E N G R A N A J E S INTRODUCCION
|
|
|
- Rosa María Carrasco Cabrera
- hace 8 años
- Vistas:
Transcripción
1 E N G R A N A J E S INTRODUCCION Un engranaje es un mecanismo de transmisión, es decir, se utiliza para transmitir el movimiento de rotación entre dos árboles. Está formado por dos ruedas dentadas que engranan entre sí, montadas solidariamente a sus respectivos árboles, de tal forma, que el movimiento se transmite por efecto de los dientes que entran en contacto. La rueda de menor número de dientes se denomina piñón, y la de mayor número de dientes se denomina corona. En el modo de funcionamiento habitual de un engranaje, el piñón es el elemento que transmite el giro, rueda conductora, mientras que la corona hace el papel de rueda conducida. Un parámetro fundamental de diseño de estos mecanismos es la relación de transmisión i; se denomina así a la relación entre las velocidades angulares de las ruedas conductora n 1 y conducida n 2. i=n 1 /n 2 Los engranajes se utilizan, fundamentalmente, como mecanismos reductores de velocidad, ya que los diferentes tipos de motores (térmicos, eléctricos, neumáticos, hidráulicos, etc.), para una potencia determinada, desarrollan un par motor reducido a una velocidad angular relativamente elevada. Sin embargo, con la aplicación de un mecanismo reductor de velocidad se consigue desarrollar en el árbol motriz un par motor elevado con una velocidad de salida más reducida.

2 CLASIFICACION DE LOS ENGRANAJES Los engranajes se pueden clasificar atendiendo a la posición relativa de sus ejes. 1. Engranajes de ejes paralelos. Utilizan ruedas dentadas cilíndricas con dentado recto o con dentado helicoidal. 2. Engranajes de ejes cruzados. Utilizan ruedas con dentado helicoidal, cilíndricas o cónicas; también pueden estar constituidos por una rueda helicoidal y un tornillo sinfín. 3. Engranajes de ejes concurrentes. Utilizan ruedas dentadas cónicas con dentado recto o con dentado helicoidal.

3 DEFINICIONES GEOMETRICAS A continuación se hace una descripción de los parámetros más importantes referentes al dentado de una rueda dentada perteneciente a un engranaje, independientemente del tipo de rueda utilizada. En sucesivos apartados se estudiarán las particularidades de cada tipo de rueda. RUEDA CONJUGADA: cualquiera de las dos ruedas dentadas de un engranaje respecto a la otra. DIENTE: en una rueda dentada, cada uno de los elementos salientes destinados a asegurar, por contacto con los dientes de la rueda conjugada, el arrastre de la rueda por su conjugada. HUECO ENTRE DIENTES: espacio que separa dos dientes contiguos de una rueda dentada. SUPERFICIE DE CABEZA: superficie coaxial a la rueda dentada que limita las puntas de los dientes. SUPERFICIE DE PIE: superficie coaxial a la rueda dentada que limita el fondo de los huecos entre dientes. FLANCO DEL DIENTE: porción de la superficie lateral de un diente comprendida entre las superficies de cabeza y de pié. Para establecer la forma del perfil de los flancos de los dientes hay que tener en cuenta los siguientes aspectos: sencillez de su tallado, disminución del rozamiento, resistencia de los dientes, asegurar un funcionamiento silencioso y exento de vibraciones. Hay una gran diversidad de formas de dientes, aunque solamente se emplean curvas cíclicas fáciles de realizar, utilizándose el perfil cicloidal y el de evolvente. El dentado con perfil cicloidal está compuesto por dos curvas, epicicloide en la parte superior del diente e hipocicloide en la parte inferior. Este dentado tiene la ventaja de una perfecta correspondencia en la forma de los dientes, con pequeña presión y, por consiguiente, mínimo desgaste, pero con el inconveniente de precisar un trazado para cada juego de ruedas o engranaje, con la consiguiente dificultad de mecanizado.

4 El dentado con perfil de evolvente está compuesto por una sola curva. Tiene la ventaja de que todas las ruedas que tienen el mismo paso, ángulo de presión, ajuste de cabeza y de pie de diente, pueden trabajar juntas e intercambiarse, modificando únicamente la distancia entre centros; a su vez, el mecanizado de este tipo de dientes se efectúa mediante herramientas sencillas. Lo anterior justifica la utilización casi exclusiva del dentado con perfil de evolvente. EVOLVENTE DE LA CIRCUNFERENCIA: curva descrita por un punto de una recta que rueda sin deslizar sobre una circunferencia fija (circunferencia base).

5 CIRCUNFERENCIA BASE: es el lugar geométrico de todos los puntos de origen de las evolventes que forman los flancos de los dientes de una rueda dentada. DIÁMETRO BASE (d b ): diámetro de la circunferencia base. FLANCO DERECHO/IZQUIERDO: para un observador que mira desde el lado de la rueda dentada convencionalmente elegido como lado de referencia, de los dos flancos, el que está a la derecha/izquierda del diente visto con la cabeza hacia arriba. FLANCOS HOMOLOGOS: en una rueda dentada, todos los flancos derechos o todos los izquierdos. FLANCO CONJUGADO: en un engranaje, uno de los flancos en contacto, considerado con relación al otro. FLANCO ACTIVO: porción del flanco de trabajo sobre el que se efectúa el contacto con los flancos de la rueda conjugada. CIRCUNFERENCIA PRIMITIVA: superficie convencional que se toma como referencia para definir las dimensiones del dentado de una rueda dentada, y la posición relativa entre las dos ruedas que constituyen el engranaje. Desde el punto de vista cinemático representa la sección circular de la rueda de fricción equivalente. Es decir, si en lugar de utilizar un engranaje, utilizamos dos ruedas de fricción, en ambos casos, para una velocidad n 1 de la rueda conductora, obtenemos una velocidad n 2 en la rueda conducida.

6 DIÁMETRO PRIMITIVO (d): diámetro de la circunferencia primitiva. LINEA DE ACCION: es la tangente común a las dos circunferencias base del engranaje, y a su vez, representa el lugar geométrico de los sucesivos puntos de contacto de los flancos conjugados. ANGULO DE PRESION (α): es el ángulo formado por la línea de acción y la tangente común a las circunferencias primitivas del engranaje; su valor es de 20º.
: es el ángulo formado por la línea de acción y la tangente común a las")
7 RUEDA DENTADA CILINDRICA CON DENTADO RECTO Es una rueda dentada cuya superficie exterior es cilíndrica, siendo las generatrices de las superficies laterales de los dientes (flancos) paralelas al eje de la rueda. DIMENSIONES PRINCIPALES CILINDRO PRIMITIVO: superficie cilíndrica, coaxial a la rueda, que se toma como referencia para definir las dimensiones del dentado. Su sección por un plano perpendicular al eje de la rueda, da lugar al círculo primitivo. CILINDRO DE CABEZA: superficie cilíndrica, coaxial a la rueda, que limita las cabezas de los dientes. Al seccionarlo por un plano perpendicular al eje de la rueda, se obtiene el círculo de cabeza. CILINDRO DE PIE: superficie cilíndrica, coaxial a la rueda, que limita los pies de los dientes. Al seccionarlo por un plano perpendicular al eje de la rueda, se obtiene el círculo de pie. DIAMETRO PRIMITIVO (d): diámetro del círculo primitivo. DIAMETRO DE CABEZA (d a ): diámetro del círculo de cabeza. d a =d+2h a DIAMETRO DE PIE (d f ): diámetro del círculo de pie. d f =d-2h f NUMERO DE DIENTES (z): es el número de dientes de la rueda. PASO (p): longitud del arco de la circunferencia primitiva comprendido entre dos flancos homólogos consecutivos. p=3,14d/z

8 MODULO (m): es la relación entre el diámetro primitivo expresado en milímetros y el número de dientes de la rueda. Su valor está normalizado. m=d/z ESPESOR DEL DIENTE (s): longitud del arco de la circunferencia primitiva comprendido entre los dos flancos de un diente. s p/2 LONGITUD DEL DIENTE (b): longitud de la parte dentada, medida siguiendo la generatriz del cilindro primitivo. ALTURA DE CABEZA DE DIENTE (h a ): distancia radial entre la circunferencia de cabeza y la circunferencia primitiva. h a =m ALTURA DE PIE DE DIENTE (h f ): distancia radial entre la circunferencia de pie y la circunferencia primitiva. h f =1,25m ALTURA DE DIENTE (h): distancia radial entre la circunferencia de cabeza y la circunferencia de pie. h=h a +h f
: distancia radial entre la circunferencia de cabeza y la circunferencia primitiva.")
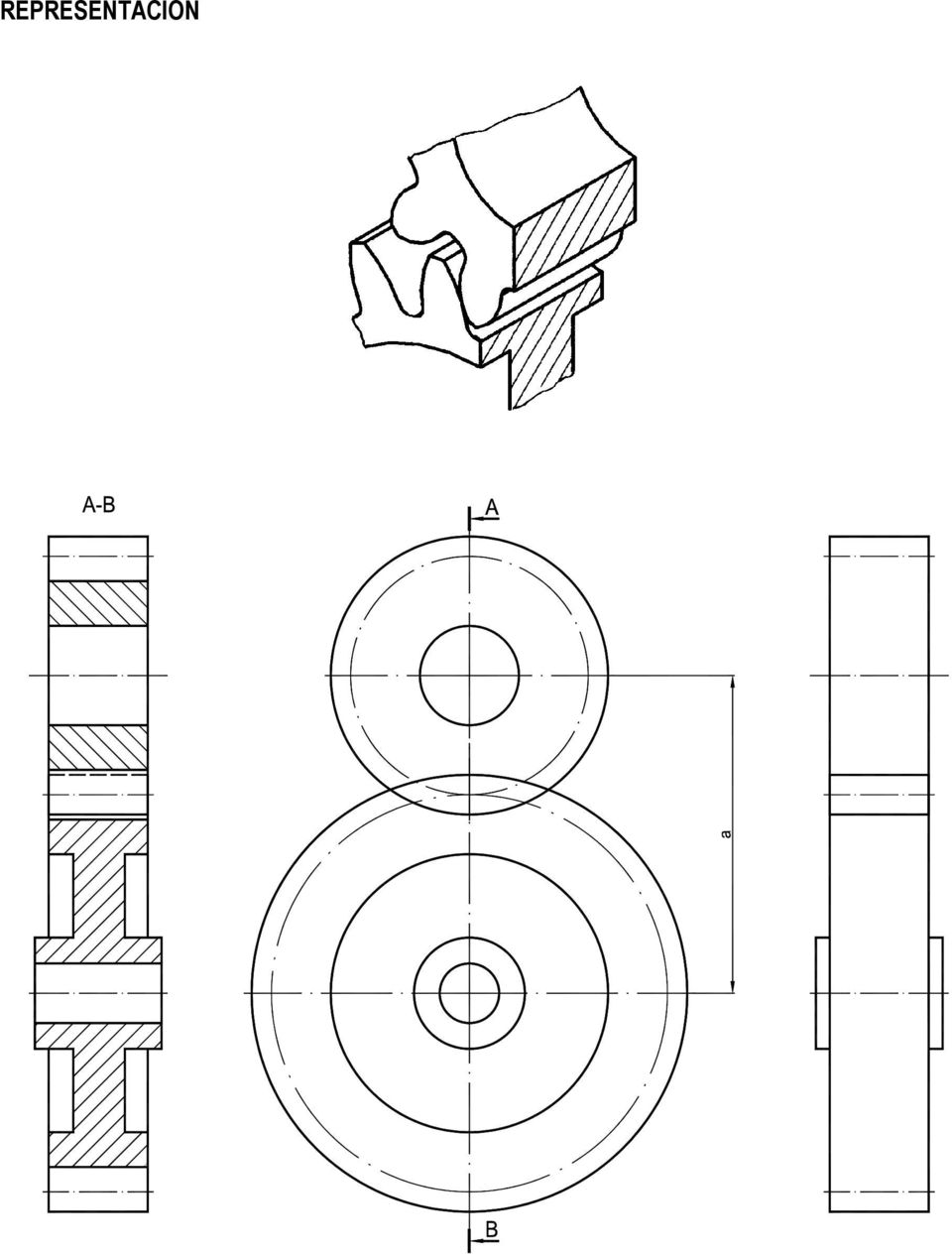
9 REPRESENTACION Y ACOTACION La representación convencional del dentado de la rueda se reduce a la representación de los cilindros de cabeza (línea continua de trazo grueso) y primitivo (línea discontinua de trazo fino y punto). Por convención, los dientes no se deben seccionar longitudinalmente; así, por ejemplo, en la vista de perfil en corte A-B se observa cómo el flanco del diente se representa en vista sin seccionar, es decir, no se raya, representando la sección de la rueda a continuación del pie del diente. Con la finalidad de centrar la atención en la parte dentada de la rueda, en este ejemplo únicamente se han indicado las cotas correspondientes al dentado, incluyendo la tabla de datos. Los restantes detalles constructivos de la rueda se acotarán según las normas del dibujo industrial.

