Sistemas Robóticos Móviles
|
|
|
- Monica Farías Lozano
- hace 8 años
- Vistas:
Transcripción
1 Sistemas Robóticos Móviles (Práctica 7: Planificación de Trayectorias) Antonio Falcón Martel Facultad de Informática Universidad de Las Palmas de Gran Canaria

2 Objetivos La práctica 7 se desarrollará en utilizando el simulador en MATLAB SIMROBOT (Autonomous Mobile Robotics Toolbox) desarrollado en la Universidad de Brno (república de Chequia). Los objetivos principales son: Familiarizarse con el entorno de simulación Analizar las diferentes estrategias posibles sobre un problema de planificación global Desarrollar estrategias para el control reactivo local en el caso de coexistir múltiples robots móviles en el mismo entorno.

3 Autonomous Mobile Robotics Toolbox La toolbox Autonomous mobile robotics SIMROBOT (SIMulated ROBOTs) permite: Simular comportamientos de uno o mas robots en movimiento en un entorno virtual. Cada robot puede estar equipado con varios sensores ultrasónicos y láser que pueden utilizarse para algoritmos de control (pueden combinarse con Lógica Difusa y Redes Neuronales) La toolbox incluye dos aplicaciones independientes: El EDITOR que permite crear y modificar la simulación, crear mapa, definir robots y editar sus algoritmos de control. El SIMULADOR que permite ejecutar la simulación donde cada robot se desplaza según su propio algoritmos de control.
 La toolbox incluye dos aplicaciones independientes: El EDITOR que permite crear y modificar la simulación, crear mapa, definir robots y editar")
4 Autonomous Mobile Robotics Toolbox Simulator Window

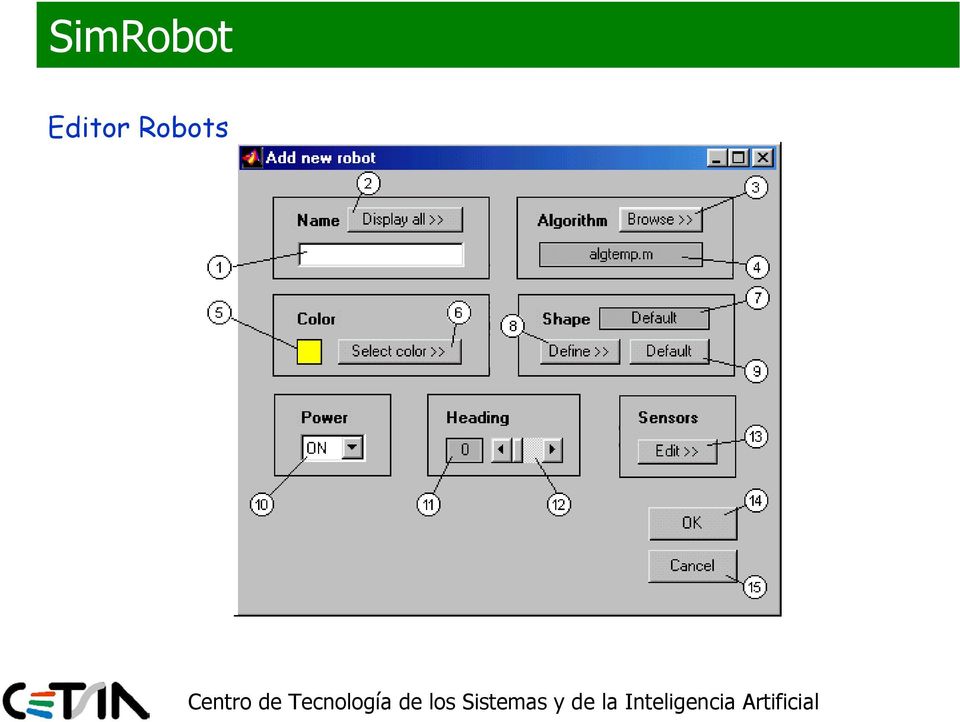
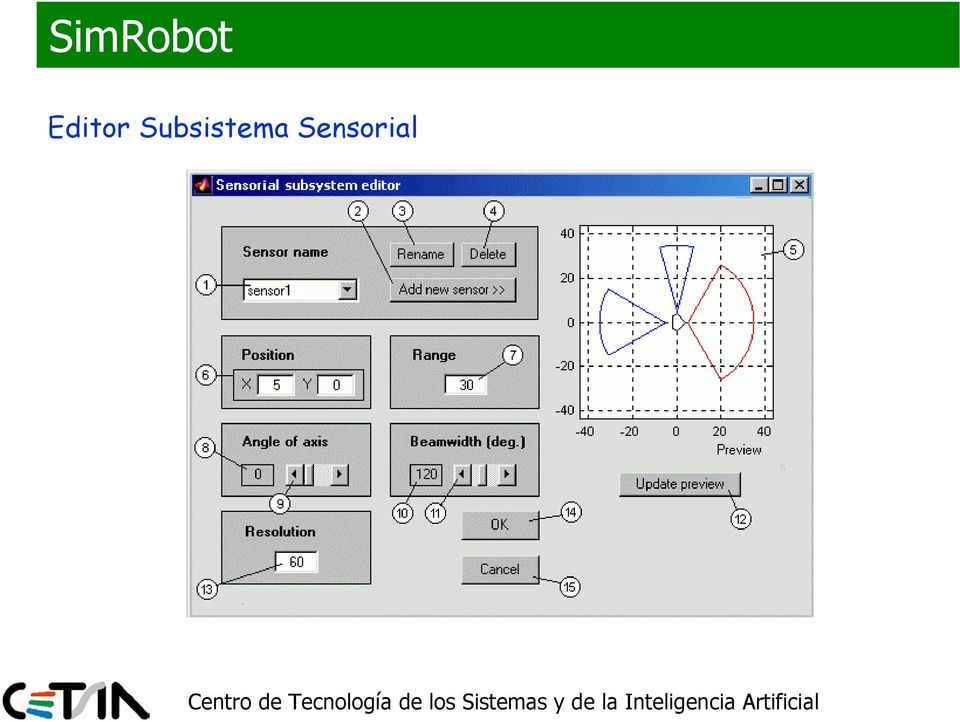
5 SIMROBOT: Características Características relevantes de la TOOLBOX Edición y simulación Menu de contexto para los robots Editor para el subsistema sensorial de cada robot (tipo, número, posición y parámetros) Edición de algoritmos de control como m-functions que pueden utilizar otras toolbox de MATLAB Soporta simulación paso a paso y detección de colisiones Cada robot tiene una memoria disponible para el usuario.

6 SIMROBOT Notas de interés: El entorno virtual de simulación se representa como una matriz, que puede crearse desde ficheros bitmap de 1-bit (*.bmp) Los robot admiten sensores ultrasónicos y láser para evaluar distancias cortas y largas. Están simulados utilizando el algoritmo de Bresenham (este algoritmo está escrito en C y compilado en una DLL un fichero mex- para una ejecución más rápida) El simulador asume que los robots tienen dos ruedas motrices y una o dos ruedas tipo castor (conducción diferencial). Este tipo de plataforma tiene dos grados de libertad para la locomoción.
 El simulador asume que los robots tienen dos ruedas motrices y una o dos ruedas tipo castor (conducción diferencial).")
7 SIMROBOT Programación Orientada a Objetos

8 SIMROBOT: Detalles de la Estructura name - user-defined name of the robot number - unique ID number af - control algorithm file name scale - scale of the robot - size of the robot can be adjusted without new shape definition position - actual position of the robot in virtual environment map heading - heading of the robot (in degrees) userdata - this is the robot s "memory" and any user data can be stored here crashed - flag, set when a collision is detected power - on/off switch flag color - color of the robot ([R G B] vector)

9 SIMROBOT: Detalles de la Estructura patch - data for a patch (polygon) visually representing the robot xdata - data of x-coordinates for the patch definition ydata - data of y-coordinates for the patch definition history - record of position and heading data of the robot in each simulation step velocity - angular velocity of left and right actuated wheel accel - angular acceleration of left and right actuated wheel sensors - structure defining sensorial subsystem of the robot (sensor data = position on the robot, angle of axis, beamwidth (in degrees), range, sensor name)
,")
10 Autonomous Mobile Robotics Toolbox Mapa Virtual del Entorno El mapa se representa internamente como una matriz de uint8 (unsigned 8-bit integer). El valor máximo de cada elemento es 255 según: empty space solid obstacle robot Se deberá rodear al mapa de una pared limitadora pues se admite la opción de que los robots pueden salir de este..

