8.1 Hacer el diagrama polar, log magnitud-fase y diagramas de Bode de:
|
|
|
- Gregorio Villalobos Arroyo
- hace 5 años
- Vistas:
Transcripción



 y7=20*log")
.")
1 8.1 Hacer el diagrama polar, log magnitud-fase y diagramas de Bode de: a) Evaluando w en g(jw). Convención: w=x y4= magnitud y5=ángulo y6=g (w*j) y7=20*log (magnitud) Nyquist b) Evaluando w en g(jw). Convención: w=x y4= magnitud y5=ángulo y6=g (w*j) y7=20*log (magnitud) Nyquist
 = -6.02 db b) Normalizando la función. 20*log (1/2) = -6.")
2 8.2 Haga los diagramas de Bode para: a) Normalizando la función. 20*log (1/2) = db b) Normalizando la función. 20*log (1/2) = db
 Si se sabe que la función de transferencia es estable: Si es sistema es estable, el denominador debe ser positivo")
3 c) 8.3 Considere la grafica de ganancia de Bode: a) Halle todas las funciones que tengan esa grafica. Para frecuencias bajas tenemos 10dB, por lo tanto: 20*log k = 10, en donde k= ± 10 b) Si se sabe que la función de transferencia es estable: Si es sistema es estable, el denominador debe ser positivo c) Si se sabe que la función tiene mínima fase: Si la fase es mínima, los ceros se encuentran en el semiplano izquierdo d) Si cumple con b) y c). Esta función es única? No es única, la ganancia puede ser positiva o negativa.




4 8.4 Halle las funciones de los diagramas de bode mostrados: a) b) c)
5 8.5 Considere Teniendo en cuenta el diagrama de bode, que son k y b?

: La función G(s) tiene un polo abierto en el semiplano positivo, y se cumple el criterio de estabilidad ya que no")
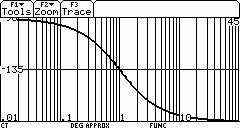
6 8.6 Una respuesta típica de frecuencia de una amplificador operacional Fairchild ±A741 es la mostrada en la figura p8.6. Cual es su función de transferencia? Aplicando los criterios vistos en clase obtenemos: 8.7 Utilice el criterio de estabilidad de Nyquist para las siguientes funciones en realimentación unitaria sin compensador: a) Diagrama de Nyquist Haciendo la realimentación, obtenemos una G o (s): La función G(s) tiene un polo abierto en el semiplano positivo, y se cumple el criterio de estabilidad ya que no pasa por el punto (-1,0) y encierra el punto critico N veces (Z=0 y P=1), es decir, una vez Es estable
7 b) Haciendo la realimentación, obtenemos una G o (s): Diagrama de Nyquist La función G(s) tiene un polo abierto en el semiplano positivo, y se cumple el criterio de estabilidad ya que no pasa por el punto (-1,0) y encierra el punto critico N veces (Z=0 y P=1), es decir, una vez Es estable c) Diagrama de Nyquist Haciendo la realimentación, obtenemos una G o (s): La función G(s) tiene un polo abierto en el semiplano positivo, y se cumple el criterio de estabilidad ya que no pasa por el punto (-1,0) y encierra el punto critico N veces (Z=0 y P=1), es decir, una vez Es estable
8 8.8 Considere un sistema de realimentación unitaria con compensador k en serie con G(s). Para la figura p8.8 (diagrama de Nyquist de G(s)). Cual es el rango de estabilidad para: Utilizando el Criterio de estabilidad de Nyquist: El Go(s) para un sistema de realimentación unitaria con compensación k en serie con G(s) es estable SI Y SOLO SI la función del diagrama de Nyquist de G(s) no pasa por el punto critico (-1/k,0) y el número de encierros, en sentido contrario a las manecillas de reloj, al punto (-1/k,0) es igual al número de polos abierto en el semiplano positivo (RHP) de G(s) Nota: Cumple también para k=1 a) Gl(s) no tiene polos ni ceros RHP: Como no tiene polos, significa que no debe encerrar el punto critico (-1/k,0) ni pasar por el, así que cumplirá siempre y cuando: - (-1/k)<-5 Y 16<(-1/k) + De donde obtenemos un rango de estabilidad para: -1/16<k<1/5 b) Gl(s) tiene un cero RHP y ningún polo RHP: Z=1 ; P=0 ; N=Z-P ; N=1 NO ES ESTABLE PARA NINGÚN k c) Gl(s) tiene un polo RHP. Z=0 ; P=1 ; N=-1 debe encerrar el punto critico una vez, por lo tanto: 0<k<16 d) Gl(s) tiene dos polos RHP y un cero RHP. Z=1 ; P=2 ; N=-1 debe encerrar el punto critico una vez, por lo tanto: 0<k<16 e) Gl(s) tiene tres polos RHP. Z=0 ; P=3 ; N=-3 NO ES ESTABLE PARA NINGÚN k, ya que no hay una parte del diagrama que encierre un punto 3 veces.
 Routh: b) Root-Locus Factorizando G(s) obtenemos: c) Nyquist *y6 bajo la misma")
9 8.9 Halle el rango de estabilidad para: Con realimentación unitaria y n compensador k en serie con g(s). Evalúe el rango de estabilidad usando: a) Routh: b) Root-Locus Factorizando G(s) obtenemos: c) Nyquist *y6 bajo la misma convención del punto 8.1
10 8.10 Cuál es la frecuencia de cruce de ganancia, la frecuencia de cruce de fase, el margen de ganancia, el margen de fase, la constante de error de posición y error de velocidad para las funciones de transferencia del punto 8.2? a) b) c) 8.11 Repita el numeral 8.10 para las funciones de transferencia calculadas en el numeral 8.4. a) b) c) 8.12
Sistemas de Control. Solución del Segundo Taller Unificado (II ) Ing. Adriana Aguirre
 Ing. Adriana Aguirre") Solución del Segundo Taller Unificado (II 2017-2018 Ing. Adriana Aguirre 16 de Enero del 2018 Ejercicio Para la siguiente función de transferencia de lazo abierto determine el diagrama de Nyquist correspondiente.
Solución del Segundo Taller Unificado (II 2017-2018 Ing. Adriana Aguirre 16 de Enero del 2018 Ejercicio Para la siguiente función de transferencia de lazo abierto determine el diagrama de Nyquist correspondiente.
Método aproximado para conocer la localización de las raíces de la ecuación característica con respecto a los semiplanos izquierdo y derecho. (12.
 1. Criterio de estabilidad de Nyquist 1.1 Gráfica de Nyquist Gráfica de L(jω) G(jω)H(jω) en coordenadas polares de Im[L(jω)], Re[L(jω)] con ω variando desde hasta 0. Características: provee información
1. Criterio de estabilidad de Nyquist 1.1 Gráfica de Nyquist Gráfica de L(jω) G(jω)H(jω) en coordenadas polares de Im[L(jω)], Re[L(jω)] con ω variando desde hasta 0. Características: provee información
Diseño de sistemas de control
 Diseño de sistemas de control Compensadores de adelanto, atraso y adelanto-atraso. (Mediante la respuesta en frecuencia) Prof. Gerardo Torres Sistemas de Control Compensación mediante la respuesta en frecuencia
Diseño de sistemas de control Compensadores de adelanto, atraso y adelanto-atraso. (Mediante la respuesta en frecuencia) Prof. Gerardo Torres Sistemas de Control Compensación mediante la respuesta en frecuencia
Sistemas Control Embebidos e Instrumentación Electrónica UNIVERSIDAD EAFIT Semestre 2010/2 2009/2
 DIAGRAMA DE NYQUIST Semestre 2010/2 La respuesta en frecuencia se basa en la respuesta en estado estacionario de un sistema ante una entrada senoidal. Un sistema lineal invariante en el tiempo, si es afectado
DIAGRAMA DE NYQUIST Semestre 2010/2 La respuesta en frecuencia se basa en la respuesta en estado estacionario de un sistema ante una entrada senoidal. Un sistema lineal invariante en el tiempo, si es afectado
PRÁCTICA Nº 10. ANÁLISIS DE LA RESPUESTA EN FRECUENCIA UTILIZANDO MATLAB. DIAGRAMA DE NYQUIST
 PRÁCTICA Nº 10. ANÁLISIS DE LA RESPUESTA EN FRECUENCIA UTILIZANDO MATLAB. DIAGRAMA DE NYQUIST 10. DIAGRAMA DE NYQUIST... 1 10.1. OBJETIVOS... 1 10.. CARACTERÍSTICAS DE LA RESPUESTA EN FRECUENCIA... 1 10.3.
