SUSTENTACION DE LA TESINA DE SEMINARIO
|
|
|
- Antonia Muñoz Duarte
- hace 8 años
- Vistas:
Transcripción
1 Facultad de Ingeniería en Electricidad y Computación TEMA: Identificación y diseño del controlador para un sistema regulador de posición de una antena satelital. SUSTENTACION DE LA TESINA DE SEMINARIO Previo a la obtención del Título de: INGENIERO EN ELECTRONICA Y TELECOMUNICACIONES INGENIERO EN ELECTRICIDAD ESPECIALIZACIÓN ELECTRÓNICA Y AUTOMATIZACIÓN INDUSTRIAL

2 INTEGRANTES ERICK FABRIZZIO HARO ZUMARRAGA LEONARDO ANTONIO RODRIGUEZ JIMENEZ

3 INTRODUCCION La Identificación de Sistemas es un proceso poco conocido en nuestro medio, aunque su campo de aplicación es muy amplio. El presente trabajo se enfocará al estudio e investigación de la Introducción de la Identificación de Sistemas y los diversos métodos que abarca esta técnica.

4 OBJETIVOS Entre los objetivos de nuestro proyecto tenemos los siguientes: Implementar un Prototipo que servirá para el Control de Posicionamiento de una Antena. Realizar las diferentes técnicas de Identificación de Sistemas al Prototipo diseñado. Desarrollar el diseño de un Controlador para mejorar el desempeño del Proceso.

5 MODELO DE UN SISTEMA
6 EL PROCESO DE IDENTIFICACION Obtención de datos de entrada - salida. Para ello se debe excitar el sistema mediante la aplicación de una señal de entrada y registrar la evolución de sus entradas y salidas durante un intervalo de tiempo

7 EL PROCESO DE IDENTIFICACION Tratamiento previo de los datos registrados. Los datos registrados están generalmente acompañados de ruidos indeseados u otro tipo de imperfecciones que puede ser necesario corregir antes de iniciar la identificación del modelo. Se trata, por tanto, de preparar los datos para facilitar y mejorar el proceso de identificación

8 EL PROCESO DE IDENTIFICACION Elección de la estructura del modelo. Si el modelo que se desea obtener es un modelo paramétrico, el primer paso es determinar la estructura deseada para dicho modelo. Esto se facilita en gran medida si se tiene un cierto conocimiento sobre las leyes físicas que rigen el proceso.

9 EL PROCESO DE IDENTIFICACION Obtención de los parámetros del modelo. A continuación se procede a la estimación de los parámetros de la estructura que mejor ajustan la respuesta del modelo a los datos de entrada-salida obtenidos experimentalmente

10 EL PROCESO DE IDENTIFICACION Validación del modelo. El último paso consiste en determinar si el modelo obtenido satisface el grado de exactitud requerido para la aplicación en cuestión. Si se llega a la conclusión de que el modelo no es válido, se deben revisar los siguientes aspectos como posibles causas Poca información Mala estimación Parámetros no satisfactorios

11 EL PROCESO DE IDENTIFICACION Organigrama de la identificación de sistemas

12 BOSQUEJO DE LA ESTRUCTURA DE LA PLANTA
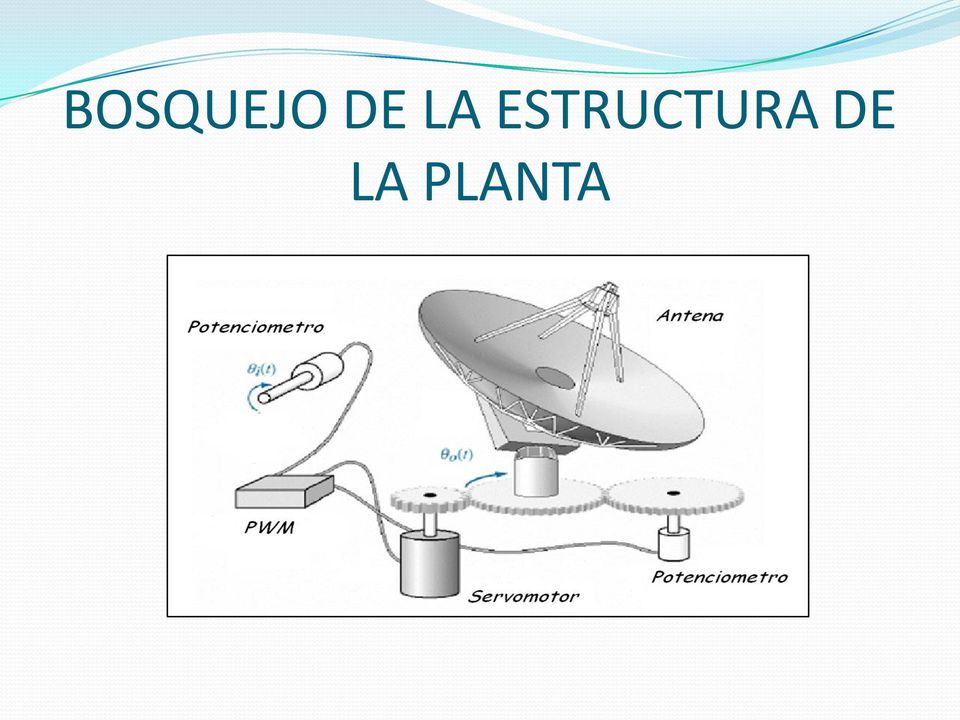
13 FACTORES QUE INTERVIENEN EN EL PROCESO Interviene el factor ambiental Ráfagas de viento La inercia del sistema Los engranajes

14 OBJETIVOS DE CONTROL DE POSICIONAMIENTO DE LA ANTENA Se pretende controlar la posición angular (Φ) de una antena parabólica de acuerdo a una referencia dada (Φref) actuando sobre la tensión de alimentación del Servomotor (Va) que mueve la antena a partir de una reductora con engranajes.
 que mueve la antena a partir de una reductora con")
15 CONSIDERACIONES PRACTICAS SOBRE IDENTIFICACION Elección del tipo de entrada/s La/s entrada/s al sistema deben ser cuidadosamente elegidas de forma que los datos recogidos proporcionen toda la información posible sobre el sistema.

16 CONSIDERACIONES PRACTICAS SOBRE IDENTIFICACION Las señales escalonadas (con cambios bruscos) son muy utilizadas, puesto que contienen un espectro suficientemente amplio de frecuencias Para sistemas lineales, basta con utilizar dos niveles de entrada, preferiblemente barriendo todo el rango de variación permitido. En este tipo de sistemas se suelen utilizar señales binarias de duración aleatoria (conocidas como señales binarias aleatorias o Pseudoaleatorias)

17 CONSIDERACIONES PRACTICAS SOBRE IDENTIFICACION Elección del periodo de muestreo La elección del periodo de muestreo está directamente relacionada con las constantes de tiempo del sistema, y tiene una influencia decisiva en el experimento de identificación Una regla comúnmente usada consiste en escoger una frecuencia de muestreo alrededor de diez veces el ancho de banda del sistema.

18 CONSIDERACIONES PRACTICAS SOBRE IDENTIFICACION Elección del número de muestras a tomar En principio, cuanta más información se tenga sobre el sistema, más exacto será el proceso de identificación. En la práctica, el número de muestras a recoger durante el experimento de identificación viene limitado. Por tanto, es importante llegar a un buen compromiso en la elección del periodo de muestreo y el número de muestras a tomar.

19 CONSIDERACIONES PRACTICAS SOBRE IDENTIFICACION Diseño de la señal de entrada Una señal de entrada debe ser amigable con la planta. Esto es originado de la comunidad de control de procesos, motivado por el deseo de experimentos de identificación que cumplan con lo requerido en la práctica.

20 CONSIDERACIONES PRACTICAS SOBRE IDENTIFICACION Señal Pseudo Aleatoria Binaria Es una entrada determinística periódica que puede ser generada usando registros de desplazamiento y algebra booleana. Las variables principales de diseño son el tiempo de conmutación (tsw), numero de registros a desplazar (nr), y la amplitud de la señal. Sus propiedades de auto-correlación y correlación cruzada, se asemejan a las del ruido blanco.
, y la amplitud de la señal.")
21 TIPOS DE IDENTIFICACION A continuación se nombrará algunos de los Métodos Paramétricos aplicados en la identificación de nuestra planta: ARX (Auto-Regressive with exogenous inputs) ARMAX (Auto-Regressive Moving Average with exogenous inputs) Box-Jenkins Output-Error (Error de salida)
22 Funcionamiento del prototipo
23 Funcionamiento del pic La señal de entrada del PIC será la del potenciómetro la cual varia su valor de 5 a 0v, con esta variación de voltaje hemos programado el pic para que nos brinde 3 velocidades distintas adicional el cambio de giro. Con respecto a las velocidades se dividen en tres partes, rápida, media y lenta
24 Grafico de las velocidades del pic
25 Grafico de los cambios de giro del pic
26 Esquemático del sistema electrónico

27 Diseño de la señal Para el diseño de la señal de entrada se escogió una señal PRBS, que será obtenida mediante el programa Input DesignGui, aplicación realizada en Matlab por Daniel E. Rivera y Martin W. Braun.
28 Para el tipo de planta a analizar, será conveniente diseñar una señal de amplitud de 2.5, con un desfase de 2.5, con lo que obtendremos una señal optima que estará entre 0 y 5; cuando este en alto la antena giraría en sentido horario y cuando este en bajo, giraría en sentido anti-horario.

