Lógica Difusa. Parte II. Facultad de Ciencias Exactas y Tecnología Universidad Nacional de Tucumán Mg. Ing. Gustavo E. Juárez
|
|
|
- Alberto Moya Caballero
- hace 6 años
- Vistas:
Transcripción


1 Lógica Difusa Parte II Facultad de Ciencias Exactas y Tecnología Universidad Nacional de Tucumán Mg. Ing. Gustavo E. Juárez
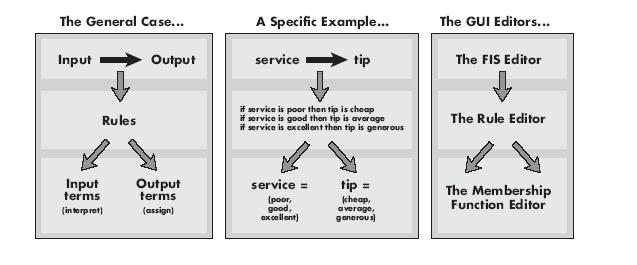
2 O FUZZY LOGIC Lógica Fuzzy. De/iniciones. Datos reales (crisp) versus datos difusos (fuzzy). Conceptos de Función de Pertenencia y Variables Lingüísticas. Normas y Co-Normas. Modi/icadores. Implicación. Combinación de evidencias Controladores Fuzzy. Estructura fundamental. Características de la Fuzzi/icación, Defuzzy/icación y Cambios de Escala. Modelos de Mamdani y Sugeno (TSK). Controladores Fuzzy Jerárquicos. Uso de Esquemas Híbridos. Utilización de Matlab y su Toolkit sobre Lógica Fuzzy (FIS).
3 Definiciones Función de Pertenencia o Membership Function (MF) Es una curva que determina el grado de pertenencia de los elementos de un conjunto. Se denota generalmente por m y puede adoptar valores entre 0 y 1. Universo de Discurso Conjunto de valores que puede tomar una variable.
4 Función de Pertenencia
5 Función de Pertenencia - Componentes Hay muchos tipos de funciones de pertenencia. Algunos de los más comunes son:
6 Operaciones Lógicas
7 Operaciones Lógicas Aplicaciones en Lógica Difusa
8 Reglas Difusas X à entrada Yà Salida A Conjunto difuso de pertenencia de la entrada B Conjunto difuso de salida :
9 Proceso
10 Sistema de Reglas
11 Fuzzificacion
12 Implicación

13 Agregación de las Salidas
14 Defuzzificacion
15 Integración de las Fases del Proceso

16 Matlab & Fuzzy Toolbox
17 Proceso




18 Caso de Estudio: Distancia de frenado entre Vehículos



19 Caso de Estudio: Distancia de frenado entre Vehículos


20 Caso de Estudio: Distancia de frenado entre Vehículos
21 Caso de Estudio: Algoritmo para el Calculo de Frenada
22 Caso de Estudio: Algoritmo para el Calculo de Frenada
23 Caso de Estudio: Descripción del Sistema a Controlar. Definición de Variables Al manejar en una carretera, procuramos mantener una distancia segura con el vehículo que va delante de nosotros. Para esto se va a diseñar un controlador lógico fuzzy Distancia Velocidad Freno
24 Caso de Estudio: Definición de Funciones de Membresía Conjuntos difusos caracterizando la entrada (Distancia) Variable fuzzy Distancia Rango:0 a 30M.f. utilizada Rango de las entradas Crisp Corta Triangular MF (-15,0,15), Media Triangular MF (0, 15, 30), Alta Triangular MF (15, 30, 45) Conjuntos difusos caracterizando la entrada (Velocidad) Variable fuzzy Velocidad Rango:0 a 40M.f. utilizada Rango de las entradas Crisp Lenta Triangular MF (-20,0,20), Media Triangular MF (0, 20, 40), Alta Triangular MF (20, 40,60) Conjuntos difusos caracterizando la salida (Freno) Variable fuzzy Freno Rango: 0 a 100MF utilizada Rango de las entradas Crisp Cero Triangular MF (-50, 0, 50), Medio Triangular MF (0, 50, 100), Duro Triangular MF (50, 100, 150)


25 Caso de Estudio: Construcción de los Termsets Introducción de las variables y sus funciones miembro con sus respectivos parámetros.
26 Caso de Estudio: Formulación de la Base de Reglas Formulación de la base de reglas: Si la distancia es corta y la velocidad es alta entonces es freno es duro. Si la distancia es corta y la velocidad es media entonces es freno es medio. Si la distancia es corta y la velocidad es lenta entonces es freno es cero. Si la distancia es media y la velocidad es alta entonces es freno es medio. Si la distancia es media y la velocidad es media entonces es freno es cero. Si la distancia es media y la velocidad es lenta entonces es freno es cero. Si la distancia es alta y la velocidad es alta entonces es freno es medio. Si la distancia es alta y la velocidad es alta entonces es freno es cero. Si la distancia es alta y la velocidad es alta entonces es freno es cero. El bloque presentado a continuación describe el sistema de control difuso, con la planta (carro) y el controlador difuso
27 Caso de Estudio: Diagrama de Bloques del Sistema de Control Difuso

28 Caso de Estudio: Sistema de Control Difuso de Frenado- Distancia según la velocidad El valor de la distancia calculada de 9.4 m, con una velocidad de m/s y con un frenado de 18.9.
29 Análisis de los Resultados Al comparar con diversos valores de distancia dentro del rango de 0 a 30, el controlador difuso mostraba 0.6 menos del valor deseado. Si se considera una distancia deseada igual a 10, muestra en su base de reglas la distancia calculada de 9.4, con valor deseado de 20, y con un valor de salida igual a 19.4.
30 REFERENCIAS Apuntes de Clases Teóricas y Practicas


31
La lógica difusa en ingeniería: Principios, aplicaciones y futuro
 Artículo Invitado Ciencia y Tecnología, 24(2): 87-107, 2006 ISSN: 0378-0524 La lógica difusa en ingeniería: Principios, aplicaciones y futuro D. Guzmán, V. M. Castaño 1 * 1. Centro de Física Aplicada y
Artículo Invitado Ciencia y Tecnología, 24(2): 87-107, 2006 ISSN: 0378-0524 La lógica difusa en ingeniería: Principios, aplicaciones y futuro D. Guzmán, V. M. Castaño 1 * 1. Centro de Física Aplicada y
PROGRAMA INSTRUCCIONAL LABORATORIO DE PROCESOS
 UNIVERSIDAD FERMIN TORO VICE-RECTORADO ACADEMICO FACULTAD DE INGENIERIA ESCUELA DE MANTENIMIENTO MECANICO PROGRAMA AL LABORATORIO DE PROCESOS CÓDIGO ASIGNADO SEMESTRE U.C DENSIDAD HORARIA H.T H.P/H.L H.A
UNIVERSIDAD FERMIN TORO VICE-RECTORADO ACADEMICO FACULTAD DE INGENIERIA ESCUELA DE MANTENIMIENTO MECANICO PROGRAMA AL LABORATORIO DE PROCESOS CÓDIGO ASIGNADO SEMESTRE U.C DENSIDAD HORARIA H.T H.P/H.L H.A
Diseño de un Sistema de Control Lógico Difuso Basado en Microcontroladores de 8 bits
 Diseño de un Sistema de Control Lógico Difuso Basado en Microcontroladores de 8 bits Salvador Ramírez Zavala, Isidro I. Lázaro Castillo, Juan Anzurez Marín szavala@zeus.umich.mx, ilazaro@zeus.umich.mx,
Diseño de un Sistema de Control Lógico Difuso Basado en Microcontroladores de 8 bits Salvador Ramírez Zavala, Isidro I. Lázaro Castillo, Juan Anzurez Marín szavala@zeus.umich.mx, ilazaro@zeus.umich.mx,
Procesos de Fabricación I. Guía 1 1 SISTEMAS DE CONTROL HIDRÁULICO Y NEUMÁTICO
 Procesos de Fabricación I. Guía 1 1 SISTEMAS DE CONTROL HIDRÁULICO Y NEUMÁTICO Sistemas de Control Hidráulico y Neumático. Guía 2 1 Tema: UTILIZACIÓN DE SOFTWARE PARA DISEÑO Y SIMULACIÓN DE CIRCUITOS NEUMÁTICOS.
