Interfaz virtual para rehabilitación de mano (muñeca y dedos) con el uso de un dispositivo háptico.
|
|
|
- Héctor Giménez Chávez
- hace 7 años
- Vistas:
Transcripción
1 Autor: Ing. Téllez Rodríguez Gloria Irene Asesor:MC Briseño Cerón Abraham MC Dora A. Rodriguez Vega MC Ismaylia Saucedo Ugalde 1
2 Situación Actual En México se pueden observar diferentes tipos de discapacidades como son, auditivas, del habla, de movimiento, mentales entre otras. A través de los censos del INEGI, en el año 2010 más de 6 millones de habitantes en la república mexicana presenta alguna discapacidad. Estas discapacidades pueden ser provocadas por problemas de nacimiento, de salud o accidentes. 2
3 Propuesta Desarrollar una plataforma experimental para diagnóstico y rehabilitación de personas con discapacidad motriz en mano, mediante protocolos de escritura, audio y visuales. 3
4 Objetivo General Generar una interfaz virtual que sirva para la rehabilitación de personas con discapacidad en miembro superior mediante la aportación de una plantilla para escritura y valoración, incluyendo texturas o fondos para percepción a través del dispositivo robótico para la interacción humanorobot. 4
5 Objetivos Específicos Para lograr el objetivo general es necesario realizar lo siguiente: Obtener modelos de los movimientos de personas sanas y discapacitadas. Definir y validar la plantilla Implementar y validar texturas en los objetos Generar interfaz hombre-máquina para seguimiento y valoración de datos para texturas y entornos virtuales. Generar reporte visual de resultados. Planificar y desarrollar la interfaz gráfica virtual. 5
6 Metodología Contar con los modelos de los movimientos de la persona sana y de la persona con discapacidad Contar con el modelo del o los dispositivos robóticos que asisten al paciente Acoplar el modelo de la persona sana al modelo del robot Planificar la tarea virtual o actividad en el entorno virtual a realizar para rehabilitación Generar mecanismos de control que asisten en el guiado háptico en la interfaz virtual-máquina operador (paciente). 6
7 Biomecánica mano 7
8 Dispositivo Háptico: Phantom omni 8


9 Estudio persona sana 9
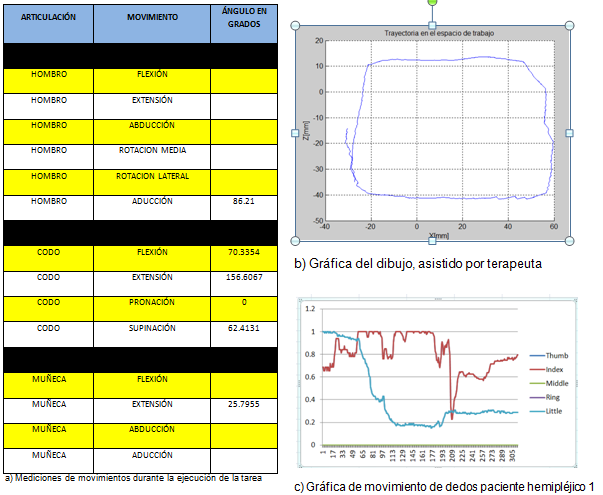
10 ARTICULACIÓN MOVIMIENTO ÁNGULO EN GRADOS HOMBRO FLEXIÓN HOMBRO EXTENSIÓN HOMBRO ABDUCCIÓN HOMBRO ADUCCIÓN HOMBRO ROTACIÓN MEDIA HOMBRO ROTACIÓN LATERAL CODO FLEXIÓN CODO EXTENSIÓN CODO PRONACIÓN CODO SUPINACIÓN 0 10 MUÑECA FLEXIÓN MUÑECA EXTENSIÓN MUÑECA ABDUCCIÓN MUÑECA ADUCCIÓN

11 Estudio persona con discapacidad 11
12 ARTICULACIÓN MOVIMIENTO ÁNGULO EN GRADOS HOMBRO HOMBRO HOMBRO HOMBRO HOMBRO FLEXIÓN EXTENSIÓN ABDUCCIÓN ADUCCIÓN ROTACIÓN MEDIA HOMBRO ROTACIÓN LATERAL CODO FLEXIÓN CODO EXTENSIÓN CODO PRONACIÓN 0 CODO SUPINACIÓN MUÑECA FLEXIÓN MUÑECA EXTENSIÓN MUÑECA MUÑECA ABDUCCIÓN ADUCCIÓN 12
13 Modelo Phantom 13


14 Información Visual Información Háptica 14
15 Movimientos 15
16 Desarrollo 16
17 Diagrama de Métodos ajustarventana glutreshapefunc cargarmodelos mundo cerrar main vialactea glutdisplayfunc acthaptica cargarsonido mpuntero cargargraficos streamsalida 17
18 IRE 18

19 Diagnóstico 19
20 Rehabilitación auditiva, visual y tacto 20
21 Conclusiones La interfaz háptica permite que el paciente tenga una forma atractiva y divertida para rehabilitarse, estimulando los movimientos mediante el juego, además con la percepción visual mediante los objetos virtuales y el tacto mediante la sensación de las texturas vistas a través del dispositivo robótico. 21
22 Trabajos futuros 22
23 Trabajos futuros 23
24 Referencias Bien, Z. Z., & Stefanov, D. (2004). Advances in Rehabilitation Robotics. New York: Springer Verlag. Briseño, A., Dominguez, O., & Saucedo, I. (2012). El Uso de captura de movimiento corporal para el análisis de discapacidades en miembros superior o inferior: Caso de uso Hemipléjia. INEGI. (2010). Discapacidad en México. México. Jarillo Silva, A., Domínguez Ramírez, O., Parra Vega, V., & Ordaz Oliver, J. (2009). Cinemática y manipulabilidad del dispositivo háptico PHANToM OMNI. México. Johnson, M. J. (2006). Recent trends in robot-assisted therapy environments to improve real-life functional performance after stroke. Journal of NeuroEngineering and Rehabilitation, 1-6. Li, X., Wang, J., Fang, X., & Ji, W. (2011). The Study of Virtual Simulation for 5dof Upper-limb Rehabilitation Robot. 3rd International Conf erence on Advanced Computer Control (lcacc 2011). Pinto Salamanca, M. L. (30 de Julio de 2009). Análisis e Implementacion de una Interfaz Háptica en Entornos Virtuales. Bogotá. Shuxiang, G., & Zhibin, S. (2008). VR-based a Novel Active Rehabilitation System for Upper Limbs. Proceedings of 2008 IEEE International Conference on Mechatronics and Automation. 24
25 Gracias por su atención Universidad Politécnica de Sinaloa Carretera a Higueras Km. 3, C.P Mazatlán, Sinaloa, México. 25 Mexia Barraza Omar Salas Castro Julio Andrés julio_shock@hotmail.com Gloria Irene Téllez Rodríguez gtellez@upsin.edu.mx Rosa Karina González Trigueros rgonzalez@upsin.edu.mx Abraham Briseño Cerón abriseno@upsin.edu.mx
INTERFAZ HÁPTICA TELEOPERADA PARA REHABILITACIÓN PEDIÁTRICA
 Memorias del XV Congreso Mexicano de Robótica 2014 Universidad Autonoma de Sinaloa XVI COMRob 2014, ISBN: En trámite 6 8 de Noviembre, 2014, Mazatlán, Sinaloa, México XVI COMRob2014/ID-042 INTERFAZ HÁPTICA
Memorias del XV Congreso Mexicano de Robótica 2014 Universidad Autonoma de Sinaloa XVI COMRob 2014, ISBN: En trámite 6 8 de Noviembre, 2014, Mazatlán, Sinaloa, México XVI COMRob2014/ID-042 INTERFAZ HÁPTICA
El uso de captura de movimiento corporal para el análisis de discapacidades en miembros superior o inferior: Caso de uso: hemiplejia
 El uso de captura de movimiento corporal para el análisis de discapacidades en miembros superior o inferior: Caso de uso: hemiplejia Abraham Briseño Cerón, Universidad Politécnica de Sinaloa, Sinaloa,
El uso de captura de movimiento corporal para el análisis de discapacidades en miembros superior o inferior: Caso de uso: hemiplejia Abraham Briseño Cerón, Universidad Politécnica de Sinaloa, Sinaloa,
SÍNTESIS Y DISEÑO DE UN SISTEMA MECATRÓNICO PARA LA REHABILITACIÓN MOTRIZ EN LA ARTICULACIÓN TIBIOTARSIANA
 SÍNTESIS Y DISEÑO DE UN SISTEMA MECATRÓNICO PARA LA REHABILITACIÓN MOTRIZ EN LA ARTICULACIÓN TIBIOTARSIANA J. A. Ordaz-Rivera a, E. Jimenez-Dominguez a, M. García-Juárez a, G. J. Lozano -Perera a L. M.
