Microcontroladores de Atmel
|
|
|
- Ana Isabel Rivero San Martín
- hace 8 años
- Vistas:
Transcripción
1 Microcontroladores de Atmel Familia AVR Ing. Marone José

2 Introducción: Historia Los AVR son una familia de microcontroladores RISC de Atmel. La arquitectura de los AVR fue concebida por dos estudiantes en el Norwegian Institute of Technology, y posteriormente refinada y desarrollada en Atmel Norway, la empresa subsidiaria de Atmel, fundada por los dos arquitectos del chip. El acronimo AVR fue reportado como Advanced Virtual RISC, pero hay rumores de que se debe a sus diseñadores: Alf and Vegard [RISC]. Aunque Atmel dice que no se refiere a nada particular Mas info sobre la arquitectura

3 Introducción: El AVR fue diseñado desde un comienzo para la ejecución eficiente de código C compilado. Por lo tanto, algunas instrucciones tales como 'suma inmediata' ('add immediate' en inglés) faltan, ya que la instrucción 'resta inmediata' ('substract immediate' en inglés) con el complemento dos puede ser usada como alternativa. El set de instrucciones de los AVR es más regular que la de la mayoría de los microcontroladores de 8-bit (por ejemplo, los PIC). Sin embargo, no es completamente ortogonal: Los registros punteros X, Y y Z tienen capacidades de direccionamiento diferentes entre sí. Los registros 0 al 15 tienen diferentes capacidades de direccionamiento que los registros 16 al 31. Las registros de I/O 0 al 31 tienen distintas características que las posiciones 32 al 63. La instrucción CLR afecta los 'flag', mientras que la instrucción SER no lo hace, a pesar de que parecen ser instrucciones complementarias (dejar todos los bits en 1, y dejar todos los bits en 0 respectivamente).

4 Familia AVR La familia de microcontroladores AVR es muy numerosa, incluye 71 dispositivos que comparten el núcleo, pero difieren en recursos. Por ejemplo el atemega8:

5 Arquitectura - Encapsulados

6 CPU (Core) Para maximizar el rendimiento y paralelismo, el AVR usa una arquitectura Harvard con memorias y buses separados para instrucciones y datos. Las instrucciones en la memoria de Programa son ejecutadas con una segmentación de dos etapas. Mientras una instrucción está siendo ejecutada, la siguiente es pre-capturada de la memoria de programa (fetching). El Archivo de Registros contiene 32 registrosde propósito general de 8 bits, habilitados para un acceso rápido. El AVR fue diseñado desde un comienzo para la ejecución eficiente de código C compilado. Por lo tanto, algunas instrucciones tales como 'suma inmediata' ('add immediate' en inglés) faltan, ya que la instrucción 'resta inmediata' ('substract immediate' en inglés) con el complemento dos puede ser usada como alternativa.

7 Arquitectura de la CPU

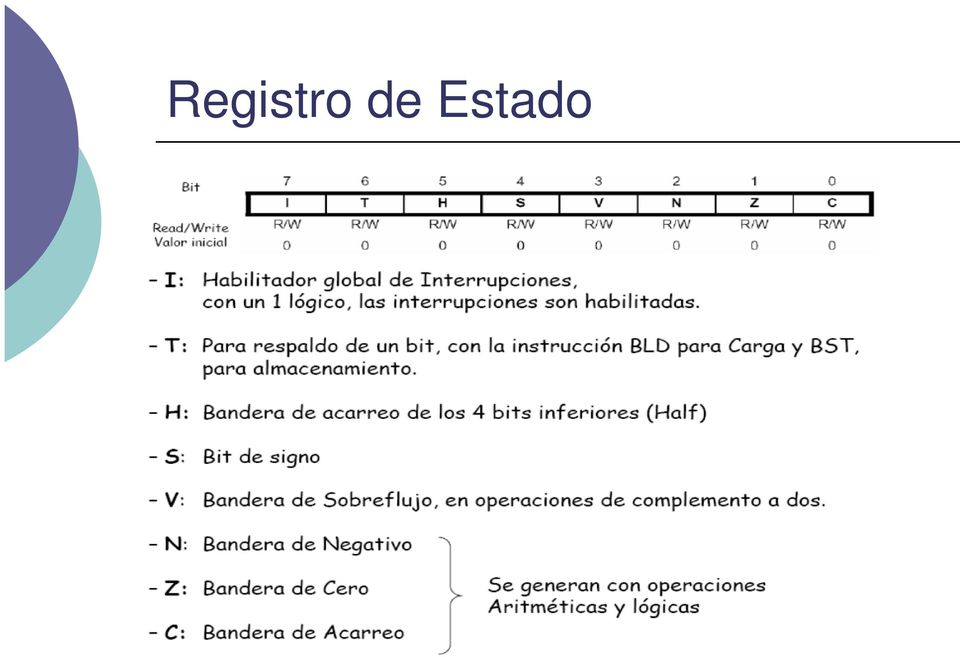
8 CPU (Core) Seis de los 32registros pueden ser usados como apuntadores de 16 bits para direccionamiento indirecto en el espacio de datos, habilitando cálculos de direcciones eficientes. Uno de estos apuntadores también puede usarse como apuntador para tablas de búsqueda (look up tables) en la memoria de programa. Para ello, estos registros se denominan X, Yy Z. Después de una operación aritmética, el registro de Estado (Status Register) es actualizado, para reflejar información acerca de la operación. La mayoría de instrucciones AVR tienen un formato en una palabra de 16-bits. En un ciclode reloj se pueden leer 2 registros que funcionen como operandos para la ALU, que se realice la operación y el resultado quede disponible para escribirse en uno de esos registros.

9 CPU (Core) Para la ejecución, la duración del ciclo es suficiente para permitir la lectura de registros, la operación de la ALU y la escritura en el registro destino.

10 Mapa de Memoria Desde 1 a 256K Toda la memoria de datos se puede direccionar directamente

11 Mapa de Memoria

12 Memoria de programa Espacio continuo de memoria Flash cuyo tamaño varia entre procesadores, para el ATMega 8 es de 8 Kbytes, organizados como 4K x 16 bits. Soporta hasta 10,000 ciclosde escritura/borrado. La memoria se puede particionar en una sección para aplicación y una sección de arranque, donde podría manejarse un cargador para auto programación (Boot Loader Support Read-While- Write Self-programming).

13 Memoria de Programa: (IRQ s) En el espacio de almacenamiento se incluyen a los Vectores de Interrupciones, iniciando en la dirección $000. El número de vectores, en la familia AVR, varia de procesador a procesador, en función de los recursos existentes. Un programa debería iniciar en una ubicación, mas allá de estos vectores. (rjmp Reset)

14 Memoria de dato Es un espacio de 1120 localidades de 8 bits e incluyen: - Un conjunto de 32 localidades (Registros) Registros I / O (Puertos, configuración de recursos, etc) localidades de propósito general. (RAM) Optimizado para el repertorio de instruccione s AVR. Son accedidos mediante las instruccione s INy OUT

15 Memoria de dato (Registros I/O) La arquitectura asegura el estado de los registros luego de un reset. -Mas info en el datasheet OJO!!! Una rutina de atención a interrupciones debe terminar con la instrucciónreti, la cual recupera el valor de la pila para el PC.