PRÁCTICA Nº 10. ANÁLISIS DE LA RESPUESTA EN FRECUENCIA UTILIZANDO MATLAB. DIAGRAMA DE NYQUIST 10. DIAGRAMA DE NYQUIST... 1 10.1. OBJETIVOS... 1 10.. CARACTERÍSTICAS DE LA RESPUESTA EN FRECUENCIA... 1 10.3.
Un sistema con realimentación unitaria tiene una función de transferencia en lazo abierto
 Un sistema con realimentación unitaria tiene una función de transferencia en lazo abierto G p ( s) k s( s + )( s + 5) a)para el sistema en lazo abierto, y suponiendo el valor k : Obtener la expresión analítica
Un sistema con realimentación unitaria tiene una función de transferencia en lazo abierto G p ( s) k s( s + )( s + 5) a)para el sistema en lazo abierto, y suponiendo el valor k : Obtener la expresión analítica
DISEÑO DE COMPENSADORES USANDO LOS DIAGRAMAS DE BODE
 DISEÑO DE COMPENSADORES USANDO LOS DIAGRAMAS DE BODE INTRODUCCIÒN Se abordará a continuación el problema de especificar los parámetros de compensadores eléctricos típicos, que son las formas aproximadas
DISEÑO DE COMPENSADORES USANDO LOS DIAGRAMAS DE BODE INTRODUCCIÒN Se abordará a continuación el problema de especificar los parámetros de compensadores eléctricos típicos, que son las formas aproximadas
1 Problemas Resueltos
 1) Con la intención de plantear mejoras en un sistema de control de composición, se realizaron experiencias sobre el sistema a lazo abierto y se obtuvo su respuesta frecuencial, la cual se muestra en la
1) Con la intención de plantear mejoras en un sistema de control de composición, se realizaron experiencias sobre el sistema a lazo abierto y se obtuvo su respuesta frecuencial, la cual se muestra en la
ELECTRÓNICA III CRITERIOS DE ESTABILIDAD
 ELECTRÓNICA III CRITERIOS DE ESTABILIDAD 1 Estabilidad de un amplif. Reglamento realimentado La realimentación negativa mejora parámetros de un amplif. realimentado y modifica otros (Av, Zin, Zo). Hasta
ELECTRÓNICA III CRITERIOS DE ESTABILIDAD 1 Estabilidad de un amplif. Reglamento realimentado La realimentación negativa mejora parámetros de un amplif. realimentado y modifica otros (Av, Zin, Zo). Hasta
(s+2) s(s+1)(s+1+j)(s+1-j) Accionamiento Hidráulico
 s(s+1)(s+1+j)(s+1-j) Accionamiento Hidráulico") Problema ( puntos - 6 minutos) El seguidor de tensión de la figura está constituido por un amplificador operacional, AO, real. El AO tiene una ganancia de tensión diferencial en cadena abierta en continua,
Problema ( puntos - 6 minutos) El seguidor de tensión de la figura está constituido por un amplificador operacional, AO, real. El AO tiene una ganancia de tensión diferencial en cadena abierta en continua,
COMPENSACIÓN EN ADELANTO
 COMPENSACIÓN EN ADELANTO Produce un mejoramiento razonable en la respuesta transitoria y un cambio pequeño en la precisión en estado estable. Puede acentuar los efectos del ruido de alta frecuencia. Aumenta
COMPENSACIÓN EN ADELANTO Produce un mejoramiento razonable en la respuesta transitoria y un cambio pequeño en la precisión en estado estable. Puede acentuar los efectos del ruido de alta frecuencia. Aumenta
INSTITUTO POLITÉCNICO NACIONAL Escuela Superior de Ingeniería Mecánica y Eléctrica
 INSTITUTO POLITÉCNICO NACIONAL Escuela Superior de Ingeniería Mecánica y Eléctrica Ingeniería en Control y Automatización TEORÍA DE CONTROL 1: GUÍA PARA EL EXAMEN EXTRAORDINARIO (TEORÍA) Nombre: Grupo
INSTITUTO POLITÉCNICO NACIONAL Escuela Superior de Ingeniería Mecánica y Eléctrica Ingeniería en Control y Automatización TEORÍA DE CONTROL 1: GUÍA PARA EL EXAMEN EXTRAORDINARIO (TEORÍA) Nombre: Grupo
Trabajo autónomo 6: Diagrama de Bode y Nyquist
 Trabajo autónomo 6: Diagrama de Bode y Nyquist Nombre: Paralelo: Fecha: 11.1. Objetivos 11.1.1. Objetivo General Reforzar conocimientos referentes a gráficas en el dominio de la frecuencia haciendo uso
Trabajo autónomo 6: Diagrama de Bode y Nyquist Nombre: Paralelo: Fecha: 11.1. Objetivos 11.1.1. Objetivo General Reforzar conocimientos referentes a gráficas en el dominio de la frecuencia haciendo uso
1 Problemas Resueltos
 1) Para un sistema de control de retroaliementación unitaria se conoce el diagrama de bode de la función de transferencia a lazo abierto, la cual se muestra en la Fig. 1.1. A partir esta información se
1) Para un sistema de control de retroaliementación unitaria se conoce el diagrama de bode de la función de transferencia a lazo abierto, la cual se muestra en la Fig. 1.1. A partir esta información se
Sistemas Realimentados Simples Estabilidad de Sistemas Contínuos Diagramas de Bode
 Sistemas Realimentados Simples Estabilidad de Sistemas Contínuos Diagramas de Bode p.1/40 Sistema Contínuo U(s) E(s) K G(s) Y + (s) H(s) Figura 1: Sistema contínuo retroalimentado simple F (s) = Y (s)
Sistemas Realimentados Simples Estabilidad de Sistemas Contínuos Diagramas de Bode p.1/40 Sistema Contínuo U(s) E(s) K G(s) Y + (s) H(s) Figura 1: Sistema contínuo retroalimentado simple F (s) = Y (s)
Ingeniería de Control I - Examen 22.I.2005
 Escuela Superior de Ingenieros Universidad de Navarra Ingeniarien Goi Mailako Eskola Nafarroako Unibertsitatea Ingeniería de Control I - Examen 22.I.2005 Apellidos: Nombre: Nº de carnet: EJERCICIO 1 Diseñar
Escuela Superior de Ingenieros Universidad de Navarra Ingeniarien Goi Mailako Eskola Nafarroako Unibertsitatea Ingeniería de Control I - Examen 22.I.2005 Apellidos: Nombre: Nº de carnet: EJERCICIO 1 Diseñar
Ejercicio 3 Un sistema de control de velocidad de un motor de corriente continua se modela mediante la ecuación
 Trabajo práctico Nº 4 Fundamentos de control realimentado - Segundo cuatrimestre 2017 Ejercicio 1 Aplicando el criterio de estabilidad de Routh: i) Determine la cantidad de raíces en el semiplano derecho
Trabajo práctico Nº 4 Fundamentos de control realimentado - Segundo cuatrimestre 2017 Ejercicio 1 Aplicando el criterio de estabilidad de Routh: i) Determine la cantidad de raíces en el semiplano derecho
Como ejemplo, consideremos la función compleja P(s)= s 2 +1.
= s 2 +1.") Criterio de Estabilidad de Nyquist El criterio de Estabilidad de Nyquist está basado en un teorema de la variable compleja. Para entender este criterio primero se utilizarán los conceptos de transferencia
Criterio de Estabilidad de Nyquist El criterio de Estabilidad de Nyquist está basado en un teorema de la variable compleja. Para entender este criterio primero se utilizarán los conceptos de transferencia
VIII. Criterio de Estabilidad de Nyquist
 VIII. Criterio de Estabilidad de Nyquist Un sistema de control de retroalimentación simple como el mostrado en la figura 8., es estable si su Ecuación Característuica a Lazo Cerrado, F(s) = + G(s)H(s),
VIII. Criterio de Estabilidad de Nyquist Un sistema de control de retroalimentación simple como el mostrado en la figura 8., es estable si su Ecuación Característuica a Lazo Cerrado, F(s) = + G(s)H(s),
1. Problema (5 puntos ev. continua, 3 puntos ev. final -60 minutos) La función de transferencia de un proceso a controlar es: ( ) .
