Puntos y Vectores. 16 de Marzo de 2012
|
|
|
- Francisco José Mariano Pereyra Ortíz
- hace 7 años
- Vistas:
Transcripción
1 Geometría en Puntos y Vectores Universidad Autónoma Metropolitana Unidad Iztapalapa 16 de Marzo de 2012
2 Introducción En Geometría analítica plana las relaciones y las propiedades geométricas se expresan por medio de ecuaciones que contienen, en general, dos variables. En Geometría analítica d, en cambio, tales ecuaciones contienen, en general, tres variables, y, es evidente, que la presencia de esta variable adicional traerá una mayor complicación analítica que las relaciones con el plano. Además, la tercera dimensión de la Geometría analítica d exigirá más trabajo para poder de visualizar las figuras en que el que requiere para figuras en el plano.
3 Sea R 3 el conjunto de ternas ordenadas de números reales, esto es, R 3 = R R R = {(x, y, z); x R, y R, y z R}. Dadas dos ternas ordenadas (x, y, z), (x, y, z ) R 3 son iguales si, y sólo si x = x, y = y y z = z. Como veremos, cada terna ordenada (x, y, z) R 3 se puede asociar de manera única con un punto d, y cada punto d se puede asociar en forma única con una terna ordenada de números reales mediante un sistema de coordenadas cartesianas rectangular en tres dimensiones.

4 Consideremos tres planos mutuamente perpendiculares que se cortan en el punto común 0, tal como se indica en la siguiente figura:
5 Como el punto en va a localizarse con referencia a estos elementos, los planos se llaman planos coordenados, las rectas de intersección de estos planos se llaman ejes coordenados. El punto de intersección de los tres planos 0 = (0, 0, 0) es el origen del sistema de coordenadas rectangulares. Teniendo lo anterior estamos en libertad de designar los ejes coordenados como queramos. Un convenio es el indicado en la figura anterior; se dice entonces que el sistema de coordenadas es un sistema de mano derecha. Los ejes coordenados son: 1 El eje x es la recta determinada por 0 y x. 2 El eje y es la recta determinada por 0 y y. 3 El eje z es la recta determinada por 0 y z. Su dirección positiva está indicada en cada uno de los ejes por una flecha.
6 Cada plano coordenado se designa por los dos ejes coordenados que contiene. Así, el plano coordenado que contiene al eje x y al eje y se llama plano xy; análogamente, tenemos los planos xz y yz. Los tres planos coordenados dividen en ocho regiones llamadas octantes. El octante determinado por las partes positivas de los ejes coordenados se llama primer octante; no se acostumbra asignar ningún número a los siete octantes restantes, sin embargo se identifican mediante los signos de las componentes de ls ternas coordenadas a las que están asociados, como (+,, +). En la práctica, no es necesario representar el sistema de coordenadas trazando los planos coordenados como aparecen en la figura anterior; será suficiente trazar solamente los ejes coordenados, además marcamos una unidad, como se indica en la siguiente figura:
7

8 Sea P un punto cualquiera d. Su posición puede determinarse haciendo pasar por P planos paralelos a los tres planos coordenados y considerando los a, b y c en que cortan a los ejes x, y y z, respectivamente. Estos planos, juntos con los planos coordenados forman un paralelepipedo rectangular recto, como muestra la siguiente figura:
9 Evidentemente, la posición de P con relación al sistema de coordenadas está determinada por sus distancias a los planos coordenados. Estas distancias están dadas por las longitudes de los segmentos dirigidos 0a, 0b y 0c, llamados a, b y c respectivamente. Entonces los tres números reales a, b y c constituyen la coordenada x, la coordenada y y la coordenada z de P. Cada coordenada se mide, a partir del origen 0 sobre el eje coordenado correspondiente, y es positiva o negativa según sí su dirección es la misma o la opuesta a la de la dirección positiva del eje. En este caso decimos que P tiene coordenadas (a, b, c). Reciprocamente, si consideramos coordenadas (a, b, c) podemos asignar un punto P en construyendo un paralelepipedo usando los planos s y los planos paralelos a estos por los a, b y c marcados sobre los ejes x, y y z respectivamente.
10 Resumiendo, podemos decir: Observación: Un punto P en tiene una y solamente una terna de coordenadas (x, y, z) relativa a un sistema coordenado rectangular especificado. Reciprocamente, una terna de coordenadas (x, y, z) determina uno y solamente un punto P en con respecto a un sistema coordenado fijo. Por tanto, podemos decir que un sistema de coordenadas rectangulares en establece una correspondencia biunívoca entre cada punto d y una terna ordenada de números reales.
 está dada por d(s, T ) = (x 2 x 1 ) 2 + (y 2 y 1 ) 2 + (z 2 z 1")
11 La distancia que separa a dos en se obtiene aplicando el Teorema de Pitágoras dos veces, si S(x 1, y 1, z 1 ) y T (x 2, y 2, z 2 ) son dos en, entonces la distancia de S a T, que denotaremos d(s, T ) está dada por d(s, T ) = (x 2 x 1 ) 2 + (y 2 y 1 ) 2 + (z 2 z 1 ) 2.
12 Si S(x 1, y 1, z 1 ) T (x 2, y 2, z 2 ) y consideramos los auxiliares U(x 2, y 1, z 1 ) y V (x 2, y 2, z 1 ) al considerar el triángulo rectángulo SUV tenemos que d(s, V ) = d(s, U) 2 + d(u, V ) 2 por otra parte, si consideramos el triángulo rectángulo SVT, entonces d(s, T ) = d(s, V ) 2 + d(v, T ) 2 es decir d(s, T ) = = d(s, U) 2 + d(u, V ) 2 + d(v, T ) 2 (x 2 x 1 ) 2 + (y 2 y 1 ) 2 + (z 2 z 1 ) 2
13 Ejemplo Los S(3, 5, 2), T (2, 3, 1) y U(6, 1, 1) son los vértices de un triángulo rectángulo, ya que: d(s, T ) = = d(s, U) = = d(t, U) = entonces ya que = (3 2) 2 + (5 3) 2 + (2 ( 1)) = 14. (3 6) 2 + (5 1) 2 + (2 ( 1)) = 34. (2 6) 2 + (3 1) 2 + ( 1 ( 1)) = 20 d(s, U) 2 = d(s, T ) 2 + d(t, U) 2 34 =
14 División de un segmento en una razón dada De manera análoga a la realizada en R 2 tenemos: Propiedad 1 Si P l (x 1, y l, z 1 ) y P 1 (x 2, y 2, z 2 ) son los extremos de un segmento dirigido P 1 P 2, las coordenadas (x, y, z) de un punto P que divide a este segmento en la razón r = P 1 P : PP 2 son para r 1 x = x 1 + rx r, y = y 1 + ry 2, y + z = z 1 + rz r 1 + r La demostración se deja como ejercicio.
15 Como consecuencia de la propiedad anterior tenemos que las coordenadas del punto medio del segmento que une los P 1 (x 1, y 1, z 1 ) y P 2 (x 2, y 2, z 2 ) son ( x1 + x 2 2, y 1 + y 2, z 1 + z ). Por ejemplo, el punto medio de S(1, 3, 5) y T ( 5, 7, 1) está dado como ( 1 5 M = 2, 3 7 2, ) = ( 2, 2, 3). 2
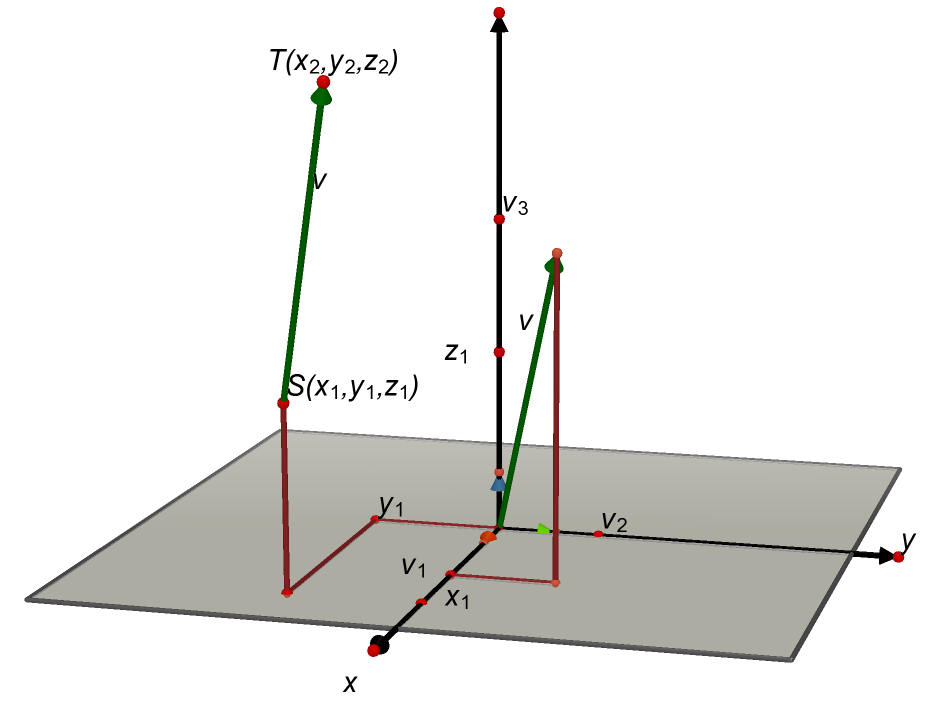
16 Cada terna ordenada de números reales (v 1, v 2, v 3 ) se puede asociar a una traslación en, tal como a cada par ordenado de números reales se le puede asociar una traslación en el plano. Si S(x 1, y 1, z 1 ) y T (x 2, y 2, z 2 ) son dos en R 3 el vector geométrico v = (x 2 x 1, y 2 y 1, z 2 z 1 ) representa a la traslación del punto S al punto T. Se dice que S es el punto inicial del vector geométrico v, y que T es el punto final del vector geométrico v. Si el punto inicial de un vector geométrico es el origen O(0, 0, 0), entonces se dice que el vector está en posición ordinaria, y que es la representación ordinaria del vector correspondiente.
17
18 Norma de un vector La norma v de un vector v = (v 1, v 2, v 3 ) en R 3 se define como v = v1 2 + v v 3 2. La norma de un vector en R 3 se puede interpretar como la longitud de cualquiera de sus representaciones geométricas, es decir, la distancia que hay entre el punto inicial y el punto final del vector.
