Mecánica del Vuelo del Avión
|
|
|
- Enrique Fuentes Morales
- hace 5 años
- Vistas:
Transcripción
1 Mecánica del Vuelo del Avión Parte I: Actuaciones del Avión Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos Escuela Superior de Ingeniería Universidad de Sevilla Introducción a la Ingeniería Aeroespacial 1
2 Contenido Características globales del avión Polar Eficiencia aerodinámica Actuaciones del avión Actuaciones de punto Vuelo simétrico en plano vertical Vuelo simétrico en plano horizontal Actuaciones integrales Alcance Autonomía Introducción a la Ingeniería Aeroespacial 2
3 Introducción a la Ingeniería Aeroespacial 3 Características globales del Avión En este tema se considera el avión completo. Hipótesis generales: el avión es simétrico es un cuerpo rígido sometido a un conjunto de fuerzas externas. Principales tareas de la Mecánica del Vuelo: Estudio del movimiento como respuesta de las fuerzas externas Estudio de la estabilidad y el control de dicho movimiento. Es necesario caracterizar el avión desde el punto de vista aerodinámico. Hipótesis simplificativas: Polar Parabólica Eficiencia Aerodinámica



4 Introducción a la Ingeniería Aeroespacial 4 Aviones No Simétricos Blohm & Voss BV 141 B-0 Scaled Composites Model 202 Boomerang AD-1 (Ames-Dryden) 1
5 Introducción a la Ingeniería Aeroespacial 5 Polar Parabólica - I La sustentación y la resistencia que genera un avión están directamente relacionadas. Polar del avión: función que relaciona el coeficiente de resistencia (C D ) con el de sustentación (C L ). La polar del avión es fundamental para estimar correctamente las actuaciones del avión. De forma general, el coeficiente de resistencia depende de: De C L, El número de Reynolds Del número de Mach La configuración del avión: no hay una sola polar sino varias según el segmento en el que se encuentre el avión. Despegue Crucero Aterrizaje, etc. La construcción de la polar se construye contabilizando las distintas partes por separado y sumándolas luego con factores de corrección. Una aproximación que en muchos casos de interés proporciona buenos resultados es la polar parabólica: C Do se denomina coeficiente de resistencia sin sustentación, k, parámetro de resistencia inducida unitaria. La resistencia asociada al sumando kc L 2 recibe el nombre de resistencia inducida por la sustentación. Polar parabólica
6 Introducción a la Ingeniería Aeroespacial 6 Polar Parabólica - II Es necesario disponer de métodos para calcular C Do y k, lo cual se estudiará en Cálculo de Aeronaves. Puede decirse que la contribución más importante a C Do es la resistencia debida a la fricción: Para considerar un avión completo, hay combinar adecuadamente los coeficientes correspondientes a cada parte del mismo Ala Fuselaje Cola Existe una interferencia aerodinámica que hace que la resistencia global no sea la suma de las resistencias de cada elemento por separado. Se introduce un factor de interferencia Valores típicos de C Do están entre y 0.04 En cuanto a la resistencia inducida por la sustentación (k): Contribuye de forma notable la resistencia producida por los torbellinos de punta de ala También se tiene una contribución debida a la variación de la fricción al modificar el campo de velocidades sobre el avión Generalmente, k se puede expresar de la forma: =AR Donde φ (o también denominado e) es un factor de eficiencia (Factor de Oswald) cuyos valores típicos están entre 0.65 y 0.85
7 Eficiencia Aerodinámica - I de dc L 0 Introducción a la Ingeniería Aeroespacial 7
8 Eficiencia Aerodinámica - II Introducción a la Ingeniería Aeroespacial 8
9 Introducción a la Ingeniería Aeroespacial 9 Actuaciones del Avión Actuaciones de punto: estudio del movimiento de su centro de masas a lo largo de su trayectoria: vuelo horizontal. en subida. en descenso. en planeo. en viraje. despegue y el aterrizaje. Actuaciones integrales: estudio del movimiento de su centro de masas entre los puntos inicial y final de su trayectoria para una carga de combustible dada: Alcance: distancia recorrida respecto a tierra. Autonomía: tiempo que la aeronave puede mantenerse en vuelo.
10 Introducción a la Ingeniería Aeroespacial 10 Actuaciones de Punto - I El problema de las actuaciones de punto de un avión: estudio del movimiento de su centro de masas a lo largo de su trayectoria movimiento que está regido por la 2 a Ley de Newton. Velocidad del centro de masas respecto a un sistema inercial Fuerza aerodinámica Fuerza gravitatoria Masa del avión Fuerza propulsiva En general la masa es una función del tiempo, como consecuencia del consumo de combustible.
11 Introducción a la Ingeniería Aeroespacial 11 Actuaciones de Punto - II Fuerzas Aerodinámicas y Propulsivas Aceleraciones Gravitatorias
12 Introducción a la Ingeniería Aeroespacial 12 Sistemas de Coordenadas - I La mecánica de vuelo utiliza diferentes sistemas de coordenadas para definir la posición del avión: Sistema inercial: es un sistema fijo respecto a las estrellas fijas o con movimiento rectilíneo uniforme respecto a ellas Sistema de ejes tierra: (O e X e Y e Z e ): el origen O e es un punto cualquiera de la superficie terrestre. los ejes X e e Y e están en el plano horizontal, generalmente X e hacia el Norte e Y e hacia el Este el eje Z e se define formando un triedro a derechas positivo hacia el centro de la Tierra. Hipótesis de Tierra plana : A alturas de vuelo pequeñas comparadas con el radio de la Tierra Velocidades de vuelo pequeñas comparadas con las velocidades de vuelo orbital (vel. rotación tierra 455 m/s) Puede suponerse que el sistema de ejes tierra es inercial.
13 Sistemas de Coordenadas - I Introducción a la Ingeniería Aeroespacial 13
 los eje X h, Y h y Z h son paralelos a los ejes tierra correspondientes.")
14 Introducción a la Ingeniería Aeroespacial 14 Sistemas de Coordenadas - II Sistema de ejes horizonte local (O h X h Y h Z h ): el origen O h es un punto cualquiera del plano de simetría del avión (generalmente el centro de masas) los eje X h, Y h y Z h son paralelos a los ejes tierra correspondientes. Sistema de ejes viento (O w X w Y w Z w ): el origen O w es un punto cualquiera del plano de simetría del avión (generalmente el centro de masas) el eje X w está dirigido en cada instante según el vector velocidad aerodinámica del avión V y en su mismo sentido el eje Z w está situado en el plano de simetría del avión, perpendicular a X w y orientado hacia abajo en la actitud normal de vuelo del avión, el eje Y w completa el triedro. Sistema de ejes velocidad (O v X v Y v Z v ): el origen O v es un punto cualquiera del plano de simetría del avión (generalmente el centro de masas), el eje X v está dirigido en cada instante según el vector velocidad absoluta V g y en su mismo sentido el eje Y v está situado en el plano horizontal, perpendicular a X v y según el ala derecha del avión el eje Z v completa el triedro. Sistema Ejes Viento
15 Introducción a la Ingeniería Aeroespacial 15 Sistemas de Coordenadas - II v - Sistema de ejes velocidad Plano-LD
16 Sistemas de Coordenadas - III Sistema de ejes cuerpo (O b X b Y b Z b ): este sistema es fijo respecto del avión el origen O b es el centro de masas del avión el eje X b está contenido en el plano de simetría y positivo hacia adelante, el eje Z b está contenido en el plano de simetría, perpendicular a X b y positivo hacia abajo en la actitud normal de vuelo, el eje Y b completa el triedro. Introducción a la Ingeniería Aeroespacial 16
17 Actitud del Avión - I Ángulos que definen la actitud de la aeronave: Ángulo de asiento : el ángulo formado por el eje X b y el plano horizontal. Ángulo de balance : el ángulo formado por el eje Y b y el plano horizontal. Ángulo de guiñada : el ángulo formado por la proyección de X b sobre el plano horizontal y la dirección de referencia X h Introducción a la Ingeniería Aeroespacial 17
18 Introducción a la Ingeniería Aeroespacial 18 Actitud del Avión - II Ángulo de guiñada Ángulo de asiento Ángulo de balance

19 Introducción a la Ingeniería Aeroespacial 19 Actitud del Avión - III Ángulos que definen la orientación de la trayectoria del avión. Ángulo de asiento de la velocidad o de trayectoria : el ángulo formado por la velocidad V g y el plano horizontal. Ángulo de guiñada de la velocidad o de rumbo : el ángulo formado por la proyección de V g sobre el plano horizontal y la dirección de referencia X h. Ángulo de balance de la velocidad μ : el ángulo formado por el plano x w z w (plano LD) con el plano vertical que contiene a x w. Plano-LD

20 Introducción a la Ingeniería Aeroespacial 20 Actitud del Avión - III Plano-LD
21 Actitud del Avión - IV Ángulo de ataque : el ángulo que forma la proyección de V (aerodinámica) sobre el plano de simetría del avión con el eje x b. Angulo de resbalamiento : el ángulo que forma el vector V (aerodinámica) con el plano de simetría del avión. Los ángulos y definen la orientación del sistema de ejes cuerpo respecto al de ejes viento definen la orientación del viento incidente respecto del avión. Introducción a la Ingeniería Aeroespacial 21
22 Actitud del Avión - V Ángulo de ataque del empuje : el ángulo que forma F T con el plano X w Y w. Ángulo de resbalamiento del empuje : el ángulo que forma la proyección de F T sobre el plano X w Y w con el eje X w. Los ángulos y definen la orientación del empuje respecto de ejes viento. V g velocidad absoluta V Velocidad aerodinámica V w velocidad del viento X b V w X w Vg =V + V w V F T X w X b F T V w V Introducción a la Ingeniería Aeroespacial 22



23 Introducción a la Ingeniería Aeroespacial 23 Vuelo Simétrico - I Se dice que un avión está en vuelo simétrico si la velocidad aerodinámica V y la fuerza propulsiva F T están contenidas en el plano de simetría del avión. En tal caso se tienen las siguientes propiedades: el plano X w Z w (plano LD) coincide con el plano de simetría del avión: = es el ángulo formado por V y el eje X b es el ángulo formado por F T y V los ejes Y w e Y b coinciden. Plano-LD Considerando que el sistema de ejes tierra es inercial, cuando se supone que no hay viento se verifican las siguientes propiedades: V g = V, los ejes X v y X w coinciden. Vg (velocidad absoluta) X b F T
24 Aeronaves y Vehículos Espaciales 24 Vuelo Simétrico - I Plano-LD Vg (velocidad absoluta) X b
25 Vuelo Simétrico - II En este curso se analizan las actuaciones del avión bajo las siguientes condiciones generales: aire en calma, vuelo simétrico, =0 : el empuje va según la dirección de V. En estas condiciones se verifica Introducción a la Ingeniería Aeroespacial 25
26 Introducción a la Ingeniería Aeroespacial 26 Vuelo Simétrico en el Plano Vertical (V.S.P.V.) - I En esta condición de vuelo el centro de masas del avión siempre se mueve en el plano vertical. Se tiene μ = 0. El plano de simetría del avión coincide con el plano vertical. Los ejes viento y los ejes velocidad coinciden. Las ecuaciones del movimiento, según ejes velocidad son Aceleración tangencial Diferentes vuelos simétricos que estudiaremos: Vuelo rectilíneo uniforme Vuelo horizontal Subida y descenso Planeo Viraje circular uniforme Aceleración normal
27 Vuelo Simétrico P.V. - Vuelo rectilíneo uniforme (V.R.U.) Vuelo Rectilíneo y Uniforme: Vuelo horizontal Subida y descenso Planeo No existe la aceleración centrípeta (normal) ( =cte) No existe aceleración tangencial (V=cte) Introducción a la Ingeniería Aeroespacial 27
28 Vuelo Simétrico P.V. V.R.U. Vuelo horizontal - I Vuelo horizontal: No existe la aceleración centrípeta ( =0), ni aceleración tangencial. El factor de carga se define como: En vuelo horizontal n=1 Introducción a la Ingeniería Aeroespacial 28
29 Introducción a la Ingeniería Aeroespacial 29 Vuelo Simétrico P.V. V.R.U. Vuelo horizontal - II La primera ecuación: Define la relación existente entre la velocidad de vuelo y el ángulo de ataque: Para incrementar V es necesario disminuir La segunda ecuación: Proporciona el empuje necesario en función de la velocidad de vuelo También indica que para cada valor del empuje suministrado por el motor existen dos posibles velocidades de vuelo: en la práctica la velocidad de vuelo es la más grande de las dos. Pizarra P1 (a,b)
30 Vuelo Simétrico P.V. V.R.U. Vuelo horizontal - III El empuje necesario para vuelo horizontal será mínimo cuando la eficiencia aerodinámica sea máxima La velocidad mínima de vuelo a cada altura viene dada por la velocidad de entrada de pérdida V s. La velocidad máxima a cada altura se obtiene con la condición de empuje suministrado máximo (a esa altura). El empuje varia con la altura y con la velocidad Introducción a la Ingeniería Aeroespacial 30
31 Introducción a la Ingeniería Aeroespacial 31 Vuelo Simétrico P.V. V.R.U. Vuelo horizontal - IV Techo Teórico: Es la máxima altitud para la que es posible el vuelo horizontal, rectilíneo y uniforme, para un peso y una configuración dados. Viene determinado por la condición de que el empuje máximo suministrado por el motor sea igual al empuje mínimo necesario para vuelo horizontal. El empuje del motor depende de la altitud de vuelo, es necesario conocer esta característica del motor para calcular dicho techo teórico Se desarrollará en la asignatura de Sistemas de Propulsión.
