Transformación Bidimensional entre PSAD56 e ITRF08 usando métodos de Helmert y Molodensky
|
|
|
- Marta Carmona Hidalgo
- hace 6 años
- Vistas:
Transcripción





1 Transformación Bidimensional entre PSAD56 e ITRF08 usando métodos de Helmert y Molodensky María José Zambrano Carrera de Ingeniería Geográfica y Medio Ambiente Universidad de las Fuerzas Armadas ESPE Ricardo Romero Grupo de Investigación en Tecnologías Espaciales Gestión Investigación y Desarrollo Instituto Geográfico Militar Alfonso Tierra Grupo de Investigación en Tecnologías Espaciales Universidad de las Fuerzas Armadas ESPE
2 GENERALIDADES.

 de coordenadas.")
.")

3 INTRODUCCIÓN El proceso de conversión de un sistema de coordenadas a otro, llamado transformación de coordenadas, requiere que los mismos puntos tengan sus coordenadas conocidas en ambos sistemas, el arbitrario (local) y el sistema final (global) de coordenadas. Para este trabajo se utilizó la transformación bidimensional, para coordenadas planas (Este-Norte). Los métodos que se aplicaron para la transformación bidimensional fue la transformación de Helmert y Molodensky Badekas. Puntos homólogos PSAD56 - ITRF Transformación Coordenadas Métodos Helmert Molodensky Transformación bidimensional Compatibilizar y actualizar Finalidad


4 PROBLEMÁTICA A RESOLVER Cartografía incompatible Escala de representación Precisión de la red clásica

5 TRANSFORMACIÓN DE COORDENADAS M. Helmert M. Molodensky Transformación Similaridad Figura1. Transformación de Sistemas de Referencia
6 METODOLOGÍA.
7 TRANSFORMACIÓN DE HELMERT Conocidas las coordenadas de dos puntos en ambos sistemas podrán determinarse las cuatro incógnitas de la transformación de Helmert. Figura2. Dos sistemas de coordenadas en el plano Fuente: M Farjas, (2005)
8 TRANSFORMACIÓN DE HELMERT Este tipo de transformación considera los siguientes parámetros: rotación, traslación y diferencial de escala. El modelo matemático de Helmert para la transformación de coordenadas en PSAD56 a ITF08 vienen dadas por (1): X Y I = X o Y o δ R X Y P (1) Donde, X Y I T,corresponde a las coordenadas en ITRF08. X o Y o T, traslaciones en X y Y. K= 1 + δ, representa la factor de escala, donde δ es el diferencial de escala. R, corresponde a la matriz de rotaciones en el eje z. X Y P T,corresponde a las coordenadas en PSAD56.
9 TRANSFORMACIÓN DE MOLODENSKY Figura 3.Geometría de la Transformación de Molodensky-Badekas Fuente:School of Mathematical & Geospatial Sciences. RMIT University,(2006)
10 ( ) TRANSFORMACIÓN DE MOLODENSKY-BADEKAS El modelo bidimensional de Molodensky relaciona dos sistemas de coordenadas mediante los cuatro parámetros de transformación de Helmert, la diferencia radica en la inclusión de un centroide de coordenadas ( X m, Y m ). Las ecuaciones de condición para la transformación de coordenadas en PSAD56 a ITF08 vienen dadas por (2): X Y I = X o Y o + X m Ym δ R X X m Y Y m P (2) Donde, X Y T I,corresponde a las coordenadas en ITRF08. X o Y T o, traslaciones en X y Y. X m Y T m,coordenadas del centroide. K= 1 + δ, representa la factor de escala,donde δ es el diferencial de escala. R, corresponde a la matriz de rotaciones en el eje z. X X m (Y Y m ) T P,corresponde a las coordenadas en PSAD56.
11 MÉTODO DE MÍNIMOS DE CUADRADOS Las observaciones ajustadas se pueden expresar en función de los parámetros ajustados (5): Donde, La=Observaciones ajustadas Xa= Parámetros que van hacer ajustados La = F(X a ) El modelo matemático para calcular los parámetros de transformación está dado por (6) X = (A T * P * A) 1 * (A T P L) Donde, X= Vector de corrección d parámetros A=Matriz de derivadas parciales P= Matriz de pesos (Identidad) L= Diferencia entre las observaciones aproximadas y las observaciones realizadas Para determinar la calidad del ajuste, se calcula la varianza posteriori (7): σ o 2 = VT P V (n u) = Ф (n u) Donde, n-u =Grados de libertad, n es el número de observaciones y u, número de incógnitas V=vector de residuales de las observaciones ajustadas
12 ( ) PARÁMETROS DE TRANSFORMACIÓN ENTRE ITRF Si se asumen que un ITRF no varía con respecto al tiempo y sus coordenadas quedan ajustadas en el espacio (no hay velocidades involucradas), en este caso los parámetros de transformación se emplean sin sus velocidades, se usan 7 parámetros, pero si se asume que los parámetros de transformación cambian con respecto al tiempo en una época dada, entonces es necesario el uso de los 14 parámetros (incluidos sus rates). 14 parámetros 7 parámetros Figura 4.Parámetros de Transformación del ITRF2008 a ITRFS anteriores. Fuente: The International Terrestrial Reference Frame.
13 METODOLOGÍA Parámetros de Transformación IGb08 PSAD56 2 Traslaciones 1 Rotación 1 Diferencial de escala Comisiones 54 País 134 Coordenadas observadas en IGb08, ITRF08 (2013) Base de datos,observadas en ITRF94 (1995.4), de los 134 vértices : 80 se transformaron (ITRF94 ITRF08)
 y viceversa, tendiendo las coordenadas de las comisiones y del país en los dos sistemas. Tabla1.Coordenadas cartesianas de la de la Base de Datos. Figura 5.")
14 1. Se elaboró una base de datos de coordenadas tanto en PSAD56 como en ITRF Se realizó un cambio de época entre ITRFs del ITRF94 (1995.4) a ITRF08 (2013.9) y viceversa, tendiendo las coordenadas de las comisiones y del país en los dos sistemas. Tabla1.Coordenadas cartesianas de la de la Base de Datos. Figura 5.Parámetros de Transformación del ITRF2008 a ITRFS anteriores. Fuente: The International Terrestrial Reference Frame.
15 3. Las coordenadas en los dos sistemas fueron tranformadas utilizando 7 y 14 parámetros: Coordenadas Transformadas con rates Coordenadas Transformadas sin rates 14 parámetros 7 parámetros Figura 6.Parámetros de Transformación del ITRF2008 a ITRF94. Parámetros 7 14 X Y Z λ ϕ E N

16 ÁREAS DE COBERTURA Figura 7. Puntos observados en las Comisiones Figura 8.Puntos observados en todo el País.


17 4. Para la transformación de las coordenadas se diseñaron dos programas en el software de Matlab, para cada uno de los métodos. Figura9.Programa Molodensky- Badekas. Figura10.Programa Helmert.

18 5. Del conjunto de puntos de las comisiones y de todo el país, se seleccionó los puntos de ajuste y los puntos de comprobación para cada grupo. PUNTOS Puntos Comisiones: 54 País: 134 Ajuste Comprobación Comprobación 30% 70 % Ajuste Los puntos de ajuste comprenden los puntos extremos que cubren el contorno del país y aquellos de mayor y menor altura nivelada. Con los puntos destinados para la prueba o comprobación, se calculó las estadísticas principals. La escala se obtiene de la ecuación: Escala de aplicación = Error máximo /0.3 mm


19 Figura11.Programa Helmert Tabla2. Parámetros de transformación para Helmert, vértices del grupo de Comisiones. Parámetros del programa δ ppm α 1.37E-6 rad Tx m Ty m ESTACIÓN UTM Observadas ITRF08 Transformadas N E N E Diferencia N Diferencia E Distancia El Pelado Cabras Cungapito Rayoloma Tuquer Alto Germania Torre Cuna Palestina Saya Chillacocha Pachito Quinde Yantahuayco CASITAGUA LATACUNGA BN LULUNURCO MINAYA MIRAVALLE Media PANECILLO GEOD Mínimo PAYAMINO Máximo UNGUI II LOJA UTPL Desviación CULAURCO Escala CACHARI MASHASHINGO CORAZON DANAS CORONA REAL GUANGOTASIN INGACORRAL
20 RESULTADOS.
21 Parámetros de transformación por el método bidimensional de Helmert y Molodensky entre PSAD56 e ITRF08 transformado con 7 parámetros. TABLA 3. PARÁMETROS DE TRANSFORMACIÓN HELMERT TABLA 4. PARÁMETROS DE TRANSFORMACIÓN MOLODENSKY Método Helmert Parámetros Comisiones País Diferencial escala ppm 0.42 ppm Rotación 1.37E-6 rad 2.75E-6 rad Traslación Este m m Traslación Norte m m Método Molodensky Parámetros Comisiones País Diferencial escala ppm 0.42 ppm Rotación 1.37E-6 rad 2.75E-6 rad Traslación Este m m Traslación Norte m m
22 Parámetros de transformación por el método bidimensional de Helmert y Molodensky entre PSAD56 e ITRF08 transformado con 14 parámetros. TABLA 5. PARÁMETROS DE TRANSFORMACIÓN HELMERT Y MOLODENSKY Transformación 14 Parámetros Parámetros Método Helmert Método de Molodensky Diferencial escala ppm ppm Rotación 2.75E-6 rad 2.75E-6 rad Traslación Este m m Traslación Norte m m
23 ESTADÍSTICAS PRINCIPALES TABLA 7. ESTADÍSTICAS PRINCIPALES DE LA TRANSFORMACIÓN ENTRE PSAD56- ITRF08 APLICANDO LOS RESULTADOS DE LA TABLA 3 Y 4. Valores Método Helmert Método Molodensky Comisiones País Comisiones País Media Máximo Mínimo Desviación Escala TABLA 8. ESTADÍSTICAS PRINCIPALES DE LA TRANSFORMACIÓN ENTRE PSAD56- ITRF08 APLICANDO LOS RESULTADOS DE LA TABLA 5 Y 6. Método Método Helmert Valores Molodensky País País Media Máximo Mínimo Desviación Escala
