Estimación de Estados Observadores Reducidos o de Orden Mínimo. Fernando di Sciascio (2016)
|
|
|
- Gloria García San Segundo
- hace 5 años
- Vistas:
Transcripción
1 Estimación de Estados Observadores Reducidos o de Orden Mínimo Fernando di Sciascio (206)
2 Observadores reducidos o de orden mínimo o El vector de estado x(t) es de dimensión n y la salida y(t) es un escalar medible que se expresa como una combinación lineal de las variables de estado (y(t)=cx(t)). Por lo que no necesitan estimarse las n variables de estado, sino sólo n-. Así, el observador de orden reducido se vuelve un observador de (n-)-ésimo orden. 2
3 Procedimiento de diseño de un observador reducido Paso ) El modelo de estados ( A, B, C, D ) se transforma a la forma Canónica Controlable b o beta ( A, B, C, D ). En estas coordenadas la salida queda como el primer estado (así, no es necesario construir un observador para estimar todo el estado, sino solamente los n - restantes). Si el par (A,C) es observable, usamos la matriz de observabilidad (que es no singular) como matriz de transformación o cambio de base llevamos la planta original a la forma Canónica Controlable b (FCCb). n C CA CA T A A a a a a 0 2 n 3
4 B a a2 an b0 a a 0 b n n n 2 n a b b M - b C C 0 0 0, D 0 n B Donde los coeficientes se obtienen de la función de transferencia Gs () n n n 0 n n 0 Ys () bns b s b s b Us () n s a s a s a El cambio de base a la FCCb se hace teniendo en cuenta que la matriz de transformación es la matriz de observabilidad del sistema original. 4
5 Paso 2) Se particiona el vector de estados x en dos partes xa (un escalar) y xb [un vector de dimensión (n-)]. Aquí la variable de estado xa es igual a la salida y de modo que se mide directamente, y xb es la parte no medible del vector de estado. De esta forma, el estado particionado y las ecuaciones de salida son xa( t) Aaa Aab xa( t) Ba ut () x ( t) A A x ( t) B b ba bb b b yt ( ) 0 n x a () t x () t b Paso 3) Se determina la matriz de ganancia del observador L,, 2,..., n- son los valores propios deseados para el observador de orden mínimo. si A LA ( s )( s ) ( s ) bb ab 2 n n n 2 n 2 0 s s s 0 5
6 Determinación de la matriz de ganancia del observador de orden reducido L con MATLAB Debido a la dualidad del diseño de asignación de polos y del observador, se puede aplicar el mismo algoritmo a ambos problemas. Así los comandos de Matlab acker y place se pueden utilizar para determinar la matriz de ganancia del observador L. T T T bb ab 2 n L acker( A, A,[ ]) Donde, 2,..., n- son valores propios deseados para el observador de orden mínimo. También se puede utilizar T T T bb ab 2 n L place( A, A,[ ]) 6
7 Paso 4) Se construye el siguiente sistema de orden n que genera una estima asintótica de x(t). ( t) Aˆ ( t) Fu ˆ ( t) By ˆ ( t) Aˆ ( t) Fˆ u() t Bˆ yt () y( t) 0 n ( t) ( t) xˆ( t) Cˆ Dˆ Cˆ ( t) Dy ˆ ( t) ( t) Ly( t) I L y( t) y( t) n donde Aˆ A LA bb Bˆ AL ˆ A LA ba Fˆ B LB b ab a aa Cˆ Dˆ 0 L n I n 7
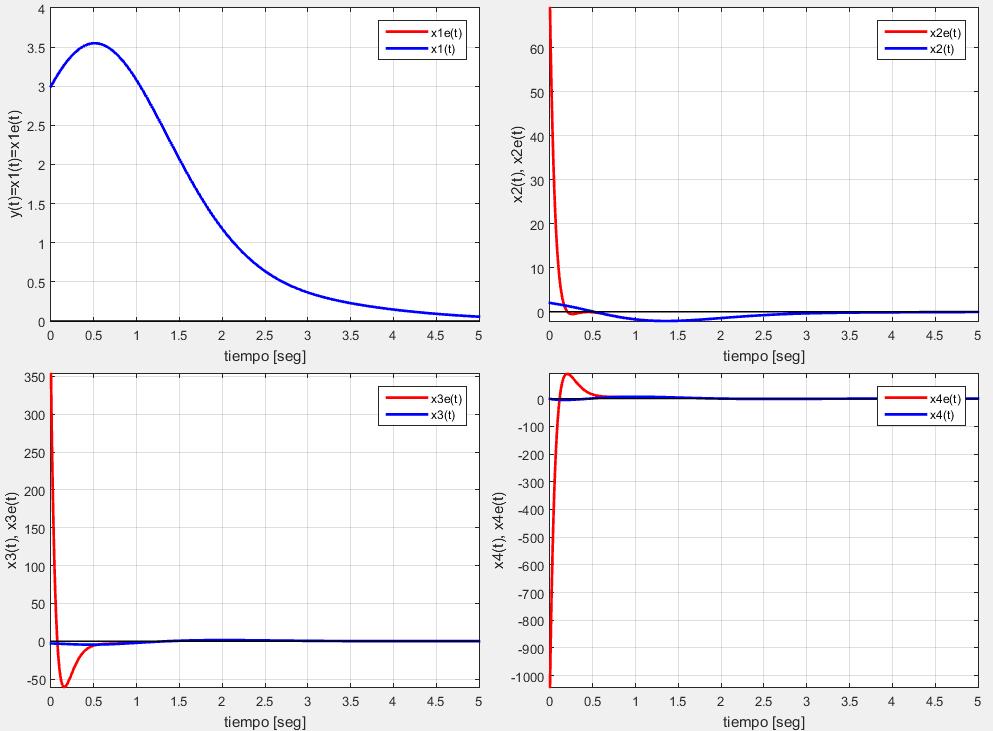
8 El diseño anterior lo verificamos en una simulación sin realimentación de los estados. El scripts siguiente simula este caso. 8
9 clear, clc, close all planta_original=ss(zpk([-2+2i -2-2i],[ i -.5-2i -3],2.344)); [A,B,C,D]=ssdata(planta_original); % OBSERVADOR DE ORDEN REDUCIDO % ) Se pasa la planta a la FCCb. [Acc,Bcc,Ccc,Dcc]=ss2ss(A,B,C,D,obsv(A,C)); planta_fccb=ss(acc,bcc,ccc,dcc); x0=[ ]; % Condiciones iniciales % Realizo la partición de las matrices Acc y Bcc Aaa=Acc(,); Aab=Acc(,2:end); Aba=Acc(2:end,); Abb=Acc(2:end,2:end); Ba=Bcc(); Bb=Bcc(2:end); %Se especifican los autovalores deseados del observador y se determina L lambdas_obs=[ ]; L=acker(Abb',Aab',lambdas_obs)'; % Calculo las matrices y vectores con sombrero (hat)ahat, Bhat, Chat, Dhat, Fhat Ahat=Abb-L*Aab; Bhat=Ahat*L+Aba-L*Aaa; Chat=[zeros(,length(A)-);eye(length(A)-)]; Dhat=[;L]; Fhat=Bb-L*Ba; observer=ss(ahat,[bhat Fhat],eye(length(A)-),zeros(length(A)-,2)); % Se simula la planta ya que se necesita y(t) t=[0:0.0:5];u=zeros(length(t),); [y,t,x]=lsim(planta_fccb,u,t, x0); % Se simula el observador [z,t]=lsim(observer,[y u]',t); %xe=chat*z'+dhat*y; z=z'; for i=:length(t); xe(i,:)=chat*z(:,i)+dhat*y(i); end; subplot(2,2,);plot(t,xe(:,),'r',t,x(:,),'b','linewidth',2); line([0 max(t)],[0 0],'LineWidth',,'Color','k','LineStyle','-') %Eje real legend('xe(t)','x(t)'); xlabel('tiempo [seg]'); ylabel('y(t)=x(t)=xe(t)'); grid on subplot(2,2,2);plot(t,xe(:,2),'r',t,x(:,2),'b','linewidth',2); axis([0 t(end)... min(min(x(:,2)),min(xe(:,2))) max(max(x(:,2)),max(xe(:,2)))]) line([0 max(t)],[0 0],'LineWidth',,'Color','k','LineStyle','-') %Eje real legend('x2e(t)','x2(t)'); xlabel('tiempo [seg]'); ylabel('x2(t), x2e(t)'); grid on subplot(2,2,3);plot(t,xe(:,3),'r',t,x(:,3),'b','linewidth',2); axis([0 t(end)... min(min(x(:,3)),min(xe(:,3))) max(max(x(:,3)),max(xe(:,3)))]) line([0 max(t)],[0 0],'LineWidth',,'Color','k','LineStyle','-') %Eje real legend('x3e(t)','x3(t)'); xlabel('tiempo [seg]'); ylabel('x3(t), x3e(t)'); grid on subplot(2,2,4);plot(t,xe(:,4),'r',t,x(:,4),'b','linewidth',2); axis([0 t(end)... min(min(x(:,4)),min(xe(:,4))) max(max(x(:,4)),max(xe(:,4)))]) line([0 max(t)],[0 0],'LineWidth',,'Color','k','LineStyle','-') %Eje real legend('x4e(t)','x4(t)'); xlabel('tiempo [seg]'); ylabel('x4(t), x4e(t)'); grid on 9
10 0
11 Realimentación de los Estados Estimados
12 Realimentación de los estados estimados Ahora queremos utilizar el observador de orden reducido que hemos obtenido en el controlador (realimentación de los estados estimados). Para regulación como muestra la figura. 2
13 o para seguimiento. 3
14 Si analizamos la script anterior vemos que primero simulamos la planta y después el observador introduciendo la misma u(t) y la salida y(t) de la simulación de la planta. Ahora con el sistema a lazo cerrado esa estrategia de simulación no la podemos emplear. En el observador de orden completo no tuvimos este inconveniente ya que disponíamos del modelo completo a lazo cerrado. xt () A BK x() t BF rt () xt ˆ () LC A LC BK xˆ () t BF A cl B cl y( t) C 0 C cl xt () xt ˆ( ) No tenemos en el observador de orden reducido un modelo a lazo cerrado similar al de orden completo. 4
15 Existen varias alternativas para realizar la simulación a lazo cerrado. ) Utilizar el comando connect para construir en Matlab el modelo a lazo cerrado. 2) La solución más sencilla es construir el modelo a lazo cerrado en Simulink. y realizar la simulación desde Matlab con el comando sim en vez del lsim. 5
