APUNTES DE LA ASIGNATURA SISTEMAS ELECTRÓNICOS DE CONTROL CURSO 2008/2009
|
|
|
- Juana Herrera Acuña
- hace 6 años
- Vistas:
Transcripción
1 APUNTES DE LA ASIGNATURA SISTEMAS ELECTRÓNICOS DE CONTROL CURSO 8/9 CURSO 3º INGENIERÍA TÉCNICA DE TELECOMUNCICACIÓN SISTEMAS ELECTRÓNICOS JOSÉ CANDAU PÉREZ FCO. JAVIER GARCÍA RUIZ EDUARDO J. MOYA DE LA TORRE Dpto. Ingeniería de Sitema y Automática EUP. Univeridad de Valladolid C/Francico Mendizábal, nº Valladolid 474
2 Tema Introducción al Control Automático.. El concepto de itema dinámico.. Sitema de control: objetivo. 3. Control en lazo abierto y en lazo cerrado. 4. Efecto de la realimentación. 5. Fae en la contrucción de un itema de control. 6. Claificación de lo itema de control. 7. Elemento que componen un itema.
3 - El concepto de Sitema Dinámico. Un itema e un dipoitivo, objeto, ente, donde e manifieta una relación caua-efecto. Un itema dinámico e aquel en el cual lo efecto actuale (alida on el reultado de caua actuale y previa (entrada. En todo itema dinámico e puede advertir, un conjunto de entrada que actúan obre él, un conjunto de alida, motivada por la entrada y una obervacione de la repueta obtenida por lo enore. La entrada pueden er determinita, e decir eñale elegida a voluntad por el uuario y que e uelen uar para controlar el itema. Y pueden er perturbacione, actuando obre el itema de forma impredecible, contaminando tanto la entrada como la alida. Se uelen coniderar perturbacione al ruido, y también a errore en el modelado del itema.
4 A un itema e le puede aignar también un etado: Conjunto de propiedade relevante que poee dicho itema en un intante dado y que en un itema dinámico reume la evolucione pretérita del mimo. El conocimiento del etado de un itema, junto con la entrada que actúan obre él, deben ervirno para determinar u comportamiento futuro. w v Perturbación de la entrada Perturbación de la alida u Entrada determinita SISTEMA Etado X y y Senor Salida z Obervación 3
5 - Sitema de control. Un itema de control e puede definir como un conjunto de elemento interconectado que logran que el itema proporcione la repueta deeada. Ea repueta deeada, el objetivo, varía egún el itema: mantener un valor determinado, alcanzarlo con la mayor velocidad, con la mayor preciión, de forma bruca o con uavidad... 4
6 3. Control en lazo abierto y lazo cerrado Un itema de control en lazo abierto e aquel en el que la acción de control e independiente de la alida. Ejemplo: Totadora automática. ENTRADA ACCIÓN DE CONTROL (TIEMPO DE COCCIÓN SISTEMA (TOSTADORA SALIDA (PRODUCTO 5
7 Un itema de control de lazo cerrado e aquel en el que la acción de control no e independiente de la alida. A eto itema e le denomina también Sitema Realimentado. Ejemplo: Citerna. ENTRADA (NIVEL DESEADO ACCIÓN DE CONTROL SISTEMA SALIDA (NIVEL REAL 6
8 4. Efecto de la realimentación. Realimentación e la propiedad de lo itema de lazo cerrado que permite que la alida e compare con la entrada del itema de tal manera que la acción de control apropiada e pueda formar como alguna función que dependa de la entrada y la alida. La realimentación preenta lo iguiente efecto:. Diminuye el error entre la entrada(referencia y la alida.. Se reduce la enibilidad de la alida frente a la perturbacione: ruido y variacione en lo parámetro del itema. 3. Produce una tendencia hacia la ocilación y la inetabilidad 4. Se reduce el efecto de la no linealidade. 5. Se aumenta el ancho de banda, que e una medida de cómo reponde (filtra el itema a la variacione (frecuencia de la eñal de entrada. 7
9 5. Fae en la contrucción de un itema de control. E habitual ditinguir diferente etapa en la contrucción del itema: modelado, análii, dieño e implantación. 8
10 I.- Modelado Conite en dearrollar un modelo matemático que repreente la ituación fíica del proceo que e conidera y u comportamiento en el tiempo. Si el modelo no e correcto, la manipulacione iguiente erán inútile; pero i el modelo e muy complejo, la realización de la fae iguiente puede er inabordable. Para obtener dicho modelo e emplean do técnica fundamentalmente: Modelado a partir de la leye fíica y química. Se contruye un modelo matemático a partir del conocimiento teórico de dicho itema. Identificación. Se contruye un modelo matemático a partir de obervacione del comportamiento del itema al ometerlo a entrada previamente elegida. En el modelo matemático obtenido de eta forma lo parámetro utilizado no tienen ningún entido fíico, y el modelo no e ecalable. Un modelo debe cumplir do condicione: - Reflejar el comportamiento dinámico del itema. - Debe er uceptible de un tratamiento eficaz y provechoo. Se requerirá un compromio entre exactitud del modelo y facilidad de manejo. 9
11 II.- Análii. En eta fae e etudia cómo e comporta el itema. Se puede etudiar dede do punto de vita: - Cualitativo: No da información obre alguna cualidad del itema. Por ejemplo: Etabilidad - Cuantitativo: No da información exacta de la alida del itema. III.- Dieño. Se buca calcular la función de control adecuada para que el itema e ajute a la neceidade de funcionamiento. IV.- Implantación. Conite en la realización fíica de la función de control obtenida. Eto no obliga a que en el dieño e debe tratar de encontrar una función de control que ea realizable fíicamente.
12 6. Claificación de lo Sitema de Control. Hay diferente criterio para claificar lo itema de control. a Según la caracterítica del itema: Mecánico, eléctrico, químico, etc. b En Lazo Abierto o en Lazo cerrado. c Lineale o no lineale. Dependiendo de i el modelo que repreenta el itema e lineal o no. En general todo lo itema on no lineale. Pero alguno preentan una no linealidade pequeña, que pueden depreciare in que el modelo deje de er válido. En otro cao la no linealidade on útile. Por ejemplo el Control Todo- Nada. En general lo itema no lineale van a er difícile de manejar matemáticamente, por lo que en cada cao e uele utilizar un modelo linealizado.
13 d Sitema variante o invariante en el tiempo. En lo itema invariante en el tiempo, lo parámetro del itema no varían en el tiempo y en lo variante i. dx( t Por ejemplo, un itema cuyo modelo e a ( t x( t y( t e un ejemplo de dt ecuación diferencial de parámetro variante en el tiempo. e Según el tipo de eñale empleada en el itema pueden er Continuo o Dicreto. En lo primero la eñale on continua en el tiempo. En lo Dicreto la eñale en algún punto del itema on dicontinua. Según el número de eñale de entrada-alida (SISO, MISO, MIMO
14 7 Elemento que componen un itema. Lo elemento fundamentale de un itema realimentado on lo que e muetran en el equema. En él aparecen elemento fíico y eñale Error de referencia Acción de control Variable manipulada Referencia (entrada Controlador Detector de error Manipulador Gm - Gc Gp Valor medido de la variable controlada H Senor Perturbacione Planta (proceo Variable Controlada (alida 3
15 Como elemento má importante Planta o proceo Repreenta a todo lo que afecta a la variable controlada excepto el controlador y elemento manipulador. Senor Lee el valor de la variable controlada y lo convierte en una eñal utilizable, generalmente de tipo eléctrico. Controlador Se puede coniderar que incluye el detector de error y el bloque de control. El detector de error calcula la diferencia entre la eñal de entrada (referencia y la eñal de alida (variable controlada, obteniendo el error de referencia. El bloque controlador convierte el error en una acción de control (alida del controlador que tenderá a reducirlo. Lo tre modo de control má comune on el Proporcional, el Integral y el Derivativo y u combinacione. 4
16 Lo modo de control má uuale Control Proporcional: La acción de control e proporcional al error. Control Integral: La acción de control e proporcional a la integral del error. Control Derivativo: La acción de control e proporcional al cambio en el error. Manipulador Utiliza la alida del controlador para regular la variable manipulada y normalmente conta de do componente. Primero el actuador y en egundo lugar el controlador final, que e el que directamente cambia el valor de la variable controlada. 5
17 En cuanto a la eñale: Referencia Valor deeado de la alida (variable controlada. Variable controlada E la alida del proceo a controlar. Variable manipulada E la variable obre la que actúa el elemento manipulador. E una de la entrada del proceo. Acción de control Salida del controlador, generalmente coincide con la variable manipulada. Error Diferencia entre el valor medido de la alida y la referencia. 6
18 Tema El concepto de función de tranferencia. Modelo matemático de un itema. Metodología del modelado.. Linealización de un modelo matemático no lineal. 3. Tranformada de Laplace y propiedade. 4. Tranformada invera de Laplace: Método de expanión en fraccione imple. 5. Ecuacione diferenciale lineale en el tiempo y la Tranformada de Laplace. 6. Función de Tranferencia. Función ponderatriz e integral de convolución. 7. Diagrama de bloque. 8. Función de Tranferencia en lazo abierto y en lazo cerrado. 7
19 - Modelo matemático de un itema. Metodología del modelado. El modelo de un itema e un conjunto de ecuacione que da una buena repreentación de u comportamiento dinámico. Cuándo e conidera una buena repreentación, depende del objetivo para el que e contruye el modelo. En general e epera, que ante lo mimo valore de la variable de entrada, el modelo y el itema real den la mima repueta o muy parecida. SISTEMA MODELO 8
20 Un itema etá modelado cuando podemo predecir u comportamiento frente a entrada externa. Apecto a coniderar a la hora de contruir un modelo on: - Se contruye con un propóito epecífico y debe er útil para ee propóito. Diferente propóito pueden neceitar diferente modelo. - Se baa en aproximacione: nunca repreenta perfectamente el itema real. - Se plantea un compromio entre encillez del modelo y la neceidad de incorporar todo lo apecto eenciale del comportamiento del itema. 9
21 Metodología del modelado. Definición del proceo: Elección de qué eñale e toman como entrada, alida, etc Etablecimiento de hipótei: Se plantea un compromio entre la encillez del modelo que e contruirá pero que al tiempo incorpore lo apecto má importante del comportamiento del itema. Ecribir el modelo matemático Uando la leye fíica y química. Parametrización y imulación Hay que etimar lo parámetro del proceo y imularlo. Validación Conite en comprobar la diferencia entre la alida del itema y del modelo. Utilización.
22 .- Linealización de un modelo matemático no lineal. En la mayoría de lo cao la ecuacione que determinan el comportamiento de lo itema reale on no lineale. Matemáticamente, exiten técnica generale de reolución de ecuacione diferenciale lineale, por lo que habitualmente e intenta aproximar el modelo obtenido (no lineal por un modelo lineal. Ete proceo: linealización. En un itema lineal e cumple el Principio de Superpoición, que indica que la alida del itema debida a la uma de entrada e igual a la uma de la alida independiente de cada entrada. También indica que la repueta del itema e puede decomponer en parte: la repueta libre, debida a la condicione iniciale y la repueta forzada debida a la acción de la entrada exterior.
23 dv Ejemplo: Sea la ecuación diferencial m f donde f f bt e la entrada. dt E una ecuación diferencial lineal. Al integrarla e obtiene la repueta (alida del itema (v(t. tdv t f b m dt ( f bt dt dt o bien v ( t t t v( m m E decir: repueta total repueta forzada (debida a f repueta forzada (debida a bt repueta libre(debida a la condicione iniciale Para linealizar una ecuación no lineal e aplica el Dearrollo en erie de Taylor que permite repreentar en forma polinómica cualquier función: f ( x, y ( x x δ f ( y y δ f ( x x ( y y δf δf δ f f ( x, y ( x x ( y y... δx δy δx! δy! δxy! Si en ete dearrollo no quedamo con lo término iniciale, hata la derivada primera, tenemo una ecuación lineal.
24 Ejemplo: Linealizar la ecuación h ka q h A en torno al punto dt dh. Se toma:,,, ( h ka q Ah q a h h f Y e dearrolla la función f en torno a ee punto: ( a a f q q f h h f h h f q a h h f q a h h f Δ Δ Δ Δ,,,,,, ( δ δ δ δ δ δ δ δ iendo h k a f q f h k a h f A h f δ δ δ δ δ δ δ δ de donde:,,, ( Δ Δ Δ Δ Δ q a h k h h k a h A q a h h f 3 depejando: u h k u x h k a x A
25 Notar que en la ecuación linealizada, la variable correponden realmente a incremento a partir del punto de linealización. La ecuación diferencial y x e no lineal, al no cumplir el principio de uperpoición. La ecuación diferencial y mx b tampoco e lineal, al no cumplir el principio de homogeneidad: f ( xb Bf ( x Sin embargo eta ecuacione con una contante, uelen coniderare lineale. Por ejemplo en el cao anterior, tomando: y y b la ecuación queda y mx que cumple todo lo requiito. 4
26 Hay modelo no lineale que no e pueden linealizar como por ejemplo Relé Zona muerta 5
27 Repecto de lo modelo linealizado recordar que:. Son válido únicamente en la proximidade del punto de linealización o punto de operación.. La variable utilizada on incremento repecto al punto de operación. 3. Para diferente punto de operación e pueden obtener modelo linealizado diferente. 4. Lo parámetro del modelo linealizado pierden el entido fíico inicial. 6
28 3.- Tranformada de Laplace y propiedade. Definición. La tranformada de Laplace (TL e un método operacional que irve para la reolución de ecuacione diferenciale lineale. Mediante la TL la ecuacione diferenciale e convierten en ecuacione algebraica en función de una variable compleja (llamada habitualmente. La TL de una función f (t e define como: [ ] t [ ] t L f( t F( e dt f( t f( t e dt Por ejemplo la función exponencial: f ( t para t < Tiene como TL L Ae α t para t αt αt t ( α [ Ae ] Ae e dt A e t A dt α 7
29 Tabla de Tranformada de Laplace N f ( t, t > F(. impulo unidad en t..3.4 doble impulo en t ecalón unidad u(t.5.6 t.7a.7b, n,, 3,..8 función Gamma, k número real>.9. 8
30 ., n,, 3, a.6b
31
32 Teorema obre la Tranformada de Laplace.. Teorema de diferenciación real d L dt f ( t F( f ( Cao general: d L dt n n f ( t n F( ( n ( n f ( f (... ( n ( n f ( f (. Teorema del valor final lim f t ( t lim F( lim f (t (Se cumple únicamente, i exite. t 3
33 3. Teorema del valor inicial 4. Teorema de Integración Real L 5. Tralación en el tiempo f ( lim F( [ ( ] F( f ( f t dt L 6. Producto de e αt f (t. [ ( ] α f t α e F( ( t [ ] αt f F( α L e 3
34 7. Cambio en la ecala de tiempo ( α α α F t f L 8. Diferenciación compleja [ ] ( ( ( F d d t f t L n n n n 9. Integral de convolución [ ] ( ( ( ( F F d f t f L t τ τ τ 33. Producto de do funcione [ ] dp p G p F j t f t f L j c j c ( ( ( ( π
35 4.- Tranformada invera de Laplace: Método de expanión en fraccione imple. Partiendo de una Tranformada ( en e buca la correpondiente función en t. La definición de la Tranformada Invera de Laplace e: c j t L [ F( ] f ( t F( e d t > j c j π Lo habitual para obtener la antitranformada de Laplace e utilizar la tabla de TL conocida y a partir de ella obtener la de la función en el dominio temporal. En el cao de lo itema de control con lo que e trabajará, la función erá cai iempre un cociente de polinomio en en el que: grado del numerador grado del denominador. 34
36 Método de expanión en fraccione imple El punto de partida e un cociente de polinomio en ( ( ( A B F Se expande el cociente en fraccione imple con TL conocida. (... ( ( ( F F F F n con lo que: [ ] [ ] [ ] [ ] (... ( ( ( F L F L F L F L n Según el tipo de polo de F( la decompoición en fraccione proporciona diferente término. Cao poible on: 35 A. F( tiene polo reale ditinto B. F( tiene polo múltiple. C. F( tiene polo complejo
37 A. F( tiene polo reale ditinto ( ( ( n m p p p z z z k A B F n m < para......( ( ( ( ( ( n n p a p a p a A B F... ( ( ( donde lo a i on lo reiduo de lo polo en p k. Se puede comprobar que u valor e obtiene directamente de la expreión: ( k p k k a A B p a k ( ( Como: t p k k k k e a p a L f(t e obtiene entonce como: 36 [ ] t p n t p t p n a e a e ae F L t f... ( ( para t
38 B. F( tiene polo múltiple. Cuando el polo p k preenta multiplicidad j, hay que obtener j reiduo para él. La expreión general de u reiduo e: ( ( ( ( j i A B p d d i j a p k j k i j i j ki,..., ( (! C. F( tiene polo complejo Suponiendo que F( tenga un par de polo complejo conjugado: y ω α ω α j j lo reiduo correpondiente a eto polo on: ( 37 ( ω α ω α ω α ω α ω α ω α j j j j F j K F j K ( (
39 Ejemplo: Obtener la Tranformada Invera de Laplace de ( ( 34 6 ( F j K j K C B A F ( 38 ( C ( ( B ( ( d d A ( ( ( ( ( j j j j j j j j K j j K
40 La Tranformada invera de Laplace de lo tre primero término e, egún la tabla: A.4 B.59 C.34 t L L.4 L L. 59t L L e.34 Para el término complejo: 89 8 j j j j En ete término e puede uar que: ( De donde e obtiene: ( 3 5 ( 3 ( 3 5 ( 3 5 (
41 A eta expreión de puede aplicar directamente la entrada de la tabla de TL: ω e at a en( ωt e at co( ωt ( a ω ( a ω [ 3t 3t co(5.96 (5 ] 3t 3t e t e en t.54e co(5t.6e en(5t Finalmente e llega a que: f ( t.4.59t.54e 3t.34e t co(5t.6e 3t en(5t 4
42 5.- Ecuacione diferenciale lineale en el tiempo y la Tranformada de Laplace. Lo modelo de la planta y/o itema e van a exprear mediante ecuacione diferenciale lineale y de parámetro contante (i el modelo e no lineal el primer pao e linealizar la ecuacione. Solucionar eta ecuacione ignificará obtener la eñal en el tiempo correpondiente a la alida del itema. La TL proporciona un método para olucionar ete tipo de ecuacione. Lo pao on:. Se toma la TL de cada término de la ecuación diferencial. Se convierte la ecuación diferencial en una ecuación algebraica (en y e depeja la variable dependiente en eta ecuación.. La olución en el tiempo e obtiene realizando la TL Invera de la variable dependiente. 4
43 Ejemplo: b x a x x x x ( y, ( iendo, 3 tomamo la TL: [ ] [ ] [ ] [ ] [ ] ( a b a X X x X x x X x x X t x L x X t x L X t x L 3 ( 3 ( ( ( 3 ( ( ( ( ( ( ( ( ( ( ( ( depejando: 3 3 ( b a b a a b a X 4 tomando la TL invera: [ ] ( ( para ( ( t e b a e b a X L t x t t
44 Ejemplo: 5 x x x u Hallar la olución i U ( y condicione iniciale nula. Tomando TL: ( 5 X ( depejando: reolviendo: A, B.5, C.5 X ( 4 4 ( A B C X ( ( t t con lo que: x ( t te.5e. 5 43
45 6- Función de tranferencia. Función ponderatriz e integral de convolución. La Función de Tranferencia de un itema, decrito mediante una ecuación diferencial lineal e invariante con el tiempo, e define como el cociente entre la TL de la alida y la TL de la entrada, uponiendo toda la condicione iniciale nula. Si el itema e repreenta mediante la ecuación diferencial: a y a y... a y a y bx bx... b x b x n n m m n n m m iendo y la alida y x la entrada, la Función de Tranferencia G( viene dada por: m m Y ( b b... bm bm G( n n X ( a a... a a n n 44
46 Alguna caracterítica de la F de Tranferencia: E un modelo matemático. E una propiedad del itema, independiente de la magnitude y la naturaleza de la entrada. No proporciona información obre la etructura fíica del itema. Si e deconoce la ecuación diferencial que decribe el itema, e puede obtener la FT de forma experimental, excitando al itema con entrada conocida y etudiando u repueta. 45
47 Función ponderatriz. Repueta impulional. La repueta de un itema puede conocere, conociendo la FT de éte y la entrada a la que e le omete: Y ( G( X ( Uno de lo teorema de la TL indica que la integral de convolución en el dominio temporal da lugar al producto de funcione en el dominio. [ ] f t τ f ( τ dτ F ( F ( L t t t Ahora e tendrá: y( t x( τ g( t τ dτ ( ( g τ x t τ dτ g(t x(t para t < Si la entrada del itema e el impulo unitario X y por tanto Y ( G ( yt ( gt ( ( ( La FT de un itema e la TL de la repueta impulional de ee itema. g(t también e conoce como Función Ponderatriz. 46
48 7- Diagrama de bloque. El diagrama de bloque de un itema e una repreentación gráfica de la funcione que lleva a cabo cada componente y el flujo de eñale exitente. Muetra la relacione entre lo ditinto componente del itema. El diagrama de bloque de un itema no e único. Se utilizan elemento de conexión: Punto uma. Se repreenta por un círculo con una cruz, que imboliza la operación uma. A C- B (AB-C Punto ramificación. A partir del cual la eñal va de modo concurrente a otro bloque o punto uma. A A A 47
49 El diagrama de bloque de un itema en lazo cerrado e: Donde: R( E( C( R( - Entrada de referencia - B( G( H( C( - Salida controlada E( - Error de referencia B( - Señal de retroalimentación En él e definen: Función de tranferencia en TRAYECTORIA DIRECTA G ( Función de tranferencia en LAZO ABIERTO Función de tranferencia en LAZO CERRADO GH ( ( G ( GH ( ( 48
50 Sitema con perturbación En él e ditingue en la entrada entre la entrada conocida (R( y el ruido, o entrada de tipo aleatorio y deconocida (D(. Su diagrama de bloque e uele repreentar como: R( E( - G( D( G( C( B( H( 49
51 En ete cao e definen do Funcione de Tranferencia, una repecto a cada entrada: R( - E( G( G( C( - E( G( D( G( C( B( H( B( H( C R ( GG ( R( GG H ( C D ( D( G( GG H ( La alida global del itema, erá la uma de la do alida: G( C( C ( CR ( GGH( ( GR( D( D 5
