Examen de MECANISMOS Junio 97 Nombre...
|
|
|
- María del Pilar Martín Quiroga
- hace 7 años
- Vistas:
Transcripción
1 Examen de MECANISMOS Junio 97 Nombre... Se pretende conectar dos ejes paralelos que distan 505 mm mediante dos engranajes, de manera que la relación de velocidades sea El número máximo de dientes admisible en cada rueda es 250. Determinar: a) Módulo y número de dientes de los engranajes. b) Valor de las correcciones, si se precisan. c) Existencia o no de apuntamiento en la rueda más grande. Nota: el módulo debe ser normalizado de la serie I:
 Módulo y número de dientes de los engranajes. b) Valor de las correcciones, si se precisan.")
2

3

4

5 Examen de TEORIA DE MAQUINAS Junio 97 Nombre... En el tren de engranajes de la figura: 1) Calcular el número de dientes de la rueda 4. 2) Determinar la relación de velocidades ωs/ωe. 3) Si se sustituye la rueda 8 por otra de 46 dientes sin modificar la distancia entre ejes, indicar las correcciones a realizar en las ruedas para que el tren de engranajes pueda funcionar. Todas las ruedas tienen el mismo módulo y sus números de dientes son: z 1 = 50, z 2 = 25, z 3 = 45, z 5 = 25, z 6 = 40, z 7 = 18, z 8 = e s 2 3 4

6

7

8 Examen de TEORIA DE MAQUINAS Septiembre 98 Nombre... En el tren de engranajes de la figura se conocen los números de dientes de las ruedas: z A =20, z B =20, z C =30, z D =21, z E =25, z H =18, z I =16, z J =18. a) Calcular la relación de velocidades salida/entrada. b) Si, por razones cinemáticas, la rueda G se sustituye por otra de 25 dientes, determinar las correcciones que han de efectuarse para que el tren de engranajes funcione correctamente. D E B C F G e A H I s J K
 Si, por razones cinemáticas, la rueda G se sustituye por otra de 25 dientes, determinar las correcciones que han de")
9

10

11

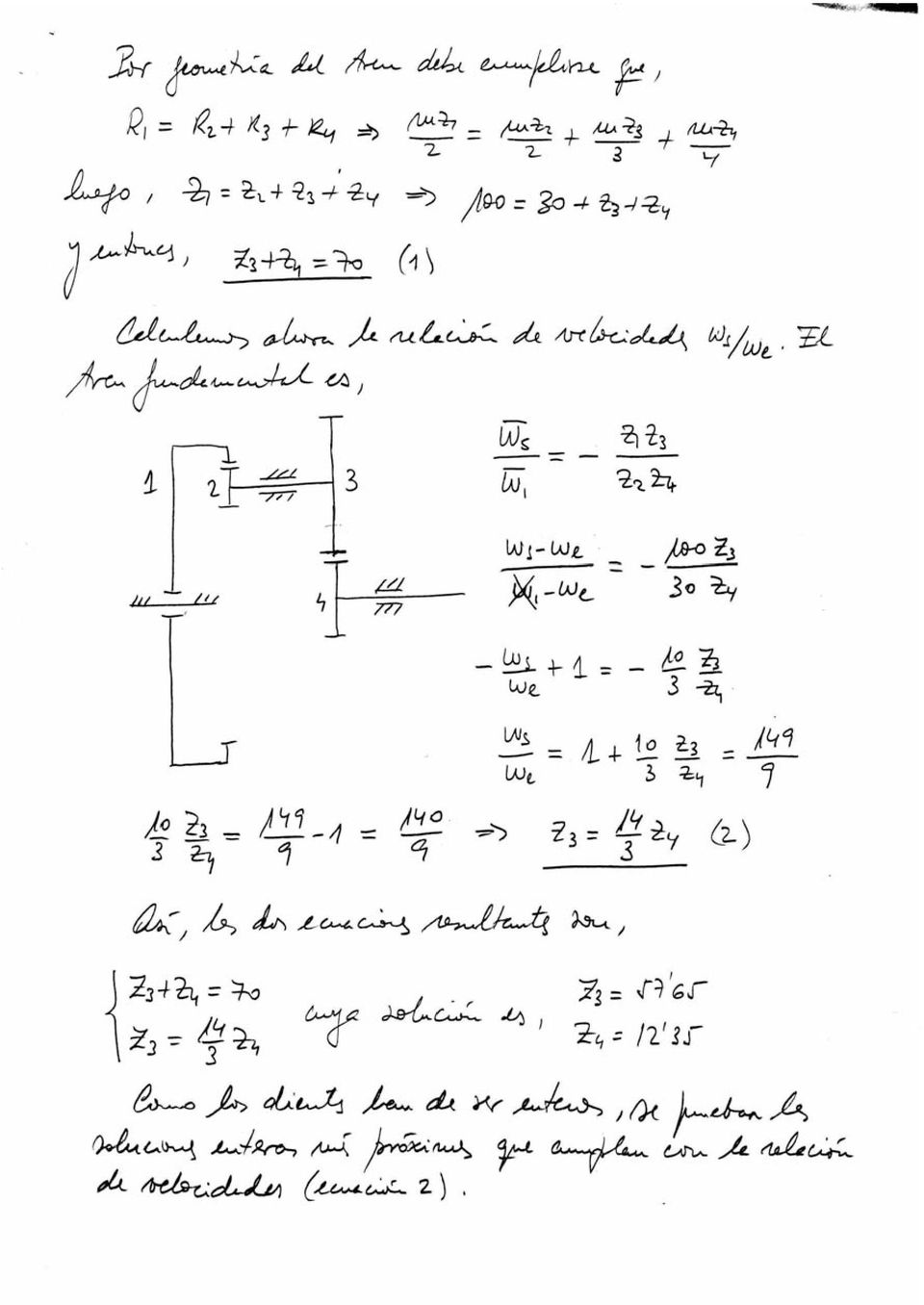
12 Examen de TEORIA DE MAQUINAS Septiembre 99 Nombre... En el tren epicicloidal de engranajes de la figura todas las ruedas tienen módulo igual de valor 2 mm. Sabiendo que los números de dientes de las ruedas 1 y 2 son, respectivamente, 100 y 30, y que la relación de velocidades entrada/salida es de 9/149, definir las ruedas 3 y e 4 s

13
14

15 Examen de TEORIA DE MAQUINAS Junio 00 Nombre... En el tren de engranajes de la figura todas las ruedas son normales y tienen el mismo módulo m. Los números de dientes son: z 1 =20, z 3 =40, z 4 =60, z 6 = entrada 6 1 salida Determinar: a) Relación entre la velocidad angular de salida y la de entrada. b) Si m=4, hallar el espesor de diente de la rueda 2 en su circunferencia exterior.
 Relación entre la velocidad angular de salida y la")
16

17 Examen de TEORIA DE MAQUINAS Septiembre 00 Nombre... La figura muestra un embrague planetario. El tope inferior puede estar conectado (arriba) o desconectado (abajo). Cuando se halla conectado, el tren de engranajes resultante es epicicloidal, mientras que, si se encuentra desconectado, resulta un tren ordinario simple, pues el disco 4 se bloquea. Todas las ruedas son normales y del mismo módulo. Los números de dientes son: z 1 =24, z 3 = Tope Si el engranaje de entrada 1 gira en el sentido indicado en la figura con velocidad de 300 rpm, determinar: c) Número de dientes de las ruedas 2. d) Velocidad de la rueda con dentado interior 3 cuando el tope está desconectado. e) Velocidad del disco 4 cuando el tope está conectado.
 Número de dientes de las ruedas 2.")
18

19 Examen de TEORIA DE MAQUINAS Junio 01 Nombre... En el tren de engranajes epicicloidal de la figura, los números de dientes de los engranajes son: z 1 =101, z 2 =100, z 3 =99, z 4 =100, z 5 =101, z 6 =100, z 7 =99, z 8 =100. a) Si el eje de entrada gira a 60 rpm, cuánto tiempo tardará en dar una vuelta completa el eje de salida? b) Qué módulo mínimo ha de tener la rueda 8 para que su espesor de diente en la circunferencia exterior sea al menos de 2 mm?
 Si el eje de entrada gira a 60 rpm, cuánto tiempo tardará en dar una vuelta completa el eje de salida?")
20

21
22 Examen de TEORIA DE MAQUINAS Septiembre 01 Nombre... Se precisa conectar los dos ejes que muestra la figura, para obtener una relación ωs 11 de velocidades =, positiva, de manera que ambos ejes giren en el mismo ωe 23 sentido. La dificultad estriba en la existencia del obstáculo que indica la figura. Para resolver el problema, se propone utilizar un tren de engranajes ordinario simple, formado por tres engranajes: uno con centro en el eje de entrada, otro con centro en el eje de salida, y otro intermedio entre los dos anteriores. De esta forma, se consigue la relación de velocidades positiva entre la entrada y la salida, y además se puede salvar el obstáculo. Si los módulos normalizados disponibles son 1, 1.25, 1.5, 2, 2.5 y 3, definir perfectamente las tres ruedas a emplear, así como la ubicación del eje de la rueda intermedia. Todas las distancias se encuentran en mm.