29 Interfaz Gráfica usada para el diseño de señales
30 Obtención del Tao dominante de la planta La forma que utilizaremos para obtener el Tao de la planta será a partir de la respuesta a una entrada impulso que se realice a la planta. Luego se encuentra el valor de tiempo de cuando la respuesta está en el 63.3% del valor de final

31 3 X: 4520 Y: Voltaje inicial = 0 Voltaje final = 2.85 Valor del paso = % = 1.79 V (x) = 1.79 X = 3.29 Seg.
32 Selección del tiempo de muestreo Alpha Tao Π Tmuestreo , , , , , , , , , ,
33 Selección del tiempo de muestreo a utilizarse De la ecuación anterior podemos observar que dependiendo del valor asignado a, se obtiene el valor máximo del tiempo de muestreo a utilizar Los valores obtenidos en la tabla son sugeridos de la ecuación como valores máximos, es decir se pueden tomar valores menores o iguales a estos Concluyendo el tiempo de muestreo favorable y escogido para la identificación es de Tmuestreo=0.1 s
34 Aspectos a tomar en cuenta para diseño de señales de entrada Mientras menor sea el tiempo de muestreo, mayor cantidad de datos se obtendrán El tiempo de cambio (Switching Time) debe ser por lo menos 10 veces mayor que el Tiempo de Muestreo (Sampling Time)
35 Selección la señal prbs usada en la identificación Nombre Tiempo Muestreo # Reg 1 PRBS PRBS PRBS PRBS PRBS La señal sombreada es la elegida, las anteriores señales presentan un tiempo de duración muy corto o periodos de permanencia en alto o en bajo tan cortos que hacen que la reacción del Servomotor sea nula y no haga el cambio de giro oportuno. 6 PRBS
36 Datos asignados para la creación de nuestra señal: Sampling time = 0.1 Intialdeadtime =1 Final deadtime = 0 Amplitud = 2.5 Signalbias = 2.5 Switching time = 5 Numero de registros =4
37 señal prbs
38 Proceso de Identificación Para realizar la identificación haremos uso de la herramienta IDENT de MATLAB Nos permite de una forma muy amigable importar los datos, seleccionar rangos los cuales servirán para la identificación y validación de los modelos encontrados

39 Interfaz de herramienta System Identification

40 Interfaz para importar datos
41 prbs pot Luego podemos graficar entrada vs salida 4 Input and output signals Time
42 prbs pot Validación de la señal 4 Input and output signals Time
43 Modelos de identificación Nombre Significado na Numero de Polos Comunes nb Numero de Zeros + 1 nc nd nf nk Entrada de Ruido Zeros Entrada de Ruido Polo Numero de Polos Retardo Significado de variables Identificación a la planta
44 Análisis Modelo ARX Interfaz de modelo ARX Aproximaciones de respuestas obtenidas con modelos ARX ARX[na][nb][nk][N] Aproximación arx221n 37.76% arx331n 40.07% arx441n 42.04% arx551n 44.23% arx552n 45.77%
45 Modelo ARX escogido 4 Measured and simulated model output Time Comparación del modelo con la planta real
46 Modelo ARMAX Interfaz de modelo ARMAX aproximaciones de respuestas obtenidas con modelos ARX ARMAX[na][nb][nk][N] Aproximación Amx2221N 70.52% Amx3331N 66.62% Amx4442N 67.81% Amx5552N 67.78%
47 Modelo ARX escogido 4 Measured and simulated model output Time
48 Modelo paramétrico Output Error Interfaz de modelo Output Error Aproximaciones de respuestas obtenidas con modelos OE OE[na][nb][nk][N] Aproximación Oe111A 46.26% Oe221A 85.07% Oe331A 90.07% Oe442A 92.98%
49 Modelo Output Error (OE) escogido Comparación del modelooe442a con la planta real