 La función de transferencia de un proceso a controlar es: ( ) .") Imaginary Axis APELLIDOS CURSO 3º GRUPO Enero 214 1. Problema (5 puntos ev. continua, 3 puntos ev. final -6 minutos) La función de transferencia de un proceso a controlar es: ( ). Se desea que la ( )(
Imaginary Axis APELLIDOS CURSO 3º GRUPO Enero 214 1. Problema (5 puntos ev. continua, 3 puntos ev. final -6 minutos) La función de transferencia de un proceso a controlar es: ( ). Se desea que la ( )(
TECNICAS DE DISEÑO Y COMPENSACION
 TECNICAS DE DISEÑO Y COMPENSACION Técnicas para sistemas SISO invariantes en el tiempo Basadas en el lugar de las raices y respuesta en frecuencia Especificaciones de funcionamiento Exactitud o precisión
TECNICAS DE DISEÑO Y COMPENSACION Técnicas para sistemas SISO invariantes en el tiempo Basadas en el lugar de las raices y respuesta en frecuencia Especificaciones de funcionamiento Exactitud o precisión
CONTROL DIGITAL Catedrático: Dr. Manuel Adam Medina Alumno: Ing. Jaimes Maldonado José Luis
 Diseño de controladores por el método de respuesta en frecuencia de sistemas discretos. (método gráfico) CONTROL DIGITAL 07--0 Catedrático: Dr. Manuel Adam Medina Alumno: Ing. Jaimes Maldonado José Luis
Diseño de controladores por el método de respuesta en frecuencia de sistemas discretos. (método gráfico) CONTROL DIGITAL 07--0 Catedrático: Dr. Manuel Adam Medina Alumno: Ing. Jaimes Maldonado José Luis
Control automático con herramientas interactivas
 1 El proyecto de fichas interactivas Objetivo del libro 2 Explicar de forma interactiva conceptos básicos de un curso de introducción al control automático y facilitar al recién llegado su aprendizaje
1 El proyecto de fichas interactivas Objetivo del libro 2 Explicar de forma interactiva conceptos básicos de un curso de introducción al control automático y facilitar al recién llegado su aprendizaje
Lugar Geométrico de las Raíces
 ELC-33103 Teoría de Control Lugar Geométrico de las Raíces Prof. Francisco M. Gonzalez-Longatt fglongatt@ieee.org http://www.giaelec.org/fglongatt/sp.htm 1. Introducción La característica básica de la
ELC-33103 Teoría de Control Lugar Geométrico de las Raíces Prof. Francisco M. Gonzalez-Longatt fglongatt@ieee.org http://www.giaelec.org/fglongatt/sp.htm 1. Introducción La característica básica de la
3. El sistema electrónico contiene el amplificador de error y
 EXAMEN DE FEBRERO DE REULACIÓN AUTOMÁTICA I (34 3UREOPD La siguiente figura representa un péndulo controlado por medio de un electroimán. Un complejo sistema electromecánico permite ejercer una fuera horizontal
EXAMEN DE FEBRERO DE REULACIÓN AUTOMÁTICA I (34 3UREOPD La siguiente figura representa un péndulo controlado por medio de un electroimán. Un complejo sistema electromecánico permite ejercer una fuera horizontal
La función de transferencia de un amplificador de tensión con entrada diferencial, en lazo abierto es:
 EJERCICIO La función de transferencia de un amplificador de tensión con entrada diferencial, en lazo abierto es: 6. A ( jf ) con f en Hz. 4 5 7 ( jf )( jf 2 )( jf 2 )( jf ). Represente el diagrama asintótico
EJERCICIO La función de transferencia de un amplificador de tensión con entrada diferencial, en lazo abierto es: 6. A ( jf ) con f en Hz. 4 5 7 ( jf )( jf 2 )( jf 2 )( jf ). Represente el diagrama asintótico
18. DOMINIO FRECUENCIA CRITERIO DE NYQUIST
 18. DOMINIO FRECUENCIA CRITERIO DE NYQUIST 18.1. DIAGRAMAS POLARES En análisis dinámico de sistemas en el dominio de la frecuencia, además de emplearse los diagramas y el criterio de Bode, se utilizan
18. DOMINIO FRECUENCIA CRITERIO DE NYQUIST 18.1. DIAGRAMAS POLARES En análisis dinámico de sistemas en el dominio de la frecuencia, además de emplearse los diagramas y el criterio de Bode, se utilizan
Planta - Figura 1 T T
 RESOLUCIÓN SEGUNDO PARCIAL Recursada 016 1) Explique cómo se halla el algoritmo de control discreto recursivo, u(k), para un controlador PID con la disposición de sus acciones como se indica en la Figura
RESOLUCIÓN SEGUNDO PARCIAL Recursada 016 1) Explique cómo se halla el algoritmo de control discreto recursivo, u(k), para un controlador PID con la disposición de sus acciones como se indica en la Figura
El método del lugar de las raíces.
 El método del lugar de las raíces. Las características de un sistema de lazo cerrado son determinadas por los polos de lazo cerrado. Los polos de lazo cerrado son las raíces de la ecuación característica.
El método del lugar de las raíces. Las características de un sistema de lazo cerrado son determinadas por los polos de lazo cerrado. Los polos de lazo cerrado son las raíces de la ecuación característica.
Teorema de Cauchy. Derivar el Teorema de Cauchy mediante la observación de varias transformaciones de contorno. Problema. o pts.