24 APLICACIONES EN SIG s.

")
25 SIG 2. SYSTEM OF AUTOMATED GEOSCIENTIFIC ANALYSES (SAGA) Helmert : 7 parámetros
26


27 SIG 2. GVSIG Helmert: 7 parámetros


28 SIG 3. KOSMO Helmert: 7 parámetros
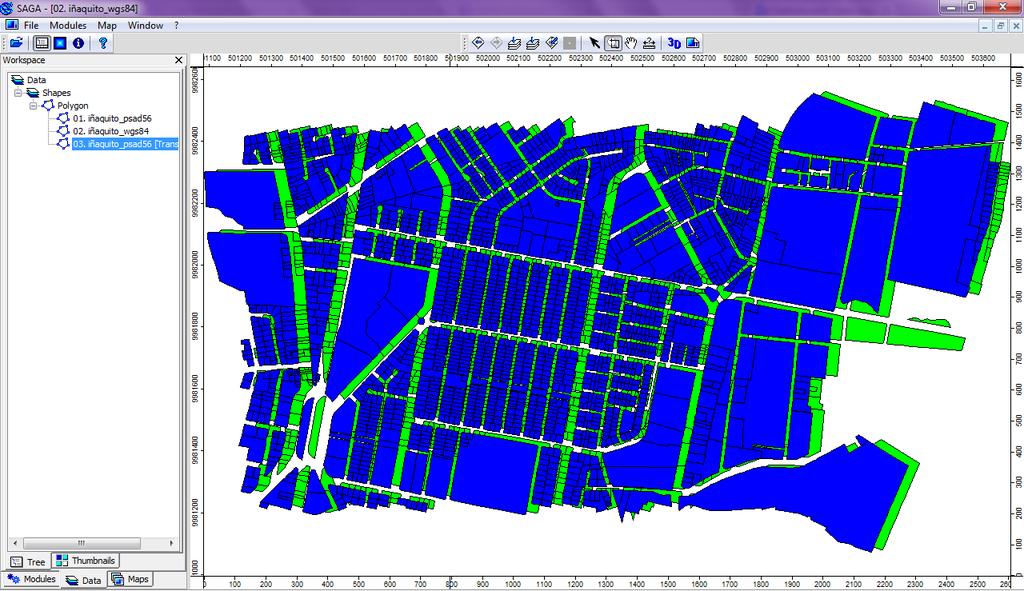
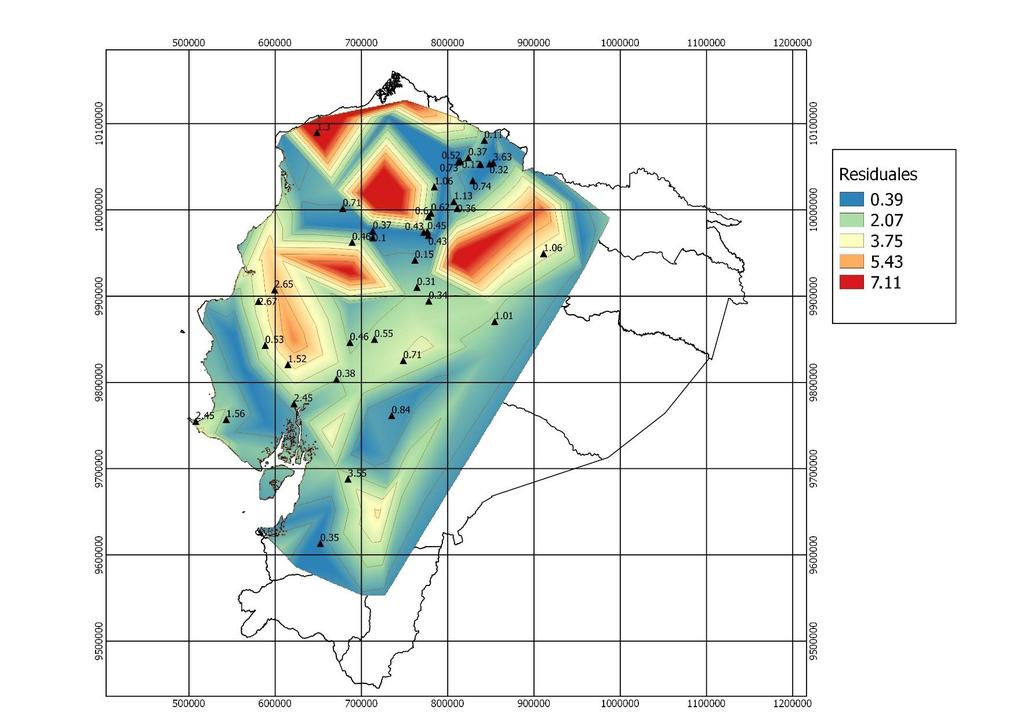
29 RESIDUALES.
30
31
32 CONCLUSIONES Se realizó la metodología para transformar los sistemas PSAD56 e ITRF08usando métodos de Helmert y Molodensky con coordenadas planas UTM. La transformación PSAD56-ITRF08 observadas en las comisiones son compatibles con escalas menores a 1:20000, debido a la mala distribución de los puntos. La transformación de PSAD56-ITRF08 (observadas y transformadas) son compatibles con escalas menores a1:30000, según el método de Helmert y a escalas 1:15000 según el método de Molodensky Badekas. La aplicación de los parámetros de transformación de Molodensky Badekas, también son compatibles con escalas medianas, específicamente para cartografía temática a detalle. La aplicación de estos parámetros de transformación servirá para la transformación espacial de la cartografía, en sistemas de información geográfica que requieren explícitamente transformaciones bidimensionales.

33
SISTEMAS DE REFERENCIA Y PARÁMETROS DE TRANSFORMACION Prof. Ricardo Martínez Morales
 CARTOGRAFÍA MATEMÁTICA 1 Introducción SISTEMAS DE REFERENCIA PARÁMETROS DE TRANSFORMACION Prof. Ricardo Martínez Morales Para establecer la relación entre los levantamientos geodésicos basados en la utilización
CARTOGRAFÍA MATEMÁTICA 1 Introducción SISTEMAS DE REFERENCIA PARÁMETROS DE TRANSFORMACION Prof. Ricardo Martínez Morales Para establecer la relación entre los levantamientos geodésicos basados en la utilización
Posibilidad de obtener coordenadas en los marcos de referencia nacionales mediante procesamiento PPP en línea en Venezuela y Bolivia.
