítico. Las dimensiones son barra de entrada 2 m, distancia entre centros 4 metros, barra 3 8 m. Resolución r 2 r 1 r 3 84
86 r 2 = r 3 r 2 3 ( ) ( ) ρ 2 + j θ 2 ρ 2 + 2j θ 2 ρ 2 θ 2 2ρ 2 e jθ2 = ρ 3 + j θ 3 ρ 3 + 2j θ 3 ρ 3 θ 3 2ρ 3 e jθ3 (0 + j j ) 1 = { θ3 = 0,758rad/s 2 ρ 3 = 2,32m/s 2 ( ρ 3 + j θ ) 3 4, j 0,204 1,79 0,041 4,43 (0,45 + j 0,89) A B = r 3 = ( ρ 3 + j θ 3 ρ 3 + 2j θ 3 ρ 3 θ ) 3ρ 2 3 e jθ3 = = {(2,32 + j } 0,758 4, j 0,204 1,79 0,041 4,43) (0,45 + j 0,89) = 0,47 = m/s 2, PROBLEMA. La figura muestra una leva excéntrica. Calcular la velocidad del punto B de forma gráfica para un ángulo de entrada igual a 0 o y ω 2 = 1rad/s y aceleración α 2 = 1rad/s 2 aplicando el método analítico. Datos: R1 = 2m; L1 = 5m; R2 = 4m; L2 = 4m; O1A = 2m; L3 = 5m. Resolución 85
87 r 1 = 0; ( ρ 2 θ 2 2 ρ 2)e iθ2 + (2 ρ 2 θ2 + θ 2 ρ 2 )ie iθ2 + ( ρ 3 θ 2 3 ρ 3)e iθ3 + (2 ρ 3 θ3 + θ 3 ρ 3 )ie iθ3 = ( ρ 4 θ 2 4 ρ 4)e iθ4 + (2 ρ 4 θ4 + θ 4 ρ { Real : θ2 2 ρ 2 cosθ 2 + α 2 ρ 2 senθ 2 θ 2 3 ρ 3 cosθ 3 + θ 3 ρ 3 senθ 3 = θ 2 4 ρ 4 Imag : θ 2 2ρ 2 senθ 2 + α 2 ρ 2 cosθ 2 θ 2 3ρ 3 senθ 3 + θ 3 ρ 3 cosθ 3 = θ 4 ρ 4 α 2 = θ 2 4 ρ4+ θ 2 2 ρ2 cos θ2+ θ 2 3 ρ3 cos θ3 θ 3ρ 3senθ 3 ρ 2senθ 2 = 0,3327rad/s 2 θ 3 = θ 4ρ 4+ θ 2 2 ρ2senθ2+ θ 3 2 ρ3senθ3 α2ρ2 cos θ2 ρ 3cosθ 3 = 1,026rad/s 2 A P = r 2 = ( ρ 2 + j θ 2 ρ 2 + 2j θ 2 ρ 2 θ 2 2 ρ 2)e jθ2 = (1,175, 1,795) A P = 2,146 m/s PROBLEMA. En la figura se muestra un yugo inglés. Calcular la velocidad del punto B (perteneciente a la barra 4) si el ángulo de la barra de entrada esθ 2 = 30 o y la velocidad ω 2 = 1rad/s y aceleración α 2 = 1rad/s 2 aplicando el método analítico. Las dimensiones son OP = 4 m. A O1 86
88 Resolución r 2 r 3 r 1 r1 = r 2 + r 3 r ( 1 = r 2 + r 3 ρ 1 + j θ 1 ρ 1 + 2j θ 1 ρ 1 θ ) 1 2ρ 1 e jθ1 = ( ρ 2 + j θ 2 ρ 2 + 2j θ 2 ρ 2 θ ) ( 2 2ρ 2 e jθ2 + ρ 3 + j θ 3 ρ 3 + 2j θ 3 ρ 3 θ ) 3 2ρ 3 e jθ3 ( ρ 1 + j j ) e jθ1 = (0 + j j ) (0,86 + j0,5)+ + ( ρ 3 + j j 0 2,24 0 2) e jθ3 { ρ1 = 3,71m/s 2 ρ 3 = 5,23m/s 2 A B = r 1 = ( ρ 1 + j θ 1 ρ 1 + 2j θ 1 ρ 1 θ ) 1ρ 2 1 e jθ1 = = {(3,71 + j } j ) ( 1 + 0j) = 5,46 = m/s PROBLEMA. Determinar la velocidad del punto C del mecanismo que se muestra en la figura aplicando el método analítico. El ángulo de la barra de entrada es θ 1 = 0 o y la velocidad angular ω 1 = 1rad/s y aceleración α 2 = 1rad/s 2. Datos: L1 = 2m, O1O2 = 8m, L2 = 2m, AC = 8m, L3 = 6m, BC = 8m, L4 = 4m, L5 = 1m. 87
89 Resolución { Real : θ2 1 ρ 1 θ 2 3ρ 3 cosθ 3 + θ 3 ρ 3 senθ 3 = ρ 9 Imag : θ 2 1 ρ 1 θ 2 3 ρ 3senθ 3 + θ 3 ρ 3 cosθ 3 = 0 θ 3 = θ 2 1 ρ1+ θ 2 3 ρ3senθ3 ρ 3cosθ 3 = 0,126rad/s 2 θ 2 1 ρ 1 θ 2 3 ρ 3 cosθ 3 + θ 3 ρ 3 senθ 3 = ρ 9 = 1,273m/s 2 A P = r 8 + r 9 = ( ρ 9, 0) = ( 1,273, 0) A P = 1,273 m/s PROBLEMA. En la figura se muestra una rueda escéntrica con una guía por donde se desplaza el bulón de barra 2. Calcular la velocidad del punto B perteneciente a la barra 3 (rueda) si el ángulo de la barra de entrada es θ 2 = 30 o y la velocidad angular ω 1 = 1rad/s y aceleración α 2 = 1rad/s 2 aplicando el método analítico. La longitud de la barra 2 es de 3 m, del centro de la rueda al punto sobre el que gira 2 m, y desde ese punto al centro de giro de la barra 2 hay 4 m. 88
90 r 2 r 1 r 3 Resolución r 2 r 3 r 1 r 1 = r 2 + r 3 r 1 = r 2 + r 3 ( ρ 1 + j θ 1 ρ 1 + 2j θ 1 ρ 1 θ ) 1ρ 2 1 e jθ1 = ( ρ 2 + j θ 2 ρ 2 + 2j θ 2 ρ 2 θ ) 2ρ 2 2 e jθ2 + ( ρ 3 + j θ 3 ρ 3 + 2j θ 3 ρ 3 θ ) 3ρ 2 3 e jθ3 0 = (0 + j j ) ( 3 ( 0,98 + j0,73) { θ3 = rad/s 2 ρ 3 = m/s j 0,5 ) + 89 ( ρ 3 + j θ ) 3 2, j 4,585 ( 8,50) 4, ,053
91 Sustituyendo los valores obtenidos en la ecuación de la aceleración del punto B: A B = ( r 2 = ρ 2 + j θ 2 ρ 2 + 2j θ 2 ρ 2 θ ) { } 2 2 ρ 2 e jθ2 = m/s 2 Como podemos ver no era necesario calcular los parámetros que hemos obtenido aunque pueden ser útiles para otro tipo de preguntas de otras velocidades y aceleraciones PROBLEMA. La figura muestra la rueda de ginebra. Determinar la velocidad del punto A si el ángulo de la barra de entrada es θ 1 = 0 o y la velocidad angular ω 1 = 1rad/s y aceleración α 2 = 1rad/s 2 aplicando el método analítico. Datos: L1 = 3m; O2A = 2m. Resolución 90
92 Para calcular la aceleración simplemente sustituimos: A p = r 2 = ρ 2 ω 2 + iα 2 ρ 2 = 2,838 m/s 2 91
Muchas veces hemos visto un juego de billar y no nos percatamos de los movimientos de las bolas (ver gráfico 8). Gráfico 8
. Gráfico 8") Esta semana estudiaremos la definición de vectores y su aplicabilidad a muchas situaciones, particularmente a las relacionadas con el movimiento. Por otro lado, se podrán establecer las características
Esta semana estudiaremos la definición de vectores y su aplicabilidad a muchas situaciones, particularmente a las relacionadas con el movimiento. Por otro lado, se podrán establecer las características
Definición de vectores
 Definición de vectores Un vector es todo segmento de recta dirigido en el espacio. Cada vector posee unas características que son: Origen: O también denominado Punto de aplicación. Es el punto exacto sobre
Definición de vectores Un vector es todo segmento de recta dirigido en el espacio. Cada vector posee unas características que son: Origen: O también denominado Punto de aplicación. Es el punto exacto sobre
Problemas de Cinemática 1 o Bachillerato
 Problemas de Cinemática 1 o Bachillerato 1. Sean los vectores a = i y b = i 5 j. Demostrar que a + b = a + b a b cos ϕ donde ϕ es el ángulo que forma el vector b con el eje X.. Una barca, que lleva una
Problemas de Cinemática 1 o Bachillerato 1. Sean los vectores a = i y b = i 5 j. Demostrar que a + b = a + b a b cos ϕ donde ϕ es el ángulo que forma el vector b con el eje X.. Una barca, que lleva una
SOLUCIONES CIRCUNFERENCIA. 1. Ecuación de la circunferencia cuyo centro es el punto (1, 2) y que pasa por el punto (2,3).
