Imágenes Radar de Satélite.
|
|
|
- Paula Martin Montes
- hace 8 años
- Vistas:
Transcripción
1 Imágenes Radar de Satélite. Aplicación a la Cartografía y la Topografía. Ventajas de las imágenes Radar Sensor activo. Capacidad de atravesar nubes y lluvia Capacidad de registrar en la oscuridad 1

2 Capacidad de transmisión de la atmósfera Principio de funcionamiento del Radar Emisión de un pequeño pulso de energía electromagnética. Capacidad de detectar el eco atenuado reflejado con precisión direccional. Capacidad para medir el tiempo entre la emisión y la recepción. Capacidad para registrar con haz direccional y examinar un gran área. 2

3 Principio de funcionamiento Principios de funcionamiento RADAR Fuente de energía coherente Fuente monocromática puntual. Imagen como mapa de potencias. Imagen registrada como mapa de potencias y no de tensiones. Buen comportamiento de transformación. Conocer la respuesta impulsiva y la coherencia parcial del sistema. Conservación de la energía. Para poder establecer criterios de calibración. Conservación de la confusión. Se debe de mantener la incertidumbre. Conservación de coordenadas. Independencia de las coordenadas frente a las rotaciones angulares del sensor tanto en rango como en azimuth. 3

4 Ecuación de potencia del radar G 2 λ 2 P R = P T (σ 0 A) (4π) 3 R 4 Pr = Potencia Recibida Pt = Potencia trasmitida. σ 0 = Coeficiente de dispersión. G = ganancia de la antena λ = Longitud de onda del pulso. R = Altura del satélite. A = Resolución de la celda de imagen. Espectro electromagnético 4

5 Zona del espectro de trabajo en radar Bandas Microondas Radar Ka, K, and Ku Bands X-band C-band S-band L-band P-band very short wavelengths used in early airborne radar systems but uncommon today used extensively on airborne systems for military reconnaissance and terrain mapping. common on many airborne research systems (CCRS Convair-580 and NASA AirSAR) and spaceborne systems (including ERS-1 and 2 and RADARSAT). used on board the Russian ALMAZ satellite. used onboard American SEASAT and Japanese JERS-1 satellites and NASA airborne system. longest radar wavelengths, used on NASA experimental airborne research system 5

6 Geometría SAR ERS Geometría RAR 6

7 Ángulo de incidencia Ángulo de incidencia local 7

8 Configuración de registro Resolución 8
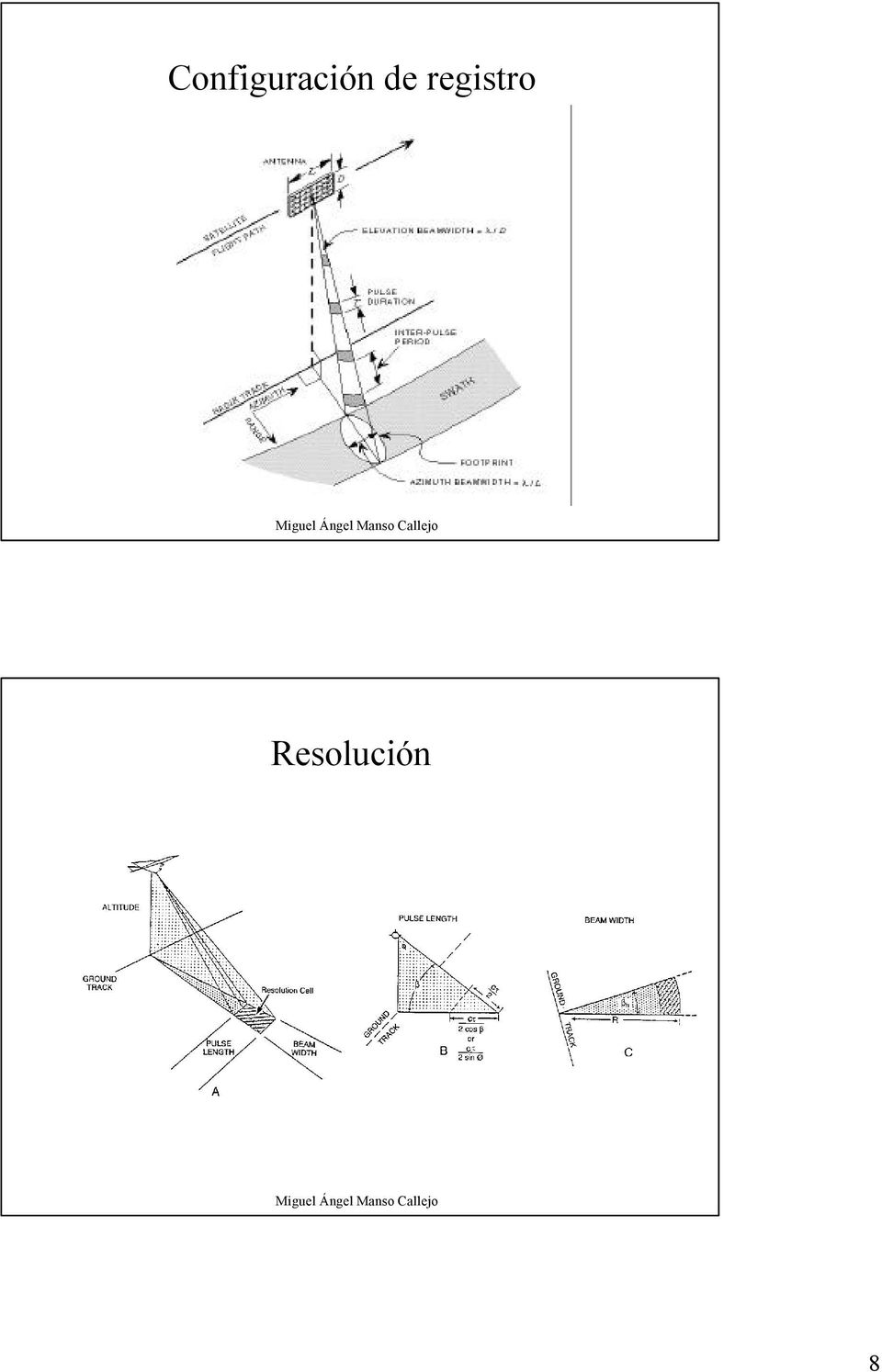
9 Resoluciones RAR Se entiende por RAR al Sistema Radar Real. Resolución en Range: δrg = c/(2 sin η B R ) c = Velocidad de la luz η = Inclinación lateral de la antena Br = Ancho banda frecuencia Resolución en Azimut: δx = R λ / La R = Altura del instrumento λ = Longitud de onda La = Longitud de la antena en la dirección del azimut Resoluciones SAR SAR : Sistema Radar de Apertura Sintética Resolución en Azimut: δx = La / 2 La = Longitud de la antena en la dirección del azimut Resolución en Range: δrg = c/(2 sin η B R ) c = Velocidad de la luz η = Inclinación lateral de la antena Br = Ancho banda frecuencia 9

10 SLAR vs SAR Analizando la resolución en Azimut se puede interpretar: SLAR cuanto más larga la antena mejor resolución. SAR cuanto mas corta la antena mejor. Principio físico: Efecto doppler Parámetros que afectan a la dispersión. Los distintos tipos de superficies generan distintos tipos de dispersiones: Áreas urbanas: dispersión muy fuerte. Bosques: dispersión intermedia. Agua calmada: baja dispersión. El coeficiente de dispersión proporciona información de la superficie y depende de: Parámetros de observación (frecuencia, polarizaciones, ángulo de incidencia). Parámetros de superficie (rugosidad, geometría, permeabilidad dieléctrica). 10

11 Efectos sobre la dispersión Frecuencia determina: Profundidad de penetración. Rugosidad relativa de la superficie considerada. Profundidad de penetración: Depende de la humedad del objetivo. Las Microondas no penetran mas allá de unos milímetros en el agua. Polarización. La polarización depende de las orientaciones de los campos eléctrico y magnético Permite determinar distintas capas del objetivo en función de la polarización utilizada. Efectos sobre la dispersión Rugosidad: Se trata de un concepto relativo comparado con la longitud de onda. Angulo de incidencia: La dispersión depende de la posición del objeto frente al nadir. Cuanto más próximo más sensible. Humedad: La permeabilidad y conductividad dieléctrica dependen de la humedad. Los cambios son fuertes. La profundidad de penetración también depende de la humedad. 11

12 Distorsión de la imagen Radar Distorsión de escala Desplazamientos del relieve Foreshortening Layover 12

13 Foreshortening Layover 13

14 Efectos del relieve Compresión por pendientes Sombras Shadows 14

15 Bandas utilizadas por satélites con radar Capacidad de penetración Bandas Radar 15

16 Capacidad de penetración en el hielo. Banda X C C L Frecuencia 10.3GHz 5.3GHz 5.2GHz 1.25GHz ε (Parte Real de ε) ε (Parte Imaginaria de ε) Profundidad penetración 8.1m 0.027m 21.7m 0.404m Capacidad de penetración en sólidos 16

17 Aplicaciones del SAR Obtención del espectro de las olas de agua en el océano. Clasificación de tipos de hielos. Seguimiento de desplazamientos del hielo. Modelos digitales del terreno por interferometría Detección automática de vertidos de fuel. Altímetros radar. Radargrametría. Geodesia: Determinación del geoide Procesado en azimuth 17

18 Range Migration Preproceso de imágenes SAR Ruido Speckle. Se trata de ruido producido por la suma vectorial (módulo + fase) de los distintos ecos producidos por las reflexiones en la superfic ie. Dicha suma aleatoria se produce de una forma indeseada y genera pixel s claros y oscuros como ruido speckle. Se recomienda eliminar dicho ruido antes de cualquier procesamiento de la imagen. Métodos de eliminación: Filtros estándar: Media, Mediana, Kuan (mínimos cuadrados), Lee (también), Gamma ( Maximización a posteriori), Frost ( adaptativo de Wiener), Kalman (adaptativo basado en predicción), Geométricos (no lineales), Oddy (considerado de mediana) y AFS (filtro adaptativo de superficies) Filtros Wavelet (ejemplo Daubechies simétrico) 18

