Apéndice A. Construcción
|
|
|
- Ana Isabel Crespo San Segundo
- hace 5 años
- Vistas:
Transcripción

1 Apéndice A. Construcción 5.1. Chasis Para más información de las piezas utilizadas en cada paso, consultar el Apéndice B

2 003 Para unir las vigas se usan los pins de colores negro o gris. Los negros realizan una conexión con mayor fricción, y los grises pueden ocuparse cuando se construyen conexiones diseñadas para ser móviles [FERRARI, 2002]. 004.
3

4 007 La llanta actúa como una palanca: mientras más separada esté de su soporte, mayor será la fuerza aplicada al eje. Esta fuerza tiende a doblar los ejes o incluso las vigas, lo cual produciría una mayor fricción entre las mismas [FERRARI, 2002]. 008
5 009 Un factor importante que se debe considerar a la hora de construir un robot móvil es la fricción. Una parte importante donde se recomienda minimizar la fricción es en las uniones de las llantas con la estructura que las sostiene, ya que es el punto donde se transfiere todo el peso a las llantas por medio de los ejes [FERRARI, 2002]. 010
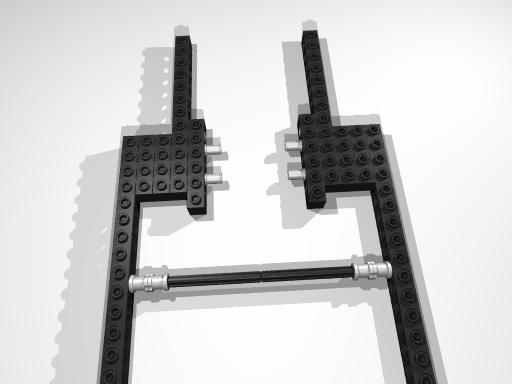
6 011 También es conveniente mencionar que siempre es mejor soportar cada eje con dos vigas en lugar de sólo usar una, este es el principal motivo de este diseño de chasis. 012

7 013 Para los robots se seleccionó una tracción delantera, ya que el mayor peso estará cargado en la parte de enfrente, por lo cual es en esa zona donde se necesita la mayor fuerza. 014
8
9

10
11

12
13
14

15

16
17

18
19
20
21
22
23
24
25
26

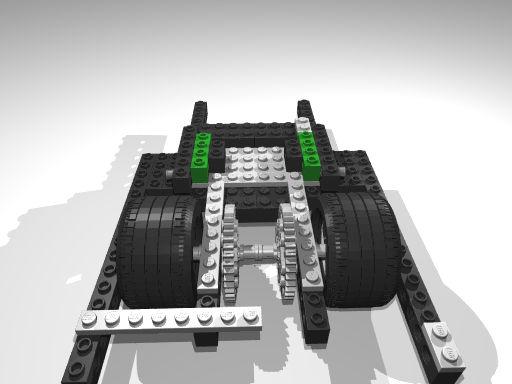
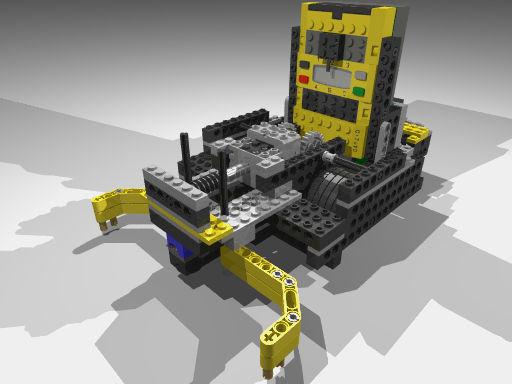
27 053 Este diseño de llanta trasera tiene el propósito de permitirle al robot tener una buena movilidad. Cada llanta es independiente de la otra, y a su vez las dos lo son del eje que las sostiene. En caso de no usarse una configuración similar, cuando el robot intente dar una vuelta las llantas se atorarían y puede que el robot gire mal por la fricción generada, o que llegue al punto de no girar en absoluto [FERRARI, 2002]. Esta solución mostrada también podría lograrse usando una sola llanta trasera, pero al tener dos el robot logra una mayor estabilidad y distribución del peso.

28 RCX 055
29
30

31
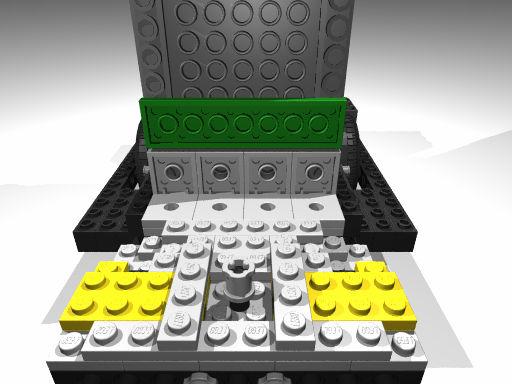
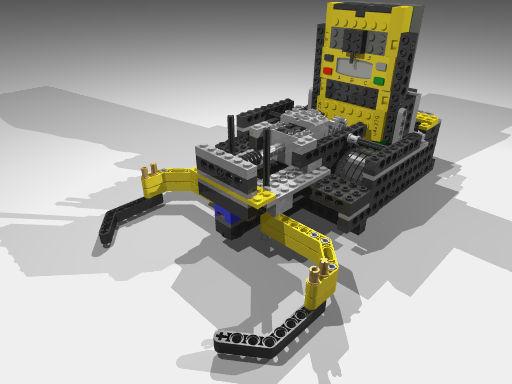
32 062 El RCX se posicionó hacia arriba para mejorar la recepción de los robots, ya que la IR Tower está colocada dos metros sobre la cancha. 063

33 064 El sensor de luz está instalado en una posición muy baja para lograr una mejor lectura al encontrar la pelota. 065

34 5.3. Pinzas

35
36
37
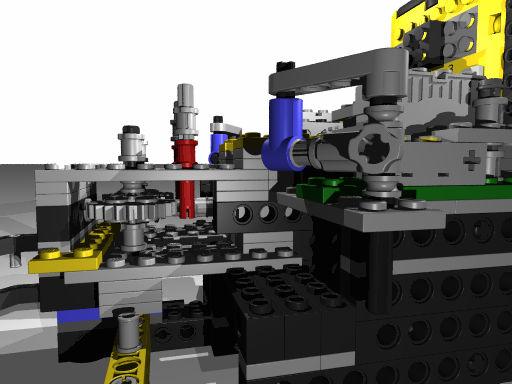
38 074 El engrane de gusano tiene varias propiedades [MARTIN, 1995]: Puede ser usado para hacer girar otros engranes. No puede ser girado por otros engranes. Mueve engranes que están perpendiculares a su propio eje. El engrane de gusano es un engrane de un diente solamente. Se usa sólo para disminuir drásticamente la velocidad y aumentar la fuerza.
39


40

41
42
43
44
45
46 089 El encapsulamiento del engrane de gusano entre piezas resistentes hace que las pinzas sólo tengan dos posiciones: abiertas y cerradas. Aunque se exceda el tiempo que se le da al motor para abrir o cerrar las pinzas, estas no provocarán que el robot se desarme. 090

47 5.4. Sensores de Tacto y Motores
48

49
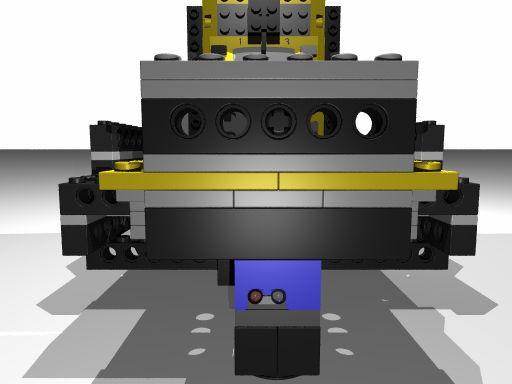
![Cada Electric Technic Mini-Motor 9v tiene un peso de 28 gr. y una velocidad de rotación de 340 rmp [WEB23]. 097 Al observar el robot casi terminado se puede notar que tiene un peso considerable.](/docs-images/89/98328029/images/50-1.jpg "Si los motores estuvieran directamente conectados a las llantas no se lograría un movimiento como el que se tenía planeado, es muy probable que no tenga la fuerza para mover su propio peso.")
50 Cada Electric Technic Mini-Motor 9v tiene un peso de 28 gr. y una velocidad de rotación de 340 rmp [WEB23]. 097 Al observar el robot casi terminado se puede notar que tiene un peso considerable. Si los motores estuvieran directamente conectados a las llantas no se lograría un movimiento como el que se tenía planeado, es muy probable que no tenga la fuerza para mover su propio peso. Los motores funcionan con una proporción inversamente proporcional entre fuerza y velocidad: a más fuerza menos velocidad y a más velocidad menos fuerza. Existe una forma de aumentar cualquiera de las dos, por medio del uso de engranes. En el robot se aprecian 3 engranes conectados a cada motor: Engrane de 16 dientes Directamente en el motor. Engrane de 24 dientes Intermedio. Engrane de 40 dientes En el eje que da movimiento a la llanta.