52 Realización de un Diagrama de Bloque Ecribir la ecuacione que decriben el comportamiento dinámico de cada componente. Tomar la TL de eta ecuacione uponiendo condicione iniciale nula. 3 Repreentar individualmente en forma de bloque cada ecuación en el dominio de Laplace. 4 Integrar todo lo elemento en un diagrama de bloque completo. 5
53 Ejemplo: Obtener el diagrama de bloque del itema de la figura, tomando como entrada e i y como alida e. it e( t e ( t itdt ( R C i ( e ( t Tomando Tranformada de Laplace: I ( Ei ( E( R E( I( C ( E( i I( - E o( C R E o( I( Combinando ambo: E( i - I( E o( R C E o( 5
54 Reducción de un diagrama de bloque Al implificar un diagrama de bloque e tiene que cumplir: El producto de la FT en la trayectoria directa debe er el mimo. El producto de la FT alrededor del lazo debe er el mimo. Alguna combinacione de bloque típica e pueden reducir como e muetra: X Y Z G( G( X GG( Z O bien X GG( Z 53
55 X ± Movimiento de un punto uma anterior a un bloque G( Z X G( ± Z Y G( Y X Movimiento de un punto eparación poterior a un bloque G( Y X G( Y Z Z G( X Movimiento de un punto eparación anterior a un bloque G( Y X G( Y X X G( X G( Movimiento de un punto de uma poterior a un bloque ± Z X ± G( Z Y G( Y 54
56 Ejemplo: 55
57 Tema 3 Repueta temporal tranitoria.. Introducción.. Señale de prueba típica. 3. Análii de itema de primer orden. 4. Sitema de egundo orden. 5. Sitema de orden uperior. 6. Polo dominante 7. Efecto de añadir polo y cero a la función de tranferencia. 8. Sitema con retardo. 56
58 . Introducción. La repueta de un itema e puede dividir en do parte: repueta tranitoria y repueta etacionaria. c(t c ( t c ( t La repueta tranitoria puede definire como la parte de la repueta que e anula cuando el tiempo aumenta. La repueta etacionaria puede definire como la parte de la repueta que permanece cuando el tiempo aumenta. t ESTACIONARIA c (t c (t lim c( t TRANSITORIA c (t lim c ( t t t t t Sin embargo, para la repueta tranitoria, también e utiliza como definición: repueta del itema en lo primero intante, depué de aplicar la entrada. Eta última definición erá la forma en que etudiaremo la repueta tranitoria. 57
59 Una caracterítica muy importante de un itema e la Etabilidad: Un itema lineal e etable i para una entrada acotada, la repueta también etá acotada. Por ejemplo, i la repueta crece hacia el infinito u ocila con ocilacione creciente, entonce e inetable. La etabilidad e una caracterítica inherente al itema y no depende de la entrada al itema: un itema lineal ES etable o ES inetable. Como e verá má adelante la etabilidad de un itema dependerá de la raíce del denominador de u función de tranferencia, también llamado polo del itema. Para que un itema lineal ea etable todo lo polo de u función de tranferencia, deberán tener parte real negativa. 58
60 . Señale de prueba típica Aunque la entrada a un itema pueden er muy variada por propóito de análii y dieño, e uponen alguno tipo báico de entrada de prueba para evaluar u comportamiento. Cuando e analiza la repueta temporal tranitoria la entrada de prueba má utilizada on: el impulo unitario el ecalón la rampa Cuando e analiza el comportamiento etacionario de un itema en el dominio de la frecuencia, e utiliza una entrada enoidal con frecuencia variable. 59
61 Impulo Unitario. La función impulo e baa en una función rectangular: ( ( iendo ( t t f t t f δ ε ε ε ε ε ε > Preenta la propiedade iguiente: ( ( ( ( a g dt t g a t dt t 6 δ δ
62 E útil cuando e etudia la integral de convolución para una alida en función de la entrada: t c( t g( t τ r( τ dτ L Si la entrada e r(tδ(t [ G( R( ] c( t tiene un valor ditinto de cero en τ t c ( t g( t g( t τ r( τ dτ La repueta ante un impulo unitario e la Función Ponderatriz. 6
63 Entrada ecalón. E del tipo: A t A rt ( R ( t < Donde A e una contante real, que vale i el ecalón e unitario. Sirve para determinar cómo reponde el itema ante cambio abrupto en la entrada 6
64 Entrada rampa. E del tipo: At t A rt ( R ( t < Donde A e una contante real. Sirve para determinar cómo reponde el itema ante eñale que varían linealmente en el tiempo. 63
65 Señal de tet etándar En general una eñal de tet, tendrá la forma: n! Rt ( Rt n R ( R n Como puede vere la eñal ecalón e la derivada de la eñal rampa, la rampa ería la de la función parabólica, etc. Al aplicar eta eñale obre itema lineale vamo a poder comprobar que la repueta ante eta eñale también van a er la derivada de la repueta de orden uperior. E decir en un itema lineal, u repueta ante un ecalón unitario e la derivada de la repueta del mimo itema ante una rampa unitaria, etc. 64
66 3. Análii de itema de primer orden. Se denomina itema lineal invariante de primer orden, a todo itema que en régimen dinámico e define por una ecuación diferencial de coeficiente contante de orden uno. Lo itema lineale de primer orden invariante, etán definido para una ola entrada y una ola alida, por una ecuación que tiene la forma: ( ( ( t r b t c a dt t dc Al aplicar la TL, reulta: ( ( ( ( R b C a c C de donde: a c R a b C ( ( ( Suponiendo condicione iniciale nula: T K a b R C F ( ( ( 65
67 F( C( R( b a K T T: Contante de Tiempo K: Ganancia del itema. Se puede ver que el polo del itema e a. Si a tiene parte real poitiva entonce el itema erá inetable. Notar que a egún la expreión utilizada. T El iguiente pao e analizar la repueta de ete tipo de itema ante la eñale de prueba. 66
68 3.. Repueta ante un ecalón unitario. Tenemo como entrada La repueta del itema e: Luego: R( k T C ( k T T t c( t k e T Como caracterítica de ea repueta: Función que vale cero cuando t vale cero y tiende a k cuando t crece. Para tt, c(t.63k, e decir e alcanza el 63,% del valor final. Cuanto má pequeña e T, má rápida e la repueta del itema. 67
69 La pendiente de la repueta en el origen e pue dc dt k T e t T El valor de la pendiente tiende a cero cuando t Con lo que la repueta de un itema de primer orden (con k ante un ecalón unitario e t k T k T 68
70 En lo expueto e ha upueto que el itema era etable. Si fuera inetable, la repueta ería de la forma: 5 Step Repone From: U( 5 Amplitude To: Y( Time (ec. 69
71 En la práctica hay que tener cuidado con la expreión de la FT empleada. 7
72 Alguno valore numérico: 7
73 3.. Repueta a una rampa unitaria. La entrada e ahora ( R La repueta erá: T T T k T k C ( E decir: T t Te T t k t c ( 7
74 La alida tiene entonce la forma (para k: La diferencia entre la entrada y la alida, e decir, el error etacionario para un itema con k (ganancia unidad e: t e( t r( t c( t T e T aí cuando t, e(t T. A menor valor de T, menor error etacionario. 73
75 Se hace notar que para un itema con ganancia ditinta de la repueta en el etacionario no ería paralela a la entrada, por lo que el error etacionario ería variable en el tiempo. También hay que hacer notar que la entrada rampa e una entrada no acotada, por tanto la repueta de un itema etable ante una entrada rampa no no dará información acerca de u etabilidad. 74
76 3.3. Repueta a un impulo unitario. Función ponderatriz. En ete cao: R( luego: C ( k T, de donde: ct ( (Se puede ver que la función ponderatriz e la TL invera de la FT. k T e t T La repueta c(t cuando t y vale (Por ej., para k k c ( t para t. T 75
77 4. Sitema de egundo orden. Se denomina itema lineal invariante en el tiempo de egundo orden monodimenional a todo itema que, en régimen dinámico, e define por una ecuación lineal de coeficiente contante de egundo orden: d c( t dt dc( t a dt b c( t d r( t Aplicando la TL uponiendo condicione iniciale nula: d C( R( a b Haciendo: b w a ξ w d kw n n n obtenemo la forma normalizada de la FT: F( C( R( kwn ξw n w n 76
78 F( C( R( Kw n ξω ω n n Veremo como e puede decribir el comportamiento dinámico de ete itema con lo do parámetro: ω n : frecuencia natural no amortiguada ξ : coeficiente de amortiguamiento. σ ξ * ω n : coeficiente de atenuación. En lo cao iguiente e tomará K. 77
79 4. Repueta a un ecalón unitario. La entrada e R ( C ( ω y la alida erá n ξωn ωn Para obtener la expreión temporal de la alida e etudian tre cao, egún donde e encuentran lo polo de la FT., ξ ω ± ω ξ ξ ω ± n n n jω d 78
80 a <ξ< Denominador de F( preenta raíce compleja (polo complejo. Sitema Subamortiguado. c( t e ξω n t ξ en ( ω t ξ arccoξ ; t n La repueta preenta una componente ocilatoria. El parámetro ω d ω n ξ recibe el nombre de frecuencia natural amortiguada. b ξ El denominador de F( preenta una raíz real doble Sitema Críticamente Amortiguado. ω c( t e n t ( ω t t n 79
81 c ξ> F( preenta do polo reale Sitema Sobreamortiguado. ( ( ( ξ ξ ξ ξ ξ ξ ω ξ ξ ω ξ ξ t n t n e e t c En el cao de ξ la repueta no e ocilatoria, y e parece a la repueta de un itema de er orden, con la diferencia de que la pendiente en el origen en ete cao e cero. 8
82 En la gráfica pueden vere la curva de repueta para lo diferente cao. Puede vere que cuanto menor e ξ má ocila la repueta. 8
83 Para ξ tenemo una repueta ocilatoria que no e atenúa. Ete e el cao de raíce del denominador de F( (polo imaginaria pura. El itema e No Amortiguado. Para ξ< el itema preentará una ocilación creciente, lo que quiere decir que e inetable. Lo polo de F( tienen parte real poitiva. Sitema con amortiguamiento negativo. Aí, por ejemplo, la figura muetra la repueta ante el ecalón de un itema de egundo orden con polo con parte real poitiva Tiempo 8
84 4.. Interpretación geométrica de lo coeficiente. En un itema de º orden ubamortiguado, lo polo on complejo conjugado. La repreentación de eto polo en el plano e la iguiente: P P σ σ σ ξω n ω d ω n ξ coθ jωd jω d ξ w n ξ P ξ θ w n w n w d ξ enθ P 83
85 4.3. Epecificacione de repueta tranitoria. En la práctica, en mucho cao e epecifican la caracterítica deeada de lo itema de control en término de parámetro en el dominio del tiempo. La repueta de lo itema dependen de la condicione iniciale. Por conveniencia, para comparar la repueta de uno itema con la de otro e upondrán condicione iniciale nula. E habitual etablecer uno parámetro de comportamiento de lo itema, a partir de la repueta de un itema de egundo orden ubamortiguado: 84
86 Tiempo de retardo, t d Tiempo que tarda la repueta en alcanzar por primera vez el 5% del valor final. Tiempo de crecimiento, t r Tiempo requerido para que la repueta crezca del al % del valor final en itema ubamortiguado. Del % al 9% o del 5% al 95% del valor final en itema obreamortiguado. Tiempo de pico, t p Tiempo requerido para que la repueta alcance el primer máximo. Sobreimpulo máximo, M p E el valor del pico máximo de la repueta, medido dede la unidad. Si el valor final de la repueta no e e define como M p c( t p c( *% c( Tiempo de etablecimiento, t Tiempo requerido para que la repueta e mantenga alrededor de cierto rango alrededor del valor final (habitualmente el 5% ó el %. 85
87 Gráficamente lo parámetro e muetran en la iguiente figura:.5 Repueta ante ecalon Sobrepico Amplitud Tiempo de retardo.5 Tiempo de crecimiento Tiempo de pico Tiempo de etablecimiento Tiempo (ec 86
88 Eto parámetro permiten epecificar cómo erá la forma de la repueta. A continuación e calculan la expreione analítica de eto parámetro. Se debe tener en cuenta que todo ello e calculan para itema ubamortiguado y coniderando ganancia unidad. 87
89 4.3.. Sobreimpulo máximo y tiempo de pico. La expreión de la repueta del itema ubamortiguado e: ξwnt e c( t en w t co ; t d ξ ξ ( Para encontrar el máximo, derivamo repecto al tiempo e igualamo a cero: ξwnt dc( t w [ ( ] ne ξ en( wdt ϑ ξ co wdt ϑ donde ξcoθ. dt ξ Dearrollando el eno y el coeno de la uma: ξw dc( t w e n t n dt ξ Igualando a cero, e obtienen la olucione: de la cual obtenemo: en( w t d t t y wnt n n nπ t ξ w n ξ π,,,... 88
90 La olución t olo e válida para ξ. En nuetro cao no interea la otra olución para n: t p ω n π ξ Se oberva que aunque la repueta no e periódica, lo pico de la repueta e preentan a intervalo periódico. Su frecuencia e igual a la parte imaginaria de lo polo complejo conjugado. El valor del obreimpulo máximo e M p e πξ ξ En tanto por ciento M p (% e πξ ξ 89
91 4.3.. Tiempo de crecimiento En itema ubamortiguado e puede obtener haciendo c(t r : cuya olución e: c ( t r e ξw n t r ξ en( w t ϑ π ϑ en ( wt d r ϑ tr w d r d 9
92 Tiempo de etablecimiento. Para el tiempo de etablecimiento e uelen uar do curva envolvente de la repueta: ± e ξ t w n ξ cuya gráfica on: A partir de eta curva e obtienen una expreione del tiempo de etablecimiento aproximada: 4 3 t (criterio % t (criterio 5% ξw ξw n n 9
93 Tiempo de retardo. Para el tiempo de retardo e debería hacer c(t r.5, y reolver la ecuación mediante algún método numérico. No e poible obtener una expreión analítica. 9
94 4.4. Repueta a un impulo unitario Igual que para el cao del ecalón unitario e ditinguen tre cao: <ξ< : Sitema Subamortiguado. ( ; ( t t en e t c n t w n n ξ ω ξ ω ξ ξ itema Críticamente Amortiguado. ( t n n te t c ω ω ξ> itema Sobreamortiguado. 93 ( ξ ω ξ ω ω ξ ξ ω ξ ξ t n t n n n e e t c
95 Como puede vere eta expreione correponden a la derivada repecto al tiempo de la expreione que obteníamo para el ecalón unitario (ver punto, eñale de tet etándar. (Curva de repueta impulo de un itema de º orden normalizado para diferente valore de ξ 94
96 5. Sitema de orden uperior. En general un itema de cualquier orden tendrá una función de tranferencia de la forma: ( ( ( D N a a a a b b b b F n n n n m m m m la m raíce del polinomio N( on lo cero del itema, y la n raíce del polinomio D( on lo polo del itema. La ecuación caracterítica e la que e obtiene al igualar a cero el denominador: ( D 95
97 Teniendo en cuenta lo anterior, podemo poner: F( donde lo z j on lo cero y lo p i on lo polo. m j k n ( z ( p i Para obtener la TL invera, el método que utilizamo e el de decomponer el cociente de polinomio en uma de fraccione imple. Para ello debemo tener en cuenta lo polo del itema o raíce de la ecuación caracterítica. i j 96
98 Se pueden dar vario cao: Exite un polo en el origen de multiplicidad l. E decir: D ( l D ( donde el grado del polinomio D ( e n n-l Exiten raíce reale con grado de multiplicidad arbitrario Podremo tener q raíce σ h con un grado de multiplicidad p h D q ph ( ( σ h D ( h e cumple que D e un polinomio de grado n n - q h p h 97
99 El polinomio D ( ha de tener un número par de raíce compleja conjugada, que pueden er múltiple. Teniendo r raíce de la forma α k jw k con grado de multiplicidad u k, e cumplirá: D r u [ α jw ] k [ jw ] ( α k k k k u k e cumplirá que k n l q h k r p h u k En definitiva e puede ecribir: F( k q l h r h k m j ( z ph uk ( σ [ α jw ] [ α jw ] k i k k k u k 98
100 Expreada en forma de fraccione imple queda de la forma: F( l u r u k k v A u u C ( σ v [ α jw ] [ α jw ] v k q ph h u Agrupando la raíce compleja conjugada podemo poner: l q ph Au Bhu F( u u u h u σ r u M u k k B hu k h C u * u k ( k uk uk k v [ α ( w α ] k A partir de aquí e puede obtener la repueta de ete itema ante diferente entrada. N k k h v k 99
101 5.. Repueta impulional. La entrada al itema e: R(. La repueta e la Función Ponderatriz: l q ph r uk A u u Bhu u σ t C h kv v α k t c( t f ( t t ( t e ( t e co wkt argc u u! h u u! k v ( v! ( De la forma de la función ponderatriz, podemo analizar alguno apecto del itema. Para que el itema ea etable, u repueta ante entrada acotada deberá etar también acotada. (Para el cao de una entrada impulo i el itema e etable la repueta debe tender a cero: kv f ( t dt K < Analizando cada umando de la expreión de f(t, vemo:
102 Para que el umando l ( u u A! u t u eté acotado (tienda a cero. E neceario que u, ya que i no, crecería con el tiempo o ería una contante cuya uma no etaría acotada (no tendería a cero. E decir, el itema no debe tener polo en el origen para que ea etable. Para que lo otro do umando etén acotado (tiendan a cero. q ph r uk Bhu u σ t C h kv v α k t Tanto para t e como para ( h u ( u! t e co wkt argckv ( k v v! e neceita que lo exponente de la exponenciale ean negativo. Cumpliéndoe eto, al tener má fuerza el término exponencial que la potencia de t, el término completo etará acotado (tenderá a cero. Eto implica que la raíce del itema deberán tener parte real negativa, e decir deberán etar ituada al lado izquierdo del plano. Lo polo complejo con parte real nula, i tienen multiplicidad hacen que la repueta del itema no crezca, pero ocila de forma mantenida. Con multiplicidad mayor que, la repueta crece indefinidamente.
103 5.. Repueta a un ecalón. En ete cao la entrada tiene la forma: R( y la repueta e: C( A B l q p r u u h k hu u u h u u ( [ ( w ] v σ k v h α α M u k k N k u k k A Realizando la tranformada invera de Laplace: c( t l q p r u h k A C u u Bhu u σ t h kv g t t t e t u ( u h u ( u (!! k v ( v! v e α t k co ( w t argc A k kv
104 6. Polo dominante. De la expreione que e han vito en la pregunta anterior para la repueta de un itema, podemo decir que lo término con exponenciale negativa de valor alto e anulan má rápidamente que la exponenciale negativa con valor pequeño. Según eto, el efecto de eta exponenciale de valor pequeño dura má que la de valor alto. En definitiva, lo polo con parte real má pequeña (má proximo al eje imaginario influyen má en la repueta que lo polo con parte real má grande (alejado del eje imaginario. De acuerdo con eto e definen lo polo dominante, como lo polo má próximo al eje imaginario, cuya parte reale ean cinco vece menore que la parte reale de lo polo inmediatamente a la izquierda. 3
105 En general, e va a coniderar que la dinámica del itema va a etar dominada por lo polo má proximo al eje imaginario, pudiendo er polo complejo conjugado o un polo real. Con lo que e upondrá que el itema puede aimilare a un itema de egundo o de primer orden. A la hora de dieñar itema de control iempre e va a penar en que el itema va a preentar polo complejo conjugado, y e tratará al itema como uno de º orden aunque en realidad ea de orden mayor. En ete razonamiento no e ha tenido en cuenta la influencia de lo cero en la repueta. Si bien e cierto que no influyen en la etabilidad del itema, como e verá, í que influyen en la forma de la repueta. Se debe tener preente que lo cero de lazo abierto, on también lo cero de lazo cerrado. 4
106 7. Efecto de añadir polo y cero a la función de tranferencia. Se parte de un itema en lazo cerrado al que e añaden polo y cero, tanto en lazo abierto como cerrado. Se etudiará como ea adición hace que el comportamiento del itema cambie. El itema de partida e: R( - E( G( C( B( H( La poibilidade que e etudian on: Adición de un polo a la FT de trayectoria directa. Adición de un polo a la FT en lazo cerrado. Adición de un cero en lazo cerrado. Adición de un cero en la trayectoria directa. 5
107 7.. Adición de un polo a la FT de trayectoria directa. Se trata de añadir un polo de la forma: - Tp H( G( Por ejemplo G( w n ( ζw ( T n p (w n y ζ.7 Puede vere que la adición de un polo en la trayectoria directa tiene generalmente el efecto de incrementar el obreimpulo máximo del itema en lazo cerrado. Su influencia e mayor cuanto má próximo etá al eje imaginario. Amplitude To: Y( Tp Tp. Tp Step Repone From: U( Tp5 Tp Tp Time (ec. 6
108 7.. Adición de un polo a la FT en lazo cerrado. El polo a añadir ahora etará ituado: En cuanto al obreimpulo e refiere, el efecto e jutamente el contrario que e producía al adicionar el polo en la trayectoria directa. Cuanto má próximo eta al eje imaginario el nuevo polo, má domina la dinámica del itema, y la repueta e parece má a la de un itema de primer orden. Amplitud To: Y( Tp Tp - G( H( Step Repone From: U( Tp. Tp Tp Tp5 Tp Time (ec. 7
109 7.3. Adición de un cero en lazo cerrado. Tp - G( H( Step Repone From: U( 9 Tp 8 Diminuye el tiempo de crecimiento e incrementa el obreimpulo máximo de la repueta. Amplitud To: Y( Tp5 3 Tp Tp Tp Time (ec. 8
110 7.4. Adición de un cero en la trayectoria directa. 6( Tz ( ( Conideremo un ejemplo. En ete cao: G( La función de tranferencia en lazo cerrado, i e toma realimentación unitaria e: 6( Tz F( 3 3 ( 6Tz 6 Se ve que: El cero de lazo abierto igue iendo un cero en lazo cerrado. Ademá T z aparece en el denominador, por lo que también influye en la poición de lo polo de lazo cerrado. En ete cao lo cero en general van a tener el efecto de diminuir el obreimpulo máximo del itema. Sin embargo, eto va a depender de la configuración de cada itema, por lo que no e puede generalizar. 9
111 En concreto en el ejemplo anterior podemo ver la gráfica iguiente: Amplitud To: Y( Tz Tz5 Tz Step Repone From: U( Tz. Tz.5 Tz Tz Al añadir un cero, el itema que inicialmente era marginalmente etable, preenta un obreimpulo cada vez má pequeño egún acercamo el cero al eje imaginario Time (ec. Llega un momento en el que al eguir acercando el cero, el obreimpulo máximo vuelve a crecer.
112 8. Sitema con retardo. En alguno itema e produce un retrao temporal entre un cambio en el itema y cuándo e detecta ete cambio, o también un retrao entre un cambio en la entrada y la variación de comportamiento del itema. c( t r( t T La función de tranferencia del retardo de tranporte e: e T Al er una función que no e puede tratar como un polinomio, e uele tomar una aproximación.