50 Modelo BOX-JENKINS Interfaz de modelo Box- Jenkins Aproximaciones de respuestas obtenidas con modelos Box-Jenkins BJ[nb][nc][nd][nf][nk]N Aproximación Bj11111A 55.02% Bj22221A 34.54% Bj22222A 30.99% Bj44441A 23.45%
51 Modelo escogidobox-jenkins Comparación del modelo Bj11111A con la planta real 4 Measured and simulated model output Time
52 Análisis de Resultados Modelos escogidos ARX[na][nb][nk][N] Aproximación Arx552N 45.77% ARMAX[na][nb][nc][nk]N Aproximación amx2221n 70.52% OE[nb][nf][nk]N Aproximación Oe442A 92.98% BJ[nb][nc][nd][nf][nk]N Aproximación Bj11111A 55.02%
53 Diseño del Controlador Funcionamiento
54 Funcionamiento
55 Prueba Controlador
56 Salida del sensor
57 CONCLUSIONES Al tener que construir proyectos de este tipo hay que conocer que variables hay que medir y controlar, que equipos de instrumentación se van a utilizar para ayudar a controlar el proceso en base al controlador, ya que si no se tiene presente esto nose podrá hacer una correcta identificación del sistema Luego de varias pruebas con varios modelos en las simulaciones realizadas se comprobó que el modelo que más se ajusta a la dinámica del sistema real fue el OE (Output-Error) Queda demostrado, además que los modelos encontrados por este método constituyen una buena aproximación de los sistemas reales y pueden ser utilizados en el diseño de controladores automáticos.
58 CONCLUSIONES La adquisición de datos a través de tarjetas DAQ con Matlab, permite conectarnos en tiempo real con procesos analógico, digital en forma simple. Sólo se requiere que la DAQ sea reconocida por Matlab. Matlab reconoce los sistemas de adquisición de datos de la mayoría de fabricantes conocidos.
59 RECOMENDACIONES Es necesario que al momento de la identificación, tener una inducción del uso de la tarjeta de adquisición de datos, debido a que el ingreso de voltajes no tolerables para la misma puede afectarla e inclusive dañarla. Para una correcta estimación del modelo real del proyecto, se requiere realizar varias validaciones de los distintos modelos (ARX, ARMAX, OE, BJ), modificando así sus parámetros y de esta forma llegar a la mejor.
60 RECOMENDACIONES La señal PRBS debe diseñarse en base a las características del sistema previamente conocidas. Se recomienda siempre tener en cuenta todas las perturbaciones externas que afectan el sistema.
4.2 Acción de Control.
 CAPÍTULO IV. PRUEBAS Y RESULTADOS. 4.1 Introducción. En este capítulo se exponen los resultados obtenidos después de efectuar las pruebas sobre el programa Control de Movimiento Empleando LabVIEW, que
CAPÍTULO IV. PRUEBAS Y RESULTADOS. 4.1 Introducción. En este capítulo se exponen los resultados obtenidos después de efectuar las pruebas sobre el programa Control de Movimiento Empleando LabVIEW, que
Determinación experimental de la respuesta en frecuencia
 Determinación experimental de la respuesta en frecuencia Análisis Dinámico de Sistemas (Teleco) Área de Ingeniería de Sistemas y Automática Escuela Politécnica Superior de Ingeniería Gijón Universidad
Determinación experimental de la respuesta en frecuencia Análisis Dinámico de Sistemas (Teleco) Área de Ingeniería de Sistemas y Automática Escuela Politécnica Superior de Ingeniería Gijón Universidad
PARTE III OBTENCIÓN DE MODELOS OBTENCIÓN DE MODELOS MODELADO E IDENTIFICACIÓN ASPECTOS A TENER EN CUENTA MODELADO IDENTIFICACIÓN OBTENCIÓN DE MODELOS
 OBTENCIÓN DE MODELOS PARTE III OBTENCIÓN DE MODELOS 1. INFORMACIÓN SOBRE EL SISTEMA 1. EL PROPIO SISTEMA (OBSERVACIÓN, TEST) 2. CONOCIMIENTO TEÓRICO (LEYES DE LA NATURALEZA, EXPERTOS, LITERATURA, ETC.)
OBTENCIÓN DE MODELOS PARTE III OBTENCIÓN DE MODELOS 1. INFORMACIÓN SOBRE EL SISTEMA 1. EL PROPIO SISTEMA (OBSERVACIÓN, TEST) 2. CONOCIMIENTO TEÓRICO (LEYES DE LA NATURALEZA, EXPERTOS, LITERATURA, ETC.)
La presente tesis pretende que los estudiantes observen la teoría de las acciones de control
 CAPÍTULO V. CONCLUSIONES. La presente tesis pretende que los estudiantes observen la teoría de las acciones de control de forma virtual al mismo tiempo analicen físicamente los sistemas electrónicos cuando
CAPÍTULO V. CONCLUSIONES. La presente tesis pretende que los estudiantes observen la teoría de las acciones de control de forma virtual al mismo tiempo analicen físicamente los sistemas electrónicos cuando
DISEÑO E IMPLEMENTACIÓN DE UNA TARJETA DE ADQUISICIÓN DE DATOS PARA EL LABORATORIO DE TELECOMUNICACIONES DE LA FIEC.
 TESIS DISEÑO E IMPLEMENTACIÓN DE UNA TARJETA DE ADQUISICIÓN DE DATOS PARA EL LABORATORIO DE TELECOMUNICACIONES DE LA FIEC. DIRECTOR DE TESIS.- Ing. Francisco Novillo AUTOR Walter Mestanza Vera. Egresado
TESIS DISEÑO E IMPLEMENTACIÓN DE UNA TARJETA DE ADQUISICIÓN DE DATOS PARA EL LABORATORIO DE TELECOMUNICACIONES DE LA FIEC. DIRECTOR DE TESIS.- Ing. Francisco Novillo AUTOR Walter Mestanza Vera. Egresado
Circuito RC, Respuesta a la frecuencia.
 Circuito RC, Respuesta a la frecuencia. A.M. Velasco (133384) J.P. Soler (133380) O.A. Botina (13368) Departamento de física, facultad de ciencias, Universidad Nacional de Colombia Resumen. Se armó un
Circuito RC, Respuesta a la frecuencia. A.M. Velasco (133384) J.P. Soler (133380) O.A. Botina (13368) Departamento de física, facultad de ciencias, Universidad Nacional de Colombia Resumen. Se armó un
No hay resorte que oscile cien años...
 No hay resorte que oscile cien años... María Paula Coluccio y Patricia Picardo Laboratorio I de Física para Biólogos y Geólogos Depto. de Física, FCEyN, UBA - 1999 Resumen: En el presente trabajo nos proponemos
No hay resorte que oscile cien años... María Paula Coluccio y Patricia Picardo Laboratorio I de Física para Biólogos y Geólogos Depto. de Física, FCEyN, UBA - 1999 Resumen: En el presente trabajo nos proponemos
Práctica de Cinemática
 Práctica de Estudio de un movimiento Objetivos...2 Pre - requisitos para realizar la práctica...2 Bibliografía recomendada en referencia la modelo teórico...2 Competencias a desarrollar por el alumno...2
Práctica de Estudio de un movimiento Objetivos...2 Pre - requisitos para realizar la práctica...2 Bibliografía recomendada en referencia la modelo teórico...2 Competencias a desarrollar por el alumno...2
IDENTIFICACIÓN DE SISTEMAS ASPECTOS PRÁCTICOS EN IDENTIFICACIÓN
 IDENTIFICACIÓN DE SISTEMAS ASPECTOS PRÁCTICOS EN IDENTIFICACIÓN Ing. Fredy Ruiz Ph.D. ruizf@javeriana.edu.co Maestría en Ingeniería Electrónica Pontificia Universidad Javeriana 2013 CONSIDERACIONES PRÁCTICAS
IDENTIFICACIÓN DE SISTEMAS ASPECTOS PRÁCTICOS EN IDENTIFICACIÓN Ing. Fredy Ruiz Ph.D. ruizf@javeriana.edu.co Maestría en Ingeniería Electrónica Pontificia Universidad Javeriana 2013 CONSIDERACIONES PRÁCTICAS
Circuito RL, Respuesta a la frecuencia.
 Circuito RL, Respuesta a la frecuencia. A.M. Velasco (133384) J.P. Soler (133380) O.A. Botina (133268) Departamento de física, facultad de ciencias, Universidad Nacional de Colombia Resumen. Se estudia
Circuito RL, Respuesta a la frecuencia. A.M. Velasco (133384) J.P. Soler (133380) O.A. Botina (133268) Departamento de física, facultad de ciencias, Universidad Nacional de Colombia Resumen. Se estudia
Adquisición de Datos usando Matlab
 21 Adquisición de Datos usando Matlab Bruno Vargas Tamani Facultad de Ingeniería Electrónica y Eléctrica, Universidad Nacional Mayor de San Marcos, Lima, Perú RESUMEN: La interconexión a nivel de computadoras
21 Adquisición de Datos usando Matlab Bruno Vargas Tamani Facultad de Ingeniería Electrónica y Eléctrica, Universidad Nacional Mayor de San Marcos, Lima, Perú RESUMEN: La interconexión a nivel de computadoras
PRÁCTICA 4: IDENTIFICACIÓN Y CONTROL DE UN SERVOMECANISMO DE POSICIÓN CURSO 2007/2008
 PRÁCTICA 4: IDENTIFICACIÓN Y CONTROL DE UN SERVOMECANISMO DE POSICIÓN CURSO 2007/2008 LABORATORIO DE CONTROL AUTOMÁTICO. 3 er CURSO ING. TELECOMUNICACIÓN 1. OBJETIVOS En esta práctica se pretende que el
PRÁCTICA 4: IDENTIFICACIÓN Y CONTROL DE UN SERVOMECANISMO DE POSICIÓN CURSO 2007/2008 LABORATORIO DE CONTROL AUTOMÁTICO. 3 er CURSO ING. TELECOMUNICACIÓN 1. OBJETIVOS En esta práctica se pretende que el
Señal de Referencia: Es el valor que se desea que alcance la señal de salida. SET POINT.
 EL ABC DE LA AUTOMATIZACION ALGORITMO DE CONTROL PID; por Aldo Amadori Introducción El Control automático desempeña un papel importante en los procesos de manufactura, industriales, navales, aeroespaciales,
EL ABC DE LA AUTOMATIZACION ALGORITMO DE CONTROL PID; por Aldo Amadori Introducción El Control automático desempeña un papel importante en los procesos de manufactura, industriales, navales, aeroespaciales,