16 3) Obtener la función de transferencia del observador de orden reducidocontrolador Goc() s como hicimos en el observador de orden completo y analizar la respuesta del sistema con la salida. En este caso perdemos la información de la evolución de los estados de la planta y de los del observador (estimaciones) pero se asume que si la salida es la adecuada todo va bien (recordemos que los estados son un medio para construir un controlador que nos de la salida deseada). 6
17 Función de Transferencia Observador de orden reducido-controlador La función de transferencia conjunta del observador de orden reducidocontrolador Goc() s es: (ver deducción en Ogata) Us () C adj( si A) B si A D Goc( s) C ( si A) B D Ys () si A 7
18 Donde : Aˆ A LA bb Bˆ AL ˆ A LA Fˆ B LB b ba a ab aa K K K, K k, K k k k, a b a b 2 3 n A Aˆ FK ˆ b B Bˆ Fˆ( K K L ) C K b D ( K K L) % Cálculo de la matriz de ganancia de realimentación del estado K A = [0 0;0 0 ; ]; B = [0;0;-80]; C = [ 0 0]; D=0; lambdas_cont = [-+2*i --2*i -5]; K = acker(a,b,lambdas_cont); % K= % Cálculo de la matriz de ganancia del observador L Aaa=0; Aab=[ 0]; Aba=[0;0]; Abb=[0 ;-24-0];Ba=0; Bb=[0;-80]; lambdas_obs= [-0-0]; L = acker(abb',aab',lambdas_obs)'; % L=[0-24]' % Determinación de la función de transferencia del controlador-observador a a b b 8
19 Ka =.25; Kb = [ ]; Ahat = Abb-L*Aab; Bhat = Ahat*L+Aba-L*Aaa; Fhat = Bb-L*Ba; Atilde = Ahat-Fhat*Kb; Btilde = Bhat-Fhat*(Ka+Kb*L); Ctilde = -Kb; Dtilde = -(Ka+Kb*L); [num,den] = ss2tf(atilde, Btilde, -Ctilde, -Dtilde); Gc=tf(num,den) % La función de transferencia del observador-controlador es: % 9. s^ s + 25 % G(s) = % s^2 + 7 s - 30 % La función de transferencia es propia (no estrictamente propia), esto significa que el % orden del numerador es igual al del denominador (número de ceros igual al número de polos). %Llegamos a la misma función de transferencia con la function diofantina Acl=poly([lambdas_cont lambdas_obs]); [b,a]=ss2tf(a,b,c,d); [R,S] = diofantina(a,b,acl); Gc_diofantina=zpk(tf(S,R)) % Da la misma función de transferencia: % 9. s^ s + 25 % G_diofantina(s) = % s^2 + 7 s
20 Diseño alternativo de observadores de orden reducido Paso ) Se transforma el modelo de estados original ( A, B, C, D ) a la forma Canónica Controlable b o beta ( A, B, C, D ). En estas coordenadas la salida queda como el primer estado. Paso 2) a. Se elige una matriz F cualquiera que sea Hurwitz de ( n ) ( n ) y que no tenga autovalores en común con los de A (o los de A ya que son los mismos). Una opción es a partir de los valores propios deseados del observador, 2,..., n- construir la matriz diagonal F diag([ ]) n- 0 0 n- b. Se elige un vector L cualquiera de ( n ) tal que el par ( FL, ) sea controlable. Una opción es elegir las componentes de L aleatorios L=rand(n-,), y verificar que ctrb(f,l) sea de rango completa. 20
21 Paso 3) Se calcula T, la solución única no singular, de la ecuación de Sylvester: TA FT LC Notar que T es una matriz rectangular de ( n ) n. Paso 4) Se construye el siguiente sistema de orden n que genera z(t). z( t) Fz( t) TBu( t) Ly( t) Fz( t) TB u() t L y() t Paso 5) Se realiza la siguiente transformación lineal para obtener xt ˆ() xt ˆ( ) C y() t T z() t 2
22 Observar que y( t) xˆ ( t ) C y( t) C yt ( ) y( t) Cxˆ( t) xˆ ( t) xˆ( t) xˆ( t) T z( t) T z( t) z( t) Txˆ ( t) 22
23 clear, clc, close all planta_original=ss(zpk([-2+2i -2-2i],[ i -.5-2i -3],2.344)); [A,B,C,D]=ssdata(planta_original); % OBSERVADOR DE ORDEN REDUCIDO DE CHEN % ) Se pasa la planta a la FCCb. La matriz de transformación es la matriz de observabilidad del sistema original. [Acc,Bcc,Ccc,Dcc]=ss2ss(A,B,C,D,obsv(A,C)); % Se describe la planta en las nuevas coordenadas planta=ss(acc,bcc,ccc,dcc); % Se simula la planta t=[0:0.0:5];u=ones(length(t),); [y,t,x]=lsim(planta,u,t,[ ]); % 2) Se especifican los autovalores deseados del observador y se eligen F y L lambdas_obs=[ ]; F=diag(lambdas_obs);L=rand(length(Acc)-,); % 3)Se calcula T resolviendo la ecuación de Sylvester -F*T+T*Acc=L*Ccc T = sylvester(-f,acc,l*ccc); % 4) Se construye el siguiente sistema de orden n- que genera una estima de x(t). Aob=F; Bob=[T*Bcc L]; Cob=eye(length(Aob));Dob=zeros(length(Aob),2); observer=ss(aob,bob,cob,dob); [z,t]=lsim(observer,[u y]',t); % 5) Se realiza la transformación final para obtener el estimador xe(t) P=inv([Ccc;T]); zz=[y z]'; for i=:length(t); xe(:,i)=p*zz(:,i); end; subplot(2,2,);plot(t,zeros(,length(t)),'k',t,xe(,:),'r',t,x(:,),'b','linewidth',2); title('y(t)=x(t)=xe(t)'); xlabel('tiempo [seg]'); ylabel('y(t)=x(t)=xe(t)') subplot(2,2,2);plot(t,zeros(,length(t)),t,xe(2,:),'r',t,x(:,2),'b','linewidth',2); axis([0 t(end) -5 5]) title('x2(t)(azul), x2e(t)(rojo)'); xlabel('tiempo [seg]'); ylabel('x2(t), x2e(t)') subplot(2,2,3);plot(t,zeros(,length(t)),t,xe(3,:),'r',t,x(:,3),'b','linewidth',2); axis([0 t(end) -20 5]) title('x3(t)(azul), x3e(t)(rojo)'); xlabel('tiempo [seg]'); ylabel('x3(t), x3e(t)') subplot(2,2,4);plot(t,zeros(,length(t)),t,xe(4,:),'r',t,x(:,4),'b','linewidth',2); axis([0 t(end) -0 40]) title('x4(t)(azul), x4e(t)(rojo)'); xlabel('tiempo [seg]'); ylabel('x4(t), x4e(t)') 23
24 24
25 Función de Transferencia Observador de orden reducido-controlador Para este caso la fórmula cerrada del observador de orden reducido-controlador es muy complicada: Us () C 0 C Goc( s) K K Ys () T ( si F) TB T ( si F) L clear, clc, close all A = [0 0;0 0 ; ]; B = [0;0;-80]; C = [ 0 0]; D=0; [Acc,Bcc,Ccc,Dcc]=ss2ss(A,B,C,D,obsv(A,C)); lambdas_cont = [-+2*i --2*i -5]; lambdas_obs=[-0-2]; K = acker(acc,bcc,lambdas_cont); % OBSERVADOR DE ORDEN REDUCIDO CHEN F = diag(lambdas_obs); L = rand(length(a)-,); T = sylvester(-f,acc,l*ccc); syms s G_Chen=inv(+K*inv([Ccc;T])*[0 ; inv(eye(length(a)-)*s-f)*t*bcc])*k*... inv([ccc;t])*[;inv(eye(length(a)-)*s-f)*l]; G_Chen=collect(G_Chen,s); [num,den]=numden(g_chen); cnum=coeffs(num); cnum=flip(cnum); cden=coeffs(den);cden=flip(cden); cnum=double(cnum/cden()); cden=double(cden/cden()); G_Chen=zpk(tf(cnum,cden)) %.6 (s+5.593) (s+2.32) % G_Chen = % (s+20.96) (s-.956) 25
26 Es más fácil utilizar la diofantina clear, clc, close all A = [0 0;0 0 ; ]; B = [0;0;-80]; C = [ 0 0]; D=0; lambdas_cont = [-+2*i --2*i -5]; lambdas_obs=[-0-2]; Acl=poly([lambdas_cont lambdas_obs]); [b,a]=ss2tf(a,b,c,d); [R,S] = diofantina(a,b,acl); Gc_Chen_diofantina=zpk(tf(S,R)) % Da la misma función de transferencia: %.6 (s+5.593) (s+2.32) % G_Chen_diofantina = % (s+20.96) (s-.956) 26
Estimación de Estados Observadores. Fernando di Sciascio (2016)
") Estimación de Estados Observadores Fernando di Sciascio (2016) 1 Estimación de Estados La realimentación de los estados requiere poder medirlos pero normalmente no tenemos acceso directo a todos los estados.
