Estudio comparativo de dos modelos de visión estereoscópica humana: el de Kim y Aggarwal frente al PMF de Pollard, Mayhew y Frisby
|
|
|
- Manuel Macías Piñeiro
- hace 6 años
- Vistas:
Transcripción
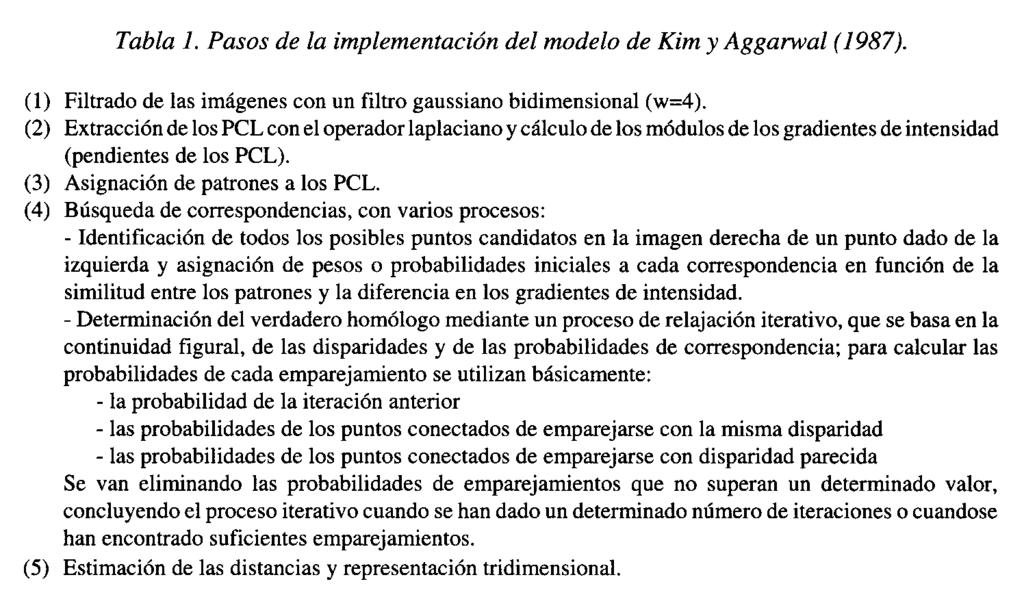
1 Estudio comparativo de dos modelos de visión estereoscópica humana: el de Kim y Aggarwal frente al PMF de Pollard, Mayhew y Frisby Pilar Rubio de Lemus y Ramón Pérez Muñoz La visión en estéreo es un método importante para estimar la información sobre la profundidad de una escena, y consiste en calcular la distancia que existe entre los cambios de intensidad luminosa de las imágenes y las cámaras. Esto se consigue partiendo de la información inicial de un par de imágenes captadas por dos cámaras cuyos ejes focales son aproximadamente paralelos y utilizando programas de ordenador que simulan la visión. El problema más importante a resolver en estos sistemas es el de encontrar el conjunto de rasgos de una imagen que se correspondan con los de la otra; este es el denominado problema de la correspondencia. En este estudio vamos a comparar el rendimiento de dos algoritmos de estereopsis basados en el sistema visual humano, los cuales utilizan los puntos de cambio de luminancia de las imágenes filtradas o puntos de borde (zero-crossings) como rasgos a poner en correspondencia. Se trata del modelo de Kim y Aggarwal de 1987 y del algoritmo PMF de Pollard, Mayhew y Frisby de Coincidencias de ambos modelos y pasos de de sus implementaciones Son métodos pasivos de estereopsis que emplean la luz natural para su solución; están basados en aspectos psicológicos y fisiológicos del sistema visual humano; utilizan restricciones del mundo físico que orientan adecuadamente el funcionamiento del proceso (en el modelo de Kim y Aggarwal: continuidad figural, continuidad de las disparidades, continuidad de las probabilidades de correspondencia e implícitamente utilizan también las restricciones de epipolaridad y unicidad; en el PMF: el límite del gradiente de disparidad, restricción de epipolaridad y restricción de unicidad); utilizan los puntos de cambio de luminancia (PCL) como primitivas de las imágenes a poner en correspondencia; realizan el mismo pretratamiento de las imágenes (filtrado de las imágenes y extracción de primitivas con el laplaciano de la gaussiana), y por último, utilizan un proceso de relajación iterativo para determinar el verdadero homólogo. A continuación se detallan los pasos de la implementación del modelo de Kim y Aggarwal (tabla 1) y los del PMF (tabla 2).

2
3 Resultados comparativos El estudio comparativo entre el modelo de Kim y Aggarwal y el PMF se ha llevado a cabo con el propósito de medir de una forma global el rendimiento de cada algoritmo. Para conocer este rendimiento hemos tenido en cuenta los tiempos de procesamiento de cada par de imágenes en estéreo, el número de emparejamientos obtenidos y el análisis de la calidad de estas correspondencias (su corrección). Hemos probado los dos algoritmos con tres pares de imágenes naturales en estéreo: el par estéreo 1 consiste en dos prismas, uno es un prisma cuadrado rectangular dispuesto verticalmente y el otro es un prisma octogonal situado transversalmente en el suelo; el par estéreo 2 consiste en un cilindro sobre un prisma cuadrado rectangular situado de forma vertical y un pequeño trozo de papel cuadrado sobre el suelo de la escena; finalmente, el par estéreo 3 consiste en una tetera china. La implementación de ambos modelos se ha hecho sobre un PC-XT trabajando a 10 Mhz. y equipado con coprocesador matemático. El lenguaje de programación empleado ha sido el TURBO-PASCAL. En cuanto al tipo de programación, la norma ha sido el tratar de modularizar al máximo, desarrollando cada función en un sólo módulo o rutina, y se ha intentado que la implementación de los dos algoritmos sea lo más parecida posible, utilizando las mismas estructuras de datos y de procesos Tiempo de Procesamiento Dado el tipo de máquina empleada, los tiempos obtenidos sólo nos sirven de referencia para establecer cuál de los dos algoritmos es más rápido y qué fases se podrían mejorar. Tal como se ve en la tabla 3, para este análisis se han dividido los algoritmos en dos fases, correspondientes en el caso de Kim y Aggarwal, al cálculo de las probabilidades iniciales y al proceso de relajación, y en el caso del PMF, correspondientes a la creación de las listas de candidatos y al proceso de búsqueda del mejor candidato. El examen de los resultados confirma dos previsiones iniciales. La primera de ellas, era que en el primer paso sería más lento el PMF, dado que la construcción de la lista de candidatos, implementada con asignaciones dinámicas de memoria, requiere más tiempo de proceso que el cálculo inicial de probabilidades soportado por el coprocesador matemático. Y la segunda, y más importante, era que globalmente, el modelo de Kim y Aggarwal sería más lento, dada la complejidad del proceso de relajación y el número de iteraciones necesarias para encontrar la
4 solución. Este punto es quizás el más reseñable, dado que los tiempos se obtuvieron realizando 10 iteraciones, límite impuesto ya que hasta el momento es el que garantiza completar mejor el proceso de correspondencias. No obstante, una línea de investigación futura consiste en estudiar cuál es el número de iteraciones necesarias y, en función de qué factores se puede hallar este número Número y Bondad de los Emparejamientos Hemos considerado los siguientes tipos de emparejamientos: * puntos emparejados: - puntos emparejados correctamente (EMPAREJAMIENTOS CORRECTOS) - puntos emparejados incorrectamente (EMPAR. FALSOS) * puntos no emparejados: - puntos no emparejados correctamente (NO EMPAR. CORRECTOS) - puntos no emparejados incorrectamente (NO EMPAR. FALSOS) El análisis de la tabla 4 nos muestra que el modelo de Kim y Aggarwal tiende a producir más emparejamientos que el PMF, lo cual a su vez provoca que los resultados muestren más correspondencias correctas y falsas, sobre todo en el procesamiento de las figuras más complejas. Estos comportamientos son fácilmente comprensibles si atendemos a la estructura de los procesos de relajación de ambos algoritmos. En el PMF, el límite del gradiente de disparidad, sobre el que se basa el modelo, restringe el número de emparejamientos posibles. Además, la propia mecánica evita que los errores se propaguen. En cambio, en el algoritmo de Kim y Aggarrwal, el proceso se inicia con un número de posibles emparejamientos muy alto, lo que en determinadas zonas de las imágenes permite el emparejamiento de puntos que en el PMF no entran ni en las consideraciones iniciales. Luego, el proceso de relajación, basado fundamentalmente en la consideración de las probabilidades de emparejamiento de las proximidades de un punto, provoca en ocasiones la propagación de los errores, o el emparejamiento de puntos con probabilidades iniciales muy bajas. No obstante, esta característica del modelo de Kim y Aggarwal hace que su rendimiento sea en general más alto sobre todo en figuras más complicadas. En estos casos, el PMF saca poco partido a las disparidades calculadas, de forma que en puntos con muchos candidatos la dificultad de selección se mantiene durante todo el proceso. En cambio,
5 en el proceso de relajación de Kim y Aggarwal, los emparejamientos calculados ayudan activamente durante todas las iteraciones al resto de correspondencias por calcular, diferencia que se nota mucho más en figuras con muchos puntos y candidatos. Para terminar, la utilización de los patrones como medida de similitud y el proceso de relajación del modelo de Kim y Aggarwal, representan mecanismos que favorecen una conecta solución del proceso de búsqueda de correspondencias. No obstante, habría que mejorar el trabajo con los patrones y sobre la eficiencia del algoritmo. El punto más fuerte del PMF es la restricción del límite del gradiente de disparidad. Referencias KIM, Y.C. y AGGARWAL, J.K. (1987). Positioning three-dimensional objects using stereo i mages. IEEE Journal of Robotics and Automation, RA-3, No. 4, POLLARD, S.B., MAYHEW, J.E.W. y FRISBY, J.P. (1985) PMF: A stereo correspondence algorithm using a disparity gradient limit. Perception, 14, RUBIO DE LEMUS, P., RUIZ GALLEGO-LARGO, T. y PEREZ MUÑOZ, R. (1990). A comparative study between Marr & Poggio's model and the PMF stereo algorithm. Abstracts de la 13th European Conference on Visual Perception, Paris, 362.
