Reflexiones sobre el Punto de Frégier José Araujo - Luis C. Maiarú - Norma Pietrocola
|
|
|
- Lucas Duarte Arroyo
- hace 6 años
- Vistas:
Transcripción
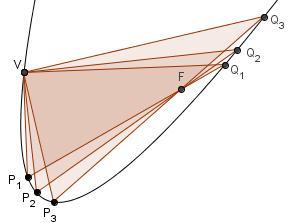
1 Reflexiones sobre el Punto de Frégier José Araujo - Luis C. Maiarú - Norma Pietrocola Resumen En estas notas vamos a referirnos al punto de Frégier de una cónica y a la generalización de este resultado al caso de cuádricas en R n. Naturalmente, en el desarrollo de las notas, se hará uso de algunas propiedades de las funciones cuadráticas en varias variables. 1. Introducción El siguiente teorema fue presentado por Frégier en los Annales de Mathematiques de Gergonne en 1816, [1]: Teorema. Si un segmento variable P Q sobre una cónica subtiende un ángulo recto con un punto V de la cónica, éste pasa por un punto fijo F que se encuentra sobre la normal por V. En la actualidad, el punto F al que hace referencia el teorema precedente, se conoce como punto de Frégier asociado con V. Aunque este teorema ha motivado interesantes problemas geómetricos en el pasado, [2],[3], son pocas las referencias que hemos podido obtener al respecto. El título Reflexiones sobre el Punto de Frégier se debe al hecho que, en el caso del elipsoide, los puntos en la intersección de una recta con el elipsoide son permutados por una isometría del elipsoide conocida como reflexión, según la definición en (5), de modo que las variedades concurrentes están determinadas por las imágenes de las reflexiones cuyas raíces forman una base ortogonal de R n Punto de Frégier en cónicas Las figuras a continuación, se incluyen a modo de ilustración del teorema de Frégier. Las mismas se pueden obtener, e incluso manipulear, haciendo uso de programas interactivos asociados a la geometría del plano. Creemos oportuno alentar el uso de estos programas para experimentar la geometría, sobre todo, teniendo en cuenta la posibilidad de obtener aquellos programas de libre acceso que se ofrecen en internet. 3

2 Elipse Parábola 4

3 Hipérbola Algo especial ocurre con la hipérbola equilátera, como se muestra en la figura siguiente, todas las cuerdas son paralelas, en este caso, en lugar de un punto común, las cuerdas tienen una dirección común. Hipérbola Equilátera 5
4 Resultados preliminares A continuación exponemos sobre los resultados clásicos del álgebra lineal los que serán usados para establecer el teorema de Frégier de un modo más general. En primer lugar, nos referimos a la correspondencia entre un espacio vectorial V y su espacio dual V, obtenida a partir de una forma bilineal no degenerada definida sobre V. Es conveniente recordar que una forma bilineal B es no degenerada si verifica: B (v, u) = 0 ( u V ) v = 0 Observamos además que, fijado v V, la aplicación u B (v, u) definida de V en K es un elemento de V que notaremos con B (v, ). Teorema 1 Sea V un espacio vectorial de dimensión finita y B una forma bilineal no degenerada definida sobre V. La aplicación entre V y el espacio dual V de V dada por: v B (v, ) (v V ) es un isomorfismo. Demostración. Dado que B es una forma bilineal, la aplicación definida es una transformación lineal cuyo núcleo está dado por los vectores v V tales que B (v, ) es idénticamente nula, es decir B (v, u) = 0 para todo u V. Por ser B no degenerada, debe ser v = 0 y así, la aplicación definida es inyectiva. La suryectividad de esta aplicación es consecuencia del teorema de la dimensión y del hecho que V y V tienen la misma dimensión. Como consecuencia del teorema precedente, en un espacio V equipado con una forma bilineal no degenerada B, a cada elemento ϕ V podemos asociarle un vector v ϕ V tal que: Conservando las notaciones previas, se tiene: ϕ (u) = B (v ϕ, u) u V (1) Proposición 2 Supongamos V admite u 1,..., u n una base ortonormal respecto de B, es decir B (u i, u j ) = δ ij. Para cada ϕ V se verifica: ϕ (u i ) u i = v ϕ (2) I=1 6