 y que pasa por el punto (2,3).") SOLUCIONES CIRCUNFERENCIA 1. Ecuación de la circunferencia cuyo centro es el punto (1,) y que pasa por el punto (,). Para determinar la ecuación de la circunferencia es necesario conocer el centro y el
SOLUCIONES CIRCUNFERENCIA 1. Ecuación de la circunferencia cuyo centro es el punto (1,) y que pasa por el punto (,). Para determinar la ecuación de la circunferencia es necesario conocer el centro y el
2º Tema.- Ampliación de análisis cinemático de mecanismos planos mediante métodos analíticos.
 Universidad de Huelva ESCUELA POLITECNICA SUPERIOR Departamento de Ingeniería Minera, Mecánica y Energética Asignatura: Ingeniería de Máquinas [570004027] 5º curso de Ingenieros Industriales 2º Tema.-
Universidad de Huelva ESCUELA POLITECNICA SUPERIOR Departamento de Ingeniería Minera, Mecánica y Energética Asignatura: Ingeniería de Máquinas [570004027] 5º curso de Ingenieros Industriales 2º Tema.-
Esta es la forma vectorial de la recta. Si desarrollamos las dos posibles ecuaciones, tendremos las ecuaciones paramétricas de la recta:
 Todo el mundo sabe que dos puntos definen una recta, pero los matemáticos son un poco diferentes y, aún aceptando la máxima universal, ellos prefieren decir que un punto y un vector nos definen una recta.
Todo el mundo sabe que dos puntos definen una recta, pero los matemáticos son un poco diferentes y, aún aceptando la máxima universal, ellos prefieren decir que un punto y un vector nos definen una recta.
Geometría analítica. Impreso por Juan Carlos Vila Vilariño Centro I.E.S. PASTORIZA
 Conoce los vectores, sus componentes y las operaciones que se pueden realizar con ellos. Aprende cómo se representan las rectas y sus posiciones relativas. Impreso por Juan Carlos Vila Vilariño Centro
Conoce los vectores, sus componentes y las operaciones que se pueden realizar con ellos. Aprende cómo se representan las rectas y sus posiciones relativas. Impreso por Juan Carlos Vila Vilariño Centro
_ Antología de Física I. Unidad II Vectores. Elaboró: Ing. Víctor H. Alcalá-Octaviano
 24 Unidad II Vectores 2.1 Magnitudes escalares y vectoriales Unidad II. VECTORES Para muchas magnitudes físicas basta con indicar su valor para que estén perfectamente definidas y estas son las denominadas
24 Unidad II Vectores 2.1 Magnitudes escalares y vectoriales Unidad II. VECTORES Para muchas magnitudes físicas basta con indicar su valor para que estén perfectamente definidas y estas son las denominadas
9 Geometría. analítica. 1. Vectores
 9 Geometría analítica 1. Vectores Dibuja en unos ejes coordenados los vectores que nacen en el origen de coordenadas y tienen sus extremos en los puntos: A(, ), B(, ), C(, ) y D(, ) P I E N S A C A L C
9 Geometría analítica 1. Vectores Dibuja en unos ejes coordenados los vectores que nacen en el origen de coordenadas y tienen sus extremos en los puntos: A(, ), B(, ), C(, ) y D(, ) P I E N S A C A L C
EJERCICIOS RESUELTOS 1º DE BACHILLERATO (Hnos. Machado): EJERCICIOS DE REFUERZO 1º EVALUACIÓN (Cinemática) Por Álvaro Téllez Róbalo
: EJERCICIOS DE REFUERZO 1º EVALUACIÓN (Cinemática) Por Álvaro Téllez Róbalo") EJERCICIOS RESUELTOS 1º DE BACHILLERATO (Hnos. Machado): EJERCICIOS DE REFUERZO 1º EVALUACIÓN (Cinemática) Por Álvaro Téllez Róbalo 1. El vector posición de un punto, en función del tiempo, viene dado
EJERCICIOS RESUELTOS 1º DE BACHILLERATO (Hnos. Machado): EJERCICIOS DE REFUERZO 1º EVALUACIÓN (Cinemática) Por Álvaro Téllez Róbalo 1. El vector posición de un punto, en función del tiempo, viene dado
8 Geometría. analítica. 1. Vectores
 Geometría analítica 1. Vectores Dibuja en unos ejes coordenados los vectores que nacen en el origen de coordenadas y tienen sus extremos en los puntos: A(, ), B(, ), C(, ) y D(, ) P I E N S A C A L C U
Geometría analítica 1. Vectores Dibuja en unos ejes coordenados los vectores que nacen en el origen de coordenadas y tienen sus extremos en los puntos: A(, ), B(, ), C(, ) y D(, ) P I E N S A C A L C U
3.1 DEFINICIÓN. Figura Nº 1. Vector
 3.1 DEFINICIÓN Un vector (A) una magnitud física caracterizable mediante un módulo y una dirección (u orientación) en el espacio. Todo vector debe tener un origen marcado (M) con un punto y un final marcado
3.1 DEFINICIÓN Un vector (A) una magnitud física caracterizable mediante un módulo y una dirección (u orientación) en el espacio. Todo vector debe tener un origen marcado (M) con un punto y un final marcado