19 Operaciones entre vectores Si v = (v 1, v 2, v 3 ) y u = (u 1, u 2, u 3 ) son dos vectores en R 3 y λ R entonces se definen: 1 La suma de vectores v + u := (v 1 + u 1, v 2 + u 2, v 3 + u 3 ), 2 El producto de un vector por un escalar: λ v := (λv 1, λv 2, λv 3 ). 3 El producto punto (o producto interior) de dos vectores v u := v 1 u 1 + v 2 u 2 + v 3 u 3.
20 Propiedades Si v = (v 1, v 2, v 3 ), u = (u 1, u 2, u 3 ), w = (w 1, w 2, w 3 ) R 3, λ, µ R entonces se satisfacen las siguientes propiedades: 1 u + v R 3. La suma es cerrada. 2 u + v = v + u. La suma es conmutativa. 3 u + ( v + w) = ( u + v) + w. La suma es asociativa. 4 0 tal que v 0 + v = v. Existe neutro aditivo. 5 v R 3 v R 3 tal que v + ( v) = 0. Existe inverso aditivo. 6 λ v R 3. El producto por escalares es cerrado. 7 λ( u + v) = λ u + λ v. El producto por escalares distribuye con respecto a la suma de vectores. 8 (λ + µ) v = λ v + µ v. El producto por escalares distribuye con respecto a la suma. 9 (λµ) u = λ(µ u). Asociatividad u = u. Idéntico multiplicativo.
21 Propiedades del producto punto Si v = (v 1, v 2, v 3 ), u = (u 1, u 2, u 3 ), w = (w 1, w 2, w 3 ) R 3, λ R entonces 1 v v = v 2. 2 u v = v u. 3 λ( u v) = (λ u) v. 4 λ v = λ v. 5 u ( v + w) = u v + u w. 6 u + v 2 = u 2 + v u v. 7 u v 2 = u 2 + v 2 2 u v. 8 u v u v. (Desigualdad de Schwartz). 9 u + v u + v. (Desigualdad del triángulo). 10 u v cos θ = u v, donde θ es el ángulo formado por los vectores u y v.
22 Cosenos directores Si v R 3 y λ R, entonces v y λ v tienen la misma dirección y el mismo sentido si λ 0 pero tienen sentidos opuestos si λ < 0. En ambos casos se dice que v y λ v son vectores paralelos. Se ha visto que la dirección de un vector en R 2 \ { 0} queda determinado por la medida del ángulo que forma la parte positiva del eje x con la representación geométrica ordinaria del vector. La dirección de un vector v R 3 \ { 0} queda determinada por tres ángulos de dirección, cada uno de los cuales separa a la representación geométrica ordinaria de una de las partes positivas de los ejes de coordenadas. Estos ángulos de dirección se denotan normalmente mediante las letras griegas de la siguiente manera: α es el ángulo de dirección con respecto a la parte positiva del eje x; β es el ángulo de dirección con respecto a la parte positiva del eje y; γ es el ángulo de dirección con respecto a la parte positiva del eje z.
23
24 En particular, si v 0 entonces los cosenos directores de v están dados por cos α = v 1 v, cos β = v 2 v, cos γ = v 3 v si restringimos α, β y γ al intervalo [0, π], los ángulos de dirección quedan determinados en forma única por los cosenos directores. Además, es fácil verificar que Consecuentemente cos 2 α + cos 2 β + cos 2 γ = 1. (cos α, cos β, cos γ) = v v, es un vector unitario en la dirección de v.
25 Si los vectores no nulos u, v son paralelos, es decir λ R \ {0} tal que u = λ v, entonces los vectores tienen o bien los mismos cosenos directores, o los cosenos directores de u son los negativos de v. Reciprocamente, si los vectores no nulos u, v tienen los mismos cosenos directores, o bien los cosenos directores de uno de ellos son los negativos de los del otro, entonces u es un múltiplo escalar de v, es decir, u y v son paralelos. Si u = λ v = (λv 1, λv 2, λv 3 ), los cosenos directores de u están dados por cos α = λv 1 λv = ± v 1 v, cos β = λv 2 λv = ± v 2 v, cos γ = λv 3 λv = ± v 3 v en donde el signo se toma positivo si λ > 0, y negativo si λ < 0. Pero estos son los cosenos directores de v o sus negativos.
26 Reciprocamente, si los vectores no nulos u = (u 1, u 2, u 3 ), v = (v 1, v 2, v 3 ) tienen cosenos directores iguales, o bien, los cosenos directores de uno son los negativos del otro, entonces es decir, u 1 u = ± v 1 v, u 2 u = ± v 2 v, u 3 u = ± v 3 v de donde u 1 = ± u 1 v v 1, u 2 = ± u 2 v v 2, u 3 = ± u 3 v v 3 u = ± u v v. Como u y v son vectores no nulos, entonces λ = ± u v es un escalar no nulo, por lo que u es un múltiplo escalar no nulo de v.
27 Concluimos así que Propiedad Los vectores no nulos u y v son paralelos si y sólo si u y v tienen los mismos cosenos directores, o bien, los cosenos directores de u son los negativos de los cosenos directores de v. Si los cosenos directores son iguales, u y v tienen el mismo sentido; si los cosenos directores son los unos el negativo de los otros, u y v tienen sentidos opuestos.
28 Por ejemplo, podemos obtener un vector u con u = 8 y que tiene el mismo sentido que el vector v = (1, 2, 5). Notamos que v = = = 30, por lo que (cos α, cos β, cos γ) = de donde u = u (cos α, cos β, cos γ) = ( v 1 v =, 30 ( 8 30, 2 30, 16 30, ) 5, 30 ) Mientras que el vector w de norma 8 y que tiene sentido opuesto a v es ( w = w (cos α, cos β, cos γ) = 8, 16, 40 )
29 Vectores paralelos y perpendiculares Si u y v son dos vectores no nulos en R 3, entonces el ángulo que forman se puede especificar de la misma manera que el ángulo que forman dos vectores en R 2. Consideremos las representaciones geométricas ordinarias de los vectores u y v
30 Si u y v no son paralelos, entonces los vectores u, v y u v tienen representaciones geométricas que forman un triángulo. Empleando la ley de los cosenos se tiene que de donde u v 2 = u + v 2 u v cos θ 2 u v cos θ = u + v u v 2 = 2 u v esto es cos θ = u v u v.
31 Como consecuencia de lo visto anteriormente, podemos concluir lo siguiente: Propiedad Sean u, v R 3 \ { 0} en posición ordinaria. Los vectores u y v son paralelos si y sólo si forman un ángulo de 0 o π radianes, es decir, si y sólo si cos θ = ±1. Los vecotres u, v son perpendiculares si y sólo si la medida del ángulo comprendido entre ellos es de π/2 radianes, esto es, si y sólo si cos θ = 0, si y sólo si u v = 0. Este último resultado puede extenderse al vector cero, así dos vectores son perpendiculares cuando u v = 0, sean o no u y v el vector cero.
32 La definición de los términos proyección vectorial, componente vectorial, proyección escalar, componente escalar de vectores en R 3 es análoga a la que se hace para vectores en R 2 Consideremos dos vectores no nulos u, v R 3 y el segmento que pasa por el punto final V (x, y, z) de v y que es perpendicular a la recta que contiene al vector u. El vector cuya representación geométrica va del punto inicial de v al pie de la perpendicular antes mencionada recibe el nombre de proyección vectorial de v sobre u, o bien, se dice que es la componente vectorial de v paralela a u. La distancia dirigida formada por la longitud de esta proyección vectorial es la proyección escalar de v sobre u, o la componente escalar de v paralela a u, y se denota con el símbolo Comp u v.
33
34 Es evidente que Comp u v = v cos θ donde θ es el ángulo formado por u y v. Como cos θ = u v u v entonces Comp u v = v cos θ = v u v u v = u v u
35 Por ejemplo, la componente escalar de v = (1, 3, 5) paralela a u = (1, 2, 2) está dada por Comp u v = u v u = (1, 3, 5) (1, 2, 2) (1, 2, 2) = = 5 3
36 El producto vectorial de dos vectores Como consecuencia de lo visto anteriormente, si u = (u 1, u 2, u 3 ) R 3 es un vector no nulo, existe una infinidad de vectores v = (x, y, z) perpendiculares a u, esto es, tales que 0 = u v = u 1 x + u 2 y + u 3 z, para una infinidad de (x, y, z). Por ejemplo, los siguientes vectores son perpendiculares a u y, en general, no son paralelos: (0, u 3, u 2 ), ( u 3, 0, u 1 ), ( u 2, u 1, 0) Por lo que no existe un único vector perpendicular como en R 2 (salvo múltiplos escalares). Cabe entonces preguntarnos, si u = (u 1, u 2, u 3 ) y v = (v 1, v 2, v 3 ) son las representaciones geométricas ordinarias de dos vectores no paralelos habrá un vector no nulo w que sea perpendicular tanto a u como a v? Es decir, si w = (x, y, z), Qué condiciones se deben cumplir para que u w = v w = 0?