16 Memoria de dato (EEPROM) La memoria EEPROM está en un espacio independiente y se requiere del uso de 3 registros I/O para su acceso:

17 Inicialización El ATmega8 tiene cuatro fuentes de Inicialización (Reset) Power-on Reset. El MCU es inicializado cuando el voltaje de la fuente está por abajo del voltaje de umbral de encendido (VPOT). Reset Externo. El MCU es inicializado cuando un nivel bajo está presente en la terminal RESET por un tiempo mayor que la longitud mínima del pulso. Watchdog Reset. El MCU es inicializado cuando el Watchdog Timer está habilitado y su periodo termina. Brown-out Reset. El MCU es inicializado cuando el detector de reducción de voltaje está habilitado y el voltaje VCC de la fuente va por debajo del umbral establecido (VBOT). Una vez que el MCU se recupera de una condición de Reset, espera un tiempo de establecimiento (Tout con un valor típico de 4 ms), antes de recuperar al sistema, para garantizar que los registros tienen su valor inicial.
.")
18 Pila de programa La pila es implementadaen el espacio de propósito general (RAM). Es usada para almacenamiento temporal de variables (instrucciones PUSH y POP) o durante la llamada de subrutinas o el manejo de interrupciones. El registro SPes el apuntador al tope de la pila. Realmente el SP se compone de 2 registros, para la parte alta (SPH) y para la parte baja (SPL), esto para direccionar al espacio completo de memoria. La pila tiene un crecimiento hacia abajo, es decir, de las direcciones altas de memoria a las direcciones bajas. Después de un reset, el apuntador de Pila tiene el valor de 0x0000, por lo que debe ser inicializadodentro del programa (con 0x0460 para ATMega8), para que realice un almacenamiento dentro de un espacio válido.
 y para la parte baja (SPL), esto para direccionar al espacio completo de memoria.")
19 Registro de Estado
20 Puertos de Entrada/Salida Para cada puerto se manejan tres registros, dentro del espacio de registros I/O: Un registro de lectura/escritura sobre un lacth, conectado a la terminal del puerto (PORTx). Un registro de lectura/escritura que define la dirección del puerto (DDRx). Las direcciones pueden configurarse de manera independiente, para cada terminal. 1 Salida 0 Entrada Un registro solo de lectura, para hacer lecturas directas en las terminales de los puertos (PINx). Mucho Cuidado con el señor PINx in RD,PINA