1. Vectores 1.1. Definición de un vector en R2, R3 (Interpretación geométrica), y su generalización en Rn.
, y su generalización en Rn.") 1. VECTORES INDICE 1.1. Definición de un vector en R 2, R 3 (Interpretación geométrica), y su generalización en R n...2 1.2. Operaciones con vectores y sus propiedades...6 1.3. Producto escalar y vectorial
1. VECTORES INDICE 1.1. Definición de un vector en R 2, R 3 (Interpretación geométrica), y su generalización en R n...2 1.2. Operaciones con vectores y sus propiedades...6 1.3. Producto escalar y vectorial
Vectores: Producto escalar y vectorial
 Nivelación de Matemática MTHA UNLP 1 Vectores: Producto escalar y vectorial Versores fundamentales Dado un sistema de coordenadas ortogonales, se considera sobre cada uno de los ejes y coincidiendo con
Nivelación de Matemática MTHA UNLP 1 Vectores: Producto escalar y vectorial Versores fundamentales Dado un sistema de coordenadas ortogonales, se considera sobre cada uno de los ejes y coincidiendo con
Apoyo para la preparación de los estudios de Ingeniería y Arquitectura Física (Preparación a la Universidad) Unidad 4: Vectores
 Unidad 4: Vectores") Apoyo para la preparación de los estudios de Ingeniería y Arquitectura Física (Preparación a la Universidad) Unidad 4: Vectores Universidad Politécnica de Madrid 5 de marzo de 2010 2 4.1. Planificación
Apoyo para la preparación de los estudios de Ingeniería y Arquitectura Física (Preparación a la Universidad) Unidad 4: Vectores Universidad Politécnica de Madrid 5 de marzo de 2010 2 4.1. Planificación
MATEMÁTICAS para estudiantes de primer curso de facultades y escuelas técnicas
 Universidad de Cádiz Departamento de Matemáticas MATEMÁTICAS para estudiantes de primer curso de facultades y escuelas técnicas Tema 4 La recta en el plano Elaborado por la Profesora Doctora María Teresa
Universidad de Cádiz Departamento de Matemáticas MATEMÁTICAS para estudiantes de primer curso de facultades y escuelas técnicas Tema 4 La recta en el plano Elaborado por la Profesora Doctora María Teresa
6. VECTORES Y COORDENADAS
 6. VECTORES Y COORDENADAS Página 1 Traslaciones. Vectores Sistema de referencia. Coordenadas. Punto medio de un segmento Ecuaciones de rectas. Paralelismo. Distancias Página 2 1. TRASLACIONES. VECTORES
6. VECTORES Y COORDENADAS Página 1 Traslaciones. Vectores Sistema de referencia. Coordenadas. Punto medio de un segmento Ecuaciones de rectas. Paralelismo. Distancias Página 2 1. TRASLACIONES. VECTORES
COORDENADAS CURVILINEAS
 CAPITULO V CALCULO II COORDENADAS CURVILINEAS Un sistema de coordenadas es un conjunto de valores que permiten definir unívocamente la posición de cualquier punto de un espacio geométrico respecto de un
CAPITULO V CALCULO II COORDENADAS CURVILINEAS Un sistema de coordenadas es un conjunto de valores que permiten definir unívocamente la posición de cualquier punto de un espacio geométrico respecto de un
A continuación voy a colocar las fuerzas que intervienen en nuestro problema.
 ísica EL PLANO INCLINADO Supongamos que tenemos un plano inclinado. Sobre él colocamos un cubo, de manera que se deslice sobre la superficie hasta llegar al plano horizontal. Vamos a suponer que tenemos
ísica EL PLANO INCLINADO Supongamos que tenemos un plano inclinado. Sobre él colocamos un cubo, de manera que se deslice sobre la superficie hasta llegar al plano horizontal. Vamos a suponer que tenemos
Este documento ha sido generado para facilitar la impresión de los contenidos. Los enlaces a otras páginas no serán funcionales.
 Este documento ha sido generado para facilitar la impresión de los contenidos. Los enlaces a otras páginas no serán funcionales. Introducción Por qué La Geometría? La Geometría tiene como objetivo fundamental
Este documento ha sido generado para facilitar la impresión de los contenidos. Los enlaces a otras páginas no serán funcionales. Introducción Por qué La Geometría? La Geometría tiene como objetivo fundamental
ESTATICA: TIPOS DE MAGNITUDES: CARACTERÍSTICAS DE UN VECTOR. Rama de la física que estudia el equilibrio de los cuerpos.
 ESTATICA: Rama de la física que estudia el equilibrio de los cuerpos. TIPOS DE MAGNITUDES: MAGNITUD ESCALAR: Es una cantidad física que se especifica por un número y una unidad. Ejemplos: La temperatura
ESTATICA: Rama de la física que estudia el equilibrio de los cuerpos. TIPOS DE MAGNITUDES: MAGNITUD ESCALAR: Es una cantidad física que se especifica por un número y una unidad. Ejemplos: La temperatura
Ejercicios de Trigonometría
 Ejercicios de Trigonometría 1) Indica la medida de estos ángulos en radianes: a) 0º b) 45º c) 60º d) 120º Recuerda que 360º son 2π radianes, con lo que para hacer la conversión realizaremos una simple
Ejercicios de Trigonometría 1) Indica la medida de estos ángulos en radianes: a) 0º b) 45º c) 60º d) 120º Recuerda que 360º son 2π radianes, con lo que para hacer la conversión realizaremos una simple
Examen de TEORIA DE MAQUINAS Junio 94 Nombre...
 Examen de TEORIA DE MAQUINAS Junio 94 Nombre... El robot plano de la figura transporta en su extremo una masa puntual de magnitud 5M a velocidad constante horizontal de valor v. Cada brazo del robot tiene
Examen de TEORIA DE MAQUINAS Junio 94 Nombre... El robot plano de la figura transporta en su extremo una masa puntual de magnitud 5M a velocidad constante horizontal de valor v. Cada brazo del robot tiene
CINEMATICA DE MAQUINAS
 CINEMATICA DE MAQUINAS 4.1.- CAMPO DE VELOCIDADES EN EL MOVIMIENTO GENERAL DE UN SISTEMA INDEFORMABLE 4.2.- ACELERACION DE UN PUNTO EN EL MOVIMIENTO GENERAL DE UN SISTEMA INDEFORMABLE 4.3.- EJE INSTANTANEO
CINEMATICA DE MAQUINAS 4.1.- CAMPO DE VELOCIDADES EN EL MOVIMIENTO GENERAL DE UN SISTEMA INDEFORMABLE 4.2.- ACELERACION DE UN PUNTO EN EL MOVIMIENTO GENERAL DE UN SISTEMA INDEFORMABLE 4.3.- EJE INSTANTANEO
Ejercicios resueltos de cinemática
 Ejercicios resueltos de cinemática 1) Un cuerpo situado 50 metros por debajo del origen, se mueve verticalmente con velocidad inicial de 20 m/s, siendo la aceleración de la gravedad g = 9,8 m/s 2. a) Escribe
Ejercicios resueltos de cinemática 1) Un cuerpo situado 50 metros por debajo del origen, se mueve verticalmente con velocidad inicial de 20 m/s, siendo la aceleración de la gravedad g = 9,8 m/s 2. a) Escribe
3. Una pelota se lanza desde el suelo hacia arriba. En un segundo llega hasta una altura de 25 m. Cuál será la máxima altura alcanzada?