5 Demostración. Como u 1,..., u n es una base ortonormal respecto de B, se tiene: v ϕ = = B (v ϕ, u i ) u i I=1 ϕ (u i ) u i I=1 Completamos la exposición de los resultados preliminares observando la invarianza de la traza de una forma bilineal real bajo cambios de coordenadas ortogonales. Llamaremos traza de la forma bilineal B referida a la base u 1,..., u n de V al valor: = B (u i, u i ) (3) I=1 Proposición 3 Si las base u 1,..., u n y v 1,..., v n del espacio vectorial real V, están relacionadas mediante una matriz ortogonal, entonces, toda bilineal B tiene la misma traza respecto de ambas bases. Demostración. Por las hipótesis, hay una matriz ortogonal P = [p ij ] tal que: u i = de esto surge la identidad matricial: p ij v j j=1 [B (u i, u j )] = P [B (v i, v j )] P t donde P t indica la traspuesta de P. Como P es ortogonal, resulta P t = P 1 luego: tr ([B (u i, u j )]) = tr ( P [B (v i, v j )] P 1) = tr ( P 1 P [B (v i, v j )] ) = tr ([B (v i, v j )]) aquí usamos el hecho que tr (AB) = tr (BA) para A, B matrices de orden n. 7
6 1.2. En el elipsoide Vamos a considerar primero el caso de un elipsoide en R n, para luego mostrar que las mismas ideas pueden ser usadas en el caso de una cuádrica bajo ligeras restricciones. Fijamos la ecuación del elipsoide en su forma normal como: Q (v) = k donde Q es una forma cuadrática en R n positiva definida y k es una constante positiva. Asociada con cada forma cuadrática Q, se tiene la forma bilineal B definida por: Q (u + v) Q (u) Q (v) B (u, v) = (u, v R n ) 2 o la expresión equivalente: Q (u + v) = Q (u) + 2B (u, v) + Q (v) (4) Dado u R n, u 0, la transformación lineal s u de R n definida por: B (v, u) s u (v) = v 2 Q (u) u (5) se llama reflexión con raíz u. Queda claro que esta reflexión está construída sobre la base de su raíz u y la forma bilineal B. Notemos además que Q (u) > 0 si u 0, dado que Q es positiva definida. Sin embargo, una reflexión con raíz u puede ser definida por la expresión en (5), con la única condición que Q (u) 0 donde Q es una forma cuadrática. Entre las propiedades de una reflexión, destacamos las enunciadas en la siguiente proposición: Proposición 4 i) s λu = s u, λ R. ii) s 2 u = id V. iii) Q (s u (v)) = Q (v). iv) Si una recta paralela a u corta al elipsoide Q (v) = k en los puntos p y q, entonces q = s u (p). Demostración. i) Resulta claro de la definición en (5). 8
7 luego ii) y iii) Escribiendo v = λu + h con λ R y B (h, u) = 0 se tiene: y por otra parte: s u (v) = λu + h s u (s u (v)) = s u ( λu + h) = λu + h = v Q (s u (v)) = Q ( λu + h) = Q ( λu) + 2B ( λu, h) + Q (h) = Q (λu) + Q (h) = Q (v) iv) Sea l la recta paralela a u. Dado que la restricción de Q a l es un polinomio de grado a lo sumo 2, l corta al elipsoide en a lo sumo dos puntos. Por otra parte, por iii) s u transforma el elipsoide en sí mismo, esto mismo ocurre con l, en efecto, poniendo l = {p + λu : λ R}, se tiene: s u (p + λu) = s u (p) + λs u (u) B (p, u) = p 2 = p = p + λ u Q (u) u λu ( λ + 2 B (p, u) Q (u) En consecuencia, s u transforma la intersección entre l y el elipsoide en si misma. Si p está en esta intersección y s u (p) p, éstos son los dos puntos en la intersección. En otro caso, si s u (p) = p de (5) se desprende que B (p, u) = 0 y los puntos en la intersección están dados por la ecuación: o bien, usando (4): Q (p + λu) = Q (p) ) u Q (p) + 2λB (p, u) + λ 2 Q (u) = Q (p) de donde el único valor posible es λ = 0. 9