 Posibilidad de obtener coordenadas en los marcos de referencia nacionales mediante procesamiento PPP en línea en Venezuela y Bolivia. M. Hoyer ¹ ; G. Rincón ¹ ; A. Echalar ² ; M. Sandoval ² ; F. Balcázar
Posibilidad de obtener coordenadas en los marcos de referencia nacionales mediante procesamiento PPP en línea en Venezuela y Bolivia. M. Hoyer ¹ ; G. Rincón ¹ ; A. Echalar ² ; M. Sandoval ² ; F. Balcázar
Conceptos básicos de cartografía. M. en B. Alma Delia Toledo Guzmán
 Conceptos básicos de cartografía Qué es cartografía? Asociación Cartográfica Internacional (ACI), 1995 Concepción Disciplina Estudio Mapas Producción Difusión Qué es cartografía? Asociación Cartográfica
Conceptos básicos de cartografía Qué es cartografía? Asociación Cartográfica Internacional (ACI), 1995 Concepción Disciplina Estudio Mapas Producción Difusión Qué es cartografía? Asociación Cartográfica
PROCEDIMIENTO PARA LA MIGRACIÓN A MAGNA-SIRGAS DE LA CARTOGRAFÍA EXISTENTE REFERIDA AL DATUM BOGOTÁ, UTILIZANDO EL SOFTWARE ARCGIS DE ESRI
 PROCEDIMIENTO PARA LA MIGRACIÓN A MAGNA-SIRGAS DE LA CARTOGRAFÍA EXISTENTE REFERIDA AL DATUM BOGOTÁ, UTILIZANDO EL SOFTWARE ARCGIS DE ESRI Objetivo Proporcionar los datos requeridos por ArcGIS para la
PROCEDIMIENTO PARA LA MIGRACIÓN A MAGNA-SIRGAS DE LA CARTOGRAFÍA EXISTENTE REFERIDA AL DATUM BOGOTÁ, UTILIZANDO EL SOFTWARE ARCGIS DE ESRI Objetivo Proporcionar los datos requeridos por ArcGIS para la
ACTIVIDADES DESARROLLADAS POR LA REPÚBLICA DEL ECUADOR DENTRO DEL PROYECTO SIRGAS
 ACTIVIDADES DESARROLLADAS POR LA REPÚBLICA DEL ECUADOR DENTRO DEL PROYECTO SIRGAS Ing. C és ar A. Leiva G. cleiva@ mail.igm.gov.ec R eunión S IR G AS 2008 M ontevideo, 28 de mayo de 2008. Introducción
ACTIVIDADES DESARROLLADAS POR LA REPÚBLICA DEL ECUADOR DENTRO DEL PROYECTO SIRGAS Ing. C és ar A. Leiva G. cleiva@ mail.igm.gov.ec R eunión S IR G AS 2008 M ontevideo, 28 de mayo de 2008. Introducción
Instituto Geográfico Nacional
 Instituto Geográfico Nacional NTIG_CR01_01.2016: Sistema de Referencia de Costa Rica 10 de octubre de 2016 NTIG_CR01_01.2016: Sistema de Referencia de Costa Rica Definiciones Sistema de referencia: es
Instituto Geográfico Nacional NTIG_CR01_01.2016: Sistema de Referencia de Costa Rica 10 de octubre de 2016 NTIG_CR01_01.2016: Sistema de Referencia de Costa Rica Definiciones Sistema de referencia: es
INFRAESTRUCTURA DE DATOS ESPACIALES DEL URUGUAY. ESPECIFICACIONES TÉCNICAS Sistemas de Referencias Sistemas de Proyecciones
 INFRAESTRUCTURA DE DATOS ESPACIALES DEL URUGUAY ESPECIFICACIONES TÉCNICAS Sistemas de Referencias Sistemas de Proyecciones 1- Justificación A los efectos de mejorar la interoperabilidad de los datos, y
INFRAESTRUCTURA DE DATOS ESPACIALES DEL URUGUAY ESPECIFICACIONES TÉCNICAS Sistemas de Referencias Sistemas de Proyecciones 1- Justificación A los efectos de mejorar la interoperabilidad de los datos, y
GEODESIA. I semestre, Ing. José Francisco Valverde Calderón Sitio web:
 1 GEODESIA I semestre, 2015 Ing. José Francisco Valverde Calderón Email: jose.valverde.calderon@una.cr Sitio web: www.jfvc.wordpress.com 2 6. LA PROBLEMÁTICA DEL DATUM Contenido 6.1 Datum Convencional
1 GEODESIA I semestre, 2015 Ing. José Francisco Valverde Calderón Email: jose.valverde.calderon@una.cr Sitio web: www.jfvc.wordpress.com 2 6. LA PROBLEMÁTICA DEL DATUM Contenido 6.1 Datum Convencional
GPS. Análisis de la Influencia de los métodos de cálculo en la precisión. Universidad de Córdoba. España. 2001
 6. Ajuste de Redes 6.1 Introducción En el concepto clásico, ajustar una red significa compensar un conjunto de observaciones abundantes (ángulos, distancias y/o coordenadas) con el fin de obtener un estimador
6. Ajuste de Redes 6.1 Introducción En el concepto clásico, ajustar una red significa compensar un conjunto de observaciones abundantes (ángulos, distancias y/o coordenadas) con el fin de obtener un estimador
MANUAL DE REFERENCIA Baco 3.0. Módulo de batimetrías y Cartas náuticas de la costa. Universidad de Cantabria UC
 Módulo de batimetrías y Cartas náuticas de la costa MANUAL DE REFERENCIA Baco 3.0 Ministerio de Medio Ambiente Dirección General de Costas Universidad de Cantabria UC G.I.O.C. Grupo de Ingeniería Oceanográfica
Módulo de batimetrías y Cartas náuticas de la costa MANUAL DE REFERENCIA Baco 3.0 Ministerio de Medio Ambiente Dirección General de Costas Universidad de Cantabria UC G.I.O.C. Grupo de Ingeniería Oceanográfica
Transformación bidimensional afín (transformación de 6 parámetros)
") www.topoedu.es Los mejores recursos especializados en topografía y geodesia, nunca vistos hasta ahora. Hojas técnicas de cálculo: Transformación bidimensional afín (transformación de 6 parámetros) Usando
www.topoedu.es Los mejores recursos especializados en topografía y geodesia, nunca vistos hasta ahora. Hojas técnicas de cálculo: Transformación bidimensional afín (transformación de 6 parámetros) Usando
Sistemas de referencia convencionales
 Sistemas de referencia convencionales Sistemas de referencia geodésicos locales ROU-USAMS CDM Campo Ichauspe Sistemas de referencia geocéntricos WGS 84 ITRS Sistemas de referencia local Un sistema de referencia
Sistemas de referencia convencionales Sistemas de referencia geodésicos locales ROU-USAMS CDM Campo Ichauspe Sistemas de referencia geocéntricos WGS 84 ITRS Sistemas de referencia local Un sistema de referencia
Eigenvalores y eigenvectores
 Eigenvalores y eigenvectores Los dos problemas principales del álgebra lineal son: resolver sistemas lineales de la forma Ax = b y resolver el problema de eigenvalores. En general, una matriz actúa sobre
Eigenvalores y eigenvectores Los dos problemas principales del álgebra lineal son: resolver sistemas lineales de la forma Ax = b y resolver el problema de eigenvalores. En general, una matriz actúa sobre
Graficación CCOM-259. Benemérita Universidad Autónoma de Puebla. Facultad de Ciencias de la Computación. Daniel Alejandro Valdés Amaro, Ph.
 Graficación CCOM-9 Benemérita Universidad Autónoma de Puebla Facultad de Ciencias de la Computación Daniel Alejandro Valdés Amaro, Ph.D Objetivo: El alumno conocerá y aplicará los algoritmos y técnicas
Graficación CCOM-9 Benemérita Universidad Autónoma de Puebla Facultad de Ciencias de la Computación Daniel Alejandro Valdés Amaro, Ph.D Objetivo: El alumno conocerá y aplicará los algoritmos y técnicas
Manual de Topografía Práctica
 1 Índice 1 ÍNDICE 5 Manual de Topografía Práctica 6 1 Índice 1 ÍNDICE... 5 2 PRÓLOGO... 17 3 INTRODUCCIÓN... 21 3.1 Geomática y topografía... 23 3.2 Ramas de la geomática... 23 3.3 Operaciones topográficas
1 Índice 1 ÍNDICE 5 Manual de Topografía Práctica 6 1 Índice 1 ÍNDICE... 5 2 PRÓLOGO... 17 3 INTRODUCCIÓN... 21 3.1 Geomática y topografía... 23 3.2 Ramas de la geomática... 23 3.3 Operaciones topográficas
UNIVERSIDAD TECNOLÓGICA DE PANAMÁ SECRETARÍA GENERAL FACULTAD DE INGENIERÍA CIVIL
 UNIVERSIDAD TECNOLÓGICA DE PANAMÁ SECRETARÍA GENERAL FACULTAD DE INGENIERÍA CIVIL DESCRIPCIÓN DE CURSO DE MAESTRÍA Y POSTGRADO EN SISTEMAS DE INFORMACIÓN GEOGRÁFICA 2013 APROBADO POR EL CONSEJO DE INVESTIGACIÓN,
UNIVERSIDAD TECNOLÓGICA DE PANAMÁ SECRETARÍA GENERAL FACULTAD DE INGENIERÍA CIVIL DESCRIPCIÓN DE CURSO DE MAESTRÍA Y POSTGRADO EN SISTEMAS DE INFORMACIÓN GEOGRÁFICA 2013 APROBADO POR EL CONSEJO DE INVESTIGACIÓN,
Pruebas extraordinarias de septiembre Bachillerato
 Pruebas extraordinarias de septiembre Bachillerato El Departamento de Matemáticas establece como prueba extraordinaria un único examen, en el que se incluirán los contenidos mínimos establecidos para cada
Pruebas extraordinarias de septiembre Bachillerato El Departamento de Matemáticas establece como prueba extraordinaria un único examen, en el que se incluirán los contenidos mínimos establecidos para cada
2 Transformaciones en 3D
 2 Transformaciones en 3D La manera más fácil de conseguir las transformaciones básicas (traslación, rotación, escalación, en general las transformaciones afines) es utilizando matrices de transformación.
2 Transformaciones en 3D La manera más fácil de conseguir las transformaciones básicas (traslación, rotación, escalación, en general las transformaciones afines) es utilizando matrices de transformación.