113 a Sitema de primer orden Se aproxima por e T (Aproximación válida para frecuencia T baja. b Dearrollo en erie Preenta el problema de que e un polinomio e T T ( T... con! grado de numerador>grado del denominador. c Aproximación de Padé 3 n T T ( T ( T T n... (... T e 8 48 n! e T 3 n Con n orden de la aproximación. T ( T ( T T e n! T Para n T e T T T Buena aproximación para frecuencia <ω<.5/t
114 Tema 4 Error en etado etacionario y etabilidad.. Error en etado etacionario. Preciión.. Tipo del itema. Coeficiente etático de error. 3. Error etacionario: cao de realimentación no unitaria. 4. Comparación de lo errore en etado etacionario de un itema en lazo abierto con lo de un itema en lazo cerrado. 5. El concepto de etabilidad. 6. Criterio de etabilidad de Routh-Hurwitz. 3
115 . Error en etado etacionario. Preciión. Como e mencionó en el tema anterior un itema e etable i para una entrada acotada, la repueta también etá acotada. Si la repueta crece hacia el infinito u ocila con ocilacione creciente, entonce el itema e inetable. Por lo tanto no tiene entido hablar de repueta etacionaria de un itema i éte e inetable. De hecho e uele hablar de etado etable como inónimo de etado etacionario. La caracterítica de la repueta etacionaria que interea etudiar e el error: El error etacionario e la diferencia entre la alida del itema y la entrada o referencia. En el dieño de lo itema automático de control un objetivo habitual e que el error etacionario ea lo menor poible. Ete e uno de lo motivo fundamentale de que e añada la realimentación a lo itema, ya que permite reducir ete error. 4
116 Lo errore en un itema de control e pueden atribuir a diferente factore:. Por cambio en la entrada de referencia: Se produce un error tranitorio y el error etacionario no varía. Aí en la figura puede vere que el error etacionario inicial e del % y al cambiar la referencia e produce un error tranitorio, pero depué vuelve a er del % F entrada repueta Imperfeccione, envejecimiento o deterioro en lo componente del itema: Provoca que un itema no reponda como e había previto y e produzcan errore. 3. Incapacidad del itema de eguir determinado tipo de entrada: Cualquier itema fíico ufre, por naturaleza, un error en etado etacionario en repueta a cierto tipo de entrada. Ej: Sitema de er orden ante entrada rampa (ver Tema. 5
117 Un itema puede no tener un error en etado etable para una entrada ecalón, pero el mimo itema puede exhibir un error en etado etable diferente de cero ante una entrada rampa. El que un itema determinado exhiba un error en etado etable para un tipo epecífico de entrada depende de una caracterítica intríneca que e el tipo de la función de tranferencia en lazo abierto del itema. E decir, conocido el tipo de un itema, podremo predecir el error que va a preentar ete itema ante una determinada entrada. 6
118 . Tipo del itema. Coeficiente etático de error. (En adelante realizaremo el etudio del error etacionario para itema con realimentación unitaria, que uelen er lo má habituale. Sea el itema de control con FTLC F G( G( (e ha upueto como e indicó realimentación unitaria. La función de tranferencia en lazo abierto G( e: G( K( T ( T...( T a b m N ( T ( T...( T p 7
119 El equema de claificación de lo itema egún u tipo e baa en la cantidad de integracione indicada por dicha función de tranferencia en lazo abierto. Un itema e denomina aí De tipo Si N De tipo Si N De tipo Si N Conforme el número del tipo e mayor, mejora la preciión; in embargo, aumentar el número del tipo agrava el problema de la etabilidad. 8
120 Para el equema habitual de la figura ( ( ( ( G G R C La función de tranferencia entre la eñal de error E( frente a la entrada de referencia R( e: ( ( ( ( ( G R C R E El error en etado etable e obtiene cuando t. Uando una de la propiedade de la Tranformada de Laplace dicho error e: ( ( lim ( lim ( lim R G E t e e t Dependiendo del tipo del itema (de G( y de la entrada de referencia (R( e puede entonce definir una erie de coeficiente de error. 9 G( C( R( -
121 .. Contante de error de poición etática K p Ante una entrada ESCALÓN UNITARIO El error en etado etable del itema e e lim G( G( Se define: Contante de error de velocidad etática K p Kp limg( G( En término de la contante K p el error etacionario e e K p
122 Para un itema de tipo : K Para un itema de tipo o mayor: K K( T ( T... a b lim ( T ( T... p p K K( T ( T... a b lim N ( T ( T... paran Para un itema de tipo, la contante de error de poición etática K p e finita, en tanto que, para un itema de tipo ó mayor K p e infinita. Luego: Para una entrada ecalón unitario, el error en etado etable e erá: e KP K e Para itema tipo Para itema tipo
123 .. Contante de error de velocidad etática K v : Ante una entrada RAMPA UNITARIA El error en etado etable del itema e e lim lim G( G( Se define: Contante de error de velocidad etática K v Kv lim G( En término de la contante K V el error etacionario e Para un itema de tipo : Para un itema de tipo : Para un itema de tipo o mayor: e K( Ta ( Tb... Kv lim ( T ( T... K( Ta ( Tb... Kv lim K ( T ( T... K( Ta ( Tb... Kv lim N ( T ( T... K v paran
124 Un itema de tipo e incapaz de eguir una entrada rampa en el etado uniforme. E decir preenta un error creciente. Por ejemplo, i la función de tranferencia de lazo abierto e Sitema de tipo ante entrada rampa G 8 6 F entrada repueta
125 Un itema de tipo con realimentación unitaria igue la entrada rampa con un error etacionario finito. Operando en etado etable, la velocidad de alida e igual a la velocidad de entrada, pero con un error de poición. Si ahora la función de tranferencia de lazo abierto e G 5 ( Sitema de tipo ante entrada rampa F entrada repueta
126 Para un itema de tipo o mayor, éte igue una entrada rampa con un error de cero en etado etable. Tomando como función de tranferencia de lazo abierto G 3 ( Sitema de tipo ante una entrada rampa
127 Reumiendo, para una entrada rampa unitaria, el error en etado etable e erá: e e e Para itema tipo K V K K Para itema tipo V Para itema de tipo K o mayor V 6
128 .3. Contante de error de aceleración etática K a. Ante una entrada PARÁBOLA UNITARIA (entrada aceleración El error en etado etable del itema e e r( t t para t para t < lim 3 G( G( Se define: Contante de error de aceleración etática K a : K a lim G( En término de la contante K a el error etacionario e: e K a 7
129 Para un itema de tipo : K( Ta ( Tb... Ka lim ( T ( T... Para un itema de tipo : K ( Ta ( Tb... K a lim ( T ( T... Para un itema de tipo : K( Ta ( Tb... Ka lim K ( T ( T... Para un itema de tipo 3 o mayor K( Ta ( Tb... Ka lim N ( T ( T... para N 3 Lo itema de tipo y on incapace de eguir una entrada parábola en etado etable. Lo itema de tipo con realimentación unitaria puede eguir una entrada parábola con una eñal de error finita. Lo itema de tipo 3 ó mayor igue una entrada parábola con un error de cero en etado uniforme. 8
130 Para una entrada rampa unitaria, el error en etado etable e erá entonce e e e K Para itema tipo y de tipo Para itema tipo Para itema de tipo 3 o mayor 9
131 El reumen de lo errore en etado etable para lo itema de tipo, de tipo y de tipo cuando etán ujeto a divera entrada e muetra en la tabla: Ecalón r(t Rampa r(tt Parábola r(t/t Sitema tipo K Sitema tipo K Sitema tipo K Poición Velocidad Aceleración Lo valore finito para lo errore en etado etable aparecen en la diagonal, obre la diagonal on infinito y bajo la diagonal on cero. 3
132 Recordar que Un error de velocidad finito implica que, depué de que han deaparecido lo tranitorio, la entrada y la alida e mueven a la mima velocidad, pero tienen una diferencia de poición finita. La contante de error K p, K v y K a decriben la capacidad de un itema de realimentación unitaria de reducir o eliminar el error en etado etable. En general e conveniente aumentar la contante de error, al tiempo que e conerva la repueta tranitoria dentro de un rango aceptable. Para mejorar el comportamiento en etado etable aumentamo el tipo del itema agregando uno o má integradore a la trayectoria directa, lo cual produce un problema de etabilidad adicional. 3
133 .4. Obervación: Función de tranferencia en lazo cerrado para cada tipo. 3 Sitema de tipo cuya ganancia e ( ( ( ( iendo b ( ( ( a b a A B A F b b b a a a B A G m m n n El error en etado etable ante un ecalón unitario e ( ( ( lim ( * ( ( lim a b a F R F R e Sitema de tipo (error nulo ante un ecalón unitario ( ( cuyagananciae ( ( ( ( a a a a a b b b a a a F b b b a a a B A G n n m m n n m m n n
134 33 Sitema de tipo (error nulo ante un ecalón unitario y una rampa unitaria ( ( ( ( ( ( a a a b b b a a a F b b b a a a B A G n n m m n n m m n n Lo coeficiente de y del numerador y denominador de F on iguale Sitema de tipo 3 (error nulo ante un ecalón unitario, una rampa unitaria y una parábola ( ( ( ( ( ( 3 3 a a a b b b a a a F b b b a a a B A G n n m m n n m m n n En ete cao: Lo coeficiente de, y del numerador y denominador de F on iguale
135 Ejemplo: 3.5 G( y H ( 3 Sea 4 3 un itema de tipo 3. Su función de tranferencia de lazo cerrado e 3.5 F ( Obervad también que un itema con un derivador en G ( Tipo -? a. En lazo cerrado tiene ganancia y por tanto la repueta del itema ante un ecalón unitario tiende a cero. 34
136 3. Error etacionario: cao de realimentación no unitaria. En el etudio del error etacionario e ha upueto anteriormente que el itema preenta realimentación unitaria R( - G( C( G( C( R( G( Pero en general e tiene R( - G ( H( C( F( C( R( G( GH ( Según la caracterítica de H( e puede etudiar el comportamiento del error etacionario conociendo la FT en lazo cerrado. 35
137 El hecho de que H( no ea e debe a que la alida y la referencia no tienen la mima unidade El error en ete cao e puede definir como E( R( C( H ( R( GH ( El error etacionario e entonce: e lim E( lim R( GH ( Llegamo entonce a una expreión imilar a la que teníamo para itema con realimentación unitaria (pag. 9, olamente que ahora tenemo en el denominador el producto de GH. Un itema de Tipo erá aquél que tenga integradore en la función de tranferencia de lazo abierto GH, un itema de Tipo tendrá integrador en GH, un itema de tipo N tendrá N integradore en GH. 36
138 37 ( ( lim H G K p p K e ( ( lim H G K v v K e ( ( lim H G K a a K e Todo lo que e ha vito para itema con realimentación unitaria, puede entonce aplicare a itema con realimentación no unitaria teniendo en cuenta lo anterior.
139 3. Dede el punto de vita de la F.T. de lazo cerrado. Si e upone una función de realimentación H( tal que H K H H ( ( lim Se etá comparando (en etacionario la entrada de referencia r(t con un valor K H vece la alida c(t. Si e toma entonce el error como: ( ( ( t c t r K t e H E decir ( ( ( C R K E H Se puede etablecer como relación general que: [ ] ( ( ( ( ( R F K K C R K E H H H 38
140 Si la FT en Lazo Cerrado F( no preenta polo en el origen, u expreión general e: m n a a a b b b b R C F n n n m m m m ( ( ( En etacionario el error e [ ] ( ( lim ( lim R F K K E e H H E decir: (... ( (... lim R a a a K b a b K a K e n n n H H n H 39 Y e puede etudiar el comportamiento ante la entrada de prueba:
141 Entrada ecalón R( R Que erá nulo i [ K b ] E decir a H F ( b a K H e K H K H b a Por ejemplo, para realimentación unitaria (K H e neceita que lo término independiente del numerador y del denominador de la FTLC, F(, ean iguale. R n Entrada rampa R... ( a b K H ( a bk R( e lim n n K H ( an... a a Error Condicione e a K H b y a K H b a K H b e R cte. a K H b y a K H b K a e H a K H b H R 4
142 Entrada parábola n R... ( a bk H ( a b KH ( a R( e lim 3 n n K ( a... a a H n b K H R Error Condicione e a K b para i, y e i a K H b R cte. a i K H bi para i y K a e H H i a i K H bi para i ó En la práctica cualquier itema con realimentación no unitaria e puede convertir en uno con realimentación unitaria, in má que colocar H en la trayectoria directa. R( - D( G( H( C( R( G( C( H( D( - 4
143 Si e upone una función de realimentación H( con un cero de orden n en el origen, e decir, en el que la alida deeada e proporcional a la derivada n-éima de la entrada de referencia Tomando n H H K ( lim El error queda como: ( ( ( C R K E n H Por ejemplo i n (un polo de H( en el origen, entonce la FT en Lazo Cerrado F( tiene aimimo un polo en el origen (a en u denominador. (... ( (... lim R a a K b a K b a K e n n n H H n H Que, en el cao de la entrada ecalón ( R R conduce a R a a K b a K b a K e n n n H H n H... ( (... lim 4
144 Error Condicione e a K H b y K b e a H a K H b R cte. K a a K H b y a K H b H e a K H b 43
145 4. Comparación de lo errore en etado etacionario de un itema en lazo abierto con lo de un itema en lazo cerrado. Vamo a comparar lo errore etacionario de lo itema en lazo abierto y lazo cerrado de la figura iguiente: LAZO ABIERTO R K c K T Planta C Calibración K c K LAZO CERRADO R K d K T C Planta 44
146 En el itema en lazo abierto la ganancia K c e calibra para que K c /K, con lo cual la función de tranferencia en lazo abierto e: ( K G c K T K K T T En el itema de control en lazo cerrado, la ganancia K d del controlador e etablece para que K d K>> G( K d K T Kd K T Suponiendo una entrada ecalón unitario, comparemo lo errore en etado etable para lo itema de control. Para el itema de control en lazo abierto, la eñal de error e: e( t r( t c( t En el dominio de Laplace: [ G( ] R( E( R( C( 45
147 El error en etado etacionario ante un ecalón unitario e: e lim E( lim [ G( ] G( En G( la ganancia de cadena directa del itema en lazo abierto e igual a la unidad, de modo que el error en etado etable e cero. Sin embargo, debido a lo cambio ambientale y al envejecimiento de lo componente la ganancia e alejará de la unidad conforme pae el tiempo y el error en etado etable ya no erá igual a cero, y perdurará hata que volvamo a calibrar el itema. 46
148 En lazo cerrado, la eñal de error e: en donde: G( E( R( C( R( G( Kd K T Ahora el error en etado etacionario ante un ecalón unitario e: e lim G ( G( Kd K En el itema en lazo cerrado, la ganancia K d e etablece como un valor muy grande en comparación con /K, con lo cual el error diminuye (aunque no e elimina, no e hace cero. 47
149 Si uponemo la iguiente variación en la función de tranferencia de la planta, coniderando K c y K d contante. K ΔK G ( T Supongamo para implificar que K, ΔK. El error en etado etable en la repueta ecalón unitario para el itema en lazo abierto e convierte en: e Kc( K ΔK ( K ΔK.. K Para el itema en lazo cerrado, i etablecemo K d como /K (K d, el error en etado etable en la repueta ecalón unitario e: e.99 G( Al variar la planta (KΔK e.9 G( ( K ΔK K La variación del error en lazo abierto e de. y en lazo cerrado e de.9. 48
150 Se ve como el itema de control en lazo cerrado e mejor que el itema de control en lazo abierto en preencia de cambio ambientale, envejecimiento de componente, etc. 49
151 5. El concepto de etabilidad. Como ya e ha mencionado anteriormente, la etabilidad de un itema lineal en lazo cerrado e define como la capacidad de un itema de reponder de forma acotada ante una entrada acotada. Se determina a partir de la ubicación de lo polo en lazo cerrado en el plano. Si alguno de eto polo e encuentra en el emiplano derecho del plano, conforme aumenta el tiempo, la repueta aumentará en forma monótona u ocilará con una amplitud creciente. E decir el itema erá inetable. Para tal itema, tan pronto como e conecta la alimentación, la alida aumenta con el tiempo, y i no ocurre una aturación en el itema y no e incluye una detección mecánica, el itema puede terminar por fallar. Si todo lo polo en lazo cerrado e encuentran a la izquierda del eje jω, cualquier repueta tranitoria acaba por alcanzar el equilibrio. Eto repreenta un itema etable. 5
152 Un itema que preenta un par de polo complejo conjugado de lazo cerrado obre el eje imaginario jω preenta una repueta ocilatoria de amplitud contante, ante una entrada ecalón. A eto itema e le coniderará no etable y por tanto no erán deeable. La etabilidad o inetabilidad de un itema e una caracterítica del mimo, e decir, no depende de la entrada ni de la eñal de excitación del itema. El problema de etabilidad aboluta e oluciona con facilidad al no elegir polo en lazo cerrado en el emiplano derecho de, incluyendo el eje jω. Un problema ditinto e el de la Etabilidad Relativa. El olo hecho de que todo lo polo en lazo cerrado e encuentren en el emiplano izquierdo del plano no garantiza caracterítica atifactoria de repueta tranitoria; e neceario que e encuentren en una región determinada del plano complejo, como la motrada en la figura: 5
153 Interea que lo polo del itema etén en ea zona en particular con el fin de que la repueta preente una caracterítica tranitoria aceptable (obreimpulo máximo, tiempo de etablecimiento, etc... Dado que la etabilidad relativa y el comportamiento en el tranitorio de un itema de control en lazo cerrado e relacionan directamente con el patrón de polo y cero en lazo cerrado en el plano, e neceario ajutar uno o má parámetro para obtener lo patrone conveniente. 5
154 6. Criterio de etabilidad de Routh-Hurwitz. Para etudiar la etabilidad no e neceario aber cuále on lo polo en lazo cerrado, bata conocer dónde e encuentran ituado. Dado que cai todo lo itema lineale en lazo cerrado tienen funcione de tranferencia de la forma: ( ( ( ( A B a a a a b b b b R C n n n n m m m m 53 donde a y b on contante y m<n; para encontrar lo polo en lazo cerrado lo que debemo hacer e factorizar A(.
155 Exite un criterio imple, etablecido por Routh y Hurwitz, que permite determinar la cantidad de polo en lazo cerrado que e encuentran en el emiplano derecho del plano in tener que factorizar el polinomio. Ete criterio ólo e aplica a lo polinomio con una cantidad finita de término. La información acerca de la etabilidad aboluta e obtiene directamente de lo polo de lazo cerrado, que on la raíce de A(. La ecuación A( e llama Ecuación Caracterítica. 54
156 El procedimiento en el criterio de la etabilidad de Routh e el iguiente: Se ecribe la ecuación caracterítica en la forma: n n a a... an an donde lo coeficiente on cantidade reale y e upone que a n Si alguno de lo coeficiente e cero o negativo, en la preencia de al meno un coeficiente poitivo, hay una raíz o raíce que on imaginaria o que tienen parte reale poitiva. En ete cao el itema no e etable y i ólo no interea la etabilidad aboluta no e neceario continuar con el procedimiento. E condición necearia pero no uficiente para la etabilidad que todo lo coeficiente del polinomio A( etén preente y tengan un igno poitivo. 55
157 Si todo lo coeficiente on poitivo e ordenan lo coeficiente del polinomio en fila y columna de la forma iguiente: g f e e c c c c... b b b b... a a a a... a a a a n n n n donde a a a a a b a a a a a b a a a a a b 56 Se igue el mimo patrón de multiplicación cruzada de lo coeficiente de lo renglone anteriore para evaluar el reto de coeficiente (c, d, e, etc...
158 c c c 3 ba ba ab b 3 ab b 5 3 ba ab b 7 4 d d cb cb bc c bc c Ete proceo continúa hata que e completa el n-éimo renglón. El criterio de etabilidad de Routh plantea que el número de raíce de la ecuación con parte reale poitiva e igual al número de cambio de igno de lo coeficiente de la primera columna. 57
159 Ejemplo: Se conidera el polinomio: Aplicando el dearrollo vito tenemo: Encontramo do cambio de igno en lo coeficiente de la primera columna, con lo cual tenemo do raíce con parte reale poitiva.
160 Cao epeciale. Si el término de la primera columna de cualquier renglón e cero, pero lo término retante no on cero, o no hay término retante, el término cero e utituye con un número poitivo muy pequeño ε y e evalúa el reto. Ejemplo: 3 Si el igno del coeficiente que etá por encima de cero (ε e igual al igno que etá debajo de él, quiere decir que hay un par de raíce imaginaria. Si el igno del coeficiente que etá por encima del cero (ε e opueto al que etá abajo quiere decir que hay cambio de igno. 3 ε 59
161 Si todo lo coeficiente de cualquier renglón on cero ignifica que exiten raíce de igual magnitud que e encuentran radialmente opueta en el plano. El dearrollo del iguiente renglón e continúa con la formación de un polinomio auxiliar con lo coeficiente del último renglón y mediante el empleo de lo coeficiente de la derivada de ete polinomio en el iguiente. Ejemplo: Si tenemo como ecuación caracterítica: Formamo el polinomio auxiliar P(: 4 P ( 48 5 Al er de grado 4 tendremo pare de raíce iguale y opueta, la cuale e obtienen con la derivada del polinomio. dp ( d 6
162 Coeficiente que utituimo en el renglón de Vemo que hay un cambio de igno en la primera columna, por lo cual la ecuación original tiene una raíz con parte real poitiva. 6
163 Análii de la etabilidad relativa El criterio de etabilidad de Routh proporciona la repueta a la pregunta de la etabilidad aboluta, pero eto en mucho cao no e uficiente ya que por lo general e requiere información acerca de la etabilidad relativa del itema. Un enfoque para examinar la etabilidad relativa e cambiar el eje del plano y aplicar el criterio de etabilidad de Routh. ˆ σ con σ cte E decir: ecribir el polinomio en término de ŝ y aplicar el criterio de Routh al nuevo polinomio. La cantidad de cambio de igno en la primera columna dearrollada para el polinomio ŝ e igual a la cantidad de raíce que e localizan a la derecha de la línea vertical -σ. 6
164 Ejemplo: Aplicación del criterio de etabilidad de Routh al análii de un itema de control El criterio tiene una utilidad limitada en el análii de un itema de control lineal porque no ugiere cómo mejorar la etabilidad relativa ni cómo etabilizar un itema inetable. Sin embargo, e poible determinar lo efecto de cambiar uno o do parámetro de un itema i e examinan lo valore que producen inetabilidad. Sea el itema de control: La función de tranferencia en lazo cerrado e: R - K ( ( C C( R( ( K ( K La ecuación caracterítica e: K 63
165 El dearrollo de coeficiente e convierte en: 4 3 K K 7 K K Para la etabilidad K debe er poitiva, y todo lo coeficiente de la primera columna también. 4 > K > 9 Cuando K4/9 el itema e vuelve ocilatorio y matemáticamente la ocilación e mantiene en una amplitud contante. 64
166 Tema 5 El lugar de la raíce.. Introducción y concepto.. Regla generale de contrucción del lugar de la raíce. 3. Configuracione comune de polo y cero y u lugare de la raíce. 4. Cao epeciale. 5. Análii de itema de control mediante el lugar de la raíce. 6. Sitema de fae no mínima. 7. Sitema con retardo de tranporte. 65
167 . Introducción y concepto. Método gráfico para repreentar la raíce de la Ecuación Caracterítica para todo lo valore de un parámetro del itema, generalmente la ganancia. (W. R. Evan. Habitualmente: El parámetro erá la ganancia de la F.T. en lazo abierto variando de cero a infinito. Se pueden predecir lo efecto de eta variación en la ubicación de lo polo de lazo cerrado. También e puede etudiar el efecto de añadir polo y cero en lazo abierto obre la ubicación de lo polo de lazo cerrado. 66
168 Idea báica R( - E( B( G( H( C( La FT en lazo cerrado e C( R( G( G( H ( ( La ecuación caracterítica: G ( H ( o bien: G ( H ( ( Donde e upone que G(H( e un cociente de polinomio en. Como G(H( e una cantidad compleja, la ecuación ( e puede poner en forma polar. Se obtiene aí do ecuacione: 67
169 Condición de ángulo: G(H( ±8º(k (k,,,... (3 Condición de magnitud: G ( H( (4 Generalmente G(H( e puede poner como: k( z ( z ( zm ( p ( p ( p G( H ( (5 Con lo que el lugar de la raíce e el lugar que van ocupando lo polo de lazo cerrado en el plano, cuando varía k. Para u contrucción e debe conocer la ubicación de lo polo y cero de G(H( (polo y cero de lazo abierto. Lo ángulo de la cantidade compleja que e originan a partir de lo polo y cero en lazo abierto para un punto de prueba e miden en entido contrario al de la aguja del reloj. n 68
170 Ejemplo: G( H ( k( z ( p ( p ( p ( p 3 4 Siendo p y p3 polo complejo conjugado. Ángulo G(H( φ -θ -θ -θ 3 -θ 4 ±8º(k Magnitud G ( H ( kb A A A A
171 Gráficamente: jw A θ A 4 B -p A 3 θ 4 A φ θ σ -p 4 -z -p θ 3 -p 3 Se ve como, al etar lo polo y cero conjugado ubicado imétricamente con repecto al eje real, lo lugare de la raíce on imétrico repecto al eje real. 7
172 . Regla generale de contrucción del lugar de la raíce. Lo pao a eguir en un cao general on:. Obtener la ecuación caracterítica G( H (. Ordenar eta ecuación para que el parámetro de interé aparezca como factor multiplicativo de la forma: k z p ( ( ( ( ( ( z p m z p n (6 7
173 3. Situar lo polo y cero de G(H( en el plano. Se quiere hacer variar k de cero a infinito. Para ello e puede ecribir la ecuación (6 como n j ( p ( j k zi m i (7 Cuando k la raíce de (6 on lo polo (p j y cuando k tiende a infinito, la raíce de (6 on lo cero (z i. La ramificacione del lugar de la raíce empiezan en lo polo de lazo abierto y terminan en lo cero (cero finito o infinito i hay má polo que cero. 4. Determinar lo lugare de la raíce obre el eje real. Para ello e hallan lo polo y cero reale de la función de tranferencia en lazo abierto. Un punto en el eje real pertenecerá al lugar de la raíce i a u derecha hay un número impar de polo y cero reale. 7
174 5. Determinar la aíntota de lo lugare de la raíce. Si hay m cero y n polo, habrá Nn-m lugare de la raíce que vendrán del infinito. Eto lugare e aproximan a línea recta (aíntota. Se caracterizan por el ángulo que forman y por el punto de corte con el eje real. jw De la condición de ángulo φ -θ -θ -θ 3 -θ 4 α(m-n±8º(k A θ A 4 B A 3 -p Ángulo de aíntota θ 4 -p 4 -z A φ θ -p θ 3 σ ± 8º (k m n α (8 -p 3 73
175 Para localizar el punto en el que cruzan el eje real: m m k ( z z zm zz G( H( n n p p p p p ( z ( n pn Si el punto etá muy alejado, realizando el cociente: G ( H( n m m n m Para muy grande podemo aproximar por: k n [( p p p ( z z z ] ( p p p ( z z z n m n m n m m La abcia de interección con el eje real erá σ a σ a ( umadepolo ( umadecero n -m (9 74
176 6. Encontrar lo punto de alida y de llegada. Eto punto e encuentran en el eje real o en pare complejo conjugado. - Si el LR e ubica entre do polo adyacente obre el eje real, exitirá al meno un punto de alida entre ello. - Si el LR e ubica entre do cero adyacente obre el eje real, exitirá al meno un punto de llegada entre ello. De la ecuación caracterítica: f ( B( ka( ( Lo punto de alida y llegada correponden a raíce múltiple de la E.C. En eto punto e cumple: df ( d df ( d B' ( ka' ( k B' ( A' ( 75
177 Sutituyendo en (: B ( A' ( B' ( A( ( como k B( A( dk B' ( A( B( A'( d A ( Se ve que e obtiene la mima ecuación (. 7. Determinar lo ángulo de entrada (alida a partir de un cero complejo (polo complejo. Se encuentran retando a 8º la uma de todo lo ángulo de vectore, dede todo lo otro polo y cero hata el cero complejo (polo complejo en cuetión, incluyendo lo igno apropiado. Ángulo de alida 8º - (uma ángulo de vectore dede otro polo a éte (uma ángulo de vectore dede lo cero a ete polo Ángulo de llegada 8º- (uma ángulo de vectore dede otro cero a éte (uma ángulo de vectore dede lo polo a ete cero 76
178 8. Determinar punto de cruce con el eje imaginario. Se obtienen aplicando el criterio de Routh. Por ejemplo: 3 3 K 6 - k 3 k El valor de k que iguala a cero el término de la primera columna e k6. Lo punto de cruce con el eje imaginario e encuentran depejando la ecuación auxiliar obtenida de la fila : 3 k 3 6 ± j 3 3 k 9. Seleccionar punto de prueba y aplicar la condición del ángulo. 77
179 Ejemplo Para el itema iguiente e pide trazar el Lugar de la Raíce y obtenga el valor de k para el cual ξ.5: k G ( H ( k ( ( La condición del ángulo e: G( ± 8º(k k La condición de magnitud: G ( ( ( 78
180 PASO : Lugare obre el eje real. Lo polo en lazo abierto on:, -, -. Punto en el eje real poitivo: Total No e cumple la condición. No pertenece al L.D.R. Punto entre y. Total -8-8 Se cumple la condición. Pertenece al L.D.R. Punto entre y Total-36x(-8 Punto entre y -. No e cumple la condición. No pertenece al L.D.R. Pertenece al L.D.R. 79
181 PASO. Aíntota lim G( lim ( k ( lim k 3 La condición del ángulo e convierte en: -3 ±8º(k Lo ángulo de la aíntota on 6º, -6º, y 8º. Veamo en qué punto corta al eje. Para un punto muy lejano: como G(-: 3 3 k G ( 3 3 k Que para muy grande e puede aproximar por: ( 3 El punto de corte e (-, 8
182 PASO 3. Punto de ruptura o deprendimiento. ( k ( k ( 3 3 dk d (3 6 Luego:.46 y
183 PASO 4. Cruce con el eje imaginario. Tenemo 3 3 k aplicando Routh 3 3 k 6-k 3 k Para k6 el término en e hace cero: Para la fila 3 k 3 6 de donde ± j También e podría haber hallado 3 haciendo: ( jw 3( jw ( jw k luego w ± k 6 PASO 5. Tomar punto e ir comprobando lo criterio del ángulo y magnitud. 8
184 El último punto que e pide e determinar k de forma que ξ valga.5. Lo polo en lazo cerrado con ξ.5 e encuentran obre la línea que paan por el origen y forman ángulo de ±arcco(ξ±arcco(.5±6º. P ω n ξ ξ θ ω n ω n j.578 y j.578 P El valor de k que da eto polo e: k ( (.3337 j (el tercer polo ería entonce
185 4 Root Locu 3 Imaginary Axi Real Axi 84
186 3. Configuracione comune de polo y cero y u lugare de la raíce. 85
187 4. Cao epeciale 4..- k no aparece como factor multiplicativo en GH. Ejemplo: GH ( ( ( 4 k Tomando Kk, entonce la ecuación queda como: 3 Que e puede poner como: El LDR de eta ecuación e: 5 K K que tiene la forma habitual
188 4..- Sitema con realimentación poitiva. En itema de control complejo podemo tener lazo con realimentación poitiva: - R( C( G ( G( H( H ( (El lazo interno e etabiliza con el externo. Para el lazo interno, la ecuación caracterítica e: -G(H( El método en ete cao e parecido, pero debe alterare la condición del ángulo, que queda: G(H( º±36º Se modifican la regla: 87
189 4. Si el número de polo y cero a la derecha del punto de prueba e par, ete punto pertenece al LDR. 5. Ángulo de la aíntota ± k36º n m 7. Al calcular el ángulo de alida de un polo, e debe retar de º, la uma de todo lo ángulo de lo vectore que parten dede lo otro polo y cero con u igno correpondiente. 88
190 5. Análii de itema de control mediante el lugar de la raíce Sitema condicionalmente etable. Sea por ejemplo el iguiente itema: R( - K( 4 (4(6(.4 C( Su gráfica del LDR e: Dependiendo del valor de la ganancia el itema puede er o no etable 89
191 5..- Efecto de añadir un cero en lo LDR. Tomaremo como función de tranferencia en lazo abierto: k( z G ( H ( ( k, p > p > p3 >, z > ( p( p ( p3 Se han de examinar lo LDR para eto 3 cao: Cao : z > p > p > p3 Cao : p > p > p3 > z Cao 3: p > z > p > p3 Un itema con 3 polo en lazo abierto preenta el LDR iguiente:
192 Al añadir un cero a ete itema el LDR e deplaza hacia la izquierda, e decir el itema tiende a er má etable: Cao : z > p > > p p
193 Cao : p p > p > > 3 z
194 Cao 3: p > z > p > p
195 5.3.- Efecto de añadir un polo en lo LDR. Al añadir un polo al itema el efecto e el contrario al del cao anterior. El LDR e deplaza hacia la derecha, produciendo una deetabilización del itema y haciéndolo má rápido Sitema diferente con igual LDR. El LDR no da información obre i un itema e etable o no pero no obre cómo erá u repueta tranitoria. Sean por ejemplo lo do iguiente itema: R( C( 5(.8 - (5 R( - 5 (5 C( (.8 94
196 Eto do itema tiene la mima función de tranferencia en lazo abierto: 5(.8 G ( H ( (5 Preentan do polo y un cero en lazo abierto, u lugar de la raíce e:
197 En lazo cerrado ambo preentan do polo en.5 ± j. 866, pero el primero preenta ademá un cero en. 5 y el egundo no Eo e traduce en la repueta de la forma iguiente:.4. Sitema º (con un cero Repueta ante ecalon Sitema º (in cero.8 amplitud tiempo (ec 96
198 6. Sitema de fae no mínima. Lo itema que tienen todo u polo y cero en el emiplano izquierdo del plano e le llama itema de fae mínima y a lo que tienen algún cero o algún polo en el emiplano derecho, itema de fae no mínima. En eto itema hay que tener cuidado al realizar el Lugar de la Raíce porque puede ocurrir que lo criterio cambien. 97
199 Por ejemplo: R( K(-5 - ( C( Que tiene un cero en. En la figura puede vere u LDR. En él puede obervare, por ejemplo, que el criterio del LDR en el eje real ahora e el contrario que el que e ha empleado anteriormente
200 La figura muetra lo que ucede: R( K(-5 - ( C( X -. Como puede vere el vector correpondiente.5 al cero e un vector con entido opueto. El ángulo que forma e el que e ha llamado θ α no real α real, que vale (8ºα no real. (Se ha θ llamado α no real al valor que tendría el ángulo i el vector tuviee el entido habitual α real Por tanto en el criterio del ángulo hay que añadir eto 8º, ya que iempre trabajamo con lo ángulo tomado como el denominado α no real. Sin embargo, i el cero no fuee ( 5, i no que fuee ( 5 que i fuee de fae mínima. Igualmente, i en vez de tener un nº impar de cero del tipo ( 5, el criterio ería el mimo, tuviéemo un nº par, el ángulo que habría que aportar al criterio ería 8º*k, e decir k vece 36º, con lo cual el criterio también quedaría como en lo itema de fae mínima. 99
201 7. Sitema con retardo de tranporte Supongamo que e quiere trazar el LDR para un itema dado por: T Ke G( H ( (4 Para eto itema hay que modificar la regla de contrucción vita previamente. Aí: El número de ramificacione e infinito, dado que preenta un número infinito de raíce. El número de aíntota e también infinito y paralela al eje real. La condición del ángulo e convierte en: El ángulo debido a: Ke T T e e T e - T e ωt ± 8 º(k k,,,.. (5 T σt jωt jωt e e e (radiane 57.3ωT co ωt (grado jenωt
202 con lo que la condición del ángulo queda: 57.3ω T ± 8º(k k,,,.. ± 8º 57.3ωT (6 Como raíce. T e e cero para ω, el eje real (dede - a - forma parte de lo lugare de la
203 Dando valore a ω e puede ir calculando lo punto del lugar de la raíce. Para diferente valore de k, e obtienen todo lo lugare de la raíce, i bien el má importante e la ramificación primaria para k.