Estimación de Estados Observadores Fernando di Sciascio (2016) 1 Estimación de Estados La realimentación de los estados requiere poder medirlos pero normalmente no tenemos acceso directo a todos los estados.
CONTROL POR REALIMENTACIÓN DE ESTADOS
 CONTROL POR REALIMENTACIÓN DE ESTADOS Fernando di Sciascio (2016) Control por Realimentación de Estados ì ï xt () = Axt () + But () í ï yt () = Cxt () ïî El par (A,B) es controlable. Y() s -1 Gol() s =
CONTROL POR REALIMENTACIÓN DE ESTADOS Fernando di Sciascio (2016) Control por Realimentación de Estados ì ï xt () = Axt () + But () í ï yt () = Cxt () ïî El par (A,B) es controlable. Y() s -1 Gol() s =
Teoría de Control Moderna
 1! Modelos en Variables de Estado Juan Antonio Hernández Tamames, Susana Borromeo Curso 2014-2015 Teoría de Control Moderna 2! Teoría de control clásica basada en la relación entrada-salida o función de
1! Modelos en Variables de Estado Juan Antonio Hernández Tamames, Susana Borromeo Curso 2014-2015 Teoría de Control Moderna 2! Teoría de control clásica basada en la relación entrada-salida o función de
Control Moderno. Ene.-Jun Diseño de controlador con referencia a la entrada, servosistemas. Dr. Rodolfo Salinas. mayo 2007
 UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN Facultad de Ingeniería Mecánica y Eléctrica Control Moderno Ene.-Jun. 2007 Diseño de controlador con referencia a la entrada, servosistemas Dr. Rodolfo Salinas mayo 2007
UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN Facultad de Ingeniería Mecánica y Eléctrica Control Moderno Ene.-Jun. 2007 Diseño de controlador con referencia a la entrada, servosistemas Dr. Rodolfo Salinas mayo 2007
VALORES PROPIOS (AUTOVALORES) VECTORES PROPIOS (AUTOVECTORES)
 VECTORES PROPIOS (AUTOVECTORES)") VALORES PROPIOS (AUTOVALORES) Y VECTORES PROPIOS (AUTOVECTORES) Autovalores y Autovectores Los vectores propios o autovectores de una matriz A son todos los vectores x i 0, a los que la transformación
VALORES PROPIOS (AUTOVALORES) Y VECTORES PROPIOS (AUTOVECTORES) Autovalores y Autovectores Los vectores propios o autovectores de una matriz A son todos los vectores x i 0, a los que la transformación
Control Automático. Control con observadores de estado
 Control Automático Control con observadores de estado Contenido Observabilidad Observadores de estado sin entrada r Cálculo de la ganancia K del observador usando Ackermann Compensadores con entrada de
Control Automático Control con observadores de estado Contenido Observabilidad Observadores de estado sin entrada r Cálculo de la ganancia K del observador usando Ackermann Compensadores con entrada de
Parte I. Diseño utilizando Variables de Estado
 Parte I. Diseño utilizando Variables de Estado El control de un proceso representado a través de variables de estado nos proporciona la ventaja de que se tendrán a todas las variables del proceso cumpliendo
Parte I. Diseño utilizando Variables de Estado El control de un proceso representado a través de variables de estado nos proporciona la ventaja de que se tendrán a todas las variables del proceso cumpliendo
Control por realimentación del estado
 Control por realimentación del estado Introducción Realimentación del estado Control de sistemas monovariables Control de sistemas multivariables U.P.M.-DISAM P. Campoy Electrónica y Regulación Introducción:
Control por realimentación del estado Introducción Realimentación del estado Control de sistemas monovariables Control de sistemas multivariables U.P.M.-DISAM P. Campoy Electrónica y Regulación Introducción:
VALORES PROPIOS (AUTOVALORES) VECTORES PROPIOS (AUTOVECTORES) Fernando di Sciascio (2017)
 VECTORES PROPIOS (AUTOVECTORES) Fernando di Sciascio (2017)") VALORES PROPIOS (AUTOVALORES) Y VECTORES PROPIOS (AUTOVECTORES) Fernando di Sciascio (2017) Autovalores y Autovectores Los vectores propios o autovectores de una matriz A son todos los vectores x i ¹0,
VALORES PROPIOS (AUTOVALORES) Y VECTORES PROPIOS (AUTOVECTORES) Fernando di Sciascio (2017) Autovalores y Autovectores Los vectores propios o autovectores de una matriz A son todos los vectores x i ¹0,
DIAGRAMAS DE ESTADO. Fernando di Sciascio (2016)
") DIAGRAMAS DE ESTADO Fernando di Sciascio (2016) Diagramas de Estado Los Diagramas de Estado son una extensión de los diagramas de flujo señal y permiten describir gráficamente ecuaciones diferenciales
DIAGRAMAS DE ESTADO Fernando di Sciascio (2016) Diagramas de Estado Los Diagramas de Estado son una extensión de los diagramas de flujo señal y permiten describir gráficamente ecuaciones diferenciales
DIAGRAMAS DE ESTADO. Fernando di Sciascio (2017)
") DIAGRAMAS DE ESTADO Fernando di Sciascio (2017) Diagramas de Estado Los Diagramas de Estado son una extensión de los diagramas de flujo señal y permiten describir gráficamente ecuaciones diferenciales
DIAGRAMAS DE ESTADO Fernando di Sciascio (2017) Diagramas de Estado Los Diagramas de Estado son una extensión de los diagramas de flujo señal y permiten describir gráficamente ecuaciones diferenciales
Controlabilidad, Observabilidad y Detactabilidad
 Controlabilidad, Observabilidad y Detactabilidad Controlabilidad: Definición básica Considere el siguiente sistema lineal e invariante en el tiempo Controlabilidad: diremos que el par (A,B) es controlable
Controlabilidad, Observabilidad y Detactabilidad Controlabilidad: Definición básica Considere el siguiente sistema lineal e invariante en el tiempo Controlabilidad: diremos que el par (A,B) es controlable
Sistema neumático de control de nivel
 ULA. FACULTAD DE INGENIERIA. ESCUELA DE MECANICA. TEORIA DE CONTROL. EJERCICIOS FINAL Ejercicio 1. Primera parte: Modelado y de un tanque de agua, con su sistema de medición de nivel. La figura muestra
ULA. FACULTAD DE INGENIERIA. ESCUELA DE MECANICA. TEORIA DE CONTROL. EJERCICIOS FINAL Ejercicio 1. Primera parte: Modelado y de un tanque de agua, con su sistema de medición de nivel. La figura muestra
Realimentación de Estado DSEÑO DE SSTEMAS DE Los polos del sistema en lazo cerrado se reubican mediante una matriz de ganancias K (dimensiones rxn) qu
 qu") DSEÑO DE SSTEMAS DE Diseño en el Espacio de Estados Objetivo: Cambiar la situación de los "n" polos del sistema para cambiar su dinámica en bucle cerrado (sistema más rápido, con más o menos sobreoscilación,
DSEÑO DE SSTEMAS DE Diseño en el Espacio de Estados Objetivo: Cambiar la situación de los "n" polos del sistema para cambiar su dinámica en bucle cerrado (sistema más rápido, con más o menos sobreoscilación,
TÉCNICA DEL LUGAR GEOMÉTRICO DE LAS RAÍCES
 DEPARTAMENTO DE ELECTRÓNICA Y AUTOMÁTICA CARRERAS: BIOINGENIERÍA E INGENIERÍA ELECTRÓNICA ÁREA: CONTROL ASIGNATURA: CONTROL II GUIÁ DE APRENDIZAJE Y AUTOEVALUACIÓN Nº TÉCNICA DEL LUGAR GEOMÉTRICO DE LAS
DEPARTAMENTO DE ELECTRÓNICA Y AUTOMÁTICA CARRERAS: BIOINGENIERÍA E INGENIERÍA ELECTRÓNICA ÁREA: CONTROL ASIGNATURA: CONTROL II GUIÁ DE APRENDIZAJE Y AUTOEVALUACIÓN Nº TÉCNICA DEL LUGAR GEOMÉTRICO DE LAS