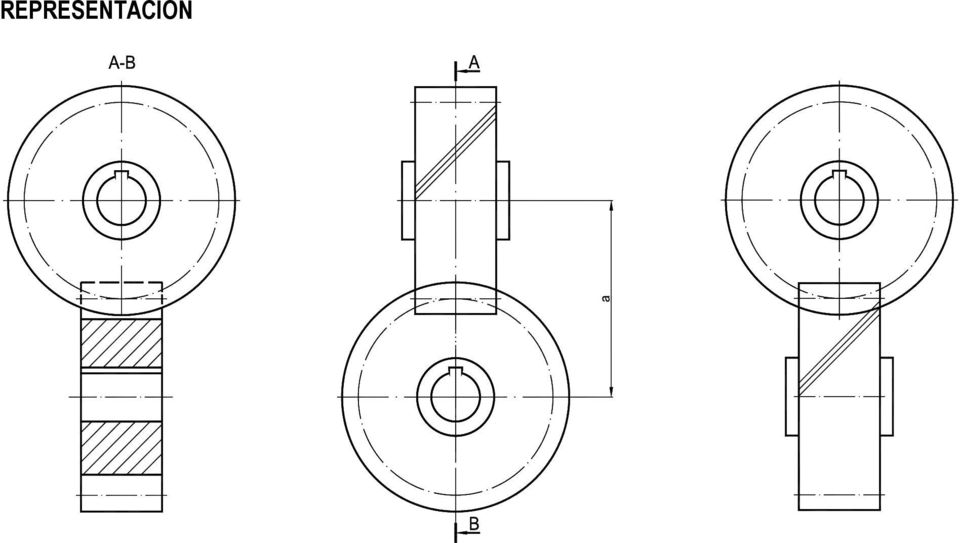
10 ENGRANAJE DE EJES PARALELOS FORMADO POR DOS RUEDAS DENTADAS CILINDRICAS CON DENTADO RECTO Dos ruedas dentadas cilíndricas con dentado recto pueden constituir un engranaje de ejes paralelos. RELACIONES ENTRE LAS DIMENSIONES DE LAS DOS RUEDAS Para conseguir un perfecto engrane, entre los diferentes parámetros dimensionales del dentado de las ruedas que constituyen el engranaje se deberán establecer las siguientes relaciones: m 1 =m 2 p 1 =p 2 h 1 =h 2 b 1 =b 2 RELACION DE TRANSMISION (i): relación entre las velocidades angulares de las ruedas conductora n 1 y conducida n 2. i=n 1 /n 2 =z 2 /z 1 =d 2 /d 1 DISTANCIA ENTRE CENTROS (a): los cilindros primitivos han de ser tangentes, en consecuencia, la distancia entre los centros de las ruedas será igual a la semisuma de los respectivos diámetros primitivos. a=(d 1 +d 2 )/2
: los cilindros primitivos han de ser tangentes, en consecuencia, la distancia entre los centros de las ruedas será igual a la semisuma de")
11 REPRESENTACION
12 RUEDA DENTADA CILINDRICA CON DENTADO HELICOIDAL Es una rueda dentada cuya superficie exterior es cilíndrica, y las generatrices de las superficies laterales de los dientes (flancos) son hélices. DIMENSIONES PRINCIPALES CILINDRO PRIMITIVO: superficie cilíndrica, coaxial a la rueda, que se toma como referencia para definir las dimensiones del dentado. Su sección, por un plano perpendicular al eje de la rueda, da lugar al círculo primitivo. CILINDRO DE CABEZA: superficie cilíndrica, coaxial a la rueda, que limita las cabezas de los dientes. Su sección, por un plano perpendicular al eje de la rueda, da lugar al círculo de cabeza. CILINDRO DE PIE: superficie cilíndrica, coaxial a la rueda, que limita los pies de los dientes. Su sección, por un plano perpendicular al eje de la rueda, da lugar al círculo de pie. DIAMETRO PRIMITIVO (d): diámetro del círculo primitivo. DIAMETRO DE CABEZA (d a ): diámetro del círculo de cabeza. d a =d+2h a DIAMETRO DE PIE (d f ): diámetro del círculo de pie. d f =d-2h f HELICE PRIMITIVA: intersección de un flanco del diente con el cilindro primitivo. ANGULO DE LA HELICE (β): ángulo agudo de la tangente a la hélice primitiva con la generatriz del cilindro primitivo. NUMERO DE DIENTES (z): es el número de dientes de la rueda.

13 PERFIL CIRCUNFERENCIAL: sección de un flanco por un plano perpendicular al eje de la rueda. PASO CIRCUNFERENCIAL (p t ): longitud del arco de la circunferencia primitiva comprendido entre dos flancos homólogos consecutivos. p t =3,14d/z MODULO CIRCUNFERENCIAL (m t ): es la relación entre el diámetro primitivo expresado en milímetros y el número de dientes de la rueda. m t =d/z
: es la relación entre el diámetro primitivo")
14 PERFIL NORMAL: sección de un flanco por un plano perpendicular a la hélice primitiva. PASO NORMAL (p n ): longitud del arco comprendido entre dos flancos homólogos consecutivos, medido a lo largo de una hélice del cilindro primitivo perpendicular a la hélice primitiva. p n =p t cosβ MODULO NORMAL (m n ): es la relación entre el paso normal expresado en milímetros y el número π.. Adopta un valor normalizado. m n =m t cosβ PERFIL AXIAL: sección de un flanco por un plano paralelo al eje de la rueda. PASO AXIAL (p x ): distancia entre dos flancos homólogos consecutivos, medido a lo largo de una generatriz del cilindro primitivo. p x =p t /tangβ MODULO AXIAL (m x ): es la relación entre el paso axial expresado en milímetros y el número π.. m x =m t /tangβ

15 LONGITUD DEL DIENTE (b): longitud de la parte dentada, medida siguiendo la generatriz del cilindro primitivo. ALTURA DE CABEZA DE DIENTE (h a ): distancia radial entre la circunferencia de cabeza y la circunferencia primitiva. h a =m n ALTURA DE PIE DE DIENTE (h f ): distancia radial entre la circunferencia de pie y la circunferencia primitiva. h f =1,25m n ALTURA DE DIENTE (h): distancia radial entre la circunferencia de cabeza y la circunferencia de pie. h=h a +h f REPRESENTACION Y ACOTACIÓN Tal como se observa en la figura, la representación convencional del dentado correspondiente a una rueda dentada cilíndrica con dentado helicoidal es idéntica al de la rueda dentada cilíndrica con dentado recto. La única diferencia se observa en la vista de perfil, en la cuál se representan tres líneas de flanco. Con la finalidad de centrar la atención en la parte dentada de la rueda, en este ejemplo únicamente se han indicado las cotas correspondientes al dentado, incluyendo la tabla de datos. Los restantes detalles constructivos de la rueda se acotarán según las normas del dibujo industrial.
: distancia radial entre la circunferencia de cabeza y la circunferencia de pie.")
16 En los engranajes constituidos por ruedas dentadas cilíndricas con dentado helicoidal, engranan simultáneamente más de un par de dientes, aunque no entran en contacto simultáneamente en toda su longitud, ya que este contacto es progresivo, proporcionando un funcionamiento suave, silencioso y con bajo nivel de vibraciones; sin embargo, el rozamiento entre los dientes y su desgaste es mayor. Al ser la transmisión de esfuerzos oblicua al eje, se produce un empuje axial que tiende a separar las ruedas que forman el engranaje. Este empuje, que se transmite a los rodamientos a través de los ejes a los que van acopladas las ruedas, se puede eliminar utilizando ruedas dentadas cilíndricas con dentado doble helicoidal, el cuál puede presentar diferentes formas constructivas: continuo, interrumpido, intercalado, intercalado-interrumpido. La siguiente figura muestra una rueda dentada cilíndrica con dentado doble-helicoidal continuo. La representación normalizada de los diferentes tipos de ruedas dentadas cilíndricas con dentado doble-helicoidal es la siguiente: Las ruedas dentadas cilíndricas con dentado helicoidal pueden formar dos tipos de engranajes: de ejes paralelos y de ejes cruzados.

17 ENGRANAJE DE EJES PARALELOS FORMADO POR DOS RUEDAS DENTADAS CILINDRICAS CON DENTADO HELICOIDAL RELACIONES ENTRE LAS DIMENSIONES DE LAS DOS RUEDAS m n1 =m n2 p n1 =p n2 h 1 =h 2 b 1 =b 2 ANGULO DE HELICE (β): el ángulo de hélice deberá ser idéntico en las dos ruedas, pero en una rueda la hélice será a izquierda y en la otra rueda la hélice será a derecha. β 1 =-β 2 RELACION DE TRANSMISION (i): relación entre las velocidades angulares de las ruedas conductora n 1 y conducida n 2. i=n 1 /n 2 =z 2 /z 1 =d 2 /d 1 DISTANCIA ENTRE CENTROS (a): los cilindros primitivos han de ser tangentes, en consecuencia, la distancia entre los centros de las ruedas será igual a la semisuma de los respectivos diámetros primitivos. a=(d 1 +d 2 )/2
: los cilindros primitivos han de ser tangentes, en consecuencia, la distancia entre los centros de las ruedas será igual a")
18 REPRESENTACION

19 ENGRANAJE DE EJES CRUZADOS A 90º FORMADO POR DOS RUEDAS DENTADAS CILINDRICAS CON DENTADO HELICOIDAL RELACIONES ENTRE LAS DIMENSIONES DE LAS DOS RUEDAS m n1 =m n2 p n1 =p n2 h 1 =h 2 b 1 =b 2 ANGULO DE HELICE (β): en general, el ángulo de hélice deberá ser idéntico y con el mismo sentido en las dos ruedas, y la suma de ambos será igual al ángulo entre ejes Σ. β 1+ β 2 =Σ β 1 =β 2 Como en este caso Σ=90º, si tenemos en cuenta las dos igualdades anteriores, se verifica: β 1 =β 2 =45º RELACION DE TRANSMISION (i): relación entre las velocidades angulares de las ruedas conductora n 1 y conducida n 2. i=n 1 /n 2 =z 2 /z 1 =d 2 /d 1 DISTANCIA ENTRE CENTROS (a): los cilindros primitivos han de ser tangentes, en consecuencia, la distancia entre los centros de las ruedas será igual a la semisuma de los respectivos diámetros primitivos. a=(d 1 +d 2 )/2

20 REPRESENTACION
21 ENGRANAJE DE TORNILLO SIN FIN Este tipo de engranaje se utiliza en la transmisión del movimiento entre dos árboles que se cruzan sin cortarse, normalmente formando un ángulo de 90º. Se compone de un tornillo cilíndrico (piñón) que engrana en una rueda dentada cilíndrica con dentado helicoidal (corona). Debido al contacto lineal existente entre el filete del tornillo y los dientes de la rueda, al girar el tornillo sin desplazarse axialmente, transmite un movimiento de giro a la rueda; de tal forma que, en una rotación completa del tornillo, la rueda gira un arco igual al paso de la rosca del tornillo. La transmisión del movimiento se realiza siempre del tornillo sin fin (rueda conductora) a la rueda helicoidal (rueda conducida) y no al revés; es decir, el sistema no es reversible. Este tipo de engranaje permite obtener una gran reducción de velocidad, presentando un bajo rozamiento y una marcha silenciosa. Sin embargo, como en todos los engranajes helicoidales, presenta un empuje axial elevado, por lo que exige la utilización de cojinetes adecuados para poder soportar dichos esfuerzos.
