TEORÍA DE CONTROL. Ejercicio Tanques No Lineal
|
|
|
- Enrique Vidal Carmona
- hace 5 años
- Vistas:
Transcripción
1 TEORÍ DE CONTROL Ejercicio Tanques No Lineal
2 Ejercicio: linealización en el punto de equilibrio Control de caudal en reacciones químicas
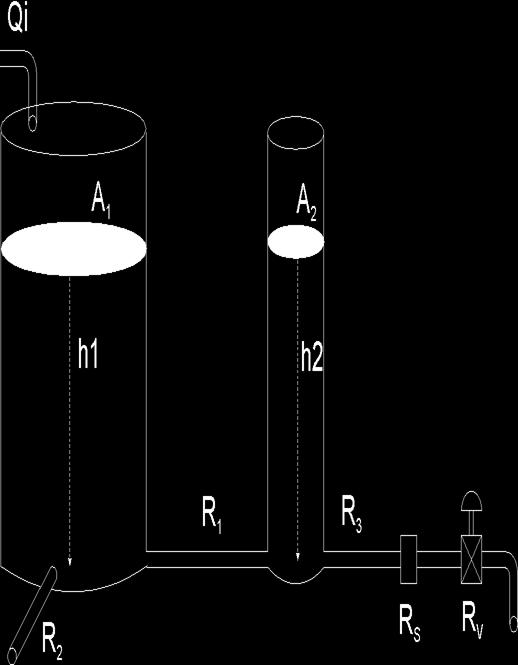
3 El líquido cuyo caudal se desea controlar se encuentra almacenado en dos tanques con áreas y respectivamente alimentados por un caudal Qi, e interconectadas a través de un conducto Desde el tanque de área se deriva una tubería de resistencia hidráulica R por donde circula el caudal hacia el otro tanque y una tubería destinada a otro proceso cuyo caudal está determinando por la resistencia R. Desde el tanque de área se deriva la tubería a la que se le desea controlar el caudal sobre la cual se encuentra el sensor de caudal y la válvula motorizada de resistencia Rv.
4 El control del caudal se realiza de la siguiente manera: a) El sensor entrega una tensión proporcional al caudal por la tubería, es decir que V S =K S.Q S. b) Esta tensión es comparada con una referencia (Vr) y convenientemente amplificada para alimentar un motor de corriente continua que es el encargado de posicionar la válvula. c) El posicionamiento del vástago de la válvula se realiza mediante una reducción compuesta por una reducción a engranaje (con relación N, N ) fijo respecto de la referencia mecánica y una cremallera de paso P, móvil respecto del engranaje de la reducción. d) La carga mecánica del movimiento de rotación está concentrada en los elementos B y J ; y la del movimiento lineal de la válvula y el tornillo, son B y K. e) La válvula ofrece una resistencia dinámica a la circulación del fluido que sigue la siguiente ley en R función de la posición del vástago: Rv 0V que finalmente se encarga de regular el caudal por la y tubería. Vs Vr I=cte
5 SOLUCIÓN ) Determinar las distintas secciones que componen el sistema separándolas por su naturaleza (mecánica, eléctrica, hidráulica) y determinar sus interfaces. ) nalizar las secciones por separado y hallar las ecuaciones matemáticas que describen su comportamiento: Ecuaciones diferenciales. Funciones transferencia. Diagrama en bloques. Circuitos equivalentes.



6 Parte Eléctrica

7 Parte Mecánica

8 Parte Mecánica
9 Parte Electro-mecánica : Ecuaciones (se consideran condiciones iniciales nulas) V V K sl R I R S W a a N N I KT P B P K Y sj B N N N sy V P N K R K si Vr q I L L L L s a W s a a a a K T N K N s I P Y B P B J N J J N N sy V P N
10 Parte Hidráulica

11 Parte Hidráulica : Circuito nálogo Q () s i h h h sh R R h h h sh R RV sh Q h i R R R sh h h h Y h R R RV R R R 0V h

12 Ecuaciones Diferenciales h h h Q i R R R h h h yh R R R0 V R K K I I h y V a W s R La La ROV La La Ecuaciones No Lineales T K N I B P B N P K y J J N N J N y P N
13 Linealización x ( t) f ( x, u) Desarrollando en series de Taylor : Punto de equilibrio f ( x, u ) f ( x, u) f ( x, u ) Definiendo 0 0 x x u u f ( x, u) x x f ( x, u) x x... x u u u u x* x x u* u u u 0 f ( x, u) x x f ( x, u) x x x x u x u u0 u u u0 0 0 * * * CTE CTE f ( x, u) xx 0 xx 0 x u uu 0 uu 0 B f ( x, u)
 4.")
14 Punto de Equilibrio Datos: Q I0 =.7x0-3 m 3 /seg; V R0 =0.5V; y 0 =0.0m Rv o R0 V seg / m y 0.0 o h0 Q I 0 R / /( R Rv ) 4.97m o h0 h 0 Rv / ( R Rv ) 4.6m o o


15 Punto de Equilibrio Datos: Q I0 =.7x0-3 m 3 /seg; V R0 =0.5V; y 0 =0.0m h0 4.97m h0 4.6m I r s y0 0.0m VR0 0.5V QI 0.70 m s 3 3
16 Modelo linealizado h h h Q i yh Ra yh K K K I h I y V * s * * W * s * * R R0 VLa h La La R0 VLa y La X X U U0 K * * N T * N K * I B P B P y J J N N J * * * * R R R yh yh h h h y h * * * * * R R R0 V y R0 V h X X U U0 * N y N * P
17 Modelo linealizado h h h Q i * * * * R R R K Ra K K h I y h I y V * s * * W * s 0 * * 0 R R0 V La La La R0 V La y La 0 K * * N T * N K * I B P B P y J J N N J ( R R y ) h h h h y * * 0V 0 * 0 * R R R0 V R0 V y0 * N y N * P
18 Modelo linealizado * 4 * 5 * * i h x h x h Q * 5 * 4 * * h x h x h y * * * * * * R I h I y V * * * * 5I y * 4 * y 5x0
TEORÍA DE CONTROL R 1 C 1 MODELOS DE ESTADO
 TEORÍA DE CONTROL MODELOS DE ESTADO 2-1) La figura muestra en forma esquemática un sistema de calentamiento de líquidos conocido como pava eléctrica. Un resistor de masa despreciable calienta una placa
TEORÍA DE CONTROL MODELOS DE ESTADO 2-1) La figura muestra en forma esquemática un sistema de calentamiento de líquidos conocido como pava eléctrica. Un resistor de masa despreciable calienta una placa
MODELADO DE SISTEMAS
 MODELADO DE SISTEMAS OBJETIVOS Introducir el concepto de modelo matemático y función de transferencia. Partiendo de los sistemas físicos se desarrolla el modelo matemático en forma de función de transferencia
MODELADO DE SISTEMAS OBJETIVOS Introducir el concepto de modelo matemático y función de transferencia. Partiendo de los sistemas físicos se desarrolla el modelo matemático en forma de función de transferencia
Tint. c) D3(y) + D2(y) + y = h(t) donde h(t) es un escalón unitario de Heaviside
 D3(y) + D2(y) + y = h(t) donde h(t) es un escalón unitario de Heaviside") 6618 TEORIA DE CONTROL I TP#1/2/3 Si faltan datos elíjalos convenientemente justificando su selección. Si hay errores márquelos justificando. 1)Se desea controlar la variable indicada en cada caso. Sugerir
6618 TEORIA DE CONTROL I TP#1/2/3 Si faltan datos elíjalos convenientemente justificando su selección. Si hay errores márquelos justificando. 1)Se desea controlar la variable indicada en cada caso. Sugerir
DEPARTAMENTO DE ELECTRONICA Y AUTOMATICA
 Universidad Nacional de San Juan - Facultad de Ingeniería DEPARTAMENTO DE ELECTRONICA Y AUTOMATICA Carrera: Ingeniería Electrónica Área CONTROL Asignatura: CONTROL I GUIA DE APRENDIZAJE Y AUTOEVALUACION
Universidad Nacional de San Juan - Facultad de Ingeniería DEPARTAMENTO DE ELECTRONICA Y AUTOMATICA Carrera: Ingeniería Electrónica Área CONTROL Asignatura: CONTROL I GUIA DE APRENDIZAJE Y AUTOEVALUACION
Código Asignatura ECTS Código Asignatura ECTS
 Origen: Grado en Ingeniería Informática 240101 Matemáticas I 6 251101 Matemáticas I 6 240103 Informática 6 251202 Informática 6 240106 Empresa 6 251104 Empresa 6 240201 Estadística 6 251205 Estadística
Origen: Grado en Ingeniería Informática 240101 Matemáticas I 6 251101 Matemáticas I 6 240103 Informática 6 251202 Informática 6 240106 Empresa 6 251104 Empresa 6 240201 Estadística 6 251205 Estadística