23
24
25
26 Examen de TEORIA DE MAQUINAS Diciembre 01 Nombre... Determinar el número de dientes del engranaje con dentado interior E en el mecanismo elevador de la figura, sabiendo que la reducción de velocidad que se produce entre la entrada y la salida es: ω B = 25. Se conocen los números de ω A dientes de los demás engranajes, z B =20, z C =80, z D =30. Calcular también la ventaja mecánica del mecanismo, W/F, suponiendo que no existen pérdidas por rozamiento en los contactos entre ruedas dentadas.
27
28 Examen de TEORIA DE MAQUINAS Septiembre 02 Nombre... La figura muestra el mecanismo desarrollado por Bendix Corporation para ser utilizado como muñeca de la mano de un robot. Para simplificar, se ha omitido la parte correspondiente a uno de los giros, y se ha conservado el tren de engranajes diferencial que permite realizar los otros dos. Las entradas de dicho tren son las velocidades angulares de 1 y 2, mientras que la salida es la velocidad angular de la mano 6, que tendrá una componente según el eje x (móvil), y otra según el eje y (fijo). Todos los ángulos de los conos son de 45º. a) Indicar qué relaciones han de cumplir los números de dientes de los engranajes del mecanismo, sabiendo que todos son normales o tallados a cero. b) Obtener las componentes de la velocidad angular de la mano, ω 6x y ω 6y, en función de las velocidades angulares de los elementos de entrada, ω 1 y ω 2, tomando siempre como sentidos positivos los correspondientes a los ejes x e y.
29
30
Examen de MECANISMOS Junio 94 Nombre...
 Examen de MECANISMOS Junio 94 Nombre... Sean dos ruedas talladas a cero con una cremallera de módulo m=4 mm, ángulo de presión 20 o, addendum igual al módulo y dedendum igual también al módulo. Los números
Examen de MECANISMOS Junio 94 Nombre... Sean dos ruedas talladas a cero con una cremallera de módulo m=4 mm, ángulo de presión 20 o, addendum igual al módulo y dedendum igual también al módulo. Los números
Examen de TEORIA DE MAQUINAS Diciembre 02 Nombre... La figura muestra un tren de engranajes epicicloidal. Rellenar los huecos de la tabla adjunta.
 Examen de TEORIA DE MAQUINAS Diciembre 02 Nombre... La figura muestra un tren de engranajes epicicloidal. Rellenar los huecos de la tabla adjunta. Brazo Caso z 2 z 3 z 4 z 5 z 6 2 6 Brazo 1 30 25 45 50
Examen de TEORIA DE MAQUINAS Diciembre 02 Nombre... La figura muestra un tren de engranajes epicicloidal. Rellenar los huecos de la tabla adjunta. Brazo Caso z 2 z 3 z 4 z 5 z 6 2 6 Brazo 1 30 25 45 50
CIDEAD. TECNOLOGÍA INDUSTRIAL I. MECANISMOS. PROBLEMAS 1.
 1. Hallar la fuerza que es necesario aplicar para vencer una resistencia de 1000 Kg., utilizando: a. Una polea móvil. b. Un polipasto potencial de tres poleas móviles. c. Un polipasto exponencial de tres
1. Hallar la fuerza que es necesario aplicar para vencer una resistencia de 1000 Kg., utilizando: a. Una polea móvil. b. Un polipasto potencial de tres poleas móviles. c. Un polipasto exponencial de tres
ACTIVIDADES DE MECANISMOS
 ACTIVIDADES DE MECANISMOS 1. Calcular la velocidad de giro de una polea de 40mm de diámetro si el arrastrada por otra de 120mm de diámetro, que gira a 300 rpm. Calcula también la relación de transmisión
ACTIVIDADES DE MECANISMOS 1. Calcular la velocidad de giro de una polea de 40mm de diámetro si el arrastrada por otra de 120mm de diámetro, que gira a 300 rpm. Calcula también la relación de transmisión
b) Representación en planta del sistema. c) Calcula la velocidad de giro de la rueda conducida. d) Calcula la relación de transmisión.
 Representación en planta del sistema. c) Calcula la velocidad de giro de la rueda conducida. d) Calcula la relación de transmisión.") TRANSMISIÓN SIMPLE. 27. Dados los siguientes datos realiza el dibujo y calcula la velocidad de giro de la rueda 2 sabiendo: d 1 = 30 cm, n 1 = 500 rpm, d 2 = 600 mm 28. Se quiere construir un mecanismo
TRANSMISIÓN SIMPLE. 27. Dados los siguientes datos realiza el dibujo y calcula la velocidad de giro de la rueda 2 sabiendo: d 1 = 30 cm, n 1 = 500 rpm, d 2 = 600 mm 28. Se quiere construir un mecanismo
Examen de TECNOLOGIA DE MAQUINAS Septiembre 97 Nombre...
 Examen de TECNOLOGIA DE MAQUINAS Septiembre 97 Nombre... El eje de la figura recibe la potencia procedente del motor a través del engranaje cilíndrico recto que lleva montado, y se acopla a la carga por
Examen de TECNOLOGIA DE MAQUINAS Septiembre 97 Nombre... El eje de la figura recibe la potencia procedente del motor a través del engranaje cilíndrico recto que lleva montado, y se acopla a la carga por
3º ESO TECNOLOGIAS MECANISMOS
 3º ESO TECNOLOGIAS MECANISMOS TEORIA DE MECANISMOS SIMPLES CON PALANCAS... 1 EJERCICIOS DE PALANCAS...3 TEORIA DE MECANISMOS DE TRANSMISIÓN LINEAL...6 TEORIA DE MECANISMOS DE TRANSMISIÓN CIRCULAR...6 TEORIA
3º ESO TECNOLOGIAS MECANISMOS TEORIA DE MECANISMOS SIMPLES CON PALANCAS... 1 EJERCICIOS DE PALANCAS...3 TEORIA DE MECANISMOS DE TRANSMISIÓN LINEAL...6 TEORIA DE MECANISMOS DE TRANSMISIÓN CIRCULAR...6 TEORIA
4. TRANSMISIÓN DE MOVIMIENTO
 Departamento Tecnología I.E.S. Drago Cádiz PÁG. 1 # ACTIVIDADES 1.- Indica cuáles de las siguientes máquinas son simples y cuáles compuestas: Abrelatas Pinzas Reloj de pared Abrebotellas Batidora Tornillo
Departamento Tecnología I.E.S. Drago Cádiz PÁG. 1 # ACTIVIDADES 1.- Indica cuáles de las siguientes máquinas son simples y cuáles compuestas: Abrelatas Pinzas Reloj de pared Abrebotellas Batidora Tornillo
PROBLEMAS DE ELASTICIDAD Y RESISTENCIA DE MATERIALES GRUPO 4 CURSO 1999-2000
 PROBLEMAS DE ELASTICIDAD Y RESISTENCIA DE MATERIALES GRUPO 4 CURSO 1999-2000 10.1.- Qué longitud debe tener un redondo de hierro (G = 80.000 MPa), de 1 cm de diámetro para que pueda sufrir un ángulo de
PROBLEMAS DE ELASTICIDAD Y RESISTENCIA DE MATERIALES GRUPO 4 CURSO 1999-2000 10.1.- Qué longitud debe tener un redondo de hierro (G = 80.000 MPa), de 1 cm de diámetro para que pueda sufrir un ángulo de
Examen de TEORIA DE MAQUINAS Diciembre 99 Nombre...
 Examen de TEORIA DE MAQUINAS Diciembre 99 Nombre... La figura muestra una leva de disco con seguidor de traslación, radial, de rodillo. La leva es un círculo de radio R=20 mm, articulado al elemento fijo
Examen de TEORIA DE MAQUINAS Diciembre 99 Nombre... La figura muestra una leva de disco con seguidor de traslación, radial, de rodillo. La leva es un círculo de radio R=20 mm, articulado al elemento fijo
1.- INTRODUCCIÓN. Un tren de engranajes epicicloidal se diferencia de uno normal en que uno de los engranajes rueda en torno a la periferia del otro.
 1.- INTRODUCCIÓN. Existen muchas formas de tallar engranajes. Durante la realización de esta práctica se verán algunas de ellas, así como la influencia del desplazamiento en la forma y propiedades de los
1.- INTRODUCCIÓN. Existen muchas formas de tallar engranajes. Durante la realización de esta práctica se verán algunas de ellas, así como la influencia del desplazamiento en la forma y propiedades de los
1. El eje de un motor gira a 500rpm. a que velocidad angular equivale en rad/s?
 1. El eje de un motor gira a 500rpm. a que velocidad angular equivale en rad/s? 2. Determina la relación de transmisión entre dos árboles y la velocidad del segundo si están unidos mediante una transmisión
1. El eje de un motor gira a 500rpm. a que velocidad angular equivale en rad/s? 2. Determina la relación de transmisión entre dos árboles y la velocidad del segundo si están unidos mediante una transmisión
1) Nombre del mecanismo: Ruedas de fricción, transmisión por correa, engranajes y transmisión por cadena.