ESTIMACIÓN N DE LA DISTANCIA RECORRIDA POR UN ROBOT MÓVIL M MEDIANTE LA UTILIZACIÓN N DE DESCRIPTORES SURF
 ESTIMACIÓN N DE LA DISTANCIA RECORRIDA POR UN ROBOT MÓVIL M MEDIANTE LA UTILIZACIÓN N DE DESCRIPTORES SURF Autor: Juan Manuel Peraza Domínguez Tutor: Dr. Luis Moreno Lorente Noviembre de 2009 1 ÍNDICE
ESTIMACIÓN N DE LA DISTANCIA RECORRIDA POR UN ROBOT MÓVIL M MEDIANTE LA UTILIZACIÓN N DE DESCRIPTORES SURF Autor: Juan Manuel Peraza Domínguez Tutor: Dr. Luis Moreno Lorente Noviembre de 2009 1 ÍNDICE
= v. = v. Restricciones geométricas. Restricciones geométricas. Restricciones geométricas. Restricciones de consistencia. m 1 m 2.
 Índice Introducción Qué es la visión estereoscópica? Geometría de un sistema binocular Geometría de la proyección Geometría binocular. Matriz fundamental Rectificación 9 Restricciones Métodos de correspondencia
Índice Introducción Qué es la visión estereoscópica? Geometría de un sistema binocular Geometría de la proyección Geometría binocular. Matriz fundamental Rectificación 9 Restricciones Métodos de correspondencia
Inteligencia Artificial
 Algoritmos genéticos Bases En la naturaleza todos los seres vivos se enfrentan a problemas que deben resolver con éxito, como conseguir más luz solar o conseguir comida. La Computación Evolutiva interpreta
Algoritmos genéticos Bases En la naturaleza todos los seres vivos se enfrentan a problemas que deben resolver con éxito, como conseguir más luz solar o conseguir comida. La Computación Evolutiva interpreta
ESTIMACIÓN DE TIEMPO Y COSTO DE PRODUCTOS SOFTWARE
 Análisis y costo de algoritmos Algoritmos Un algoritmo es un conjunto de pasos claramente definidos que a partir de un cierta entrada (input) produce una determinada salida (output) Algoritmos y programas
Análisis y costo de algoritmos Algoritmos Un algoritmo es un conjunto de pasos claramente definidos que a partir de un cierta entrada (input) produce una determinada salida (output) Algoritmos y programas
1. Análisis Teórico. 1.1. Microscopio Óptico. 1.2. Teoría de Formación de Imágenes de Abbe. Resolución. Laboratorio de Ondas y Óptica.
 Laboratorio de Ondas y Óptica Práctica N 7 Microscopía Óptica Digital Departamento de Física, FaCyT. Universidad de Carabobo, Venezuela. Objetivos Estudiar el funcionamiento de un Microscopio Óptico Preparación
Laboratorio de Ondas y Óptica Práctica N 7 Microscopía Óptica Digital Departamento de Física, FaCyT. Universidad de Carabobo, Venezuela. Objetivos Estudiar el funcionamiento de un Microscopio Óptico Preparación
EI MT1008 Programación II
 GRADO EN INGENIERÍA INFORMÁTICA GRADO EN MATEMÁTICA COMPUTACIONAL EI1008 - MT1008 Programación II Curso 2010-2011 Departamento de Lenguajes y Sistemas Informáticos 1. Datos de la asignatura Carácter: Formación
GRADO EN INGENIERÍA INFORMÁTICA GRADO EN MATEMÁTICA COMPUTACIONAL EI1008 - MT1008 Programación II Curso 2010-2011 Departamento de Lenguajes y Sistemas Informáticos 1. Datos de la asignatura Carácter: Formación
TEMA 1: Algoritmos y programas
 TEMA 1: Algoritmos y programas 1.1.-Introducción La razón principal para utilizar un ordenador es para resolver problemas (en el sentido más general de la palabra), o en otras palabras, procesar información
TEMA 1: Algoritmos y programas 1.1.-Introducción La razón principal para utilizar un ordenador es para resolver problemas (en el sentido más general de la palabra), o en otras palabras, procesar información
ALGORITMOS DIGITALES II. Ing. Hugo Fdo. Velasco Peña Universidad Nacional 2006
 ALGORITMOS DIGITALES II Ing. Hugo Fdo. Velasco Peña Universidad Nacional 2006 OBJETIVOS Conocer los principios básicos de los algoritmos. Establecer paralelos entre los algoritmos, los programas y las
ALGORITMOS DIGITALES II Ing. Hugo Fdo. Velasco Peña Universidad Nacional 2006 OBJETIVOS Conocer los principios básicos de los algoritmos. Establecer paralelos entre los algoritmos, los programas y las
Apuntes de Tipos Abstractos de Datos. Juan M. Molina Bravo
 Apuntes de Tipos Abstractos de Datos Juan M. Molina Bravo curso 2001-2002 0-2 Capítulo 1 Introducción a la Programación Basada en Tipos Abstractos de Datos. 1.1 Diseño basado en ttaadd Los sistemas de
Apuntes de Tipos Abstractos de Datos Juan M. Molina Bravo curso 2001-2002 0-2 Capítulo 1 Introducción a la Programación Basada en Tipos Abstractos de Datos. 1.1 Diseño basado en ttaadd Los sistemas de
Frontera de posibilidades de producción y coste de oportunidad PROBLEMA 1
 Frontera de posibilidades de producción y coste de oportunidad PROBLEMA 1 ENUNCIADO La economía de un país produce únicamente dos bienes, cereal y vid, y tiene todos sus recursos plena y eficientemente
Frontera de posibilidades de producción y coste de oportunidad PROBLEMA 1 ENUNCIADO La economía de un país produce únicamente dos bienes, cereal y vid, y tiene todos sus recursos plena y eficientemente
I.- DATOS DE IDENTIFICACIÓN Nombre de la asignatura Métodos Numéricos (465)
") UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN FACULTAD DE INGENIERÍA CIVIL SECRETARÍA ACADÉMICA Coordinación de Investigación, Innovación, Evaluación y Documentación Educativas. I.- DATOS DE IDENTIFICACIÓN Nombre
UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN FACULTAD DE INGENIERÍA CIVIL SECRETARÍA ACADÉMICA Coordinación de Investigación, Innovación, Evaluación y Documentación Educativas. I.- DATOS DE IDENTIFICACIÓN Nombre
Programación de Ordenadores
 Programación de Ordenadores Ingeniería Química David Pelta Depto de Ciencias de la Computación e I.A. Universidad de Granada Índice Resolución de Problemas con Ordenadores Algoritmo Metodología de la programación
Programación de Ordenadores Ingeniería Química David Pelta Depto de Ciencias de la Computación e I.A. Universidad de Granada Índice Resolución de Problemas con Ordenadores Algoritmo Metodología de la programación
UNIVERSIDAD MAYOR DE SAN SIMON FACULTAD DE CIENCIAS Y TECNOLOGÍA PLAN GLOBAL COMPUTACION I
 UNIVERSIDAD MAYOR DE SAN SIMON FACULTAD DE CIENCIAS Y TECNOLOGÍA PLAN GLOBAL COMPUTACION I I. DATOS DE IDENTIFICACIÓN Nombre de la materia: Computación I Código: 2010008 Grupo: 2 Carga horaria: 4 Docencia
UNIVERSIDAD MAYOR DE SAN SIMON FACULTAD DE CIENCIAS Y TECNOLOGÍA PLAN GLOBAL COMPUTACION I I. DATOS DE IDENTIFICACIÓN Nombre de la materia: Computación I Código: 2010008 Grupo: 2 Carga horaria: 4 Docencia
BLOQUE I: GEOMETRÍA PLANA Y FIGURAS GEOMÉTRICAS. Ecuaciones y sistemas. 2 (20 horas) Funciones y gráficas. 2 (20 horas) Estadística y probabilidad
 Funciones y gráficas. 2 (20 horas) Estadística y probabilidad") PROGRAMACIÓN DIDÁCTICA Materia IV Período FBPI Tramo II Ámbito Científico-Tecnológico Bloque I Geometría plana y figuras geométricas Créditos 3 (30 horas) Bloque II Créditos Ecuaciones y sistemas 2 (20
PROGRAMACIÓN DIDÁCTICA Materia IV Período FBPI Tramo II Ámbito Científico-Tecnológico Bloque I Geometría plana y figuras geométricas Créditos 3 (30 horas) Bloque II Créditos Ecuaciones y sistemas 2 (20
Diseño y simulación de un algoritmo basado en lógica difusa para el despacho de ascensores en un edificio