"Diseño, construcción e implementación de modelos matemáticos para el control automatizado de inventarios
 "Diseño, construcción e implementación de modelos matemáticos para el control automatizado de inventarios Miguel Alfonso Flores Sánchez 1, Fernando Sandoya Sanchez 2 Resumen En el presente artículo se
"Diseño, construcción e implementación de modelos matemáticos para el control automatizado de inventarios Miguel Alfonso Flores Sánchez 1, Fernando Sandoya Sanchez 2 Resumen En el presente artículo se
CAPITULO 4. Inversores para control de velocidad de motores de
 CAPITULO 4. Inversores para control de velocidad de motores de inducción mediante relación v/f. 4.1 Introducción. La frecuencia de salida de un inversor estático está determinada por la velocidad de conmutación
CAPITULO 4. Inversores para control de velocidad de motores de inducción mediante relación v/f. 4.1 Introducción. La frecuencia de salida de un inversor estático está determinada por la velocidad de conmutación
ANTENAS: CONCEPTOS TRIGONOMETRICOS
 8-DE NUESTROS COLEGAS 1ª Parte. ANTENAS: CONCEPTOS TRIGONOMETRICOS Todas las antenas usadas dentro de la Radioafición, son básicamente un dipolo, es decir que tienen 1/2 longitud de onda y por utilizar
8-DE NUESTROS COLEGAS 1ª Parte. ANTENAS: CONCEPTOS TRIGONOMETRICOS Todas las antenas usadas dentro de la Radioafición, son básicamente un dipolo, es decir que tienen 1/2 longitud de onda y por utilizar
ÍNDICE DISEÑO DE CONTADORES SÍNCRONOS JESÚS PIZARRO PELÁEZ
 ELECTRÓNICA DIGITAL DISEÑO DE CONTADORES SÍNCRONOS JESÚS PIZARRO PELÁEZ IES TRINIDAD ARROYO DPTO. DE ELECTRÓNICA ÍNDICE ÍNDICE... 1 1. LIMITACIONES DE LOS CONTADORES ASÍNCRONOS... 2 2. CONTADORES SÍNCRONOS...
ELECTRÓNICA DIGITAL DISEÑO DE CONTADORES SÍNCRONOS JESÚS PIZARRO PELÁEZ IES TRINIDAD ARROYO DPTO. DE ELECTRÓNICA ÍNDICE ÍNDICE... 1 1. LIMITACIONES DE LOS CONTADORES ASÍNCRONOS... 2 2. CONTADORES SÍNCRONOS...
Ensayos Básicos con las Máquinas Eléctricas Didácticas EXPERIMENTOS CON LAS MÁQUINAS ELÉCTRICAS
 Ensayos Básicos con las Máquinas Eléctricas Didácticas EXPERIMENTOS CON LAS MÁQUINAS ELÉCTRICAS Experimentos con Máquinas Eléctricas Didácticas 2 ÍNDICE 1 Introducción...3 2 Máquinas de Corriente Continua...4
Ensayos Básicos con las Máquinas Eléctricas Didácticas EXPERIMENTOS CON LAS MÁQUINAS ELÉCTRICAS Experimentos con Máquinas Eléctricas Didácticas 2 ÍNDICE 1 Introducción...3 2 Máquinas de Corriente Continua...4
TELEOPERACIÓN DE UN ROBOT MOVIL CON MANEJO DIFERENCIAL A BAJO COSTO
 TELEOPERACIÓN DE UN ROBOT MOVIL CON MANEJO DIFERENCIAL A BAJO COSTO Introducción.- Asanza,V 1 ; Laica,J 1 ; Paillacho,D 1 1. Centro de Visión y Robotica {vasanza, jlaica, dpailla} @fiec.espol.edu.ec Un
TELEOPERACIÓN DE UN ROBOT MOVIL CON MANEJO DIFERENCIAL A BAJO COSTO Introducción.- Asanza,V 1 ; Laica,J 1 ; Paillacho,D 1 1. Centro de Visión y Robotica {vasanza, jlaica, dpailla} @fiec.espol.edu.ec Un
Laboratorio de Física Universitaria II. FISI 3014 Primer semestre del año académico 2003-2004 Departamento de Física y Electrónica de la UPR-H
 Laboratorio de Física Universitaria II. FISI 3014 Primer semestre del año académico 2003-2004 Departamento de Física y Electrónica de la UPR-H Introducción El programa de Data Studio 1.7, es una aplicación
Laboratorio de Física Universitaria II. FISI 3014 Primer semestre del año académico 2003-2004 Departamento de Física y Electrónica de la UPR-H Introducción El programa de Data Studio 1.7, es una aplicación
CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION
 CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION Como hemos dicho anteriormente, los instrumentos de medición hacen posible la observación de los fenómenos eléctricos y su cuantificación. Ahora
CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION Como hemos dicho anteriormente, los instrumentos de medición hacen posible la observación de los fenómenos eléctricos y su cuantificación. Ahora
Comparadores de tensión
 Universidad Nacional de Rosario Facultad de Ciencias Exactas, Ingeniería y Agrimensura Escuela de Ingeniería Electrónica ELECTRÓNICA II NOTAS DE CLASE Comparadores de tensión OBJETIVOS - CONOCIMIENTOS
Universidad Nacional de Rosario Facultad de Ciencias Exactas, Ingeniería y Agrimensura Escuela de Ingeniería Electrónica ELECTRÓNICA II NOTAS DE CLASE Comparadores de tensión OBJETIVOS - CONOCIMIENTOS
SONDA LAMBDA DE BANDA ANCHA VEHICULO: SEAT VW AUDI SKODA - OTROS INTRODUCCION: EL PORQUE DE LA SONDA LAMBDA DE BANDA ANCHA SONDA LAMBDA CONVENCIONAL
 SONDA LAMBDA DE BANDA ANCHA VEHICULO: SEAT VW AUDI SKODA - OTROS INTRODUCCION: Este articulo es sobre pruebas que se han realizado en dos tipos de sondas lambdas de banda ancha, tipo BOSCH y tipo NTK.
SONDA LAMBDA DE BANDA ANCHA VEHICULO: SEAT VW AUDI SKODA - OTROS INTRODUCCION: Este articulo es sobre pruebas que se han realizado en dos tipos de sondas lambdas de banda ancha, tipo BOSCH y tipo NTK.
AUTOMATIZACIÓN INDUSTRIAL DESCRIPCIÓN Y MANEJO DEL SERVOMOTOR DE PRÁCTICAS
 3º INGENIERÍA TÉCNICA INDUSTRIAL, ESPECIALIDAD MECÁNICA AUTOMATIZACIÓN INDUSTRIAL PRÁCTICA 5 DESCRIPCIÓN Y MANEJO DEL SERVOMOTOR DE PRÁCTICAS OBJETIVOS DE LA PRÁCTICA Identificar sobre un montaje real
3º INGENIERÍA TÉCNICA INDUSTRIAL, ESPECIALIDAD MECÁNICA AUTOMATIZACIÓN INDUSTRIAL PRÁCTICA 5 DESCRIPCIÓN Y MANEJO DEL SERVOMOTOR DE PRÁCTICAS OBJETIVOS DE LA PRÁCTICA Identificar sobre un montaje real
EL PROGRAMA PROTEUS Análisis de Circuitos
 EL PROGRAMA PROTEUS Análisis de Circuitos Introducción Como ya se ha indicado, el Programa PROTEUS, posee entre sus utilidades el análisis de circuitos. Para efectuar dicho análisis, lo primero que deberemos
EL PROGRAMA PROTEUS Análisis de Circuitos Introducción Como ya se ha indicado, el Programa PROTEUS, posee entre sus utilidades el análisis de circuitos. Para efectuar dicho análisis, lo primero que deberemos
ESCUELA POLITÉCNICA NACIONAL
 1 ESCUELA POLITÉCNICA NACIONAL INSTITUTO DE CIENCIAS BÁSICAS APLICACIÓN DE LAS FÓRMULAS Y CONCEPTOS DE MOVIMINETO CIRCULAR UNIFORME Y MOVIMINETO CIRCULAR UNIFORME VARIADO TALLER GRUPAL DANIELA FRANCESCA
1 ESCUELA POLITÉCNICA NACIONAL INSTITUTO DE CIENCIAS BÁSICAS APLICACIÓN DE LAS FÓRMULAS Y CONCEPTOS DE MOVIMINETO CIRCULAR UNIFORME Y MOVIMINETO CIRCULAR UNIFORME VARIADO TALLER GRUPAL DANIELA FRANCESCA
Comenzando con MATLAB
 ÁLGEBRA LINEAL INGENIERÍA INFORMÁTICA Curso 08/09 PRÁCTICA 1 Comenzando con MATLAB 1 Funcionamiento de Matlab MATLAB es un sistema interactivo basado en matrices para cálculos científicos y de ingeniería.
ÁLGEBRA LINEAL INGENIERÍA INFORMÁTICA Curso 08/09 PRÁCTICA 1 Comenzando con MATLAB 1 Funcionamiento de Matlab MATLAB es un sistema interactivo basado en matrices para cálculos científicos y de ingeniería.
Modelo matemático de las autoclaves industriales
 AUTOMÁTICA Y ELECTRÓNICA Ingeniería Electrónica, Automática y Comunicaciones, Vol. XXIII, No. 2, 2002 Modelo matemático de las autoclaves industriales J. E. González y R. Misa Empresa Laboratorio Farmacéutico
AUTOMÁTICA Y ELECTRÓNICA Ingeniería Electrónica, Automática y Comunicaciones, Vol. XXIII, No. 2, 2002 Modelo matemático de las autoclaves industriales J. E. González y R. Misa Empresa Laboratorio Farmacéutico
Instrumentación y Ley de OHM
 Instrumentación y Ley de OHM A) INSTRUMENTACIÓN 1. OBJETIVOS. 1. Conocer el manejo de instrumentos y materiales de uso corriente en los experimentos de electricidad y magnetismo. 2. Conocer el área de
Instrumentación y Ley de OHM A) INSTRUMENTACIÓN 1. OBJETIVOS. 1. Conocer el manejo de instrumentos y materiales de uso corriente en los experimentos de electricidad y magnetismo. 2. Conocer el área de
CONVERTIDORES DIGITAL ANALÓGICO Y ANALÓGICO - DIGITAL
 CONVERTIDORES DIGITAL ANALÓGICO Y ANALÓGICO - DIGITAL CONVERTIDORES DIGITAL ANALÓGICO Las dos operaciones E/S relativas al proceso de mayor importancia son la conversión de digital a analógico D/A y la
CONVERTIDORES DIGITAL ANALÓGICO Y ANALÓGICO - DIGITAL CONVERTIDORES DIGITAL ANALÓGICO Las dos operaciones E/S relativas al proceso de mayor importancia son la conversión de digital a analógico D/A y la
12.1 PLANIFICAR LAS ADQUISICIONES PROYECTO TÉCNICO
 12.1 PLANIFICAR LAS ADQUISICIONES PROYECTO TÉCNICO Documento redactado por Documento revisado por Documento aprobado por Jordi Labandeira Alberto Arnáez 25-08-12 Joaquín de Abreu 02-09-12 David Naranjo