Problemas básicos y complementarios de la geodesia
 Problemas básicos y complementarios de la geodesia (Resumen de fórmulas y ejemplos numéricos) Rubén C. Rodríguez rubenro@fibertel.com.ar 2012 Los problemas básicos de la geodesia son dos: - directo, dadas
Problemas básicos y complementarios de la geodesia (Resumen de fórmulas y ejemplos numéricos) Rubén C. Rodríguez rubenro@fibertel.com.ar 2012 Los problemas básicos de la geodesia son dos: - directo, dadas
MANEJO Y APLICACIÓN DEL MATLAB EN LA ENSEÑANZA DE LAS MATEMATICAS, CIENCIAS NATURALES Y CURSOS TECNICOS
 MANEJO Y APLICACIÓN DEL MATLAB EN LA ENSEÑANZA DE LAS MATEMATICAS, CIENCIAS NATURALES Y CURSOS TECNICOS Profesor : JAIRO PERTUZ CAMPO Físico, Instructor y Asesor de MATLAB E-mail : jpertuz@udem.edu.co
MANEJO Y APLICACIÓN DEL MATLAB EN LA ENSEÑANZA DE LAS MATEMATICAS, CIENCIAS NATURALES Y CURSOS TECNICOS Profesor : JAIRO PERTUZ CAMPO Físico, Instructor y Asesor de MATLAB E-mail : jpertuz@udem.edu.co
Tema 2: Movimiento unidimensional
 Tema 2: Movimiento unidimensional FISICA I, 1º Grado en Ingeniería Electrónica, Robótica y Mecatrónica Escuela Técnica Superior de Ingeniería Universidad de Sevilla 1 Índice Introducción Vector de posición
Tema 2: Movimiento unidimensional FISICA I, 1º Grado en Ingeniería Electrónica, Robótica y Mecatrónica Escuela Técnica Superior de Ingeniería Universidad de Sevilla 1 Índice Introducción Vector de posición
Por qué tenemos que cambiar? Real Decreto 1071/2007, de 27 de Julio, por el que se regula el sistema geodésico de referencia oficial en España
 Migración a ETRS89 Jorge Luis Iribas Cardona Jefe de la Sección de Cartografía Por qué tenemos que cambiar? Real Decreto 1071/2007, de 27 de Julio, por el que se regula el sistema geodésico de referencia
Migración a ETRS89 Jorge Luis Iribas Cardona Jefe de la Sección de Cartografía Por qué tenemos que cambiar? Real Decreto 1071/2007, de 27 de Julio, por el que se regula el sistema geodésico de referencia
EL CAMBIO DEL MARCO DE REFERENCIA OFICIAL EN MÉXICO
 EL CAMBIO DEL MARCO DE REFERENCIA OFICIAL EN MÉXICO Contenido Antecedentes Cálculo de Coordenadas de la RGNA Transformación ITRF 92 a ITRF 2000 Modelo del IERS Placas Tectónicas Antecedentes La Red Geodésica
EL CAMBIO DEL MARCO DE REFERENCIA OFICIAL EN MÉXICO Contenido Antecedentes Cálculo de Coordenadas de la RGNA Transformación ITRF 92 a ITRF 2000 Modelo del IERS Placas Tectónicas Antecedentes La Red Geodésica
Fundamentos de Robótica
 Fundamentos de Robótica Herramientas Matemáticas para la Localización Espacial Matrices de Transformación Homogéneas Ricardo-Franco Mendoza-Garcia rmendozag@uta.cl Escuela Universitaria de Ingeniería Mecánica
Fundamentos de Robótica Herramientas Matemáticas para la Localización Espacial Matrices de Transformación Homogéneas Ricardo-Franco Mendoza-Garcia rmendozag@uta.cl Escuela Universitaria de Ingeniería Mecánica
Rango de una matriz. Antes de nada daremos algunas definiciones. Para ello supongamos que tenemos una matriz de orden m n: A M m n.
 En un artículo anterior dijimos que el rango de una matriz A, ra), es el número de filas que son linealmente independientes. También se hizo uso del método de Gauss para calcular el rango de una matriz:
En un artículo anterior dijimos que el rango de una matriz A, ra), es el número de filas que son linealmente independientes. También se hizo uso del método de Gauss para calcular el rango de una matriz:
3º E.S.O. II.- ÁLGEBRA
 3º E.S.O. Se consideran mínimos exigibles para el tercer curso de E.S.O. todos los del segundo curso y los siguientes: I.- NÚMEROS Números racionales - Definir (no de forma rigurosa ) y distinguir los
3º E.S.O. Se consideran mínimos exigibles para el tercer curso de E.S.O. todos los del segundo curso y los siguientes: I.- NÚMEROS Números racionales - Definir (no de forma rigurosa ) y distinguir los
Mapa de los observatorios DORIS
 Mapa de los observatorios DORIS GPS / GNSS (Global Navigation Satellite System) Determinación de la posición de un punto observando al menos 4 satélites en forma simultánea. Satélite GPS Antena GPS GPS
Mapa de los observatorios DORIS GPS / GNSS (Global Navigation Satellite System) Determinación de la posición de un punto observando al menos 4 satélites en forma simultánea. Satélite GPS Antena GPS GPS
MANUAL PARA EL USUSARIO CALCULADORA GEOGRÁFICA PARA BOLIVIA MARCO DE REFERENCIA GEODÉSICO NACIONAL
 MANUAL PARA EL USUSARIO CALCULADORA GEOGRÁFICA PARA BOLIVIA MARCO DE REFERENCIA GEODÉSICO NACIONAL Cap. Ing. Victor Eduardo Piza Flores Ingeniería Geográfica de la Escuela militar de Ingeniería 1. Introducción
MANUAL PARA EL USUSARIO CALCULADORA GEOGRÁFICA PARA BOLIVIA MARCO DE REFERENCIA GEODÉSICO NACIONAL Cap. Ing. Victor Eduardo Piza Flores Ingeniería Geográfica de la Escuela militar de Ingeniería 1. Introducción
III: OBTENCIÓN DE ALTURAS SOBRE EL NIVEL MEDIO DEL MAR A PARTIR DE INFORMACIÓN GPS
 Anexo III: OBTENCIÓN DE ALTURAS SOBRE EL NIVEL MEDIO DEL MAR A PARTIR DE INFORMACIÓN GPS El sistema de posicionamiento global GPS puede ser empleado en la extensión del control vertical sobre aquellas
Anexo III: OBTENCIÓN DE ALTURAS SOBRE EL NIVEL MEDIO DEL MAR A PARTIR DE INFORMACIÓN GPS El sistema de posicionamiento global GPS puede ser empleado en la extensión del control vertical sobre aquellas
3. ÁLGEBRA LINEAL // 3.1. SISTEMAS DE
 3. ÁLGEBRA LINEAL // 3.1. SISTEMAS DE ECUACIONES LINEALES Y MATRICES COMPLEMENTOS PARA LA FORMACIÓN DISCIPLINAR EN MATEMÁTICAS Curso 2011-2012 3.1.1. Resolución de sistemas de ecuaciones lineales. Método
3. ÁLGEBRA LINEAL // 3.1. SISTEMAS DE ECUACIONES LINEALES Y MATRICES COMPLEMENTOS PARA LA FORMACIÓN DISCIPLINAR EN MATEMÁTICAS Curso 2011-2012 3.1.1. Resolución de sistemas de ecuaciones lineales. Método
Cinemática del Robot
 Cinemática del Robot La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. En primer término, la cinemática se interesa por la descripción analítica del movimiento
Cinemática del Robot La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. En primer término, la cinemática se interesa por la descripción analítica del movimiento
2 OBJETIVOS TERMINALES Como resultado de aprender adecuadamente los contenidos del curso el estudiante estará en capacidad de:
 MATERIA: Matemáticas para el diseño CÓDIGO: 08287 REQUISITOS: Algebra y funciones (08272) PROGRAMAS: Diseño Industrial, Diseño de Medios Interactivos. PERÍODO ACADÉMICO: 2016-2 INTENSIDAD SEMANAL: 4 Horas
MATERIA: Matemáticas para el diseño CÓDIGO: 08287 REQUISITOS: Algebra y funciones (08272) PROGRAMAS: Diseño Industrial, Diseño de Medios Interactivos. PERÍODO ACADÉMICO: 2016-2 INTENSIDAD SEMANAL: 4 Horas
SISTEMA DE POSICIONAMIENTO SATELITAL
 SISTEMA DE POSICIONAMIENTO SATELITAL APUNTES DE LA CÁTEDRA Universidad Juan Agustín Maza Facultad de Ingeniería Carrera: Ingeniería en Agrimensura Dra. María Virginia Mackern 2005 Profesora M. Virginia
SISTEMA DE POSICIONAMIENTO SATELITAL APUNTES DE LA CÁTEDRA Universidad Juan Agustín Maza Facultad de Ingeniería Carrera: Ingeniería en Agrimensura Dra. María Virginia Mackern 2005 Profesora M. Virginia
Sistemas de ecuaciones lineales dependientes de un parámetro
 Vamos a hacer uso del Teorema de Rouché-Frobenius para resolver sistemas de ecuaciones lineales de primer grado. En particular, dedicaremos este artículo a resolver sistemas de ecuaciones lineales que
Vamos a hacer uso del Teorema de Rouché-Frobenius para resolver sistemas de ecuaciones lineales de primer grado. En particular, dedicaremos este artículo a resolver sistemas de ecuaciones lineales que
UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBA DE ACCESO A LAS ENSEÑANZAS UNIVERSITARIAS OFICIALES DE GRADO MATERIA: MATEMÁTICAS II
 UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBA DE ACCESO A LAS ENSEÑANZAS UNIVERSITARIAS OFICIALES DE GRADO MATERIA: MATEMÁTICAS II INSTRUCCIONES GENERALES Y VALORACIÓN El alumno contestará a
UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBA DE ACCESO A LAS ENSEÑANZAS UNIVERSITARIAS OFICIALES DE GRADO MATERIA: MATEMÁTICAS II INSTRUCCIONES GENERALES Y VALORACIÓN El alumno contestará a
Visión artificial y Robótica Geometría. Depto. de Ciencia de la Computación e Inteligencia Artificial
 Visión artificial y Robótica Geometría Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Geometría 2D y 3D Transformación de coordenadas Calibración de la cámara Álgebra necesaria
Visión artificial y Robótica Geometría Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Geometría 2D y 3D Transformación de coordenadas Calibración de la cámara Álgebra necesaria
Tema 6. Variables aleatorias continuas
 Tema 6. Variables aleatorias continuas Resumen del tema 6.1. Definición de variable aleatoria continua Identificación de una variable aleatoria continua X: es preciso conocer su función de densidad, f(x),
Tema 6. Variables aleatorias continuas Resumen del tema 6.1. Definición de variable aleatoria continua Identificación de una variable aleatoria continua X: es preciso conocer su función de densidad, f(x),
Topogra1a y Geodesia G337
 Topogra1a y Geodesia G337 Bloque I. Tema 1. Topogra1a y Geodesia Javier Sánchez Espeso Raúl Pereda García DPTO. DE INGENIERÍA GEOGRÁFICA Y TÉCNICAS DE EXPRESIÓN GRÁFICA Este tema se publica bajo Licencia:
Topogra1a y Geodesia G337 Bloque I. Tema 1. Topogra1a y Geodesia Javier Sánchez Espeso Raúl Pereda García DPTO. DE INGENIERÍA GEOGRÁFICA Y TÉCNICAS DE EXPRESIÓN GRÁFICA Este tema se publica bajo Licencia:
Solución de la ecuación de Stokes
 REVISTA Solución de la ecuación de Stokes Doctora en Ciencias Matemáticas, Resumen Palabras clave Método de los elementos Elementos cuadriláteros Solution of the Stokes equation using the quadrilateral
REVISTA Solución de la ecuación de Stokes Doctora en Ciencias Matemáticas, Resumen Palabras clave Método de los elementos Elementos cuadriláteros Solution of the Stokes equation using the quadrilateral
VALIDACIÓN DEL FUNCIONAL ONDULACIÓN GEOIDAL MEDIANTE MODELOS GLOBALES DEL GEOPOTENCIAL Y OBSERVACIONES TERRESTRES EN EL ECUADOR
 Universidad Nacional Pedro Henríquez Ureña (UNPHU), Km 7 1/2, Av. John F. Kennedy, Santo Domingo 1423, República Dominicana VALIDACIÓN DEL FUNCIONAL ONDULACIÓN GEOIDAL MEDIANTE MODELOS GLOBALES DEL GEOPOTENCIAL
Universidad Nacional Pedro Henríquez Ureña (UNPHU), Km 7 1/2, Av. John F. Kennedy, Santo Domingo 1423, República Dominicana VALIDACIÓN DEL FUNCIONAL ONDULACIÓN GEOIDAL MEDIANTE MODELOS GLOBALES DEL GEOPOTENCIAL
2015, Año del Generalísimo José María Morelos y Pavón
 Nombre de la Asignatura: ROBOTICA Línea de Investigación o Trabajo: PROCESAMIENTO DE SEÑALES ELECTRICAS Y ELECTRONICAS Tiempo de dedicación del estudiante a las actividades de: DOC-TIS-TPS-CRÉDITOS 48
Nombre de la Asignatura: ROBOTICA Línea de Investigación o Trabajo: PROCESAMIENTO DE SEÑALES ELECTRICAS Y ELECTRONICAS Tiempo de dedicación del estudiante a las actividades de: DOC-TIS-TPS-CRÉDITOS 48
2 = 1 0,5 + = 0,5 c) 3 + = = 2
 3 + = = 2") Trabajo Práctico N : SISTEMAS DE ECUACIONES LINEALES Ejercicio : Resuelva los siguientes sistemas de ecuaciones lineales empleando cuando sea posible: i) Método matricial. ii) Regla de Cramer. Interprete
Trabajo Práctico N : SISTEMAS DE ECUACIONES LINEALES Ejercicio : Resuelva los siguientes sistemas de ecuaciones lineales empleando cuando sea posible: i) Método matricial. ii) Regla de Cramer. Interprete
PAU Madrid. Matemáticas II. Año Examen de septiembre. Opción A. Ejercicio 1. Valor: 2 puntos.
 Opción A. Ejercicio. Valor: 2 puntos. Se considera la función real de variable real definida por: f(x) = a) ( punto) Determinar sus máximos y mínimos relativos x x 2 + b) ( punto) Calcular el valor de
Opción A. Ejercicio. Valor: 2 puntos. Se considera la función real de variable real definida por: f(x) = a) ( punto) Determinar sus máximos y mínimos relativos x x 2 + b) ( punto) Calcular el valor de
Guadalajara, Jalisco 18, y 19 y 20 de abril
 Guadalajara, Jalisco 18, y 19 y 20 de abril Taller: Transformación ITRF Eje Rector: Fortalecimiento Institucional Lic. Guido Alejandro González Franco INEGI Guadalajara, Jalisco, 19 de abril de 2007 Contenido
Guadalajara, Jalisco 18, y 19 y 20 de abril Taller: Transformación ITRF Eje Rector: Fortalecimiento Institucional Lic. Guido Alejandro González Franco INEGI Guadalajara, Jalisco, 19 de abril de 2007 Contenido
Cuáles son las imágenes de los puntos M,N,O,P respecto eje x?
 Guía N 3 Nombre: Curso: 1 Medio A-B-C-D Unidad Geometría Fecha: Profesora: Odette Castro M. Contenidos: Transformaciones isométricas en el plano cartesiano Simetría Axial 1. Dibuja la figura simétrica,
Guía N 3 Nombre: Curso: 1 Medio A-B-C-D Unidad Geometría Fecha: Profesora: Odette Castro M. Contenidos: Transformaciones isométricas en el plano cartesiano Simetría Axial 1. Dibuja la figura simétrica,
FACULTAD DE INGENIERÍA Y ARQUITECTURA ESCUELA PROFESIONAL DE INGENIERIA MECANICA SÍLABO DE CÁLCULO VECTORIAL
 FACULTAD DE INGENIERÍA Y ARQUITECTURA ESCUELA PROFESIONAL DE INGENIERIA MECANICA SÍLABO DE CÁLCULO VECTORIAL I. DATOS GENERALES 1.0. Unidad Académica : Ingeniería Mecánica 1.1. Semestre Académico : 2017
FACULTAD DE INGENIERÍA Y ARQUITECTURA ESCUELA PROFESIONAL DE INGENIERIA MECANICA SÍLABO DE CÁLCULO VECTORIAL I. DATOS GENERALES 1.0. Unidad Académica : Ingeniería Mecánica 1.1. Semestre Académico : 2017
CARTOGRAFÍA Unidad 4: Sistemas de referencia Magna - Sirgas
 Introducción En este módulo el estudiante conocerá los principios de la Geodesia, bases para la definición del actual sistema de referencia utilizado en la elaboración de la cartografía en la UAECD y en
Introducción En este módulo el estudiante conocerá los principios de la Geodesia, bases para la definición del actual sistema de referencia utilizado en la elaboración de la cartografía en la UAECD y en
Matemáticas Empresariales II. Sistemas de Ecuaciones lineales
 Matemáticas Empresariales II Lección 4 Sistemas de Ecuaciones lineales Manuel León Navarro Colegio Universitario Cardenal Cisneros M. León Matemáticas Empresariales II 1 / 34 Sistema de ecuaciones lineales
Matemáticas Empresariales II Lección 4 Sistemas de Ecuaciones lineales Manuel León Navarro Colegio Universitario Cardenal Cisneros M. León Matemáticas Empresariales II 1 / 34 Sistema de ecuaciones lineales
FACULTAD DE INGENIERÍA Y ARQUITECTURA ESCUELA PROFESIONAL DE INGENIERIA INDUSTRIAL
 FACULTAD DE INGENIERÍA Y ARQUITECTURA ESCUELA PROFESIONAL DE INGENIERIA INDUSTRIAL I. DATOS GENERALES SILABO CÁLCULO VECTORIAL 1.0. Unidad Académica : Ingeniería Industrial 1.1. Semestre Académico : 2018
FACULTAD DE INGENIERÍA Y ARQUITECTURA ESCUELA PROFESIONAL DE INGENIERIA INDUSTRIAL I. DATOS GENERALES SILABO CÁLCULO VECTORIAL 1.0. Unidad Académica : Ingeniería Industrial 1.1. Semestre Académico : 2018
FACULTAD DE INGENIERÍA Y ARQUITECTURA ESCUELA PROFESIONAL DE INGENIERÍA CIVIL
 FACULTAD DE INGENIERÍA Y ARQUITECTURA ESCUELA PROFESIONAL DE INGENIERÍA CIVIL I. DATOS GENERALES SILABO DE CÁLCULO VECTORIAL 1.0. Unidad Académica : Ingeniería Civil 1.1. Semestre Académico : 2018 1B 1.2.
FACULTAD DE INGENIERÍA Y ARQUITECTURA ESCUELA PROFESIONAL DE INGENIERÍA CIVIL I. DATOS GENERALES SILABO DE CÁLCULO VECTORIAL 1.0. Unidad Académica : Ingeniería Civil 1.1. Semestre Académico : 2018 1B 1.2.
PENDIENTES DE MATEMÁTICAS DE 3º ESO (CURSO )
") PENDIENTES DE MATEMÁTICAS DE 3º ESO (CURSO 2015-2016) CRITERIOS E INDICADORES Se detallan a continuación los criterios de evaluación junto con sus indicadores de contenidos asociados. Criterio 1: Identificar
PENDIENTES DE MATEMÁTICAS DE 3º ESO (CURSO 2015-2016) CRITERIOS E INDICADORES Se detallan a continuación los criterios de evaluación junto con sus indicadores de contenidos asociados. Criterio 1: Identificar
CONTENIDOS MÍNIMOS MATEMÁTICAS 2º Y 4º E.S.O.