Contenidos Control y Automatización
 Tema 2: Modelos Matemáticos Susana Borromeo Juan Antonio Hernández Tamames Curso 2014-2015 Contenidos 1. Conceptos básicos. 2. Modelado matemático de sistemas Físicos. Linealización. Función de Transferencia
Tema 2: Modelos Matemáticos Susana Borromeo Juan Antonio Hernández Tamames Curso 2014-2015 Contenidos 1. Conceptos básicos. 2. Modelado matemático de sistemas Físicos. Linealización. Función de Transferencia
TEORÍA DE CONTROL. Modelo de Estado. Ejercicio Ascensor
 TEORÍ DE CONTROL Modelo de Estado Ejercicio scensor Ejercicio scensor El diagrama representa esquemáticamente el funcionamiento de un control de velocidad de un ascensor. El mismo es accionado por un motor
TEORÍ DE CONTROL Modelo de Estado Ejercicio scensor Ejercicio scensor El diagrama representa esquemáticamente el funcionamiento de un control de velocidad de un ascensor. El mismo es accionado por un motor
CURVAS CARACTERÍSTICAS DE VÁLVULAS
 CURVAS CARACTERÍSTICAS DE VÁLVULAS CARACTERÍSTICAS DE CAUDAL INHERENTE El obturador determina la característica de caudal de la válvula, es decir, la relación ue existe entre la posición del obturador
CURVAS CARACTERÍSTICAS DE VÁLVULAS CARACTERÍSTICAS DE CAUDAL INHERENTE El obturador determina la característica de caudal de la válvula, es decir, la relación ue existe entre la posición del obturador
TSTC. Dpt. Teoría de la Señal, Telemática y Comunicaciones. Robótica Industrial. Universidad de Granada
 Dpt. Teoría de la Señal, Telemática y Comunicaciones Robótica Industrial Universidad de Granada Tema 6: Elementos de Control en Robótica S.0 Introducción S.1 Actuadores S.1.1 S.1.2 El motor de corriente
Dpt. Teoría de la Señal, Telemática y Comunicaciones Robótica Industrial Universidad de Granada Tema 6: Elementos de Control en Robótica S.0 Introducción S.1 Actuadores S.1.1 S.1.2 El motor de corriente
Introducción a los Sistemas de Control
 Introducción a los Sistemas de Control Organización de la presentación - Introducción a la teoría de control y su utilidad - Ejemplo simple: modelado de un motor de continua que mueve una cinta transportadora.
Introducción a los Sistemas de Control Organización de la presentación - Introducción a la teoría de control y su utilidad - Ejemplo simple: modelado de un motor de continua que mueve una cinta transportadora.
GRADO EN INGENIERÍA MECÁNICA
 GRADO EN INGENIERÍA MECÁNICA TABLA DE EQUIVALENCIA DE OTRAS INGENIERÍAS AL GRADO EN INGENIERÍA MECÁNICA CÓDIGO ASIGNATURAS ITI ELECTRICIDAD (64) ASIGNATURAS GRADO INGENIERÍA MECÁNICA PRIMER CURSO 641010
GRADO EN INGENIERÍA MECÁNICA TABLA DE EQUIVALENCIA DE OTRAS INGENIERÍAS AL GRADO EN INGENIERÍA MECÁNICA CÓDIGO ASIGNATURAS ITI ELECTRICIDAD (64) ASIGNATURAS GRADO INGENIERÍA MECÁNICA PRIMER CURSO 641010
GRADO EN INGENIERÍA MECÁNICA
 GRADO EN INGENIERÍA MECÁNICA TABLA DE EQUIVALENCIA DE OTRAS INGENIERÍAS AL GRADO EN INGENIERÍA MECÁNICA CÓDIGO ASIGNATURAS ITI ELECTRICIDAD (64) ASIGNATURAS GRADO INGENIERÍA MECÁNICA PRIMER CURSO 641010
GRADO EN INGENIERÍA MECÁNICA TABLA DE EQUIVALENCIA DE OTRAS INGENIERÍAS AL GRADO EN INGENIERÍA MECÁNICA CÓDIGO ASIGNATURAS ITI ELECTRICIDAD (64) ASIGNATURAS GRADO INGENIERÍA MECÁNICA PRIMER CURSO 641010
TEORÍA DE CONTROL SISTEMAS NO LINEALES
 TEORÍA DE CONTROL SISTEMAS NO LINEALES Ecuaciones en el espacio de estados. Considere un sistema representado por un sistema de ecuaciones diferenciales ordinaras con alinealidades continuas. Las fi son
TEORÍA DE CONTROL SISTEMAS NO LINEALES Ecuaciones en el espacio de estados. Considere un sistema representado por un sistema de ecuaciones diferenciales ordinaras con alinealidades continuas. Las fi son
Tema 3: Representación de sistemas lineales. Transformada de Laplace
 Fundamentos de Control Automático 2º G. Ing. Tecn. Industrial Tema 3: Representación de sistemas lineales. Transformada de Laplace Índice del tema 1. Transformada de Laplace. Propiedades 1. Definición
Fundamentos de Control Automático 2º G. Ing. Tecn. Industrial Tema 3: Representación de sistemas lineales. Transformada de Laplace Índice del tema 1. Transformada de Laplace. Propiedades 1. Definición
W. Bolton, Año 2001 Ingeniería de Control. Cap. 2
 UNIVERSIDAD NACIONAL DEL SANTA ESCUELA DE INGENIERIA EN ENERGIA MODULO SEMANA 7 CURSO: CONTROL AUTOMATICO PROFESOR: MSC. CESAR LOPEZ AGUILAR INGENIERO EN ENERGIA-INGENIERO MECANICO ELECT 1. DEFINICION
UNIVERSIDAD NACIONAL DEL SANTA ESCUELA DE INGENIERIA EN ENERGIA MODULO SEMANA 7 CURSO: CONTROL AUTOMATICO PROFESOR: MSC. CESAR LOPEZ AGUILAR INGENIERO EN ENERGIA-INGENIERO MECANICO ELECT 1. DEFINICION
GRADO EN INGENIERÍA ELECTRÓNICA INDUSTRIAL Y AUTOMÁTICA
 GRADO EN INGENIERÍA ELECTRÓNICA INDUSTRIAL Y AUTOMÁTICA TABLA DE EQUIVALENCIA DE INGENIERÍAS INDUSTRIALES A GRADO EN INGENIERÍA ELECTRÓNICA INDUSTRIAL Y AUTOMÁTICA CÓDIGO ASIGNATURAS ITI ELECTRICIDAD (64)
GRADO EN INGENIERÍA ELECTRÓNICA INDUSTRIAL Y AUTOMÁTICA TABLA DE EQUIVALENCIA DE INGENIERÍAS INDUSTRIALES A GRADO EN INGENIERÍA ELECTRÓNICA INDUSTRIAL Y AUTOMÁTICA CÓDIGO ASIGNATURAS ITI ELECTRICIDAD (64)
Capítulo 4: Ecuaciones dinámicas del conjunto motor-carga
 Capítulo 4: Ecuaciones dinámicas del conjunto motor-carga Capítulo 4: Ecuaciones dinámicas del conjunto motor-carga 4.1. Introducción Los motores de corriente continua sin escobillas ( DC brushless motors
Capítulo 4: Ecuaciones dinámicas del conjunto motor-carga Capítulo 4: Ecuaciones dinámicas del conjunto motor-carga 4.1. Introducción Los motores de corriente continua sin escobillas ( DC brushless motors
ELEMENTOS DE CONTROL EN ROBÓTICA
 ELEMENTOS DE CONTROL EN ROBÓTICA 1. INTRODUCCIÓN. 2. ACTUADORES. a) El motor de corriente continua. b) El motor paso-a-paso. 3. ELEMENTOS DE TRANSMISIÓN DE ENERGÍA. 4. SENSORES INTERNOS. a) Sensores de
ELEMENTOS DE CONTROL EN ROBÓTICA 1. INTRODUCCIÓN. 2. ACTUADORES. a) El motor de corriente continua. b) El motor paso-a-paso. 3. ELEMENTOS DE TRANSMISIÓN DE ENERGÍA. 4. SENSORES INTERNOS. a) Sensores de
UNIVERSIDAD NACIONAL DEL SANTA ESCUELA DE INGENIERIA EN ENERGIA MODULO 5
 UNIVERSIDAD NACIONAL DEL SANTA ESCUELA DE INGENIERIA EN ENERGIA MODULO 5 CURSO: CONTROL AUTOMATICO PROFESOR: MSC. CESAR LOPEZ AGUILAR INGENIERO EN ENERGIA-INGENIERO MECANICO ELECTRICISTA I. CONTENIDO 1.