19 Filtrado de Media (Speckle) Se trata de sustituir el valor de cada píxel por la media de los píxeles encerrados en la ventana del filtro. No elimina la aberración del ruido sino que lo suaviza. Tamaño de la ventana: Teóricamente grande : compensar claros con oscuros. Práctica: No muy grande por producir pérdida de detalles. Filtrado de Mediana (Speckle) Consiste en ordenar numéricamente los valores de los píxeles encerrados en la ventana del filtro y tomar el valor que se encuentra en la mitad del rango para sustituir el punto en la imagen. Es útil para reducir ruido impulsivo o puntual. El ruido con amplitudes menores a la mitad de la ventana son eliminados. Mantiene las rampas. 19
 Consiste en ordenar numéricamente los valores de los píxeles encerrados en la ventana del filtro y tomar el valor que se encuentra en la mitad")
20 Filtrado regiones locales (Speckle) Se generan en la ventana del filtro 8 ventanas de menor orden colocadas según orientaciones. Se calcula la varianza de cada ventana. Se sustituye el valor del ppixel por la media de la ventan que menor varianza ha generado. Se supone que la ventana con menor varianza tiene los píxeles menos afectados por la onda que genera la interferencia. La imagen así generada está formada por una serie de áreas uniformes, cuyo tamaño depende del tamaño de la ventana que se usa. En la práctica se suele utilizar secuencialmente 2 o 3 veces incrementando el tamaño de la ventana. El resultado así conseguido se utiliza para realizar clasificación. Filtrado Lee (Speckle) Se supone que el ruido puede ser modelado matemáticamente con media 1 y desviación estándar s ó coeficiente de variación. S = 0.52 Se basa en que la media y varianza del píxel de interés es igual a la media y varianza de la ventana del filtro. El cálculo es el siguiente: Valor final = [Media] + K [Valor inicial Media] K = Var(x) / [ Media 2 σ 2 + Var(x)] Varianza ventana + Media ventana 2 Var(x) = Media ventana 2 σ