8 Comentario 5 Las reflexiones definidas con la expresión en (5), son isometrías del elipsoide, es decir transformaciones lineales que dejan invariante al elipsoide. Las isometrías del elipsoide forman un grupo llamado el grupo ortogonal de la forma cuadrática Q. Es posible demostrar que las reflexiones generan este grupo. En estas notas, sólo hacemos notar que los puntos de intersección de una recta l con el elipsoide son permutados por la reflexión cuya raíz es paralela a l. Vamos a establecer el teorema de Frégier para un elipsoide como sigue: Teorema 6 Sea p un punto sobre un elipsoide en R n que está dado en término de las coordenadas cartesianas canónicas por la ecuación: Q (v) = k (k > 0) entonces,las variedades lineales generadas por s u1 (p),..., s un (p), donde u 1,..., u n es una base ortonormal de R n y s ui como en (5), concurren en un punto. Demostración. Mostraremos que para cualquier base ortonormal u 1,..., u n, el punto, p 2 p trb pertenece al subespacio generado por S u 1 (p),..., S un (p) donde p es como en (*). Si B es la forma bilineal asociada con Q, usaremos para notar la traza de B respecto de la base canónica. De las identidades se tiene s ui (p) = p 2 B (p, u i) Q (u i ) u i Q (u i ) s ui (p) = Q (u i ) p 2B (p, u i ) u i sumando sobre el índice i, resulta: ( ) Q (u i ) s ui (p) = Q (u i ) p 2 B (p, u i ) u i = p 2 B (p, u i ) u i 10
9 Luego: 1 Q (u i ) s ui (p) = p 2 B (p, u i ) u i = dp. (6) el punto dado en por la expresión del primer miembro en la igualdad precedente, es claramente un punto en la variedad lineal generada por s u1 (p),..., s un (p). Mientras que, en virtud de la Proposición 2, la expresión del segundo miembro puede ser escrita como: p 1 2B (p, u i ) u i = p p donde es el único punto en R n que satisface: 2B (p, v) = p, v ( v R n ) ( ) aquí, denota el producto interno canónico en R n. Si notamos con F (p) el punto en la variedad dado por la identidad en (6), se tiene: F (p) = p 2 p (7) donde resulta claro que F (p) no depende de la base u 1,..., u n. Comentario 7 Corresponde destacar que el punto F (p) se encuentra en la recta normal al elipsoide que pasa por p, ya que el hiperplano tangente está dado por : {v : B (p, v p) = 0} Por otra parte, notemos que F (p) dada en (7) es una transformación lineal, debido a que la aplicación p p es lineal. En el caso de una esfera la expresión de F está dada por la homotecia: ( F (p) = 1 2 ) p n y, como es sabido, si n = 2 F (p) es el centro de la circunferencia, cualquiera sea p. 11
10 Si una cuádrica está dada por la ecuación Q (v) = k donde Q es una forma cuadrática, el razonamiento relizado para el elipsoide puede ser reproducido en su totalidad con la condición Q (u i ) 0 y 0. Por ejemplo, en la hipérbola equilátera de ecuación x 2 y 2 = k, no sería posible darle sentido a F (p), sin embargo en el cono de ecuación x 2 + y 2 z 2 = 0, la expresión para F (p) está dada por: F (p 1, p 2, p 3 ) = (p 1, p 2, p 3 ) 2 (p 1, p 2, p 3 ) = ( p 1, p 2, 3p 3 ) En la esfera de ecuación x x2 n = r 2 con r > 0, la expresión es: ( F (p) = 1 2 ) p n El hecho que las cónicas se obtengan como secciones de un cono, en general, para un punto p en la cónica, eligiendo triedros donde un vector u es perpendicular al plano de la sección, la recta que pasa por F (p) y s u (p) cortará al plano de la sección en el punto de Frégier de la cónica asociado con p. 2. El caso general A continuación se extenderá la función F (p) al caso de una cuádrica C en R n de ecuación F (x) = k donde F (x) = Q (x) + L (x) siendo Q un forma cuadrática y L una forma lineal. Dado u R n y p C, la recta que pasa por p con dirección u corta a C en a lo sumo 2 puntos dados por los valores de λ en la ecuación F (p + λu) = F (p) o bien de donde Q (p + λu) + L (p + λu) = Q (p) + L (p) 2λB (p, u) + λ 2 Q (u) + λl (u) = 0 (8) 12