 Teorema de Cauchy Problema Derivar el Teorema de Cauchy mediante la observación de varias transformaciones de contorno. Parámetros pts o step o pts o step o pts Solución Se definen los rangos para el controno
Teorema de Cauchy Problema Derivar el Teorema de Cauchy mediante la observación de varias transformaciones de contorno. Parámetros pts o step o pts o step o pts Solución Se definen los rangos para el controno
Prefacio. 1 Sistemas de control
 INGENIERIA DE CONTROL por BOLTON Editorial Marcombo Prefacio 1 Sistemas de control Sistemas Modelos Sistemas en lazo abierto y cerrado Elementos básicos de un sistema en lazo abierto Elementos básicos
INGENIERIA DE CONTROL por BOLTON Editorial Marcombo Prefacio 1 Sistemas de control Sistemas Modelos Sistemas en lazo abierto y cerrado Elementos básicos de un sistema en lazo abierto Elementos básicos
4. Análisis de Sistemas Realimentados
 4. Análisis de Sistemas Realimentados Parte 2 Panorama: Estabilidad y respuesta en frecuencia El criterio de estabilidad de Nyquist Márgenes de estabilidad Robustez CAUT1 Clase 6 1 Estabilidad y respuesta
4. Análisis de Sistemas Realimentados Parte 2 Panorama: Estabilidad y respuesta en frecuencia El criterio de estabilidad de Nyquist Márgenes de estabilidad Robustez CAUT1 Clase 6 1 Estabilidad y respuesta
Tema 5 Estabilidad y Compensación
 CIRCUITOS ANALÓGICOS (SEGUNDO CURSO) Tema 5 Estabilidad y Compensación Sebastián López y José Fco. López Instituto Universitario de Microelectrónica Aplicada (IUMA) Universidad de Las Palmas de Gran Canaria
CIRCUITOS ANALÓGICOS (SEGUNDO CURSO) Tema 5 Estabilidad y Compensación Sebastián López y José Fco. López Instituto Universitario de Microelectrónica Aplicada (IUMA) Universidad de Las Palmas de Gran Canaria
Análisis de estabilidad y diseño de en frecuencia de sistemas realimentados
 Análisis de estabilidad y diseño de en frecuencia de sistemas realimentados Análisis de estabilidad y diseño de en frecuencia de sistemas realimentados INTRODUCCIÓN El principal inconveniente de los amplificadores
Análisis de estabilidad y diseño de en frecuencia de sistemas realimentados Análisis de estabilidad y diseño de en frecuencia de sistemas realimentados INTRODUCCIÓN El principal inconveniente de los amplificadores
Análisis de Sistemas Lineales. Sistemas Dinámicos y Control Facultad de Ingeniería Universidad Nacional de Colombia
 Análisis de Sistemas Lineales Sistemas Dinámicos y Control 2001772 Facultad de Ingeniería Universidad Nacional de Colombia Sistemas SISO (Single Input Single Output) Los sistemas de una sola entrada y
Análisis de Sistemas Lineales Sistemas Dinámicos y Control 2001772 Facultad de Ingeniería Universidad Nacional de Colombia Sistemas SISO (Single Input Single Output) Los sistemas de una sola entrada y
LABORATORIO DE SISTEMAS DE CONTROL AUTOMÁTICO PRÁCTICA N 10
 ESCUELA POLITÉCNICA NACIONAL Campus Politécnico "J. Rubén Orellana R." FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control 1. TEMA LABORATORIO DE SISTEMAS DE CONTROL
ESCUELA POLITÉCNICA NACIONAL Campus Politécnico "J. Rubén Orellana R." FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control 1. TEMA LABORATORIO DE SISTEMAS DE CONTROL
Control de sistemas lineales. Gabriela Peretti FaMAF
 Control de sistemas lineales Gabriela Peretti FaMAF Temas Estabilidad Criterio de estabilidad de Routh Análisis en el dominio temporal Errores en estado estable Especificaciones en el dominio del tiempo
Control de sistemas lineales Gabriela Peretti FaMAF Temas Estabilidad Criterio de estabilidad de Routh Análisis en el dominio temporal Errores en estado estable Especificaciones en el dominio del tiempo
Sistemas Control Embebidos e Instrumentación Electrónica UNIVERSIDAD EAFIT Semestre 2010/2 2009/2
 DIAGRAMA DE BODE Semestre 2010/2 El Diagrama de BODE se conforma por dos gráficas logarítmicas de: La magnitud de una función de transferencia senoidal: 20log G(jw) ; La unidad de medida que se usa, es
DIAGRAMA DE BODE Semestre 2010/2 El Diagrama de BODE se conforma por dos gráficas logarítmicas de: La magnitud de una función de transferencia senoidal: 20log G(jw) ; La unidad de medida que se usa, es
4.6.- CRITERIO DE ESTABILIDAD DE NYQUIST. Se puede decir que un sistema es estable cuando al ser excitado, la parte transitoria
 4.6.- CRITERIO DE ESTABILIDAD DE NYQUIST. Se puede decir que un sistema es estable cuando al ser excitado, la parte transitoria de su respuesta decae conforme aumenta el tiempo. Para esto, se necesita
4.6.- CRITERIO DE ESTABILIDAD DE NYQUIST. Se puede decir que un sistema es estable cuando al ser excitado, la parte transitoria de su respuesta decae conforme aumenta el tiempo. Para esto, se necesita
GRADO: CURSO: 3 CUATRIMESTRE:
 DENOMINACIÓN ASIGNATURA: Ingeniería de Control I GRADO: CURSO: 3 CUATRIMESTRE: La asignatura tiene 29 sesiones que se distribuyen a lo largo de 14 semanas. Los laboratorios pueden situarse en cualquiera
DENOMINACIÓN ASIGNATURA: Ingeniería de Control I GRADO: CURSO: 3 CUATRIMESTRE: La asignatura tiene 29 sesiones que se distribuyen a lo largo de 14 semanas. Los laboratorios pueden situarse en cualquiera
Determine la cantidad de polos en el semi plano izquierdo, fundamente. Determine el rango de valores de K para que el sistema sea estable.
 ESTABILIDAD 1 Un sistema con realimentación unitaria tiene la siguiente función de transferencia de la planta: ( s 1.)( s 0.5s ) Gp ( s) s.5s 1 a) Cuantos polos tiene en el semiplano derecho. b) Cuantos
ESTABILIDAD 1 Un sistema con realimentación unitaria tiene la siguiente función de transferencia de la planta: ( s 1.)( s 0.5s ) Gp ( s) s.5s 1 a) Cuantos polos tiene en el semiplano derecho. b) Cuantos
Introducción al control de fuentes conmutadas.
 Introducción al control de fuentes conmutadas. En una fuente conmutada ideal la tensión de salida es una función de la tensión de entrada y del valor del ciclo de trabajo definido. En la práctica existirán
Introducción al control de fuentes conmutadas. En una fuente conmutada ideal la tensión de salida es una función de la tensión de entrada y del valor del ciclo de trabajo definido. En la práctica existirán
Estabilidad en el dominio de la frecuencia Márgenes de estabilidad. Elizabeth Villota
 Estabilidad en el dominio de la frecuencia Márgenes de estabilidad Elizabeth Villota 1 Función de transferencia de lazo Función de transferencia de lazo: 2 Función en lazo cerrado: 2 Diagrama de Nyquist
Estabilidad en el dominio de la frecuencia Márgenes de estabilidad Elizabeth Villota 1 Función de transferencia de lazo Función de transferencia de lazo: 2 Función en lazo cerrado: 2 Diagrama de Nyquist
SISTEMAS DE CONTROL ANÁLISIS Y DISEÑO DE SISTEMAS DE CONTROL EN EL DOMINIO DE LA FRECUENCIA. Profesor: Adrián Peidró
 SISTEMAS DE CONTROL PRÁCTICAS DE SISTEMAS DE CONTROL ANÁLISIS Y DISEÑO DE SISTEMAS DE CONTROL EN EL DOMINIO DE LA FRECUENCIA Profesor: Adrián Peidró (apeidro@umh.es) OBJETIVOS Afianzar los conocimientos
SISTEMAS DE CONTROL PRÁCTICAS DE SISTEMAS DE CONTROL ANÁLISIS Y DISEÑO DE SISTEMAS DE CONTROL EN EL DOMINIO DE LA FRECUENCIA Profesor: Adrián Peidró (apeidro@umh.es) OBJETIVOS Afianzar los conocimientos
Control Automático. Compensadores de adelanto en el dominio de la frecuencia
 Control Automático Compensadores de adelanto en el dominio de la frecuencia Contenido Introducción Estrategia Ecuaciones del compensador de adelanto Cálculo de un compensador de adelanto para corrección
Control Automático Compensadores de adelanto en el dominio de la frecuencia Contenido Introducción Estrategia Ecuaciones del compensador de adelanto Cálculo de un compensador de adelanto para corrección
Tipos de Compensación