21 Filtrado Sigma (Speckle) Se basa en que el ruido sigue una distribución Gausiana y asume que el 95.5% de las muestras aleatorias están dentro de 2 veces la desviación estándar del rango Se reemplaza el píxel de interés con la media de los píxeles de la ventana, Los píxeles de interés serán aquellos que caen dentro del rango designado. Se suele seguir un proceso repetitivo y la forma de aplicarlo es la siguiente: Pass Valor σ Multiplicador σ Window x x x7 Filtrado de congelado (Speckle) Se asume que el ruido es multiplicativo con estadísticos estacionarios. Se basa en un algoritmo que minimiza el error cuadrático medio que se adapta a las características de la imagen. Valor = Σ nxn k α e α t k = cte de normalización. I = media local, σ = varianza local. σ = coeficiente de variación de la imagen t = x x 0 + y y 0 α = (4/ n σ 2 ) ( σ 2 / I 2 ) n = tamaño de la ventana 21
22 Gamma-MAP (Speckle) Se trata de un filtro de maximización a posteriori, que estime el valor del pixel asumiendo que existe pérdida entre la media local y el valor con el ruido. Se maximiza a posteriori la función de densidad de probabilidad respecto a la imagen original. Se aplica ya que por ejemplo las áreas con vegetación natural producen ruido speckle con distribución Gamma. Algoritmo: I 3 I I 2 + σ (I Valor) = 0 I = valor sugerido. I = media local σ = Varianza original de la imagen Reducción de Speckle con Wavelet 22
23 Ejemplos usando filtros Wavelet Imagen con ruido Speckle Filtrada Otros Filtrada Wavelet Otros Ejemplos Speckle Wavelet Sin ruido Con ruido Otro Filtro Filtrada Wavelet 23
24 Comparativas simuladas de filtros Comparativas resultados Filtros Speckle 24
25 Protocolo propuesto para eliminar Speckle Protocolo propuesto para eliminar Speckle 1º Cálculo de los estadísticos para la reducción de áreas localmente estacionarias. 2º Detección de vecinos que no son localmente estacionarios. 3º Replicar para comparar áreas no localmente estacionarios. 4º Filtrado de Speckle de las áreas no localmente estacionarias. 5º Algoritmo multiresolución para encajar el tamaño y forma del vecino a la señal estacionaria. 25
26 Detección de bordes (Realce) Se trata de detectar bordes, líneas o puntos. Estos pueden detectar rampas, escalones, dobles rampas y sierras. Los algoritmos de detección de bordes o esquinas se basan en la 1ª y 2ª derivada. 1ª derivada Filtros Prewitt 2ª derivada Filtros Laplacianos. Procesamiento SAR 26
27 Imagen geocodificada Interpretación de imágenes radar Existen una gran diferencia entre la imagen del visible y la imagen radar en cuanto a la interpretación. Las características mas relevantes están relacionadas con la radiometría: Speckle, texturas y geometría. Las sombras en radar son consecuencia del ángulo de incidencia y no de la geometría de la iluminación solar. Los niveles de gris están relacionados con propiedad de dispersión de la superficie La dispersión es proporcional a: la rugosidad, las propiedades dieléctricas y las pendientes locales 27
28 Interpretación de imágenes radar Parámetros utilizados : Tono, texturas, formas, estructuras y tamaños. Fases de la fotointerpretación: Lectura : reconocimiento. Análisis: reconocer las capacidades Interpretación deductiva: usa la experiencia y su conocimiento temático de los datos. Tono, Formas, estructura y tamaño Tono: Valor medio de la intensidad de la dispersión. Mayor intensidad de dispersión tonos más claros. Formas: Contornos de los objetos (carreteras, puentes, aeropuertos). Estructuras: Agrupaciones espaciales con configuraciones recursivas. Tamaño: Usado como parámetro cuantitativo para evaluar la escala y dimensión de los objetos en el terreno. 28
29 Texturas Definición: Se define elemento de textura como el mas pequeño elemento homogéneo en cuanto a radiometría. Se pueden diferenciar tres tipos de texturas: Micro-texturas: Similar al ruido Speckle. Meso-texturas: o textura de escena. Se trata de la variación natural media de la dispersión en un conjunto de píxeles. Macro-texturas: variaciones en brillo que afectan a muchos píxeles: carreteras,alineamientos geológicos, sobras forestales, etc.. Texturas. El análisis de texturas se utiliza en zonas sin pendientes ni esquinas con el objetivo de segmentar la imagen e interpretarla. Se utiliza en la zona del visible auque tiene mayor interés en radar para la clasificación. Algoritmos de análisis de texturas: 1 Orden Media 2º Orden Varianza 3 Orden Skewness 4º Orden Kurtosis 29
30 Análisis de texturas Consideraciones sobre texturas El ruido Speckle se superpone con carácter multiplicativo creando problemas en el análisis de texturas o detección de bordes. El tono es un concepto local. La variación local del tono es la que proporciona la textura. Textura depende de la distribución espacial de los píxeles y por tanto de la escena no del sistema. La textura y la estructura está limitada por la resolución espacial. El filtrado y el análisis de texturas se deben de realizar sobre la imagen original (Slant range). La imagen ground range está radiométricamente distorsionada. 30
31 Corrección radiométrica Se pueden producir errores en radiometría por: Imperfecciones en las antenas de Tx y Rx Ruido Speckle Señales fuertes de ámbito cercano. Solución: Promediar el brillo de cada línea con una constante, el valor de la constante suele ser el brillo medio de toda la imagen a i = valor medio de cada fila. Valor medio total = (Σ a i )/x Coeficiente de calibración i = valor medio total / a i Slant to Ground Range Conversion 31
32 Interferometría SAR Objetivo: Interferometría SAR Obtención de la altura del suelo a partir de dos imágenes SAR obtenidas desde puntos próximos. Geometría del modelo 32
33 Ecuaciones del modelo Se ha aplicado: Teorema del coseno: c 2 =a 2 +b 2-2ab coseno(c) Coseno de la suma. Y propiedad : seno 2 () + coseno 2 () = 1 Dependencias encontradas Las dependencias de la altura son: B = Longitud de la línea base. ξ= Orientación de la línea base. Precisión de la z será función del conocimiento de la línea base. 33
34 Estimación de la línea base Se basan en datos precisos de las órbitas. En la existencia de un modelo digital de elevación. Reflectores en las esquinas. Se aprovecha la tierra plana en la escena. Modelo propuesto por ZESS: No se necesitan reflectores en las esquinas. No se impone la restricción de tierra plana en la escena. Independencia de los datos de la órbita. Se pueden estimar las variaciones de la línea base con el tiempo. Independencia de la precisión de las cotas de los puntos de control. Técnica utilizada (Basada en filtros de Kalman) Requiere un conocimiento muy pobre de la altura del terreno. Proporciona en muy poco tiempo una estimación de la línea base. Se recomienda usar una estimación coarse en cualquier caso. Flujo de procesamiento para InSAR 34
35 Objetivo: Imagen Co-Registration Disponer de dos imágenes (par) correladas ( casadas ) de la misma superficie. Mecanismos: Correlación en el dominio original (módulo). Correlación en el dominio de Fourier (fft). Fases: Búsqueda de desplazamiento. Remuestreso de una de ellas. Generación del interferograma Se define como la diferencia de fases entre las dos imágenes. Las expresiones que rigen el proceso son: Interferograma en módulo 2π 35
36 Fase Unwrapping La idea fundamental es la estimación del número de ciclos completos de longitud de onda para a partir de ella y el interferograma poder determinar la elevación del terreno. Se trata de un proceso complejo, y existen varios algoritmos con estimaciones que pretenden obtener la máxima precisión y bondad del método. Fundamentos matemáticos: Soluciones al fase unwrapping Problemas prácticos de la determinación de la fase desde el interferograma: Se suele realizar una integración de las fases suponiendo que la diferencia de fases entre dos puntos adyacentes es inferior a π. El problema que puede aparecer es que los caminos de integración no generen el mismo resultado. Ejemplo: Original 1ª fila - columnas 1ª columna- filas 36
37 Algoritmos de unwrapping Recorte de residuos (Branch-cut) (tree) Goldstein Mínimos cuadrados. Mínimos cuadrados ponderados. Síntesis de los anteriores. Estimación de pendientes locales del suelo. Suavizados adaptados recursivos. Filtro de kalman. Minimización de diferencias ponderadas. Recorte de residuos Se basa en la localización de circulaciones entre las fases de los píxeles vecinos para determinar si hay saltos de fase, y en su caso marcarlos generando árboles. Estos árboles según crecen pueden llegar a cerrarse y dejar aisladas zonas en las que sea imposible recuperar la fase
38 Mínimos cuadrados Ghiglia and Romano aprovecharon teoría de Hunt. Sea ϕij la fase del interferograma Sea φij la estimación de la fase que minimiza la diferencia entre el gradiente calculado entre la fase del interferograma y el presunto suavizado unwrapped. s = P φ + n Sea s la medida de diferencia de fase entre filas y columnas de ϕ. Sea P la matriz conteniendo (1, -1 y 0) que describen las operaciones de diferenciación entre filas y columnas. Sea φ la fase. Sea n el ruido La solución mínimo cuadrática es φ = (P T P) -1 P T s Solución: Mínimos cuadrados cont. Diferencias en filas y columnas Se trata de la versión discreta de la ecuación de Poisson y puede ser calculada eficientemente por la transformada discreta del coseno 38
39 Mínimos cuadrados ponderados Se pondera la diferencia del gradiente. Ws = W Pφ + n φ = (P T W T WP) -1 P T W T Ws Método iterativo propuesto por Ghiglia y Romero con criterio de convergencia ε Síntesis de los tres anteriores Se trata de aplicar de forma ordenada y óptima los tres anteriores algoritmos para obtener el interferograma en fase completa. Método: Usar método de mínimos cuadrados. Usar método de recorte de residuos. Calcular la diferencia entre los anteriores. Aplicar mínimos cuadrados ponderados. 39