22 TORNILLO SIN FIN La rosca del tornillo sin fin se talla sobre una superficie cilíndrica y se caracteriza por su número de entradas o filetes, generalmente de uno a cinco. El perfil del filete correspondiente a su sección normal tiene forma trapecial y coincidirá con el de la herramienta de corte utilizada para tallar la rosca. LONGITUD DEL TORNILLO (b): longitud de la parte roscada del tornillo sin fin, medida sobre una generatriz del cilindro primitivo. b 5p x HELICE PRIMITIVA: intersección de un flanco del filete con el cilindro primitivo. ANGULO DE LA HELICE (β): ángulo agudo de la tangente a la hélice primitiva con la generatriz del cilindro primitivo. Generalmente se establece su valor entre 60º y 80º. tangβ=3,14d/p z
23 PASO HELICOIDAL (p z ): distancia entre dos puntos de intersección consecutivos de la hélice primitiva con una generatriz del cilindro primitivo. p z =p x z tornillo de una entrada (z=1) tornillo de dos entradas (z=2) El tornillo sin fin tiene su equivalente en una rueda dentada cilíndrica con dentado helicoidal con un número de dientes (z) igual al número de entradas o filetes de la rosca del tornillo. Según esto, los diferentes parámetros del dentado (filete), así como sus relaciones, se corresponden con los ya estudiados para el caso de una rueda dentada cilíndrica con dentado helicoidal. p t =3,14d/z m t =d/z p n =p t cosβ m n =m t cosβ p x =p t /tangβ m x =m t /tangβ h a =m n h f =1,25m n h=h a +h f d a =d+2h a d f =d-2h f
24 Como se puede observar en la siguiente figura, la representación y acotación del tornillo sin fin sigue los mismos criterios que los adoptados en el caso de la rueda dentada cilíndrica con dentado helicoidal. Con la finalidad de centrar la atención en la parte roscada del tornillo, en este ejemplo únicamente se han indicado las cotas correspondientes al roscado, incluyendo la tabla de datos. Los restantes detalles constructivos del tornillo se acotarán según las normas del dibujo industria.
25 RUEDA HELICOIDAL Es una rueda dentada cilíndrica con dentado helicoidal, prácticamente idéntica a la estudiada con anterioridad; sin embargo, el dentado presenta una garganta con centro de curvatura coincidente con el eje del sin fin (diente cóncavo); de este modo el contacto entre los dientes de la rueda y la hélice del sin fin es lineal, permitiendo transmitir potencias elevadas. Transversalmente, las superficies laterales de los dientes presentan un perfil angular. PLANO MEDIO: plano perpendicular al eje de la corona que pasa por el eje del tornillo conjugado (tornillo sin fin). TORO DE REFERENCIA: superficie toroidal, cuyo eje y plano medio son los mismos de la corona, que tiene por diámetro de su círculo generador el diámetro primitivo del tornillo conjugado y por radio central la distancia entre ejes del engranaje de ejes cruzados al cual se destina la corona. CIRCULO PRIMITIVO: círculo de intersección entre el toro de referencia y el plano medio de la corona. DIÁMETRO PRIMITIVO (d): diámetro del círculo primitivo. SUPERFICIE DE LA CABEZA DEL DIENTE: superficie toroidal que limita las cabezas de los dientes (garganta) y que tiene el mismo radio central que el toro de referencia. RADIO DE GARGANTA (r a ): radio del círculo generador de la superficie toroidal de la garganta. r a =a-d a /2 CIRCULO DE CABEZA: círculo de intersección entre la garganta de la cabeza del diente y el plano medio de la corona. DIÁMETRO DE CABEZA (d a ): diámetro del círculo de fondo de la garganta. d a =d+2h a
26 DIÁMETRO EXTERIOR (d e ): diámetro del cilindro exterior que envuelve a la rueda. d e =d a +2r a [1-cos(α v /2)] TORO DE PIE: superficie toroidal que limita los pies de los dientes y que tiene el mismo radio central que el toro de referencia. CIRCULO DE PIE: círculo de intersección entre el toro de pié y el plano medio de la corona. DIÁMETRO DE PIE (d f ): diámetro del círculo de pié. d f =d-2h f LONGITUD DEL DIENTE (b): longitud de la cuerda del círculo generador del toro de referencia comprendido entre los puntos de intersección de este círculo con las caras laterales del dentado. b=2[(r a +h a )sen(α v /2)] ANGULO DE LONGITUD (α v ): ángulo central del círculo generador del toro de referencia comprendido entre los puntos de intersección de este círculo con las caras laterales del dentado. α v =60º 90º Los restantes parámetros del dentado, así como sus relaciones, se corresponden con los ya estudiados para el caso de una rueda dentada cilíndrica con dentado helicoidal. p t =3,14d/z m t =d/z p n =p t cosβ m n =m t cosβ p x =p t /tangβ m x =m t /tangβ h a =m n h f =1,25m n h=h a +h f
27
28 Con la finalidad de simplificar el dibujo, en este ejemplo únicamente se han incluido las cotas correspondientes al dentado de la rueda; los restantes detalles constructivos se acotarán según las normas del dibujo industrial.
29 RELACIONES ENTRE LAS DIMENSIONES DE LA RUEDA HELICOIDAL Y DEL TORNILLO SIN FIN m n1 =m n2 p n1 =p n2 h 1 =h 2 p t2 =p x1 ANGULO DE HELICE (β): las hélices del tornillo y de la corona deberán ser del mismo sentido, y la suma de los respectivos ángulos de hélice será igual al ángulo entre ejes Σ. β 1+ β 2 =Σ Como en este caso Σ=90º, se verifica: β 1+ β 2 =90º RELACION DE TRANSMISION (i): relación entre las velocidades angulares de la rueda conductora (tornillo) n 1 y la rueda conducida (corona) n 2. i=n 1 /n 2 =z 2 /z 1 =d 2 cosβ 2 /d 1 cosβ 1 DISTANCIA ENTRE CENTROS (a): los cilindros primitivos han de ser tangentes, en consecuencia, la distancia entre los centros de las ruedas será igual a la semisuma de los respectivos diámetros primitivos. a=(d 1 +d 2 )/2
30 REPRESENTACIÓN DE UN ENGRANAJE DE EJES CRUZADOS A 90º FORMADO POR UNA RUEDA HELICOIDAL Y UN TORNILLO SIN FIN
31 RUEDA DENTADA CONICA CON DENTADO RECTO Es una rueda dentada cuya superficie exterior es cónica, convergiendo las generatrices de las superficies laterales de los dientes (flancos) en el vértice de la rueda. DIMENSIONES PRINCIPALES CONO PRIMITIVO: superficie cónica, coaxial a la rueda, que se toma como referencia para definir las dimensiones del dentado. VERTICE: vértice del cono primitivo. ANGULO DEL CONO PRIMITIVO (δ): ángulo entre el eje y la generatriz del cono primitivo. LONGITUD DE LA GENERATRIZ DEL CONO PRIMITIVO (R): distancia entre el vértice y el cono complementario externo, medida siguiendo una generatriz del cono primitivo. R=d/2senδ CIRCULO PRIMITIVO: intersección del cono primitivo con el cono complementario externo. DIAMETRO PRIMITIVO (d): diámetro del círculo primitivo. CONO COMPLEMENTARIO EXTERNO: cono cuyas generatrices son perpendiculares a las del cono primitivo en el extremo exterior de la longitud del diente. CONO COMPLEMENTARIO INTERNO: cono cuyas generatrices son perpendiculares a las del cono primitivo en el extremo interior de la longitud del diente.
32 CONO DE CABEZA: superficie cónica, coaxial a la rueda, que limita las cabezas de los dientes. ANGULO DEL CONO DE CABEZA (δ a ): ángulo entre el eje y la generatriz del cono de cabeza. CIRCULO DE CABEZA: intersección del cono de cabeza con el cono complementario externo. DIAMETRO DE CABEZA (d a ): diámetro del círculo de cabeza. d a =d+2h a cosδ CONO DE PIE: superficie cónica, coaxial a la rueda, que limita los pies de los dientes. ANGULO DEL CONO DE PIE (δ f ): ángulo entre el eje y la generatriz del cono de pie. CIRCULO DE PIE: intersección del cono de pie con el cono complementario externo. DIAMETRO DE PIE (d f ): diámetro del círculo de pie. d f =d-2h f cosδ PERFIL CIRCUNFERENCIAL: sección de los flancos de los dientes por el cono complementario externo. SUPERFICIE DE REFERENCIA: superficie plana de la rueda dentada en relación a la cual se determina su posición. DISTANCIA DE REFERENCIA: distancia entre el vértice y la superficie de referencia. NUMERO DE DIENTES (z): es el número de dientes de la rueda. PASO (p): longitud del arco de la circunferencia primitiva comprendido entre dos flancos homólogos consecutivos. p=3,14d/z MODULO (m): es la relación entre el diámetro primitivo expresado en milímetros y el número de dientes de la rueda. Su valor está normalizado. m=d/z ESPESOR DEL DIENTE (s): longitud del arco de la circunferencia primitiva comprendido entre los dos flancos de un diente. s p/2 LONGITUD DEL DIENTE (b): longitud de la parte dentada, medida siguiendo la generatriz del cono primitivo.
33 ALTURA DE CABEZA DE DIENTE (h a ): distancia radial entre la circunferencia de cabeza y la circunferencia primitiva, medido siguiendo una generatriz del cono complementario externo. h a =m ANGULO DE CABEZA DE DIENTE (θ a ): ángulo entre las generatrices del cono de cabeza y del cono primitivo. θ a =δ a -δ tangθ a =h a /R ALTURA DE PIE DE DIENTE (h f ): distancia radial entre la circunferencia de pie y la circunferencia primitiva, medido siguiendo una generatriz del cono complementario externo. h f =1,25m ANGULO DE PIE DE DIENTE (θ f ): ángulo entre las generatrices del cono de pie y del cono primitivo. θ f =δ-δ f tangθ f =h f /R ALTURA DE DIENTE (h): distancia radial entre la circunferencia de cabeza y la circunferencia de pie, medido siguiendo una generatriz del cono complementario externo. h=h a +h f
34
35 REPRESENTACION Y ACOTACION En la representación de la rueda se observa la convergencia de los vértices de los conos: primitivo, de cabeza y de pie, en el vértice de la rueda; así como la perpendicularidad entre las generatrices de los conos complementarios y las generatrices del cono primitivo. Con la finalidad de simplificar el dibujo, en este ejemplo únicamente se han incluido las cotas correspondientes al dentado de la rueda; los restantes detalles constructivos se acotarán según las normas del dibujo industrial.
36 ENGRANAJE DE EJES CONCURRENTES A 90º FORMADO POR DOS RUEDAS DENTADAS CONICAS CON DENTADO RECTO RELACIONES ENTRE LAS DIMENSIONES DE LAS DOS RUEDAS m 1 =m 2 p 1 =p 2 h 1 =h 2 b 1 =b 2 RELACION DE TRANSMISION (i): relación entre las velocidades angulares de las ruedas conductora n 1 y conducida n 2. i=n 1 /n 2 =z 2 /z 1 =d 2 /d 1 CONOS PRIMITIVOS: los conos primitivos deberán de ser tangentes, convergiendo sus vértices en el punto de intersección de los ejes. Según lo anterior, la suma de los ángulos de los conos primitivos será igual al ángulo entre ejes Σ. δ 1 +δ 2 =Σ Como en este caso Σ=90º, si tenemos en cuenta la igualdad anterior, se verifica: 1 m tangδ 1 =d 1 /d 2 =z 1 /z 2 tangδ 2 =d 2 /d 1 =z 2 /z 1 R = d + d = z + z
37 REPRESENTACIÓN En las siguientes figuras se puede observar la convergencia de los vértices de las ruedas en el punto donde concurren los ejes; así como la tangencia entre los conos primitivos.