 Diseño y simulación de un algoritmo basado en lógica difusa para el despacho de ascensores en un edificio PROYECTO FIN DE CARRERA Ingeniería de Telecomunicación Autor: Guillermo Iglesias García Director:
Diseño y simulación de un algoritmo basado en lógica difusa para el despacho de ascensores en un edificio PROYECTO FIN DE CARRERA Ingeniería de Telecomunicación Autor: Guillermo Iglesias García Director:
Algoritmos. Medios de expresión de un algoritmo. Diagrama de flujo
 Algoritmos En general, no hay una definición formal de algoritmo. Muchos autores los señalan como listas de instrucciones para resolver un problema abstracto, es decir, que un número finito de pasos convierten
Algoritmos En general, no hay una definición formal de algoritmo. Muchos autores los señalan como listas de instrucciones para resolver un problema abstracto, es decir, que un número finito de pasos convierten
CAPITULO 8: CONCLUSIONES
 CAPITULO 8: CONCLUSIONES El objetivo primordial de este estudio ha sido valorar la posibilidad de utilizar una nariz electrónica para monitorizar el proceso de maduración de diferentes variedades de fruta.
CAPITULO 8: CONCLUSIONES El objetivo primordial de este estudio ha sido valorar la posibilidad de utilizar una nariz electrónica para monitorizar el proceso de maduración de diferentes variedades de fruta.
La eficiencia de los programas
 La eficiencia de los programas Jordi Linares Pellicer EPSA-DSIC Índice General 1 Introducción... 2 2 El coste temporal y espacial de los programas... 2 2.1 El coste temporal medido en función de tiempos
La eficiencia de los programas Jordi Linares Pellicer EPSA-DSIC Índice General 1 Introducción... 2 2 El coste temporal y espacial de los programas... 2 2.1 El coste temporal medido en función de tiempos
Breve introducción a la Investigación de Operaciones
 Breve introducción a la Investigación de Operaciones Un poco de Historia Se inicia desde la revolución industrial, usualmente se dice que fue a partir de la segunda Guerra Mundial. La investigación de
Breve introducción a la Investigación de Operaciones Un poco de Historia Se inicia desde la revolución industrial, usualmente se dice que fue a partir de la segunda Guerra Mundial. La investigación de
1. Introducción: eficiencia técnica y eficiencia económica. 2. El análisis coste-beneficio (ACB) 4. El análisis coste-eficacia (ACE)
 4. El análisis coste-eficacia (ACE)") 1. Introducción: eficiencia técnica y eficiencia económica 2. El análisis coste-beneficio (ACB) 3. La lógica del ACB 4. El análisis coste-eficacia (ACE) 5. El análisis de frontera y el modelo DEA 1. Introducción:
1. Introducción: eficiencia técnica y eficiencia económica 2. El análisis coste-beneficio (ACB) 3. La lógica del ACB 4. El análisis coste-eficacia (ACE) 5. El análisis de frontera y el modelo DEA 1. Introducción:
3. ANÁLISIS DE SEÑALES
 3. ANÁLISIS DE SEÑALES 3.1 REGISTRO Y TRATAMIENTO DE SEÑALES Una señal se define como la historia de los valores de aceleración que mide un acelerómetro en determinado tiempo para un punto específico.
3. ANÁLISIS DE SEÑALES 3.1 REGISTRO Y TRATAMIENTO DE SEÑALES Una señal se define como la historia de los valores de aceleración que mide un acelerómetro en determinado tiempo para un punto específico.
Tema 6. LA EVALUACIÓN DE LA PRODUCCIÓN PÚBLICA. 1. Introducción: eficiencia técnica y eficiencia económica. 5. El análisis de frontera y el modelo DEA
 1. Introducción: eficiencia técnica y eficiencia económica 2. El análisis coste-beneficio (ACB) 3. La lógica del ACB 4. El análisis coste-eficacia (ACE) 5. El análisis de frontera y el modelo DEA 1. Introducción:
1. Introducción: eficiencia técnica y eficiencia económica 2. El análisis coste-beneficio (ACB) 3. La lógica del ACB 4. El análisis coste-eficacia (ACE) 5. El análisis de frontera y el modelo DEA 1. Introducción:
EL PAPEL DE LA ESTADISTICA EN O Y M. Objetivo: Identificar índices estadísticos, y métodos más convenientes, para aplicarlos en el estudio de O y M.
 EL PAPEL DE LA ESTADISTICA EN O Y M Objetivo: Identificar índices estadísticos, y métodos más convenientes, para aplicarlos en el estudio de O y M. O y M necesita apoyarse en la estadística que en casos
EL PAPEL DE LA ESTADISTICA EN O Y M Objetivo: Identificar índices estadísticos, y métodos más convenientes, para aplicarlos en el estudio de O y M. O y M necesita apoyarse en la estadística que en casos
DEPARTAMENTO DE MATEMATICAS IES ROSA CHACEL (Colmenar Viejo) Criterios de evaluación y criterios de calificación Matemáticas. 1º de E.S.O.
 Criterios de evaluación y criterios de calificación Matemáticas. 1º de E.S.O.") DEPARTAMENTO DE MATEMATICAS IES ROSA CHACEL (Colmenar Viejo) Criterios de evaluación y criterios de calificación Matemáticas. 1º de E.S.O. CRITERIOS DE EVALUACIÓN Los siguientes criterios de evaluación
DEPARTAMENTO DE MATEMATICAS IES ROSA CHACEL (Colmenar Viejo) Criterios de evaluación y criterios de calificación Matemáticas. 1º de E.S.O. CRITERIOS DE EVALUACIÓN Los siguientes criterios de evaluación
Evaluación de algoritmos de visión estereoscópica para un sistema de reconocimiento de la mano
 ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA DE TELECOMUNICACIÓN UNIVERSIDAD POLITÉCNICA DE CARTAGENA Proyecto Fin de Carrera Evaluación de algoritmos de visión estereoscópica para un sistema de reconocimiento
ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA DE TELECOMUNICACIÓN UNIVERSIDAD POLITÉCNICA DE CARTAGENA Proyecto Fin de Carrera Evaluación de algoritmos de visión estereoscópica para un sistema de reconocimiento
Técnicas numéricas para las Ecuaciones diferenciales de primer orden: Método de Euler
 Lección 6 Técnicas numéricas para las Ecuaciones diferenciales de primer orden: Método de Euler 61 Introducción a los métodos numéricos En este capítulo y en los anteriores estamos estudiado algunas técnicas
Lección 6 Técnicas numéricas para las Ecuaciones diferenciales de primer orden: Método de Euler 61 Introducción a los métodos numéricos En este capítulo y en los anteriores estamos estudiado algunas técnicas
Localización. CI-2657 Robótica M.Sc. Kryscia Ramírez Benavides
 M.Sc. Kryscia Ramírez Benavides Problemas de Navegación de los Robots Dónde estoy?. Dónde he estado? Mapa de decisiones. A dónde voy? Planificación de misiones. Cuál es la mejor manera de llegar? Planificación
M.Sc. Kryscia Ramírez Benavides Problemas de Navegación de los Robots Dónde estoy?. Dónde he estado? Mapa de decisiones. A dónde voy? Planificación de misiones. Cuál es la mejor manera de llegar? Planificación
UNIDAD 7: PROGRESIONES OBJETIVOS
 UNIDAD 7: PROGRESIONES Reconocer sucesiones y deducir su regla de formación en los casos en que sea posible. Obtener distintos términos en sucesiones recurrentes. Distinguir si una sucesión es una progresión
UNIDAD 7: PROGRESIONES Reconocer sucesiones y deducir su regla de formación en los casos en que sea posible. Obtener distintos términos en sucesiones recurrentes. Distinguir si una sucesión es una progresión
VISIÓN 3D. José M. Sebastián - Luis M. Jiménez. Problema Central de la Visión Artificial Tridimensional.
