INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA UNIDAD CULHUACÁN INTEGRANTES
|
|
|
- Montserrat Acosta Gil
- hace 8 años
- Vistas:
Transcripción
1 INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA UNIDAD CULHUACÁN INTEGRANTES CÁRDENAS ESPINOSA CÉSAR OCTAVIO racsec_05@hotmail.com Boleta: CASTILLO GUTIÉRREZ EDUARDO edd_012@hotmail.com Boleta: MORENO SÁENZ JAIRO jsaenz_7@hotmail.com Boleta: GRUPO: LA VARIABLE MATRIZ ESTRUCTURA Y BASES DE DATOS ING. JESÚS RODRÍGUEZ BUENDÍA 1 P á g i n a

2 INTRODUCCIÓN C++ es un lenguaje de programación que surgió con la intención de extender el lenguaje de programación C a la manipulación de objetos, sumando con esto dos paradigmas de programación que maneja este lenguaje: Programación Estructurada y la Programación Orientada a Objetos. C++ tiene tipos de datos fundamentales del lenguaje, los cuales pueden manejar caracteres, números enteros, números de punto flotante, e incluso, usando arreglos de tipo char, guardar texto; Pero en C++ también es posible definir nuestros propios datos, a esto se le llama tipos de datos agregados o definidos por el usuario, entre los que podemos mencionar struct y class. Podemos definir a las clases como declaraciones o abstracciones de objetos, lo que significa, que una clase es la definición de un objeto. Dentro de la clase, se encuentran uno o más datos (llamados atributos), y funciones (llamados métodos) que permiten la manipulación de los atributos. Retomando la idea de los tipos de datos y de la cual será esta propuesta, hablaremos de una variable de gran utilidad en el campo de las matemáticas y la ingeniería, la variable MATRIZ definida con class. 2 P á g i n a

3 OBJETIVO Crear una variable llamada matriz, la cual será capaz de reconocer el álgebra de las matrices y poder efectuar sus operaciones usando operadores de C++, además de guardar su declaración en un archivo header (<matriz.h>) que solo con agregarlo al código se pueda acceder a todas las funciones disponibles MATRIZ. Es un arreglo rectangular de números que consta de m renglones por n columnas (mxn). Las matrices son utilizadas para escribir sistemas de ecuaciones lineales, existe también el álgebra de matrices, en el cual se afirma que pueden sumarse, restarse, multiplicarse, entre otras operaciones que veremos más adelante. Aunque existen herramientas en C++ con las cuales podríamos trabajar matrices, como el uso de arreglos bidimensionales, son complicadas de manipular ya que no se podría sumar dos matrices usando el operador +, puesto que no son datos fundamentales. Por lo tanto, definimos una clase llamada matriz con todos estos métodos para hacer más eficaz el uso de esta variable. 3 P á g i n a

4 A continuación veremos la declaración de la variable matriz, la cual se encuentra en un archivo header, cuyo nombre es matriz.h y cuando se desee usar una variable de este tipo de dato agregado, solo se debe agregar en las directivas del preprocesador #include matriz.h. Cabe mencionar que es común usar < > para el nombre del archivo, pero para nuestra variable usaremos, la diferencia se encuentra en que el uso de paréntesis angulares significa que los archivos se encuentran en la carpeta default (la carpeta include), mientras que con las comillas se busca en el directorio del proyecto. 4 P á g i n a
, mientras que con las comillas se busca en el directorio")
5 Es importante decir que las definiciones de la clase no se muestran en esta propuesta, ya que el archivo es compilado (traducido a lenguaje de maquina). Ahora, nos enfocaremos a hablar de las operaciones que se pueden realizar con las matrices, así como su respectiva función en C++ con la clase que se definió. SUMA Y RESTA DE MATRICES Si A y B son matrices del mismo tamaño entonces la suma A+B es la matriz obtenida al sumar los elementos de A con los elementos correspondientes de B, y la diferencia A-B es la matriz que se obtiene de restar cada elemento de A con sur respectivo elemento en B. No es posible sumar o restar matrices de tamaños diferentes. Para realizar estas operaciones en C++, usamos el operador + para realizar la suma y el operador para realizar la sustracción. Veamos un ejemplo: 5 P á g i n a

6 Si las condiciones para la suma y la resta no se cumplen, es imposible realizar la operación 6 P á g i n a

7 MULTIPLICACIÓN DE MATRICES Para poder realizar la multiplicación de dos matrices, se debe cumplir con la siguiente condición: el número de columnas de la matriz A sean iguales al número de renglones de la matriz B, de lo contrario es imposible multiplicarlas: Para realizar esta operación en C++, usamos el operador *. Veamos un ejemplo: 7 P á g i n a

8 Si la condición no se cumple, es imposible realizar la operación: MULTIPLICACIÓN DE UNA MATRIZ POR UN ESCALAR Sea A una matriz, c un escalar, el producto ca se calcula multiplicando cada miembro de la matriz por el escalar. Para esta operación usamos de nueva cuenta el operador *, colocando primero el nombre de la variable matriz y después el nombre de la variable escalar (double). Veamos un ejemplo: 8 P á g i n a

9 MATRIZ TRANSPUESTA La transpuesta de una matriz A mxn es la matriz nxm A T formada al intercambiar las filas y columnas. 9 P á g i n a

10 Para realizar esta operación, utilizamos en C++ el operador! Veamos un ejemplo: MATRIZ INVERSA Sea A una matriz cuadrada (una matriz que tiene el mismo número de renglones que de columnas), se dice que A -1 es su matriz inversa si al realizar el producto A A -1 da como resultado la matriz identidad I (matriz conformada por ceros, y cuya diagonal principal contiene 1). Para realizar esta operación usamos el operador ~. Veamos un ejemplo: 10 P á g i n a
.")
11 Usando la matriz inversa, es posible resolver un sistema de ecuaciones, usando ecuaciones matriciales de la forma: 11 P á g i n a

12 Veamos un ejemplo de este método. Resolver el sistema de ecuaciones: Si hacemos una matriz columna con los términos independientes del sistema y la multiplicamos por la matriz inversa de los coeficientes del sistema, podremos calcular las soluciones de las ecuaciones simultáneas: 12 P á g i n a

13 REDUCCIÓN GAUSS-JORDAN El método de Gauss-Jordan sirve para resolver sistemas de ecuaciones lineales, utilizando la matriz aumentada del sistema, realizando operaciones básicas para hacer ceros y dejar unos en la diagonal principal. Matriz Aumentada Reducción de Gauss-Jordan Donde son las soluciones del sistema. Para realizar esta reducción, usamos la función gauss( ) que se encuentra dentro de la clase, por lo tanto: void matriz.gauss( ); 13 P á g i n a
 que se encuentra dentro de la clase, por lo tanto: void")
14 Veamos un ejemplo: DETERMINANTE Sea A una matriz cuadrada, se define la función determinante de la siguiente manera: Para un determinante 2x2 14 P á g i n a

15 Para un determinante 3x3 Para un determinante de orden 4 o mayor El determinante de orden n, puede desarrollarse a partir de una fila o columna, reduciendo el problema al cálculo de un determinante de orden n-1. Para ello se toma una fila o columna cualquiera, multiplicando cada elemento por su adjunto (es decir, el determinante de la matriz que se obtiene eliminando la fila y columna correspondiente a dicho elemento, multiplicado por (-1) i+j donde i es el número de fila y j el número de columna). La suma de todos los productos es igual al determinante. Para realizar esta operación, se utiliza la función det( ), que se encuentra dentro de la clase. double matriz.det( ); Veamos un ejemplo: 15 P á g i n a
 i+j donde i es el número de fila y j el número de columna). La suma de todos los productos es igual al determinante.")
16 Una aplicación de los determinantes es el cálculo del área de un triangulo conociendo las coordenadas de sus vértices, de la siguiente manera: Tomando cualquier vértice y de ahí el siguiente en sentido contrario de las manecillas del reloj. Veamos el siguiente ejemplo: Calcular el área del siguiente triángulo 16 P á g i n a