ENGRANAJE DE TORNILLO SIN FIN
 ENGRANAJE DE TORNILLO SIN FIN Este tipo de engranaje se utiliza en la transmisión del movimiento entre dos árboles que se cruzan sin cortarse, normalmente formando un ángulo de 90º. Se compone de un tornillo
ENGRANAJE DE TORNILLO SIN FIN Este tipo de engranaje se utiliza en la transmisión del movimiento entre dos árboles que se cruzan sin cortarse, normalmente formando un ángulo de 90º. Se compone de un tornillo
d a =d+2h a d f =d-2h f NUMERO DE DIENTES (z): es el número de dientes de la rueda.
: es el número de dientes de la rueda.") RUEDA DENTADA CILINDRICA CON DENTADO RECTO Es una rueda dentada cuya superficie exterior es cilíndrica, siendo las generatrices de las superficies laterales de los dientes (flancos) paralelas al eje de
RUEDA DENTADA CILINDRICA CON DENTADO RECTO Es una rueda dentada cuya superficie exterior es cilíndrica, siendo las generatrices de las superficies laterales de los dientes (flancos) paralelas al eje de
TEORÍA DE MECANISMOS NOMENCLATURA Y TALLADO DE DIENTES DE ENGRANAJES
 Hoja: 1/12 GP NOMENCLATURA Y TALLADO DE DIENTES DE ENGRANAJES INTRODUCCIÓN El desarrollo de esta práctica consistirá en la simulación del procedimiento de talla de una rueda dentada mediante la generación
Hoja: 1/12 GP NOMENCLATURA Y TALLADO DE DIENTES DE ENGRANAJES INTRODUCCIÓN El desarrollo de esta práctica consistirá en la simulación del procedimiento de talla de una rueda dentada mediante la generación
Tècnic Auxiliar en Disseny Industrial - Engranajes rectos. Trazado de los dientes
 1.- Engranajes rectos. Sirven para transmitir movimiento circular o lineal (caso de las cremalleras) entre dos ejes paralelos. Es una forma de mejorar la rotación entre dos cilindros que tienen sus caras
1.- Engranajes rectos. Sirven para transmitir movimiento circular o lineal (caso de las cremalleras) entre dos ejes paralelos. Es una forma de mejorar la rotación entre dos cilindros que tienen sus caras
E N G R A N A J E S INTRODUCCION
 E N G R A N A J E S INTRODUCCION Un engranaje es un mecanismo de transmisión, es decir, se utiliza para transmitir el movimiento de rotación entre dos árboles. Está formado por dos ruedas dentadas que
E N G R A N A J E S INTRODUCCION Un engranaje es un mecanismo de transmisión, es decir, se utiliza para transmitir el movimiento de rotación entre dos árboles. Está formado por dos ruedas dentadas que
Estos elementos mecánicos suelen ir montados sobre los ejes de transmisión, que son piezas cilíndricas sobre las cuales se colocan los mecanismos.
 MECANISMOS A. Introducción. Un mecanismo es un dispositivo que transforma el movimiento producido por un elemento motriz (fuerza de entrada) en un movimiento deseado de salida (fuerza de salida) llamado
MECANISMOS A. Introducción. Un mecanismo es un dispositivo que transforma el movimiento producido por un elemento motriz (fuerza de entrada) en un movimiento deseado de salida (fuerza de salida) llamado
Engranaje. Tipos de engranajes. Por aplicaciones especiales se pueden citar: Planetarios Interiores De cremallera
 Engranaje Engranaje es una rueda o cilindro dentado empleado para transmitir un movimiento giratorio o alternativo desde una parte de una máquina a otra. Un conjunto de dos o más engranajes que transmite
Engranaje Engranaje es una rueda o cilindro dentado empleado para transmitir un movimiento giratorio o alternativo desde una parte de una máquina a otra. Un conjunto de dos o más engranajes que transmite
08/05/2013 FIMAAS UTP. Ing. Automotriz. Profesor: Carlos Alvarado de la Portilla
 UTP FIMAAS Ing. Automotriz Curso: Mecanismos del automóvil Sesión Nº 5: La caja de transmisión mecánica, funcion, descripción, funcionamiento, tipos. 1 Bibliografía http://www.youtube.com/watch?v=9j- 3xw0VxiM&feature=related
UTP FIMAAS Ing. Automotriz Curso: Mecanismos del automóvil Sesión Nº 5: La caja de transmisión mecánica, funcion, descripción, funcionamiento, tipos. 1 Bibliografía http://www.youtube.com/watch?v=9j- 3xw0VxiM&feature=related
DIMENSIONES PRINCIPALES CONO PRIMITIVO: superficie cónica, coaxial a la rueda, que se toma como referencia para definir las dimensiones del dentado.
 RUEDA DENTADA CONICA CON DENTADO RECTO Es una rueda dentada cuya superficie exterior es cónica, convergiendo las generatrices de las superficies laterales de los dientes (flancos) en el vértice de la rueda.
RUEDA DENTADA CONICA CON DENTADO RECTO Es una rueda dentada cuya superficie exterior es cónica, convergiendo las generatrices de las superficies laterales de los dientes (flancos) en el vértice de la rueda.
OPERADORES MECANICOS
 OPERADORES MECANICOS 0.- INTRODUCCION 1.- OPERADORES QUE ACUMULAN ENERGIA MECANICA 1.1.- Gomas 1.2.- Muelles 1.3.- Resortes 2.- OPERADORES QUE TRANSFORMAN Y TRANSMITEN LA ENERGIA MECANICA 2.1- Soportes
OPERADORES MECANICOS 0.- INTRODUCCION 1.- OPERADORES QUE ACUMULAN ENERGIA MECANICA 1.1.- Gomas 1.2.- Muelles 1.3.- Resortes 2.- OPERADORES QUE TRANSFORMAN Y TRANSMITEN LA ENERGIA MECANICA 2.1- Soportes
Ingeniería Gráfica Aplicada
 Acotación Ingeniería Gráfica Aplicada Curso 2010-11 Manuel I. Bahamonde García Índice Acotación 1. Principios generales de acotación 2. Método de acotación 3. Acotación de círculos, radios, arcos, cuadrados
Acotación Ingeniería Gráfica Aplicada Curso 2010-11 Manuel I. Bahamonde García Índice Acotación 1. Principios generales de acotación 2. Método de acotación 3. Acotación de círculos, radios, arcos, cuadrados
ENGRANAJES CÓNICOS 1. INTRODUCCIÓN
 ENGRANAJE CÓNICO 1. INTRODUCCIÓN e utilizan cuando queremos transmitir movimiento entre dos ejes que se cortan. Lo que en engranajes cilíndrico rectos eran cilindros primitivos, ahora se convierten en
ENGRANAJE CÓNICO 1. INTRODUCCIÓN e utilizan cuando queremos transmitir movimiento entre dos ejes que se cortan. Lo que en engranajes cilíndrico rectos eran cilindros primitivos, ahora se convierten en
DIBUJO TÉCNICO. Para hacer círculos en lápiz o en tinta se recurría a distintos " tipos de compa se s.
 DIBUJO TÉCNICO DIBUJO TÉCNICO El dibujo técnico es una de las formas de representar el diseño de artefactos y de transmitir información técnica. La transmisión de la información técnica supone una serie
DIBUJO TÉCNICO DIBUJO TÉCNICO El dibujo técnico es una de las formas de representar el diseño de artefactos y de transmitir información técnica. La transmisión de la información técnica supone una serie
11 knúmero de publicación: 2 141 353. 51 kint. Cl. 6 : F16H 37/04. Número de solicitud europea: 95919718.7 86 kfecha de presentación : 12.05.
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 141 33 1 kint. Cl. 6 : F16H 37/04 F16H 7/02 B2J 18/00 B2J 9/ H02K 7/116 12 k TRADUCCION DE PATENTE EUROPEA T3 86 k Número
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 141 33 1 kint. Cl. 6 : F16H 37/04 F16H 7/02 B2J 18/00 B2J 9/ H02K 7/116 12 k TRADUCCION DE PATENTE EUROPEA T3 86 k Número
Prototipo de motor de combustión
 Asociación Española de Ingeniería Mecánica XVIII CONGRESO NACIONAL DE INGENIERÍA MECÁNICA Prototipo de motor de combustión A. de Andrés, E. García Dpto. Ingeniería Mecánica, Universidad Pontificia Comillas
Asociación Española de Ingeniería Mecánica XVIII CONGRESO NACIONAL DE INGENIERÍA MECÁNICA Prototipo de motor de combustión A. de Andrés, E. García Dpto. Ingeniería Mecánica, Universidad Pontificia Comillas
MECANISMOS Y MÁQUINAS 2008 I. ZABALZA VILLAVA
 SÍNTESIS DE MECANISMOS Y MÁQUINAS 008 I. ZABALZA VILLAVA Síntesis de Mecanismos y Máquinas INDICE CAPÍTULO I SÍNTESIS DE LEVAS... 1 I.1 INTRODUCCIÓN... 1 I. CLASIFICACIÓN DE LAS LEVAS... 1 I.3 DIAGRAMA
SÍNTESIS DE MECANISMOS Y MÁQUINAS 008 I. ZABALZA VILLAVA Síntesis de Mecanismos y Máquinas INDICE CAPÍTULO I SÍNTESIS DE LEVAS... 1 I.1 INTRODUCCIÓN... 1 I. CLASIFICACIÓN DE LAS LEVAS... 1 I.3 DIAGRAMA
INDICE INTRODUCCIÓN. CONCEPTOS FUNDAMENTALES. PALANCAS. POLEAS. RUEDA Y EJE. Transmisiones de Banda Simples. Engranajes
 Departamento de Física Universidad de Jaén INTRODUCCIÓN A LAS MÁQUINAS SIMPLES Y COMPUESTAS Aplicación a la Ingeniería de los capítulos del temario de la asignatura FUNDAMENTOS FÍSICOS I (I.T.MINAS): Tema
Departamento de Física Universidad de Jaén INTRODUCCIÓN A LAS MÁQUINAS SIMPLES Y COMPUESTAS Aplicación a la Ingeniería de los capítulos del temario de la asignatura FUNDAMENTOS FÍSICOS I (I.T.MINAS): Tema
DEPARTAMENTO DE TECNOLOGÍA Actividades complementarias Curso: 1º Bach. Profesor: José Jiménez R. Tema 18: Elementos de máquinas y sistemas (I)
") PARTAMENTO 1.- Un tocadiscos dispone de unas ruedas de fricción interiores para mover el plato sobre el cual se colocan los discos. La rueda del plato tiene 20 cm de diámetro, y el diámetro de la rueda
PARTAMENTO 1.- Un tocadiscos dispone de unas ruedas de fricción interiores para mover el plato sobre el cual se colocan los discos. La rueda del plato tiene 20 cm de diámetro, y el diámetro de la rueda
REPRESENTACIÓN GRÁFICA. La representación gráfica que realizamos de nuestros proyectos están sujetas a las normas UNE, siguientes:
 REPRESENTACIÓN GRÁFICA La representación gráfica que realizamos de nuestros proyectos están sujetas a las normas UNE, siguientes: NORMA UNE 1032 NORMA UNE 1026 NORMA UNE 1011 NORMA UNE 1041 NORMA UNE 1036
REPRESENTACIÓN GRÁFICA La representación gráfica que realizamos de nuestros proyectos están sujetas a las normas UNE, siguientes: NORMA UNE 1032 NORMA UNE 1026 NORMA UNE 1011 NORMA UNE 1041 NORMA UNE 1036
PRISMA OBLICUO > REPRESENTACIÓN Y DESARROLLO POR EL MÉTODO DE LA SECCIÓN NORMAL
 1. CARACTERÍSTICAS GENERALES DEL PRISMA OBLICUO Desde el punto de vista de la representación en SISTEMA DIÉDRICO, el prisma oblicuo presenta dos características importantes que lo diferencian del prisma
1. CARACTERÍSTICAS GENERALES DEL PRISMA OBLICUO Desde el punto de vista de la representación en SISTEMA DIÉDRICO, el prisma oblicuo presenta dos características importantes que lo diferencian del prisma