40 Estimación de las pendientes del suelo. Se basa en un preprocesamiento del interferograma para originar los datos y mejorar la estimación. Se sucede con la estimación de las pendientes del interferograma con fase completa a partir de los gradientes de las fases del interferograma. Por último se integra generando la imagen con fases completas. Uso de suavizados adaptativos recursivos Se basa en que un interferograma puede ser suavizado hasta convertirlo en un plano sin la existencia de ruido o de residuos, de tal forma que se garantiza la existencia de un interferograma suavizado cuya diferencia con el original no tiene residuos. Filosofía de funcionamiento: Suavizar interferograma Restarlo del anterior. Nuevo interferograma. Se intenta integración si hay residuos 40
41 Filtrado de kalman Se utiliza para estimar y fundir con el estimador de pendientes locales del suelo. Minimización de diferencias ponderadas Método propuesto por Constantini en 1996 que trata de minimizar diferencias entre vecinos de forma ponderada. Para ello aprovecha algunas técnicas de búsqueda del camino más corto en una red. 41
42 Coherencia Se trata de un producto derivado del interferograma. Su definición matemática es: Corrección geométrica del DEM. Métodos: 2 Pasos: Cálculo de alturas previo a la transformación a un sistema de coordenadas. 1 Paso: Cálculo del sistema de coordenadas a partir de la posición del sensor, señal de rango, frecuencia central doppler y la fase del interferograma. Refinado: Consiste en utilizar puntos de control para corregir las desviaciones y movimientos en las direcciones crosstrack y nadir. Se calcula una constante de fase que posteriormente permite calcular la fase absoluta desde el interferograma.. 42
43 Corrección geométrica del DEM. Otro método: Consisten en el cálculo de vectores tridimensionales. Hace la aproximación de que los dos vectores desde los sensores al punto son paralelos. Apoyado en la utilización de una base ortogonal que se calcula a partir del rango, doppler central y la ecuación de fase del interferograma. Método de refinado de la línea base por mínimos cuadrados: Se basa en que el vector de estado del momento puede ser refinado ya que el otro parámetro ( modelo de la órbita) garantiza la precisión. Para este modelo se conocen las distintas fases del algoritmo de implementación: Fases refinado línea base por Mínimos Cuadrados 1º Refinado de la geometría de la imagen 2º Refinado por mínimos cuadrados del conocimiento de la línea base. 3º Cálculo de las coordenadas en el espacio para cada pixel del interferograma por el método de Newton- Raphson. 4º Transformación al sistema de coordenadas de la proyección cartográfica. 5º Generación del modelo digital de elevación 43
44 Interferograma Imagen de coherencia 44
45 Modelo Digital de Elevación Fuentes de error y precisiones InSAR Las fuentes de error en la generación de los modelos digitales de elevación por interferometría son: Estimación de la fase genera errores en la estimación de la altura. Errores en el conocimiento de la línea base genera errores en el modelo. Precisión de los DEM en ERS1 < 5m (error cuadrático medio) 45
46 Detección de movimientos InSAR Interferogrametría SAR Diferencial 46
Aprender a realizar filtrados de información en capas de SIG raster.
 TEMA 40: OPERACIONES DE VECINDAD INMEDIATA OBJETO DEL TEMA: Conocer los diferentes tipos de operaciones de análisis de vecindad inmediata y su metodología de aplicación en los Sistemas de Información Geográfica
TEMA 40: OPERACIONES DE VECINDAD INMEDIATA OBJETO DEL TEMA: Conocer los diferentes tipos de operaciones de análisis de vecindad inmediata y su metodología de aplicación en los Sistemas de Información Geográfica
Tercera Sesión de Conversación (CHAT): Aplicación de Sensores Remotos Satelitales de Microondas
: Aplicación de Sensores Remotos Satelitales de Microondas") Tercera Sesión de Conversación (CHAT): Aplicación de Sensores Remotos Satelitales de Microondas Introducción Actualmente el desarrollo de sensores satelitales de microondas o radar está orientado a generar
Tercera Sesión de Conversación (CHAT): Aplicación de Sensores Remotos Satelitales de Microondas Introducción Actualmente el desarrollo de sensores satelitales de microondas o radar está orientado a generar
Nuevas técnicas de obtención de información topográfica. Fotogrametría digital. GPS
 UNIVERSIDAD DIEGO PORTALES Escuela de Ingeniería en Obras Civiles Carlos Rodolfo Marín Uribe Magister en Ingeniería de Vías Terrestres Estudiante Doctorado en Ciencias de la Ingeniería crmarin@uc.cl Nuevas
UNIVERSIDAD DIEGO PORTALES Escuela de Ingeniería en Obras Civiles Carlos Rodolfo Marín Uribe Magister en Ingeniería de Vías Terrestres Estudiante Doctorado en Ciencias de la Ingeniería crmarin@uc.cl Nuevas
CAPÍTULO 6 SIMULACIONES Y RESULTADOS
 CAPÍTULO 6 SIMULACIONES Y RESULTADOS 6.1 Proceso de Simulación Las simulaciones fueros llevadas a cabo empleando como herramienta la Versión 6.5 Release 13 de Matlab. Para lo cual fue empleado un banco
CAPÍTULO 6 SIMULACIONES Y RESULTADOS 6.1 Proceso de Simulación Las simulaciones fueros llevadas a cabo empleando como herramienta la Versión 6.5 Release 13 de Matlab. Para lo cual fue empleado un banco
FILTRADO DE IMÁGENES
 FILTRADO DE IMÁGENES 1 INDICE RUIDO Qué es el ruido? Tipos de ruido TECNICAS DE FILTRADO EN DOMINIO ESPACIAL Promediado de imágenes Filtros de orden Filtros de medias DOMINIO FRECUENCIAL FUNCIONES EN MATLAB
FILTRADO DE IMÁGENES 1 INDICE RUIDO Qué es el ruido? Tipos de ruido TECNICAS DE FILTRADO EN DOMINIO ESPACIAL Promediado de imágenes Filtros de orden Filtros de medias DOMINIO FRECUENCIAL FUNCIONES EN MATLAB
SIG. CIAF Centro de Investigación y Desarrollo en Información Geográfica. Fundamentos de Sistemas de Información Geográfica C U R S O.
 Grupo SIG C U R S O Fundamentos de Sistemas de Información Geográfica UNIDAD 2 Datos geográficos y métodos de almacenamiento Tema 2 Modelos y estructuras de datos CIAF Centro de Investigación y Desarrollo
Grupo SIG C U R S O Fundamentos de Sistemas de Información Geográfica UNIDAD 2 Datos geográficos y métodos de almacenamiento Tema 2 Modelos y estructuras de datos CIAF Centro de Investigación y Desarrollo
Reconocimiento de imágenes
 Capítulo 4 Reconocimiento de imágenes En la actualidad, el reconocimiento de imágenes es una herramienta de gran utilidad en el área de control y automatización. Varias empresas usan el reconocimiento
Capítulo 4 Reconocimiento de imágenes En la actualidad, el reconocimiento de imágenes es una herramienta de gran utilidad en el área de control y automatización. Varias empresas usan el reconocimiento
INTERFEROMETRÍA RADAR DIFERENCIAL (DInSAR)
") ANEXO 3 INTERFEROMETRÍA RADAR DIFERENCIAL (DInSAR) El presente anexo, que resume y expone los datos del trabajo de Fernández (Paz) et al. (2009), amplia ligeramente el subapartado 3.1.2.1 del capítulo
ANEXO 3 INTERFEROMETRÍA RADAR DIFERENCIAL (DInSAR) El presente anexo, que resume y expone los datos del trabajo de Fernández (Paz) et al. (2009), amplia ligeramente el subapartado 3.1.2.1 del capítulo
CAPÍTULO 7 7. CONCLUSIONES
 CAPÍTULO 7 7. CONCLUSIONES 7.1. INTRODUCCIÓN 7.2. CONCLUSIONES PARTICULARES 7.3. CONCLUSIONES GENERALES 7.4. APORTACIONES DEL TRABAJO DE TESIS 7.5. PROPUESTA DE TRABAJOS FUTUROS 197 CAPÍTULO 7 7. Conclusiones
CAPÍTULO 7 7. CONCLUSIONES 7.1. INTRODUCCIÓN 7.2. CONCLUSIONES PARTICULARES 7.3. CONCLUSIONES GENERALES 7.4. APORTACIONES DEL TRABAJO DE TESIS 7.5. PROPUESTA DE TRABAJOS FUTUROS 197 CAPÍTULO 7 7. Conclusiones
4 Localización de terremotos
 513430 - Sismología 27 4 Localización de terremotos 4.1 Localización de sismos locales Fig 27: Gráfico de la ruptura en la superficie de una falla. La ruptura se propaga desde el punto de la nucleación,
513430 - Sismología 27 4 Localización de terremotos 4.1 Localización de sismos locales Fig 27: Gráfico de la ruptura en la superficie de una falla. La ruptura se propaga desde el punto de la nucleación,
Soluciones Integrales en Geomática Ingeniería Geoespacial
 Soluciones Integrales en Geomática Ingeniería Geoespacial KOMPSAT 3 IMÁGENES SATELITALES DE ALTA RESOLUCIÓN 2014 1 TABLA DE CONTENIDOS QuickBird. 3 WorldView-1.... 4 WorldView-2......5 GeoEye-1.. 6 Ikonos........7
Soluciones Integrales en Geomática Ingeniería Geoespacial KOMPSAT 3 IMÁGENES SATELITALES DE ALTA RESOLUCIÓN 2014 1 TABLA DE CONTENIDOS QuickBird. 3 WorldView-1.... 4 WorldView-2......5 GeoEye-1.. 6 Ikonos........7
EL MODELO DE DATOS RASTER
 EL MODELO DE DATOS RASTER El modelo de datos raster, como señala Bosque (1992), es el modelo de datos complementario al modelo vectorial presentado anteriormente. Tiene como principal característica el
EL MODELO DE DATOS RASTER El modelo de datos raster, como señala Bosque (1992), es el modelo de datos complementario al modelo vectorial presentado anteriormente. Tiene como principal característica el
8.1. Introducción... 1. 8.2. Dependencia/independencia estadística... 2. 8.3. Representación gráfica: diagrama de dispersión... 3. 8.4. Regresión...
 Tema 8 Análisis de dos variables: dependencia estadística y regresión Contenido 8.1. Introducción............................. 1 8.2. Dependencia/independencia estadística.............. 2 8.3. Representación
Tema 8 Análisis de dos variables: dependencia estadística y regresión Contenido 8.1. Introducción............................. 1 8.2. Dependencia/independencia estadística.............. 2 8.3. Representación
Detección de bordes: metodos lineales de cálculo de gradientesk, etc. Detección de bordes. Métodos basados en operadores lineales de gradiente
 Detección de bordes Métodos basados en operadores lineales de gradiente 1 Bordes Variaciones fuertes de la intensidad que corresponden a las fronteras de los objetos visualizados Métodos basados en el
Detección de bordes Métodos basados en operadores lineales de gradiente 1 Bordes Variaciones fuertes de la intensidad que corresponden a las fronteras de los objetos visualizados Métodos basados en el
OTDR. Sistemas de transmisión por Fibra Optica
 OTDR INTRODUCCION Un OTDR es un reflectómetro óptico en el dominio tiempo. Es un instrumento de medición que envía pulsos de luz, a la longitud de onda deseada (ejemplo 3ra ventana:1550 nm), para luego