 CONTENIDOS MÍNIMOS MATEMÁTICAS 2º Y 4º E.S.O. Matemáticas 2º E.S.O. a) Contenidos comunes. Utilizar estrategias y técnicas sencillas en la resolución de problemas. b) Números. Conocer los conceptos de
CONTENIDOS MÍNIMOS MATEMÁTICAS 2º Y 4º E.S.O. Matemáticas 2º E.S.O. a) Contenidos comunes. Utilizar estrategias y técnicas sencillas en la resolución de problemas. b) Números. Conocer los conceptos de
SIMPOSIO SIRGAS 2016 Instituto Geográfico Militar Quito-Ecuador de noviembre 2016
 SIMPOSIO SIRGAS 2016 Instituto Geográfico Militar Quito-Ecuador 16-18 de noviembre 2016 Cálculo de coordenadas usando el método Precise Point Positioning PPP estático mediante el software libre RTKLIB
SIMPOSIO SIRGAS 2016 Instituto Geográfico Militar Quito-Ecuador 16-18 de noviembre 2016 Cálculo de coordenadas usando el método Precise Point Positioning PPP estático mediante el software libre RTKLIB
CINEMÁTICA 2. Mecánica de Fluidos Avanzada UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL DEPARTAMENTO DE HIDRÁULICA E HIDROLOGÍA
 CINEMÁTICA 2 Mecánica de Fluidos Avanzada UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL DEPARTAMENTO DE HIDRÁULICA E HIDROLOGÍA CAMPO DE VELOCIDADES El campo de velocidad está constituido
CINEMÁTICA 2 Mecánica de Fluidos Avanzada UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL DEPARTAMENTO DE HIDRÁULICA E HIDROLOGÍA CAMPO DE VELOCIDADES El campo de velocidad está constituido
- Resolver problemas que involucren probabilidad clásica, unión e intersección de dos eventos
 ANGLO AMERICAN INTERNATIONAL SCHOOL ÁREA DE CIENCIAS, MATEMÁTICAS Y SALUD La formulación de un problema, es más importante que su solución Los Refugios del Arrayan 1653. Fonos 23215497-23215480 colegio@angloamerican.cl
ANGLO AMERICAN INTERNATIONAL SCHOOL ÁREA DE CIENCIAS, MATEMÁTICAS Y SALUD La formulación de un problema, es más importante que su solución Los Refugios del Arrayan 1653. Fonos 23215497-23215480 colegio@angloamerican.cl
Ministerio de Educación Pública Dirección de Gestión y Evaluación de la Calidad Departamento de Evaluación Académica y Certificación.
 Matemáticas Distribución de ítems para la prueba nacional Modalidad Académica (Diurnos Nocturnos) Convocatorias 016 ESTIMADO DOCENTE: En la modalidad de colegios académico, la Prueba de Bachillerato 016
Matemáticas Distribución de ítems para la prueba nacional Modalidad Académica (Diurnos Nocturnos) Convocatorias 016 ESTIMADO DOCENTE: En la modalidad de colegios académico, la Prueba de Bachillerato 016
UNIVERSIDAD AUTÓNOMA DE MADRID PRUEBA DE ACCESO A LA UNIVERSIDAD PARA MAYORES DE 25 AÑOS Convocatoria 2017
 INSTRUCCIONES GENERALES Y VALORACIÓN INSTRUCCIONES: Escoja entre una de las dos opciones A o B. Lea con atención y detenimiento los enunciados de las cuestiones y responda de manera razonada a los puntos
INSTRUCCIONES GENERALES Y VALORACIÓN INSTRUCCIONES: Escoja entre una de las dos opciones A o B. Lea con atención y detenimiento los enunciados de las cuestiones y responda de manera razonada a los puntos
MÉTODO DE LOS ELEMENTOS FINITOS.
 de MÉTODO DE LOS ELEMENTOS FINITOS. Castillo Madrid, 23 de Noviembre de 26 Índice de 2 3 4 de de El de los Elementos Finitos (M.E.F.) es un procedimiento numérico para resolver ecuaciones diferenciales
de MÉTODO DE LOS ELEMENTOS FINITOS. Castillo Madrid, 23 de Noviembre de 26 Índice de 2 3 4 de de El de los Elementos Finitos (M.E.F.) es un procedimiento numérico para resolver ecuaciones diferenciales
EXPERIENCIAS MUNICIPALES DE CAMBIO DE DATUM A ETRS89 Y PUBLICACIÓN DE LA CARTOGRAFÍA BASE EN UNA IDE
 EXPERIENCIAS MUNICIPALES DE CAMBIO DE DATUM A ETRS89 Y PUBLICACIÓN DE LA CARTOGRAFÍA BASE EN UNA IDE Juan Miguel Álvarez Paredes Socio Director de Topografía y Cartografía Geograma S.L. Castillo de Lantarón,
EXPERIENCIAS MUNICIPALES DE CAMBIO DE DATUM A ETRS89 Y PUBLICACIÓN DE LA CARTOGRAFÍA BASE EN UNA IDE Juan Miguel Álvarez Paredes Socio Director de Topografía y Cartografía Geograma S.L. Castillo de Lantarón,
MATHEMATICA. Geometría - Triángulos. Ricardo Villafaña Figueroa. Ricardo Villafaña Figueroa. Material realizado con Mathematica y Geometry Expressions
 MATHEMATICA Geometría - Triángulos Material realizado con Mathematica y Geometry Expressions Contenido TRIÁNGULOS... 3 Cálculo de los ángulos interiores de un triángulo... 3 Baricentro... 6 Ortocentro...
MATHEMATICA Geometría - Triángulos Material realizado con Mathematica y Geometry Expressions Contenido TRIÁNGULOS... 3 Cálculo de los ángulos interiores de un triángulo... 3 Baricentro... 6 Ortocentro...
Algunas Distribuciones Continuas de Probabilidad. UCR ECCI CI-1352 Probabilidad y Estadística Prof. M.Sc. Kryscia Daviana Ramírez Benavides
 Algunas Distribuciones Continuas de Probabilidad UCR ECCI CI-1352 Probabilidad y Estadística Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción El comportamiento de una variable aleatoria queda
Algunas Distribuciones Continuas de Probabilidad UCR ECCI CI-1352 Probabilidad y Estadística Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción El comportamiento de una variable aleatoria queda
Unidad 5: Geometría analítica del plano.
 Geometría analítica del plano 1 Unidad 5: Geometría analítica del plano. 1.- Vectores. Operaciones con vectores. Un vector fijo es un segmento entre dos puntos, A y B del plano, al que se le da una orientación
Geometría analítica del plano 1 Unidad 5: Geometría analítica del plano. 1.- Vectores. Operaciones con vectores. Un vector fijo es un segmento entre dos puntos, A y B del plano, al que se le da una orientación
DISTRIBUCIÓN SEGÚN HABILIDADES GENERALES Y ESPECÍFICAS Prueba 2. El desarrollo de estos temas los puede encontrar oprimiendo el siguiente botón.
 DISTRIBUCIÓN SEGÚN HABILIDADES GENERALES Y ESPECÍFICAS Prueba 2 El desarrollo de estos temas los puede encontrar oprimiendo el siguiente botón. http://www.costarica.elmaestroencasa.com/e-books/elmec/bach-a-tu-medida-2/matematica-a-tu-medida-02-2017.pdf
DISTRIBUCIÓN SEGÚN HABILIDADES GENERALES Y ESPECÍFICAS Prueba 2 El desarrollo de estos temas los puede encontrar oprimiendo el siguiente botón. http://www.costarica.elmaestroencasa.com/e-books/elmec/bach-a-tu-medida-2/matematica-a-tu-medida-02-2017.pdf
Caracterización de la incertidumbre del precio futuro del cobre
 USc/lb Caracterización de la incertidumbre del precio futuro del cobre La incertidumbre en un modelo de programación estocástica debe tener la estructura de árbol de escenarios, como se muestra en la Figura
USc/lb Caracterización de la incertidumbre del precio futuro del cobre La incertidumbre en un modelo de programación estocástica debe tener la estructura de árbol de escenarios, como se muestra en la Figura
Matemáticas 3º ESO. CRITERIOS EVALUACIÓN (Orden 9 de mayo de 2007)
") Matemáticas 3º ESO CRITERIOS EVALUACIÓN (Orden 9 de mayo de 2007) C1. Identificar y utilizar los distintos tipos de números, sus operaciones y propiedades, para recoger, transformar e intercambiar información
Matemáticas 3º ESO CRITERIOS EVALUACIÓN (Orden 9 de mayo de 2007) C1. Identificar y utilizar los distintos tipos de números, sus operaciones y propiedades, para recoger, transformar e intercambiar información
Elementos de geometría útiles para la localización espacial
 Elementos de geometría útiles para la localización espacial Por qué los necesitamos un sistema de coordenadas? Ubicar espacialmente lo que se mide u observa Posicionar objetos Navegar Replantear Volver
Elementos de geometría útiles para la localización espacial Por qué los necesitamos un sistema de coordenadas? Ubicar espacialmente lo que se mide u observa Posicionar objetos Navegar Replantear Volver
ESPACIOS VECTORIALES Y APLICACIONES LINEALES
 Departamento de Matemática Aplicada II E.E.I. ÁLGEBRA Y ESTADÍSTICA Boletín n o (010-011 ESPACIOS VECTORIALES Y APLICACIONES LINEALES 1. En el espacio vectorial ordinario R 4 estudiar cuáles de los siguientes
Departamento de Matemática Aplicada II E.E.I. ÁLGEBRA Y ESTADÍSTICA Boletín n o (010-011 ESPACIOS VECTORIALES Y APLICACIONES LINEALES 1. En el espacio vectorial ordinario R 4 estudiar cuáles de los siguientes
MINISTERIO DE EDUCACIÓN PÚBLICA DIRECCIÓN DE GESTIÓN Y EVALUACIÓN DE LA CALIDAD Departamento de Evaluación Académica y Certificación
 MINISTERIO DE EDUCACIÓN PÚBLICA DIRECCIÓN DE GESTIÓN Y EVALUACIÓN DE LA CALIDAD Departamento de Evaluación Académica y Certificación Número de ítems por habilidades generales del Programa de estudio Pruebas
MINISTERIO DE EDUCACIÓN PÚBLICA DIRECCIÓN DE GESTIÓN Y EVALUACIÓN DE LA CALIDAD Departamento de Evaluación Académica y Certificación Número de ítems por habilidades generales del Programa de estudio Pruebas
georreferenciación lección 11 correcciones geométricas Teledetección Dpto. de Ingeniería Cartográfica Carlos Pinilla Ruiz
 1 georreferenciación lección 11 sumario 2 Introducción. Corrección polinómica. Establecimiento de los puntos de control. Funciones de transformación. Transferencia de los ND. Desplazamiento debido al relieve.