 VISIÓN 3D José M. Sebastián - Luis M. Jiménez Problema Central de la Visión Artificial Tridimensional. A partir de una imagen o de una secuencia de imágenes de un objeto estacionario o en movimiento, tomada
VISIÓN 3D José M. Sebastián - Luis M. Jiménez Problema Central de la Visión Artificial Tridimensional. A partir de una imagen o de una secuencia de imágenes de un objeto estacionario o en movimiento, tomada
Ejemplo Estimación con el método de Cocomo
 Ejemplo Estimación con el método de Cocomo Entre los distintos métodos de estimación de costes de desarrollo de software, el modelo COCOMO (COnstructive COst MOdel) desarrollado por Barry M. Boehm, se
Ejemplo Estimación con el método de Cocomo Entre los distintos métodos de estimación de costes de desarrollo de software, el modelo COCOMO (COnstructive COst MOdel) desarrollado por Barry M. Boehm, se
ANEXO 1. CALIBRADO DE LOS SENSORES.
 ANEXO 1. CALIBRADO DE LOS SENSORES. Las resistencias dependientes de la luz (LDR) varían su resistencia en función de la luz que reciben. Un incremento de la luz que reciben produce una disminución de
ANEXO 1. CALIBRADO DE LOS SENSORES. Las resistencias dependientes de la luz (LDR) varían su resistencia en función de la luz que reciben. Un incremento de la luz que reciben produce una disminución de
Procesadores de lenguaje Tema 5 Comprobación de tipos
 Procesadores de lenguaje Tema 5 Comprobación de tipos Departamento de Ciencias de la Computación Universidad de Alcalá Resumen Sistemas de tipos. Expresiones de tipo. Equivalencia de tipos. Sobrecarga,
Procesadores de lenguaje Tema 5 Comprobación de tipos Departamento de Ciencias de la Computación Universidad de Alcalá Resumen Sistemas de tipos. Expresiones de tipo. Equivalencia de tipos. Sobrecarga,
CC3001 Algoritmos y Estructuras de Datos Tarea 1: Algoritmos simples de ordenación
 CC3001 Algoritmos y Estructuras de Datos Tarea 1: Algoritmos simples de ordenación Profs. Nelson Baloian, Benjamin Bustos, José A. Pino 4 de agosto de 2009 Fecha de entrega: 18 de agosto de 2009 a las
CC3001 Algoritmos y Estructuras de Datos Tarea 1: Algoritmos simples de ordenación Profs. Nelson Baloian, Benjamin Bustos, José A. Pino 4 de agosto de 2009 Fecha de entrega: 18 de agosto de 2009 a las
Problemas Ampliación de Matemáticas. Sistemas lineales 1.- Encontrar la factorización L U de las siguientes matrices:
 Problemas Ampliación de Matemáticas. Sistemas lineales 1.- Encontrar la factorización L U de las siguientes matrices: 5 2 1 1 0 3 1 0 3 3 1 6. 3 1 6 5 2 1 2.- Dada la matriz A = 10 7 8 7 5 6, 8 6 10 hallar
Problemas Ampliación de Matemáticas. Sistemas lineales 1.- Encontrar la factorización L U de las siguientes matrices: 5 2 1 1 0 3 1 0 3 3 1 6. 3 1 6 5 2 1 2.- Dada la matriz A = 10 7 8 7 5 6, 8 6 10 hallar
Tema 01: Algoritmia y diagramas de flujo. Estructuras de datos (Prof. Edgardo A. Franco)
") Tema 1 Estructuras de datos (Prof. Edgardo A. Franco) Contenido Algoritmia Qué es un algoritmo? Métodos algorítmicos Diagrama de flujo Símbolos utilizados en los diagramas de flujo Reglas para la construcción
Tema 1 Estructuras de datos (Prof. Edgardo A. Franco) Contenido Algoritmia Qué es un algoritmo? Métodos algorítmicos Diagrama de flujo Símbolos utilizados en los diagramas de flujo Reglas para la construcción
Solución al parcial 14
 Solución al parcial 14 Marque V(erdadero) o F(also) según considere la proposición. 1. La lógica difusa es la emulación del razonamiento aproximado que realizan las máquinas. F: Las máquinas no realizan
Solución al parcial 14 Marque V(erdadero) o F(also) según considere la proposición. 1. La lógica difusa es la emulación del razonamiento aproximado que realizan las máquinas. F: Las máquinas no realizan
LÍNEAS DE INVESTICACIÓN
 LÍNEAS DE INVESTICACIÓN ANÁLISIS DE LA INVESTIGACIÓN EN DIDÁCTICA DE LA MATEMATICA Esta línea de trabajo aborda cuestiones relacionadas con los mecanismos de difusión de la investigación y su impacto en
LÍNEAS DE INVESTICACIÓN ANÁLISIS DE LA INVESTIGACIÓN EN DIDÁCTICA DE LA MATEMATICA Esta línea de trabajo aborda cuestiones relacionadas con los mecanismos de difusión de la investigación y su impacto en
Tema 2: PROCESAMIENTO EN EL DOMINIO ESPACIAL (Parte 2)
") Tema 2: PROCESAMIENTO EN EL DOMINIO ESPACIAL (Parte 2) 1 I N G E N I E R Í A I N F O R M Á T I C A D P T O. M A T E M Á T I C A A P L I C A D A I 2 ÍNDICE: Filtrado espacial Filtros de suavizado Filtros
Tema 2: PROCESAMIENTO EN EL DOMINIO ESPACIAL (Parte 2) 1 I N G E N I E R Í A I N F O R M Á T I C A D P T O. M A T E M Á T I C A A P L I C A D A I 2 ÍNDICE: Filtrado espacial Filtros de suavizado Filtros
Técnicas de inteligencia artificial. Visión Artificial Visión 3D
 Técnicas de inteligencia artificial Visión Artificial Visión 3D Indice Introducción Visión estéreo Introducción Cuando usamos una cámara, perdemos la información 3D x y z y x z y x Sin embargo, la información
Técnicas de inteligencia artificial Visión Artificial Visión 3D Indice Introducción Visión estéreo Introducción Cuando usamos una cámara, perdemos la información 3D x y z y x z y x Sin embargo, la información
LAS LENTES Y SUS CARACTERÍSTICAS
 LAS LENTES Y SUS CARACTERÍSTICAS Las lentes son cuerpos transparentes limitados por dos superficies esféricas o por una esférica y una plana, las lentes se emplean a fin de desviar las rayos luminosos
LAS LENTES Y SUS CARACTERÍSTICAS Las lentes son cuerpos transparentes limitados por dos superficies esféricas o por una esférica y una plana, las lentes se emplean a fin de desviar las rayos luminosos
Colegio Decroly Americano Matemática 7th Core, Contenidos I Período
 Matemática 7th Core, 2015-2016 Contenidos I Período 1. Sentido Numérico a. Identificar y escribir patrones. b. Escribir números en forma de exponentes. c. Escribir cantidades en notación científica. d.
Matemática 7th Core, 2015-2016 Contenidos I Período 1. Sentido Numérico a. Identificar y escribir patrones. b. Escribir números en forma de exponentes. c. Escribir cantidades en notación científica. d.