12.1 PLANIFICAR LAS ADQUISICIONES PROYECTO TÉCNICO Documento redactado por Documento revisado por Documento aprobado por Jordi Labandeira Alberto Arnáez 25-08-12 Joaquín de Abreu 02-09-12 David Naranjo
AHORRACOM SOLUCIONES AVANZADAS S.L. Avda. de la Industria 13, Oficina 25. 28108 Alcobendas, Madrid. www.ahorracom.com
 PAGTE Plan de Ahorro y Gestión de Telecomunicaciones para Empresas En Ahorracom nos ponemos de su parte. Por eso nos interesa que usted, nuestro cliente, esté al tanto de todos los procesos que llevamos
PAGTE Plan de Ahorro y Gestión de Telecomunicaciones para Empresas En Ahorracom nos ponemos de su parte. Por eso nos interesa que usted, nuestro cliente, esté al tanto de todos los procesos que llevamos
SISTEMAS DE CONTROL PRÁCTICAS DE SISTEMAS DE CONTROL IDENTIFICACIÓN EN EL DOMINIO DE LA FRECUENCIA
 SISTEMAS DE CONTROL PRÁCTICAS DE SISTEMAS DE CONTROL IDENTIFICACIÓN EN EL DOMINIO DE LA FRECUENCIA 1. SISTEMA A IDENTIFICAR El sistema a identificar es el conjunto motor eléctrico-freno conocido de otras
SISTEMAS DE CONTROL PRÁCTICAS DE SISTEMAS DE CONTROL IDENTIFICACIÓN EN EL DOMINIO DE LA FRECUENCIA 1. SISTEMA A IDENTIFICAR El sistema a identificar es el conjunto motor eléctrico-freno conocido de otras
La relación entre la altura de caída y el tiempo que tarda en rebotar 6 veces una pelota
 La relación entre la altura de caída y el tiempo que tarda en rebotar 6 veces una pelota INTRODUCCIÓN En este experimento voy a relacionar el tiempo que tarda una pelota en rebotar 6 veces desde distintas
La relación entre la altura de caída y el tiempo que tarda en rebotar 6 veces una pelota INTRODUCCIÓN En este experimento voy a relacionar el tiempo que tarda una pelota en rebotar 6 veces desde distintas
1. a) Definimos X =número de personas con síntomas si examino sólo una persona, la cual sigue una distribución B(1, p), donde
 Definimos X =número de personas con síntomas si examino sólo una persona, la cual sigue una distribución B(1, p), donde") Soluciones de la relación del Tema 6. 1. a) Definimos X =número de personas con síntomas si examino sólo una persona, la cual sigue una distribución B1, p), donde p = P X = 1) = P la persona presente síntomas)
Soluciones de la relación del Tema 6. 1. a) Definimos X =número de personas con síntomas si examino sólo una persona, la cual sigue una distribución B1, p), donde p = P X = 1) = P la persona presente síntomas)
UNIVERSIDAD DE SALAMANCA
 UNIVERSIDAD DE SALAMANCA FACULTAD DE CIENCIAS INGENIERÍA TÉCNICA EN INFORMÁTICA DE SISTEMAS Resumen del trabajo práctico realizado para la superación de la asignatura Proyecto Fin de Carrera. TÍTULO SISTEMA
UNIVERSIDAD DE SALAMANCA FACULTAD DE CIENCIAS INGENIERÍA TÉCNICA EN INFORMÁTICA DE SISTEMAS Resumen del trabajo práctico realizado para la superación de la asignatura Proyecto Fin de Carrera. TÍTULO SISTEMA
Características de funciones que son inversas de otras
 Características de funciones que son inversas de otras Si f es una función inyectiva, llamamos función inversa de f y se representa por f 1 al conjunto. f 1 = a, b b, a f} Es decir, f 1 (x, y) = { x =
Características de funciones que son inversas de otras Si f es una función inyectiva, llamamos función inversa de f y se representa por f 1 al conjunto. f 1 = a, b b, a f} Es decir, f 1 (x, y) = { x =
Control de la temperatura ambiente en un invernadero tipo venlo, mediante el uso del microcontrolador 8031
 Control de la temperatura ambiente en un invernadero tipo venlo, mediante el uso del microcontrolador 8031 GENARO CALDERÓN RODRÍGUEZ HÉCTOR HORACIO OCHOA NARANJO FACULTAD DE INGENIERÍA MECANICA Y ELÉCTRICA
Control de la temperatura ambiente en un invernadero tipo venlo, mediante el uso del microcontrolador 8031 GENARO CALDERÓN RODRÍGUEZ HÉCTOR HORACIO OCHOA NARANJO FACULTAD DE INGENIERÍA MECANICA Y ELÉCTRICA
1. SENSORES DE TEMPERATURA
 1. SENSORES DE TEMPERATURA 1.1. INTRODUCCIÓN. El objetivo de esta práctica es conocer, caracterizar y aplicar uno de los sensores de temperatura más conocidos, una NTC (Negative Temperature Coefficient).
1. SENSORES DE TEMPERATURA 1.1. INTRODUCCIÓN. El objetivo de esta práctica es conocer, caracterizar y aplicar uno de los sensores de temperatura más conocidos, una NTC (Negative Temperature Coefficient).
ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL Facultad de Ingeniera en Electricidad y Computación
 ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL Facultad de Ingeniera en Electricidad y Computación Tema: NEGOCIOS EN INTERNET SUBASTATODO.COM Integrantes: Marianas Arias Peña 1 María Teresa Figueroa 2 José Zambrano
ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL Facultad de Ingeniera en Electricidad y Computación Tema: NEGOCIOS EN INTERNET SUBASTATODO.COM Integrantes: Marianas Arias Peña 1 María Teresa Figueroa 2 José Zambrano
La importancia de dimensionar correctamente los sistemas de frenado en aerogeneradores residenciales.
 La importancia de dimensionar correctamente los sistemas de frenado en aerogeneradores residenciales. La instalación de aerogeneradores en entornos urbanos requiere la implementación de importantes medidas
La importancia de dimensionar correctamente los sistemas de frenado en aerogeneradores residenciales. La instalación de aerogeneradores en entornos urbanos requiere la implementación de importantes medidas
Regulador PID con convertidores de frecuencia DF5, DV5, DF6, DV6. Página 1 de 10 A Regulador PID
 A Página 1 de 10 A Regulador PID INDICE 1. Regulador PID 3 2. Componente proporcional : P 4 3. Componente integral : I 4 4. Componente derivativa : D 4 5. Control PID 4 6. Configuración de parámetros del
A Página 1 de 10 A Regulador PID INDICE 1. Regulador PID 3 2. Componente proporcional : P 4 3. Componente integral : I 4 4. Componente derivativa : D 4 5. Control PID 4 6. Configuración de parámetros del
Naturaleza binaria. Conversión decimal a binario
 Naturaleza binaria En los circuitos digitales sólo hay 2 voltajes. Esto significa que al utilizar 2 estados lógicos se puede asociar cada uno con un nivel de tensión, así se puede codificar cualquier número,
Naturaleza binaria En los circuitos digitales sólo hay 2 voltajes. Esto significa que al utilizar 2 estados lógicos se puede asociar cada uno con un nivel de tensión, así se puede codificar cualquier número,
Empresa de telefonía celular: Transintelcel
 Empresa de telefonía celular: Transintelcel El proceso metodológico de esta investigación de mercados está dividido en las siguientes etapas: 1. Datos generales de la empresa 2. Planteamiento del problema
Empresa de telefonía celular: Transintelcel El proceso metodológico de esta investigación de mercados está dividido en las siguientes etapas: 1. Datos generales de la empresa 2. Planteamiento del problema
Seis Sigma. Nueva filosofía Administrativa.
 Seis Sigma. Nueva filosofía Administrativa. GIN. Filosofía de Calidad. El Seis Sigma es un parámetro cuya base principal es la desviación estándar y su enfoque es reducir la variación y/o defectos en lo
Seis Sigma. Nueva filosofía Administrativa. GIN. Filosofía de Calidad. El Seis Sigma es un parámetro cuya base principal es la desviación estándar y su enfoque es reducir la variación y/o defectos en lo
EL PROGRAMA PROTEUS Instrumentación Básica y Simulación
 EL PROGRAMA PROTEUS Instrumentación Básica y Simulación Introducción Como ya se ha indicado, el Programa PROTEUS, posee entre sus utilidades una variada instrumentación virtual que nos facilita el análisis
EL PROGRAMA PROTEUS Instrumentación Básica y Simulación Introducción Como ya se ha indicado, el Programa PROTEUS, posee entre sus utilidades una variada instrumentación virtual que nos facilita el análisis
punto, es que los criterios de evaluación de las medidas antes citadas se ajustan a las medidas señaladas para la toma del indicador VTD.
 CONSULTA Para esta Comisión es muy importante conocer los comentarios sectoriales relacionados con el contenido del entregable presentado por la firma Iteco en el marco del Contrato 038 de 2014, para avanzar
CONSULTA Para esta Comisión es muy importante conocer los comentarios sectoriales relacionados con el contenido del entregable presentado por la firma Iteco en el marco del Contrato 038 de 2014, para avanzar
Adaptación al NPGC. Introducción. NPGC.doc. Qué cambios hay en el NPGC? Telf.: 93.410.92.92 Fax.: 93.419.86.49 e-mail:atcliente@websie.