37 Claramente, esto nos plantea un sistema homogéneo de dos ecuaciones con tres incógnitas, a saber: u 1 x + u 2 y + u 3 z = 0 v 1 x + v 2 y + v 3 z = 0 o equivalentemente, escribiendo a x y y en términos de z tenemos el sistema no homogéneo 2 2: u 1 x + u 2 y = u 3 z v 1 x + v 2 y = v 3 z
38 Si u 1 u 2 v 1 v 2 0 se puede aplicar la regla de Cramer para obtener la única solución del sistema de ecuaciones anterior, esto es: u 3z u 2 v 3 z v 2 u 1 u 3 z v 1 v 3 z x = u, y = 1 u 2 v 1 v 2 u 1 u 2 v 1 v 2 Como el multiplicar a cada elemento de una columna (o renglón) de un determinante por un escalar es equivalente a multiplicar el determinante por ese escalar, y el intercambiar dos columnas de un determinante es equivalente a multiplicar el determinante por 1 las ecuaciones anteriores se pueden escribir como:
39 u 2 u 3 v 2 v 3 u 3 u 1 v 3 v 1 x = u z, y = 1 u 2 v 1 v 2 u z 1 u 2 v 1 v 2 haciendo z = k u 1 u 2 v 1 v 2, donde k R es una constante arbitraria, podemos escribir esta solución en forma simétrica como ( ) u (x, y, z) = 2 u 3 v 2 v 3, u 3 u 1 v 3 v 1, u 1 u 2 v 1 v 2 Si u 1 u 2 v 1 v 2 = 0 pero uno de los otros determinantes que aparece en esta expresión es diferente de cero, se puede despejar a x y z, o bien, a y y z en términos de la tercera variable, y se obtiene nuevamente la forma simétrica. Por lo tanto
40 Propiedad u = (u 1, u 2, u 3 ) y v = (v 1, v 2, v 3 ) son vectores no nulos, y no todos los determinantes u 2 u 3 v 2 v 3, u 3 u 1 v 3 v 1, u 1 u 2 v 1 v 2 son cero, entonces el vector w = (x, y, z) es perpendicular tanto a u como a v si y sólo si existe λ R tal que (x, y, z) = λ( u v) donde u v = ( u 2 u 3 v 2 v 3, u 3 u 1 v 3 v 1, u 1 u 2 v 1 v 2 )
41 Para cualesquiera dos vectores u = (u 1, u 2, u 3 ) y v = (v 1, v 2, v 3 ) en R 3, el vector u v recibe el nombre de producto vectorial o producto cruz de u y v. Si i = (1, 0, 0), j = (0, 1, 0) y k = (0, 0, 1), entonces u v = u 2 u 3 v 2 v 3 i + u 3 u 1 v 3 v 1 j + u 1 u 2 v 1 v 2 k = i j k u 1 u 2 u 3 v 1 v 2 v 3
42 Propiedades Si u, v, w, r, s sn vectores en, entonces: 1 u v = v u. 2 u ( v + w) = u v + u w Propiedad distributiva. 3 u (λ v) = (λ u) v = λ( u v) para cada λ R. Propiedad asociativa escalar. u 1 u 2 u 3 4 u ( v w) = v 1 v 2 v 3. Este número es el triple w 1 w 2 w 3 producto escalar. 5 ( u v) ( u v) = ( u u)( v v) ( u v) 2. 6 u v = u v sen θ, donde θ es el ángulo formado por u y v. Por lo tanto, si u y v no son paralelos, u v es el área de la región acotada por el paralelogramo la cual dos de sus lados adyacentes son las representaciones geométricas de los vectores u y v. 7 ( u v) ( r s) = ( u r)( v s) ( u s)( v r) Identidad de Lagrange.
43 A continuación demostraremos que las identidades (5) y (6), las demas identidades se dejan como ejercicio: Para cada u, v, w R 3 sabemos que de donde u ( v w) = u 1 u 2 u 3 v 1 v 2 v 3 w 1 w 2 w 3 u v 2 = ( u v) ( u v) u 2 v 3 u 3 v 2 u 3 v 1 u 1 v 3 u 1 v 2 u 2 v 1 = u 1 u 2 u 3 v 1 v 2 v 3 = (u 2 v 3 u 3 v 2 ) u 2 u 3 v 2 v 3 (u 3v 1 u 1 v 3 ) u 1 u 3 v 1 v 3 +(u 1 v 2 u 2 v 1 ) u 1 u 1 v 1 v 2. = (u 2 v 3 u 3 v 2 ) 2 + (u 3 v 1 u 1 v 3 ) 1 + (u 1 v 2 u 2 v 1 ) 2 = ( u u)( v v) ( u v) 2
44 es decir, u v 2 = ( u u)( v v) ( u v) 2. u v 2 = ( u u)( v v) ( u v) 2 = u 2 v 2 ( u v cos θ) 2 = u 2 v 2 (1 cos 2 θ) = u 2 v 2 sen 2 θ Concluimos de aquí que u v = u v sen θ

45 Sabemos que el área A del paralelogramo es A = base altura = u h, pero sen θ =, de donde A = u v sen θ. h v
Planos y Rectas. 19 de Marzo de 2012
 el Geometría en el Planos y Rectas Universidad Autónoma Metropolitana Unidad Iztapalapa 19 de Marzo de 2012 el Anteriormente vimos que es posible encontrar un número infinito de vectores, no paralelos
el Geometría en el Planos y Rectas Universidad Autónoma Metropolitana Unidad Iztapalapa 19 de Marzo de 2012 el Anteriormente vimos que es posible encontrar un número infinito de vectores, no paralelos
Universidad Nacional de Colombia Departamento de Matemáticas Álgebra Lineal - Grupo 1 Resumen Unidad n 3
 Universidad Nacional de Colombia Departamento de Matemáticas 1000003-5 Álgebra Lineal - Grupo 1 Resumen Unidad n 3 Vectores en R n Definición. El conjunto de las n-tuplas ordenadas de números reales se
Universidad Nacional de Colombia Departamento de Matemáticas 1000003-5 Álgebra Lineal - Grupo 1 Resumen Unidad n 3 Vectores en R n Definición. El conjunto de las n-tuplas ordenadas de números reales se
Universidad Nacional de Colombia Departamento de Matemáticas Álgebra Lineal - Grupo 5 Resumen Unidad n 3
 Universidad Nacional de Colombia Departamento de Matemáticas 1000003-5 Álgebra Lineal - Grupo 5 Resumen Unidad n 3 Vectores en R n Definición. El conjunto de las n-tuplas ordenadas de números reales se
Universidad Nacional de Colombia Departamento de Matemáticas 1000003-5 Álgebra Lineal - Grupo 5 Resumen Unidad n 3 Vectores en R n Definición. El conjunto de las n-tuplas ordenadas de números reales se
El espacio euclídeo El espacio vectorial R n. Definición. Conjunto de todas las n-uplas de números reales:
 Lección 1 El espacio euclídeo 1.1. El espacio vectorial R n Definición. Conjunto de todas las n-uplas de números reales: R n = {(x 1,x 2,...,x n ) : x 1,x 2,...,x n R} Nos interesan los casos n = 2 y n
Lección 1 El espacio euclídeo 1.1. El espacio vectorial R n Definición. Conjunto de todas las n-uplas de números reales: R n = {(x 1,x 2,...,x n ) : x 1,x 2,...,x n R} Nos interesan los casos n = 2 y n
VECTORES. también con letras sobre las cuales se coloca una flechita ( a ). A = módulo de A. modulo o magnitud, dirección y sentido. vector.
. A = módulo de A. modulo o magnitud, dirección y sentido. vector.") VECTORES Según su naturaleza las cantidades físicas se clasifican en magnitudes escalares y magnitudes vectoriales Las magnitudes como el tiempo, la temperatura, la masa y otras, son magnitudes escalares
VECTORES Según su naturaleza las cantidades físicas se clasifican en magnitudes escalares y magnitudes vectoriales Las magnitudes como el tiempo, la temperatura, la masa y otras, son magnitudes escalares
3.1. Distancia entre dos puntos. Definición 3.1. Sean a, b e, se llama distancia entre los números a y b que se denota por d (a, b), a la cantidad:
, a la cantidad:") III. UNIDAD: GEOMETRIA ANALITICA LANA. La Geometría Analítica permite usar los métodos algebraicos en la solución de problemas geométricos, recíprocamente, los métodos de la geometría analítica pueden
III. UNIDAD: GEOMETRIA ANALITICA LANA. La Geometría Analítica permite usar los métodos algebraicos en la solución de problemas geométricos, recíprocamente, los métodos de la geometría analítica pueden
Espacios vectoriales reales.
 Tema 3 Espacios vectoriales reales. 3.1 Espacios vectoriales. Definición 3.1 Un espacio vectorial real V es un conjunto de elementos denominados vectores, junto con dos operaciones, una que recibe el nombre
Tema 3 Espacios vectoriales reales. 3.1 Espacios vectoriales. Definición 3.1 Un espacio vectorial real V es un conjunto de elementos denominados vectores, junto con dos operaciones, una que recibe el nombre
Programa de Acceso Inclusivo, Equidad y Permanencia. PAIEP, Universidad de Santiago
 Guía de vectores. Vectores En matemática, un vector es una herramienta geométrica utilizada para representar una magnitud física definida en un sistema de referencia que se caracteriza por tener módulo
Guía de vectores. Vectores En matemática, un vector es una herramienta geométrica utilizada para representar una magnitud física definida en un sistema de referencia que se caracteriza por tener módulo
y cualquier par (x, y) puede escalarse, multiplicarse por un número real s, para obtener otro vector (sx, sy).
 puede escalarse, multiplicarse por un número real s, para obtener otro vector (sx, sy).") UNIDAD II: VECTORES EN DOS Y TRES DIMENSIONES Un espacio vectorial (o espacio lineal) es el objeto básico de estudio en la rama de la matemática llamada álgebra lineal. A los elementos de los espacios
UNIDAD II: VECTORES EN DOS Y TRES DIMENSIONES Un espacio vectorial (o espacio lineal) es el objeto básico de estudio en la rama de la matemática llamada álgebra lineal. A los elementos de los espacios
TEMA 11. VECTORES EN EL ESPACIO
 TEMA 11. VECTORES EN EL ESPACIO Dados dos puntos y, se define el vector como el segmento orientado caracterizado por su módulo, su dirección y su sentido. Dos vectores son equipolentes si tienen el mismo
TEMA 11. VECTORES EN EL ESPACIO Dados dos puntos y, se define el vector como el segmento orientado caracterizado por su módulo, su dirección y su sentido. Dos vectores son equipolentes si tienen el mismo
3.1 El espacio afín R n
 3. Geometría analítica 3.1 El espacio afín R n Consideremos el conjunto R n, formado por las listas ordenadas (x 1,...,x n ) de números reales. Convengamos en llamar puntos a los elementos de R n. Pero
3. Geometría analítica 3.1 El espacio afín R n Consideremos el conjunto R n, formado por las listas ordenadas (x 1,...,x n ) de números reales. Convengamos en llamar puntos a los elementos de R n. Pero
Las variedades lineales en un K-espacio vectorial V pueden definirse como sigue a partir de los subespacios de V.