Estéreo dinámico. Estéreo dinámico
 Estéreo dinámico 1 Vectores locales de desplazamiento Dada una secuencia de imagenes Tomadas a intervalos Movimiento absoluto: movimiento independiente de la cámara Movimiento relativo: movimiento debido
Estéreo dinámico 1 Vectores locales de desplazamiento Dada una secuencia de imagenes Tomadas a intervalos Movimiento absoluto: movimiento independiente de la cámara Movimiento relativo: movimiento debido
 GRADIENTE La laplaciana es un buen filtro paso alto, pero no es una buena herramienta para resaltar o detectar los bordes. En muchos casos, los bordes o límites de las figuras o de las regiones aparecen
GRADIENTE La laplaciana es un buen filtro paso alto, pero no es una buena herramienta para resaltar o detectar los bordes. En muchos casos, los bordes o límites de las figuras o de las regiones aparecen
Curso de Procesamiento Digital de Imágenes
 Curso de Procesamiento Digital de Imágenes Impartido por: Elena Martínez Departamento de Ciencias de la Computación IIMAS, UNAM, cubículo 408 http://turing.iimas.unam.mx/~elena/teaching/pdi-mast.html elena.martinez@iimas.unam.mx
Curso de Procesamiento Digital de Imágenes Impartido por: Elena Martínez Departamento de Ciencias de la Computación IIMAS, UNAM, cubículo 408 http://turing.iimas.unam.mx/~elena/teaching/pdi-mast.html elena.martinez@iimas.unam.mx
banda, mayor es la distorsión, y mayor es la probabilidad de que se cometan errores en el receptor.
 banda, mayor es la distorsión, y mayor es la probabilidad de que se cometan errores en el receptor. Figura 1.10 Componentes en frecuencia de una onda cuadrada (T = 1/f). En la figura 1.11 se muestra una
banda, mayor es la distorsión, y mayor es la probabilidad de que se cometan errores en el receptor. Figura 1.10 Componentes en frecuencia de una onda cuadrada (T = 1/f). En la figura 1.11 se muestra una
Un importante problema para sistemas de la nueva generación
 Un importante problema para sistemas de la nueva generación J. A. Stankovic, Misconceptions about Real-Time Computing: A Serious Problem for Next Generation Systems, IEEE Computer, October 1988. Manifestar
Un importante problema para sistemas de la nueva generación J. A. Stankovic, Misconceptions about Real-Time Computing: A Serious Problem for Next Generation Systems, IEEE Computer, October 1988. Manifestar
Alineamiento múltiple de secuencias
 Dr. Eduardo A. RODRÍGUEZ TELLO CINVESTAV-Tamaulipas 11 de junio del 2013 Dr. Eduardo RODRÍGUEZ T. (CINVESTAV) Alineamiento múltiple de secuencias 11 de junio del 2013 1 / 39 1 Alineamiento múltiple de
Dr. Eduardo A. RODRÍGUEZ TELLO CINVESTAV-Tamaulipas 11 de junio del 2013 Dr. Eduardo RODRÍGUEZ T. (CINVESTAV) Alineamiento múltiple de secuencias 11 de junio del 2013 1 / 39 1 Alineamiento múltiple de
GRAFICOS DE CONTROL DATOS TIPO VARIABLES
 GRAFICOS DE CONTROL DATOS TIPO VARIABLES OBJETIVO DEL LABORATORIO El objetivo del presente laboratorio es que el estudiante conozca y que sea capaz de seleccionar y utilizar gráficos de control, para realizar
GRAFICOS DE CONTROL DATOS TIPO VARIABLES OBJETIVO DEL LABORATORIO El objetivo del presente laboratorio es que el estudiante conozca y que sea capaz de seleccionar y utilizar gráficos de control, para realizar
Partiendo de los criterios de evaluación de cada uno de los cursos se han definido los indicadores de logro para cada uno de ellos.
 E) IDENTIFICACIÓN DE LOS CONOCIMIENTOS Y APRENDIZAJES NECESARIOS PARA QUE EL ALUMNO ALCANCE UNA EVALUACIÓN POSITIVA AL FINAL DE CADA CURSO DE LA ETAPA. INDICADORES DE LOGRO O DESEMPEÑO. Partiendo de los
E) IDENTIFICACIÓN DE LOS CONOCIMIENTOS Y APRENDIZAJES NECESARIOS PARA QUE EL ALUMNO ALCANCE UNA EVALUACIÓN POSITIVA AL FINAL DE CADA CURSO DE LA ETAPA. INDICADORES DE LOGRO O DESEMPEÑO. Partiendo de los
Es un conjunto de palabras y símbolos que permiten al usuario generar comandos e instrucciones para que la computadora los ejecute.
 Los problemas que se plantean en la vida diaria suelen ser resueltos mediante el uso de la capacidad intelectual y la habilidad manual del ser humano. La utilización de la computadora en la resolución
Los problemas que se plantean en la vida diaria suelen ser resueltos mediante el uso de la capacidad intelectual y la habilidad manual del ser humano. La utilización de la computadora en la resolución
4.- Modelos de resolución exacta empleados.
 4.- Modelos de resolución exacta empleados. Una vez explicada la batería de problemas con la que vamos a trabajar, y según la metodología a seguir en este proyecto, pasamos a describir los modelos de resolución
4.- Modelos de resolución exacta empleados. Una vez explicada la batería de problemas con la que vamos a trabajar, y según la metodología a seguir en este proyecto, pasamos a describir los modelos de resolución
Actividad de Evaluación Brandon Emmanuelle Cuevas Rangel GPO: 303 Carrera: Informática 3er Semestre Joel Rocha Barocio Cienega de Flores N.L.
 Actividad de Evaluación 2.4.1 Brandon Emmanuelle Cuevas Rangel GPO: 303 Carrera: Informática 3er Semestre Joel Rocha Barocio Cienega de Flores N.L. Las técnicas de programación constituyen parte fundamental
Actividad de Evaluación 2.4.1 Brandon Emmanuelle Cuevas Rangel GPO: 303 Carrera: Informática 3er Semestre Joel Rocha Barocio Cienega de Flores N.L. Las técnicas de programación constituyen parte fundamental
Unidad II: Análisis semántico
 Unidad II: Análisis semántico Se compone de un conjunto de rutinas independientes, llamadas por los analizadores morfológico y sintáctico. El análisis semántico utiliza como entrada el árbol sintáctico
Unidad II: Análisis semántico Se compone de un conjunto de rutinas independientes, llamadas por los analizadores morfológico y sintáctico. El análisis semántico utiliza como entrada el árbol sintáctico
Álgebra Lineal Ma1010
 Álgebra Lineal Ma1010 Métodos Iterativos para Resolver Sistemas Lineales Departamento de Matemáticas ITESM Métodos Iterativos para Resolver Sistemas Lineales Álgebra Lineal - p. 1/30 En esta lectura veremos
Álgebra Lineal Ma1010 Métodos Iterativos para Resolver Sistemas Lineales Departamento de Matemáticas ITESM Métodos Iterativos para Resolver Sistemas Lineales Álgebra Lineal - p. 1/30 En esta lectura veremos
Introducción a Investigación de Operaciones. UCR ECCI CI-1453 Investigación de Operaciones III Prof. Bach. Kryscia Daviana Ramírez Benavides
 Introducción a Investigación de Operaciones UCR ECCI CI-1453 Investigación de Operaciones III Prof. Bach. Kryscia Daviana Ramírez Benavides Qué es la Investigación de Operaciones? Es una herramienta dominante
Introducción a Investigación de Operaciones UCR ECCI CI-1453 Investigación de Operaciones III Prof. Bach. Kryscia Daviana Ramírez Benavides Qué es la Investigación de Operaciones? Es una herramienta dominante
Funciones, límites y continuidad
 8/0/016 Funciones, límites y continuidad C U R S O 0 1 5-0 1 6 Funciones, limites y continuidad Los puntos rojos son los que entran en el eamen de º evaluación 1) Concepto de función. Dominio y recorrido.
8/0/016 Funciones, límites y continuidad C U R S O 0 1 5-0 1 6 Funciones, limites y continuidad Los puntos rojos son los que entran en el eamen de º evaluación 1) Concepto de función. Dominio y recorrido.