Procesos de Fabricación I. Guía 1 1 SISTEMAS DE CONTROL HIDRÁULICO Y NEUMÁTICO Sistemas de Control Hidráulico y Neumático. Guía 2 1 Tema: UTILIZACIÓN DE SOFTWARE PARA DISEÑO Y SIMULACIÓN DE CIRCUITOS NEUMÁTICOS.
Simulación de un Regulador Difuso de Velocidad/Frecuencia tipo Takagi-Sugeno para un Motor de CD-Alternador con Lazo de Corriente
 Journal of Vectorial Relativity JVR 4 (9) 4 77-87 Simulación de un Regulador Difuso de Velocidad/Frecuencia tipo Takagi-Sugeno para un Motor de CD-Alternador con Lazo de Corriente J Herrera-Espinosa, V
Journal of Vectorial Relativity JVR 4 (9) 4 77-87 Simulación de un Regulador Difuso de Velocidad/Frecuencia tipo Takagi-Sugeno para un Motor de CD-Alternador con Lazo de Corriente J Herrera-Espinosa, V
Implementación de Hardware / Software para Control Difuso
 Implementación de Hardware / Software para Control Difuso M. en C. Romeo Urbieta Parrazales M. en C. Pablo Manrique Ramírez Ing. Antonio Hernández Zavala; Profesores del CIC-IPN e-mail: rurbieta@cic.ipn.mx
Implementación de Hardware / Software para Control Difuso M. en C. Romeo Urbieta Parrazales M. en C. Pablo Manrique Ramírez Ing. Antonio Hernández Zavala; Profesores del CIC-IPN e-mail: rurbieta@cic.ipn.mx
Universidad Nacional Autónoma de Honduras. Escuela de Física. Electricidad y magnetismo II Fs-415. Filtros Eléctricos y sus aplicaciones
 Universidad Nacional Autónoma de Honduras Escuela de Física Electricidad y magnetismo II Fs-415 Filtros Eléctricos y sus aplicaciones Introducción: Todo circuito eléctrico que tenga incluidas capacitancias
Universidad Nacional Autónoma de Honduras Escuela de Física Electricidad y magnetismo II Fs-415 Filtros Eléctricos y sus aplicaciones Introducción: Todo circuito eléctrico que tenga incluidas capacitancias
Herramientas de Programación. M.C. Juan Carlos Olivares Rojas
 Herramientas de Programación M.C. Juan Carlos Olivares Rojas Febrero 2011 Temario Simbología Reglas para la construcción de Diagramas Pseudocódigo Temario Tipos de Datos y Expresiones Estructuras lógicas
Herramientas de Programación M.C. Juan Carlos Olivares Rojas Febrero 2011 Temario Simbología Reglas para la construcción de Diagramas Pseudocódigo Temario Tipos de Datos y Expresiones Estructuras lógicas
PUERTAS LOGICAS. Una tensión alta significa un 1 binario y una tensión baja significa un 0 binario.
 PUERTAS LOGICAS Son bloques de construcción básica de los sistemas digitales; operan con números binarios, por lo que se denominan puertas lógicas binarias. En los circuitos digitales todos los voltajes,
PUERTAS LOGICAS Son bloques de construcción básica de los sistemas digitales; operan con números binarios, por lo que se denominan puertas lógicas binarias. En los circuitos digitales todos los voltajes,
Pontifica Universidad Católica de Chile Departamento de Ingeniería Eléctrica
 Pontifica Universidad Católica de Chile Departamento de Ingeniería Eléctrica IEE 2682 LABORATORIO DE CONTROL AUTOMÁTICO EXPERIENCIA CONTROLADORES LOGICOS PROGRAMABLES 1. OBJETIVOS Los Controladores Lógicos
Pontifica Universidad Católica de Chile Departamento de Ingeniería Eléctrica IEE 2682 LABORATORIO DE CONTROL AUTOMÁTICO EXPERIENCIA CONTROLADORES LOGICOS PROGRAMABLES 1. OBJETIVOS Los Controladores Lógicos
Funcionamiento del circuito integrado LM 317
 1 1) Concepto de realimentación Funcionamiento del circuito integrado LM 317 En muchas circunstancias es necesario que un sistema trate de mantener alguna magnitud constante por sí mismo. Por ejemplo el
1 1) Concepto de realimentación Funcionamiento del circuito integrado LM 317 En muchas circunstancias es necesario que un sistema trate de mantener alguna magnitud constante por sí mismo. Por ejemplo el
Tema: Excel Formulas, Funciones y Macros
 1 Facultad Escuela Lugar de Ejecución : Ingeniería. : Biomédica : Laboratorio de Biomédica Tema: Excel Formulas, Funciones y Macros Objetivos Específicos Conocer los conceptos básicos en relación a la
1 Facultad Escuela Lugar de Ejecución : Ingeniería. : Biomédica : Laboratorio de Biomédica Tema: Excel Formulas, Funciones y Macros Objetivos Específicos Conocer los conceptos básicos en relación a la
CAPITULO I INTRODUCCIÓN. Diseño Digital
 CAPITULO I INTRODUCCIÓN Diseño Digital QUE ES DISEÑO DIGITAL? UN SISTEMA DIGITAL ES UN CONJUNTO DE DISPOSITIVOS DESTINADOS A LA GENERACIÓN, TRANSMISIÓN, PROCESAMIENTO O ALMACENAMIENTO DE SEÑALES DIGITALES.
CAPITULO I INTRODUCCIÓN Diseño Digital QUE ES DISEÑO DIGITAL? UN SISTEMA DIGITAL ES UN CONJUNTO DE DISPOSITIVOS DESTINADOS A LA GENERACIÓN, TRANSMISIÓN, PROCESAMIENTO O ALMACENAMIENTO DE SEÑALES DIGITALES.
Complejidad de los Algoritmos
 Que es un Algoritmo? Complejidad de los Algoritmos Webster: cualquier método especial para resolver cierta clase de problemas. Horowitz: método preciso utilizable en una computadora para la solución de
Que es un Algoritmo? Complejidad de los Algoritmos Webster: cualquier método especial para resolver cierta clase de problemas. Horowitz: método preciso utilizable en una computadora para la solución de
Welact 2
 Sistema Electromecánico de Actuadores Lineales Índice 3 4 5 6 7 Introducción. Control Características. Aplicaciones. Especificaciones Familia de Equipos Welact Curvas características Codificación de los
Sistema Electromecánico de Actuadores Lineales Índice 3 4 5 6 7 Introducción. Control Características. Aplicaciones. Especificaciones Familia de Equipos Welact Curvas características Codificación de los
Introducción a la Robótica Mecanismos para el control de un robot (5)
") Introducción a la Robótica Mecanismos para el control de un robot (5) Dr Jose M. Carranza carranza@inaoep.mx Coordinación de Ciencias Computacionales, INAOE 3er. Torneo Mexicano de Robots Limpiadores:
Introducción a la Robótica Mecanismos para el control de un robot (5) Dr Jose M. Carranza carranza@inaoep.mx Coordinación de Ciencias Computacionales, INAOE 3er. Torneo Mexicano de Robots Limpiadores:
DETERMINACIÓN DEL HIDROGRAMA DE ESCURRIMIENTO DIRECTO POR EL MÉTODO DE CLARK
 GUIA DE TRABAJO PRACTICO Nº 9 DETERMINACIÓN DEL HIDROGRAMA DE ESCURRIMIENTO DIRECTO POR EL MÉTODO DE CLARK Dadas las características hidrodinámicas presentadas en la cartografía de la cuenca media y baja
GUIA DE TRABAJO PRACTICO Nº 9 DETERMINACIÓN DEL HIDROGRAMA DE ESCURRIMIENTO DIRECTO POR EL MÉTODO DE CLARK Dadas las características hidrodinámicas presentadas en la cartografía de la cuenca media y baja
INFORME DE MONTAJE Y PRUEBAS DEL CIRCUITO ELECTRÓNICO PARA ADQUIRIR LOS POTENCIALES EVOCADOS AUDITIVOS