SÍNTESIS Y DISEÑO DE UN SISTEMA MECATRÓNICO PARA LA REHABILITACIÓN MOTRIZ EN LA ARTICULACIÓN TIBIOTARSIANA J. A. Ordaz-Rivera a, E. Jimenez-Dominguez a, M. García-Juárez a, G. J. Lozano -Perera a L. M.
DISEÑO E IMPLEMENTACIÓN DE UN BRAZO ROBOT PARA DISCAPACITADOS
 TRABAJO FIN DE GRADO EN INGENIERÍA EN TECNOLOGÍAS INDUSTRIALES DISEÑO E IMPLEMENTACIÓN DE UN BRAZO ROBOT PARA DISCAPACITADOS AUTOR: JAVIER MARTÍNEZ BEA TUTOR: RANKO ZOTOVIC STANISIC Curso Académico: 2015-16
TRABAJO FIN DE GRADO EN INGENIERÍA EN TECNOLOGÍAS INDUSTRIALES DISEÑO E IMPLEMENTACIÓN DE UN BRAZO ROBOT PARA DISCAPACITADOS AUTOR: JAVIER MARTÍNEZ BEA TUTOR: RANKO ZOTOVIC STANISIC Curso Académico: 2015-16
Neurorehabilitación Robótica Basada en Guiado Kinestésico Local para Miembro Superior con Movimiento Involuntario
 Neurorehabilitación Robótica Basada en Guiado Kinestésico Local para Miembro Superior con Movimiento Involuntario 1 OMAR ARTURO DOMÍNGUEZ RAMÍREZ, 2 ALEJANDRO JARILLO SILVA, 3 VICENTE PARRA VEGA Y FRANCISCO,
Neurorehabilitación Robótica Basada en Guiado Kinestésico Local para Miembro Superior con Movimiento Involuntario 1 OMAR ARTURO DOMÍNGUEZ RAMÍREZ, 2 ALEJANDRO JARILLO SILVA, 3 VICENTE PARRA VEGA Y FRANCISCO,
Análisis y diseño de un prototipo virtual de tipo exoesqueleto para rehabilitación de codo
 V COMROB 213, FACULTAD DE ELECTROMECÁNICA, UNIVERSIDAD DE COLIMA, MANZANILLO, COLIMA, 1-4 OCTUBRE 213 1 Análisis y diseño de un prototipo virtual de tipo exoesqueleto para rehabilitación de codo Mauro
V COMROB 213, FACULTAD DE ELECTROMECÁNICA, UNIVERSIDAD DE COLIMA, MANZANILLO, COLIMA, 1-4 OCTUBRE 213 1 Análisis y diseño de un prototipo virtual de tipo exoesqueleto para rehabilitación de codo Mauro
Consejo Estatal de Ciencia y Tecnología del Estado de Sinaloa. Formato de Registro del Sistema Sinaloense de Investigadores y Tecnólogos
 Formato de Registro del Sistema Sinaloense de Investigadores y Tecnólogos I. Generales Nombre: Briseño Cerón Abraham Clave de registro: 1ffdsqqn Fecha de nacimiento: 12/12/1976 Correo electrónico: abriseno@upsin.edu.mx
Formato de Registro del Sistema Sinaloense de Investigadores y Tecnólogos I. Generales Nombre: Briseño Cerón Abraham Clave de registro: 1ffdsqqn Fecha de nacimiento: 12/12/1976 Correo electrónico: abriseno@upsin.edu.mx
Análisis y diseño de un robot de tipo exoesqueleto para rehabilitación de antebrazo y muñeca.
 V COMROB 213, FACULTAD DE ELECTROMECÁNICA, UNIVERSIDAD DE COLIMA, MANANILLO, COLIMA, 1-4 OCTUBRE 213 1 Análisis y diseño de un robot de tipo exoesqueleto para rehabilitación de antebrazo y muñeca. Marcos
V COMROB 213, FACULTAD DE ELECTROMECÁNICA, UNIVERSIDAD DE COLIMA, MANANILLO, COLIMA, 1-4 OCTUBRE 213 1 Análisis y diseño de un robot de tipo exoesqueleto para rehabilitación de antebrazo y muñeca. Marcos
Factores de riesgo de las posturas forzadas
 Factores de riesgo de las posturas forzadas Frecuencia de movimientos Realizar continuamente movimientos de alguna parte del cuerpo hasta una posición forzada incrementa el nivel de riesgo. A mayor frecuencia,
Factores de riesgo de las posturas forzadas Frecuencia de movimientos Realizar continuamente movimientos de alguna parte del cuerpo hasta una posición forzada incrementa el nivel de riesgo. A mayor frecuencia,
MC. Ismaylia Saucedo Ugalde, Profesor Investigador en Informática en la Universidad Politécnica de Sinaloa,
 Modelado y animación mediante captura de trayectorias con el uso de un body motion capture MC. Dora Aydee Rodríguez Vega 1, MC. Abraham Briseño Cerón 2, MC. Ismaylia Saucedo Ugalde 3 y Dr. Víctor Núñez
Modelado y animación mediante captura de trayectorias con el uso de un body motion capture MC. Dora Aydee Rodríguez Vega 1, MC. Abraham Briseño Cerón 2, MC. Ismaylia Saucedo Ugalde 3 y Dr. Víctor Núñez
SIMULADOR DE COMPORTAMIENTO CINEMÁTICO DE ROBOTS MANIPULADORES UTILIZANDO MATLAB
 SIMULADOR DE COMPORTAMIENTO CINEMÁTICO DE ROBOTS MANIPULADORES UTILIZANDO MATLAB Enrique Cuan Duron a, Arnoldo Fernández Ramírez b, Elisa Urquizo Barraza a, Roxana García Andrade b,a División de Estudios
SIMULADOR DE COMPORTAMIENTO CINEMÁTICO DE ROBOTS MANIPULADORES UTILIZANDO MATLAB Enrique Cuan Duron a, Arnoldo Fernández Ramírez b, Elisa Urquizo Barraza a, Roxana García Andrade b,a División de Estudios
LABORATORIO DE BIOMECÁNICA. Ciencia en Movimiento
 LABORATORIO DE BIOMECÁNICA ANÁLISIS DE MARCHA ANÁLISIS BIOMECÁNICO SOLUCIONES SOFTWARE EN CAPTURA Y ANÁLISIS DE MOVIMIENTO: BIKE FIT ANIMACIÓN 3D Y REALIDAD VIRTUAL RUNNING ANÁLISIS DE MARCHA El Módulo
LABORATORIO DE BIOMECÁNICA ANÁLISIS DE MARCHA ANÁLISIS BIOMECÁNICO SOLUCIONES SOFTWARE EN CAPTURA Y ANÁLISIS DE MOVIMIENTO: BIKE FIT ANIMACIÓN 3D Y REALIDAD VIRTUAL RUNNING ANÁLISIS DE MARCHA El Módulo
Tecnología, Conocimiento y Sociedad
 Revista Internacional de Tecnología, Conocimiento y Sociedad TECNOYSOC.COM EDITORES Roberto Feltrero Karim Gherab-Martin CONSEJO EDITORIAL Mario Biagioli Javier Echeverría Roberto Feltrero Karim Gherab-Martín
Revista Internacional de Tecnología, Conocimiento y Sociedad TECNOYSOC.COM EDITORES Roberto Feltrero Karim Gherab-Martin CONSEJO EDITORIAL Mario Biagioli Javier Echeverría Roberto Feltrero Karim Gherab-Martín
Tema 5- INTRODUCCIÓN A LA BIOMECÁNICA OCUPACIONAL
 Tema 5 INTRODUCCIÓN A LA BIOMECÁNICA OCUPACIONAL Trastornos musculoesqueléticos Qué es la biomecánica? Biomecánica ocupacional Lesiones musculoesqueléticos Factores de riesgo asociados Manipulación manual
Tema 5 INTRODUCCIÓN A LA BIOMECÁNICA OCUPACIONAL Trastornos musculoesqueléticos Qué es la biomecánica? Biomecánica ocupacional Lesiones musculoesqueléticos Factores de riesgo asociados Manipulación manual
Actualidad en la investigación sobre tecnología en los hogares para la vida independiente. Roberto Casas San Sebastián, 17/11/2008
 Actualidad en la investigación sobre tecnología en los hogares para la vida independiente Roberto Casas San Sebastián, 17/11/2008 Presentación El Grupo de Investigación Tecnodiscap está ubicado en el Centro
Actualidad en la investigación sobre tecnología en los hogares para la vida independiente Roberto Casas San Sebastián, 17/11/2008 Presentación El Grupo de Investigación Tecnodiscap está ubicado en el Centro
SISTEMA ARTICULAR. Tipos de movimientos articulares Movimientos compuestos Características de las articulaciones más importantes
 SISTEMA ARTICULAR. Tipos de movimientos articulares Movimientos compuestos Características de las articulaciones más importantes Tipos de Movimientos Flexión y Extensión Aducción y Abducción Rotación Circunducción