MODELOS DE INVESTIGACION DE OPERACIONES
 MODELOS DE INVESTIGACION DE OPERACIONES CARACTERÍSTICAS Los modelos se dividen en determinísticos (no probabilisticos) y estocásticos (probilisticos). Hay otros modelos híbridos porque incluyen las dos
MODELOS DE INVESTIGACION DE OPERACIONES CARACTERÍSTICAS Los modelos se dividen en determinísticos (no probabilisticos) y estocásticos (probilisticos). Hay otros modelos híbridos porque incluyen las dos
Redes de Neuronas de Base Radial
 Redes de Neuronas de Base Radial 1 Introducción Redes multicapa con conexiones hacia delante Única capa oculta Las neuronas ocultas poseen carácter local Cada neurona oculta se activa en una región distinta
Redes de Neuronas de Base Radial 1 Introducción Redes multicapa con conexiones hacia delante Única capa oculta Las neuronas ocultas poseen carácter local Cada neurona oculta se activa en una región distinta
PRÁCTICA N 1 ECUACIONES NO LINEALES. Nota: en todos los casos hallar las soluciones con 15 dígitos significativos
 PRÁCTICA N 1 ECUACIONES NO LINEALES Nota: en todos los casos hallar las soluciones con 15 dígitos significativos 1. Utiliza el método de Bisección y calcula la soluciones de las siguientes ecuaciones:
PRÁCTICA N 1 ECUACIONES NO LINEALES Nota: en todos los casos hallar las soluciones con 15 dígitos significativos 1. Utiliza el método de Bisección y calcula la soluciones de las siguientes ecuaciones:
1.- LENTES. OBJETIVOS: MATERIAL:
 1.- LENTES. OBJETIVOS: - Comprobar experimentalmente el mecanismo de formación de imágenes con una lente convergente. - Identificar en el laboratorio los conceptos básicos de la óptica geométrica: lentes,
1.- LENTES. OBJETIVOS: - Comprobar experimentalmente el mecanismo de formación de imágenes con una lente convergente. - Identificar en el laboratorio los conceptos básicos de la óptica geométrica: lentes,
ESTUDIO DE ALGORITMOS DE CÁLCULO DE DISPARIDAD PARA EL CONTROL DE CONVERGENCIA EN SISTEMAS ESTEREOSCÓPICOS
 ESTUDIO DE ALGORITMOS DE CÁLCULO DE DISPARIDAD PARA EL CONTROL DE CONVERGENCIA EN SISTEMAS ESTEREOSCÓPICOS Rafael Aracil, Luis M. Jiménez, Oscar Reinoso, César Fernández DCEYT, Universidad Miguel Hernández,
ESTUDIO DE ALGORITMOS DE CÁLCULO DE DISPARIDAD PARA EL CONTROL DE CONVERGENCIA EN SISTEMAS ESTEREOSCÓPICOS Rafael Aracil, Luis M. Jiménez, Oscar Reinoso, César Fernández DCEYT, Universidad Miguel Hernández,
1: INTRODUCCIÓN AL USO DE LA HOJA DE CALCULO EXCEL COMO HERRAMIENTA PARA DESARROLLAR PROBLEMAS EN INGENIERÍA. SOLVER, REGRESION LINEAL MULTIPLE
 Practica 1: INTRODUCCIÓN AL USO DE LA HOJA DE CALCULO EXCEL COMO HERRAMIENTA PARA DESARROLLAR PROBLEMAS EN INGENIERÍA. SOLVER, REGRESION LINEAL MULTIPLE I. INTRODUCCION Las planillas de cálculo se han
Practica 1: INTRODUCCIÓN AL USO DE LA HOJA DE CALCULO EXCEL COMO HERRAMIENTA PARA DESARROLLAR PROBLEMAS EN INGENIERÍA. SOLVER, REGRESION LINEAL MULTIPLE I. INTRODUCCION Las planillas de cálculo se han
Práctica 4 Límites, continuidad y derivación
 Práctica 4 Límites, continuidad y derivación En esta práctica utilizaremos el programa Mathematica para estudiar límites, continuidad y derivabilidad de funciones reales de variable real, así como algunas
Práctica 4 Límites, continuidad y derivación En esta práctica utilizaremos el programa Mathematica para estudiar límites, continuidad y derivabilidad de funciones reales de variable real, así como algunas
todos los objetos que nos rodean. Con un solo ojo esto no se puede apreciar.
 SIMULACION DE LA VISION ESTEREOSCOPICA PARTE II: SIMULACION MEDIANTE UN TRAZADOR DE RAYOS Antonio Fernández Caballero Gabriel Sebastián Rivera Edwin Paredes Calizaya Antonio Fernández Caballero es profesor
SIMULACION DE LA VISION ESTEREOSCOPICA PARTE II: SIMULACION MEDIANTE UN TRAZADOR DE RAYOS Antonio Fernández Caballero Gabriel Sebastián Rivera Edwin Paredes Calizaya Antonio Fernández Caballero es profesor
UNIVERSIDAD DE LAS FUERZAS ARMADAS-ESPE EXTENSIÓN LATACUNGA CARRERA DE INGENIERÍA ELECTRÓNICA E INSTRUMENTACIÓN
 UNIVERSIDAD DE LAS FUERZAS ARMADAS-ESPE EXTENSIÓN LATACUNGA CARRERA DE INGENIERÍA ELECTRÓNICA E INSTRUMENTACIÓN DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE MONITOREO DE TEMPERATURA CORPORAL Y AMBIENTAL APLICANDO
UNIVERSIDAD DE LAS FUERZAS ARMADAS-ESPE EXTENSIÓN LATACUNGA CARRERA DE INGENIERÍA ELECTRÓNICA E INSTRUMENTACIÓN DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE MONITOREO DE TEMPERATURA CORPORAL Y AMBIENTAL APLICANDO
Ejercicios de Funciones, límites y continuidad.
 Matemáticas 2ºBach CNyT. Ejercicios Funciones: Límites, Continuidad.. Pág 1/10 Ejercicios de Funciones, límites y continuidad. 1. Observa la gráfica de esta función f(x) y calcular estos límites. 2. Calcular
Matemáticas 2ºBach CNyT. Ejercicios Funciones: Límites, Continuidad.. Pág 1/10 Ejercicios de Funciones, límites y continuidad. 1. Observa la gráfica de esta función f(x) y calcular estos límites. 2. Calcular
7. PROGRAMACION LINEAL
 7. PROGRAMACION LINEAL 7.1. INTRODUCCION A LA PROGRMACION LINEAL 7.2. FORMULACION DE UN PROBLEMA LINEAL 7.3. SOLUCION GRAFICA DE UN PROBLEMA LINEAL 7.4. CASOS ESPECIALES DE PROBLEMAS LINEALES 7.4.1. Problemas
7. PROGRAMACION LINEAL 7.1. INTRODUCCION A LA PROGRMACION LINEAL 7.2. FORMULACION DE UN PROBLEMA LINEAL 7.3. SOLUCION GRAFICA DE UN PROBLEMA LINEAL 7.4. CASOS ESPECIALES DE PROBLEMAS LINEALES 7.4.1. Problemas
Tema 1 Magnitudes físicas y actividad científica
 Tema 1 Magnitudes físicas y actividad científica Guía de Actividades Cada tema tendrá una serie de actividades que representan los distintos tipos de actividades que podrás encontrar en los exámenes. Estas
Tema 1 Magnitudes físicas y actividad científica Guía de Actividades Cada tema tendrá una serie de actividades que representan los distintos tipos de actividades que podrás encontrar en los exámenes. Estas
Conceptos de Algoritmos, Datos y Programas
 Conceptos de Algoritmos, Datos y Programas Año 2015 Carreras: Lic. en Informática P2015 Lic. en Sistemas P2015 APU P2015 Año: 1 Duración: Cuatrimestral Coordinador: Ing. Armando De Giusti Profesores: Esp.
Conceptos de Algoritmos, Datos y Programas Año 2015 Carreras: Lic. en Informática P2015 Lic. en Sistemas P2015 APU P2015 Año: 1 Duración: Cuatrimestral Coordinador: Ing. Armando De Giusti Profesores: Esp.
1. Secuencia y temporalización de los contenidos.
 1. Secuencia y temporalización de los contenidos. Secuencia de los contenidos Bloque 1. La sociedad de la información y el ordenador Las tecnologías de la información y la comunicación. Campos de aplicación.
1. Secuencia y temporalización de los contenidos. Secuencia de los contenidos Bloque 1. La sociedad de la información y el ordenador Las tecnologías de la información y la comunicación. Campos de aplicación.
INDICADORES MULTIVARIADOS DE CAPACIDAD DE PROCESOS. SU EFICIENCIA BAJO DISTRIBUCIONES NORMALES.
 Dianda, Daniela Hernández, Lucia Quaglino, Marta Pagura, José Alberto Instituto de Investigaciones Teóricas y Aplicadas de la Escuela de Estadística INDICADORES MULTIVARIADOS DE CAPACIDAD DE PROCESOS.