UNIVERSIDAD NACIONAL DEL SANTA ESCUELA DE INGENIERIA EN ENERGIA MODULO 5 CURSO: CONTROL AUTOMATICO PROFESOR: MSC. CESAR LOPEZ AGUILAR INGENIERO EN ENERGIA-INGENIERO MECANICO ELECTRICISTA I. CONTENIDO 1.
TAREA DE SISTEMAS DE CONTROL AVANZADO 2018_2
 TAREA DE SISTEMAS DE CONTROL AVANZADO 2018_2 (70%) Un reactor químico es un equipo en cuyo interior tiene lugar una reacción química. Los reactores se diseñan para maximizar la conversión y selectividad
TAREA DE SISTEMAS DE CONTROL AVANZADO 2018_2 (70%) Un reactor químico es un equipo en cuyo interior tiene lugar una reacción química. Los reactores se diseñan para maximizar la conversión y selectividad
CONTENIDO. Pérdidas por fricción. Pérdidas por fricción. Ecuación General de Energía 17/07/2013
 CONTENIDO Conceptos básicos sobre bombas. Tipos de bombas. Sistemas de bombeo. Mantenimiento y bombas. Ejemplo industrial. Pérdidas por fricción Un fluido en movimiento ofrece una resistencia de fricción
CONTENIDO Conceptos básicos sobre bombas. Tipos de bombas. Sistemas de bombeo. Mantenimiento y bombas. Ejemplo industrial. Pérdidas por fricción Un fluido en movimiento ofrece una resistencia de fricción
GUÍA 11: CIRCUITOS HIDRÁULICOS
 GUÍ 11: CIRCUIOS HIDRÁULICOS INRODUCCIÓN En todo circuito hidráulico hay tres partes bien diferenciadas: El grupo generador de presión, el sistema de mando y el actuador. El grupo generador de presión
GUÍ 11: CIRCUIOS HIDRÁULICOS INRODUCCIÓN En todo circuito hidráulico hay tres partes bien diferenciadas: El grupo generador de presión, el sistema de mando y el actuador. El grupo generador de presión
6.- a) Explique el funcionamiento del circuito neumático representado en el esquema. b) defina cada uno de los elementos que lo componen.
 Explique el funcionamiento del circuito neumático representado en el esquema. b) defina cada uno de los elementos que lo componen.") 1.- a) Describa los componentes empleados en el circuito neumático representado en la siguiente figura. (0,5 puntos) b) Explique el funcionamiento del circuito neumático. (1,5 puntos) 2.-.- Se dispone
1.- a) Describa los componentes empleados en el circuito neumático representado en la siguiente figura. (0,5 puntos) b) Explique el funcionamiento del circuito neumático. (1,5 puntos) 2.-.- Se dispone
INDUSTRIAS I. Ing. Pablo Martínez
 72.02 92.02 INDUSTRIAS I Ing. Pablo Martínez Septiembre 201417/04/2016 1 LÍNEAS DE AIRE COMPRIMIDO Gran capacidad de regulación y control Materia prima: aire atmosférico circundante Bajos riesgos de accidente
72.02 92.02 INDUSTRIAS I Ing. Pablo Martínez Septiembre 201417/04/2016 1 LÍNEAS DE AIRE COMPRIMIDO Gran capacidad de regulación y control Materia prima: aire atmosférico circundante Bajos riesgos de accidente
Dinámica del Robot. UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides
 UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción La dinámica se ocupa de la relación entre las fuerzas que actúan sobre un cuerpo y el movimiento en el que se origina.
UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción La dinámica se ocupa de la relación entre las fuerzas que actúan sobre un cuerpo y el movimiento en el que se origina.
Calendario exámenes Convocatoria Septiembre 2017 Grado en Ingeniería Eléctrica
 Grado en Ingeniería Eléctrica 506101001 Matemáticas I 1 M 1 sep. PS1 2 3 4 5 6 7 506101002 Física I 1 M 14 sep. PS12 PS13 PS14 PS15 506101003 Química General 1 M 4 sep. PS1 PS6 PS7 506101004 Informática
Grado en Ingeniería Eléctrica 506101001 Matemáticas I 1 M 1 sep. PS1 2 3 4 5 6 7 506101002 Física I 1 M 14 sep. PS12 PS13 PS14 PS15 506101003 Química General 1 M 4 sep. PS1 PS6 PS7 506101004 Informática
Calendario exámenes Convocatoria Junio 2018 Grado en Ingeniería Eléctrica
 Grado en Ingeniería Eléctrica 506101001 Matemáticas I 1 M 18 jun PS1 a PS9 y PS12 PS13 506101002 Física I 1 M 15 jun PS4 PS5 PS6 PS7 PS8 PS9 PS12 PS13 506101003 Química General 1 M 25 jun PS8 506101004
Grado en Ingeniería Eléctrica 506101001 Matemáticas I 1 M 18 jun PS1 a PS9 y PS12 PS13 506101002 Física I 1 M 15 jun PS4 PS5 PS6 PS7 PS8 PS9 PS12 PS13 506101003 Química General 1 M 25 jun PS8 506101004
Calendario exámenes Convocatoria Febrero 2018 Grado en Ingeniería Eléctrica
 Grado en Ingeniería Eléctrica 506101001 Matemáticas I 1 M 17 ene. PS1 a PS7 y PS11 a PS15 506101002 Física I 1 M 22 ene. PS6 506101003 Química General 1 M 7 feb. PS2 506101004 Informática Aplicada 1 M
Grado en Ingeniería Eléctrica 506101001 Matemáticas I 1 M 17 ene. PS1 a PS7 y PS11 a PS15 506101002 Física I 1 M 22 ene. PS6 506101003 Química General 1 M 7 feb. PS2 506101004 Informática Aplicada 1 M
UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID
 UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBA DE ACCESO A ESTUDIOS UNIVERSITARIOS (LOGSE) (Curso 2003-2004) MATERIA: TECNOLOGÍA INDUSTRIAL II Junio Septiembre R1 R2 INSTRUCCIONES GENERALES Y
UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBA DE ACCESO A ESTUDIOS UNIVERSITARIOS (LOGSE) (Curso 2003-2004) MATERIA: TECNOLOGÍA INDUSTRIAL II Junio Septiembre R1 R2 INSTRUCCIONES GENERALES Y
Test de ejercicios de auto-evaluación del módulo 1 Lecciones 1 y 2
 Test de ejercicios de auto-evaluación del módulo 1 Lecciones 1 y 1) La utilización de un modelo complejo para describir el comportamiento de un sistema: 1- Supone el mismo coste de simulación que un modelo
Test de ejercicios de auto-evaluación del módulo 1 Lecciones 1 y 1) La utilización de un modelo complejo para describir el comportamiento de un sistema: 1- Supone el mismo coste de simulación que un modelo
Problema 1 (60 minutos - 5 puntos)
") Amplitude Imaginary Axis EXAMEN DE JULIO DE REGULACIÓN AUTOMÁTICA (13/14) Problema 1 (6 minutos - 5 puntos) El control de temperatura de la planta Peltier de la asignatura es realizado mediante un sistema
Amplitude Imaginary Axis EXAMEN DE JULIO DE REGULACIÓN AUTOMÁTICA (13/14) Problema 1 (6 minutos - 5 puntos) El control de temperatura de la planta Peltier de la asignatura es realizado mediante un sistema
PLANTA PILOTO TANQUES RESUMEN DE ELEMENTOS Y SEÑALES