SISTEMA ARTICULAR. Tipos de movimientos articulares Movimientos compuestos Características de las articulaciones más importantes Tipos de Movimientos Flexión y Extensión Aducción y Abducción Rotación Circunducción
Desarrollo de un brazo mecánico articulado electroneumático
 Universidad Autónoma de Madrid Escuela Politécnica Superior HCTLab (C-115) Desarrollo de un brazo mecánico articulado electroneumático Anteproyecto Javier Del Sol Rodríguez Tutor: Fernando López Colino
Universidad Autónoma de Madrid Escuela Politécnica Superior HCTLab (C-115) Desarrollo de un brazo mecánico articulado electroneumático Anteproyecto Javier Del Sol Rodríguez Tutor: Fernando López Colino
 0606 O R T E S I S D E M I E M B R O S U P E R I O R 48 0606 03 ORTESIS DE DEDO 0606 03 03 Férula pasiva en termoplástico para inmovilización de dedo. 12,02 12,02 No renovable 0606 03 06 Férula en termoplástico
0606 O R T E S I S D E M I E M B R O S U P E R I O R 48 0606 03 ORTESIS DE DEDO 0606 03 03 Férula pasiva en termoplástico para inmovilización de dedo. 12,02 12,02 No renovable 0606 03 06 Férula en termoplástico
INGENIERÍA EN INFORMÁTICA
 INF 1-1 CC2 MAC CC1 CC2 CC2 CC2 MAC CC1 CC2 CC2 CC1 CC1 MAC CC1 CC2 CC1 CC1 MAC CC1 CC2 Redes SOFTWARE AULA 3 AULA 308 CC2 Redes SOFTWARE AULA 3 Redes CC1 M.C. Patricia Guadalupe Torrero Martínez Ing.
INF 1-1 CC2 MAC CC1 CC2 CC2 CC2 MAC CC1 CC2 CC2 CC1 CC1 MAC CC1 CC2 CC1 CC1 MAC CC1 CC2 Redes SOFTWARE AULA 3 AULA 308 CC2 Redes SOFTWARE AULA 3 Redes CC1 M.C. Patricia Guadalupe Torrero Martínez Ing.
240AR057 - Interacción Humano- Robot y Teleoperación
 Unidad responsable: 240 - ETSEIB - Escuela Técnica Superior de Ingeniería Industrial de Barcelona Unidad que imparte: 707 - ESAII - Departamento de Ingeniería de Sistemas, Automática e Informática Industrial
Unidad responsable: 240 - ETSEIB - Escuela Técnica Superior de Ingeniería Industrial de Barcelona Unidad que imparte: 707 - ESAII - Departamento de Ingeniería de Sistemas, Automática e Informática Industrial
Clinical 3D Motion Analyser: Análisis biomecánico 3D en tiempo real
 Clinical 3D Motion Analyser: Análisis biomecánico 3D en tiempo real ESTUDIOS CINEMÁTICOS Y DINÁMICOS DE CUERPO COMPLETO PARA ANÁLISIS CLÍNICO, VALORACIÓN DEL DAÑO CORPORAL, DEPORTES, ESTUDIOS DE ERGONOMÍA
Clinical 3D Motion Analyser: Análisis biomecánico 3D en tiempo real ESTUDIOS CINEMÁTICOS Y DINÁMICOS DE CUERPO COMPLETO PARA ANÁLISIS CLÍNICO, VALORACIÓN DEL DAÑO CORPORAL, DEPORTES, ESTUDIOS DE ERGONOMÍA
Dept. de Proyectos de Ingeniería
 ANEXO 3 : REFERENCIAS Como para el estudio de los movimientos se tiene la necesidad de localizar las fuerzas a lo largo de una línea, en un plano o en el espacio, es imprescindible tener una referencia.
ANEXO 3 : REFERENCIAS Como para el estudio de los movimientos se tiene la necesidad de localizar las fuerzas a lo largo de una línea, en un plano o en el espacio, es imprescindible tener una referencia.
PROTOCOLO DE INVESTIGACIÓN DE ENFERMEDADES PROFESIONALES
 PROTOCOLO DE INVESTIGACIÓN DE ENFERMEDADES PROFESIONALES Servicio de Higiene Industrial y Salud Laboral Empresa:... Trabajador: Investigación de enfermedades profesionales La investigación de las enfermedades
PROTOCOLO DE INVESTIGACIÓN DE ENFERMEDADES PROFESIONALES Servicio de Higiene Industrial y Salud Laboral Empresa:... Trabajador: Investigación de enfermedades profesionales La investigación de las enfermedades
ANÁLISIS 3D DE MOVIMIENTO
 Your logo here ANÁLISIS 3D DE MOVIMIENTO HELEN HAYES TREN INFERIOR CON CALIBRACION Nombre y apellidos Marcha, Test Fecha de nacimiento 1752-09-14 Fecha de generación del informe 16-3-2016, 15:28:21 Patología
Your logo here ANÁLISIS 3D DE MOVIMIENTO HELEN HAYES TREN INFERIOR CON CALIBRACION Nombre y apellidos Marcha, Test Fecha de nacimiento 1752-09-14 Fecha de generación del informe 16-3-2016, 15:28:21 Patología
DPE-RG-14 Horario de Grupo_rev 02. Tipo de documento: Registro HORARIO DE GRUPO. Emisión: 2015 08 28. Ingeniería en Informática
 Código: DPE RG 14 Emisión: 2015 08 28 Revisión: 02 Dayani Verenice Vega Anaya INF21 LUNES MARTES MIÉRCOLES JUEVES VIERNES SOFTWARE 9:30 a 10:00 R E C E S O SOFTWARE 15:00 a 15:30 R E C E S O Cálculo Diferencial
Código: DPE RG 14 Emisión: 2015 08 28 Revisión: 02 Dayani Verenice Vega Anaya INF21 LUNES MARTES MIÉRCOLES JUEVES VIERNES SOFTWARE 9:30 a 10:00 R E C E S O SOFTWARE 15:00 a 15:30 R E C E S O Cálculo Diferencial
ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL Guayaquil - Ecuador
 ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL Guayaquil - Ecuador Descripción del problema Objetivos Análisis, Diseño e Implementación Instalación del Prototipo en FASINARM Pruebas Resultados de las pruebas
ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL Guayaquil - Ecuador Descripción del problema Objetivos Análisis, Diseño e Implementación Instalación del Prototipo en FASINARM Pruebas Resultados de las pruebas
UNIVERSIDAD AUTÓNOMA DE CHIAPAS LICENCIATURA EN SISTEMAS COMPUTACIONALES
 UNIVERSIDAD AUTÓNOMA DE CHIAPAS LICENCIATURA EN SISTEMAS COMPUTACIONALES Área de formación: Disciplinaria Unidad académica: Interacción Humano-Computadora Ubicación: Octavo Semestre Clave: 2100 Horas semana-mes:
UNIVERSIDAD AUTÓNOMA DE CHIAPAS LICENCIATURA EN SISTEMAS COMPUTACIONALES Área de formación: Disciplinaria Unidad académica: Interacción Humano-Computadora Ubicación: Octavo Semestre Clave: 2100 Horas semana-mes:
Dra. Carmen J. Alba Gelabert CNR Julio Díaz 2005
 Dra. Carmen J. Alba Gelabert CNR Julio Díaz 2005 OBJETIVOS Prevención de complicaciones o discapacidades secundarias. 2- Apoyo psicológico al paciente. 3- Iniciar ejercicios para la independización de
Dra. Carmen J. Alba Gelabert CNR Julio Díaz 2005 OBJETIVOS Prevención de complicaciones o discapacidades secundarias. 2- Apoyo psicológico al paciente. 3- Iniciar ejercicios para la independización de
8º CONGRESO IBEROAMERICANO DE INGENIERIA MECANICA Cusco, 23 al 25 de Octubre de 2007
 8º CONGRESO IBEROAMERICANO DE INGENIERIA MECANICA Cusco, 23 al 25 de Octubre de 2007 EXOESQUELETO MECATRÓNICO PARA REHABILITACIÓN MOTORA R. GUTIERREZ*, P. A. NIÑO- SUAREZ,* O. F. AVILES -SANCHEZ*, F. VANEGAS*,
8º CONGRESO IBEROAMERICANO DE INGENIERIA MECANICA Cusco, 23 al 25 de Octubre de 2007 EXOESQUELETO MECATRÓNICO PARA REHABILITACIÓN MOTORA R. GUTIERREZ*, P. A. NIÑO- SUAREZ,* O. F. AVILES -SANCHEZ*, F. VANEGAS*,
Factores de riesgo del trabajo repetitivo