1 georreferenciación lección 11 sumario 2 Introducción. Corrección polinómica. Establecimiento de los puntos de control. Funciones de transformación. Transferencia de los ND. Desplazamiento debido al relieve.
Cálculo de Geodésicas en Superficies de Revolución
 Cálculo de Geodésicas en Superficies de Revolución Superficies de Revolución Sea S R 3 la superficie de revolución obtenida al girar una curva regular del plano XZ que no corte al eje Z alrededor del mismo.
Cálculo de Geodésicas en Superficies de Revolución Superficies de Revolución Sea S R 3 la superficie de revolución obtenida al girar una curva regular del plano XZ que no corte al eje Z alrededor del mismo.
AUXILIAR 1 PROBLEMA 1
 AUXILIAR 1 PROBLEMA 1 Calcular el campo eléctrico en cualquier punto del espacio, producido por una recta de carga infinita (con densidad lineal de carga λ0). Luego, aplicar el teorema de Gauss para obtener
AUXILIAR 1 PROBLEMA 1 Calcular el campo eléctrico en cualquier punto del espacio, producido por una recta de carga infinita (con densidad lineal de carga λ0). Luego, aplicar el teorema de Gauss para obtener
Guadalajara, Jalisco 18, y 19 y 20 de abril
 Guadalajara, Jalisco 18, y 19 y 20 de abril Taller: Propagación de coordenadas en ITRF usando datos GPS Eje Rector: Construcción de Capacidades Ing. Rubén Esquivel Ramírez INEGI Guadalajara, Jalisco, 19
Guadalajara, Jalisco 18, y 19 y 20 de abril Taller: Propagación de coordenadas en ITRF usando datos GPS Eje Rector: Construcción de Capacidades Ing. Rubén Esquivel Ramírez INEGI Guadalajara, Jalisco, 19
Curso INAP: Fundamentos y aplicaciones de los Sistemas de Posicionamiento (GPS)
") Curso INAP: Fundamentos y aplicaciones de los Sistemas de Posicionamiento (GPS) 1 Conceptos básicos de Cartografía Esta obra se ofrece bajo una licencia Creative Commons Reconocimiento- NoComercial-SinObraDerivada
Curso INAP: Fundamentos y aplicaciones de los Sistemas de Posicionamiento (GPS) 1 Conceptos básicos de Cartografía Esta obra se ofrece bajo una licencia Creative Commons Reconocimiento- NoComercial-SinObraDerivada
Curso INAP: Fundamentos y aplicaciones de los Sistemas de Posicionamiento (GPS)
") Curso INAP: Fundamentos y aplicaciones de los Sistemas de Posicionamiento (GPS) 1 Conceptos básicos de Cartografía Esta obra se ofrece bajo una licencia Creative Commons Reconocimiento- NoComercial-SinObraDerivada
Curso INAP: Fundamentos y aplicaciones de los Sistemas de Posicionamiento (GPS) 1 Conceptos básicos de Cartografía Esta obra se ofrece bajo una licencia Creative Commons Reconocimiento- NoComercial-SinObraDerivada
Econometría II. Hoja de Problemas 1
 Econometría II. Hoja de Problemas 1 Nota: En todos los contrastes tome como nivel de significación 0.05. 1. SeanZ 1,...,Z T variables aleatorias independientes, cada una de ellas con distribución de Bernouilli
Econometría II. Hoja de Problemas 1 Nota: En todos los contrastes tome como nivel de significación 0.05. 1. SeanZ 1,...,Z T variables aleatorias independientes, cada una de ellas con distribución de Bernouilli
Puntuación Z ESTADÍSTICA APLICADA A LA EDUCACIÓN I. L.A. y M.C.E. Emma Linda Diez Knoth
 1 Puntuación Z ESTADÍSTICA APLICADA A LA EDUCACIÓN I Qué es la Puntuación Z? 2 Los puntajes Z son transformaciones que se pueden hacer a los valores o puntuaciones de una distribución normal, con el propósito
1 Puntuación Z ESTADÍSTICA APLICADA A LA EDUCACIÓN I Qué es la Puntuación Z? 2 Los puntajes Z son transformaciones que se pueden hacer a los valores o puntuaciones de una distribución normal, con el propósito
Tema 2: Determinantes
 Tema : Determinantes.- a) Encontrar los valores de λ para los que la matriz λ A = 0 λ λ 0 es invertible b) Para λ = hallar la inversa de A comprobar el resultado c) Resolver el sistema x 0 A = 0 z 0 para
Tema : Determinantes.- a) Encontrar los valores de λ para los que la matriz λ A = 0 λ λ 0 es invertible b) Para λ = hallar la inversa de A comprobar el resultado c) Resolver el sistema x 0 A = 0 z 0 para
ETAPAS BÁSICAS DEL ANÁLISIS MATRICIAL DE UN SISTEMA DISCRETO. Mercedes López Salinas
 ETAPAS BÁSICAS DEL ANÁLISIS MATRICIAL DE UN SISTEMA DISCRETO Mercedes López Salinas PhD. Ing. Civil elopez@uazuay.edu.ec ELEMENTOS FINITOS Facultad de Ciencia y Tecnología Escuela de Ingeniería Civil y
ETAPAS BÁSICAS DEL ANÁLISIS MATRICIAL DE UN SISTEMA DISCRETO Mercedes López Salinas PhD. Ing. Civil elopez@uazuay.edu.ec ELEMENTOS FINITOS Facultad de Ciencia y Tecnología Escuela de Ingeniería Civil y
1º BACHILLERATO HUMANIDADES Y CIENCIAS SOCIALES MATEMÁTICAS APLICADAS A LAS CIENCIAS SOCIALES I PENDIENTES
 1º BACHILLERATO HUMANIDADES Y CIENCIAS SOCIALES MATEMÁTICAS APLICADAS A LAS CIENCIAS SOCIALES I PENDIENTES 1.- INTRODUCCIÓN AL NÚMERO REAL Realización de operaciones con números reales. Ordenación de los
1º BACHILLERATO HUMANIDADES Y CIENCIAS SOCIALES MATEMÁTICAS APLICADAS A LAS CIENCIAS SOCIALES I PENDIENTES 1.- INTRODUCCIÓN AL NÚMERO REAL Realización de operaciones con números reales. Ordenación de los
REPORTES NACIONALES: ACTIVIDADES RECIENTES DESARROLLADAS BAJO EL PROYECTO SIRGAS. Junio, 2007
 REPORTES NACIONALES: ACTIVIDADES RECIENTES DESARROLLADAS BAJO EL PROYECTO SIRGAS Junio, 2007 MARCO DE REFERENCIA GEODESICO NACIONAL En base a los puntos SIRGAS establecidos sobre territorio boliviano el
REPORTES NACIONALES: ACTIVIDADES RECIENTES DESARROLLADAS BAJO EL PROYECTO SIRGAS Junio, 2007 MARCO DE REFERENCIA GEODESICO NACIONAL En base a los puntos SIRGAS establecidos sobre territorio boliviano el
ANEJO nº 2: CARTOGRAFÍA y TOPOGRAFÍA.
 itrae desarrollos urbanisticos sl Pág. 1 ANEJO nº 2: CARTOGRAFÍA y TOPOGRAFÍA. 1. Objeto. Toma de datos. 2. Sistema de coordenadas. 3. Trabajos de planimetría y altimetría. 4. Anexo : Informe Topografico.
itrae desarrollos urbanisticos sl Pág. 1 ANEJO nº 2: CARTOGRAFÍA y TOPOGRAFÍA. 1. Objeto. Toma de datos. 2. Sistema de coordenadas. 3. Trabajos de planimetría y altimetría. 4. Anexo : Informe Topografico.