32 Vuelo Simétrico P.V. V.R.U. Subida y descenso - I Subida y Descenso: La condición de subida o descenso es =constante 0 Factor de carga Pizarra El factor de carga n<1. Se utiliza la aproximación del ángulo de asiento de la velocidad pequeño lo cual simplifica notablemente el problema. Para el caso de subida y bajada de aviones esto es bastante común ya que los ángulos de subida y bajada son bastante pequeños Introducción a la Ingeniería Aeroespacial 32
33 Introducción a la Ingeniería Aeroespacial 33 Vuelo Simétrico P.V. V.R.U. Subida y descenso - II Pizarra Esta ecuación proporciona: Una estimación del empuje necesario para mantener, a una altura dada, una subida uniforme, definida por y V indica el valor de para cada valor del empuje suministrado por el motor, a una velocidad dada: el ángulo de asiento de velocidad de un avión es controlado mediante el empuje de su grupo motopropulsor. el empuje necesario para vuelo horizontal, a una altura dada el empuje suministrado por el grupo motopropulsor Variación del empuje con la velocidad
34 Introducción a la Ingeniería Aeroespacial 34 Vuelo Simétrico P.V. V.R.U. Subida y descenso - III La velocidad ascensional, V a, se define como la altura ganada por el avión (o perdida, si desciende) por unidad de tiempo: altura Se desprecia la variación local de la densidad con la altura en todo el análisis de la subida y descenso.
35 Planeo: Vuelo Simétrico P.V. V.R.U. Planeo - I Pizarra El planeo es un caso particular de descenso, aquél en que el empuje suministrado en nulo. Las ecuaciones del movimiento son Ángulo de planeo (descenso) Estas expresiones indican que, para tener una condición de planeo uniforme, la fuerza aerodinámica (total) debe ser vertical para equilibrar al peso. Eficiencia aerodinámica Introducción a la Ingeniería Aeroespacial 35
36 Vuelo Simétrico P.V. V.R.U. Planeo - II Si se considera el caso en el que d << 1, lo cual es adecuado cuando E es grande (los veleros), las ecuaciones del planeo se reducen a La eficiencia aerodinámica depende del ángulo de ataque, por lo que se tiene que, en general, para una eficiencia aerodinámica dada existen dos condiciones de planeo distintas. El ángulo de planeo mínimo está definido por la eficiencia máxima. Para cada avión existe una eficiencia aerodinámica máxima por lo que el ángulo de planeo mínimo es a su vez una característica propia de cada avión Introducción a la Ingeniería Aeroespacial 36
37 Vuelo Simétrico P.V. V.R.U. Planeo - III Introducción a la Ingeniería Aeroespacial 37
38 Introducción a la Ingeniería Aeroespacial 38 Vuelo Simétrico P.V. V.R.U. Planeo - IV Pizarra La velocidad de descenso del planeador, V d, esto es, la altura perdida por unidad de tiempo, viene dada por La velocidad de descenso mínima se puede obtener derivando la ecuación anterior respecto de V. Esta ecuación puede escribirse en la forma
39 Aeronaves y Vehículos Espaciales 39 Vuelo Simétrico P.V. V.R.U. Planeo - V Vuelo en Planeo Problema A5 Maximizar Alcance Velocidad de Descenso Minimizar Velocidad de Descenso
 Fallo del motor 2 Alerta baja temperatura y")
 (izq.")


40 Air Transat 236 (120 km) 24 de agosto de 2001, entre Toronto (Canadá) y Lisboa (Portugal): 306 personas Se queda sin combustible (fuga en el motor) Fallo del motor 2 Alerta baja temperatura y baja presión (motor 2) Se cree que es una falsa alarma Desbalance de alas (fuel imbalance) Se traspasa combustible (port-> board) (izq. -> derecha) Fuga de 1 Gallon/s Se declara emergencia: Fallo del motor a 135 millas Lajes Fallo del motor 1: Se baja a ft, motor a potencia máxima Fallo del motor a 65 millas Lajes (120 km) Aterrizaje de emergencia en la Base Aérea militar de Lajes en las Islas Azores A C-GITS de Air Transat You Tube - Mayday: Catástrofes Aéreas - Volando sin combustible Introducción a la Ingeniería Aeroespacial 40
41 Vuelo Simétrico P.V. Viraje circular uniforme - I El viraje circular uniforme presenta las siguientes características: V = constante. No existe aceleración lineal La velocidad angular (ángulo girado por el avión en el plano vertical por unidad de tiempo) Problema A3 Si es R el radio de curvatura del viraje, entonces la velocidad angular es Las ecuaciones del movimiento son: a tangencial a normal El ángulo de asiento de la velocidad ( ) varía con la posición del avión a lo largo de la trayectoria: varía con el tiempo, en la forma: El factor de carga viene ahora dado por Introducción a la Ingeniería Aeroespacial 41
42 Introducción a la Ingeniería Aeroespacial 42 Vuelo Simétrico en el Plano Horizontal (V.S.P.H.) Pizarra En esta condición de vuelo el centro de masas del avión siempre se mueve en el plano horizontal. Se verifica = 0 (h = const). El plano x v y v (ejes velocidad) coincide con el plano horizontal y el eje z v es vertical. En general, el ángulo de balance (μ) no será nulo. Las ecuaciones del movimiento según ejes velocidad son:
43 Introducción a la Ingeniería Aeroespacial 43 Vuelo Simétrico P.H. Viraje Circular Uniforme - I Para curvar la trayectoria en un plano horizontal es necesario generar una fuerza normal a la misma y contenida en dicho plano. La forma comúnmente empleada consiste en dar un ángulo de balance sin resbalamiento la componente de la sustentación en el plano horizontal curva la trayectoria Por ser el vuelo uniforme no existe aceleración tangencial La velocidad angular Se adopta el siguiente criterio de signos: Si es R el radio de curvatura del viraje, entonces la velocidad angular es = V/R. μ - ángulo de balance de la sustentación
44 Introducción a la Ingeniería Aeroespacial 44 Vuelo Simétrico P.H. Viraje Circular Uniforme - II Pizarra
45 Introducción a la Ingeniería Aeroespacial 45 Vuelo Simétrico P.H. Viraje Circular Uniforme - III El factor de carga y el ángulo de balance de la velocidad están pues relacionados, de forma que si uno aumenta el otro también lo hace. Proporciona el empuje necesario para mantener, a una altura dada, un viraje uniforme, definido por V y n. Define el radio de curvatura del viraje, dados μ y V. R
46 Vuelo Simétrico P.H. Viraje Circular Uniforme - IV Las ecuaciones que definen R y también pueden escribirse de la forma siguiente para que el radio de curvatura sea lo menor posible, o la velocidad angular sea lo mayor posible, interesa que el factor de carga sea lo mayor posible y que la velocidad de vuelo sea lo menor posible. Comparando las ecuaciones del viraje horizontal con las del vuelo horizontal rectilíneo se deduce para las mismas condiciones de vuelo y para la misma configuración, n y T son mayores en viraje, el ángulo de ataque también es mayor en viraje. Vuelo horizontal rectilíneo uniforme Viraje horizontal P4.I Introducción a la Ingeniería Aeroespacial 46
47 Actuaciones Integrales - I El problema de las actuaciones integrales de un avión es el estudio del movimiento del avión entre los puntos inicial y final de su trayectoria, para una carga de combustible dada: es decir, la trayectoria del avión es analizada de forma global. La trayectoria viene definida por la siguiente relación cinemática con respecto a un sistema inercial Velocidad total (ground speed) Se van a considerar dos actuaciones integrales concretas, en vuelo simétrico, horizontal, rectilíneo y con el aire en calma (V g = V ): Alcance: distancia recorrida respecto a tierra. Autonomía: tiempo que la aeronave se mantiene en vuelo. Las ecuaciones del movimiento son L = W y D = T, ecuaciones en las que se desprecian las fuerzas de inercia debidas a las variaciones de V con el tiempo (en caso de haberlas) Introducción a la Ingeniería Aeroespacial 47
48 Actuaciones Integrales - II El peso del avión en un instante dado puede escribirse de la siguiente forma: W S es el peso fijo (estructura, tripulación, etc.) W F (t) es el peso de combustible en dicho instante. El peso total disminuye con el tiempo debido al consumo de combustible. El parámetro que define el consumo del motor es el consumo específico (c E ): Para un turbojet, se define como: peso de combustible consumido por unidad de tiempo y por unidad de empuje suministrado. Para aviones propulsados por hélice con motor alternativo: peso de combustible consumido por unidad de tiempo y por unidad de potencia generada. Introducción a la Ingeniería Aeroespacial 48
49 Actuaciones Integrales - III Pizarra Las ecuaciones que describen la variación de la distancia recorrida y del peso del avión con el tiempo son: Variación de la distancia recorrida y del peso con el tiempo Se toma el peso del avión como variable independiente Alcance Integral entre peso inicial y final Autonomía La definición de eficiencia aerodinámica se tiene cuenta. cuanto menor sea c E y cuanto mayor sea la eficiencia aerodinámica, mayores serán el alcance y la autonomía. Para calcular las integrales es necesario especificar un programa de vuelo (ley de pilotaje), en el que se defina la variación de las variables V, E y c E con W. Un ejemplo sencillo consiste en: considerar c E constante volar a Angulo de ataque constante en tal caso hay que variar el empuje durante el vuelo. Introducción a la Ingeniería Aeroespacial 49
50 Introducción a la Ingeniería Aeroespacial 50 Actuaciones Integrales Autonomía - I Autonomía en vuelo con ángulo de ataque constante: La condición de vuelo = const equivale a C L = const C L = const equivale a tiene C D = const E = const. Se supone además c E = const. La autonomía viene dada por Pizarra Peso combustible Interesa que c E sea pequeño, E grande y W F /W S grande; no influye. Peso total El ángulo de ataque que maximiza la autonomía es el que maximiza la eficiencia aerodinámica, esto es, el que corresponde a C Lopt
51 Introducción a la Ingeniería Aeroespacial 51 Actuaciones Integrales Alcance - I Alcance en vuelo con ángulo de ataque constante: La condición de vuelo = const equivale a C L = const C L = const equivale a tiene C D = const E = const. Se supone además c E = const. Para el alcance es necesario relacionar V y W tal que Pizarra Interesa que c E sea pequeño, E grande y W S /S y W F /W S grandes Maximizar. El ángulo de ataque que maximiza el alcance es menor que el que maximiza la autonomía
52 Influencia del Viento en las Actuaciones - I Cuando la velocidad del viento sea apreciable debe tenerse en cuenta, verificándose entonces V g - Velocidad absoluta del avión (respecto a la tierra) V - Velocidad aerodinámica del avión (respecto del aire) V w - Velocidad del viento (velocidad del aires respecto a la tierra) La velocidad que aparece en la 2 a Ley de Newton y en la ecuación cinemática de la trayectoria es velocidad absoluta, mientras que la que aparece en las expresiones de las fuerzas aerodinámicas (sustentación y resistencia) es velocidad aerodinámica. Fuerza aerodinámica Velocidad del centro de masas respecto a un sistema inercial Fuerza gravitatoria Masa del avión Fuerza propulsiva Introducción a la Ingeniería Aeroespacial 52
53 Introducción a la Ingeniería Aeroespacial 53 Influencia del Viento en las Actuaciones - II Vuelo horizontal, rectilíneo y uniforme en presencia de un viento horizontal y uniforme: Se supone que el viento está contenido en un plano horizontal y que su dirección y su módulo son constantes. Las ecuaciones desarrolladas anteriormente para el vuelo rectilíneo uniforme son válidas, aunque el movimiento del avión respecto a tierra no coincide con el movimiento respecto al aire El morro del avión apunta hacia una dirección distinta de la trayectoria respecto de tierra.