 Adaptación al NPGC Introducción Nexus 620, ya recoge el Nuevo Plan General Contable, que entrará en vigor el 1 de Enero de 2008. Este documento mostrará que debemos hacer a partir de esa fecha, según nuestra
Adaptación al NPGC Introducción Nexus 620, ya recoge el Nuevo Plan General Contable, que entrará en vigor el 1 de Enero de 2008. Este documento mostrará que debemos hacer a partir de esa fecha, según nuestra
SERVOMOTORES. Los servos se utilizan frecuentemente en sistemas de radiocontrol, mecatrónicos y robótica, pero su uso no está limitado a estos.
 SERVOMOTORES Un servomotor (también llamado Servo) es un dispositivo similar a un motor DC, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación y mantenerse estable
SERVOMOTORES Un servomotor (también llamado Servo) es un dispositivo similar a un motor DC, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación y mantenerse estable
Equipos de medición. Intervalos de calibración e interpretación de Certificados de Calibración
 Equipos de medición. Intervalos de calibración e interpretación de Certificados de Calibración Equipos de Medición. Intervalos de calibración e interpretación de Certificados de Calibración Disertante:
Equipos de medición. Intervalos de calibración e interpretación de Certificados de Calibración Equipos de Medición. Intervalos de calibración e interpretación de Certificados de Calibración Disertante:
Seguimiento y evaluación
 Seguimiento y evaluación Por qué es necesario contar con herramientas para el seguimiento y la evaluación? Es la manera en que se puede evaluar la calidad e impacto del trabajo en relación con el plan
Seguimiento y evaluación Por qué es necesario contar con herramientas para el seguimiento y la evaluación? Es la manera en que se puede evaluar la calidad e impacto del trabajo en relación con el plan
Introducción a los sistemas de control
 Introducción a los sistemas de control Sistema Un sistema es una combinación de componentes que actúan juntos y realizan un objetivo determinado A un sistema se le puede considerar como una caja negra
Introducción a los sistemas de control Sistema Un sistema es una combinación de componentes que actúan juntos y realizan un objetivo determinado A un sistema se le puede considerar como una caja negra
CAPÍTULO 4. DISEÑO CONCEPTUAL Y DE CONFIGURACIÓN. Figura 4.1.Caja Negra. Generar. Sistema de control. Acumular. Figura 4.2. Diagrama de funciones
 CAPÍTULO 4 37 CAPÍTULO 4. DISEÑO CONCEPTUAL Y DE CONFIGURACIÓN Para diseñar el SGE, lo primero que se necesita es plantear diferentes formas en las que se pueda resolver el problema para finalmente decidir
CAPÍTULO 4 37 CAPÍTULO 4. DISEÑO CONCEPTUAL Y DE CONFIGURACIÓN Para diseñar el SGE, lo primero que se necesita es plantear diferentes formas en las que se pueda resolver el problema para finalmente decidir
Tutorial de Electrónica
 Tutorial de Electrónica Introducción Conseguir que la tensión de un circuito en la salida sea fija es uno de los objetivos más importantes para que un circuito funcione correctamente. Para lograrlo, se
Tutorial de Electrónica Introducción Conseguir que la tensión de un circuito en la salida sea fija es uno de los objetivos más importantes para que un circuito funcione correctamente. Para lograrlo, se
MEDICIONES ELECTRICAS I
 Año:... Alumno:... Comisión:... MEDICIONES ELECTRICAS I Trabajo Práctico N 4 Tema: FACTOR DE FORMA Y DE LECTURA. RESPUESTA EN FRECUENCIA DE INSTRUMENTOS. Tipos de instrumentos Según el principio en que
Año:... Alumno:... Comisión:... MEDICIONES ELECTRICAS I Trabajo Práctico N 4 Tema: FACTOR DE FORMA Y DE LECTURA. RESPUESTA EN FRECUENCIA DE INSTRUMENTOS. Tipos de instrumentos Según el principio en que
Ejemplo real: : Para obtener la función de transferencia de un motor de C.D. aplicándole una entrada escalón.
 Ejemplo real: : Para obtener la función de transferencia de un motor de C.D. aplicándole una entrada escalón. El siguiente es un ejemplo de la respuesta de un motor de CD a la entrada escalón unitario
Ejemplo real: : Para obtener la función de transferencia de un motor de C.D. aplicándole una entrada escalón. El siguiente es un ejemplo de la respuesta de un motor de CD a la entrada escalón unitario
Nociones básicas sobre adquisición de señales
 Electrónica ENTREGA 1 Nociones básicas sobre adquisición de señales Elaborado por Juan Antonio Rubia Mena Introducción Con este documento pretendemos dar unas nociones básicas sobre las técnicas de medida
Electrónica ENTREGA 1 Nociones básicas sobre adquisición de señales Elaborado por Juan Antonio Rubia Mena Introducción Con este documento pretendemos dar unas nociones básicas sobre las técnicas de medida
PRÁCTICA 5. OSCILOSCOPIOS CON DOBLE BASE DE TIEMPO. OSCILOSCOPIO HM 1004 (III). MULTIVIBRADOR ASTABLE INTEGRADO.
. MULTIVIBRADOR ASTABLE INTEGRADO.") PRÁCTICA 5. OSCILOSCOPIOS CON DOBLE BASE DE TIEMPO. OSCILOSCOPIO HM 1004 (III). MULTIVIBRADOR ASTABLE INTEGRADO. DETERMINACIÓN DE LA FRECUENCIA DE TRABAJO. MEDIDAS DE PARÁMETROS DE LA SEÑAL AYUDADOS DE
PRÁCTICA 5. OSCILOSCOPIOS CON DOBLE BASE DE TIEMPO. OSCILOSCOPIO HM 1004 (III). MULTIVIBRADOR ASTABLE INTEGRADO. DETERMINACIÓN DE LA FRECUENCIA DE TRABAJO. MEDIDAS DE PARÁMETROS DE LA SEÑAL AYUDADOS DE
CAPITULO III MARCO METODOLÓGICO. La presente investigación plantea como objetivo el diseño de un prototipo
 CAPITULO III MARCO METODOLÓGICO 1. Tipo de Investigación La presente investigación plantea como objetivo el diseño de un prototipo de robot industrial para la automatización del proceso de conformado de
CAPITULO III MARCO METODOLÓGICO 1. Tipo de Investigación La presente investigación plantea como objetivo el diseño de un prototipo de robot industrial para la automatización del proceso de conformado de
FUENTES DE ALIMENTACION
 FUENTES DE ALIMENTACION INTRODUCCIÓN Podemos definir fuente de alimentación como aparato electrónico modificador de la electricidad que convierte la tensión alterna en una tensión continua. Remontándonos
FUENTES DE ALIMENTACION INTRODUCCIÓN Podemos definir fuente de alimentación como aparato electrónico modificador de la electricidad que convierte la tensión alterna en una tensión continua. Remontándonos
PRODUCTIVIDAD DE PROYECTOS DE DESARROLLO DE SOFTWARE: FACTORES DETERMINANTES E INDICADORES
 PRODUCTIVIDAD DE PROYECTOS DE DESARROLLO DE SOFTWARE: FACTORES DETERMINANTES E INDICADORES Raúl Palma G. y Guillermo Bustos R. Escuela de Ingeniería Industrial Universidad Católica de Valparaíso Casilla
PRODUCTIVIDAD DE PROYECTOS DE DESARROLLO DE SOFTWARE: FACTORES DETERMINANTES E INDICADORES Raúl Palma G. y Guillermo Bustos R. Escuela de Ingeniería Industrial Universidad Católica de Valparaíso Casilla
MCBtec Mas información en
 MCBtec Mas información en www.mcbtec.com INTRODUCCIÓN A LA SIMULACION POR ORDENADOR Indice: Objetivo de este texto. Simulación por ordenador. Dinámica y simulación. Ejemplo disparo de un proyectil. Ejemplo
MCBtec Mas información en www.mcbtec.com INTRODUCCIÓN A LA SIMULACION POR ORDENADOR Indice: Objetivo de este texto. Simulación por ordenador. Dinámica y simulación. Ejemplo disparo de un proyectil. Ejemplo
MEDICION DEL TRABAJO
 MEDICION DEL TRABAJO Habíamos dicho al comenzar el curso que habían 4 técnicas que permiten realizar una medición del trabajo 1 Técnicas Directas: - Estudio de tiempos con cronómetro - Muestreo del trabajo
MEDICION DEL TRABAJO Habíamos dicho al comenzar el curso que habían 4 técnicas que permiten realizar una medición del trabajo 1 Técnicas Directas: - Estudio de tiempos con cronómetro - Muestreo del trabajo
Encuentran nuevas propiedades ópticas que podrían revolucionar el mundo de la tecnología
 Encuentran nuevas propiedades ópticas que podrían revolucionar el mundo de la tecnología Por Verenise Sánchez Ciudad de México. 18 de mayo de 2016 (Agencia Informativa Conacyt).- Israel de León Arizpe,
Encuentran nuevas propiedades ópticas que podrían revolucionar el mundo de la tecnología Por Verenise Sánchez Ciudad de México. 18 de mayo de 2016 (Agencia Informativa Conacyt).- Israel de León Arizpe,
CAPITULO 4 JUSTIFICACION DEL ESTUDIO. En este capítulo se presenta la justificación del estudio, supuestos y limitaciones de
 CAPITULO 4 JUSTIFICACION DEL ESTUDIO En este capítulo se presenta la justificación del estudio, supuestos y limitaciones de estudios previos y los alcances que justifican el presente estudio. 4.1. Justificación.
CAPITULO 4 JUSTIFICACION DEL ESTUDIO En este capítulo se presenta la justificación del estudio, supuestos y limitaciones de estudios previos y los alcances que justifican el presente estudio. 4.1. Justificación.