 Nombre del mecanismo: Ruedas de fricción, transmisión por correa, engranajes y transmisión por cadena.") Ficha nº:3 Transmisión circular. 1) Nombre del mecanismo: Ruedas de fricción, transmisión por correa, engranajes y transmisión por cadena. 2) Descripción: Ruedas de fricción: Son sistemas formados por
Ficha nº:3 Transmisión circular. 1) Nombre del mecanismo: Ruedas de fricción, transmisión por correa, engranajes y transmisión por cadena. 2) Descripción: Ruedas de fricción: Son sistemas formados por
MECANISMOS DE TRANSMISION SIMPLE
 MECANISMOS DE TRANSMISION SIMPLE 17. Indica hacia donde gira cada polea con un flecha. En cada caso, Cuál gira más deprisa? 18. Indica el sentido de giro de cada una de las poleas siguientes: 19. En el
MECANISMOS DE TRANSMISION SIMPLE 17. Indica hacia donde gira cada polea con un flecha. En cada caso, Cuál gira más deprisa? 18. Indica el sentido de giro de cada una de las poleas siguientes: 19. En el
Ejercicios de Transmisión por Correa
 Ejercicios de Transmisión por Correa 1. En un sistema de transmisión por correa la polea motriz tiene un diámetro de 10 mm y la conducida de 40 mm. Si la velocidad angular del eje motriz es de 100 rpm
Ejercicios de Transmisión por Correa 1. En un sistema de transmisión por correa la polea motriz tiene un diámetro de 10 mm y la conducida de 40 mm. Si la velocidad angular del eje motriz es de 100 rpm
Eje de. salida. Eje de. entrada
 PRBLEMA 1 La cinta elevadora de la figura 1, de una fábrica de macetas, transporta las mismas desde un alimentador a la zona de embalajes, de forma que la cinta lleva una sola maceta cada vez y que cuando
PRBLEMA 1 La cinta elevadora de la figura 1, de una fábrica de macetas, transporta las mismas desde un alimentador a la zona de embalajes, de forma que la cinta lleva una sola maceta cada vez y que cuando
Diseño Mecánico (Engranajes) Juan Manuel Rodríguez Prieto Ing. M.Sc. Ph.D.
 Juan Manuel Rodríguez Prieto Ing. M.Sc. Ph.D.") Diseño Mecánico (Engranajes) Juan Manuel Rodríguez Prieto Ing. M.Sc. Ph.D. Engranajes 1. Tipos de engranaje 2. Nomenclatura 3. Acción conjugada 4. Propiedades de la involuta 5. Fundamentos 6. Relación
Diseño Mecánico (Engranajes) Juan Manuel Rodríguez Prieto Ing. M.Sc. Ph.D. Engranajes 1. Tipos de engranaje 2. Nomenclatura 3. Acción conjugada 4. Propiedades de la involuta 5. Fundamentos 6. Relación
EJERCICIOS RECUPERACIÓN TECNOLOGÍA INDUSTRIAL I- 2ª PARTE MECANISMOS
 EJERCICIOS RECUPERACIÓN TECNOLOGÍA INDUSTRIAL I- 2ª PARTE MECANISMOS MECANISMOS DE TRANSMISIÓN Y TRANSFORMACIÓN DEL MOVIMIENTO 1.Una polea de 50 mm de diámetro acoplada al árbol motor gira a 1500 rpm.
EJERCICIOS RECUPERACIÓN TECNOLOGÍA INDUSTRIAL I- 2ª PARTE MECANISMOS MECANISMOS DE TRANSMISIÓN Y TRANSFORMACIÓN DEL MOVIMIENTO 1.Una polea de 50 mm de diámetro acoplada al árbol motor gira a 1500 rpm.
sen sen sen a 2 a cos cos 2 a
 BLOQUE I: TRIGONOMETRÍA Y TRIÁNGULOS.- Sabiendo que tg g y cot, calcular tg y cos( ).- Demostrar razonadamente las fórmulas del seno, coseno y tangente del ángulo mitad.- Demostrar las siguientes igualdades:
BLOQUE I: TRIGONOMETRÍA Y TRIÁNGULOS.- Sabiendo que tg g y cot, calcular tg y cos( ).- Demostrar razonadamente las fórmulas del seno, coseno y tangente del ángulo mitad.- Demostrar las siguientes igualdades:
Ejercicios de recuperación de 4º de ESO 1ª Evaluación. Cinemática
 Ejercicios de recuperación de 4º de ESO 1ª Evaluación. Cinemática Descripción del movimiento 1.- Enumera todos aquellos factores que te parezcan relevantes para describir un movimiento. 2.- Es verdadera
Ejercicios de recuperación de 4º de ESO 1ª Evaluación. Cinemática Descripción del movimiento 1.- Enumera todos aquellos factores que te parezcan relevantes para describir un movimiento. 2.- Es verdadera
Caja de cambios. Precisamente lo que hace una caja de cambios es engranar dos piñones de distinto número de dientes para
 Caja de cambios Constituye un mecanismo que permite mantener el giro del motor a la potencia y par más conveniente a cualquier velocidad a que desplacemos el automóvil, y como la caja de cambios está compuesta
Caja de cambios Constituye un mecanismo que permite mantener el giro del motor a la potencia y par más conveniente a cualquier velocidad a que desplacemos el automóvil, y como la caja de cambios está compuesta
Diseño de una transmisión mecánica continuamente variable Pág. 45. ANEXO D: Cálculos
 Diseño de una transmisión mecánica continuamente variable Pág. 45 ANEXO D: Cálculos Pág. 46 Diseño de una transmisión mecánica continuamente variable Diseño de una transmisión mecánica continuamente variable
Diseño de una transmisión mecánica continuamente variable Pág. 45 ANEXO D: Cálculos Pág. 46 Diseño de una transmisión mecánica continuamente variable Diseño de una transmisión mecánica continuamente variable
Tolerancias Dimensionales. ISO 286
 Tolerancias Dimensionales. ISO 286 Tolerancias Dimensionales Tolerancia (T) de una medida es la diferencia entre las medidas máxima y mínima permitidas. t = 7,5-7,4 = 0,1 T = 7,8-7,5 = 0,3 Tolerancias
Tolerancias Dimensionales. ISO 286 Tolerancias Dimensionales Tolerancia (T) de una medida es la diferencia entre las medidas máxima y mínima permitidas. t = 7,5-7,4 = 0,1 T = 7,8-7,5 = 0,3 Tolerancias
Área: EDUCACION TECNOLOGICA Asignatura: TECNOLOGIA II. Título TRANSMISIONES MECANICAS. Curso 2 AÑO Año: Pag.1/15
 Área: EDUCACION TECNOLOGICA Asignatura: TECNOLOGIA II Título TRANSMISIONES MECANICAS Curso 2 AÑO Año: 2006 Pag.1/15 INTRODUCCION Desde tiempos inmemorables el hombre realizó grandes esfuerzos para las
Área: EDUCACION TECNOLOGICA Asignatura: TECNOLOGIA II Título TRANSMISIONES MECANICAS Curso 2 AÑO Año: 2006 Pag.1/15 INTRODUCCION Desde tiempos inmemorables el hombre realizó grandes esfuerzos para las
TEORÍA DE MECANISMOS Y MÁQUINAS. EJERCICIOS DE ENGRANAJES.