 Problemas de Cinemática 1 o Bachillerato Caída libre y tiro horizontal 1. Desde un puente se tira hacia arriba una piedra con una velocidad inicial de 6 m/s. Calcula: a) Hasta qué altura se eleva la piedra;
Problemas de Cinemática 1 o Bachillerato Caída libre y tiro horizontal 1. Desde un puente se tira hacia arriba una piedra con una velocidad inicial de 6 m/s. Calcula: a) Hasta qué altura se eleva la piedra;
a < b y se lee "a es menor que b" (desigualdad estricta) a > b y se lee "a es mayor que b" (desigualdad estricta)
 a > b y se lee a es mayor que b (desigualdad estricta)") Desigualdades Dadas dos rectas que se cortan, llamadas ejes (rectangulares si son perpendiculares, y oblicuos en caso contrario), un punto puede situarse conociendo las distancias del mismo a los ejes,
Desigualdades Dadas dos rectas que se cortan, llamadas ejes (rectangulares si son perpendiculares, y oblicuos en caso contrario), un punto puede situarse conociendo las distancias del mismo a los ejes,
De acuerdo con sus características podemos considerar tres tipos de vectores:
 CÁLCULO VECTORIAL 1. ESCALARES Y VECTORES 1.1.-MAGNITUDES ESCALARES Y VECTORIALES Existen magnitudes físicas cuyas cantidades pueden ser expresadas mediante un número y una unidad. Otras, en cambio, requieren
CÁLCULO VECTORIAL 1. ESCALARES Y VECTORES 1.1.-MAGNITUDES ESCALARES Y VECTORIALES Existen magnitudes físicas cuyas cantidades pueden ser expresadas mediante un número y una unidad. Otras, en cambio, requieren
Hallar gráfica y analíticamente la resultante de los siguientes desplazamientos: hacia el Noroeste), B. (35 m Sur)
, B. (35 m Sur)") VECTORES: OPERACIONES BÁSICAS Hallar gráfica y analíticamente la resultante de los siguientes desplazamientos: hacia el Noroeste), B (0 m Este 30º Norte) y C (35 m Sur) Solución: I.T.I. 94, I.T.T. 05 A
VECTORES: OPERACIONES BÁSICAS Hallar gráfica y analíticamente la resultante de los siguientes desplazamientos: hacia el Noroeste), B (0 m Este 30º Norte) y C (35 m Sur) Solución: I.T.I. 94, I.T.T. 05 A
Teoría Tema 5 Espacios vectoriales
 página 1/14 Teoría Tema 5 Espacios vectoriales Índice de contenido Puntos en 2 y 3 dimensiones...2 Vectores en el plano...5 Suma de vectores...7 Combinación lineal de vectores...8 Sistema generador...10
página 1/14 Teoría Tema 5 Espacios vectoriales Índice de contenido Puntos en 2 y 3 dimensiones...2 Vectores en el plano...5 Suma de vectores...7 Combinación lineal de vectores...8 Sistema generador...10
Tema 1. VECTORES (EN EL PLANO Y EN EL ESPACIO)
") Vectores Tema. VECTORES (EN EL PLANO Y EN EL ESPACIO Definición de espacio vectorial Un conjunto E es un espacio vectorial si en él se definen dos operaciones, una interna (suma y otra externa (producto
Vectores Tema. VECTORES (EN EL PLANO Y EN EL ESPACIO Definición de espacio vectorial Un conjunto E es un espacio vectorial si en él se definen dos operaciones, una interna (suma y otra externa (producto
1 Estática Básica Prohibida su reproducción sin autorización. CONCEPTOS DE FISICA MECANICA. Conceptos de Física Mecánica
 1 CONCEPTOS DE FISICA MECANICA Introducción La parte de la física mecánica se puede dividir en tres grandes ramas de acuerdo a lo que estudia cada una de ellas. Así, podemos clasificarlas según lo siguiente:
1 CONCEPTOS DE FISICA MECANICA Introducción La parte de la física mecánica se puede dividir en tres grandes ramas de acuerdo a lo que estudia cada una de ellas. Así, podemos clasificarlas según lo siguiente:
4.1 EL SISTEMA POLAR 4.2 ECUACIONES EN COORDENADAS POLARES 4.3 GRÁFICAS DE ECUACIONES EN COORDENADAS
 4 4.1 EL SISTEMA POLAR 4. ECUACIONES EN COORDENADAS POLARES 4.3 GRÁFICAS DE ECUACIONES EN COORDENADAS POLARES: RECTAS, CIRCUNFERENCIAS, PARÁBOLAS, ELIPSES, HIPÉRBOLAS, LIMACONS, ROSAS, LEMNISCATAS, ESPIRALES.
4 4.1 EL SISTEMA POLAR 4. ECUACIONES EN COORDENADAS POLARES 4.3 GRÁFICAS DE ECUACIONES EN COORDENADAS POLARES: RECTAS, CIRCUNFERENCIAS, PARÁBOLAS, ELIPSES, HIPÉRBOLAS, LIMACONS, ROSAS, LEMNISCATAS, ESPIRALES.
TIPOS DE RESTRICCIONES
 RESTRICCIONES: Las restricciones son reglas que determinan la posición relativa de las distintas geometrías existentes en el archivo de trabajo. Para poder aplicarlas con rigor es preciso entender el grado
RESTRICCIONES: Las restricciones son reglas que determinan la posición relativa de las distintas geometrías existentes en el archivo de trabajo. Para poder aplicarlas con rigor es preciso entender el grado
Ideas básicas sobre movimiento
 Ideas básicas sobre movimiento Todos conocemos por experiencia qué es el movimiento. En nuestra vida cotidiana, observamos y realizamos infinidad de movimientos. El desplazamiento de los coches, el caminar
Ideas básicas sobre movimiento Todos conocemos por experiencia qué es el movimiento. En nuestra vida cotidiana, observamos y realizamos infinidad de movimientos. El desplazamiento de los coches, el caminar
1. Dominio, simetría, puntos de corte y periodicidad
 Estudio y representación de funciones 1. Dominio, simetría, puntos de corte y periodicidad 1.1. Dominio Al conjunto de valores de x para los cuales está definida la función se le denomina dominio. Se suele
Estudio y representación de funciones 1. Dominio, simetría, puntos de corte y periodicidad 1.1. Dominio Al conjunto de valores de x para los cuales está definida la función se le denomina dominio. Se suele
BASES Y DIMENSIÓN. Propiedades de las bases. Ejemplos de bases.
 BASES Y DIMENSIÓN Definición: Base. Se llama base de un espacio (o subespacio) vectorial a un sistema generador de dicho espacio o subespacio, que sea a la vez linealmente independiente. β Propiedades
BASES Y DIMENSIÓN Definición: Base. Se llama base de un espacio (o subespacio) vectorial a un sistema generador de dicho espacio o subespacio, que sea a la vez linealmente independiente. β Propiedades
Movimientos en el plano
 7 Movimientos en el plano Objetivos En esta quincena aprenderás a: Manejar el concepto de vector como elemento direccional del plano. Reconocer los movimientos principales en el plano: traslaciones, giros
7 Movimientos en el plano Objetivos En esta quincena aprenderás a: Manejar el concepto de vector como elemento direccional del plano. Reconocer los movimientos principales en el plano: traslaciones, giros
El espacio tridimensional. Tema 01: Álgebra lineal y geometría en R 3. Vectores. El producto punto o producto escalar. Teorema
 El espacio tridimensional Tema 01: Álgebra lineal y geometría en R 3 Juan Ignacio Del Valle Gamboa Sede de Guanacaste Universidad de Costa Rica Ciclo I - 2014 Partimos de los conceptos de punto y vector.
El espacio tridimensional Tema 01: Álgebra lineal y geometría en R 3 Juan Ignacio Del Valle Gamboa Sede de Guanacaste Universidad de Costa Rica Ciclo I - 2014 Partimos de los conceptos de punto y vector.
1. Hallar a qué velocidad hay que realizar un tiro parabólico para que llegue a una altura máxima de 100 m si el ángulo de tiro es de 30 o.
 Problemas de Cinemática 1 o Bachillerato Tiro parabólico y movimiento circular 1. Hallar a qué velocidad hay que realizar un tiro parabólico para que llegue a una altura máxima de 100 m si el ángulo de
Problemas de Cinemática 1 o Bachillerato Tiro parabólico y movimiento circular 1. Hallar a qué velocidad hay que realizar un tiro parabólico para que llegue a una altura máxima de 100 m si el ángulo de
VECTORES. Abel Moreno Lorente. February 3, 2015
 VECTORES Abel Moreno Lorente February 3, 015 1 Aspectos grácos. 1.1 Deniciones. Un vector entre dos puntos A y B es el segmento de recta orientado que tiene su origen en A y su extremo en B. A este vector
VECTORES Abel Moreno Lorente February 3, 015 1 Aspectos grácos. 1.1 Deniciones. Un vector entre dos puntos A y B es el segmento de recta orientado que tiene su origen en A y su extremo en B. A este vector
GUIAS ÚNICAS DE LABORATORIO DE FÍSICA I ASPECTOS PRELIMINARES SUMA DE VECTORES
 GUIAS ÚNICAS DE LABORATORIO DE FÍSICA I ASPECTOS PRELIMINARES SUMA DE VECTORES SANTIAGO DE CALI UNIVERSIDAD SANTIAGO DE CALI DEPARTAMENTO DE LABORATORIOS SUMA DE VECTORES OBJETIVOS Usar la mesa de fuerzas
GUIAS ÚNICAS DE LABORATORIO DE FÍSICA I ASPECTOS PRELIMINARES SUMA DE VECTORES SANTIAGO DE CALI UNIVERSIDAD SANTIAGO DE CALI DEPARTAMENTO DE LABORATORIOS SUMA DE VECTORES OBJETIVOS Usar la mesa de fuerzas
(m 2.g - m 2.a - m 1.g - m 1.a ).R = (M.R 2 /2 ). a / R. a = ( m 2 - m 1 ).g / (m 2 + m 1 + M/2) las tensiones son distintas.