TRANSMISIONES DEL TRACTOR
 TRANSMISIONES DEL TRACTOR En el tractor encontramos: Embrague. Convertidor de par. Doble embrague. Embrague hidráulico Caja de cambio Alta y Baja constante Mecánica Clásica En toma Sincronizada Automática
TRANSMISIONES DEL TRACTOR En el tractor encontramos: Embrague. Convertidor de par. Doble embrague. Embrague hidráulico Caja de cambio Alta y Baja constante Mecánica Clásica En toma Sincronizada Automática
TEMA 8: TRAZADOS GEOMÉTRICOS
 EDUCACIÓN PLÁSTICA Y VISUAL 3º DE LA E.S.O. TEMA 8: TRAZADOS GEOMÉTRICOS En dibujo técnico, es fundamental conocer los trazados geométricos básicos para construir posteriormente formas o figuras de mayor
EDUCACIÓN PLÁSTICA Y VISUAL 3º DE LA E.S.O. TEMA 8: TRAZADOS GEOMÉTRICOS En dibujo técnico, es fundamental conocer los trazados geométricos básicos para construir posteriormente formas o figuras de mayor
TEMA 1: REPRESENTACIÓN GRÁFICA. 0.- MANEJO DE ESCUADRA Y CARTABON (Repaso 1º ESO)
") TEMA 1: REPRESENTACIÓN GRÁFICA 0.- MANEJO DE ESCUADRA Y CARTABON (Repaso 1º ESO) Son dos instrumentos de plástico transparente que se suelen usar de forma conjunta. La escuadra tiene forma de triángulo
TEMA 1: REPRESENTACIÓN GRÁFICA 0.- MANEJO DE ESCUADRA Y CARTABON (Repaso 1º ESO) Son dos instrumentos de plástico transparente que se suelen usar de forma conjunta. La escuadra tiene forma de triángulo
11 kn. de publicación: ES 2 076 749. 51 kint. Cl. 6 : B23F 15/06
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 kn. de publicación: ES 2 076 749 1 kint. Cl. 6 : B23F 1/06 B23F 23/12 B23F 21/02 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 kn. de publicación: ES 2 076 749 1 kint. Cl. 6 : B23F 1/06 B23F 23/12 B23F 21/02 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea:
DIBUJO TÉCNICO. UNIDAD DIDÁCTICA 9: Geometría 2D (V)
") UNIDAD DIDÁCTICA 9: Geometría 2D (V) ÍNDICE Página: 1 CURVAS CÓNICAS. ELEMENTOS CARACTERÍSTICOS.. 2 2 TRAZADO MEDIANTE RADIOS VECTORES 4 3 RECTAS TANGENTES A CÓNICAS 5 3.1 CIRCUNFERENCIAS FOCALES 6 3.2
UNIDAD DIDÁCTICA 9: Geometría 2D (V) ÍNDICE Página: 1 CURVAS CÓNICAS. ELEMENTOS CARACTERÍSTICOS.. 2 2 TRAZADO MEDIANTE RADIOS VECTORES 4 3 RECTAS TANGENTES A CÓNICAS 5 3.1 CIRCUNFERENCIAS FOCALES 6 3.2
TEMA 5 : MECANISMOS RELACIÓN 1: PROBLEMAS DE PALANCAS.
 NOMBRE ALUMNO Y CURSO: TEMA 5 : MECANISMOS EL DÍA DEL CONTROL el alumno deberá entregar la libreta con los apuntes y esquemas realizados en clase y en estas fichas los ejercicios resueltos y corregidos.
NOMBRE ALUMNO Y CURSO: TEMA 5 : MECANISMOS EL DÍA DEL CONTROL el alumno deberá entregar la libreta con los apuntes y esquemas realizados en clase y en estas fichas los ejercicios resueltos y corregidos.
MECANISMOS. Veamos los distintos tipos de mecanismos que vamos a estudiar uno a uno.
 MECANISMOS En tecnología, cuando se diseña una máquina, lo más normal es que esté movida por un motor, que tiene un movimiento circular, pero a veces no es ese el tipo de movimiento que necesitamos. En
MECANISMOS En tecnología, cuando se diseña una máquina, lo más normal es que esté movida por un motor, que tiene un movimiento circular, pero a veces no es ese el tipo de movimiento que necesitamos. En
CUADERNILLO DE PRACTICA-5: Trenes de engranajes ordinarios. Análisis de una caja de velocidad:
 CUADERNILLO DE PRACTICA-5: Trenes de engranajes ordinarios. Análisis de una caja de velocidad: Alumno:.. DNI:.. Fecha:... Por el profesor de la práctica.-rafael Sánchez Sánchez NOTA: Este cuadernillo debrá
CUADERNILLO DE PRACTICA-5: Trenes de engranajes ordinarios. Análisis de una caja de velocidad: Alumno:.. DNI:.. Fecha:... Por el profesor de la práctica.-rafael Sánchez Sánchez NOTA: Este cuadernillo debrá
Dpto. de tecnología, IES. Cristóbal de Monroy.
 1.- TRENES DE ENGRANAJES Se llama tren de engranajes a aquella transmisión en la que existen más de dos engranajes. Los trenes de engranajes se utilizan cuando: La relación de transmisión que se quiere
1.- TRENES DE ENGRANAJES Se llama tren de engranajes a aquella transmisión en la que existen más de dos engranajes. Los trenes de engranajes se utilizan cuando: La relación de transmisión que se quiere
Introducción al dibujo técnico.
 INTRODUCCIÓN AL DIBUJO TÉCNICO. 1/10 Introducción al dibujo técnico. Introducción. Mientras que el dibujo artístico intenta transmitir emociones, el dibujo técnico pretende transmitir información técnica
INTRODUCCIÓN AL DIBUJO TÉCNICO. 1/10 Introducción al dibujo técnico. Introducción. Mientras que el dibujo artístico intenta transmitir emociones, el dibujo técnico pretende transmitir información técnica
ACTIVIDAD TRANSVERSAL INTERDISCIPLINAR: PROYECTO PIÑÓN CORONA
 ACTIVIDAD TRANSVERSAL INTERDISCIPLINAR: PROYECTO PIÑÓN CORONA AUTORÍA JOSÉ MARÍA MUÑOZ VIDAL TEMÁTICA TECNOLOGÍA ETAPA ESO, BACHILLERATO Resumen Se ha realizado un estudio pormenorizado de un engranaje
ACTIVIDAD TRANSVERSAL INTERDISCIPLINAR: PROYECTO PIÑÓN CORONA AUTORÍA JOSÉ MARÍA MUÑOZ VIDAL TEMÁTICA TECNOLOGÍA ETAPA ESO, BACHILLERATO Resumen Se ha realizado un estudio pormenorizado de un engranaje
Sistema Diédrico (I). Verdadera magnitud. Abatimientos
. Verdadera magnitud. Abatimientos") Sistema Diédrico (I). Verdadera magnitud. Abatimientos Cuando dibujamos las proyecciones diédricas (planta, alzado y perfil) de una figura, superficie, sólido, etc.., observamos cómo sus elementos (aristas
Sistema Diédrico (I). Verdadera magnitud. Abatimientos Cuando dibujamos las proyecciones diédricas (planta, alzado y perfil) de una figura, superficie, sólido, etc.., observamos cómo sus elementos (aristas
Inversión en el plano
 Inversión en el plano Radio de la circunferencia x 2 + y 2 + Ax + By + D = 0 Circunferencia de centro (a, b) y radio r: (x a) 2 + (y b) 2 = r 2. Comparando: x 2 + y 2 2ax 2by + a 2 + b 2 r 2 = 0 con x
Inversión en el plano Radio de la circunferencia x 2 + y 2 + Ax + By + D = 0 Circunferencia de centro (a, b) y radio r: (x a) 2 + (y b) 2 = r 2. Comparando: x 2 + y 2 2ax 2by + a 2 + b 2 r 2 = 0 con x
OBJETIVO Nº 1.2.NORMALIZACION
 OBJETIVO Nº 1.2.NORMALIZACION La ISO (International Standarization Organization) es la entidad internacional encargada de favorecer la normalización en el mundo. Con sede en Ginebra, es una federación
OBJETIVO Nº 1.2.NORMALIZACION La ISO (International Standarization Organization) es la entidad internacional encargada de favorecer la normalización en el mundo. Con sede en Ginebra, es una federación
EJERCICIOS DE MECANISMOS
 DEPARTAMENTO DE TECNOLOGÍA I.E.S. Iturralde EJERCICIOS DE MECANISMOS CURSO: DEPARTAMENTO DE TECNOLOGÍA 0 PALANCAS EJERCICIOS DE ELECTRICIDAD PALANCAS 1. Enumera la ley de la palanca y escribe su fórmula
DEPARTAMENTO DE TECNOLOGÍA I.E.S. Iturralde EJERCICIOS DE MECANISMOS CURSO: DEPARTAMENTO DE TECNOLOGÍA 0 PALANCAS EJERCICIOS DE ELECTRICIDAD PALANCAS 1. Enumera la ley de la palanca y escribe su fórmula
Geometría Tridimensional
 Capítulo 4 Geometría Tridimensional En dos dimensiones trabajamos en el plano mientras que en tres dimensiones trabajaremos en el espacio, también provisto de un sistema de coordenadas. En el espacio,
Capítulo 4 Geometría Tridimensional En dos dimensiones trabajamos en el plano mientras que en tres dimensiones trabajaremos en el espacio, también provisto de un sistema de coordenadas. En el espacio,
Código/Título de la Unidad Didáctica: MATEMÁTICAS BASICAS APLICADAS EN EL MECANIZADO. Actividad nº/título: REGLA DE TRES y SISTEMAS DE COORDENADAS
 Código/Título de la Unidad Didáctica: MATEMÁTICAS BASICAS APLICADAS EN EL MECANIZADO Actividad nº/título: REGLA DE TRES y SISTEMAS DE COORDENADAS Introducción a la actividad Material Didáctico: Tiempo:
Código/Título de la Unidad Didáctica: MATEMÁTICAS BASICAS APLICADAS EN EL MECANIZADO Actividad nº/título: REGLA DE TRES y SISTEMAS DE COORDENADAS Introducción a la actividad Material Didáctico: Tiempo:
De acuerdo con sus características podemos considerar tres tipos de vectores:
 CÁLCULO VECTORIAL 1. ESCALARES Y VECTORES 1.1.-MAGNITUDES ESCALARES Y VECTORIALES Existen magnitudes físicas cuyas cantidades pueden ser expresadas mediante un número y una unidad. Otras, en cambio, requieren
CÁLCULO VECTORIAL 1. ESCALARES Y VECTORES 1.1.-MAGNITUDES ESCALARES Y VECTORIALES Existen magnitudes físicas cuyas cantidades pueden ser expresadas mediante un número y una unidad. Otras, en cambio, requieren
MATEMÁTICAS para estudiantes de primer curso de facultades y escuelas técnicas
 Universidad de Cádiz Departamento de Matemáticas MATEMÁTICAS para estudiantes de primer curso de facultades y escuelas técnicas Tema 4 La recta en el plano Elaborado por la Profesora Doctora María Teresa
Universidad de Cádiz Departamento de Matemáticas MATEMÁTICAS para estudiantes de primer curso de facultades y escuelas técnicas Tema 4 La recta en el plano Elaborado por la Profesora Doctora María Teresa
TÉCNICAS GRÁFICAS FUNDAMENTALES.- EJERCICIOS PROPUESTOS
 TÉCNICAS GRÁFICAS FUNDAMENTALES.- EJERCICIOS PROPUESTOS Los siguientes ejercicios tienen el propósito de hacer que el estudiante use las construcciones geométricas fundamentales y además adquiera práctica
TÉCNICAS GRÁFICAS FUNDAMENTALES.- EJERCICIOS PROPUESTOS Los siguientes ejercicios tienen el propósito de hacer que el estudiante use las construcciones geométricas fundamentales y además adquiera práctica
Tema 7. MOTORES ELÉCTRICOS DE CORRIENTE CONTINUA
 Tema 7. MOTORES ELÉCTRICOS DE CORRIENTE CONTINUA 1. MAGNETISMO Y ELECTRICIDAD...2 Fuerza electromotriz inducida (Ley de inducción de Faraday)...2 Fuerza electromagnética (2ª Ley de Laplace)...2 2. LAS
Tema 7. MOTORES ELÉCTRICOS DE CORRIENTE CONTINUA 1. MAGNETISMO Y ELECTRICIDAD...2 Fuerza electromotriz inducida (Ley de inducción de Faraday)...2 Fuerza electromagnética (2ª Ley de Laplace)...2 2. LAS
CAJAS DE CAMBIOS. La caja de cambios está constituida por una serie de ruedas dentadas dispuestas en tres árboles.