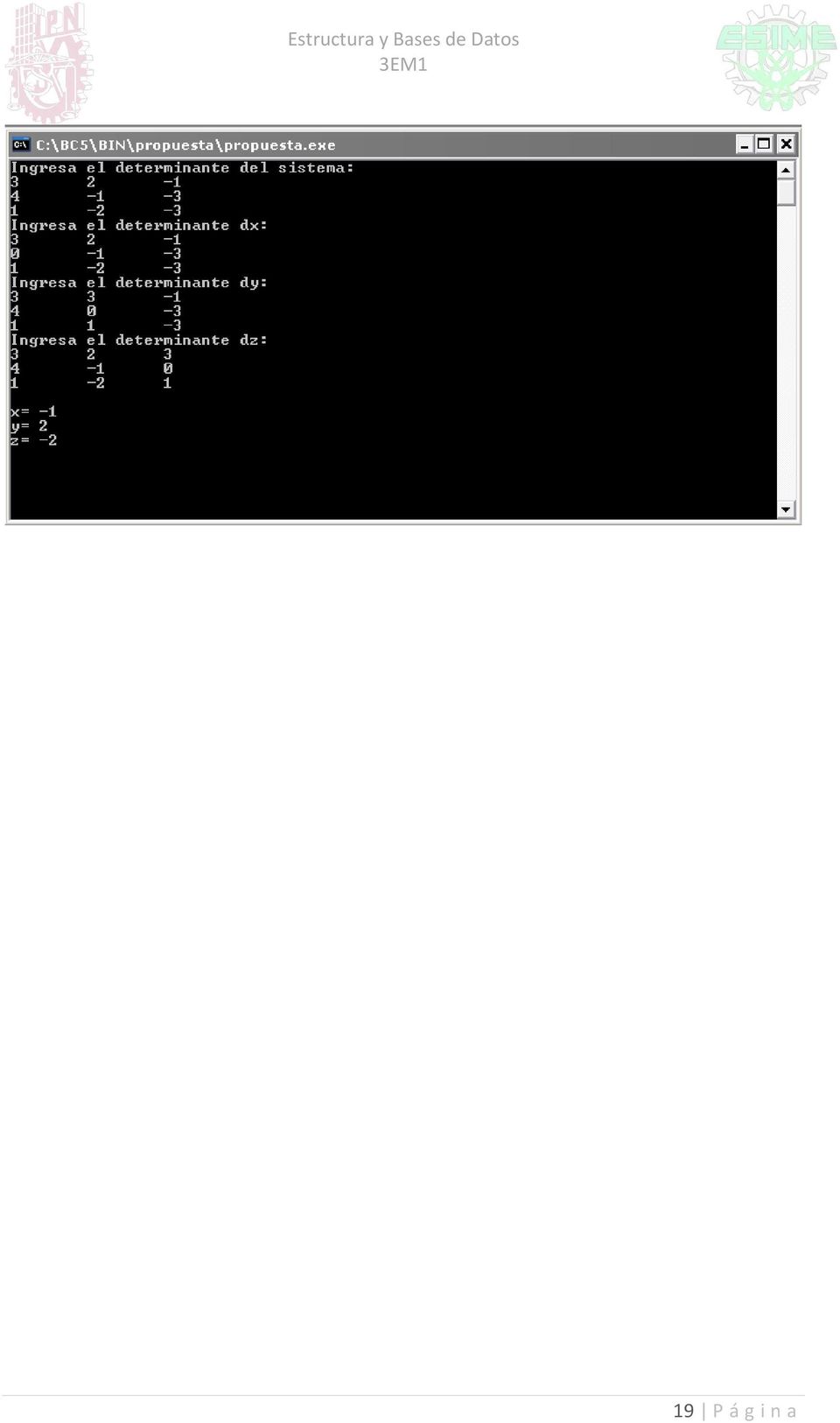
17 Es muy fácil e demostrar que el área es correcta, pues la base mide 5, la altura es de 4, y tomando la fórmula del área Otro uso de los determinantes, al igual que las matrices, es resolver sistemas de ecuaciones lineales. Veamos el ejemplo: Resolver es sistema Encontraremos las soluciones usando la regla de Cramer, primero calcularemos el determinante del sistema, que es el determinante de la matriz de los coeficientes. Después calcularemos los determinantes, que se calculan sustituyendo de la matriz de los coeficientes, la columna respectiva x, y z por los términos independientes 17 P á g i n a

18 Teniendo las soluciones: 18 P á g i n a

19 19 P á g i n a
20 CONCLUSIONES Como ya se ha mencionada el lenguaje de programación C++ es muy poderoso y sobretodo es muy útil para nosotros los estudiantes de ingeniería, ya que con el se pueden crear muchas herramientas útiles para la resolución de problemas. Una de las tantas aplicaciones que se pueden crear con el lenguaje C++ es la Variable Matriz, la cual nos servirá para resolver un sistema de n número de ecuaciones con n numero de incógnitas, se podrán realizar desde sumas y restas hasta la denominada matriz inversa, esto utilizando el algebra de matrices y algunos otros procesos matemáticos aprendidos previamente, tales como la reducción Gauss- Jordan. Enfocándonos más hacia lo que es este proyecto y su aplicación práctica se pude decir que sería muy útil para la resolución de problemas ya que acortaría el tiempo de resolución de ecuación u operaciones que en algún momento sean de un desarrollo demasiado largo, así los programas efectuarían todo el trabajo y nos entregaría un resultado directo y confiable. También, esta variable puede servir de base para algunas otras operaciones (como divergencia, rotacional, jacobiano) pero agregando otras herramientas de derivación, con esto se podrían crear los fundamentos para una calculadora, la cual podría además de tener estas variables, otras muy poderosas y útiles (como variable complejo, variable vector). 20 P á g i n a