21 Puertos de Entrada/Salida Si en PORTx.n se escribe un 1 lógico cuando la terminal es configurada como entrada, el resistor de pull-upes activado. Para anular al resistor de pull-up, se debe escribir un 0 en PORTx.n o la terminal se debe configurar como salida (suponiendo que el bit PUD tiene 0). Las terminales están en un treestatecuando una condición de reset llega a estar activa, aún si no haya señal de reloj. Si en PORTxn se escribe un uno lógico cuando la terminal se configura como salida, en PINx.n se tendrá un nivel alto. Si se escribe un cero, se tendrá un nivel bajo. Normalmente, el estado con el pull-up habilitado es aceptable, en un ambiente de alta impedancia no se notará la diferencia entre un nivel alto y el pull-up. Si este no es el caso, con el bit PUD del registro SFIOR se pueden deshabilitar los pull-ups en todos los puertos. Ver manual para conmutar entre estados treestate y salida en alto.
22 CLOCK Se tienen diferentes fuentes para manejar al oscilador interno y a la vez, la señales de reloj se distribuyen por los diferentes módulos:
23 Consumo/Modos Sleep Los modos SLEEP habilitan a la aplicación a apagar módulos sin usar en el MCU y por lo tanto, ahorrar energía. El AVR tiene 5 o 6 modos SLEEP y para entrar en alguno de ellos, el bit SE (SLEEP enable) del registro MCUCR (MCU Control Register) debe ponerse en alto. Los bits SM2, SM1 y SM0 de MCUCR determinan el modo:
24 Consumo/Modos Sleep
25 Referencias y a la Práctica. Sitio oficial de Atmel: Página de AVR en Atmel Portales, foros: AVRFreaks Guia AVR Mi recomendado AVRBeginners Preguntarle a pepe que tiene bocha. Desarrollo: Referencias de Wikipedia
INSTITUTO TECNOLÓGICO SUPERIOR DE PÁNUCO APUNTES DE LA MATERIA DE: MICROPROCESADORES Y MICROCONTROLADORES I
 INSTITUTO TECNOLÓGICO SUPERIOR DE PÁNUCO APUNTES DE LA MATERIA DE: MICROPROCESADORES Y MICROCONTROLADORES I DEPARTAMENTO DE INGENIERÍA ELECTRÓNICA ING. FORTINO VÁZQUEZ ELORZA Documento traducido de la
INSTITUTO TECNOLÓGICO SUPERIOR DE PÁNUCO APUNTES DE LA MATERIA DE: MICROPROCESADORES Y MICROCONTROLADORES I DEPARTAMENTO DE INGENIERÍA ELECTRÓNICA ING. FORTINO VÁZQUEZ ELORZA Documento traducido de la
La memoria principal. Los subsistemas de E/S. Los buses del sistema
 GUIA 23: MEMORIA E/S La estructura básica de la mayoría de los ordenadores actuales se representa mediante los siguientes elementos básicos: La Unidad Central de Procesamiento, CPU La memoria principal
GUIA 23: MEMORIA E/S La estructura básica de la mayoría de los ordenadores actuales se representa mediante los siguientes elementos básicos: La Unidad Central de Procesamiento, CPU La memoria principal
Microcontroladores PIC de Microchip: generalidades
 Microcontroladores PIC de Microchip: generalidades PIC significa Peripheral Interface Controller Los fabrica ARIZONA MICROCHIP TECHNOLOGY. Fábrica principal: Chandler (Arizona). Otras en Tender (Arizona),
Microcontroladores PIC de Microchip: generalidades PIC significa Peripheral Interface Controller Los fabrica ARIZONA MICROCHIP TECHNOLOGY. Fábrica principal: Chandler (Arizona). Otras en Tender (Arizona),
Programación y diseño de dispositivos mediante microcontroladores PIC
 Metodología de Programación, Programación en C, Aplicaciones electrónicas 1 / 7 Programación y diseño de dispositivos mediante microcontroladores PIC Hemos elegido el microcontrolador PIC16F84 por las
Metodología de Programación, Programación en C, Aplicaciones electrónicas 1 / 7 Programación y diseño de dispositivos mediante microcontroladores PIC Hemos elegido el microcontrolador PIC16F84 por las
SISTEMAS ELECTRÓNICOS AVANZADOS. ING. TÉC. INDUSTRIAL ELECTRÓNICO
 INTERRUPCIONES Interrumpen la ejecución de un programa y pasan a la rutina de servicio del evento que provoca la interrupción. El vector de interrupción se encuentra en la dirección 04H de la memoria de
INTERRUPCIONES Interrumpen la ejecución de un programa y pasan a la rutina de servicio del evento que provoca la interrupción. El vector de interrupción se encuentra en la dirección 04H de la memoria de
Ensamblador. Interrupciones. Dentro de una computadora existen dos clases de interrupciones:
 Ensamblador Interrupciones Definición: Una interrupción es el rompimiento en la secuencia de un programa para ejecutar un programa especial llamando una rutina de servicio cuya característica principal
Ensamblador Interrupciones Definición: Una interrupción es el rompimiento en la secuencia de un programa para ejecutar un programa especial llamando una rutina de servicio cuya característica principal
Tema 2: Arquitectura del repertorio de instrucciones. Visión del computador que tiene el programador en bajo nivel.
 Tema 2: Arquitectura del repertorio de instrucciones Visión del computador que tiene el programador en bajo nivel. Lo que el programador en lenguaje ensamblador debe conocer para escribir programas: (1)
Tema 2: Arquitectura del repertorio de instrucciones Visión del computador que tiene el programador en bajo nivel. Lo que el programador en lenguaje ensamblador debe conocer para escribir programas: (1)
Procesos. Procesos. Concurrencia de procesos. Qué es un proceso? Estados de un proceso. Modelo de 2 estados. (C) 2008 Mario Medina 1
 2008 Mario Medina 1") Procesos Procesos Mario Medina mariomedina@udec.cl El sistema operativo como administrador de procesos Controla la ejecución de procesos para optimizar criterios Asigna recursos a procesos Facilita sincronización
Procesos Procesos Mario Medina mariomedina@udec.cl El sistema operativo como administrador de procesos Controla la ejecución de procesos para optimizar criterios Asigna recursos a procesos Facilita sincronización
Arquitectura de Computadores
 Arquitectura de Computadores Ricardo.Sanz@upm.es Curso 2004-2005 Arquitectura de Computadores Arquitectura de computadores es la disciplina que estudia la organización y funcionamiento de los computadores
Arquitectura de Computadores Ricardo.Sanz@upm.es Curso 2004-2005 Arquitectura de Computadores Arquitectura de computadores es la disciplina que estudia la organización y funcionamiento de los computadores
Modos de ahorro de energía a en los chips CMOS
 Modos de ahorro de energía a en los chips CMOS MODOS DE OPERACIÓN N DE AHORRO DE ENERGÍA Para aplicaciones donde el consumo de potencia es crítico las versiones CMOS proporcionan modos de operación de
Modos de ahorro de energía a en los chips CMOS MODOS DE OPERACIÓN N DE AHORRO DE ENERGÍA Para aplicaciones donde el consumo de potencia es crítico las versiones CMOS proporcionan modos de operación de
PROBLEMAS DE FUNDAMENTOS DE TECNOLOGÍA DE COMPUTADORES T5. MEMORIAS
 PROBLEMAS DE FUNDAMENTOS DE TECNOLOGÍA DE COMPUTADORES T5. MEMORIAS Tema 5 Memorias Hoja: 2 / 14 Base teórica La memoria es el lugar en el que se almacenan las instrucciones y los datos para que se puedan
PROBLEMAS DE FUNDAMENTOS DE TECNOLOGÍA DE COMPUTADORES T5. MEMORIAS Tema 5 Memorias Hoja: 2 / 14 Base teórica La memoria es el lugar en el que se almacenan las instrucciones y los datos para que se puedan
Autómata Siemens S7-200
 Autómata Siemens S7-200 El autómata S7-200 está constituido por la CPU S7-200 y una serie de módulos de expansión adicionales, hasta un máximo de 7 en el caso de la CPU 224. CPU S7-200 La CPU S7-200 está
Autómata Siemens S7-200 El autómata S7-200 está constituido por la CPU S7-200 y una serie de módulos de expansión adicionales, hasta un máximo de 7 en el caso de la CPU 224. CPU S7-200 La CPU S7-200 está
Universidad Autónoma de Baja California Facultad de Ingeniería Mexicali
 Sumadores En este documento se describe el funcionamiento del circuito integrado 7483, el cual implementa un sumador binario de 4 bits. Adicionalmente, se muestra la manera de conectarlo con otros dispositivos
Sumadores En este documento se describe el funcionamiento del circuito integrado 7483, el cual implementa un sumador binario de 4 bits. Adicionalmente, se muestra la manera de conectarlo con otros dispositivos
Memoria La memoria es la parte del ordenador en la que se guardan o almacenan los programas (las instrucciones y los datos).