dx = x El tensor x/ X se denomina tensor gradiente de la deformación F = x
 Capítulo 2 Cinemática El desarrollo de las expresiones contenidas en este capítulo se lleva a cabo en un sistema de referencia general cartesiano {I 1 I 2 I 3 }. La notación es, con algunas diferencias,
Capítulo 2 Cinemática El desarrollo de las expresiones contenidas en este capítulo se lleva a cabo en un sistema de referencia general cartesiano {I 1 I 2 I 3 }. La notación es, con algunas diferencias,
Trabajo Final Agrimensura 3D con tecnología LiDAR
 Trabajo Final Agrimensura 3D con tecnología LiDAR UNIVERSIDAD NACIONAL DE LA PLATA FACULTAD DE INGENIERIA DEPARTAMENTO DE AGRIMENSURA Ing. Agrimensora Sofia Falip Conceptos teóricos sobre LiDAR estático
Trabajo Final Agrimensura 3D con tecnología LiDAR UNIVERSIDAD NACIONAL DE LA PLATA FACULTAD DE INGENIERIA DEPARTAMENTO DE AGRIMENSURA Ing. Agrimensora Sofia Falip Conceptos teóricos sobre LiDAR estático
Tema 3: Transformaciones Geométricas
 J. Ribelles SIE020: Síntesis de Imagen y Animación Institute of New Imaging Technologies, Universitat Jaume I Contenido Introducción 1 Introducción 2 Traslación Escalado Rotación 3 4 5 6 Introducción Por
J. Ribelles SIE020: Síntesis de Imagen y Animación Institute of New Imaging Technologies, Universitat Jaume I Contenido Introducción 1 Introducción 2 Traslación Escalado Rotación 3 4 5 6 Introducción Por
INSTITUCIÓN EDUCATIVA TÉCNICA ALFONSO PALACIO RUDAS IBAGUE
 INSTITUCIÓN EDUCATIVA TÉCNICA ALFONSO PALACIO RUDAS IBAGUE - 2012 GUIA 01 DURACIÓN: PRIMER PERIODO Desarrollar en el estudiante la habilidad en la solución de problemas con las operaciones matemáticas
INSTITUCIÓN EDUCATIVA TÉCNICA ALFONSO PALACIO RUDAS IBAGUE - 2012 GUIA 01 DURACIÓN: PRIMER PERIODO Desarrollar en el estudiante la habilidad en la solución de problemas con las operaciones matemáticas
INSTRUCCIONES GENERALES Y VALORACIÓN
 UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBA DE ACCESO A LAS ENSEÑANZAS UNIVERSITARIAS OFICIALES DE GRADO Examen-Modelo para el curso 2014-2015 MATERIA: MATEMÁTICAS II INSTRUCCIONES GENERALES
UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBA DE ACCESO A LAS ENSEÑANZAS UNIVERSITARIAS OFICIALES DE GRADO Examen-Modelo para el curso 2014-2015 MATERIA: MATEMÁTICAS II INSTRUCCIONES GENERALES
Problemas de Selectividad de Matemáticas II Comunidad de Madrid (Resueltos) Isaac Musat Hervás
 Isaac Musat Hervás") Problemas de Selectividad de Matemáticas II Comunidad de Madrid Resueltos Isaac Musat Hervás 22 de mayo de 201 Capítulo 4 Año 200 4.1. Modelo 200 - Opción A Problema 4.1.1 2 puntos Determinar los valores
Problemas de Selectividad de Matemáticas II Comunidad de Madrid Resueltos Isaac Musat Hervás 22 de mayo de 201 Capítulo 4 Año 200 4.1. Modelo 200 - Opción A Problema 4.1.1 2 puntos Determinar los valores
Matemáticas Aplicadas
 Matemáticas Aplicadas para Diseño de Videojuegos 5. Matrices y Geometría Vectorial Contenidos Vectores Componente de un vector. Vectores unitarios. Módulo, suma y producto escalar. Gráficos vectoriales.
Matemáticas Aplicadas para Diseño de Videojuegos 5. Matrices y Geometría Vectorial Contenidos Vectores Componente de un vector. Vectores unitarios. Módulo, suma y producto escalar. Gráficos vectoriales.
Conocimiento de Matemáticas 2º ESO. a) Contenidos.
 Contenidos.") Conocimiento de Matemáticas 2º ESO. a) Contenidos. Bloque 1. Contenidos comunes. Planificación del proceso de resolución de problemas: análisis de la situación, selección y relación entre los datos, selección
Conocimiento de Matemáticas 2º ESO. a) Contenidos. Bloque 1. Contenidos comunes. Planificación del proceso de resolución de problemas: análisis de la situación, selección y relación entre los datos, selección
Tema 2 Sistema y marco de referencia terrestre. Sistemas de coordenadas
 2.1 Introducción 2.2 Sistema de referencia terrestre geocéntrico Convencional 2.2.1 Definición del sistema 2.2.2 2.2.2.1 Sistema de coordenadas cartesianas 2.2.2.2 Sistema de coordenadas Geográficas 2.2.2.3
2.1 Introducción 2.2 Sistema de referencia terrestre geocéntrico Convencional 2.2.1 Definición del sistema 2.2.2 2.2.2.1 Sistema de coordenadas cartesianas 2.2.2.2 Sistema de coordenadas Geográficas 2.2.2.3
Departamento de Matemática Aplicada a la I.T. de Telecomunicación
 Departamento de Matemática Aplicada a la I.T. de Telecomunicación ASIGNATURA: ESTADÍSTICA Y PROCESOS ESTOCÁSTICOS CONVOCATORIA: ENERO 22/23 FECHA: 9 de Enero de 23 Duración del examen: 3 horas Fecha publicación
Departamento de Matemática Aplicada a la I.T. de Telecomunicación ASIGNATURA: ESTADÍSTICA Y PROCESOS ESTOCÁSTICOS CONVOCATORIA: ENERO 22/23 FECHA: 9 de Enero de 23 Duración del examen: 3 horas Fecha publicación
Tema 1. Espacios Vectoriales. Sistemas de ecuaciones.
 Tema 1. Espacios Vectoriales. Sistemas de ecuaciones. Álgebra Lineal Escuela Politécnica Superior Universidad de Málaga Emilio Muñoz-Velasco (Basado en los apuntes de Jesús Medina e Inmaculada Fortes)
Tema 1. Espacios Vectoriales. Sistemas de ecuaciones. Álgebra Lineal Escuela Politécnica Superior Universidad de Málaga Emilio Muñoz-Velasco (Basado en los apuntes de Jesús Medina e Inmaculada Fortes)
CONTENIDOS MATEMÁTICA
 CURRICULUM EDUCATIVO UMÁXIMO Los contenidos de la Plataforma UMÁXIMO están encapsulados en etapas de estudio, que corresponden a unidades temáticas. Todo el material de estudio está alineado a los Objetivos
CURRICULUM EDUCATIVO UMÁXIMO Los contenidos de la Plataforma UMÁXIMO están encapsulados en etapas de estudio, que corresponden a unidades temáticas. Todo el material de estudio está alineado a los Objetivos
Tema 2 Sistema y marco de referencia terrestre. Sistemas de coordenadas
 2.1 Introducción 2.2 Sistema de referencia terrestre geocéntrico Convencional 2.2.1 Definición del sistema 2.2.2 2.2.2.1 Sistema de coordenadas cartesianas y esféricas 2.2.2.2 Sistema de coordenadas Geográficas
2.1 Introducción 2.2 Sistema de referencia terrestre geocéntrico Convencional 2.2.1 Definición del sistema 2.2.2 2.2.2.1 Sistema de coordenadas cartesianas y esféricas 2.2.2.2 Sistema de coordenadas Geográficas
Transformaciones Isométricas
 Transformaciones Isométricas I o Medio Profesor: Alberto Alvaradejo Ojeda Índice 1. Transformación Isométrica 3 1.1. Traslación..................................... 3 1.2. Ejercicios.....................................
Transformaciones Isométricas I o Medio Profesor: Alberto Alvaradejo Ojeda Índice 1. Transformación Isométrica 3 1.1. Traslación..................................... 3 1.2. Ejercicios.....................................
Fundamentos de Robótica
 Fundamentos de Robótica Herramientas Matemáticas para la Localización Espacial Matrices de Rotación Ricardo-Franco Mendoza-Garcia rmendozag@uta.cl Escuela Universitaria de Ingeniería Mecánica Universidad
Fundamentos de Robótica Herramientas Matemáticas para la Localización Espacial Matrices de Rotación Ricardo-Franco Mendoza-Garcia rmendozag@uta.cl Escuela Universitaria de Ingeniería Mecánica Universidad
UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBA DE ACCESO A LAS ENSEÑANZAS UNIVERSITARIAS OFICIALES DE GRADO MATERIA: MATEMÁTICAS II
 UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBA DE ACCESO A LAS ENSEÑANZAS UNIVERSITARIAS OFICIALES DE GRADO MATERIA: MATEMÁTICAS II INSTRUCCIONES GENERALES Y VALORACIÓN El alumno contestará a
UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBA DE ACCESO A LAS ENSEÑANZAS UNIVERSITARIAS OFICIALES DE GRADO MATERIA: MATEMÁTICAS II INSTRUCCIONES GENERALES Y VALORACIÓN El alumno contestará a
Tema 2 Datos multivariantes
 Aurea Grané Máster en Estadística Universidade Pedagógica 1 Aurea Grané Máster en Estadística Universidade Pedagógica 2 Tema 2 Datos multivariantes 1 Matrices de datos 2 Datos multivariantes 2 Medias,
Aurea Grané Máster en Estadística Universidade Pedagógica 1 Aurea Grané Máster en Estadística Universidade Pedagógica 2 Tema 2 Datos multivariantes 1 Matrices de datos 2 Datos multivariantes 2 Medias,
Universidad Autónoma de Sinaloa Escuela de Ciencias de la Tierra
 Universidad Autónoma de Sinaloa Escuela de Ciencias de la Tierra LICENCIATURA EN INGENIERÍA GEODÉSICA PROGRAMA DE ESTUDIOS 1. DATOS DE IDENTIFICACIÓN UNIDAD DE GEODESIA GEOMÉTRICA APRENDIZAJE Clave: (pendiente)
Universidad Autónoma de Sinaloa Escuela de Ciencias de la Tierra LICENCIATURA EN INGENIERÍA GEODÉSICA PROGRAMA DE ESTUDIOS 1. DATOS DE IDENTIFICACIÓN UNIDAD DE GEODESIA GEOMÉTRICA APRENDIZAJE Clave: (pendiente)
INDICE. Conceptos Generales de la Proyección UTM 2. Transformación de Coordenadas Geográficas a Planas UTM 12
 INDICE Conceptos Generales de la Proyección UTM 2 Formulas de Proyección UTM 9 Transformación de Coordenadas Geográficas a Planas UTM 12 Transformación de Coordenadas Planas UTM a Geográficas 15 Acimut
INDICE Conceptos Generales de la Proyección UTM 2 Formulas de Proyección UTM 9 Transformación de Coordenadas Geográficas a Planas UTM 12 Transformación de Coordenadas Planas UTM a Geográficas 15 Acimut