 - CONTROL DE PROCESOS (segundo cuatrimestre) - CONTROL AVANZADO y AUTOMATISMO Facultad de Ingeniería UNER Carrera: Bioingeniería Planes de estudios: 993 y 2008 Tipos de Compensación + Gc( Gp( + G ( + -
- CONTROL DE PROCESOS (segundo cuatrimestre) - CONTROL AVANZADO y AUTOMATISMO Facultad de Ingeniería UNER Carrera: Bioingeniería Planes de estudios: 993 y 2008 Tipos de Compensación + Gc( Gp( + G ( + -
REGULACIÓN AUTOMÁTICA ING. TEC. IND. ELECTRÓNICA
 REGULACIÓN AUTOMÁTICA ING. TEC. IND. ELECTRÓNICA 1 er Cuatrimestre: Martes 12:30-14:30 16:00-17:00 2º Cuatrimestre: Jueves 12:30-14:30 16:00-17:00 Profesor: Andrés S. Vázquez email: AndresS.Vazquez@uclm.es
REGULACIÓN AUTOMÁTICA ING. TEC. IND. ELECTRÓNICA 1 er Cuatrimestre: Martes 12:30-14:30 16:00-17:00 2º Cuatrimestre: Jueves 12:30-14:30 16:00-17:00 Profesor: Andrés S. Vázquez email: AndresS.Vazquez@uclm.es
ANALISIS EN FRECUENCIA
 ANALISIS EN FRECUENCIA Con el término respuesta en frecuencia, nos referimos a la respuesta de un sistema en estado estable a una entrada senoidal. En los métodos de la respuesta en frecuencia, la frecuencia
ANALISIS EN FRECUENCIA Con el término respuesta en frecuencia, nos referimos a la respuesta de un sistema en estado estable a una entrada senoidal. En los métodos de la respuesta en frecuencia, la frecuencia
Lugar Geométrico de las Raíces o Método de Evans
 Lugar Geométrico de las Raíces o Método de Evans Lugar de la Raíz El lugar de la raíz (root locus es un método gráfico de encontrar la posición de los polos de lazo cerrado de la función de transferencia:
Lugar Geométrico de las Raíces o Método de Evans Lugar de la Raíz El lugar de la raíz (root locus es un método gráfico de encontrar la posición de los polos de lazo cerrado de la función de transferencia:
Examen de Sistemas Automáticos Agosto 2016
 Examen de Sistemas Automáticos Agosto 206 Ej. Ej. 2 Ej. 3 Ej. 4 Test Total Apellidos, Nombre: Sección: Fecha: 9 de agosto de 206 Atención: el enunciado consta de cuatro ejercicios prácticos y un test de
Examen de Sistemas Automáticos Agosto 206 Ej. Ej. 2 Ej. 3 Ej. 4 Test Total Apellidos, Nombre: Sección: Fecha: 9 de agosto de 206 Atención: el enunciado consta de cuatro ejercicios prácticos y un test de
Lectura 2: Diseño de Sistemas de Control mediante la Respuesta de Frecuencia
 SISEMAS DE ONROL AUOMÁIO DAI-EPN Lectura 2: Diseño de Sistemas de ontrol mediante la Respuesta de Frecuencia Lecturas recomendadas ap., pags. 74-759, Sistemas de ontrol Automático, KUO Benjamín, Séptima
SISEMAS DE ONROL AUOMÁIO DAI-EPN Lectura 2: Diseño de Sistemas de ontrol mediante la Respuesta de Frecuencia Lecturas recomendadas ap., pags. 74-759, Sistemas de ontrol Automático, KUO Benjamín, Séptima
E.T.S.I. INDUSTRIAL DE BEJAR UNIVERSIDAD DE SALAMANCA CAPITULO
 Análisis en el dominio de la frecuencia 121 E.T.S.I. INDUSTRIAL DE BEJAR UNIVERSIDAD DE SALAMANCA CAPITULO 9 ANALISIS EN EL DOMINIO DE LA FRECUENCIA 122 Problemas de ingeniería de control RESPUESTA FRECUENCIAL
Análisis en el dominio de la frecuencia 121 E.T.S.I. INDUSTRIAL DE BEJAR UNIVERSIDAD DE SALAMANCA CAPITULO 9 ANALISIS EN EL DOMINIO DE LA FRECUENCIA 122 Problemas de ingeniería de control RESPUESTA FRECUENCIAL
Criterio de Estabilidad de Nyquist- Aplicación al análisis de la Estabilidad de Sistemas de Control continuos y LTI.
 Criterio de Estabilidad de Nyquist- Aplicación al análisis de la de Control continuos y LTI. 1. Prefacio. La experiencia de los últimos años, en relación con la comprensión del análisis de la Estabilidad
Criterio de Estabilidad de Nyquist- Aplicación al análisis de la de Control continuos y LTI. 1. Prefacio. La experiencia de los últimos años, en relación con la comprensión del análisis de la Estabilidad
Dominio de la Frecuencia. Sistemas Electrónicos de Control
 Dominio de la Frecuencia Sistemas Electrónicos de Control 10 de Abril de 2014 (SECO) Dominio de la Frecuencia 10/04/2014 1 / 69 Índice 1 Introducción 2 Representaciones Gráficas Diagrama de Bode Diagrama
Dominio de la Frecuencia Sistemas Electrónicos de Control 10 de Abril de 2014 (SECO) Dominio de la Frecuencia 10/04/2014 1 / 69 Índice 1 Introducción 2 Representaciones Gráficas Diagrama de Bode Diagrama
Problema 1 (60 minutos - 5 puntos)
") Amplitude Imaginary Axis EXAMEN DE JULIO DE REGULACIÓN AUTOMÁTICA (13/14) Problema 1 (6 minutos - 5 puntos) El control de temperatura de la planta Peltier de la asignatura es realizado mediante un sistema
Amplitude Imaginary Axis EXAMEN DE JULIO DE REGULACIÓN AUTOMÁTICA (13/14) Problema 1 (6 minutos - 5 puntos) El control de temperatura de la planta Peltier de la asignatura es realizado mediante un sistema
Departamento de Ingenierías Eléctrica y Electrónica Universidad del Norte
 christianq@uninorte.edu.co Departamento de Ingenierías Eléctrica y Electrónica Universidad del Norte FACTORES CUADRÁTICOS G( jω) 1+ 2 ζ ( jω/ ωn) + ( jω/ ωn) 1 = ω ω 1+ 2ζ j + j ωn ωn Si ζ > 1 : Factor
christianq@uninorte.edu.co Departamento de Ingenierías Eléctrica y Electrónica Universidad del Norte FACTORES CUADRÁTICOS G( jω) 1+ 2 ζ ( jω/ ωn) + ( jω/ ωn) 1 = ω ω 1+ 2ζ j + j ωn ωn Si ζ > 1 : Factor
Caso Resuelto 4 Análisis en el Dominio de la Frecuencia realizado con Excel
 Caso Resuelto 4 Para realizar un análisis completo en el dominio de la frecuencia se necesita construir las gráficas: Polar de Nyquist, Diagramas de Bode de Lazo Abierto, Diagramas de Bode de Lazo Cerrado,
Caso Resuelto 4 Para realizar un análisis completo en el dominio de la frecuencia se necesita construir las gráficas: Polar de Nyquist, Diagramas de Bode de Lazo Abierto, Diagramas de Bode de Lazo Cerrado,
Análisis de redes II
 Análisis de redes II Filtros activos (Diagramas de Bode) Universidad de Chile, 2009 Anlisis de redes II p. 1/3 En este tema veremos la respuesta en frecuencia sistemas lineales (redes elèctricas) en terminos
Análisis de redes II Filtros activos (Diagramas de Bode) Universidad de Chile, 2009 Anlisis de redes II p. 1/3 En este tema veremos la respuesta en frecuencia sistemas lineales (redes elèctricas) en terminos
FACULTAD DE INGENIERÍA
 FACULTAD DE INGENIERÍA Universidad Nacional de San Juan Carrera: BIOINGENIERÍA Programa Analítico de la Cátedra: CONTROL II Año 2015 Ing. Carlos Francisco MARTÍN Profesor Titular Mg.Ing. Ana María ECHENIQUE
FACULTAD DE INGENIERÍA Universidad Nacional de San Juan Carrera: BIOINGENIERÍA Programa Analítico de la Cátedra: CONTROL II Año 2015 Ing. Carlos Francisco MARTÍN Profesor Titular Mg.Ing. Ana María ECHENIQUE
. (4.5) 3. Obtener el módulo de G(jω): . (4.6) 4. Calcular el ángulo de fase : (4.7)
 3. Obtener el módulo de G(jω): . (4.6) 4. Calcular el ángulo de fase : (4.7)") Problemas Resueltos de Análisis de Sistemas Lineales Continuos m j A 1 i1 ( ) zi j (45) r n j ( j) 1 j1 p j 3 Obtener el módulo de (jω): ( j) Aj 1 j 1 j 1 z z z 1 2 r ( j) j 1 j 1 j 1 p p p 1 2 m n (46)
Problemas Resueltos de Análisis de Sistemas Lineales Continuos m j A 1 i1 ( ) zi j (45) r n j ( j) 1 j1 p j 3 Obtener el módulo de (jω): ( j) Aj 1 j 1 j 1 z z z 1 2 r ( j) j 1 j 1 j 1 p p p 1 2 m n (46)
ANALISIS DE SISTEMAS DINÁMICOS
 UACM SAN LORENZO TEZONCO 2014 ANALISIS DE SISTEMAS DINÁMICOS JOSE ALFREDO MARTINEZ PEREZ ANALISIS DE UN SISTEMA DINAMICO DE TERCER ORDEN 17-12-2014 ANALISIS DE UN SISTEMA DINAMICO DE TERCER ORDEN Introducción
UACM SAN LORENZO TEZONCO 2014 ANALISIS DE SISTEMAS DINÁMICOS JOSE ALFREDO MARTINEZ PEREZ ANALISIS DE UN SISTEMA DINAMICO DE TERCER ORDEN 17-12-2014 ANALISIS DE UN SISTEMA DINAMICO DE TERCER ORDEN Introducción
d (ii) 1() 1() 0 G s H s (5.18) Además, si al evaluar: 0, raíces de multiplicidad par =0, raíces de multiplicidad impar y hay cambio de signo. (5.