 Capítulo 9 Variedades lineales Al considerar los subespacios de R 2, vimos que éstos son el conjunto {(0, 0)}, el espacio R 2 y las rectas que pasan por el origen. Ahora, en algunos contextos, por ejemplo
Capítulo 9 Variedades lineales Al considerar los subespacios de R 2, vimos que éstos son el conjunto {(0, 0)}, el espacio R 2 y las rectas que pasan por el origen. Ahora, en algunos contextos, por ejemplo
CÁLCULO VECTORIAL I. B, es un nuevo vector que se define del siguiente modo: Si A ybson (LI), entonces el vector A. B se caracteriza por:
, entonces el vector A. B se caracteriza por:") PRODUCTO VECTORIAL DE DOS VECTORES El producto vectorial de dos vectores A y, y escribimos A, es un nuevo vector que se define del siguiente modo: Si A yson (LI), entonces el vector A se caracteriza por:
PRODUCTO VECTORIAL DE DOS VECTORES El producto vectorial de dos vectores A y, y escribimos A, es un nuevo vector que se define del siguiente modo: Si A yson (LI), entonces el vector A se caracteriza por:
APUNTES DE GEOMETRÍA ANALÍTICA
 CAPÍTULO 1: LA RECTA EN EL PLANO Conceptos Primitivos: Punto, recta, plano. APUNTES DE GEOMETRÍA ANALÍTICA Definición 1 (Segmento) Llamaremos segmento a la porción de una línea recta comprendida entre
CAPÍTULO 1: LA RECTA EN EL PLANO Conceptos Primitivos: Punto, recta, plano. APUNTES DE GEOMETRÍA ANALÍTICA Definición 1 (Segmento) Llamaremos segmento a la porción de una línea recta comprendida entre
APUNTES DE FÍSICA I Profesor: José Fernando Pinto Parra UNIDAD 2 ÁLGEBRA VECTORIAL
 Vectores y escalares. REPÚBLICA BOLIVARIANA DE VENEZUELA APUNTES DE FÍSICA I Profesor: José Fernando Pinto Parra UNIDAD 2 ÁLGEBRA VECTORIAL Las magnitudes escalares son aquellas magnitudes físicas que
Vectores y escalares. REPÚBLICA BOLIVARIANA DE VENEZUELA APUNTES DE FÍSICA I Profesor: José Fernando Pinto Parra UNIDAD 2 ÁLGEBRA VECTORIAL Las magnitudes escalares son aquellas magnitudes físicas que
Problemas de exámenes de Geometría
 1 Problemas de exámenes de Geometría 1. Consideramos los planos π 1 : X = P+λ 1 u 1 +λ 2 u 2 y π 2 : X = Q+µ 1 v 1 +µ 2 v 2. Cuál de las siguientes afirmaciones es incorrecta? a) Si π 1 π 2 Ø, entonces
1 Problemas de exámenes de Geometría 1. Consideramos los planos π 1 : X = P+λ 1 u 1 +λ 2 u 2 y π 2 : X = Q+µ 1 v 1 +µ 2 v 2. Cuál de las siguientes afirmaciones es incorrecta? a) Si π 1 π 2 Ø, entonces
Actividad 8: Lectura Capítulo 5
 Actividad 8: Lectura Capítulo 5 Fecha de inicio Fecha de Cierre 10/OCT/13 00:00 02/NOV/13 23:55 Ángulos y el círculo trigonométrico Ángulos En Geometría se estudiaron los ángulos, clases, propiedades y
Actividad 8: Lectura Capítulo 5 Fecha de inicio Fecha de Cierre 10/OCT/13 00:00 02/NOV/13 23:55 Ángulos y el círculo trigonométrico Ángulos En Geometría se estudiaron los ángulos, clases, propiedades y
GEOMETRÍA EN EL ESPACIO.
 GEOMETRÍA EN EL ESPACIO. Un sistema de coordenadas tridimensional se construye trazando un eje Z, perpendicular en el origen de coordenadas a los ejes X e Y. Cada punto viene determinado por tres coordenadas
GEOMETRÍA EN EL ESPACIO. Un sistema de coordenadas tridimensional se construye trazando un eje Z, perpendicular en el origen de coordenadas a los ejes X e Y. Cada punto viene determinado por tres coordenadas
TEMA 8. GEOMETRÍA ANALÍTICA.
 TEMA 8. GEOMETRÍA ANALÍTICA. 8..- El plano. Definimos el plano euclideo como el conjunto de puntos ( x, y) R. Así, cada punto del plano posee dos coordenadas. Para representar puntos del plano utilizaremos
TEMA 8. GEOMETRÍA ANALÍTICA. 8..- El plano. Definimos el plano euclideo como el conjunto de puntos ( x, y) R. Así, cada punto del plano posee dos coordenadas. Para representar puntos del plano utilizaremos
Tema 3. GEOMETRIA ANALITICA.
 Álgebra lineal. Curso 087-009. Tema. Hoja 1 Tema. GEOMETRIA ANALITICA. 1. Hallar la ecuación de la recta: a) que pase por ( 4, ) y tenga pendiente 1. b) que pase por (0, 5) y tenga pendiente. c) que pase
Álgebra lineal. Curso 087-009. Tema. Hoja 1 Tema. GEOMETRIA ANALITICA. 1. Hallar la ecuación de la recta: a) que pase por ( 4, ) y tenga pendiente 1. b) que pase por (0, 5) y tenga pendiente. c) que pase
LA RECTA Y SUS ECUACIONES
 UNIDAD LA RECTA Y SUS ECUACIONES EJERCICIOS RESUELTOS Objetivo general. Al terminar esta Unidad resolverás ejercicios y problemas correspondientes a las rectas en el plano y sus ecuaciones. Objetivo. Recordarás
UNIDAD LA RECTA Y SUS ECUACIONES EJERCICIOS RESUELTOS Objetivo general. Al terminar esta Unidad resolverás ejercicios y problemas correspondientes a las rectas en el plano y sus ecuaciones. Objetivo. Recordarás
Trigonometría y Análisis Vectorial
 Unidad Educativa enezuela Trigonometría nálisis ectorial Prof. Ronn J. ltuve Unidad Educativa enezuela Trigonometría nálisis ectorial 1. Teorema de Pitágoras: establece que en un triángulo rectángulo el
Unidad Educativa enezuela Trigonometría nálisis ectorial Prof. Ronn J. ltuve Unidad Educativa enezuela Trigonometría nálisis ectorial 1. Teorema de Pitágoras: establece que en un triángulo rectángulo el
Capítulo 8: Vectores
 Capítulo 8: Vectores 1. Lección 30. Operaciones con vectores 1.1. Vectores El concepto de vector aparece en Física para describir magnitudes, tales como la fuerza que actúa sobre un punto, en las que no
Capítulo 8: Vectores 1. Lección 30. Operaciones con vectores 1.1. Vectores El concepto de vector aparece en Física para describir magnitudes, tales como la fuerza que actúa sobre un punto, en las que no
Verifique los resultados analíticos mediante la resolución gráfica usando un software de Matemática.
 Álgebra Geometría Analítica Prof. Gisela Saslavsk Vectores en R en R 3. Rectas planos en el espacio Verifique los resultados analíticos mediante la resolución gráfica usando un software de Matemática..
Álgebra Geometría Analítica Prof. Gisela Saslavsk Vectores en R en R 3. Rectas planos en el espacio Verifique los resultados analíticos mediante la resolución gráfica usando un software de Matemática..
ESTÁTICA 3 3 VECTORES
 ESTÁTICA Sesión 3 3 VECTORES 3.1. Componentes en dos dimensiones 3.1.1. Operación con vectores por sus componentes 3.1.2. Vectores de posición por sus componentes 3.2. Componentes en tres dimensiones 3.2.1.
ESTÁTICA Sesión 3 3 VECTORES 3.1. Componentes en dos dimensiones 3.1.1. Operación con vectores por sus componentes 3.1.2. Vectores de posición por sus componentes 3.2. Componentes en tres dimensiones 3.2.1.
son dos elementos de Rⁿ, definimos su suma, denotada por
 1.1 Definición de un vector en R², R³ y su Interpretación geométrica. 1.2 Introducción a los campos escalares y vectoriales. 1.3 La geometría de las operaciones vectoriales. 1.4 Operaciones con vectores
1.1 Definición de un vector en R², R³ y su Interpretación geométrica. 1.2 Introducción a los campos escalares y vectoriales. 1.3 La geometría de las operaciones vectoriales. 1.4 Operaciones con vectores
1. Algunas deniciones y resultados del álgebra lineal
 . Algunas deniciones y resultados del álgebra lineal Denición. (Espacio vectorial o espacio lineal sobre R) Un espacio vectorial o espacio lineal sobre el campo de los números reales, R, es un conjunto
. Algunas deniciones y resultados del álgebra lineal Denición. (Espacio vectorial o espacio lineal sobre R) Un espacio vectorial o espacio lineal sobre el campo de los números reales, R, es un conjunto
Vectores. en el plano
 7 Vectores 5 en el plano LECTURA INICIAL ESQUEMA INTERNET ACTIVIDAD Los vectores nos dan información en situaciones como el sentido de avance de una barca o la dirección de un trayecto en bicicleta. INICIO
7 Vectores 5 en el plano LECTURA INICIAL ESQUEMA INTERNET ACTIVIDAD Los vectores nos dan información en situaciones como el sentido de avance de una barca o la dirección de un trayecto en bicicleta. INICIO
2. El conjunto de los números complejos
 Números complejos 1 Introducción El nacimiento de los números complejos se debió a la necesidad de dar solución a un problema: no todas las ecuaciones polinómicas poseen una solución real El ejemplo más
Números complejos 1 Introducción El nacimiento de los números complejos se debió a la necesidad de dar solución a un problema: no todas las ecuaciones polinómicas poseen una solución real El ejemplo más
1. Si están situados en rectas paralelas: la recta que une los orígenes, deja sus extremos en un mismo semiplano.
 CAPÍTULO 1 El plano vectorial Consideremos P como el plano intuitivo de puntos: A,,C... 1.1. El espacio vectorial de los vectores Definición 1.1 Vectores fijos Dado dos puntos cualesquiera A e del espacio
CAPÍTULO 1 El plano vectorial Consideremos P como el plano intuitivo de puntos: A,,C... 1.1. El espacio vectorial de los vectores Definición 1.1 Vectores fijos Dado dos puntos cualesquiera A e del espacio
Julio C. Carrillo E. Profesor Escuela de Matemáticas Universidad Industrial de Santander. Monday, November 5, 2007 at 8:44 am (FA07.