 +Función y funcionamiento: CAJAS DE CAMBIOS En los vehículos, la caja de cambios o caja de velocidades (suele ser llamada sólo caja) es el elemento encargado de acoplar el motor y el sistema de transmisión
+Función y funcionamiento: CAJAS DE CAMBIOS En los vehículos, la caja de cambios o caja de velocidades (suele ser llamada sólo caja) es el elemento encargado de acoplar el motor y el sistema de transmisión
UNIVERSIDAD COMPLUTENSE DE MADRID
 TIEMPO: INSTRUCCIONES GENERALES Y VALORACIÓN 120 minutos. INSTRUCCIONES: La prueba consiste en la realización de cinco ejercicios, a elegir entre dos opciones, denominadas A y B. El alumno realizará una
TIEMPO: INSTRUCCIONES GENERALES Y VALORACIÓN 120 minutos. INSTRUCCIONES: La prueba consiste en la realización de cinco ejercicios, a elegir entre dos opciones, denominadas A y B. El alumno realizará una
_ Antología de Física I. Unidad II Vectores. Elaboró: Ing. Víctor H. Alcalá-Octaviano
 24 Unidad II Vectores 2.1 Magnitudes escalares y vectoriales Unidad II. VECTORES Para muchas magnitudes físicas basta con indicar su valor para que estén perfectamente definidas y estas son las denominadas
24 Unidad II Vectores 2.1 Magnitudes escalares y vectoriales Unidad II. VECTORES Para muchas magnitudes físicas basta con indicar su valor para que estén perfectamente definidas y estas son las denominadas
I.E.S. ANDRÉS DE VANDELVIRA DEPARTAMENTO DE TECNOLOGÍA SISTEMAS DE REPRESENTACIÓN GRÁFICA: PERSPECTIVA. J.Garrigós
 I.E.S. ANDRÉS DE VANDELVIRA DEPARTAMENTO DE TECNOLOGÍA J.Garrigós I.E.S. ANDRÉS DE VANDELVIRA DEPARTAMENTO DE TECNOLOGÍA 1 1.INTRODUCCIÓN Los sistemas de representación en perspectiva, tienen como objetivo
I.E.S. ANDRÉS DE VANDELVIRA DEPARTAMENTO DE TECNOLOGÍA J.Garrigós I.E.S. ANDRÉS DE VANDELVIRA DEPARTAMENTO DE TECNOLOGÍA 1 1.INTRODUCCIÓN Los sistemas de representación en perspectiva, tienen como objetivo
GEOMETRÍA. Septiembre 94. Determinar la ecuación del plano que pasa por el punto M (1,0, la recta x 1 y z
 GEOMETRÍA Junio 94. 1. Sin resolver el sistema, determina si la recta x 3y + 1 = 0 es exterior, secante ó tangente a la circunferencia (x 1) (y ) 1. Razónalo. [1,5 puntos]. Dadas las ecuaciones de los
GEOMETRÍA Junio 94. 1. Sin resolver el sistema, determina si la recta x 3y + 1 = 0 es exterior, secante ó tangente a la circunferencia (x 1) (y ) 1. Razónalo. [1,5 puntos]. Dadas las ecuaciones de los
TEMA VI: Cálculo de recipientes de pared delgada
 TEMA VI: Cálculo de recipientes de pared delgada 1. Introducción. Envolventes de pequeño espesor Podemos definir una envolvente como aquel sólido elástico en el que una de sus dimensiones es mucha menor
TEMA VI: Cálculo de recipientes de pared delgada 1. Introducción. Envolventes de pequeño espesor Podemos definir una envolvente como aquel sólido elástico en el que una de sus dimensiones es mucha menor
COORDENADAS CURVILINEAS
 CAPITULO V CALCULO II COORDENADAS CURVILINEAS Un sistema de coordenadas es un conjunto de valores que permiten definir unívocamente la posición de cualquier punto de un espacio geométrico respecto de un
CAPITULO V CALCULO II COORDENADAS CURVILINEAS Un sistema de coordenadas es un conjunto de valores que permiten definir unívocamente la posición de cualquier punto de un espacio geométrico respecto de un
Glosario del itinerario II
 Glosario del itinerario II Altura del punto de vista: (Véase Altura) Altura o altura del punto de vista: Distancia a la que se sitúa el punto de vista con respecto al suelo o plano geometral (véase). Arco
Glosario del itinerario II Altura del punto de vista: (Véase Altura) Altura o altura del punto de vista: Distancia a la que se sitúa el punto de vista con respecto al suelo o plano geometral (véase). Arco
GRUPO TECNOLOGÍA MECÁNICA PROCESOS DE FABRICACIÒN
 BROCHADORAS Generalidades y Tipos de superficies que generan Se llama brochado a la operación que consiste en arrancar lineal y progresivamente la viruta de una superficie de un cuerpo mediante una sucesión
BROCHADORAS Generalidades y Tipos de superficies que generan Se llama brochado a la operación que consiste en arrancar lineal y progresivamente la viruta de una superficie de un cuerpo mediante una sucesión
z2 z1 rt 1ª velocidad 38 11 3,455 2ª velocidad 44 21 2,095 3ª velocidad 43 31 1,387 4ª velocidad 40 39 1,026 5ª velocidad 39 48 0,813
 Caja de cambios manual actualizada El cambio que vamos a estudiar ahora es una versión extremadamente ligera, dotada de dos árboles y 5 velocidades. Los componentes de la carcasa están fabricados en magnesio.
Caja de cambios manual actualizada El cambio que vamos a estudiar ahora es una versión extremadamente ligera, dotada de dos árboles y 5 velocidades. Los componentes de la carcasa están fabricados en magnesio.
Cálculo de las Acciones Motoras en Mecánica Analítica
 Cálculo de las Acciones Motoras en Mecánica Analítica 1. Planteamiento general El diseño típico de la motorización de un sistema mecánico S es el que se muestra en la figura 1. Su posición viene definida
Cálculo de las Acciones Motoras en Mecánica Analítica 1. Planteamiento general El diseño típico de la motorización de un sistema mecánico S es el que se muestra en la figura 1. Su posición viene definida
PRÁCTICA - I DETERMINACION DE LOS ELEMENTOS CARDINALES DE UN SISTEMA ÓPTICO
 PRÁCTICA - I DETERMINACION DE LOS ELEMENTOS CARDINALES DE UN SISTEMA ÓPTICO 1- OBJETIVO Y FUNDAMENTO TEORICO A efectos de cálculo, el comportamiento paraxial de un sistema óptico puede resumirse en el
PRÁCTICA - I DETERMINACION DE LOS ELEMENTOS CARDINALES DE UN SISTEMA ÓPTICO 1- OBJETIVO Y FUNDAMENTO TEORICO A efectos de cálculo, el comportamiento paraxial de un sistema óptico puede resumirse en el
GEOMETRÍA CON LA CLASSPAD 300
 8. GEOMETRÍA CON LA CLASSPAD 300 LA APLICACIÓN GEOMETRÍA Para acceder a la aplicación para trabajar con distintas construcciones geométricas bastará con pulsar el icono correspondiente a Geometry en el
8. GEOMETRÍA CON LA CLASSPAD 300 LA APLICACIÓN GEOMETRÍA Para acceder a la aplicación para trabajar con distintas construcciones geométricas bastará con pulsar el icono correspondiente a Geometry en el
A RG. Giro de un punto A respecto del eje vertical, e. Giro de un punto A respecto del eje de punta, e.
 Giro de un punto A respecto del eje vertical, e. A''' A''' 2 e A'' 60 El giro es otro de los procedimietos utilizados en diédrico para resolver construcciones. Aquí vamos a ver solo uno de sus aspectos:
Giro de un punto A respecto del eje vertical, e. A''' A''' 2 e A'' 60 El giro es otro de los procedimietos utilizados en diédrico para resolver construcciones. Aquí vamos a ver solo uno de sus aspectos:
TEORÍA TEMA 9. 2. Definición de ESFUERZOS CARACTERÍSTICOS ( Mf.; Q; N)
") 1. Definición de Viga de alma llena TEORÍA TEMA 9 2. Definición de ESFUERZOS CARACTERÍSTICOS ( Mf.; Q; N) 3. Determinación de los esfuerzos característicos i. Concepto de Polígonos de Presiones ii. Caso
1. Definición de Viga de alma llena TEORÍA TEMA 9 2. Definición de ESFUERZOS CARACTERÍSTICOS ( Mf.; Q; N) 3. Determinación de los esfuerzos característicos i. Concepto de Polígonos de Presiones ii. Caso
GEOMETRÍA 1.- INTRODUCCIÓN:
 GEOMETRÍA 1.- INTRODUCCIÓN: Etimológicamente hablando, la palabra Geometría procede del griego y significa Medida de la Tierra. La Geometría es la parte de las Matemáticas que estudia las idealizaciones
GEOMETRÍA 1.- INTRODUCCIÓN: Etimológicamente hablando, la palabra Geometría procede del griego y significa Medida de la Tierra. La Geometría es la parte de las Matemáticas que estudia las idealizaciones
5.3 Esfuerzos y deformaciones producidos por flexión. Puente grúa. 5.3.1 Flexión pura
 5.3 Esfuerzos y deformaciones producidos por flexión Puente grúa 5.3.1 Flexión pura Para cierta disposición de cargas, algunos tramos de los elementos que las soportan están sometidos exclusivamente a
5.3 Esfuerzos y deformaciones producidos por flexión Puente grúa 5.3.1 Flexión pura Para cierta disposición de cargas, algunos tramos de los elementos que las soportan están sometidos exclusivamente a
Definición de vectores
 Definición de vectores Un vector es todo segmento de recta dirigido en el espacio. Cada vector posee unas características que son: Origen: O también denominado Punto de aplicación. Es el punto exacto sobre
Definición de vectores Un vector es todo segmento de recta dirigido en el espacio. Cada vector posee unas características que son: Origen: O también denominado Punto de aplicación. Es el punto exacto sobre
TEMA 2. HERRAMIENTAS DE GeoGebra
 TEMA 2. HERRAMIENTAS DE GeoGebra INTRODUCCIÓN Herramientas como Punto, Circunferencia, Segmento, Tangente, entre otras, se han utilizado en las actividades propuestas en el capítulo anterior, para realizar
TEMA 2. HERRAMIENTAS DE GeoGebra INTRODUCCIÓN Herramientas como Punto, Circunferencia, Segmento, Tangente, entre otras, se han utilizado en las actividades propuestas en el capítulo anterior, para realizar
k 11 N. de publicación: ES 2 031 411 k 21 Número de solicitud: 9002309 k 51 Int. Cl. 5 : B23F 21/12 k 73 Titular/es: Juan Luis Pena Cea
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA k 11 N. de publicación: ES 2 031 411 k 21 Número de solicitud: 9002309 k 51 Int. Cl. 5 : B23F 21/12 k 12 PATENTEDEINVENCION A6 k 22 Fecha de presentación:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA k 11 N. de publicación: ES 2 031 411 k 21 Número de solicitud: 9002309 k 51 Int. Cl. 5 : B23F 21/12 k 12 PATENTEDEINVENCION A6 k 22 Fecha de presentación:
Diseño y cálculos de engranes rectos, teórico, así como asistido por computadora. 1.2.1 Principios comunes a todos los tipos de engranes
 Tabla de contenidos Introducción Capítulo I: Tipos de engranes 1.1 Definición, Qué es un engrane? 1.2 Teoría fundamental de la mecánica de engranes 1.2.1 Principios comunes a todos los tipos de engranes
Tabla de contenidos Introducción Capítulo I: Tipos de engranes 1.1 Definición, Qué es un engrane? 1.2 Teoría fundamental de la mecánica de engranes 1.2.1 Principios comunes a todos los tipos de engranes
Tema 7.- MECANISMOS. Palanca. Transmisión lineal. Polipasto. Rueda de fricción. Engranaje
 Tema 7.- MECANISMOS Transmitir movimiento Transformar movimiento Dirigir movimiento Transmisión lineal Transmisión circular Circular a rectilíneo Circular a rectilíneo alternativo Trinquete Palanca Polea
Tema 7.- MECANISMOS Transmitir movimiento Transformar movimiento Dirigir movimiento Transmisión lineal Transmisión circular Circular a rectilíneo Circular a rectilíneo alternativo Trinquete Palanca Polea
Medios de Transmisión
 Medios de Transmisión Se denomina medio de transmisión al soporte físico mediante el cual el emisor y el receptor establecen la comunicación. Los medios de transmisión se clasifican en guiados y no guiados.