Matrices. Definiciones básicas de matrices. www.math.com.mx. José de Jesús Angel Angel. jjaa@math.com.mx
 Matrices Definiciones básicas de matrices wwwmathcommx José de Jesús Angel Angel jjaa@mathcommx MathCon c 2007-2008 Contenido 1 Matrices 2 11 Matrices cuadradas 3 12 Matriz transpuesta 4 13 Matriz identidad
Matrices Definiciones básicas de matrices wwwmathcommx José de Jesús Angel Angel jjaa@mathcommx MathCon c 2007-2008 Contenido 1 Matrices 2 11 Matrices cuadradas 3 12 Matriz transpuesta 4 13 Matriz identidad
Matrices Invertibles y Elementos de Álgebra Matricial
 Matrices Invertibles y Elementos de Álgebra Matricial Departamento de Matemáticas, CCIR/ITESM 12 de enero de 2011 Índice 91 Introducción 1 92 Transpuesta 1 93 Propiedades de la transpuesta 2 94 Matrices
Matrices Invertibles y Elementos de Álgebra Matricial Departamento de Matemáticas, CCIR/ITESM 12 de enero de 2011 Índice 91 Introducción 1 92 Transpuesta 1 93 Propiedades de la transpuesta 2 94 Matrices
Matrices: Conceptos y Operaciones Básicas
 Matrices: Conceptos y Operaciones Básicas Departamento de Matemáticas, CCIR/ITESM 8 de septiembre de 010 Índice 111 Introducción 1 11 Matriz 1 113 Igualdad entre matrices 11 Matrices especiales 3 115 Suma
Matrices: Conceptos y Operaciones Básicas Departamento de Matemáticas, CCIR/ITESM 8 de septiembre de 010 Índice 111 Introducción 1 11 Matriz 1 113 Igualdad entre matrices 11 Matrices especiales 3 115 Suma
Capitán de fragata ingeniero AGUSTÍN E. GONZÁLEZ MORALES. ÁLGEBRA PARA INGENIEROS (Solucionario)
") Capitán de fragata ingeniero AGUSTÍN E. GONZÁLEZ MORALES ÁLGEBRA PARA INGENIEROS (Solucionario) 2 Í N D I C E CAPÍTULO : MATRICES, DETERMINANTES Y SISTEMAS DE ECUACIONES LINEALES CAPÍTULO 2: ESPACIOS VECTORIALES
Capitán de fragata ingeniero AGUSTÍN E. GONZÁLEZ MORALES ÁLGEBRA PARA INGENIEROS (Solucionario) 2 Í N D I C E CAPÍTULO : MATRICES, DETERMINANTES Y SISTEMAS DE ECUACIONES LINEALES CAPÍTULO 2: ESPACIOS VECTORIALES
RESOLUCIÓN DE SISTEMAS DE ECUACIONES LINEALES
 RESOLUCIÓN DE SISTEMAS DE ECUACIONES LINEALES 1 La ecuación 2x - 3 = 0 se llama ecuación lineal de una variable. Obviamente sólo tiene una solución. La ecuación -3x + 2y = 7 se llama ecuación lineal de
RESOLUCIÓN DE SISTEMAS DE ECUACIONES LINEALES 1 La ecuación 2x - 3 = 0 se llama ecuación lineal de una variable. Obviamente sólo tiene una solución. La ecuación -3x + 2y = 7 se llama ecuación lineal de
Sistemas de Ecuaciones Lineales y Matrices
 Sistemas de Ecuaciones Lineales y Matrices Oscar G Ibarra-Manzano, DSc Departamento de Area Básica - Tronco Común DES de Ingenierías Facultad de Ingeniería, Mecánica, Eléctrica y Electrónica Trimestre
Sistemas de Ecuaciones Lineales y Matrices Oscar G Ibarra-Manzano, DSc Departamento de Area Básica - Tronco Común DES de Ingenierías Facultad de Ingeniería, Mecánica, Eléctrica y Electrónica Trimestre
Definición 1.1.1. Dados dos números naturales m y n, una matriz de orden o dimensión m n es una tabla numérica rectangular con m filas y n columnas.
 Tema 1 Matrices Estructura del tema. Conceptos básicos y ejemplos Operaciones básicas con matrices Método de Gauss Rango de una matriz Concepto de matriz regular y propiedades Determinante asociado a una
Tema 1 Matrices Estructura del tema. Conceptos básicos y ejemplos Operaciones básicas con matrices Método de Gauss Rango de una matriz Concepto de matriz regular y propiedades Determinante asociado a una
ÁLGEBRA DE MATRICES. Al consejero A no le gusta ninguno de sus colegas como presidente.
 ÁLGEBRA DE MATRICES Página 49 REFLEXIONA Y RESUELVE Elección de presidente Ayudándote de la tabla, estudia detalladamente los resultados de la votación, analiza algunas características de los participantes
ÁLGEBRA DE MATRICES Página 49 REFLEXIONA Y RESUELVE Elección de presidente Ayudándote de la tabla, estudia detalladamente los resultados de la votación, analiza algunas características de los participantes
Subespacios vectoriales en R n
 Subespacios vectoriales en R n Víctor Domínguez Octubre 2011 1. Introducción Con estas notas resumimos los conceptos fundamentales del tema 3 que, en pocas palabras, se puede resumir en técnicas de manejo
Subespacios vectoriales en R n Víctor Domínguez Octubre 2011 1. Introducción Con estas notas resumimos los conceptos fundamentales del tema 3 que, en pocas palabras, se puede resumir en técnicas de manejo
Lección 24: Lenguaje algebraico y sustituciones
 LECCIÓN Lección : Lenguaje algebraico y sustituciones En lecciones anteriores usted ya trabajó con ecuaciones. Las ecuaciones expresan una igualdad entre ciertas relaciones numéricas en las que se desconoce
LECCIÓN Lección : Lenguaje algebraico y sustituciones En lecciones anteriores usted ya trabajó con ecuaciones. Las ecuaciones expresan una igualdad entre ciertas relaciones numéricas en las que se desconoce
Matrices equivalentes. El método de Gauss
 Matrices equivalentes. El método de Gauss Dada una matriz A cualquiera decimos que B es equivalente a A si podemos transformar A en B mediante una combinación de las siguientes operaciones: Multiplicar
Matrices equivalentes. El método de Gauss Dada una matriz A cualquiera decimos que B es equivalente a A si podemos transformar A en B mediante una combinación de las siguientes operaciones: Multiplicar
Aplicaciones Lineales
 Aplicaciones Lineales Ejercicio Dada la matriz A = 0 2 0 a) Escribir explícitamente la aplicación lineal f : 2 cuya matriz asociada con respecto a las bases canónicas es A. En primer lugar definimos las
Aplicaciones Lineales Ejercicio Dada la matriz A = 0 2 0 a) Escribir explícitamente la aplicación lineal f : 2 cuya matriz asociada con respecto a las bases canónicas es A. En primer lugar definimos las
1. INVERSA DE UNA MATRIZ REGULAR
 . INVERSA DE UNA MATRIZ REGULAR Calcular la inversa de una matriz regular es un trabajo bastante tedioso. A través de ejemplos se expondrán diferentes técnicas para calcular la matriz inversa de una matriz
. INVERSA DE UNA MATRIZ REGULAR Calcular la inversa de una matriz regular es un trabajo bastante tedioso. A través de ejemplos se expondrán diferentes técnicas para calcular la matriz inversa de una matriz
Tema 3: Vectores y matrices. Conceptos básicos
 Tema : Vectores matrices. Conceptos básicos 1. Definición Matlab está fundamentalmente orientado al trabajo el cálculo matricial. Veremos que las operaciones están definidas para el trabajo con este tipo
Tema : Vectores matrices. Conceptos básicos 1. Definición Matlab está fundamentalmente orientado al trabajo el cálculo matricial. Veremos que las operaciones están definidas para el trabajo con este tipo
Cálculo científico y técnico con HP49g/49g+/48gII/50g Módulo 3 Aplicaciones Tema 3.3 Sistemas de ecuaciones lineales: regla de Cramer
 Cálculo científico y técnico con HP49g/49g+/48gII/50g Módulo 3 Aplicaciones Tema 3.3 Sistemas de ecuaciones lineales: regla de Cramer Francisco Palacios Escuela Politécnica Superiror de Ingeniería Manresa
Cálculo científico y técnico con HP49g/49g+/48gII/50g Módulo 3 Aplicaciones Tema 3.3 Sistemas de ecuaciones lineales: regla de Cramer Francisco Palacios Escuela Politécnica Superiror de Ingeniería Manresa
MATEMÁTICAS BÁSICAS UNIVERSIDAD NACIONAL DE COLOMBIA - SEDE MEDELLÍN CLASES # 13 y #14
 MATEMÁTICAS BÁSICAS UNIVERSIDAD NACIONAL DE COLOMBIA - SEDE MEDELLÍN CLASES # 3 y #4 Desigualdades Al inicio del Capítulo 3, estudiamos las relaciones de orden en los número reales y el signi cado de expresiones
MATEMÁTICAS BÁSICAS UNIVERSIDAD NACIONAL DE COLOMBIA - SEDE MEDELLÍN CLASES # 3 y #4 Desigualdades Al inicio del Capítulo 3, estudiamos las relaciones de orden en los número reales y el signi cado de expresiones
Nota 1. Los determinantes de orden superior a 3 se calculan aplicando las siguientes propiedades:
 Capítulo 1 DETERMINANTES Definición 1 (Matriz traspuesta) Llamaremos matriz traspuesta de A = (a ij ) a la matriz A t = (a ji ); es decir la matriz que consiste en poner las filas de A como columnas Definición