OTDR INTRODUCCION Un OTDR es un reflectómetro óptico en el dominio tiempo. Es un instrumento de medición que envía pulsos de luz, a la longitud de onda deseada (ejemplo 3ra ventana:1550 nm), para luego
Tema 1.- Introducción a la Visión Artificial
 Tema 1.- Introducción a la Visión Artificial Visión Artificial Avanzada Prof. Dr. Nicolás Luis Fernández García Departamento de Informática y Análisis Numérico Escuela Politécnica Superior Universidad
Tema 1.- Introducción a la Visión Artificial Visión Artificial Avanzada Prof. Dr. Nicolás Luis Fernández García Departamento de Informática y Análisis Numérico Escuela Politécnica Superior Universidad
Tema 4:Segmentación de imágenes
 Tema 4:Segmentación de imágenes La segmentación de imágenes divide la imagen en sus partes constituyentes hasta un nivel de subdivisión en el que se aíslen las regiones u objetos de interés. Los algoritmos
Tema 4:Segmentación de imágenes La segmentación de imágenes divide la imagen en sus partes constituyentes hasta un nivel de subdivisión en el que se aíslen las regiones u objetos de interés. Los algoritmos
Tema 6: Morfología. Primera parte
 Tema 6: Morfología Primera parte Morfología La morfología matemática se basa en operaciones de teoría de conjuntos. En el caso de imágenes binarias, los conjuntos tratados son subconjuntos de Z 2 y en
Tema 6: Morfología Primera parte Morfología La morfología matemática se basa en operaciones de teoría de conjuntos. En el caso de imágenes binarias, los conjuntos tratados son subconjuntos de Z 2 y en
DETECCIÓN PASIVA. Jean PLA, Gestión de Frecuencias CNES, Toulouse, FRANCIA jean.pla@cnes.fr
 Seminario de la UIT para la Región de las Américas DETECCIÓN PASIVA Jean PLA, Gestión de Frecuencias CNES, Toulouse, FRANCIA jean.pla@cnes.fr Jean PLA CNES 21/09/ 2012, MANTA Ecuador, ITU Seminar for Americas
Seminario de la UIT para la Región de las Américas DETECCIÓN PASIVA Jean PLA, Gestión de Frecuencias CNES, Toulouse, FRANCIA jean.pla@cnes.fr Jean PLA CNES 21/09/ 2012, MANTA Ecuador, ITU Seminar for Americas
Introducción a la percepción remota mediante radar
 Introducción a la percepción remota mediante radar Natural Resources Ressources naturelles Canada Canada Esquema del curso Por qué se emplea la percepción remota mediante radar? Fundamentos del radar SAR
Introducción a la percepción remota mediante radar Natural Resources Ressources naturelles Canada Canada Esquema del curso Por qué se emplea la percepción remota mediante radar? Fundamentos del radar SAR
Tema 3. Medidas de tendencia central. 3.1. Introducción. Contenido
 Tema 3 Medidas de tendencia central Contenido 31 Introducción 1 32 Media aritmética 2 33 Media ponderada 3 34 Media geométrica 4 35 Mediana 5 351 Cálculo de la mediana para datos agrupados 5 36 Moda 6
Tema 3 Medidas de tendencia central Contenido 31 Introducción 1 32 Media aritmética 2 33 Media ponderada 3 34 Media geométrica 4 35 Mediana 5 351 Cálculo de la mediana para datos agrupados 5 36 Moda 6
Comunicaciones Digitales - Ejercicios Tema 3
 Comunicaciones Digitales - Ejercicios Tema 3 007. 1. Considere el diagrama de rejilla para un canal discreto equivalente genérico con 4 coeficientes no nulos (memoria K p = 3) y una constelación -PAM.
Comunicaciones Digitales - Ejercicios Tema 3 007. 1. Considere el diagrama de rejilla para un canal discreto equivalente genérico con 4 coeficientes no nulos (memoria K p = 3) y una constelación -PAM.
Se podría entender como una matriz de filas y columnas. Cada combinación de fila y columna se denomina celda. Por ejemplo la celda A1, B33, Z68.
 Departamento de Economía Aplicada: UDI de Estadística. Universidad Autónoma de Madrid Notas sobre el manejo de Excel para el análisis descriptivo y exploratorio de datos. (Descriptiva) 1 1 Introducción
Departamento de Economía Aplicada: UDI de Estadística. Universidad Autónoma de Madrid Notas sobre el manejo de Excel para el análisis descriptivo y exploratorio de datos. (Descriptiva) 1 1 Introducción
I.E.S.MEDITERRÁNEO CURSO 2015 2016 DPTO DE MATEMÁTICAS PROGRAMA DE RECUPERACIÓN DE LOS APRENDIZAJES NO ADQUIRIDOS EN MATEMÁTICAS DE 3º DE E.S.O.
 PROGRAMA DE RECUPERACIÓN DE LOS APRENDIZAJES NO ADQUIRIDOS EN MATEMÁTICAS DE 3º DE E.S.O. Este programa está destinado a los alumnos que han promocionado a cursos superiores sin haber superado esta materia.
PROGRAMA DE RECUPERACIÓN DE LOS APRENDIZAJES NO ADQUIRIDOS EN MATEMÁTICAS DE 3º DE E.S.O. Este programa está destinado a los alumnos que han promocionado a cursos superiores sin haber superado esta materia.
Constelación de Satélites Navstar
 Constelación de Satélites Navstar El Sistema GPS (Sistema de Posicionamiento Global) fue creado por el Departamento de Defensa de los Estados Unidos (DD) para constituir un sistema de navegación preciso
Constelación de Satélites Navstar El Sistema GPS (Sistema de Posicionamiento Global) fue creado por el Departamento de Defensa de los Estados Unidos (DD) para constituir un sistema de navegación preciso
Parte I: Introducción
 Parte I: Introducción Introducción al Data Mining: su Aplicación a la Empresa Cursada 2007 POR QUÉ? Las empresas de todos los tamaños necesitan aprender de sus datos para crear una relación one-to-one
Parte I: Introducción Introducción al Data Mining: su Aplicación a la Empresa Cursada 2007 POR QUÉ? Las empresas de todos los tamaños necesitan aprender de sus datos para crear una relación one-to-one
Qué es una imágen digital?
 Qué es una imágen digital? Una imagen digital es una fotografía, un dibujo, un trabajo artístico o cualquier otra imagen que es convertida en un fichero de ordenador. Qué es una imágen digital? Una imagen
Qué es una imágen digital? Una imagen digital es una fotografía, un dibujo, un trabajo artístico o cualquier otra imagen que es convertida en un fichero de ordenador. Qué es una imágen digital? Una imagen
Capítulo 8. Tipos de interés reales. 8.1. Introducción
 Capítulo 8 Tipos de interés reales 8.1. Introducción A lo largo de los capítulos 5 y 7 se ha analizado el tipo de interés en términos nominales para distintos vencimientos, aunque se ha desarrollado más
Capítulo 8 Tipos de interés reales 8.1. Introducción A lo largo de los capítulos 5 y 7 se ha analizado el tipo de interés en términos nominales para distintos vencimientos, aunque se ha desarrollado más
Universidad Nacional de Quilmes Ing. en Automatización y Control Industrial Cátedra: Visión Artificial Agosto de 2005
 Apertura y Clausura (Opening and Closing) Como vimos, la dilatación y la erosión están muy relacionadas con la forma; la primera operación expande la imagen mientras que la segunda la contrae. La dilatación
Apertura y Clausura (Opening and Closing) Como vimos, la dilatación y la erosión están muy relacionadas con la forma; la primera operación expande la imagen mientras que la segunda la contrae. La dilatación
Sistemas de Sensación Segmentación, Reconocimiento y Clasificación de Objetos. CI-2657 Robótica M.Sc. Kryscia Ramírez Benavides
 Sistemas de Sensación Segmentación, Reconocimiento y Clasificación de Objetos CI-2657 Robótica M.Sc. Kryscia Ramírez Benavides Introducción La visión artificial, también conocida como visión por computador
Sistemas de Sensación Segmentación, Reconocimiento y Clasificación de Objetos CI-2657 Robótica M.Sc. Kryscia Ramírez Benavides Introducción La visión artificial, también conocida como visión por computador
Procesamiento Digital de Imágenes Tema 7: Técnicas de Restauración. Rafael Palacios Hielscher Curso de Doctorado 2002-2003
 Procesamiento Digital de Imágenes Tema 7: Técnicas de Restauración Rafael Palacios Hielscher Curso de Doctorado 2002-2003 Conceptos básicos Restauración consiste en corregir la degradación sufrida por
Procesamiento Digital de Imágenes Tema 7: Técnicas de Restauración Rafael Palacios Hielscher Curso de Doctorado 2002-2003 Conceptos básicos Restauración consiste en corregir la degradación sufrida por
TOPOGRAFÍA LÁSER CON EL MÉTODO I-SITE APLICADO A MINERÍA. El sistema de escáner I- Site es un método de levantamiento topográfico terrestre
 TOPOGRAFÍA LÁSER CON EL MÉTODO I-SITE APLICADO A MINERÍA 1. Introducción El sistema de escáner I- Site es un método de levantamiento topográfico terrestre desarrollado para recopilar información tridimensional
TOPOGRAFÍA LÁSER CON EL MÉTODO I-SITE APLICADO A MINERÍA 1. Introducción El sistema de escáner I- Site es un método de levantamiento topográfico terrestre desarrollado para recopilar información tridimensional
RECOMENDACIÓN UIT-R SA.1030. (Cuestión UIT-R 143/7) b) que estos requisitos afectan a las asignaciones y a otros asuntos reglamentarios,
 b) que estos requisitos afectan a las asignaciones y a otros asuntos reglamentarios,") Rec. UIT-R SA.1030 1 RECOMENDACIÓN UIT-R SA.1030 REQUISITOS DE TELECOMUNICACIÓN DE LOS SISTEMAS DE SATÉLITE PARA LA GEODESIA Y LA GEODINÁMICA (Cuestión UIT-R 143/7) Rec. UIT-R SA.1030 (1994) La Asamblea
Rec. UIT-R SA.1030 1 RECOMENDACIÓN UIT-R SA.1030 REQUISITOS DE TELECOMUNICACIÓN DE LOS SISTEMAS DE SATÉLITE PARA LA GEODESIA Y LA GEODINÁMICA (Cuestión UIT-R 143/7) Rec. UIT-R SA.1030 (1994) La Asamblea
MODELOS DE DATOS EN UN SIG: RÁSTER Y VECTORIAL. Los datos espaciales refieren a entidades o fenómenos que cumplen los siguientes principios básicos:
 MODELOS DE DATOS EN UN SIG: RÁSTER Y VECTORIAL Los datos espaciales refieren a entidades o fenómenos que cumplen los siguientes principios básicos: Tienen posición absoluta: sobre un sistema de coordenadas
MODELOS DE DATOS EN UN SIG: RÁSTER Y VECTORIAL Los datos espaciales refieren a entidades o fenómenos que cumplen los siguientes principios básicos: Tienen posición absoluta: sobre un sistema de coordenadas
Procesamiento de Imágenes
 Procesamiento de Imágenes Curso 011 - Clase Filtros Espaciales Filtrado espacial Ya trabajamos procesando sólo al piel individualmente. Ahora vamos a hacer un procesamiento en una vecindad de cada piel.
Procesamiento de Imágenes Curso 011 - Clase Filtros Espaciales Filtrado espacial Ya trabajamos procesando sólo al piel individualmente. Ahora vamos a hacer un procesamiento en una vecindad de cada piel.
Rec. UIT-R SM.1268-1 1 RECOMENDACIÓN UIT-R SM.1268-1 *