 INFORME DE MONTAJE Y PRUEBAS DEL CIRCUITO ELECTRÓNICO PARA ADQUIRIR LOS POTENCIALES EVOCADOS AUDITIVOS ACTIVIDADES: A02-2: Diseño de los circuitos electrónicos A02-3: Montaje y pruebas en protoboard de
INFORME DE MONTAJE Y PRUEBAS DEL CIRCUITO ELECTRÓNICO PARA ADQUIRIR LOS POTENCIALES EVOCADOS AUDITIVOS ACTIVIDADES: A02-2: Diseño de los circuitos electrónicos A02-3: Montaje y pruebas en protoboard de
Universidad Autónoma del Estado de México Licenciatura en Ingeniería en Sistemas Energéticos Sustentables
 Universidad Autónoma del Estado de México Licenciatura en Ingeniería en Sistemas Energéticos Sustentables Programa de estudio de la unidad de aprendizaje: I. Datos de identificación Espacio educativo donde
Universidad Autónoma del Estado de México Licenciatura en Ingeniería en Sistemas Energéticos Sustentables Programa de estudio de la unidad de aprendizaje: I. Datos de identificación Espacio educativo donde
Universidad Tecnológica Nacional Facultad Regional Buenos Aires Secretaría de Ciencia y Tecnología. Seminario IA y R
 Página 1 de 8 5 Control de motores PWM con lógica difusa Leonardo S. Muruaga muru_seba@yahoo.com.ar Resumen- Actualmente el control de motores de corriente continua (CC) manejados por el método de Pulse
Página 1 de 8 5 Control de motores PWM con lógica difusa Leonardo S. Muruaga muru_seba@yahoo.com.ar Resumen- Actualmente el control de motores de corriente continua (CC) manejados por el método de Pulse
: Algorítmica y Estructura de Datos I
 FACULTAD POLITÉCNICA DIRECCIÓN ACADÉMICA PROGRAMA DE ESTUDIO I. IDENTIFICACIÓN Carrera : Ingeniería de Sistemas CARGA HORARIA (Horas reloj) Asignatura : Algorítmica y Estructura de Datos I Carga Horaria
FACULTAD POLITÉCNICA DIRECCIÓN ACADÉMICA PROGRAMA DE ESTUDIO I. IDENTIFICACIÓN Carrera : Ingeniería de Sistemas CARGA HORARIA (Horas reloj) Asignatura : Algorítmica y Estructura de Datos I Carga Horaria
Curso AVANZADO DE EXCEL 2013
 Curso AVANZADO DE EXCEL 2013 DÍAS: 3, 5, 6, 10 y 13 de octubre LUGAR: F4 (día 3) y F5 (días 5, 6, 10 y 13) Nº DE PLAZAS: 20 HORARIO: de 15:30 a 20:30 h INSCRIPCIÓN: A partir del 5 de septiembre, por orden
Curso AVANZADO DE EXCEL 2013 DÍAS: 3, 5, 6, 10 y 13 de octubre LUGAR: F4 (día 3) y F5 (días 5, 6, 10 y 13) Nº DE PLAZAS: 20 HORARIO: de 15:30 a 20:30 h INSCRIPCIÓN: A partir del 5 de septiembre, por orden
CONTSIMUL - Control y Simulación de Procesos Industriales
 Unidad responsable: Unidad que imparte: Curso: Titulación: Créditos ECTS: 2016 840 - EUPMT - Escuela Universitaria Politécnica de Mataró 840 - EUPMT - Escuela Universitaria Politécnica de Mataró GRADO
Unidad responsable: Unidad que imparte: Curso: Titulación: Créditos ECTS: 2016 840 - EUPMT - Escuela Universitaria Politécnica de Mataró 840 - EUPMT - Escuela Universitaria Politécnica de Mataró GRADO
II
 II III IV 5 6 7 8 9 I. Considere los siguientes conjuntos y con ellos realice las siguientes operaciones y sus respectivos diagramas de Venn: A x 3 x 6 B x 1 x 10 C x x es par primo x 10 x 10 i). A B.
II III IV 5 6 7 8 9 I. Considere los siguientes conjuntos y con ellos realice las siguientes operaciones y sus respectivos diagramas de Venn: A x 3 x 6 B x 1 x 10 C x x es par primo x 10 x 10 i). A B.
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS Facultad de Ingeniería Departamento de Ing. Eléctrica Electrónica II
 INTEGRADOR, DERIVADOR Y RECTIFICADOR DE ONDA CON AMPLIFICADORES OPERACIONALES LAURA MAYERLY ÁLVAREZ JIMENEZ (20112007040) MARÍA ALEJANDRA MEDINA OSPINA (20112007050) RESUMEN En esta práctica de laboratorio
INTEGRADOR, DERIVADOR Y RECTIFICADOR DE ONDA CON AMPLIFICADORES OPERACIONALES LAURA MAYERLY ÁLVAREZ JIMENEZ (20112007040) MARÍA ALEJANDRA MEDINA OSPINA (20112007050) RESUMEN En esta práctica de laboratorio
Sistemas Electrónicos Digitales
 Sistemas Electrónicos Digitales Profesor: Carlos Herrera C. I. Unidad COMPUERTAS LOGICAS Las compuertas lógicas son dispositivos que operan con aquellos estados lógicos Binarios y que funcionan igual que
Sistemas Electrónicos Digitales Profesor: Carlos Herrera C. I. Unidad COMPUERTAS LOGICAS Las compuertas lógicas son dispositivos que operan con aquellos estados lógicos Binarios y que funcionan igual que
Control Difuso PID de un Sistema de Control para una Grúa Puente
 Control Difuso PID de un Sistema de Control para una Grúa Puente Ing. Juan José Salas Cervantes, Dr. Dennis Barrios Aranibar 1. Introducción En las grúas puente el problema que al movilizar cargas de un
Control Difuso PID de un Sistema de Control para una Grúa Puente Ing. Juan José Salas Cervantes, Dr. Dennis Barrios Aranibar 1. Introducción En las grúas puente el problema que al movilizar cargas de un
CONTROLADOR PID. Jorge Luis Mírez Tarrillo. Ing Mecánio Electricista Maestro en Ciencias mención Física
 CONTROLADOR PID Jorge Luis Mírez Tarrillo Ing Mecánio Electricista Maestro en Ciencias mención Física Es una estructura de control que es casi universalmente utilizada en la industria. Se trata de la familia
CONTROLADOR PID Jorge Luis Mírez Tarrillo Ing Mecánio Electricista Maestro en Ciencias mención Física Es una estructura de control que es casi universalmente utilizada en la industria. Se trata de la familia
IV. EL ESTUDIO TECNICO
 IV. EL ESTUDIO TECNICO A. ANÁLISIS DE LOS ASPECTOS TÉCNICOS 1. LA INVERSIÓN, LA TECNOLOGÍA Y EL ALCANCE DEL ESTUDIO TÉCNICO DE INGENIERÍA El objetivo es determinar la función de producción óptima para
IV. EL ESTUDIO TECNICO A. ANÁLISIS DE LOS ASPECTOS TÉCNICOS 1. LA INVERSIÓN, LA TECNOLOGÍA Y EL ALCANCE DEL ESTUDIO TÉCNICO DE INGENIERÍA El objetivo es determinar la función de producción óptima para
El sistema a identificar es el conjunto motor eléctrico-freno siguiente:
 Sistema a identificar El sistema a identificar es el conjunto motor eléctrico-freno siguiente: Relación entrada-salida Las variables de entrada-salida a considerar para la identificación del sistema es
Sistema a identificar El sistema a identificar es el conjunto motor eléctrico-freno siguiente: Relación entrada-salida Las variables de entrada-salida a considerar para la identificación del sistema es
PRÁCTICAS DE ELECTRICIDAD Y ELECTRÓNICA CON CROCODILE. Lucía Defez Sánchez Profesora de la asignatura tecnología en la ESO
 PRÁCTICAS DE ELECTRICIDAD Y ELECTRÓNICA CON CROCODILE Lucía Defez Sánchez Profesora de la asignatura tecnología en la ESO 1 OBJETO Se elabora el presente cuaderno de prácticas con el fin de facilitar la
PRÁCTICAS DE ELECTRICIDAD Y ELECTRÓNICA CON CROCODILE Lucía Defez Sánchez Profesora de la asignatura tecnología en la ESO 1 OBJETO Se elabora el presente cuaderno de prácticas con el fin de facilitar la
Descripción y Contenido del Curso. Programación C++ Capacity Academy.