11 Autonomous Mobile Robotics Toolbox Sistema de Coordenadas La posición básica para el robot es con orientación de la cabecera = 0 Los sensores se definen sobre esta posición La unidad básica de longitud es un centímetro Un punto del mapa (un elemento de la matriz) viene representado por un centímetro cuadrado en el entorno del mundo real
 viene representado por un centímetro cuadrado en el entorno")
12 Autonomous Mobile Robotics Toolbox Modelo cinemático (directo e inverso) Se asume una plataforma diferencial con dos grados de libertad (DOFs): traslación y rotación. Velocidad traslacional en [m.s-1] = W W a a b b a B B B l l l l l R v v z y x ω ω ω Velocidad rotacional(z) [rad.s-1] ( ) + = z y x B B B a b b a a b b a a W W v v l l l l l l l l R l ω ω ω Velocidad rotación de las ruedas en [rad.s-1]
![s-1] = 2 1 1 1 2 W W a a b b a B B B l l l l l R v v z y x ω ω ω Velocidad rotacional(z) [rad.](/docs-images/44/8298336/images/page_12.jpg "s-1] ( ) + = z y x B B B a b b a a b b a a W W v v l l l l l l l l R l ω ω ω 1 1 1 1 2 2 2 2 1 Velocidad")
13 Autonomous Mobile Robotics Toolbox Variables y parámetros La solución de la ecuación anterior se implementa con una m-function denominada mmodel.m. Las constantes l a,l b y R deben establecerse de acuerdo con las proporciones del robot. Los valores implícitos son l a =3 cm, l b =0 cm y R=1 cm. Se deberá guardar consistencia con los valores que se utilicen en la función de cinemática inversa invmodel.m. Un paso de simulación representa un segundo en tiempo real.

14 SimRobot Editor Robots
15 SimRobot Editor Subsistema Sensorial
16 SimRobot Algoritmos de Control Los algoritmos de control son m-functions estandar de MATLAB. Cada robot tiene un algoritmo que puede ser compartido por varios robots. Cuando un nuevo robot se crea se le añade un algoritmo por defecto (algtemp.m),que se enceuntra vacio: function new = alg_name(simrobot,matrix,step) % your algorithm starts here %end of your algorithm new = simrobot;
,que se enceuntra vacio: function new = alg_name(simrobot,matrix,step) % your algorithm")
17 SimRobot Algoritmos de Control La variable step es el paso de simulación actual y puede utilizarse dentro del algoritmo. Para el algoritmo de control pueden también utilizarse los comandos de SimRobot. % sensor reading [dist,num] = readusonic(simrobot,'sens1',matrix); % num, the nearest obstacle number, is not used if dist<20 simrobot = setvel(simrobot,[0 0.5]); % turn left else simrobot = setvel(simrobot,[ ]); % go straight on end
![% sensor reading [dist,num] = readusonic(simrobot,'sens1',matrix); % num, the nearest obstacle number, is not](/docs-images/44/8298336/images/page_17.jpg "used if dist<20 simrobot = setvel(simrobot,[0 0.5]); % turn left else simrobot = setvel(simrobot,[0.5 0.")
18 SimRobot : Comandos prestablecidos Comando: clearcf Propósito: borrar el crash-flag del robot. Sintáxis: new = clearcf(simrobot) Comando: getaccel/setaccel Propósito : Porporciona/pone la aceleración angular de las ruedas derecha e izquierda. Sintáxis: [left_accel,right_accel] = getaccel(simrobot) new = setaccel(simrobot,[left_accel right_accel]) Devuelve un vector de dos elementos (double).
 new = setaccel(simrobot,[left_accel")
19 SimRobot : Comandos prestablecidos Comando: gethead/sethead Purpose: Returns/sets the heading of the robot. Sintáxis: heading = gethead(simrobot) new = sethead(simrobot,name) El valor que devuelve está en grados. El ángulo de 0 se retorna cuando el robot encara el este."name" puede ser cualquier string Comando: getname Propósito: Devuelve el nombre del robot. Sintáxis: name = getname(simrobot) name es el nombre del robot (string).

20 SimRobot : Comandos prestablecidos Comando: getpos Propósito: Devuelve la posición actual del robot. Sintáxis: position = getpos(simrobot) El valor que se obtiene es la posición actual del robot ([x y], double). La esquina izquierda del mundo virtual tiene como coordenadas [0,0] Comando: getpower/setpower Propósito: Retorna/pone el "power switch state" del robot (el robot está activo/no activo). Sintáxis: power = getpower(simrobot) new = setpower(simrobot,power) El valor del estado de energía del robot (boolean/double), "power" puede ser 0/1 o 'on'/'off'.
![La esquina izquierda del mundo virtual tiene como coordenadas [0,0] Comando: getpower/setpower Propósito: Retorna/pone el "power switch](/docs-images/44/8298336/images/page_20.jpg "state\" del robot (el robot está activo/no activo).")
21 SimRobot : Comandos prestablecidos Comando: getvel/setvel Propósito: Devuelve/pone las velocidades <ngulares de las ruedas derecha e izquierda. Sintáxis: [left_vel,right_vel] = getvel(simrobot) new = setvel(simrobot,[left_vel right_vel]) El valor que se devuelve es un vector de dos elementos (double). Comando: invmodel Propósito: Representa el modelo de cinemática inversa. Sintáxis: [left_angular_vel,right_angular_vel] = invmodel(movspd, rotspd) Donde: left_angular_vel,right_angular_vel son las velocidades angulares de las ruedas, movspd es la velocidad traslacional del cerpo del robot y rotspd es la velocidad rotacional
22 SimRobot : Comandos prestablecidos Comando: iscrashed Propósito: Devuelve el crash-flag. Sintáxis: flag = iscrashed(simrobot) Si el robot se colapsa por colisión, se devuelve un 1, y en cualquier otro caso un 0. Comando: getnum Propósito: Devuelve el número de identificación ID del robot. Sintáxis: number = getnum(simrobot) E valor del ID del robot es double, pero entero.
23 SimRobot : Comandos prestablecidos Comando: readlaser Propósito: Leer los datos desde un scanner láser. Sintáxis: [data,num] = readlaser(simrobot,sensor_name,matrix) Donde: data es un vector que contiene las distancias a los obstáculos medidos por un haz dado. Los haces se len en sentido de las agujas del reloj num es el número de los obstáculos detectados (1 para los obstáculos sólidos (the "wall"), otros números para los robots. Si no hay obstáculos se devuelve un 0), sensor_name es el nombre del sensor. matrix es la matriz que representa el entorno virtual.
24 SimRobot : Comandos prestablecidos Comando: readusonic Propósito: Simula las lecturas desde un sensor ultrasónico. Sintáxis: [distance,num] = readusonic(simrobot,sensor_name,matrix) Donde distance es la distancia al obstáculo más próximo. num es el número de los obstáculos detectados (1 para los obstáculos sólidos (the "wall"), otros números para los robots. Si no hay obstáculos se devuelve un 0), matrix es la matriz que representa el entorno virtual.
25 SimRobot : Comandos prestablecidos Comando: readmem/writemem Propósito: Lee/escribe la memoria del robot. Sintáxis: data = readmem(simrobot) new = writemem(simrobot,data) Donde data es el contenido de la memoria que se lee/escribe.
26 Práctica 7: (Planificación de trayectorias en sistemas multirobots) a) Utilizando MATLAB y SIMROBOT diseñar un robot que permita ir del punto A al B del laberinto de la figura, incluyendo aquellos sensores que se estimen oportunos. A B
27 Práctica 7: (Planificación de trayectorias en sistemas multirobots) b) Definir el algoritmo de control que permita realizar la planificación local y global. c) El robot coexistirá con otros robots en el entorno que llevan otros objetivos finales (ir de B a A). Si se produce algún tipo de colisión identificar si esta es con un robot en movimiento. A B
28 Práctica 7: (Materiales y Documentación) Material: a) MATLAB 5.3 (toolbox: Fuzzy Systems, Neural Networks, SIMULINK) b) Toolbox SimRobot c) PC WinXX d) El entorno virtual de trabajo: Laberinto.bmp (páginas asignatura) Recursos On-line: a) SimRobot: b) Manuales MATLAB&SIMULINK: Referencias de interés: a) [Mur00] Murphy R., "Introduction to AI Robotics", MIT Press, b) [Pru96] Pruski, A. "Robotique Mobile. La Planification de Trajectorie", Hermes,
29 ! Hasta la Próxima
Manual de Introducción a SIMULINK
 Manual de Introducción a SIMULINK Autor: José Ángel Acosta Rodríguez 2004 Capítulo Ejemplo.. Modelado de un sistema dinámico En este ejemplo se realizará el modelado de un sistema dinámico muy sencillo.
Manual de Introducción a SIMULINK Autor: José Ángel Acosta Rodríguez 2004 Capítulo Ejemplo.. Modelado de un sistema dinámico En este ejemplo se realizará el modelado de un sistema dinámico muy sencillo.