CASOS ESPECIALES DEL LUGAR GEOMÉTRICO DE LAS RAÍCES. Fernando di Sciascio (2017)
") CASOS ESPECIAES DE UGAR GEOMÉTRICO DE AS RAÍCES Fernando di Sciascio (2017) Casos Especiales del ugar Geométrico de las Raíces Recordemos que el problema general del ugar de las Raíces puede ser formulado
CASOS ESPECIAES DE UGAR GEOMÉTRICO DE AS RAÍCES Fernando di Sciascio (2017) Casos Especiales del ugar Geométrico de las Raíces Recordemos que el problema general del ugar de las Raíces puede ser formulado
Controlabilidad Observabilidad Principio de Dualidad Descomposición Canónica o de de Kalman Realizaciones Balanceadas. Fernando di Sciascio (2016)
") Controlabilidad Observabilidad Principio de Dualidad Descomposición Canónica o de de Kalman Realizaciones Balanceadas Fernando di Sciascio (2016) CONTROLABILIDAD Fernando di Sciascio (2016) Controlabilidad
Controlabilidad Observabilidad Principio de Dualidad Descomposición Canónica o de de Kalman Realizaciones Balanceadas Fernando di Sciascio (2016) CONTROLABILIDAD Fernando di Sciascio (2016) Controlabilidad
11 REPRESENTACIÓN EN EL ESPACIO DE ESTADO. 1.3 SOLUCIÓN DE ECUACIONES DE ESTADO EN TIEMPO
 Control Avanzado. Luis Edo García Jaimes 1 TABLA DE CONTENIDO 1. ANÁLISIS DE SISTEMAS DE CONTROL EN EL ESPACIO DE 5 ESTADO 1.1 FORMAS CANÓNICAS PARA ECUACIONES EN EL ESPACIO DE ESTADO EN TIEMPO DISCRETO
Control Avanzado. Luis Edo García Jaimes 1 TABLA DE CONTENIDO 1. ANÁLISIS DE SISTEMAS DE CONTROL EN EL ESPACIO DE 5 ESTADO 1.1 FORMAS CANÓNICAS PARA ECUACIONES EN EL ESPACIO DE ESTADO EN TIEMPO DISCRETO
Observadores del estado
 Observadores del estado Introducción Definición Dinámica del sistema con observador monovariables multivariables U.P.M.-DISAM P. Campoy Control en el espacio de estado 1 Introducción Concepto: el observador
Observadores del estado Introducción Definición Dinámica del sistema con observador monovariables multivariables U.P.M.-DISAM P. Campoy Control en el espacio de estado 1 Introducción Concepto: el observador
Controlabilidad completa del estado para sistemas en tiempo continuo
 Capítulo 11: CONTROLABILIDAD Y OBSERVABILIDAD Se dice que un sistema es controlable en el instante t0 si es posible llevarlo de cualquier estado inicial x(t0) a cualquier otro estado, empleando un vector
Capítulo 11: CONTROLABILIDAD Y OBSERVABILIDAD Se dice que un sistema es controlable en el instante t0 si es posible llevarlo de cualquier estado inicial x(t0) a cualquier otro estado, empleando un vector
Control Analógico II M.I. Isidro Ignacio Lázaro Castillo
 UNIDAD I Método del lugar de las raíces Control Analógico II M.I. Isidro Ignacio Lázaro Castillo Antecedentes históricos En 1948 Walter R. Evans introdujo este método que es gráfico y elegante para la
UNIDAD I Método del lugar de las raíces Control Analógico II M.I. Isidro Ignacio Lázaro Castillo Antecedentes históricos En 1948 Walter R. Evans introdujo este método que es gráfico y elegante para la
Control Moderno. Ene.-Jun Observabilidad y Observadores de Estado. Dr. Rodolfo Salinas. mayo 2007
 UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN Facultad de Ingeniería Mecánica y Eléctrica Control Moderno Ene.-Jun. 2007 Observabilidad y Observadores de Estado Dr. Rodolfo Salinas mayo 2007 Control Moderno N1 mayo
UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN Facultad de Ingeniería Mecánica y Eléctrica Control Moderno Ene.-Jun. 2007 Observabilidad y Observadores de Estado Dr. Rodolfo Salinas mayo 2007 Control Moderno N1 mayo
SISTEMAS DE CONTROL AVANZADO
 SISTEMAS DE CONTROL AVANZADO LUIS EDO GARCÍA JAIMES POLITÉCNICO COLOMBIANO J.I.C PRIMERA PARTE ANÁLISIS DE SISTEMAS DE CONTROL EN EL ESPACIO DE ESTADO Este método tiene como objetivo la descripción de
SISTEMAS DE CONTROL AVANZADO LUIS EDO GARCÍA JAIMES POLITÉCNICO COLOMBIANO J.I.C PRIMERA PARTE ANÁLISIS DE SISTEMAS DE CONTROL EN EL ESPACIO DE ESTADO Este método tiene como objetivo la descripción de
Control Moderno: Paradigmas y Desafíos
 Control Moderno: Paradigmas y Desafíos Elizabeth Villota Cerna Curso: Ingeniería de Control (MT221) Facultad de Ingeniería Mecánica 1 Paradigma del control por realimentación entradas exógenas salidas
Control Moderno: Paradigmas y Desafíos Elizabeth Villota Cerna Curso: Ingeniería de Control (MT221) Facultad de Ingeniería Mecánica 1 Paradigma del control por realimentación entradas exógenas salidas
6.- Lugar Geométrico de la Raíces en Sistemas Discretos
 6.- Lugar Geométrico de la Raíces en Sistemas Discretos Introducción Como vimos, el diseño de un controlador consiste en colocar los polos y ceros de la función de transferencia del sistema en lazo cerrado,
6.- Lugar Geométrico de la Raíces en Sistemas Discretos Introducción Como vimos, el diseño de un controlador consiste en colocar los polos y ceros de la función de transferencia del sistema en lazo cerrado,
Observadores de estados
 Universidad Nacional de La Plata Facultad de Ingeniería Departamento de Electrotecnia Cátedra de Control Moderno Observadores de estados Ricardo Julián Mantz Año 23 1. Introducción Hemos visto que para
Universidad Nacional de La Plata Facultad de Ingeniería Departamento de Electrotecnia Cátedra de Control Moderno Observadores de estados Ricardo Julián Mantz Año 23 1. Introducción Hemos visto que para
TEORÍA DE CONTROL. Realimentación de Variables de Estado Reasignación de Autovalores
 EORÍA DE CONROL Realimentación de Variables de Estado Reasignación de Autovalores L e y de C o n t r o l El estado de un sistema tiene incorporado toda la información necesaria para determinar la acción
EORÍA DE CONROL Realimentación de Variables de Estado Reasignación de Autovalores L e y de C o n t r o l El estado de un sistema tiene incorporado toda la información necesaria para determinar la acción
CONTROL DE VELOCIDAD DE UN MOTOR DC, USANDO FILTROS DE KALMAN EN TIEMPO CONTINUO
 CONTROL DE VELOCIDAD DE UN MOTOR DC, USANDO FILTROS DE KALMAN EN TIEMPO CONTINUO Julio C Mansilla Hernández (1); Julio N. García Silverio (2); Francisco J. Arteaga (3) (1) ELEOCCIDENTE, Dpto. de Planificación
CONTROL DE VELOCIDAD DE UN MOTOR DC, USANDO FILTROS DE KALMAN EN TIEMPO CONTINUO Julio C Mansilla Hernández (1); Julio N. García Silverio (2); Francisco J. Arteaga (3) (1) ELEOCCIDENTE, Dpto. de Planificación
Diseño en espacio de estados
 Diseño en espacio de estados Dr. Guillermo Valencia-Palomo gvalencia@ith.mx Instituto Tecnológico de Hermosillo. División de estudios de posgrado e investigación. Junio, 2011. 1 Introducción Contenido
Diseño en espacio de estados Dr. Guillermo Valencia-Palomo gvalencia@ith.mx Instituto Tecnológico de Hermosillo. División de estudios de posgrado e investigación. Junio, 2011. 1 Introducción Contenido
Los Diagramas de Estado son una extensión de los diagramas de flujo señal y permiten describir gráficamente ecuaciones diferenciales y de estado.