 1. Realice un boceto de cada uno de los elementos siguientes: a. Engranaje helicoidal paralelo, con ángulo de hélice de 30º y relación e = 1/3. b. Engranaje de tornillo sinfín, con ángulo de hélice de
1. Realice un boceto de cada uno de los elementos siguientes: a. Engranaje helicoidal paralelo, con ángulo de hélice de 30º y relación e = 1/3. b. Engranaje de tornillo sinfín, con ángulo de hélice de
EJERCICIOS DE MECANISMOS II PARA 1º ESO. En todos los ejercicios hay que dibujar un esquema del mecanismo
 EJERCICIOS DE MECANISMOS II PARA 1º ESO En todos los ejercicios hay que dibujar un esquema del mecanismo 1) Un motor gira a 1000 rpm y su eje tiene 10 mm de diámetro. Se quiere reducir la velocidad del
EJERCICIOS DE MECANISMOS II PARA 1º ESO En todos los ejercicios hay que dibujar un esquema del mecanismo 1) Un motor gira a 1000 rpm y su eje tiene 10 mm de diámetro. Se quiere reducir la velocidad del
M2 - Creación Virtual de Mecanismos Planos en Maquinas v2015- Prof. Dr. José L Oliver
 6. Ejercicios de Trenes Planetarios Rectos y Cónicos. EJEMPLO 1 En la siguiente figura se presenta un tren planterio invertido. El engranaje 2 esta sujeto a su eje y es impulsado a 250 rpm en el mismo
6. Ejercicios de Trenes Planetarios Rectos y Cónicos. EJEMPLO 1 En la siguiente figura se presenta un tren planterio invertido. El engranaje 2 esta sujeto a su eje y es impulsado a 250 rpm en el mismo
1) La relación de transmisión en una articulación o junta cardan siempre es: a) 2 b) 1 c) Depende del número de revoluciones d) 0,5
 La relación de transmisión en una articulación o junta cardan siempre es: a) 2 b) 1 c) Depende del número de revoluciones d) 0,5") Tecnología Industrial I Rodear la respuesta correcta: Sistemas mecánicos Ejercicios Repaso Curso 2009/10 1) La relación de transmisión en una articulación o junta cardan siempre es: a) 2 b) 1 c) Depende
Tecnología Industrial I Rodear la respuesta correcta: Sistemas mecánicos Ejercicios Repaso Curso 2009/10 1) La relación de transmisión en una articulación o junta cardan siempre es: a) 2 b) 1 c) Depende
Z 1 = 8 Z 2 = 16 W 1 Z 1 = W 2 Z 2
 7- SISTEMAS DE ENGRANAJES Para que dos ruedas dentadas engranen entre sí, el tamaño de los dientes de cada una deben ser iguales. Z 1 = 8 Z 2 = 16 El número de dientes de un engranaje se representa por
7- SISTEMAS DE ENGRANAJES Para que dos ruedas dentadas engranen entre sí, el tamaño de los dientes de cada una deben ser iguales. Z 1 = 8 Z 2 = 16 El número de dientes de un engranaje se representa por
Es un conjunto de ruedas dentadas que sirve para transmitir un movimiento circular entre dos ejes.
 QUÉ ES UN ENGRANAJE? Es un conjunto de ruedas dentadas que sirve para transmitir un movimiento circular entre dos ejes. Ruedas normalmente metálicas atravesadas por un eje En su periferia presenta unos
QUÉ ES UN ENGRANAJE? Es un conjunto de ruedas dentadas que sirve para transmitir un movimiento circular entre dos ejes. Ruedas normalmente metálicas atravesadas por un eje En su periferia presenta unos
El objetivo de esta actividad es practicar la relación de transmisión y reflexionar sobre las peculiaridades del mecanismo de polea-correa.
 El objetivo de esta actividad es practicar la relación de transmisión y reflexionar sobre las peculiaridades del mecanismo de polea-correa. V1=20v/min., V2=X EJERCICIO RESUELTO. 1. El sistema de la figura
El objetivo de esta actividad es practicar la relación de transmisión y reflexionar sobre las peculiaridades del mecanismo de polea-correa. V1=20v/min., V2=X EJERCICIO RESUELTO. 1. El sistema de la figura
La cinemática es la parte de la física que se encarga del estudio del movimiento sin importar las causas que lo originan.
 CINEMATICA La cinemática es la parte de la física que se encarga del estudio del movimiento sin importar las causas que lo originan. SISTEMA DE REFERENCIA Lo primero que hacemos para saber que un cuerpo
CINEMATICA La cinemática es la parte de la física que se encarga del estudio del movimiento sin importar las causas que lo originan. SISTEMA DE REFERENCIA Lo primero que hacemos para saber que un cuerpo
Relación de Transmisión (Mecanismos de Transmisión Circular)
") Relación de Transmisión ( de Transmisión Circular) En todos los sistemas de transmisión por poleas, ruedas de fricción, engranajes o ruedas dentadas+cadena, se consigue un aumento o disminución de la velocidad
Relación de Transmisión ( de Transmisión Circular) En todos los sistemas de transmisión por poleas, ruedas de fricción, engranajes o ruedas dentadas+cadena, se consigue un aumento o disminución de la velocidad
θ = θ 1 -θ 0 θ 1 = ángulo final; θ 0 = ángulo inicial. Movimiento circular uniforme (MCU) :
 :") Movimiento circular uniforme (MCU) : Es el movimiento de un cuerpo cuya trayectoria es una circunferencia y describe arcos iguales en tiempos iguales. Al mismo tiempo que recorremos un espacio sobre la
Movimiento circular uniforme (MCU) : Es el movimiento de un cuerpo cuya trayectoria es una circunferencia y describe arcos iguales en tiempos iguales. Al mismo tiempo que recorremos un espacio sobre la
I.E.S. " HERNÁN PÉREZ DEL PULGAR CIUDAD REAL MECANISMOS
 MECANISMOS. Indica el sentido de giro de todas las poleas, si la polea motriz (la de la izquierda) girase en el sentido de las agujas del reloj. Indica también si se son mecanismos reductores o multiplicadores
MECANISMOS. Indica el sentido de giro de todas las poleas, si la polea motriz (la de la izquierda) girase en el sentido de las agujas del reloj. Indica también si se son mecanismos reductores o multiplicadores
Examen de TEORIA DE MAQUINAS Septiembre 96 Nombre...
 Examen de TEORIA DE MAQUINAS Septiembre 96 Nombre... El mecanismo de la figura es un pantógrafo, que se utiliza para ampliar o reducir dibujos. Para ampliar un dibujo, se coloca un lápiz en el punto F
Examen de TEORIA DE MAQUINAS Septiembre 96 Nombre... El mecanismo de la figura es un pantógrafo, que se utiliza para ampliar o reducir dibujos. Para ampliar un dibujo, se coloca un lápiz en el punto F
TEMA 1 CINEMATICA MOVIMIENTOS EN DOS DIMENSIONES MOVIMIENTO CIRCULAR
 TEMA 1 CINEMATICA MOVIMIENTOS EN DOS DIMENSIONES MOVIMIENTO CIRCULAR CONTENIDOS REPASO DEL ÁLGEBRA VECTORIAL Proyección, componentes y módulo de un vector Operaciones: suma, resta, producto escalar y producto
TEMA 1 CINEMATICA MOVIMIENTOS EN DOS DIMENSIONES MOVIMIENTO CIRCULAR CONTENIDOS REPASO DEL ÁLGEBRA VECTORIAL Proyección, componentes y módulo de un vector Operaciones: suma, resta, producto escalar y producto
EJERCICIOS DE FÍSICA
 EJERCICIOS DE FÍSICA 1. El vector posición de un punto, en función del tiempo, viene dado por: r(t)= t i + (t 2 +2) j (S.I.) Calcular: a) La posición, velocidad y aceleración en el instante t= 2 s.; b)
EJERCICIOS DE FÍSICA 1. El vector posición de un punto, en función del tiempo, viene dado por: r(t)= t i + (t 2 +2) j (S.I.) Calcular: a) La posición, velocidad y aceleración en el instante t= 2 s.; b)
PRINCIPIOS DEL TREN DE FUERZA FUNCIONES DEL TREN DE FUERZA 19/07/2014. qué es Tren de fuerza?
 qué es Tren de fuerza? Es un grupo de componentes que trabajan juntos para transferir energía desde la fuente donde se produce la energía al punto donde se requiere realizar un trabajo. FUNCIONES DEL TREN
qué es Tren de fuerza? Es un grupo de componentes que trabajan juntos para transferir energía desde la fuente donde se produce la energía al punto donde se requiere realizar un trabajo. FUNCIONES DEL TREN
Un mecanismo nos ayuda a realizar un trabajo, modificando la forma o entidad de la fuerza que realizamos.