Nombre de la asignatura: Robótica Industrial. Carrera: Ingeniería Electrónica
 1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Robótica Industrial Carrera: Ingeniería Electrónica Clave de la asignatura: Horas teoría - horas práctica créditos: 3 2 8 2.- HISTORIA DEL PROGRAMA Lugar
1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Robótica Industrial Carrera: Ingeniería Electrónica Clave de la asignatura: Horas teoría - horas práctica créditos: 3 2 8 2.- HISTORIA DEL PROGRAMA Lugar
Práctica 1 - Pista de Carreras 12407 - Programación II
 1. Introducción Práctica 1 - Pista de Carreras 12407 - Programación II En esta práctica el objetivo es implementar una matriz de adyacencia para el juego Pista de Carreras. Con tal fin, primero hay que
1. Introducción Práctica 1 - Pista de Carreras 12407 - Programación II En esta práctica el objetivo es implementar una matriz de adyacencia para el juego Pista de Carreras. Con tal fin, primero hay que
Introducción a la Programación en MATLAB
 Introducción a la Programación en MATLAB La programación en MATLAB se realiza básicamente sobre archivos M, o M-Files. Se los denomina de esta forma debido a su extensión.m. Estos archivos son simple archivos
Introducción a la Programación en MATLAB La programación en MATLAB se realiza básicamente sobre archivos M, o M-Files. Se los denomina de esta forma debido a su extensión.m. Estos archivos son simple archivos
INTELIGENCIA ARTIFICIAL 2015 TALLER RÁPIDO DE PROGRAMACIÓN EN JAVA
 INTELIGENCIA ARTIFICIAL 2015 TALLER RÁPIDO DE PROGRAMACIÓN EN JAVA Fuente: http://www.tiobe.com/index.php/content/paperinfo/tpci/index.html Por qué Java? TIOBE Index for March 2015 Fuente: http://www.tiobe.com/index.php/content/paperinfo/tpci/index.html
INTELIGENCIA ARTIFICIAL 2015 TALLER RÁPIDO DE PROGRAMACIÓN EN JAVA Fuente: http://www.tiobe.com/index.php/content/paperinfo/tpci/index.html Por qué Java? TIOBE Index for March 2015 Fuente: http://www.tiobe.com/index.php/content/paperinfo/tpci/index.html
Introducción a Matlab.
 Introducción a Matlab. Ejercicios básicos de manipulación de imágenes. Departamento de Ingeniería electrónica, Telecomunicación y Automática. Área de Ingeniería de Sistemas y Automática OBJETIVOS: Iniciación
Introducción a Matlab. Ejercicios básicos de manipulación de imágenes. Departamento de Ingeniería electrónica, Telecomunicación y Automática. Área de Ingeniería de Sistemas y Automática OBJETIVOS: Iniciación
SOLUCION EXAMEN junio 2006
 SOLUCION EXAMEN junio 2006 1. Explique razonadamente si las siguientes afirmaciones son verdaderas o falsas: I) (1 p) En UNIX únicamente se distinguen dos tipos de procesos: los procesos de usuario y los
SOLUCION EXAMEN junio 2006 1. Explique razonadamente si las siguientes afirmaciones son verdaderas o falsas: I) (1 p) En UNIX únicamente se distinguen dos tipos de procesos: los procesos de usuario y los
Prof. Dr. Paul Bustamante
 Carné: Nombre: Informática II Fundamentos de Programación Prof. Dr. Paul Bustamante INDICE 1. INTRODUCCIÓN... 1 Pag.1 1.1 EJERCICIO1: CÁLCULO DEL IMC (3.0 PTS.)... 1 1.2 EJERCICIO2: OPERADOR VIRTUAL DE
Carné: Nombre: Informática II Fundamentos de Programación Prof. Dr. Paul Bustamante INDICE 1. INTRODUCCIÓN... 1 Pag.1 1.1 EJERCICIO1: CÁLCULO DEL IMC (3.0 PTS.)... 1 1.2 EJERCICIO2: OPERADOR VIRTUAL DE
Sesión No. 4. Contextualización INFORMÁTICA 1. Nombre: Procesador de Texto
 INFORMÁTICA INFORMÁTICA 1 Sesión No. 4 Nombre: Procesador de Texto Contextualización La semana anterior revisamos los comandos que ofrece Word para el formato del texto, la configuración de la página,
INFORMÁTICA INFORMÁTICA 1 Sesión No. 4 Nombre: Procesador de Texto Contextualización La semana anterior revisamos los comandos que ofrece Word para el formato del texto, la configuración de la página,
Visual Basic 1. Empleo de módulos y Procedimientos. Procedimientos definidos por el usuario
 Empleo de módulos y Procedimientos Procedimientos definidos por el usuario Según lo que hemos visto hasta ahora, Visual Basic, almacena el código en módulos. Hay tres clases de módulos: formularios (.frm),
Empleo de módulos y Procedimientos Procedimientos definidos por el usuario Según lo que hemos visto hasta ahora, Visual Basic, almacena el código en módulos. Hay tres clases de módulos: formularios (.frm),
Introducción a Protégé
 FACULTAD DE INFORMÁTICA LICENCIATURA EN DOCUMENTACIÓN SISTEMAS DE REPRESENTACIÓN Y PROCESAMIENTO AUTOMÁTICO DEL CONOCIMIENTO Práctica 1 1ª Parte Introducción a Protégé Febrero 2003 1. Objetivo La presente
FACULTAD DE INFORMÁTICA LICENCIATURA EN DOCUMENTACIÓN SISTEMAS DE REPRESENTACIÓN Y PROCESAMIENTO AUTOMÁTICO DEL CONOCIMIENTO Práctica 1 1ª Parte Introducción a Protégé Febrero 2003 1. Objetivo La presente
UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO FACULTAD DE INGENIERÍA PROGRAMA DE ESTUDIO
 UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO FACULTAD DE INGENIERÍA PROGRAMA DE ESTUDIO ROBOTS MÓVILES Y AGENTES INTELIGENTES 0756 8º, 9 o 06 Asignatura Clave Semestre Créditos Ingeniería Eléctrica Ingeniería
UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO FACULTAD DE INGENIERÍA PROGRAMA DE ESTUDIO ROBOTS MÓVILES Y AGENTES INTELIGENTES 0756 8º, 9 o 06 Asignatura Clave Semestre Créditos Ingeniería Eléctrica Ingeniería
6 de Mayo Bogotá, Colombia. ni.com/colombia 01 8000 513680 o (1) 482.4888
 482.4888") 6 de Mayo Bogotá, Colombia ni.com/colombia 01 8000 513680 o (1) 482.4888 Diseño y Simulación de Control y Código Matemático con LabVIEW Carlos Pazos Technical Marketing Engineer National Instruments Mexico
6 de Mayo Bogotá, Colombia ni.com/colombia 01 8000 513680 o (1) 482.4888 Diseño y Simulación de Control y Código Matemático con LabVIEW Carlos Pazos Technical Marketing Engineer National Instruments Mexico
Manual básico de Robomid
 Manual básico de Robomid Elaborado por: Daniel Gónzález Índice 1. Introducción a Robomind... 3 2. Uso del programa Robomind 2.6... 7 3. Ejercicios... 9-2- 1. Introducción a Robomind 1.1. Introdución Robo
Manual básico de Robomid Elaborado por: Daniel Gónzález Índice 1. Introducción a Robomind... 3 2. Uso del programa Robomind 2.6... 7 3. Ejercicios... 9-2- 1. Introducción a Robomind 1.1. Introdución Robo
Práctica de la Asignatura Programación III Versión 1.0
 Práctica de la Asignatura Programación III Versión 1.0 Escuela Técnica Superior de Ingeniería Informática UNED Curso 2010-2011 2 1.- ENUNCIADO DE LA PRÁCTICA Un trimino en L es una figura formada por 3
Práctica de la Asignatura Programación III Versión 1.0 Escuela Técnica Superior de Ingeniería Informática UNED Curso 2010-2011 2 1.- ENUNCIADO DE LA PRÁCTICA Un trimino en L es una figura formada por 3
6. SISTEMAS CAD-CAM (CAM) 6.1. CONCEPTO DE CAM
 6.1. CONCEPTO DE CAM") 6.1. CONCEPTO DE CAM Las siglas CAM corresponden al acrónimo de Computer Aided Manufacturing, Fabricación asistida por ordenador. Por CAM se entiende la utilización de ordenadores para tareas técnicas
6.1. CONCEPTO DE CAM Las siglas CAM corresponden al acrónimo de Computer Aided Manufacturing, Fabricación asistida por ordenador. Por CAM se entiende la utilización de ordenadores para tareas técnicas
Práctica 1ª: Introducción a Matlab. 1er curso de Ingeniería Industrial: Ingeniería de Control
 1er curso de Ingeniería Industrial: Ingeniería de Control Práctica 1ª: Introducción a Matlab Departamento de Ingeniería electrónica, Telecomunicación y Automática. Área de Ingeniería de Sistemas y Automática
1er curso de Ingeniería Industrial: Ingeniería de Control Práctica 1ª: Introducción a Matlab Departamento de Ingeniería electrónica, Telecomunicación y Automática. Área de Ingeniería de Sistemas y Automática
Universidad Politécnica de Guanajuato Semana de la Robótica Taller de introducción a la Robótica y Matlab (2 de Octubre de 2012)
") Universidad Politécnica de Guanajuato Semana de la Robótica Taller de introducción a la Robótica y Matlab (2 de Octubre de 2012) Objetivos del curso Revisar conceptos básicos de robótica y el uso inicial
Universidad Politécnica de Guanajuato Semana de la Robótica Taller de introducción a la Robótica y Matlab (2 de Octubre de 2012) Objetivos del curso Revisar conceptos básicos de robótica y el uso inicial
Curso de Java POO: Programación orientada a objetos
 Curso de Java POO: Programación orientada a objetos Luis Guerra Velasco Curso INEM 02830. Programación en Java Marzo 2010 Índice 1 Introducción a la POO 2 Herencia y polimorfismo 3 Empaquetado de proyectos
Curso de Java POO: Programación orientada a objetos Luis Guerra Velasco Curso INEM 02830. Programación en Java Marzo 2010 Índice 1 Introducción a la POO 2 Herencia y polimorfismo 3 Empaquetado de proyectos
Sistemas Conexionistas
 1 Objetivo Sistemas Conexionistas Curso 2011/2012 El objetivo de esta práctica es usar un conjunto de redes de neuronas artificiales para abordar un problema de reconocimiento de figuras sencillas en imágenes
1 Objetivo Sistemas Conexionistas Curso 2011/2012 El objetivo de esta práctica es usar un conjunto de redes de neuronas artificiales para abordar un problema de reconocimiento de figuras sencillas en imágenes
Simulador Interactivo para Sistemas de Generación Distribuida Basados en Energías Renovables
 Simulador Interactivo para Sistemas de Generación Distribuida Basados en Energías Renovables M.C. Rafael Peña Gallardo Dr. J. Aurelio Medina Ríos Universidad Michoacana de San Nicolás de Hidalgo Facultad
Simulador Interactivo para Sistemas de Generación Distribuida Basados en Energías Renovables M.C. Rafael Peña Gallardo Dr. J. Aurelio Medina Ríos Universidad Michoacana de San Nicolás de Hidalgo Facultad
Práctica sobre compartición de instancias remotas.