 1() 1() 0 G s H s (5.18) Además, si al evaluar: 0, raíces de multiplicidad par =0, raíces de multiplicidad impar y hay cambio de signo. (5.") Problemas Resueltos de Análisis de Sistemas Lineales Continuos (i) kg() s H() s d (ii) () () ds G s H s (5.8) Además, si al evaluar: d ds G () s H () s, raíces de multiplicidad par =, raíces de multiplicidad
Problemas Resueltos de Análisis de Sistemas Lineales Continuos (i) kg() s H() s d (ii) () () ds G s H s (5.8) Además, si al evaluar: d ds G () s H () s, raíces de multiplicidad par =, raíces de multiplicidad
4.- ANALISIS DE SISTEMAS EN TIEMPO CONTINUO
 ANALISIS DE SISTEMAS EN TIEMPO CONTINUO Dinámica de Sistemas 4. 4.- ANALISIS DE SISTEMAS EN TIEMPO CONTINUO 4..- Efecto de los polos en el comportamiento del sistema. 4..- Estabilidad. 4.3.- Análisis de
ANALISIS DE SISTEMAS EN TIEMPO CONTINUO Dinámica de Sistemas 4. 4.- ANALISIS DE SISTEMAS EN TIEMPO CONTINUO 4..- Efecto de los polos en el comportamiento del sistema. 4..- Estabilidad. 4.3.- Análisis de
1. Diseño de un compensador de adelanto de fase
 COMPENSADORES DE ADELANTO Y RETARDO 1 1. Diseño de un compensador de adelanto de fase El compensador de adelanto de fase persigue el aumento del margen de fase mediante la superposición de la curva de
COMPENSADORES DE ADELANTO Y RETARDO 1 1. Diseño de un compensador de adelanto de fase El compensador de adelanto de fase persigue el aumento del margen de fase mediante la superposición de la curva de
Ejercicios resueltos 4: Compensación por adelanto Cátedra de Control y Servomecanismos
 Ejercicios resueltos 4: Compensación por adelanto Cátedra de Control y Servomecanismos Idea y borrador: Ing. Cristian Zujew Corregido y ampliado por el Dr. Ing. F. Valenciaga Objetivos: en esta guía práctica
Ejercicios resueltos 4: Compensación por adelanto Cátedra de Control y Servomecanismos Idea y borrador: Ing. Cristian Zujew Corregido y ampliado por el Dr. Ing. F. Valenciaga Objetivos: en esta guía práctica
Desempeño Respuesta en frecuencia. Elizabeth Villota
 Desempeño Respuesta en frecuencia Elizabeth Villota 1 Desempeño SLIT 2do orden transiente estado estacionario respuesta a un escalón unitario ω o autovalores sistema λ(a) propiedades de la respuesta a
Desempeño Respuesta en frecuencia Elizabeth Villota 1 Desempeño SLIT 2do orden transiente estado estacionario respuesta a un escalón unitario ω o autovalores sistema λ(a) propiedades de la respuesta a
Efecto de la realimentación sobre la respuesta en frecuencia (ancho de banda y estabilidad)
") Eecto de la realimentación sobre la respuesta en recuencia (ancho de banda y estabilidad) El eecto que produce la realimentación depende de la unción de transerencia A*β. Esta unción de transerencia incluye,
Eecto de la realimentación sobre la respuesta en recuencia (ancho de banda y estabilidad) El eecto que produce la realimentación depende de la unción de transerencia A*β. Esta unción de transerencia incluye,
1. Compensación com PI
 CESÁREO RAIMÚNDEZ.. Ejemplo -. La planta. Compensación com PI G p (s) = (s + 3) 2 + 2 2 debe compensarse de modo que en lazo cerrado exhiba las características:. Error nulo en régimen permanente para entrada
CESÁREO RAIMÚNDEZ.. Ejemplo -. La planta. Compensación com PI G p (s) = (s + 3) 2 + 2 2 debe compensarse de modo que en lazo cerrado exhiba las características:. Error nulo en régimen permanente para entrada
= = Amplificador inversor. Considere el amplificador operacional de la figura Obtengamos el voltaje de salida
 Amplificadores operacionales. Los amplificadores operacionales, también conocidos como amp ops, se usan con frecuencia para amplificar las señales de los circuitos Los amp ops también se usan con frecuencia
Amplificadores operacionales. Los amplificadores operacionales, también conocidos como amp ops, se usan con frecuencia para amplificar las señales de los circuitos Los amp ops también se usan con frecuencia
Desempeño. Estado estacionario: Respuesta en el tiempo y respuesta en la frecuencia.
 Desempeño. Estado estacionario: Respuesta en el tiempo y respuesta en la frecuencia. Elizabeth Villota Cerna Curso: Ingeniería de Control (MT221) Facultad de Ingeniería Mecánica UNI-FIM 1 Desempeño SLIT
Desempeño. Estado estacionario: Respuesta en el tiempo y respuesta en la frecuencia. Elizabeth Villota Cerna Curso: Ingeniería de Control (MT221) Facultad de Ingeniería Mecánica UNI-FIM 1 Desempeño SLIT
Sistemas Lineales II. Quinto Semestre. Carrera: Ingeniería Electrónica. Instituto Tecnológico Superior. Alumno: Titular: Contenido. Introducción.
 Sistemas Lineales II. Quinto Semestre. Carrera: Ingeniería Electrónica. Instituto Tecnológico Superior Alumno: Titular: Contenido. Introducción. En la industria, como en las comunidades existen variables
Sistemas Lineales II. Quinto Semestre. Carrera: Ingeniería Electrónica. Instituto Tecnológico Superior Alumno: Titular: Contenido. Introducción. En la industria, como en las comunidades existen variables
En la figura 1 se muestran diferentes trazas polares para G ( jω ) con tres valores diferentes de ganancia K en lazo abierto.
 con tres valores diferentes de ganancia K en lazo abierto.") Maren de Ganancia y Maren de Fase En la fiura se muestran diferentes trazas polares para G ( jω ) con tres valores diferentes de anancia en lazo abierto. Fiura. Trazas polares de G ( jω ) = ( + jωta )(
Maren de Ganancia y Maren de Fase En la fiura se muestran diferentes trazas polares para G ( jω ) con tres valores diferentes de anancia en lazo abierto. Fiura. Trazas polares de G ( jω ) = ( + jωta )(
10. Diseño avanzado de controladores SISO
 10. Diseño avanzado de controladores SISO Parte 2 Panorama de la Clase: Repaso: Parametrización Afín (PA) Consideraciones de diseño: grado relativo rechazo de perturbaciones esfuerzo de control robustez
10. Diseño avanzado de controladores SISO Parte 2 Panorama de la Clase: Repaso: Parametrización Afín (PA) Consideraciones de diseño: grado relativo rechazo de perturbaciones esfuerzo de control robustez
Automá ca. Ejercicios Capítulo7.1.AnálisisFrecuencial(Parte1)
") Automáca Ejercicios Capítulo7.1.AnálisisFrecuencial(Parte1) JoséRamónLlataGarcía EstherGonzálezSarabia DámasoFernándezPérez CarlosToreFerero MaríaSandraRoblaGómez DepartamentodeTecnologíaElectrónica eingenieríadesistemasyautomáca
Automáca Ejercicios Capítulo7.1.AnálisisFrecuencial(Parte1) JoséRamónLlataGarcía EstherGonzálezSarabia DámasoFernándezPérez CarlosToreFerero MaríaSandraRoblaGómez DepartamentodeTecnologíaElectrónica eingenieríadesistemasyautomáca
FACULTAD DE INGENIERIA UBA SISTEMAS DE CONTROL MECANICA. Criterio de Estabilidad de Nyquist.