 DIAGRAMAS DE ESTADO Diagramas de Estado Los Diagramas de Estado son una extensión de los diagramas de flujo señal y permiten describir gráficamente ecuaciones diferenciales y de estado. El diagrama de
DIAGRAMAS DE ESTADO Diagramas de Estado Los Diagramas de Estado son una extensión de los diagramas de flujo señal y permiten describir gráficamente ecuaciones diferenciales y de estado. El diagrama de
TEORÍA DE CONTROL. Estimador asintótico de estados Caso SISO
 TEORÍA DE CONTROL Estimador asintótico de estados Caso SISO Observadores o Estimadores de Estado El concepto de observadores puede atribuirse a David G. Luenberger, que lo desarrolló como resultado de
TEORÍA DE CONTROL Estimador asintótico de estados Caso SISO Observadores o Estimadores de Estado El concepto de observadores puede atribuirse a David G. Luenberger, que lo desarrolló como resultado de
6. Diseño Básico de controladores SISO
 6. Diseño Básico de controladores SISO Parte 1 Panorama: Enfoque polinomial Ajuste de PI y PID mediante asignación de polos El predictor de Smith CAUT1 Clase 9 1 Introducción En el capítulo anterior examinamos
6. Diseño Básico de controladores SISO Parte 1 Panorama: Enfoque polinomial Ajuste de PI y PID mediante asignación de polos El predictor de Smith CAUT1 Clase 9 1 Introducción En el capítulo anterior examinamos
Sistemas de control con realimentación de la salida
 Capítulo 7 Sistemas de control con realimentación de la salida 7.1. Introducción En el capítulo 5 se supuso que estaba disponible el vector de estado completamente. Relajando esta suposición y estudiando
Capítulo 7 Sistemas de control con realimentación de la salida 7.1. Introducción En el capítulo 5 se supuso que estaba disponible el vector de estado completamente. Relajando esta suposición y estudiando
HORARIO DE CLASES SEGUNDO SEMESTRE
 HORARIO DE CLASES LUNES MIERCOLES 17 a 18:15 hs 17 a 18:15 hs Ln 14/08/17: CRONOGRAMA DE CLASES y PARCIALES CONTROL I -AÑO 2017- SEGUNDO SEMESTRE Introducción a los sistemas de Control. Definiciones de
HORARIO DE CLASES LUNES MIERCOLES 17 a 18:15 hs 17 a 18:15 hs Ln 14/08/17: CRONOGRAMA DE CLASES y PARCIALES CONTROL I -AÑO 2017- SEGUNDO SEMESTRE Introducción a los sistemas de Control. Definiciones de
Control en el Espacio de Estado 3. Controlabilidad. por Pascual Campoy Universidad Politécnica Madrid
 Control en el Espacio de Estado 3. Controlabilidad por Pascual Campoy pascual.campoy@upm.es Universidad Politécnica Madrid U.P.M.-DISAM P. Campoy Control en el Espacio de Estado 1 Controlabilidad Definiciones
Control en el Espacio de Estado 3. Controlabilidad por Pascual Campoy pascual.campoy@upm.es Universidad Politécnica Madrid U.P.M.-DISAM P. Campoy Control en el Espacio de Estado 1 Controlabilidad Definiciones
Práctica 4 CONVERSIÓN ENTRE LAS DIFERENTES REPRESENTACIONES DE LOS MODELOS LABORATORIO DE MODELADO DE SISTEMAS
 Práctica 4 CONVERSIÓN ENTRE LAS DIFERENTES REPRESENTACIONES DE LOS MODELOS LABORATORIO DE MODELADO DE SISTEMAS 13 de marzo de 017 Autor: Rubén Velázquez Cuevas Práctica 4 CONVERSIÓN ENTRE LAS DIFERENTES
Práctica 4 CONVERSIÓN ENTRE LAS DIFERENTES REPRESENTACIONES DE LOS MODELOS LABORATORIO DE MODELADO DE SISTEMAS 13 de marzo de 017 Autor: Rubén Velázquez Cuevas Práctica 4 CONVERSIÓN ENTRE LAS DIFERENTES
CAPITULO 3 3. METÓDO DE UBICACIÓN DE POLOS PARA EL ANÁLISIS EN EL DISEÑO DEL SISTEMA DEL TIPO REGULADOR.
 CPITULO 3 3. METÓDO DE UBICCIÓN DE POLOS PR EL NÁLISIS EN EL DISEÑO DEL SISTEM DEL TIPO REGULDOR. El método de Espacio de Estados, al igual que los métodos por medios de la Función de Transferencia o relación
CPITULO 3 3. METÓDO DE UBICCIÓN DE POLOS PR EL NÁLISIS EN EL DISEÑO DEL SISTEM DEL TIPO REGULDOR. El método de Espacio de Estados, al igual que los métodos por medios de la Función de Transferencia o relación
Modelos en el Espacio de Estado
 José Luis Rodríguez, PhD, Octubre del 00 Modelos en el Espacio de Estado Introducción: La tendencia moderna en la ingeniería de sistemas es hacia una complejidad cada vez mayor, debido principalmente a
José Luis Rodríguez, PhD, Octubre del 00 Modelos en el Espacio de Estado Introducción: La tendencia moderna en la ingeniería de sistemas es hacia una complejidad cada vez mayor, debido principalmente a
Descomposiciones Canónicas
 Observabilidad p. 1/12 Descomposiciones Canónicas Las descomposiciones canónicas de las ecuaciones de estado permiten establecer la relación entre Controlabilidad, Observabilidad, y una matriz de transferencia
Observabilidad p. 1/12 Descomposiciones Canónicas Las descomposiciones canónicas de las ecuaciones de estado permiten establecer la relación entre Controlabilidad, Observabilidad, y una matriz de transferencia
Clase 8 Matrices Álgebra Lineal
 Clase 8 Matrices Álgebra Lineal Código Escuela de Matemáticas - Facultad de Ciencias Universidad Nacional de Colombia Matrices Definición Una matriz es un arreglo rectangular de números denominados entradas
Clase 8 Matrices Álgebra Lineal Código Escuela de Matemáticas - Facultad de Ciencias Universidad Nacional de Colombia Matrices Definición Una matriz es un arreglo rectangular de números denominados entradas
1.5. Seguimiento de Referencias Acción Integral Controlador con Dos Grados de Libertad 35
 . Diseño Basado en la Ubicación de Polos. Diseño Basado en la Ubicación de Polos.. Introducción.. Realimentación del Estado... Caso General 3... Aspectos Prácticos... Control de Tiempo Finito..3. Perturbación
. Diseño Basado en la Ubicación de Polos. Diseño Basado en la Ubicación de Polos.. Introducción.. Realimentación del Estado... Caso General 3... Aspectos Prácticos... Control de Tiempo Finito..3. Perturbación
- Facultad de Ingeniería-
 Universidad Nacional Autónoma de México - Facultad de Ingeniería- Análisis de Sistemas y Señales Trabajo 3: respuestas y transformaciones de algunas funciones de transferencia Profesora: M. I. Elizabeth
Universidad Nacional Autónoma de México - Facultad de Ingeniería- Análisis de Sistemas y Señales Trabajo 3: respuestas y transformaciones de algunas funciones de transferencia Profesora: M. I. Elizabeth
CORRECCIÓN PRUEBA 2ª EVALUACIÓN
 CORRECCIÓN PRUEBA ª EVALUACIÓN OPCIÓN A EJERCICIO nº Sea la matriz 0 0 A a 0 b a) Cuándo el determinante de A es el seno de algún número real? b) Calcula la inversa de A cuando exista. c) Determina todos
CORRECCIÓN PRUEBA ª EVALUACIÓN OPCIÓN A EJERCICIO nº Sea la matriz 0 0 A a 0 b a) Cuándo el determinante de A es el seno de algún número real? b) Calcula la inversa de A cuando exista. c) Determina todos
1. Análisis de Sistemas Discretos
 . Análisis de Sistemas Discretos. Análisis de Sistemas Discretos.. Introducción.. Estabilidad... Estabilidad de Sistemas Lineales 3... Estabilidad de Sistemas con Entrada y Salida Acotadas(BIBO) 4..3.
. Análisis de Sistemas Discretos. Análisis de Sistemas Discretos.. Introducción.. Estabilidad... Estabilidad de Sistemas Lineales 3... Estabilidad de Sistemas con Entrada y Salida Acotadas(BIBO) 4..3.
Diseño en espacio de estados
 Diseño en espacio de estados Dr. Guillermo Valencia-Palomo gvalencia@ith.mx Instituto Tecnológico de Hermosillo. División de estudios de posgrado e investigación. Octubre, 2011. 1 Introducción Contenido
Diseño en espacio de estados Dr. Guillermo Valencia-Palomo gvalencia@ith.mx Instituto Tecnológico de Hermosillo. División de estudios de posgrado e investigación. Octubre, 2011. 1 Introducción Contenido
Espacios euclídeos. Transformaciones ortogonales
 Espacios euclídeos. Transformaciones ortogonales Álgebra con MATLAB: Práctica 3 Curso 2006-2007 Una ortogonalización Empezaremos esta práctica utilizando MATLAB para resolver el siguiente problema: En
Espacios euclídeos. Transformaciones ortogonales Álgebra con MATLAB: Práctica 3 Curso 2006-2007 Una ortogonalización Empezaremos esta práctica utilizando MATLAB para resolver el siguiente problema: En
ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL
 ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL MODELADO, SIMULACIÓN Y CONTROL DE UN SISTEMA DINÁMICO MEDIANTE EL USO DE COMPONENETES ANÁLOGOS Autor Roberth Tinoco Director Ing. Eduardo Orces Contenidos. Introducción.
ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL MODELADO, SIMULACIÓN Y CONTROL DE UN SISTEMA DINÁMICO MEDIANTE EL USO DE COMPONENETES ANÁLOGOS Autor Roberth Tinoco Director Ing. Eduardo Orces Contenidos. Introducción.