 Práctica sobre compartición de instancias remotas. Para esta práctica se ha construido un pequeño sistema cliente-servidor que permite la resolución de Sudokus entre varios jugadores. El servidor consta
Práctica sobre compartición de instancias remotas. Para esta práctica se ha construido un pequeño sistema cliente-servidor que permite la resolución de Sudokus entre varios jugadores. El servidor consta
Guía visual de WinUnisoft
 Guía visual de WinUnisoft Utilice esta guía para aprender de forma rápida y sencilla como trabajar con el programa WinUnisoft. En primer lugar hay que saber que el programa está formado por tres módulos:
Guía visual de WinUnisoft Utilice esta guía para aprender de forma rápida y sencilla como trabajar con el programa WinUnisoft. En primer lugar hay que saber que el programa está formado por tres módulos:
Capítulo 3 Usando GUIDE. 3.1 Acerca de GUIDE
 Capítulo 3 Usando GUIDE 3.1 Acerca de GUIDE Las interfaces gráficas de usuario (GUI - Graphical User Interface en inglés), es la forma en que el usuario interactúa con el programa o el sistema operativo
Capítulo 3 Usando GUIDE 3.1 Acerca de GUIDE Las interfaces gráficas de usuario (GUI - Graphical User Interface en inglés), es la forma en que el usuario interactúa con el programa o el sistema operativo
Preliminares. Tipos de variables y Expresiones
 Preliminares. Tipos de variables y Expresiones Felipe Osorio Instituto de Estadística Pontificia Universidad Católica de Valparaíso Marzo 5, 2015 1 / 20 Preliminares Computadoras desarrollan tareas a un
Preliminares. Tipos de variables y Expresiones Felipe Osorio Instituto de Estadística Pontificia Universidad Católica de Valparaíso Marzo 5, 2015 1 / 20 Preliminares Computadoras desarrollan tareas a un
Tema 8: Gestión de la Configuración
 Proyectos Informáticos Tema 8: Gestión de la Configuración Contenidos Gestión de la configuración: identificación, versionado, control de los elementos de configuración y líneas base de un proyecto. Gestión
Proyectos Informáticos Tema 8: Gestión de la Configuración Contenidos Gestión de la configuración: identificación, versionado, control de los elementos de configuración y líneas base de un proyecto. Gestión
Introducción a Matlab
 Introducción a Matlab Visión en Robótica 1er cuatrimestre de 2013 En este apunte veremos las operaciones más comunes del entorno de programación Matlab. Se aprerán a manejar los aspectos básicos como saltos
Introducción a Matlab Visión en Robótica 1er cuatrimestre de 2013 En este apunte veremos las operaciones más comunes del entorno de programación Matlab. Se aprerán a manejar los aspectos básicos como saltos
Introducción a la Computación TFA
 Introducción a la Computación TFA Departamento de Informática Facultad de Ciencias Físico, Matemáticas y Naturales- UNSL Lenguaje de Diseño de Algoritmos Estructura de Control Condicional Simple y Múltiple
Introducción a la Computación TFA Departamento de Informática Facultad de Ciencias Físico, Matemáticas y Naturales- UNSL Lenguaje de Diseño de Algoritmos Estructura de Control Condicional Simple y Múltiple
3.1 JUSTIFICACION E IMPORTANCIA DEL PRESENTE TRABAJO DE
 III INTRODUCCION 3.1 JUSTIFICACION E IMPORTANCIA DEL PRESENTE TRABAJO DE INVESTIGACION Hoy en día la computadora es tan importante para el ingeniero Como lo fue en su momento la regla de cálculo. Mediante
III INTRODUCCION 3.1 JUSTIFICACION E IMPORTANCIA DEL PRESENTE TRABAJO DE INVESTIGACION Hoy en día la computadora es tan importante para el ingeniero Como lo fue en su momento la regla de cálculo. Mediante
Tema 6: Introducción a los gráficos en 3 dimensiones
 Tema 6: Introducción a los gráficos en 3 dimensiones 1. Introducción Matlab está preparado para realizar diversos tipos de gráficos en tres dimensiones. Ya se ha comentado que por las características del
Tema 6: Introducción a los gráficos en 3 dimensiones 1. Introducción Matlab está preparado para realizar diversos tipos de gráficos en tres dimensiones. Ya se ha comentado que por las características del
PROCESO ADMINISTRACIÓN DE RECURSOS TECNOLÓGICOS SUBPROCESO ADMINISTRACIÓN DE CONTINGENCIAS
 Objetivo Este subproceso establece las actividades que se realizan para la planeación y control de respaldos y desastres relacionados con los recursos informáticos existentes en el Senado de La República
Objetivo Este subproceso establece las actividades que se realizan para la planeación y control de respaldos y desastres relacionados con los recursos informáticos existentes en el Senado de La República
Operaciones con vectores
 Fundamentos de Informática 2012-2013 Laboratorio 12: Vectores (2) Objetivos: Practicar con algoritmos típicos con vectores (arrays de una dimensión) Operaciones con vectores Interfaz Figura 12.1. Interfaz
Fundamentos de Informática 2012-2013 Laboratorio 12: Vectores (2) Objetivos: Practicar con algoritmos típicos con vectores (arrays de una dimensión) Operaciones con vectores Interfaz Figura 12.1. Interfaz
PETrA PETRA - MANUAL DE USUARIO PARA ESTUDIANTES. Edición: 2 Lugar y fecha: Universidad de Córdoba, 29 de junio de 2012 Referencia: PETrA
 PETrA PETRA - MANUAL DE USUARIO PARA ESTUDIANTES Edición: 2 Lugar y fecha: Universidad de Córdoba, 29 de junio de 2012 Referencia: PETrA ÍNDICE DE CONTENIDO Portal del Estudiante para Trámites Administrativos
PETrA PETRA - MANUAL DE USUARIO PARA ESTUDIANTES Edición: 2 Lugar y fecha: Universidad de Córdoba, 29 de junio de 2012 Referencia: PETrA ÍNDICE DE CONTENIDO Portal del Estudiante para Trámites Administrativos
Formularios. Formularios Diapositiva 1
 Formularios Crear un formulario utilizando el Asistente para formularios Modificación en vista Diseño Adición de Controles a un Formulario Adición de un Subformulario a un formulario Formularios Diapositiva
Formularios Crear un formulario utilizando el Asistente para formularios Modificación en vista Diseño Adición de Controles a un Formulario Adición de un Subformulario a un formulario Formularios Diapositiva
Manual de uso del software. RoboPlus. Octubre 6. Interconectividad de dispositivos Nombre del profesor: Emilio Vargas Soto
 Manual de uso del software RoboPlus Octubre 6 Interconectividad de dispositivos Nombre del profesor: Emilio Vargas Soto Elaborado por: Andrés Ernesto López Sandoval. 164139 Martha Fernanda Iturbe Cejudo.
Manual de uso del software RoboPlus Octubre 6 Interconectividad de dispositivos Nombre del profesor: Emilio Vargas Soto Elaborado por: Andrés Ernesto López Sandoval. 164139 Martha Fernanda Iturbe Cejudo.
Funcionalidades Software SAT GotelGest.Net (Software de Servicio de Asistencia Técnica)
") Funcionalidades Software SAT GotelGest.Net (Software de Servicio de Asistencia Técnica) Servinet Sistemas y Comunicación S.L. www.softwaregestionsat.com Última Revisión: Octubre 2014 FUNCIONALIDADES SAT
Funcionalidades Software SAT GotelGest.Net (Software de Servicio de Asistencia Técnica) Servinet Sistemas y Comunicación S.L. www.softwaregestionsat.com Última Revisión: Octubre 2014 FUNCIONALIDADES SAT
Es el listado de los productos que están ofertados en la página.