.") Memoria La memoria es la parte del ordenador en la que se guardan o almacenan los programas (las instrucciones y los datos). Memoria Típica. Los datos almacenados en memoria tienen que pasar, en un momento
Memoria La memoria es la parte del ordenador en la que se guardan o almacenan los programas (las instrucciones y los datos). Memoria Típica. Los datos almacenados en memoria tienen que pasar, en un momento
Memoria 24LC256 I. I NTRODUCCIÓN
 1 Memoria 24LC256 I. I NTRODUCCIÓN I2C es un bus de comunicación serial sincrónica desarrollado por Phillips Semiconductors a principios de los años 80 s, con la principal intención de interconectar una
1 Memoria 24LC256 I. I NTRODUCCIÓN I2C es un bus de comunicación serial sincrónica desarrollado por Phillips Semiconductors a principios de los años 80 s, con la principal intención de interconectar una
Organización de Computadoras. Turno Recursantes Clase 8
 Organización de Computadoras Turno Recursantes Clase 8 Temas de Clase Subsistema de Memoria Organización de Memoria Principal Notas de clase 8 2 Memoria Velocidad del procesador: se duplica cada 18 meses
Organización de Computadoras Turno Recursantes Clase 8 Temas de Clase Subsistema de Memoria Organización de Memoria Principal Notas de clase 8 2 Memoria Velocidad del procesador: se duplica cada 18 meses
SENSOR DE MOVIMIENTO
 MANUAL DE PRODUCTO SENSOR DE MOVIMIENTO ZN1IO-DETEC Edición 2 Versión 3.1 Índice 1. Introducción... 3 2. Instalación... 4 2.1. Instalación del Sensor de Movimiento... 4 2.2. Descripción de elementos...
MANUAL DE PRODUCTO SENSOR DE MOVIMIENTO ZN1IO-DETEC Edición 2 Versión 3.1 Índice 1. Introducción... 3 2. Instalación... 4 2.1. Instalación del Sensor de Movimiento... 4 2.2. Descripción de elementos...
Tema 2. Diseño del repertorio de instrucciones
 Soluciones a los problemas impares Tema 2. Diseño del repertorio de instrucciones Arquitectura de Computadores Curso 2009-2010 Tema 2: Hoja: 2 / 16 Tema 2: Hoja: 3 / 16 Base teórica Al diseñar un computador,
Soluciones a los problemas impares Tema 2. Diseño del repertorio de instrucciones Arquitectura de Computadores Curso 2009-2010 Tema 2: Hoja: 2 / 16 Tema 2: Hoja: 3 / 16 Base teórica Al diseñar un computador,
Tema 7: Esquema del Funcionamiento de una Computadora. Escuela Politécnica Superior Ingeniería Informática Universidad Autónoma de Madrid
 Tema 7: Esquema del Funcionamiento de una Computadora Ingeniería Informática Universidad Autónoma de Madrid Esquema del Funcionamiento de una Computadora O B J E T I V O S Adquirir los conceptos básicos
Tema 7: Esquema del Funcionamiento de una Computadora Ingeniería Informática Universidad Autónoma de Madrid Esquema del Funcionamiento de una Computadora O B J E T I V O S Adquirir los conceptos básicos
Unidad 1: Conceptos generales de Sistemas Operativos.
 Unidad 1: Conceptos generales de Sistemas Operativos. Tema 2: Estructura de los sistemas de computación. 2.1 Funcionamiento de los sistemas de computación. 2.2 Ejecución de instrucciones e interrupciones
Unidad 1: Conceptos generales de Sistemas Operativos. Tema 2: Estructura de los sistemas de computación. 2.1 Funcionamiento de los sistemas de computación. 2.2 Ejecución de instrucciones e interrupciones
INGENIERIA EN MICROCONTROLADORES. Protocolo RS-485. Introducción
 INGENIERIA EN MICROCONTROLADORES Protocolo RS-485 Introducción P R O T O C O L O R S - 4 8 5 www.i-micro.com Ingeniería en Microcontroladores Teléfono 044 55 11 29 55 05 E-mail: cursos@i-micro.com elp@i-micro.com
INGENIERIA EN MICROCONTROLADORES Protocolo RS-485 Introducción P R O T O C O L O R S - 4 8 5 www.i-micro.com Ingeniería en Microcontroladores Teléfono 044 55 11 29 55 05 E-mail: cursos@i-micro.com elp@i-micro.com
Señal de petición de Interrupción
 Consideren una tarea que require tomar caracteres desde un teclado y mostrarlos en la pantalla de un monitor. La tasa de transferencia desde un teclado a un computador está limitado por la velocidad del
Consideren una tarea que require tomar caracteres desde un teclado y mostrarlos en la pantalla de un monitor. La tasa de transferencia desde un teclado a un computador está limitado por la velocidad del
GUIA GENERAL PARA LA PROGRAMACIÓN DEL SISTEMA PICCITO 16F88 INDICE
 1 GUIA GENERAL PARA LA PROGRAMACIÓN DEL SISTEMA PICCITO 16F88 INDICE 1. Información general sobre el programa Bootloader para el sistema PICCITO 16F88. Auto-programador (Self programming) a través del
1 GUIA GENERAL PARA LA PROGRAMACIÓN DEL SISTEMA PICCITO 16F88 INDICE 1. Información general sobre el programa Bootloader para el sistema PICCITO 16F88. Auto-programador (Self programming) a través del
MICROCONTROLADORES PIC EEPROM. Memoria de programa Características
 EEPROM. Memoria de programa Características Algunos dispositivos pueden leer la memoria de programa. Leer checksums, calibración de datos, tablas. 14-bits de datos comparados con los 8 de retlw 0xnn Accesibles
EEPROM. Memoria de programa Características Algunos dispositivos pueden leer la memoria de programa. Leer checksums, calibración de datos, tablas. 14-bits de datos comparados con los 8 de retlw 0xnn Accesibles
Programación de Microcontroladores
 Programación de Microcontroladores Simulación en Crocodile Technology Práctica Nº 1 Encender un led cuando arranque el microcontrolador. Práctica Nº 2 Encender un led tres veces consecutivas. 1 Práctica
Programación de Microcontroladores Simulación en Crocodile Technology Práctica Nº 1 Encender un led cuando arranque el microcontrolador. Práctica Nº 2 Encender un led tres veces consecutivas. 1 Práctica
Figura 1.4. Elementos que integran a la Tecnología de Información.
 1.5. Organización, estructura y arquitectura de computadoras La Gráfica siguiente muestra la descomposición de la tecnología de información en los elementos que la conforman: Figura 1.4. Elementos que
1.5. Organización, estructura y arquitectura de computadoras La Gráfica siguiente muestra la descomposición de la tecnología de información en los elementos que la conforman: Figura 1.4. Elementos que
Control Digital en PC con MS-DOS
 Control Digital en PC con MS-DOS Abel Alberto Cuadrado Vega 19 de abril de 2006 1. Introducción Un PC puede ser utilizado para realizar un sistema de control digital. Para ello necesita lo siguiente: tarjeta
Control Digital en PC con MS-DOS Abel Alberto Cuadrado Vega 19 de abril de 2006 1. Introducción Un PC puede ser utilizado para realizar un sistema de control digital. Para ello necesita lo siguiente: tarjeta
BUS I2C: IMPLEMENTACIÓN PRÁCTICA CON MICROCONTROLADORES PIC MEMORIAS EEPROM SERIE
 BUS I2C: IMPLEMENTACIÓN PRÁCTICA CON MICROCONTROLADORES PIC MEMORIAS EEPROM SERIE Fernando Nuño García 1 Ventajas del BUS I2C Definido inicialmente a mediados de los 80 para trabajar a 100kbit/s y en 1995
BUS I2C: IMPLEMENTACIÓN PRÁCTICA CON MICROCONTROLADORES PIC MEMORIAS EEPROM SERIE Fernando Nuño García 1 Ventajas del BUS I2C Definido inicialmente a mediados de los 80 para trabajar a 100kbit/s y en 1995
Qué es un Microcontrolador?
 Curso de Microcontroladores Qué es un Microcontrolador? Al igual que la mayoría de las computadoras, los microcontroladores son simples ejecutores de instrucciones de propósito general. La verdadera estrella
Curso de Microcontroladores Qué es un Microcontrolador? Al igual que la mayoría de las computadoras, los microcontroladores son simples ejecutores de instrucciones de propósito general. La verdadera estrella
UNIDADES FUNCIONALES DEL ORDENADOR TEMA 3
 UNIDADES FUNCIONALES DEL ORDENADOR TEMA 3 INTRODUCCIÓN El elemento hardware de un sistema básico de proceso de datos se puede estructurar en tres partes claramente diferenciadas en cuanto a sus funciones:
UNIDADES FUNCIONALES DEL ORDENADOR TEMA 3 INTRODUCCIÓN El elemento hardware de un sistema básico de proceso de datos se puede estructurar en tres partes claramente diferenciadas en cuanto a sus funciones:
Curso sobre Microcontroladores Familia HC9S08 de Freescale
 Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: info@edudevices.com.ar Capítulo 8.- Inter Integrated Circuit Interface I2C MMIIC
Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: info@edudevices.com.ar Capítulo 8.- Inter Integrated Circuit Interface I2C MMIIC
RB7/PGD RB6/PGC RB5 RB4 RB3/PGM RB2. RB1 RB0/INT VDD Vss RD7/PSP7 RD6/PSP6 RD5/PSP5 RD4/PSP4 RC7/RX/DT RC6/TX/CK RC5/SD0 RC4/SDI/SDA RD3/PSP3 RD2/PSP2
 LOS PIC16F87X Características Generales D. de B L O Q U E S 1 D. de B L O Q U E S D. de B L O Q U E S 2 Características (1) Procesador de arquitectura RISC avanzada Juego de solo 35 instrucciones con 14
LOS PIC16F87X Características Generales D. de B L O Q U E S 1 D. de B L O Q U E S D. de B L O Q U E S 2 Características (1) Procesador de arquitectura RISC avanzada Juego de solo 35 instrucciones con 14
GUIA GENERAL PARA LA PROGRAMACIÓN DEL SISTEMA EB88 BOOTLOADER: TINY INDICE
 1 GUIA GENERAL PARA LA PROGRAMACIÓN DEL SISTEMA EB88 BOOTLOADER: TINY INDICE 1. Información general sobre el programa Bootloader para el sistema EB88. Auto-programador (Self programming) a través del puerto
1 GUIA GENERAL PARA LA PROGRAMACIÓN DEL SISTEMA EB88 BOOTLOADER: TINY INDICE 1. Información general sobre el programa Bootloader para el sistema EB88. Auto-programador (Self programming) a través del puerto
Capitulo V Administración de memoria
 Capitulo V Administración de memoria Introducción. Una de las tareas más importantes y complejas de un sistema operativo es la gestión de memoria. La gestión de memoria implica tratar la memoria principal
Capitulo V Administración de memoria Introducción. Una de las tareas más importantes y complejas de un sistema operativo es la gestión de memoria. La gestión de memoria implica tratar la memoria principal
BUS I2C. IES Los Viveros Sevilla Dpto. Electrónica. 1
 BUS I2C Se trata de un protocolo serie desarrollado por Philips Semiconductors usado por muchos integrados para comunicarse entre ellos, para su funcionamiento requiere sólo dos líneas, una de reloj (SCL)
BUS I2C Se trata de un protocolo serie desarrollado por Philips Semiconductors usado por muchos integrados para comunicarse entre ellos, para su funcionamiento requiere sólo dos líneas, una de reloj (SCL)
Clase 20: Arquitectura Von Neuman
 http://computacion.cs.cinvestav.mx/~efranco @efranco_escom efranco.docencia@gmail.com Estructuras de datos (Prof. Edgardo A. Franco) 1 Contenido Arquitectura de una computadora Elementos básicos de una
http://computacion.cs.cinvestav.mx/~efranco @efranco_escom efranco.docencia@gmail.com Estructuras de datos (Prof. Edgardo A. Franco) 1 Contenido Arquitectura de una computadora Elementos básicos de una
Microchip Tips & Tricks...
 ARTICULO TECNICO Microchip Tips & Tricks... Por el Departamento de Ingeniería de EduDevices. Soluciones y Diseños de Fuentes Inteligentes. Introducción: Microchip continúa presentando uana serie de productos
ARTICULO TECNICO Microchip Tips & Tricks... Por el Departamento de Ingeniería de EduDevices. Soluciones y Diseños de Fuentes Inteligentes. Introducción: Microchip continúa presentando uana serie de productos
MODELO: 301 RESPALDO DE TARJETA SIM
 MODELO: 301 RESPALDO DE TARJETA SIM Con establecimiento de password y visión de la agenda telefónica MANUAL DE OPERACIÓN INTRODUCCION El modelo 301 es uno de nuestros nuevos dispositivos para respaldar
MODELO: 301 RESPALDO DE TARJETA SIM Con establecimiento de password y visión de la agenda telefónica MANUAL DE OPERACIÓN INTRODUCCION El modelo 301 es uno de nuestros nuevos dispositivos para respaldar
DISCOS RIGIDOS. Forman el principal elemento de la memoria secundaria de un ordenador, llamada así en oposición a la memoria principal o memoria RAM
 DISCOS RIGIDOS Es un hardware de almacenamiento permanente su función en la PC consiste en guardar los archivos de instalación del sistema operativo y datos del usuario. Forman el principal elemento de
DISCOS RIGIDOS Es un hardware de almacenamiento permanente su función en la PC consiste en guardar los archivos de instalación del sistema operativo y datos del usuario. Forman el principal elemento de
ACTIVIDADES TEMA 1. EL LENGUAJE DE LOS ORDENADORES. 4º E.S.O- SOLUCIONES.
 1.- a) Explica qué es un bit de información. Qué es el lenguaje binario? Bit es la abreviatura de Binary digit. (Dígito binario). Un bit es un dígito del lenguaje binario que es el lenguaje universal usado
1.- a) Explica qué es un bit de información. Qué es el lenguaje binario? Bit es la abreviatura de Binary digit. (Dígito binario). Un bit es un dígito del lenguaje binario que es el lenguaje universal usado
Análisis general de un Microprocesador
 Análisis general de un Microprocesador Arquitectura del chip Repertorio de instrucciones Sistema mínimo Señales de control Función de cada pin del µp Herramientas de desarrollo Performance. ARQUITECTURA
Análisis general de un Microprocesador Arquitectura del chip Repertorio de instrucciones Sistema mínimo Señales de control Función de cada pin del µp Herramientas de desarrollo Performance. ARQUITECTURA
2.1 Funcionamiento del MPLS
 Capítulo 2 MPLS Básico En este capítulo se va a hablar sobre el funcionamiento de las redes MPLS para su mayor comprensión. Se habla sobre la red MPLS en general y las versatilidades que este tiene. También
Capítulo 2 MPLS Básico En este capítulo se va a hablar sobre el funcionamiento de las redes MPLS para su mayor comprensión. Se habla sobre la red MPLS en general y las versatilidades que este tiene. También
Requerimientos Principales de un Sistema Operativo. Descripción y Control de Procesos. Proceso
 Requerimientos Principales de un Sistema Operativo Descripción y Control de Procesos Capítulo 3 Entrelazar la ejecución de varios procesos para maximizar el uso del procesador a la vez que se mantiene
Requerimientos Principales de un Sistema Operativo Descripción y Control de Procesos Capítulo 3 Entrelazar la ejecución de varios procesos para maximizar el uso del procesador a la vez que se mantiene
Curso sobre Microcontroladores Familia HC9S08 de Freescale
 Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: info@edudevices.com.ar Responsable Area Educación ELKO / ARROW www.elkonet.com
Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: info@edudevices.com.ar Responsable Area Educación ELKO / ARROW www.elkonet.com
Tema 5 Repertorios de instrucciones: Modos de direccionamiento y formato
 Tema 5 Repertorios de instrucciones: Modos de direccionamiento y formato Bibliografía: William Stallings Organización y Arquitectura de computadores 5ta. Edition. Editorial Pearson Educación.- Objetivos:
Tema 5 Repertorios de instrucciones: Modos de direccionamiento y formato Bibliografía: William Stallings Organización y Arquitectura de computadores 5ta. Edition. Editorial Pearson Educación.- Objetivos:
Proyecto final Diseño de un circuito secuencial. utilizando un contador binario de cuatro bits
 Instituto tecnológico de Oaxaca Electrónica digital II ECC047 Proyecto final Diseño de un circuito secuencial utilizando un contador binario de cuatro bits Catedrático: Alumno: Rodríguez Calvo Enrique
Instituto tecnológico de Oaxaca Electrónica digital II ECC047 Proyecto final Diseño de un circuito secuencial utilizando un contador binario de cuatro bits Catedrático: Alumno: Rodríguez Calvo Enrique
REQUISITOS MÍNIMOS RECOMENDADOS para Windows 7
 Manual de Instalación de Windows 7 Windows 7 Es la nueva versión del sistema operativo Windows, esta nueva versión trae cientos de nuevas mejoras, tiene rápida capacidad de respuesta y se ejecuta de manera
Manual de Instalación de Windows 7 Windows 7 Es la nueva versión del sistema operativo Windows, esta nueva versión trae cientos de nuevas mejoras, tiene rápida capacidad de respuesta y se ejecuta de manera
INTRODUCCIÓN. Definiciones ORDENADOR (RAE 1992): En esta asignatura computador y ordenador tiene el mismo significado
: En esta asignatura computador y ordenador tiene el mismo significado") INTRODUCCIÓN UPCO ICAI Departamento de Electrónica y Automática 1 Definiciones ORDENADOR (RAE 1992): Máquina electrónica dotada de una memoria de gran capacidad y de métodos de tratamiento de la información,
INTRODUCCIÓN UPCO ICAI Departamento de Electrónica y Automática 1 Definiciones ORDENADOR (RAE 1992): Máquina electrónica dotada de una memoria de gran capacidad y de métodos de tratamiento de la información,