.R = (M.R 2 /2 ). a / R. a = ( m 2 - m 1 ).g / (m 2 + m 1 + M/2) las tensiones son distintas.") Dos masas de 1 y 2 kg están unidas por una cuerda inextensible y sin masa que pasa por una polea sin rozamientos. La polea es izada con velocidad constante con una fuerza de 40 Nw. Calcular la tensión
Dos masas de 1 y 2 kg están unidas por una cuerda inextensible y sin masa que pasa por una polea sin rozamientos. La polea es izada con velocidad constante con una fuerza de 40 Nw. Calcular la tensión
RECTAS Y PLANOS EN EL ESPACIO
 UNIDAD 6 RECTA Y PLANO EN EL EPACIO Página 1 1. Puntos alineados en el plano Comprueba que los puntos A (, ), B (8, ) y C (1, ) no están alineados. A (, ) B (8, ) C (1, ) AB = (, 1); BC = (, ) No tienen
UNIDAD 6 RECTA Y PLANO EN EL EPACIO Página 1 1. Puntos alineados en el plano Comprueba que los puntos A (, ), B (8, ) y C (1, ) no están alineados. A (, ) B (8, ) C (1, ) AB = (, 1); BC = (, ) No tienen
Sistemas de vectores deslizantes
 Capítulo 1 Sistemas de vectores deslizantes 1.1. Vectores. Álgebra vectorial. En Física, se denomina magnitud fsica (o simplemente, magnitud) a todo aquello que es susceptible de ser cuantificado o medido
Capítulo 1 Sistemas de vectores deslizantes 1.1. Vectores. Álgebra vectorial. En Física, se denomina magnitud fsica (o simplemente, magnitud) a todo aquello que es susceptible de ser cuantificado o medido
VECTORES. Por ejemplo: la velocidad de un automóvil, o la fuerza ejercida por una persona sobre un objeto.
 Un vector v es un segmento orientado. VECTORES Se representa gráficamente por medio de una flecha, por ejemplo: Todos los vectores poseen las siguientes características: Punto de aplicación: es el lugar
Un vector v es un segmento orientado. VECTORES Se representa gráficamente por medio de una flecha, por ejemplo: Todos los vectores poseen las siguientes características: Punto de aplicación: es el lugar
PROGRAMACIÓN LINEAL. 8.1. Introducción. 8.2. Inecuaciones lineales con 2 variables
 Capítulo 8 PROGRAMACIÓN LINEAL 8.1. Introducción La programación lineal es una técnica matemática relativamente reciente (siglo XX), que consiste en una serie de métodos y procedimientos que permiten resolver
Capítulo 8 PROGRAMACIÓN LINEAL 8.1. Introducción La programación lineal es una técnica matemática relativamente reciente (siglo XX), que consiste en una serie de métodos y procedimientos que permiten resolver
Unidad V: Integración
 Unidad V: Integración 5.1 Introducción La integración es un concepto fundamental de las matemáticas avanzadas, especialmente en los campos del cálculo y del análisis matemático. Básicamente, una integral
Unidad V: Integración 5.1 Introducción La integración es un concepto fundamental de las matemáticas avanzadas, especialmente en los campos del cálculo y del análisis matemático. Básicamente, una integral
1. ESCALARES Y VECTORES
 1. ESCLRES Y VECTORES lgunas magnitudes físicas se especifican por completo mediante un solo número acompañado de su unidad, por ejemplo, el tiempo, la temperatura, la masa, la densidad, etc. Estas magnitudes
1. ESCLRES Y VECTORES lgunas magnitudes físicas se especifican por completo mediante un solo número acompañado de su unidad, por ejemplo, el tiempo, la temperatura, la masa, la densidad, etc. Estas magnitudes
Tema 2. Espacios Vectoriales. 2.1. Introducción
 Tema 2 Espacios Vectoriales 2.1. Introducción Estamos habituados en diferentes cursos a trabajar con el concepto de vector. Concretamente sabemos que un vector es un segmento orientado caracterizado por
Tema 2 Espacios Vectoriales 2.1. Introducción Estamos habituados en diferentes cursos a trabajar con el concepto de vector. Concretamente sabemos que un vector es un segmento orientado caracterizado por
Espacio afín. Transformaciones afines y movimientos
 Capítulo Espacio afín. Transformaciones afines y movimientos. Espacio afín y espacio afín métrico Definición. El espacio afín (tridimensional) está constituido por los siguientes elementos. El espacio
Capítulo Espacio afín. Transformaciones afines y movimientos. Espacio afín y espacio afín métrico Definición. El espacio afín (tridimensional) está constituido por los siguientes elementos. El espacio
MECANISMOS. Veamos los distintos tipos de mecanismos que vamos a estudiar uno a uno.
 MECANISMOS En tecnología, cuando se diseña una máquina, lo más normal es que esté movida por un motor, que tiene un movimiento circular, pero a veces no es ese el tipo de movimiento que necesitamos. En
MECANISMOS En tecnología, cuando se diseña una máquina, lo más normal es que esté movida por un motor, que tiene un movimiento circular, pero a veces no es ese el tipo de movimiento que necesitamos. En
Universidad de la Frontera. Geometría Anaĺıtica: Departamento de Matemática y Estadística. Cĺınica de Matemática. J. Labrin - G.
 Universidad de la Frontera Departamento de Matemática y Estadística Cĺınica de Matemática 1 Geometría Anaĺıtica: J. Labrin - G.Riquelme 1. Los puntos extremos de un segmento son P 1 (2,4) y P 2 (8, 4).
Universidad de la Frontera Departamento de Matemática y Estadística Cĺınica de Matemática 1 Geometría Anaĺıtica: J. Labrin - G.Riquelme 1. Los puntos extremos de un segmento son P 1 (2,4) y P 2 (8, 4).
MEDICION DE LA DISTANCIA ANGULAR EN ESTRELLAS DOBLES VISUALES UN PROCEDIMIENTO TRIGONOMÉTRICO
 MEDICION DE LA DISTANCIA ANGULAR EN ESTRELLAS DOBLES VISUALES UN SOBRE LA MEDIDA DEL ARCO DE SEPARACIÓN DE DOS ESTRELLAS BINARIAS Cuando se trata de medir el arco comprendido entre la posición en la bóveda
MEDICION DE LA DISTANCIA ANGULAR EN ESTRELLAS DOBLES VISUALES UN SOBRE LA MEDIDA DEL ARCO DE SEPARACIÓN DE DOS ESTRELLAS BINARIAS Cuando se trata de medir el arco comprendido entre la posición en la bóveda
3º Tema.- Síntesis de mecanismos.
 Universidad de Huelva ESCUELA POLITECNICA SUPERIOR Departamento de Ingeniería Minera, Mecánica y Energética Asignatura: Ingeniería de Máquinas [570004027] 5º curso de Ingenieros Industriales 3º Tema.-
Universidad de Huelva ESCUELA POLITECNICA SUPERIOR Departamento de Ingeniería Minera, Mecánica y Energética Asignatura: Ingeniería de Máquinas [570004027] 5º curso de Ingenieros Industriales 3º Tema.-
2. Vector tangente y gráficas en coordenadas polares.
 GRADO DE INGENIERÍA AEROESPACIAL CURSO 0 Vector tangente y gráficas en coordenadas polares De la misma forma que la ecuación cartesiana y = yx ( ) define una curva en el plano, aquella formada por los
GRADO DE INGENIERÍA AEROESPACIAL CURSO 0 Vector tangente y gráficas en coordenadas polares De la misma forma que la ecuación cartesiana y = yx ( ) define una curva en el plano, aquella formada por los
TEMA 7 GEOMETRÍA ANALÍTICA
 Nueva del Carmen, 35. 470 Valladolid. Tel: 983 9 63 9 Fax: 983 89 96 TEMA 7 GEOMETRÍA ANALÍTICA. Objetivos / Criterios de evaluación O.7. Concepto y propiedades de los vectores O.7. Operaciones con vectores:
Nueva del Carmen, 35. 470 Valladolid. Tel: 983 9 63 9 Fax: 983 89 96 TEMA 7 GEOMETRÍA ANALÍTICA. Objetivos / Criterios de evaluación O.7. Concepto y propiedades de los vectores O.7. Operaciones con vectores:
Te damos los elementos básicos de los vectores para que puedas entender las operaciones básicas.