 1 Productos Es el listado de los productos que están ofertados en la página. En la tabla de productos hay las siguientes columnas: Casilla de verificación: sirve para seleccionar uno o varios productos
1 Productos Es el listado de los productos que están ofertados en la página. En la tabla de productos hay las siguientes columnas: Casilla de verificación: sirve para seleccionar uno o varios productos
Microsoft Excel 2010. Unidad 4 Planilla de cálculos Conceptos básicos. Qué es Excel? Qué es Excel? 10/23/2015. Objetivos de esta clase
 Unidad 4 Planilla de cálculos Conceptos básicos Microsoft Excel 2010 Objetivos de esta clase Comprender la utilidad y el uso básico de Excel Conocer las partes de la ventana de Excel Navegar a través de
Unidad 4 Planilla de cálculos Conceptos básicos Microsoft Excel 2010 Objetivos de esta clase Comprender la utilidad y el uso básico de Excel Conocer las partes de la ventana de Excel Navegar a través de
El entorno Vision - E Laboratory
 Prácticas de laboratorio El entorno Vision - E Laboratory Una imagen vale más que mil palabras Proverbio chino. 1. Introducción 2. El entorno Vision-E 2.1 Panel de Imágenes 2.2 Área de Menús y Edición
Prácticas de laboratorio El entorno Vision - E Laboratory Una imagen vale más que mil palabras Proverbio chino. 1. Introducción 2. El entorno Vision-E 2.1 Panel de Imágenes 2.2 Área de Menús y Edición
Experiencia 2 y 3 : Cableado y Switchs (Documentación)
") Experiencia 2 y 3 : Cableado y Switchs (Documentación) 1 Objetivos: Complementar los conocimientos teóricos y prácticos del alumno en el campo de las redes de computadores. Aprender las características
Experiencia 2 y 3 : Cableado y Switchs (Documentación) 1 Objetivos: Complementar los conocimientos teóricos y prácticos del alumno en el campo de las redes de computadores. Aprender las características
Introducción al lenguaje Java Práctica Editor de Línea
 Introducción al lenguaje Java Práctica Editor de Línea (Diciembre 2006) 1 Introducción al lenguaje Java Práctica Editor de Línea Dpto. LSIIS. Unidad de Programación Normas y Objetivos Objetivo: el objetivo
Introducción al lenguaje Java Práctica Editor de Línea (Diciembre 2006) 1 Introducción al lenguaje Java Práctica Editor de Línea Dpto. LSIIS. Unidad de Programación Normas y Objetivos Objetivo: el objetivo
ÍNDICE SISTEMAS OPERATIVOS... 5
 INTRODUCCIÓN HABILIDADES INFORMÁTICAS BÁSICAS PARA ADULTOS SKILLS es un completo curso destinado a alumnos adultos, en particular, a empleados de mayor edad, de forma que puedan adquirir/mejorar sus conocimientos
INTRODUCCIÓN HABILIDADES INFORMÁTICAS BÁSICAS PARA ADULTOS SKILLS es un completo curso destinado a alumnos adultos, en particular, a empleados de mayor edad, de forma que puedan adquirir/mejorar sus conocimientos
Existen tres Tipos de Formatos para Presupuestos que son la base de cualquier Opción de Impresión: Tradicional Moderno Formal
 La herramienta de edición de Formatos de Presupuestos permite configurar distintas Opciones de Impresión. Desde el Menú Herramientas Opciones, en la solapa Presupuesto, es posible crear, editar o eliminar
La herramienta de edición de Formatos de Presupuestos permite configurar distintas Opciones de Impresión. Desde el Menú Herramientas Opciones, en la solapa Presupuesto, es posible crear, editar o eliminar
Entendiendo y Optimizando MySQL
 Grupo de Usuarios de Linux Universidad Carlos III de Madrid. 10 de Noviembre de 2010 Indice Arquitectura 1 Arquitectura 2 3 4 5 Arquitectura Sistema de Gestión de Bases de Datos. GPL. Escrito en C y C++.
Grupo de Usuarios de Linux Universidad Carlos III de Madrid. 10 de Noviembre de 2010 Indice Arquitectura 1 Arquitectura 2 3 4 5 Arquitectura Sistema de Gestión de Bases de Datos. GPL. Escrito en C y C++.
Figura 3.1.1 Vector AP en la trama {A}
 3 Desarrollo 3.1 Vector de posición Un punto en el espacio puede ser ubicado utilizando un vector de posición, el cual tiene una dirección y magnitud. Estableciendo un sistema de coordenadas de dos ejes
3 Desarrollo 3.1 Vector de posición Un punto en el espacio puede ser ubicado utilizando un vector de posición, el cual tiene una dirección y magnitud. Estableciendo un sistema de coordenadas de dos ejes
Clases y Objetos. Informática II Ingeniería Electrónica
 Clases y Objetos Informática II Ingeniería Electrónica Los Tipos de Datos Hasta ahora, en un programa podemos usar para representar variables a: Tipos fundamentales : enteros (int), caracteres (char),
Clases y Objetos Informática II Ingeniería Electrónica Los Tipos de Datos Hasta ahora, en un programa podemos usar para representar variables a: Tipos fundamentales : enteros (int), caracteres (char),
Arquitectura de Aplicaciones
 1 Capítulo 13: Arquitectura de aplicaciones. - Sommerville Contenidos del capítulo 13.1 Sistemas de procesamiento de datos 13.2 Sistemas de procesamiento de transacciones 13.3 Sistemas de procesamiento
1 Capítulo 13: Arquitectura de aplicaciones. - Sommerville Contenidos del capítulo 13.1 Sistemas de procesamiento de datos 13.2 Sistemas de procesamiento de transacciones 13.3 Sistemas de procesamiento
AUTOGUIADO DE ROBOTS MÓVILES MEDIANTE REDES NEURONALES
 XXV Jornadas de Automática Ciudad Real, del 8 al 10 de septiembre de 2004 AUTOGUIADO DE ROBOTS MÓVILES MEDIANTE REDES NEURONALES Mª Concepción Marcos Provecho Escuela de Ingenierías Industrial e Informática.
XXV Jornadas de Automática Ciudad Real, del 8 al 10 de septiembre de 2004 AUTOGUIADO DE ROBOTS MÓVILES MEDIANTE REDES NEURONALES Mª Concepción Marcos Provecho Escuela de Ingenierías Industrial e Informática.
GE Power Management. 6S``O[WS\bORS1]\TWUc`OQWÕ\g. GE-FILES 7\ab`cQQW]\Sa 539$ &
![GE Power Management. 6S``O[WS\bORS1]\TWUc`OQWÕ\g. GE-FILES 7\ab`cQQW]\Sa 539$ &](/thumbs/33/16064673.jpg "GE Power Management. 6S``O[WS\bORS1]\TWUc`OQWÕ\g. GE-FILES 7\ab`cQQW]\Sa 539$ &") ')) GE Power Management 6S``O[WS\bORS1]\TWUc`OQWÕ\g /\ãzwawars@suwab`]arszawabs[o GE-FILES 7\ab`cQQW]\Sa 539$ & *(Ã3RZHUÃ0DQDJHPHQW +D\DOJRTXHQRHQFXHQWUD" $OJRQRHVWiVXILFLHQWHPHQWHFODUR" 6,Ã 7,(1(Ã $/*Ô1Ã
')) GE Power Management 6S``O[WS\bORS1]\TWUc`OQWÕ\g /\ãzwawars@suwab`]arszawabs[o GE-FILES 7\ab`cQQW]\Sa 539$ & *(Ã3RZHUÃ0DQDJHPHQW +D\DOJRTXHQRHQFXHQWUD" $OJRQRHVWiVXILFLHQWHPHQWHFODUR" 6,Ã 7,(1(Ã $/*Ô1Ã
Java Inicial (20 horas)
") Java Inicial (20 horas) 1 Temario 1. Programación Orientada a Objetos 2. Introducción y Sintaxis Java 3. Sentencias Control Flujo 4. POO en Java 5. Relaciones entre Objetos 6. Polimorfismo, abstracción
Java Inicial (20 horas) 1 Temario 1. Programación Orientada a Objetos 2. Introducción y Sintaxis Java 3. Sentencias Control Flujo 4. POO en Java 5. Relaciones entre Objetos 6. Polimorfismo, abstracción
COLEGIO GREGORIO JOSÉ RAMÍREZ CASTRO / INFORMÁTICA EDUCATIVA. Material para Trabajar con Estudiantes de III Ciclo de Informática Educativa
 REFERENCIA RÁPIDA DEL AAALOGO SOFTWARE CREADOR DE LOGOTIPOS PARA EMPRESAS Librería de Plantillas: Al iniciar el AAALogo se presenta una pantalla con los botones (Previous Page) Página Anterior y (Next
REFERENCIA RÁPIDA DEL AAALOGO SOFTWARE CREADOR DE LOGOTIPOS PARA EMPRESAS Librería de Plantillas: Al iniciar el AAALogo se presenta una pantalla con los botones (Previous Page) Página Anterior y (Next
COMPUTADORES III VIRTUAL CYBERTECH: SYSTEM DESIGN DESCRIPTION EQUIPO YELLOW:
 COMPUTADORES III VIRTUAL CYBERTECH: SYSTEM DESIGN DESCRIPTION EQUIPO YELLOW: Marta Dorado (Project Manager), Álvaro López, Antonio Díez, Carlos Sampedro, Francisco Suárez, Marie Destarac y Ricardo Espinoza.