Probabilidades y Estadística (Computación) Facultad de Ciencias Exactas y Naturales Universidad de Buenos Aires Ana M. Bianco y Elena J.
 Facultad de Ciencias Exactas y Naturales Universidad de Buenos Aires Ana M. Bianco y Elena J.") Generación de Números Aleatorios Números elegidos al azar son útiles en diversas aplicaciones, entre las cuáles podemos mencionar: Simulación o métodos de Monte Carlo: se simula un proceso natural en forma
Generación de Números Aleatorios Números elegidos al azar son útiles en diversas aplicaciones, entre las cuáles podemos mencionar: Simulación o métodos de Monte Carlo: se simula un proceso natural en forma
Capítulo 10. Estudio de un caso con parámetros reales: acuífero de Borden
 Capítulo 10. Estudio de un caso con parámetros reales: acuífero de Borden Tras la realización de muchos casos sintéticos y un estudio detallado de todos los parámetros que intervienen en el problema y
Capítulo 10. Estudio de un caso con parámetros reales: acuífero de Borden Tras la realización de muchos casos sintéticos y un estudio detallado de todos los parámetros que intervienen en el problema y
Una vez descrita la constitución general de un robot, podemos empezar con la
 CAPÍTULO 2 Construcción y Mecanismo de Operación del Brazo Robótico Una vez descrita la constitución general de un robot, podemos empezar con la descripción de nuestro robot, cómo fue construido y cómo
CAPÍTULO 2 Construcción y Mecanismo de Operación del Brazo Robótico Una vez descrita la constitución general de un robot, podemos empezar con la descripción de nuestro robot, cómo fue construido y cómo
Estándares para planes de calidad de software. Escuela de Ingeniería de Sistemas y Computación Desarrollo de Software II Agosto Diciembre 2008
 Estándares para planes de calidad de software Escuela de Ingeniería de Sistemas y Computación Desarrollo de Software II Agosto Diciembre 2008 DIFERENCIA ENTRE PRODUCIR UNA FUNCION Y PRODUCIR UNA FUNCION
Estándares para planes de calidad de software Escuela de Ingeniería de Sistemas y Computación Desarrollo de Software II Agosto Diciembre 2008 DIFERENCIA ENTRE PRODUCIR UNA FUNCION Y PRODUCIR UNA FUNCION
4 Teoría de diseño de Experimentos
 4 Teoría de diseño de Experimentos 4.1 Introducción En los capítulos anteriores se habló de PLC y de ruido, debido a la inquietud por saber si en una instalación eléctrica casera que cuente con el servicio
4 Teoría de diseño de Experimentos 4.1 Introducción En los capítulos anteriores se habló de PLC y de ruido, debido a la inquietud por saber si en una instalación eléctrica casera que cuente con el servicio
Capítulo 5. Cliente-Servidor.
 Capítulo 5. Cliente-Servidor. 5.1 Introducción En este capítulo hablaremos acerca de la arquitectura Cliente-Servidor, ya que para nuestra aplicación utilizamos ésta arquitectura al convertir en un servidor
Capítulo 5. Cliente-Servidor. 5.1 Introducción En este capítulo hablaremos acerca de la arquitectura Cliente-Servidor, ya que para nuestra aplicación utilizamos ésta arquitectura al convertir en un servidor
Operación de Microsoft Excel
 Representación gráfica de datos Generalidades Excel puede crear gráficos a partir de datos previamente seleccionados en una hoja de cálculo. El usuario puede incrustar un gráfico en una hoja de cálculo,
Representación gráfica de datos Generalidades Excel puede crear gráficos a partir de datos previamente seleccionados en una hoja de cálculo. El usuario puede incrustar un gráfico en una hoja de cálculo,
Figura 1. Símbolo que representa una ALU. El sentido y la funcionalidad de las señales de la ALU de la Figura 1 es el siguiente:
 Departamento de Ingeniería de Sistemas Facultad de Ingeniería Universidad de Antioquia Arquitectura de Computadores y Laboratorio ISI355 (2011 2) Práctica No. 1 Diseño e implementación de una unidad aritmético
Departamento de Ingeniería de Sistemas Facultad de Ingeniería Universidad de Antioquia Arquitectura de Computadores y Laboratorio ISI355 (2011 2) Práctica No. 1 Diseño e implementación de una unidad aritmético
capitulo3 MARCO TEÓRICO Para el diseño de la reubicación de los procesos se hará uso de la Planeación
 capitulo3 MARCO TEÓRICO Para el diseño de la reubicación de los procesos se hará uso de la Planeación Sistemática de Layout, SLP por sus siglas en inglés. Se hará uso de la simulación para comparar el
capitulo3 MARCO TEÓRICO Para el diseño de la reubicación de los procesos se hará uso de la Planeación Sistemática de Layout, SLP por sus siglas en inglés. Se hará uso de la simulación para comparar el
PRÁCTICA Nº 4: SIMULACIÓN DE CIRCUITOS EN RÉGIMEN TRANSITORIO Y CORRIENTE ALTERNA
 PRÁCTICA Nº 4: SIMULACIÓN DE CIRCUITOS EN RÉGIMEN TRANSITORIO Y CORRIENTE ALTERNA 4.1. Medidas con el osciloscopio El osciloscopio es un instrumento que sirve para visualizar señales periódicas. Nos permite,
PRÁCTICA Nº 4: SIMULACIÓN DE CIRCUITOS EN RÉGIMEN TRANSITORIO Y CORRIENTE ALTERNA 4.1. Medidas con el osciloscopio El osciloscopio es un instrumento que sirve para visualizar señales periódicas. Nos permite,
Como utilizar un servo motor con Arduino.
 Como utilizar un servo motor con Arduino. Revisión Diciembre 2009 Desarrollada por: Christopher Thompson cthompson@olimex.cl Revisada por: Paul Aguayo paguayo@olimex.cl 2 1 Introducción Arduino es una
Como utilizar un servo motor con Arduino. Revisión Diciembre 2009 Desarrollada por: Christopher Thompson cthompson@olimex.cl Revisada por: Paul Aguayo paguayo@olimex.cl 2 1 Introducción Arduino es una
Estacionalidad. Series de tiempo. Modelos econométricos. Modelos econométricos. Q= T Kα Lβ
 Estacionalidad Qué es la estacionalidad? La estacionalidad es una componente que se presenta en series de frecuencia inferior a la anual (mensual, trimestral,...), y supone oscilaciones a corto plazo de
Estacionalidad Qué es la estacionalidad? La estacionalidad es una componente que se presenta en series de frecuencia inferior a la anual (mensual, trimestral,...), y supone oscilaciones a corto plazo de
INTRODUCCION A LA PROGRAMACION DE PLC
 INTRODUCCION A LA PROGRAMACION DE PLC Esta guía se utilizará para estudiar la estructura general de programación de um PLC Instrucciones y Programas Una instrucción u orden de trabajo consta de dos partes
INTRODUCCION A LA PROGRAMACION DE PLC Esta guía se utilizará para estudiar la estructura general de programación de um PLC Instrucciones y Programas Una instrucción u orden de trabajo consta de dos partes
Tema 3. Medidas de tendencia central. 3.1. Introducción. Contenido
 Tema 3 Medidas de tendencia central Contenido 31 Introducción 1 32 Media aritmética 2 33 Media ponderada 3 34 Media geométrica 4 35 Mediana 5 351 Cálculo de la mediana para datos agrupados 5 36 Moda 6
Tema 3 Medidas de tendencia central Contenido 31 Introducción 1 32 Media aritmética 2 33 Media ponderada 3 34 Media geométrica 4 35 Mediana 5 351 Cálculo de la mediana para datos agrupados 5 36 Moda 6
La Instrumentación Tradicional:
 Prof. Ing. Juan Suárez JTP. Ing. Guillermo Murcia ATP. Ing. Jorge Strack jsuarez@fi.mdp.edu.ar gjmurcia@fi.mdp.edu.ar jlstrack@fi.mdp.edu.ar La Instrumentación Tradicional: Cuando se habla de instrumentos
Prof. Ing. Juan Suárez JTP. Ing. Guillermo Murcia ATP. Ing. Jorge Strack jsuarez@fi.mdp.edu.ar gjmurcia@fi.mdp.edu.ar jlstrack@fi.mdp.edu.ar La Instrumentación Tradicional: Cuando se habla de instrumentos
Procesamiento Analógico de Señales
 Procesamiento Analógico de Señales Departamento de Electrónica y Automática Facultad de Ingeniería Análisis de AC en SIMetrix Andrés Lage Angel Veca Mario Ruiz Edición 2013 Análisis de AC en SIMetrix Una
Procesamiento Analógico de Señales Departamento de Electrónica y Automática Facultad de Ingeniería Análisis de AC en SIMetrix Andrés Lage Angel Veca Mario Ruiz Edición 2013 Análisis de AC en SIMetrix Una
Fig 4-7 Curva característica de un inversor real
 Clase 15: Criterios de Comparación de Familias Lógicas. Características del Inversor Real Cuando comenzamos a trabajar con un inversor real comienzan a aparecer algunos inconvenientes que no teníamos en
Clase 15: Criterios de Comparación de Familias Lógicas. Características del Inversor Real Cuando comenzamos a trabajar con un inversor real comienzan a aparecer algunos inconvenientes que no teníamos en
SISTEMA MONOFÁSICO Y TRIFÁSICO DE C.A Unidad 1 Magnetismo, electromagnetismo e Inducción electromagnética.