 Factores de riesgo del trabajo repetitivo Los factores de riesgo son aquellas condiciones de trabajo o exigencias durante la realización de trabajo repetitivo que incrementan la probabilidad de desarrollar
Factores de riesgo del trabajo repetitivo Los factores de riesgo son aquellas condiciones de trabajo o exigencias durante la realización de trabajo repetitivo que incrementan la probabilidad de desarrollar
KINESIOLOGIA DEL CODO
 KINESIOLOGIA DEL CODO 1. Recuerdo Anatómico y fisiológico.- Está compuesta por tres articulaciones que pertenecen a la clase Diartrosis: - Articulación húmerocubital (género trocleartrosis) - Articulación
KINESIOLOGIA DEL CODO 1. Recuerdo Anatómico y fisiológico.- Está compuesta por tres articulaciones que pertenecen a la clase Diartrosis: - Articulación húmerocubital (género trocleartrosis) - Articulación
ión 1 Una ortesis diseñada por un grupo multidisclinar de investigadores consigue reducir el temblor producido por el Parkinson
 ión 1 Nota de Prensa Una ortesis diseñada por un grupo multidisclinar de investigadores consigue reducir el temblor producido por el Parkinson El objetivo del desarrollo es suprimir los temblores de brazo
ión 1 Nota de Prensa Una ortesis diseñada por un grupo multidisclinar de investigadores consigue reducir el temblor producido por el Parkinson El objetivo del desarrollo es suprimir los temblores de brazo
La Robótica en la Ingeniería
 Unidad responsable: Unidad que imparte: Curso: Titulación: Créditos ECTS: 2016 240 - ETSEIB - Escuela Técnica Superior de Ingeniería Industrial de Barcelona 707 - ESAII - Departamento de Ingeniería de
Unidad responsable: Unidad que imparte: Curso: Titulación: Créditos ECTS: 2016 240 - ETSEIB - Escuela Técnica Superior de Ingeniería Industrial de Barcelona 707 - ESAII - Departamento de Ingeniería de
DESARROLLO PORTAFOLIO / CASOS DE ÉXITO
 DESARROLLO PORTAFOLIO / CASOS DE ÉXITO SOMOS INNOVADORA. UNA SOLUCIÓN QUÉ HACEMOS Creamos soluciones integrales que den respuesta a las necesidades individuales de cada uno de nuestros clientes, a través
DESARROLLO PORTAFOLIO / CASOS DE ÉXITO SOMOS INNOVADORA. UNA SOLUCIÓN QUÉ HACEMOS Creamos soluciones integrales que den respuesta a las necesidades individuales de cada uno de nuestros clientes, a través
PROCEDIMIENTO PARA LA IDENTIFICACIÓN, ENTREGA Y CONTROL DE ELEMENTOS Y/O EQUIPOS DE PROTECCIÓN PERSONAL
 PROCEDIMIENTO PARA LA IDENTIFICACIÓN, ENTREGA Y CONTROL DE ELEMENTOS Y/O EQUIPOS DE PROTECCIÓN PERSONAL CÓDIGO: DI-TH-PR-29 VERSIÓN: 01 27-JUN-2016 UNIVERSIDAD DE ANTIOQUIA DIRECCIÓN DE DESARROLLO INSTITUCIONAL
PROCEDIMIENTO PARA LA IDENTIFICACIÓN, ENTREGA Y CONTROL DE ELEMENTOS Y/O EQUIPOS DE PROTECCIÓN PERSONAL CÓDIGO: DI-TH-PR-29 VERSIÓN: 01 27-JUN-2016 UNIVERSIDAD DE ANTIOQUIA DIRECCIÓN DE DESARROLLO INSTITUCIONAL
Cinemática del Robot. UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides
 UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. Se interesa por la
UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. Se interesa por la
Calentamiento en el Golf
 Calentamiento en el Golf Activación vs Desactivación previo a un juego Prof. J Gastón Rodriguez Prado. Temario Activación Neuromuscular en el calentamiento 1)Bases neurofosiológicas de la contracción muscular
Calentamiento en el Golf Activación vs Desactivación previo a un juego Prof. J Gastón Rodriguez Prado. Temario Activación Neuromuscular en el calentamiento 1)Bases neurofosiológicas de la contracción muscular
Introducción a la Biomecánica. Machar Reid Federación Internacional de Tenis
 Introducción a la Biomecánica Machar Reid Federación Internacional de Tenis Aplicación de la Biomecánica al tenis Cinemática: Biomecánica Nos referimos a las características de un golpe que nos permite
Introducción a la Biomecánica Machar Reid Federación Internacional de Tenis Aplicación de la Biomecánica al tenis Cinemática: Biomecánica Nos referimos a las características de un golpe que nos permite
INTERFAZ HAPTICA APLICADA EN LA MANIPULACION DE OBJETOS
 INTERFAZ HAPTICA APLICADA EN LA MANIPULACION DE OBJETOS R. HAARTH 1, G. E. EJARQUE 1, M. DISTEFANO 1 1 Instituto de Automática y Electrónica Industrial. Facultad de Ingeniería. Universidad Nacional de
INTERFAZ HAPTICA APLICADA EN LA MANIPULACION DE OBJETOS R. HAARTH 1, G. E. EJARQUE 1, M. DISTEFANO 1 1 Instituto de Automática y Electrónica Industrial. Facultad de Ingeniería. Universidad Nacional de
Uso de la Realidad Virtual Aumentada para Reconocimiento de Patrones de Diseño como Medida de Seguridad para la Información
 Uso de la Realidad Virtual Aumentada para Reconocimiento de Patrones de Diseño como Medida de Seguridad para la Información Abraham Briseño Cerón 1, Ismaylia Saucedo Ugalde 1, y Luis A. Suárez Conde 1,
Uso de la Realidad Virtual Aumentada para Reconocimiento de Patrones de Diseño como Medida de Seguridad para la Información Abraham Briseño Cerón 1, Ismaylia Saucedo Ugalde 1, y Luis A. Suárez Conde 1,
ANÁLISIS DE MARCHA 3D
 ANÁLISIS DE MARCHA 3D HELEN HAYES TREN INFERIOR Nombre y apellidos JUAN SEBASTIAN PEREZ Fecha de nacimiento 2008-07-07 Fecha de generación del informe 8-3-2016, 10:58:37 Patología Notas Informe de análisis
ANÁLISIS DE MARCHA 3D HELEN HAYES TREN INFERIOR Nombre y apellidos JUAN SEBASTIAN PEREZ Fecha de nacimiento 2008-07-07 Fecha de generación del informe 8-3-2016, 10:58:37 Patología Notas Informe de análisis
DIPLOMADO EN ERGONOMÍA
 UNIVERSIDAD AUTÓNOMA DE BAJA CALIFORNIA 2016 DIPLOMADO EN ERGONOMÍA CON OPCIÓN A CERTIFICACIÓN PEC * Una vez obtenido el DIPLOMA que otorga la UABC, los participantes tienen la opción de continuar con
UNIVERSIDAD AUTÓNOMA DE BAJA CALIFORNIA 2016 DIPLOMADO EN ERGONOMÍA CON OPCIÓN A CERTIFICACIÓN PEC * Una vez obtenido el DIPLOMA que otorga la UABC, los participantes tienen la opción de continuar con
INTERACCIÓN PERSONA-ORDENADOR
 INTERACCIÓN PERSONA-ORDENADOR Dispositivos hápticos y de realimentación de fuerza. Realizador por: Rodrigo Medrano Calderón q080002 1 Índice de contenidos. 1. Introducción. Nombre genérico y nombre comercial.3
INTERACCIÓN PERSONA-ORDENADOR Dispositivos hápticos y de realimentación de fuerza. Realizador por: Rodrigo Medrano Calderón q080002 1 Índice de contenidos. 1. Introducción. Nombre genérico y nombre comercial.3
Durante la clase Responder lo siguiente:
 Durante la clase Responder lo siguiente: Identificar: - Partes y sentidos del cuerpo involucrados en el uso del objeto. - Cuáles son las medidas críticas que determinan las zonas de interacción del objeto?.