 PLANTA PILOTO TANQUES RESUMEN DE ELEMENTOS Y SEÑALES PLANTA PILOTO TANQUES PÁG. 2 DE 8 1. DESCRIPCIÓN GENERAL DE LA INSTALACIÓN. La planta piloto dispone de tres depósitos de líquido situados a diferentes
PLANTA PILOTO TANQUES RESUMEN DE ELEMENTOS Y SEÑALES PLANTA PILOTO TANQUES PÁG. 2 DE 8 1. DESCRIPCIÓN GENERAL DE LA INSTALACIÓN. La planta piloto dispone de tres depósitos de líquido situados a diferentes
Sistemas y Máquinas Fluido Mecánicas
 Sistemas y Máquinas Fluido Mecánicas Bloque III. Tema 6.1. Neumá1ca Industrial: Introducción a la Neumá1ca Industrial Carlos J. Renedo Inmaculada Fernández Diego Juan Carcedo Haya Félix Or1z Fernández
Sistemas y Máquinas Fluido Mecánicas Bloque III. Tema 6.1. Neumá1ca Industrial: Introducción a la Neumá1ca Industrial Carlos J. Renedo Inmaculada Fernández Diego Juan Carcedo Haya Félix Or1z Fernández
Sistemas y Máquinas Fluido Mecánicas
 Sistemas y Máquinas Fluido Mecánicas Bloque III. Tema 7.4. Hidráulica Industrial: Circuitos Hidráulicos Carlos J. Renedo Inmaculada Fernández Diego Juan Carcedo Haya Félix OrFz Fernández Departamento de
Sistemas y Máquinas Fluido Mecánicas Bloque III. Tema 7.4. Hidráulica Industrial: Circuitos Hidráulicos Carlos J. Renedo Inmaculada Fernández Diego Juan Carcedo Haya Félix OrFz Fernández Departamento de
AUTOMATIZACION. Identificar los elementos utilizados en sistemas neumáticos por su respectivo símbolo y característica de conexión
 AUTOMATIZACION GUIA DE TRABAJO 6 DOCENTE: VICTOR HUGO BERNAL UNIDAD No. 1 OBJETIVO GENERAL Identificar los elementos utilizados en sistemas neumáticos por su respectivo símbolo y característica de conexión
AUTOMATIZACION GUIA DE TRABAJO 6 DOCENTE: VICTOR HUGO BERNAL UNIDAD No. 1 OBJETIVO GENERAL Identificar los elementos utilizados en sistemas neumáticos por su respectivo símbolo y característica de conexión
Universidad Pontificia Bolivariana. Escuela de Ingenierías. Centro Ciencia Básica
 Universidad Pontificia Bolivariana. Escuela de Ingenierías. Centro Ciencia Básica Curso: Fundamentos de mecánica. 2015 20 Programación por semanas (teoría y práctica) Texto de apoyo Serway-Jewtt novena
Universidad Pontificia Bolivariana. Escuela de Ingenierías. Centro Ciencia Básica Curso: Fundamentos de mecánica. 2015 20 Programación por semanas (teoría y práctica) Texto de apoyo Serway-Jewtt novena
TALLER FINAL DE CONTROL AVANZADO
 TALLER FINAL DE CONTROL AVANZADO 1. Dado el sistema no lineal: x 1 = x 2 2 cos x 1 x 2 = x 2 2 + x 2 3 + u y = x 1 + x 2 x 2 > 0 a) Linealice el sistema alrededor del punto u o = 1 b) Obtenga la función
TALLER FINAL DE CONTROL AVANZADO 1. Dado el sistema no lineal: x 1 = x 2 2 cos x 1 x 2 = x 2 2 + x 2 3 + u y = x 1 + x 2 x 2 > 0 a) Linealice el sistema alrededor del punto u o = 1 b) Obtenga la función
LABORATORIO DE SISTEMAS DE CONTROL AUTOMÁTICO PRÁCTICA N 3
 ESCUELA POLITÉCNICA NACIONAL Campus Politécnico "J. Rubén Orellana R." FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control LABORATORIO DE SISTEMAS DE CONTROL AUTOMÁTICO
ESCUELA POLITÉCNICA NACIONAL Campus Politécnico "J. Rubén Orellana R." FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control LABORATORIO DE SISTEMAS DE CONTROL AUTOMÁTICO
5.1.1)Principio de funcionamiento.
Principio de funcionamiento.") CAPÍTULO 5 MÁQUINAS DE CORRIENTE CONTINUA 5.1)ASPECTOS CONSTRUCTIVOS Y PRINCI- PIO DE FUNCIONAMIENTO. 5.1.1)Principio de funcionamiento. Devanado de Estator (campo): - Objetivo: producir el campo que posibilita
CAPÍTULO 5 MÁQUINAS DE CORRIENTE CONTINUA 5.1)ASPECTOS CONSTRUCTIVOS Y PRINCI- PIO DE FUNCIONAMIENTO. 5.1.1)Principio de funcionamiento. Devanado de Estator (campo): - Objetivo: producir el campo que posibilita
Código Asignatura ECTS Código Asignatura ECTS
 Grado en Ingeniería en Tecnologías Industriales (UPNA) 242101 Matemáticas I 245101 Matemáticas I 242103 Informática 245103 Informática 242104 Expresión gráfica 245104 Expresión Gráfica 242105 Fundamentos
Grado en Ingeniería en Tecnologías Industriales (UPNA) 242101 Matemáticas I 245101 Matemáticas I 242103 Informática 245103 Informática 242104 Expresión gráfica 245104 Expresión Gráfica 242105 Fundamentos
PROBLEMAS PROPUESTOS INTRODUCCIÓN AL CONTROL DE PROCESOS
 PROBLEMAS PROPUESTOS 1. Un tanque con un serpentín por el que circula vapor se utiliza para calentar un fluido de capacidad calórica Cp. Suponga conocida la masa de líquido contenida en el tanque (M L
PROBLEMAS PROPUESTOS 1. Un tanque con un serpentín por el que circula vapor se utiliza para calentar un fluido de capacidad calórica Cp. Suponga conocida la masa de líquido contenida en el tanque (M L
CAPÍTULO 3. Conceptos y esquemas de control
 CAPÍTULO 3 Conceptos y esquemas de control 3 Conceptos y esquemas de control En este capítulo se presentan los diferentes esquemas de control aplicados a la planta piloto. Para ello se describe primero
CAPÍTULO 3 Conceptos y esquemas de control 3 Conceptos y esquemas de control En este capítulo se presentan los diferentes esquemas de control aplicados a la planta piloto. Para ello se describe primero
Asignaturas GIE Convalidación Asignaturas GIERM. Estadística e Investigación Operativa Estadística e Investigación Operativa Física II Física II
 Grado en Ingeniería de la Energía (GIE) y el Grado en Ingeniería Electrónica, Robótica y Mecatrónica (GIERM) Asignaturas GIE Convalidación Asignaturas GIERM Matemáticas I Matemáticas I Estadística e Investigación
Grado en Ingeniería de la Energía (GIE) y el Grado en Ingeniería Electrónica, Robótica y Mecatrónica (GIERM) Asignaturas GIE Convalidación Asignaturas GIERM Matemáticas I Matemáticas I Estadística e Investigación
FUNDAMENTOS Y MODELOS MATEMÁTICOS DE LOS SISTEMAS DE CONTROL UNIDAD 1
 FUNDAMENTOS Y MODELOS MATEMÁTICOS DE LOS SISTEMAS DE CONTROL UNIDAD 1 Contenido El concepto de realimentación. Establecimiento de las ecuaciones diferenciales que rigen a un sistema. Función de transferencia.
FUNDAMENTOS Y MODELOS MATEMÁTICOS DE LOS SISTEMAS DE CONTROL UNIDAD 1 Contenido El concepto de realimentación. Establecimiento de las ecuaciones diferenciales que rigen a un sistema. Función de transferencia.