 SISTEMA MONOFÁSICO Y TRIFÁSICO DE C.A Unidad 1 Magnetismo, electromagnetismo e Inducción electromagnética. A diferencia de los sistemas monofásicos de C.A., estudiados hasta ahora, que utilizan dos conductores
SISTEMA MONOFÁSICO Y TRIFÁSICO DE C.A Unidad 1 Magnetismo, electromagnetismo e Inducción electromagnética. A diferencia de los sistemas monofásicos de C.A., estudiados hasta ahora, que utilizan dos conductores
Análisis de Resultados
 Análisis de Resultados Encuesta Web OnLine Buses: www.encuesta-webonlinebuses.tk Grupo10 1 Datos Generales Técnica: Encuesta Web Medio: Google Forms Unidad de muestreo: Usuarios y potenciales usuarios
Análisis de Resultados Encuesta Web OnLine Buses: www.encuesta-webonlinebuses.tk Grupo10 1 Datos Generales Técnica: Encuesta Web Medio: Google Forms Unidad de muestreo: Usuarios y potenciales usuarios
CONTROL DE VELOCIDAD PARA UN MOTOR SRM UTILIZANDO SISTEMAS DE SIMULACIÓN INTERACTIVA Y PROTOTIPADO RÁPIDO
 CONTROL DE VELOCIDAD PARA UN MOTOR SRM UTILIZANDO SISTEMAS DE SIMULACIÓN INTERACTIVA Y PROTOTIPADO RÁPIDO Juan Antonio Espinar Romero Ingeniería técnica industrial especialidad en electricidad EPSEVG,
CONTROL DE VELOCIDAD PARA UN MOTOR SRM UTILIZANDO SISTEMAS DE SIMULACIÓN INTERACTIVA Y PROTOTIPADO RÁPIDO Juan Antonio Espinar Romero Ingeniería técnica industrial especialidad en electricidad EPSEVG,
PRÁCTICA NÚMERO 1. MANEJO DEL OSCILOSCOPIO Y DEL GENERADOR DE SEÑALES.
 PRÁCTICA NÚMERO 1. MANEJO DEL OSCILOSCOPIO Y DEL GENERADOR DE SEÑALES. 1.1. Introducción Teórica. (a) El osciloscopio El osciloscopio es básicamente un dispositivo de visualización gráfica que muestra
PRÁCTICA NÚMERO 1. MANEJO DEL OSCILOSCOPIO Y DEL GENERADOR DE SEÑALES. 1.1. Introducción Teórica. (a) El osciloscopio El osciloscopio es básicamente un dispositivo de visualización gráfica que muestra
INTRODUCCIÓN: LA FÍSICA Y SU LENGUAJE, LAS MATEMÁTICAS
 INTRODUCCIÓN: LA FÍSICA Y SU LENGUAJE, LAS MATEMÁTICAS La física es la más fundamental de las ciencias que tratan de estudiar la naturaleza. Esta ciencia estudia aspectos tan básicos como el movimiento,
INTRODUCCIÓN: LA FÍSICA Y SU LENGUAJE, LAS MATEMÁTICAS La física es la más fundamental de las ciencias que tratan de estudiar la naturaleza. Esta ciencia estudia aspectos tan básicos como el movimiento,
Movimiento a través de una. José San Martín
 Movimiento a través de una curva José San Martín 1. Introducción Una vez definida la curva sobre la cual queremos movernos, el siguiente paso es definir ese movimiento. Este movimiento se realiza mediante
Movimiento a través de una curva José San Martín 1. Introducción Una vez definida la curva sobre la cual queremos movernos, el siguiente paso es definir ese movimiento. Este movimiento se realiza mediante
Análisis de medidas conjuntas (conjoint analysis)
") Análisis de medidas conuntas (conoint analysis). Introducción Como ya hemos dicho anteriormente, esta técnica de análisis nos sirve para analizar la importancia que dan los consumidores a cada uno de los
Análisis de medidas conuntas (conoint analysis). Introducción Como ya hemos dicho anteriormente, esta técnica de análisis nos sirve para analizar la importancia que dan los consumidores a cada uno de los
Medidas de la tensión de salida en variadores de velocidad con osciloscopios digitales ScopeMeter Serie 190 de Fluke
 Aplicación Medidas de la tensión de salida en variadores de velocidad con osciloscopios digitales ScopeMeter Serie 190 de Fluke Por Viditec La utilización de variadores de velocidad o "inversores de frecuencia"
Aplicación Medidas de la tensión de salida en variadores de velocidad con osciloscopios digitales ScopeMeter Serie 190 de Fluke Por Viditec La utilización de variadores de velocidad o "inversores de frecuencia"
Datos estadísticos. 1.3. PRESENTACIÓN DE DATOS INDIVIDUALES Y DATOS AGRUPADOS EN TABLAS Y GRÁFICOS
 .. PRESENTACIÓN DE DATOS INDIVIDUALES Y DATOS AGRUPADOS EN TABLAS Y GRÁFICOS Ser: Describir el método de construcción del diagrama de tallo, tabla de frecuencias, histograma y polígono. Hacer: Construir
.. PRESENTACIÓN DE DATOS INDIVIDUALES Y DATOS AGRUPADOS EN TABLAS Y GRÁFICOS Ser: Describir el método de construcción del diagrama de tallo, tabla de frecuencias, histograma y polígono. Hacer: Construir
SERIES DE TIEMPO INTRODUCCIÓN
 Clase Nº 5 SERIES DE TIEMPO INTRODUCCIÓN La forma más utilizada para el análisis de las tendencias futuras es realizar pronósticos. La función de un pronóstico de demanda de un bien, por ejemplo ventas
Clase Nº 5 SERIES DE TIEMPO INTRODUCCIÓN La forma más utilizada para el análisis de las tendencias futuras es realizar pronósticos. La función de un pronóstico de demanda de un bien, por ejemplo ventas
Para calcular el Ranking de nadadores, seleccionaremos la opción desde el menú de Ranking, opción Cálculo. Obtendremos la siguiente pantalla:
 Cálculo 38 SECCIÓN 7 CAPÍTULO 38 RANKING CÁLCULO Cálculo. Para calcular el Ranking de nadadores, seleccionaremos la opción desde el menú de Ranking, opción Cálculo. Obtendremos la siguiente pantalla:
Cálculo 38 SECCIÓN 7 CAPÍTULO 38 RANKING CÁLCULO Cálculo. Para calcular el Ranking de nadadores, seleccionaremos la opción desde el menú de Ranking, opción Cálculo. Obtendremos la siguiente pantalla:
CAPÍTULO 6 SIMULACIONES Y RESULTADOS
 CAPÍTULO 6 SIMULACIONES Y RESULTADOS 6.1 Proceso de Simulación Las simulaciones fueros llevadas a cabo empleando como herramienta la Versión 6.5 Release 13 de Matlab. Para lo cual fue empleado un banco
CAPÍTULO 6 SIMULACIONES Y RESULTADOS 6.1 Proceso de Simulación Las simulaciones fueros llevadas a cabo empleando como herramienta la Versión 6.5 Release 13 de Matlab. Para lo cual fue empleado un banco
CAPÍTULO 3. HERRAMIENTA DE SOFTWARE DE PLANEACIÓN DE
 CAPÍTULO 3. HERRAMIENTA DE SOFTWARE DE PLANEACIÓN DE INVENTARIO Y PROCESO Objetivos del capítulo Desarrollar una herramienta de software de planeación de inventario con los datos obtenidos del capítulo
CAPÍTULO 3. HERRAMIENTA DE SOFTWARE DE PLANEACIÓN DE INVENTARIO Y PROCESO Objetivos del capítulo Desarrollar una herramienta de software de planeación de inventario con los datos obtenidos del capítulo
Instrumentos y aparatos de medida: Medida de intensidad, tensión y resistencia
 Instrumentos y aparatos de medida: Medida de intensidad, tensión y resistencia Podemos decir que en electricidad y electrónica las medidas que con mayor frecuencia se hacen son de intensidad, tensión y
Instrumentos y aparatos de medida: Medida de intensidad, tensión y resistencia Podemos decir que en electricidad y electrónica las medidas que con mayor frecuencia se hacen son de intensidad, tensión y
8. CONCLUSIONES Y RECOMENDACIONES
 8. CONCLUSIONES Y RECOMENDACIONES 8.1 Conclusiones En el proyecto de tesis Realización de software educativo para simular la dispersión de contaminantes atmosféricos se desarrolló un programa computacional
8. CONCLUSIONES Y RECOMENDACIONES 8.1 Conclusiones En el proyecto de tesis Realización de software educativo para simular la dispersión de contaminantes atmosféricos se desarrolló un programa computacional
PROCEDIMIENTO PARA PRUEBAS DE VALIDACION DE MODELOS MATEMATICOS DE UNIDADES GENERADORAS
 PROCEDIMIENTO PARA PRUEBAS DE VALIDACION DE MODELOS MATEMATICOS DE UNIDADES GENERADORAS 1. OBJETIVO Verificar la validez del modelo matemático de los sistema de control de las unidades generadoras del
PROCEDIMIENTO PARA PRUEBAS DE VALIDACION DE MODELOS MATEMATICOS DE UNIDADES GENERADORAS 1. OBJETIVO Verificar la validez del modelo matemático de los sistema de control de las unidades generadoras del
Circuitos RLC resonantes acoplados
 Pág. 1 Circuitos RLC resonantes acoplados Cano, Ramiro Díaz, Federico Trebisacce, Carlos cramirocano@.com.ar Facil7@hotmail.com trevicjt@hotmail.com Universidad Favaloro, Facultad de Ingeniería Bs. As.
Pág. 1 Circuitos RLC resonantes acoplados Cano, Ramiro Díaz, Federico Trebisacce, Carlos cramirocano@.com.ar Facil7@hotmail.com trevicjt@hotmail.com Universidad Favaloro, Facultad de Ingeniería Bs. As.
Ejercicio de estadística para 3º de la ESO
 Ejercicio de estadística para 3º de la ESO Unibelia La estadística es una disciplina técnica que se apoya en las matemáticas y que tiene como objetivo la interpretación de la realidad de una población
Ejercicio de estadística para 3º de la ESO Unibelia La estadística es una disciplina técnica que se apoya en las matemáticas y que tiene como objetivo la interpretación de la realidad de una población