 Rec. UIT-R SM.1268-1 1 RECOMENDACIÓN UIT-R SM.1268-1 * MÉTODO DE MEDICIÓN DE LA MÁXIMA DESVIACIÓN DE FRECUENCIA DE LAS EMISIONES DE RADIODIFUSIÓN A UTILIZAR EN LAS ESTACIONES DE COMPROBACIÓN TÉCNICA (Cuestión
Rec. UIT-R SM.1268-1 1 RECOMENDACIÓN UIT-R SM.1268-1 * MÉTODO DE MEDICIÓN DE LA MÁXIMA DESVIACIÓN DE FRECUENCIA DE LAS EMISIONES DE RADIODIFUSIÓN A UTILIZAR EN LAS ESTACIONES DE COMPROBACIÓN TÉCNICA (Cuestión
CAPITULO 4. Inversores para control de velocidad de motores de
 CAPITULO 4. Inversores para control de velocidad de motores de inducción mediante relación v/f. 4.1 Introducción. La frecuencia de salida de un inversor estático está determinada por la velocidad de conmutación
CAPITULO 4. Inversores para control de velocidad de motores de inducción mediante relación v/f. 4.1 Introducción. La frecuencia de salida de un inversor estático está determinada por la velocidad de conmutación
MATEMÁTICA NM4 4º EM
 MATEMÁTICA NM4 4º EM UNIDADES TEMÁTICAS UNIDAD Nº 01: ESTADÍSTICA Y PROBABILIDAD Conceptos generales : Población, muestra, parámetro y estadístico Variables y su clasificación Medición y escalas Organización
MATEMÁTICA NM4 4º EM UNIDADES TEMÁTICAS UNIDAD Nº 01: ESTADÍSTICA Y PROBABILIDAD Conceptos generales : Población, muestra, parámetro y estadístico Variables y su clasificación Medición y escalas Organización
3.1. FUNCIÓN SINUSOIDAL
 11 ÍNDICE INTRODUCCIÓN 13 CIRCUITOS DE CORRIENTE CONTINUA 19 Corriente eléctrica. Ecuación de continuidad. Primera ley de Kirchhoff. Ley de Ohm. Ley de Joule. Fuerza electromotriz. Segunda ley de Kirchhoff.
11 ÍNDICE INTRODUCCIÓN 13 CIRCUITOS DE CORRIENTE CONTINUA 19 Corriente eléctrica. Ecuación de continuidad. Primera ley de Kirchhoff. Ley de Ohm. Ley de Joule. Fuerza electromotriz. Segunda ley de Kirchhoff.
Procesamiento digital de imágenes
 Procesamiento digital de imágenes Septiembre 2013 Fuente: Héctor del Valle (2007) y Emilio Chuvieco (2008) El procesamiento digital no se originó con los sensores remotos y no está restringido a este tipo
Procesamiento digital de imágenes Septiembre 2013 Fuente: Héctor del Valle (2007) y Emilio Chuvieco (2008) El procesamiento digital no se originó con los sensores remotos y no está restringido a este tipo
Capítulo 12: Indexación y asociación
 Capítulo 12: Indexación y asociación Conceptos básicos Índices ordenados Archivos de índice de árbol B+ Archivos de índice de árbol B Asociación estática Asociación dinámica Comparación entre indexación
Capítulo 12: Indexación y asociación Conceptos básicos Índices ordenados Archivos de índice de árbol B+ Archivos de índice de árbol B Asociación estática Asociación dinámica Comparación entre indexación
Estadística con Excel Informática 4º ESO ESTADÍSTICA CON EXCEL
 1. Introducción ESTADÍSTICA CO EXCEL La estadística es la rama de las matemáticas que se dedica al análisis e interpretación de series de datos, generando unos resultados que se utilizan básicamente en
1. Introducción ESTADÍSTICA CO EXCEL La estadística es la rama de las matemáticas que se dedica al análisis e interpretación de series de datos, generando unos resultados que se utilizan básicamente en
CAPÍTULO 1 INTRODUCCIÓN
 CAPÍTULO 1 INTRODUCCIÓN En este capítulo se plantea de forma general el problema que motivó el presente trabajo de investigación. Asimismo, se abordan y describen los objetivos de esta tesis, exponiendo
CAPÍTULO 1 INTRODUCCIÓN En este capítulo se plantea de forma general el problema que motivó el presente trabajo de investigación. Asimismo, se abordan y describen los objetivos de esta tesis, exponiendo
SUPERFICIE ESPECULAR Y LAMBERTIANA
 SUPERFICIE ESPECULAR Y LAMBERTIANA Especular: es la superficie ideal en la que se cumple perfectamente la ley de la reflexión (ángulo incidente = ángulo reflejado). Lambertiana: es la superficie, también
SUPERFICIE ESPECULAR Y LAMBERTIANA Especular: es la superficie ideal en la que se cumple perfectamente la ley de la reflexión (ángulo incidente = ángulo reflejado). Lambertiana: es la superficie, también
Rec. UIT-R P.527-3 1 RECOMENDACIÓN UIT-R P.527-3 * CARACTERÍSTICAS ELÉCTRICAS DE LA SUPERFICIE DE LA TIERRA
 Rec. UIT-R P.527-3 1 RECOMENDACIÓN UIT-R P.527-3 * CARACTERÍSTICAS ELÉCTRICAS DE LA SUPERFICIE DE LA TIERRA Rc. 527-3 (1978-1982-1990-1992) La Asamblea de Radiocomunicaciones de la UIT, considerando a)
Rec. UIT-R P.527-3 1 RECOMENDACIÓN UIT-R P.527-3 * CARACTERÍSTICAS ELÉCTRICAS DE LA SUPERFICIE DE LA TIERRA Rc. 527-3 (1978-1982-1990-1992) La Asamblea de Radiocomunicaciones de la UIT, considerando a)
Tema 4: Acústica física IV
 Tema 4: Acústica física IV Impedancia acústica. Intensidad acústica. Una única onda progresiva o regresiva. Intensidad acústica de ondas provenientes de varias fuentes. Ondas curvas 4.1 Impedancia acústica
Tema 4: Acústica física IV Impedancia acústica. Intensidad acústica. Una única onda progresiva o regresiva. Intensidad acústica de ondas provenientes de varias fuentes. Ondas curvas 4.1 Impedancia acústica
Representación de señales de audio
 Representación de señales de audio Emilia Gómez Gutiérrez Síntesi i Processament del So I Departament de Sonologia Escola Superior de Musica de Catalunya Curso 2009-2010 emilia.gomez@esmuc.cat 28 de septiembre
Representación de señales de audio Emilia Gómez Gutiérrez Síntesi i Processament del So I Departament de Sonologia Escola Superior de Musica de Catalunya Curso 2009-2010 emilia.gomez@esmuc.cat 28 de septiembre
Autor: Javier Yáñez García
 Curso 2009-2010 2010 Universidad Carlos III de Madrid PROYECTO FIN DE CARRERA: TRACKING DE PERSONAS A PARTIR DE VISIÓN ARTIFICIAL Autor: Javier Yáñez García Contenidos 1. Introducción 2. Estado del arte
Curso 2009-2010 2010 Universidad Carlos III de Madrid PROYECTO FIN DE CARRERA: TRACKING DE PERSONAS A PARTIR DE VISIÓN ARTIFICIAL Autor: Javier Yáñez García Contenidos 1. Introducción 2. Estado del arte
Fundamentos de Materiales - Prácticas de Laboratorio Práctica 9. Práctica 9 DETERMINACIÓN DEL ÍNDICE DE REFRACCIÓN DE MATERIALES TRANSPARENTES
 Práctica 9 DETERMINACIÓN DEL ÍNDICE DE REFRACCIÓN DE MATERIALES TRANSPARENTES 1. Objetivos docentes Familiarizarse con las propiedades ópticas de refracción y reflexión de materiales transparentes. 2.
Práctica 9 DETERMINACIÓN DEL ÍNDICE DE REFRACCIÓN DE MATERIALES TRANSPARENTES 1. Objetivos docentes Familiarizarse con las propiedades ópticas de refracción y reflexión de materiales transparentes. 2.
Geometría analítica. Impreso por Juan Carlos Vila Vilariño Centro I.E.S. PASTORIZA
 Conoce los vectores, sus componentes y las operaciones que se pueden realizar con ellos. Aprende cómo se representan las rectas y sus posiciones relativas. Impreso por Juan Carlos Vila Vilariño Centro
Conoce los vectores, sus componentes y las operaciones que se pueden realizar con ellos. Aprende cómo se representan las rectas y sus posiciones relativas. Impreso por Juan Carlos Vila Vilariño Centro
PREPROCESADO DE DATOS PARA MINERIA DE DATOS
 Ó 10.1007/978-3-319-02738-8-2. PREPROCESADO DE DATOS PARA MINERIA DE DATOS Miguel Cárdenas-Montes Frecuentemente las actividades de minería de datos suelen prestar poca atención a las actividades de procesado
Ó 10.1007/978-3-319-02738-8-2. PREPROCESADO DE DATOS PARA MINERIA DE DATOS Miguel Cárdenas-Montes Frecuentemente las actividades de minería de datos suelen prestar poca atención a las actividades de procesado
TEMA 5 PROCESADO DE IMÁGENES EN EL DOMINIO DE LA FRECUENCIA.
 TEMA 5 PROCESADO DE IMÁGENES EN EL DOMINIO DE LA FRECUENCIA. 1. - INTRODUCCIÓN Las operaciones que hemos realizado hasta ahora sobre una imagen, se realizaron en el dominio espacial, es decir, trabajando
TEMA 5 PROCESADO DE IMÁGENES EN EL DOMINIO DE LA FRECUENCIA. 1. - INTRODUCCIÓN Las operaciones que hemos realizado hasta ahora sobre una imagen, se realizaron en el dominio espacial, es decir, trabajando
CAPÍTULO 3. ALGORITMOS DE PREVISIÓN BASADOS EN LA EXTRAPOLACIÓN DE LOS DATOS MÁS RECIENTES
 CAPÍTULO 3. ALGORITMOS DE PREVISIÓN BASADOS EN LA EXTRAPOLACIÓN DE LOS DATOS MÁS RECIENTES El objetivo de esta tesina es la introducción de mejoras en la previsión meteorológica a corto plazo. El punto
CAPÍTULO 3. ALGORITMOS DE PREVISIÓN BASADOS EN LA EXTRAPOLACIÓN DE LOS DATOS MÁS RECIENTES El objetivo de esta tesina es la introducción de mejoras en la previsión meteorológica a corto plazo. El punto
Regulador PID con convertidores de frecuencia DF5, DV5, DF6, DV6. Página 1 de 10 A Regulador PID
 A Página 1 de 10 A Regulador PID INDICE 1. Regulador PID 3 2. Componente proporcional : P 4 3. Componente integral : I 4 4. Componente derivativa : D 4 5. Control PID 4 6. Configuración de parámetros del
A Página 1 de 10 A Regulador PID INDICE 1. Regulador PID 3 2. Componente proporcional : P 4 3. Componente integral : I 4 4. Componente derivativa : D 4 5. Control PID 4 6. Configuración de parámetros del
Práctica 2 - Procesamiento de Imágenes
 Práctica 2 - Procesamiento de Imágenes En esta práctica veremos diferentes técnicas de tratamiento que suelen ser aplicadas a las imágenes obtenidas desde satélites. Muchos de los procedimientos que aprendamos
Práctica 2 - Procesamiento de Imágenes En esta práctica veremos diferentes técnicas de tratamiento que suelen ser aplicadas a las imágenes obtenidas desde satélites. Muchos de los procedimientos que aprendamos
Estructura de los sistemas de distribución de radiodifusión sonora y de TV Objetivos
 Estructura de los sistemas de distribución de radiodifusión sonora y de TV Objetivos Conocer los distintos elementos que constituyen una instalación colectiva para la distribución de señales de televisión
Estructura de los sistemas de distribución de radiodifusión sonora y de TV Objetivos Conocer los distintos elementos que constituyen una instalación colectiva para la distribución de señales de televisión
Monitoreo de los procesos de desertificación con el uso de imágenes de radar
 UN-OOSA UN-SPIDER Monitoreo de los procesos de desertificación con el uso de imágenes de radar Héctor F. del Valle delvalle@cenpat.edu.ar hfdelvalle@gmail.com Rosario, Argentina, 19 al 23 de Abril de 2010