 Los seres humanos buscamos siempre la forma de facilitar nuestro trabajo y para ayudarnos desarrollamos la tecnología, la cual no siempre es electrónica o eléctrica, hay muchos elementos mecánicos que
Los seres humanos buscamos siempre la forma de facilitar nuestro trabajo y para ayudarnos desarrollamos la tecnología, la cual no siempre es electrónica o eléctrica, hay muchos elementos mecánicos que
UNIVERSIDAD NACIONAL DE EDUCACIÓN A DISTANCIA
 UNIVERSIDAD NACIONAL DE EDUCACIÓN A DISTANCIA NOMBRE... APELLIDOS... CALLE... POBLACIÓN... PROVINCIA... C. P.... SISTEMAS MECÁNICOS E.T.S. de Ingenieros Industriales PRUEBA DE EVALUACIÓN A DISTANCIA /
UNIVERSIDAD NACIONAL DE EDUCACIÓN A DISTANCIA NOMBRE... APELLIDOS... CALLE... POBLACIÓN... PROVINCIA... C. P.... SISTEMAS MECÁNICOS E.T.S. de Ingenieros Industriales PRUEBA DE EVALUACIÓN A DISTANCIA /
6. Un hombre de 70 kg de masa se encuentra en la cabina de un ascensor, cuya altura es de 3 m.
 1 1. De los extremos de una cuerda que pasa por la garganta de una polea sin rozamiento y de masa despreciable, cuelgan dos masas iguales de 200 gramos cada una. Hallar la masa que habrá de añadirse a
1 1. De los extremos de una cuerda que pasa por la garganta de una polea sin rozamiento y de masa despreciable, cuelgan dos masas iguales de 200 gramos cada una. Hallar la masa que habrá de añadirse a
engranaje ruedas dentadas corona piñón
 Se denomina engranaje o ruedas dentadas al mecanismo utilizado para transmitir potencia mecánica entre las distintas partes de una máquina. Los engranajes están formados por dos ruedas dentadas, de las
Se denomina engranaje o ruedas dentadas al mecanismo utilizado para transmitir potencia mecánica entre las distintas partes de una máquina. Los engranajes están formados por dos ruedas dentadas, de las
Problemas de Física 1 o Bachillerato
 Problemas de Física 1 o Bachillerato Conservación de la cantidad de movimiento 1. Calcular la velocidad de la bola m 2 después de la colisión, v 2, según se muestra en la siguiente figura. El movimiento
Problemas de Física 1 o Bachillerato Conservación de la cantidad de movimiento 1. Calcular la velocidad de la bola m 2 después de la colisión, v 2, según se muestra en la siguiente figura. El movimiento
Examen de TEORIA DE MAQUINAS Diciembre 03 Nombre...
 Examen de TEORIA DE MAQUINAS Diciembre 03 Nombre... La figura muestra un manipulador paralelo horizontal plano, que consta de una plataforma en forma de triángulo equilátero de lado l, cuya masa m se halla
Examen de TEORIA DE MAQUINAS Diciembre 03 Nombre... La figura muestra un manipulador paralelo horizontal plano, que consta de una plataforma en forma de triángulo equilátero de lado l, cuya masa m se halla
CAPITULO 7 LUGARES GEOMETRICOS 7.1 INTRODUCCION. Z R jx X jwl, si 0 W R Z
 CAPITULO 7 LUGARES GEOMETRICOS 7. INTRODUCCION Si tenemos elementos que pueden variar sus valores en un circuito, ya sea una resistencia una reactancia o la frecuencia de la señal de entrada, las respuestas
CAPITULO 7 LUGARES GEOMETRICOS 7. INTRODUCCION Si tenemos elementos que pueden variar sus valores en un circuito, ya sea una resistencia una reactancia o la frecuencia de la señal de entrada, las respuestas
Unidad III Movimiento de los Cuerpos (Cinemática) Ejercicios Matemáticos
 Ejercicios Matemáticos") Unidad III Movimiento de los Cuerpos (Cinemática) Ejercicios Matemáticos Ing. Laura Istabhay Ensástiga Alfaro. 1 Ejercicios de movimiento Horizontal. 1. Un automóvil viaja inicialmente a 20 m/s y está
Unidad III Movimiento de los Cuerpos (Cinemática) Ejercicios Matemáticos Ing. Laura Istabhay Ensástiga Alfaro. 1 Ejercicios de movimiento Horizontal. 1. Un automóvil viaja inicialmente a 20 m/s y está
MECÁNICA II CURSO 2004/05
 1.1.- Movimientos de un sólido rígido. (rotación alrededor de ejes fijos) 1.1.1 El conjunto representado se compone de dos varillas y una placa rectangular BCDE soldadas entre sí. El conjunto gira alrededor
1.1.- Movimientos de un sólido rígido. (rotación alrededor de ejes fijos) 1.1.1 El conjunto representado se compone de dos varillas y una placa rectangular BCDE soldadas entre sí. El conjunto gira alrededor
SAN JUAN DE AZNALFARACHE (SEVILLA) PROBLEMAS DE MECANISMOS
 PROBLEMAS DE MECANISMOS") IES MTEO LEMÁN SN JUN DE ZNLFRCHE (SEVILL) PROBLEMS DE MECNISMOS º ESO MOTOR D 4 5 6 7 B C P PEDRO J. CSTEL GIL-TORESNO DEPRTMENTO DE TECNOLOGÍ PROBLEMS DE MECNISMOS Calcula la fuerza F y el desplazamiento
IES MTEO LEMÁN SN JUN DE ZNLFRCHE (SEVILL) PROBLEMS DE MECNISMOS º ESO MOTOR D 4 5 6 7 B C P PEDRO J. CSTEL GIL-TORESNO DEPRTMENTO DE TECNOLOGÍ PROBLEMS DE MECNISMOS Calcula la fuerza F y el desplazamiento
Campo Eléctrico. Fig. 1. Problema número 1.
 Campo Eléctrico 1. Cuatro cargas del mismo valor están dispuestas en los vértices de un cuadrado de lado L, tal como se indica en la figura 1. a) Hallar el módulo, dirección y sentido de la fuerza eléctrica
Campo Eléctrico 1. Cuatro cargas del mismo valor están dispuestas en los vértices de un cuadrado de lado L, tal como se indica en la figura 1. a) Hallar el módulo, dirección y sentido de la fuerza eléctrica
MECÁNICA II CURSO 2006/07
 1.- Movimientos de un sólido rígido. (rotación alrededor de ejes fijos) 1.1 El conjunto representado se compone de dos varillas y una placa rectangular BCDE soldadas entre sí. El conjunto gira alrededor
1.- Movimientos de un sólido rígido. (rotación alrededor de ejes fijos) 1.1 El conjunto representado se compone de dos varillas y una placa rectangular BCDE soldadas entre sí. El conjunto gira alrededor
Transmisión. Rt=θC/θM=Z1/Z2. Rtt=Rt1*Rt2*Rt3*Rtα. Trenes de engranaje. Trenes de engranaje fijos. Cátedra de Mecánica y Maquinaria Agrícola
 Transmisión Trenes de engranaje Se llama trenes de engranaje a la combinación de rueda dentada, donde el movimiento de salida de una es el movimiento de entrada de otra. Una transmisión mediante engranajes,
Transmisión Trenes de engranaje Se llama trenes de engranaje a la combinación de rueda dentada, donde el movimiento de salida de una es el movimiento de entrada de otra. Una transmisión mediante engranajes,
TERCER EXAMEN PARCIAL INTRODUCCIÓN AL ESTUDIO DE LOS MECANISMOS PROFESOR: ING. MOISES MENDOZA LINARES
 1. En el tren de engranes mostrado en la figura el engrane 5 está maquinado en tal forma que tiene dientes externos e internos. Si el planetario 2 gira a 3000 rpm y el piñón 6 lo hace a 1200 rpm, ambos
1. En el tren de engranes mostrado en la figura el engrane 5 está maquinado en tal forma que tiene dientes externos e internos. Si el planetario 2 gira a 3000 rpm y el piñón 6 lo hace a 1200 rpm, ambos
3º ESO - Ejercicios de mecanismos HOJA 1
 3º ESO - Ejercicios de mecanismos HOJA 1 1. Para sacar una muela hay que hacer una fuerza de 980 N. La dentista utiliza para ello unas tenazas que tienen un mango de 15 cm. La distancia entre el extremo
3º ESO - Ejercicios de mecanismos HOJA 1 1. Para sacar una muela hay que hacer una fuerza de 980 N. La dentista utiliza para ello unas tenazas que tienen un mango de 15 cm. La distancia entre el extremo
Capitulo VI. VI.2 Engranajes cilíndricos. Universidad de Cantabria Departamento de Ing. Estructural y Mecánica
 Capitulo VI VI. Engranajes cilíndricos Capítulo VI Engranajes VI. Introducción n a los engranajes. VI. Engranajes cilíndricos. Engranajes con perfil de evolvente. Espesor del diente. Relación de contacto.
Capitulo VI VI. Engranajes cilíndricos Capítulo VI Engranajes VI. Introducción n a los engranajes. VI. Engranajes cilíndricos. Engranajes con perfil de evolvente. Espesor del diente. Relación de contacto.