 Julio C. Carrillo E. Profesor Escuela de Matemáticas Universidad Industrial de Santander Monday, November 5, 2007 at 8:44 am (FA07.01,02) Para uso exclusivo en el salón de clase. 2007 c Julio C. Carrillo
Julio C. Carrillo E. Profesor Escuela de Matemáticas Universidad Industrial de Santander Monday, November 5, 2007 at 8:44 am (FA07.01,02) Para uso exclusivo en el salón de clase. 2007 c Julio C. Carrillo
I.E.S. Miguel de Cervantes (Granada) Departamento de Matemáticas GBG 1
 Departamento de Matemáticas GBG 1") PRODUCTO ESCALAR INTRODUCCIÓN El espacio vectorial de los vectores libres del plano se caracteriza por tener definidas dos operaciones: una interna, suma de vectores, y otra externa, producto de un número
PRODUCTO ESCALAR INTRODUCCIÓN El espacio vectorial de los vectores libres del plano se caracteriza por tener definidas dos operaciones: una interna, suma de vectores, y otra externa, producto de un número
CÁLCULO II ESCUELA MILITAR DE INGENIERÍA MISCELÁNEAS DE PROBLEMAS VECTORES. 1. Sean A = (1, 2), B = ( 1, 3) y C = (0, 4); hallar: a) A + B
, B = ( 1, 3) y C = (0, 4); hallar: a) A + B") ESCUELA MILITAR DE INGENIERÍA MISCELÁNEAS DE PROBLEMAS CÁLCULO II VECTORES. 1. Sean A = (1, 2), B = ( 1, 3) y C = (0, 4); hallar: a) A + B b) A B + C c) 4A 3B d) 4(A + B) 5C e) 1 2 (A B) + 1 4 C 2. Sean
ESCUELA MILITAR DE INGENIERÍA MISCELÁNEAS DE PROBLEMAS CÁLCULO II VECTORES. 1. Sean A = (1, 2), B = ( 1, 3) y C = (0, 4); hallar: a) A + B b) A B + C c) 4A 3B d) 4(A + B) 5C e) 1 2 (A B) + 1 4 C 2. Sean
Un vector geométrico es un segmento de recta dirigido en el plano o el espacio euclidiano.
 ectores n vector geométrico es un segmento de recta dirigido en el plano o el espacio euclidiano. Diremos que dos vectores son iguales si tienen la misma dirección, magnitud (tamaño) y sentido, sin importar
ectores n vector geométrico es un segmento de recta dirigido en el plano o el espacio euclidiano. Diremos que dos vectores son iguales si tienen la misma dirección, magnitud (tamaño) y sentido, sin importar
ALGEBRA Y GEOMETRIA ANALITICA
 Diplomatura en Ciencia y Tecnología ALGEBRA Y GEOMETRIA ANALITICA SEGUNDO CUATRIMESTRE DE 009 Profesora Mariana Suarez PRACTICA N 8: RECTA EN EL ESPACIO PLANO ALGEBRA Y GEOMETRIA ANALITICA - Segundo cuatrimestre
Diplomatura en Ciencia y Tecnología ALGEBRA Y GEOMETRIA ANALITICA SEGUNDO CUATRIMESTRE DE 009 Profesora Mariana Suarez PRACTICA N 8: RECTA EN EL ESPACIO PLANO ALGEBRA Y GEOMETRIA ANALITICA - Segundo cuatrimestre
Problemas métricos. 1. Problemas afines y problemas métricos
 . Problemas afines y problemas métricos Al trabajar en el espacio (o análogamente en el plano) se nos pueden presentar dos tipos de problemas con los elementos habituales (puntos, rectas y planos): Problemas
. Problemas afines y problemas métricos Al trabajar en el espacio (o análogamente en el plano) se nos pueden presentar dos tipos de problemas con los elementos habituales (puntos, rectas y planos): Problemas
Colegio Internacional Torrequebrada. Departamento de Matemáticas
 Geometría. Problema 1: Calcula la distancia del punto P(1, 1, 1) a la recta Problema 2: Dadas las rectas, se pide: a) Analiza su posición relativa. b) Halla la ecuación general del plano π que contiene
Geometría. Problema 1: Calcula la distancia del punto P(1, 1, 1) a la recta Problema 2: Dadas las rectas, se pide: a) Analiza su posición relativa. b) Halla la ecuación general del plano π que contiene
ELEMENTOS DE GEOMETRÍA. Eduardo P. Serrano
 ELEMENTOS DE GEOMETRÍA Eduardo P. Serrano Este Apunte de Clase está dirigido a los alumnos de la materia Elementos de Cálculo Numérico para Biólogos. Tiene por objeto exponer algunos conceptos básicos
ELEMENTOS DE GEOMETRÍA Eduardo P. Serrano Este Apunte de Clase está dirigido a los alumnos de la materia Elementos de Cálculo Numérico para Biólogos. Tiene por objeto exponer algunos conceptos básicos
Ejercicios Resueltos de Cálculo III.
 Ejercicios Resueltos de Cálculo III. 1.- Considere y. a) Demuestre que las rectas dadas se cortan. Encuentre el punto de intersección. b) Encuentre una ecuación del plano que contiene a esas rectas. Como
Ejercicios Resueltos de Cálculo III. 1.- Considere y. a) Demuestre que las rectas dadas se cortan. Encuentre el punto de intersección. b) Encuentre una ecuación del plano que contiene a esas rectas. Como
Álgebra y Geometría Analítica I - LF 2016 Práctica 1: Algunos elementos de la Geometría Analítica
 Álgebra y Geometría Analítica I - LF 2016 Práctica 1: Algunos elementos de la Geometría Analítica 1. a) Marcar en un eje los puntos a(1);b( 2) y c(4). b) Hallar los puntos simétricos respecto al origen
Álgebra y Geometría Analítica I - LF 2016 Práctica 1: Algunos elementos de la Geometría Analítica 1. a) Marcar en un eje los puntos a(1);b( 2) y c(4). b) Hallar los puntos simétricos respecto al origen
Guía de Rectas en el plano. Prof. Wilson Herrera. 1. Hallar la ecuación de la recta que pasa por el punto a(1, 5) y tiene de pendiente 2.
 y tiene de pendiente 2.") Wilson Herrera 1 Guía de Rectas en el plano. Prof. Wilson Herrera. 1. Hallar la ecuación de la recta que pasa por el punto a(1, 5) y tiene de pendiente 2. 2. Hallar la ecuación de la recta que pasa por
Wilson Herrera 1 Guía de Rectas en el plano. Prof. Wilson Herrera. 1. Hallar la ecuación de la recta que pasa por el punto a(1, 5) y tiene de pendiente 2. 2. Hallar la ecuación de la recta que pasa por
Rectas, planos e hiperplanos
 Semestre -8, Algebra Lineal 37 Rectas, planos e hiperplanos Recta P punto de la recta L, d vector no nulo de R n (vector director de la recta) X punto de la recta L PX paralelo a d (PX = td) PX = OX OP
Semestre -8, Algebra Lineal 37 Rectas, planos e hiperplanos Recta P punto de la recta L, d vector no nulo de R n (vector director de la recta) X punto de la recta L PX paralelo a d (PX = td) PX = OX OP
Conjunto R 3 y operaciones lineales en R 3
 Conjunto R 3 y operaciones lineales en R 3 Objetivos. Definir el conjunto R 3 y operaciones lineales en R 3. Requisitos. Conjunto de los números reales R, propiedades de las operaciones aritméticas en
Conjunto R 3 y operaciones lineales en R 3 Objetivos. Definir el conjunto R 3 y operaciones lineales en R 3. Requisitos. Conjunto de los números reales R, propiedades de las operaciones aritméticas en
Matrices. Operaciones con matrices.
 Matrices. Operaciones con matrices. Ejercicio. Dadas las matrices ( ) ( ) 4 A = B = ( ) C = D = 4 5 ( ) 4 E = F = seleccione las que se pueden sumar y súmelas. Ejercicio. Dadas las matrices ( ) ( ) A =
Matrices. Operaciones con matrices. Ejercicio. Dadas las matrices ( ) ( ) 4 A = B = ( ) C = D = 4 5 ( ) 4 E = F = seleccione las que se pueden sumar y súmelas. Ejercicio. Dadas las matrices ( ) ( ) A =
EJERCICIOS DE SELECTIVIDAD DE GEOMETRIA
 EJERCICIOS DE SELECTIVIDAD DE GEOMETRIA 2003 (4) Ejercicio 1. Considera los vectores u = (1,1,1), v = (2,2,a) y w = (2,0,0), (a) [1'25 puntos] Halla los valores de a para que los vectores u, v y w sean
EJERCICIOS DE SELECTIVIDAD DE GEOMETRIA 2003 (4) Ejercicio 1. Considera los vectores u = (1,1,1), v = (2,2,a) y w = (2,0,0), (a) [1'25 puntos] Halla los valores de a para que los vectores u, v y w sean
Herramientas digitales de auto-aprendizaje para Matemáticas
 real de con Herramientas digitales de auto-aprendizaje para Matemáticas, Grupo de Innovación Didáctica Departamento de Matemáticas Universidad de Extremadura real de con Índice real de con real de con.
real de con Herramientas digitales de auto-aprendizaje para Matemáticas, Grupo de Innovación Didáctica Departamento de Matemáticas Universidad de Extremadura real de con Índice real de con real de con.