Dianda, Daniela Hernández, Lucia Quaglino, Marta Pagura, José Alberto Instituto de Investigaciones Teóricas y Aplicadas de la Escuela de Estadística INDICADORES MULTIVARIADOS DE CAPACIDAD DE PROCESOS.
Dinámica del Robot. UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides
 UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción La dinámica se ocupa de la relación entre las fuerzas que actúan sobre un cuerpo y el movimiento en el que se origina.
UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción La dinámica se ocupa de la relación entre las fuerzas que actúan sobre un cuerpo y el movimiento en el que se origina.
2007/ PROGRAMACIÓN. Tipo: TRO Curso: 1 Semestre: AB CREDITOS Totales TA TS AT AP PA OBJETIVOS. 1.-Introducción.
 2007/2008 Tipo: TRO Curso: 1 Semestre: AB CREDITOS Totales TA TS AT AP PA OBJETIVOS 1.-Introducción. -Comprender cómo funciona un lenguaje de programación 2. Características del lenguaje C -Entender las
2007/2008 Tipo: TRO Curso: 1 Semestre: AB CREDITOS Totales TA TS AT AP PA OBJETIVOS 1.-Introducción. -Comprender cómo funciona un lenguaje de programación 2. Características del lenguaje C -Entender las
Proyectos Informáticos. Ing. Isabel León P.
 Proyectos Informáticos Ing. Isabel León P. Definición de software. Para nosotros será el conjunto de información: capaz de producir en las maquinas el comportamiento deseado, de forma eficaz y eficiente,
Proyectos Informáticos Ing. Isabel León P. Definición de software. Para nosotros será el conjunto de información: capaz de producir en las maquinas el comportamiento deseado, de forma eficaz y eficiente,
Robótica I ACB Participantes Comité para el Diseño de Especialidad de la DIET. Academia de Sistemas Digitales de la DIET
 1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica I Ingeniería Electrónica ACB - 0802 4 0 8 2. HISTORIA DEL PROGRAMA. Lugar
1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica I Ingeniería Electrónica ACB - 0802 4 0 8 2. HISTORIA DEL PROGRAMA. Lugar
Al considerar varios polígonos regulares inscritos resulta: perímetro del cuadrado < π. perímetro del 96 gono < π
 AMPLIACIÓN DE MATEMÁTICAS INTRODUCCIÓN Método Constructivo: Conjunto de instrucciones que permiten calcular la solución de un problema, bien en un número finito de pasos, bien en un proceso de paso al
AMPLIACIÓN DE MATEMÁTICAS INTRODUCCIÓN Método Constructivo: Conjunto de instrucciones que permiten calcular la solución de un problema, bien en un número finito de pasos, bien en un proceso de paso al
INSTITUTO SANTA CECILIA - MATEMÁTICA
 INSTITUTO SANTA CECILIA - MATEMÁTICA MÓDULO DE ORIENTACIÓN Cursos: 1º A y B 1) Se colocaron 15 filas con 35 árboles en un bosque. Para el siguiente año se quiere cuadruplicar la cantidad de árboles. Señalar
INSTITUTO SANTA CECILIA - MATEMÁTICA MÓDULO DE ORIENTACIÓN Cursos: 1º A y B 1) Se colocaron 15 filas con 35 árboles en un bosque. Para el siguiente año se quiere cuadruplicar la cantidad de árboles. Señalar
CONTENIDOS MÍNIMOS MATEMÁTICAS 2º Y 4º E.S.O.
 CONTENIDOS MÍNIMOS MATEMÁTICAS 2º Y 4º E.S.O. Matemáticas 2º E.S.O. a) Contenidos comunes. Utilizar estrategias y técnicas sencillas en la resolución de problemas. b) Números. Conocer los conceptos de
CONTENIDOS MÍNIMOS MATEMÁTICAS 2º Y 4º E.S.O. Matemáticas 2º E.S.O. a) Contenidos comunes. Utilizar estrategias y técnicas sencillas en la resolución de problemas. b) Números. Conocer los conceptos de
Visión por computadora Computer vision
 Visión por computadora Computer vision Conjunto de algoritmos que permiten obtener una representación visual del mundo, suficiente para la realización de una tarea dada. Representación visual El mundo:
Visión por computadora Computer vision Conjunto de algoritmos que permiten obtener una representación visual del mundo, suficiente para la realización de una tarea dada. Representación visual El mundo:
HERENCIA Y TIPOS. Articulo. Video Audio Altavoces. Amplificador
 HERENCIA Y TIPOS. Las clases con propiedades y funciones comunes se agrupan en una superclase. Las clases que se derivan de una superclase son las subclases. Las clases se organizan como jerarquía de clases.
HERENCIA Y TIPOS. Las clases con propiedades y funciones comunes se agrupan en una superclase. Las clases que se derivan de una superclase son las subclases. Las clases se organizan como jerarquía de clases.
VISIÓN POR COMPUTADOR
 VISIÓN POR COMPUTADOR Introducción Ingeniería de Sistemas y Automática Universidad Miguel Hernández Tabla de Contenidos 2 Definición de Visión por Computador Captación Información Luminosa Imagen Digital
VISIÓN POR COMPUTADOR Introducción Ingeniería de Sistemas y Automática Universidad Miguel Hernández Tabla de Contenidos 2 Definición de Visión por Computador Captación Información Luminosa Imagen Digital
Evaluación del impacto de metamateriales en antenas de microcintas.
 Revista Telem@tica. Vol. 12. No. 3, septiembre-diciembre, 2013, p. 13-21 ISSN 1729-3804 Evaluación del impacto de metamateriales en antenas de microcintas. Danelys Rodríguez Ávila 1, Yadier Santos Belett
Revista Telem@tica. Vol. 12. No. 3, septiembre-diciembre, 2013, p. 13-21 ISSN 1729-3804 Evaluación del impacto de metamateriales en antenas de microcintas. Danelys Rodríguez Ávila 1, Yadier Santos Belett
Granularidad y latencia
 Niveles de paralelismo y latencias de comunicación Niveles de paralelismo. Granularidad o tamaño de grano. Latencia de comunicación. Particionado de los programas. Empaquetado de granos. Planificación
Niveles de paralelismo y latencias de comunicación Niveles de paralelismo. Granularidad o tamaño de grano. Latencia de comunicación. Particionado de los programas. Empaquetado de granos. Planificación
Introducción a la programación: Algoritmos
 Introducción a la programación: Algoritmos Algoritmo La palabra algoritmo proviene del nombre del matemático persa del siglo IX Muhammad ibn Musa al-jwarizmi Un algoritmo es una secuencia ordenada de pasos,
Introducción a la programación: Algoritmos Algoritmo La palabra algoritmo proviene del nombre del matemático persa del siglo IX Muhammad ibn Musa al-jwarizmi Un algoritmo es una secuencia ordenada de pasos,
Resolución de sistemas de ecuaciones lineales
 Tema 2 Resolución de sistemas de ecuaciones lineales 21 Métodos directos de resolución de sistemas de ecuaciones lineales 211 Resolución de sistemas triangulares Definición 211 Una matriz A se dice triangular
Tema 2 Resolución de sistemas de ecuaciones lineales 21 Métodos directos de resolución de sistemas de ecuaciones lineales 211 Resolución de sistemas triangulares Definición 211 Una matriz A se dice triangular
INTRODUCCIÓN A LA MECÁNICA DEL ROBOT. Curso de Extensión. Tema 2. Laboratorio de Robótica Aplicada (LABRA) 1
 1") Curso de Extensión INTRODUCCIÓN A LA ROBÓTICA MÓVILM (LABRA) 1 Curso de Introducción n a la Robótica MóvilM Tema 2 MECÁNICA DEL ROBOT (LABRA) 2 La Capa Física: F Diseño o Mecánico Configuración de las