54 Introducción a la Ingeniería Aeroespacial 54 Influencia del Viento en las Actuaciones - III Vuelo en planeo, rectilíneo y uniforme, en presencia de una ascendencia uniforme. Se supone que el viento es vertical y que su módulo es constante. Las ecuaciones desarrolladas anteriormente para el vuelo en planeo son válidas. El planeador siempre descenderá respecto al aire, aunque, si la ascendencia es lo suficientemente intensa, podrá subir respecto de tierra.
55 Introducción a la Ingeniería Aeroespacial 55 Influencia del Viento en las Actuaciones - IV Alcance y autonomía en vuelo horizontal, rectilíneo y uniforme, con viento de cara o de cola, horizontal y uniforme. La expresión del alcance desarrollada anteriormente debe modificarse en el caso de que haya un viento horizontal uniforme de cara (en la dirección del vuelo pero en sentido contrario) o de cola (en la misma dirección y en el mismo sentido del vuelo), en la siguiente manera el signo + corresponde al viento de cola el signo al viento de cara. El alcance aumenta con el viento de cola. La autonomía no se ve influenciada por el viento. Un avión volando contra un viento de 100 Km/h a una velocidad (aerodinámica) de 100 Km/h no se movería del sitio, pero se mantendría en vuelo el mismo tiempo que se mantendría si no hubiese viento
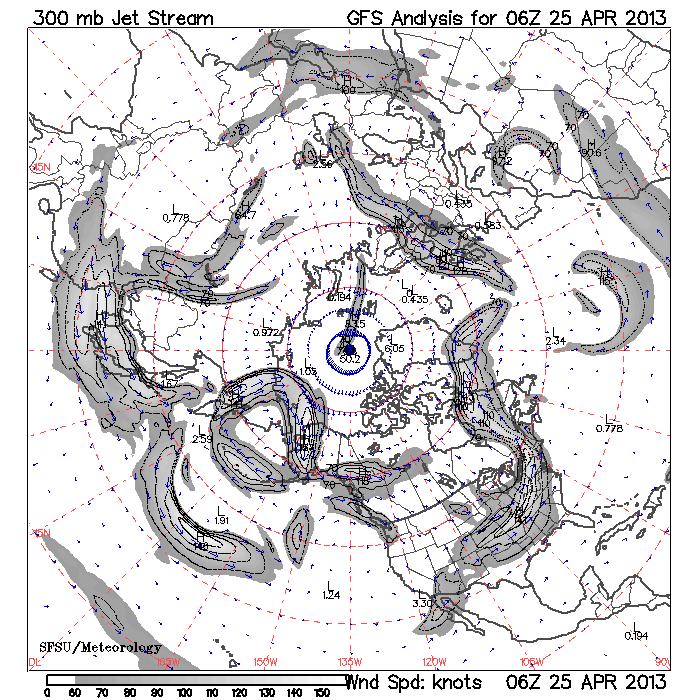
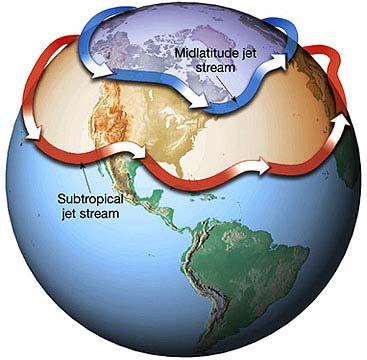


56 Introducción a la Ingeniería Aeroespacial 56 Jet Stream Qué es?
57 Despegue y Aterrizaje - I Hipótesis para despegue y aterrizaje: Aviones con tren triciclo, que son los habituales hoy en día. Se supone que el aire está en calma, ya que las normas de aeronavegabilidad exigen, por seguridad, que las distancias de despegue y aterrizaje se determinen sin viento sobre las pistas Despegue: si se despega o aterriza de cara al viento, esto es, con velocidades menores respecto a tierra, las distancias serán menores. La maniobra de despegue va desde la suelta de frenos en cabecera de pista hasta que el avión alcanza una velocidad y altura definidas en las normas de aeronavegabilidad. Esta maniobra se efectúa con empuje máximo en los motores, flaps en posición de despegue y tren de aterrizaje extendido. Se compone de varias fases: Introducción a la Ingeniería Aeroespacial 57

58 Despegue y Aterrizaje - II Introducción a la Ingeniería Aeroespacial 58
59 Despegue y Aterrizaje - II A) Rodadura en el suelo (0 V V LOF ): desde la suelta de frenos hasta que el avión alcanza la velocidad de despegue, V LOF, y deja de estar en contacto con la pista. A1) Rodadura con todas las ruedas en el suelo (0 V V R ): hasta que se alcanza la velocidad de rotación, V R, velocidad a la que se levanta el morro del avión. V R se calcula con la condición de que la reacción normal en el tren de morro sea cero;. A2) Rodadura con el tren principal en el suelo (V R V V LOF ): el avión se desplaza con el tren de morro levantado, hasta alcanzar la velocidad de despegue. V LOF se calcula con la condición de que la reacción normal en el tren principal sea cero. Habitualmente V LOF es de un 10 a un 20% mayor que la velocidad de pérdida para la configuración de despegue (Vs). Introducción a la Ingeniería Aeroespacial 59
60 Despegue y Aterrizaje - III B) Recorrido en el aire (V LOF V V 2 ): desde que el avión se va al aire hasta alcanzar una altura h=10.7 m (35 ft) y una velocidad V 2 > 1.2Vs. B1) Tramo de transición curvilíneo (V V LOF ): desde que el avión deja de estar en contacto con la pista hasta que alcanza el ángulo de subida deseado. Este tramo puede considerarse como un arco de circunferencia, con V constante. B2) Subida rectilínea acelerada (V LOF V V 2 ): el avión se acelera en una subida rectilínea hasta alcanzar la velocidad V 2 a la altura h. Introducción a la Ingeniería Aeroespacial 60
61 Despegue y Aterrizaje - IV Aterrizaje: La maniobra de aterrizaje puede considerarse como un despegue invertido. Esta maniobra se efectúa con empuje muy pequeño (empuje residual), nulo o incluso negativo (reversa) Interesa tener una resistencia lo más alta posible, por lo que se sacan spoilers, paracaídas, etc., se aplican frenos al tren de aterrizaje, los flaps están en posición de aterrizaje y el tren extendido Introducción a la Ingeniería Aeroespacial 61
62 Despegue y Aterrizaje - V A) Recorrido en el aire (V A V V TD ): desde que el avión alcanza una velocidad V A y una altura h determinadas por las normas, hasta que entra en contacto con el suelo. A1) Aproximación final: trayectoria rectilínea, que se inicia con velocidad V A 1.3 V s, V s, : velocidad de pérdida en la configuración de aterrizaje, desde una altura h=15.2 m (50 ft). A2) Redondeo: trayectoria que puede suponerse un arco de circunferencia. el desplome del avión se produce a la velocidad V TD 1.15 V s. B) Rodadura en el suelo (V TD V 0): desde que el avión toca el suelo hasta que se para. B1) Rodadura con el tren de morro levantado (análoga al caso de despegue). B2) Rodadura con todas las ruedas en el suelo (análoga al caso de despegue). Problema 11 Introducción a la Ingeniería Aeroespacial 62
 V3 (Antonov 225 at Geilenkirchen NATO airbase) V4 (Airbus A380 crosswind landing) V5 (Boeing 787 Farnborough")
63 Introducción a la Ingeniería Aeroespacial 63 Aterrizajes con viento cruzado V1 (Top 10 Airplane Crosswind) V2 (St. Maarten KLM Boeing 747 landing) V3 (Antonov 225 at Geilenkirchen NATO airbase) V4 (Airbus A380 crosswind landing) V5 (Boeing 787 Farnborough 2012 Display TO & LND) Videos
64 Bibliografía [And00] J.D. Anderson. Introduction to flight. McGraw Hill, [Riv07] Damián Rivas. Aeronaves y Vehículos Espaciales, Febrero de Introducción a la Ingeniería Aeroespacial 64
Mecánica del Vuelo del Avión
 Mecánica del Vuelo del Avión Parte I: Actuaciones del Avión Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos Escuela Superior de Ingeniería
Mecánica del Vuelo del Avión Parte I: Actuaciones del Avión Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos Escuela Superior de Ingeniería
Mecánica del Vuelo del Avión
 Mecánica del Vuelo del Avión Parte I: Actuaciones del Avión Sergio Esteban Roncero Francisco Gavilán Jiménez Escuela Superior de Ingenieros Universidad de Sevilla Curso 2007-2008 23/03/2009 Aeronaves y
Mecánica del Vuelo del Avión Parte I: Actuaciones del Avión Sergio Esteban Roncero Francisco Gavilán Jiménez Escuela Superior de Ingenieros Universidad de Sevilla Curso 2007-2008 23/03/2009 Aeronaves y
Mecánica del Vuelo del Avión
 Mecánica del Vuelo del Avión Parte I: Actuaciones del Avión Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos Escuela Superior de Ingenieros
Mecánica del Vuelo del Avión Parte I: Actuaciones del Avión Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos Escuela Superior de Ingenieros
Mecánica del Vuelo del Avión
 Mecánica del Vuelo del Avión Parte I: Actuaciones del Avión Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos Escuela Superior de Ingenieros
Mecánica del Vuelo del Avión Parte I: Actuaciones del Avión Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos Escuela Superior de Ingenieros
PROBLEMAS. Problema 1
 PROBLEMAS Problema 1 Se considera un avión en vuelo de crucero a altitud h y velocidad V constantes. La altitud de vuelo está fijada. Sabiendo que la resistencia aerodinámica viene dada por D = k 1 V 2
PROBLEMAS Problema 1 Se considera un avión en vuelo de crucero a altitud h y velocidad V constantes. La altitud de vuelo está fijada. Sabiendo que la resistencia aerodinámica viene dada por D = k 1 V 2
Mecánica del Vuelo del Avión
 Mecánica del Vuelo del Avión Parte II: Estabilidad y Control Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos Escuela Superior de Ingeniería
Mecánica del Vuelo del Avión Parte II: Estabilidad y Control Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos Escuela Superior de Ingeniería
Mecánica del Vuelo del Avión
 Mecánica del Vuelo del Avión Parte II: Estabilidad y Control Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos Escuela Superior de Ingenieros
Mecánica del Vuelo del Avión Parte II: Estabilidad y Control Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos Escuela Superior de Ingenieros
Módulo 9 MECÁNICA DEL VUELO
 Módulo 9 MECÁNICA DEL VUELO Primera parte: INTRODUCCIÓN 3 1.VISIÓN GENERAL: 2. SISTEMAS DE REFERENCIA: Sistema de ejes Horizonte Local F h Sistema de ejes Viento F w Origen en el centro de masas del avión
Módulo 9 MECÁNICA DEL VUELO Primera parte: INTRODUCCIÓN 3 1.VISIÓN GENERAL: 2. SISTEMAS DE REFERENCIA: Sistema de ejes Horizonte Local F h Sistema de ejes Viento F w Origen en el centro de masas del avión
2. CO CEPTOS BÁSICOS SOBRE AERO AVES