 4 año secundario Vectores, refrescando conceptos adquiridos Te damos los elementos básicos de los vectores para que puedas entender las operaciones básicas. El término vector puede referirse al: concepto
4 año secundario Vectores, refrescando conceptos adquiridos Te damos los elementos básicos de los vectores para que puedas entender las operaciones básicas. El término vector puede referirse al: concepto
ESTÁTICA 2. VECTORES. Figura tomada de http://www.juntadeandalucia.es/averroes/~04001205/fisiqui/imagenes/vectores/473396841_e1de1dd225_o.
 ESTÁTICA Sesión 2 2 VECTORES 2.1. Escalares y vectores 2.2. Cómo operar con vectores 2.2.1. Suma vectorial 2.2.2. Producto de un escalar y un vector 2.2.3. Resta vectorial 2.2.4. Vectores unitarios 2.2.5.
ESTÁTICA Sesión 2 2 VECTORES 2.1. Escalares y vectores 2.2. Cómo operar con vectores 2.2.1. Suma vectorial 2.2.2. Producto de un escalar y un vector 2.2.3. Resta vectorial 2.2.4. Vectores unitarios 2.2.5.
EXAMEN FÍSICA 2º BACHILLERATO TEMA 1: CAMPO GRAVITATORIO
 INSTRUCCIONES GENERALES Y VALORACIÓN La prueba consiste de dos opciones, A y B, y el alumno deberá optar por una de las opciones y resolver las tres cuestiones y los dos problemas planteados en ella, sin
INSTRUCCIONES GENERALES Y VALORACIÓN La prueba consiste de dos opciones, A y B, y el alumno deberá optar por una de las opciones y resolver las tres cuestiones y los dos problemas planteados en ella, sin
PROBLEMAS MÉTRICOS. Página 183 REFLEXIONA Y RESUELVE. Diagonal de un ortoedro. Distancia entre dos puntos. Distancia de un punto a una recta
 PROBLEMAS MÉTRICOS Página 3 REFLEXIONA Y RESUELVE Diagonal de un ortoedro Halla la diagonal de los ortoedros cuyas dimensiones son las siguientes: I) a =, b =, c = II) a = 4, b =, c = 3 III) a =, b = 4,
PROBLEMAS MÉTRICOS Página 3 REFLEXIONA Y RESUELVE Diagonal de un ortoedro Halla la diagonal de los ortoedros cuyas dimensiones son las siguientes: I) a =, b =, c = II) a = 4, b =, c = 3 III) a =, b = 4,
Problemas de Física 1 o Bachillerato
 Problemas de Física o Bachillerato Principio de conservación de la energía mecánica. Desde una altura h dejamos caer un cuerpo. Hallar en qué punto de su recorrido se cumple E c = 4 E p 2. Desde la parte
Problemas de Física o Bachillerato Principio de conservación de la energía mecánica. Desde una altura h dejamos caer un cuerpo. Hallar en qué punto de su recorrido se cumple E c = 4 E p 2. Desde la parte
Cálculo de las Acciones Motoras en Mecánica Analítica
 Cálculo de las Acciones Motoras en Mecánica Analítica 1. Planteamiento general El diseño típico de la motorización de un sistema mecánico S es el que se muestra en la figura 1. Su posición viene definida
Cálculo de las Acciones Motoras en Mecánica Analítica 1. Planteamiento general El diseño típico de la motorización de un sistema mecánico S es el que se muestra en la figura 1. Su posición viene definida
, y su resultado es igual a la suma de los productos de las coordenadas correspondientes. Si u = (u 1, u 2 ) y v = (v 1, v 2 ), = u1 v 1 + u 2 v 2
 y v = (v 1, v 2 ), = u1 v 1 + u 2 v 2") Los vectores Los vectores Distancia entre dos puntos del plano Dados dos puntos coordenados del plano, P 1 = (x 1, y 1 ) y P = (x, y ), la distancia entre estos dos puntos, d(p 1,P ), se calcula de la
Los vectores Los vectores Distancia entre dos puntos del plano Dados dos puntos coordenados del plano, P 1 = (x 1, y 1 ) y P = (x, y ), la distancia entre estos dos puntos, d(p 1,P ), se calcula de la
Seminario Universitario Material para estudiantes. Física. Unidad 2. Vectores en el plano. Lic. Fabiana Prodanoff
 Seminario Universitario Material para estudiantes Física Unidad 2. Vectores en el plano Lic. Fabiana Prodanoff CONTENIDOS Vectores en el plano. Operaciones con vectores. Suma y producto por un número escalar.
Seminario Universitario Material para estudiantes Física Unidad 2. Vectores en el plano Lic. Fabiana Prodanoff CONTENIDOS Vectores en el plano. Operaciones con vectores. Suma y producto por un número escalar.
Instituto de Física, Facultad de Ciencias, Universidad de la República Mecánica clásica 2015. Mecánica clásica
 Mecánica clásica Práctico I Cinemática de la Partícula y Movimiento Relativo Parte : Ejercicios de Cinemática de la Partícula Ejercicio 1 H C B v B Una cuerda flexible, inextensible y sin peso 1 de longitud
Mecánica clásica Práctico I Cinemática de la Partícula y Movimiento Relativo Parte : Ejercicios de Cinemática de la Partícula Ejercicio 1 H C B v B Una cuerda flexible, inextensible y sin peso 1 de longitud
IES Menéndez Tolosa. La Línea de la Concepción. 1 Es posible que un cuerpo se mueva sin que exista fuerza alguna sobre él?
 IES Menéndez Tolosa. La Línea de la Concepción 1 Es posible que un cuerpo se mueva sin que exista fuerza alguna sobre él? Si. Una consecuencia del principio de la inercia es que puede haber movimiento
IES Menéndez Tolosa. La Línea de la Concepción 1 Es posible que un cuerpo se mueva sin que exista fuerza alguna sobre él? Si. Una consecuencia del principio de la inercia es que puede haber movimiento
Problemas resueltos. Consideramos despreciable la caída de tensión en las escobillas, por lo que podremos escribir:
 Problemas resueltos Problema 1. Un motor de c.c (excitado según el circuito del dibujo) tiene una tensión en bornes de 230 v., si la fuerza contraelectromotriz generada en el inducido es de 224 v. y absorbe
Problemas resueltos Problema 1. Un motor de c.c (excitado según el circuito del dibujo) tiene una tensión en bornes de 230 v., si la fuerza contraelectromotriz generada en el inducido es de 224 v. y absorbe
Aproximación local. Plano tangente. Derivadas parciales.
 Univ. de Alcalá de Henares Ingeniería de Telecomunicación Cálculo. Segundo parcial. Curso 004-005 Aproximación local. Plano tangente. Derivadas parciales. 1. Plano tangente 1.1. El problema de la aproximación
Univ. de Alcalá de Henares Ingeniería de Telecomunicación Cálculo. Segundo parcial. Curso 004-005 Aproximación local. Plano tangente. Derivadas parciales. 1. Plano tangente 1.1. El problema de la aproximación
Capítulo 1. Vectores en el plano. 1.1. Introducción
 Índice general 1. Vectores en el plano 2 1.1. Introducción.................................... 2 1.2. Qué es un vector?................................ 3 1.2.1. Dirección y sentido............................
Índice general 1. Vectores en el plano 2 1.1. Introducción.................................... 2 1.2. Qué es un vector?................................ 3 1.2.1. Dirección y sentido............................