51 Haciendo un poco de operaciones notamos que por cada vuelta que dé el primer engrane, el segundo dará vueltas, y a su vez, por cada vuelta del engrane intermedio el tercer engrane dará 0.6 vueltas: = = Con el uso de estos engranes es este orden específico se ve una clara disminución de la velocidad del robot, ya que por cada vuelta que dé el primer engrane el tercero dará sólo 0.4 vueltas: 1vuelta segundo engrane 0.6 vuelta tercerengrane = 0.666vuelta segundo engrane? [ ( 0.666)( 0.6) ] Al disminuir la velocidad logramos un aumento en la fuerza del robot. 1:0.666:0.4 1 = 098
52

53
54
55

56 107 Los sensores de tacto están diseñados para ser activados cada vez que son presionados, pero tienen una configuración inversa, ya que en verdad están siendo liberados. De inicio los sensores siempre estarán presionados, y al más pequeño contacto serán liberados y ejecutarán acciones de evasión de obstáculos. La experimentación señala que los sensores con esta configuración son más sensibles a los contactos.
RD-LD-09. Paso 1. Universidad Católica Andrés Bello Facultad de Humanidades y Educación Escuela de Educación
 Nombre: [Robot Didáctico LegoDacta 09] Función: Robot para entrenamiento inicial en robótica móvil e interacción con los cuatro tipos de sensores básicos. Este modelo se creó especialmente para actualizar
Nombre: [Robot Didáctico LegoDacta 09] Función: Robot para entrenamiento inicial en robótica móvil e interacción con los cuatro tipos de sensores básicos. Este modelo se creó especialmente para actualizar
PRINCIPIOS DEL TREN DE FUERZA FUNCIONES DEL TREN DE FUERZA 19/07/2014. qué es Tren de fuerza?
 qué es Tren de fuerza? Es un grupo de componentes que trabajan juntos para transferir energía desde la fuente donde se produce la energía al punto donde se requiere realizar un trabajo. FUNCIONES DEL TREN
qué es Tren de fuerza? Es un grupo de componentes que trabajan juntos para transferir energía desde la fuente donde se produce la energía al punto donde se requiere realizar un trabajo. FUNCIONES DEL TREN
Es un mecanismo formado por un eje y una rueda acanalada, por la que pasa una cuerda o una correa.
 La polea: Es un mecanismo formado por un eje y una rueda acanalada, por la que pasa una cuerda o una correa. Para qué sirve? Para cambiar la dirección en la que actúa una fuerza y disminuir el esfuerzo
La polea: Es un mecanismo formado por un eje y una rueda acanalada, por la que pasa una cuerda o una correa. Para qué sirve? Para cambiar la dirección en la que actúa una fuerza y disminuir el esfuerzo
Viga 1 x 2 [16 piezas] eje [8 piezas] piezas] Viga de 1 x 2 doble agujero [2 piezas] Viga 2 x 4 en forma de L [2 piezas]
![Viga 1 x 2 [16 piezas] eje [8 piezas] piezas] Viga de 1 x 2 doble agujero [2 piezas] Viga 2 x 4 en forma de L [2 piezas]](/thumbs/52/29223259.jpg "Viga 1 x 2 [16 piezas] eje [8 piezas] piezas] Viga de 1 x 2 doble agujero [2 piezas] Viga 2 x 4 en forma de L [2 piezas]") A.- Vigas - I [10 modelos] (7) Viga 1 x 10 [8 Viga 1 x 2 [16 (9) Viga 1 x 6 [8 (10) Viga Angular Viga de 1 x 12 [6 (12) Viga de 1 x 16 [6 (13) Viga de 1 x 2 con entrada de eje [8 (14) Viga de 1 x 4 [12
A.- Vigas - I [10 modelos] (7) Viga 1 x 10 [8 Viga 1 x 2 [16 (9) Viga 1 x 6 [8 (10) Viga Angular Viga de 1 x 12 [6 (12) Viga de 1 x 16 [6 (13) Viga de 1 x 2 con entrada de eje [8 (14) Viga de 1 x 4 [12
0.- INTRODUCCIÓN. Fuerza y movimiento obtenidos en el elemento RECEPTOR. Fuerza y movimiento proporcionado por el elemento MOTRIZ MECANISMO
 0.- INTRODUCCIÓN. En general, todas las máquinas se componen de mecanismos; gracias a ellos, el impulso que proviene del esfuerzo muscular o de un motor se traduce en el tipo de movimiento y la fuerza
0.- INTRODUCCIÓN. En general, todas las máquinas se componen de mecanismos; gracias a ellos, el impulso que proviene del esfuerzo muscular o de un motor se traduce en el tipo de movimiento y la fuerza
móvil) conectado a un mecanismo de tracción.
 conectado a un mecanismo de tracción.") La polea: Es un mecanismo formado por un eje y una rueda acanalada, por la que pasa una cuerda o una correa. Para qué sirve? Para cambiar la dirección en la que actúa una fuerza y disminuir el esfuerzo
La polea: Es un mecanismo formado por un eje y una rueda acanalada, por la que pasa una cuerda o una correa. Para qué sirve? Para cambiar la dirección en la que actúa una fuerza y disminuir el esfuerzo
Como se conoce, las poleas son usadas en múltiples mecanismos utilizados en diversos quehaceres productivos y muchos otros. Aquí se muestran algunos
 Como se conoce, las poleas son usadas en múltiples mecanismos utilizados en diversos quehaceres productivos y muchos otros. Aquí se muestran algunos ejemplos: Información Clave Dos poleas unidas por una
Como se conoce, las poleas son usadas en múltiples mecanismos utilizados en diversos quehaceres productivos y muchos otros. Aquí se muestran algunos ejemplos: Información Clave Dos poleas unidas por una
MAQUINAS Y MECANISMOS
 MAQUINAS Y MECANISMOS INTRODUCCIÓN El ser humano necesita realizar trabajos que sobrepasan sus posibilidades: mover rocas muy pesadas, elevar coches para repararlos, transportar objetos o personas a grandes
MAQUINAS Y MECANISMOS INTRODUCCIÓN El ser humano necesita realizar trabajos que sobrepasan sus posibilidades: mover rocas muy pesadas, elevar coches para repararlos, transportar objetos o personas a grandes
INTRODUCCIÓN A LA MECÁNICA DEL ROBOT. Curso de Extensión. Tema 2. Laboratorio de Robótica Aplicada (LABRA) 1
 1") Curso de Extensión INTRODUCCIÓN A LA ROBÓTICA MÓVILM (LABRA) 1 Curso de Introducción n a la Robótica MóvilM Tema 2 MECÁNICA DEL ROBOT (LABRA) 2 La Capa Física: F Diseño o Mecánico Configuración de las
Curso de Extensión INTRODUCCIÓN A LA ROBÓTICA MÓVILM (LABRA) 1 Curso de Introducción n a la Robótica MóvilM Tema 2 MECÁNICA DEL ROBOT (LABRA) 2 La Capa Física: F Diseño o Mecánico Configuración de las
Agentes Inteligentes. Agentes Reflexivos RobotC. Manuel Aínza Carrillo Luis Enrique Garay Olmos Rocío García Estrada
 Agentes Inteligentes Agentes Reflexivos RobotC Manuel Aínza Carrillo AGENTES REFLEXIVOS ROBOTC 1 INTRODUCCIÓN Los ejercicios de la práctica de agentes reflexivos utilizando RobotC fueron para familiarizarnos
Agentes Inteligentes Agentes Reflexivos RobotC Manuel Aínza Carrillo AGENTES REFLEXIVOS ROBOTC 1 INTRODUCCIÓN Los ejercicios de la práctica de agentes reflexivos utilizando RobotC fueron para familiarizarnos
Robótica y Linux. Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UPSAM
 Robótica y Linux Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UPSAM III Jornadas Software Libre, UPSAM
Robótica y Linux Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UPSAM III Jornadas Software Libre, UPSAM
Pateador. una pelota. Pare ello se necesita de un actuador que mueva una estructura. mecánico similar a una pierna para que pueda patear la pelota.
 CAPÍTULO V 5.1.Introducción. Es indispensable que un robot que juega fútbol tenga la capacidad de golpear una pelota. Pare ello se necesita de un actuador que mueva una estructura mecánico similar a una