Durante la clase Responder lo siguiente: Identificar: - Partes y sentidos del cuerpo involucrados en el uso del objeto. - Cuáles son las medidas críticas que determinan las zonas de interacción del objeto?.
Programa de 10 ejercicios para lanzadores
 Programa de 10 ejercicios para lanzadores El programa de 10 ejercicios para lanzadores fue diseñado para ejercitar la mayor cantidad de músculos necesarios para el lanzamiento. La meta de este protocolo
Programa de 10 ejercicios para lanzadores El programa de 10 ejercicios para lanzadores fue diseñado para ejercitar la mayor cantidad de músculos necesarios para el lanzamiento. La meta de este protocolo
Dr. Marcotulio Pérez Valtierra Ced. Prof Ced. Esp
 HOJA 1 de 7 MANO - 1 Rango de Movimiento Pasivo: Articulación IFD de los Dedos MANO - 2 Rango de Movimiento Pasivo: Articulación IFP de los Dedos Doble pasivamente la punta del (los) dedo (s) de la mano
HOJA 1 de 7 MANO - 1 Rango de Movimiento Pasivo: Articulación IFD de los Dedos MANO - 2 Rango de Movimiento Pasivo: Articulación IFP de los Dedos Doble pasivamente la punta del (los) dedo (s) de la mano
C. Gerardo Bernabel Rodríguez Ingeniería Mecánica (Especialidad en Diseño) Instituto Tecnológico de Celaya
 Instituto Tecnológico de Celaya") ANÁLISIS BIOMECÁNICO DEL ANTEBRAZO Presentado por C. Gerardo Bernabel Rodríguez Ingeniería Mecánica (Especialidad en Diseño) Instituto Tecnológico de Celaya james_molder@todito.com M. en I. Raúl Lesso
ANÁLISIS BIOMECÁNICO DEL ANTEBRAZO Presentado por C. Gerardo Bernabel Rodríguez Ingeniería Mecánica (Especialidad en Diseño) Instituto Tecnológico de Celaya james_molder@todito.com M. en I. Raúl Lesso
Red Iberoamericana REASISTE Iberdiscap Noviembre 21, 2017
 Red Iberoamericana REASISTE Iberdiscap 2017 Noviembre 21, 2017 TENDENCIAS EN EL DISEÑO DE EXOESQUELETOS Introducción Clasificación de exoesqueletos Funcionalidades de acuerdo al tipo de exo-esqueletos
Red Iberoamericana REASISTE Iberdiscap 2017 Noviembre 21, 2017 TENDENCIAS EN EL DISEÑO DE EXOESQUELETOS Introducción Clasificación de exoesqueletos Funcionalidades de acuerdo al tipo de exo-esqueletos
MIEMBRO SUPERIOR ANATOMÍA
 MIEMBRO SUPERIOR ANATOMÍA HÚMERO Diáfisis (cuerpo)- cara externa (presenta V deltoidea) -cara interna -cara posterior (presenta el canal de torsión, por donde pasan vasos y nervios) - Epífisis superior:
MIEMBRO SUPERIOR ANATOMÍA HÚMERO Diáfisis (cuerpo)- cara externa (presenta V deltoidea) -cara interna -cara posterior (presenta el canal de torsión, por donde pasan vasos y nervios) - Epífisis superior:
Resumen. Abstract. 1. Introducción
 Seguimiento y Análisis del Movimiento de las Extremidades Superiores Aplicado a la Rehabilitación Física de un Paciente Usando Técnicas de Visión Artificial Ma. Paz Velarde, Erika Perugachi, Boris X. Vintimilla,
Seguimiento y Análisis del Movimiento de las Extremidades Superiores Aplicado a la Rehabilitación Física de un Paciente Usando Técnicas de Visión Artificial Ma. Paz Velarde, Erika Perugachi, Boris X. Vintimilla,
PLAN DE ESTUDIOS 2008-II SÍLABO
 UNIVERSIDAD RICARDO PALMA FACULTAD DE INGENIERÍA I. INFORMACIÓN GENERAL: DEPARTAMENTO ACADÉMICO DE INGENIERÍA PLAN DE ESTUDIOS 2008-II SÍLABO 1.1 Asignatura : ROBÓTICA 1.2. Ciclo : VIII 1.3 Carrera Profesional
UNIVERSIDAD RICARDO PALMA FACULTAD DE INGENIERÍA I. INFORMACIÓN GENERAL: DEPARTAMENTO ACADÉMICO DE INGENIERÍA PLAN DE ESTUDIOS 2008-II SÍLABO 1.1 Asignatura : ROBÓTICA 1.2. Ciclo : VIII 1.3 Carrera Profesional
Maniobra de estiramiento del miembro superior
 Curso INTERVENCIÓN EN TERAPIA OCUPACIONAL DE LA EXTREMIDAD SUPERIOR NEUROLÓGICA Módulo 5: Concepto Le Métayer Maniobra de estiramiento del miembro superior Objetivos y método de trabajo Saber realizar
Curso INTERVENCIÓN EN TERAPIA OCUPACIONAL DE LA EXTREMIDAD SUPERIOR NEUROLÓGICA Módulo 5: Concepto Le Métayer Maniobra de estiramiento del miembro superior Objetivos y método de trabajo Saber realizar
UNE EN [OCRA]
![UNE EN [OCRA]](/thumbs/65/52926753.jpg "UNE EN [OCRA]") INFORME IDENTIFICACIÓN Archivo Fecha Tarea Empresa Observaciones ergo_casos.erg 20/05/2009 Máquina de producción de componentes mecánicos xx xx Rotación entre 2 puestos de trabajo de la maquinaria diferentes
INFORME IDENTIFICACIÓN Archivo Fecha Tarea Empresa Observaciones ergo_casos.erg 20/05/2009 Máquina de producción de componentes mecánicos xx xx Rotación entre 2 puestos de trabajo de la maquinaria diferentes
DESARROLLO COGNITIVO Y MOTOR INFANTIL SERVICIOS SOCIOCULTURALES/ OCIO
 DESARROLLO COGNITIVO Y MOTOR INFANTIL SERVICIOS SOCIOCULTURALES/ OCIO Objetivo del Programa Formativo: Desarrollar el proceso cognitivo y motor en las actividades, estrategias y recursos. Temporalización:
DESARROLLO COGNITIVO Y MOTOR INFANTIL SERVICIOS SOCIOCULTURALES/ OCIO Objetivo del Programa Formativo: Desarrollar el proceso cognitivo y motor en las actividades, estrategias y recursos. Temporalización:
PROTOCOLO DE INVESTIGACIÓN DE ENFERMEDADES PROFESIONALES
 PROTOCOLO DE INVESTIGACIÓN DE ENFERMEDADES PROFESIONALES Servicio de Higiene Industrial y Salud Laboral Empresa:... Trabajador: Investigación de enfermedades profesionales La investigación de las enfermedades
PROTOCOLO DE INVESTIGACIÓN DE ENFERMEDADES PROFESIONALES Servicio de Higiene Industrial y Salud Laboral Empresa:... Trabajador: Investigación de enfermedades profesionales La investigación de las enfermedades
Cinemática del Robot. CI-2657 Robótica M.Sc. Kryscia Ramírez Benavides
 M.Sc. Kryscia Ramírez Benavides Sistema Robótico Cinemática Dinámica Planeamiento de Tareas Software Hardware Diseño Mecánico Actuadores Sistema de Control Sensores 2 Introducción Con el fin de controlar
M.Sc. Kryscia Ramírez Benavides Sistema Robótico Cinemática Dinámica Planeamiento de Tareas Software Hardware Diseño Mecánico Actuadores Sistema de Control Sensores 2 Introducción Con el fin de controlar