Medios de Transmisión Se denomina medio de transmisión al soporte físico mediante el cual el emisor y el receptor establecen la comunicación. Los medios de transmisión se clasifican en guiados y no guiados.
UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID. PRUEBAS DE ACCESO A ESTUDIOS UNIVERSITARIOS (LOGSE) Curso 2001-2002 OPCIÓN A
 Curso 2001-2002 OPCIÓN A") UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBAS DE ACCESO A ESTUDIOS UNIVERSITARIOS (LOGSE) Curso 2001-2002 MATERIA: DIBUJO TÉCNICO Junio Septiembre R1 R2 INSTRUCCIONES GENERALES La prueba consiste
UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBAS DE ACCESO A ESTUDIOS UNIVERSITARIOS (LOGSE) Curso 2001-2002 MATERIA: DIBUJO TÉCNICO Junio Septiembre R1 R2 INSTRUCCIONES GENERALES La prueba consiste
Medición de Roscas. Los elementos característicos de una rosca (ver figura 1) son:
 son:") Medición de Roscas Generalidades Las uniones roscadas, que comprenden un tornillo fileteado exteriormente que se vincula con una tuerca fileteada interiormente, son muy utilizadas en las construcciones
Medición de Roscas Generalidades Las uniones roscadas, que comprenden un tornillo fileteado exteriormente que se vincula con una tuerca fileteada interiormente, son muy utilizadas en las construcciones
Normalización. Roscas
 Normalización. Roscas Para que una pieza o un mecanismo industrial, por simple que sea, quede perfectamente montado, sujeto o funcione de manera adecuada, es necesaria la participación de los elementos
Normalización. Roscas Para que una pieza o un mecanismo industrial, por simple que sea, quede perfectamente montado, sujeto o funcione de manera adecuada, es necesaria la participación de los elementos
El proyecto Eratóstenes. Guía para el estudiante.
 El proyecto Eratóstenes. Guía para el estudiante. En esta actividad vas a trabajar en colaboración con estudiantes de otra escuela para medir el radio de la Tierra. Vas a usar los mismos métodos y principios
El proyecto Eratóstenes. Guía para el estudiante. En esta actividad vas a trabajar en colaboración con estudiantes de otra escuela para medir el radio de la Tierra. Vas a usar los mismos métodos y principios
- A3, Bl - B2 -B3, Cl - C2.
 UNVERSDADES PUBLCAS DE LA COMUNDAD DE MADRD PRUEBASDEACCESOA ESTUDOSUNVERSTAROS(LOGSE) Curso2007-2008 MATERA: DBUJO TÉCNCO 11 NSTRUCCONES GENERALES La prueba consiste en la realización de cinco ejercicios
UNVERSDADES PUBLCAS DE LA COMUNDAD DE MADRD PRUEBASDEACCESOA ESTUDOSUNVERSTAROS(LOGSE) Curso2007-2008 MATERA: DBUJO TÉCNCO 11 NSTRUCCONES GENERALES La prueba consiste en la realización de cinco ejercicios
CRITERIOS DE EVALUACIÓN Resolver problemas geométricos valorando el método y el razonamiento de las construcciones, su acabado y presentación.
 ASIGNATURA: DIBUJO TÉCNICO II Actualización: FEBRERO DE 2009 Validez desde el curso: 2009-2010 Autorización: COPAEU Castilla y León PROGRAMA Análisis del currículo y acuerdos para las Pruebas de Acceso
ASIGNATURA: DIBUJO TÉCNICO II Actualización: FEBRERO DE 2009 Validez desde el curso: 2009-2010 Autorización: COPAEU Castilla y León PROGRAMA Análisis del currículo y acuerdos para las Pruebas de Acceso
SUMA Y RESTA DE VECTORES
 SUMA Y RESTA DE VECTORES Definición de vectores Un vector es la expresión que proporciona la medida de cualquier magnitud vectorial. Un vector es todo segmento de recta dirigido en el espacio. Cada vector
SUMA Y RESTA DE VECTORES Definición de vectores Un vector es la expresión que proporciona la medida de cualquier magnitud vectorial. Un vector es todo segmento de recta dirigido en el espacio. Cada vector
SISTEMA DE PLANOS ACOTADOS APUNTES REALIZADOS POR ANTONIO CUESTA
 SISTEMA DE LANOS ACOTADOS AUNTES REALIZADOS OR ANTONIO CUESTA El sistema de lanos Acotados o Sistema Acotado constituye, al igual que el Sistema Diédrico, un sistema de representación reversible en el
SISTEMA DE LANOS ACOTADOS AUNTES REALIZADOS OR ANTONIO CUESTA El sistema de lanos Acotados o Sistema Acotado constituye, al igual que el Sistema Diédrico, un sistema de representación reversible en el
MECANIZADO DE METALES.
 MECANIZADO DE METALES. Uno de los procesos de conformación es el de arranque de viruta. En contraste con otros métodos, en los procesos de conformación con arranque de viruta hay una gran pérdida de material
MECANIZADO DE METALES. Uno de los procesos de conformación es el de arranque de viruta. En contraste con otros métodos, en los procesos de conformación con arranque de viruta hay una gran pérdida de material
Examen de TEORIA DE MAQUINAS Junio 94 Nombre...
 Examen de TEORIA DE MAQUINAS Junio 94 Nombre... El robot plano de la figura transporta en su extremo una masa puntual de magnitud 5M a velocidad constante horizontal de valor v. Cada brazo del robot tiene
Examen de TEORIA DE MAQUINAS Junio 94 Nombre... El robot plano de la figura transporta en su extremo una masa puntual de magnitud 5M a velocidad constante horizontal de valor v. Cada brazo del robot tiene
CRITERIOS DE VALORACIÓN
 PRUEBAS DE ACCESO A LA UNIVERSIDAD PARA ALUMNOS DE BACHILLERATO LOE Junio 2010 DIBUJO TÉCNICO II. CÓDIGO Ejercicio nº 1 CRITERIOS DE VALORACIÓN OPCIÓN A 1. Construcción del heptágono conocido el lado...
PRUEBAS DE ACCESO A LA UNIVERSIDAD PARA ALUMNOS DE BACHILLERATO LOE Junio 2010 DIBUJO TÉCNICO II. CÓDIGO Ejercicio nº 1 CRITERIOS DE VALORACIÓN OPCIÓN A 1. Construcción del heptágono conocido el lado...
A.2. Notación y representación gráfica de vectores. Tipos de vectores.
 Apéndice A: Vectores A.1. Magnitudes escalares y vectoriales Las magnitudes escalares son aquellas magnitudes físicas que quedan completamente definidas por un módulo (valor numérico) y la unidad de medida
Apéndice A: Vectores A.1. Magnitudes escalares y vectoriales Las magnitudes escalares son aquellas magnitudes físicas que quedan completamente definidas por un módulo (valor numérico) y la unidad de medida
MECANISMOS Toni Saura IES Salvador Gadea - Aldaia
 MECANISMOS Toni Saura IES Salvador Gadea - Aldaia Contenidos Definiciones Mecanismos transmisión lineal Mecanismos transmisión circular Mecanismos transformación Otros mecanismos Índice 1. Definiciones:
MECANISMOS Toni Saura IES Salvador Gadea - Aldaia Contenidos Definiciones Mecanismos transmisión lineal Mecanismos transmisión circular Mecanismos transformación Otros mecanismos Índice 1. Definiciones:
MECANICA CLASICA Segundo cuatrimestre de 2007. Cinemática y dinámica del cuerpo rígido, ángulos de Euler, Ecuaciones de Euler.
 MECANICA CLASICA Segundo cuatrimestre de 2007. Cinemática y dinámica del cuerpo rígido, ángulos de Euler, Ecuaciones de Euler. Problema 1: Analizar los siguientes puntos. a) Mostrar que la velocidad angular
MECANICA CLASICA Segundo cuatrimestre de 2007. Cinemática y dinámica del cuerpo rígido, ángulos de Euler, Ecuaciones de Euler. Problema 1: Analizar los siguientes puntos. a) Mostrar que la velocidad angular
Capítulo 1 Introducción y análisis de sistemas CNC
 Capítulo 1 Introducción y análisis de sistemas CNC INTRODUCCIÓN La evolución del control numérico ha producido la introducción del mismo en grandes, medianas, familiares y pequeñas empresas, lo que ha
Capítulo 1 Introducción y análisis de sistemas CNC INTRODUCCIÓN La evolución del control numérico ha producido la introducción del mismo en grandes, medianas, familiares y pequeñas empresas, lo que ha
Electrotecnia General Tema 8 TEMA 8 CAMPO MAGNÉTICO CREADO POR UNA CORRIENTE O UNA CARGA MÓVIL
 TEMA 8 CAMPO MAGNÉTICO CREADO POR UNA CORRIENTE O UNA CARGA MÓVIL 8.1. CAMPO MAGNÉTICO CREADO POR UN ELEMENTO DE CORRIENTE Una carga eléctrica en movimiento crea, en el espacio que la rodea, un campo magnético.
TEMA 8 CAMPO MAGNÉTICO CREADO POR UNA CORRIENTE O UNA CARGA MÓVIL 8.1. CAMPO MAGNÉTICO CREADO POR UN ELEMENTO DE CORRIENTE Una carga eléctrica en movimiento crea, en el espacio que la rodea, un campo magnético.