Capítulo 1 DETERMINANTES Definición 1 (Matriz traspuesta) Llamaremos matriz traspuesta de A = (a ij ) a la matriz A t = (a ji ); es decir la matriz que consiste en poner las filas de A como columnas Definición
21.1.2. TEOREMA DE DETERMINACIÓN DE APLICACIONES LINEALES
 Aplicaciones lineales. Matriz de una aplicación lineal 2 2. APLICACIONES LINEALES. MATRIZ DE UNA APLICACIÓN LINEAL El efecto que produce el cambio de coordenadas sobre una imagen situada en el plano sugiere
Aplicaciones lineales. Matriz de una aplicación lineal 2 2. APLICACIONES LINEALES. MATRIZ DE UNA APLICACIÓN LINEAL El efecto que produce el cambio de coordenadas sobre una imagen situada en el plano sugiere
Qué son los monomios?
 Qué son los monomios? Recordemos qué es una expresión algebraica. Definición Una expresión algebraica es aquella en la que se utilizan letras, números y signos de operaciones. Si se observan las siguientes
Qué son los monomios? Recordemos qué es una expresión algebraica. Definición Una expresión algebraica es aquella en la que se utilizan letras, números y signos de operaciones. Si se observan las siguientes
Espacios generados, dependencia lineal y bases
 Espacios generados dependencia lineal y bases Departamento de Matemáticas CCIR/ITESM 14 de enero de 2011 Índice 14.1. Introducción............................................... 1 14.2. Espacio Generado............................................
Espacios generados dependencia lineal y bases Departamento de Matemáticas CCIR/ITESM 14 de enero de 2011 Índice 14.1. Introducción............................................... 1 14.2. Espacio Generado............................................
Modulo 1 El lenguaje Java
 Modulo 1 El lenguaje Java 13 - Codificación en Java Una de las grandes diferencias entre Java y Pascal en cuando a la codificación es que Java se trata de un lenguaje de los llamados case sensitive Esto
Modulo 1 El lenguaje Java 13 - Codificación en Java Una de las grandes diferencias entre Java y Pascal en cuando a la codificación es que Java se trata de un lenguaje de los llamados case sensitive Esto
Los polinomios. Un polinomio es una expresión algebraica con una única letra, llamada variable. Ejemplo: 9x 6 3x 4 + x 6 polinomio de variable x
 Los polinomios Los polinomios Un polinomio es una expresión algebraica con una única letra, llamada variable. Ejemplo: 9x 6 3x 4 + x 6 polinomio de variable x Elementos de un polinomio Los términos: cada
Los polinomios Los polinomios Un polinomio es una expresión algebraica con una única letra, llamada variable. Ejemplo: 9x 6 3x 4 + x 6 polinomio de variable x Elementos de un polinomio Los términos: cada
UNIDAD 6. POLINOMIOS CON COEFICIENTES ENTEROS
 UNIDAD 6. POLINOMIOS CON COEFICIENTES ENTEROS Unidad 6: Polinomios con coeficientes enteros. Al final deberás haber aprendido... Expresar algebraicamente enunciados sencillos. Extraer enunciados razonables
UNIDAD 6. POLINOMIOS CON COEFICIENTES ENTEROS Unidad 6: Polinomios con coeficientes enteros. Al final deberás haber aprendido... Expresar algebraicamente enunciados sencillos. Extraer enunciados razonables
Una desigualdad se obtiene al escribir dos expresiones numéricas o algebraicas relacionadas con alguno de los símbolos
 MATEMÁTICAS BÁSICAS DESIGUALDADES DESIGUALDADES DE PRIMER GRADO EN UNA VARIABLE La epresión a b significa que "a" no es igual a "b ". Según los valores particulares de a de b, puede tenerse a > b, que
MATEMÁTICAS BÁSICAS DESIGUALDADES DESIGUALDADES DE PRIMER GRADO EN UNA VARIABLE La epresión a b significa que "a" no es igual a "b ". Según los valores particulares de a de b, puede tenerse a > b, que
VECTORES EN EL ESPACIO. 1. Determina el valor de t para que los vectores de coordenadas sean linealmente dependientes.
 VECTORES EN EL ESPACIO. Determina el valor de t para que los vectores de coordenadas (,, t), 0, t, t) y(, 2, t) sean linealmente dependientes. Si son linealmente dependientes, uno de ellos, se podrá expresar
VECTORES EN EL ESPACIO. Determina el valor de t para que los vectores de coordenadas (,, t), 0, t, t) y(, 2, t) sean linealmente dependientes. Si son linealmente dependientes, uno de ellos, se podrá expresar
EXPRESIONES ALGEBRAICAS. POLINOMIOS
 EXPRESIONES ALGEBRAICAS. POLINOMIOS 1. EXPRESIONES ALGEBRAICAS. Estas expresiones del área son expresiones algebraicas, ya que además de números aparecen letras. Son también expresiones algebraicas: bac,
EXPRESIONES ALGEBRAICAS. POLINOMIOS 1. EXPRESIONES ALGEBRAICAS. Estas expresiones del área son expresiones algebraicas, ya que además de números aparecen letras. Son también expresiones algebraicas: bac,
3.- DETERMINANTES. a 11 a 22 a 12 a 21
 3.- DETERMINANTES. 3.1. -DEFINICIÓN Dada una matriz cuadrada de orden n, se llama determinante de esta matriz (y se representa por A o deta al polinomio cuyos términos son todos los productos posibles
3.- DETERMINANTES. 3.1. -DEFINICIÓN Dada una matriz cuadrada de orden n, se llama determinante de esta matriz (y se representa por A o deta al polinomio cuyos términos son todos los productos posibles
Objetivos: Al inalizar la unidad, el alumno:
 Unidad 7 transformaciones lineales Objetivos: Al inalizar la unidad, el alumno: Comprenderá los conceptos de dominio e imagen de una transformación. Distinguirá cuándo una transformación es lineal. Encontrará
Unidad 7 transformaciones lineales Objetivos: Al inalizar la unidad, el alumno: Comprenderá los conceptos de dominio e imagen de una transformación. Distinguirá cuándo una transformación es lineal. Encontrará
NÚMEROS NATURALES Y NÚMEROS ENTEROS
 NÚMEROS NATURALES Y NÚMEROS ENTEROS Los números naturales surgen como respuesta a la necesidad de nuestros antepasados de contar los elementos de un conjunto (por ejemplo los animales de un rebaño) y de
NÚMEROS NATURALES Y NÚMEROS ENTEROS Los números naturales surgen como respuesta a la necesidad de nuestros antepasados de contar los elementos de un conjunto (por ejemplo los animales de un rebaño) y de
Tema 3: Aplicaciones de la diagonalización
 TEORÍA DE ÁLGEBRA II: Tema 3. DIPLOMATURA DE ESTADÍSTICA 1 Tema 3: Aplicaciones de la diagonalización 1 Ecuaciones en diferencias Estudiando la cría de conejos, Fibonacci llegó a las siguientes conclusiones:
TEORÍA DE ÁLGEBRA II: Tema 3. DIPLOMATURA DE ESTADÍSTICA 1 Tema 3: Aplicaciones de la diagonalización 1 Ecuaciones en diferencias Estudiando la cría de conejos, Fibonacci llegó a las siguientes conclusiones:
SISTEMAS DE ECUACIONES LINEALES
 SISTEMAS DE ECUACIONES LINEALES INTRODUCCIÓN En el presente documento se explican detalladamente dos importantes temas: 1. Descomposición LU. 2. Método de Gauss-Seidel. Se trata de dos importantes herramientas
SISTEMAS DE ECUACIONES LINEALES INTRODUCCIÓN En el presente documento se explican detalladamente dos importantes temas: 1. Descomposición LU. 2. Método de Gauss-Seidel. Se trata de dos importantes herramientas
Tema 1: Fundamentos de lógica, teoría de conjuntos y estructuras algebraicas: Apéndice
 Tema 1: Fundamentos de lógica, teoría de conjuntos y estructuras algebraicas: Apéndice 1 Polinomios Dedicaremos este apartado al repaso de los polinomios. Se define R[x] ={a 0 + a 1 x + a 2 x 2 +... +
Tema 1: Fundamentos de lógica, teoría de conjuntos y estructuras algebraicas: Apéndice 1 Polinomios Dedicaremos este apartado al repaso de los polinomios. Se define R[x] ={a 0 + a 1 x + a 2 x 2 +... +
BASES Y DIMENSIÓN. Propiedades de las bases. Ejemplos de bases.
 BASES Y DIMENSIÓN Definición: Base. Se llama base de un espacio (o subespacio) vectorial a un sistema generador de dicho espacio o subespacio, que sea a la vez linealmente independiente. β Propiedades
BASES Y DIMENSIÓN Definición: Base. Se llama base de un espacio (o subespacio) vectorial a un sistema generador de dicho espacio o subespacio, que sea a la vez linealmente independiente. β Propiedades
_ Antología de Física I. Unidad II Vectores. Elaboró: Ing. Víctor H. Alcalá-Octaviano