Problemas Tema 7 Enunciados de problemas ampliación Temas 5 y 6
 página 1/13 Problemas Tema 7 Enunciados de problemas ampliación Temas 5 y 6 Hoja 1 1. Dado el segmento de extremos A( 7,3) y B(5,11), halla la ecuación de su mediatriz. 2. Halla la distancia del punto
página 1/13 Problemas Tema 7 Enunciados de problemas ampliación Temas 5 y 6 Hoja 1 1. Dado el segmento de extremos A( 7,3) y B(5,11), halla la ecuación de su mediatriz. 2. Halla la distancia del punto
MATEMÁTICASII Curso académico BLOQUE GEOMETRÍA. TEMA 1: VECTORES
 MATEMÁTICASII Curso académico 2015-2016 BLOQUE GEOMETRÍA. TEMA 1: VECTORES 1.1 VECTORES DEL ESPACIO. VECTORES LIBRES DEL ESPACIO Sean y dos puntos del espacio. Llamaremos vector (fijo) a un segmento orientado
MATEMÁTICASII Curso académico 2015-2016 BLOQUE GEOMETRÍA. TEMA 1: VECTORES 1.1 VECTORES DEL ESPACIO. VECTORES LIBRES DEL ESPACIO Sean y dos puntos del espacio. Llamaremos vector (fijo) a un segmento orientado
TEMAS 6 Y 7 RECTAS Y PLANOS EN EL ESPACIO
 Temas 6 y 7 Rectas y planos en el espacio Matemáticas II - 2º Bachillerato 1 TEMAS 6 Y 7 RECTAS Y PLANOS EN EL ESPACIO RECTAS Y PLANOS EJERCICIO 1 : Halla el volumen del tetraedro determinado por los ejes
Temas 6 y 7 Rectas y planos en el espacio Matemáticas II - 2º Bachillerato 1 TEMAS 6 Y 7 RECTAS Y PLANOS EN EL ESPACIO RECTAS Y PLANOS EJERCICIO 1 : Halla el volumen del tetraedro determinado por los ejes
CÁLCULO VECTORIAL I VECTORES EN EL ESPACIO TRIDIMENSIONAL
 VECTORES EN EL ESPACIO TRIDIMENSIONAL DEFINICIÓN DE ESPACIO NUMÉRICO TRIDIMENSIONAL El conjunto de todos los temas ordenados de números reales recibe el nombre de espacio numérico tridimensional, y se
VECTORES EN EL ESPACIO TRIDIMENSIONAL DEFINICIÓN DE ESPACIO NUMÉRICO TRIDIMENSIONAL El conjunto de todos los temas ordenados de números reales recibe el nombre de espacio numérico tridimensional, y se
2.2 Rectas en el plano
 2.2 Al igual que ocurre con el punto, en geometría intrínseca, el concepto de recta no tiene definición, sino que constituye otro de sus conceptos iniciales, indefinibles. Desde luego se trata de un conjunto
2.2 Al igual que ocurre con el punto, en geometría intrínseca, el concepto de recta no tiene definición, sino que constituye otro de sus conceptos iniciales, indefinibles. Desde luego se trata de un conjunto
Capítulo 1 Vectores. 26 Problemas de selección - página 13 (soluciones en la página 99)
") Capítulo 1 Vectores 26 Problemas de selección - página 13 (soluciones en la página 99) 21 Problemas de desarrollo - página 22 (soluciones en la página 100) 11 1.A PROBLEMAS DE SELECCIÓN Sección 1.A Problemas
Capítulo 1 Vectores 26 Problemas de selección - página 13 (soluciones en la página 99) 21 Problemas de desarrollo - página 22 (soluciones en la página 100) 11 1.A PROBLEMAS DE SELECCIÓN Sección 1.A Problemas
Geometría del plano y el espacio
 Geometría del plano y el espacio AMD Grado en Ingeniería Informática AMD Grado en Ingeniería Informática (UM) Geometría del plano y el espacio 1 / 21 Objetivos Al final de este tema tendréis que Conocer
Geometría del plano y el espacio AMD Grado en Ingeniería Informática AMD Grado en Ingeniería Informática (UM) Geometría del plano y el espacio 1 / 21 Objetivos Al final de este tema tendréis que Conocer
Sistemas de Coordenadas
 C.U. UAEM Valle de Teotihuacán Licenciatura en Ingeniería en Computación Sistemas de Coordenadas Unidad de Aprendizaje: Fundamentos de Robótica Unidad de competencia V Elaborado por: M. en I. José Francisco
C.U. UAEM Valle de Teotihuacán Licenciatura en Ingeniería en Computación Sistemas de Coordenadas Unidad de Aprendizaje: Fundamentos de Robótica Unidad de competencia V Elaborado por: M. en I. José Francisco
MÓDULO 8: VECTORES. Física
 MÓDULO 8: VECTORES Física Magnitud vectorial. Elementos. Producto de un vector por un escalar. Operaciones vectoriales. Vector unitario. Suma de vectores por el método de componentes rectangulares. UTN
MÓDULO 8: VECTORES Física Magnitud vectorial. Elementos. Producto de un vector por un escalar. Operaciones vectoriales. Vector unitario. Suma de vectores por el método de componentes rectangulares. UTN
520142: ALGEBRA y ALGEBRA LINEAL
 520142: ALGEBRA y ALGEBRA LINEAL Segundo Semestre 2008, Universidad de Concepción CAPITULO 10: Espacios Vectoriales DEPARTAMENTO DE INGENIERIA MATEMATICA Facultad de Ciencias Físicas y Matemáticas 1 Definición
520142: ALGEBRA y ALGEBRA LINEAL Segundo Semestre 2008, Universidad de Concepción CAPITULO 10: Espacios Vectoriales DEPARTAMENTO DE INGENIERIA MATEMATICA Facultad de Ciencias Físicas y Matemáticas 1 Definición
Proyecto. Tema 6 sesión 2: Generación de Rectas, Circunferencias y Curvas. Geometría Analítica. Isidro Huesca Zavaleta
 Geometría Analítica Tema 6 sesión 2: Generación de Rectas, Circunferencias y Curvas Isidro Huesca Zavaleta La Integración de dos Ciencias La Geometría Analítica nació de la integración de dos ciencias
Geometría Analítica Tema 6 sesión 2: Generación de Rectas, Circunferencias y Curvas Isidro Huesca Zavaleta La Integración de dos Ciencias La Geometría Analítica nació de la integración de dos ciencias
LA CIRCUNFERENCIA. La circunferencia es la sección producida por un plano perpendicular al eje.
 LA CIRCUNFERENCIA La circunferencia es la sección producida por un plano perpendicular al eje. β = 90º La circunferencia es un caso particular de elipse. Se llama circunferencia al lugar geométrico de
LA CIRCUNFERENCIA La circunferencia es la sección producida por un plano perpendicular al eje. β = 90º La circunferencia es un caso particular de elipse. Se llama circunferencia al lugar geométrico de
MATEMÁTICAS II TEMA 6 Planos y rectas en el espacio. Problemas de ángulos, paralelismo y perpendicularidad, simetrías y distancias
 Geometría del espacio: problemas de ángulos y distancias; simetrías MATEMÁTICAS II TEMA 6 Planos y rectas en el espacio Problemas de ángulos, paralelismo y perpendicularidad, simetrías y distancias Ángulos
Geometría del espacio: problemas de ángulos y distancias; simetrías MATEMÁTICAS II TEMA 6 Planos y rectas en el espacio Problemas de ángulos, paralelismo y perpendicularidad, simetrías y distancias Ángulos
VECTORES vector Vector posición par ordenado A(a, b) representa geométricamente segmento de recta dirigido componentes del vector
 representa geométricamente segmento de recta dirigido componentes del vector") VECTORES Un vector (Vector posición) en el plano es un par ordenado de números reales A(a, b). Se representa geométricamente por un segmento de recta dirigido, cuyo punto inicial es el origen del sistema
VECTORES Un vector (Vector posición) en el plano es un par ordenado de números reales A(a, b). Se representa geométricamente por un segmento de recta dirigido, cuyo punto inicial es el origen del sistema
TEMA 11: VECTORES EN EL ESPACIO
 Matemáticas º Bachillerato. Geometría Analítica TEMA : VECTORES EN EL ESPACIO. VECTORES EN EL ESPACIO OPERACIONES CON VECTORES. BASE DEL CONJUNTO DE VECTORES DEL ESPACIO. PRODUCTO ESCALAR DE DOS VECTORES
Matemáticas º Bachillerato. Geometría Analítica TEMA : VECTORES EN EL ESPACIO. VECTORES EN EL ESPACIO OPERACIONES CON VECTORES. BASE DEL CONJUNTO DE VECTORES DEL ESPACIO. PRODUCTO ESCALAR DE DOS VECTORES
El ente básico de la parte de la matemática conocida como ANÁLISIS, lo constituye el llamado sistema de los número reales.
 EL SISTEMA DE LOS NÚMEROS REALES Introducción El ente básico de la parte de la matemática conocida como ANÁLISIS, lo constituye el llamado sistema de los número reales. Números tales como:1,3, 3 5, e,
EL SISTEMA DE LOS NÚMEROS REALES Introducción El ente básico de la parte de la matemática conocida como ANÁLISIS, lo constituye el llamado sistema de los número reales. Números tales como:1,3, 3 5, e,
Una operación interna: Suma Una operación externa: Multiplicación por un escalar
 El conjunto R n Es el conjunto de las n-adas formadas por el producto cartesiano RRR.R, donde R es el conjunto de los números reales. Así pues, dos elementos X y Y de R n serán iguales si y solo si tienen
El conjunto R n Es el conjunto de las n-adas formadas por el producto cartesiano RRR.R, donde R es el conjunto de los números reales. Así pues, dos elementos X y Y de R n serán iguales si y solo si tienen
LEYES DE COMPOSICIÓN INTERNA Y ELEMENTOS DISTINGUIDOS
 LEYES DE COMPOSICIÓN INTERNA Y ELEMENTOS DISTINGUIDOS Sea una estructura formada por un conjunto A, sobre cuyos elementos se ha definido una operación o ley interna, comúnmente denotada por " * ", que
LEYES DE COMPOSICIÓN INTERNA Y ELEMENTOS DISTINGUIDOS Sea una estructura formada por un conjunto A, sobre cuyos elementos se ha definido una operación o ley interna, comúnmente denotada por " * ", que
ÁLGEBRA Y GEOMETRÍA ANALÍTICA Trabajo Práctico Nº 5 Recta y Plano Cursada 2014
 ÁLGEBRA Y GEOMETRÍA ANALÍTICA Trabajo Práctico Nº Recta Plano Cursada Desarrollo Temático de la Unidad La recta en el plano: su determinación. Distintas formas de la ecuación de la recta a partir de la
ÁLGEBRA Y GEOMETRÍA ANALÍTICA Trabajo Práctico Nº Recta Plano Cursada Desarrollo Temático de la Unidad La recta en el plano: su determinación. Distintas formas de la ecuación de la recta a partir de la
LA RECTA Y SUS ECUACIONES
 UNIDAD 1 LA RECTA Y SUS ECUACIONES PROBLEMAS PROPUESTOS Objetivo general. Al terminar esta Unidad resolverás ejercicios y problemas correspondientes a las rectas en el plano y sus ecuaciones. Objetivos
UNIDAD 1 LA RECTA Y SUS ECUACIONES PROBLEMAS PROPUESTOS Objetivo general. Al terminar esta Unidad resolverás ejercicios y problemas correspondientes a las rectas en el plano y sus ecuaciones. Objetivos
Matemáticas II Bachillerato Ciencias y Tecnología 2º Curso ESPACIO AFÍN Introducción Ecuaciones de la recta...
 Unidad 5 ESPACIO AFÍN 5.. Introducción.... - - 5.. Ecuaciones de la recta.... - - 5.3. Ecuaciones del plano.... - 4-5.4. Posiciones relativas (Incidencia y paralelismo).... - 6 - Anexo I.- EJERCICIOS...