Los eslabones tambien se pueden clasificar de acuerdo a si empujan o jalan a otro eslabon:
 Los eslabones tambien se pueden clasificar de acuerdo a si empujan o jalan a otro eslabon: TIPO DE ESLABON DESCRIPCION EJEMPLO Rigidos: Son aquellos que empujan y/o jalan a otro. Tuercas, tornillos, flechas,
Los eslabones tambien se pueden clasificar de acuerdo a si empujan o jalan a otro eslabon: TIPO DE ESLABON DESCRIPCION EJEMPLO Rigidos: Son aquellos que empujan y/o jalan a otro. Tuercas, tornillos, flechas,
Clase de apoyo de matemáticas Ángulos Escuela 765 Lago Puelo Provincia de Chubut
 Clase de apoyo de matemáticas Ángulos Escuela 765 Lago Puelo Provincia de Chubut Este texto intenta ser un complemento de las clases de apoyo de matemáticas que se están realizando en la escuela 765 de
Clase de apoyo de matemáticas Ángulos Escuela 765 Lago Puelo Provincia de Chubut Este texto intenta ser un complemento de las clases de apoyo de matemáticas que se están realizando en la escuela 765 de
CONSTRUCCIÓN GEOMÉTRICA DE CUBIERTAS. Geometrical roof construction
 JOSÉ ANTONIO GONZÁLEZ CASARES CONSTRUCCIÓN GEOMÉTRICA DE CUBIERTAS Geometrical roof construction INTRODUCCIÓN La resolución de cubiertas (fundamentalmente inclinadas) no debería de plantear mayor dificultad
JOSÉ ANTONIO GONZÁLEZ CASARES CONSTRUCCIÓN GEOMÉTRICA DE CUBIERTAS Geometrical roof construction INTRODUCCIÓN La resolución de cubiertas (fundamentalmente inclinadas) no debería de plantear mayor dificultad
SOLUCIONES. Matemáticas 3 EDUCACIÓN SECUNDARIA 1 3 1 1 3, 4 2,3 + : a) Expresamos N = 2,3 en forma de fracción: 10 N = 23,333 N = 2,333 21 7 = + = =
 Expresamos N = 2,3 en forma de fracción: 10 N = 23,333 N = 2,333 21 7 = + = =") Matemáticas EDUCACIÓN SECUNDARIA Opción A SOLUCIONES Evaluación: Fecha: Ejercicio nº 1.- a) Opera y simplifica: 1 1 1, 4, + : 5 b) Reduce a una sola potencia: 4 1 5 5 0 a) Expresamos N =, en forma de fracción:
Matemáticas EDUCACIÓN SECUNDARIA Opción A SOLUCIONES Evaluación: Fecha: Ejercicio nº 1.- a) Opera y simplifica: 1 1 1, 4, + : 5 b) Reduce a una sola potencia: 4 1 5 5 0 a) Expresamos N =, en forma de fracción:
PROBLEMAS MÉTRICOS. Página 183 REFLEXIONA Y RESUELVE. Diagonal de un ortoedro. Distancia entre dos puntos. Distancia de un punto a una recta
 PROBLEMAS MÉTRICOS Página 3 REFLEXIONA Y RESUELVE Diagonal de un ortoedro Halla la diagonal de los ortoedros cuyas dimensiones son las siguientes: I) a =, b =, c = II) a = 4, b =, c = 3 III) a =, b = 4,
PROBLEMAS MÉTRICOS Página 3 REFLEXIONA Y RESUELVE Diagonal de un ortoedro Halla la diagonal de los ortoedros cuyas dimensiones son las siguientes: I) a =, b =, c = II) a = 4, b =, c = 3 III) a =, b = 4,
Bloque II: Principios de máquinas
 Bloque II: Principios de máquinas 1. Conceptos Fundamentales A. Trabajo En términos de la física y suponiendo un movimiento rectilíneo de un objeto al que se le aplica una fuerza F, se define como el producto
Bloque II: Principios de máquinas 1. Conceptos Fundamentales A. Trabajo En términos de la física y suponiendo un movimiento rectilíneo de un objeto al que se le aplica una fuerza F, se define como el producto
Análisis de propuestas de evaluación en las aulas de América Latina
 Este trabajo de evaluación tiene como objetivo la caracterización de figuras del espacio. Para ello el alumno debe establecer la correspondencia entre la representación de la figura y algunas de sus propiedades.
Este trabajo de evaluación tiene como objetivo la caracterización de figuras del espacio. Para ello el alumno debe establecer la correspondencia entre la representación de la figura y algunas de sus propiedades.
La actividad se centrará en dibujar alguna de estas curvas con instrumentos. efecto durante dos clases.
 CURVAS TÉCNICAS Curvas cíclicas. Cicloide. Epicicloide. Hipocicloide. Pericicloide. Envolvente de la circunferencia TEMA. Objetivos y orientaciones metodológicas Para el estudio de estas curvas se hará
CURVAS TÉCNICAS Curvas cíclicas. Cicloide. Epicicloide. Hipocicloide. Pericicloide. Envolvente de la circunferencia TEMA. Objetivos y orientaciones metodológicas Para el estudio de estas curvas se hará
UNIDAD 6 Fotogrametría
 UNIDAD 6 Fotogrametría La fotogrametría es la técnica de obtener mediciones reales de un objeto por medio de la fotografía, tanto aérea como terrestre Las fotografías se las realiza con una cámara métrica
UNIDAD 6 Fotogrametría La fotogrametría es la técnica de obtener mediciones reales de un objeto por medio de la fotografía, tanto aérea como terrestre Las fotografías se las realiza con una cámara métrica
DESCRIPTIVA DE LA PRÁCTICA PROCESO DE FABRICACIÓN MEDIANTE ARRAQNUE DE VIRUTA. TORNO. Parte I. Federico Padrón Martín. Servando R.
 DESCRIPTIVA DE LA PRÁCTICA PROCESO DE FABRICACIÓN MEDIANTE ARRAQNUE DE VIRUTA. TORNO Parte I Federico Padrón Martín Servando R. Luis León Asignatura: Tecnología Mecánica y Procesos de Fabricación 3º de
DESCRIPTIVA DE LA PRÁCTICA PROCESO DE FABRICACIÓN MEDIANTE ARRAQNUE DE VIRUTA. TORNO Parte I Federico Padrón Martín Servando R. Luis León Asignatura: Tecnología Mecánica y Procesos de Fabricación 3º de
GEOMETRÍA DESCRIPTIVA SISTEMAS DE PROYECCIÓN
 GEOMETRÍA DESCRIPTIVA La Geometría Descriptiva es la ciencia de representación gráfica, sobre superficies bidimensionales, de los problemas del espacio donde intervengan, puntos, líneas y planos. La Geometría
GEOMETRÍA DESCRIPTIVA La Geometría Descriptiva es la ciencia de representación gráfica, sobre superficies bidimensionales, de los problemas del espacio donde intervengan, puntos, líneas y planos. La Geometría
DEFECTOS EN PIEZAS MECÁNICAS
 DEFECTOS EN PIEZAS MECÁNICAS Defectos dimensionales: diferencia entre las dimensiones obtenidas midiendo la pieza y las teóricas dadas por el diseño o pieza prototipo. Pueden ser de tipo lineal o angular.
DEFECTOS EN PIEZAS MECÁNICAS Defectos dimensionales: diferencia entre las dimensiones obtenidas midiendo la pieza y las teóricas dadas por el diseño o pieza prototipo. Pueden ser de tipo lineal o angular.
1. Vectores 1.1. Definición de un vector en R2, R3 (Interpretación geométrica), y su generalización en Rn.
, y su generalización en Rn.") 1. VECTORES INDICE 1.1. Definición de un vector en R 2, R 3 (Interpretación geométrica), y su generalización en R n...2 1.2. Operaciones con vectores y sus propiedades...6 1.3. Producto escalar y vectorial
1. VECTORES INDICE 1.1. Definición de un vector en R 2, R 3 (Interpretación geométrica), y su generalización en R n...2 1.2. Operaciones con vectores y sus propiedades...6 1.3. Producto escalar y vectorial
EL ORDENADOR RECURSO TIC PARA UNA METODOLOGÍA TRANSVERSAL E INTERDISCIPLINAR: MATEMÁTICAS - TECNOLOGÍA
 EL ORDENADOR RECURSO TIC PARA UNA METODOLOGÍA TRANSVERSAL E INTERDISCIPLINAR: MATEMÁTICAS - TECNOLOGÍA Resumen AUTORIA MARÍA JOSÉ ALFONSO GARCÍA TEMÁTICA INTERDISCIPLINARIEDAD MATEMÁTICAS Y TECNOLOGÍA
EL ORDENADOR RECURSO TIC PARA UNA METODOLOGÍA TRANSVERSAL E INTERDISCIPLINAR: MATEMÁTICAS - TECNOLOGÍA Resumen AUTORIA MARÍA JOSÉ ALFONSO GARCÍA TEMÁTICA INTERDISCIPLINARIEDAD MATEMÁTICAS Y TECNOLOGÍA
OPTIMIZACIÓN DEL AISLAMIENTO ACÚSTICO A RUIDO AÉREO EN SISTEMAS DE DOBLE PARED DE YESO LAMINADO Y LANA DE ROCA.
 OPTIMIZACIÓN DEL AISLAMIENTO ACÚSTICO A RUIDO AÉREO EN SISTEMAS DE DOBLE PARED DE YESO LAMINADO Y LANA DE ROCA. José Carlos Aguilar ROCKWOOL PENINSULAR S.A. C/Bruc, nº 50-3ª, 08010 Barcelona; tel: 93.318.9028;
OPTIMIZACIÓN DEL AISLAMIENTO ACÚSTICO A RUIDO AÉREO EN SISTEMAS DE DOBLE PARED DE YESO LAMINADO Y LANA DE ROCA. José Carlos Aguilar ROCKWOOL PENINSULAR S.A. C/Bruc, nº 50-3ª, 08010 Barcelona; tel: 93.318.9028;
SOLUCIONES CIRCUNFERENCIA. 1. Ecuación de la circunferencia cuyo centro es el punto (1, 2) y que pasa por el punto (2,3).
 y que pasa por el punto (2,3).") SOLUCIONES CIRCUNFERENCIA 1. Ecuación de la circunferencia cuyo centro es el punto (1,) y que pasa por el punto (,). Para determinar la ecuación de la circunferencia es necesario conocer el centro y el
SOLUCIONES CIRCUNFERENCIA 1. Ecuación de la circunferencia cuyo centro es el punto (1,) y que pasa por el punto (,). Para determinar la ecuación de la circunferencia es necesario conocer el centro y el
TEORÍA DE MECANISMOS 5.- TEORÍA GENERAL DE ENGRANAJES
 TEORÍA DE MECANISMOS 5.- TEORÍA GENERAL DE ENGRANAJES Transmisiones Mecánicas Objetivo: Comunicar el movimiento de un órgano a otro Se emplean cuando es necesario un cambio en la velocidad o en el par
TEORÍA DE MECANISMOS 5.- TEORÍA GENERAL DE ENGRANAJES Transmisiones Mecánicas Objetivo: Comunicar el movimiento de un órgano a otro Se emplean cuando es necesario un cambio en la velocidad o en el par
TIPOS DE RESTRICCIONES
 RESTRICCIONES: Las restricciones son reglas que determinan la posición relativa de las distintas geometrías existentes en el archivo de trabajo. Para poder aplicarlas con rigor es preciso entender el grado
RESTRICCIONES: Las restricciones son reglas que determinan la posición relativa de las distintas geometrías existentes en el archivo de trabajo. Para poder aplicarlas con rigor es preciso entender el grado
VECTORES. Módulo, dirección y sentido de un vector fijo En un vector fijo se llama módulo del mismo a la longitud del segmento que lo define.
 VECTORES El estudio de los vectores es uno de tantos conocimientos de las matemáticas que provienen de la física. En esta ciencia se distingue entre magnitudes escalares y magnitudes vectoriales. Se llaman
VECTORES El estudio de los vectores es uno de tantos conocimientos de las matemáticas que provienen de la física. En esta ciencia se distingue entre magnitudes escalares y magnitudes vectoriales. Se llaman
Escuela Técnica Superior de Ingeniería Universidad de Sevilla. GradoenIngenieríadelas Tecnologías de Telecomunicación EJERCICIOS DE MATEMÁTICAS II
 Escuela Técnica Superior de Ingeniería Universidad de Sevilla GradoenIngenieríadelas Tecnologías de Telecomunicación EJERCICIOS DE MATEMÁTICAS II CURSO 2015-2016 Índice general 1. Derivación de funciones
Escuela Técnica Superior de Ingeniería Universidad de Sevilla GradoenIngenieríadelas Tecnologías de Telecomunicación EJERCICIOS DE MATEMÁTICAS II CURSO 2015-2016 Índice general 1. Derivación de funciones