 24 Unidad II Vectores 2.1 Magnitudes escalares y vectoriales Unidad II. VECTORES Para muchas magnitudes físicas basta con indicar su valor para que estén perfectamente definidas y estas son las denominadas
24 Unidad II Vectores 2.1 Magnitudes escalares y vectoriales Unidad II. VECTORES Para muchas magnitudes físicas basta con indicar su valor para que estén perfectamente definidas y estas son las denominadas
Ahora podemos comparar fácilmente las cantidades de cada tamaño que se vende. Estos valores de la matriz se denominan elementos.
 Materia: Matemática de 5to Tema: Definición y Operaciones con Matrices 1) Definición Marco Teórico Una matriz consta de datos que se organizan en filas y columnas para formar un rectángulo. Por ejemplo,
Materia: Matemática de 5to Tema: Definición y Operaciones con Matrices 1) Definición Marco Teórico Una matriz consta de datos que se organizan en filas y columnas para formar un rectángulo. Por ejemplo,
Lección 9: Polinomios
 LECCIÓN 9 c) (8 + ) j) [ 9.56 ( 9.56)] 8 q) (a x b) d) ( 5) 4 k) (6z) r) [k 0 (k 5 k )] e) (. 0.) l) (y z) s) (v u ) 4 f) ( 5) + ( 4) m) (c d) 7 t) (p + q) g) (0 x 0.) n) (g 7 g ) Lección 9: Polinomios
LECCIÓN 9 c) (8 + ) j) [ 9.56 ( 9.56)] 8 q) (a x b) d) ( 5) 4 k) (6z) r) [k 0 (k 5 k )] e) (. 0.) l) (y z) s) (v u ) 4 f) ( 5) + ( 4) m) (c d) 7 t) (p + q) g) (0 x 0.) n) (g 7 g ) Lección 9: Polinomios
Vectores: Producto escalar y vectorial
 Nivelación de Matemática MTHA UNLP 1 Vectores: Producto escalar y vectorial Versores fundamentales Dado un sistema de coordenadas ortogonales, se considera sobre cada uno de los ejes y coincidiendo con
Nivelación de Matemática MTHA UNLP 1 Vectores: Producto escalar y vectorial Versores fundamentales Dado un sistema de coordenadas ortogonales, se considera sobre cada uno de los ejes y coincidiendo con
Tema 2. Espacios Vectoriales. 2.1. Introducción
 Tema 2 Espacios Vectoriales 2.1. Introducción Estamos habituados en diferentes cursos a trabajar con el concepto de vector. Concretamente sabemos que un vector es un segmento orientado caracterizado por
Tema 2 Espacios Vectoriales 2.1. Introducción Estamos habituados en diferentes cursos a trabajar con el concepto de vector. Concretamente sabemos que un vector es un segmento orientado caracterizado por
MÉTODOS DE ELIMINACIÓN Son tres los métodos de eliminación más utilizados: Método de igualación, de sustitución y de suma o resta.
 ECUACIONES SIMULTÁNEAS DE PRIMER GRADO CON DOS INCÓGNITAS. Dos o más ecuaciones con dos incógnitas son simultáneas cuando satisfacen iguales valores de las incógnitas. Para resolver ecuaciones de esta
ECUACIONES SIMULTÁNEAS DE PRIMER GRADO CON DOS INCÓGNITAS. Dos o más ecuaciones con dos incógnitas son simultáneas cuando satisfacen iguales valores de las incógnitas. Para resolver ecuaciones de esta
Sistemas de ecuaciones lineales
 Sistemas de ecuaciones lineales Problemas teóricos Sistemas de ecuaciones lineales con parámetros En los siguientes problemas hay que resolver el sistema de ecuaciones lineales para todo valor del parámetro
Sistemas de ecuaciones lineales Problemas teóricos Sistemas de ecuaciones lineales con parámetros En los siguientes problemas hay que resolver el sistema de ecuaciones lineales para todo valor del parámetro
Al consejero A no le gusta ninguno de sus colegas como presidente. Dos consejeros (C y E) están de acuerdo en los mismos candidatos (B, C y D).
 están de acuerdo en los mismos candidatos (B, C y D).") ÁLGEBRA DE MATRICE Página 48 Ayudándote de la tabla... De la tabla podemos deducir muchas cosas: Al consejero A no le gusta ninguno de sus colegas como presidente. B solo tiene un candidato el C. Dos consejeros
ÁLGEBRA DE MATRICE Página 48 Ayudándote de la tabla... De la tabla podemos deducir muchas cosas: Al consejero A no le gusta ninguno de sus colegas como presidente. B solo tiene un candidato el C. Dos consejeros
Ecuaciones de primer grado con dos incógnitas
 Ecuaciones de primer grado con dos incógnitas Si decimos: "las edades de mis padres suman 120 años", podemos expresar esta frase algebraicamente de la siguiente forma: Entonces, Denominamos x a la edad
Ecuaciones de primer grado con dos incógnitas Si decimos: "las edades de mis padres suman 120 años", podemos expresar esta frase algebraicamente de la siguiente forma: Entonces, Denominamos x a la edad
Apéndice A. Repaso de Matrices
 Apéndice A. Repaso de Matrices.-Definición: Una matriz es una arreglo rectangular de números reales dispuestos en filas y columnas. Una matriz com m filas y n columnas se dice que es de orden m x n de
Apéndice A. Repaso de Matrices.-Definición: Una matriz es una arreglo rectangular de números reales dispuestos en filas y columnas. Una matriz com m filas y n columnas se dice que es de orden m x n de
Curso de Procesamiento Digital de Imágenes
 Curso de Procesamiento Digital de Imágenes Impartido por: Elena Martínez Departamento de Ciencias de la Computación IIMAS, UNAM, cubículo 408 http://turing.iimas.unam.mx/~elena/teaching/pdi-lic.html elena.martinez@iimas.unam.mx
Curso de Procesamiento Digital de Imágenes Impartido por: Elena Martínez Departamento de Ciencias de la Computación IIMAS, UNAM, cubículo 408 http://turing.iimas.unam.mx/~elena/teaching/pdi-lic.html elena.martinez@iimas.unam.mx
UNIDAD DE APRENDIZAJE IV
 UNIDAD DE APRENDIZAJE IV Saberes procedimentales 1. Interpreta y utiliza correctamente el lenguaje simbólico ara el manejo de expresiones algebraicas. 2. Identifica operaciones básicas con expresiones
UNIDAD DE APRENDIZAJE IV Saberes procedimentales 1. Interpreta y utiliza correctamente el lenguaje simbólico ara el manejo de expresiones algebraicas. 2. Identifica operaciones básicas con expresiones
SUMA Y RESTA DE FRACCIONES
 SUMA Y RESTA DE FRACCIONES CONCEPTOS IMPORTANTES FRACCIÓN: Es la simbología que se utiliza para indicar que un todo será dividido en varias partes (se fraccionará). Toda fracción tiene dos partes básicas:
SUMA Y RESTA DE FRACCIONES CONCEPTOS IMPORTANTES FRACCIÓN: Es la simbología que se utiliza para indicar que un todo será dividido en varias partes (se fraccionará). Toda fracción tiene dos partes básicas:
Tema 3. Espacios vectoriales
 Tema 3. Espacios vectoriales Estructura del tema. Definición y propiedades. Ejemplos. Dependencia e independencia lineal. Conceptos de base y dimensión. Coordenadas Subespacios vectoriales. 0.1. Definición
Tema 3. Espacios vectoriales Estructura del tema. Definición y propiedades. Ejemplos. Dependencia e independencia lineal. Conceptos de base y dimensión. Coordenadas Subespacios vectoriales. 0.1. Definición
martilloatomico@gmail.com
 Titulo: OPERACIONES CON POLINOMIOS (Reducción de términos semejantes, suma y resta de polinomios, signos de agrupación, multiplicación y división de polinomios) Año escolar: 2do: año de bachillerato Autor:
Titulo: OPERACIONES CON POLINOMIOS (Reducción de términos semejantes, suma y resta de polinomios, signos de agrupación, multiplicación y división de polinomios) Año escolar: 2do: año de bachillerato Autor:
Cálculo científico y técnico con HP49g/49g+/48gII/50g Módulo 3: Aplicaciones Tema 3.7 Polinomio interpolador
 Cálculo científico y técnico con HP49g/49g+/48gII/50g Módulo 3: Aplicaciones Tema 3.7 Polinomio interpolador Francisco Palacios Escuela Politécnica Superior de Ingeniería Manresa Universidad Politécnica
Cálculo científico y técnico con HP49g/49g+/48gII/50g Módulo 3: Aplicaciones Tema 3.7 Polinomio interpolador Francisco Palacios Escuela Politécnica Superior de Ingeniería Manresa Universidad Politécnica
MATEMÁTICAS CON LA HOJA DE CÁLCULO
 MATEMÁTICAS CON LA HOJA DE CÁLCULO Podemos dar a esta aplicación un uso práctico en el aula de Matemáticas en varios sentidos: Como potente calculadora: sucesiones, límites, tablas estadísticas, parámetros
MATEMÁTICAS CON LA HOJA DE CÁLCULO Podemos dar a esta aplicación un uso práctico en el aula de Matemáticas en varios sentidos: Como potente calculadora: sucesiones, límites, tablas estadísticas, parámetros