CAPÍTULO V 5.1.Introducción. Es indispensable que un robot que juega fútbol tenga la capacidad de golpear una pelota. Pare ello se necesita de un actuador que mueva una estructura mecánico similar a una
Mecanismo: Elemento destinado a transmitir y/o transformar las fuerzas o movimientos desde un elemento motriz (motor) hasta un elemento receptor.
 hasta un elemento receptor.") Mecanismo: Elemento destinado a transmitir y/o transformar las fuerzas o movimientos desde un elemento motriz (motor) hasta un elemento receptor. Finalidad: - Permiten realizar trabajos con mayor comodidad
Mecanismo: Elemento destinado a transmitir y/o transformar las fuerzas o movimientos desde un elemento motriz (motor) hasta un elemento receptor. Finalidad: - Permiten realizar trabajos con mayor comodidad
EL T EN PIEZAS. La caja de cambios empleada en los carros T-34 MONTAJE 53ª FASE
 53ª FASE EL T-34-85 EN PIEZAS En la primavera-verano del año 1942 fue desarrollada y probada la caja de cambios de 5 velocidades del carro T-34. A partir del 1 de septiembre del año 1942 comenzó su instalación
53ª FASE EL T-34-85 EN PIEZAS En la primavera-verano del año 1942 fue desarrollada y probada la caja de cambios de 5 velocidades del carro T-34. A partir del 1 de septiembre del año 1942 comenzó su instalación
Clasificación de robots. Clasificación de robots. Universidad Autónoma de Guerrero Unidad Académica de Ingeniería
 Clasificación de robots Introducción a la robótica Sesión 2: Locomoción Eric Rodríguez Peralta En la actualidad los más comunes son: Robots manipuladores Limitación para moverse en su entorno Robots móviles
Clasificación de robots Introducción a la robótica Sesión 2: Locomoción Eric Rodríguez Peralta En la actualidad los más comunes son: Robots manipuladores Limitación para moverse en su entorno Robots móviles
Mecanismos. Fundamentos para programación y robótica. Módulo 3: Fundamentos de mecánica. Capítulo 3: Mecanismos.
 Módulo 3: Fundamentos de mecánica Capítulo 3:. Objetivos: o Usar mecanismos para resolver problemas. Exposición de máquinas simples y engranajes. Vamos a buscar y analizar mecanismos en cosas cotidianas
Módulo 3: Fundamentos de mecánica Capítulo 3:. Objetivos: o Usar mecanismos para resolver problemas. Exposición de máquinas simples y engranajes. Vamos a buscar y analizar mecanismos en cosas cotidianas
TEMA 5: ROBÓTICA - MECÁNICA
 TEMA 5: ROBÓTICA - MECÁNICA La robótica es la rama de la tecnología que se dedica al diseño y construcción de robots, La robótica combina diversas materias como: mecánica, electrónica y programación e
TEMA 5: ROBÓTICA - MECÁNICA La robótica es la rama de la tecnología que se dedica al diseño y construcción de robots, La robótica combina diversas materias como: mecánica, electrónica y programación e
El engrane más común de todos. Cuando una persona piensa en engranes, piensan en engranes de espuelas.
 Engranes Los engranes son unos elementos mecánicos con mucha utilidad. Nos sirven para transmitir un movimiento giratorio de un punto a otro, obtener ventaja mecánica de un movimiento, o para convertir
Engranes Los engranes son unos elementos mecánicos con mucha utilidad. Nos sirven para transmitir un movimiento giratorio de un punto a otro, obtener ventaja mecánica de un movimiento, o para convertir
Capítulo 3 Construcción del gusano robot.
 Capítulo 3 Construcción del gusano robot. La construcción del modelo del gusano representa un reto muy importante, debido a que no existe ningún tipo de guía para la construcción, esto implica un exhaustivo
Capítulo 3 Construcción del gusano robot. La construcción del modelo del gusano representa un reto muy importante, debido a que no existe ningún tipo de guía para la construcción, esto implica un exhaustivo
QUÉ SON LOS MECANISMOS?
 QUÉ SON LOS MECANISMOS? Son elementos destinados a trasmitir y transformar fuerzas y movimientos desde un elemento motriz (motor) aun elemento receptor. Permiten realizar determinados trabajos con mayor
QUÉ SON LOS MECANISMOS? Son elementos destinados a trasmitir y transformar fuerzas y movimientos desde un elemento motriz (motor) aun elemento receptor. Permiten realizar determinados trabajos con mayor
Clasificación de los mecanismos.
 MECANISMOS - II MECANISMOS. Son elementos destinados a trasmitir y transformar fuerzas y movimientos desde un elemento motriz (motor) a un elemento receptor. Permiten al ser humano realizar determinados
MECANISMOS - II MECANISMOS. Son elementos destinados a trasmitir y transformar fuerzas y movimientos desde un elemento motriz (motor) a un elemento receptor. Permiten al ser humano realizar determinados
Es una herramienta que permite conocer detalladamente cada una de las partes de sistema de diseño VEX. Existe mucha fuente de información que puede
 Taller de Robótica Es una herramienta que permite conocer detalladamente cada una de las partes de sistema de diseño VEX. Existe mucha fuente de información que puede ser obtenida de internet para complementar
Taller de Robótica Es una herramienta que permite conocer detalladamente cada una de las partes de sistema de diseño VEX. Existe mucha fuente de información que puede ser obtenida de internet para complementar
TEMA 3: MÁQUINAS Y MECÁNICOS
 TEMA 3: MÁQUINAS Y MECÁNICOS Los mecanismos son los elementos encargados del movimiento en las máquinas. Permiten transmitir el movimiento de giro del motor a las diferentes partes del robot. el movimiento
TEMA 3: MÁQUINAS Y MECÁNICOS Los mecanismos son los elementos encargados del movimiento en las máquinas. Permiten transmitir el movimiento de giro del motor a las diferentes partes del robot. el movimiento
Datos Técnicos del Motor
 Leer el manual antes de comenzar la instalación. Si esto no se respeta, no se admitirán reclamaciones sobre la garantía. Además, esto puede afectar el funcionamiento del motor. Los niños no reconocen los
Leer el manual antes de comenzar la instalación. Si esto no se respeta, no se admitirán reclamaciones sobre la garantía. Además, esto puede afectar el funcionamiento del motor. Los niños no reconocen los
M2 - Creación Virtual de Mecanismos Planos en Maquinas v2015- Prof. Dr. José L Oliver
 6. Ejercicios de Trenes Planetarios Rectos y Cónicos. EJEMPLO 1 En la siguiente figura se presenta un tren planterio invertido. El engranaje 2 esta sujeto a su eje y es impulsado a 250 rpm en el mismo
6. Ejercicios de Trenes Planetarios Rectos y Cónicos. EJEMPLO 1 En la siguiente figura se presenta un tren planterio invertido. El engranaje 2 esta sujeto a su eje y es impulsado a 250 rpm en el mismo
CAPÍTULO VII ENSAMBLE. El procedimiento de armado de alguna máquina o componente es un punto clave en varias
 CAPÍTULO VII ENSAMBLE 7.1 Introducción El procedimiento de armado de alguna máquina o componente es un punto clave en varias áreas como son costos y funcionalidad, entre otras. Si se cuenta con dos aparatos