204 8.- Gráfica de contorno de la raíce Cuando e realiza un lugar de la raíce haciendo variar do o má parámetro, e obtiene lo contorno de la raíce. Tomemo por ejemplo el itema de la figura: R( K C( - (a Su ecuación caracterítica e: a k a k que e puede reecribir como: Se halla primero el lugar de la raíce para a, haciendo variar k de a. Depué e halla el lugar de la raíce para kcte y a variando de a. Finalmente e obtiene el contorno de la raíce 3
205 Lo contorno de la raíce empiezan en lo polo de la función de tranferencia y terminan en u cero. 4
206 Tema 6 Repueta en frecuencia.. Concepto de repueta en frecuencia.. Diagrama de Bode. 3. Diagrama polar. 5
207 . Introducción. Concepto de repueta en frecuencia. La repueta en frecuencia de un itema e la repueta que preenta dicho itema en etado etacionario ante una entrada enoidal. Eta repueta del itema e analiza para diferente frecuencia de la enoide. En un itema lineal, la alida ante una entrada enoidal e también una eñal enoidal. Únicamente difiere en la amplitud y ángulo de fae: x(t X( G( y(t Y( x(txen(ωt y(tyen(ωtφ Siendo: YX G(jω φ G(jω arctg[imag(g(jω/real(g(jω] E decir 6
208 Ventaja: - La obtención experimental de la repueta en frecuencia e encilla. - Permite dieñar itema coniderando lo efecto del ruido. Deventaja: - El dominio de la frecuencia carece de una conexión directa con el dominio temporal Gráfico de repueta en frecuencia La función de tranferencia enoidal, función compleja de la frecuencia, e caracteriza por u módulo y ángulo de fae, con la frecuencia como parámetro. Tre repreentacione gráfica uuale on: - Diagrama de Bode - Diagrama de Nyquit o polare - Diagrama del logaritmo de la magnitud frente a la fae. 7
209 . Diagrama de Bode.. Definición Etán formado por trazado: Logaritmo de la magnitud de la función de tranferencia enoidal (en decibelio: db: log G(jω (db Fae de la función de tranferencia enoidal. Al repreentar la magnitud en decibelio (db el producto e convierte en uma y la diviión en reta. Se repreenta en forma emilogarítmico: con ecala logarítmica para la frecuencia, y lineal para la magnitud y la fae. La frecuencia e repreenta normalmente por década, e decir epaciando lo valore en valore de frecuencia:.,,,,, etc en el intervalo que no interee repreentar. Al tranformar lo producto en uma y la diviione en reta, podemo etudiar cómo repreentar la gráfica de término imple y obtener la de lo término má complejo como uma de la gráfica de lo primero. 8
210 Aí, lo término imple que e etudiarán on: - Una ganancia K. - Factore integral y derivada. - Factore de primer orden. - Factore de egundo orden. 9
211 . Diagrama para término imple. Ganancia (K Un valor de K mayor que tiene un logaritmo poitivo y un valor de K entre y lo tiene negativo. En cualquier cao u gráfica e una recta de pendiente cero, y de valor log(k. La fae de K e, luego u gráfica e otra recta de pendiente que paa por.
212 Factore integral y derivada El término integral e de la forma jω Su magnitud (en decibelio correponde a:. log logω db j ω La fae e contante e igual a 9º. Tomando la frecuencia en diviione de década, la pendiente de la recta log ω e de db/década. El término derivada e de la forma j ω Su magnitud (en decibelio correponde a: log j ω logω db La fae e contante e igual a 9º. Tomando la frecuencia en diviione de década, la pendiente de la recta log ω e de db/década.
213 Gráficamente:
214 Si la función de tranferencia contiene el término la magnitud logarítmica e convierte en: jω n o ( jω n - n log(jω para n n log(jω para jω Se tiene como reultado recta de pendiente: n db/década para el primero n db/década para el egundo. ( n La curva de fae erán recta con: pendiente cero de valor ( 9 x nº y (9 x nº repectivamente. jω 3
215 Factore de primer orden Son de la forma ( jωt Para el primero la magnitud e: jωt o ( log log ω T ( jωt db Para frecuencia baja (ω<</t, ee valor de la magnitud e puede aproximar por: log ω T log db Mientra que para frecuencia alta (ω>>/t la poible aproximación e: log ω T logωt db Eto permite aproximar la curva real por do aíntota que e cruzan en la frecuencia de corte o de equina: ω T 4
216 La fae tiene el valor: φ arctg( ωt Que para frecuencia próxima a vale º y para frecuencia grande 9º. Para la frecuencia de equina: Gráficamente: T φ arctg 45º T 5
217 Para el egundo ( jωt la magnitud e: log ( jω T log ω T db Para frecuencia baja (ω<</t, la magnitud e puede aproximar por: log ω T Y para frecuencia alta (ω>>/t: log db log ω T logωt Como ante, e puede aproximar la curva real por do aíntota que e cruzan en la frecuencia de corte o de equina ω T db 6
218 La fae tiene el valor: φ arctg( ωt Para frecuencia próxima a vale º y para frecuencia grande vale 9º. Para la frecuencia de equina: φ arctg 45º Gráficamente: T T 7
219 Factore cuadrático Son de la forma: ± n n j j ω ω ω ω ζ Se etudiarán lo factore n n j j ω ω ω ω ζ por er lo má habituale (el etudio de lo otro erá imilar al de éto. 8
220 La magnitud erá: log ω ωn ω ζ ωn Que, para frecuencia baja ω<<ω n,queda: log( db (La aíntota a baja frecuencia e entonce una recta horizontal en db. Para frecuencia alta (ω>>ω n, queda: ω log ω (La aíntota e una recta de pendiente 4dB/década. ω 4log db n ω n La do aíntota interectan en ωω n, que erá la frecuencia de corte o de equina. 9
221 El ángulo de fae: n n n n arctg j j ω ω ω ω ζ ω ω ω ω ζ φ Para ω φº Para ωω n φ-9º para ω φ-8º La curva exacta difieren de la aíntota en ete cao má que en lo factore de primer orden. Van a depender ademá de ζ, en función de u valor preentan un pico de mayor o menor tamaño.
222 Curva de ζ ω j ωn ω j ωn
223 La frecuencia de reonancia e: ω ω ζ (para ζ. 7, itema ubamortiguado. Para ζ próximo a cero ω r ω n. r n Para valore de ζ. 77 ω r e menor que ω d. ( ω ω ζ Para ζ>.77 no hay pico de reonancia. d n Para ζ. 77 el valor del pico de reonancia e: M r G( jω G( jω r max ζ ζ Para ζ >. 77 M r Conforme ζ tiende a cero M r tiende a infinito. Si a un itema e le excita con u frecuencia de reonancia, la ocilacione crecen en amplitud. Si a un itema con coeficiente de amortiguamiento nulo e le excita con u frecuencia natural, la magnitud de G(jω e hace infinita.

224 Ejemplo de excitación con frecuencia de reonancia: Puente de Tacoma (94 3
225 4
226 .3.Procedimiento general de trazado de diagrama de Bode. - Ecribir la función de tranferencia enoidal como un producto de factore báico. - Identificar la frecuencia de equina aociada a cada factor. 3- Dibujar la curva aintótica de magnitud logarítmica con la pendiente adecuada. 4- La curva exacta e obtiene agregando la correccione adecuada. 5
227 Por ejemplo: 6
228 7
229 8
230 .4. Sitema de fae mínima y de fae no mínima. Lo itema de fae no mínima tienen la mima curva de magnitud que u homólogo de fae mínima, pero ditinta fae. En lo itema de fae mínima, la caracterítica de magnitud y ángulo de fae e relacionan de forma única. En lo de fae no mínima no ocurre aí, dependerá del número de polo o cero en el emiplano derecho. 9
231 Aí: Para un itema de fae mínima el ángulo de fae en ω e convierte en 9º(q-p, donde p y q on lo grado de lo polinomio del numerador y denominador repectivamente. En un itema de fae no mínima no e aí. En un itema cualquiera la pendiente de la curva de la magnitud logarítmica en ω e (q-p. Por tanto e poible detectar i el itema e o no e de fae no mínima, analizando la fae y la pendiente de la magnitud logarítmica para valore alto de la frecuencia. Lo itema de fae no mínima on lento en u repueta, por lo tanto i e deea que el itema ea rápido, deben evitare en lo poible uar componente de fae no mínima. 3
232 Aí, por ejemplo tomemo do itema con la configuración que e muetra G ( T T G ( T T 3
233 La curva de fae para eto do itema on: 3
234 También: Para un itema de fae mínima el ángulo de fae en ω e convierte en 9º * nº integradore ó 9º * nº derivadore. En un itema de fae no mínima no e aí. En un itema cualquiera la pendiente de la curva de la magnitud logarítmica en ω e * nº integradore ó * nº derivadore. 33
235 .5. Sitema con retardo de tranporte. El retardo de tranporte preenta un atrao de fae exceivo in atenuación en alta frecuencia. Fae G(jω -ωt(rad Magnitud G(jω e -jωt co ωτ en ωτ db Lo anterior e puede emplear viendo que, i en un gráfico de Bode, la fae calculada difiere en velocidad contante con la obtenida experimentalmente, entonce, el itema preenta un retardo de tranporte. 34
236 .6. Determinación experimental de Funcione de Tranferencia. Si e upone que el itema e de fae mínima y i e uan la aproximacione aintótica Comprobar que e de fae mínima: Ángulo-9(q-p Dibujar la aproximacione aintótica, que deben tener pendiente múltiplo de db/década. Aí: 35
237 Un cambio en ωω de la pendiente de a 4 db/década, indica que exite el factor ω ω j Un cambio en ωω de la pendiente de 4 a db/década, indica que exite el factor ω ω j Un cambio en ωω de la pendiente de 4 db/década, indica que exite el factor ω ω ω ω ζ j j (ζ e determinaría a partir del pico de reonancia. 36
238 Para itema de tipo, a baja frecuencia G ( jω La aíntota de baja frecuencia e una línea horizontal en log K. Para itema de tipo, a baja frecuencia G ( jω La aíntota de baja frecuencia e una línea con pendiente db/dec. y que corta a la línea db en ω K. Para itema de tipo, a baja frecuencia G ( jω K K jω K ( jω La aíntota de baja frecuencia e una línea con pendiente 4dB/dec. y que corta a la línea db en ω K 37
239 SISTEMA TIPO SISTEMA TIPO SISTEMA TIPO 38
240 Ejemplo: Obtener la función de tranferencia de un itema cuyo diagrama de Bode e: Solución: G( (3 59( (. (. 39
241 3.- Diagrama polar. El diagrama polar de una función G(jω e una gráfica en la que e repreenta la magnitud de G(jω frente a la fae de G(jω en coordenada polare, egún ω varía de cero a infinito. Ventaja: Indica en una mima gráfica la caracterítica de repueta en frecuencia del itema Deventaja: No indica explícitamente la contribución de todo lo factore individuale. (Se pierde información. Lo ángulo de fae poitivo (negativo e miden en el entido contrario (mimo entido a la aguja del reloj, a partir del eje real poitivo. 4
242 Lo diagrama correpondiente a alguno término imple on: Factore integral y derivada La traza polar de: e el eje imaginario negativo, pue: jω G(jω (/ω - 9º jω e el eje imaginario poitivo Factore de primer orden Para el factor jωt ( e tiene: Módulo ω T Fae arctg( ωt (Para ω, G(jω tiene módulo y fae º (Para ω, G(jω tiene módulo y fae -9º (Para ω/t G(jω tiene módulo y fae 45º Para el factor ( jωt e tiene: Módulo ω T Fae arctg( ω T 4
243 E decir: ( jωt ( jωt Semicírculo C(.5, y radio.5 4
244 Factore cuadrático Para término de la forma n n j j ω ω ω ω ζ Se tiene Para ω, G(jω tiene módulo y fae º Para ω, G(jω tiene módulo y fae 8º. Para término de la forma n n j j ω ω ω ω ζ Se tiene Para ω, G(jω tiene módulo y fae º Para ω, G(jω tiene módulo y fae 8º. 43
245 44 n n j j ω ω ω ω ζ Tomando valore intermedio e obtiene la gráfica, en la que e ve que depende del valor de ζ. Cuando ζ vale >> el diagrama e aproxima a un emicírculo, e decir el itema tiende a comportare como uno de primer orden. n n j j ω ω ω ω ζ
246 Retardo de tranporte Para G(jωe -jωt co(-ωtj en(-ωt co(ωt - j en(ωt El módulo e y la fae -ωt E decir: 45
247 Forma generale de la traza polare Dependiendo del tipo de G(jω : La forma de lo diagrama polare pueden variar, dependiendo de la diferencia de grado entre el numerador y el denominador, i bien el ángulo (la fae en Bode en ω depende ólo del tipo de G(jω. 46
248 Reumen: Sitema de fae mínima: K( jwta ( jwtb... G( jw λ ( jw ( jwt ( jwt... Tipo comienza en un valor finito Angulo º Tipo comienza en un valor infinito Angulo -9º Tipo comienza en un valor infinito Angulo -8º Tipo 3 comienza en un valor infinito Angulo -7º derivador comienza en cero Angulo 9º derivadore comienza en cero Angulo 8º 47
249 Si el itema e de la forma: n m comienza en cero Angulo -9º n-m comienza en cero Angulo -8º n m comienza en cero Angulo -8º n m 3 comienza en cero Angulo -7º m m b ( jw b ( jw G( jw n n a ( jw a ( jw
250 49
251 Tema 7 El Criterio De Etabilidad De Nyquit.. Introducción.. El Teorema de Cauchy. 3. El Criterio de Etabilidad de Nyquit. 4. Etabilidad relativa: Margen de Fae y Margen de Ganancia. 5. Relación entre la repueta tranitoria a un ecalón y la repueta en frecuencia de un itema de egundo orden en lazo cerrado. 5
252 - Introducción. Para analizar la etabilidad de un itema, el diagrama de Bode puede no er un método adecuado en determinado itema. Por ello e utiliza el criterio de etabilidad de Nyquit, baado en el Teorema de Cauchy de variable compleja..- Teorema de Cauchy. Supongamo una función F(, donde e una variable compleja y upongamo que F( tiene P polo y Z cero. Si en el plano tomamo un contorno cerrado que englobe todo lo polo y cero de F( (y que no atraviee por ningún polo ni ningún cero, al aplicar ete contorno cerrado en el plano F(, obtenemo un nuevo contorno cerrado que rodea al origen de F( N vece, iendo N Z - P. Evidentemente e debe tomar un entido de giro para el contorno. Se puede tomar como entido poitivo el de la aguja del reloj. 5


253 Ejemplo: Si F( La función F( preenta un cero en -.5. Se toma un contorno cerrado en el plano como el de la figura. Su correpondiente contorno en el plano F( e el motrado. Llamando a la variable σjω, u tranformación a un punto en F(S e F(ujv, donde: ujv(σjω Por tanto uσ vω De acuerdo a eto, el contorno en F( e también un cuadrado como el del plano pero de magnitud doble y deplazado una unidad a la derecha en u. Vemo que como el contorno en rodea al punto.5 en el entido de la aguja de reloj, el contorno correpondiente en F( rodea al origen vez en el entido de la aguja del reloj. 5

254 Ejemplo: Si ahora F( Se puede contruir una tabla con valore de y u correpondiente de F(. σjω j -j -j --j - -j j F(ujv 4 j 4 j j -j - j 3 Lo contorno en lo plano y F( on lo que e muetran en la figura: 5 j 5 Como el contorno en olamente rodea al cero, y no al polo, el contorno en F( gira una vez alrededor del origen. 53


255 Si tomamo F(. 5 con el mimo contorno en, ahora el contorno en rodea al polo y al cero de F(, y por lo tanto el contorno tranformado en F( no rodea al origen, ya que N Z P. 54
256 3.- Criterio de Nyquit. Se trata de aplicar el Teorema de Cauchy al cao de la etabilidad de lo itema en lazo cerrado. Interea que la función G(H( (ecuación caracterítica no tenga ningún cero en el emiplano derecho del plano. Se puede tomar un contorno en el plano que englobe todo el emiplano derecho y analizar el contorno aplicado en el plano G(H(. 55
257 Si ete contorno rodea al origen, habrá que tener en cuenta que: NZ-P Si rodea en entido poitivo el origen, entonce e que hay algún cero en el emiplano derecho, por tanto el itema en lazo cerrado e inetable. Si rodea en entido negativo el origen, tanta vece como polo de G(H(, erá etable; i lo rodea en entido negativo meno vece que polo, entonce e que hay algún cero y el itema e inetable. Como utilizar la función G(H( no uele er encillo, lo que e hace e tomar la función G(H(. Al tomar G(H(, el criterio cambia y en vez de analizar la vuelta alrededor del origen, en el plano G(H( e analizan la vuelta del contorno alrededor del punto j. 56
258 El criterio de Nyquit e pude reumir de eta forma: ZNP Z número de cero de G(H( en el emiplano derecho. N número de vuelta alrededor del punto j en entido de la aguja del reloj. P número de polo de G(H( en el emiplano derecho de. Para que el itema ea etable Z. Si P no e cero para que el itema ea etable N-P (e decir el número de giro alrededor del punto j debe er igual a P pero en entido contrario a la aguja del reloj. Si P, entonce ZN El punto j no debe er rodeado por el contorno en el plano G(H(. 57
259 Ejemplo: G( H ( ( Para contruir el contorno de Nyquit creamo una tabla o podemo ayudarno del diagrama de Bode ω..76 Módulo de GH(jw Fae de GH (jw Se ve que N. Como P, eto indica que Z, por lo tanto el itema e etable. 58
260 En itema que tengan polo en lazo abierto en el origen, el contorno a utilizar debe cambiar, para evitar que pae obre lo polo. Ejemplo: G ( H ( ( El diagrama de Bode e: y el de Nyquit: Se ve como el contorno en GH(jω da do vuelta alrededor del punto j en entido de la aguja del reloj. Como P, entonce Z y por tanto el itema e inetable. (En efecto el itema en lazo cerrado tiene 3 polo: - y.5±.66j, de lo cuale etán en el emiplano derecho de. Para itema que tienen polo imaginario puro en lazo abierto, hay que tomar también un contorno que lo evite. 59
261 4.- Etabilidad relativa: Margen de fae y margen de ganancia. En un itema no ólo e neceita que ea etable, ino también que mantenga uno márgene de eguridad, de forma que ante poible variacione de la planta iga iéndolo. Eto e lo que e conoce como Etabilidad relativa. Se define mediante do parámetro: el Margen de Ganancia y el Margen de Fae. Se emplean relacione en el diagrama polar como la que e muetran: G(j w φ Φ P G(j w ϕ 6
262 Margen de Ganancia: E el incremento de la ganancia del itema que habría que aportar cuando la fae e 8º para que el itema e hiciera marginalmente etable (el diagrama polar pae por el punto j. Si ω e la frecuencia (cruce de fae a la cual la fae del itema e 8º, entonce el margen de ganancia e: Kg G( jω Expreado en decibelio, el margen de ganancia e poitivo i el itema e etable, y negativo i e inetable. Margen de fae: E el ángulo de fae que habría que aportar para que el itema con magnitud unidad ( GH(jω cruce el eje imaginario. Si el itema a frecuencia ω (cruce de ganancia preenta GH(jω y fae φ, el margen de fae e: γ8φ 6
263 SISTEMA INESTABLE SISTEMA ESTABLE 6

264 Gráficamente: BODE POLAR MAGNITUD-FASE INESTABLE ESTABLE 63
265 5.- Relación entre la repueta tranitoria a un ecalón y la repueta en frecuencia de un itema de egundo orden en lazo cerrado. Conidéree el itema de la figura w n ( ξw n Cuya función de tranferencia en lazo cerrado e: C( R( ω n ξω n ω n Correpondiente a un itema de egundo orden. En él: Pico de reonancia M r M r ξ ξ Frecuencia de reonancia ω r ω r ω n ξ (recordar que ω r olamente e real i ξ<.77. Para valore mayore que éte, no hay pico de reonancia. 64