 2. CO CEPTOS BÁSICOS SOBRE AERO AVES 2.1. PRINCIPIOS AERODINÁMICOS Sobre una aeronave actúan varias fuerzas, algunas favorables y otras desfavorables. Las fuerzas básicas que actúan sobre una aeronave
2. CO CEPTOS BÁSICOS SOBRE AERO AVES 2.1. PRINCIPIOS AERODINÁMICOS Sobre una aeronave actúan varias fuerzas, algunas favorables y otras desfavorables. Las fuerzas básicas que actúan sobre una aeronave
Introducción a la Ing. Aeroespacial
 Introducción a la Ing. Aeroespacial Tema 5 Propulsión Aérea Parte II: Propulsión por Hélice Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos
Introducción a la Ing. Aeroespacial Tema 5 Propulsión Aérea Parte II: Propulsión por Hélice Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos
Mecánica del Vuelo. Tema 3: Actuaciones de Punto. Damián Rivas Rivas y Sergio Esteban Roncero
 Intro Vuelo Sim-PV Mecánica del Vuelo Tema 3: Actuaciones de Punto Damián Rivas Rivas y Sergio Esteban Roncero Departamento de Ingeniería Aeroespacial Escuela Técnica Superior de Ingeniería, Universidad
Intro Vuelo Sim-PV Mecánica del Vuelo Tema 3: Actuaciones de Punto Damián Rivas Rivas y Sergio Esteban Roncero Departamento de Ingeniería Aeroespacial Escuela Técnica Superior de Ingeniería, Universidad
Problemas - Aeronaves
 Chapter Problemas - Aeronaves. Problema A. Se considera una avioneta con tren fijo en vuelo simétrico, sin balance, en un plano vertical, conla atmósfera en calma, a un nivel de vuelo dado y en configuración
Chapter Problemas - Aeronaves. Problema A. Se considera una avioneta con tren fijo en vuelo simétrico, sin balance, en un plano vertical, conla atmósfera en calma, a un nivel de vuelo dado y en configuración
Actuaciones. Aterrizaje y Despegue. Referencia Básica [EMC05] Helicópteros () Actuaciones Aterrizaje y despegue 1 / 27
![Actuaciones. Aterrizaje y Despegue. Referencia Básica [EMC05] Helicópteros () Actuaciones Aterrizaje y despegue 1 / 27](/thumbs/60/44967248.jpg "Actuaciones. Aterrizaje y Despegue. Referencia Básica [EMC05] Helicópteros () Actuaciones Aterrizaje y despegue 1 / 27") Actuaciones Aterrizaje y Despegue. Referencia Básica [EMC05] Helicópteros () Actuaciones Aterrizaje y despegue 1 / 27 Introducción Desde el punto de vista de la maniobrabilidad, el helicóptero es una de
Actuaciones Aterrizaje y Despegue. Referencia Básica [EMC05] Helicópteros () Actuaciones Aterrizaje y despegue 1 / 27 Introducción Desde el punto de vista de la maniobrabilidad, el helicóptero es una de
MATERIA: AERODINÁMICA CONTROLADORES DE TRANSITO AÉREO
 MATERIA: AERODINÁMICA CONTROLADORES DE TRANSITO AÉREO 1. EL FACTOR DE CARGA MÁXIMO (NMAX) ES UNA LIMITACIÓN ESTRUCTURAL ESTABLECIDA POR EL FABRICANTE Y ASENTADA EN LA SECCIÓN DE LIMITACIONES DEL MANUAL
MATERIA: AERODINÁMICA CONTROLADORES DE TRANSITO AÉREO 1. EL FACTOR DE CARGA MÁXIMO (NMAX) ES UNA LIMITACIÓN ESTRUCTURAL ESTABLECIDA POR EL FABRICANTE Y ASENTADA EN LA SECCIÓN DE LIMITACIONES DEL MANUAL
Introducción a la Ing. Aeroespacial
 Introducción a la Ing. Aeroespacial Tema 5 Propulsión Aérea Parte II: Propulsión por Hélice Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos
Introducción a la Ing. Aeroespacial Tema 5 Propulsión Aérea Parte II: Propulsión por Hélice Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos
Ejercicio = 216,65 K; P 0. /S para resolver el problema. SOLUCIÓN: Condición de vuelo: M 0
 Ejercicio Calcular el exceso de potencia específica y la relación empuje/peso que tiene que tener un avión comercial para que en condiciones de crucero: M 0 = 0,85; a = 11000 m (T 0 = 216,65 K; P 0 = 22,6345
Ejercicio Calcular el exceso de potencia específica y la relación empuje/peso que tiene que tener un avión comercial para que en condiciones de crucero: M 0 = 0,85; a = 11000 m (T 0 = 216,65 K; P 0 = 22,6345
MATERIA: AERODINÁMICA TRIPULANTES DE CABINA
 MATERIA: AERODINÁMICA TRIPULANTES DE CABINA 1. CUANDO HABLAMOS DE LA RAMA DE LA FÍSICA, QUE ESTUDIA LAS REACCIONES DE UN CUERPO QUE SE SITÚA EN UNA CORRIENTE DE AIRE, O AIRE RELATIVO CON RESPECTO A SUS
MATERIA: AERODINÁMICA TRIPULANTES DE CABINA 1. CUANDO HABLAMOS DE LA RAMA DE LA FÍSICA, QUE ESTUDIA LAS REACCIONES DE UN CUERPO QUE SE SITÚA EN UNA CORRIENTE DE AIRE, O AIRE RELATIVO CON RESPECTO A SUS
ACTUACIONES VUELO-4. 10) El aumento de flaps hace que la resistencia: a) Aumente. b) Disminuya. c) Permanezca constante.
 El aumento de flaps hace que la resistencia: a) Aumente. b) Disminuya. c) Permanezca constante.") 1) La altitud de presión se define como: a) La presión que marca el altímetro que se ha reglado a la elevación del aeródromo. b) La presión que marca el altímetro que se ha reglado al nivel del mar con
1) La altitud de presión se define como: a) La presión que marca el altímetro que se ha reglado a la elevación del aeródromo. b) La presión que marca el altímetro que se ha reglado al nivel del mar con
Descripción del problema
 4 Descripción del problema control_gamma MATLAB Function uje masa alpha_punto xa In1 ya Va gamma In2 theta q In3 alpha_p CL CD In4 Cm Dinámica sistema q m masa -Cmasa on masa1 grator2 1 s control_ft MATLAB
4 Descripción del problema control_gamma MATLAB Function uje masa alpha_punto xa In1 ya Va gamma In2 theta q In3 alpha_p CL CD In4 Cm Dinámica sistema q m masa -Cmasa on masa1 grator2 1 s control_ft MATLAB
Centro de presiones, centro aerodinámico y cuerda media aerodinámica
 Centro de presiones, centro aerodinámico y cuerda media aerodinámica Apellidos y nombre: García-Cuevas González, Luis Miguel (luiga12@mot.upv.es) 1 Carreres Talens, Marcos (marcarta@mot.upv.es) 1 Tiseira
Centro de presiones, centro aerodinámico y cuerda media aerodinámica Apellidos y nombre: García-Cuevas González, Luis Miguel (luiga12@mot.upv.es) 1 Carreres Talens, Marcos (marcarta@mot.upv.es) 1 Tiseira
Revisión de Tareas para la 3ª Entrega
 1 Revisión de Tareas para la 3ª Entrega Sergio Esteban Roncero Departamento de Ingeniería Aeroespacial Y Mecánica de Fluidos Revisión de las diferentes áreas Aerodinámica Estructuras y Pesos Estabilidad
1 Revisión de Tareas para la 3ª Entrega Sergio Esteban Roncero Departamento de Ingeniería Aeroespacial Y Mecánica de Fluidos Revisión de las diferentes áreas Aerodinámica Estructuras y Pesos Estabilidad
Introducción a la Ing. Aeroespacial
 Introducción a la Ing. Aeroespacial Tema 12 Misiones Espaciales Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos Escuela Superior de Ingeniería
Introducción a la Ing. Aeroespacial Tema 12 Misiones Espaciales Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos Escuela Superior de Ingeniería
DISEÑO DE UN UAV LIGERO DE PROPULSIÓN ELÉCTRICA PARA MONITORIZACIÓN MEDIOAMBIENTAL
 Escuela Superior de Ingenieros Universidad de Sevilla DISEÑO DE UN UAV LIGERO DE PROPULSIÓN ELÉCTRICA PARA MONITORIZACIÓN MEDIOAMBIENTAL Noviembre_2010 Autor: Tutor: Aníbal Ollero Baturone Agradecimientos
Escuela Superior de Ingenieros Universidad de Sevilla DISEÑO DE UN UAV LIGERO DE PROPULSIÓN ELÉCTRICA PARA MONITORIZACIÓN MEDIOAMBIENTAL Noviembre_2010 Autor: Tutor: Aníbal Ollero Baturone Agradecimientos
3. Cinemática de la partícula: Sistemas de referencia
 3. Cinemática de la partícula: Sistemas de referencia 3.1.- Cinemática de la partícula 3.2.- Coordenadas intrínsecas y polares 3.3.- Algunos casos particulares de especial interés 3.1.- Cinemática de la
3. Cinemática de la partícula: Sistemas de referencia 3.1.- Cinemática de la partícula 3.2.- Coordenadas intrínsecas y polares 3.3.- Algunos casos particulares de especial interés 3.1.- Cinemática de la
MATERIA: AERODINÁMICA ULTRALIVIANO
 MATERIA: AERODINÁMICA ULTRALIVIANO 1. LA LÍNEA RECTA QUE UNE EL BORDE DE ATAQUE CON EL BORDE DE SALIDA DE UN PERFIL ALAR, SE DENOMINA: a. CURVATURA MEDIA b. CUERDA c. ESPESOR d. VIENTO RELATIVO 2. VIENTO
MATERIA: AERODINÁMICA ULTRALIVIANO 1. LA LÍNEA RECTA QUE UNE EL BORDE DE ATAQUE CON EL BORDE DE SALIDA DE UN PERFIL ALAR, SE DENOMINA: a. CURVATURA MEDIA b. CUERDA c. ESPESOR d. VIENTO RELATIVO 2. VIENTO
1. Características del movimiento
 CINEMÁTICA TEMA 1 1. Características del movimiento En el universo todo está en continuo movimiento. Movimiento es el cambio de posición de un cuerpo a lo largo del tiempo respecto a un sistema de referencia
CINEMÁTICA TEMA 1 1. Características del movimiento En el universo todo está en continuo movimiento. Movimiento es el cambio de posición de un cuerpo a lo largo del tiempo respecto a un sistema de referencia
Tema 4: Movimiento en 2D y 3D
 Tema 4: Movimiento en 2D y 3D FISICA I, 1º Grado en Ingeniería Electrónica, Robótica y Mecatrónica Departamento de Física Aplicada III Escuela Técnica Superior de Ingeniería Universidad de Sevilla Índice
Tema 4: Movimiento en 2D y 3D FISICA I, 1º Grado en Ingeniería Electrónica, Robótica y Mecatrónica Departamento de Física Aplicada III Escuela Técnica Superior de Ingeniería Universidad de Sevilla Índice