COMPUTADORES III VIRTUAL CYBERTECH: SYSTEM DESIGN DESCRIPTION EQUIPO YELLOW: Marta Dorado (Project Manager), Álvaro López, Antonio Díez, Carlos Sampedro, Francisco Suárez, Marie Destarac y Ricardo Espinoza.
Procesadores de lenguaje Tema 5 Comprobación de tipos
 Procesadores de lenguaje Tema 5 Comprobación de tipos Departamento de Ciencias de la Computación Universidad de Alcalá Resumen Sistemas de tipos. Expresiones de tipo. Equivalencia de tipos. Sobrecarga,
Procesadores de lenguaje Tema 5 Comprobación de tipos Departamento de Ciencias de la Computación Universidad de Alcalá Resumen Sistemas de tipos. Expresiones de tipo. Equivalencia de tipos. Sobrecarga,
5ª Práctica. Matlab página 1
 5ª Práctica. Matlab página PROGRAMACIÓN EN MATLAB PRÁCTICA 05 GRÁFICOS EN MATLAB 2D Y 3D LECTURA DE FICHEROS ENTRADA DE PUNTOS CON EL RATÓN EJERCICIO. GRÁFICOS EN MATLAB BIDIMENSIONALES... EJERCICIO. UTILIZACIÓN
5ª Práctica. Matlab página PROGRAMACIÓN EN MATLAB PRÁCTICA 05 GRÁFICOS EN MATLAB 2D Y 3D LECTURA DE FICHEROS ENTRADA DE PUNTOS CON EL RATÓN EJERCICIO. GRÁFICOS EN MATLAB BIDIMENSIONALES... EJERCICIO. UTILIZACIÓN
Agradecimiento: A Javier Lomelín Urrea por su dedicación y esmero en este proyecto. Manuel Fernando Guzmán Muñoz Presidente OMIJal
 Karel para todos! 1 Estás interesado en aprender a programar en lenguaje de Karel? Te interesa la Olimpiada Mexicana de Informática? Esta es tu oportunidad de unirte al equipo OMI y ser parte de la mejor
Karel para todos! 1 Estás interesado en aprender a programar en lenguaje de Karel? Te interesa la Olimpiada Mexicana de Informática? Esta es tu oportunidad de unirte al equipo OMI y ser parte de la mejor
Programación Orientada a Objetos con Java
 Programación Orientada a Objetos con Java M.C. Jorge Eduardo Ibarra Esquer jorgeeie@uabc.mx Sobrecarga de métodos Java permite la definición de dos o más métodos que tengan el mismo nombre, dentro de la
Programación Orientada a Objetos con Java M.C. Jorge Eduardo Ibarra Esquer jorgeeie@uabc.mx Sobrecarga de métodos Java permite la definición de dos o más métodos que tengan el mismo nombre, dentro de la
crmitv.com Que es crmitv.com?
 crmitv.com Que es crmitv.com? crmitv.com es un sistema informático online de apoyo a la gestión de las relaciones con los clientes, a la venta y al marketing que permite gestionar y analizar los descuentos,
crmitv.com Que es crmitv.com? crmitv.com es un sistema informático online de apoyo a la gestión de las relaciones con los clientes, a la venta y al marketing que permite gestionar y analizar los descuentos,
Microsoft SQL Server Conceptos.
 Microsoft Conceptos. Microsoft 2005 es una plataforma de base de datos a gran escala de procesamiento de transacciones en línea (OLTP) y de procesamiento analítico en línea (OLAP). La siguiente tabla muestra
Microsoft Conceptos. Microsoft 2005 es una plataforma de base de datos a gran escala de procesamiento de transacciones en línea (OLTP) y de procesamiento analítico en línea (OLAP). La siguiente tabla muestra
PowerPoint 2010 Introducción a Microsoft Office PowerPoint 2010
 PowerPoint 2010 Introducción a Microsoft Office PowerPoint 2010 Contenido CONTENIDO... 1 DESCRIPCIÓN DE LA VENTANA PRINCIPAL... 2 INTRODUCCIÓN A POWERPOINT WEB APP... 8 1 Descripción de la ventana principal
PowerPoint 2010 Introducción a Microsoft Office PowerPoint 2010 Contenido CONTENIDO... 1 DESCRIPCIÓN DE LA VENTANA PRINCIPAL... 2 INTRODUCCIÓN A POWERPOINT WEB APP... 8 1 Descripción de la ventana principal
Sensor de Temperatura utilizando el Starter Kit Javelin Stamp. Realizado por: Bertha Palomeque A. Rodrigo Barzola J.
 Sensor de Temperatura utilizando el Starter Kit Javelin Stamp Realizado por: Bertha Palomeque A. Rodrigo Barzola J. INTRODUCCION DIFERENCIAS EJEMPLOS JAVA Orientado a Objetos Multiplataforma Programar
Sensor de Temperatura utilizando el Starter Kit Javelin Stamp Realizado por: Bertha Palomeque A. Rodrigo Barzola J. INTRODUCCION DIFERENCIAS EJEMPLOS JAVA Orientado a Objetos Multiplataforma Programar
Sobre la lectura y escritura de datos en FORTRAN.
 Sobre la lectura y escritura de datos en FORTRAN. 1. Las sentencias READ /WRITE Uno de los elementos básicos de la programación e cualquier lenguaje es la lectura y/o escritura de datos. En el lenguaje
Sobre la lectura y escritura de datos en FORTRAN. 1. Las sentencias READ /WRITE Uno de los elementos básicos de la programación e cualquier lenguaje es la lectura y/o escritura de datos. En el lenguaje
Ayuda básica relativa al interfaz web
 Ayuda básica relativa al interfaz web El webmail es un cliente de correo que nos permite visualizar los mensajes de nuestras cuentas de email a través de una página web, pudiendo acceder desde cualquier
Ayuda básica relativa al interfaz web El webmail es un cliente de correo que nos permite visualizar los mensajes de nuestras cuentas de email a través de una página web, pudiendo acceder desde cualquier
ARREGLOS DEFINICION GENERAL DE ARREGLO
 ARREGLOS DEFINICION GENERAL DE ARREGLO Conjunto de cantidades o valores homogéneos, que por su naturaleza se comportan de idéntica forma y deben de ser tratados en forma similar. Se les debe de dar un
ARREGLOS DEFINICION GENERAL DE ARREGLO Conjunto de cantidades o valores homogéneos, que por su naturaleza se comportan de idéntica forma y deben de ser tratados en forma similar. Se les debe de dar un
Tema 4: Empezando a trabajar con ficheros.m
 Tema 4: Empezando a trabajar con ficheros.m 1. Introducción Como ya se comentó en el punto 3 del tema1, en Matlab tienen especial importancia los ficheros M de extensión.m. Contienen conjuntos de comandos
Tema 4: Empezando a trabajar con ficheros.m 1. Introducción Como ya se comentó en el punto 3 del tema1, en Matlab tienen especial importancia los ficheros M de extensión.m. Contienen conjuntos de comandos
UNIVERSIDAD POLITÉCNICA DE MADRID
 UNIVERSIDAD POLITÉCNICA DE MADRID DEPARTAMENTO DE ELECTRÓNICA, AUTOMÁTICA E INFORMÁTICA INDUSTRIAL Prácticas de Visión Artificial Práctica 2 Adquisición de imágenes y entornos gráficos 2.2 Adquisición
UNIVERSIDAD POLITÉCNICA DE MADRID DEPARTAMENTO DE ELECTRÓNICA, AUTOMÁTICA E INFORMÁTICA INDUSTRIAL Prácticas de Visión Artificial Práctica 2 Adquisición de imágenes y entornos gráficos 2.2 Adquisición
MANUAL DE USUARIO. JNyARchiTech ALFONSO NEIL JIMÉNEZ CASALLAS MAYDA ALEXANDRA CARVAJAL VARGAS PONTIFICIA UNIVERSIDAD JAVERIANA
 MANUAL DE USUARIO JNyARchiTech ALFONSO NEIL JIMÉNEZ CASALLAS MAYDA ALEXANDRA CARVAJAL VARGAS PONTIFICIA UNIVERSIDAD JAVERIANA 2012 TABLA DE CONTENIDO 1. QUÉ ES JNYARCHITECH?... 3 2. INSTRUCCIONES DE USO...
MANUAL DE USUARIO JNyARchiTech ALFONSO NEIL JIMÉNEZ CASALLAS MAYDA ALEXANDRA CARVAJAL VARGAS PONTIFICIA UNIVERSIDAD JAVERIANA 2012 TABLA DE CONTENIDO 1. QUÉ ES JNYARCHITECH?... 3 2. INSTRUCCIONES DE USO...
Conceptos Fundamentales sobre UNIX Laboratorio 7.2.3 Administrador de Archivos del CDE Avanzado (Tiempo estimado: 30 min.)