Unidad 5 ESPACIO AFÍN 5.. Introducción.... - - 5.. Ecuaciones de la recta.... - - 5.3. Ecuaciones del plano.... - 4-5.4. Posiciones relativas (Incidencia y paralelismo).... - 6 - Anexo I.- EJERCICIOS...
UNIDAD DE APRENDIZAJE II
 UNIDAD DE APRENDIZAJE II Saberes procedimentales 1. Emplea de manera sistemática conceptos algebraicos, geométricos, trigonométricos y de geometría analítica. 2. Relaciona una ecuación algebraica con a
UNIDAD DE APRENDIZAJE II Saberes procedimentales 1. Emplea de manera sistemática conceptos algebraicos, geométricos, trigonométricos y de geometría analítica. 2. Relaciona una ecuación algebraica con a
a) La ecuación del plano que pasa por el punto ( 1, 1, 0 ). (3 puntos) b) La ecuación del plano que es paralelo a la recta r.
 La ecuación del plano que pasa por el punto ( 1, 1, 0 ). (3 puntos) b) La ecuación del plano que es paralelo a la recta r.") PROBLEMAS DE SELECTIVIDAD. BLOQUE GEOMETRÍA 1. En el espacio se dan las rectas Obtener a) El valor de para el que las rectas r y s están contenidas en un plano. (4 puntos) b) La ecuación del plano que
PROBLEMAS DE SELECTIVIDAD. BLOQUE GEOMETRÍA 1. En el espacio se dan las rectas Obtener a) El valor de para el que las rectas r y s están contenidas en un plano. (4 puntos) b) La ecuación del plano que
NOCIONES PRELIMINARES (*) 1
 1") CONJUNTOS NOCIONES PRELIMINARES (*) 1 Conjunto no es un término definible, pero da idea de una reunión de cosas ( elementos ) que tienen algo en común. En matemática los conjuntos se designan con letras
CONJUNTOS NOCIONES PRELIMINARES (*) 1 Conjunto no es un término definible, pero da idea de una reunión de cosas ( elementos ) que tienen algo en común. En matemática los conjuntos se designan con letras
Algebra lineal y conjuntos convexos
 Apéndice A Algebra lineal y conjuntos convexos El método simplex que se describirá en el Tema 2 es de naturaleza algebraica y consiste en calcular soluciones de sistemas de ecuaciones lineales y determinar
Apéndice A Algebra lineal y conjuntos convexos El método simplex que se describirá en el Tema 2 es de naturaleza algebraica y consiste en calcular soluciones de sistemas de ecuaciones lineales y determinar
ALGEBRA. Escuela Politécnica Superior de Málaga
 ALGEBRA. Escuela Politécnica Superior de Málaga Tema 1. Espacios Vectoriales. Sistemas de ecuaciones. Espacio vectorial. Espacios vectoriales R n. Dependencia e independencia lineal. Base. Matrices y determinantes.
ALGEBRA. Escuela Politécnica Superior de Málaga Tema 1. Espacios Vectoriales. Sistemas de ecuaciones. Espacio vectorial. Espacios vectoriales R n. Dependencia e independencia lineal. Base. Matrices y determinantes.
CARÁCTER DE LA GEOMETRÍA ANALÍTICA
 CARÁCTER DE LA GEOMETRÍA ANALÍTICA La Geometría Elemental, conocida a por el estudiante, se denomina también Geometría PURA para distinguirla del presente estudio. Recordaremos que por medio de un sistema
CARÁCTER DE LA GEOMETRÍA ANALÍTICA La Geometría Elemental, conocida a por el estudiante, se denomina también Geometría PURA para distinguirla del presente estudio. Recordaremos que por medio de un sistema
ESPACIO AFÍN REAL TRIDIMENSIONAL. Sistema de referencia (E3, V3, f). Coordenadas cartesianas.
. Coordenadas cartesianas.") 1. Puntos y Vectores. ESPACIO AFÍN REAL TRIDIMENSIONAL Sistema de referencia (E3, V3, f). Coordenadas cartesianas. 2. Primeros resultados analíticos. Vector que une dos puntos. Punto medio de un segmento.
1. Puntos y Vectores. ESPACIO AFÍN REAL TRIDIMENSIONAL Sistema de referencia (E3, V3, f). Coordenadas cartesianas. 2. Primeros resultados analíticos. Vector que une dos puntos. Punto medio de un segmento.
Conceptos básicos de Geometría
 Dr. Eduardo A. RODRÍGUEZ TELLO CINVESTAV-Tamaulipas 15 de enero del 2013 Dr. Eduardo RODRÍGUEZ T. (CINVESTAV) 15 de enero del 2013 1 / 25 1 Geometría Afín Geometría Euclidiana Áreas y ángulos Dr. Eduardo
Dr. Eduardo A. RODRÍGUEZ TELLO CINVESTAV-Tamaulipas 15 de enero del 2013 Dr. Eduardo RODRÍGUEZ T. (CINVESTAV) 15 de enero del 2013 1 / 25 1 Geometría Afín Geometría Euclidiana Áreas y ángulos Dr. Eduardo
en dos dimensiones como objetos que tienen magnitud, dirección y su representación geométrica.
 1 N.SN.11.1.1 Define vectores en dos dimensiones como objetos que tienen magnitud, dirección y su representación geométrica. Vectores Unidad 4: Vectores Tema 1: Vectores Lección 1: Definición 11 Introducción
1 N.SN.11.1.1 Define vectores en dos dimensiones como objetos que tienen magnitud, dirección y su representación geométrica. Vectores Unidad 4: Vectores Tema 1: Vectores Lección 1: Definición 11 Introducción
GEOMETRÍA. que pasa por el punto P y es paralelo a π. (0,9 puntos) b) Determinar la ecuación del plano π
 b) Determinar la ecuación del plano π") GEOMETRÍA 1.- Se considera la recta r : ( x, y, z) = ( t + 1, t,3 t), el plano π: x y z = 0y el punto P (1,1,1). Se pide: a) Determinar la ecuación del plano π 1 que pasa por el punto P y es paralelo a
GEOMETRÍA 1.- Se considera la recta r : ( x, y, z) = ( t + 1, t,3 t), el plano π: x y z = 0y el punto P (1,1,1). Se pide: a) Determinar la ecuación del plano π 1 que pasa por el punto P y es paralelo a
GEOMETRÍA ANALÍTICA EJERCITARIO DE FACULTAD DE INGENIERÍA CURSO PREPARATORIO DE INGENIERÍA (CPI) UNIVERSIDAD NACIONAL DE ASUNCIÓN
 UNIVERSIDAD NACIONAL DE ASUNCIÓN") UNIVERSIDAD NACIONAL DE ASUNCIÓN FACULTAD DE INGENIERÍA CURSO PREPARATORIO DE INGENIERÍA (CPI) EJERCITARIO DE GEOMETRÍA ANALÍTICA (ÁLGEBRA VECTORIAL - PRÁCTICA) AÑO 2014 ÁLGEBRA VECTORIAL - EJERCICIOS
UNIVERSIDAD NACIONAL DE ASUNCIÓN FACULTAD DE INGENIERÍA CURSO PREPARATORIO DE INGENIERÍA (CPI) EJERCITARIO DE GEOMETRÍA ANALÍTICA (ÁLGEBRA VECTORIAL - PRÁCTICA) AÑO 2014 ÁLGEBRA VECTORIAL - EJERCICIOS
PAU Madrid. Matemáticas II. Año Examen modelo. Opción A. Ejercicio 1. Valor: 2 puntos.
 PAU Madrid. Matemáticas II. Año 22. Examen modelo. Opción A. Ejercicio 1. Valor: 2 puntos. Se considera una varilla AB de longitud 1. El extremo A de esta varilla recorre completamente la circunferencia
PAU Madrid. Matemáticas II. Año 22. Examen modelo. Opción A. Ejercicio 1. Valor: 2 puntos. Se considera una varilla AB de longitud 1. El extremo A de esta varilla recorre completamente la circunferencia
Vectores. Instituto Politécnico Nacional Escuela Superior de Ingeniería Mecánica y Eléctrica. Unidad Culhuacán.
 Instituto Politécnico Nacional Escuela Superior de Ingeniería Mecánica y Eléctrica. Unidad Culhuacán. Vectores Autor: Ing. Jonathan Alejandro Cortés Montes de Oca. Vectores En el campo de estudio del Cálculo
Instituto Politécnico Nacional Escuela Superior de Ingeniería Mecánica y Eléctrica. Unidad Culhuacán. Vectores Autor: Ing. Jonathan Alejandro Cortés Montes de Oca. Vectores En el campo de estudio del Cálculo
MATEMÁTICAS 1º BACH. C. N. Y S. 25 de enero de 2010 Geometría y Logaritmos
 MATEMÁTICAS 1º BACH. C. N. Y S. 5 de enero de 010 Geometría y Logaritmos x yz 1) Tomar logaritmos, y desarrollar, en la siguiente expresión: A 4 ab log x log b 4log a log y ) Quitar logaritmos: log A )
MATEMÁTICAS 1º BACH. C. N. Y S. 5 de enero de 010 Geometría y Logaritmos x yz 1) Tomar logaritmos, y desarrollar, en la siguiente expresión: A 4 ab log x log b 4log a log y ) Quitar logaritmos: log A )
ANÁLISIS VECTORIAL. Contenido. Magnitudes escalares y vectoriales Definiciones Escalar Vector Sistemas de Coordenadas
 ANÁLISIS VECTORIAL Contenido Magnitudes escalares y vectoriales Definiciones Escalar Vector Sistemas de Coordenadas Álgebra vectorial Definiciones Suma/Resta de vectores Producto/Cociente de un escalar
ANÁLISIS VECTORIAL Contenido Magnitudes escalares y vectoriales Definiciones Escalar Vector Sistemas de Coordenadas Álgebra vectorial Definiciones Suma/Resta de vectores Producto/Cociente de un escalar
Unidad 5: Geometría Analítica
 Unidad 5 Geometría Analítica 5. Ecuaciones de una recta Los planos y las rectas son objetos geométricos que se pueden representar mediante ecuaciones. Encontraremos la ecuación vectorial de una recta r
Unidad 5 Geometría Analítica 5. Ecuaciones de una recta Los planos y las rectas son objetos geométricos que se pueden representar mediante ecuaciones. Encontraremos la ecuación vectorial de una recta r
The shortest path between two truths in the real domain passes through the complex domain.