INTRODUCCIÓN AL CONTROL AUTOMÁTICO DE PROCESOS. FORMAS DE REALIZAR CONTROL EN UN PROCESO.
 INTRODUCCIÓN AL CONTROL AUTOMÁTICO DE PROCESOS. FORMAS DE REALIZAR CONTROL EN UN PROCESO. Qué se necesita para diseñar un sistema de control?? Saber qué es, qué hace, cuáles son sus variables principales,
INTRODUCCIÓN AL CONTROL AUTOMÁTICO DE PROCESOS. FORMAS DE REALIZAR CONTROL EN UN PROCESO. Qué se necesita para diseñar un sistema de control?? Saber qué es, qué hace, cuáles son sus variables principales,
EXAMEN PARCIAL I
 UNIVERSIDAD NACIONAL DE INGENIERÍA - FIM MT 7 Control Moderno y Óptimo EXAMEN PARCIAL - 04I Problema : Un tanque vacio con masa m o es posicionado sobre g un resorte lineal con rigidez k. El tanque es
UNIVERSIDAD NACIONAL DE INGENIERÍA - FIM MT 7 Control Moderno y Óptimo EXAMEN PARCIAL - 04I Problema : Un tanque vacio con masa m o es posicionado sobre g un resorte lineal con rigidez k. El tanque es
CONTROL APLICADO MODELADO DE SISTEMAS DINÁMICOS
 CONTROL APLICADO MODELADO DE SISTEMAS DINÁMICOS MODELO MATEMÁTICO SISTEMA SE NECESITA CONOCER MODELO MATEMÁTICO CARACTERÍSTICAS DINÁMICAS DEBE REPRESENTAR BIEN NO ES ÚNICO Tenga presente que un modelo
CONTROL APLICADO MODELADO DE SISTEMAS DINÁMICOS MODELO MATEMÁTICO SISTEMA SE NECESITA CONOCER MODELO MATEMÁTICO CARACTERÍSTICAS DINÁMICAS DEBE REPRESENTAR BIEN NO ES ÚNICO Tenga presente que un modelo
1. GENERALIDADES DE LOS SISTEMAS NEUMÁTICOS E HIDRÁULICOS. Las diferencias entre ambas vienen dadas por la naturaleza de los fluidos utilizados:
 CONTENIDOS: -Técnicas de producción, conducción y depuración de fluidos. - Caudal. Pérdida de carga. - Elementos de accionamiento, regulación y control. Simbología. - Circuitos característicos de aplicación:
CONTENIDOS: -Técnicas de producción, conducción y depuración de fluidos. - Caudal. Pérdida de carga. - Elementos de accionamiento, regulación y control. Simbología. - Circuitos característicos de aplicación:
FECHA DE ASIGNACIÓN: 05 - febrero
 UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FISICOMECÁNICAS ESCUELA DE INGENIERÍA ELÉCTRICA, ELECTRÓNICA Y TELECOMUNICACIONES Programa de Ingeniería Eléctrica NOMBRE DE LA ASIGNATURA: CONTROL
UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FISICOMECÁNICAS ESCUELA DE INGENIERÍA ELÉCTRICA, ELECTRÓNICA Y TELECOMUNICACIONES Programa de Ingeniería Eléctrica NOMBRE DE LA ASIGNATURA: CONTROL
Universidad Simón Bolívar Departamento de Procesos y Sistemas
 Universidad Simón Bolívar Departamento de Procesos y Sistemas Guía de Ejercicios de Sistemas de Control I PS-3 Prof. Alexander Hoyo Junio 00 http://prof.usb.ve/ahoyo ahoyo@usb.ve ÍNDICE Pág. Modelaje Matemático
Universidad Simón Bolívar Departamento de Procesos y Sistemas Guía de Ejercicios de Sistemas de Control I PS-3 Prof. Alexander Hoyo Junio 00 http://prof.usb.ve/ahoyo ahoyo@usb.ve ÍNDICE Pág. Modelaje Matemático
3.4. Sensores de Velocidad y Movimiento.
 3.4. Sensores de Velocidad y Movimiento. Los sensores tacométricos, se encargan de medir la velocidad angular. Estos miden la frecuencia de impulsos de cualquier tipo de señal, que generalmente es de tipo
3.4. Sensores de Velocidad y Movimiento. Los sensores tacométricos, se encargan de medir la velocidad angular. Estos miden la frecuencia de impulsos de cualquier tipo de señal, que generalmente es de tipo
TEMA N 4 Y 5 EJERCICIOS PROPUESTOS DE SISTEMAS DINÁMICOS SEGUNDO ORDEN Y ORDEN SUPERIOR
 UNIVERSIDAD NACIONAL EXPERIMENTAL FRANCISCO DE MIRANDA COMPLEJO ACADÉMICO EL SABINO PROGRAMA DE INGENIERÍA QUÍMICA DPTO DE MECÁNICA Y TECNOLOGÍA DE LA PRODUCCIÓN DINÁMICA Y CONTROL DE PROCESOS TEMA N 4
UNIVERSIDAD NACIONAL EXPERIMENTAL FRANCISCO DE MIRANDA COMPLEJO ACADÉMICO EL SABINO PROGRAMA DE INGENIERÍA QUÍMICA DPTO DE MECÁNICA Y TECNOLOGÍA DE LA PRODUCCIÓN DINÁMICA Y CONTROL DE PROCESOS TEMA N 4
1. Concepto de amplificación de señales en los circuitos de control Amplificadores estáticos Amplificadores magnéticos...
 Contenido 1. Concepto de amplificación de señales en los circuitos de control.... 2 2. Amplificadores estáticos.... 2 2.1. Amplificadores magnéticos... 2 2.2. Amplificadores electrónicos.... 3 3. Amplificadores
Contenido 1. Concepto de amplificación de señales en los circuitos de control.... 2 2. Amplificadores estáticos.... 2 2.1. Amplificadores magnéticos... 2 2.2. Amplificadores electrónicos.... 3 3. Amplificadores
Escuela Técnica Superior de Ingenieros Industriales y de Telecomunicación Telekomunikazio eta Industria Ingeniarien Goi Mailako Eskola Teknikoa
 Reconocimiento y transferencia de créditos desde los grados de la Escuela Técnica Superior de Ingenieros Industriales y de Telecomunicación al Grado en Ingeniería Mecánica 1. Destino: a. Origen: Grado
Reconocimiento y transferencia de créditos desde los grados de la Escuela Técnica Superior de Ingenieros Industriales y de Telecomunicación al Grado en Ingeniería Mecánica 1. Destino: a. Origen: Grado
DEPARTAMENTO DE CIENCIAS DE LA ENERGIA Y MECANICA Laboratorio de Instrumentación Industrial Mecánica Laboratorio de Instrumentación Mecatrónica 2
 1. Tema: Medición de la fuerza de un cilindro neumático. 2. Objetivos: 3. Teoría. a. Determinar la característica presión fuerza de un cilindro neumático. b. Aplicación práctica de una celda de carga.
1. Tema: Medición de la fuerza de un cilindro neumático. 2. Objetivos: 3. Teoría. a. Determinar la característica presión fuerza de un cilindro neumático. b. Aplicación práctica de una celda de carga.
TRABAJO PRÁCTICO Nº 2 Herramientas Matemáticas de los Sistemas de Control
 TRABAJO PRÁCTICO Nº Herramientas Matemáticas de los Sistemas de Control PROBLEMA.1 Aplicando la definición de Transformada de Laplace encontrar la función transformada de las siguientes funciones: at a)
TRABAJO PRÁCTICO Nº Herramientas Matemáticas de los Sistemas de Control PROBLEMA.1 Aplicando la definición de Transformada de Laplace encontrar la función transformada de las siguientes funciones: at a)
CONTROL AUTOMÁTICO DE PROCESOS
 Universidad Tecnológica Nacional Facultad Regional San Francisco INGENIERÍA QUÍMICA CONTROL AUTOMÁTICO DE PROCESOS PLANIFICACIÓN CICLO LECTIVO 2015 ÍNDICE ÍNDICE... 2 PROFESIONAL DOCENTE A CARGO... 3 UBICACIÓN...