Estimación de estados
 Observadores p. 1/37 Estimación de estados La realimentación de estados requiere medir los estados, pero normalmente, no se tiene acceso a todos los estados. Entonces cómo implementar la realimentación
Observadores p. 1/37 Estimación de estados La realimentación de estados requiere medir los estados, pero normalmente, no se tiene acceso a todos los estados. Entonces cómo implementar la realimentación
Sistemas de Control lineal óptimo con realimentación de estado
 Capítulo 5 Sistemas de Control lineal óptimo con realimentación de estado La principal restricción de este sistema de control es suponer que se puede medir en todo instante de tiempo el estado completo
Capítulo 5 Sistemas de Control lineal óptimo con realimentación de estado La principal restricción de este sistema de control es suponer que se puede medir en todo instante de tiempo el estado completo
Diseño de Observadores Lineales Dedicados aplicados al problema del diagnóstico de fallas
 Diseño de Observadores Lineales Dedicados aplicados al problema del diagnóstico de fallas Juan Anzurez, Celso Cortés j.anzurez@ieee.org, janzurez@umich.mx, División de Estudios de Posgrado de la Facultad
Diseño de Observadores Lineales Dedicados aplicados al problema del diagnóstico de fallas Juan Anzurez, Celso Cortés j.anzurez@ieee.org, janzurez@umich.mx, División de Estudios de Posgrado de la Facultad
SOLUCIONARIO PROBLEMAS REALIMENTACION DE ESTADOS
 SOLUCIONARIO PROBLEMAS REALIMENTACION DE ESTADOS P1: Sea un servo descrito por la función de transferencia de estados digital. Deseamos diseñar un control por realimentación a) Escriba las ecuaciones de
SOLUCIONARIO PROBLEMAS REALIMENTACION DE ESTADOS P1: Sea un servo descrito por la función de transferencia de estados digital. Deseamos diseñar un control por realimentación a) Escriba las ecuaciones de
ELEMENTOS DE ALGEBRA LINEAL
 ELEMENTOS DE ALGEBRA LINEAL Matriz Una matriz de orden o dimensión n x p es una ordenación rectangular de elementos dispuestos en n filas y p columnas de la siguiente forma: a11 a1 a1p a1 a a p A an1 an
ELEMENTOS DE ALGEBRA LINEAL Matriz Una matriz de orden o dimensión n x p es una ordenación rectangular de elementos dispuestos en n filas y p columnas de la siguiente forma: a11 a1 a1p a1 a a p A an1 an
1. Diseño Óptimo en Variables de Estado 1
 1. Diseño Óptimo en Variables de Estado 1. Diseño Óptimo en Variables de Estado 1 1.1. Planteo del Problema 1.1.1. Criterio 3 1.. Regulador Lineal Óptimo (LQC) 5 1.3. Ecuación de Ricatti 9 1.4. Valor Medio
1. Diseño Óptimo en Variables de Estado 1. Diseño Óptimo en Variables de Estado 1 1.1. Planteo del Problema 1.1.1. Criterio 3 1.. Regulador Lineal Óptimo (LQC) 5 1.3. Ecuación de Ricatti 9 1.4. Valor Medio
Repaso de álgebra de matrices y probabilidad. Javier Santibáñez (IIMAS, UNAM) Regresión Semestre / 58
 Regresión Semestre / 58") Repaso de álgebra de matrices y probabilidad Javier Santibáñez (IIMAS, UNAM) Regresión Semestre 2017-2 1 / 58 Preliminares Definición (matriz) Una matriz de dimensión m n es un arreglo rectangular de números
Repaso de álgebra de matrices y probabilidad Javier Santibáñez (IIMAS, UNAM) Regresión Semestre 2017-2 1 / 58 Preliminares Definición (matriz) Una matriz de dimensión m n es un arreglo rectangular de números
donde,, es controlable si y solo si la matriz de controlabilidad tiene rango,
 TEORÍA DE CONTROL Tema 8. Controlabilidad y Observabilidad La controlabilidad y la observabilidad son dos conceptos desarrollados para la representación de sistemas en espacio de estado, estos permiten
TEORÍA DE CONTROL Tema 8. Controlabilidad y Observabilidad La controlabilidad y la observabilidad son dos conceptos desarrollados para la representación de sistemas en espacio de estado, estos permiten
2º INGENIERÍA INDUSTRIAL TEORÍA DE CIRCUITOS Y SISTEMAS
 º INGENIERÍA INDUSTRIAL TEORÍA DE CIRCUITOS Y SISTEMAS PRÁCTICA 7 SISTEMAS. UTILIDADES MATLAB. TRANSFORMADAS Y ANTITRANSFORMADAS Matlab permite obtener transformadas y antitransformadas de Fourier, Laplace
º INGENIERÍA INDUSTRIAL TEORÍA DE CIRCUITOS Y SISTEMAS PRÁCTICA 7 SISTEMAS. UTILIDADES MATLAB. TRANSFORMADAS Y ANTITRANSFORMADAS Matlab permite obtener transformadas y antitransformadas de Fourier, Laplace
8. Consideraciones estructurales en control SISO
 8. Consideraciones estructurales en control SISO Parte 2 Panorama de la clase: Control en avance Inyección de referencia Inyección de perturbaciones medibles CAUT1 Clase 14 1 Control en avance El uso de
8. Consideraciones estructurales en control SISO Parte 2 Panorama de la clase: Control en avance Inyección de referencia Inyección de perturbaciones medibles CAUT1 Clase 14 1 Control en avance El uso de
CAPÍTULO. Control Proporcional Integral Generalizado. II.1 Introducción. II. Control Proporcional Integral Generalizado
 CAPÍTULO II Control Proporcional Integral Generalizado II.1 Introducción El uso de observadores en electrónica de potencia no es una práctica común debido al incremento en el costo del circuito; es decir,
CAPÍTULO II Control Proporcional Integral Generalizado II.1 Introducción El uso de observadores en electrónica de potencia no es una práctica común debido al incremento en el costo del circuito; es decir,
Introducción al control óptimo
 Realización p. 1/33 Introducción al control óptimo El método de diseño por realimentación de estados y observador, no obstante ser una herramienta fundamental en el control de sistemas en E.E., no siempre
Realización p. 1/33 Introducción al control óptimo El método de diseño por realimentación de estados y observador, no obstante ser una herramienta fundamental en el control de sistemas en E.E., no siempre
INGENIERIA DE CONTROL II
 INGENIERIA DE CONTROL II COMPETENCIAS QUE ADQUIERE EL ESTUDIANTE Y RESULTADOS DEL APRENDIZAJE: El objetivo de este curso es que el estudiante conozca los conceptos básicos necesarios para realizar el control
INGENIERIA DE CONTROL II COMPETENCIAS QUE ADQUIERE EL ESTUDIANTE Y RESULTADOS DEL APRENDIZAJE: El objetivo de este curso es que el estudiante conozca los conceptos básicos necesarios para realizar el control
FACULTAD DE INGENIERÍA
 FACULTAD DE INGENIERÍA Universidad Nacional de San Juan Carrera: BIOINGENIERÍA Programa Analítico de la Cátedra: CONTROL II Año 2015 Ing. Carlos Francisco MARTÍN Profesor Titular Mg.Ing. Ana María ECHENIQUE
FACULTAD DE INGENIERÍA Universidad Nacional de San Juan Carrera: BIOINGENIERÍA Programa Analítico de la Cátedra: CONTROL II Año 2015 Ing. Carlos Francisco MARTÍN Profesor Titular Mg.Ing. Ana María ECHENIQUE
UNIVERSIDAD NACIONAL DEL CALLAO
 UNIVERSIDAD NACIONAL DEL CALLAO FACULTAD DE INGENIERIA ELECTRICA Y ELECTRONICA INSTITUTO DE INVESTIGACION DE LA FACULTAD DE INGENIERIA ELECTRICA Y ELECTRONICA INFORME FINAL DEL TEXTO TEXTO: DISEÑO DE SISTEMAS
UNIVERSIDAD NACIONAL DEL CALLAO FACULTAD DE INGENIERIA ELECTRICA Y ELECTRONICA INSTITUTO DE INVESTIGACION DE LA FACULTAD DE INGENIERIA ELECTRICA Y ELECTRONICA INFORME FINAL DEL TEXTO TEXTO: DISEÑO DE SISTEMAS
Estadística III Repaso de Algebra Lineal
 Repaso de Algebra Lineal Vectores Un vector columna de dimensión n 1 es una serie de números dispuestos como sigue: x 1 x 2 x =. x n Un vector fila de dimensión 1 p es una serie de números dispuestos como
Repaso de Algebra Lineal Vectores Un vector columna de dimensión n 1 es una serie de números dispuestos como sigue: x 1 x 2 x =. x n Un vector fila de dimensión 1 p es una serie de números dispuestos como
Planificaciones Teoría de Control II. Docente responsable: SACO ROBERTO. 1 de 5
 Planificaciones 6628 - Teoría de Control II Docente responsable: SACO ROBERTO 1 de 5 OBJETIVOS En este curso se introduce al estudiante de ingeniería electrónica a los problemas del control de sistemas
Planificaciones 6628 - Teoría de Control II Docente responsable: SACO ROBERTO 1 de 5 OBJETIVOS En este curso se introduce al estudiante de ingeniería electrónica a los problemas del control de sistemas
INTRODUCCIÓN A MATLAB. Laboratorio de Biofísica, U.T.P
 Laboratorio 11 INTRODUCCIÓN A MATLAB Laboratorio de Biofísica, U.T.P 11.1 Objetivos Familiarizarse con el entorno de la herramienta MATLAB. Iniciación en la utilización de toolbox de procesado de señales
Laboratorio 11 INTRODUCCIÓN A MATLAB Laboratorio de Biofísica, U.T.P 11.1 Objetivos Familiarizarse con el entorno de la herramienta MATLAB. Iniciación en la utilización de toolbox de procesado de señales
Control Automático I - Certamen 2 Pauta de Correción
 Control Automático I - Certamen 2 Pauta de Correción 7 de Septiembre 215 1. 1.1. Un sistema electro-mecánico tiene el modelo nominal G (s) = 1 (s+2), cuya salida es la velocidad angular de un eje. Los
Control Automático I - Certamen 2 Pauta de Correción 7 de Septiembre 215 1. 1.1. Un sistema electro-mecánico tiene el modelo nominal G (s) = 1 (s+2), cuya salida es la velocidad angular de un eje. Los
c-inversa o inversa generalizada de Rao
 c-inversa o inversa generalizada de Rao Definición.- Sea A m n. Se dice que una matriz A c de orden n m es una c-inversa o inversa generalizada en el sentido de Rao si y sólo si se verifica AA c A = A.
c-inversa o inversa generalizada de Rao Definición.- Sea A m n. Se dice que una matriz A c de orden n m es una c-inversa o inversa generalizada en el sentido de Rao si y sólo si se verifica AA c A = A.