32. Se conecta un condensador de 10 µf y otro de 20 µf en paralelo y se aplica al conjunto
 2. Conductores y dieléctricos. Capacidad, condensadores. Energía electrostática. 24. Cargamos un condensador de 100 pf hasta que adquiere una ddp de 50 V. En ese momento desconectamos la batería. Conectamos
2. Conductores y dieléctricos. Capacidad, condensadores. Energía electrostática. 24. Cargamos un condensador de 100 pf hasta que adquiere una ddp de 50 V. En ese momento desconectamos la batería. Conectamos
EJERCICIOS DEL CAPÍTULO 9 - ELECTROMAGNETISMO
 EJERCICIOS DEL CAPÍTULO 9 - ELECTROMAGNETISMO C9. 1 Aceleramos iones de los isótopos C-12, C-13 y C-14 con una d.d.p. de 100 kv y los hacemos llegar a un espectrógrafo de masas perpendicularmente a la
EJERCICIOS DEL CAPÍTULO 9 - ELECTROMAGNETISMO C9. 1 Aceleramos iones de los isótopos C-12, C-13 y C-14 con una d.d.p. de 100 kv y los hacemos llegar a un espectrógrafo de masas perpendicularmente a la
5. ENGRANAJES CILÍNDRICOS RECTOS
 5. ENGRANAJES CILÍNDRICOS RECTOS 5.1. Introducción El objetivo de los engranajes es transmitir rotaciones entre ejes con una relación de velocidades angulares constante. Este objetivo se puede lograr también
5. ENGRANAJES CILÍNDRICOS RECTOS 5.1. Introducción El objetivo de los engranajes es transmitir rotaciones entre ejes con una relación de velocidades angulares constante. Este objetivo se puede lograr también
EJERCICIOS BLOQUE 2.1: MÁQUINAS Y SISTEMAS MECÁNICOS
 EJERCICIOS BLOQUE 2.1: MÁQUINAS Y SISTEMAS MECÁNICOS 1. Con un remo de 3 m de longitud se quiere vencer la resistencia de 400 kg que ofrece una barca mediante una potencia de 300 kg. A qué distancia del
EJERCICIOS BLOQUE 2.1: MÁQUINAS Y SISTEMAS MECÁNICOS 1. Con un remo de 3 m de longitud se quiere vencer la resistencia de 400 kg que ofrece una barca mediante una potencia de 300 kg. A qué distancia del
Examen de TECNOLOGIA DE MAQUINAS Febrero 95 Nombre...
 Examen de TECNOLOGIA DE MAQUINAS Febrero 95 Nombre... Sobre la barra de sección circular de la figura, fabricada en acero AISI 1040 estirado en frío, se desplaza una carga puntual de 80 Kg, moviéndose
Examen de TECNOLOGIA DE MAQUINAS Febrero 95 Nombre... Sobre la barra de sección circular de la figura, fabricada en acero AISI 1040 estirado en frío, se desplaza una carga puntual de 80 Kg, moviéndose
TRANSMISION POR ENGRANAJES Y CADENAS ACTIVIDAD NUMERO 01 (TERCER PERIODO)
") INSTITUCION EDUCATIVA MIRAFLORES ARAE DE TECNOLOGIA A INFORMATICA GRADO UNDECIMO TERCER PERIODO 2014 TRANSMISION POR ENGRANAJES Y CADENAS ACTIVIDAD NUMERO 01 (TERCER PERIODO) ABRIR EL ARCHIVO ADJUNTO LLAMADO
INSTITUCION EDUCATIVA MIRAFLORES ARAE DE TECNOLOGIA A INFORMATICA GRADO UNDECIMO TERCER PERIODO 2014 TRANSMISION POR ENGRANAJES Y CADENAS ACTIVIDAD NUMERO 01 (TERCER PERIODO) ABRIR EL ARCHIVO ADJUNTO LLAMADO
I.E.S. " HERNÁN PÉREZ DEL PULGAR CIUDAD REAL MECANISMOS
 MECANISMOS 1. Indica el sentido de giro de todas las poleas, si la polea motriz (la de la izquierda) girase en el sentido de las agujas del reloj. Indica también si se son mecanismos reductores o multiplicadores
MECANISMOS 1. Indica el sentido de giro de todas las poleas, si la polea motriz (la de la izquierda) girase en el sentido de las agujas del reloj. Indica también si se son mecanismos reductores o multiplicadores
ENGRANAJES. Indica en qué sentido girará la última rueda conducida y cuál es el mecanismo de transmisión utilizado.
 ENGRANAJES. Indica en qué sentido girará la última rueda conducida y cuál es el mecanismo de transmisión utilizado.. Cuál de las ruedas, A o C, girará más deprisa en la transmisión de la figura?. Razónalo....
ENGRANAJES. Indica en qué sentido girará la última rueda conducida y cuál es el mecanismo de transmisión utilizado.. Cuál de las ruedas, A o C, girará más deprisa en la transmisión de la figura?. Razónalo....
TECNOLOGÍA. UNIDAD 7 MÁQUINAS Y MECANISMOS 3º E.S.O.
 1- Indica para cada caso hacia dónde se inclina la balanza, hacia la derecha, hacia la izquierda o si está equilibrada. 2- Qué mecanismos se pueden emplear si tengo que subir un piano de cola hasta un
1- Indica para cada caso hacia dónde se inclina la balanza, hacia la derecha, hacia la izquierda o si está equilibrada. 2- Qué mecanismos se pueden emplear si tengo que subir un piano de cola hasta un
12.7. Cadenas cinemáticas. A Representación gráfica. Cadenas cinemáticas.
 1 12.7. Cadenas cinemáticas A Representación gráfica Cadenas cinemáticas. 2 B Cálculos 3 C Caja de velocidades Ejemplo 7: caja de velocidades con engranajes desplazables. Ejemplo 8: caja de velocidades
1 12.7. Cadenas cinemáticas A Representación gráfica Cadenas cinemáticas. 2 B Cálculos 3 C Caja de velocidades Ejemplo 7: caja de velocidades con engranajes desplazables. Ejemplo 8: caja de velocidades
Ejercicios resueltos de tiro oblicuo
 Ejercicios resueltos de tiro oblicuo 1) Un arquero dispara una flecha cuya velocidad de salida es de 100m/s y forma un ángulo de 30º con la horizontal. Calcula: a) El tiempo que la flecha está en el aire.
Ejercicios resueltos de tiro oblicuo 1) Un arquero dispara una flecha cuya velocidad de salida es de 100m/s y forma un ángulo de 30º con la horizontal. Calcula: a) El tiempo que la flecha está en el aire.
LECCIÓN 9 5 PROBLEMAS RESUELTOS
 LECCIÓN 9 PROBLEMAS RESUELTOS Problema. El largo de un rectángulo mide 8 m y su ancho mide 2 m. Cuál de las siguientes es la mayor longitud de una varilla que cabe exactamente tanto en el largo como en
LECCIÓN 9 PROBLEMAS RESUELTOS Problema. El largo de un rectángulo mide 8 m y su ancho mide 2 m. Cuál de las siguientes es la mayor longitud de una varilla que cabe exactamente tanto en el largo como en
Facultad de Ciencias Curso 2010-2011 Grado de Óptica y Optometría SOLUCIONES PROBLEMAS FÍSICA. TEMA 4: CAMPO MAGNÉTICO
 SOLUCIONES PROLEMAS FÍSICA. TEMA 4: CAMPO MAGNÉTICO. Dos conductores rectilíneos, paralelos mu largos transportan corrientes de sentidos contrarios e iguales a,5 A. Los conductores son perpendiculares
SOLUCIONES PROLEMAS FÍSICA. TEMA 4: CAMPO MAGNÉTICO. Dos conductores rectilíneos, paralelos mu largos transportan corrientes de sentidos contrarios e iguales a,5 A. Los conductores son perpendiculares
TEMA 4: MECANISMOS. 2º E.S.O. I.E.S. "San Isidro" Talavera --Dpto. de Tecnología--
 TEMA 4: MECANISMOS. 2º E.S.O. 1 ÍNDICE: 0.- INTRODUCCIÓN. 1.- TIPOS DE MOVIMIENTO. 2.- CONCEPTOS BÁSICOS SOBRE EL ESTUDIO DE LAS MÁQUINAS. 3.- CLASIFICACIÓN DE LOS MECANISMOS. 4.- MECANISMOS DE TRANSMISIÓN
TEMA 4: MECANISMOS. 2º E.S.O. 1 ÍNDICE: 0.- INTRODUCCIÓN. 1.- TIPOS DE MOVIMIENTO. 2.- CONCEPTOS BÁSICOS SOBRE EL ESTUDIO DE LAS MÁQUINAS. 3.- CLASIFICACIÓN DE LOS MECANISMOS. 4.- MECANISMOS DE TRANSMISIÓN
TECNOLOGÍAS Versión impresa MÁQUINAS: TRANSMISIÓN Y TRANS- FORMACIÓN DEL MOVIMIENTO
 TECNOLOGÍAS Versión impresa MÁQUINAS: TRANSMISIÓN Y TRANS- FORMACIÓN DEL MOVIMIENTO Introducción Una máquina es un aparato capaz de transformar energía en trabajo útil. Desde la escoba hasta la lavadora,
TECNOLOGÍAS Versión impresa MÁQUINAS: TRANSMISIÓN Y TRANS- FORMACIÓN DEL MOVIMIENTO Introducción Una máquina es un aparato capaz de transformar energía en trabajo útil. Desde la escoba hasta la lavadora,
A = A < θ R = A + B + C = C+ B + A. b) RESTA O DIFERENCIA DE VECTORES ANÁLISIS VECTORIAL. Es una operación que tiene por finalidad hallar un
 RESTA O DIFERENCIA DE VECTORES ANÁLISIS VECTORIAL. Es una operación que tiene por finalidad hallar un") ANÁLISIS VECTORIAL MAGNITUD FÍSICA Es todo aquello que se puede medir. CLASIFICACIÓN DE MAGNITUDES POR NATURALEZA MAGNITUD ESCALAR: Magnitud definida por completo mediante un número y la unidad de medida
ANÁLISIS VECTORIAL MAGNITUD FÍSICA Es todo aquello que se puede medir. CLASIFICACIÓN DE MAGNITUDES POR NATURALEZA MAGNITUD ESCALAR: Magnitud definida por completo mediante un número y la unidad de medida
Un sistema de referencia se representa mediante unos EJES DE COORDENADAS (x,y), en cuyo origen estaría situado el observador.