Llamamos potencia a todo producto de factores iguales. Por ejemplo: 3 4 = 3 3 3 3
 1. NÚMEROS NATURALES POTENCIAS DE UN NÚMERO NATURAL Llamamos potencia a todo producto de factores iguales. Por ejemplo: 3 4 = 3 3 3 3 El factor que se repite es la base, y el número de veces que se repite
1. NÚMEROS NATURALES POTENCIAS DE UN NÚMERO NATURAL Llamamos potencia a todo producto de factores iguales. Por ejemplo: 3 4 = 3 3 3 3 El factor que se repite es la base, y el número de veces que se repite
OPERACIONES ELEMENTALES CON VECTORES
 VECTORES EN 3D (O EN R 3) Presentación: este apunte te servirá para repasar y asimilar que son los vectores en un espacio tridimensional, sólo hablamos de los vectores como se utilizan en Álgebra, para
VECTORES EN 3D (O EN R 3) Presentación: este apunte te servirá para repasar y asimilar que son los vectores en un espacio tridimensional, sólo hablamos de los vectores como se utilizan en Álgebra, para
CURSO CERO. Departamento de Matemáticas. Profesor: Raúl Martín Martín Sesiones 18 y 19 de Septiembre
 CURSO CERO Departamento de Matemáticas Profesor: Raúl Martín Martín Sesiones 18 y 19 de Septiembre Capítulo 1 La demostración matemática Demostración por inducción El razonamiento por inducción es una
CURSO CERO Departamento de Matemáticas Profesor: Raúl Martín Martín Sesiones 18 y 19 de Septiembre Capítulo 1 La demostración matemática Demostración por inducción El razonamiento por inducción es una
UNIDAD 4 PROCESOS DE MARKOV
 UNIDAD 4 PROCESOS DE MARKOV Anteriormente se han cubierto modelos estáticos, esto es, modelos cuyos parámetros permanecen sin cambio a través del tiempo. Con excepción de programación dinámica donde se
UNIDAD 4 PROCESOS DE MARKOV Anteriormente se han cubierto modelos estáticos, esto es, modelos cuyos parámetros permanecen sin cambio a través del tiempo. Con excepción de programación dinámica donde se
1 Espacios y subespacios vectoriales.
 UNIVERSIDAD POLITÉCNICA DE CARTAGENA Departamento de Matemática Aplicada y Estadística Espacios vectoriales y sistemas de ecuaciones 1 Espacios y subespacios vectoriales Definición 1 Sea V un conjunto
UNIVERSIDAD POLITÉCNICA DE CARTAGENA Departamento de Matemática Aplicada y Estadística Espacios vectoriales y sistemas de ecuaciones 1 Espacios y subespacios vectoriales Definición 1 Sea V un conjunto
VECTORES. Módulo, dirección y sentido de un vector fijo En un vector fijo se llama módulo del mismo a la longitud del segmento que lo define.
 VECTORES El estudio de los vectores es uno de tantos conocimientos de las matemáticas que provienen de la física. En esta ciencia se distingue entre magnitudes escalares y magnitudes vectoriales. Se llaman
VECTORES El estudio de los vectores es uno de tantos conocimientos de las matemáticas que provienen de la física. En esta ciencia se distingue entre magnitudes escalares y magnitudes vectoriales. Se llaman
Apéndice Álgebra lineal con wxmaxima
 Apéndice Álgebra lineal con wxmaxima Objetivos 1. Definir matrices con wxmaxima. 2. Aplicar con wxmaxima operaciones con matrices. 3. Aplicar transformaciones elementales de matrices. 4. Calcular el determinante
Apéndice Álgebra lineal con wxmaxima Objetivos 1. Definir matrices con wxmaxima. 2. Aplicar con wxmaxima operaciones con matrices. 3. Aplicar transformaciones elementales de matrices. 4. Calcular el determinante
Matrices invertibles. La inversa de una matriz
 Matrices invertibles. La inversa de una matriz Objetivos. Estudiar la definición y las propiedades básicas de la matriz inversa. Más adelante en este curso vamos a estudiar criterios de invertibilidad
Matrices invertibles. La inversa de una matriz Objetivos. Estudiar la definición y las propiedades básicas de la matriz inversa. Más adelante en este curso vamos a estudiar criterios de invertibilidad
TEMA 2 POLINOMIOS Y FRACCIONES ALGEBRAICAS
 Matemáticas B 4º E.S.O. Tema : Polinomios y fracciones algebraicas. 1 TEMA POLINOMIOS Y FRACCIONES ALGEBRAICAS.1 COCIENTE DE POLINOMIOS 4º.1.1 COCIENTE DE MONOMIOS 4º El cociente de un monomio entre otro
Matemáticas B 4º E.S.O. Tema : Polinomios y fracciones algebraicas. 1 TEMA POLINOMIOS Y FRACCIONES ALGEBRAICAS.1 COCIENTE DE POLINOMIOS 4º.1.1 COCIENTE DE MONOMIOS 4º El cociente de un monomio entre otro
MATRICES PRODUCTO DE MATRICES POTENCIAS NATURALES DE MATRICES CUADRADAS
 Tema 1.- MATRICES MATRICES PRODUCTO DE MATRICES POTENCIAS NATURALES DE MATRICES CUADRADAS Fundamentos Matemáticos de la Ingeniería 1 Un poco de historia Lord Cayley es uno de los fundadores de la teoría
Tema 1.- MATRICES MATRICES PRODUCTO DE MATRICES POTENCIAS NATURALES DE MATRICES CUADRADAS Fundamentos Matemáticos de la Ingeniería 1 Un poco de historia Lord Cayley es uno de los fundadores de la teoría
FORMA CANONICA DE JORDAN Y ECUACIONES DIFERENCIALES LINEALES A COEFICIENTES CONSTANTES
 FORMA CANONICA DE JORDAN Y ECUACIONES DIFERENCIALES LINEALES A COEFICIENTES CONSTANTES Eleonora Catsigeras 6 de mayo de 997 Notas para el curso de Análisis Matemático II Resumen Se enuncia sin demostración
FORMA CANONICA DE JORDAN Y ECUACIONES DIFERENCIALES LINEALES A COEFICIENTES CONSTANTES Eleonora Catsigeras 6 de mayo de 997 Notas para el curso de Análisis Matemático II Resumen Se enuncia sin demostración
Tarea 7 Soluciones. Sol. Sea x el porcentaje que no conocemos, entonces tenemos la siguiente. (3500)x = 420. x = 420 3500 = 3 25
x = 420. x = 420 3500 = 3 25") Tarea 7 Soluciones. Una inversión de $3500 produce un rendimiento de $420 en un año, qué rendimiento producirá una inversión de $4500 a la misma tasa de interés durante el mismo tiempo? Sol. Sea x el porcentaje
Tarea 7 Soluciones. Una inversión de $3500 produce un rendimiento de $420 en un año, qué rendimiento producirá una inversión de $4500 a la misma tasa de interés durante el mismo tiempo? Sol. Sea x el porcentaje
Valores y vectores propios de una matriz. Juan-Miguel Gracia
 Juan-Miguel Gracia Índice 1 Valores propios 2 Polinomio característico 3 Independencia lineal 4 Valores propios simples 5 Diagonalización de matrices 2 / 28 B. Valores y vectores propios Definiciones.-
Juan-Miguel Gracia Índice 1 Valores propios 2 Polinomio característico 3 Independencia lineal 4 Valores propios simples 5 Diagonalización de matrices 2 / 28 B. Valores y vectores propios Definiciones.-
Polinomios y fracciones algebraicas
 UNIDAD Polinomios y fracciones algebraicas U n polinomio es una expresión algebraica en la que las letras y los números están sometidos a las operaciones de sumar, restar y multiplicar. Los polinomios,
UNIDAD Polinomios y fracciones algebraicas U n polinomio es una expresión algebraica en la que las letras y los números están sometidos a las operaciones de sumar, restar y multiplicar. Los polinomios,
Lección 4: Suma y resta de números racionales
 GUÍA DE MATEMÁTICAS II Lección : Suma y resta de números racionales En esta lección recordaremos cómo sumar y restar números racionales. Como los racionales pueden estar representados como fracción o decimal,
GUÍA DE MATEMÁTICAS II Lección : Suma y resta de números racionales En esta lección recordaremos cómo sumar y restar números racionales. Como los racionales pueden estar representados como fracción o decimal,
Prácticas de Algebra con Mathematica II (Ingeniería Industrial). Jose Salvador Cánovas Peña. Departamento de Matemática Aplicada y Estadística.
. Jose Salvador Cánovas Peña. Departamento de Matemática Aplicada y Estadística.") Prácticas de Algebra con Mathematica II (Ingeniería Industrial). Jose Salvador Cánovas Peña. Departamento de Matemática Aplicada y Estadística. Índice General 1 PRACTICAS CON MATHEMATICA 2 1.1 Introducción...
Prácticas de Algebra con Mathematica II (Ingeniería Industrial). Jose Salvador Cánovas Peña. Departamento de Matemática Aplicada y Estadística. Índice General 1 PRACTICAS CON MATHEMATICA 2 1.1 Introducción...
Tema : ELECTRÓNICA DIGITAL
 (La Herradura Granada) Departamento de TECNOLOGÍA Tema : ELECTRÓNICA DIGITAL.- Introducción. 2.- Representación de operadores lógicos. 3.- Álgebra de Boole. 3..- Operadores básicos. 3.2.- Función lógica