SISTEMAS ELECTRÓNICOS DE CONTROL
 SISTEMAS ELECTRÓNICOS DE CONTROL PRÁCTICA 4: Diseño de Reguladores PID Discretos Objetivos Conocer los comandos de Matlab para discretizar sistemas continuos. Realizar simulaciones de sistemas discretos
SISTEMAS ELECTRÓNICOS DE CONTROL PRÁCTICA 4: Diseño de Reguladores PID Discretos Objetivos Conocer los comandos de Matlab para discretizar sistemas continuos. Realizar simulaciones de sistemas discretos
El principio básico del control en lazo cerrado clásico se muestra en la siguiente figura: Acciones de Control. Elementos de medición
 TEORÍA DE CONTROL Tema 11. Control por Retorno de Estado Retorno de estado lineal. El principio básico del control en lazo cerrado clásico se muestra en la siguiente figura: Sistema de Control Acciones
TEORÍA DE CONTROL Tema 11. Control por Retorno de Estado Retorno de estado lineal. El principio básico del control en lazo cerrado clásico se muestra en la siguiente figura: Sistema de Control Acciones
Unidad I Análisis de Sistemas Realimentados
 Prof. Gerardo Torres - gerardotorres@ula.ve - Cubículo 003 Departamento de Circuitos y Medidas de la Escuela de Ingeniería Eléctrica de la Universidad de Los Andes Unidad I Análisis de Sistemas Realimentados
Prof. Gerardo Torres - gerardotorres@ula.ve - Cubículo 003 Departamento de Circuitos y Medidas de la Escuela de Ingeniería Eléctrica de la Universidad de Los Andes Unidad I Análisis de Sistemas Realimentados
PRÁCTICA Nº 10. ANÁLISIS DE LA RESPUESTA EN FRECUENCIA UTILIZANDO MATLAB. DIAGRAMA DE NYQUIST
 PRÁCTICA Nº 10. ANÁLISIS DE LA RESPUESTA EN FRECUENCIA UTILIZANDO MATLAB. DIAGRAMA DE NYQUIST 10. DIAGRAMA DE NYQUIST... 1 10.1. OBJETIVOS... 1 10.. CARACTERÍSTICAS DE LA RESPUESTA EN FRECUENCIA... 1 10.3.
PRÁCTICA Nº 10. ANÁLISIS DE LA RESPUESTA EN FRECUENCIA UTILIZANDO MATLAB. DIAGRAMA DE NYQUIST 10. DIAGRAMA DE NYQUIST... 1 10.1. OBJETIVOS... 1 10.. CARACTERÍSTICAS DE LA RESPUESTA EN FRECUENCIA... 1 10.3.
10. Diseño avanzado de controladores SISO
 10. Diseño avanzado de controladores SISO Parte 2 Panorama de la Clase: Repaso: Parametrización Afín (PA) Consideraciones de diseño: grado relativo rechazo de perturbaciones esfuerzo de control robustez
10. Diseño avanzado de controladores SISO Parte 2 Panorama de la Clase: Repaso: Parametrización Afín (PA) Consideraciones de diseño: grado relativo rechazo de perturbaciones esfuerzo de control robustez
CONTROL AVANZADO I TRABAJO PRACTICO 2: REALIMENTACION DE ESTADOS
 DEPARTAMENTO DE ELECTRONICA FACULTAD DE CIENCIAS EACTAS, INGENIERIA Y AGRIMENSURA UNIVERSIDAD NACIONAL DE ROSARIO CONTROL AVANZADO I TRABAJO PRACTICO 2: REALIMENTACION DE ESTADOS Marzo de 211 1. INTRODUCCION
DEPARTAMENTO DE ELECTRONICA FACULTAD DE CIENCIAS EACTAS, INGENIERIA Y AGRIMENSURA UNIVERSIDAD NACIONAL DE ROSARIO CONTROL AVANZADO I TRABAJO PRACTICO 2: REALIMENTACION DE ESTADOS Marzo de 211 1. INTRODUCCION
1. Problema de Generación de Trayectoria
 Universidad Nacional de Ingeniería - Facultad de Ingeniería Mecánica Departamento Académico de Ingeniería Aplicada CONTROL MODERNO Y ÓPTIMO (MT 227C) Clase11-1 Elizabeth Villota Cerna Semestre 21I - UNI
Universidad Nacional de Ingeniería - Facultad de Ingeniería Mecánica Departamento Académico de Ingeniería Aplicada CONTROL MODERNO Y ÓPTIMO (MT 227C) Clase11-1 Elizabeth Villota Cerna Semestre 21I - UNI
Pontificia Universidad Católica del Perú ICA624: Control Robusto. 2. Características de los Sistemas MIMO Valores Singulares Normas Matriciales
 Pontificia Universidad Católica del Perú ICA624: Control Robusto 2. Características de los Sistemas Valores Singulares Matriciales Hanz Richter, PhD Profesor Visitante Cleveland State University Mechanical
Pontificia Universidad Católica del Perú ICA624: Control Robusto 2. Características de los Sistemas Valores Singulares Matriciales Hanz Richter, PhD Profesor Visitante Cleveland State University Mechanical
3.1. Operaciones con matrices. (Suma, resta, producto y traspuesta)
") Operaciones con matrices Suma, resta, producto y traspuesta Suma, resta y multiplicación por escalares Las matrices de un tamaño fijo m n se pueden sumar entre sí y esta operación de sumar se puede definir
Operaciones con matrices Suma, resta, producto y traspuesta Suma, resta y multiplicación por escalares Las matrices de un tamaño fijo m n se pueden sumar entre sí y esta operación de sumar se puede definir
PROBLEMAS RESUELTOS SELECTIVIDAD ANDALUCÍA 2008 MATEMÁTICAS II TEMA 3: ESPACIO AFIN Y EUCLIDEO
 PROBLEMAS RESUELTOS SELECTIVIDAD ANDALUCÍA 008 MATEMÁTICAS II TEMA 3: ESPACIO AFIN Y EUCLIDEO Junio, Ejercicio 4, Opción A Junio, Ejercicio 4, Opción B Reserva, Ejercicio 4, Opción A Reserva, Ejercicio
PROBLEMAS RESUELTOS SELECTIVIDAD ANDALUCÍA 008 MATEMÁTICAS II TEMA 3: ESPACIO AFIN Y EUCLIDEO Junio, Ejercicio 4, Opción A Junio, Ejercicio 4, Opción B Reserva, Ejercicio 4, Opción A Reserva, Ejercicio
Representación en el espacio de estado. Sistemas Control Embebidos e Instrumentación Electrónica UNIVERSIDAD EAFIT
 Representación en el espacio de estado Representación en espacio de estado Control clásico El modelado y control de sistemas basado en la transformada de Laplace, es un enfoque muy sencillo y de fácil
Representación en el espacio de estado Representación en espacio de estado Control clásico El modelado y control de sistemas basado en la transformada de Laplace, es un enfoque muy sencillo y de fácil
Rancagua, Agosto 2009
 cvalle@inf.utfsm.cl Departamento de Informática - Universidad Técnica Federico Santa María Rancagua, Agosto 2009 1 / 28 Temario 1 2 3 4 2 / 28 Temario 1 2 3 4 3 / 28 Los nombre y arreglos son equivalentes.
cvalle@inf.utfsm.cl Departamento de Informática - Universidad Técnica Federico Santa María Rancagua, Agosto 2009 1 / 28 Temario 1 2 3 4 2 / 28 Temario 1 2 3 4 3 / 28 Los nombre y arreglos son equivalentes.
d (ii) 1() 1() 0 G s H s (5.18) Además, si al evaluar: 0, raíces de multiplicidad par =0, raíces de multiplicidad impar y hay cambio de signo. (5.