PRESENTACIÓN DEL CURSO:
 PRESENTACIÓN DEL CURSO: El método Tubía de rehabilitación del movimiento es el resultado de 23 años de investigación de la influencia del ritmo musical y la rítmica corporal, en la rehabilitación de funciones
PRESENTACIÓN DEL CURSO: El método Tubía de rehabilitación del movimiento es el resultado de 23 años de investigación de la influencia del ritmo musical y la rítmica corporal, en la rehabilitación de funciones
3.1 Calcule la cinemática del brazo no planar 3R mostrado en la siguiente figura:
 EJERCICIOS UNIDAD 3 3.1 Calcule la cinemática del brazo no planar 3R mostrado en la siguiente figura: Figura. Robot Manipulador no planar 3R 3.2 Imagine un brazo como el PUMA 560, excepto que se remplace
EJERCICIOS UNIDAD 3 3.1 Calcule la cinemática del brazo no planar 3R mostrado en la siguiente figura: Figura. Robot Manipulador no planar 3R 3.2 Imagine un brazo como el PUMA 560, excepto que se remplace
ACTUALIZACIÓN EN PODOLOGIA INFANTIL. 1ª Edición. TALLER DE EXPLORACIÓN Y CASOS CLÍNICOS
 ACTUALIZACIÓN EN PODOLOGIA INFANTIL. 1ª Edición. TALLER DE EXPLORACIÓN Y CASOS CLÍNICOS INTRODUCCIÓN El paciente infantil es un tipo de paciente que acude regularmente a nuestras consultas. Por lo que
ACTUALIZACIÓN EN PODOLOGIA INFANTIL. 1ª Edición. TALLER DE EXPLORACIÓN Y CASOS CLÍNICOS INTRODUCCIÓN El paciente infantil es un tipo de paciente que acude regularmente a nuestras consultas. Por lo que
Programa de la ITF para la Formación de Entrenadores. Biomecánica del. tenis: Conceptos y aplicaciones. Miguel Crespo Responsable de Investigación ITF
 Programa de la ITF para la Formación de Entrenadores Biomecánica del Miguel Crespo Responsable de Investigación ITF tenis: Conceptos y aplicaciones Biomecánica Definición Ciencia que estudia la adaptación
Programa de la ITF para la Formación de Entrenadores Biomecánica del Miguel Crespo Responsable de Investigación ITF tenis: Conceptos y aplicaciones Biomecánica Definición Ciencia que estudia la adaptación
Trabajo de dispositivos de interacción: Dispositivos hápticos y de realimentación de fuerza (Phantom)
") Trabajo de dispositivos de interacción: Dispositivos hápticos y de realimentación de fuerza (Phantom) NOMBRE Y APELLIDO: MATRICULA: DNI: OBAIB EL MAALLEM R090235 Y0531153-M Introducción: Para interactuar
Trabajo de dispositivos de interacción: Dispositivos hápticos y de realimentación de fuerza (Phantom) NOMBRE Y APELLIDO: MATRICULA: DNI: OBAIB EL MAALLEM R090235 Y0531153-M Introducción: Para interactuar
Andrés Ramírez, Anselmo Frizera, Teodiano Freire Universidade Federal do Espírito Santo Vitoria, Brasil
 Sistema para Identificar Déficit de Atención Compartida en Niños con Trastorno del Espectro Autista a partir de la Estimación del Foco de Atención Visual por Red de Sensores RGB y RGBd Andrés Ramírez,
Sistema para Identificar Déficit de Atención Compartida en Niños con Trastorno del Espectro Autista a partir de la Estimación del Foco de Atención Visual por Red de Sensores RGB y RGBd Andrés Ramírez,
Reconocimiento visual de ademanes usando MS Kinect - Introducción. Dr. Héctor Avilés Escuela de Invierno de Robótica 2015
 Reconocimiento visual de ademanes usando MS Kinect - Introducción Dr. Héctor Avilés Escuela de Invierno de Robótica 2015 Contenido Motivación Dispositivos de captura Reconocimiento visual de ademanes Resumen
Reconocimiento visual de ademanes usando MS Kinect - Introducción Dr. Héctor Avilés Escuela de Invierno de Robótica 2015 Contenido Motivación Dispositivos de captura Reconocimiento visual de ademanes Resumen
ANÁLISIS CINEMÁTICO DE UN ROBOT TERAPÉUTICO PARA LA REHABILITACIÓN DE MIEMBROS INFERIORES
 2 Revista de la Ingeniería Industrial, Vol. 7, No., 23, 2-3 ISSN 94-263 AcademiaJournals.com ANÁLISIS CINEMÁTICO DE UN ROBOT TERAPÉUTICO PARA LA REHABILITACIÓN DE MIEMBROS INFERIORES César Humberto Guzmán
2 Revista de la Ingeniería Industrial, Vol. 7, No., 23, 2-3 ISSN 94-263 AcademiaJournals.com ANÁLISIS CINEMÁTICO DE UN ROBOT TERAPÉUTICO PARA LA REHABILITACIÓN DE MIEMBROS INFERIORES César Humberto Guzmán
Control Difuso para Sistemas de Interacción Hombre-Robot Fuzzy control for systems of human-robot interaction
 Control Difuso para Sistemas de Interacción Hombre-Robot Fuzzy control for systems of human-robot interaction Miguel A. Hoyos León, Raúl Villafuerte Segura, Omar A. Domínguez Ramírez Universidad Autónoma
Control Difuso para Sistemas de Interacción Hombre-Robot Fuzzy control for systems of human-robot interaction Miguel A. Hoyos León, Raúl Villafuerte Segura, Omar A. Domínguez Ramírez Universidad Autónoma
Aplicaciones biomecánicas
 Aplicaciones biomecánicas El Instituto de Biomecánica (IBV) es un centro tecnológico que estudia el comportamiento del cuerpo humano y su relación con los productos, entornos y servicios que utilizan las
Aplicaciones biomecánicas El Instituto de Biomecánica (IBV) es un centro tecnológico que estudia el comportamiento del cuerpo humano y su relación con los productos, entornos y servicios que utilizan las
PROPUESTA DE EXOESQUELETO PARA REHABILITACIÓN DEL DEDO ÍNDICE. Proposed exoskeleton for rehabilitation of index finger
 First International Conference on Advanced Mechatronics, Design, and Manufacturing Technology - AMDM 2012 1 PROPUESTA DE EXOESQUELETO PARA REHABILITACIÓN DEL DEDO ÍNDICE Proposed exoskeleton for rehabilitation
First International Conference on Advanced Mechatronics, Design, and Manufacturing Technology - AMDM 2012 1 PROPUESTA DE EXOESQUELETO PARA REHABILITACIÓN DEL DEDO ÍNDICE Proposed exoskeleton for rehabilitation
aducción y rotación interna de hombro. flexión de codo. pronación de antebrazo. flexión de muñeca y dedos.