Universidad Tecnológica Nacional Facultad Regional San Francisco INGENIERÍA QUÍMICA CONTROL AUTOMÁTICO DE PROCESOS PLANIFICACIÓN CICLO LECTIVO 2015 ÍNDICE ÍNDICE... 2 PROFESIONAL DOCENTE A CARGO... 3 UBICACIÓN...
Tecnología Frigorífica (Grado en Ingeniería en Tecnologías Industriales) Primera convocatoria. 24 de enero de Nombre: Cuestiones
 Primera convocatoria. 24 de enero de Nombre: Cuestiones") Nombre: Cuestiones 1. Complete las siguientes afirmaciones: El mide el potencial de calentamiento atmosférico de un gas refrigerante. El reglamento obliga al cálculo del impacto sobre el calentamiento
Nombre: Cuestiones 1. Complete las siguientes afirmaciones: El mide el potencial de calentamiento atmosférico de un gas refrigerante. El reglamento obliga al cálculo del impacto sobre el calentamiento
Electroválvulas proporcionales servoaccionadas de 2 vías Modelo EV260B Conexión NPT. Especificaciones técnicas. Septiembre 2002
 Especificaciones técnicas Electroválvulas proporcionales servoaccionadas de 2 vías Modelo EV260B Conexión NPT Septiembre 2002 DKACV.PD.300.CN2.05 520B1405 EV260B NPT Características Para la regulación
Especificaciones técnicas Electroválvulas proporcionales servoaccionadas de 2 vías Modelo EV260B Conexión NPT Septiembre 2002 DKACV.PD.300.CN2.05 520B1405 EV260B NPT Características Para la regulación
1. Modelos Matemáticos y Experimentales 1
 . Modelos Matemáticos y Experimentales. Modelos Matemáticos y Experimentales.. Definición.. Tipos de Procesos.3. Tipos de Modelos 3.4. Transformada de Laplace 4.5. Función de Transferencia 7.6. Función
. Modelos Matemáticos y Experimentales. Modelos Matemáticos y Experimentales.. Definición.. Tipos de Procesos.3. Tipos de Modelos 3.4. Transformada de Laplace 4.5. Función de Transferencia 7.6. Función
Unidad 2 COMPONENTES
 Unidad 2 COMPONENTES Objetivo de la Unidad: Conocer los distintos elementos que conforman un sistema hidráulico, sus características y funciones. 2 SECCIONES DE UN SISTEMA HIDRÁULICO Generar Sección de
Unidad 2 COMPONENTES Objetivo de la Unidad: Conocer los distintos elementos que conforman un sistema hidráulico, sus características y funciones. 2 SECCIONES DE UN SISTEMA HIDRÁULICO Generar Sección de
Código Asignatura ECTS Código Asignatura ECTS
 3100 Pamplona Iruña Tel.: 948 1 9330 Fax: 948 1 9281 Origen: Grado en Ingeniería Informática 240101 Matemáticas I 245101 Matemáticas I 240103 Informática 245103 Informática 24010 Empresa 24510 Empresa
3100 Pamplona Iruña Tel.: 948 1 9330 Fax: 948 1 9281 Origen: Grado en Ingeniería Informática 240101 Matemáticas I 245101 Matemáticas I 240103 Informática 245103 Informática 24010 Empresa 24510 Empresa
GRADO EN INGENIERÍA EN ELECTRÓNICA INDUSTRIAL Y AUTOMÁTICA
 GRADO EN INGENIERÍA ELÉCTRICA GRADO EN INGENIERÍA EN ELECTRÓNICA INDUSTRIAL Y AUTOMÁTICA (G405) Álgebra y Geometría 6,00 1 B (G273) Álgebra y Geometría 6,00 1 B (G857) Automática I 6,00 2 U (G991) Automática
GRADO EN INGENIERÍA ELÉCTRICA GRADO EN INGENIERÍA EN ELECTRÓNICA INDUSTRIAL Y AUTOMÁTICA (G405) Álgebra y Geometría 6,00 1 B (G273) Álgebra y Geometría 6,00 1 B (G857) Automática I 6,00 2 U (G991) Automática
SISTEMAS DE CONTROL Fundamentos de modelado
 SISTEMAS DE CONTROL Fundamentos de modelado Se desarrollarán los modelos de sistemas continuos en el tiempo, eléctricos, mecánicos, electrónicos y electromecánicos, básicamente de tipo lineal, invariantes
SISTEMAS DE CONTROL Fundamentos de modelado Se desarrollarán los modelos de sistemas continuos en el tiempo, eléctricos, mecánicos, electrónicos y electromecánicos, básicamente de tipo lineal, invariantes
Electroválvulas proporcionales servoaccionadas de 2 vías Modelo EV260B
 Especificación técnica Electroválvulas proporcionales servoaccionadas de 2 vías Modelo EV260B Características EV260B Para la regulación progresiva del caudal en plantas industriales Tiempo de reacción
Especificación técnica Electroválvulas proporcionales servoaccionadas de 2 vías Modelo EV260B Características EV260B Para la regulación progresiva del caudal en plantas industriales Tiempo de reacción
Sistema Integrador Ciencia y tecnología ACTUADORES
 Sistema Integrador Ciencia y tecnología ACTUADORES ACTUADORES Se denominan actuadores a aquellos elementos que pueden provocar un efecto sobre un proceso automatizado, modificando los estados de un sistema.
Sistema Integrador Ciencia y tecnología ACTUADORES ACTUADORES Se denominan actuadores a aquellos elementos que pueden provocar un efecto sobre un proceso automatizado, modificando los estados de un sistema.
Horarios de Matrícula Bachillerato en Ingeniería Electromecánica (I 2016) Sede San Pedro
 Sede San Pedro") Bachillerato en Ingeniería Electromecánica (I 2016) Sede San Pedro II-115 Introducción Al Cálculo o Matemática Básica (Colegiado) LM,LT,LN,KM,KT,KN,MM,MN,JM,JN,VM,VT,VN,SM,SI IC-150 Dibujo Técnico ( Geometría
Bachillerato en Ingeniería Electromecánica (I 2016) Sede San Pedro II-115 Introducción Al Cálculo o Matemática Básica (Colegiado) LM,LT,LN,KM,KT,KN,MM,MN,JM,JN,VM,VT,VN,SM,SI IC-150 Dibujo Técnico ( Geometría
Ejercicios de Sistemas Mecánicos Traslación
 EjerciciosMSS_ Ejercicios de Sistemas Mecánicos Traslación. Dibujar el diagrama de cuerpo libre y obtener el modelo matemático del sistema mostrado en la figura. Considerar únicamente el movimiento horizontal,
EjerciciosMSS_ Ejercicios de Sistemas Mecánicos Traslación. Dibujar el diagrama de cuerpo libre y obtener el modelo matemático del sistema mostrado en la figura. Considerar únicamente el movimiento horizontal,
A puro. P b, kpa C A1 C A2. 3 m 4 5. Figura 1
 PROBLEMA. Considere el proceso mostrado en la figura. q, q en m 3 s C A, C A, C A3 en gma cc ρ en gm cc h, h, L en m q, ρ P a, kpa q, ρ A puro Reactor P b, kpa C A 3 h C A Tanque de Mezcla L h 3 m 4 5
PROBLEMA. Considere el proceso mostrado en la figura. q, q en m 3 s C A, C A, C A3 en gma cc ρ en gm cc h, h, L en m q, ρ P a, kpa q, ρ A puro Reactor P b, kpa C A 3 h C A Tanque de Mezcla L h 3 m 4 5
GRADO: CURSO: 3 CUATRIMESTRE:
 DENOMINACIÓN ASIGNATURA: Ingeniería de Control I GRADO: CURSO: 3 CUATRIMESTRE: La asignatura tiene 29 sesiones que se distribuyen a lo largo de 14 semanas. Los laboratorios pueden situarse en cualquiera
DENOMINACIÓN ASIGNATURA: Ingeniería de Control I GRADO: CURSO: 3 CUATRIMESTRE: La asignatura tiene 29 sesiones que se distribuyen a lo largo de 14 semanas. Los laboratorios pueden situarse en cualquiera