") Conceptos Fundamentales sobre UNIX Laboratorio 7.2.3 Administrador de Archivos del CDE Avanzado (Tiempo estimado: 30 min.) Objetivos: Aprender a utilizar las funcionalidades más avanzadas de los administradores
Conceptos Fundamentales sobre UNIX Laboratorio 7.2.3 Administrador de Archivos del CDE Avanzado (Tiempo estimado: 30 min.) Objetivos: Aprender a utilizar las funcionalidades más avanzadas de los administradores
Instrumentación virtual
 Instrumentación virtual Tema 3 SubVI s Introducción al tema En este tema se desarrolla el concepto de SubVI, el cual se entiende como una subrutina en un programa tradicional, y se obtienen beneficios
Instrumentación virtual Tema 3 SubVI s Introducción al tema En este tema se desarrolla el concepto de SubVI, el cual se entiende como una subrutina en un programa tradicional, y se obtienen beneficios
3_formato I. NOTA: al pegar unas celdas sobre otras no vacías, se borrará el contenido de estas últimas.
 3. Luego se seleccionan las celdas donde se quiere que se sitúen las celdas cortadas. No hace falta seleccionar el rango completo sobre el que se va a pegar, ya que si se selecciona una única celda, Calc
3. Luego se seleccionan las celdas donde se quiere que se sitúen las celdas cortadas. No hace falta seleccionar el rango completo sobre el que se va a pegar, ya que si se selecciona una única celda, Calc
10.4 Dibujos sobre dominios mallados en triángulos LECCIÓN V
 10.4 Dibujos sobre dominios mallados en triángulos LECCIÓN V >>vx=-y./(x.^+y.^); >>vy=x./(x.^+y.^); >>h=quiver(x,y,vx,vy); >>axis square % calculamos vectores Observa que cerca del (0,0) los vectores se
10.4 Dibujos sobre dominios mallados en triángulos LECCIÓN V >>vx=-y./(x.^+y.^); >>vy=x./(x.^+y.^); >>h=quiver(x,y,vx,vy); >>axis square % calculamos vectores Observa que cerca del (0,0) los vectores se
A continuación se describen cuáles son los elementos principales de las tablas, cómo crear una y cómo modificarla.
 4. TABLAS A continuación se describen cuáles son los elementos principales de las tablas, cómo crear una y cómo modificarla. 4.1. Principales Elementos Al momento de generar y diseñar una tabla es importante
4. TABLAS A continuación se describen cuáles son los elementos principales de las tablas, cómo crear una y cómo modificarla. 4.1. Principales Elementos Al momento de generar y diseñar una tabla es importante
Indicaciones específicas para los análisis estadísticos.
 Tutorial básico de PSPP: Vídeo 1: Describe la interfaz del programa, explicando en qué consiste la vista de datos y la vista de variables. Vídeo 2: Muestra cómo crear una base de datos, comenzando por
Tutorial básico de PSPP: Vídeo 1: Describe la interfaz del programa, explicando en qué consiste la vista de datos y la vista de variables. Vídeo 2: Muestra cómo crear una base de datos, comenzando por
ROBÓTICA PERCEPTUAL Y AUTÓNOMA
 1.PRESENTACIÓN ASIGNATURA DE MÁSTER: ROBÓTICA PERCEPTUAL Y AUTÓNOMA Curso 2009/2010 (Código:10124-) La robótica perceptual y autónoma es una materia en constante evolución. No está consolidada como pueda
1.PRESENTACIÓN ASIGNATURA DE MÁSTER: ROBÓTICA PERCEPTUAL Y AUTÓNOMA Curso 2009/2010 (Código:10124-) La robótica perceptual y autónoma es una materia en constante evolución. No está consolidada como pueda
Es un software de simulación que ejecuta programas en lenguaje de ensamblador para procesadores con arquitectura MIPS32.
 Arquitectura de Computadoras Jose Luis Tecpanecatl Xihuitl, Ph.D. Es un software de simulación que ejecuta programas en lenguaje de ensamblador para procesadores con arquitectura MIPS32. SPIM lee e inmediatamente
Arquitectura de Computadoras Jose Luis Tecpanecatl Xihuitl, Ph.D. Es un software de simulación que ejecuta programas en lenguaje de ensamblador para procesadores con arquitectura MIPS32. SPIM lee e inmediatamente
MATLAB en 30 minutos
 MATLAB en 30 minutos Rafael Collantes. Octubre 200. Introducción MATLAB nació como un programa para cálculo matricial, pero en la actualidad MATLAB es un sistema que permite no solamente realizar todo
MATLAB en 30 minutos Rafael Collantes. Octubre 200. Introducción MATLAB nació como un programa para cálculo matricial, pero en la actualidad MATLAB es un sistema que permite no solamente realizar todo
SEGURIDAD Y PROTECCION DE FICHEROS
 SEGURIDAD Y PROTECCION DE FICHEROS INTEGRIDAD DEL SISTEMA DE ARCHIVOS ATAQUES AL SISTEMA PRINCIPIOS DE DISEÑO DE SISTEMAS SEGUROS IDENTIFICACIÓN DE USUARIOS MECANISMOS DE PROTECCIÓN Y CONTROL INTEGRIDAD
SEGURIDAD Y PROTECCION DE FICHEROS INTEGRIDAD DEL SISTEMA DE ARCHIVOS ATAQUES AL SISTEMA PRINCIPIOS DE DISEÑO DE SISTEMAS SEGUROS IDENTIFICACIÓN DE USUARIOS MECANISMOS DE PROTECCIÓN Y CONTROL INTEGRIDAD
Introducción a las Redes de Computadoras. Obligatorio 2 2011
 Introducción a las Redes de Computadoras Obligatorio 2 2011 Facultad de Ingeniería Instituto de Computación Departamento de Arquitectura de Sistemas Nota previa - IMPORTANTE Se debe cumplir íntegramente
Introducción a las Redes de Computadoras Obligatorio 2 2011 Facultad de Ingeniería Instituto de Computación Departamento de Arquitectura de Sistemas Nota previa - IMPORTANTE Se debe cumplir íntegramente
Práctica 2 Gráficos Vectoriales con SVG (versión 29.09.14)
") Práctica 2 Gráficos Vectoriales con SVG (versión 29.09.14) Programación 3 Curso 2011-2012 Departamento de Lenguajes y Sistemas Informáticos Universidad de Alicante 1. Introducción En esta segunda práctica
Práctica 2 Gráficos Vectoriales con SVG (versión 29.09.14) Programación 3 Curso 2011-2012 Departamento de Lenguajes y Sistemas Informáticos Universidad de Alicante 1. Introducción En esta segunda práctica
CONTROL Y PROGRAMACIÓN DE ROBOTS
 CONTROL Y PROGRAMACIÓN DE ROBOTS GUIA FACIL DE UTILIZACIÓN DEL SCORBOT ER-VII: Esta guía fácil, pretende aportar unos pocos conocimientos básicos, sobre el manejo y programación del Scorbot ER-VII, de
CONTROL Y PROGRAMACIÓN DE ROBOTS GUIA FACIL DE UTILIZACIÓN DEL SCORBOT ER-VII: Esta guía fácil, pretende aportar unos pocos conocimientos básicos, sobre el manejo y programación del Scorbot ER-VII, de
Concurrencia. Primitivas IPC con bloqueo
 Concurrencia Primitivas IPC con bloqueo Primitivas de IPC con bloqueo La solución de Peterson es correcta, pero tiene el defecto de requerir espera ocupada: Cuando un proceso quiere entrar en su región
Concurrencia Primitivas IPC con bloqueo Primitivas de IPC con bloqueo La solución de Peterson es correcta, pero tiene el defecto de requerir espera ocupada: Cuando un proceso quiere entrar en su región
Las conexiones conectan cuerpos entre sí formando un mecanismo En el ejemplo, cada cuerpo, en este caso las distintas secciones de la pala mecánica,
 1 2 Las conexiones conectan cuerpos entre sí formando un mecanismo En el ejemplo, cada cuerpo, en este caso las distintas secciones de la pala mecánica, es representado por su centro de gravedad, en el
1 2 Las conexiones conectan cuerpos entre sí formando un mecanismo En el ejemplo, cada cuerpo, en este caso las distintas secciones de la pala mecánica, es representado por su centro de gravedad, en el
http://math.uprm.edu/~edgar UNIVERSIDAD DE PUERTO RICO
 ESTADISTICA APLICADA I Dr. Edgar Acuna http://math.uprm.edu/~edgar UNIVERSIDAD DE PUERTO RICO RECINTO UNIVERSITARIO DE MAYAGUEZ 2. UNA INTRODUCCIÓN A MINITAB 21Entrando 2.1 a MINITAB Hay dos maneras de
ESTADISTICA APLICADA I Dr. Edgar Acuna http://math.uprm.edu/~edgar UNIVERSIDAD DE PUERTO RICO RECINTO UNIVERSITARIO DE MAYAGUEZ 2. UNA INTRODUCCIÓN A MINITAB 21Entrando 2.1 a MINITAB Hay dos maneras de
Práctica 2 Sólidos Articulados (Asignación 2 de Marzo; Entrega 23 de Marzo a las 23:59)
") Práctica 2 Sólidos Articulados (Asignación 2 de Marzo; Entrega 23 de Marzo a las 23:59) Cómo entregar la práctica? Enviar una copia del fichero Exercise.cpp por email a miguel.otaduy@urjc.es, antes del
Práctica 2 Sólidos Articulados (Asignación 2 de Marzo; Entrega 23 de Marzo a las 23:59) Cómo entregar la práctica? Enviar una copia del fichero Exercise.cpp por email a miguel.otaduy@urjc.es, antes del