 1 Análisis Dinámico del Gesto Alcanzar y Agarrar un Objeto en Individuos que Sufrieron un ACV. Guido Canalis*, Pablo Dieser*, Santiago Gomez Argüello, Marcos Crespo y Ariel Braidot* *Facultad de ingeniería
1 Análisis Dinámico del Gesto Alcanzar y Agarrar un Objeto en Individuos que Sufrieron un ACV. Guido Canalis*, Pablo Dieser*, Santiago Gomez Argüello, Marcos Crespo y Ariel Braidot* *Facultad de ingeniería
DISPOSITIVO BIOMÉDICO DESTINADO A LA REHABILITACIÓN DE TOBILLO POR MEDIO DE MOVIMIENTO PASIVO
 DISPOSITIVO BIOMÉDICO DESTINADO A LA REHABILITACIÓN DE TOBILLO POR MEDIO DE MOVIMIENTO PASIVO 1 Cerón Gutiérrez Adriana Carolina, 1 Gallegos González Sayra Anahí, 1 Moreno Gómez Diana Laura, 1,2 Marroquín
DISPOSITIVO BIOMÉDICO DESTINADO A LA REHABILITACIÓN DE TOBILLO POR MEDIO DE MOVIMIENTO PASIVO 1 Cerón Gutiérrez Adriana Carolina, 1 Gallegos González Sayra Anahí, 1 Moreno Gómez Diana Laura, 1,2 Marroquín
DESCRIPCIÓN DE LOS EJERCICIOS PARA ARTROSIS DE MANO
 DESCRIPCIÓN DE LOS EJERCICIOS PARA ARTROSIS DE MANO AUTORES José Luis Arana-Echevarría Morales (Terapeuta Ocupacional de la Unidad de Rehabilitación del Hospital Universitario Fundación Alcorcón. Madrid)
DESCRIPCIÓN DE LOS EJERCICIOS PARA ARTROSIS DE MANO AUTORES José Luis Arana-Echevarría Morales (Terapeuta Ocupacional de la Unidad de Rehabilitación del Hospital Universitario Fundación Alcorcón. Madrid)
INTEGRACIÓN DE UN DISPOSITIVO HÁPTICO CYBERGRASP CON UN MOTOR FÍSICO AVANZADO
 Oferta de Proyecto de Fin de Master INTEGRACIÓN DE UN DISPOSITIVO HÁPTICO CYBERGRASP CON UN MOTOR FÍSICO AVANZADO Tutores: Carlos Garre del Olmo y Miguel A. Otaduy Tristán Buscas algo más que sólo gráficos?
Oferta de Proyecto de Fin de Master INTEGRACIÓN DE UN DISPOSITIVO HÁPTICO CYBERGRASP CON UN MOTOR FÍSICO AVANZADO Tutores: Carlos Garre del Olmo y Miguel A. Otaduy Tristán Buscas algo más que sólo gráficos?
EXPLORACIÓN DEL HOMBRO DOLOROSO
 1 EXPLORACIÓN DEL HOMBRO DOLOROSO Dr. D. Antonio Lorenzo Piqueres 2 3 La cintura escapular comprende el húmero, la escápula, la clavícula y el esternón. 4 Por la anamnesis debemos valorar : Antecedentes
1 EXPLORACIÓN DEL HOMBRO DOLOROSO Dr. D. Antonio Lorenzo Piqueres 2 3 La cintura escapular comprende el húmero, la escápula, la clavícula y el esternón. 4 Por la anamnesis debemos valorar : Antecedentes
Manipulación de Tres Robots Industriales Coordinados
 Manipulación de Tres Robots Industriales Coordinados RESUMEN Fidel Chávez 1, Jorge Gudiño 1, Miguel Durán 1, Norberto López 1 (1) Facultad de Ingeniería Electromecánica (FIE), U. de C., Colima (México)
Manipulación de Tres Robots Industriales Coordinados RESUMEN Fidel Chávez 1, Jorge Gudiño 1, Miguel Durán 1, Norberto López 1 (1) Facultad de Ingeniería Electromecánica (FIE), U. de C., Colima (México)
ROBOT EXOESQUELETO PARA REHABILITACIÓN ACTIVA DE CODO DERECHO
 Memorias del XV Congreso Mexicano de Robótica 2014 Universidad Autónoma de Sinaloa XVI COMRob 2014, ISBN: En trámite 6 8 de Noviembre, 2014, Mazatlán, Sinloa, México XVI COMRob2014/ID-001 ROBOT EXOESQUELETO
Memorias del XV Congreso Mexicano de Robótica 2014 Universidad Autónoma de Sinaloa XVI COMRob 2014, ISBN: En trámite 6 8 de Noviembre, 2014, Mazatlán, Sinloa, México XVI COMRob2014/ID-001 ROBOT EXOESQUELETO
ISO/IEC 9126 ISO/IEC : Part 2 Guidance on task requeriments (1992)
") Actualmente, la usabilidad está reconocida como un importante atributo de calidad del software, habiéndose ganado un puesto entre atributos más tradicionales como el rendimiento y la fiabilidad. La Organización
Actualmente, la usabilidad está reconocida como un importante atributo de calidad del software, habiéndose ganado un puesto entre atributos más tradicionales como el rendimiento y la fiabilidad. La Organización
TÉCNICO SUPERIOR UNIVERSITARIO EN TERAPIA FISICA AREA REHABILITACIÓN EN COMPETENCIAS PROFESIONALES ASIGNATURA DE BIOMECÁNICA
 TÉCNICO SUPERIOR UNIVERSITARIO EN TERAPIA FISICA AREA REHABILITACIÓN EN COMPETENCIAS PROFESIONALES ASIGNATURA DE BIOMECÁNICA 1. Competencias Rehabilitar a personas con discapacidad sensitiva y motora,
TÉCNICO SUPERIOR UNIVERSITARIO EN TERAPIA FISICA AREA REHABILITACIÓN EN COMPETENCIAS PROFESIONALES ASIGNATURA DE BIOMECÁNICA 1. Competencias Rehabilitar a personas con discapacidad sensitiva y motora,
DIAGNÓSTICO Y TERAPIA BIOMECÁNICA
 CATÁLOGO GENERAL DIAGNÓSTICO Y TERAPIA BIOMECÁNICA CON-TREX : Sistemas para el Diagnóstico y Terapia Neuromuscular Sistemas de Diagnóstico y de Entrenamiento Computarizados (CDE): Sistemas con Feedback
CATÁLOGO GENERAL DIAGNÓSTICO Y TERAPIA BIOMECÁNICA CON-TREX : Sistemas para el Diagnóstico y Terapia Neuromuscular Sistemas de Diagnóstico y de Entrenamiento Computarizados (CDE): Sistemas con Feedback
Plataforma Tecnológica Española de Robótica
 Plataforma Tecnológica Española de Robótica ROBÓTICA DE SERVICIO EN ESPAÑA Resumen datos y perspectivas: Robótica de Servicio Profesional Robótica de Servicio Doméstico/Personal RESUMEN ROBOTS DE SERVICIO
Plataforma Tecnológica Española de Robótica ROBÓTICA DE SERVICIO EN ESPAÑA Resumen datos y perspectivas: Robótica de Servicio Profesional Robótica de Servicio Doméstico/Personal RESUMEN ROBOTS DE SERVICIO
isen SISTEMA DE CAPTURA DE MOVIMIENTO DEL CUERPO HUMANO BASADO EN SENSORES INERCIALES
 isen SISTEMA DE CAPTURA DE MOVIMIENTO DEL CUERPO HUMANO BASADO EN SENSORES INERCIALES Página 2 de 9 isen SISTEMA INERCIAL DE CAPTURA Y ANÁLISIS DE MOVIMIENTO Descripción general isen permite obtener información
isen SISTEMA DE CAPTURA DE MOVIMIENTO DEL CUERPO HUMANO BASADO EN SENSORES INERCIALES Página 2 de 9 isen SISTEMA INERCIAL DE CAPTURA Y ANÁLISIS DE MOVIMIENTO Descripción general isen permite obtener información
TITULO: SÍNDROME DE FRICCIOND E LA CINTILLA ILEOTIBIAL. AUTOR: Prof. Angel M. Orejana García.