, en cuyo origen estaría situado el observador.") UD6 FUERZAS Y MOVIMIENTO EL MOVIMIENTO DE LOS CUERPOS Un cuerpo está en movimiento si cambia de posición con respecto al sistema de referencia; en caso contrario, está en reposo. Sistema de referencia
UD6 FUERZAS Y MOVIMIENTO EL MOVIMIENTO DE LOS CUERPOS Un cuerpo está en movimiento si cambia de posición con respecto al sistema de referencia; en caso contrario, está en reposo. Sistema de referencia
1. Calcula el momento de una fuerza de 100 N que está a una distancia de 0,75 m del punto de apoyo. Resultado: M= 75 NAm
 1.- PALANCAS 1. Calcula el momento de una fuerza de 100 N que está a una distancia de 0,75 m del punto de apoyo. esultado: M= 75 NAm 2. A qué distancia del punto de apoyo está una fuerza de 35 N si tiene
1.- PALANCAS 1. Calcula el momento de una fuerza de 100 N que está a una distancia de 0,75 m del punto de apoyo. esultado: M= 75 NAm 2. A qué distancia del punto de apoyo está una fuerza de 35 N si tiene
CARRERA : Ing. MECÁNICA GUIA DE PROBLEMAS Nº10
 ASIGNATURA : CARRERA : Ing. MECÁNICA GUIA DE PROBLEMAS Nº10 FACULTAD DE INGENIERÍA 2018 1 GUIA DE PROBLEMAS Nº10 PROBLEMA Nº1 El centro del engrane doble rueda sobre la cremallera inferior estacionaria,
ASIGNATURA : CARRERA : Ing. MECÁNICA GUIA DE PROBLEMAS Nº10 FACULTAD DE INGENIERÍA 2018 1 GUIA DE PROBLEMAS Nº10 PROBLEMA Nº1 El centro del engrane doble rueda sobre la cremallera inferior estacionaria,
Ejercicios resueltos de funciones
 Ejercicios resueltos de funciones 1) Representa en un eje de coordenadas los siguientes puntos: A(1,5), B(-3,3), C(0, -4), D (2,0). 2) Representa en dos ejes de coordenadas las funciones siguientes: a)
Ejercicios resueltos de funciones 1) Representa en un eje de coordenadas los siguientes puntos: A(1,5), B(-3,3), C(0, -4), D (2,0). 2) Representa en dos ejes de coordenadas las funciones siguientes: a)
mîquinas de elevación y transporte
 mîquinas de elevación y transporte Tema 3 ; Escaleras mecánicas Juan Carlos Santamarta Cerezal Ingeniero de Montes e ITOP Doctor en Ingeniería por la UPM (ETSICCP, Hidráulica y Energética) 2 contenido
mîquinas de elevación y transporte Tema 3 ; Escaleras mecánicas Juan Carlos Santamarta Cerezal Ingeniero de Montes e ITOP Doctor en Ingeniería por la UPM (ETSICCP, Hidráulica y Energética) 2 contenido
LANZAMIENTO HACIA ARRIBA POR UN PLANO INCLINADO
 LANZAMIENTO HACIA ARRIBA POR UN PLANO INCLINADO 1.- Por un plano inclinado de ángulo y sin rozamiento, se lanza hacia arriba una masa m con una velocidad v o. Se pide: a) Fuerza o fuerzas que actúan sobre
LANZAMIENTO HACIA ARRIBA POR UN PLANO INCLINADO 1.- Por un plano inclinado de ángulo y sin rozamiento, se lanza hacia arriba una masa m con una velocidad v o. Se pide: a) Fuerza o fuerzas que actúan sobre
TEMA 3: MÁQUINAS Y MECÁNICOS
 TEMA 3: MÁQUINAS Y MECÁNICOS Los mecanismos son los elementos encargados del movimiento en las máquinas. Permiten transmitir el movimiento de giro del motor a las diferentes partes del robot. el movimiento
TEMA 3: MÁQUINAS Y MECÁNICOS Los mecanismos son los elementos encargados del movimiento en las máquinas. Permiten transmitir el movimiento de giro del motor a las diferentes partes del robot. el movimiento
Y si la niña estuviera situada a 4m del punto de apoyo?. Qué conclusión puedes sacar?.
 PROBLEMAS DE MÁQUINAS Y MECANISMOS LA PALANCA 1. Indica el tipo de palanca en cada uno de los casos siguientes: 2. A qué distancia del eje de un balancín se tendrá que sentar un niño de 30 kg para que
PROBLEMAS DE MÁQUINAS Y MECANISMOS LA PALANCA 1. Indica el tipo de palanca en cada uno de los casos siguientes: 2. A qué distancia del eje de un balancín se tendrá que sentar un niño de 30 kg para que
INSTITUTO TECNOLÓGICO DE VERACRUZ
 INSTITUTO TECNOLÓGICO DE VERACRUZ TEMA 4.4 ANÁLISIS CINEMÁTICO DE TRENES DE ENGRANES (SIMPLES, COMPUESTOS Y PLANETARIOS) MATERIA MECANISMOS CARRERA INGENIERÍA MECATRÓNICA CATEDRÁTICO DR. JOSÉ ANTONIO GARRIDO
INSTITUTO TECNOLÓGICO DE VERACRUZ TEMA 4.4 ANÁLISIS CINEMÁTICO DE TRENES DE ENGRANES (SIMPLES, COMPUESTOS Y PLANETARIOS) MATERIA MECANISMOS CARRERA INGENIERÍA MECATRÓNICA CATEDRÁTICO DR. JOSÉ ANTONIO GARRIDO
MECANISMOS LOS MECANISMOS SON ELEMENTOS DESTINADOS A TRANSMITIR Y TRANSFORMAR FUERZAS Y MOVIMIENTOS DESDE UN ELEMENTO MOTRIZ A UN ELEMENTO RECEPTOR
 MECANISMOS LOS MECANISMOS SON ELEMENTOS DESTINADOS A TRANSMITIR Y TRANSFORMAR FUERZAS Y MOVIMIENTOS DESDE UN ELEMENTO MOTRIZ A UN ELEMENTO RECEPTOR MECANISMOS DE TRANSMISIÓN LINEAL PALANCA : MÁQUINA SIMPLE.
MECANISMOS LOS MECANISMOS SON ELEMENTOS DESTINADOS A TRANSMITIR Y TRANSFORMAR FUERZAS Y MOVIMIENTOS DESDE UN ELEMENTO MOTRIZ A UN ELEMENTO RECEPTOR MECANISMOS DE TRANSMISIÓN LINEAL PALANCA : MÁQUINA SIMPLE.
Ejercicios de Dinámica
 Ejercicios de Dinámica 1. Una fuerza de 14 N que forma 35 con la horizontal se quiere descomponer en dos fuerzas perpendiculares, una horizontal y otra vertical. Calcula el módulo de las dos fuerzas perpendiculares
Ejercicios de Dinámica 1. Una fuerza de 14 N que forma 35 con la horizontal se quiere descomponer en dos fuerzas perpendiculares, una horizontal y otra vertical. Calcula el módulo de las dos fuerzas perpendiculares
BLOQUE II. ELEMENTOS DE MÁQUINAS. PROBLEMAS. TECNOLOGÍA INDUSTRIAL I. 2. Un motor de 100 CV gira a 3000 rpm. Calcula el par motor. Sol: N.
 BLOQUE II. ELEMENTOS DE MÁQUINAS. PROBLEMAS. TECNOLOGÍA INDUSTRIAL I 1. El cuentakilómetros de una bicicleta marca 30 km/h. El radio de la rueda es de 30 cm. Calcula: a) Velocidad lineal de la rueda en
BLOQUE II. ELEMENTOS DE MÁQUINAS. PROBLEMAS. TECNOLOGÍA INDUSTRIAL I 1. El cuentakilómetros de una bicicleta marca 30 km/h. El radio de la rueda es de 30 cm. Calcula: a) Velocidad lineal de la rueda en
INFORME: SELECCIÓN DE ENGRRANAJES
 INFORME: SELECCIÓN DE ENGRRANAJES AUTOR: Francisco Andrés Candelas Herías Gonzalo Lorenzo Lledó Carlos Alberto Jara Bravo Grupo de Automática, Robótica y Visión Artificial Departamento de Física, Ingeniería
INFORME: SELECCIÓN DE ENGRRANAJES AUTOR: Francisco Andrés Candelas Herías Gonzalo Lorenzo Lledó Carlos Alberto Jara Bravo Grupo de Automática, Robótica y Visión Artificial Departamento de Física, Ingeniería
Cuaderno de Actividades 4º ESO
 Cuaderno de Actividades 4º ESO Relaciones funcionales. Estudio gráfico y algebraico de funciones 1. Interpretación de gráficas 1. Un médico dispone de 1hora diaria para consulta. El tiempo que podría,
Cuaderno de Actividades 4º ESO Relaciones funcionales. Estudio gráfico y algebraico de funciones 1. Interpretación de gráficas 1. Un médico dispone de 1hora diaria para consulta. El tiempo que podría,
RELACION DE PROBLEMAS DE GEOMETRIA. Problemas propuestos para la prueba de acceso del curso 1996/97.