1. Generalidades Neumática Hidráulica Comparación entre neumática, hidráulica, eléctrica y electrónica...
 Índice 1. Generalidades... 1 1.1 Neumática... 1 1.2 Hidráulica... 2 1.3 Comparación entre neumática, hidráulica, eléctrica y electrónica... 4 2. Actuadores neumáticos... 9 2.1 Generalidades... 9 2.2 Servomotor
Índice 1. Generalidades... 1 1.1 Neumática... 1 1.2 Hidráulica... 2 1.3 Comparación entre neumática, hidráulica, eléctrica y electrónica... 4 2. Actuadores neumáticos... 9 2.1 Generalidades... 9 2.2 Servomotor
AUIN 1314 motor G20. Motores Oleohidráulicos (Hidraulicos) Contingut
 Contingut") Contingut 1 Motores Oleohidráulicos (Hidraulicos) 1.1 Principio básico de funcionamiento 1.2 Tipos de motores hidráulicos 1.2.1 Motores de engranajes y paletas 1.2.2 Motores GeRotor 1.2.3 Motores de pistones
Contingut 1 Motores Oleohidráulicos (Hidraulicos) 1.1 Principio básico de funcionamiento 1.2 Tipos de motores hidráulicos 1.2.1 Motores de engranajes y paletas 1.2.2 Motores GeRotor 1.2.3 Motores de pistones
Calendario de exámenes curso 16/17
 506101001 Matemáticas I GIE 1 A 1-sep. M 506101002 Física I GIE 1 1 14-sep. M 506101003 Química General GIE 1 1 4-sep. M 506101004 Informática Aplicada GIE 1 1 9-sep. M 506101005 Expresión Gráfica GIE
506101001 Matemáticas I GIE 1 A 1-sep. M 506101002 Física I GIE 1 1 14-sep. M 506101003 Química General GIE 1 1 4-sep. M 506101004 Informática Aplicada GIE 1 1 9-sep. M 506101005 Expresión Gráfica GIE
Instrumentación y Control Ejercicios Agosto Diciembre 2017
 Instrumentación y Control Ejercicios gosto Diciembre 7 EJERCICIO daptado de Turton () La figura muestra un fragmento de un diagrama de tuberías e instrumentos (PID) que contiene varios errores. Identificar
Instrumentación y Control Ejercicios gosto Diciembre 7 EJERCICIO daptado de Turton () La figura muestra un fragmento de un diagrama de tuberías e instrumentos (PID) que contiene varios errores. Identificar
INFORMACIÓN IMPORTANTE PARA ALUMNOS DEL DOBLE GRADO
 INFORMACIÓN IMPORTANTE PARA ALUMNOS DEL DOBLE GRADO Aquellos alumnos del Doble Grado: Ingeniería de los Recursos Mineros y Energéticos e Ingeniería Civil que entreguen como TFG un documento conjunto único
INFORMACIÓN IMPORTANTE PARA ALUMNOS DEL DOBLE GRADO Aquellos alumnos del Doble Grado: Ingeniería de los Recursos Mineros y Energéticos e Ingeniería Civil que entreguen como TFG un documento conjunto único
CONTROL PARA LEVITADOR MAGNÉTICO Control Análogo. Presentado Por: Oscar Alejandro Torres Cruz. Álvaro Mauricio Rojas España
 CONTROL PARA LEVITADOR MAGNÉTICO Control Análogo Presentado Por: Oscar Alejandro Torres Cruz Álvaro Mauricio Rojas España Nelson Fabián Gómez Valbuena Diego Felipe Franco Vásquez Presentado a: Ing. Javier
CONTROL PARA LEVITADOR MAGNÉTICO Control Análogo Presentado Por: Oscar Alejandro Torres Cruz Álvaro Mauricio Rojas España Nelson Fabián Gómez Valbuena Diego Felipe Franco Vásquez Presentado a: Ing. Javier
CIDEAD. 2º Bachillerato.3º Trimestre.Tecnología Industrial II Tema 8.- Componentes de un sistema de control.
 Desarrollo del tema. 1. Los componentes de un sistema de control. 2. El regulador. 3. Los transductores y los captadores. 4. Los comparadares. 5. Los actuadores. 1 1. Los componentes de un sistema de control.
Desarrollo del tema. 1. Los componentes de un sistema de control. 2. El regulador. 3. Los transductores y los captadores. 4. Los comparadares. 5. Los actuadores. 1 1. Los componentes de un sistema de control.
GRADO EN INGENIERÍA EN TECNOLOGÍAS INDUSTRIALES
 GRADO EN INGENIERÍA EN TECNOLOGÍAS INDUSTRIALES TABLA DE EQUIVALENCIA DE INGENIERÍA INDUSTRIAL A GRADO EN INGENIERÍA EN TECNOLOGÍAS INDUSTRIALES CÓDIGO ASIGNATURAS INGENIERO INDUSTRIAL 2001 (52) ASIGNATURAS
GRADO EN INGENIERÍA EN TECNOLOGÍAS INDUSTRIALES TABLA DE EQUIVALENCIA DE INGENIERÍA INDUSTRIAL A GRADO EN INGENIERÍA EN TECNOLOGÍAS INDUSTRIALES CÓDIGO ASIGNATURAS INGENIERO INDUSTRIAL 2001 (52) ASIGNATURAS
IQ57A: Dinámica y control de procesos Capítulo 2: Sistemas de alto orden
 IQ57A: Dinámica y control de procesos Capítulo 2: J. Cristian Salgado - jsalgado@ing.uchile.cl Departamento de Ingeniería Química y Biotecnología, Universidad de Chile August 31, 2008 Objetivos Al final
IQ57A: Dinámica y control de procesos Capítulo 2: J. Cristian Salgado - jsalgado@ing.uchile.cl Departamento de Ingeniería Química y Biotecnología, Universidad de Chile August 31, 2008 Objetivos Al final
GRADO EN INGENIERÍA EN TECNOLOGÍAS INDUSTRIALES
 GRADO EN INGENIERÍA EN TECNOLOGÍAS INDUSTRIALES TABLA DE EQUIVALENCIA DE INGENIERÍA INDUSTRIAL A GRADO EN INGENIERÍA EN TECNOLOGÍAS INDUSTRIALES CÓDIGO ASIGNATURAS INGENIERO INDUSTRIAL 2001 (52) ASIGNATURAS
GRADO EN INGENIERÍA EN TECNOLOGÍAS INDUSTRIALES TABLA DE EQUIVALENCIA DE INGENIERÍA INDUSTRIAL A GRADO EN INGENIERÍA EN TECNOLOGÍAS INDUSTRIALES CÓDIGO ASIGNATURAS INGENIERO INDUSTRIAL 2001 (52) ASIGNATURAS
PRÁCTICA CICLO DE POTENCIA DE GAS (BRAYTON)
") UNIVERSIDAD NACIONAL EXPERIMENTAL ``FRANCISCO DE MIRANDA ÁREA DE TECNOLOGÍA PROGRAMA DE INGENIERÍA INDUSTRIAL, MECÁNICA LABORATORIO DE TERMODINÁMICA APLICADA. LABORATORIO DE CONVERSIÓN DE ENERGÍA PRÁCTICA
UNIVERSIDAD NACIONAL EXPERIMENTAL ``FRANCISCO DE MIRANDA ÁREA DE TECNOLOGÍA PROGRAMA DE INGENIERÍA INDUSTRIAL, MECÁNICA LABORATORIO DE TERMODINÁMICA APLICADA. LABORATORIO DE CONVERSIÓN DE ENERGÍA PRÁCTICA
Sistema de mezcla con quemador
 EUITI-UPM Dpto. Electrónica Automática e Informática Industrial. Título: Sistema de mezcla con quemador Trabajo de Control de Procesos: 1 1. Descripción del sistema La figura representa un sistema mezclador
EUITI-UPM Dpto. Electrónica Automática e Informática Industrial. Título: Sistema de mezcla con quemador Trabajo de Control de Procesos: 1 1. Descripción del sistema La figura representa un sistema mezclador
01/07/2009. Ecuaciones dinámicas del motor. Fig. 1 circuito equivalente del motor de CD con excitación independiente.