Curso de Extensión INTRODUCCIÓN A LA ROBÓTICA MÓVILM (LABRA) 1 Curso de Introducción n a la Robótica MóvilM Tema 2 MECÁNICA DEL ROBOT (LABRA) 2 La Capa Física: F Diseño o Mecánico Configuración de las
UNIVERSIDAD NACIONAL DE SAN ANTONIO ABAD DEL CUSCO
 FACULTAD DE CS. QUIMICAS, FISICAS Y MATEMATICAS I. DATOS GENERALES DEPARTAMENTO ACADEMICO DE INFORMATICA SILABO 1.1 Asignatura : METODOS NUMERICOS 1.2 Categoría : OE 1.3 Código : IF758VCI 1.4 Créditos
FACULTAD DE CS. QUIMICAS, FISICAS Y MATEMATICAS I. DATOS GENERALES DEPARTAMENTO ACADEMICO DE INFORMATICA SILABO 1.1 Asignatura : METODOS NUMERICOS 1.2 Categoría : OE 1.3 Código : IF758VCI 1.4 Créditos
ALGORÍTMICA
 ALGORÍTMICA 2012-2013 Parte I. Introducción a las Metaheurísticas Tema 1. Metaheurísticas: Introducción y Clasificación Parte II. Métodos Basados en Trayectorias y Entornos Tema 2. Algoritmos de Búsqueda
ALGORÍTMICA 2012-2013 Parte I. Introducción a las Metaheurísticas Tema 1. Metaheurísticas: Introducción y Clasificación Parte II. Métodos Basados en Trayectorias y Entornos Tema 2. Algoritmos de Búsqueda
Figura 1: Propiedades de textura: (a) Suavidad, (b) Rugosidad y (c) Regularidad
 Suavidad, (b) Rugosidad y (c) Regularidad") 3 TEXTURA 3.1 CONCEPTO DE LA TEXTURA La textura es una característica importante utilizada en segmentación, identificación de objetos o regiones de interés en una imagen y obtención de forma. El uso de
3 TEXTURA 3.1 CONCEPTO DE LA TEXTURA La textura es una característica importante utilizada en segmentación, identificación de objetos o regiones de interés en una imagen y obtención de forma. El uso de
CRITERIOS DE SELECCIÓN DE MODELOS
 Inteligencia artificial y reconocimiento de patrones CRITERIOS DE SELECCIÓN DE MODELOS 1 Criterios para elegir un modelo Dos decisiones fundamentales: El tipo de modelo (árboles de decisión, redes neuronales,
Inteligencia artificial y reconocimiento de patrones CRITERIOS DE SELECCIÓN DE MODELOS 1 Criterios para elegir un modelo Dos decisiones fundamentales: El tipo de modelo (árboles de decisión, redes neuronales,
CURSO DE METODOS NUMERICOS INDICE
 CURSO DE METODOS NUMERICOS INDICE PRIMERA PART E: INTRODUCCION AL ANALISIS NUMERICO Y A LA COMPUTACION Capítulo I. Introducción al Análisis Numérico. 1. Algoritmos y diagramas de flujo. pg. 1 2. Origen
CURSO DE METODOS NUMERICOS INDICE PRIMERA PART E: INTRODUCCION AL ANALISIS NUMERICO Y A LA COMPUTACION Capítulo I. Introducción al Análisis Numérico. 1. Algoritmos y diagramas de flujo. pg. 1 2. Origen
UNIVERSIDAD COMPLUTENSE DE MADRID
 Principales conceptos que se tendrán en cuenta en la elaboración de las pruebas de Acceso a la Universidad para los estudiantes provenientes del Bachillerato LOGSE de la materia "Matemáticas II" ÁLGEBRA
Principales conceptos que se tendrán en cuenta en la elaboración de las pruebas de Acceso a la Universidad para los estudiantes provenientes del Bachillerato LOGSE de la materia "Matemáticas II" ÁLGEBRA
ESTRUCTURA DEL EXAMEN DE MATEMÁTICAS APLICADAS A LAS CIENCIAS SOCIALES II PARA ALUMNOS DE BACHILLERATO
 ESTRUCTURA DEL EXAMEN DE MATEMÁTICAS APLICADAS A LAS CIENCIAS SOCIALES II PARA ALUMNOS DE BACHILLERATO El examen presentará dos opciones diferentes entre las que el alumno deberá elegir una y responder
ESTRUCTURA DEL EXAMEN DE MATEMÁTICAS APLICADAS A LAS CIENCIAS SOCIALES II PARA ALUMNOS DE BACHILLERATO El examen presentará dos opciones diferentes entre las que el alumno deberá elegir una y responder
TALLERES DE METODOS NUMERICOS SOLUCION NUMERICA DE ECUACIONES NO LINEALES
 TALLERES DE METODOS NUMERICOS SOLUCION NUMERICA DE ECUACIONES NO LINEALES. Usar un procedimiento iterativo para calcular una aproimación a la menor raíz positiva de la ecuación : sen π = 0 Calcular tres
TALLERES DE METODOS NUMERICOS SOLUCION NUMERICA DE ECUACIONES NO LINEALES. Usar un procedimiento iterativo para calcular una aproimación a la menor raíz positiva de la ecuación : sen π = 0 Calcular tres
Un algoritmo es una serie de pasos lógicos y organizados que describe el proceso que se debe seguir, para dar solución a un problema específico.
 ALGORITMIA 1 Definición de Programa (Algoritmo) Un algoritmo es una serie de pasos lógicos y organizados que describe el proceso que se debe seguir, para dar solución a un problema específico. 2 Tipos
ALGORITMIA 1 Definición de Programa (Algoritmo) Un algoritmo es una serie de pasos lógicos y organizados que describe el proceso que se debe seguir, para dar solución a un problema específico. 2 Tipos
UNIDAD NO. 01 CONCEPTOS INFORMÁTICOS BÁSICOS
 UNIDAD NO. 01 CONCEPTOS INFORMÁTICOS BÁSICOS Objetivo general de la unidad: Explicar conceptos básicos computacionales partiendo del concepto general de sistema. 1.1 CONCEPTO DE DATO E INFORMACIÓN Dato:
UNIDAD NO. 01 CONCEPTOS INFORMÁTICOS BÁSICOS Objetivo general de la unidad: Explicar conceptos básicos computacionales partiendo del concepto general de sistema. 1.1 CONCEPTO DE DATO E INFORMACIÓN Dato:
Índice. TEMA 11. Equipos de metrología dimensional Máquinas medidoras de formas. 1. Descripción de las máquinas medidoras de formas (MMF).
.") INTRODUCCIÓN A LA METROLOGÍA Curso Académico 2011-1212 Rafael Muñoz Bueno Laboratorio de Metrología y Metrotecnia LMM-ETSII-UPM TEMA 11. Equipos de metrología dimensional Máquinas medidoras de formas Índice
INTRODUCCIÓN A LA METROLOGÍA Curso Académico 2011-1212 Rafael Muñoz Bueno Laboratorio de Metrología y Metrotecnia LMM-ETSII-UPM TEMA 11. Equipos de metrología dimensional Máquinas medidoras de formas Índice
INTRODUCCIÓN. Depósito Legal: NA3220/2010 ISSN: REVISTA ARISTA DIGITAL
 1-COMPROBACIÓN DEL ESPESOR E INTERV AL O ENTRE DIENTES EN ENGRAN AJ ES CILÍNDRICOS RECTOS 01/09/2011 Número 12 AUTOR: Javier Domínguez Equiza CENTRO TRABAJO: IES Cinco Villas INTRODUCCIÓN El objetivo de
1-COMPROBACIÓN DEL ESPESOR E INTERV AL O ENTRE DIENTES EN ENGRAN AJ ES CILÍNDRICOS RECTOS 01/09/2011 Número 12 AUTOR: Javier Domínguez Equiza CENTRO TRABAJO: IES Cinco Villas INTRODUCCIÓN El objetivo de
Lenguajes III Análisis y Diseño de Algoritmos
 Lenguajes III Análisis y Diseño de Algoritmos Andrés Becerra Sandoval Código: CC060 Créditos: 3 Prerequisitos: Desarrollo Formal de programas Naturaleza del Curso El curso argumenta la necesidad de considerar
Lenguajes III Análisis y Diseño de Algoritmos Andrés Becerra Sandoval Código: CC060 Créditos: 3 Prerequisitos: Desarrollo Formal de programas Naturaleza del Curso El curso argumenta la necesidad de considerar
COMPETENCIA S Y OBJETIVOS DE M A T E M ÁTICAS DE SEXTO
 1 CONSEJERÍA DE EDUCACIÓN CEIP EL ZARGAL C/ Zargal s/n; 18190 CENES DE LA VEGA Telfs. 958893177-78 ; FAX 958893179 18001792.averroes@juntadeandalucia.es COMPETENCIA S Y DE M A T E M ÁTICAS DE SEXTO ÍNDICE
1 CONSEJERÍA DE EDUCACIÓN CEIP EL ZARGAL C/ Zargal s/n; 18190 CENES DE LA VEGA Telfs. 958893177-78 ; FAX 958893179 18001792.averroes@juntadeandalucia.es COMPETENCIA S Y DE M A T E M ÁTICAS DE SEXTO ÍNDICE