 TITULO: SÍNDROME DE FRICCIOND E LA CINTILLA ILEOTIBIAL AUTOR: Prof. Angel M. Orejana García. Síndrome de fricción de la cintilla ileotibial Prof. Angel M. Orejana García Departamento de Enfermería. UCM
TITULO: SÍNDROME DE FRICCIOND E LA CINTILLA ILEOTIBIAL AUTOR: Prof. Angel M. Orejana García. Síndrome de fricción de la cintilla ileotibial Prof. Angel M. Orejana García Departamento de Enfermería. UCM
CIENCIA EN MOVIMIENTO SISTEMA DE REHABILITACIÓN Y BIOFEEDBACK
 SISTEMA DE REHABILITACIÓN Y BIOFEEDBACK SISTEMA DE EVALUACIÓN Y BIOFEEDBACK CIENCIA EN MOVIMIENTO VENTAJAS Registro de los datos en tiempo real. Exámenes precisos y objetivos. Niveles de dificultad de
SISTEMA DE REHABILITACIÓN Y BIOFEEDBACK SISTEMA DE EVALUACIÓN Y BIOFEEDBACK CIENCIA EN MOVIMIENTO VENTAJAS Registro de los datos en tiempo real. Exámenes precisos y objetivos. Niveles de dificultad de
MODELADO Y CONTROL DINAMICO DE UN MANIPULADOR ROBOTICO CARTESIANO DE 3 GRADOS DE LIBERTAD
 MODELADO Y CONTROL DINAMICO DE UN MANIPULADOR ROBOTICO CARTESIANO DE 3 GRADOS DE LIBERTAD DYNAMIC MODELING AND CONTROL OF A CARTESIAN ROBOTIC MANIPULATOR OF 3 DOF Raúl Martínez Juárez Richar Suni Llanos
MODELADO Y CONTROL DINAMICO DE UN MANIPULADOR ROBOTICO CARTESIANO DE 3 GRADOS DE LIBERTAD DYNAMIC MODELING AND CONTROL OF A CARTESIAN ROBOTIC MANIPULATOR OF 3 DOF Raúl Martínez Juárez Richar Suni Llanos
CINEMÁTICA INVERSA DE ROBOTS INDUSTRIALES
 I EMETRE DE 00 CINEMÁTICA INVERA DE ROBOT INDUTRIALE GERMÁN ANDRÉ RAMO FUENTE * 1. Introducción El uso de robots en ambientes industriales, y más precisamente en procesos de manufactura, ha generado toda
I EMETRE DE 00 CINEMÁTICA INVERA DE ROBOT INDUTRIALE GERMÁN ANDRÉ RAMO FUENTE * 1. Introducción El uso de robots en ambientes industriales, y más precisamente en procesos de manufactura, ha generado toda
Necesidades y disponibilidad de datos para dar seguimiento e informar sobre: 1. Indicadores de discapacidad de los ODS 2. Dar seguimiento a políticas
 Necesidades y disponibilidad de datos para dar seguimiento e informar sobre: 1. Indicadores de discapacidad de los ODS 2. Dar seguimiento a políticas públicas de discapacidad Junio, 2017 1 NECESIDADES
Necesidades y disponibilidad de datos para dar seguimiento e informar sobre: 1. Indicadores de discapacidad de los ODS 2. Dar seguimiento a políticas públicas de discapacidad Junio, 2017 1 NECESIDADES
Robótica Modular y locomoción: Aplicación a Robots Ápodos
 Robótica Modular y locomoción: Aplicación a Robots Ápodos D. Juan González Gómez Tesis Doctoral Director: Dr. Eduardo Boemo Scalvinoni Contenidos Contenidos 1. Introducción 2. Clasificación 3. Locomoción
Robótica Modular y locomoción: Aplicación a Robots Ápodos D. Juan González Gómez Tesis Doctoral Director: Dr. Eduardo Boemo Scalvinoni Contenidos Contenidos 1. Introducción 2. Clasificación 3. Locomoción
PSOAS: ANATOMÍA DEL MÚSCULO: PSOAS. Trocánter menor del fémur. Flexión de cadera + rotación externa de cadera. N. femoral (L2-L4)
") PSOAS: ANATOMÍA DEL MÚSCULO: PSOAS Origen: Inserción: Función: Inervación: Apófisis costiformes + cuerpos vertebrales + discos intervertebrales de las 5 vértebras lumbares Trocánter menor del fémur Flexión
PSOAS: ANATOMÍA DEL MÚSCULO: PSOAS Origen: Inserción: Función: Inervación: Apófisis costiformes + cuerpos vertebrales + discos intervertebrales de las 5 vértebras lumbares Trocánter menor del fémur Flexión
Lección 1: Anatomía funcional y Kinesiología Lección 1B: Anatomía funcional y
 Lección 1: Anatomía funcional y Kinesiología Lección 1B: Anatomía funcional y Biomecánica Aprendizaje Unidad 2: Anatomía funcional Entrenador Personal Proyecto elf Resultados del Aprendizaje Al final de
Lección 1: Anatomía funcional y Kinesiología Lección 1B: Anatomía funcional y Biomecánica Aprendizaje Unidad 2: Anatomía funcional Entrenador Personal Proyecto elf Resultados del Aprendizaje Al final de
Robótica PLANIFICACIONES Actualización: 1ºC/2017. Planificaciones Robótica. Docente responsable: ANIGSTEIN MAURICIO.
 Planificaciones 8615 - Robótica Docente responsable: ANIGSTEIN MAURICIO 1 de 7 OBJETIVOS El Robot es un componente cada vez más frecuente en las líneas de producción industrial y en actividades de servicios.
Planificaciones 8615 - Robótica Docente responsable: ANIGSTEIN MAURICIO 1 de 7 OBJETIVOS El Robot es un componente cada vez más frecuente en las líneas de producción industrial y en actividades de servicios.
b Universidad Politécnica de Tlaxcala, Tlaxcala,
 Evaluación de la motricidad gruesa en niños con Síndrome de Down C. Martínez-Alarcón a, L. A. Morales-Rosales a, Ignacio Algredo-Badillo b, M. Lobato-Báez a Instituto Tecnológico Superior de Misantla,
Evaluación de la motricidad gruesa en niños con Síndrome de Down C. Martínez-Alarcón a, L. A. Morales-Rosales a, Ignacio Algredo-Badillo b, M. Lobato-Báez a Instituto Tecnológico Superior de Misantla,
Robótica I ACB Participantes Comité para el Diseño de Especialidad de la DIET. Academia de Sistemas Digitales de la DIET
 1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica I Ingeniería Electrónica ACB - 0802 4 0 8 2. HISTORIA DEL PROGRAMA. Lugar
1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica I Ingeniería Electrónica ACB - 0802 4 0 8 2. HISTORIA DEL PROGRAMA. Lugar
FICHA PÚBLICA DEL PROYECTO
 NUMERO DE PROYECTO:219330 EMPRESA BENEFICIADA: Consorcio Veracruzano en TI S.A. de C.V. TÍTULO DEL PROYECTO: FisioNUI - Plataforma basada en NUI para construcción de entornos de rehabilitación fisioterapéutica
NUMERO DE PROYECTO:219330 EMPRESA BENEFICIADA: Consorcio Veracruzano en TI S.A. de C.V. TÍTULO DEL PROYECTO: FisioNUI - Plataforma basada en NUI para construcción de entornos de rehabilitación fisioterapéutica
LOS ROBOTS PARALELOS EN LA REHABILITACIÓN DEL TOBILLO.
 TITULO: LOS ROBOTS PARALELOS EN LA REHABILITACIÓN DEL TOBILLO. FABIO ABEL GOMEZ BECERRA ANTECEDENTES El tobillo es una de las articulaciones más importantes del cuerpo humano, investigaciones médicas dedican
TITULO: LOS ROBOTS PARALELOS EN LA REHABILITACIÓN DEL TOBILLO. FABIO ABEL GOMEZ BECERRA ANTECEDENTES El tobillo es una de las articulaciones más importantes del cuerpo humano, investigaciones médicas dedican
Reconstrucción cinemática del brazo humano mediante matrices de transformación
 Reconstrucción cinemática del brazo humano mediante matrices de transformación J.M. Catalán, R. Morales, L.D. Lledó, J.A. Díez, J.M. Sabater, N. García-Aracil Neuroingeneiría Biomédica, Universidad Miguel
Reconstrucción cinemática del brazo humano mediante matrices de transformación J.M. Catalán, R. Morales, L.D. Lledó, J.A. Díez, J.M. Sabater, N. García-Aracil Neuroingeneiría Biomédica, Universidad Miguel
ANÁLISIS CINEMÁTICO INVERSO DE UN ROBOT PARALELO RPU+3UPS PARA LA REHABILITACIÓN DE EXTREMIDADES INFERIORES
 !"#$%&'"()*+*&,%"'&'"-).!*/.'".)0.!*,&/&*'".)'"&*+*0.')-%-12&* +3*14567896:*.3*;7:*?3*;@>AB9:*#3*'>5C>8:*-3,988=DD=45=:*E3*;>A=>F:*#3*'9AA48>6>*G.C=B4A9FH*I*JKLM*!?#)"* * 04C4F*84F*C9A9DN4F*A9F9AC4F
!"#$%&'"()*+*&,%"'&'"-).!*/.'".)0.!*,&/&*'".)'"&*+*0.')-%-12&* +3*14567896:*.3*;7:*?3*;@>AB9:*#3*'>5C>8:*-3,988=DD=45=:*E3*;>A=>F:*#3*'9AA48>6>*G.C=B4A9FH*I*JKLM*!?#)"* * 04C4F*84F*C9A9DN4F*A9F9AC4F