11 donde B denota la forma bilineal asociada con Q. El valor λ = 0 corresponde al punto p, y si Q (u) 0 se tiene 2B (p, u) + L (u) λ = Q (u) En este caso, el segundo punto p u en la intersección entre C y la recta p + λu está dado por 2B (p, u) + L (u) p u = p u (9) Q (u) En lo que sigue usaremos para indicar la traza de la forma bilineal B respecto de la base canónica. Conservando las notaciones precedentes, se tiene: Teorema 8 Sea p un punto en la cuádrica de ecuación: F (x) = Q (x) + L (x) Las variedades lineales generadas por los puntos p u1,..., p un según (9), donde u 1,..., u n es una base ortogonal de R n tal que Q (u i ) 0 (1 i n) y 0, son concurrentes. Demostración. Se tiene: de donde p ui = p 2B (p, u i) + L (u i ) u i Q (u i ) ( ) Q (u i ) p ui = Q (u i ) p = p (2B (p, u i ) + L (u i )) u i (2B (p, u i ) + L (u i )) u i Acorde con lo estrablecido en (1), la forma lineal 2B (p, v) + L (v) puede ser realizada como p, v, y en virtud de (2) resulta: Q (u i ) q i = p = p p p, u i u i 13
12 Finalmente tomamos el punto F (p) dado por: Por (3) n Q (u i) = F (p)= 1 Q (u i ) p ui = p p Comentario 9 La expresión para p en este caso involucra a la forma lineal L, tomando el mismo aspecto que en el caso del elipsoide tratado anteriormente. En coordenadas cartesianas, podemos expresar F en forma matricial como: F (x 1,..., x n ) = [x 1 x n ] B x 1. x n + [l 1 l n ] donde B = [B (e i, e j )], e 1,..., e n es la base canónica de R n y L (x 1,..., x n ) = l 1 x l n x n. Ahora, p está dado por: y consecuentemente: p = 2 [p 1 p n ] B + [l 1 l n ] F (p) = p 2 [p 1 p n ] B + [l 1 l n ] x 1. x n Referencias [1] Frégier s work appeared in Gergonne s Annales de Mathematique, t. VI, 1816, pp , pp ; and t. VII, 1816, pp [2] Katherine Lipps, Envelopes of Certain Family of Conics. PI MU Epsilon Journal, Vol. 2, Num. 8, [3] Sister Clotilde Spezia, Harmonic Points and Loci Connected with the Frégier s Theorem. Master s Thesis, St. Louis University,
Hipercuádricas afines. Clasificación. Elementos afines y euclídeos.
 Capítulo 6 Hipercuádricas afines. Clasificación. Elementos afines y euclídeos. Sea k un cuerpo de característica distinta de dos. Definición 6.0.1. Una hipercuádrica afín en k n es una ecuación de segundo
Capítulo 6 Hipercuádricas afines. Clasificación. Elementos afines y euclídeos. Sea k un cuerpo de característica distinta de dos. Definición 6.0.1. Una hipercuádrica afín en k n es una ecuación de segundo
Index. Ángulo, 80 entre dos planos, 80 entre dos rectas, 80 entre dos vectores, 59 entre recta y plano, 80
 Index Ángulo, 80 entre dos planos, 80 entre dos rectas, 80 entre dos vectores, 59 entre recta y plano, 80 Adjunto, 14 Aplicación, 2 bilineal, 47 biyectiva, 3 compuesta, 3 identidad, 3 inversa, 3 inyectiva,
Index Ángulo, 80 entre dos planos, 80 entre dos rectas, 80 entre dos vectores, 59 entre recta y plano, 80 Adjunto, 14 Aplicación, 2 bilineal, 47 biyectiva, 3 compuesta, 3 identidad, 3 inversa, 3 inyectiva,
Movimientos. Teorema de Cartan-Dieudonné. Semejanzas.