 1() 1() 0 G s H s (5.18) Además, si al evaluar: 0, raíces de multiplicidad par =0, raíces de multiplicidad impar y hay cambio de signo. (5.") Problemas Resueltos de Análisis de Sistemas Lineales Continuos (i) kg() s H() s d (ii) () () ds G s H s (5.8) Además, si al evaluar: d ds G () s H () s, raíces de multiplicidad par =, raíces de multiplicidad
Problemas Resueltos de Análisis de Sistemas Lineales Continuos (i) kg() s H() s d (ii) () () ds G s H s (5.8) Además, si al evaluar: d ds G () s H () s, raíces de multiplicidad par =, raíces de multiplicidad
Examen Ingeniería de Control 12/2014
 Examen Ingeniería de Control /04 Examen Ingeniería de Control /04 Examen Ingeniería de Control /04 Examen Ingeniería de Control /04 SOLUCIÓN EJERCICIO DE ESTADO:. (0.75 puntos) Proponer y justificar qué
Examen Ingeniería de Control /04 Examen Ingeniería de Control /04 Examen Ingeniería de Control /04 Examen Ingeniería de Control /04 SOLUCIÓN EJERCICIO DE ESTADO:. (0.75 puntos) Proponer y justificar qué
Universidad Nacional de Ingeniería - Facultad de Ingeniería Mecánica Departamento Académico de Ingeniería Aplicada
 Universidad Nacional de Ingeniería - Facultad de Ingeniería Mecánica Departamento Académico de Ingeniería Aplicada CONTROL MODERNO Y ÓPTIMO (MT 227C) Clase 5-2 Elizabeth Villota Cerna Semestre 29 II -
Universidad Nacional de Ingeniería - Facultad de Ingeniería Mecánica Departamento Académico de Ingeniería Aplicada CONTROL MODERNO Y ÓPTIMO (MT 227C) Clase 5-2 Elizabeth Villota Cerna Semestre 29 II -
ESCUELA POLITÉCNICA DEL EJÉRCITO DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA CARRERA DE INGENIERÍA EN ELECTRÓNICA, AUTOMATIZACIÓN Y CONTROL
 ESCUELA POLITÉCNICA DEL EJÉRCITO DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA CARRERA DE INGENIERÍA EN ELECTRÓNICA, AUTOMATIZACIÓN Y CONTROL PROYECTO DE GRADO PARA LA OBTENCIÓN DEL TÍTULO EN INGENIERÍA DISEÑO
ESCUELA POLITÉCNICA DEL EJÉRCITO DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA CARRERA DE INGENIERÍA EN ELECTRÓNICA, AUTOMATIZACIÓN Y CONTROL PROYECTO DE GRADO PARA LA OBTENCIÓN DEL TÍTULO EN INGENIERÍA DISEÑO
Automatización de Procesos/Sistemas de Control Ing. Biomédica e Ing. Electrónica Capitulo V Controladores PID
 Automatización de Procesos/Sistemas de Control Ing. Biomédica e Ing. Electrónica Capitulo V Controladores PID D.U. Campos-Delgado Facultad de Ciencias UASLP Enero-Junio/2014 1 CONTENIDO Motivación Estructura
Automatización de Procesos/Sistemas de Control Ing. Biomédica e Ing. Electrónica Capitulo V Controladores PID D.U. Campos-Delgado Facultad de Ciencias UASLP Enero-Junio/2014 1 CONTENIDO Motivación Estructura
Trabajo autónomo 6: Diagrama de Bode y Nyquist
 Trabajo autónomo 6: Diagrama de Bode y Nyquist Nombre: Paralelo: Fecha: 11.1. Objetivos 11.1.1. Objetivo General Reforzar conocimientos referentes a gráficas en el dominio de la frecuencia haciendo uso
Trabajo autónomo 6: Diagrama de Bode y Nyquist Nombre: Paralelo: Fecha: 11.1. Objetivos 11.1.1. Objetivo General Reforzar conocimientos referentes a gráficas en el dominio de la frecuencia haciendo uso
15. LUGAR DE LAS RAICES - CONSTRUCCION
 15. LUGAR DE LAS RAICES - CONSTRUCCION 15.1 INTRODUCCION El lugar de las raíces es una construcción gráfica, en el plano imaginario, de las raíces de la ecuación característica de un lazo de control para
15. LUGAR DE LAS RAICES - CONSTRUCCION 15.1 INTRODUCCION El lugar de las raíces es una construcción gráfica, en el plano imaginario, de las raíces de la ecuación característica de un lazo de control para
 Página 1 de 19 EXAMEN A: Ejercicio nº 1.- Traza por cada punto, con regla y escuadra, una recta paralela a la recta r. Ejercicio nº 2.- Traza la mediatriz de estos segmentos y responde: Qué tienen en común
Página 1 de 19 EXAMEN A: Ejercicio nº 1.- Traza por cada punto, con regla y escuadra, una recta paralela a la recta r. Ejercicio nº 2.- Traza la mediatriz de estos segmentos y responde: Qué tienen en común
Linealización por realimentación. Linealización por realimentación
 Linealización por realimentación Objetivo específico Presentar las posibilidades que ofrece la realimentación para la linealización exacta de algunos sistemas no lineales y posterior aplicación de métodos
Linealización por realimentación Objetivo específico Presentar las posibilidades que ofrece la realimentación para la linealización exacta de algunos sistemas no lineales y posterior aplicación de métodos
1 Control Óptimo. 1.1 Introducción Problema típico de control óptimo
 1 Control Óptimo 1.1 Introducción El control óptimo es una rama del control moderno que se relaciona con el diseño de controladores para sistemas dinámicos tal que se minimice una función de medición que
1 Control Óptimo 1.1 Introducción El control óptimo es una rama del control moderno que se relaciona con el diseño de controladores para sistemas dinámicos tal que se minimice una función de medición que
1. Control de Mínima Varianza
 . Control de Mínima Varianza. CONTROL DE MÍNIMA VARIANZA..... PLANTEO DEL PROBLEMA..... CRITERIO DE OPTIMIZACIÓN...5.3. PREDICCIÓN ÓPTIMA...8.3.. Forma intuitiva...8... Caso General...0.3.. Cálculo del
. Control de Mínima Varianza. CONTROL DE MÍNIMA VARIANZA..... PLANTEO DEL PROBLEMA..... CRITERIO DE OPTIMIZACIÓN...5.3. PREDICCIÓN ÓPTIMA...8.3.. Forma intuitiva...8... Caso General...0.3.. Cálculo del
Programación MATLAB: Ecuaciones, polinomios, regresión e interpolación.
 Programación MATLAB: Ecuaciones, polinomios, regresión e interpolación. Curso: Métodos Numéricos en Ingeniería Profesor: Dr. José A. Otero Hernández Correo: j.a.otero@itesm.mx web: http://metodosnumericoscem.weebly.com
Programación MATLAB: Ecuaciones, polinomios, regresión e interpolación. Curso: Métodos Numéricos en Ingeniería Profesor: Dr. José A. Otero Hernández Correo: j.a.otero@itesm.mx web: http://metodosnumericoscem.weebly.com
MATEMÁTICA Semejanza Guía Nº 4
 MATEMÁTICA Semejanza Guía Nº 4 APELLIDO: Prof. Karina G. Rizzo. Las figuras tienen la misma forma pero distinto tamaño. No son iguales; son SEMEJANTES. 2. a) Cuando se indica construir hay que trabajar
MATEMÁTICA Semejanza Guía Nº 4 APELLIDO: Prof. Karina G. Rizzo. Las figuras tienen la misma forma pero distinto tamaño. No son iguales; son SEMEJANTES. 2. a) Cuando se indica construir hay que trabajar
{ẋ t =Ax t Bu t. Modelos en el espacio de estados. y t =Cx t Du t. Objetivos específicos. Materiales y equipo. Introducción Teórica
 1 Facultad: Ingeniería Escuela: Electrónica Asignatura: Control Digital Lugar de Ejecución: Aula 3.24 Instrumentación y Control Modelos en el espacio de estados Objetivos específicos Crear modelos en el
1 Facultad: Ingeniería Escuela: Electrónica Asignatura: Control Digital Lugar de Ejecución: Aula 3.24 Instrumentación y Control Modelos en el espacio de estados Objetivos específicos Crear modelos en el
PROBLEMAS DE ÁLGEBRA LINEAL INGENIERÍA DE TELECOMUNICACIONES - E.T.S.I.T. CURSO 2005/06
 PROBLEMAS DE ÁLGEBRA LINEAL INGENIERÍA DE TELECOMUNICACIONES - E.T.S.I.T. CURSO 200/06 1. Utilizar el método de eliminación de Gauss para resolver el sistema de ecuaciones lineales siguiente: 2 x 1 2 x
PROBLEMAS DE ÁLGEBRA LINEAL INGENIERÍA DE TELECOMUNICACIONES - E.T.S.I.T. CURSO 200/06 1. Utilizar el método de eliminación de Gauss para resolver el sistema de ecuaciones lineales siguiente: 2 x 1 2 x
Regulación y Control de Máquinas Navales Práctica Módulo 1: Modelado de Sistemas Curso
 Regulación y Control de Máquinas Navales Práctica Módulo 1: Modelado de Sistemas Curso 2007-2008 I INTRODUCCIÓN La práctica descrita en este documento pretende familiarizar al alumno con los conceptos
Regulación y Control de Máquinas Navales Práctica Módulo 1: Modelado de Sistemas Curso 2007-2008 I INTRODUCCIÓN La práctica descrita en este documento pretende familiarizar al alumno con los conceptos
Espacio de estado.- el espacio n dimensional cuyos ejes de coordenadas consisten en el eje X1, X2... Xn y se denomina espacio de estado
 ANÁLII DE ITEMA DE CONTROL CON EL EPACIO DE ETADO La teoria de control clásica se basa en técnicas gráficas de tanteo y error mientras el control moderno es mas preciso Además se puede usar en sistemas
ANÁLII DE ITEMA DE CONTROL CON EL EPACIO DE ETADO La teoria de control clásica se basa en técnicas gráficas de tanteo y error mientras el control moderno es mas preciso Además se puede usar en sistemas