CAPÍTULO VII ENSAMBLE 7.1 Introducción El procedimiento de armado de alguna máquina o componente es un punto clave en varias áreas como son costos y funcionalidad, entre otras. Si se cuenta con dos aparatos
LAS MÁQUINAS. Las máquinas son ingenios inventados por el hombre para poder realizar trabajos con menor esfuerzo. Pueden clasificarse en:
 LAS MÁQUINAS Las máquinas son ingenios inventados por el hombre para poder realizar trabajos con menor esfuerzo. Pueden clasificarse en: I. TIPOS DE MÁQUINAS - Máquinas simples que están formadas por unas
LAS MÁQUINAS Las máquinas son ingenios inventados por el hombre para poder realizar trabajos con menor esfuerzo. Pueden clasificarse en: I. TIPOS DE MÁQUINAS - Máquinas simples que están formadas por unas
Universidad de Valladolid. Control y Programación de Robots. Morfología del robot: E.T.S. de Ingenieros Industriales. Estructura mecánica
 Universidad de Valladolid E.T.S. de Ingenieros Industriales Control y Programación de Robots Morfología del robot: Estructura mecánica Morfología del robot Un robot está formado por los siguientes elementos:
Universidad de Valladolid E.T.S. de Ingenieros Industriales Control y Programación de Robots Morfología del robot: Estructura mecánica Morfología del robot Un robot está formado por los siguientes elementos:
Ventaja Mecánica. Cuanto mayor sea la F o la distancia al eje de giro, mayor será el momento torsor transmitido.
 Ventaja Mecánica. Conceptos Básicos Inercia. Dificultad que opone un cuerpo para cambiar su velocidad, cuando se esta moviendo y para moverse cando esta en reposo. Fuerza. Es todo aquello que puede producir
Ventaja Mecánica. Conceptos Básicos Inercia. Dificultad que opone un cuerpo para cambiar su velocidad, cuando se esta moviendo y para moverse cando esta en reposo. Fuerza. Es todo aquello que puede producir
COLLECT AND SORT FRUIT Recoger y clasificar fruta
 World Robot Olympiad 2018 Categoría Regular WeDo (Hasta los 10 años) Descripción de la Competencia, Regla y Puntajes FOOD MATTERS COLLECT AND SORT FRUIT Recoger y clasificar fruta Versión: Enero 15 Tabla
World Robot Olympiad 2018 Categoría Regular WeDo (Hasta los 10 años) Descripción de la Competencia, Regla y Puntajes FOOD MATTERS COLLECT AND SORT FRUIT Recoger y clasificar fruta Versión: Enero 15 Tabla
Mecanismos. El tipo de movimientos que pueden producir los mecanismos son diversos: lineales, circulares, alternativos y oscilantes.
 Mecanismos 1. Introducción Desde la existencia del hombre, éste ha fabricado útiles que le ayudan en sus tareas cotidianas de supervivencia, como hachas y cuchillos. A medida que las sociedades se organizaban,
Mecanismos 1. Introducción Desde la existencia del hombre, éste ha fabricado útiles que le ayudan en sus tareas cotidianas de supervivencia, como hachas y cuchillos. A medida que las sociedades se organizaban,
DEPARTAMENTO DE TECNOLOGIA IES ANTONIO SEQUEROS TEMA 3: MECANISMOS
 TEMA 3: MECANISMOS 1. Mecanismos a. Movimiento circular en movimiento circular Ruedas de fricción Polea correa Engranajes b. Movimiento circular en movimiento lineal y viceversa Biela manivela Piñón cremallera
TEMA 3: MECANISMOS 1. Mecanismos a. Movimiento circular en movimiento circular Ruedas de fricción Polea correa Engranajes b. Movimiento circular en movimiento lineal y viceversa Biela manivela Piñón cremallera
Robots para todos con Picaxe (I) El MED1 Picaxe Walker
 El MED1 Picaxe Walker") Robots para todos con Picaxe (I) El MED1 Picaxe Walker Antes de nada quiero expresar mi gratitud a Revolution Education en el Reino Unido por un producto de excelencia. No soy experto en este campo, pero
Robots para todos con Picaxe (I) El MED1 Picaxe Walker Antes de nada quiero expresar mi gratitud a Revolution Education en el Reino Unido por un producto de excelencia. No soy experto en este campo, pero
CAPITULO VIII DISEÑO ÓPTIMO. Es necesario modificar la pieza para presentar resultados que entren en el rango
 CAPITULO VIII DISEÑO ÓPTIMO 8.1 Zonas de Modificación de la Pieza Es necesario modificar la pieza para presentar resultados que entren en el rango permitido de fuerzas. Se ha visto que ambos materiales
CAPITULO VIII DISEÑO ÓPTIMO 8.1 Zonas de Modificación de la Pieza Es necesario modificar la pieza para presentar resultados que entren en el rango permitido de fuerzas. Se ha visto que ambos materiales
MÁQUINAS SIMPLES UNIDAD 6
 MÁQUINAS SIMPLES UNIDAD 6 TECHNOLOGIES IES MIGUEL ESPINOSA 2012/2013 INDICE 1. INTRODUCCIÓN 2. LA POLEA 3. LA PALANCA 4. EL PLANO INCLINADO 5. EL TORNO 6. TRANSMISIÓN POR ENGRANAJE 7. TRANSMISIÓN POR CADENA
MÁQUINAS SIMPLES UNIDAD 6 TECHNOLOGIES IES MIGUEL ESPINOSA 2012/2013 INDICE 1. INTRODUCCIÓN 2. LA POLEA 3. LA PALANCA 4. EL PLANO INCLINADO 5. EL TORNO 6. TRANSMISIÓN POR ENGRANAJE 7. TRANSMISIÓN POR CADENA
NOTA: En los siguientes ejercicios, si no pone nada, entenderemos que es una palanca de primer grado. Recordemos la Ley de la Palanca:
 OBLIGATORIO: Realiza en todos los ejercicios un esquema del sistema. En él deben aparecer reflejados todos los datos del ejercicio. Palancas NOTA: En los siguientes ejercicios, si no pone nada, entenderemos
OBLIGATORIO: Realiza en todos los ejercicios un esquema del sistema. En él deben aparecer reflejados todos los datos del ejercicio. Palancas NOTA: En los siguientes ejercicios, si no pone nada, entenderemos
Experimento. con las alas del avión. Descubre: Qué es una polea? Qué es una manivela? Qué es el par motor?
 Experimento con las alas del avión Como ya has aprendido, los pilotos pueden realizar maniobras con la ayuda de las alas del avión. Los pilotos usan palancas y botones para cambiar la guiñada, el cabeceo
Experimento con las alas del avión Como ya has aprendido, los pilotos pueden realizar maniobras con la ayuda de las alas del avión. Los pilotos usan palancas y botones para cambiar la guiñada, el cabeceo
Sesión I: Robots en Directo
 Sesión I: Robots en Directo Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM ÍNDICE SKYBOT Robots articulados:
Sesión I: Robots en Directo Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM ÍNDICE SKYBOT Robots articulados:
Y si la niña estuviera situada a 4m del punto de apoyo?. Qué conclusión puedes sacar?.
 PROBLEMAS DE MÁQUINAS Y MECANISMOS LA PALANCA 1. Indica el tipo de palanca en cada uno de los casos siguientes: 2. A qué distancia del eje de un balancín se tendrá que sentar un niño de 30 kg para que
PROBLEMAS DE MÁQUINAS Y MECANISMOS LA PALANCA 1. Indica el tipo de palanca en cada uno de los casos siguientes: 2. A qué distancia del eje de un balancín se tendrá que sentar un niño de 30 kg para que
Los Sensores de infrarrojos hacen posible la apertura en las puertas automáticas.
 Robot Rastreador Guía Robotron Creative Los Sensores de infrarrojos hacen posible la apertura en las puertas automáticas. Vamos a aprender a cerca de los Sensores de infrarrojos y a montar un robot de
Robot Rastreador Guía Robotron Creative Los Sensores de infrarrojos hacen posible la apertura en las puertas automáticas. Vamos a aprender a cerca de los Sensores de infrarrojos y a montar un robot de