(La Herradura Granada) Departamento de TECNOLOGÍA Tema : ELECTRÓNICA DIGITAL.- Introducción. 2.- Representación de operadores lógicos. 3.- Álgebra de Boole. 3..- Operadores básicos. 3.2.- Función lógica
Comenzaremos recordando algunas definiciones y propiedades estudiadas en el capítulo anterior.
 Capítulo 2 Matrices En el capítulo anterior hemos utilizado matrices para la resolución de sistemas de ecuaciones lineales y hemos visto que, para n, m N, el conjunto de las matrices de n filas y m columnas
Capítulo 2 Matrices En el capítulo anterior hemos utilizado matrices para la resolución de sistemas de ecuaciones lineales y hemos visto que, para n, m N, el conjunto de las matrices de n filas y m columnas
Cálculo Simbólico también es posible con GeoGebra
 www.fisem.org/web/union ISSN: 1815-0640 Número 34. Junio de 2013 páginas 151-167 Coordinado por Agustín Carrillo de Albornoz Cálculo Simbólico también es posible con GeoGebra Antes de exponer las posibilidades
www.fisem.org/web/union ISSN: 1815-0640 Número 34. Junio de 2013 páginas 151-167 Coordinado por Agustín Carrillo de Albornoz Cálculo Simbólico también es posible con GeoGebra Antes de exponer las posibilidades
Cómo?: Resolviendo el sistema lineal homógeneo que satisfacen las componentes de cualquier vector de S. x4 = x 1 x 3 = x 2 x 1
 . ESPACIOS VECTORIALES Consideremos el siguiente subconjunto de R 4 : S = {(x, x 2, x 3, x 4 )/x x 4 = 0 x 2 x 4 = x 3 a. Comprobar que S es subespacio vectorial de R 4. Para demostrar que S es un subespacio
. ESPACIOS VECTORIALES Consideremos el siguiente subconjunto de R 4 : S = {(x, x 2, x 3, x 4 )/x x 4 = 0 x 2 x 4 = x 3 a. Comprobar que S es subespacio vectorial de R 4. Para demostrar que S es un subespacio
Este documento ha sido generado para facilitar la impresión de los contenidos. Los enlaces a otras páginas no serán funcionales.
 Este documento ha sido generado para facilitar la impresión de los contenidos. Los enlaces a otras páginas no serán funcionales. Introducción Por qué La Geometría? La Geometría tiene como objetivo fundamental
Este documento ha sido generado para facilitar la impresión de los contenidos. Los enlaces a otras páginas no serán funcionales. Introducción Por qué La Geometría? La Geometría tiene como objetivo fundamental
Selectividad Septiembre 2013 OPCIÓN B
 Pruebas de Acceso a las Universidades de Castilla y León ATEÁTICAS APLICADAS A LAS CIENCIAS SOCIALES EJERCICIO Nº páginas Tablas OPTATIVIDAD: EL ALUNO DEBERÁ ESCOGER UNA DE LAS DOS OPCIONES Y DESARROLLAR
Pruebas de Acceso a las Universidades de Castilla y León ATEÁTICAS APLICADAS A LAS CIENCIAS SOCIALES EJERCICIO Nº páginas Tablas OPTATIVIDAD: EL ALUNO DEBERÁ ESCOGER UNA DE LAS DOS OPCIONES Y DESARROLLAR
4 APLICACIONES LINEALES. DIAGONALIZACIÓN
 4 APLICACIONES LINEALES DIAGONALIZACIÓN DE MATRICES En ocasiones, y con objeto de simplificar ciertos cálculos, es conveniente poder transformar una matriz en otra matriz lo más sencilla posible Esto nos
4 APLICACIONES LINEALES DIAGONALIZACIÓN DE MATRICES En ocasiones, y con objeto de simplificar ciertos cálculos, es conveniente poder transformar una matriz en otra matriz lo más sencilla posible Esto nos
Módulo 9 Sistema matemático y operaciones binarias
 Módulo 9 Sistema matemático y operaciones binarias OBJETIVO: Identificar los conjuntos de números naturales, enteros, racionales e irracionales; resolver una operación binaria, representar un número racional
Módulo 9 Sistema matemático y operaciones binarias OBJETIVO: Identificar los conjuntos de números naturales, enteros, racionales e irracionales; resolver una operación binaria, representar un número racional
Los números racionales
 Los números racionales Los números racionales Los números fraccionarios o fracciones permiten representar aquellas situaciones en las que se obtiene o se debe una parte de un objeto. Todas las fracciones
Los números racionales Los números racionales Los números fraccionarios o fracciones permiten representar aquellas situaciones en las que se obtiene o se debe una parte de un objeto. Todas las fracciones
Operaciones con polinomios
 Operaciones con polinomios Los polinomios son una generalización de nuestro sistema de numeración. Cuando escribimos un número, por ejemplo, 2 354, queremos decir: 2 354 = 2 000 + 300 + 50 + 4 = 2)1 000)
Operaciones con polinomios Los polinomios son una generalización de nuestro sistema de numeración. Cuando escribimos un número, por ejemplo, 2 354, queremos decir: 2 354 = 2 000 + 300 + 50 + 4 = 2)1 000)
Repaso de matrices, determinantes y sistemas de ecuaciones lineales
 Tema 1 Repaso de matrices, determinantes y sistemas de ecuaciones lineales Comenzamos este primer tema con un problema de motivación. Problema: El aire puro está compuesto esencialmente por un 78 por ciento
Tema 1 Repaso de matrices, determinantes y sistemas de ecuaciones lineales Comenzamos este primer tema con un problema de motivación. Problema: El aire puro está compuesto esencialmente por un 78 por ciento
5.1Definición transformación lineal de núcleo ó kernel, e imagen de una transformación lineal y sus propiedades
 5- ransformaciones Lineales 5Definición transformación lineal de núcleo ó kernel, e imagen de una transformación lineal sus propiedades Se denomina transformación lineal a toda función,, cuo dominio codominio
5- ransformaciones Lineales 5Definición transformación lineal de núcleo ó kernel, e imagen de una transformación lineal sus propiedades Se denomina transformación lineal a toda función,, cuo dominio codominio
Las matrices Parte 1-2 o bachillerato
 Parte 1-2 o bachillerato wwwmathandmatesurlph 2014 1 Introducción Generalidades 2 Definición Ejercicio 1 : Suma de dos matrices cuadradas 2x2 Ejercicio 2 : Suma de dos matrices cuadradas 3x3 Propiedades
Parte 1-2 o bachillerato wwwmathandmatesurlph 2014 1 Introducción Generalidades 2 Definición Ejercicio 1 : Suma de dos matrices cuadradas 2x2 Ejercicio 2 : Suma de dos matrices cuadradas 3x3 Propiedades
ALGEBRA LINEAL. Héctor Jairo Martínez R. Ana María Sanabria R.
 ALGEBRA LINEAL Héctor Jairo Martínez R. Ana María Sanabria R. SEGUNDO SEMESTRE 8 Índice general. SISTEMAS DE ECUACIONES LINEALES.. Introducción................................................ Conceptos
ALGEBRA LINEAL Héctor Jairo Martínez R. Ana María Sanabria R. SEGUNDO SEMESTRE 8 Índice general. SISTEMAS DE ECUACIONES LINEALES.. Introducción................................................ Conceptos
Cambio de representaciones para variedades lineales.
 Cambio de representaciones para variedades lineales 18 de marzo de 2015 ALN IS 5 Una variedad lineal en R n admite dos tipos de representaciones: por un sistema de ecuaciones implícitas por una familia
Cambio de representaciones para variedades lineales 18 de marzo de 2015 ALN IS 5 Una variedad lineal en R n admite dos tipos de representaciones: por un sistema de ecuaciones implícitas por una familia
Capítulo 6. Introducción a la POO
 Capítulo 6. Introducción a la POO 6. 1. Clases, Objetos y Métodos Definición La Programación Orientada a Objetos (POO) es una forma especial de programar, más cercana a cómo expresaríamos las cosas en
Capítulo 6. Introducción a la POO 6. 1. Clases, Objetos y Métodos Definición La Programación Orientada a Objetos (POO) es una forma especial de programar, más cercana a cómo expresaríamos las cosas en
Las matrices tienen un número cada vez mas creciente de aplicaciones en la solución de problemas en Ciencia y Tecnología.
 Aplicaciones de las Matrices a la Solución de Problemas de Redes Eléctricas Resumen Se muestra como obtener, sistemas de ecuaciones lineales que permitan calcular intensidades de corrientes en los ramales
Aplicaciones de las Matrices a la Solución de Problemas de Redes Eléctricas Resumen Se muestra como obtener, sistemas de ecuaciones lineales que permitan calcular intensidades de corrientes en los ramales