MATERIA: TÉCNICAS DE VUELO ULTRALIVIANO
 MATERIA: TÉCNICAS DE VUELO ULTRALIVIANO 1. SI LA DENSIDAD DEL AIRE DISMINUYE: a. DISMINUYE LA RESISTENCIA b. AUMENTA LA SUSTENTACIÓN c. AUMENTA LA TRACCIÓN DE LA HÉLICE d. AUMENTA LA RESISTENCIA 2. EL
MATERIA: TÉCNICAS DE VUELO ULTRALIVIANO 1. SI LA DENSIDAD DEL AIRE DISMINUYE: a. DISMINUYE LA RESISTENCIA b. AUMENTA LA SUSTENTACIÓN c. AUMENTA LA TRACCIÓN DE LA HÉLICE d. AUMENTA LA RESISTENCIA 2. EL
Asignatura: MECÁNICA DEL VUELO (Código 153) AERONAVES
 AERONAVES") Asignatura: MECÁNICA DEL VUELO (Código 153) Especialidad: AERONAVES Curso/Cuatrimestre: TERCER CURSO / PRIMER CUATRIMESTRE Tipo de Materia: TRONCAL Créditos: 7,5 Conocimientos previos: Departamento: Aerotecnia,
Asignatura: MECÁNICA DEL VUELO (Código 153) Especialidad: AERONAVES Curso/Cuatrimestre: TERCER CURSO / PRIMER CUATRIMESTRE Tipo de Materia: TRONCAL Créditos: 7,5 Conocimientos previos: Departamento: Aerotecnia,
DOCUMENTACIÓN DE CONSULTA PARA LA PRUEBA DE CONOCIMIENTOS BÁSICOS, SOBRE MATERIAS NO ESPECÍFICAS DEL CONTROL DE TRÁFICO AÉREO. TEMA: MECÁNICA DE VUELO
 Convocatoria de Becas para el Curso Básico de Formación de Controladores de la Circulación Aérea, (año 2001). DOCUMENTACIÓN DE CONSULTA PARA LA PRUEBA DE CONOCIMIENTOS BÁSICOS, SOBRE MATERIAS NO ESPECÍFICAS
Convocatoria de Becas para el Curso Básico de Formación de Controladores de la Circulación Aérea, (año 2001). DOCUMENTACIÓN DE CONSULTA PARA LA PRUEBA DE CONOCIMIENTOS BÁSICOS, SOBRE MATERIAS NO ESPECÍFICAS
CÁLCULO DE AVIONES. Grupo 1
 CÁLCULO DE AVIONES Grupo 1 ÍNDICE 0. Empresa y Departamentos 1. Hidrógeno -1.1 Por qué hidrógeno? -1.2 Hidrógeno en el mundo 2. Diseño - 2.1 Evolución del diseño - 2.2 Diseño completo CAD 3. Propulsión
CÁLCULO DE AVIONES Grupo 1 ÍNDICE 0. Empresa y Departamentos 1. Hidrógeno -1.1 Por qué hidrógeno? -1.2 Hidrógeno en el mundo 2. Diseño - 2.1 Evolución del diseño - 2.2 Diseño completo CAD 3. Propulsión
ENTREGA FINAL Cálculo de Aviones 5º Ing. Aeronaútica Escuela Superior Ingenieros Universidad de Sevil a
 ENTREGA FINAL Cálculo de Aviones 5º Ing. Aeronaútica Escuela Superior Ingenieros Universidad de Sevilla ÍNDICE 1. Diseño 2. Estructuras 3. Actuaciones y Propulsión 4. Estabilidad y Control 5. Aerodinámica
ENTREGA FINAL Cálculo de Aviones 5º Ing. Aeronaútica Escuela Superior Ingenieros Universidad de Sevilla ÍNDICE 1. Diseño 2. Estructuras 3. Actuaciones y Propulsión 4. Estabilidad y Control 5. Aerodinámica
PUCMM FIS 101 Prof. Remigia cabrera Genao 2014
 Posición (m) Unidad II. Cinemática Rectilínea PROBLEMAS PARA RESOLVER EN LA CLASE 1. Para el móvil del gráfico determine lo que se le pide abajo, si se mueve en una recta nortesur: 7.00 6.00 5.00 4.00
Posición (m) Unidad II. Cinemática Rectilínea PROBLEMAS PARA RESOLVER EN LA CLASE 1. Para el móvil del gráfico determine lo que se le pide abajo, si se mueve en una recta nortesur: 7.00 6.00 5.00 4.00
Momento angular de una partícula. Momento angular de un sólido rígido
 Momento angular de una partícula Se define momento angular de una partícula respecto de del punto O, como el producto vectorial del vector posición r por el vector momento lineal mv L=r mv Momento angular
Momento angular de una partícula Se define momento angular de una partícula respecto de del punto O, como el producto vectorial del vector posición r por el vector momento lineal mv L=r mv Momento angular
TEMA II: CINEMÁTICA I
 1 TEMA II: CINEMÁTICA I 1- LA MECÁNICA La Mecánica es la parte de la física que estudia el movimiento de los cuerpos. Puede subdividirse en dos bloques: Cinemática: trata el movimiento sin ocuparse de
1 TEMA II: CINEMÁTICA I 1- LA MECÁNICA La Mecánica es la parte de la física que estudia el movimiento de los cuerpos. Puede subdividirse en dos bloques: Cinemática: trata el movimiento sin ocuparse de
Indice. Cinemática de la Partícula Introducción
 Indice Cinemática de la Partícula Introducción Un fenómeno que siempre está presente y que observamos a nuestro alrededor es el movimiento. La cinemática es la parte de la Física que describe los posibles
Indice Cinemática de la Partícula Introducción Un fenómeno que siempre está presente y que observamos a nuestro alrededor es el movimiento. La cinemática es la parte de la Física que describe los posibles
FÍSICA Y QUÍMICA 1º Bachillerato Ejercicios: Cinemática
 1(7) Ejercicio nº 1 Los vectores de posición de un móvil en dos instantes son Calcula el vector desplazamiento y el espacio recorrido. R1 = -i + 10j y R2 = 2i + 4 j Ejercicio nº 2 Un móvil, que tiene un
1(7) Ejercicio nº 1 Los vectores de posición de un móvil en dos instantes son Calcula el vector desplazamiento y el espacio recorrido. R1 = -i + 10j y R2 = 2i + 4 j Ejercicio nº 2 Un móvil, que tiene un
FÍSICA Y QUÍMICA Cinemática
 1(7) Ejercicio nº 1 Los vectores de posición de un móvil en dos instantes son Calcula el vector desplazamiento y el espacio recorrido. v R1 r r v r r = -i + 10j y R2 = 2i + 4 j Ejercicio nº 2 Un móvil,
1(7) Ejercicio nº 1 Los vectores de posición de un móvil en dos instantes son Calcula el vector desplazamiento y el espacio recorrido. v R1 r r v r r = -i + 10j y R2 = 2i + 4 j Ejercicio nº 2 Un móvil,
CINEMÁTICA. Vector de Posición. Vector Desplazamiento = Movimiento
 CINEMÁTICA Se denomina Cinemática, a la parte de la Mecánica, que se encarga de estudiar, el movimiento de los cuerpos, sin considerar las causas que lo producen, ni la masa del cuerpo que se mueve. Partícula.-
CINEMÁTICA Se denomina Cinemática, a la parte de la Mecánica, que se encarga de estudiar, el movimiento de los cuerpos, sin considerar las causas que lo producen, ni la masa del cuerpo que se mueve. Partícula.-
Tema 4: Movimiento en 2D y 3D
 Tema 4: Movimiento en 2D y 3D FISICA I, 1º Grado en Civil Escuela Técnica Superior de Ingeniería Universidad de Sevilla Física I, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2017/18 1
Tema 4: Movimiento en 2D y 3D FISICA I, 1º Grado en Civil Escuela Técnica Superior de Ingeniería Universidad de Sevilla Física I, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2017/18 1
FÍSICA- Gymnasium-4ºB. Movimiento Curvilíneo (Notas Teóricas y Preguntas/Problemas para 13/08/2014)
") Movimiento curvilineo: (apunte a completar en clase) Movimiento en el plano XY; se sitúa un sistema de coordenadas y se representa la trayectoria del móvil (conjunto de puntos del plano por los que pasa
Movimiento curvilineo: (apunte a completar en clase) Movimiento en el plano XY; se sitúa un sistema de coordenadas y se representa la trayectoria del móvil (conjunto de puntos del plano por los que pasa
CINEMÁTICA. Cinemática del punto
 CINEMÁTICA La Cinemática es la parte de la Mecánica que estudia el movimiento de los cuerpos, prescindiendo de las causas que lo producen El objetivo de la cinemática es averiguar en cualquier instante
CINEMÁTICA La Cinemática es la parte de la Mecánica que estudia el movimiento de los cuerpos, prescindiendo de las causas que lo producen El objetivo de la cinemática es averiguar en cualquier instante
Ecuaciones del vuelo de crucero (vuelo simétrico en un plano vertical): dx dt = V dh dt = V γ 0 = T (h, V, π) D(h, V, L) 0 = L W dw dt
: dx dt = V dh dt = V γ 0 = T (h, V, π) D(h, V, L) 0 = L W dw dt") TEMA 4 ACTUACIONES INTEGRALES 4. Actuaciones integrales en crucero Hipótesis de crucero: vuelo casi estacionario: aceleraciones despreciables ( V 0, γ 0), ángulo de trayectoria muy pequeño: γ, γ D. Ecuaciones
TEMA 4 ACTUACIONES INTEGRALES 4. Actuaciones integrales en crucero Hipótesis de crucero: vuelo casi estacionario: aceleraciones despreciables ( V 0, γ 0), ángulo de trayectoria muy pequeño: γ, γ D. Ecuaciones
2 o Bachillerato. Conceptos básicos
 Física 2 o Bachillerato Conceptos básicos Movimiento. Cambio de posición de un cuerpo respecto de un punto que se toma como referencia. Cinemática. Parte de la Física que estudia el movimiento de los cuerpos
Física 2 o Bachillerato Conceptos básicos Movimiento. Cambio de posición de un cuerpo respecto de un punto que se toma como referencia. Cinemática. Parte de la Física que estudia el movimiento de los cuerpos
Parte I Problemas Aeronaves
 Parte I Problemas Aeronaves 2 Problema Se considera una avioneta con tren fijo en vuelo simétrico, sin balance, en un plano vertical, con la atmósfera en calma, a un nivel de vuelo dado y en configuración
Parte I Problemas Aeronaves 2 Problema Se considera una avioneta con tren fijo en vuelo simétrico, sin balance, en un plano vertical, con la atmósfera en calma, a un nivel de vuelo dado y en configuración
ESTRUCTURA GENERAL DEL CURSO PARA LA OBTENCION DEL CARNET DE PILOTO DE ULTRALIGERO. PROGRAMA DE ENSEÑANZA DEL CURSO.