Maquinas Simples fuerzas musculares
 PALANCAS Maquinas Simples: Son dispositivos sencillos que permiten vencer grandes fuerzas musculares, en este sentido son multiplicadores de fuerzas, también permiten cambiar el sentido de la fuerza, para
PALANCAS Maquinas Simples: Son dispositivos sencillos que permiten vencer grandes fuerzas musculares, en este sentido son multiplicadores de fuerzas, también permiten cambiar el sentido de la fuerza, para
MÁQUINAS SIMPLES UNIDAD 6
 MÁQUINAS SIMPLES UNIDAD 6 TECHNOLOGIES IES MIGUEL ESPINOSA 2013/2014 INDICE 1. INTRODUCCIÓN 2. LA POLEA 3. LA PALANCA 4. EL PLANO INCLINADO 5. EL TORNO 6. TRANSMISIÓN POR ENGRANAJE 7. TRANSMISIÓN POR CADENA
MÁQUINAS SIMPLES UNIDAD 6 TECHNOLOGIES IES MIGUEL ESPINOSA 2013/2014 INDICE 1. INTRODUCCIÓN 2. LA POLEA 3. LA PALANCA 4. EL PLANO INCLINADO 5. EL TORNO 6. TRANSMISIÓN POR ENGRANAJE 7. TRANSMISIÓN POR CADENA
Máquinas y mecanismos
 Máquinas y mecanismos Las máquinas Una máquina es un conjunto de mecanismos que transforman un tipo de energía o de trabajo en energía útil. Estos mecanismos aprovechan la acción de una fuerza para producir
Máquinas y mecanismos Las máquinas Una máquina es un conjunto de mecanismos que transforman un tipo de energía o de trabajo en energía útil. Estos mecanismos aprovechan la acción de una fuerza para producir
Perro robot. Notas para el profesor
 Notas para el profesor Perro robot Diseño y tecnología Diseño de juguetes mecánicos Palancas y articulaciones Programación mecánica de acciones Poleas y engranajes Uso y combinación de componentes Ciencia
Notas para el profesor Perro robot Diseño y tecnología Diseño de juguetes mecánicos Palancas y articulaciones Programación mecánica de acciones Poleas y engranajes Uso y combinación de componentes Ciencia
Shield Dynamotion V3.0
 Shield Dynamotion V3.0 Descripción Es una shield diseñada para armar ROBOTS con arduino!, con la board Dynamotion puedes controlar dos motores DC, conectar un máximo de 6 sensores análogos, 6 sensores
Shield Dynamotion V3.0 Descripción Es una shield diseñada para armar ROBOTS con arduino!, con la board Dynamotion puedes controlar dos motores DC, conectar un máximo de 6 sensores análogos, 6 sensores
tanquetas desplazamiento de grandes cargas Referencia TP9G TP12G TP20G Código
 1.3 útiles de manutención Tanquetas profesionales 18 Toneladas Rodillos de poliamida negra con cojinetes a bolas Tanquetas delanteras giratorias robustas Tanquetas traseras unidas por una barra regulable
1.3 útiles de manutención Tanquetas profesionales 18 Toneladas Rodillos de poliamida negra con cojinetes a bolas Tanquetas delanteras giratorias robustas Tanquetas traseras unidas por una barra regulable
Iniciación a las piezas de LegoDacta [1ra parte]
![Iniciación a las piezas de LegoDacta [1ra parte]](/thumbs/83/87930577.jpg "Iniciación a las piezas de LegoDacta [1ra parte]") Iniciación a las piezas de LegoDacta [1ra parte] Este material está protegido por las leyes internacionales bajo la licencia Creative Commons. Sólo se autoriza su uso para fines didácticos de formación
Iniciación a las piezas de LegoDacta [1ra parte] Este material está protegido por las leyes internacionales bajo la licencia Creative Commons. Sólo se autoriza su uso para fines didácticos de formación
Robótica con ladrillos LEGO
 Robótica con ladrillos LEGO José María Cañas Plaza jmplaza@gsyc.escet.urjc.es Abril 2003 Índice del curso 1 Índice del curso Introducción Elementos del kit Programación con código RCX Programación con
Robótica con ladrillos LEGO José María Cañas Plaza jmplaza@gsyc.escet.urjc.es Abril 2003 Índice del curso 1 Índice del curso Introducción Elementos del kit Programación con código RCX Programación con
EQUILIBRIO DE UN CUERPO RÍGIDO BAJO LA ACCIÓN DE FUERZAS COPLANARES.
 EQUILIBRIO DE UN CUERPO RÍGIDO BAJO LA ACCIÓN DE FUERZAS COPLANARES. LA TORCA (O MOMENTUM) alrededor de un eje, debida a una fuerza, es una medida de la efectividad de la fuerza para que esta produzca
EQUILIBRIO DE UN CUERPO RÍGIDO BAJO LA ACCIÓN DE FUERZAS COPLANARES. LA TORCA (O MOMENTUM) alrededor de un eje, debida a una fuerza, es una medida de la efectividad de la fuerza para que esta produzca
Sistemas de transmisión Mecánica. Ingenieria Hidroneumatica y Capacitacion S.A. de C.V.
 Sistemas de transmisión Mecánica OBJETIVOS Mostrar las ventajas y desventajas, de los diferentes arreglos de transmisión n de potencia mecánica, conducidos por motores eléctricos. Los consumos de energía
Sistemas de transmisión Mecánica OBJETIVOS Mostrar las ventajas y desventajas, de los diferentes arreglos de transmisión n de potencia mecánica, conducidos por motores eléctricos. Los consumos de energía
2. Introducción a las Flechas Cardan.
 Capítulo 2 Capítulo 2 2. Introducción a las Flechas Cardan. Las flechas cardan son aquellas encargadas para transmitir la potencia de la transmisión hacia la parte posterior del vehiculo. Las flechas cardán
Capítulo 2 Capítulo 2 2. Introducción a las Flechas Cardan. Las flechas cardan son aquellas encargadas para transmitir la potencia de la transmisión hacia la parte posterior del vehiculo. Las flechas cardán
CAPITULO II ANTECEDENTES. La bomba de aceite actual del motor EA 116 de Volkswagen, funciona por medio de la
 3 CAPITULO II ANTECEDENTES 2.1 Introducción. La bomba de aceite actual del motor EA 116 de Volkswagen, funciona por medio de la transmisión de potencia del cigüeñal a la bomba, esto gracias a que esta
3 CAPITULO II ANTECEDENTES 2.1 Introducción. La bomba de aceite actual del motor EA 116 de Volkswagen, funciona por medio de la transmisión de potencia del cigüeñal a la bomba, esto gracias a que esta
Robótica en la Universidad
 Robótica en la Universidad Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Semana de la Ciencia, UPSAM
Robótica en la Universidad Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Semana de la Ciencia, UPSAM
1. Palanca 2. Poleas: Polea simple o fija Polea móvil Polipastos
 1. Palanca 2. Poleas: Polea simple o fija Polea móvil Polipastos Una palanca es una máquina constituida por una barra simple que puede girar en torno a un punto de apoyo o fulcro. Según donde se aplique
1. Palanca 2. Poleas: Polea simple o fija Polea móvil Polipastos Una palanca es una máquina constituida por una barra simple que puede girar en torno a un punto de apoyo o fulcro. Según donde se aplique
Área: EDUCACION TECNOLOGICA Asignatura: TECNOLOGIA II. Título TRANSMISIONES MECANICAS. Curso 2 AÑO Año: Pag.1/15
 Área: EDUCACION TECNOLOGICA Asignatura: TECNOLOGIA II Título TRANSMISIONES MECANICAS Curso 2 AÑO Año: 2006 Pag.1/15 INTRODUCCION Desde tiempos inmemorables el hombre realizó grandes esfuerzos para las
Área: EDUCACION TECNOLOGICA Asignatura: TECNOLOGIA II Título TRANSMISIONES MECANICAS Curso 2 AÑO Año: 2006 Pag.1/15 INTRODUCCION Desde tiempos inmemorables el hombre realizó grandes esfuerzos para las
Engranaje Conducido. Se logra hacer girar un engranaje conducido en el mismo sentido que el motor añadiendo otro, denominado loco, entre ellos.