PROYECTO MASI MODELO DE ADMINISTRACIÓN DEL SISTEMA IMPOSITIVO
 MODELO DE ADMINISTRACIÓN DEL SISTEMA IMPOSITIVO MANUAL DE USUARIO FACILITO Módulo: Núcleo Fecha: 10/03/2015 Versión: 2.0 Revisiones Registro de Cambios Fecha Autor Version Referencia del Cambio Revisores
MODELO DE ADMINISTRACIÓN DEL SISTEMA IMPOSITIVO MANUAL DE USUARIO FACILITO Módulo: Núcleo Fecha: 10/03/2015 Versión: 2.0 Revisiones Registro de Cambios Fecha Autor Version Referencia del Cambio Revisores
3.8 Construcción de una ALU básica
 3.8 Construcción de una ALU básica En este punto veremos como por medio de compuertas lógicas y multiplexores, se pueden implementar las operaciones aritméticas básicas de una ALU. Esencialmente en este
3.8 Construcción de una ALU básica En este punto veremos como por medio de compuertas lógicas y multiplexores, se pueden implementar las operaciones aritméticas básicas de una ALU. Esencialmente en este
DESARROLLO DE UN COLECTOR DE DATOS PORTÁTIL
 DESARROLLO DE UN COLECTOR DE DATOS PORTÁTIL H. Nelson Acosta, Marcelo A. Tosini y José A. Marone { nacosta, mtosini, jmarone }@exa.unicen.edu.ar Facultad de Ciencias Exactas UNICEN / Redimec S.R.L. Tandil
DESARROLLO DE UN COLECTOR DE DATOS PORTÁTIL H. Nelson Acosta, Marcelo A. Tosini y José A. Marone { nacosta, mtosini, jmarone }@exa.unicen.edu.ar Facultad de Ciencias Exactas UNICEN / Redimec S.R.L. Tandil
Entrada/Salida. Polling e Interrupciones. Verano de 2011. Mariano Moscato. Organización del Computador 1
 Entrada/Salida Polling e Interrupciones Mariano Moscato Organización del Computador 1 Verano de 2011 El GuidoBot Robot docente Basado en tecnología ORGA1 tiene un procesador y una memoria ORGA1 Sus dispositivos
Entrada/Salida Polling e Interrupciones Mariano Moscato Organización del Computador 1 Verano de 2011 El GuidoBot Robot docente Basado en tecnología ORGA1 tiene un procesador y una memoria ORGA1 Sus dispositivos
Pipelining o Segmentación de Instrucciones
 Pipelining o Segmentación de Instrucciones La segmentación de instrucciones es similar al uso de una cadena de montaje en una fábrica de manufacturación. En las cadenas de montaje, el producto pasa a través
Pipelining o Segmentación de Instrucciones La segmentación de instrucciones es similar al uso de una cadena de montaje en una fábrica de manufacturación. En las cadenas de montaje, el producto pasa a través
Maqueta: Osciloscopio y generador
 Maqueta: Osciloscopio y generador 1. Introducción Esta práctica se divide en dos partes. En la primera se desarrolla un osciloscopio digital basado en el ADC del 80C537 y la pantalla del PC. En la segunda
Maqueta: Osciloscopio y generador 1. Introducción Esta práctica se divide en dos partes. En la primera se desarrolla un osciloscopio digital basado en el ADC del 80C537 y la pantalla del PC. En la segunda
En el presente capítulo se describe la programación del instrumento virtual y cómo
 Capítulo 6. Instrumentación virtual En el presente capítulo se describe la programación del instrumento virtual y cómo éste controla el circuito de captura de señales, la llamada telefónica y escribe los
Capítulo 6. Instrumentación virtual En el presente capítulo se describe la programación del instrumento virtual y cómo éste controla el circuito de captura de señales, la llamada telefónica y escribe los
Guía de práctica. Dispositivo
 Guía de práctica Que queremos hacer? Vamos a hacer el Hello World del mundo de la electrónica que no es más que prender y apagar un LED a intervalos regulares. PROYECTO LAPEGÜE 1 = Prende Dispositivo 0
Guía de práctica Que queremos hacer? Vamos a hacer el Hello World del mundo de la electrónica que no es más que prender y apagar un LED a intervalos regulares. PROYECTO LAPEGÜE 1 = Prende Dispositivo 0
Se encarga de realizar las funciones básicas de manejo y configuración del ordenador. La BIOS tiene más tareas fundamentales: Chequearse a sí misma.
 La BIOS, siglas de su nombre en inglés Basic Input-Output System, también conocida como Sistema Básico de Entrada / Salida, es básicamente un código de software que permite iniciar el sistema operativo
La BIOS, siglas de su nombre en inglés Basic Input-Output System, también conocida como Sistema Básico de Entrada / Salida, es básicamente un código de software que permite iniciar el sistema operativo
Lo que definimos como CPU (Central Process Unit) o Unidad Central de Proceso, está estructurado por tres unidades operativamente diferentes:
 o Unidad Central de Proceso, está estructurado por tres unidades operativamente diferentes:") Facultad de Ciencias Exactas y Naturales y Agrimensura Departamento de Ingeniería Cátedra : Proyecto Final Apuntes : Microprocesadores Tema 6-1 : Esquema de un µp. La CPU Lo que definimos como CPU (Central
Facultad de Ciencias Exactas y Naturales y Agrimensura Departamento de Ingeniería Cátedra : Proyecto Final Apuntes : Microprocesadores Tema 6-1 : Esquema de un µp. La CPU Lo que definimos como CPU (Central
SALIDAS ANALÓGICAS. Adquisición de datos y acondicionamiento de la señal Tema 6
 SALIDAS ANALÓGICAS A. Arquitectura de la salida analógica B. Uso del DAQmx Write VI C. VI, AO Multipuntos (Buffered) D. Generación del Buffer Finito E. Generación del Buffer Continuo Página 1 de 8 A. ARQUITECTURA
SALIDAS ANALÓGICAS A. Arquitectura de la salida analógica B. Uso del DAQmx Write VI C. VI, AO Multipuntos (Buffered) D. Generación del Buffer Finito E. Generación del Buffer Continuo Página 1 de 8 A. ARQUITECTURA
Servicios de Formación:
 Servicios de Formación: GEDILEC Y BBDD Proceso de Realización Inventario Pintor Tapiró, 22 08028 BARCELONA Telf.: 93 4400405 Fax: 93 4401104 Es habitual que en las empresas se realice a final de año un
Servicios de Formación: GEDILEC Y BBDD Proceso de Realización Inventario Pintor Tapiró, 22 08028 BARCELONA Telf.: 93 4400405 Fax: 93 4401104 Es habitual que en las empresas se realice a final de año un
HP Backup and Recovery Manager
 HP Backup and Recovery Manager Manual de usuario Version 1.0 Índice Introducción Instalación Cómo se instala Opciones de idioma HP Backup and Recovery Manager Recordatorios Copias de sguridad programadas
HP Backup and Recovery Manager Manual de usuario Version 1.0 Índice Introducción Instalación Cómo se instala Opciones de idioma HP Backup and Recovery Manager Recordatorios Copias de sguridad programadas
Departamento técnico. Guía rápida CC-LINK. Autómatas serie Q con variadores FR-E 1 / 33
 1 Posibilidades de la red CC_Link...2 2 Cableado tarjetas CC_Link...3 2.1 Distancias...3 2.2 Características del cable...4 2.3 Conexionado del cable en los bornes...5 3 Configuración tarjeta variadores
1 Posibilidades de la red CC_Link...2 2 Cableado tarjetas CC_Link...3 2.1 Distancias...3 2.2 Características del cable...4 2.3 Conexionado del cable en los bornes...5 3 Configuración tarjeta variadores
DESCRIPCION DEL SITEMA MASTER.
 DESCRIPCION DEL SITEMA MASTER. ESTRUCTURA. El sistema MASTER (Sistema Modular para Control Adaptativo en Tiempo Real) se ha implementado en base a un computador compatible PC-AT, dotado de una tarjeta
DESCRIPCION DEL SITEMA MASTER. ESTRUCTURA. El sistema MASTER (Sistema Modular para Control Adaptativo en Tiempo Real) se ha implementado en base a un computador compatible PC-AT, dotado de una tarjeta
PSI Gestión es un sistema multiusuario que le permite 2 tipos de configuraciones:
 CARACTERISTICAS DEL SISTEMA PSI Gestión es un sistema multiusuario que le permite 2 tipos de configuraciones: Sólo Servidor: Una sola computadora con el sistema instalado en modo Administrador. Pueden
CARACTERISTICAS DEL SISTEMA PSI Gestión es un sistema multiusuario que le permite 2 tipos de configuraciones: Sólo Servidor: Una sola computadora con el sistema instalado en modo Administrador. Pueden
TEMA 20.0. EL BUS I 2 C (Inter Integrated Circuit Bus) I2C EN C
 I2C EN C") TEMA 20.0 EL BUS I 2 C (Inter Integrated Circuit Bus) I2C EN C La comunicación n serie en los PIC 16F87X Los microcontroladores PIC de la familia 16F78x, tienen la posibilidad de comunicación serie, las