 Descripción y Contenido del Curso Programación C++ Capacity Academy Educación en Tecnología de la Información Online, Efectiva y Garantizada Qué aprenderá si toma este Curso? En este curso aprenderás todo
Descripción y Contenido del Curso Programación C++ Capacity Academy Educación en Tecnología de la Información Online, Efectiva y Garantizada Qué aprenderá si toma este Curso? En este curso aprenderás todo
Fundamentos de Electrónica de Potencia Ingeniero Técnico Industrial. Especialidad Electricidad Departamento de Tecnología Electrónica
 Ingeniero Técnico Industrial. Especialidad Electricidad Departamento de Tecnología Electrónica OCW- Universidad de Málaga http://ocw.uma.es Trujillo, F.D.; Pozo, A; Triviño, A (2011) Electrónica de Potencia.
Ingeniero Técnico Industrial. Especialidad Electricidad Departamento de Tecnología Electrónica OCW- Universidad de Málaga http://ocw.uma.es Trujillo, F.D.; Pozo, A; Triviño, A (2011) Electrónica de Potencia.
DISEÑO Y CONSTRUCCION DE UN SISTEMA DE RECTIFICACION CONTROLADO APLICADO A UN MOTOR DC
 DISEÑO Y CONSTRUCCION DE UN SISTEMA DE RECTIFICACION CONTROLADO APLICADO A UN MOTOR DC Gunther Andrade 1, Guillermo Eras 2, Jazmín Llerena 3, Fabricio Ordóñez 4, Norman Chootong 5 RESUMEN El objetivo de
DISEÑO Y CONSTRUCCION DE UN SISTEMA DE RECTIFICACION CONTROLADO APLICADO A UN MOTOR DC Gunther Andrade 1, Guillermo Eras 2, Jazmín Llerena 3, Fabricio Ordóñez 4, Norman Chootong 5 RESUMEN El objetivo de
Lección 1 Automatización Industrial. Lección 2 Qué es el PLC?
 -1- Lección 1 Automatización Industrial Grado de automatización Accionamientos Controlador Lógico Programable Lección 2 Qué es el PLC? Sistemas de Control Sistemas de Control de Lazo Abierto Sistemas de
-1- Lección 1 Automatización Industrial Grado de automatización Accionamientos Controlador Lógico Programable Lección 2 Qué es el PLC? Sistemas de Control Sistemas de Control de Lazo Abierto Sistemas de
Prontuario de fórmulas para el cálculo curvas verticales parabólicas
 Prontuario de fórmulas para el cálculo curvas verticales parabólicas Índice ) plicación B) Criterios de Diseño C) Cálculo de los elementos de la curva parabólica.- Longitud. Curvas en cresta a) Criterios
Prontuario de fórmulas para el cálculo curvas verticales parabólicas Índice ) plicación B) Criterios de Diseño C) Cálculo de los elementos de la curva parabólica.- Longitud. Curvas en cresta a) Criterios
CENTRO UNIVERSITARIO DE CIENCIAS EXACTAS E INGENIERÍAS DIVISIÓN DE ELECTRÓNICA Y COMPUTACIÓN
 DATOS DE IDENTIFICACIÓN DEL CURSO DEPARTAMENTO: ACADEMIA A LA QUE PERTENECE: NOMBRE DE LA MATERIA: CLAVE DE LA MATERIA: CARÁCTER DEL CURSO: TIPO DE CURSO: Electrónica Instrumentación Electrónica CONTROL
DATOS DE IDENTIFICACIÓN DEL CURSO DEPARTAMENTO: ACADEMIA A LA QUE PERTENECE: NOMBRE DE LA MATERIA: CLAVE DE LA MATERIA: CARÁCTER DEL CURSO: TIPO DE CURSO: Electrónica Instrumentación Electrónica CONTROL

Álgebra Lineal Ma1010
 Álgebra Lineal Ma1010 Departamento de Matemáticas ITESM Álgebra Lineal - p. 1/16 En esta lectura veremos el proceso para obtener la factorización QR de una matriz. Esta factorización es utilizada para
Álgebra Lineal Ma1010 Departamento de Matemáticas ITESM Álgebra Lineal - p. 1/16 En esta lectura veremos el proceso para obtener la factorización QR de una matriz. Esta factorización es utilizada para
Objetos de aprendizaje: Computadora
 MOMENTO I. BLOQUE 1. Opera las funciones básicas del sistema operativo y garantiza la seguridad de la información Objetos de aprendizaje: Computadora Lectura 1: La Computadora La computadora es una máquina
MOMENTO I. BLOQUE 1. Opera las funciones básicas del sistema operativo y garantiza la seguridad de la información Objetos de aprendizaje: Computadora Lectura 1: La Computadora La computadora es una máquina
Java para no Programadores
 Java para no Programadores Programa de Estudio Java para no Programadores Aprende a programar con una de las tecnologías más utilizadas en el mercado de IT. Este curso está orientado a quienes no tienen
Java para no Programadores Programa de Estudio Java para no Programadores Aprende a programar con una de las tecnologías más utilizadas en el mercado de IT. Este curso está orientado a quienes no tienen
MODELOS DE INVESTIGACION DE OPERACIONES
 MODELOS DE INVESTIGACION DE OPERACIONES CARACTERÍSTICAS Los modelos se dividen en determinísticos (no probabilisticos) y estocásticos (probilisticos). Hay otros modelos híbridos porque incluyen las dos
MODELOS DE INVESTIGACION DE OPERACIONES CARACTERÍSTICAS Los modelos se dividen en determinísticos (no probabilisticos) y estocásticos (probilisticos). Hay otros modelos híbridos porque incluyen las dos
PLAN DE MATERIAS ACADEMUSOFT 3.2
 FACULTAD DE: _Ingenierías y Tecnológicas PROGRAMA DE: Ingeniería de Sistemas NOMBRE DE LA MATERIA: Programación II Semestre: III Código: _IS006SA No de Créditos 4 H. Teórica: 4 H. Práctica 2 H. Teórica-Practica
FACULTAD DE: _Ingenierías y Tecnológicas PROGRAMA DE: Ingeniería de Sistemas NOMBRE DE LA MATERIA: Programación II Semestre: III Código: _IS006SA No de Créditos 4 H. Teórica: 4 H. Práctica 2 H. Teórica-Practica
ELT 3880 INSTRUMENTACION LABORATORIO No.5 PROGRAMACIÓN DE LOS CONTROLADORES DIGITALES UNIVERSALES UDC 2000, E5CK y N3000
 UNIVERSIDAD TÉCNICA DE ORURO FACULTAD NACIONAL DE INGENIERÍA CARRERA DE INGENIERÍA ELÉCTRICA ELECTRÓNICA LABORATORIO DE CONTROL E INSTRUMENTACIÓN 1 ELT 3880 INSTRUMENTACION LABORATORIO No.5 PROGRAMACIÓN
UNIVERSIDAD TÉCNICA DE ORURO FACULTAD NACIONAL DE INGENIERÍA CARRERA DE INGENIERÍA ELÉCTRICA ELECTRÓNICA LABORATORIO DE CONTROL E INSTRUMENTACIÓN 1 ELT 3880 INSTRUMENTACION LABORATORIO No.5 PROGRAMACIÓN
Fundamentos de programación y Bases de Datos
 Fundamentos de programación y Bases de Datos Duración: 25.00 horas Descripción En la actualidad la mayoría de nuestra vida esta basada en el uso de programas informáticos. Para desarrollar un programa