 RELACION DE PROBLEMAS DE GEOMETRIA Problemas propuestos para la prueba de acceso del curso 996/97. º. - Explica cómo se puede hallar el área de un triángulo, a partir de sus coordenadas, en el espacio
RELACION DE PROBLEMAS DE GEOMETRIA Problemas propuestos para la prueba de acceso del curso 996/97. º. - Explica cómo se puede hallar el área de un triángulo, a partir de sus coordenadas, en el espacio
F2 Bach. Movimiento armónico simple
 F Bach Movimiento armónico simple 1. Movimientos periódicos. Movimientos vibratorios 3. Movimiento armónico simple (MAS) 4. Cinemática del MAS 5. Dinámica del MAS 6. Energía de un oscilador armónico 7.
F Bach Movimiento armónico simple 1. Movimientos periódicos. Movimientos vibratorios 3. Movimiento armónico simple (MAS) 4. Cinemática del MAS 5. Dinámica del MAS 6. Energía de un oscilador armónico 7.
Cálculo vectorial en el plano.
 Cálculo vectorial en el plano. Cuaderno de ejercicios MATEMÁTICAS JRM SOLUCIONES Índice de contenidos. 1. Puntos y vectores. Coordenadas y componentes. Puntos en el plano cartesiano. Coordenadas. Vectores
Cálculo vectorial en el plano. Cuaderno de ejercicios MATEMÁTICAS JRM SOLUCIONES Índice de contenidos. 1. Puntos y vectores. Coordenadas y componentes. Puntos en el plano cartesiano. Coordenadas. Vectores
Teoría. 1) Deducir a partir de la figura la expresión del caudal lateral Q s que se consigue alimentando a presión un cojinete hidrodinámico.
 Deducir a partir de la figura la expresión del caudal lateral Q s que se consigue alimentando a presión un cojinete hidrodinámico.") ASIGNATURA GAIA ELEMENTOS DE MÁQUINAS - TECNOLOGÍA DE MÁQUINAS I Septiembre 2004 CURSO KURTSOA 4º Teoría NOMBRE IZENA FECHA DATA 02/09/2004 1) Deducir a partir de la figura la expresión del caudal lateral
ASIGNATURA GAIA ELEMENTOS DE MÁQUINAS - TECNOLOGÍA DE MÁQUINAS I Septiembre 2004 CURSO KURTSOA 4º Teoría NOMBRE IZENA FECHA DATA 02/09/2004 1) Deducir a partir de la figura la expresión del caudal lateral
UNIVERSIDAD TECNOLÓGICA NACIONAL-
 UNIVERSIDAD TECNOLÓGICA NACIONAL- Facultad Regional Bahía Blanca CÁTEDRA: ELEMENTOS DE MAQUINA Trabajo Práctico N 14 Unidad: Análisis de Elementos de Transmisión (Capítulos 8 y 9). Tema: Cálculo de engranajes,
UNIVERSIDAD TECNOLÓGICA NACIONAL- Facultad Regional Bahía Blanca CÁTEDRA: ELEMENTOS DE MAQUINA Trabajo Práctico N 14 Unidad: Análisis de Elementos de Transmisión (Capítulos 8 y 9). Tema: Cálculo de engranajes,
Tecnología 1º E.S.O. Nombre y apellidos: Curso: http://auladetecnologias.blogspot.com/ @TL 1
 Tecnología 1º E.S.O. UERNO E EJERIIOS: Nombre y apellidos: urso: http://auladetecnologias.blogspot.com/ @TL 1 MÁQUINS Y MENISMOS 1. uántos tipos de palancas conoces? Pon al menos dos ejemplos de cada tipo.
Tecnología 1º E.S.O. UERNO E EJERIIOS: Nombre y apellidos: urso: http://auladetecnologias.blogspot.com/ @TL 1 MÁQUINS Y MENISMOS 1. uántos tipos de palancas conoces? Pon al menos dos ejemplos de cada tipo.
Transmisiones de Potencia
 Transmisiones de Potencia Objetivos: Conocer los conceptos básicos que definen las transmisiones de potencia: eficiencia y relación de transmisión. Analizar los diferentes tipos de transmisiones que se
Transmisiones de Potencia Objetivos: Conocer los conceptos básicos que definen las transmisiones de potencia: eficiencia y relación de transmisión. Analizar los diferentes tipos de transmisiones que se
Actividad de Aula 2.0. Engranajes
 Apellidos, Nombre: Curso: Nota: Fecha: Realiza los montajes que se indican a continuación y contesta a las siguientes preguntas: 1.1. Engranaje recto sin cambio de velocidad Cuál es la relación de transmisión?
Apellidos, Nombre: Curso: Nota: Fecha: Realiza los montajes que se indican a continuación y contesta a las siguientes preguntas: 1.1. Engranaje recto sin cambio de velocidad Cuál es la relación de transmisión?
CAMPO GRAVITATORIO. 9. Define el concepto de momento angular. Deduce el teorema de conservación del mismo.
 1. A qué altura sobre la superficie de la Tierra colocaremos un satélite para que su órbita sea geoestacionaria sobre el un punto del Ecuador? RT = 6370 Km (R h= 36000 Km) 2. La Luna en su movimiento uniforme
1. A qué altura sobre la superficie de la Tierra colocaremos un satélite para que su órbita sea geoestacionaria sobre el un punto del Ecuador? RT = 6370 Km (R h= 36000 Km) 2. La Luna en su movimiento uniforme
Los dientes de los engranajes: 1.- Impiden el deslizamiento lo que a su vez permite que los ejes que giran con un sistema de engranajes, puedan estar
 Qué es un engranaje? Un engranaje es una rueda dentada Los engranajes se unen unos a otros por sus dientes (transmisión directa) o a través de una cadena, formando así un sistema transmisor del movimiento.
Qué es un engranaje? Un engranaje es una rueda dentada Los engranajes se unen unos a otros por sus dientes (transmisión directa) o a través de una cadena, formando así un sistema transmisor del movimiento.
Movimiento Circular Movimiento Armónico
 REPÚBLICA BOLIVARIANA DE VENEZUELA MINISTERIO DEL PODER POPULAR PARA LA EDUCACIÓN LICEO BRICEÑO MÉNDEZ S0120D0320 DPTO. DE CONTROL Y EVALUACIÓN PROFESOR: gxâw á atätá 4to Año GUIA # 9 /10 PARTE ( I ) Movimiento
REPÚBLICA BOLIVARIANA DE VENEZUELA MINISTERIO DEL PODER POPULAR PARA LA EDUCACIÓN LICEO BRICEÑO MÉNDEZ S0120D0320 DPTO. DE CONTROL Y EVALUACIÓN PROFESOR: gxâw á atätá 4to Año GUIA # 9 /10 PARTE ( I ) Movimiento
Bicicleta con pedales de movimiento rectilíneo
 Bicicleta con pedales de movimiento rectilíneo I. Zabalza, J. Ros, J.J. Gil, J.M. Pintor, y J.M. Jiménez Departamento de Ingeniería Mecánica, Energética y de Materiales Universidad Pública de Navarra,
Bicicleta con pedales de movimiento rectilíneo I. Zabalza, J. Ros, J.J. Gil, J.M. Pintor, y J.M. Jiménez Departamento de Ingeniería Mecánica, Energética y de Materiales Universidad Pública de Navarra,
b) Podemos aplicar la misma fórmula anterior para el número de vueltas Nv. Es decir:
 Podemos aplicar la misma fórmula anterior para el número de vueltas Nv. Es decir:") EJERIIO RESUELTO. ENGRNJES OPLDOS 1.- Supongamos que en la figura adjunta, el engranaje conducido tiene 20 dientes y el engranaje motriz 60 dientes. Si el engranaje motriz gira a 1200 rpm, averiguar: a)
EJERIIO RESUELTO. ENGRNJES OPLDOS 1.- Supongamos que en la figura adjunta, el engranaje conducido tiene 20 dientes y el engranaje motriz 60 dientes. Si el engranaje motriz gira a 1200 rpm, averiguar: a)