Leica Application Suite
 Leica Application Suite Macro Editor y Macro Runner Personalizado y automatizado 2 Las instrucciones se pueden pausar opcionalmente cuando la rutina se ejecuta para interactuar con las imágenes. Las instrucciones
Leica Application Suite Macro Editor y Macro Runner Personalizado y automatizado 2 Las instrucciones se pueden pausar opcionalmente cuando la rutina se ejecuta para interactuar con las imágenes. Las instrucciones
Ahora después de ver las múltiples herramientas de desarrollo de ABAP, podemos ver los detalles del lenguaje:
 Ahora después de ver las múltiples herramientas de desarrollo de ABAP, podemos ver los detalles del lenguaje: El lenguaje ABAP tiene ciertas características generales, que debes conocer: Tiene tipos de
Ahora después de ver las múltiples herramientas de desarrollo de ABAP, podemos ver los detalles del lenguaje: El lenguaje ABAP tiene ciertas características generales, que debes conocer: Tiene tipos de
Tema 7: Programación con Matlab
 Tema 7: Programación con Matlab 1. Introducción Matlab puede utilizarse como un lenguaje de programación que incluye todos los elementos necesarios. Añade la gran ventaja de poder incorporar a los programas
Tema 7: Programación con Matlab 1. Introducción Matlab puede utilizarse como un lenguaje de programación que incluye todos los elementos necesarios. Añade la gran ventaja de poder incorporar a los programas
Uso de archivos en C++
 CICLO 02-2013 UNIVERSIDAD DON BOSCO FACULTAD DE ESTUDIOS TECNOLOGICOS ESCUELA DE COMPUTACION GUIA DE LABORATORIO Nº 11 Nombre de la práctica: Uso de archivos en C++ Lugar de ejecución: Laboratorio de Informática
CICLO 02-2013 UNIVERSIDAD DON BOSCO FACULTAD DE ESTUDIOS TECNOLOGICOS ESCUELA DE COMPUTACION GUIA DE LABORATORIO Nº 11 Nombre de la práctica: Uso de archivos en C++ Lugar de ejecución: Laboratorio de Informática
Calculadora virtual HP Prime
 Calculadora virtual HP Prime Windows es una marca comercial del grupo de empresas Microsoft en los EE. UU. La información contenida en el presente documento está sujeta a cambios sin previo aviso. Las
Calculadora virtual HP Prime Windows es una marca comercial del grupo de empresas Microsoft en los EE. UU. La información contenida en el presente documento está sujeta a cambios sin previo aviso. Las
PROYECTOS, FORMULACIÓN Y CRITERIOS DE EVALUACIÓN
 PROYECTOS, FORMULACIÓN Y CRITERIOS DE EVALUACIÓN GESTIÓN DE PROYECTOS CON PLANNER AVC APOYO VIRTUAL PARA EL CONOCIMIENTO GESTIÓN DE PROYECTOS CON PLANNER Planner es una poderosa herramienta de software
PROYECTOS, FORMULACIÓN Y CRITERIOS DE EVALUACIÓN GESTIÓN DE PROYECTOS CON PLANNER AVC APOYO VIRTUAL PARA EL CONOCIMIENTO GESTIÓN DE PROYECTOS CON PLANNER Planner es una poderosa herramienta de software
Oferta tecnológica: Vehículos autónomos para transporte de materiales en almacenes
 Oferta tecnológica: Vehículos autónomos para transporte de materiales en almacenes Oferta tecnológica: Vehículos autónomos para transporte de materiales en almacenes RESUMEN Investigadores de la Universidad
Oferta tecnológica: Vehículos autónomos para transporte de materiales en almacenes Oferta tecnológica: Vehículos autónomos para transporte de materiales en almacenes RESUMEN Investigadores de la Universidad
Programa Control SMS para Teléfonos Android.
 Programa Control SMS para Teléfonos Android. V1.1 Página 1 de 13 Índice. 1. Introducción... Pág.3 2. Instalación... Pág.3 3. Pantalla Selección Equipo.... Pág.5 4. Añadir Equipo.... Pág.7 5. Pantalla Control
Programa Control SMS para Teléfonos Android. V1.1 Página 1 de 13 Índice. 1. Introducción... Pág.3 2. Instalación... Pág.3 3. Pantalla Selección Equipo.... Pág.5 4. Añadir Equipo.... Pág.7 5. Pantalla Control
Estructuras de Datos y Algoritmos Práctica I - Curso 2012/13
 Estructuras de Datos y Algoritmos Práctica I - Curso 2012/13 Rompiendo el Código Enigma Introducción y objetivos Como un pequeño homenaje a Alan Turing en su año conmemorativo, las prácticas de este curso
Estructuras de Datos y Algoritmos Práctica I - Curso 2012/13 Rompiendo el Código Enigma Introducción y objetivos Como un pequeño homenaje a Alan Turing en su año conmemorativo, las prácticas de este curso
Qcad. Es un programa de diseña asistido por ordenador en 2 dimensiones.
 Qcad Es un programa de diseña asistido por ordenador en 2 dimensiones. 1. La ventana del Qcad Barra de títulos Barra de menús Barra de herramientas Área de dibujo Barra de herramientas de dibujo Barra
Qcad Es un programa de diseña asistido por ordenador en 2 dimensiones. 1. La ventana del Qcad Barra de títulos Barra de menús Barra de herramientas Área de dibujo Barra de herramientas de dibujo Barra
Introducción a la programación orientada a objetos
 Introducción a la programación orientada a objetos 1. Introducción a la programación orientada a objetos 2. Las clases 3. El tipo Struct 4. Diferencias entre Class y Struct 5. Pilares de la Programación
Introducción a la programación orientada a objetos 1. Introducción a la programación orientada a objetos 2. Las clases 3. El tipo Struct 4. Diferencias entre Class y Struct 5. Pilares de la Programación
Práctica 2: Operaciones Binarias
 ITESM Campus Monterrey Depto. de Ing. Eléctrica Laboratorio de Teleingeniería Práctica 2: Operaciones Binarias Objetivo: Comprender las operaciones lógicas básicas, como las compuertas AND, OR, y NOT.
ITESM Campus Monterrey Depto. de Ing. Eléctrica Laboratorio de Teleingeniería Práctica 2: Operaciones Binarias Objetivo: Comprender las operaciones lógicas básicas, como las compuertas AND, OR, y NOT.
Soporte y mantenimiento de base de datos y aplicativos
 Soporte y mantenimiento de base de datos y aplicativos Las bases de datos constituyen la fuente de información primaria a todos los servicios que el centro de información virtual ofrece a sus usuarios,
Soporte y mantenimiento de base de datos y aplicativos Las bases de datos constituyen la fuente de información primaria a todos los servicios que el centro de información virtual ofrece a sus usuarios,
Concurso en Ingeniería de Control
 CEA Concurso en Ingeniería de Control 2012 Control autónomo del seguimiento de trayectorias de un vehículo cuatrirrotor. Documentación Técnica Fase 2 Organiza el Grupo Temático de ingeniería de control
CEA Concurso en Ingeniería de Control 2012 Control autónomo del seguimiento de trayectorias de un vehículo cuatrirrotor. Documentación Técnica Fase 2 Organiza el Grupo Temático de ingeniería de control
1. Manejo de memoria estática 2. Manejo de memoria dinámica
 1. Manejo de memoria estática 2. Manejo de memoria dinámica *La administración de memoria de una computadora es una tarea fundamental debido a que la cantidad de memoria es limitada. *El sistema operativo
1. Manejo de memoria estática 2. Manejo de memoria dinámica *La administración de memoria de una computadora es una tarea fundamental debido a que la cantidad de memoria es limitada. *El sistema operativo
Sistemas de Locomoción de robots móviles. Automatización y Robótica Industrial 5 Ing Industrial
 Sistemas de Locomoción de robots móviles Consideraciones de diseño Maniobrabilidad Controlabilidad Tracción Capacidad de subir pendientes Estabilidad Eficiencia Mantenimiento Impacto ambiental Consideraciones
Sistemas de Locomoción de robots móviles Consideraciones de diseño Maniobrabilidad Controlabilidad Tracción Capacidad de subir pendientes Estabilidad Eficiencia Mantenimiento Impacto ambiental Consideraciones
Ingeniería Superior de Informática
 Ingeniería Superior de Informática Asignatura: Visión Artificial Curso 2007/08 Práctica nº 1 : Fundamentos de la Image Processing Toolbox de MATLAB 1. BREVES DEFINICIONES... 1 2. IMÁGENES EN MATLAB Y LA
Ingeniería Superior de Informática Asignatura: Visión Artificial Curso 2007/08 Práctica nº 1 : Fundamentos de la Image Processing Toolbox de MATLAB 1. BREVES DEFINICIONES... 1 2. IMÁGENES EN MATLAB Y LA