266 La repueta a un ecalón unitario del itema en lazo cerrado anterior e: ξω t ( ξ n c t e coω dt enω t, para t d donde ω ω ξ ξ d n El obrepico máximo que e obtiene e: M p e (ete obrepico e exceivo para valore de ξ<.4. La función de tranferencia de lazo abierto del itema anterior e: G( ω n ξπ ξ ( ξω Se puede calcular el margen de fae del itema a partir de la función de tranferencia de lazo abierto. n 65
267 La frecuencia de cruce de ganancia e: 4 ω ω 4ξ ξ n que e obtiene igualando G ( jω y depejando ω. Para eta frecuencia, la fae e: ( jω jω jω ξω 9 arctg G n 4ξ ξ 4 ξ Por lo tanto el margen de fae del itema e: 4 4ξ ξ γ 8º G( jω 9º arctg arctg ξ ξ 4 4ξ ξ Ecuación eta última en la que e relacionan el margen de fae y el coeficiente de amortiguamiento de un itema de egundo orden. 66
268 La figura iguiente muetra la relación entre el margen de fae y el coeficiente de amortiguamiento dada por eta ecuación. 9 Relación entre el MF y el Coef. Amortiguamiento en un it. de º orden Mar gen de 5 fa e Coef. Amoriguamiento 67
269 Se oberva que:. Eta relación e cai lineal entre lo valore y.6 del coeficiente de amortiguamiento ξ, egún la ecuación: γ ξ. Lo valore de ω r y ω d on cai iguale para valore de ξ pequeño. Para valore pequeño de ξ la frecuencia ω r e indicativo de la velocidad de repueta. (Se recuerda de nuevo que ω r olamente e real i ξ< Cuanto má pequeño e ξ mayore on M p y M r. Para valore de ξ>.4 hay una relación parecida entre M p y M r, para valore má pequeño de ξ, M p tiende a y M r tiende a infinito. 68
270 E decir: 3 Curva de Mr y Mp frente al coef. de amort. en un it. de º orden.5 Mp Mr Coef. Amoriguamiento 69
271 La relacione matemática que etablecen la relación entre u repueta temporal y la repueta en frecuencia para un itema de º orden e pueden obtener exactamente. Para itema de orden uperior eto ya no e tan encillo. Únicamente, i en ete itema de orden uperior, exiten polo dominante, entonce podrá extendere a ete itema la concluione obtenida para un itema de º orden. Aí, para itema de orden uperior con do polo dominante:.- M r e indicativo de la etabilidad relativa. Generalmente la repueta tranitoria e buena i: < M r <.4 ( db < M r < 3 db, que correponde a.4 < ξ <.7..- El valor de ω r e indicativo de velocidad en la repueta tranitoria. Cuanto mayor e ω r má rápido e el itema. 3.- La frecuencia de reonancia ω r y natural amortiguada ω d on muy próxima para valore pequeño de ξ. 7
272 Frecuencia de corte y ancho de banda. Se denomina frecuencia de corte a la frecuencia ω c a la cual la repueta en frecuencia de lazo cerrado etá 3dB por debajo de u valor a frecuencia cero Ancho de banda C R ( jωc ( jω c ( j ( C 3dB R j wc El ignificado e que el itema en lazo cerrado filtra la componente de la eñal con frecuencia uperiore a la frecuencia de corte y tranmite la componente con frecuencia inferiore a la de corte. 7
273 El rango de frecuencia ω ω c e denomina ancho de banda. El ancho de banda indica la velocidad de repueta del itema. Un ancho de banda grande correponde con un itema rápido (tiempo de crecimiento pequeño. Un ancho de banda de grande implica también que el itema no filtra el ruido de alta frecuencia. 7
274 Tema 8 Accione báica de control.. Introducción.. Control Proporcional. 3. Control Integral. 4. Control Proporcional-Integral 5. Control Proporcional-Derivativo 6. Control Proporcional-Integral-Derivativo. 7. Controladore Electrónico Analógico. 8. Método práctico de ajute de controladore PID 8.. Regla de Ziegler y Nichol. 8.. Método de la ganancia última Regla de ajute de Chien, Hrone and Rewick Concluione 9. Rede de compenación. 9.. Controlador de adelanto. 9.. Controlador de atrao Controlador adelanto-atrao. 73
275 .- Introducción. Una planta controlable dipone de una erie de actuadore que logran modificar medida de lo parámetro de la planta. Ejemplo: Interruptor de calefacción (actuador para modificar la temperatura de un local (medida planta. Problema de control: Se deea controlar una medida con un cote mínimo en la acción obre el actuador (problema multiobjetivo. Do tipo báico de control: Control en lazo abierto Control en lazo cerrado 74
276 En lazo abierto no e tiene en cuenta lo reultado de la medida de la planta para la acción obre el actuador. Ejemplo: Encender la calefacción de 8 hora a hora. El control e realimentado (lazo cerrado cuando e ua la medida de la planta en la acción obre el actuador. Ejemplo: Encender la calefacción i la temperatura del local e inferior a grado. Ventaja de la realimentación: La medida de la planta e controlada en el valor deeado. Inconveniente de la realimentación: Se precia un enor para medir la eñal, cableado y un controlador para accionar el actuador de forma automática. El actuador no trabaja a régimen contante lo que diminuye u vida útil y/o aumenta u conumo. 75
277 Control manual y control en lazo abierto Objetivo de control: Etacionario: La eñal de alida debe eguir a una referencia. Tranitorio: Rapidez con la menor ocilación poible. Control manual: Incrementar u(t para incrementar y(t. Sólo e puede llevar al itema a una poición final Dinámica lenta. Operario como controlador. y ( t cuando t 76
278 Control en lazo abierto: Conocido P(, introducir un K( con dinámica que cancelen la de la planta (etacionario y tranitorio. Senibilidad e la relación entre una perturbación y una alida del itema. Sitema muy enible a: Cambio en planta. Ejemplo: Cambio en Punto de Equilibrio. Perturbacione en la carga L(. Baja frecuencia. Ejemplo: Actuador con no linealidad etática. Perturbacione en la alida D(. Alta frecuencia. Ejemplo: Dinámica no lineale de la planta. 77
279 78 Control de lazo cerrado: Poco enible a cambio en planta y perturbacione. Se puede definir diferente funcione de tranferencia entrada/alida entrada/error enibilidad ( ( ( ( ( ( ( K P K P R Y T yr ( ( ( ( ( K P R E T er ( ( ( ( ( K P D Y T yd
280 Diagrama general del control en lazo cerrado Se tiene un controlador de do grado de libertad: e u K( ~ y Que, en la práctica, emplea una tecnología: enore y actuadore. 79
281 Senore: General. Funcionamiento etático o dinámico. Caracterítica: Campo de operación, preciión, zona muerta, hitérei. Senore de variable mecánica: Senore de poición y deplazamiento lineal: Potenciómetro, incro, encoder. Senore de proximidad: Fotoeléctrico. Senore de velocidad: Tacómetro y óptico. Senore de aceleración: Acelerómetro. Senore de variable de proceo: Senore de temperatura: Bimetálico, de reitencia, termopare. Senore de preión: Galga exteniométrica, tubo Bourdon, fuelle y diafragma. Senore de nivel: Flotadore, de preión etática y diferencial, y de capacidad. 8
282 Actuadore: Interruptore mecánico. Relé (interruptore eléctrico. Válvula y actuadore hidráulico y neumático. Elemento eléctrico de calentamiento. Variadore. Motore: o Motore de inducción y íncrono. o Motor de corriente continua. o Motore pao a pao. 8
283 En cuanto a u comportamiento (Función de tranferencia Senor ideal: Etática (cambio de ecala, y Kx. Actuador: Etática o de primer orden con dinámica má rápida que la planta. En la práctica pueden aparecer no linealidade del enor o actuador: Zona muerta: La reacción en un entido no tiene el mimo camino que la opueta. Saturación: El enor o actuador tiene uno límite de funcionamiento. Objetivo de control: Dieñar un controlador que no ature el actuador de la planta. En cao contrario, el controlador obtenido erá imilar a un controlador de do poicione (Todo- Nada. 8
284 Según e ha indicado, el control má encillo e el Control de do poicione También conocido como controlador todo-nada. E relativamente imple y barato y por eo e uele utilizar ampliamente en itema indutriale y domético. r - e m La alida del controlador preenta olamente do valore, dependiendo del igno del error. La mayoría de eto controladore preentan un fenómeno de hitérei. r e m - 83
285 El Control flotante e una variación del control todo-nada en el cual la alida del controlador e etacionaria mientra el error etá dentro de la franja de hitérei. Cuando el error queda fuera de eta franja la alida del controlador paa a tomar el valor correpondiente al igno del error. Señal de control - Error - 84
286 .- Control proporcional. El controlador proporcional produce una variable de alida m proporcional al error del itema e. m K p e El valor caracterítico del controlador proporcional e la ganancia proporcional K p, que e la cantidad multiplicada por la cual la variable de control m cambia cuando el error cambia Δe. m K p Δe e Δe Un controlador proporcional reponde rápidamente ante el error de referencia, pero no e capaz de eliminar completamente la perturbacione ni dicho error. Ademá puede producir inetabilidad. 85
287 Ejemplo: Error Acción de control Entrada (Nivel deeado - e Control v Sitema (planta Salida (Nivel real Válvula Nivel v v h h a b luego e h v h a e v b K p e v 86
288 Mucho fabricante de controladore no utilizan el término ganancia para deignar la enibilidad del controlador, ino que utilizan el término Banda Proporcional, PB. La relación entre una y otra e exprea mediante: PB Kp (Se ecribe de eta forma porque normalmente PB e exprea en porcentaje. Una banda proporcional ancha e lo mimo que una ganancia baja, y una banda proporcional etrecha equivale a una ganancia alta. La banda proporcional también e define como el error que e requiere para llevar la alida del controlador del valor má bajo hata el má alto. 87
289 3.- Control integral. En un control de acción integral, el valor de alida del controlador m e proporcional a la integral de la eñal de error. E decir: t dm( t Ki Kie( t o m( t Ki e( t dt M ( E( dt Por ejemplo: El controlador integral e utiliza obre todo cuando aparecen m problema de error en régimen etacionario. t e t 88
290 4.- Control proporcional-integral. En ete tipo de control la alida del controlador e una uma aritmética de una acción proporcional má una acción integral. El controlador proporcional tiene mejor caracterítica dinámica, ya que actúa ante cualquier deviación en el error de forma cai inmediata, in embargo e incapaz de eliminar lo errore en régimen etacionario El controlador integral diminuye el error en régimen etacionario pero reponde má lentamente que el controlador proporcional. t t K p m( t K pe( t K i e( t dt o m( t K pe( t e( t dt T Ki M ( Kp E( El valor de T i equivale al tiempo requerido en el modo integral para alcanzar el cambio en la alida producido por el modo proporcional. i 89
291 Un problema del modo integral e que incrementa la tendencia a la ocilación de la variable controlada. Por ete motivo e conveniente reducir el valor de la ganancia proporcional. Eto hace que el controlador ea má lento y que el controlador integral iga actuando a vece aunque la eñal de error ea nula, debido a la acción de eñale antigua. 9
292 5.- Control proporcional-derivativo. Etá formado por una acción proporcional má una acción derivativa. La acción derivativa tiene efecto cuando e producen cambio en el error. de( t m( t K pe( t K pt M ( K ( T E( d p d dt m t e t 9
293 El tiempo derivativo T d e el intervalo de tiempo en el que la acción de velocidad de variación del error e adelanta al efecto de acción proporcional. De alguna forma intenta anticipare al lo cambio en el error, mediante la lectura de lo errore antiguo. Incrementa la etabilidad al itema. La acción derivativa tiene la deventaja de que amplifica la eñale de ruido de alta frecuencia y puede producir aturación en el actuador. El control proporcional-derivativo e ua en proceo con cambio de carga repentino y en lo que el control proporcional no e capaz de mantener el error dentro de uno nivele aceptable. Aunque no afecta directamente al error etacionario, añade amortiguamiento al itema y permite uar valore de ganancia má elevado, lo cual produce una mejoría en aquél. Debido a que el control derivativo actúa obre la variación del error y no obre el error en í, nunca e utiliza olo. Siempre e hace en combinación con la acción proporcional, o la proporcional integral. 9
294 6.- Control proporcional-integral-derivativo. En ete controlador e combinan la tre accione para intentar aprovechar la ventaja que ofrecen cada una de ella. 93 t i p d p p dt t e T K dt t de T K t e K m t ( ( ( ( ( ( ( E T T K M i d p
295 La acción proporcional aumenta la dinámica del controlador, la acción diferencial e anticipa a la acción integral en función de la variación del error, la acción integral aumenta egún e acumula el error en el tiempo. Generalmente la acción integral e utiliza para eliminar el error etacionario, mientra que la acción derivativa tiende a etabilizar el itema y uaviza el error producido por cambio bruco de la eñal de entrada. 94
296 7.- Controladore electrónico analógico Para el itema compueto por amplificadore operacionale de la figura Su función de tranferencia e: Eo( Ei( Z Z ( ( 95
297 Por ejemplo para el itema: La función de tranferencia e: E E ( ( R R R C Según eto e pueden dieñar diferente tipo de rede de compenación. 96

298 E ( Acción de G( Ei ( Circuito con amplificadore control operacionale 97
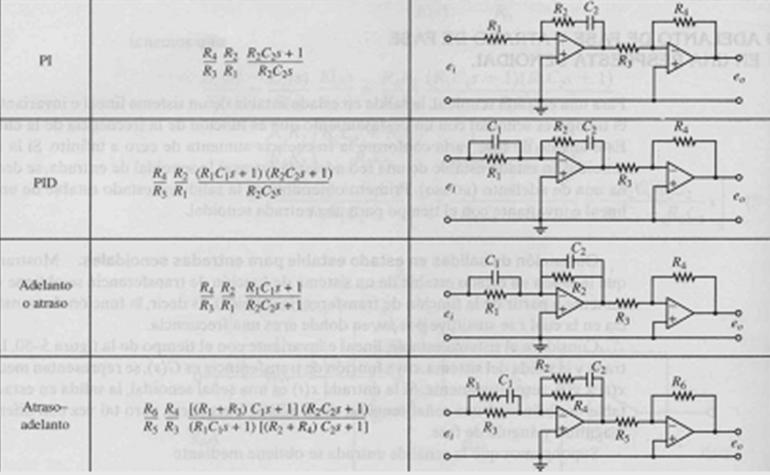
299 98
300 8.-Método práctico de ajute de controladore PID. La eñal de entrada má utilizada para identificar el comportamiento de un itema a controlar e el ecalón unitario. E decir una variación en una unidad de la entrada de un valor fijo contante a otro. Lo parámetro que caracterizan la repueta on: x m : el obrepao máximo. T : tiempo de etablecimiento. T r : tiempo de crecimiento. T t : retardo. Generalmente e deea uno valore de x m, T r, y T pequeño. 99
301 8..-Regla de Ziegler y Nichol. Se toma como función del controlador: G c ( K p Td Ti Repueta a un ecalón Se obtiene experimentalmente la repueta del itema a un ecalón unitario. Si la repueta de la planta e como la de la figura iguiente, e podrá aplicar ete método: 3
302 La curva en t e puede caracterizar por un tiempo de retrao t o, y una contante de tiempo T. t o y τ e determinan trazando la tangente a la curva en forma de S en el punto de inflexión y e determina u interección con el eje de tiempo y con la línea c(tδc, egún e indica en la figura. 3
303 El modelo del itema ería: Donde: K Δc Δm y C R( T t ( o τ Ke T La regla de intonización de Ziegler y Nichol on: Tipo de controlador K p Ti Td P PI PID T t.9t t.t t 3.33t Eto valore on orientativo, dado que generalmente el modelo de la planta e va a obtener empíricamente con un cierto error. Por lo tanto el modelo erá uceptible de mejorar por tanteo. t t 3
304 8..-Método de la ganancia última..- Se deconectan la accione integral y derivativa, de manera que quede olo la acción proporcional. Equivale a hacer T i y T d en la función del compenador: G c ( K p Td Ti.- Con el controlador en automático, e incrementa la ganancia proporcional (o e reduce la banda proporcional, hata un valor crítico K cr en el que el circuito ocila con amplitud contante. 3.- Se mide el período de ocilación, P cr. La regla ahora on: Tipo de controlador K p Ti Td P PI PID.5K cr.45k cr.83p cr.6k cr.5pcr.5pcr 33
305 8.3.-Regla de ajute de Chien, Hrone and Rewick. Tipo de controlador Parámetro Control Aperiódico Control con % de obrepao Perturbacione Cambio de referencia Perturbacione Cambio de referencia P.3 T g.3 T g.7 T g.7 T g K p t t t t PI K p.6 T g.35 T g.7 T g.6 T g t t t t T i 4t.T g.3t T g PID K p.95 T g.6 T g. T g.95 T g t t t t T i.4t T g t.35t g T d.4t.5t t.4.47t Donde t e el retardo y T g e el tiempo de crecimiento. 34
306 8.4.-Concluione Objetivo del controlador: Coneguir que la alida del itema ea igual a la referencia.. En el menor tiempo poible. De forma uave, in ocilacione Acción proporcional: Reduce el tiempo de repueta pero no limita el error etacionario. Acción Integral: Elimina el error etacionario pero aumenta la ocilación. Acción derivativa: Reduce la ocilación y mejora la repueta tranitoria. La iguiente tabla e un reumen orientativo de cómo ajutar un PID: T. Repueta Sobrepao T. Etablecim. Error etac. K p T i T d 35
307 9 Rede de compenación. Lo compenadore de mayor uo on lo que uan la accione proporcional, integral y derivativa. Sin embargo eto controladore on un cao particular de otro controladore má generale que e denominan controladore de adelanto, atrao y adelanto-atrao. 36
308 9..-Controlador de adelanto E un controlador que tiene una función de tranferencia del tipo: G c T ( K α T c K c, ( < α < α T Tα αt T La compenación de adelanto báicamente acelera la repueta e incrementa la etabilidad del itema. Proporciona una frecuencia de cruce de ganancia má alta que en el itema original, por tanto, aumenta el ancho de banda del itema en lazo cerrado. 37
309 Un ancho de banda alto ignifica menor tiempo de etablecimiento (repueta má rápida y etable. Amplifica el ruido de alta frecuencia (filtro paa alto. Requiere una ganancia mayor que la que neceita un controlador de atrao, lo que cai iempre ignifica mayor tamaño y mayor peo (y mayor cote. Un controlador PD ideal e un controlador de adelanto, en el que el polo del controlador e lleva al infinito. 38
310 9..-Controlador de atrao E un controlador que tiene una función de tranferencia del tipo: G c T ( K β T c K c, ( β > β T Tβ Báicamente mejora la preciión en etado etable, pero reduce la velocidad de repueta ya que reduce el ancho de banda del itema en lazo cerrado. En general tiende a hacer el itema meno etable. Un controlador PI e un controlador de atrao, en el que el polo e itúa en el origen. T βt 39
311 Intenta combinar la caracterítica (beneficioa de lo controladore de adelanto y atrao. Un controlador PID e un controlador de atrao-adelanto, en el que uno de lo polo e encuentra en el origen y el otro en el infinito Controlador de adelanto-atrao Combina la ventaja de la compenacione de atrao y adelanto. Al tener do polo y do cero, aumenta el orden del itema en. ( ( (,, ( > > γ β β γ β γ γ β T T T T K T T T T K G c c c Incrementa la ganancia a baja frecuencia (lo que ignifica que mejora la preciión en el etacionario, ademá incrementa el ancho de banda (itema má rápido y mejora la etabilidad del itema.