 FACULTAD DE INENIERIA UBA ITEMA DE CONTROL 67 22 MECANICA Criterio de Estabilidad de Nyquist. Antes de presentar el criterio de estabilidad de Nyquist, vamos a definir el diagrama polar. El diagrama de
FACULTAD DE INENIERIA UBA ITEMA DE CONTROL 67 22 MECANICA Criterio de Estabilidad de Nyquist. Antes de presentar el criterio de estabilidad de Nyquist, vamos a definir el diagrama polar. El diagrama de
Control PID Sintonización Elizabeth Villota
 Control PID Sintonización Elizabeth Villota Control PID Control PID una de las formas más comunes de usar realimentación en los sistemas de ingeniería. Control PID se encuentra presente en dispositivos
Control PID Sintonización Elizabeth Villota Control PID Control PID una de las formas más comunes de usar realimentación en los sistemas de ingeniería. Control PID se encuentra presente en dispositivos
Respuesta en frecuencia. Elizabeth Villota
 Elizabeth Villota 1 Desempeño en el dominio de la frecuencia SLIT 2do orden (masa-resorte-amortiguador) Forma espacio de estados Forma función de transferencia respuesta a un escalón diagramas de Bode
Elizabeth Villota 1 Desempeño en el dominio de la frecuencia SLIT 2do orden (masa-resorte-amortiguador) Forma espacio de estados Forma función de transferencia respuesta a un escalón diagramas de Bode
Dominio de la Frecuencia
 Dominio de la Frecuencia Sistemas Electrónicos de Control Álvaro Gutiérrez 18 de abril de 2018 aguti@etsit.upm.es www.robolabo.etsit.upm.es Índice 1 Introducción 2 Representaciones Gráficas Diagrama de
Dominio de la Frecuencia Sistemas Electrónicos de Control Álvaro Gutiérrez 18 de abril de 2018 aguti@etsit.upm.es www.robolabo.etsit.upm.es Índice 1 Introducción 2 Representaciones Gráficas Diagrama de
G(s) I. RESPUESTA FRECUENCIAL PS-2320 CONTROL DE PROCESOS II. y(t) x(t) y(t) = Y sen(ωt + φ) x(t) = X sen(ωt) PROF. JENNY MONTBRUN DI FILIPPO
 I. RESPUESTA FRECUENCIAL PS-2320 CONTROL DE PROCESOS II. y(t) x(t) y(t) = Y sen(ωt + φ) x(t) = X sen(ωt) PROF. JENNY MONTBRUN DI FILIPPO") I. RESPUESTA FRECUENCIAL PS-30 CONTROL DE PROCESOS II I. RESPUESTA FRECUENCIAL La respuesta en frecuencia de un sistema se define como la respuesta del sistema, en estado estacionario, ante una entrada
I. RESPUESTA FRECUENCIAL PS-30 CONTROL DE PROCESOS II I. RESPUESTA FRECUENCIAL La respuesta en frecuencia de un sistema se define como la respuesta del sistema, en estado estacionario, ante una entrada
Estabilidad en sistemas realimentados
 Estabilidad en sistemas realimentados Esquema general de un sistema realimentado a(s) f Y X a 1 af s s La transferencia tiende a infinito a una frecuencia ω 1 tal que: af j 1 1 af = ganancia de lazo =
Estabilidad en sistemas realimentados Esquema general de un sistema realimentado a(s) f Y X a 1 af s s La transferencia tiende a infinito a una frecuencia ω 1 tal que: af j 1 1 af = ganancia de lazo =
Diseño de Redes de Adelanto y Atraso de fase Sistemas Automáticos
 Diseño de Redes de Adelanto y Atraso de fase Sistemas Automáticos 17 de mayo de 24 Índice General 1 Enunciado 2 2 Primer juego de especificaciones 3 2.1 Especificaciones.......................... 3 2.2
Diseño de Redes de Adelanto y Atraso de fase Sistemas Automáticos 17 de mayo de 24 Índice General 1 Enunciado 2 2 Primer juego de especificaciones 3 2.1 Especificaciones.......................... 3 2.2
Diseño mediante Redes de Adelanto y Atraso de Fase
 Diseño mediante Redes de Adelanto y Atraso de Fase Sistemas Automáticos 2 de mayo de 24 Enunciado: Un proceso industrial dado tiene la siguiente función de transferencia: G(s) = 2 (s + 1)(s + 2)(s + 5)
Diseño mediante Redes de Adelanto y Atraso de Fase Sistemas Automáticos 2 de mayo de 24 Enunciado: Un proceso industrial dado tiene la siguiente función de transferencia: G(s) = 2 (s + 1)(s + 2)(s + 5)
Ejercicios de examen: frecuencial
 EJERCICIO 1 Los diagramas mostrados en la hoja adjunta representan respectivamente el modelo de un sistema que se pretende controlar y el correspondiente a dicho sistema con el regulador. Se pide: a) Qué
EJERCICIO 1 Los diagramas mostrados en la hoja adjunta representan respectivamente el modelo de un sistema que se pretende controlar y el correspondiente a dicho sistema con el regulador. Se pide: a) Qué
Departamento de Ingeniería Eléctrica y Electrónica. Guía de Prácticas de Laboratorio. Materia: Control I. Laboratorio de Ingeniería Electrónica
 Instituto Tecnológico de Querétaro Departamento de Ingeniería Eléctrica y Electrónica Guía de Prácticas de Laboratorio Materia: Control I Laboratorio de Ingeniería Electrónica Santiago de Querétaro, Qro.
Instituto Tecnológico de Querétaro Departamento de Ingeniería Eléctrica y Electrónica Guía de Prácticas de Laboratorio Materia: Control I Laboratorio de Ingeniería Electrónica Santiago de Querétaro, Qro.