Fundamentos de programación y Bases de Datos Duración: 25.00 horas Descripción En la actualidad la mayoría de nuestra vida esta basada en el uso de programas informáticos. Para desarrollar un programa
LABORATORIO DE ELECTRÓNICA. PRÁCTICA 7 El Temporizador 555
 o Ingeniería de Telecomunicación. Segundo Cuatrimestre LABOATOIO DE ELECTÓNICA PÁCTICA El Temporizador Material necesario: Circuitos integrados: - LMC Condensadores: - 0,0 µf - 0, µf Potenciómetros: -
o Ingeniería de Telecomunicación. Segundo Cuatrimestre LABOATOIO DE ELECTÓNICA PÁCTICA El Temporizador Material necesario: Circuitos integrados: - LMC Condensadores: - 0,0 µf - 0, µf Potenciómetros: -
Universidad Católica de Santiago del Estero Facultad de Matemática Aplicada Carrera de Ingeniería en Electrónica
 PLANIFICACIÓN DE CÁTEDRA AÑO: 2006 1. IDENTIFICACION. 1.1.Asignatura: INFORMÁTICA 1.2.Carrera: Ingeniería en Electrónica. 1.3.Régimen: Primer cuatrimestre. 1.4.Promoción: Con examen final. 1.5. Correlativas:
PLANIFICACIÓN DE CÁTEDRA AÑO: 2006 1. IDENTIFICACION. 1.1.Asignatura: INFORMÁTICA 1.2.Carrera: Ingeniería en Electrónica. 1.3.Régimen: Primer cuatrimestre. 1.4.Promoción: Con examen final. 1.5. Correlativas:
UNIVERSIDAD PEDAGÓGICA Y TECNOLÓGICA DE COLOMBIA FACULTAD DE CIENCIAS PROGRAMA DE MATEMÁTICAS PLAN DE ESTUDIOS
 UNIVERSIDAD PEDAGÓGICA Y TECNOLÓGICA DE COLOMBIA FACULTAD DE CIENCIAS PROGRAMA DE MATEMÁTICAS PLAN DE ESTUDIOS ASIGNATURA : ELECTIVA I - PROGRAMACION CÓDIGO : 8104661 SEMESTRE : IV CRÉDITOS : 4 FECHA DE
UNIVERSIDAD PEDAGÓGICA Y TECNOLÓGICA DE COLOMBIA FACULTAD DE CIENCIAS PROGRAMA DE MATEMÁTICAS PLAN DE ESTUDIOS ASIGNATURA : ELECTIVA I - PROGRAMACION CÓDIGO : 8104661 SEMESTRE : IV CRÉDITOS : 4 FECHA DE
Fuerzas no conservativas y balance energético
 Fuerzas no conservativas y balance energético Módulo 2 Física Mecánica I-2016 Antonella Cid M. Departamento de Física Universidad del Bío-Bío Conservación de la energía mecánica La energía mecánica se
Fuerzas no conservativas y balance energético Módulo 2 Física Mecánica I-2016 Antonella Cid M. Departamento de Física Universidad del Bío-Bío Conservación de la energía mecánica La energía mecánica se
Constantes. Variables
 Constantes En el pseudocódigo la deinición de constantes generalmente se hace al principio. Es utilizada para deinir valores que nunca van a cambiar. Tipos de datos Variables Los datos que utilizan los
Constantes En el pseudocódigo la deinición de constantes generalmente se hace al principio. Es utilizada para deinir valores que nunca van a cambiar. Tipos de datos Variables Los datos que utilizan los
Diseño Estructurado de Algoritmos
 Diseño Estructurado de Algoritmos 1 Sesión No. 1 Nombre: Conceptos de algoritmos Objetivo de la sesión: Al concluir la sesión el estudiante identificará los conceptos básicos sobre la definición de algoritmos
Diseño Estructurado de Algoritmos 1 Sesión No. 1 Nombre: Conceptos de algoritmos Objetivo de la sesión: Al concluir la sesión el estudiante identificará los conceptos básicos sobre la definición de algoritmos
Universidad de Guanajuato Tronco Común de Ingenierías
 Universidad de Guanajuato Tronco Común de Ingenierías Objetivo del Area: Diseñar modelos matemáticos y proponer alternativas de solución a problemas. Programa. AREA: Matemáticas MATERIA: Lenguaje de Programación
Universidad de Guanajuato Tronco Común de Ingenierías Objetivo del Area: Diseñar modelos matemáticos y proponer alternativas de solución a problemas. Programa. AREA: Matemáticas MATERIA: Lenguaje de Programación
Sistema de Control Página 1 de 6. Código:
 Sistema de Control Página 1 de 6 Programa de: Sistemas de Control UNIVERSIDAD NACIONAL DE CÓRDOBA Facultad de Ciencias Exactas, Físicas y Naturales República Argentina Carrera: Ingeniería Mecánica Escuela:
Sistema de Control Página 1 de 6 Programa de: Sistemas de Control UNIVERSIDAD NACIONAL DE CÓRDOBA Facultad de Ciencias Exactas, Físicas y Naturales República Argentina Carrera: Ingeniería Mecánica Escuela:
Principios de Programación en Java
 Programa: Curso - Taller Principios de Programación en Java Fechas: 20, 21, 22, 23 y 24 de junio, 2016 de 16:00 a 19:00 hrs Lugar: Preparatoria Vespertina No 1. Centro de Cómputo Instructor del Curso:
Programa: Curso - Taller Principios de Programación en Java Fechas: 20, 21, 22, 23 y 24 de junio, 2016 de 16:00 a 19:00 hrs Lugar: Preparatoria Vespertina No 1. Centro de Cómputo Instructor del Curso:
PUERTAS LOGICAS. Objetivo específico Conectar los circuitos integrados CI TTL Comprobar el funcionamiento lógico del AND, OR, NOT, NAND y NOR
 Cód. 25243 Laboratorio electrónico Nº 5 PUERTAS LOGICAS Objetivo Aplicar los conocimientos de puertas lógicas Familiarizarse con los circuitos integrados Objetivo específico Conectar los circuitos integrados
Cód. 25243 Laboratorio electrónico Nº 5 PUERTAS LOGICAS Objetivo Aplicar los conocimientos de puertas lógicas Familiarizarse con los circuitos integrados Objetivo específico Conectar los circuitos integrados
CORRIENTE CONTINUA I : RESISTENCIA INTERNA DE UNA FUENTE
 eman ta zabal zazu Departamento de Física de la Materia Condensada universidad del país vasco euskal herriko unibertsitatea FACULTAD DE CIENCIA Y TECNOLOGÍA UNIVERSIDAD DEL PAÍS VASCO DEPARTAMENTO de FÍSICA
eman ta zabal zazu Departamento de Física de la Materia Condensada universidad del país vasco euskal herriko unibertsitatea FACULTAD DE CIENCIA Y TECNOLOGÍA UNIVERSIDAD DEL PAÍS VASCO DEPARTAMENTO de FÍSICA
UNIVERSIDAD CENTROAMERICANA JOSÉ SIMEÓN CAÑAS
 UNIVERSIDAD CENTROAMERICANA JOSÉ SIMEÓN CAÑAS ESTUDIO DE LA UTILIZACIÓN DE SISTEMAS GEOTÉRMICOS (GSHP) DEL TIPO TIERRA/AIRE, PARA EL ACONDICIONAMIENTO DE ESPACIOS HABITADOS EN EL SALVADOR INTEGRANTES Ing.
UNIVERSIDAD CENTROAMERICANA JOSÉ SIMEÓN CAÑAS ESTUDIO DE LA UTILIZACIÓN DE SISTEMAS GEOTÉRMICOS (GSHP) DEL TIPO TIERRA/AIRE, PARA EL ACONDICIONAMIENTO DE ESPACIOS HABITADOS EN EL SALVADOR INTEGRANTES Ing.