UN-OOSA UN-SPIDER Monitoreo de los procesos de desertificación con el uso de imágenes de radar Héctor F. del Valle delvalle@cenpat.edu.ar hfdelvalle@gmail.com Rosario, Argentina, 19 al 23 de Abril de 2010
MATEMÁTICAS ESO EVALUACIÓN: CRITERIOS E INSTRUMENTOS CURSO 2014-2015 Colegio B. V. María (Irlandesas) Castilleja de la Cuesta (Sevilla) Página 1 de 7
 Castilleja de la Cuesta (Sevilla) Página 1 de 7") Página 1 de 7 1 CRITERIOS DE EVALUACIÓN 1.1 SECUENCIA POR CURSOS DE LOS CRITERIOS DE EVALUACION PRIMER CURSO 1. Utilizar números naturales y enteros y fracciones y decimales sencillos, sus operaciones
Página 1 de 7 1 CRITERIOS DE EVALUACIÓN 1.1 SECUENCIA POR CURSOS DE LOS CRITERIOS DE EVALUACION PRIMER CURSO 1. Utilizar números naturales y enteros y fracciones y decimales sencillos, sus operaciones
ESPECIFICACIONES TÉCNICAS. de la Ortofoto infrarroja de Cataluña 1:25000 (OI-25M) v2.1
 v2.1") ESPECIFICACIONES TÉCNICAS de la Ortofoto infrarroja de Cataluña 1:25000 (OI-25M) v2.1 ESPECIFICACIONES TÉCNICAS Revisión del documento 1.0 (septiembre 2010) de la Ortofoto Infrarroja de Cataluña 1:25
ESPECIFICACIONES TÉCNICAS de la Ortofoto infrarroja de Cataluña 1:25000 (OI-25M) v2.1 ESPECIFICACIONES TÉCNICAS Revisión del documento 1.0 (septiembre 2010) de la Ortofoto Infrarroja de Cataluña 1:25
IDENTIFICACIÓN DE SISTEMAS ASPECTOS PRÁCTICOS EN IDENTIFICACIÓN
 IDENTIFICACIÓN DE SISTEMAS ASPECTOS PRÁCTICOS EN IDENTIFICACIÓN Ing. Fredy Ruiz Ph.D. ruizf@javeriana.edu.co Maestría en Ingeniería Electrónica Pontificia Universidad Javeriana 2013 CONSIDERACIONES PRÁCTICAS
IDENTIFICACIÓN DE SISTEMAS ASPECTOS PRÁCTICOS EN IDENTIFICACIÓN Ing. Fredy Ruiz Ph.D. ruizf@javeriana.edu.co Maestría en Ingeniería Electrónica Pontificia Universidad Javeriana 2013 CONSIDERACIONES PRÁCTICAS
ESTIMACIÓN. puntual y por intervalo
 ESTIMACIÓN puntual y por intervalo ( ) Podemos conocer el comportamiento del ser humano? Podemos usar la información contenida en la muestra para tratar de adivinar algún aspecto de la población bajo estudio
ESTIMACIÓN puntual y por intervalo ( ) Podemos conocer el comportamiento del ser humano? Podemos usar la información contenida en la muestra para tratar de adivinar algún aspecto de la población bajo estudio
Índice. prólogo a la tercera edición...13
 Índice prólogo a la tercera edición...13 Capítulo 1. CONCEPTOS BÁSICOS Y LEYES FUNDAMENTALES DE LOS CIRCUITOS...17 1.1 CORRIENTE ELÉCTRICA...18 1.1.1 Densidad de corriente...23 1.2 LEY DE OHM...23 1.3
Índice prólogo a la tercera edición...13 Capítulo 1. CONCEPTOS BÁSICOS Y LEYES FUNDAMENTALES DE LOS CIRCUITOS...17 1.1 CORRIENTE ELÉCTRICA...18 1.1.1 Densidad de corriente...23 1.2 LEY DE OHM...23 1.3
SOCIEDAD DE FLEBOLOGIA Y LINFOLOGIA BONAERENSE CURSO DE ECODOPPLER E INTERVENCIONISMOS ECODIRIGIDOS
 SOCIEDAD DE FLEBOLOGIA Y LINFOLOGIA BONAERENSE CURSO DE ECODOPPLER E INTERVENCIONISMOS ECODIRIGIDOS NOCIONES BASICAS DEL ULTRASONIDO Es una onda sonora con frecuencia mayor superior a la frecuencia audible
SOCIEDAD DE FLEBOLOGIA Y LINFOLOGIA BONAERENSE CURSO DE ECODOPPLER E INTERVENCIONISMOS ECODIRIGIDOS NOCIONES BASICAS DEL ULTRASONIDO Es una onda sonora con frecuencia mayor superior a la frecuencia audible
1. Introducción. Universidad de Cantabria 1-1
 1. Introducción Las empresas de transporte y distribución de energía eléctrica tuvieron que afrontar históricamente el problema que suponía el aumento de la energía reactiva que circulaba por sus líneas.
1. Introducción Las empresas de transporte y distribución de energía eléctrica tuvieron que afrontar históricamente el problema que suponía el aumento de la energía reactiva que circulaba por sus líneas.
Comunicaciones Satelitales
 Comunicaciones Satelitales Un satélite de comunicaciones es un satélite artificial que gira en el espacio con el propósito de servir como repetidor a servicios de telecomunicaciones usando frecuencias
Comunicaciones Satelitales Un satélite de comunicaciones es un satélite artificial que gira en el espacio con el propósito de servir como repetidor a servicios de telecomunicaciones usando frecuencias
CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION
 CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION Como hemos dicho anteriormente, los instrumentos de medición hacen posible la observación de los fenómenos eléctricos y su cuantificación. Ahora
CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION Como hemos dicho anteriormente, los instrumentos de medición hacen posible la observación de los fenómenos eléctricos y su cuantificación. Ahora
CAPÍTULO 4 MÉTODOS PARA LA CARACTERIZACIÓN DE ANTENAS 4.1 INTRODUCCION 4.2 CARACTERIZACIÓN DE ANTENAS
 CAPÍTULO 4 MÉTODOS PARA LA CARACTERIZACIÓN DE ANTENAS 4.1 INTRODUCCION Las antenas son elementos clave en la ingeniería eléctrica, la definición del Instituto de Ingenieros Eléctricos y Electrónicos (IEEE)
CAPÍTULO 4 MÉTODOS PARA LA CARACTERIZACIÓN DE ANTENAS 4.1 INTRODUCCION Las antenas son elementos clave en la ingeniería eléctrica, la definición del Instituto de Ingenieros Eléctricos y Electrónicos (IEEE)
Ajustes de sombras. 1) Añadir localización
 Añadir localización") Ajustes de sombras El cuadro de diálogo "Ajustes de sombras" se utiliza para controlar las funciones de proyección de sombras de SketchUp, incluyendo su visibilidad, la fecha y la hora, la posición geográfica
Ajustes de sombras El cuadro de diálogo "Ajustes de sombras" se utiliza para controlar las funciones de proyección de sombras de SketchUp, incluyendo su visibilidad, la fecha y la hora, la posición geográfica
La relación entre la altura de caída y el tiempo que tarda en rebotar 6 veces una pelota
 La relación entre la altura de caída y el tiempo que tarda en rebotar 6 veces una pelota INTRODUCCIÓN En este experimento voy a relacionar el tiempo que tarda una pelota en rebotar 6 veces desde distintas
La relación entre la altura de caída y el tiempo que tarda en rebotar 6 veces una pelota INTRODUCCIÓN En este experimento voy a relacionar el tiempo que tarda una pelota en rebotar 6 veces desde distintas
Inversores De Frecuencia
 Inversores De Frecuencia QUÉ ES UN INVERSOR? Un inversor es un control para motores, que hace variar la velocidad a motores C.A. De inducción. Esta variación la logra variando la frecuencia de alimentación
Inversores De Frecuencia QUÉ ES UN INVERSOR? Un inversor es un control para motores, que hace variar la velocidad a motores C.A. De inducción. Esta variación la logra variando la frecuencia de alimentación
Electrotecnia General Tema 8 TEMA 8 CAMPO MAGNÉTICO CREADO POR UNA CORRIENTE O UNA CARGA MÓVIL
 TEMA 8 CAMPO MAGNÉTICO CREADO POR UNA CORRIENTE O UNA CARGA MÓVIL 8.1. CAMPO MAGNÉTICO CREADO POR UN ELEMENTO DE CORRIENTE Una carga eléctrica en movimiento crea, en el espacio que la rodea, un campo magnético.
TEMA 8 CAMPO MAGNÉTICO CREADO POR UNA CORRIENTE O UNA CARGA MÓVIL 8.1. CAMPO MAGNÉTICO CREADO POR UN ELEMENTO DE CORRIENTE Una carga eléctrica en movimiento crea, en el espacio que la rodea, un campo magnético.
GUÍA PARA UN ESCANEO ÓPTIMO
 Condiciones para obtener un buen escaneo Los factores que intervienen en el proceso de escaneo son ambientales, propios de la configuración y calibración del escáner así como del objeto a escanear. El
Condiciones para obtener un buen escaneo Los factores que intervienen en el proceso de escaneo son ambientales, propios de la configuración y calibración del escáner así como del objeto a escanear. El
Solución: a) M = masa del planeta, m = masa del satélite, r = radio de la órbita.
 M = masa del planeta, m = masa del satélite, r = radio de la órbita.") 1 PAU Física, junio 2010. Fase específica OPCIÓN A Cuestión 1.- Deduzca la expresión de la energía cinética de un satélite en órbita circular alrededor de un planeta en función del radio de la órbita y
1 PAU Física, junio 2010. Fase específica OPCIÓN A Cuestión 1.- Deduzca la expresión de la energía cinética de un satélite en órbita circular alrededor de un planeta en función del radio de la órbita y
Introducción a los sistemas de control
 Introducción a los sistemas de control Sistema Un sistema es una combinación de componentes que actúan juntos y realizan un objetivo determinado A un sistema se le puede considerar como una caja negra
Introducción a los sistemas de control Sistema Un sistema es una combinación de componentes que actúan juntos y realizan un objetivo determinado A un sistema se le puede considerar como una caja negra
COMUNICACIONES ÓPTICAS EN EL ESPACIO LIBRE. FSO - Free Space Optics. J. R. Souza CETUC - PUC/Rio. J. R. Souza CETUC - PUC/Rio 1 ÍNDICE
 COMUNICACIONES ÓPTICAS EN EL ESPACIO LIBRE FSO - Free Space Optics J. R. Souza CETUC - PUC/Rio J. R. Souza CETUC - PUC/Rio 1 ÍNDICE Introducción Aplicaciones Ventajas y desventajas Efectos atmosféricos
COMUNICACIONES ÓPTICAS EN EL ESPACIO LIBRE FSO - Free Space Optics J. R. Souza CETUC - PUC/Rio J. R. Souza CETUC - PUC/Rio 1 ÍNDICE Introducción Aplicaciones Ventajas y desventajas Efectos atmosféricos
Mapas Autoorganizados
 Mapas Autoorganizados 1 Mapas Autoorganizados S.O.M (Self organized Maps) Mapas de características similar a la organización topológica de la corteza cerebral. Kohonen :dada una estructura y una descripción
Mapas Autoorganizados 1 Mapas Autoorganizados S.O.M (Self organized Maps) Mapas de características similar a la organización topológica de la corteza cerebral. Kohonen :dada una estructura y una descripción
Monitoreo y Cuantificación de flotas poteras a partir del uso de Imágenes Satelitales
 Monitoreo y Cuantificación de flotas poteras a partir del uso de Imágenes Satelitales Ing. Cozzolino Ezequiel Dr. Lasta Carlos Subprograma de Sensoramiento Remoto INIDEP 10 12 de noviembre de 2014, Piriápolis,
Monitoreo y Cuantificación de flotas poteras a partir del uso de Imágenes Satelitales Ing. Cozzolino Ezequiel Dr. Lasta Carlos Subprograma de Sensoramiento Remoto INIDEP 10 12 de noviembre de 2014, Piriápolis,
Última modificación: 1 de agosto de 2010. www.coimbraweb.com
 Contenido DOMINIOS DEL TIEMPO Y DE LA FRECUENCIA 1.- Señales analógicas y digitales. 2.- Señales analógicas periódicas. 3.- Representación en los dominios del tiempo y de la frecuencia. 4.- Análisis de