312 Tema 9 Dieño de controladore analógico.. Introducción. Dieño de controladore mediante la técnica de Lugar de la Raíce... Controlador PD (ideal... Controlador de adelanto (PD real..3. Controlador PI..4. Controlador de atrao..5. Controlador PID (ideal..6. Controlador de adelanto-atrao. 3. Dieño de controladore mediante la técnica de Repueta en Frecuencia. 3.. Controlador de adelanto. 3.. Controlador de atrao. 3
313 .- Introducción. Lo controladore e pueden adaptar a diferente itema modificando u parámetro y aí coneguir alcanzar lo objetivo de dieño. No exite un controlador óptimo univeral debido a que la condicione de funcionamiento y la perturbacione on muy diferente Exiten do forma de ajutar lo parámetro de control: - Mediante criterio práctico. - Mediante criterio matemático. Lo método matemático requieren un conocimiento profundo de la técnica de análii y dieño matemático. 3
314 . Dieño de controladore mediante la técnica de Lugar de la Raíce. A partir de la epecificacione deeada para un itema in compenar (que no cumple la epecificacione e obtiene una ituación para lo polo en lazo cerrado del itema compenado (que i la cumple. El dieño del controlador hace que lo polo del e itúen en dicha ubicación. itema original controlador 33
315 . Controlador PD Supongamo que e parte de un itema con FTLA Para ete itema e deea que: ζ.5 y ω n 4 rad/ 4 GH( ( El itema original para ganancia k4, preenta ζ.5 y ω n rad/ Dibujando u lugar de la raíce, junto con lo lugare geométrico de ζ.5 y ω n 4 rad/, e obtiene: 34
316 Como e ve en la figura el punto (o punto deeado para lo polo en lazo cerrado no e itúan obre el lugar de la raíce. Por lo tanto e impoible alcanzar la epecificacione del problema variando ólo una ganancia (controlador proporcional. Se neceita introducir una red de compenación (controlador que modifique el lugar de la raíce para que ee punto deeado eté dentro del LDR. Como no e epecifica nada acerca del error etacionario, no hay que penar en un integrador. Se plantea entonce uar un controlador PD. Se va a añadir un cero al itema inicial. 35
317 Hay do opcione 8 6 Imag Axi Imag Axi Real Axi Real Axi (a z c > (b z c < De la do opcione, la que interea e la (a, ya que la (b no va a cumplir en ningún cao la condición de ω n 4 y θ6º. Falta aber dónde aplicar el cero para que el círculo pae exactamente por el punto deeado. 36
318 Probando, por tanteo, e obtiene que i el cero e itúa en -8: 5 5 Imag Axi Real Axi Al tranformar el itema e logra que el LR pae por lo polo deeado. Falta conocer qué ganancia debe aportar el controlador aplicado para qué eo polo ean lo del itema compenado. 37
319 Utilizando rlocfind en el ejemplo y pinchando en el punto deeado e obtiene un valor de k.49. Por lo tanto el itema en lazo cerrado con el controlador queda: ( 8.49* 4 ( - Interea in embargo conocer cómo e puede realizar el dieño del controlador anterior de una forma matemática. 38
320 Se dibuja de nuevo el lugar de la raíce inicial, junto con el punto deeado: 5 Imag Axi 6º Real Axi El punto deeado tiene como coordenada (-,3.46 Ete valor e puede obtener ya que θ6º y ω n 4, por tanto: x-4*co(6 e y4*en(6. 39
321 Si en ee punto e aplicara el criterio del ángulo (del LDR: -º-9º-8º Se tiene que, evidentemente, la igualdad anterior e fala, pue ee punto no pertenece al LDR ( º-9º-º Sobran 3º poitivo (ángulo ϕ a compenar. Ete ángulo e el que deba aportar el compenador (al añadir el cero en -8. Lo que queda ahora e: Imag Axi - 3º 6º Real Axi 3
322 Ahora con el cero en ea poición, el criterio del ángulo e: 3º-9º-º-8º Se cumple la condición del ángulo. Para que realmente ituare en ee punto hay que calcular la ganancia correpondiente, de la condición de módulo del LR. cuya olución e k.49. k 4 ( 8 ( 3.46 j 3
323 .. Controlador de adelanto Se ha vito que un controlador PD e un cao particular de controlador de adelanto en el que el polo etá en el infinito. Cuando uamo un controlador de adelanto tenemo que ituar un polo y un cero. Eo no da libertad para ituarlo en cai toda la poicione poible (con cierta limitacione. En ete cao el cero debe etar también a la derecha de lo polo de la planta: Imag Axi 5 Gc( K Con z c < p c c z p c c Real Axi 3
324 Se pretende lo mimo que ante: añadir 3º (ϕ para que el punto deeado pertenezca al nuevo LDR. La ituación e la iguiente: 4 3 α θ El cero aporta un ángulo θ y el polo un ángulo -α. Se debe cumplir que θ-α3º (ϕ. 33
325 Lo anterior da libertad para colocar el polo y el cero en diferente poicione. En general e uelen uar criterio: El método de la biectriz Situar el cero encima de un polo de la planta original. 34
326 Método de la biectriz Conite en unir con una recta el punto deeado con el origen de coordenada, trazar una recta horizontal que pae por el punto deeado, y trazar la biectriz del ángulo que forman amba recta. A partir de ea biectriz e toman ϕ/ hacia cada lado y e trazan recta que interectan con el eje real en el cero y el polo. Gráficamente: Horizontal P Biectriz ϕ ϕ 6º Ete método permite obtener un valor de ganancia del controlador máximo y el itema tendrá mejore pretacione. 35
327 En el ejemplo anteriormente etudiado, iguiendo ete procedimiento e obtiene: Cero en -.9 y polo en -5.4 Finalmente e puede calcular la ganancia: 4(.9 k ( ( 5.4 Se obtiene un valor de k j El controlador que queda e: G c
328 Situando el cero obre un polo del itema original Se hace lo iguiente: Se itúa el cero obre el egundo polo contando dede el origen, hacia la izquierda (incluyendo el polo que eté en el origen El cero ahora aporta un ángulo θ9º. Lo ángulo de lo polo originale eran 9º-º Para calcular el ángulo que ha de aportar el polo hacemo: 9-9--α-8 de donde α6º. Por tanto el polo deberá ituare en -4, (como e ha adelantado en el dibujo. La ganancia ahora e k4, con lo que el controlador e: G c
329 La repueta del itema en lazo cerrado ante un ecalón unitario en lo tre cao e:.5 Controlador PD ideal From: U( Amplitude To: Y( Time (ec. Controlador mét. Biectriz From: U( Amplitude To: Y( Time (ec. Controlador cancelando polo From: U( Amplitude To: Y( Time (ec. 38
330 .3 Controlador PI En general: Se utiliza para mejorar el error etacionario. Aumenta el tipo del itema y lo hace meno etable. La velocidad de repueta e atenúa. 39
331 Ejemplo: Dado el itema G(, H ( ( ( calcular un controlador que haga K p 9, M p 5% y t (5% (K p en ete cao e la contante de error etático de poición Como e pide mejorar el tranitorio (Mp,t y el etacionario (Kp, en principio e buca mejorar en primer lugar el tranitorio con un controlador PD o de adelanto. Dado que M p 5% y t (5%, obtenemo: ζ.69 y ω n.7, lo polo de lazo cerrado etarán en: -.5±.573j. Dado que el lugar de la raíce de GH e: 33
332 Se comprueba que el itema original puede cumplir con la condicione del tranitorio in má que aportar una ganancia adecuada. La cual e calcula a partir de: K c (el valor obtenido de e K c.7 e. ( ( j Lo iguiente e comprobar la condición del etacionario..7 K p limg( lim ( ( Como no e cumple la condición del etacionario, e piena en uar un PI. La función de tranferencia de un PI e puede poner como: K i K R ( α Gc K R K R Ti Se uará la última expreión para dieñar el PI. Con ello e conigue que K p y e. 33
333 Lo que e hace iempre e elegir un α próximo a, para que el lugar de la raíce no varíe coniderablemente. El valor e toma arbitrariamente como α.5 (6 vece menor que la ditancia a lo polo deeado. Al tomar el polo y el cero tan próximo el ángulo que aportan erá depreciable, quedando el lugar de la raíce cai igual en la inmediacione de lo polo deeado. Eto e lo que en teoría e debe hacer, pero depué iempre hay que comprobarlo. El controlador queda:. 5 G c.7 donde e ha tomado como K R el valor de K c calculado previamente. 33
334 La función de tranferencia en lazo cerrado queda: F.5 ( ( la repueta ecalón del itema e: Step Repone From: U( Amplitude To: Y( Time (ec. La repueta no e parece en nada a lo que e deeaba, debido a que el polo real e dominante, y hace al itema lento. Lo cual no demuetra que lo dieño realizado, nunca on definitivo, y hay que realizar depué una labor de ajute para arreglarlo. 333
335 En ete cao, para evitar que el polo real ea dominante, lo que e hace e deplazar el cero del controlador hacia la izquierda. Tomando ahora el controlador: Gc.7.6 Calculando la nueva función de tranferencia de lazo cerrado e obtiene: F.6.7 (.4588( donde ahora el polo real no e tan dominante, y la repueta a un ecalón e de la forma: 334
336 Amplitude Step Repone Gc F.7 (.4588( El itema e aún lento Time (ec. 335
337 Deplazando de nuevo el cero Step Repone Gc Amplitude Time (ec. Que e má parecido a lo que e deeaba. El Tiempo de etablecimiento queda:.8 egundo. 336
338 Lo polo del itema on ahora: -.55 ±.3334j Mientra que lo polo deeado on: -.5 ±.573j Aunque lo polo complejo conjugado obtenido no on exactamente lo deeado, etán próximo y el polo real no e dominante. Se oberva que cuanto má e aleja el cero del origen, lo polo de lazo cerrado e eparan má de lo deeado, pero en ete cao el reultado e aceptable. 337
339 .4 Controlador de atrao. La idea principal e la mima que en un PI. Se upone que la caracterítica del tranitorio on aceptable, y lo que e pretende e mejorar el etacionario (el error. Para ello e añaden un polo y un cero muy próximo entre í para que e modifique poco el LDR en la inmediacione de lo polo deeado (dominante. Gc K z c ( c Con p c < z c ( próximo pc 338
340 Tomando el mimo cao que en el apartado anterior. Dado el itema G(, H ( ( ( calcular un controlador que haga K p 9, M p 5% y t (5% Igual que en el cao anterior. Se pide mejorar el tranitorio y el etacionario. Una poibilidad e en principio arreglar el tranitorio con un controlador PD o de adelanto. Pero ete cao e abe que e uficiente aportar una ganancia de valor K c.7. Tomando ea Kc, Kp (el error limg( lim.7 p de poición e: ( ( K Como ahora no e incluye un polo en el origen, el tipo del itema no aumenta, por lo tanto K p no e va a hacer infinito al incluir el compenador. 339
341 La idea e aumentar K p, in aumentar la ganancia del itema directamente, ya que lo polo deeado e deplazarían. Cuánto debe aumentar K p : 9/ como mínimo. Se toma un valor de, para redondear. Si e toma un controlador: G c.7.. La función de tranferencia de lazo F..7 cerrado con dicho controlador e: (.64 (
342 Su repueta ante el ecalón e: G c Step Repone From: U( F..7 (.64( Amplitude To: Y( Time (ec. No preenta exactamente la repueta deeada. 34
343 Se redefine, deplazando hacia la izquierda el polo y el cero. (manteniendo u aportación de a K p G c Step Repone From: U( (.8/ Amplitude To: Y( Time (ec. Se obtiene un t (5%.8 y Mp.3% (má parecido a lo que e pide. 34
344 .5. Controlador PID. Se uará un ejemplo de dieño. Dado el itema G(, H ( ( ( calcular un controlador que haga que: e 5%, M p 5% y t (Se ve que la condición t e má retrictiva que en lo ejemplo anteriore. En ete cao la epecificacione del tranitorio no on acceible por el itema original ya que lo polo deeado etarían en 3.4±3.4j Imag Axi Real Axi 343
345 Ademá el itema original preenta un error etacionario ante un ecalón e.66. Como hay que modificar también el error etacionario, e empleará un PID, con lo que e conigue que e El controlador a aplicar ahora e: ( a( b Se calculará primero la parte del PD. G c K R 344
346 Para obtener lo polo deeado el controlador debe aportar un ángulo α. 4 3 α α-(8-arctg(3.4/.4-(8-arctg(3.4/.4-8 Se obtiene: α54.7º. E decir la poición del cero deberá er: x z -(3.4/tg(
347 Para que el LDR pae por lo punto 3.4±3.4j, el valor de K deberá cumplir: R ( 5.4 ( ( j K Que, aproximadamente, da K R 3.8 El itema con ete PD tiene entonce como e : e lim G( % Por lo tanto hay que diminuir el error. Se neceita añadir una red de atrao (PI en ete cao. Eligiendo ahora un cero en.8 y un polo en e tiene: ( 5.4(. 8 G c 3.8 F 3.8 ( 5.4(.8 ( (
348 La repueta ante el ecalón: ( 5.4(. 8 G c 3.8 F 3.8 ( 5.4(.8 (.7866( Amplitude To: Y( Step Repone From: U( Time (ec. 347
349 .6. Controlador de adelanto-atrao. Cuando e dieña un controlador de adelanto-atrao, el objetivo e el mimo que en el cao de un PID. Se utiliza cuando e neceita cambiar la caracterítica del tranitorio y el etacionario imultáneamente. Primero e dieña la parte de adelanto para ubicar lo polo deeado y luego la de atrao para cumplir con la condicione de error etacionario. La forma del controlador e ahora: G c K c a b c d 348
350 El itema e el mimo del cao anterior Dado el itema G (, H ( ( ( calcular un controlador que haga que: e 5%, M p 5% y t Como ya e ha vito lo polo deeado etarían en 3.4±3.4j. Se dieña primero el controlador de adelanto. Para ello e uará el método de ituar el cero del controlador obre el º polo a la izquierda del itema, contando dede el origen. Imag Axi Real Axi 349
351 Ahora el ángulo que aporta el cero e igual al que aporta el egundo polo, por lo que e anulan y e tiene que: ϑ-(8-arctg(3.4/.4-8 Dada la geometría del dibujo, el polo del controlador e ituará en x-5.8. El valor de K c e obtiene de: ( ( 5.8( ( Kc K c j Con el controlador de adelanto el error etacionario e: e lim G( E decir un error del 6.7%. Para lograr que ea del 5%:.5 G ( K p Para ello Kp. (en el limite 9 o, lo que e lo mimo: lim G ( 35
352 Como ( G( 4.46 ( 5.8( ( limg( c Se hace que c y d cumplan la relación d.74 De forma que c y d etén próximo entre í y próximo al origen, para que modifiquen lo meno poible la poición de lo polo deeado., 35
353 Tomando por ejemplo: La repueta ecalón e:.767. Se tiene que e.454 Step Repone From: U( Amplitude To: Y( Que preenta un t.. Time (ec. 35
354 Tomando.85.8 La repueta e: Step Repone From: U( Amplitude To: Y( Con un tiempo de etablecimiento de t.87. Se puede dar el dieño por bueno. Time (ec. 353
355 Concluione: Según lo objetivo que e pidan Modificar la repueta tranitoria (M p, t r, t, ζ, ω n : Controlador PD o de adelanto. Se itúan lo polo dominante deeado (en función de lo parámetro anteriore y e calcula la poición del cero y el polo del controlador. Mejorar el etacionario (error, K p, K v, etc Controlador PI o de atrao. Situando el polo y el cero del controlador próximo entre í y próximo al origen (con cierta reerva como ya e ha vito, para evitar tener un polo real dominante que haga al itema má lento. 3 Mejorar amba caracterítica, Controlador PID o un adelanto-atrao. Empezar a dieñar iempre por el PD o adelanto de forma que e cumplan la caracterítica del tranitorio. Comprobar depué i la epecificacione del etacionario e cumplen y de no er aí, bucar un controlador de atrao o un PI que mejore la caracterítica del etacionario. En cualquiera de lo cao, una vez dieñado el controlador, e debe verificar mediante imulación que e alcanzan lo objetivo de dieño marcado. De no er aí, habrá que modificar el controlador por prueba y error. 354
356 Ejemplo: Dado el itema con función de tranferencia G ( 3 ( Calcular un controlador, de forma que e obtenga K v >, M p <5% y t (% ante un ecalón unitario. Con eta condicione, ξ.69 y ω n 5.79, lo polo deeado erán -4±4.j. X -4 4.j β α α X -3 X - X β8º - arctg(4./3,4º α 8º - arctg (4./5,46º α 8º - arctg (4./433.6º β-α -α º El ángulo falta para -8º e θ-34.34º, que e el que debe aportar el controlador. 355
357 Se neceita uar un controlador de atrao. (El dieño e como el de uno de adelanto. Se itúa el polo en -3, cancelando el cero de la planta, aporta 3.4º. El cero del controlador debe entonce etar en La ganancia e puede calcular con rlocfind. Se obtiene K c 3. El controlador obtenido e G c Se comprueba que e cumple el requiito para la K v : ( Kv lim 3 ( > Con lo que la olución definitiva e: G c
358 Si comprobamo en el problema anterior el tranitorio, podemo obervar que no e cumplen la epecificacione pedida: Eto e debido a la preencia de un cero de lazo abierto en -3 que también aparece en lazo cerrado y que aumenta el valor del obreimpulo. Para arreglar eto habría que repetir el dieño, tomando un valor de ξ mayor que
359 3. Dieño de controladore mediante la técnica de Repueta en Frecuencia 3.. Compenador en adelanto. La expreión de un compenador en adelanto e: G c T ( K α T c Kc, ( < α < α T Tα Ganancia Kc, cero en T, polo en αt αt T El dieño del mimo paa entonce por obtener Kc, T y α. 358

360 Su diagrama polar e: El ángulo φ m e el adelanto de fae que e aporta φ m e relaciona con α egún la ecuación α enφ m α El valor de α mínimo que en la práctica e puede obtener uando controladore analógico e α.7, lo que da un φ m máximo 6º (aproximadamente. Luego el ángulo de fae máximo que puede aportar un compenador de adelanto no uele uperar lo 6º. 359

361 El diagrama de Bode e: Donde ω m T α 36
362 Regla de dieño: La epecificacione de dieño etarán dada en Margen de Fae, Margen de Ganancia y Coeficiente de Error etático.. T T Se toma G K α c c K α T α T y e calcula K, de forma que e cumpla la condición de coeficiente de error etático.. Se toma G G*K. Se dibuja u diagrama de Bode y e evalúan u márgene de fae y de ganancia. 3. Se determina cuál erá el ángulo φ que debe aportar el controlador (Por eguridad e añaden entre 5º y º. 36
363 4. α A partir de la ecuación enφ m Se obtiene el valor de α. α Se calcula la frecuencia a la cual la magnitud del itema G e log Se elige eta frecuencia como nueva frecuencia de cruce de ganancia. En eta frecuencia e ha de cumplir entonce que ωm T α De eta última expreión e obtiene T. α 5. A partir de α y T e obtiene. K c K α 6. Se comprueba i e han obtenido lo márgene de fae y de ganancia de la epecificacione. 36
364 Ejemplo: Dado el itema ( H( G Se deea: - margen de fae de al meno 55º - error etacionario ante una rampa menor de.. Se calcula K, de forma que e cumpla la condición de coeficiente de error etático. ( ( G T T K G α K K G R E ( ( ( Luego 5 K. ( lim K E e 363
365 y 3 Se dibuja el diagrama de Bode de G G*K. y Se determina cuál erá el ángulo φ que debe aportar el controlador. Preenta un margen de fae de aproximadamente 8º. 6 Bode Diagram G Gm Inf, Pm7.964 deg. (at 3.84 rad/ec Como e quiere MF55º, la fae que debe aportar el controlador e de 37º. Phae (deg; Magnitude (db Frequency (rad/ec 364
366 4. A partir de φ e obtiene el valor de α : φ37º. Se uele tomar iempre un margen de eguridad de uno 8º a º. Tomando φ 37º 9º 46º, Se obtiene α.6. Se calcula la frecuencia a la cual la magnitud del itema G e log 7.8 α db log Se toma ω m 5 rad/. Se elige eta frecuencia como nueva frecuencia de cruce de ganancia. En eta frecuencia e ha de cumplir entonce que ωm De eta última expreión e obtiene T. T α Se obtiene T.5. α 5. A partir de α y T e obtiene. K c α K 5.6 De donde K c
367 El controlador queda entonce: G c *.6 6 El diagrama de Bode de G*G c e Bode Diagram Gm Inf, Pm57.63 deg. (at rad/ec 5 Phae (deg; Magnitude (db Se ha obtenido un MF 57.6º Frequency (rad/ec 366
368 3.. Compenador en atrao. La expreión de un compenador en atrao e G c T ( K β T c K c, ( β > β T Tβ Ganancia Kc, cero en T, polo en βt T βt El dieño del mimo paa entonce por obtener Kc, T y β. 367


369 Su diagrama polar e: y u diagrama de Bode 368
DEPARTAMENTO DE ELECTRÓNICA Y AUTOMÁTICA CARRERAS: BIOINGENIERÍA E INGENIERÍA ELECTRÓNICA GUÍA DE APRENDIZAJE Y AUTOEVALUACIÓN Nº 1
 DEPARTAMENTO DE ELECTRÓNICA Y AUTOMÁTICA CARRERAS: BIOINGENIERÍA E INGENIERÍA ELECTRÓNICA ÁREA: CONTROL ASIGNATURA: CONTROL II GUÍA DE APRENDIZAJE Y AUTOEVALUACIÓN Nº Análii de Etabilidad de lo Sitema
DEPARTAMENTO DE ELECTRÓNICA Y AUTOMÁTICA CARRERAS: BIOINGENIERÍA E INGENIERÍA ELECTRÓNICA ÁREA: CONTROL ASIGNATURA: CONTROL II GUÍA DE APRENDIZAJE Y AUTOEVALUACIÓN Nº Análii de Etabilidad de lo Sitema
Lugar Geométrico de las Raíces
 Lugar Geométrico de la Raíce N de práctica: 9 Tema Correpondiente: Lugar geométrico de la raíce Nombre completo del alumno Firma N de brigada: Fecha de elaboración: Grupo: Elaborado por: Reviado por: Autorizado
Lugar Geométrico de la Raíce N de práctica: 9 Tema Correpondiente: Lugar geométrico de la raíce Nombre completo del alumno Firma N de brigada: Fecha de elaboración: Grupo: Elaborado por: Reviado por: Autorizado
EJERCICIOS DE TEORÍA DE CONTROL AUTOMÁTICO SISTEMAS CONTINUOS (II)
") C8. Para el itema de la cuetión C6, Qué diría i alguien ugiriera trabajar con el itema en torno al punto de operación (U,Y b )? C9. Se deea controlar la poición del eje de un motor. Para identificar el
C8. Para el itema de la cuetión C6, Qué diría i alguien ugiriera trabajar con el itema en torno al punto de operación (U,Y b )? C9. Se deea controlar la poición del eje de un motor. Para identificar el
ANÁLISIS DEL LUGAR GEOMÉTRICO DE LAS RAÍCES
 CAPITULO 3 ANÁLISIS DEL LUGAR GEOMÉTRICO DE LAS RAÍCES 3. INTRODUCCIÓN La etabilidad relativa y la repueta tranitoria de un itema de control en lazo cerrado etán directamente relacionada con la localización
CAPITULO 3 ANÁLISIS DEL LUGAR GEOMÉTRICO DE LAS RAÍCES 3. INTRODUCCIÓN La etabilidad relativa y la repueta tranitoria de un itema de control en lazo cerrado etán directamente relacionada con la localización
1. Breves Apuntes de la Transformada de Laplace
 Ingeniería de Sitema. Breve Apunte de la Tranformada de Laplace Nota: Eto apunte tomado de diferente bibliografía y apunte de clae, no utituyen la diapoitiva ni la explicación del profeor, ino que complementan
Ingeniería de Sitema. Breve Apunte de la Tranformada de Laplace Nota: Eto apunte tomado de diferente bibliografía y apunte de clae, no utituyen la diapoitiva ni la explicación del profeor, ino que complementan
Automá ca. Ejercicios Capítulo5.Estabilidad. JoséRamónLlataGarcía EstherGonzálezSarabia DámasoFernándezPérez CarlosToreFerero MaríaSandraRoblaGómez
 Automáca Ejercicio Capítulo.Etabilidad JoéRamónLlataGarcía EtherGonáleSarabia DámaoFernándePére CarloToreFerero MaríaSandraRoblaGóme DepartamentodeTecnologíaElectrónica eingenieríadesitemayautomáca Problema
Automáca Ejercicio Capítulo.Etabilidad JoéRamónLlataGarcía EtherGonáleSarabia DámaoFernándePére CarloToreFerero MaríaSandraRoblaGóme DepartamentodeTecnologíaElectrónica eingenieríadesitemayautomáca Problema
y bola riel Mg UNIVERSIDAD NACIONAL DE QUILMES 4 de noviembre de 2002 Página 1 de 5
 INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Control Automático II Má Problema UNIVERSIDAD NACIONAL DE QUILMES 4 de noviembre de 2002 Página de 5. Control de un itema de Bola Riel La Figura muetra
INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Control Automático II Má Problema UNIVERSIDAD NACIONAL DE QUILMES 4 de noviembre de 2002 Página de 5. Control de un itema de Bola Riel La Figura muetra
Errores y Tipo de Sistema
 rrore y Tipo de Sitema rror dinámico: e la diferencia entre la eñale de entrada y alida durante el período tranitorio, e decir el tiempo que tarda la eñal de repueta en etablecere. La repueta de un itema
rrore y Tipo de Sitema rror dinámico: e la diferencia entre la eñale de entrada y alida durante el período tranitorio, e decir el tiempo que tarda la eñal de repueta en etablecere. La repueta de un itema
Introducción. Acciones básicas de control. Sistemas de control versión 2003 Página 1 de 9
 Introducción Sitema de control 67-22 verión 2003 Página 1 de 9 Según vimo en el capítulo I, al controlador ingrean la eñale R() (et-point) y B() (medición de la variable controlada ), e comparan generando
Introducción Sitema de control 67-22 verión 2003 Página 1 de 9 Según vimo en el capítulo I, al controlador ingrean la eñale R() (et-point) y B() (medición de la variable controlada ), e comparan generando
f s1 Para no entrar en ninguna banda prohibida, las nuevas especificaciones que tendremos en cuenta serán y. (+1p)
") . Obtenga la función de tranferencia de un filtro pao de banda que cumpla la iguiente epecificacione: a) Banda paante máximamente plana en f 45, khz con atenuación A p db. b) Banda de rechazo máximamente
. Obtenga la función de tranferencia de un filtro pao de banda que cumpla la iguiente epecificacione: a) Banda paante máximamente plana en f 45, khz con atenuación A p db. b) Banda de rechazo máximamente
SISTEMAS DINÁMICOS IEM2º - Modelos de Sistemas Mecánicos PROBLEMAS
 SISEMAS INÁMICOS IEMº - Modelo de Sitema Mecánico PROBLEMAS P. Para lo itema mecánico de tralación motrado en la figura, e pide: a uncione de tranferencia entre la fuerza f y la velocidade de la maa. b
SISEMAS INÁMICOS IEMº - Modelo de Sitema Mecánico PROBLEMAS P. Para lo itema mecánico de tralación motrado en la figura, e pide: a uncione de tranferencia entre la fuerza f y la velocidade de la maa. b
Función Longitud de Arco
 Función Longitud de Arco Si al extremo final de la curva Lt = t f t dt e deja variable entonce el límite uperior de la a integral depende del parámetro t y e tiene que la longitud de arco de una curva
Función Longitud de Arco Si al extremo final de la curva Lt = t f t dt e deja variable entonce el límite uperior de la a integral depende del parámetro t y e tiene que la longitud de arco de una curva
Examen ordinario de Junio. Curso
 Examen ordinario de Junio. uro 3-4. ' punto La eñal xtco[ω tω t] tiene: a Una componente epectral a la pulación ω ω b omponente epectrale en todo u armónico. c Do componente epectrale en la pulacione ω
Examen ordinario de Junio. uro 3-4. ' punto La eñal xtco[ω tω t] tiene: a Una componente epectral a la pulación ω ω b omponente epectrale en todo u armónico. c Do componente epectrale en la pulacione ω
UNIVERSIDAD DE SEVILLA
 UNIVERSIDAD DE SEVILLA Ecuela Técnica Superior de Ingeniería Informática PRÁCTICA 4: MUESTREO DE SEÑALES Y DIGITALIZACIÓN Tecnología Báica de la Comunicacione (Ingeniería Técnica Informática de Sitema
UNIVERSIDAD DE SEVILLA Ecuela Técnica Superior de Ingeniería Informática PRÁCTICA 4: MUESTREO DE SEÑALES Y DIGITALIZACIÓN Tecnología Báica de la Comunicacione (Ingeniería Técnica Informática de Sitema
SECO 2014-II. Félix Monasterio-Huelin y Álvaro Gutiérrez. 6 de marzo de 2014. Índice 33. Índice de Figuras. Índice de Tablas 34
 SECO 2014-II Félix Monaterio-Huelin y Álvaro Gutiérre 6 de maro de 2014 Índice Índice 33 Índice de Figura 33 Índice de Tabla 34 12.Muetreador ideal y relación entre y 35 13.Muetreo de Sitema en erie 38
SECO 2014-II Félix Monaterio-Huelin y Álvaro Gutiérre 6 de maro de 2014 Índice Índice 33 Índice de Figura 33 Índice de Tabla 34 12.Muetreador ideal y relación entre y 35 13.Muetreo de Sitema en erie 38
REGULACIÓN AUTOMATICA (8)
") REGULACIÓN AUOMAICA 8 Repueta en frecuencia Nyquit Ecuela Politécnica Superior Profeor: Darío García Rodríguez -4.-Dada la función de tranferencia de lazo abierto de un itema con imentación unitaria, para
REGULACIÓN AUOMAICA 8 Repueta en frecuencia Nyquit Ecuela Politécnica Superior Profeor: Darío García Rodríguez -4.-Dada la función de tranferencia de lazo abierto de un itema con imentación unitaria, para
TEST. Cinemática 129. a) 8 b) 1 / 2 c) 10 d) 1 e) 3. a) d) 2.- De las gráficas: b) e) N.A.