 Capítulo 5 Movimientos. Teorema de Cartan-Dieudonné. Semejanzas. 5.1 Isometrías y movimientos Partimos de un espacio euclídeo (X, V, +) y recordemos que una isometría de V es un elemento ϕ Gl(V ) que conserva
Capítulo 5 Movimientos. Teorema de Cartan-Dieudonné. Semejanzas. 5.1 Isometrías y movimientos Partimos de un espacio euclídeo (X, V, +) y recordemos que una isometría de V es un elemento ϕ Gl(V ) que conserva
CLASIFICACIÓN AFÍN DE CÓNICAS
 Álgebra lineal y Geometría I Gloria Serrano Sotelo Departamento de MATEMÁTICAS CLASIFICACIÓN AFÍN DE CÓNICAS Sea E un R-espacio vectorial de dimensión. Sean E = e 1, e un plano vectorial de E y e 0 un
Álgebra lineal y Geometría I Gloria Serrano Sotelo Departamento de MATEMÁTICAS CLASIFICACIÓN AFÍN DE CÓNICAS Sea E un R-espacio vectorial de dimensión. Sean E = e 1, e un plano vectorial de E y e 0 un
Hipercuádricas afines. Clasificación. Interpretación proyectiva de propiedades afines.
 Tema 8- Hipercuádricas afines Clasificación Interpretación proyectiva de propiedades afines 81 Hipercuádricas afines Sea k un cuerpo de característica distinta de dos Definición 811 Una hipercuádrica afín
Tema 8- Hipercuádricas afines Clasificación Interpretación proyectiva de propiedades afines 81 Hipercuádricas afines Sea k un cuerpo de característica distinta de dos Definición 811 Una hipercuádrica afín
UNIVERSIDAD COMPLUTENSE DE MADRID
 Principales conceptos que se tendrán en cuenta en la elaboración de las pruebas de Acceso a la Universidad para los estudiantes provenientes del Bachillerato LOGSE de la materia "Matemáticas II" ÁLGEBRA
Principales conceptos que se tendrán en cuenta en la elaboración de las pruebas de Acceso a la Universidad para los estudiantes provenientes del Bachillerato LOGSE de la materia "Matemáticas II" ÁLGEBRA
Problemas de Geometría Proyectiva
 Problemas de Geometría Proyectiva José M. Sánchez Abril José M. Rodríguez-Sanjurjo, Jesús M. Ruiz 1995 * I. VARIEDADES PROYECTIVAS Número 1. Se consideran en el plano proyectivo P 2 los cuatro puntos a
Problemas de Geometría Proyectiva José M. Sánchez Abril José M. Rodríguez-Sanjurjo, Jesús M. Ruiz 1995 * I. VARIEDADES PROYECTIVAS Número 1. Se consideran en el plano proyectivo P 2 los cuatro puntos a
El espacio proyectivo P n (k). Sistemas de referencia. Dualidad. Departamento de Algebra Septiembre El espacio proyectivo P n (k).