 Son ruedas dentadas que se acoplan entre semejante para transmitir eficientemente movimiento y fuerza. En la combinación de dos engranajes se denominan motor al que aporta la fuerza de entrada, proveniente
Son ruedas dentadas que se acoplan entre semejante para transmitir eficientemente movimiento y fuerza. En la combinación de dos engranajes se denominan motor al que aporta la fuerza de entrada, proveniente
Mecanismos: Ejes y Ruedas
 Mecanismos: Ejes y Ruedas Propósito: Conoce la taxonomía de los robots según su locomoción Si una persona es perseverante, aunque sea dura de entendimiento, se hará inteligente; y aunque sea débil se transformará
Mecanismos: Ejes y Ruedas Propósito: Conoce la taxonomía de los robots según su locomoción Si una persona es perseverante, aunque sea dura de entendimiento, se hará inteligente; y aunque sea débil se transformará
Cómo hacer un amigurumi con forma de flor (Daisy the Flower)!
!") Cómo hacer un amigurumi con forma de flor (Daisy the Flower) Por/Foto Sanda J. Dobrosavljev Los amigurumis de Sanda se caracterizan por humanizar los rasgos de objetos inanimados o animales. En este caso
Cómo hacer un amigurumi con forma de flor (Daisy the Flower) Por/Foto Sanda J. Dobrosavljev Los amigurumis de Sanda se caracterizan por humanizar los rasgos de objetos inanimados o animales. En este caso
4 Actuadores eléctricos. Alfaomega. Material Web. Arduino control de servomotores a pasos 2
 4 Actuadores eléctricos Capítulo Material Web Arduino control de servomotores a pasos 2 2 Actuadores eléctricos 4.1. 4.1 Arduino control de servomotores a pasos Un servomotor de pasos es un sistema formado
4 Actuadores eléctricos Capítulo Material Web Arduino control de servomotores a pasos 2 2 Actuadores eléctricos 4.1. 4.1 Arduino control de servomotores a pasos Un servomotor de pasos es un sistema formado
FICHA ESTÁNDAR DE FAMILIA DEL CATÁLOGO DE BIENES, SERVICIOS Y OBRAS DEL MEF FICHA ESTÁNDAR N 133
 PERÚ Ministerio de Economía y Finanzas Oficina General de Tecnologías de la Información FICHA ESTÁNDAR DE FAMILIA DEL CATÁLOGO DE BIENES, SERVICIOS Y OBRAS DEL MEF FICHA ESTÁNDAR N 133 FAMILIA 94080011
PERÚ Ministerio de Economía y Finanzas Oficina General de Tecnologías de la Información FICHA ESTÁNDAR DE FAMILIA DEL CATÁLOGO DE BIENES, SERVICIOS Y OBRAS DEL MEF FICHA ESTÁNDAR N 133 FAMILIA 94080011
1. Indica a los alumnos qué material deben tomar para armar su proyecto. A continuación se especifican los tipos y cantidades.
 Objetivo: Comprender cómo intervienen los engranes para aumentar o disminuir la velocidad de rotación de objetos. Contenido: Engranajes. Material 1. Indica a los alumnos qué material deben tomar para armar
Objetivo: Comprender cómo intervienen los engranes para aumentar o disminuir la velocidad de rotación de objetos. Contenido: Engranajes. Material 1. Indica a los alumnos qué material deben tomar para armar
INSTITUTO TECNOLÓGICO DE VERACRUZ. Materia: ROBOTICA. Unidad 1 MORFOLOGÍA DEL ROBOT. Tema: 1.3 TRANSMISIONES Y REDUCCIONES
 INSTITUTO TECNOLÓGICO DE VERACRUZ Materia: ROBOTICA Unidad 1 MORFOLOGÍA DEL ROBOT Tema: 1.3 TRANSMISIONES Y REDUCCIONES Catedrático: ING. José Antonio Garrido Natarén H. Veracruz, Ver. 01 de Septiembre
INSTITUTO TECNOLÓGICO DE VERACRUZ Materia: ROBOTICA Unidad 1 MORFOLOGÍA DEL ROBOT Tema: 1.3 TRANSMISIONES Y REDUCCIONES Catedrático: ING. José Antonio Garrido Natarén H. Veracruz, Ver. 01 de Septiembre
Simulador de Realidad Virtual de HDD para Capacitación. Guía para Localización de Averías de Controles V002
 Simulador de Realidad Virtual de HDD para Capacitación Guía para Localización de Averías de Controles V002 Contenido 1. Introducción... 3 2. Descripción de piezas... 3 3. Conexiones del alambrado y alimentación
Simulador de Realidad Virtual de HDD para Capacitación Guía para Localización de Averías de Controles V002 Contenido 1. Introducción... 3 2. Descripción de piezas... 3 3. Conexiones del alambrado y alimentación
TEMA 6 LOS MECANISMOS
 TEMA 6 LOS MECANISMOS 1. MÁQUINAS SIMPLES. MECANISMOS DE TRANSMISIÓN LINEAL Para ahorrar esfuerzo en la realización de diversas tareas, el ser humano ha inventado artilugios como la palanca o polea. Estos
TEMA 6 LOS MECANISMOS 1. MÁQUINAS SIMPLES. MECANISMOS DE TRANSMISIÓN LINEAL Para ahorrar esfuerzo en la realización de diversas tareas, el ser humano ha inventado artilugios como la palanca o polea. Estos
BOLETÍN TÉCNICO. Categoría Modelos No. Control. No funciona el mecanismo de CD, No reproduce los CD s.
 1. Descripción del Problema Síntomas No funciona el mecanismo de CD, No reproduce los CD s. Fallas Polvo en el mecanismo de CD (MECHANICAL, CD) o en la sección del bloque óptico (Base ASSY OP, KSM-213D)
1. Descripción del Problema Síntomas No funciona el mecanismo de CD, No reproduce los CD s. Fallas Polvo en el mecanismo de CD (MECHANICAL, CD) o en la sección del bloque óptico (Base ASSY OP, KSM-213D)
Fricción. Fricción estática y cinética. Si las superficies en contacto presentan o no movimiento relativo, las fuerzas friccionales son diferentes.
 Fricción. Cuando dos superficies se tocan se ejercen fuerzas entre ellas. La fuente primordial de estas fuerzas superficiales o de contacto es la atracción o repulsión eléctrica entre las partículas cargadas
Fricción. Cuando dos superficies se tocan se ejercen fuerzas entre ellas. La fuente primordial de estas fuerzas superficiales o de contacto es la atracción o repulsión eléctrica entre las partículas cargadas
Visión artificial y Robótica Modelos de movimiento y mapas. Depto. de Ciencia de la Computación e Inteligencia Artificial
 Visión artificial y Robótica Modelos de movimiento y mapas Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Sistemas de coordenadas Localización de objetos en el espacio Modelos
Visión artificial y Robótica Modelos de movimiento y mapas Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Sistemas de coordenadas Localización de objetos en el espacio Modelos
GRUPO 26. IVÁN DÍAZ CHACÓN JOSÉ JAIME ARIZA LUÍS ZAVARGO PECHE
 GRUPO 26 IVÁN DÍAZ CHACÓN (malake@clientes.unicaja.es) JOSÉ JAIME ARIZA (jariza@mixmail.com) LUÍS ZAVARGO PECHE (zavargo@terra.es) 3º A ÍNDICE 1.- Funcionalidades y especificaciones... pág 1. 1.1.- Suplementos
GRUPO 26 IVÁN DÍAZ CHACÓN (malake@clientes.unicaja.es) JOSÉ JAIME ARIZA (jariza@mixmail.com) LUÍS ZAVARGO PECHE (zavargo@terra.es) 3º A ÍNDICE 1.- Funcionalidades y especificaciones... pág 1. 1.1.- Suplementos
Robot recolector de escombros
 DESCRIPCIÓN Descripción Lección 2 Robot recolector de escombros En esta práctica se realizará un robot móvil con orugas utilizado en zonas de desastres cuya función es recolectar escombros y despejar áreas
DESCRIPCIÓN Descripción Lección 2 Robot recolector de escombros En esta práctica se realizará un robot móvil con orugas utilizado en zonas de desastres cuya función es recolectar escombros y despejar áreas
Fundamentos para programación y robótica Módulo 2 Programación y robótica Capítulo 3 TortuBots y NXT