ESTUDIO DE LA ESTABILIDAD EN EL DOMINIO FRECUENCIAL
 ESTUDIO DE LA ESTABILIDAD EN EL DOMINIO FRECUENCIAL 1.-Introducción. 2.-Criterio de estabilidad de Nyquist. 3.-Estabilidad relativa. 3.1.-Margen de ganancia. 3.2.-Margen de fase. 4.-Estabilidad mediante
ESTUDIO DE LA ESTABILIDAD EN EL DOMINIO FRECUENCIAL 1.-Introducción. 2.-Criterio de estabilidad de Nyquist. 3.-Estabilidad relativa. 3.1.-Margen de ganancia. 3.2.-Margen de fase. 4.-Estabilidad mediante
Nombre: Carné Ordinal. Parte I preguntas (1 punto c/u) Escriba la respuesta en el espacio indicado o encierre en un círculo la respuesta correcta:
 Escriba la respuesta en el espacio indicado o encierre en un círculo la respuesta correcta:") INSTITUTO TECNOLÓGICO DE COSTA RICA II SEMESTRE 2013 ESCUELA DE INGENIERIA EN ELECTRÓNICA CURSO: EL-5408 CONTROL AUTOMÁTICO MEDIO: Examen 3 PROF: ING. EDUARDO INTERIANO Nombre: Carné Ordinal Parte I preguntas
INSTITUTO TECNOLÓGICO DE COSTA RICA II SEMESTRE 2013 ESCUELA DE INGENIERIA EN ELECTRÓNICA CURSO: EL-5408 CONTROL AUTOMÁTICO MEDIO: Examen 3 PROF: ING. EDUARDO INTERIANO Nombre: Carné Ordinal Parte I preguntas
Análisis de la Estabilidad de un Sistema Realimentado Se trata de analizar la estabilidad del sistema realimentado neativamente, M(, a partir de la re
 Tema 7 Análisis Frecuencial de los Sistemas Realimentados Gijón - Junio 5 1 Indice 7.1. Análisis de la estabilidad de un sistemas realimentado 7.. Maren de ase y de anancia 7..1. Diarama de Bode 7... Diarama
Tema 7 Análisis Frecuencial de los Sistemas Realimentados Gijón - Junio 5 1 Indice 7.1. Análisis de la estabilidad de un sistemas realimentado 7.. Maren de ase y de anancia 7..1. Diarama de Bode 7... Diarama
Objetivo: Diseñar simular y probar un filtro pasa bajas tipo butterworth
 Laboratorio Nº4: Filtros activos, el filtro pasa bajas Objetivo: Diseñar simular y probar un filtro pasa bajas tipo butterworth Introducción: Un filtro se puede definir como una red utilizada para separar
Laboratorio Nº4: Filtros activos, el filtro pasa bajas Objetivo: Diseñar simular y probar un filtro pasa bajas tipo butterworth Introducción: Un filtro se puede definir como una red utilizada para separar
DESCRIPCIÓN DEL PRINCIPIO BÁSICO
 TEMA 4. MÉTODO DE LOCALIZACIÓN DE LAS RAÍCES CONTENIDO DESCRIPCIÓN DEL PRINCIPIO BÁSICO LOCALIZACIÓN DE LAS RAÍCES REGLAS PARA DIBUJAR LA LOCALIZACIÓN DE LAS RAÍCES DE EVANS CONSTRUCCIÓN TÍPICA DE ADELANTO
TEMA 4. MÉTODO DE LOCALIZACIÓN DE LAS RAÍCES CONTENIDO DESCRIPCIÓN DEL PRINCIPIO BÁSICO LOCALIZACIÓN DE LAS RAÍCES REGLAS PARA DIBUJAR LA LOCALIZACIÓN DE LAS RAÍCES DE EVANS CONSTRUCCIÓN TÍPICA DE ADELANTO
Control Automático Introducción
 Control Automático Introducción Contenido Qué es control automático? Tareas y objetivos del control automático Estructuras de los circuitos de regulación Tipos de regulación Efecto de las perturbaciones
Control Automático Introducción Contenido Qué es control automático? Tareas y objetivos del control automático Estructuras de los circuitos de regulación Tipos de regulación Efecto de las perturbaciones
Serie 10 ESTABILIDAD
 Serie 0 ESTABILIDAD Condición de estabilidad U u Gu U R r + + - Gc Gv Gp C G V G P + c C H G( G (. G (. G (. H ( C V P + G( 0 G( G φ 80 Localización de las raíces Plano s E S T A B L E I N E S T A B L
Serie 0 ESTABILIDAD Condición de estabilidad U u Gu U R r + + - Gc Gv Gp C G V G P + c C H G( G (. G (. G (. H ( C V P + G( 0 G( G φ 80 Localización de las raíces Plano s E S T A B L E I N E S T A B L
Análisis Dinámico de Sistemas 2 o Ingeniería de Telecomunicación. Criterio de Routh. Área de Ingeniería de Sistemas y Automática
 Análisis Dinámico de Sistemas 2 o Ingeniería de Telecomunicación Criterio de Routh Área de Ingeniería de Sistemas y Automática Universidad de Oviedo Área de Ingeniería de Sistemas y Automática. Universidad
Análisis Dinámico de Sistemas 2 o Ingeniería de Telecomunicación Criterio de Routh Área de Ingeniería de Sistemas y Automática Universidad de Oviedo Área de Ingeniería de Sistemas y Automática. Universidad
Sistemas de Control. UNIVERSIDAD NACIONAL DE INGENIERIA Facultad de Electrotecnia y Computación. Docente: Alejandro A Méndez T
 UNIVERSIDAD NACIONAL DE INGENIERIA Facultad de Electrotecnia y Computación Docente: Alejandro T 2009 Prof. Titular FEC - UNI Sistemas de Control Asistente: Yamil O Jiménez L Programa PIED VRAC - UNI Diseño
UNIVERSIDAD NACIONAL DE INGENIERIA Facultad de Electrotecnia y Computación Docente: Alejandro T 2009 Prof. Titular FEC - UNI Sistemas de Control Asistente: Yamil O Jiménez L Programa PIED VRAC - UNI Diseño
Control PID. Sintonización e implementación
 Control PID. Sintonización e implementación Elizabeth Villota Cerna Curso: Ingeniería de Control (MT221) Facultad de Ingeniería Mecánica UNI-FIM Julio 2012 1 Control PID Control PID una de las formas más
Control PID. Sintonización e implementación Elizabeth Villota Cerna Curso: Ingeniería de Control (MT221) Facultad de Ingeniería Mecánica UNI-FIM Julio 2012 1 Control PID Control PID una de las formas más
Tema 5. Análisis de la Respuesta Frecuencial de Sistemas LTI. Automática. 2º Curso del Grado en Ingeniería en Tecnología Industrial
 Tema 5. Análisis de la Respuesta Frecuencial de Sistemas LTI Automática 2º Curso del Grado en Ingeniería en Tecnología Industrial Contenido TEMA 5.- Análisis de respuesta en frecuencia 5.1. Análisis de
Tema 5. Análisis de la Respuesta Frecuencial de Sistemas LTI Automática 2º Curso del Grado en Ingeniería en Tecnología Industrial Contenido TEMA 5.- Análisis de respuesta en frecuencia 5.1. Análisis de
Control II Diseño de Compensadores utilizando el Lugar de las Raíces. Fernando di Sciascio
 Control II -2017 Diseño de Compensadores utilizando el Lugar de las Raíces Fernando di Sciascio La estabilidad y la respuesta transitoria no es la adecuada. Por qué compensar? La estabilidad y la respuesta
Control II -2017 Diseño de Compensadores utilizando el Lugar de las Raíces Fernando di Sciascio La estabilidad y la respuesta transitoria no es la adecuada. Por qué compensar? La estabilidad y la respuesta
PROBLEMAS DE ANALISIS FRECUENCIAL
 PROBLEMAS DE ANALISIS FRECUENCIAL PROBLEMA Dado un sistema cuya función de transferencia en B.A. es: G( s) = ss ( + 05, s+ ) a) Dibujar el diagrama polar indicando el M f y calcular el M g b) Es estable
PROBLEMAS DE ANALISIS FRECUENCIAL PROBLEMA Dado un sistema cuya función de transferencia en B.A. es: G( s) = ss ( + 05, s+ ) a) Dibujar el diagrama polar indicando el M f y calcular el M g b) Es estable
Ejercicios resueltos 2: Horno de Carbón Cátedra de Control y Servomecanismos
 Ejercicios resueltos : Horno de Carbón Cátedra de Control y Servomecanismos Idea y desarrollo: Ing. Cristian Zujew Corregido por el Dr. Ing. Cristian Kunusch Objetivo: en esta guía práctica se presenta
Ejercicios resueltos : Horno de Carbón Cátedra de Control y Servomecanismos Idea y desarrollo: Ing. Cristian Zujew Corregido por el Dr. Ing. Cristian Kunusch Objetivo: en esta guía práctica se presenta
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM RESPUESTA EN EL TIEMPO
 RESPUESTA EN EL TIEMPO BUENO, YA TENGO UN MODELO MATEMÁTICO. Y AHORA QUÉ? Vamos a analizar el comportamiento del sistema. ENTRADA PLANTA SALIDA NO SE COMO VA A SER. NO LO PUEDO PREDECIR. NO LA PUEDO DESCRIBIR
RESPUESTA EN EL TIEMPO BUENO, YA TENGO UN MODELO MATEMÁTICO. Y AHORA QUÉ? Vamos a analizar el comportamiento del sistema. ENTRADA PLANTA SALIDA NO SE COMO VA A SER. NO LO PUEDO PREDECIR. NO LA PUEDO DESCRIBIR
HORARIO DE CLASES SEGUNDO SEMESTRE
 HORARIO DE CLASES LUNES MIERCOLES 17 a 18:15 hs 17 a 18:15 hs Ln 14/08/17: CRONOGRAMA DE CLASES y PARCIALES CONTROL I -AÑO 2017- SEGUNDO SEMESTRE Introducción a los sistemas de Control. Definiciones de
HORARIO DE CLASES LUNES MIERCOLES 17 a 18:15 hs 17 a 18:15 hs Ln 14/08/17: CRONOGRAMA DE CLASES y PARCIALES CONTROL I -AÑO 2017- SEGUNDO SEMESTRE Introducción a los sistemas de Control. Definiciones de