 The shortest path etween two truths in the real domain passes through the complex domain. Jacques Hadamard Introducción En este ejercicio vamos a emprender un enfoque distinto de la geometría analítica
The shortest path etween two truths in the real domain passes through the complex domain. Jacques Hadamard Introducción En este ejercicio vamos a emprender un enfoque distinto de la geometría analítica
Problema a) En un triángulo rectángulo OAB una recta r paralela a la hipotenusa corta a los catetos OA y OB en los puntos A y B respectivamente.
 En un triángulo rectángulo OAB una recta r paralela a la hipotenusa corta a los catetos OA y OB en los puntos A y B respectivamente.") Problema 717.- a) En un triángulo rectángulo OAB una recta r paralela a la hipotenusa corta a los catetos OA y OB en los puntos A y B respectivamente. Hallar el lugar geométrico de los puntos comunes a
Problema 717.- a) En un triángulo rectángulo OAB una recta r paralela a la hipotenusa corta a los catetos OA y OB en los puntos A y B respectivamente. Hallar el lugar geométrico de los puntos comunes a
Geometría Analítica Agosto 2016
 Laboratorio #1 Distancia entre dos puntos I.- Demostrar que los puntos dados no son colineales. 1) A (0, 5), B(3, 1), C( 11, 27) 2) A (1, 4), B( 2, 10), C(5, 5) II.- Demostrar que los puntos dados forman
Laboratorio #1 Distancia entre dos puntos I.- Demostrar que los puntos dados no son colineales. 1) A (0, 5), B(3, 1), C( 11, 27) 2) A (1, 4), B( 2, 10), C(5, 5) II.- Demostrar que los puntos dados forman
Matrices, Determinantes y Sistemas Lineales.
 12 de octubre de 2014 Matrices Una matriz A m n es una colección de números ordenados en filas y columnas a 11 a 12 a 1n f 1 a 21 a 22 a 2n f 2....... a m1 a m2 a mn f m c 1 c 2 c n Decimos que la dimensión
12 de octubre de 2014 Matrices Una matriz A m n es una colección de números ordenados en filas y columnas a 11 a 12 a 1n f 1 a 21 a 22 a 2n f 2....... a m1 a m2 a mn f m c 1 c 2 c n Decimos que la dimensión
FACULTAD DE INGENIERIA. ESTABILIDAD I A Sistemas de fuerzas concentradas. Principios de la estática
 FACULTAD DE INGENIERIA ESTABILIDAD I A Sistemas de fuerzas concentradas. Principios de la estática 1 Mecánica: Rama de la física que se ocupa del estado de reposo o movimiento de cuerpos sometidos a la
FACULTAD DE INGENIERIA ESTABILIDAD I A Sistemas de fuerzas concentradas. Principios de la estática 1 Mecánica: Rama de la física que se ocupa del estado de reposo o movimiento de cuerpos sometidos a la
Repaso de Vectores. Autor: Dra. Estela González. flecha. La longitud de la línea indica la magnitud del vector, y su
 Autor: Dra. Estela González Algunas cantidades físicas como tiempo, temperatura, masa, densidad y carga eléctrica se pueden describir plenamente con un número y una unidad, pero otras cantidades (también
Autor: Dra. Estela González Algunas cantidades físicas como tiempo, temperatura, masa, densidad y carga eléctrica se pueden describir plenamente con un número y una unidad, pero otras cantidades (también
GEOMETRÍA. (x 1) 2 +(y 2) 2 =1. Razónalo. x y + z = 2. :3x 3z +1= 0 es doble de la distancia al plano π 2. : x + y 1= 0. Razónalo.
 2 +(y 2) 2 =1. Razónalo. x y + z = 2. :3x 3z +1= 0 es doble de la distancia al plano π 2. : x + y 1= 0. Razónalo.") GEOMETRÍA 1. (Junio, 1994) Sin resolver el sistema, determina si la recta x +3y +1= 0 es exterior, secante o tangente a la circunferencia (x 1) +(y ) =1. Razónalo.. (Junio, 1994) Dadas las ecuaciones de
GEOMETRÍA 1. (Junio, 1994) Sin resolver el sistema, determina si la recta x +3y +1= 0 es exterior, secante o tangente a la circunferencia (x 1) +(y ) =1. Razónalo.. (Junio, 1994) Dadas las ecuaciones de
Resuelve. Unidad 4. Vectores en el espacio. BACHILLERATO Matemáticas II. Diagonal de un ortoedro y volumen de un paralelepípedo.
 Resuelve Página Diagonal de un ortoedro y volumen de un paralelepípedo. Expresa la diagonal de un ortoedro en función de sus dimensiones, a, b y c. c b a c c b b a Diagonal = a + b + c. Calcula el volumen
Resuelve Página Diagonal de un ortoedro y volumen de un paralelepípedo. Expresa la diagonal de un ortoedro en función de sus dimensiones, a, b y c. c b a c c b b a Diagonal = a + b + c. Calcula el volumen
PROBLEMAS RESUELTOS SELECTIVIDAD ANDALUCÍA 2011 MATEMÁTICAS II TEMA 3: ESPACIO AFIN Y EUCLIDEO
 PROBLEMAS RESUELTOS SELECTIVIDAD ANDALUCÍA 0 MATEMÁTICAS II TEMA 3: ESPACIO AFIN Y EUCLIDEO Junio, Ejercicio 4, Opción A Junio, Ejercicio 4, Opción B Reserva, Ejercicio 4, Opción A Reserva, Ejercicio 4,
PROBLEMAS RESUELTOS SELECTIVIDAD ANDALUCÍA 0 MATEMÁTICAS II TEMA 3: ESPACIO AFIN Y EUCLIDEO Junio, Ejercicio 4, Opción A Junio, Ejercicio 4, Opción B Reserva, Ejercicio 4, Opción A Reserva, Ejercicio 4,
1. Operaciones con vectores
 1. OPERACIONES CON VECTORES Academia Nakis (Lugones)684-61-61-03. 1 Resumen Geometría en 3D 1. Operaciones con vectores Sean los vectores W 1 = (a 1, b 1, c 1 ),W 2 = (a 2, b 2, c 2 ),W 3 = (a 3, b 3,
1. OPERACIONES CON VECTORES Academia Nakis (Lugones)684-61-61-03. 1 Resumen Geometría en 3D 1. Operaciones con vectores Sean los vectores W 1 = (a 1, b 1, c 1 ),W 2 = (a 2, b 2, c 2 ),W 3 = (a 3, b 3,
open green road Guía Matemática VECTORES tutora: Jacky Moreno .co
 Guía Matemática VECTORES tutora: Jacky Moreno.co open green 1. Cantidades vectoriales y escalares En general, dentro de las matem aticas, estamos acostumbrados a trabajar con magnitudes que quedan conocidas
Guía Matemática VECTORES tutora: Jacky Moreno.co open green 1. Cantidades vectoriales y escalares En general, dentro de las matem aticas, estamos acostumbrados a trabajar con magnitudes que quedan conocidas
Bloque 2. Geometría. 3. La recta. 1. Definición de recta
 Bloque 2. Geometría 3. La recta 1. Definición de recta Para representar puntos en un plano (superficie de dos dimensiones) utilizamos dos rectas graduadas y perpendiculares, cuyo corte es el punto 0 de
Bloque 2. Geometría 3. La recta 1. Definición de recta Para representar puntos en un plano (superficie de dos dimensiones) utilizamos dos rectas graduadas y perpendiculares, cuyo corte es el punto 0 de
Fundamentos matemáticos. Tema 3 Geometría del plano y del espacio
 Fundamentos matemáticos Grado en Ingeniería agrícola y del medio rural Tema 3 Geometría del plano y del espacio José Barrios García Departamento de Análisis Matemático Universidad de La Laguna jbarrios@ull.es
Fundamentos matemáticos Grado en Ingeniería agrícola y del medio rural Tema 3 Geometría del plano y del espacio José Barrios García Departamento de Análisis Matemático Universidad de La Laguna jbarrios@ull.es
TEMA 9.- TRANSFORMACIONES EN EL PLANO.
 GEOMETRÍ: 5.- TRNSFORMIONES EN EL PLNO TEM 9.- TRNSFORMIONES EN EL PLNO. Definición 9.1.- Llamaremos transformación geométrica en el plano a una operación u operaciones geométricas que permiten deducir
GEOMETRÍ: 5.- TRNSFORMIONES EN EL PLNO TEM 9.- TRNSFORMIONES EN EL PLNO. Definición 9.1.- Llamaremos transformación geométrica en el plano a una operación u operaciones geométricas que permiten deducir
EJERCICIOS DE GEOMETRÍA
 1) Sean las rectas EJERCICIOS DE GEOMETRÍA x 2y 6z 1 r : x y 0 x y 1 s: z 2 a a) Determinar la posición relativa de r y s según los valores de a. b) Calcular la distancia entre las rectas r y s cuando
1) Sean las rectas EJERCICIOS DE GEOMETRÍA x 2y 6z 1 r : x y 0 x y 1 s: z 2 a a) Determinar la posición relativa de r y s según los valores de a. b) Calcular la distancia entre las rectas r y s cuando
TEMA 6. ECUACIONES DE LA RECTA
 TEMA 6. ECUACIONES DE LA RECTA Dados un punto y un vector, vamos a hallar las ecuaciones de la recta r que pasa por el punto A y es paralela al vector. Sea consideramos los vectores un punto cualquiera
TEMA 6. ECUACIONES DE LA RECTA Dados un punto y un vector, vamos a hallar las ecuaciones de la recta r que pasa por el punto A y es paralela al vector. Sea consideramos los vectores un punto cualquiera
CÁLCULO VECTORIAL PRODUCTO ESCALAR (PRODUCTO PUNTO) El producto escalar de dos vectores no nulos es cero si y solamente si ambos son perpendiculares.
 El producto escalar de dos vectores no nulos es cero si y solamente si ambos son perpendiculares.") PRODUCTO ESCALAR (PRODUCTO PUNTO) El producto escalar de dos vectores A yb, denotado por A B, se define como el número (un escalar, no un vector) que se obtiene del siguiente modo. Ai B = A B cos ( A,
PRODUCTO ESCALAR (PRODUCTO PUNTO) El producto escalar de dos vectores A yb, denotado por A B, se define como el número (un escalar, no un vector) que se obtiene del siguiente modo. Ai B = A B cos ( A,