 Módulo 2 Programación y robótica Capítulo 3 Agenda Generalidades sobre el kit Lego NXT Conceptos básicos de Lego NXT Operando el NXT con TortuBots Objetivos Aprender sobre el kit y familiarizarse con el
Módulo 2 Programación y robótica Capítulo 3 Agenda Generalidades sobre el kit Lego NXT Conceptos básicos de Lego NXT Operando el NXT con TortuBots Objetivos Aprender sobre el kit y familiarizarse con el
Un mecanismo es un dispositivo que transforma el producido por un elemento (fuerza de ) en un movimiento deseado de (fuerza de ) llamado elemento.
 en un movimiento deseado de (fuerza de ) llamado elemento.") MECANISMOS 2º ESO A. Introducción. Un mecanismo es un dispositivo que transforma el producido por un elemento (fuerza de ) en un movimiento deseado de (fuerza de ) llamado elemento. Elemento motriz Elemento
MECANISMOS 2º ESO A. Introducción. Un mecanismo es un dispositivo que transforma el producido por un elemento (fuerza de ) en un movimiento deseado de (fuerza de ) llamado elemento. Elemento motriz Elemento
TECNOLOGICO NACIONAL DE MEXICO
 TECNOLOGICO NACIONAL DE MEXICO INSTITUTO TECNOLOGICO DE VERACRUZ ROBOTICA CLAVE 9F1A DR. JOSE ANTONIO GARRIDO NATAREN ING. MECATRONICA EQUIPO I UNIDAD I MORFOLOGIA DEL ROBOT 1.3 TRANSMISIONES Y REDUCCIONES
TECNOLOGICO NACIONAL DE MEXICO INSTITUTO TECNOLOGICO DE VERACRUZ ROBOTICA CLAVE 9F1A DR. JOSE ANTONIO GARRIDO NATAREN ING. MECATRONICA EQUIPO I UNIDAD I MORFOLOGIA DEL ROBOT 1.3 TRANSMISIONES Y REDUCCIONES
LECCIÓN. 19 Reductores de velocidad
 108 LECCIÓN. 19 Reductores de velocidad Competencia. Construye y utiliza un sistema de frenado. Indicador. Interpreta resultados de sistema de frenado. INTRODUCCIÓN Toda máquina Cuyo movimiento sea generado
108 LECCIÓN. 19 Reductores de velocidad Competencia. Construye y utiliza un sistema de frenado. Indicador. Interpreta resultados de sistema de frenado. INTRODUCCIÓN Toda máquina Cuyo movimiento sea generado
BLOQUE 2. OPERADORES MECÁNICOS
 BLOQUE 2. OPERADORES MECÁNICOS 1. INTRODUCCIÓN Hay muchas maneras de definir una máquina. Nosotros vamos a usar la siguiente definición: Máquina: es el conjunto de mecanismos (operadores mecánicos) capaz
BLOQUE 2. OPERADORES MECÁNICOS 1. INTRODUCCIÓN Hay muchas maneras de definir una máquina. Nosotros vamos a usar la siguiente definición: Máquina: es el conjunto de mecanismos (operadores mecánicos) capaz
Descripción técnica Kit de Robótica
 Ficha de Inventario 1:1 3 6 8 2 2 2008 The LEGO Group. 4537292 c Descripción técnica Kit de Robótica El kit de Robótica Educativa WeDo está compuesto por elementos de construcción, componentes electrónicos
Ficha de Inventario 1:1 3 6 8 2 2 2008 The LEGO Group. 4537292 c Descripción técnica Kit de Robótica El kit de Robótica Educativa WeDo está compuesto por elementos de construcción, componentes electrónicos
Sistema Freno de Aire Pág.
 Sistema Freno de Aire Pág. Actuadores Descripción... 3 Actuadores... 4 Tipos de Válvulas Descripción... 5-6 Válvulas del Freno Pedal... 7 Válvulas del Freno Palancas... 8 Válvulas del Freno Relé... 9 Tensores
Sistema Freno de Aire Pág. Actuadores Descripción... 3 Actuadores... 4 Tipos de Válvulas Descripción... 5-6 Válvulas del Freno Pedal... 7 Válvulas del Freno Palancas... 8 Válvulas del Freno Relé... 9 Tensores
RECOLECTAR Y ORDENAR ALIMENTOS
 Olimpiada Científica Estudiantil Plurinacional Boliviana World Robot Olympiad 2018 Categoría Inicial Descripción del juego, reglas y puntaje GESTION DE ALIMENTOS RECOLECTAR Y ORDENAR ALIMENTOS Versión:
Olimpiada Científica Estudiantil Plurinacional Boliviana World Robot Olympiad 2018 Categoría Inicial Descripción del juego, reglas y puntaje GESTION DE ALIMENTOS RECOLECTAR Y ORDENAR ALIMENTOS Versión:
GRIP LOCK CHOCK (GLC)
") GRIP LOCK CHOCK (GLC) ENERO 2012 NOMENCLATURA CONCEPTO GENERAL Un sistema de ocho (8) chocks compuesto de cuatro (4) chocks izquierdos y (4) derechos. El cuerpo del chock es negro. El Chock Izquierdo posee
GRIP LOCK CHOCK (GLC) ENERO 2012 NOMENCLATURA CONCEPTO GENERAL Un sistema de ocho (8) chocks compuesto de cuatro (4) chocks izquierdos y (4) derechos. El cuerpo del chock es negro. El Chock Izquierdo posee
Percepción visual aplicada a la robótica
 Percepción visual aplicada a la robótica Mario I. Chacón Murguía Rafael Sandoval Rodríguez Javier Vega Pineda Selecciona el libro para empezar Capítulo 2 Teoría de robótica Continuar Cinemática de robots
Percepción visual aplicada a la robótica Mario I. Chacón Murguía Rafael Sandoval Rodríguez Javier Vega Pineda Selecciona el libro para empezar Capítulo 2 Teoría de robótica Continuar Cinemática de robots
Práctica 14 Movimiento del robot Fanuc M16i usando el método JOINT
 Práctica 14 Movimiento del robot Fanuc M16i usando el método JOINT Objetivo Conocimiento sobre el robot FANUC M16i e interactuar con él, por medio del método de movimiento JOINT. Preguntas detonantes 1)
Práctica 14 Movimiento del robot Fanuc M16i usando el método JOINT Objetivo Conocimiento sobre el robot FANUC M16i e interactuar con él, por medio del método de movimiento JOINT. Preguntas detonantes 1)
#1705. Instructivo. Lee tu instructivo antes de comenzar a jugar para obtener mejores resultados; consérvalo a la mano para futuras referencias.
 #1705 Instructivo Lee tu instructivo antes de comenzar a jugar para obtener mejores resultados; consérvalo a la mano para futuras referencias. INTRODUCCIÓN Arma tu propio mini robot, dinosaurio, máquina
#1705 Instructivo Lee tu instructivo antes de comenzar a jugar para obtener mejores resultados; consérvalo a la mano para futuras referencias. INTRODUCCIÓN Arma tu propio mini robot, dinosaurio, máquina
Sistemas de Tracción
 Sistemas de Tracción Tracción Normal (4x2) La transmisión de los coches normales lleva la fuerza del motor hacia las llantas traseras o delanteras. Tracción Delantera Tracción Trasera Ambos sistemas requieren
Sistemas de Tracción Tracción Normal (4x2) La transmisión de los coches normales lleva la fuerza del motor hacia las llantas traseras o delanteras. Tracción Delantera Tracción Trasera Ambos sistemas requieren
2º E.S.O. INDICE 1. QUE SON LOS MECANISMOS 2. CLASIFICACION DE LOS MECANISMOS 2.1. MECANISMOS DE TRASMISION DE MOVIMIENTO
 1. QUE SON LOS MECANISMOS INDICE 2. CLASIFICACION DE LOS MECANISMOS 2.1. MECANISMOS DE TRASMISION DE MOVIMIENTO 2.2 MECANISMOS DE TRANSFORMACION DE MOVIMIENTO 2º E.S.O. TECNOLOGÍA - 2º ESO TEMA 5: LOS
1. QUE SON LOS MECANISMOS INDICE 2. CLASIFICACION DE LOS MECANISMOS 2.1. MECANISMOS DE TRASMISION DE MOVIMIENTO 2.2 MECANISMOS DE TRANSFORMACION DE MOVIMIENTO 2º E.S.O. TECNOLOGÍA - 2º ESO TEMA 5: LOS
Cuaderno de recuperación de tecnologías
 Cuaderno de recuperación de tecnologías 2ª EVALUACIÓN TEMA 1: LA ARQUITECTURA DEL ORDENADOR. 1) Qué es un sistema informático?. 2) Qué es la memoria ROM?, Qué significa ROM?. 3) Para qué sirve y cómo se
Cuaderno de recuperación de tecnologías 2ª EVALUACIÓN TEMA 1: LA ARQUITECTURA DEL ORDENADOR. 1) Qué es un sistema informático?. 2) Qué es la memoria ROM?, Qué significa ROM?. 3) Para qué sirve y cómo se