 Control de Máquinas Eléctricas Primavera 2009 1. Análisis vectorial de sistema trifásicos 1. Campo magnético 2. Devanado trifásico 3. Vector espacial de un sistema de corrientes 4. Representación gráfica
Control de Máquinas Eléctricas Primavera 2009 1. Análisis vectorial de sistema trifásicos 1. Campo magnético 2. Devanado trifásico 3. Vector espacial de un sistema de corrientes 4. Representación gráfica
Tema 2: Representación y modelado de sistemas dinámicos
 Fundamentos de Control Automático 2º G. Ing. Tecn. Industrial Tema 2: Representación y modelado de sistemas dinámicos Índice del tema Tema 2: Representación y modelado de sistemas dinámicos 2. Señales
Fundamentos de Control Automático 2º G. Ing. Tecn. Industrial Tema 2: Representación y modelado de sistemas dinámicos Índice del tema Tema 2: Representación y modelado de sistemas dinámicos 2. Señales
Calendario de exámenes curso 16/17 Convocatoria de junio
 506101001 Matemáticas I GIE 1 A 13-jun. M 506101002 Física I GIE 1 1 4-jul. M 506101003 Química General GIE 1 1 15-jun. M 506101004 Informática Aplicada GIE 1 1 22-jun. M 506101005 Expresión Gráfica GIE
506101001 Matemáticas I GIE 1 A 13-jun. M 506101002 Física I GIE 1 1 4-jul. M 506101003 Química General GIE 1 1 15-jun. M 506101004 Informática Aplicada GIE 1 1 22-jun. M 506101005 Expresión Gráfica GIE
CONCEPTOS. Concepto de Sistema. Arreglo de elementos conectados o relacionados entre sí de tal manera que forman y/o actúen como una unidad entera.
 CONCEPTOS Concepto de Sistema. Arreglo de elementos conectados o relacionados entre sí de tal manera que forman y/o actúen como una unidad entera. Concepto de Sistema de Control. Interacción de componentes
CONCEPTOS Concepto de Sistema. Arreglo de elementos conectados o relacionados entre sí de tal manera que forman y/o actúen como una unidad entera. Concepto de Sistema de Control. Interacción de componentes
EQUIVALENCIAS ENTRE GRADOS DE LA ETS INGENIEROS INDUSTRIALES
 EQUIVALENCIAS ENTRE GRADOS DE LA ETS INGENIEROS INDUSTRIALES INGENIERÍA EN ELECTRÓNICA INGENIERÍA ELÉCTRICA INDUSTRIAL Y AUTOMÁTICA ASIGNATURAS DE FORMACIÓN BÁSICA INGENIERÍA MECÁNICA INGENIERÍA EN TECNOLOGÍAS
EQUIVALENCIAS ENTRE GRADOS DE LA ETS INGENIEROS INDUSTRIALES INGENIERÍA EN ELECTRÓNICA INGENIERÍA ELÉCTRICA INDUSTRIAL Y AUTOMÁTICA ASIGNATURAS DE FORMACIÓN BÁSICA INGENIERÍA MECÁNICA INGENIERÍA EN TECNOLOGÍAS
Especificaciones técnicas
 Especificaciones técnicas Electroválvulas proporcionales servoaccionadas de 2 vías Agosto 2000 DKACV.PD.300.C2.05 520B0629 2 DKACV.PD.300.C2.05 ã Danfoss A/S 08-2000 Desactivada cerrada Electroválvula
Especificaciones técnicas Electroválvulas proporcionales servoaccionadas de 2 vías Agosto 2000 DKACV.PD.300.C2.05 520B0629 2 DKACV.PD.300.C2.05 ã Danfoss A/S 08-2000 Desactivada cerrada Electroválvula
FORMATO CONTENIDO DE CURSO O SÍLABO
 1. INFORMACIÓN GENERAL DEL CURSO Facultad Ingeniería Fecha de Actualización 20/03/2017 Programa Ingeniería Química Semestre IX Nombre Modelamiento, Control y Simulación de procesos químicos Código 72745
1. INFORMACIÓN GENERAL DEL CURSO Facultad Ingeniería Fecha de Actualización 20/03/2017 Programa Ingeniería Química Semestre IX Nombre Modelamiento, Control y Simulación de procesos químicos Código 72745
PROYECTO DE CURSO DE LA ASIGNATURA TEORÍA DE CONTROL AUTOMÁTICO PRIMER PARCIAL 3 er CURSO Ingeniería de Telecomunicaciones Curso
 PROYECTO DE CURSO DE LA ASIGNATURA TEORÍA DE CONTROL AUTOMÁTICO PRIMER PARCIAL 3 er CURSO Ingeniería de Telecomunicaciones Curso 2010-11 1. Descripción del sistema Se desea controlar la reacción química
PROYECTO DE CURSO DE LA ASIGNATURA TEORÍA DE CONTROL AUTOMÁTICO PRIMER PARCIAL 3 er CURSO Ingeniería de Telecomunicaciones Curso 2010-11 1. Descripción del sistema Se desea controlar la reacción química
INTRODUCCIÓN A LA REPRESENTACIÓN DE SISTEMAS FÍSICOS
 TEMA. FUNCIONES DE TRANSFERENCIA DE SISTEMAS FÍSICOS CONTENIDO INTRODUCCIÓN A LA REPRESENTACIÓN DE SISTEMAS FÍSICOS SISTEMAS MECÁNICOS SISTEMAS ELÉCTRICOS SISTEMAS ELECTROMECÁNICOS: MOTORES Y GENERADORES
TEMA. FUNCIONES DE TRANSFERENCIA DE SISTEMAS FÍSICOS CONTENIDO INTRODUCCIÓN A LA REPRESENTACIÓN DE SISTEMAS FÍSICOS SISTEMAS MECÁNICOS SISTEMAS ELÉCTRICOS SISTEMAS ELECTROMECÁNICOS: MOTORES Y GENERADORES
Implementacion de un sistema de riego automático para cuidado de flores
 Implementacion de un sistema de riego automático para cuidado de flores Juan Camilo Baquero - Julian Alexander Martinez - Alexei Fernandez {jc.baquero10, ja.martinez143, ao.fernandez10}@uniandes.edu.co
Implementacion de un sistema de riego automático para cuidado de flores Juan Camilo Baquero - Julian Alexander Martinez - Alexei Fernandez {jc.baquero10, ja.martinez143, ao.fernandez10}@uniandes.edu.co
Función de Transferencia en dispositivos eléctricos. Taller de Construcción de Efectos, U2 Sesión 1
 Función de Transferencia en dispositivos eléctricos Taller de Construcción de Efectos, U2 Sesión 1 Definición La Función de Transferencia de un sistema es una expresión matemática que relaciona la salida
Función de Transferencia en dispositivos eléctricos Taller de Construcción de Efectos, U2 Sesión 1 Definición La Función de Transferencia de un sistema es una expresión matemática que relaciona la salida
Modelado y simulación de un proceso de nivel
 Modelado y simulación de un proceso de nivel Carlos Gaviria Febrero 14, 2007 Introduction El propósito de este sencillo ejercicio es el de familiarizar al estudiante con alguna terminología del control
Modelado y simulación de un proceso de nivel Carlos Gaviria Febrero 14, 2007 Introduction El propósito de este sencillo ejercicio es el de familiarizar al estudiante con alguna terminología del control
Tema 1. Introducción a los sistemas de control Un poco de historia
 Un poco de historia Control clásico El diseño de sistemas de control durante la Revolución Industrial estaba basado en prueba y error unido con una gran dosis de intuición ingenieril. A mediados de la
Un poco de historia Control clásico El diseño de sistemas de control durante la Revolución Industrial estaba basado en prueba y error unido con una gran dosis de intuición ingenieril. A mediados de la
UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID
 UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBA DE ACCESO A ESTUDIOS UNIVERSITARIOS (LOGSE) Curso 2005-2006 MATERIA: TECNOLOGÍAINDUSTRIAL II 6 INSTRUCCIONES GENERALES Y VALORACIÓN Estructura de
UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBA DE ACCESO A ESTUDIOS UNIVERSITARIOS (LOGSE) Curso 2005-2006 MATERIA: TECNOLOGÍAINDUSTRIAL II 6 INSTRUCCIONES GENERALES Y VALORACIÓN Estructura de