 ESCUELA DE VUELO SAN TORCUATO ESTRUCTURA GENERAL DEL CURSO PARA LA OBTENCION DEL CARNET DE PILOTO DE ULTRALIGERO. PROGRAMA DE ENSEÑANZA DEL CURSO. A.- CURSO TEORICO I. 1.- Teoría elemental. 1.1.- Introducción.
ESCUELA DE VUELO SAN TORCUATO ESTRUCTURA GENERAL DEL CURSO PARA LA OBTENCION DEL CARNET DE PILOTO DE ULTRALIGERO. PROGRAMA DE ENSEÑANZA DEL CURSO. A.- CURSO TEORICO I. 1.- Teoría elemental. 1.1.- Introducción.
Tema 6: Cinemática del sólido rígido
 Tema 6: Cinemática del sólido rígido FISICA I, 1º Grado en Ingeniería Aeroespacial Escuela Técnica Superior de Ingenieros Universidad de Sevilla 1 Índice Introducción Condición geométrica de rigidez Grados
Tema 6: Cinemática del sólido rígido FISICA I, 1º Grado en Ingeniería Aeroespacial Escuela Técnica Superior de Ingenieros Universidad de Sevilla 1 Índice Introducción Condición geométrica de rigidez Grados
Simulador del UAV. control_gamma MATLAB Function. masa. alpha_punto. Dinámica sistema. theta. masa. masa1. gamma. -Cmasa. control_ft MATLAB Function
 6 Simulador del UAV control_gamma MATLAB Function uje masa alpha_punto xa In1 ya Va gamma In2 theta q In3 alpha_p CL CD In4 Cm Dinámica sistema q m masa -Cmasa on masa1 grator2 1 s control_ft MATLAB Function
6 Simulador del UAV control_gamma MATLAB Function uje masa alpha_punto xa In1 ya Va gamma In2 theta q In3 alpha_p CL CD In4 Cm Dinámica sistema q m masa -Cmasa on masa1 grator2 1 s control_ft MATLAB Function
PRINCIPIOS DE VUELO-4
 1) El ángulo de ataque es: a) El ángulo formado entre la cuerda aerodinámica y el eje longitudinal del avión b) El ángulo formado entre la cuerda aerodinámica y la dirección del viento relativo c) El ángulo
1) El ángulo de ataque es: a) El ángulo formado entre la cuerda aerodinámica y el eje longitudinal del avión b) El ángulo formado entre la cuerda aerodinámica y la dirección del viento relativo c) El ángulo
CINEMÁTICA 1. Sistema de referencia. 2. Trayectoria. 3. Velocidad. 4. Aceleración. 5. Movimientos simples. 6. Composición de movimientos.
 CINEMÁTICA 1. Sistema de referencia. 2. Trayectoria. 3. Velocidad. 4. Aceleración. 5. Movimientos simples. 6. Composición de movimientos. Física 1º bachillerato Cinemática 1 CINEMÁTICA La cinemática es
CINEMÁTICA 1. Sistema de referencia. 2. Trayectoria. 3. Velocidad. 4. Aceleración. 5. Movimientos simples. 6. Composición de movimientos. Física 1º bachillerato Cinemática 1 CINEMÁTICA La cinemática es
Departamento de Física Aplicada III Escuela Técnica Superior de Ingeniería
 Departamento de Física Aplicada III Escuela Técnica Superior de Ingeniería Grado en Ingeniería Aeroespacial Física I Segunda prueba de control, Enero 2016. Curso 2015/16 Nombre: DNI: Este test se recogerá
Departamento de Física Aplicada III Escuela Técnica Superior de Ingeniería Grado en Ingeniería Aeroespacial Física I Segunda prueba de control, Enero 2016. Curso 2015/16 Nombre: DNI: Este test se recogerá
Mediante este programa se persigue desarrollar las siguientes habilidades:
 PROPÓSITO: El programa de esta asignatura está dirigido a los estudiantes del primer semestre de la Facultad de Ingeniería, con la finalidad de ofrecerles una capacitación teórica práctica en los principios
PROPÓSITO: El programa de esta asignatura está dirigido a los estudiantes del primer semestre de la Facultad de Ingeniería, con la finalidad de ofrecerles una capacitación teórica práctica en los principios
AERONAVES Y VEHÍCULOS ESPACIALES 1º INGENIERO AERONÁUTICO. PLAN 2002 Cursos 2010/11, 2011/12, 2012/13
 PROYECTO DOCENTE: AERONAVES Y VEHÍCULOS ESPACIALES 1º INGENIERO AERONÁUTICO. PLAN 2002 Cursos 2010/11, 2011/12, 2012/13 DATOS BÁSICOS DE LA ASIGNATURA Titulación: INGENIERO AERONÁUTICO (Plan 2002) Año
PROYECTO DOCENTE: AERONAVES Y VEHÍCULOS ESPACIALES 1º INGENIERO AERONÁUTICO. PLAN 2002 Cursos 2010/11, 2011/12, 2012/13 DATOS BÁSICOS DE LA ASIGNATURA Titulación: INGENIERO AERONÁUTICO (Plan 2002) Año
Tema 1: Cinemática del sólido rígido
 Tema 1: Cinemática del sólido rígido Mecánica Racional, 2º, Grado en Ingeniería Civil Escuela Técnica Superior de Ingenieros Universidad de Sevilla 1 Índice Introducción Condición geométrica de rigidez
Tema 1: Cinemática del sólido rígido Mecánica Racional, 2º, Grado en Ingeniería Civil Escuela Técnica Superior de Ingenieros Universidad de Sevilla 1 Índice Introducción Condición geométrica de rigidez
Índice general. I Fundamentos 23. Índice general. Presentación. Prólogo. Nomenclatura
 Índice general Índice general Presentación Prólogo Nomenclatura V X XIII XV 1 Introducción 1 1.1. Introducción a la ingeniería aeroespacial............. 1 1.2. Clasificación de las aeronaves...................
Índice general Índice general Presentación Prólogo Nomenclatura V X XIII XV 1 Introducción 1 1.1. Introducción a la ingeniería aeroespacial............. 1 1.2. Clasificación de las aeronaves...................
CONCEPTO DE CINEMÁTICA: es el estudio del movimiento sin atender a las causas que lo producen
 CINEMÁTICA CONCEPTO DE CINEMÁTICA: es el estudio del movimiento sin atender a las causas que lo producen CONCEPTO DE MOVIMIENTO: el movimiento es el cambio de posición, de un cuerpo, con el tiempo (este
CINEMÁTICA CONCEPTO DE CINEMÁTICA: es el estudio del movimiento sin atender a las causas que lo producen CONCEPTO DE MOVIMIENTO: el movimiento es el cambio de posición, de un cuerpo, con el tiempo (este
La descripción física de un fenómeno, como por ejemplo los movimientos, se hace en términos de la constancia de determinada magnitud.
 MOVIMIENTOS EN UNA Y DOS DIMENSIONES 1 Cómo se describen los movimientos? La descripción física de un fenómeno, como por ejemplo los movimientos, se hace en términos de la constancia de determinada magnitud
MOVIMIENTOS EN UNA Y DOS DIMENSIONES 1 Cómo se describen los movimientos? La descripción física de un fenómeno, como por ejemplo los movimientos, se hace en términos de la constancia de determinada magnitud
Física y Química 4º ESO Apuntes de Cinemática página 1 de 6 CINEMATICA
 Física y Química 4º ESO Apuntes de Cinemática página 1 de 6 CINEMATICA CONCEPTOS BÁSICOS Se dice que un objeto está en movimiento cuando su posición cambia respecto a un sistema de referencia que se considera
Física y Química 4º ESO Apuntes de Cinemática página 1 de 6 CINEMATICA CONCEPTOS BÁSICOS Se dice que un objeto está en movimiento cuando su posición cambia respecto a un sistema de referencia que se considera
Departamento de Diseño
 Departamento de Diseño DISEÑO Diseños Preliminares DISEÑO Primeras Innovaciones DISEÑO Especificaciones 150 pasajeros en dos clases DISEÑO Capacidad para 168 personas en una sola clase DISEÑO Dimensionamiento
Departamento de Diseño DISEÑO Diseños Preliminares DISEÑO Primeras Innovaciones DISEÑO Especificaciones 150 pasajeros en dos clases DISEÑO Capacidad para 168 personas en una sola clase DISEÑO Dimensionamiento
ACTUACIONES VUELO-1. 5) La línea roja en un anemómetro indica: a) VNE b) VNO c) Vs1 d) Vs2
 La línea roja en un anemómetro indica: a) VNE b) VNO c) Vs1 d) Vs2") 1) Qué significado tiene en un avión, un coeficiente de planeo 7:1? a) Desciende 7 metros en un segundo. b) Recorre 7 metros en un segundo. c) Recorre 7 metros en horizontal por cada 1 metro de descenso.
1) Qué significado tiene en un avión, un coeficiente de planeo 7:1? a) Desciende 7 metros en un segundo. b) Recorre 7 metros en un segundo. c) Recorre 7 metros en horizontal por cada 1 metro de descenso.
PROBLEMAS CINEMÁTICA
 1 PROBLEMAS CINEMÁTICA 1- La ecuación de movimiento de un cuerpo es, en unidades S.I., s=t 2-2t-3. Determina su posición en los instantes t=0, t=3 y t=5 s y calcula en qué instante pasa por origen de coordenadas.
1 PROBLEMAS CINEMÁTICA 1- La ecuación de movimiento de un cuerpo es, en unidades S.I., s=t 2-2t-3. Determina su posición en los instantes t=0, t=3 y t=5 s y calcula en qué instante pasa por origen de coordenadas.