 8 b) 1 / 2 c) 10 d) 1 e) 3. a) d) 2.- De las gráficas: b) e) N.A.") Cinemática 9 TEST.- La velocidade v de tre partícula:, y 3 en función del tiempo t, on motrada en la figura. La razón entre la aceleracione mayor y menor e: a) 8 b) / c) 0 d) e) 3.- De la gráfica: a) d)
Cinemática 9 TEST.- La velocidade v de tre partícula:, y 3 en función del tiempo t, on motrada en la figura. La razón entre la aceleracione mayor y menor e: a) 8 b) / c) 0 d) e) 3.- De la gráfica: a) d)
Medidas de Variación o Dispersión. Dra. Noemí L. Ruiz 2007 Derechos de Autor Reservados Revisada 2010
 Medida de Variación o Diperión Dra. Noemí L. Ruiz 007 Derecho de Autor Reervado Reviada 010 Objetivo de la lección Conocer cuále on la medida de variación y cómo e calculan o e determinan Conocer el ignificado
Medida de Variación o Diperión Dra. Noemí L. Ruiz 007 Derecho de Autor Reervado Reviada 010 Objetivo de la lección Conocer cuále on la medida de variación y cómo e calculan o e determinan Conocer el ignificado
s s El radio de curvatura se calcula con la ecuación fundamental de los espejos esféricos.
 Modelo 04. Pregunta 4B.- Un objeto etá ituado a una ditancia de 0 cm del vértice de un epejo cóncavo. Se forma una imagen real, invertida y tre vece mayor que el objeto. a) Calcule el radio de curvatura
Modelo 04. Pregunta 4B.- Un objeto etá ituado a una ditancia de 0 cm del vértice de un epejo cóncavo. Se forma una imagen real, invertida y tre vece mayor que el objeto. a) Calcule el radio de curvatura
Análisis y Solución de. en el dominio del tiempo y en la frecuencia (Laplace).
.") Análii y Solución de Ecuacione Diferenciale lineale en el dominio del tiempo y en la frecuencia Laplace. Doctor Francico Palomera Palacio Departamento de Mecatrónica y Automatización, ITESM, Campu Monterrey
Análii y Solución de Ecuacione Diferenciale lineale en el dominio del tiempo y en la frecuencia Laplace. Doctor Francico Palomera Palacio Departamento de Mecatrónica y Automatización, ITESM, Campu Monterrey
QUÍMICA COMÚN NÚMEROS CUÁNTICOS Y CONFIGURACIÓN ELECTRÓNICA
 QUÍMICA COMÚN QC- NÚMEROS CUÁNTICOS Y CONFIGURACIÓN ELECTRÓNICA REPRESENTACIÓN DE LOS ELECTRONES MEDIANTE LOS NÚMEROS CUÁNTICOS Como conecuencia del principio de indeterminación e deduce que no e puede
QUÍMICA COMÚN QC- NÚMEROS CUÁNTICOS Y CONFIGURACIÓN ELECTRÓNICA REPRESENTACIÓN DE LOS ELECTRONES MEDIANTE LOS NÚMEROS CUÁNTICOS Como conecuencia del principio de indeterminación e deduce que no e puede
Filtros Activos. Filtros Pasivos
 Filtro Activo Joé Gómez Quiñone Filtro Paivo vi R k vo C n H ( w) r w c Joé Gómez Quiñone Función de Tranferencia Joé Gómez Quiñone Ventaja Filtro Paivo Barato Fácile de Implementar Repueta aproximada
Filtro Activo Joé Gómez Quiñone Filtro Paivo vi R k vo C n H ( w) r w c Joé Gómez Quiñone Función de Tranferencia Joé Gómez Quiñone Ventaja Filtro Paivo Barato Fácile de Implementar Repueta aproximada
IE TEC. Total de Puntos: 71 Puntos obtenidos: Porcentaje: Nota:
 IE TEC Nombre: Intituto Tecnológico de Cota Rica Ecuela de Ingeniería Electrónica EL-70 Modelo de Sitema Profeore: Dr. Pablo Alvarado Moya, Ing. Gabriela Ortiz León, M.Sc. I Semetre, 007 Examen de Suficiencia
IE TEC Nombre: Intituto Tecnológico de Cota Rica Ecuela de Ingeniería Electrónica EL-70 Modelo de Sitema Profeore: Dr. Pablo Alvarado Moya, Ing. Gabriela Ortiz León, M.Sc. I Semetre, 007 Examen de Suficiencia
Capítulo 6: Entropía.
 Capítulo 6: Entropía. 6. La deigualdad de Clauiu La deigualdad de Clauiu no dice que la integral cíclica de δq/ e iempre menor o igual que cero. δq δq (ciclo reverible) Dipoitivo cíclico reverible Depóito
Capítulo 6: Entropía. 6. La deigualdad de Clauiu La deigualdad de Clauiu no dice que la integral cíclica de δq/ e iempre menor o igual que cero. δq δq (ciclo reverible) Dipoitivo cíclico reverible Depóito
COLEGIO LA PROVIDENCIA
 COLEGIO LA PROVIDENCIA Hna de la Providencia y de la Inmaculada Concepción 2013 ALLER MOVIMIENO CIRCULAR UNIFORME DOCENE: Edier Saavedra Urrego Grado: décimo fecha: 16/04/2013 Realice un reumen de la lectura
COLEGIO LA PROVIDENCIA Hna de la Providencia y de la Inmaculada Concepción 2013 ALLER MOVIMIENO CIRCULAR UNIFORME DOCENE: Edier Saavedra Urrego Grado: décimo fecha: 16/04/2013 Realice un reumen de la lectura
UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN
 UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN FACULTAD DE INGENIERÍA MECÁNICA Y ELÉCTRICA INGENIERÍA DE CONTROL PRACTICA N 9 ANÁLISIS DE SISTEMAS DE CONTROL POR LUGAR GEOMÉTRICO DE LAS RAÌCES OBJETIVO Hacer uo del
UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN FACULTAD DE INGENIERÍA MECÁNICA Y ELÉCTRICA INGENIERÍA DE CONTROL PRACTICA N 9 ANÁLISIS DE SISTEMAS DE CONTROL POR LUGAR GEOMÉTRICO DE LAS RAÌCES OBJETIVO Hacer uo del
! y teniendo en cuenta que el movimiento se reduce a una dimensión
 Examen de Fíica-1, 1 Ingeniería Química Examen final Septiembre de 2011 Problema (Do punto por problema) Problema 1 (Primer parcial): Una lancha de maa m navega en un lago con velocidad En el intante t
Examen de Fíica-1, 1 Ingeniería Química Examen final Septiembre de 2011 Problema (Do punto por problema) Problema 1 (Primer parcial): Una lancha de maa m navega en un lago con velocidad En el intante t
s 4 1,65 8 f 4 = +20 cm = 50,8 cm 1,65 1,00 1,00 8 f = 20 cm = 30,8 cm 1,65 1,00
 TEMA 0: ÓPTICA GEOMÉTRICA NOMBRE DEL ALUMNO: CURSO: ºBach GRUPO: ACTIVIDADES PARES DE LAS PAGINAS 320-322 2. Qué ignificado tiene la aproximación de rao paraxiale? Conite en uponer que lo rao inciden obre
TEMA 0: ÓPTICA GEOMÉTRICA NOMBRE DEL ALUMNO: CURSO: ºBach GRUPO: ACTIVIDADES PARES DE LAS PAGINAS 320-322 2. Qué ignificado tiene la aproximación de rao paraxiale? Conite en uponer que lo rao inciden obre
Filtros de Elementos Conmutados
 Filtro de Elemento onmutado Ing. A. amón arga Patrón rvarga@inictel.gob.pe INITEL Introducción En un artículo anterior dearrollamo una teoría general para el filtro activo de variable de etado. e detacó
Filtro de Elemento onmutado Ing. A. amón arga Patrón rvarga@inictel.gob.pe INITEL Introducción En un artículo anterior dearrollamo una teoría general para el filtro activo de variable de etado. e detacó
Práctica 5: Control de Calidad
 Práctica 5: Control de Calidad Objetivo epecífico Al finalizar eta práctica deberá er capaz de: Contruir lo gráfico de control para la media, la deviación típica y el rango (gráfico de control por variable).
Práctica 5: Control de Calidad Objetivo epecífico Al finalizar eta práctica deberá er capaz de: Contruir lo gráfico de control para la media, la deviación típica y el rango (gráfico de control por variable).
Análisis del lugar geométrico de las raíces
 Análii del lugar geométrio de la raíe La araterítia báia de la repueta tranitoria de un itema en lazo errado e relaiona etrehamente on la ubiaión de lo polo en lazo errado. Si el itema tiene una ganania
Análii del lugar geométrio de la raíe La araterítia báia de la repueta tranitoria de un itema en lazo errado e relaiona etrehamente on la ubiaión de lo polo en lazo errado. Si el itema tiene una ganania
6 La transformada de Laplace
 CAPÍTULO 6 La tranformada de Laplace 6. efinición de la tranformada de Laplace 6.. efinición y primera obervacione En la gran mayoría de lo itema de interé para la fíica y la ingeniería e poible (al meno
CAPÍTULO 6 La tranformada de Laplace 6. efinición de la tranformada de Laplace 6.. efinición y primera obervacione En la gran mayoría de lo itema de interé para la fíica y la ingeniería e poible (al meno
. (3.6) 20r log j 20 log j / p log j / p Obtener la expresión del ángulo de fase :
 20r log j 20 log j / p log j / p Obtener la expresión del ángulo de fase :") Aj j... j z z zm G( j). (3.6) r ( j) j j... j p p p n G( j) 0log G( j) db 0 log A 0 log j/ z 0 log j/ z... 0 log j/ zm 0r log j 0 log j/ p... 0 log j/ p. 4. Obtener expreión del ángulo de fae : G( j) A(
Aj j... j z z zm G( j). (3.6) r ( j) j j... j p p p n G( j) 0log G( j) db 0 log A 0 log j/ z 0 log j/ z... 0 log j/ zm 0r log j 0 log j/ p... 0 log j/ p. 4. Obtener expreión del ángulo de fae : G( j) A(
ÓPTICA GEOMÉTRICA. ; 2s s 40 + =
 ÓPTICA GEOMÉTRICA Modelo 06. Pregunta 4a.- Se deea obtener una imagen virtual de doble tamaño que un objeto. Si e utiliza: a) Un epejo cóncavo de 40 cm de ditancia focal, determine la poicione del objeto
ÓPTICA GEOMÉTRICA Modelo 06. Pregunta 4a.- Se deea obtener una imagen virtual de doble tamaño que un objeto. Si e utiliza: a) Un epejo cóncavo de 40 cm de ditancia focal, determine la poicione del objeto
Procesamiento Digital de Señales Octubre 2012
 Proceaiento Digital de Señale Octubre 0 Método de ntitranforación PROCESMIENTO DIGITL DE SEÑLES Tranforada Z - (Parte II) Hay tre étodo de antitranforación, o Tranforación Z Invera para obtener la función
Proceaiento Digital de Señale Octubre 0 Método de ntitranforación PROCESMIENTO DIGITL DE SEÑLES Tranforada Z - (Parte II) Hay tre étodo de antitranforación, o Tranforación Z Invera para obtener la función
LENTE CONVERGENTE 2: Imágenes en una lente convergente
 LENTE CONVERGENTE : Imágene en una lente convergente Fundamento En una lente convergente delgada e conidera el eje principal como la recta perpendicular a la lente y que paa por u centro. El corte de eta
LENTE CONVERGENTE : Imágene en una lente convergente Fundamento En una lente convergente delgada e conidera el eje principal como la recta perpendicular a la lente y que paa por u centro. El corte de eta
Análisis En El Dominio De La Frecuencia
 Análii En El Dominio De La Frecuencia.-Introducción..-Repueta en frecuencia...-diagrama cero-polar. 3.-Repreentación gráfica de la repueta en frecuencia. 3..-Diagrama de Bode. 3..-Diagrama polar (Nyquit.
Análii En El Dominio De La Frecuencia.-Introducción..-Repueta en frecuencia...-diagrama cero-polar. 3.-Repreentación gráfica de la repueta en frecuencia. 3..-Diagrama de Bode. 3..-Diagrama polar (Nyquit.
05/04/2011 Diana Cobos
 Diana Cobo a cola on frecuente en nuetra vida cotidiana: En un banco En un retaurante de comida rápida Al matricular en la univeridad o auto en un autolavado 2 En general, a nadie le guta eperar. Cuando
Diana Cobo a cola on frecuente en nuetra vida cotidiana: En un banco En un retaurante de comida rápida Al matricular en la univeridad o auto en un autolavado 2 En general, a nadie le guta eperar. Cuando
Lugar geométrico de las raíces
 Lugar geométrio de la raíe Análii del lugar geométrio de la raíe La araterítia báia de la repueta tranitoria de un itema en lazo errado e relaiona etrehamente on la ubiaión de lo polo en lazo errado. Si
Lugar geométrio de la raíe Análii del lugar geométrio de la raíe La araterítia báia de la repueta tranitoria de un itema en lazo errado e relaiona etrehamente on la ubiaión de lo polo en lazo errado. Si
Fuente de Alimentación de Tensión
 14/05/014 Fuente de Alimentación de Tenión Fuente de alimentación: dipoitivo que convierte la tenión alterna de la red de uminitro (0 ), en una o varia tenione, prácticamente continua, que alimentan a
14/05/014 Fuente de Alimentación de Tenión Fuente de alimentación: dipoitivo que convierte la tenión alterna de la red de uminitro (0 ), en una o varia tenione, prácticamente continua, que alimentan a
1. Modelos Orientados al Proceso. 1. Modelos Orientados al Proceso 1
 . Modelo Orientado al Proceo. Modelo Orientado al Proceo.. Introducción.. Mecanimo de Muetreo.3. Modelo de Modulación.3.. Modelo de un Muetreador-Retenedor 3.3.. Repueta a una entrada u: 5.3.3. Simulación
. Modelo Orientado al Proceo. Modelo Orientado al Proceo.. Introducción.. Mecanimo de Muetreo.3. Modelo de Modulación.3.. Modelo de un Muetreador-Retenedor 3.3.. Repueta a una entrada u: 5.3.3. Simulación
Comportamiento del nivel de líquido en un sistema de dos tanques en serie
 Comportamiento del nivel de líquido en un itema de do tanque en erie Marcela Echavarria R., Gloria Lucía Orozco C., Alan Didier Pérez Á. Abtract Se deea conocer el comportamiento del nivel de un itema
Comportamiento del nivel de líquido en un itema de do tanque en erie Marcela Echavarria R., Gloria Lucía Orozco C., Alan Didier Pérez Á. Abtract Se deea conocer el comportamiento del nivel de un itema
ACTIVIDADES RESUELTAS T 3 MCU Ley de Gravitación Universal. Actividad 1.- Define movimiento circular uniforme, radio vector y desplazamiento angular.
 ACTIVIDADES RESUELTAS T 3 MCU Ley de Gravitación Univeral Actividad 1.- Define movimiento circular uniforme, radio vector y deplazamiento angular. Movimiento circular uniforme (MCU) e el movimiento de
ACTIVIDADES RESUELTAS T 3 MCU Ley de Gravitación Univeral Actividad 1.- Define movimiento circular uniforme, radio vector y deplazamiento angular. Movimiento circular uniforme (MCU) e el movimiento de
Examen de Sistemas Automáticos Agosto 2013
 Examen de Sitema Automático Agoto 203 Ej. Ej. 2 Ej. 3 Ej. 4 Total Apellido, Nombre: Sección: Fecha: 20 de agoto de 203 Atención: el enunciado conta de tre ejercicio práctico y un tet de repueta múltiple
Examen de Sitema Automático Agoto 203 Ej. Ej. 2 Ej. 3 Ej. 4 Total Apellido, Nombre: Sección: Fecha: 20 de agoto de 203 Atención: el enunciado conta de tre ejercicio práctico y un tet de repueta múltiple
C U R S O: FÍSICA COMÚN MATERIAL: FC-02 CINEMÁTICA I
 C U R S O: FÍSICA COMÚN MATERIAL: FC-2 CINEMÁTICA I La Cinemática etudia el movimiento de lo cuerpo, in preocupare de la caua que lo generan. Por ejemplo, al analizar el deplazamiento de un automóvil,
C U R S O: FÍSICA COMÚN MATERIAL: FC-2 CINEMÁTICA I La Cinemática etudia el movimiento de lo cuerpo, in preocupare de la caua que lo generan. Por ejemplo, al analizar el deplazamiento de un automóvil,
El estudio teórico de la práctica se realiza en el problema PTC
 PRÁCTICA LTC-1: REFLEXIONES EN UN PAR TRENZADO 1.- Decripción de la práctica a) Excitar un cable de pare de 50 metro de longitud con un pulo de tenión de 0 a 10 voltio, 100 Khz frecuencia y un duty cycle
PRÁCTICA LTC-1: REFLEXIONES EN UN PAR TRENZADO 1.- Decripción de la práctica a) Excitar un cable de pare de 50 metro de longitud con un pulo de tenión de 0 a 10 voltio, 100 Khz frecuencia y un duty cycle
TRIEDRO DE FRENET. γ(t) 3 T(t)
 3 T(t)") TRIEDRO DE FRENET Matemática II Sea Γ R 3 una curva y ean γ : I = [a,b] R 3, γ(t = (x(t,y(t,z(t una parametrización regular y α : I = [a,b ] R 3 u parametrización repecto el parámetro arco. A partir de
TRIEDRO DE FRENET Matemática II Sea Γ R 3 una curva y ean γ : I = [a,b] R 3, γ(t = (x(t,y(t,z(t una parametrización regular y α : I = [a,b ] R 3 u parametrización repecto el parámetro arco. A partir de
Líneas de Espera: Teoría de Colas. Curso Métodos Cuantitativos Prof. Lic. Gabriel Leandro
 ínea de Epera: Teoría de Cola Curo Método Cuantitativo Prof. ic. Gabriel eandro a cola a cola on frecuente en nuetra vida cotidiana: En un banco En un retaurante de comida rápida Al matricular en la univeridad
ínea de Epera: Teoría de Cola Curo Método Cuantitativo Prof. ic. Gabriel eandro a cola a cola on frecuente en nuetra vida cotidiana: En un banco En un retaurante de comida rápida Al matricular en la univeridad
Respuesta transitoria
 Capítulo 4 Respuesta transitoria Una ves que los diagramas a bloques son desarrollados, el siguiente paso es llevar a cabo el análisis de los sistemas. Existen dos tipos de análisis: cuantitativo y cualitativo.
Capítulo 4 Respuesta transitoria Una ves que los diagramas a bloques son desarrollados, el siguiente paso es llevar a cabo el análisis de los sistemas. Existen dos tipos de análisis: cuantitativo y cualitativo.
Sistemas de orden superior
 7 Sitema de orden uperior Hata ahora ólo e ha etudiado la repueta del régimen tranitorio de lo itema de primer y egundo orden imple. En ete capítulo e pretende analizar la evolución temporal de itema de
7 Sitema de orden uperior Hata ahora ólo e ha etudiado la repueta del régimen tranitorio de lo itema de primer y egundo orden imple. En ete capítulo e pretende analizar la evolución temporal de itema de
SISTEMAS MECANICOS EJEMPLO 1.- SISTEMA MECANICO TRASLACIONAL. Carrito que se desplaza en línea recta en dirección horizontal.
 SISTEAS ECANICOS EJEPLO.- SISTEA ECANICO TRASLACIONAL Carrito que e deplaza en línea recta en dirección horizontal. Ft) 0 yt) Objetivo: Determinar la repueta dinámica del deplazamiento del carrito yt)
SISTEAS ECANICOS EJEPLO.- SISTEA ECANICO TRASLACIONAL Carrito que e deplaza en línea recta en dirección horizontal. Ft) 0 yt) Objetivo: Determinar la repueta dinámica del deplazamiento del carrito yt)
MEDIDAS DE DISPERSION
 MEDIDAS DE DISPERSION Un promedio puede er engañoo a meno que ea identicado y vaya acompañado por otra información que informe la deviacione de lo dato repecto a la medida de tendencia central eleccionada.
MEDIDAS DE DISPERSION Un promedio puede er engañoo a meno que ea identicado y vaya acompañado por otra información que informe la deviacione de lo dato repecto a la medida de tendencia central eleccionada.
Solución: a) A dicha distancia la fuerza centrífuga iguala a la fuerza de rozamiento, por lo que se cumple: ω r= m mg 0, 4 9,8.
 A dicha distancia la fuerza centrífuga iguala a la fuerza de rozamiento, por lo que se cumple: ω r= m mg 0, 4 9,8.") C.- Una plataforma gira alrededor de un eje vertical a razón de una vuelta por egundo. Colocamo obre ella un cuerpo cuyo coeficiente etático de rozamiento e 0,4. a) Calcular la ditancia máxima al eje de
C.- Una plataforma gira alrededor de un eje vertical a razón de una vuelta por egundo. Colocamo obre ella un cuerpo cuyo coeficiente etático de rozamiento e 0,4. a) Calcular la ditancia máxima al eje de
Circuitos. Circuito Operacional y Circuito Complejo Marzo 2003
 ircuito. ircuito Operacional y ircuito omplejo Marzo 003 POBLEMA.1 El circuito de la Figura etá alimentado por un generador de tenión e(t) y otro de corriente i(t). Según lo valore numérico ue e dan a
ircuito. ircuito Operacional y ircuito omplejo Marzo 003 POBLEMA.1 El circuito de la Figura etá alimentado por un generador de tenión e(t) y otro de corriente i(t). Según lo valore numérico ue e dan a
Capítulo 4. R a. R b -15 V R 3 R P R 4. v Z. Palabras clave: termopar tipo T, compensación de la unión de referencia, termómetro, AD590.
 5//8 Senore generadore y u acondicionadore apítulo Nota: La ecuacione, figura y problema citado en el dearrollo de lo problema de ete capítulo que no contengan W en u referencia correponden al libro impreo.
5//8 Senore generadore y u acondicionadore apítulo Nota: La ecuacione, figura y problema citado en el dearrollo de lo problema de ete capítulo que no contengan W en u referencia correponden al libro impreo.
MA26A, Auxiliar 5, 26 de Abril, 2007
 MA26A, Auxiliar 5, 26 de Abril, 27 Profeor Cátedra: Raúl Manaevich Profeor Auxiliar : Alfredo Núnez. Tranformada de Laplace... Sea f : [, ) R función continua a trozo y de orden exponencial. Demuetre que
MA26A, Auxiliar 5, 26 de Abril, 27 Profeor Cátedra: Raúl Manaevich Profeor Auxiliar : Alfredo Núnez. Tranformada de Laplace... Sea f : [, ) R función continua a trozo y de orden exponencial. Demuetre que
Práctica Tiro Parabólico
 página 1/5 Práctica Tiro Parabólico Planteamiento Deeamo etimar la velocidad en un intante determinado de un ólido que cae por una pendiente, bajo la hipótei de movimiento uniformemente acelerado (m.u.a.)
página 1/5 Práctica Tiro Parabólico Planteamiento Deeamo etimar la velocidad en un intante determinado de un ólido que cae por una pendiente, bajo la hipótei de movimiento uniformemente acelerado (m.u.a.)
Descripción Diagramas de bloques originales CONMUTATIVA PARA LA SUMA. Diagramas de bloques equivalentes MOVIMIENTO A LA IZQUIERDA DE UN
 Decripción Diagrama de bloue originale ONMUTATIVA AA A SUMA Diagrama de bloue euivalente 8 MOVIMIENTO A A IZUIEDA DE UN UNTO DE BIFUAIÓN DISTIBUTIVA A A SUMA 9 MOVIMIENTO A A DEEA DE UN UNTO DE BIFUAIÓN
Decripción Diagrama de bloue originale ONMUTATIVA AA A SUMA Diagrama de bloue euivalente 8 MOVIMIENTO A A IZUIEDA DE UN UNTO DE BIFUAIÓN DISTIBUTIVA A A SUMA 9 MOVIMIENTO A A DEEA DE UN UNTO DE BIFUAIÓN
TEMA I DIAGRAMAS DE BLOQUES, FLUJOGRAMAS Y SUS OPERACIONES. Universidad de Oriente Núcleo de Anzoátegui Escuela de Ingeniería y Ciencias Aplicadas
 Título Univeridad de Oriente Núcleo de nzoátegui Ecuela de Ingeniería y Ciencia plicada Dpto de Computación y Sitema TEM I DIRMS DE OQUES, FUJORMS Y SUS OPERCIONES Ec. De Ing. Y C. plicada Tema I: Diag
Título Univeridad de Oriente Núcleo de nzoátegui Ecuela de Ingeniería y Ciencia plicada Dpto de Computación y Sitema TEM I DIRMS DE OQUES, FUJORMS Y SUS OPERCIONES Ec. De Ing. Y C. plicada Tema I: Diag
Academia de Análisis Mecánico, DSM-DIM. Cinemática de Mecanismos. Análisis de Velocidades de Mecanismos por el Método del Polígono.