TEMA 20.0 EL BUS I 2 C (Inter Integrated Circuit Bus) I2C EN C La comunicación n serie en los PIC 16F87X Los microcontroladores PIC de la familia 16F78x, tienen la posibilidad de comunicación serie, las
Configuración de la dirección IP del dispositivo de autenticación de Xerox Secure Access Unified ID System Libro blanco
 Configuración de la dirección IP del dispositivo de autenticación de Xerox Secure Access Unified ID System Copyright 2007 por Xerox Corporation. Reservados todos los derechos. XEROX y Secure Access Unified
Configuración de la dirección IP del dispositivo de autenticación de Xerox Secure Access Unified ID System Copyright 2007 por Xerox Corporation. Reservados todos los derechos. XEROX y Secure Access Unified
COMPONENTES INTERNOS DE UN ROUTER CISCO 1900 JESUS DAVID SIERRA ARANGO INSTRUCTOR JUAN DAVID LONDOÑO MARTINEZ
 COMPONENTES INTERNOS DE UN ROUTER CISCO 1900 JESUS DAVID SIERRA ARANGO INSTRUCTOR JUAN DAVID LONDOÑO MARTINEZ CENTRO DE SERVICIOS Y GESTIÓN EMPRESARIAL TECNOLOGÍA EN GESTIÓN DE REDES DE DATOS INTRODUCCION
COMPONENTES INTERNOS DE UN ROUTER CISCO 1900 JESUS DAVID SIERRA ARANGO INSTRUCTOR JUAN DAVID LONDOÑO MARTINEZ CENTRO DE SERVICIOS Y GESTIÓN EMPRESARIAL TECNOLOGÍA EN GESTIÓN DE REDES DE DATOS INTRODUCCION
Mis claves. Manual de usuario. versión 1.1. Pertusoft 21/12/2011. www.pertusoft.com
 Manual de usuario Pertusoft 21/12/2011 www.pertusoft.com Índice 1. Iniciar la aplicación por primera vez... 2 2. Acceso a la aplicación... 2 3. Estructura y organización de datos... 3 3.1 - Categorías...
Manual de usuario Pertusoft 21/12/2011 www.pertusoft.com Índice 1. Iniciar la aplicación por primera vez... 2 2. Acceso a la aplicación... 2 3. Estructura y organización de datos... 3 3.1 - Categorías...
Instalación de Sistema Operativo Mac OsX Lion en VirtualBox.
 Instalación de Sistema Operativo Mac OsX Lion en VirtualBox. Vamos a proceder a explicar la instalación de un sistema operativo de apple, más concretamente, el cual deberemos descargarnos una imagen del
Instalación de Sistema Operativo Mac OsX Lion en VirtualBox. Vamos a proceder a explicar la instalación de un sistema operativo de apple, más concretamente, el cual deberemos descargarnos una imagen del
ESPAÑOL BLACK-VS. Guía de uso e instalación
 ESPAÑOL BLACK-VS Guía de uso e instalación ÍNDICE 1 INTRODUCCIÓN... 2 2 INSTALACIÓN Y PUESTA EN MARCHA... 2 3 REGISTRO DE LA APLICACIÓN... 4 4 CONFIGURACIÓN DE LAS CONEXIONES... 6 5 CONEXIÓN... 9 5.1
ESPAÑOL BLACK-VS Guía de uso e instalación ÍNDICE 1 INTRODUCCIÓN... 2 2 INSTALACIÓN Y PUESTA EN MARCHA... 2 3 REGISTRO DE LA APLICACIÓN... 4 4 CONFIGURACIÓN DE LAS CONEXIONES... 6 5 CONEXIÓN... 9 5.1
MANUAL COPIAS DE SEGURIDAD
 MANUAL COPIAS DE SEGURIDAD Índice de contenido Ventajas del nuevo sistema de copia de seguridad...2 Actualización de la configuración...2 Pantalla de configuración...3 Configuración de las rutas...4 Carpeta
MANUAL COPIAS DE SEGURIDAD Índice de contenido Ventajas del nuevo sistema de copia de seguridad...2 Actualización de la configuración...2 Pantalla de configuración...3 Configuración de las rutas...4 Carpeta
Curso sobre Microcontroladores Familia HC9S08 de Freescale
 Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: info@edudevices.com.ar Capítulo 6.- Módulo Serial Asincrónico de Comunicación
Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: info@edudevices.com.ar Capítulo 6.- Módulo Serial Asincrónico de Comunicación
Redes I Clase # 3. Licda. Consuelo E. Sandoval
 Redes I Clase # 3 Licda. Consuelo E. Sandoval 1. PROCESAMIENTO CENTRALIZADO El proceso centralizado es utilizado en los Mainframes, Minicomputadoras y en las Micro multiusuario. Los enlaces a estas máquinas
Redes I Clase # 3 Licda. Consuelo E. Sandoval 1. PROCESAMIENTO CENTRALIZADO El proceso centralizado es utilizado en los Mainframes, Minicomputadoras y en las Micro multiusuario. Los enlaces a estas máquinas
Winide y Kit EVALQTY CDM 2011
 Winide y Kit EVALQTY CDM 2011 Seteo de jumpers jumpers JUMPER : JP1 Selección de la Tensión de Alimentación al MCU. JP1 en posición 1-2 VDD = 5Vdc JP1 en posición 2-3 VDD = 3Vdc (MCU alimentado con 3Vdc)
Winide y Kit EVALQTY CDM 2011 Seteo de jumpers jumpers JUMPER : JP1 Selección de la Tensión de Alimentación al MCU. JP1 en posición 1-2 VDD = 5Vdc JP1 en posición 2-3 VDD = 3Vdc (MCU alimentado con 3Vdc)
Como sacarle mayor provecho a las herramientas disponibles para la familia HC908
 COMENTARIO TECNICO Hablemos de MCU s... Por Ing. Daniel Di Lella Dedicated Field Application Engineer Responsable Area Educación Elko / Arrow www.elkonet.com ddilella@elkonet.com dilella@arnet.com.ar Como
COMENTARIO TECNICO Hablemos de MCU s... Por Ing. Daniel Di Lella Dedicated Field Application Engineer Responsable Area Educación Elko / Arrow www.elkonet.com ddilella@elkonet.com dilella@arnet.com.ar Como
Guía para El Proveedor **********
 Este es un sistema completamente nuevo, que esta implementado la OPS. Aún hay mejoras que realizar, en las secciones que tienen que estar en español. Esperamos poder tener todo actualizado muy pronto.
Este es un sistema completamente nuevo, que esta implementado la OPS. Aún hay mejoras que realizar, en las secciones que tienen que estar en español. Esperamos poder tener todo actualizado muy pronto.
10 En este caso indica la dirección GPIB del instrumento.
 Práctica: Manejo de intrumentos a tavés del bus GPIB. Utilización de drivers de instrumentos, funciones básicas GPIB. Utilización de sesiones VISA (Virtual Instrument Software Architecture). En esta práctiva
Práctica: Manejo de intrumentos a tavés del bus GPIB. Utilización de drivers de instrumentos, funciones básicas GPIB. Utilización de sesiones VISA (Virtual Instrument Software Architecture). En esta práctiva
UNIDAD 4: El procesador: Camino de los datos y Control.
 UNIDAD 4: El procesador: Camino de los datos y Control. 4.1 Introducción El rendimiento de una máquina depende de tres factores clave: Conteo de Instrucciones, tiempo del ciclo de reloj y ciclos de reloj
UNIDAD 4: El procesador: Camino de los datos y Control. 4.1 Introducción El rendimiento de una máquina depende de tres factores clave: Conteo de Instrucciones, tiempo del ciclo de reloj y ciclos de reloj
 Los Microprocesadores MIA José Rafael Rojano Cáceres Arquitectura de Computadoras I Evolución Histórica de los Microprocesadores Intel Evolución de los microprocesadores Intel de la década de los 70 4004
Los Microprocesadores MIA José Rafael Rojano Cáceres Arquitectura de Computadoras I Evolución Histórica de los Microprocesadores Intel Evolución de los microprocesadores Intel de la década de los 70 4004
Actividad N 1. Primer procesador creado por Intel
 Actividad N 1 Primer procesador creado por Intel El Intel 4004 (i4004), un CPU de 4bits, fue el primer microprocesador en un simple chip, así como el primero disponible comercialmente. Aproximadamente
Actividad N 1 Primer procesador creado por Intel El Intel 4004 (i4004), un CPU de 4bits, fue el primer microprocesador en un simple chip, así como el primero disponible comercialmente. Aproximadamente
RESERVACIONES ONLINE MANUAL DE REFERENCIA
 MÓDULO RESERVACIONES ONLINE Versión 3.0 MANUAL DE REFERENCIA National Soft de México INDICE GENERAL 1. INTRODUCCIÓN... 4 1.1. ANTES DE COMENZAR... 4 2. REGISTRO AL SERVICIO... 5 2.1. CREACIÓN DE SU CUENTA
MÓDULO RESERVACIONES ONLINE Versión 3.0 MANUAL DE REFERENCIA National Soft de México INDICE GENERAL 1. INTRODUCCIÓN... 4 1.1. ANTES DE COMENZAR... 4 2. REGISTRO AL SERVICIO... 5 2.1. CREACIÓN DE SU CUENTA
Paquete de regulación solar KNX, de RTS
 Paquete de regulación solar KNX, de RTS CONTENIDO DEL PAQUETE Se trata de un paquete especial para realizar la regulación en una instalación de placas solares térmicas (Ej.: para ACS) que contiene 2 sensores
Paquete de regulación solar KNX, de RTS CONTENIDO DEL PAQUETE Se trata de un paquete especial para realizar la regulación en una instalación de placas solares térmicas (Ej.: para ACS) que contiene 2 sensores
UNIVERSIDAD TECNICA FEDERICO SANTA MARIA DEPARTAMENTO DE ELECTRONICA Diseño con Microcontroladores