Movimiento en dos y tres dimensiones. Teoría. Autor:
 Movimiento en dos y tres dimensiones Teoría Autor: YeissonHerney Herrera Contenido 1. Introducción 1.1. actividad palabras claves unid 2. Vector posición 2.1. Explicación vector posición 2.2. Animación
Movimiento en dos y tres dimensiones Teoría Autor: YeissonHerney Herrera Contenido 1. Introducción 1.1. actividad palabras claves unid 2. Vector posición 2.1. Explicación vector posición 2.2. Animación
Las ecuaciones que nos dan la posición (x) de la partícula en función del tiempo son las siguientes: ( )
 de la partícula en función del tiempo son las siguientes: ( )") DESARROLLO DE LA PARTE TEÓRICA DE LA UNIDAD DIDÁCTICA. 1. Cinemática del movimiento armónico simple. Dinámica del movimiento armónico simple 3. Energía del movimiento armónico simple 4. Aplicaciones: resorte
DESARROLLO DE LA PARTE TEÓRICA DE LA UNIDAD DIDÁCTICA. 1. Cinemática del movimiento armónico simple. Dinámica del movimiento armónico simple 3. Energía del movimiento armónico simple 4. Aplicaciones: resorte
3. Operaciones con funciones.
 GRADO DE INGENIERÍA AEROESPACIAL. CURSO 00. Lección. Funciones derivada. 3. Operaciones con funciones. En esta sección veremos cómo podemos combinar funciones para construir otras nuevas. Especialmente
GRADO DE INGENIERÍA AEROESPACIAL. CURSO 00. Lección. Funciones derivada. 3. Operaciones con funciones. En esta sección veremos cómo podemos combinar funciones para construir otras nuevas. Especialmente
GEOMETRÍA ANALÍTICA 2º Curso de Bachillerato 22 de mayo de 2008
 1. Sean los puntos A (1, 0,-1) y B (,-1, 3). Calcular la distancia del origen de coordenadas a la recta que pasa por A y B. Calculemos la recta que pasa por A y B. El vector AB es (1,-1,4) y por tanto
1. Sean los puntos A (1, 0,-1) y B (,-1, 3). Calcular la distancia del origen de coordenadas a la recta que pasa por A y B. Calculemos la recta que pasa por A y B. El vector AB es (1,-1,4) y por tanto
VECTORES EN EL PLANO
 VECTORES EN EL PLANO VECTOR: vectores libres Segmento orientado, con un origen y extremo. Módulo: es la longitud del segmento orientado, es un número positivo y su símbolo es a Dirección: es la recta que
VECTORES EN EL PLANO VECTOR: vectores libres Segmento orientado, con un origen y extremo. Módulo: es la longitud del segmento orientado, es un número positivo y su símbolo es a Dirección: es la recta que
Parcial I Cálculo Vectorial
 Parcial I Cálculo Vectorial Febrero 8 de 1 ( Puntos) I. Responda falso o verdadero justificando matematicamente su respuesta. (i) La gráfica de la ecuación cos ϕ = 1, en coordenadas esféricas en R3, es
Parcial I Cálculo Vectorial Febrero 8 de 1 ( Puntos) I. Responda falso o verdadero justificando matematicamente su respuesta. (i) La gráfica de la ecuación cos ϕ = 1, en coordenadas esféricas en R3, es
Cajón de Ciencias. Ejercicios resueltos de Movimiento rectilíneo uniforme
 Ejercicios resueltos de Movimiento rectilíneo uniforme 1) Pasar de unidades las siguientes velocidades: a) de 36 km/h a m/s b) de 10 m/s a km/h c) de 30 km/min a cm/s d) de 50 m/min a km/h 2) Un móvil
Ejercicios resueltos de Movimiento rectilíneo uniforme 1) Pasar de unidades las siguientes velocidades: a) de 36 km/h a m/s b) de 10 m/s a km/h c) de 30 km/min a cm/s d) de 50 m/min a km/h 2) Un móvil
Ejercicios resueltos de vectores
 Ejercicios resueltos de vectores 1) Sean a(2,-1,3), b(3,0,-2) y c(-2,-2,1), realiza las siguientes operaciones con vectores: a) 3a + b - c b) a -2b c) a c 2) Utilizando los vectores del ejercicio 1, comprueba
Ejercicios resueltos de vectores 1) Sean a(2,-1,3), b(3,0,-2) y c(-2,-2,1), realiza las siguientes operaciones con vectores: a) 3a + b - c b) a -2b c) a c 2) Utilizando los vectores del ejercicio 1, comprueba
M a t e m á t i c a s I I 1
 Matemáticas II Matemáticas II ANDALUCÍA CNVCATRIA JUNI 009 SLUCIÓN DE LA PRUEBA DE ACCES AUTR: José Luis Pérez Sanz pción A Ejercicio En este límite nos encontramos ante la indeterminación. Agrupemos la
Matemáticas II Matemáticas II ANDALUCÍA CNVCATRIA JUNI 009 SLUCIÓN DE LA PRUEBA DE ACCES AUTR: José Luis Pérez Sanz pción A Ejercicio En este límite nos encontramos ante la indeterminación. Agrupemos la
MECANICA CLASICA Segundo cuatrimestre de 2007. Cinemática y dinámica del cuerpo rígido, ángulos de Euler, Ecuaciones de Euler.
 MECANICA CLASICA Segundo cuatrimestre de 2007. Cinemática y dinámica del cuerpo rígido, ángulos de Euler, Ecuaciones de Euler. Problema 1: Analizar los siguientes puntos. a) Mostrar que la velocidad angular
MECANICA CLASICA Segundo cuatrimestre de 2007. Cinemática y dinámica del cuerpo rígido, ángulos de Euler, Ecuaciones de Euler. Problema 1: Analizar los siguientes puntos. a) Mostrar que la velocidad angular
Estos elementos mecánicos suelen ir montados sobre los ejes de transmisión, que son piezas cilíndricas sobre las cuales se colocan los mecanismos.
 MECANISMOS A. Introducción. Un mecanismo es un dispositivo que transforma el movimiento producido por un elemento motriz (fuerza de entrada) en un movimiento deseado de salida (fuerza de salida) llamado
MECANISMOS A. Introducción. Un mecanismo es un dispositivo que transforma el movimiento producido por un elemento motriz (fuerza de entrada) en un movimiento deseado de salida (fuerza de salida) llamado
Geometría Tridimensional
 Capítulo 4 Geometría Tridimensional En dos dimensiones trabajamos en el plano mientras que en tres dimensiones trabajaremos en el espacio, también provisto de un sistema de coordenadas. En el espacio,
Capítulo 4 Geometría Tridimensional En dos dimensiones trabajamos en el plano mientras que en tres dimensiones trabajaremos en el espacio, también provisto de un sistema de coordenadas. En el espacio,
Funciones, x, y, gráficos
 Funciones, x, y, gráficos Vamos a ver los siguientes temas: funciones, definición, dominio, codominio, imágenes, gráficos, y algo más. Recordemos el concepto de función: Una función es una relación entre
Funciones, x, y, gráficos Vamos a ver los siguientes temas: funciones, definición, dominio, codominio, imágenes, gráficos, y algo más. Recordemos el concepto de función: Una función es una relación entre
Capítulo II. Movimiento plano. Capítulo II Movimiento plano
 inemática y Dinámica de Máquinas. II. spectos generales del movimiento plano apítulo II Movimiento plano inemática y Dinámica de Máquinas. II. spectos generales del movimiento plano apítulo II Movimiento
inemática y Dinámica de Máquinas. II. spectos generales del movimiento plano apítulo II Movimiento plano inemática y Dinámica de Máquinas. II. spectos generales del movimiento plano apítulo II Movimiento
Matrices equivalentes. El método de Gauss
 Matrices equivalentes. El método de Gauss Dada una matriz A cualquiera decimos que B es equivalente a A si podemos transformar A en B mediante una combinación de las siguientes operaciones: Multiplicar
Matrices equivalentes. El método de Gauss Dada una matriz A cualquiera decimos que B es equivalente a A si podemos transformar A en B mediante una combinación de las siguientes operaciones: Multiplicar
ECUACION DE DEMANDA. El siguiente ejemplo ilustra como se puede estimar la ecuación de demanda cuando se supone que es lineal.