 Cinemática de Mecanimo Análii de elocidade de Mecanimo por el Método del Polígono. DEFINICION DE ELOCIDAD La velocidad e define como la razón de cambio de la poición con repecto al tiempo. La poición (R)
Cinemática de Mecanimo Análii de elocidade de Mecanimo por el Método del Polígono. DEFINICION DE ELOCIDAD La velocidad e define como la razón de cambio de la poición con repecto al tiempo. La poición (R)
Valores especiales de la función zeta
 Valore epeciale de la función zeta Alexey Behenov cadadr@gmail.com de Marzo de 7 La función zeta de Riemann Definición. La función zeta de Riemann etá definida por la erie infinita ζ := n n = + + 3 + 4
Valore epeciale de la función zeta Alexey Behenov cadadr@gmail.com de Marzo de 7 La función zeta de Riemann Definición. La función zeta de Riemann etá definida por la erie infinita ζ := n n = + + 3 + 4
ECUACIÓN DE OSCILACIONES. Tomado del texto de Ecuaciones Diferenciales de los Profesores. Norman Mercado. Luis Ignacio Ordoñéz
 ECUACIÓN DE OSCILACIONES Tomado del texto de Ecuaciones Diferenciales de los Profesores Norman Mercado Luis Ignacio Ordoñéz Muchos de los sistemas de ingeniería están regidos por una ecuación diferencial
ECUACIÓN DE OSCILACIONES Tomado del texto de Ecuaciones Diferenciales de los Profesores Norman Mercado Luis Ignacio Ordoñéz Muchos de los sistemas de ingeniería están regidos por una ecuación diferencial
Teoría de Sistemas y Señales
 Teoría de Sitema y Señale Señale en Tiempo Dicreto Teorema de Muetreo Autor: Dr. Juan Carlo Gómez Señale en Tiempo Continuo: etán definida en un intervalo continuo de tiempo. Señale en tiempo dicreto:
Teoría de Sitema y Señale Señale en Tiempo Dicreto Teorema de Muetreo Autor: Dr. Juan Carlo Gómez Señale en Tiempo Continuo: etán definida en un intervalo continuo de tiempo. Señale en tiempo dicreto:
Modelos de generadores asíncronos para la evaluación de perturbaciones emitidas por parques eólicos
 eunión de Grupo de Invetigación en Ingeniería Eléctrica. Santander Modelo de generadore aíncrono para la evaluación de perturbacione emitida por parque eólico A. Feijóo, J. Cidrá y C. Carrillo Univeridade
eunión de Grupo de Invetigación en Ingeniería Eléctrica. Santander Modelo de generadore aíncrono para la evaluación de perturbacione emitida por parque eólico A. Feijóo, J. Cidrá y C. Carrillo Univeridade
CINEMÁTICA II. ) cuerpos de diferentes masas desde la misma altura, llegarán al suelo con la misma velocidad y en el mismo instante de tiempo.
 cuerpos de diferentes masas desde la misma altura, llegarán al suelo con la misma velocidad y en el mismo instante de tiempo.") C U R S O: FÍSICA MENCIÓN MATERIAL: FM-3 CINEMÁTICA II CAIDA LIBRE En cinemática, la caída libre e un movimiento dónde olamente influye la gravedad. En ete movimiento e deprecia el rozamiento del cuerpo
C U R S O: FÍSICA MENCIÓN MATERIAL: FM-3 CINEMÁTICA II CAIDA LIBRE En cinemática, la caída libre e un movimiento dónde olamente influye la gravedad. En ete movimiento e deprecia el rozamiento del cuerpo
CARGA Y DESCARGA DE UN CONDENSADOR
 Laboratorio de Fíica de Proceo Biológico AGA Y DESAGA DE UN ONDENSADO Fecha: 3/2/2006. Objetivo de la práctica Etudio de la carga y la decarga de un condenador; medida de u capacidad 2. Material Fuente
Laboratorio de Fíica de Proceo Biológico AGA Y DESAGA DE UN ONDENSADO Fecha: 3/2/2006. Objetivo de la práctica Etudio de la carga y la decarga de un condenador; medida de u capacidad 2. Material Fuente
DISEÑO ECONÓMICO DE CARTAS DE CONTROL X ASUMIENDO DISTRIBUCIÓN GAMMA
 DISEÑO ECONÓMICO DE CARTAS DE CONTROL X ASUMIENDO DISTRIBUCIÓN GAMMA I.M. González and E. Vile Ecuela Superior de Ingeniero, Univeridad de Navarra, P. Manuel de Lardizábal, 8 San Sebatián, Epaña. E-mail:
DISEÑO ECONÓMICO DE CARTAS DE CONTROL X ASUMIENDO DISTRIBUCIÓN GAMMA I.M. González and E. Vile Ecuela Superior de Ingeniero, Univeridad de Navarra, P. Manuel de Lardizábal, 8 San Sebatián, Epaña. E-mail:
La solución del problema requiere de una primera hipótesis:
 RIOS 9 Cuarto Simpoio Regional obre Hidráulica de Río. Salta, Argentina, 9. CALCULO HIDRAULICO EN RIOS Y DISEÑO DE CANALES ESTABLES SIN USAR ECUACIONES TRADICIONALES Eduardo E. Martínez Pérez Profeor agregado
RIOS 9 Cuarto Simpoio Regional obre Hidráulica de Río. Salta, Argentina, 9. CALCULO HIDRAULICO EN RIOS Y DISEÑO DE CANALES ESTABLES SIN USAR ECUACIONES TRADICIONALES Eduardo E. Martínez Pérez Profeor agregado
TEMA 4: El movimiento circular uniforme
 TEMA 4: El moimiento circular uniforme Tema 4: El moimiento circular uniforme 1 ESQUEMA DE LA UNIDAD 1.- Caracterítica del moimiento circular uniforme. 2.- Epacio recorrido y ángulo barrido. 2.1.- Epacio
TEMA 4: El moimiento circular uniforme Tema 4: El moimiento circular uniforme 1 ESQUEMA DE LA UNIDAD 1.- Caracterítica del moimiento circular uniforme. 2.- Epacio recorrido y ángulo barrido. 2.1.- Epacio
1. Cómo sabemos que un cuerpo se está moviendo?
 EL MOVIMIENTO. CONCEPTOS INICIALES I.E.S. La Magdalena. Avilé. Aturia A la hora de etudiar el movimiento de un cuerpo el primer problema con que no encontramo etá en determinar, preciamente, i e etá moviendo
EL MOVIMIENTO. CONCEPTOS INICIALES I.E.S. La Magdalena. Avilé. Aturia A la hora de etudiar el movimiento de un cuerpo el primer problema con que no encontramo etá en determinar, preciamente, i e etá moviendo
respecto del eje de las x: 30º 45º a) 6.00 unidades y 90º b) 2.16 unidades y 80º x c) 2.65 unidades y 70º d) 2.37 unidades y 52º C r
 6.00 unidades y 90º b) 2.16 unidades y 80º x c) 2.65 unidades y 70º d) 2.37 unidades y 52º C r") Guía de Fíica I. Vectore. 1. Conidere lo vectore A ByC r r r,. Su valore y aboluto, en unidade arbitraria, on de 3, 2 y 1 repectivamente. Entonce el vector reultante r r r r D = A + B + C erá de valor
Guía de Fíica I. Vectore. 1. Conidere lo vectore A ByC r r r,. Su valore y aboluto, en unidade arbitraria, on de 3, 2 y 1 repectivamente. Entonce el vector reultante r r r r D = A + B + C erá de valor
TEMA N 4.- TEORÍA DE DECISIONES
 UNIVERSIDAD DE ORIENTE NÚCLEO DE ANZOÁTEGUI EXTENSIÓN REGIÓN CENTRO-SUR ANACO, ESTADO ANZOÁTEGUI 4.1 Análii de deciione TEMA N 4.- TEORÍA DE DECISIONES Aignatura: Invetigación Operativa I Docente: Ing.
UNIVERSIDAD DE ORIENTE NÚCLEO DE ANZOÁTEGUI EXTENSIÓN REGIÓN CENTRO-SUR ANACO, ESTADO ANZOÁTEGUI 4.1 Análii de deciione TEMA N 4.- TEORÍA DE DECISIONES Aignatura: Invetigación Operativa I Docente: Ing.
Física P.A.U. ÓPTICA GEOMÉTRICA 1 ÓPTICA GEOMÉTRICA
 íica P.A.U. ÓPTICA GEOMÉTRICA ÓPTICA GEOMÉTRICA INTRODUCCIÓN MÉTODO. En general: Se dibuja un equema con lo rayo. Se compara el reultado del cálculo con el equema. 2. En lo problema de lente: Se traza
íica P.A.U. ÓPTICA GEOMÉTRICA ÓPTICA GEOMÉTRICA INTRODUCCIÓN MÉTODO. En general: Se dibuja un equema con lo rayo. Se compara el reultado del cálculo con el equema. 2. En lo problema de lente: Se traza
El estudio teórico de la práctica se realiza en el problema PTC0004-21
 PRÁCTICA LTC-14: REFLEXIONES EN UN CABLE COAXIAL 1.- Decripción de la práctica a) Excitar un cable coaxial de 50 metro de longitud con un pulo de tenión de 0 a 10 voltio, 100 Khz frecuencia y un duty cycle
PRÁCTICA LTC-14: REFLEXIONES EN UN CABLE COAXIAL 1.- Decripción de la práctica a) Excitar un cable coaxial de 50 metro de longitud con un pulo de tenión de 0 a 10 voltio, 100 Khz frecuencia y un duty cycle
ELEMENTOS DEL MOVIMIENTO
 1 ELEMENTOS DEL MOVIMIENTO Poición 1.- Ecribe el vector de poición y calcula u módulo correpondiente para lo iguiente punto: P1 (4,, 1), P ( 3,1,0) y P3 (1,0, 5); La unidade de la coordenada etán en el
1 ELEMENTOS DEL MOVIMIENTO Poición 1.- Ecribe el vector de poición y calcula u módulo correpondiente para lo iguiente punto: P1 (4,, 1), P ( 3,1,0) y P3 (1,0, 5); La unidade de la coordenada etán en el
CAPÍTULO 4. INTEGRACIÓN DE FUNCIONES RACIONALES 4.1. Introducción 4.2. Raíces comunes 4.3. División entera de polinomios 4.4. Descomposición de un
 CAPÍTULO. INTEGRACIÓN DE FUNCIONES RACIONALES.. Introducción.. Raíce comune.. Diviión entera de polinomio.. Decompoición de un polinomio en producto de factore.5. Método de fraccione imple.6. Método de
CAPÍTULO. INTEGRACIÓN DE FUNCIONES RACIONALES.. Introducción.. Raíce comune.. Diviión entera de polinomio.. Decompoición de un polinomio en producto de factore.5. Método de fraccione imple.6. Método de
MAESTRIA EN INGENIERIA DE CONTROL INDUSTRIAL. Con el apoyo académico de la Universidad Católica de Lovaina y la Universidad de Gante (Bélgica)
") MAESTRIA EN INGENIERIA DE CONTROL INDUSTRIAL Con el apoyo académico de la Univeridad Católica de Lovaina y la Univeridad de Gante Bélgica PROGRAMA DE AUTOMATIZACION INDUSTRIAL Univeridad de Ibagué Marzo
MAESTRIA EN INGENIERIA DE CONTROL INDUSTRIAL Con el apoyo académico de la Univeridad Católica de Lovaina y la Univeridad de Gante Bélgica PROGRAMA DE AUTOMATIZACION INDUSTRIAL Univeridad de Ibagué Marzo
Ejercicios de ECUACIONES DIFERENCIALES ORDINARIAS
 Ejercicios de ECUACIONES DIFERENCIALES ORDINARIAS Grado en Matemáticas Curso 203-204 . Ecuaciones lineales con coeficientes constantes Ecuaciones de primer orden. Encontrar la solución de los siguientes
Ejercicios de ECUACIONES DIFERENCIALES ORDINARIAS Grado en Matemáticas Curso 203-204 . Ecuaciones lineales con coeficientes constantes Ecuaciones de primer orden. Encontrar la solución de los siguientes
TEMA - IV ESPEJOS. 1. ESPEJOS ESFÉRICOS.
 IV - 0 TEMA - IV ESPEJOS.. ESPEJOS ESFÉRICOS... Poición de la imagen..2. Foco y ditancia focal..3. Potencia..4. Formación de imágene..4.. Marcha de lo rayo..4.2. Imágene en epejo cóncavo..4.3. Imágene
IV - 0 TEMA - IV ESPEJOS.. ESPEJOS ESFÉRICOS... Poición de la imagen..2. Foco y ditancia focal..3. Potencia..4. Formación de imágene..4.. Marcha de lo rayo..4.2. Imágene en epejo cóncavo..4.3. Imágene
ESTADÍSTICA DESCRIPTIVA BIDIMENSIONAL VARIABLES BIDIMENSIONALES
 ESTADÍSTICA DESCRIPTIVA BIDIMENSIONAL VARIABLES BIDIMENSIONALES Hata ahora la erie etadítica etudiada etaban aociada a variable etadítica unidimenionale, e decir e etudiaba un olo carácter de la población.
ESTADÍSTICA DESCRIPTIVA BIDIMENSIONAL VARIABLES BIDIMENSIONALES Hata ahora la erie etadítica etudiada etaban aociada a variable etadítica unidimenionale, e decir e etudiaba un olo carácter de la población.
Universidad de Chile
 Univeridad de Chile Facultad de Ciencia fíica y Matemática Departamento de Ingeniería Eléctrica SD-20A Seminario de Dieño Guía Teórica N o 2 Circuito Generador de forma de onda (ocilador) Profeore : Javier
Univeridad de Chile Facultad de Ciencia fíica y Matemática Departamento de Ingeniería Eléctrica SD-20A Seminario de Dieño Guía Teórica N o 2 Circuito Generador de forma de onda (ocilador) Profeore : Javier
Transmisión Digital Paso Banda
 Tranmiión Digital Pao Banda PRÁCTICA 9 ( eione) Laboratorio de Señale y Comunicacione 3 er curo Ingeniería de Telecomunicación Javier Ramo Fernando Díaz de María y David Luengo García 1. Objetivo Simular
Tranmiión Digital Pao Banda PRÁCTICA 9 ( eione) Laboratorio de Señale y Comunicacione 3 er curo Ingeniería de Telecomunicación Javier Ramo Fernando Díaz de María y David Luengo García 1. Objetivo Simular
EJERCICIOS PROPUESTOS SOBRE SISTEMAS DE 1er y 2do ORDEN
 EJERCICIOS PROPUESTOS SOBRE SISTEMAS DE 1er y 2do ORDEN 1. Para la función de transferencia G(s), cuya entrada proviene de un controlador proporcional de ganancia A, y que se encuentran en lazo cerrado
EJERCICIOS PROPUESTOS SOBRE SISTEMAS DE 1er y 2do ORDEN 1. Para la función de transferencia G(s), cuya entrada proviene de un controlador proporcional de ganancia A, y que se encuentran en lazo cerrado
SECUENCIA DIDÁCTICA TEÓRICA - PRÁCTICA
 SECUENCIA DIDÁCTICA TEÓRICA - PRÁCTICA * Análii de Sitema en el Dominio del Tiempo. * I. NOMBRE : Análii de Sitema en el Dominio del Tiempo. II. OBJETIVOS : El etudiante conocerá y aplicará un oftware
SECUENCIA DIDÁCTICA TEÓRICA - PRÁCTICA * Análii de Sitema en el Dominio del Tiempo. * I. NOMBRE : Análii de Sitema en el Dominio del Tiempo. II. OBJETIVOS : El etudiante conocerá y aplicará un oftware
DEPARTAMENTO DE ELECTRONICA Y AUTOMATICA
 Universidad Nacional de San Juan - Facultad de Ingeniería DEPARTAMENTO DE ELECTRONICA Y AUTOMATICA Carrera: Ingeniería Electrónica Área CONTROL Asignatura: CONTROL I GUIA DE APRENDIZAJE Y AUTOEVALUACION
Universidad Nacional de San Juan - Facultad de Ingeniería DEPARTAMENTO DE ELECTRONICA Y AUTOMATICA Carrera: Ingeniería Electrónica Área CONTROL Asignatura: CONTROL I GUIA DE APRENDIZAJE Y AUTOEVALUACION
AMPLIACIÓN DE MATEMÁTICAS Ingeniería Técnica Industrial. Especialidad en Electrónica Industrial Boletín n o 4
 AMPLIACIÓN DE MATEMÁTICAS Ingeniería Técnica Indutrial. Epecialidad en Electrónica Indutrial Boletín n o. Hallar la tranformada de Laplace de cada una de la iguiente funcione: a) n Ch n + Sh n) b) en c)
AMPLIACIÓN DE MATEMÁTICAS Ingeniería Técnica Indutrial. Epecialidad en Electrónica Indutrial Boletín n o. Hallar la tranformada de Laplace de cada una de la iguiente funcione: a) n Ch n + Sh n) b) en c)
Capítulo VI FRICCIÓN. s (max) f en el instante que el movimiento del cuerpo es inminente. En esa 6.1 INTRODUCCIÓN 6.2 FRICCIÓN ESTÁTICA
 f en el instante que el movimiento del cuerpo es inminente. En esa 6.1 INTRODUCCIÓN 6.2 FRICCIÓN ESTÁTICA") RICCIÓ Capítulo VI 6.1 ITRODUCCIÓ La ricción e un enómeno que e preenta entre la upericie rugoa de do cuerpo ólido en contacto, o entre la upericie rugoa de un cuerpo ólido un luido en contacto, cuando
RICCIÓ Capítulo VI 6.1 ITRODUCCIÓ La ricción e un enómeno que e preenta entre la upericie rugoa de do cuerpo ólido en contacto, o entre la upericie rugoa de un cuerpo ólido un luido en contacto, cuando
GEOMETRÍA ANALÍTICA 8.2 ECUACIONES DE UNA RECTA. Para determinar una recta necesitamos una de estas dos condiciones
 GEOMETRÍA ANALÍTICA 8. ECUACIONES DE UNA RECTA Para determinar una recta neceitamo una de eta do condicione 1. Un punto P(x, y ) y un vector V = (a,b). Do punto P(x, y ), Q(x 1, y 1 ) Un punto P(x, y )
GEOMETRÍA ANALÍTICA 8. ECUACIONES DE UNA RECTA Para determinar una recta neceitamo una de eta do condicione 1. Un punto P(x, y ) y un vector V = (a,b). Do punto P(x, y ), Q(x 1, y 1 ) Un punto P(x, y )
2. Estabilidad en Sistemas Lineales Invariantes en el Tiempo.
 Capítulo 3 2. Estabilidad en Sistemas Lineales Invariantes en el Tiempo. 3.1 Introducción Un sistema estable se define como aquel que tiene una respuesta limitada. Es decir, un sistema es estable si estando
Capítulo 3 2. Estabilidad en Sistemas Lineales Invariantes en el Tiempo. 3.1 Introducción Un sistema estable se define como aquel que tiene una respuesta limitada. Es decir, un sistema es estable si estando
TEMA 4: Análisis de sistemas
 Dinámica de Sitema -4.- TEMA 4: Análii de itema 4..- Introducción. 4..- Efecto de lo polo en el comportamiento. 4.3.- Etabilidad 4.4.- Señale de prueba, tipo de repueta repueta y comportamiento. 4.5.-
Dinámica de Sitema -4.- TEMA 4: Análii de itema 4..- Introducción. 4..- Efecto de lo polo en el comportamiento. 4.3.- Etabilidad 4.4.- Señale de prueba, tipo de repueta repueta y comportamiento. 4.5.-
Hidrodinámica. Elaborado por: Ing. Enriqueta Del Ángel Hernández. Noviembre, 2014
 Hidrodinámica Elaborado por: Ing. Enriqueta Del Ángel Hernández Noviembre, 01 http://www.uaeh.edu.mx/virtual HIDRODINÁMICA Etudia el comportamiento del movimiento de lo fluido; en í la hidrodinámica e
Hidrodinámica Elaborado por: Ing. Enriqueta Del Ángel Hernández Noviembre, 01 http://www.uaeh.edu.mx/virtual HIDRODINÁMICA Etudia el comportamiento del movimiento de lo fluido; en í la hidrodinámica e
Unidad I Análisis de Sistemas Realimentados
 Prof. Gerardo Torres - gerardotorres@ula.ve - Cubículo 003 Departamento de Circuitos y Medidas de la Escuela de Ingeniería Eléctrica de la Universidad de Los Andes Unidad I Análisis de Sistemas Realimentados
Prof. Gerardo Torres - gerardotorres@ula.ve - Cubículo 003 Departamento de Circuitos y Medidas de la Escuela de Ingeniería Eléctrica de la Universidad de Los Andes Unidad I Análisis de Sistemas Realimentados
Realizado por: Juan Manuel Bardallo González Miguel Ángel de Vega Alcántara
 CONTROL POR COMPUTADOR Temario. Ingeniería Informática. Realiado por: Juan Manuel Bardallo Gonále Miguel Ángel de Vega Alcántara Huelva. Curo 06/07. INDICE Tema. MODELIZACIÓN DE SISTEMAS DISCRETOS. Introducción..
CONTROL POR COMPUTADOR Temario. Ingeniería Informática. Realiado por: Juan Manuel Bardallo Gonále Miguel Ángel de Vega Alcántara Huelva. Curo 06/07. INDICE Tema. MODELIZACIÓN DE SISTEMAS DISCRETOS. Introducción..
Antecedentes de Control
 Apéndice A Antecedentes de Control Para cualquier tipo de análisis de sistemas de control, es importante establecer ciertos conceptos básicos. Sistemas de control retroalimentados Un sistema que mantiene
Apéndice A Antecedentes de Control Para cualquier tipo de análisis de sistemas de control, es importante establecer ciertos conceptos básicos. Sistemas de control retroalimentados Un sistema que mantiene
ELEMENTOS DEL MOVIMIENTO.
 1 Poición y deplazaiento. ELEMENTOS DEL MOVIMIENTO. Ejercicio de la unidad 11 1.- Ecribe el vector de poición y calcula u ódulo correpondiente para lo iguiente punto: P 1 (4,, 1), P ( 3,1,0) y P 3 (1,0,
1 Poición y deplazaiento. ELEMENTOS DEL MOVIMIENTO. Ejercicio de la unidad 11 1.- Ecribe el vector de poición y calcula u ódulo correpondiente para lo iguiente punto: P 1 (4,, 1), P ( 3,1,0) y P 3 (1,0,
CAPÍTULO TRES. FUNCIÓN DE TRANSFERENCIA Y COMPORTAMIENTO TRANSITORIO DE SISTEMAS MUESTREADOS.
 CAPÍULO RES. FUNCIÓN DE RANSFERENCIA Y COMPORAMIENO RANSIORIO DE SISEMAS MUESREADOS. III.. FUNCIÓN DE RANSFERENCIA. En forma análoga a como e define la función de tranferencia en un itema continuo, e oible
CAPÍULO RES. FUNCIÓN DE RANSFERENCIA Y COMPORAMIENO RANSIORIO DE SISEMAS MUESREADOS. III.. FUNCIÓN DE RANSFERENCIA. En forma análoga a como e define la función de tranferencia en un itema continuo, e oible
Movimiento rectilíneo uniformemente variado (parte 2)
") Semana (parte 1) 9 Semana 8 (parte ) Empecemo! Apreciado participante, neceitamo que tenga una actitud de éxito y dipoición de llegar hata el final, aún en medio de la dificultade, por ello perevera iempre!
Semana (parte 1) 9 Semana 8 (parte ) Empecemo! Apreciado participante, neceitamo que tenga una actitud de éxito y dipoición de llegar hata el final, aún en medio de la dificultade, por ello perevera iempre!
Capítulo 3: Algoritmos Usados por el Generador de Autómatas Finitos Determinísticos
 Capítulo 3: Algoritmo Uado por el Generador de Autómata Finito Determinítico 3.1 Introducción En ete capítulo e preentan lo algoritmo uado por el generador de autómata finito determinítico que irve como
Capítulo 3: Algoritmo Uado por el Generador de Autómata Finito Determinítico 3.1 Introducción En ete capítulo e preentan lo algoritmo uado por el generador de autómata finito determinítico que irve como
Control PID. Sintonización e implementación
 Control PID. Sintonización e implementación Elizabeth Villota Cerna Curso: Ingeniería de Control (MT221) Facultad de Ingeniería Mecánica UNI-FIM Julio 2012 1 Control PID Control PID una de las formas más
Control PID. Sintonización e implementación Elizabeth Villota Cerna Curso: Ingeniería de Control (MT221) Facultad de Ingeniería Mecánica UNI-FIM Julio 2012 1 Control PID Control PID una de las formas más
Solución de las actividades de Ondas, luz y sonido
 Solución de la actividade de Onda, luz y onido 1. La imagen muetra una cuerda por donde viaja una onda: Teniendo en cuenta la ecala que e indica en el dibujo: a. Mide la amplitud de la ocilación. La amplitud
Solución de la actividade de Onda, luz y onido 1. La imagen muetra una cuerda por donde viaja una onda: Teniendo en cuenta la ecala que e indica en el dibujo: a. Mide la amplitud de la ocilación. La amplitud