 WATCHDOG TIMER El watchdog timer es un temporizador de 16 bit que puede ser usado como watchdog o por intervalos de tiempo. Al iniciarse un programa, el watchdog timer está activo y configurado por defecto
WATCHDOG TIMER El watchdog timer es un temporizador de 16 bit que puede ser usado como watchdog o por intervalos de tiempo. Al iniciarse un programa, el watchdog timer está activo y configurado por defecto
Informática I Notas del curso
 EXCEL Objetivo: Identificar la funcionalidad general de Excel, sus herramientas y recursos Excel Objetivo Particular: Conocer los métodos básicos de trabajo de Excel, para el manejo de registros, datos
EXCEL Objetivo: Identificar la funcionalidad general de Excel, sus herramientas y recursos Excel Objetivo Particular: Conocer los métodos básicos de trabajo de Excel, para el manejo de registros, datos
Hilos, comunicación y competencia entre procesos. Dr. Alonso Ramírez Manzanares 2-Sep-2010
 Hilos, comunicación y competencia entre procesos Dr. Alonso Ramírez Manzanares 2-Sep-2010 Implementación de procesos Se mantiene una tabla de procesos con una entrada por cada proceso: Con lo cual tenemos
Hilos, comunicación y competencia entre procesos Dr. Alonso Ramírez Manzanares 2-Sep-2010 Implementación de procesos Se mantiene una tabla de procesos con una entrada por cada proceso: Con lo cual tenemos
Estructura y Tecnología de Computadores (ITIG) Luis Rincón Córcoles Ángel Serrano Sánchez de León
 Luis Rincón Córcoles Ángel Serrano Sánchez de León") Estructura y Tecnología de Computadores (ITIG) Luis Rincón Córcoles Ángel Serrano Sánchez de León Programa. Introducción. 2. Elementos de almacenamiento. 3. Elementos de proceso. 4. Elementos de interconexión.
Estructura y Tecnología de Computadores (ITIG) Luis Rincón Córcoles Ángel Serrano Sánchez de León Programa. Introducción. 2. Elementos de almacenamiento. 3. Elementos de proceso. 4. Elementos de interconexión.
Instrucciones de Instalación
 knfbreader Mobile kreader Mobile Instrucciones de Instalación Copyright 2009 knfbreading Technology, Inc. www.knfbreader.eu Todos los derechos reservados. Otros nombres de productos o empresas mencionados
knfbreader Mobile kreader Mobile Instrucciones de Instalación Copyright 2009 knfbreading Technology, Inc. www.knfbreader.eu Todos los derechos reservados. Otros nombres de productos o empresas mencionados
ENTORNO DE TRABAJO PARA LA SIMULACIÓN HARDWARE DE UNA COMPUTADORA SENCILLA
 ENTORNO DE TRABAJO PARA LA SIMULACIÓN HARDWARE DE UNA COMPUTADORA SENCILLA Fco. Javier Quiles, Manuel A. Ortiz, Carlos D. Moreno, J. Ignacio Benavides, Vicente J. Fernández, Nicolás Martínez Área de Conocimiento
ENTORNO DE TRABAJO PARA LA SIMULACIÓN HARDWARE DE UNA COMPUTADORA SENCILLA Fco. Javier Quiles, Manuel A. Ortiz, Carlos D. Moreno, J. Ignacio Benavides, Vicente J. Fernández, Nicolás Martínez Área de Conocimiento
Manual IOCard USB DimControl. Fecha:19/08/15 Rev.:1.1
 . Fecha:19/08/15 Rev.:1.1 Índice: MANUAL IOCARD USB DIMCONTROL... 1 ÍNDICE:... 2 INTRODUCCIÓN:... 3 USB DIMCONTROL:... 3 ESQUEMA:... 3 DESCRIPCIÓN DE LOS CONECTORES:... 4 Conector J7 a pedestal:... 4 FUNCIONAMIENTO
. Fecha:19/08/15 Rev.:1.1 Índice: MANUAL IOCARD USB DIMCONTROL... 1 ÍNDICE:... 2 INTRODUCCIÓN:... 3 USB DIMCONTROL:... 3 ESQUEMA:... 3 DESCRIPCIÓN DE LOS CONECTORES:... 4 Conector J7 a pedestal:... 4 FUNCIONAMIENTO
PUERTOS DE ENTRADA Y SALIDA
 PUERTOS DE ENTRADA Y SALIDA El microcontrolador Z8 PLUS dedica 14 líneas para puertos de entrada y salida. Estas líneas están agrupadas en dos puertos conocidos como el Puerto A y el Puerto B. El puerto
PUERTOS DE ENTRADA Y SALIDA El microcontrolador Z8 PLUS dedica 14 líneas para puertos de entrada y salida. Estas líneas están agrupadas en dos puertos conocidos como el Puerto A y el Puerto B. El puerto
1 El plan de contingencia. Seguimiento
 1 El plan de contingencia. Seguimiento 1.1 Objetivos generales Los objetivos de este módulo son los siguientes: Conocer los motivos de tener actualizado un plan de contingencia. Comprender que objetivos
1 El plan de contingencia. Seguimiento 1.1 Objetivos generales Los objetivos de este módulo son los siguientes: Conocer los motivos de tener actualizado un plan de contingencia. Comprender que objetivos
Introducción Componentes Básicos Concurrencia y Paralelismo Ejemplos Síntesis Lecturas Recomendadas. Arquitectura de Computadoras
 Arquitectura de Computadoras Contenidos 1 Introducción Computadora Arquitectura Partes de una arquitectura 2 Componentes Básicos CPU Jerarquía de Memoria 3 Concurrencia y Paralelismo Arquitecturas concurrentes
Arquitectura de Computadoras Contenidos 1 Introducción Computadora Arquitectura Partes de una arquitectura 2 Componentes Básicos CPU Jerarquía de Memoria 3 Concurrencia y Paralelismo Arquitecturas concurrentes
EDU_NA005 Mouse PS/2 Emulado por el EDUKIT08...
 COMENTARIO TECNICO Mundo EDUKIT08 Por: Ing. Roberto Simone Ingeniero de aplicaciones Freescale robertosimone@arnet.com.ar Ing. Daniel Di Lella D.F.A.E www.edudevices.com.ar dilella@arnet.com.ar (MDO_EDUKIT_013)
COMENTARIO TECNICO Mundo EDUKIT08 Por: Ing. Roberto Simone Ingeniero de aplicaciones Freescale robertosimone@arnet.com.ar Ing. Daniel Di Lella D.F.A.E www.edudevices.com.ar dilella@arnet.com.ar (MDO_EDUKIT_013)
Semana 3: Entorno de programación CX Programmer
 PLC Semana 3: Entorno de programación CX Programmer CX-PROGRAMMER Para programar un PLC, además de contar con el equipo en cuestión y los conocimientos de programación, necesitaremos el entorno de desarrollo
PLC Semana 3: Entorno de programación CX Programmer CX-PROGRAMMER Para programar un PLC, además de contar con el equipo en cuestión y los conocimientos de programación, necesitaremos el entorno de desarrollo
Temporizadores y contadores en tiempo real: El módulo Timer0 y el prescaler del PIC
 Temporizadores y contadores en tiempo real: El módulo Timer0 y el aler del PIC 1. Introducción...1 2. Estructura del Timer0...1 3. Funcionamiento del Timer0...2 3.1. Entrada de reloj del modulo Timer0...
Temporizadores y contadores en tiempo real: El módulo Timer0 y el aler del PIC 1. Introducción...1 2. Estructura del Timer0...1 3. Funcionamiento del Timer0...2 3.1. Entrada de reloj del modulo Timer0...
PROGRAMACIÓN ORIENTADA A OBJETOS
 PROGRAMACIÓN ORIENTADA A OBJETOS Clase 1. Introducción Profesor: Diego Sánchez Gómez Introducción a la programación orientada a objetos 1. Introducción a la programación orientada a objetos 2. Las clases
PROGRAMACIÓN ORIENTADA A OBJETOS Clase 1. Introducción Profesor: Diego Sánchez Gómez Introducción a la programación orientada a objetos 1. Introducción a la programación orientada a objetos 2. Las clases
Manual de usuario para Android de la aplicación PORTAFIRMAS MÓVIL
 Manual de usuario para Android de la aplicación PORTAFIRMAS MÓVIL Índice 1 Introducción... 5 1.1 Perfil de la aplicación... 5 1.2 Requisitos técnicos... 5 2 Manual de usuario... 7 2.1 Instalación del certificado...
Manual de usuario para Android de la aplicación PORTAFIRMAS MÓVIL Índice 1 Introducción... 5 1.1 Perfil de la aplicación... 5 1.2 Requisitos técnicos... 5 2 Manual de usuario... 7 2.1 Instalación del certificado...
PRACTICA #1. Aprender a programar una interrupción software empleando C y/o Ensamblador.
 PRACTICA #1 Aprender a programar una interrupción software empleando C y/o Ensamblador. Aprender a manipular dispositivos externos (8253, 8255) desde C y/o ensamblador. PROCEDIMIENTO: Vamos a programar
PRACTICA #1 Aprender a programar una interrupción software empleando C y/o Ensamblador. Aprender a manipular dispositivos externos (8253, 8255) desde C y/o ensamblador. PROCEDIMIENTO: Vamos a programar
- El programador no funciona con los siguientes sistemas operativos: Windows NT, ni la familia de Windows 2000
 Precauciones previas: - Lo primero, te recomiendo que imprimas este documento. - El programador no funciona con los siguientes sistemas operativos: Windows NT, ni la familia de Windows 2000 - La velocidad
Precauciones previas: - Lo primero, te recomiendo que imprimas este documento. - El programador no funciona con los siguientes sistemas operativos: Windows NT, ni la familia de Windows 2000 - La velocidad