Si los términos no son semejantes no se pueden reducir a un total. Cuando los elementos son de la misma especie se dice que son semejantes.
 Operaciones básicas con Expresiones Algebraicas (adición, sustracción, multiplicación y división) y redacta un informe Teórico práctico donde describas el procedimiento para realizar cada operación y al
Operaciones básicas con Expresiones Algebraicas (adición, sustracción, multiplicación y división) y redacta un informe Teórico práctico donde describas el procedimiento para realizar cada operación y al
ÁLGEBRA LINEAL. Apuntes elaborados por. Juan González-Meneses López. Curso 2008/2009. Departamento de Álgebra. Universidad de Sevilla.
 ÁLGEBRA LINEAL Apuntes elaborados por Juan González-Meneses López. Curso 2008/2009 Departamento de Álgebra. Universidad de Sevilla. Índice general Tema 1. Matrices. Determinantes. Sistemas de ecuaciones
ÁLGEBRA LINEAL Apuntes elaborados por Juan González-Meneses López. Curso 2008/2009 Departamento de Álgebra. Universidad de Sevilla. Índice general Tema 1. Matrices. Determinantes. Sistemas de ecuaciones
PROGRAMACIÓN ORIENTADA A OBJETOS
 PROGRAMACIÓN ORIENTADA A OBJETOS Clase 1. Introducción Profesor: Diego Sánchez Gómez Introducción a la programación orientada a objetos 1. Introducción a la programación orientada a objetos 2. Las clases
PROGRAMACIÓN ORIENTADA A OBJETOS Clase 1. Introducción Profesor: Diego Sánchez Gómez Introducción a la programación orientada a objetos 1. Introducción a la programación orientada a objetos 2. Las clases
ARREGLOS DEFINICION GENERAL DE ARREGLO
 ARREGLOS DEFINICION GENERAL DE ARREGLO Conjunto de cantidades o valores homogéneos, que por su naturaleza se comportan de idéntica forma y deben de ser tratados en forma similar. Se les debe de dar un
ARREGLOS DEFINICION GENERAL DE ARREGLO Conjunto de cantidades o valores homogéneos, que por su naturaleza se comportan de idéntica forma y deben de ser tratados en forma similar. Se les debe de dar un
Álgebra Lineal Ma1010
 Álgebra Lineal Ma1010 Mínimos Cuadrados Departamento de Matemáticas ITESM Mínimos Cuadrados Álgebra Lineal - p. 1/34 En esta sección veremos cómo se trabaja un sistema inconsistente. Esta situación es
Álgebra Lineal Ma1010 Mínimos Cuadrados Departamento de Matemáticas ITESM Mínimos Cuadrados Álgebra Lineal - p. 1/34 En esta sección veremos cómo se trabaja un sistema inconsistente. Esta situación es
Universidad de Costa Rica Escuela de Matemática ALGEBRA LINEAL. x x1 n. θ y. 1 n x1 n ȳ1 n. Carlos Arce S. William Castillo E. Jorge González V.
 Universidad de Costa Rica Escuela de Matemática ALGEBRA LINEAL x x x1 n θ y y ȳ1 n 1 n x1 n ȳ1 n Carlos Arce S. William Castillo E. Jorge González V. 2003 Algebra Lineal Carlos Arce S., William Castillo
Universidad de Costa Rica Escuela de Matemática ALGEBRA LINEAL x x x1 n θ y y ȳ1 n 1 n x1 n ȳ1 n Carlos Arce S. William Castillo E. Jorge González V. 2003 Algebra Lineal Carlos Arce S., William Castillo
Opción A Ejercicio 1 opción A, modelo 4 Septiembre 2014
 IES Fco Ayala de Granada Septiembre de 014 (Modelo 4) Soluciones Germán-Jesús Rubio Luna [ 5 puntos] Sabiendo que Sabiendo que 0 0 cos(3) - e + a sen() Opción A Ejercicio 1 opción A, modelo 4 Septiembre
IES Fco Ayala de Granada Septiembre de 014 (Modelo 4) Soluciones Germán-Jesús Rubio Luna [ 5 puntos] Sabiendo que Sabiendo que 0 0 cos(3) - e + a sen() Opción A Ejercicio 1 opción A, modelo 4 Septiembre
Operaciones con vectores y matrices ECONOMETRÍA I OPERACIONES CON VECTORES Y MATRICES. Ana Morata Gasca
 ECONOMETRÍA I OPERACIONES CON VECTORES Y MATRICES Ana Morata Gasca 1 DEFINICIÓN DE VECTOR Un vector es todo segmento de recta dirigido en el espacio. CARACTERÍSTICAS DE UN VECTOR Origen o Punto de aplicación:
ECONOMETRÍA I OPERACIONES CON VECTORES Y MATRICES Ana Morata Gasca 1 DEFINICIÓN DE VECTOR Un vector es todo segmento de recta dirigido en el espacio. CARACTERÍSTICAS DE UN VECTOR Origen o Punto de aplicación:
3. Equivalencia y congruencia de matrices.
 3. Equivalencia y congruencia de matrices. 1 Transformaciones elementales. 1.1 Operaciones elementales de fila. Las operaciones elementales de fila son: 1. H ij : Permuta la fila i con la fila j. 2. H
3. Equivalencia y congruencia de matrices. 1 Transformaciones elementales. 1.1 Operaciones elementales de fila. Las operaciones elementales de fila son: 1. H ij : Permuta la fila i con la fila j. 2. H
SEMINARIO VIRTUAL : TECNICAS DE CREDITOS Y COBRANZAS
 SESION 3 COSTOS DE LAS COBRANZAS. Una de las variables principales de la política de cobranza es el costo de los procedimientos de cobranza, situado dentro de ciertos límites, mientras mayores sean los
SESION 3 COSTOS DE LAS COBRANZAS. Una de las variables principales de la política de cobranza es el costo de los procedimientos de cobranza, situado dentro de ciertos límites, mientras mayores sean los
Tema 2 Límites de Funciones
 Tema 2 Límites de Funciones 2.1.- Definición de Límite Idea de límite de una función en un punto: Sea la función. Si x tiende a 2, a qué valor se aproxima? Construyendo - + una tabla de valores próximos
Tema 2 Límites de Funciones 2.1.- Definición de Límite Idea de límite de una función en un punto: Sea la función. Si x tiende a 2, a qué valor se aproxima? Construyendo - + una tabla de valores próximos
SUCESIONES INFINITAS
 SUCESIONES INFINITAS 1 2 Ejercicio: Cálculo del término general de una sucesión: Encontrar el quincuagésimo término de la sucesión 1, 3, 5, 7,... Es una progresión aritmética de diferencia 2. Su término
SUCESIONES INFINITAS 1 2 Ejercicio: Cálculo del término general de una sucesión: Encontrar el quincuagésimo término de la sucesión 1, 3, 5, 7,... Es una progresión aritmética de diferencia 2. Su término
5 Ecuaciones lineales y conceptos elementales de funciones
 Programa Inmersión, Verano 206 Notas escritas por Dr. M Notas del cursos. Basadas en los prontuarios de MATE 300 y MATE 3023 Clase #6: martes, 7 de junio de 206. 5 Ecuaciones lineales y conceptos elementales
Programa Inmersión, Verano 206 Notas escritas por Dr. M Notas del cursos. Basadas en los prontuarios de MATE 300 y MATE 3023 Clase #6: martes, 7 de junio de 206. 5 Ecuaciones lineales y conceptos elementales
Espacios vectoriales y aplicaciones lineales.
 Práctica 2 Espacios vectoriales y aplicaciones lineales. Contenido: Localizar bases de espacios vectoriales. Suma directa. Bases y dimensiones. Cambio de base. Aplicaciones lineales. Matriz asociada en
Práctica 2 Espacios vectoriales y aplicaciones lineales. Contenido: Localizar bases de espacios vectoriales. Suma directa. Bases y dimensiones. Cambio de base. Aplicaciones lineales. Matriz asociada en
Tema 6: Ecuaciones e inecuaciones.
 Tema 6: Ecuaciones e inecuaciones. Ejercicio 1. Encontrar, tanteando, alguna solución de cada una de las siguientes ecuaciones: 3 a) + 5 = 69 Probamos para =,3,4,... = = 3 3 = 4 4 3 3 3 + 5 = 13. + 5 =
Tema 6: Ecuaciones e inecuaciones. Ejercicio 1. Encontrar, tanteando, alguna solución de cada una de las siguientes ecuaciones: 3 a) + 5 = 69 Probamos para =,3,4,... = = 3 3 = 4 4 3 3 3 + 5 = 13. + 5 =
PRÁCTICA DE LABORATORIO 3 Tipo Abstrato de Dato
 ESCUELA DE INGENIERÍA DE SISTEMAS DEPARTAMENTO DE COMPUTACIÓN PROGRAMACIÓN 2 PRÁCTICA DE LABORATORIO 3 Tipo Abstrato de Dato Contenido Introducción...1 Dato...1 Valor...1 Tipo de Dato...2 Tipo Abstracto
ESCUELA DE INGENIERÍA DE SISTEMAS DEPARTAMENTO DE COMPUTACIÓN PROGRAMACIÓN 2 PRÁCTICA DE LABORATORIO 3 Tipo Abstrato de Dato Contenido Introducción...1 Dato...1 Valor...1 Tipo de Dato...2 Tipo Abstracto
Unidad 5 Utilización de Excel para la solución de problemas de programación lineal
 Unidad 5 Utilización de Excel para la solución de problemas de programación lineal La solución del modelo de programación lineal (pl) es una adaptación de los métodos matriciales ya que el modelo tiene
Unidad 5 Utilización de Excel para la solución de problemas de programación lineal La solución del modelo de programación lineal (pl) es una adaptación de los métodos matriciales ya que el modelo tiene