Conceptos básicos de metrología
 Conceptos básicos de metrología Definiciones, características y estimación de incertidumbres. Lic. Francisco Sequeira Castro 05 de Noviembre, 2014 Qué es la metrología? La metrología es la ciencia de las
Conceptos básicos de metrología Definiciones, características y estimación de incertidumbres. Lic. Francisco Sequeira Castro 05 de Noviembre, 2014 Qué es la metrología? La metrología es la ciencia de las
Laboratorio de Física para Ingeniería
 Laboratorio de para Ingeniería 1. Al medir la longitud de un cilindro se obtuvieron las siguientes medidas: x [cm] 8,45 8,10 8,40 8,55 8,45 8,30 Al expresar la medida en la forma x = x + x resulta: (a)
Laboratorio de para Ingeniería 1. Al medir la longitud de un cilindro se obtuvieron las siguientes medidas: x [cm] 8,45 8,10 8,40 8,55 8,45 8,30 Al expresar la medida en la forma x = x + x resulta: (a)
Proyecto: Control de motor de corriente directa Como parte de este proyecto deben llevarse a cabo las siguientes actividades:
 Proyecto: Control de motor de corriente directa Diseño de un convertidor dc-dc. Definir configuración. Calcular parámetros iniciales de los elementos del convertidor a partir de la representación matemática
Proyecto: Control de motor de corriente directa Diseño de un convertidor dc-dc. Definir configuración. Calcular parámetros iniciales de los elementos del convertidor a partir de la representación matemática
CERTIFICADO DE APTITUD PROFESIONAL DE CONDUCTORES (CAP)
") CERTIFICADO DE APTITUD PROFESIONAL DE CONDUCTORES (CAP) CERTIFICADO DE APTITUD PROFESIONAL DE CONDUCTORES (CAP) Horas: 3 Teoría: 2 Práctica: 10 Presenciales: 3 A Distancia: 0 Acción: 832 Nº Grupo: 101
CERTIFICADO DE APTITUD PROFESIONAL DE CONDUCTORES (CAP) CERTIFICADO DE APTITUD PROFESIONAL DE CONDUCTORES (CAP) Horas: 3 Teoría: 2 Práctica: 10 Presenciales: 3 A Distancia: 0 Acción: 832 Nº Grupo: 101
DISEÑO CURRICULAR ALGEBRA LINEAL
 DISEÑO CURRICULAR ALGEBRA LINEAL FACULTAD (ES) CARRERA (S) Ingeniería Computación y Sistemas CÓDIGO HORAS TEÓRICAS HORAS PRÁCTICAS UNIDADES DE CRÉDITO SEMESTRE 122443 02 02 03 II PRE-REQUISITO ELABORADO
DISEÑO CURRICULAR ALGEBRA LINEAL FACULTAD (ES) CARRERA (S) Ingeniería Computación y Sistemas CÓDIGO HORAS TEÓRICAS HORAS PRÁCTICAS UNIDADES DE CRÉDITO SEMESTRE 122443 02 02 03 II PRE-REQUISITO ELABORADO
Diseño y Análisis de Controladores para un robot de 3GDL con capacidad de dibujo
 Diseño y Análisis de Controladores para un robot de 3GDL con capacidad de dibujo J. Albites, M. Rimachi y J. Paucar. MSc. Ing. N. Anchayhua Abstract El presente trabajo muestra el diseño de controladores
Diseño y Análisis de Controladores para un robot de 3GDL con capacidad de dibujo J. Albites, M. Rimachi y J. Paucar. MSc. Ing. N. Anchayhua Abstract El presente trabajo muestra el diseño de controladores
SCD. SOFTWARE PAR:4 El CONTROl DE SISTEMAS USANDO TECNICAS DIFUSAS.
 40. SBAI - Simpósio Brasileiro de Automação Inteligente, São Paulo, SP. 08-10 de Setembro de 1999 SCD. SOFTWARE PAR:4 El CONTROl DE SISTEMAS USANDO TECNICAS DIFUSAS. Oscar Mauricio Agudelo Maiíozca Diego
40. SBAI - Simpósio Brasileiro de Automação Inteligente, São Paulo, SP. 08-10 de Setembro de 1999 SCD. SOFTWARE PAR:4 El CONTROl DE SISTEMAS USANDO TECNICAS DIFUSAS. Oscar Mauricio Agudelo Maiíozca Diego
[ GUÍA DIDÁCTICA: DESARROLLO DE ALGORITMOS PSEINT] 11 de julio de 2013
![[ GUÍA DIDÁCTICA: DESARROLLO DE ALGORITMOS PSEINT] 11 de julio de 2013](/thumbs/48/24018641.jpg "[ GUÍA DIDÁCTICA: DESARROLLO DE ALGORITMOS PSEINT] 11 de julio de 2013") ALGORITMOS Y DIAGRAMAS DE FLUJOS DE DATOS Elementos del diagrama de flujo de datos A.1. Qué es un Algoritmo? Describe el método para realizar una tarea. Es una secuencia de instrucciones que, ejecutadas
ALGORITMOS Y DIAGRAMAS DE FLUJOS DE DATOS Elementos del diagrama de flujo de datos A.1. Qué es un Algoritmo? Describe el método para realizar una tarea. Es una secuencia de instrucciones que, ejecutadas
Práctica 1 Transistor BJT Región de Corte Saturación Aplicaciones
 Práctica 1 Transistor BJT Región de Corte Saturación Aplicaciones Universidad de San Carlos de Guatemala, Facultad de Ingeniería, Escuela de Mecánica Eléctrica, Laboratorio de Electrónica 1, Segundo Semestre
Práctica 1 Transistor BJT Región de Corte Saturación Aplicaciones Universidad de San Carlos de Guatemala, Facultad de Ingeniería, Escuela de Mecánica Eléctrica, Laboratorio de Electrónica 1, Segundo Semestre
CAPÍTULO 4 DISEÑO EN PERFIL DEL EJE DE LA CARRETERA
 CAPÍTULO 4 DISEÑO EN PERFIL DEL EJE DE LA CARRETERA Instituto Nacional de Vías Manual de Diseño Geométrico de Carreteras 126 Capítulo 4 Diseño en Perfil del Eje de la carretera CAPITULO 4. DISEÑO EN PERFIL
CAPÍTULO 4 DISEÑO EN PERFIL DEL EJE DE LA CARRETERA Instituto Nacional de Vías Manual de Diseño Geométrico de Carreteras 126 Capítulo 4 Diseño en Perfil del Eje de la carretera CAPITULO 4. DISEÑO EN PERFIL
PROGRAMACIÓN. UNIDAD II. ALGORITMO PROFA : HAU MOY
 PROGRAMACIÓN. UNIDAD II. ALGORITMO PROFA : HAU MOY ALGORITMO DEFINICIÓN: CONSISTE EN LA DESCRIPCIÓN CLARA Y DETALLADA DEL PROCEDIMIENTO A SEGUIR PARA ALCANZAR LA SOLUCIÓN A UN PROBLEMA EN DONDE SE ESTABLECE
PROGRAMACIÓN. UNIDAD II. ALGORITMO PROFA : HAU MOY ALGORITMO DEFINICIÓN: CONSISTE EN LA DESCRIPCIÓN CLARA Y DETALLADA DEL PROCEDIMIENTO A SEGUIR PARA ALCANZAR LA SOLUCIÓN A UN PROBLEMA EN DONDE SE ESTABLECE
DEFINICIONES Y CONCEPTOS (SISTEMAS DE PERCEPCIÓN - DTE) Curso
 Curso") DEFINICIONES Y CONCEPTOS (SISTEMAS DE PERCEPCIÓN - DTE) Curso 2009-10 1. Generalidades Instrumentación: En general la instrumentación comprende todas las técnicas, equipos y metodología relacionados con
DEFINICIONES Y CONCEPTOS (SISTEMAS DE PERCEPCIÓN - DTE) Curso 2009-10 1. Generalidades Instrumentación: En general la instrumentación comprende todas las técnicas, equipos y metodología relacionados con
UNIVERSIDAD AUTÓNOMA DE BAJA CALIFORNIA SUR. Ingeniería Aplicada TEÓRICA SERIACIÓN 100% DE OPTATIVAS DISCIPLINARIAS
 UNIVERSIDAD AUTÓNOMA DE BAJA CALIFORNIA SUR DEPARTAMENTO ACADÉMICO DE SIS COMPUTACIONALES INGENIERÍA EN TECNOLOGÍA COMPUTACIONAL ASIGNATURA Algoritmo Genéticos ÁREA DE Ingeniería Aplicada CONOCIMIENTO
UNIVERSIDAD AUTÓNOMA DE BAJA CALIFORNIA SUR DEPARTAMENTO ACADÉMICO DE SIS COMPUTACIONALES INGENIERÍA EN TECNOLOGÍA COMPUTACIONAL ASIGNATURA Algoritmo Genéticos ÁREA DE Ingeniería Aplicada CONOCIMIENTO
LABORATORIO No. 3 MODELAMIENTO Y ANALISIS DINAMICO DE SISTEMAS ELECTRICOS
 UNIVERSIDAD FRANCISCO DE PAULA SANTANDER FACULTAD DE INGENIERIA INGENIERÍA ELECTRÓNICA 1 SISTEMAS DINAMICOS 1160601 LABORATORIO No. 3 MODELAMIENTO Y ANALISIS DINAMICO DE SISTEMAS ELECTRICOS INSTRUCCIONES
UNIVERSIDAD FRANCISCO DE PAULA SANTANDER FACULTAD DE INGENIERIA INGENIERÍA ELECTRÓNICA 1 SISTEMAS DINAMICOS 1160601 LABORATORIO No. 3 MODELAMIENTO Y ANALISIS DINAMICO DE SISTEMAS ELECTRICOS INSTRUCCIONES
El número decimal 57, en formato binario es igual a:
 CURSO: ELECTRÓNICA DIGITAL UNIDAD 1: COMPUERTAS LÓGICAS - TEORÍA PROFESOR: JORGE ANTONIO POLANÍA 1. NÚMEROS BINARIOS EJEMPLO En el cuadro anterior, está la representación de los números binarios en formato
CURSO: ELECTRÓNICA DIGITAL UNIDAD 1: COMPUERTAS LÓGICAS - TEORÍA PROFESOR: JORGE ANTONIO POLANÍA 1. NÚMEROS BINARIOS EJEMPLO En el cuadro anterior, está la representación de los números binarios en formato
UNIVERSIDAD NACIONAL MAYOR DE SAN MARCOS (Universidad del Perú, DECANA DE AMÉRICA) SYLLABO
 SYLLABO") UNIVERSIDAD NACIONAL MAYOR DE SAN MARCOS (Universidad del Perú, DECANA DE AMÉRICA) FACULTAD DE INGENIERIA DE SISTEMAS E INFORMATICA Escuela Académico Profesional de Ingeniería de Sistemas 1. ESPECIFICACIONES
UNIVERSIDAD NACIONAL MAYOR DE SAN MARCOS (Universidad del Perú, DECANA DE AMÉRICA) FACULTAD DE INGENIERIA DE SISTEMAS E INFORMATICA Escuela Académico Profesional de Ingeniería de Sistemas 1. ESPECIFICACIONES
Microchip Tips & Tricks...