PRACTICA N 3 ADQUISICIÓN DE DATOS DE TEMPERATURA Y VELOCIDAD
 PRACTICA N 3 ADQUISICIÓN DE DATOS DE TEMPERATURA Y VELOCIDAD Fecha de entrega: 28 de septiembre Durante la realización de esta práctica el estudiante debe familiarizarse con el uso de dos tipos de sensores:
PRACTICA N 3 ADQUISICIÓN DE DATOS DE TEMPERATURA Y VELOCIDAD Fecha de entrega: 28 de septiembre Durante la realización de esta práctica el estudiante debe familiarizarse con el uso de dos tipos de sensores:
BUEN MANTENIMIENTO = MEJOR RENDIMIENTO
 1 Consejos prácticos CARGA Y BATERÍA - Almacene el robot conectado a la red eléctrica. Roomba es un robot de uso diario por lo que siempre debe estar listo para su uso. La batería siempre ha de estar cargada
1 Consejos prácticos CARGA Y BATERÍA - Almacene el robot conectado a la red eléctrica. Roomba es un robot de uso diario por lo que siempre debe estar listo para su uso. La batería siempre ha de estar cargada
CURSO: ROBÓTICA EDUCATIVA CON LEGO MINDSTORMS Estudiantes de 8 a 9 años
 CURSO: ROBÓTICA EDUCATIVA CON LEGO MINDSTORMS Estudiantes de 8 a 9 años Descripción del curso: En cada clase se realiza un reto lúdico, donde el alumno explora y experimenta con las piezas Lego MindStorms,
CURSO: ROBÓTICA EDUCATIVA CON LEGO MINDSTORMS Estudiantes de 8 a 9 años Descripción del curso: En cada clase se realiza un reto lúdico, donde el alumno explora y experimenta con las piezas Lego MindStorms,
SISTEMA DE TRANSMISIÓN PARA VEHÍCULO CON TRACCIÓN TRASERA Y MOTOR DELANTERO DOCUMENTO 8: RESUMEN
 eman ta zabal zazu ESCUELA UNIVERSITARIA DE INGENIERÍA TÉCNICA INDUSTRIAL DE BILBAO GRADO EN MECÁNICA TRABAJO FIN DE GRADO 2014 / 2015 SISTEMA DE TRANSMISIÓN PARA VEHÍCULO CON TRACCIÓN TRASERA Y MOTOR
eman ta zabal zazu ESCUELA UNIVERSITARIA DE INGENIERÍA TÉCNICA INDUSTRIAL DE BILBAO GRADO EN MECÁNICA TRABAJO FIN DE GRADO 2014 / 2015 SISTEMA DE TRANSMISIÓN PARA VEHÍCULO CON TRACCIÓN TRASERA Y MOTOR
Inventario de piezas LEGO
 Inventario de piezas LEGO Clip color negro Media clavija color gris Media clavija color gris oscuro ½ bisagra color negro Bisagra con 2 broches color negro Clavija-Eje color gris Buje color gris Bisagra
Inventario de piezas LEGO Clip color negro Media clavija color gris Media clavija color gris oscuro ½ bisagra color negro Bisagra con 2 broches color negro Clavija-Eje color gris Buje color gris Bisagra
MANUAL DEL ESTUDIANTE
 MANUAL DEL ESTUDIANTE Manual para el ESTUDIANTE TALLER DE ROBÓTICA Enlaces, Centro de Educación y Tecnología www.enlaces.cl Ministerio de Educación www.mineduc.cl Autor: José Ignacio Fernández Cofré Angélica
MANUAL DEL ESTUDIANTE Manual para el ESTUDIANTE TALLER DE ROBÓTICA Enlaces, Centro de Educación y Tecnología www.enlaces.cl Ministerio de Educación www.mineduc.cl Autor: José Ignacio Fernández Cofré Angélica
3.4. Sensores de Velocidad y Movimiento.
 3.4. Sensores de Velocidad y Movimiento. Los sensores tacométricos, se encargan de medir la velocidad angular. Estos miden la frecuencia de impulsos de cualquier tipo de señal, que generalmente es de tipo
3.4. Sensores de Velocidad y Movimiento. Los sensores tacométricos, se encargan de medir la velocidad angular. Estos miden la frecuencia de impulsos de cualquier tipo de señal, que generalmente es de tipo
Módulo: Mecánica. Construyendo para el Mundo
 Módulo: Mecánica Construyendo para el Mundo 1. MECANISMOS Las poleas son útiles para mover objetos pesados aplicando una menor fuerza, pero la transmisión de movimiento hace referencia al uso de una correa.
Módulo: Mecánica Construyendo para el Mundo 1. MECANISMOS Las poleas son útiles para mover objetos pesados aplicando una menor fuerza, pero la transmisión de movimiento hace referencia al uso de una correa.
1. Introducción TRABAJO, ENERGÍA, POTENCIA Y RENDIMIENTO Trabajo, energía y rendimiento MECANISMOS QUE TRANSFORMAN
 Mecanismos I Tecnología 3º ESO 1. Introducción.... 2 2. TRABAJO, ENERGÍA, POTENCIA Y RENDIMIENTO... 3 2.1 Trabajo, energía y rendimiento...3 3. MECANISMOS QUE TRANSFORMAN MOVIMIENTOS RECTILÍNEOS EN MOVIMIENTOS
Mecanismos I Tecnología 3º ESO 1. Introducción.... 2 2. TRABAJO, ENERGÍA, POTENCIA Y RENDIMIENTO... 3 2.1 Trabajo, energía y rendimiento...3 3. MECANISMOS QUE TRANSFORMAN MOVIMIENTOS RECTILÍNEOS EN MOVIMIENTOS
GLOSARIO DE TÉRMINOS
 GLOSARIO DE TÉRMINOS Términos en orden alfabético CABINA - Alojamiento de protección del conductor y pasajeros que integra los controles de la unidad. CAJA DE VELOCIDADES - Componente engranado o de turbina
GLOSARIO DE TÉRMINOS Términos en orden alfabético CABINA - Alojamiento de protección del conductor y pasajeros que integra los controles de la unidad. CAJA DE VELOCIDADES - Componente engranado o de turbina
TEMA 6 ESTRUCTURAS Y MÁQUINAS
 1. ESTRUCTURAS TEMA 6 ESTRUCTURAS Y MÁQUINAS Qué es una estructura? - Estructura: conjunto de elementos capaces de (que pueden) soportar (aguantar) fuerzas y de proteger los objetos o las máquinas a los
1. ESTRUCTURAS TEMA 6 ESTRUCTURAS Y MÁQUINAS Qué es una estructura? - Estructura: conjunto de elementos capaces de (que pueden) soportar (aguantar) fuerzas y de proteger los objetos o las máquinas a los
Los dientes de los engranajes: 1.- Impiden el deslizamiento lo que a su vez permite que los ejes que giran con un sistema de engranajes, puedan estar
 Qué es un engranaje? Un engranaje es una rueda dentada Los engranajes se unen unos a otros por sus dientes (transmisión directa) o a través de una cadena, formando así un sistema transmisor del movimiento.
Qué es un engranaje? Un engranaje es una rueda dentada Los engranajes se unen unos a otros por sus dientes (transmisión directa) o a través de una cadena, formando así un sistema transmisor del movimiento.
EJERCICIOS DE PALANCAS
 IES Los Neveros Dpto. Tecnología EJERCICIOS DE MÁQUINAS SIMPLES 2º DE ESO Nombre:... Grupo:... Fecha:... NOTA EJERCICIOS DE PALANCAS ACLARACIONES: En cada ejercicio se ha de dibujar la figura correspondiente
IES Los Neveros Dpto. Tecnología EJERCICIOS DE MÁQUINAS SIMPLES 2º DE ESO Nombre:... Grupo:... Fecha:... NOTA EJERCICIOS DE PALANCAS ACLARACIONES: En cada ejercicio se ha de dibujar la figura correspondiente
Capítulo 6: Modelo de robot:
 Capítulo 6: Modelo de robot: 1. Descripción del modelo monociclo Un modelo cinemático aportará las bases necesarias para describir el movimiento de un móvil en función de la velocidad y aceleración del
Capítulo 6: Modelo de robot: 1. Descripción del modelo monociclo Un modelo cinemático aportará las bases necesarias para describir el movimiento de un móvil en función de la velocidad y aceleración del
-EXPRESIÓN GRÁFICA :1, 2 5. : 2 1: , 1:50 : ELECTRICIDAD BÁSICA
 -EXPRESIÓN GRÁFICA 1. Tipo de escala a la que representarías un coche: 2. Perspectiva en la que se aplica un coeficiente de reducción para corregir la deformación en la representación: 3. Al representar
-EXPRESIÓN GRÁFICA 1. Tipo de escala a la que representarías un coche: 2. Perspectiva en la que se aplica un coeficiente de reducción para corregir la deformación en la representación: 3. Al representar