Contenido DOMINIOS DEL TIEMPO Y DE LA FRECUENCIA 1.- Señales analógicas y digitales. 2.- Señales analógicas periódicas. 3.- Representación en los dominios del tiempo y de la frecuencia. 4.- Análisis de
Sistemas de Información Geográficos (SIG o GIS)
") Sistemas de Información Geográficos (SIG o GIS) 1) Qué es un SIG GIS? 2) Para qué sirven? 3) Tipos de datos 4) Cómo trabaja? 5) Modelos de datos, Diseño Conceptual 6) GeoDataase (GD) 7) Cómo evaluamos
Sistemas de Información Geográficos (SIG o GIS) 1) Qué es un SIG GIS? 2) Para qué sirven? 3) Tipos de datos 4) Cómo trabaja? 5) Modelos de datos, Diseño Conceptual 6) GeoDataase (GD) 7) Cómo evaluamos
Introducción general a la compresión de datos multimedia
 Introducción general a la compresión de datos multimedia Necesidad de la compresión La mayoría de las aplicaciones multimedia requieren volúmenes importantes de almacenamiento y transmisión. CD-ROM 640
Introducción general a la compresión de datos multimedia Necesidad de la compresión La mayoría de las aplicaciones multimedia requieren volúmenes importantes de almacenamiento y transmisión. CD-ROM 640
Fundamentos de la Visión Artificial. Prof. Dr. Francisco Gómez Rodríguez Prof. Manuel J. Domínguez Morales 1
 Fundamentos de la Visión Artificial Prof. Dr. Francisco Gómez Rodríguez Prof. Manuel J. Domínguez Morales 1 Índice 1. Introducción a lavisión Artificial 2. Adquisición y representación de imágenes 3. Filtrado
Fundamentos de la Visión Artificial Prof. Dr. Francisco Gómez Rodríguez Prof. Manuel J. Domínguez Morales 1 Índice 1. Introducción a lavisión Artificial 2. Adquisición y representación de imágenes 3. Filtrado
Detección de bordes en una imagen.
 Detección de bordes en una imagen. Departamento de Ingeniería electrónica, Telecomunicación y Automática. Área de Ingeniería de Sistemas y Automática OBJETIVOS: Utilizar distintas máscaras empleadas para
Detección de bordes en una imagen. Departamento de Ingeniería electrónica, Telecomunicación y Automática. Área de Ingeniería de Sistemas y Automática OBJETIVOS: Utilizar distintas máscaras empleadas para
Integración de Monte Carlo Técnicas Avanzadas de Gráficos en 3D
 Integración de Monte Carlo Técnicas Avanzadas de Gráficos en 3D Miguel Ángel Otaduy 26 Abril 2010 Contexto Cálculo de la integral de radiancia reflejada en la ecuación de rendering Cálculo de la integral
Integración de Monte Carlo Técnicas Avanzadas de Gráficos en 3D Miguel Ángel Otaduy 26 Abril 2010 Contexto Cálculo de la integral de radiancia reflejada en la ecuación de rendering Cálculo de la integral
Matemáticas 2º BTO Aplicadas a las Ciencias Sociales
 Matemáticas 2º BTO Aplicadas a las Ciencias Sociales CONVOCATORIA EXTRAORDINARIA DE JUNIO 2014 MÍNIMOS: No son contenidos mínimos los señalados como de ampliación. I. PROBABILIDAD Y ESTADÍSTICA UNIDAD
Matemáticas 2º BTO Aplicadas a las Ciencias Sociales CONVOCATORIA EXTRAORDINARIA DE JUNIO 2014 MÍNIMOS: No son contenidos mínimos los señalados como de ampliación. I. PROBABILIDAD Y ESTADÍSTICA UNIDAD
Control Estadístico del Proceso. Ing. Claudia Salguero Ing. Alvaro Díaz
 Control Estadístico del Proceso Ing. Claudia Salguero Ing. Alvaro Díaz Control Estadístico del Proceso Es un conjunto de herramientas estadísticas que permiten recopilar, estudiar y analizar la información
Control Estadístico del Proceso Ing. Claudia Salguero Ing. Alvaro Díaz Control Estadístico del Proceso Es un conjunto de herramientas estadísticas que permiten recopilar, estudiar y analizar la información
CAPÍTULO I. Propagación de RF
 CAPÍTULO I Propagación de RF 1.1 Características de la propagación de RF. Las ondas de radio son ondas electromagnéticas que poseen una componente eléctrica y una componente magnética y como tales, están
CAPÍTULO I Propagación de RF 1.1 Características de la propagación de RF. Las ondas de radio son ondas electromagnéticas que poseen una componente eléctrica y una componente magnética y como tales, están
CONVERTIDORES DIGITAL ANALÓGICO Y ANALÓGICO - DIGITAL
 CONVERTIDORES DIGITAL ANALÓGICO Y ANALÓGICO - DIGITAL CONVERTIDORES DIGITAL ANALÓGICO Las dos operaciones E/S relativas al proceso de mayor importancia son la conversión de digital a analógico D/A y la
CONVERTIDORES DIGITAL ANALÓGICO Y ANALÓGICO - DIGITAL CONVERTIDORES DIGITAL ANALÓGICO Las dos operaciones E/S relativas al proceso de mayor importancia son la conversión de digital a analógico D/A y la
www.gtbi.net soluciones en Fotogrametría Digital El software de análisis más potente basado en objetos de datos geoespaciales. Fotogrametría Digital
 soluciones en Fotogrametría Digital El software de análisis más potente basado en objetos de datos geoespaciales. Fotogrametría Digital www.gtbi.net LA MANERA DE ENTENDER EL MUNDO ESTÁ CAMBIANDO El usuario
soluciones en Fotogrametría Digital El software de análisis más potente basado en objetos de datos geoespaciales. Fotogrametría Digital www.gtbi.net LA MANERA DE ENTENDER EL MUNDO ESTÁ CAMBIANDO El usuario
MEDICIÓN Y AJUSTE DE LOS SISTEMAS DE REFUERZO SONORO
 MEDICIÓN Y AJUSTE DE LOS SISTEMAS DE REFUERZO SONORO POR QUÉ ES NECESARIO MEDIR? QUÉ CONOCEMOS AL MEDIR UN SISTEMA DE AUDIO? QUÉ PARÁMETROS PODEMOS AJUSTAR? TIPOS DE MEDICIONES DE UN SOLO CANAL DE DOBLE
MEDICIÓN Y AJUSTE DE LOS SISTEMAS DE REFUERZO SONORO POR QUÉ ES NECESARIO MEDIR? QUÉ CONOCEMOS AL MEDIR UN SISTEMA DE AUDIO? QUÉ PARÁMETROS PODEMOS AJUSTAR? TIPOS DE MEDICIONES DE UN SOLO CANAL DE DOBLE
TEMA VI ANÁLISIS DIGITAL DE IMÁGENES
 TEMA VI ANÁLISIS DIGITAL DE IMÁGENES Qué es una imagen digital? Radianza media de una parcela Valor numérico Tratamiento digital Pixel Nº entero (ND) Pixel: unidad mínima de información en una imagen digital
TEMA VI ANÁLISIS DIGITAL DE IMÁGENES Qué es una imagen digital? Radianza media de una parcela Valor numérico Tratamiento digital Pixel Nº entero (ND) Pixel: unidad mínima de información en una imagen digital
Reducción del ruido en una imagen digital.
 Reducción del ruido en una imagen digital. Departamento de Ingeniería electrónica, Telecomunicación y Automática. Área de Ingeniería de Sistemas y Automática OBJETIVOS: Estudio de distintas máscaras para
Reducción del ruido en una imagen digital. Departamento de Ingeniería electrónica, Telecomunicación y Automática. Área de Ingeniería de Sistemas y Automática OBJETIVOS: Estudio de distintas máscaras para
Las Matemáticas En Ingeniería
 Las Matemáticas En Ingeniería 1.1. Referentes Nacionales A nivel nacional se considera que el conocimiento matemático y de ciencias naturales, sus conceptos y estructuras, constituyen una herramienta para
Las Matemáticas En Ingeniería 1.1. Referentes Nacionales A nivel nacional se considera que el conocimiento matemático y de ciencias naturales, sus conceptos y estructuras, constituyen una herramienta para
CURSO DE PREPARACIÓN PARA LA PRUEBA DE ACCESO A CICLOS FORMATIVOS DE GRADO SUPERIOR FÍSICA
 IES LA GRANJA DPTO. DE FÍSICA Y QUÍMICA CURSO DE PREPARACIÓN PARA LA PRUEBA DE ACCESO A CICLOS FORMATIVOS DE GRADO SUPERIOR FÍSICA CURSO 2013-2014 INTRODUCCIÓN ADECUACIÓN AL CONTEXTO Se trata de un alumnado
IES LA GRANJA DPTO. DE FÍSICA Y QUÍMICA CURSO DE PREPARACIÓN PARA LA PRUEBA DE ACCESO A CICLOS FORMATIVOS DE GRADO SUPERIOR FÍSICA CURSO 2013-2014 INTRODUCCIÓN ADECUACIÓN AL CONTEXTO Se trata de un alumnado
Operaciones Morfológicas en Imágenes Binarias
 Operaciones Morfológicas en Imágenes Binarias Introducción La morfología matemática es una herramienta muy utilizada en el procesamiento de i- mágenes. Las operaciones morfológicas pueden simplificar los
Operaciones Morfológicas en Imágenes Binarias Introducción La morfología matemática es una herramienta muy utilizada en el procesamiento de i- mágenes. Las operaciones morfológicas pueden simplificar los
Capítulo 6 Filtrado en el Dominio de la Frecuencia
 Capítulo 6 Filtrado en el Dominio de la Frecuencia...39 6. Método en el Dominio de la Frecuencia...39 6. Filtros Espaciales en la frecuencia...40 6.. Convolución Lineal y la Transformada Discreta de Fourier...45
Capítulo 6 Filtrado en el Dominio de la Frecuencia...39 6. Método en el Dominio de la Frecuencia...39 6. Filtros Espaciales en la frecuencia...40 6.. Convolución Lineal y la Transformada Discreta de Fourier...45
Capítulo V Resultados y conclusiones
 Capítulo V Resultados y conclusiones Nadav Levanon, autor del libro Radar Principles dijo: el estudio de los radares no solo una aplicación práctica, pero también una disciplina científica madura con fundamentos
Capítulo V Resultados y conclusiones Nadav Levanon, autor del libro Radar Principles dijo: el estudio de los radares no solo una aplicación práctica, pero también una disciplina científica madura con fundamentos
Universidad Nacional de Quilmes Ing. en Automatización y Control Industrial Cátedra: Visión Artificial Agosto de 2005
 Extracción de Frontera (Boundary Extraction) La frontera de un conjunto A, escrita como β(a), se puede obtener erosionando A por B y luego calcular la diferencia entre A y su erosión. Esto es β ( A) =
Extracción de Frontera (Boundary Extraction) La frontera de un conjunto A, escrita como β(a), se puede obtener erosionando A por B y luego calcular la diferencia entre A y su erosión. Esto es β ( A) =
Medidas de tendencia central o de posición: situación de los valores alrededor
 Tema 10: Medidas de posición y dispersión Una vez agrupados los datos en distribuciones de frecuencias, se calculan unos valores que sintetizan la información. Estudiaremos dos grandes secciones: Medidas
Tema 10: Medidas de posición y dispersión Una vez agrupados los datos en distribuciones de frecuencias, se calculan unos valores que sintetizan la información. Estudiaremos dos grandes secciones: Medidas
CLASIFICACIÓN NO SUPERVISADA
 CLASIFICACIÓN NO SUPERVISADA CLASIFICACION IMPORTANCIA PROPÓSITO METODOLOGÍAS EXTRACTORES DE CARACTERÍSTICAS TIPOS DE CLASIFICACIÓN IMPORTANCIA CLASIFICAR HA SIDO, Y ES HOY DÍA, UN PROBLEMA FUNDAMENTAL
CLASIFICACIÓN NO SUPERVISADA CLASIFICACION IMPORTANCIA PROPÓSITO METODOLOGÍAS EXTRACTORES DE CARACTERÍSTICAS TIPOS DE CLASIFICACIÓN IMPORTANCIA CLASIFICAR HA SIDO, Y ES HOY DÍA, UN PROBLEMA FUNDAMENTAL