 ECUACION DE DEMANDA La ecuación de demanda es una ecuación que expresa la relación que existe entre q y p, donde q es la cantidad de artículos que los consumidores están dispuestos a comprar a un precio
ECUACION DE DEMANDA La ecuación de demanda es una ecuación que expresa la relación que existe entre q y p, donde q es la cantidad de artículos que los consumidores están dispuestos a comprar a un precio
Aplicaciones de vectores
 Aplicaciones de vectores Coordenadas del punto medio de un segmento Las coordenadas del punto medio de un segmento son la semisuma de las coordenadas de los extremos. Ejemplo: Hallar las coordenadas del
Aplicaciones de vectores Coordenadas del punto medio de un segmento Las coordenadas del punto medio de un segmento son la semisuma de las coordenadas de los extremos. Ejemplo: Hallar las coordenadas del
Nivelación de Matemática MTHA UNLP 1. Vectores
 Nivelación de Matemática MTHA UNLP 1 1. Definiciones básicas Vectores 1.1. Magnitudes escalares y vectoriales. Hay magnitudes que quedan determinadas dando un solo número real: su medida. Por ejemplo:
Nivelación de Matemática MTHA UNLP 1 1. Definiciones básicas Vectores 1.1. Magnitudes escalares y vectoriales. Hay magnitudes que quedan determinadas dando un solo número real: su medida. Por ejemplo:
MÉTODOS DE ELIMINACIÓN Son tres los métodos de eliminación más utilizados: Método de igualación, de sustitución y de suma o resta.
 ECUACIONES SIMULTÁNEAS DE PRIMER GRADO CON DOS INCÓGNITAS. Dos o más ecuaciones con dos incógnitas son simultáneas cuando satisfacen iguales valores de las incógnitas. Para resolver ecuaciones de esta
ECUACIONES SIMULTÁNEAS DE PRIMER GRADO CON DOS INCÓGNITAS. Dos o más ecuaciones con dos incógnitas son simultáneas cuando satisfacen iguales valores de las incógnitas. Para resolver ecuaciones de esta
1º Tema.- Conceptos y definiciones en cinemática.
 Universidad de Huelva ESCUELA POLITECNICA SUPERIOR Departamento de Ingeniería Minera, Mecánica y Energética Asignatura: Ingeniería de Máquinas [570004027] 5º curso de Ingenieros Industriales 1º Tema.-
Universidad de Huelva ESCUELA POLITECNICA SUPERIOR Departamento de Ingeniería Minera, Mecánica y Energética Asignatura: Ingeniería de Máquinas [570004027] 5º curso de Ingenieros Industriales 1º Tema.-
Segundo de Bachillerato Geometría en el espacio
 Segundo de Bachillerato Geometría en el espacio Jesús García de Jalón de la Fuente IES Ramiro de Maeztu Madrid 204-205. Coordenadas de un vector En el conjunto de los vectores libres del espacio el concepto
Segundo de Bachillerato Geometría en el espacio Jesús García de Jalón de la Fuente IES Ramiro de Maeztu Madrid 204-205. Coordenadas de un vector En el conjunto de los vectores libres del espacio el concepto
TEMA 5 RESOLUCIÓN DE CIRCUITOS
 TEMA 5 RESOLUCIÓN DE CIRCUITOS RESOLUCIÓN DE CIRCUITOS POR KIRCHHOFF Para poder resolver circuitos por Kirchhoff debemos determinar primeros los conceptos de malla, rama y nudo. Concepto de malla: Se llama
TEMA 5 RESOLUCIÓN DE CIRCUITOS RESOLUCIÓN DE CIRCUITOS POR KIRCHHOFF Para poder resolver circuitos por Kirchhoff debemos determinar primeros los conceptos de malla, rama y nudo. Concepto de malla: Se llama
Nuestros proyectos tecnológicos suelen tener una parte física, un cuerpo que necesitamos preparar, diseñar, montar, construir, etc.
 Nuestros proyectos tecnológicos suelen tener una parte física, un cuerpo que necesitamos preparar, diseñar, montar, construir, etc. Para poder realizar la parte física necesitamos plasmar nuestras ideas
Nuestros proyectos tecnológicos suelen tener una parte física, un cuerpo que necesitamos preparar, diseñar, montar, construir, etc. Para poder realizar la parte física necesitamos plasmar nuestras ideas
A RG. Giro de un punto A respecto del eje vertical, e. Giro de un punto A respecto del eje de punta, e.
 Giro de un punto A respecto del eje vertical, e. A''' A''' 2 e A'' 60 El giro es otro de los procedimietos utilizados en diédrico para resolver construcciones. Aquí vamos a ver solo uno de sus aspectos:
Giro de un punto A respecto del eje vertical, e. A''' A''' 2 e A'' 60 El giro es otro de los procedimietos utilizados en diédrico para resolver construcciones. Aquí vamos a ver solo uno de sus aspectos:
VECTORES. Módulo, dirección y sentido de un vector fijo En un vector fijo se llama módulo del mismo a la longitud del segmento que lo define.
 VECTORES El estudio de los vectores es uno de tantos conocimientos de las matemáticas que provienen de la física. En esta ciencia se distingue entre magnitudes escalares y magnitudes vectoriales. Se llaman
VECTORES El estudio de los vectores es uno de tantos conocimientos de las matemáticas que provienen de la física. En esta ciencia se distingue entre magnitudes escalares y magnitudes vectoriales. Se llaman
MATEMÁTICAS para estudiantes de primer curso de facultades y escuelas técnicas
 Universidad de ádiz Departamento de Matemáticas MATEMÁTIAS para estudiantes de primer curso de facultades y escuelas técnicas Tema 5 La circunferencia Elaborado por la Profesora Doctora María Teresa González
Universidad de ádiz Departamento de Matemáticas MATEMÁTIAS para estudiantes de primer curso de facultades y escuelas técnicas Tema 5 La circunferencia Elaborado por la Profesora Doctora María Teresa González
Electrostática: ejercicios resueltos
 Electrostática: ejercicios resueltos 1) Dos cargas de 4 y 9 microculombios se hallan situadas en los puntos (2,0) y (4,0) del eje 0X. Calcula el campo y el potencial eléctrico en el punto medio. 2) Dos
Electrostática: ejercicios resueltos 1) Dos cargas de 4 y 9 microculombios se hallan situadas en los puntos (2,0) y (4,0) del eje 0X. Calcula el campo y el potencial eléctrico en el punto medio. 2) Dos
DIBUJO TÉCNICO. UNIDAD DIDÁCTICA 9: Geometría 2D (V)
") UNIDAD DIDÁCTICA 9: Geometría 2D (V) ÍNDICE Página: 1 CURVAS CÓNICAS. ELEMENTOS CARACTERÍSTICOS.. 2 2 TRAZADO MEDIANTE RADIOS VECTORES 4 3 RECTAS TANGENTES A CÓNICAS 5 3.1 CIRCUNFERENCIAS FOCALES 6 3.2
UNIDAD DIDÁCTICA 9: Geometría 2D (V) ÍNDICE Página: 1 CURVAS CÓNICAS. ELEMENTOS CARACTERÍSTICOS.. 2 2 TRAZADO MEDIANTE RADIOS VECTORES 4 3 RECTAS TANGENTES A CÓNICAS 5 3.1 CIRCUNFERENCIAS FOCALES 6 3.2
Una vez descrita la constitución general de un robot, podemos empezar con la
 CAPÍTULO 2 Construcción y Mecanismo de Operación del Brazo Robótico Una vez descrita la constitución general de un robot, podemos empezar con la descripción de nuestro robot, cómo fue construido y cómo
CAPÍTULO 2 Construcción y Mecanismo de Operación del Brazo Robótico Una vez descrita la constitución general de un robot, podemos empezar con la descripción de nuestro robot, cómo fue construido y cómo