TEMA 6 DESPEGUE Y ATERRIZAJE. 6.1 Despegue
 TEMA 6 DESPEGUE Y ATERRIZAJE En este tema se analizan las maniobras de despeue y aterrizaje para aviones con tren triciclo, que son los habituales hoy en día. Se supone que el aire está en calma, ya que
TEMA 6 DESPEGUE Y ATERRIZAJE En este tema se analizan las maniobras de despeue y aterrizaje para aviones con tren triciclo, que son los habituales hoy en día. Se supone que el aire está en calma, ya que
B. REPASO DE MECÁNICA ÍNDICE
 BACHILLERATO FÍSICA B. REPASO DE MECÁNICA R. Artacho Dpto. de Física y Química B. REPASO DE MECÁNICA ÍNDICE 1. Las magnitudes cinemáticas 2. Movimientos en una dimensión. Movimientos rectilíneos 3. Movimientos
BACHILLERATO FÍSICA B. REPASO DE MECÁNICA R. Artacho Dpto. de Física y Química B. REPASO DE MECÁNICA ÍNDICE 1. Las magnitudes cinemáticas 2. Movimientos en una dimensión. Movimientos rectilíneos 3. Movimientos
Ejercicios de Vectores. R.: a) 26u, 29u, ( 1,4,8 ), (-5,4,-7), 13, ( 20,11,-8)
 26u, 29u, ( 1,4,8 ), (-5,4,-7), 13, ( 20,11,-8)") Ejercicios de Vectores 1. Dados los vectores a (-1,4,3) y b(,0,5), halla: a) mod a, mod b, a+b, a-b, a.b y a x b b) ángulo que forman c) cosenos directores de a d) proyección de a sobre b R.: a) 6u, 9u,
Ejercicios de Vectores 1. Dados los vectores a (-1,4,3) y b(,0,5), halla: a) mod a, mod b, a+b, a-b, a.b y a x b b) ángulo que forman c) cosenos directores de a d) proyección de a sobre b R.: a) 6u, 9u,
Cinemática del sólido rígido
 Cinemática del sólido rígido Teoría básica para el curso Cinemática del sólido rígido, ejercicios comentados α δ ω B B A A P r B AB A ω α O Ramírez López-Para, Pilar Loizaga Garmendia, Maider López Soto,
Cinemática del sólido rígido Teoría básica para el curso Cinemática del sólido rígido, ejercicios comentados α δ ω B B A A P r B AB A ω α O Ramírez López-Para, Pilar Loizaga Garmendia, Maider López Soto,
ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA AERONÁUTICA Y DEL ESPACIO FÍSICA I
 ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA AERONÁUTICA Y DEL ESPACIO FÍSICA I PROBLEMAS PROPUESTOS 2.- CINEMÁTICA DE LA PARTÍCULA 2 Cinemática de la partícula PROBLEMA PROPUESTO 2.1. Para la curva de ecuación
ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA AERONÁUTICA Y DEL ESPACIO FÍSICA I PROBLEMAS PROPUESTOS 2.- CINEMÁTICA DE LA PARTÍCULA 2 Cinemática de la partícula PROBLEMA PROPUESTO 2.1. Para la curva de ecuación
Aeronaves y Vehículos Espaciales
 Aeronaves y Vehículos Espaciales Tema 4 Aerodinámica del Avión Parte II - Alas en Régimen Incompresible Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica
Aeronaves y Vehículos Espaciales Tema 4 Aerodinámica del Avión Parte II - Alas en Régimen Incompresible Sergio Esteban Roncero Francisco Gavilán Jiménez Departamento de Ingeniería Aeroespacial y Mecánica
Tema 3: Cinemática del punto
 Tema 3: Cinemática del punto FISICA I, 1º Grado en Ingeniería Civil Escuela Técnica Superior de Ingeniería Universidad de Sevilla 1 Índice Introducción Ecuaciones de una curva Velocidad y aceleración Movimientos
Tema 3: Cinemática del punto FISICA I, 1º Grado en Ingeniería Civil Escuela Técnica Superior de Ingeniería Universidad de Sevilla 1 Índice Introducción Ecuaciones de una curva Velocidad y aceleración Movimientos
4-. Sean u = (2, 0, -1, 3), v = (5, 4, 7, -2), w = (6, 2, 0, 9). Determine el vector x que satisface a: 2u v + x = 7x + w.
, v = (5, 4, 7, -2), w = (6, 2, 0, 9). Determine el vector x que satisface a: 2u v + x = 7x + w.") EJERCICIOS VECTORES. 1-. Calcule la dirección de los siguientes vectores: a) v = (2, 2) d) v = (-3, -3) b) v = (-2 3, 2) e) v = (6, -6) c) v = (2, 2 3 ) f) v = (0,3) 3-. Para los siguientes vectores encuentre
EJERCICIOS VECTORES. 1-. Calcule la dirección de los siguientes vectores: a) v = (2, 2) d) v = (-3, -3) b) v = (-2 3, 2) e) v = (6, -6) c) v = (2, 2 3 ) f) v = (0,3) 3-. Para los siguientes vectores encuentre
Estudia las propiedades geométricas de las trayectorias que describen los cuerpos en movimiento mecánico, independientemente de la masa del cuerpo y
 CINEMÁTICA CINEMÁTICA (MRU) CONCEPTO DE CINEMÁTICA Estudia las propiedades geométricas de las trayectorias que describen los cuerpos en movimiento mecánico, independientemente de la masa del cuerpo y de
CINEMÁTICA CINEMÁTICA (MRU) CONCEPTO DE CINEMÁTICA Estudia las propiedades geométricas de las trayectorias que describen los cuerpos en movimiento mecánico, independientemente de la masa del cuerpo y de
TEMA 8: LA DESCRIPCION DE LOS MOVIMIENTOS: CINEMÁTICA.
 CURSO 2012/2013 DEPARTAMENTO DE CIENCIAS DE LA NATURALEZA FÍSICA Y QUIMICA 1º BACHILLERATO CIENCIAS Y TECNOLOGÍA Profesor: José Criado Ferrándiz TEMA 8: LA DESCRIPCION DE LOS MOVIMIENTOS: CINEMÁTICA. 1.
CURSO 2012/2013 DEPARTAMENTO DE CIENCIAS DE LA NATURALEZA FÍSICA Y QUIMICA 1º BACHILLERATO CIENCIAS Y TECNOLOGÍA Profesor: José Criado Ferrándiz TEMA 8: LA DESCRIPCION DE LOS MOVIMIENTOS: CINEMÁTICA. 1.
IES Francisco Giner de los Ríos 2016/2017 Física y Química 1º Bachillerato nocturno (FQ NB1B-Noct) UD 8. El movimiento
 UD 8. El movimiento") UD 8. El movimiento 1- Sistemas de referencia. 2- Magnitudes vectoriales. 3- Interpretaciones gráficas de los movimientos. 4- Componentes intrínsecas de la aceleración. 1- Sistemas de referencia: 1.1.
UD 8. El movimiento 1- Sistemas de referencia. 2- Magnitudes vectoriales. 3- Interpretaciones gráficas de los movimientos. 4- Componentes intrínsecas de la aceleración. 1- Sistemas de referencia: 1.1.
PRINCIPIOS DE VUELO-2
 1) El borde de ataque es: a) La parte trasera del ala. b) La parte frontal o delantera de un perfil alar. c) El morro del ultraligero d) La parte delantera del motor 2) Qué es el viento relativo?: a) El
1) El borde de ataque es: a) La parte trasera del ala. b) La parte frontal o delantera de un perfil alar. c) El morro del ultraligero d) La parte delantera del motor 2) Qué es el viento relativo?: a) El
COLEGIO DE LA ASUNCION AREA C. FISICA GUSTAVO MANZUR CAS
 Examen simulado de cinemática - Prueba 3 1) Considere un tren en M.R.U. Si un foco cae del techo del tren, su trayectoria será: a) Vertical b) Parabólica c) Recta oblicua d) Ninguna de las anteriores e)
Examen simulado de cinemática - Prueba 3 1) Considere un tren en M.R.U. Si un foco cae del techo del tren, su trayectoria será: a) Vertical b) Parabólica c) Recta oblicua d) Ninguna de las anteriores e)
1. INTRODUCCIÓN. MOVIMIENTO Y SISTEMA DE REFERENCIA.
 TEMA 1 CINEMÁTICA 1. INTRODUCCIÓN. MOVIMIENTO Y SISTEMA DE REFERENCIA. Un cuerpo está en movimiento cuando cambia de lugar respecto a un punto que se considera fijo, a medida que pasa el tiempo. En todo
TEMA 1 CINEMÁTICA 1. INTRODUCCIÓN. MOVIMIENTO Y SISTEMA DE REFERENCIA. Un cuerpo está en movimiento cuando cambia de lugar respecto a un punto que se considera fijo, a medida que pasa el tiempo. En todo
AERODINÁMICA Básica e Intermedia.
 Por: Mauricio Azpeitia Perez AERODINÁMICA Básica e Intermedia. Introducción. La teoría de vuelo está basada en la aerodinámica. El término aerodinámica sederiva de la combinación de dos palabras griegas:
Por: Mauricio Azpeitia Perez AERODINÁMICA Básica e Intermedia. Introducción. La teoría de vuelo está basada en la aerodinámica. El término aerodinámica sederiva de la combinación de dos palabras griegas:
DIRECCION DE PERSONAL AERONAUTICO DPTO. DE INSTRUCCION PREGUNTAS Y OPCIONES POR TEMA
 DIRECCION DE PERSONL ERONUTICO PREGUNTS Y OPCIONES POR TEM 1 TEM: 0824 Lic_TC _erodinámica ásica COD_PREG: PREG20102725 PREGUNT: Se denomina erodinámica a la ciencia que estudia las leyes que rigen el
DIRECCION DE PERSONL ERONUTICO PREGUNTS Y OPCIONES POR TEM 1 TEM: 0824 Lic_TC _erodinámica ásica COD_PREG: PREG20102725 PREGUNT: Se denomina erodinámica a la ciencia que estudia las leyes que rigen el
Física y Química 1º Bachillerato LOMCE. IES de Castuera INTRODUCCIÓN A LA CINEMÁTICA Rev 01. Mecánica. Óptica.