 ARTICULO TECNICO Microchip Tips & Tricks... Por el Departamento de Ingeniería de EduDevices. Soluciones de Control de Motores en DC. Introducción: Cada circuito para controlar un motor puede ser dividido
ARTICULO TECNICO Microchip Tips & Tricks... Por el Departamento de Ingeniería de EduDevices. Soluciones de Control de Motores en DC. Introducción: Cada circuito para controlar un motor puede ser dividido
INTRODUCCIÓN. En este documento, se describe el manual de usuario del Controlador Neuro-
 INTRODUCCIÓN En este documento, se describe el manual de usuario del Controlador Neuro- Difuso. Este manual es una herramienta básica para que el usuario entienda el funcionamiento del control de una Grúa
INTRODUCCIÓN En este documento, se describe el manual de usuario del Controlador Neuro- Difuso. Este manual es una herramienta básica para que el usuario entienda el funcionamiento del control de una Grúa
Redes bayesianas temporales para reconocimiento de escenarios
 Redes bayesianas temporales para reconocimiento de escenarios Ahmed Ziani and Cina Motamed Visión de Alto Nivel Dr. Enrique Sucar Irvin Hussein López Nava Junio 2009 Introducción (1) Objetivo: aplicaciones
Redes bayesianas temporales para reconocimiento de escenarios Ahmed Ziani and Cina Motamed Visión de Alto Nivel Dr. Enrique Sucar Irvin Hussein López Nava Junio 2009 Introducción (1) Objetivo: aplicaciones
Guía práctica de estudio 05: Diagramas de flujo
 Guía práctica de estudio 05: Diagramas de flujo Elaborado por: M.C. Edgar E. García Cano Ing. Jorge A. Solano Gálvez Revisado por: Ing. Laura Sandoval Montaño Guía práctica de estudio 05: Diagramas de
Guía práctica de estudio 05: Diagramas de flujo Elaborado por: M.C. Edgar E. García Cano Ing. Jorge A. Solano Gálvez Revisado por: Ing. Laura Sandoval Montaño Guía práctica de estudio 05: Diagramas de
Práctica 4 Control de posición y velocidad de un motor de corriente continua
 Práctica 4 Control de posición y velocidad de un motor de corriente continua Maqueta de control de posición y velocidad Practicas de Regulación Automática Maqueta de control de posición y velocidad Caja
Práctica 4 Control de posición y velocidad de un motor de corriente continua Maqueta de control de posición y velocidad Practicas de Regulación Automática Maqueta de control de posición y velocidad Caja
Estructura del Computador
 Estructura del Computador 1 definiciones preliminares Estructura: es la forma en que los componentes están interrelacionados Función: la operación de cada componente individual como parte de la estructura.
Estructura del Computador 1 definiciones preliminares Estructura: es la forma en que los componentes están interrelacionados Función: la operación de cada componente individual como parte de la estructura.
Estructuras en LabVIEW.
 Estructuras en LabVIEW. Sumario: 1. Ejecución según el flujo de datos. 2. Estructuras básicas disponibles en LabVIEW. a) Estructura Sequence. b) Estructura Case. c) Estructura For Loop. d) Estructura While
Estructuras en LabVIEW. Sumario: 1. Ejecución según el flujo de datos. 2. Estructuras básicas disponibles en LabVIEW. a) Estructura Sequence. b) Estructura Case. c) Estructura For Loop. d) Estructura While
TEMA 3: CONTROL AVANZADO CON VARIABLES AUXILIARES
 Técnicas del CRA: más de una variable manipulada/controlada/perturbación Contenido: 3.1 Introducción 3.2 Control en cascada 3.3 Control anticipativo Anticipativo incremental. Anticipativo estático. Control
Técnicas del CRA: más de una variable manipulada/controlada/perturbación Contenido: 3.1 Introducción 3.2 Control en cascada 3.3 Control anticipativo Anticipativo incremental. Anticipativo estático. Control
Control de Procesos Industriales 1. INTRODUCCIÓN
 Control de Procesos Industriales 1. INTRODUCCIÓN por Pascual Campoy Universidad Politécnica Madrid U.P.M.-DISAM P. Campoy Control de Procesos Industriales 1 Control de Procesos Industriales: Introducción
Control de Procesos Industriales 1. INTRODUCCIÓN por Pascual Campoy Universidad Politécnica Madrid U.P.M.-DISAM P. Campoy Control de Procesos Industriales 1 Control de Procesos Industriales: Introducción
DESARROLLO DE UN ALGORITMO PARA EL CALCULO DE LA DISTANCIA Y POSE DE DOS OBJETIVOS UTILIZANDO UN SISTEMA DE VISIÓN ARTIFICIAL
 DESARROLLO DE UN ALGORITMO PARA EL CALCULO DE LA DISTANCIA Y POSE DE DOS OBJETIVOS UTILIZANDO UN SISTEMA DE VISIÓN ARTIFICIAL Leonardo Gaona Huertas - 20102283013 Oscar Eduardo Rojas Patiño - 20102283013
DESARROLLO DE UN ALGORITMO PARA EL CALCULO DE LA DISTANCIA Y POSE DE DOS OBJETIVOS UTILIZANDO UN SISTEMA DE VISIÓN ARTIFICIAL Leonardo Gaona Huertas - 20102283013 Oscar Eduardo Rojas Patiño - 20102283013
DISEÑO E IMPLEMENTACIÓN DE UN MÓDULO DIDÁCTICO PARA LA MEDICIÓN DEL RITMO CARDÍACO MEDIANTE LA TÉCNICA DE PULSIOMETRÍA
 DISEÑO E IMPLEMENTACIÓN DE UN MÓDULO DIDÁCTICO PARA LA MEDICIÓN DEL RITMO CARDÍACO MEDIANTE LA TÉCNICA DE PULSIOMETRÍA DIRECTOR: ING. FRANKLIN SILVA CODIRECTOR: ING. FABRICIO PÉREZ AUTOR: GALO ANDRADE.
DISEÑO E IMPLEMENTACIÓN DE UN MÓDULO DIDÁCTICO PARA LA MEDICIÓN DEL RITMO CARDÍACO MEDIANTE LA TÉCNICA DE PULSIOMETRÍA DIRECTOR: ING. FRANKLIN SILVA CODIRECTOR: ING. FABRICIO PÉREZ AUTOR: GALO ANDRADE.
TuBot 2014 GUIA DE MONTAJE Y PROGRAMACIÓN MOTORES. Dpto. de Electrónica - Universidad de Alcalá TuBot
 TuBot 2014 GUIA DE MONTAJE Y PROGRAMACIÓN MOTORES Dpto. de Electrónica - Universidad de Alcalá TuBot 2014 1 Conectamos los motores Conecta los conectores de los servos. CUIDADO! Podemos romper los motores.
TuBot 2014 GUIA DE MONTAJE Y PROGRAMACIÓN MOTORES Dpto. de Electrónica - Universidad de Alcalá TuBot 2014 1 Conectamos los motores Conecta los conectores de los servos. CUIDADO! Podemos romper los motores.
ESCUELA SUPERIOR POLITECNICA DEL LITORAL PROGRAMA DE ESTUDIOS 2. OBJETIVOS
 ELECTRÓNICA I UNIDAD ACADÉMICA: CARRERA: ESPECIALIZACIÓN: ÁREA: TIPO DE MATERIA: EJE DE FORMACIÓN: Facultad de Ingeniería en Electricidad y Computación Ingeniería en Electricidad. Ingeniería en Telemática,
ELECTRÓNICA I UNIDAD ACADÉMICA: CARRERA: ESPECIALIZACIÓN: ÁREA: TIPO DE MATERIA: EJE DE FORMACIÓN: Facultad de Ingeniería en Electricidad y Computación Ingeniería en Electricidad. Ingeniería en Telemática,
INGENIERÍA EN ALIMENTOS
 PROBLEMA 1 ESTANDARES A VERIFICAR: II 5; II8; II 9; II 13 Contenido: Balance macroscópico de materia Formación lógico deductiva: modelización de los fenómenos de la naturaleza. Resolución de problemas
PROBLEMA 1 ESTANDARES A VERIFICAR: II 5; II8; II 9; II 13 Contenido: Balance macroscópico de materia Formación lógico deductiva: modelización de los fenómenos de la naturaleza. Resolución de problemas
Clasificación de establecimientos y sedes
 Clasificación de establecimientos y sedes La clasificación se genera después de cada aplicación de SABER 11, es decir, dos veces al año. La clasificación se produce por separado para los grados 11 y 26
Clasificación de establecimientos y sedes La clasificación se genera después de cada aplicación de SABER 11, es decir, dos veces al año. La clasificación se produce por separado para los grados 11 y 26
2. SEÑALES Y SISTEMAS DISCRETOS EN EL TIEMPO. Una señal puede ser definida como una portadora física de información. Por ejemplo,
 2. SEÑALES Y SISTEMAS DISCRETOS EN EL TIEMPO Una señal puede ser definida como una portadora física de información. Por ejemplo, las señales de audio son variaciones en la presión del aire llevando consigo
2. SEÑALES Y SISTEMAS DISCRETOS EN EL TIEMPO Una señal puede ser definida como una portadora física de información. Por ejemplo, las señales de audio son variaciones en la presión del aire llevando consigo
Teoría de Circuitos: amplicadores operacionales
 Teoría de Circuitos: amplicadores operacionales Pablo Monzón Instituto de Ingeniería Eléctrica (IIE) Facultad de Ingeniería-Universidad de la República Uruguay Primer semestre - 2016 Contenido 1 El amplicador
Teoría de Circuitos: amplicadores operacionales Pablo Monzón Instituto de Ingeniería Eléctrica (IIE) Facultad de Ingeniería-Universidad de la República Uruguay Primer semestre - 2016 Contenido 1 El amplicador
Introducción. La muestra
 Página 1 de 9 Informe de satisfacción con los servicios e instalaciones del Recinto de Ponce de la Universidad Interamericana de Puerto Rico para los años 1999 al 21 Introducción Este informe contiene
Página 1 de 9 Informe de satisfacción con los servicios e instalaciones del Recinto de Ponce de la Universidad Interamericana de Puerto Rico para los años 1999 al 21 Introducción Este informe contiene
Capítulo 2 Análisis espectral de señales
 Capítulo 2 Análisis espectral de señales Objetivos 1. Se pretende que el alumno repase las herramientas necesarias para el análisis espectral de señales. 2. Que el alumno comprenda el concepto de espectro
Capítulo 2 Análisis espectral de señales Objetivos 1. Se pretende que el alumno repase las herramientas necesarias para el análisis espectral de señales. 2. Que el alumno comprenda el concepto de espectro
Guía para la instalación de discos duro SATA y Configuración RAID
 Guía para la instalación de discos duro SATA y Configuración RAID 1. Guía para la instalación de discos duro SATA... 2 1.1 Instalación de discos duros serie ATA (SATA)... 2 2. Guía para Configuracións
Guía para la instalación de discos duro SATA y Configuración RAID 1. Guía para la instalación de discos duro SATA... 2 1.1 Instalación de discos duros serie ATA (SATA)... 2 2. Guía para Configuracións
SUPER CONTROLADOR DE SERVOS S310175
 SUPER CONTROLADOR DE SERVOS S310175 Controlador para servos con retroalimentación del par motor No es necesario realizar modificaciones a los servos Características: Sus ocho salidas independientes de
SUPER CONTROLADOR DE SERVOS S310175 Controlador para servos con retroalimentación del par motor No es necesario realizar modificaciones a los servos Características: Sus ocho salidas independientes de
ANEXO 1. CONCEPTOS BÁSICOS. Este anexo contiene información que complementa el entendimiento de la tesis presentada.
 ANEXO 1. CONCEPTOS BÁSICOS Este anexo contiene información que complementa el entendimiento de la tesis presentada. Aquí se exponen técnicas de cálculo que son utilizados en los procedimientos de los modelos
ANEXO 1. CONCEPTOS BÁSICOS Este anexo contiene información que complementa el entendimiento de la tesis presentada. Aquí se exponen técnicas de cálculo que son utilizados en los procedimientos de los modelos
Transistor BJT como Amplificador
 Transistor BJT como Amplificador Lección 05.2 Ing. Jorge Castro-Godínez Escuela de Ingeniería Electrónica Instituto Tecnológico de Costa Rica II Semestre 2013 Jorge Castro-Godínez Transistor BJT como Amplificador
Transistor BJT como Amplificador Lección 05.2 Ing. Jorge Castro-Godínez Escuela de Ingeniería Electrónica Instituto Tecnológico de Costa Rica II Semestre 2013 Jorge Castro-Godínez Transistor BJT como Amplificador
FUNCIÓN DE PRODUCCIÓN LINEAL. La función lineal se caracteriza porque las variables están elevadas a la primera potencia.
 LA FUNCION DE PRODUCCION LINEAL lorenzo castro gómez 1 La función lineal se caracteriza porque las variables están elevadas a la primera potencia. A). Si se tiene un insumo variable: Y = ƒ (X) = a +b 1
LA FUNCION DE PRODUCCION LINEAL lorenzo castro gómez 1 La función lineal se caracteriza porque las variables están elevadas a la primera potencia. A). Si se tiene un insumo variable: Y = ƒ (X) = a +b 1
Nivel: PRIMERO Pre-requisitos: EXAMEN DE INGRESO. Breve reseña de la actividad académica y/o profesional:
 1. DATOS INFORMATIVOS FACULTAD:COMUNICACIÓN, LINGÜÍSTICA Y LITERATURA CARRERA: MULTILINGUE EN NEGOCIOS Y RELACIONES INTERNACIONALES Asignatura: MATEMATICA GENERAL Código:11143 Plan de estudios: C061 Nivel:
1. DATOS INFORMATIVOS FACULTAD:COMUNICACIÓN, LINGÜÍSTICA Y LITERATURA CARRERA: MULTILINGUE EN NEGOCIOS Y RELACIONES INTERNACIONALES Asignatura: MATEMATICA GENERAL Código:11143 Plan de estudios: C061 Nivel:
Diseño de una calculadora
 DEPARTAMENTO DE TECNOLOGÍA ELECTRÓNICA ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA INFORMÁTICA Diseño de una calculadora Sistemas Digitales Avanzados 1. Introducción y objetivos El propósito general de esta
DEPARTAMENTO DE TECNOLOGÍA ELECTRÓNICA ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA INFORMÁTICA Diseño de una calculadora Sistemas Digitales Avanzados 1. Introducción y objetivos El propósito general de esta
ÍNDICE. 1. INTRODUCCION
 ÍNDICE. 1. INTRODUCCION--------------------------------------------------------------------------------------- 1 2. REVISIÓN BIBLIOGRAFICA 2.1 Riego por aspersión-----------------------------------------------------------------------------
ÍNDICE. 1. INTRODUCCION--------------------------------------------------------------------------------------- 1 2. REVISIÓN BIBLIOGRAFICA 2.1 Riego por aspersión-----------------------------------------------------------------------------