 Física y Química 1º Bachillerato LOMCE FyQ 1 IES de Castuera INTRODUCCIÓN A LA CINEMÁTICA 2015 2016 Rev 01 Física Clásica Mecánica Óptica Termodinámica Cinemática Dinámica Trabajo y Energía Electromagnetismo
Física y Química 1º Bachillerato LOMCE FyQ 1 IES de Castuera INTRODUCCIÓN A LA CINEMÁTICA 2015 2016 Rev 01 Física Clásica Mecánica Óptica Termodinámica Cinemática Dinámica Trabajo y Energía Electromagnetismo
David Morán de Godos Miguel Ángel Martín Sanz Vito Mario Fico Jorge Cordero Freile Anna Folch Codera Noelia Pérez Molina
 David Morán de Godos Miguel Ángel Martín Sanz Vito Mario Fico Jorge Cordero Freile Anna Folch Codera Noelia Pérez Molina Vito Mario Fico Diseño Justificación del modelo Diseño Evolución Diseño Evolución
David Morán de Godos Miguel Ángel Martín Sanz Vito Mario Fico Jorge Cordero Freile Anna Folch Codera Noelia Pérez Molina Vito Mario Fico Diseño Justificación del modelo Diseño Evolución Diseño Evolución
Cuadernillo de Física (Actividades orientativas para el examen)
") Cuadernillo de Física (Actividades orientativas para el examen) A.1 El vector de posición de un punto móvil viene dado por: r = 2ti + t 2 /2 j. a) Representa la trayectoria entre los instantes t=0 y t=4s
Cuadernillo de Física (Actividades orientativas para el examen) A.1 El vector de posición de un punto móvil viene dado por: r = 2ti + t 2 /2 j. a) Representa la trayectoria entre los instantes t=0 y t=4s
Cuadernillo de Física. (Actividades orientativas para el examen)
") Cuadernillo de Física (Actividades orientativas para el examen) A.1 El vector de posición de un punto móvil viene dado por: r = 2ti + t 2 /2 j. a) Representa la trayectoria entre los instantes t=0 y t=4s
Cuadernillo de Física (Actividades orientativas para el examen) A.1 El vector de posición de un punto móvil viene dado por: r = 2ti + t 2 /2 j. a) Representa la trayectoria entre los instantes t=0 y t=4s
EL MOVIMIENTO CIENCIAS: FÍSICA PLAN GENERAL SISTEMA DE REFERENCIA DESPLAZAMIENTO PREUNIVERSITARIO POPULAR FRAGMENTOS COMUNES
 EL MOVIMIENTO El movimiento siempre nos ha interesado. Por ejemplo, en el mundo de hoy consideramos el movimiento cuando describimos la rapidez de un auto nuevo o el poder de aceleración que tiene. La
EL MOVIMIENTO El movimiento siempre nos ha interesado. Por ejemplo, en el mundo de hoy consideramos el movimiento cuando describimos la rapidez de un auto nuevo o el poder de aceleración que tiene. La
TEMA 4: CINEMÁTICA DEL PUNTO MATERIAL
 TEMA 4: CINEMÁTICA DEL PUNTO MATERIAL 1. El movimiento Hay dos formas de enfocar el estudio del movimiento de los cuerpos: Cinemática: el estudio se realiza prescindiendo de las causas que originan el
TEMA 4: CINEMÁTICA DEL PUNTO MATERIAL 1. El movimiento Hay dos formas de enfocar el estudio del movimiento de los cuerpos: Cinemática: el estudio se realiza prescindiendo de las causas que originan el
Movimiento Rectilíneo Uniformemente Acelerado Caída Libre / Tiro Vertical Movimiento Circular Uniforme
 CINEMÁTICA Sistema de Referencia Magnitudes Cinemáticas Velocidad Aceleración Tipos de Movimiento Movimiento Rectilíneo Uniforme Movimiento Rectilíneo Uniformemente Acelerado Caída Libre / Tiro Vertical
CINEMÁTICA Sistema de Referencia Magnitudes Cinemáticas Velocidad Aceleración Tipos de Movimiento Movimiento Rectilíneo Uniforme Movimiento Rectilíneo Uniformemente Acelerado Caída Libre / Tiro Vertical
Cinemática: parte de la Física que estudia el movimiento de los cuerpos.
 CINEMÁTICA Cinemática: parte de la Física que estudia el movimiento de los cuerpos. Movimiento: cambio de posición de un cuerpo respecto de un punto de referencia que se supone fijo. Objetivo del estudio
CINEMÁTICA Cinemática: parte de la Física que estudia el movimiento de los cuerpos. Movimiento: cambio de posición de un cuerpo respecto de un punto de referencia que se supone fijo. Objetivo del estudio
I.E.S. Juan Gris Departamento de Física y Química Física y Química 1º Bachillerato
 Unidad 2: Cinemática Mecánica: Cinemática, Dinámica y Estática 2.1. Movimiento. Relatividad del movimiento. Sistema de referencia Tipos de movimiento: Traslación, rotación y su combinación. Cuerpo en traslación:
Unidad 2: Cinemática Mecánica: Cinemática, Dinámica y Estática 2.1. Movimiento. Relatividad del movimiento. Sistema de referencia Tipos de movimiento: Traslación, rotación y su combinación. Cuerpo en traslación:
Valor total: 2.5 puntos.
 Aeronaves y Vehículos Espaciales Duración: 50 minutos Ingenieros Aeronáuticos DNI Curso 08/09 Escuela Superior de Ingenieros 1 er Apellido 2 do Apellido 05/06/09 Universidad de Sevilla Nombre Problema
Aeronaves y Vehículos Espaciales Duración: 50 minutos Ingenieros Aeronáuticos DNI Curso 08/09 Escuela Superior de Ingenieros 1 er Apellido 2 do Apellido 05/06/09 Universidad de Sevilla Nombre Problema
Período: Segundo Término. Evaluación: Tercera Fecha: Febrero 18 del 2016 COMPROMISO DE HONOR
 ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL FACULTAD DE CIENCIAS NATURALES Y MATEMÁTICAS DEPARTAMENTO DE FÍSICA Año:2016 Período: Segundo Término Materia: Física Profesor: Msc. Coello Pisco Silvia Evaluación:
ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL FACULTAD DE CIENCIAS NATURALES Y MATEMÁTICAS DEPARTAMENTO DE FÍSICA Año:2016 Período: Segundo Término Materia: Física Profesor: Msc. Coello Pisco Silvia Evaluación:
de las x? origen? tramo
 1. Un avión se encuentra a tres Km al norte de un aeropuerto esperando el permiso para aterrizar. Mientras tanto se dirige en línea recta hacia el este, encontrándose a los 10 s a 5 Km del aeropuerto en
1. Un avión se encuentra a tres Km al norte de un aeropuerto esperando el permiso para aterrizar. Mientras tanto se dirige en línea recta hacia el este, encontrándose a los 10 s a 5 Km del aeropuerto en
TEMA 3 ACTUACIONES DE PUNTO
 TEMA 3 ACTUACIONES DE PUNTO En este curso se analizan las actuaciones de punto de aviones con turborreactor o turbofán. En el estudio de las actuaciones de punto static performance) se considera el problema
TEMA 3 ACTUACIONES DE PUNTO En este curso se analizan las actuaciones de punto de aviones con turborreactor o turbofán. En el estudio de las actuaciones de punto static performance) se considera el problema
UNIDAD: 1 MOVIMIENTOS RECTILÍNEOS Y CIRCULARES. INTRODUCCIÓN A LA CINEMÁTICA
 UNIDAD: 1 MOVIMIENTOS RECTILÍNEOS Y CIRCULARES. INTRODUCCIÓN A LA CINEMÁTICA ÍNDICE 1. La percepción del tiempo y el espacio 2. Descripción del movimiento 2.1. Instante e intervalo de tiempo 2.2. Posición
UNIDAD: 1 MOVIMIENTOS RECTILÍNEOS Y CIRCULARES. INTRODUCCIÓN A LA CINEMÁTICA ÍNDICE 1. La percepción del tiempo y el espacio 2. Descripción del movimiento 2.1. Instante e intervalo de tiempo 2.2. Posición
Movimiento curvilíneo. Magnitudes cinemáticas
 Movimiento curvilíneo. Magnitudes cinemáticas Movimiento curvilíneo Supongamos que el movimiento tiene lugar en el plano XY, Situamos un origen, y unos ejes, y representamos la trayectoria del móvil, es
Movimiento curvilíneo. Magnitudes cinemáticas Movimiento curvilíneo Supongamos que el movimiento tiene lugar en el plano XY, Situamos un origen, y unos ejes, y representamos la trayectoria del móvil, es
PROYECTO DOCENTE ASIGNATURA: "Aeronaves y Vehículos Espaciales" Grupo: Grupo 2(906346) Titulacion: INGENIERO AERONÁUTICO (Plan 2002) Curso:
 Titulacion: INGENIERO AERONÁUTICO (Plan 2002) Curso:") PROYECTO DOCENTE ASIGNATURA: "Aeronaves y Vehículos Espaciales" Grupo: Grupo 2(906346) Titulacion: INGENIERO AERONÁUTICO (Plan 2002) Curso: 2009-2010 DATOS BÁSICOS DE LA ASIGNATURA/GRUPO Titulación: Año
PROYECTO DOCENTE ASIGNATURA: "Aeronaves y Vehículos Espaciales" Grupo: Grupo 2(906346) Titulacion: INGENIERO AERONÁUTICO (Plan 2002) Curso: 2009-2010 DATOS BÁSICOS DE LA ASIGNATURA/GRUPO Titulación: Año
Solución Examen Cinemática 1º Bach Nombre y Apellidos: La expresión de la velocidad instantánea se obtiene derivando el vector de posición,
 Solución Examen Cinemática 1º Bach Nombre y Apellidos: 1. Dada la ecuación vectorial de la posición de una partícula halla en unidades S.I. a. la velocidad en función del tiempo, v ( t ) La expresión de
Solución Examen Cinemática 1º Bach Nombre y Apellidos: 1. Dada la ecuación vectorial de la posición de una partícula halla en unidades S.I. a. la velocidad en función del tiempo, v ( t ) La expresión de
Serie de ejercicios de Cinemática MOVIMIENTO CURVILÍNEO
 Serie de ejercicios de Cinemática MOVIMIENTO CURVILÍNEO 1. En cierto instante, el segmento de recta AB gira en el plano del papel alrededor de un eje que pasa por el punto O, con rapidez y aceleración
Serie de ejercicios de Cinemática MOVIMIENTO CURVILÍNEO 1. En cierto instante, el segmento de recta AB gira en el plano del papel alrededor de un eje que pasa por el punto O, con rapidez y aceleración
Introducción. Sergio Esteban Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos
 1 Calendario de la Asignatura Curso 2011/2012 Introducción Sergio Esteban sesteban@us.es Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos 2 Planificación de la Asignatura 11/12 Definir 5 áreas
1 Calendario de la Asignatura Curso 2011/2012 Introducción Sergio Esteban sesteban@us.es Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos 2 Planificación de la Asignatura 11/12 Definir 5 áreas
DISEÑO DE UN HR-UAV PARA AYUDA HUMANITARIA
 DISEÑO DE UN HR-UAV PARA AYUDA HUMANITARIA FLY AID Juan Carlos Cantero Moriano Cristina Fernández Ruiz David Lucena Pacheco Gabriela Marín Jiménez María del Carmen Martínez Moreno Grupo 4 Cálculo de Aviones
DISEÑO DE UN HR-UAV PARA AYUDA HUMANITARIA FLY AID Juan Carlos Cantero Moriano Cristina Fernández Ruiz David Lucena Pacheco Gabriela Marín Jiménez María del Carmen Martínez Moreno Grupo 4 Cálculo de Aviones
UNIVERSIDAD NACIONAL EXPERIMENTAL FRANCISCO DE MIRANDA AREA DE TECNOLOGÍA DEPARTAMEMTO DE FISICA Y MATEMÁTICA NUCLEO LOS PEROZO UNIDAD CURRICULAR:
 UNIVERSIDAD NACIONAL EXPERIMENTAL FRANCISCO DE MIRANDA AREA DE TECNOLOGÍA DEPARTAMEMTO DE FISICA Y MATEMÁTICA NUCLEO LOS PEROZO UNIDAD CURRICULAR: FISICA GENERAL Profa. Melissa Mora Santa Ana de Coro,
UNIVERSIDAD NACIONAL EXPERIMENTAL FRANCISCO DE MIRANDA AREA DE TECNOLOGÍA DEPARTAMEMTO DE FISICA Y MATEMÁTICA NUCLEO LOS PEROZO UNIDAD CURRICULAR: FISICA GENERAL Profa. Melissa Mora Santa Ana de Coro,