. Sistemas de referencia. Dualidad. Departamento de Algebra Septiembre El espacio proyectivo P n (k).") Notas de la asignatura AMPLIACIÓN DE GEOMETRÍA de la Licenciatura de Matemáticas, Facultad de Matemáticas, Universidad de Sevilla, para el curso 2000-01 Departamento de Algebra Septiembre 2000 Tema 1-
Notas de la asignatura AMPLIACIÓN DE GEOMETRÍA de la Licenciatura de Matemáticas, Facultad de Matemáticas, Universidad de Sevilla, para el curso 2000-01 Departamento de Algebra Septiembre 2000 Tema 1-
Interpretación proyectiva de propiedades euclídeas. Elementos
 Tema 9.- Interpretación proyectiva de propiedades euclídeas. Elementos de las cónicas y cuádricas euclídeas 9.1 El espacio euclídeo como subespacio del proyectivo. Consideramos el espacio euclídeo R n
Tema 9.- Interpretación proyectiva de propiedades euclídeas. Elementos de las cónicas y cuádricas euclídeas 9.1 El espacio euclídeo como subespacio del proyectivo. Consideramos el espacio euclídeo R n
G. SERRANO SOTELO. H = e 0 + E
 CLASIFICACIÓN AFÍN DE CÓNICAS Y CUÁDRICAS G. SERRANO SOTELO 1. Cuádricas en un hiperplano afín Sea E un R-espacio vectorial de dimensión n +1. Sean E = e 1,...,e n un hiperplano vectorial de E y e un vector
CLASIFICACIÓN AFÍN DE CÓNICAS Y CUÁDRICAS G. SERRANO SOTELO 1. Cuádricas en un hiperplano afín Sea E un R-espacio vectorial de dimensión n +1. Sean E = e 1,...,e n un hiperplano vectorial de E y e un vector
ALGEBRA. Escuela Politécnica Superior de Málaga
 ALGEBRA. Escuela Politécnica Superior de Málaga Tema 1. Espacios Vectoriales. Sistemas de ecuaciones. Espacio vectorial. Espacios vectoriales R n. Dependencia e independencia lineal. Base. Matrices y determinantes.
ALGEBRA. Escuela Politécnica Superior de Málaga Tema 1. Espacios Vectoriales. Sistemas de ecuaciones. Espacio vectorial. Espacios vectoriales R n. Dependencia e independencia lineal. Base. Matrices y determinantes.
SOLUCIONES. ÁLGEBRA LINEAL Y GEOMETRÍA (Examen Ordinario : ) Grado en Matemáticas Curso
 Grado en Matemáticas Curso") ÁLGEBRA LINEAL Y GEOMETRÍA Eamen Ordinario : 6--7 Grado en Matemáticas Curso 6-7 SOLUCIONES Dados tres puntos distintos alineados A, A, A A R, al número real r tal que A A = r A A lo llamaremos raón simple
ÁLGEBRA LINEAL Y GEOMETRÍA Eamen Ordinario : 6--7 Grado en Matemáticas Curso 6-7 SOLUCIONES Dados tres puntos distintos alineados A, A, A A R, al número real r tal que A A = r A A lo llamaremos raón simple
SEGUNDO PARCIAL - EJERCICIOS DE REPASO
 Algebra y Geometría 28 SEGUNDO PARCIAL - EJERCICIOS DE REPASO 3-6-8 ESPACIOS VECTORIALES. Construya en R 2 un subconjunto que sea: a cerrado para la suma y resta de vectores, pero no para la multiplicacion
Algebra y Geometría 28 SEGUNDO PARCIAL - EJERCICIOS DE REPASO 3-6-8 ESPACIOS VECTORIALES. Construya en R 2 un subconjunto que sea: a cerrado para la suma y resta de vectores, pero no para la multiplicacion
Hipercuádricas. Polaridad. Estudio geométrico de las cónicas y cuádricas
 Capítulo 4 Hipercuádricas. Polaridad. Estudio geométrico de las cónicas y cuádricas Comenzamos con el objeto básico de este curso. Hemos estudiado hasta ahora variedades lineales proyectivas, que están
Capítulo 4 Hipercuádricas. Polaridad. Estudio geométrico de las cónicas y cuádricas Comenzamos con el objeto básico de este curso. Hemos estudiado hasta ahora variedades lineales proyectivas, que están
ÁLGEBRA LINEAL II Práctica
 ÁLGEBRA LINEAL II Práctica 3.1-3.2 Geometría afín. (Curso 2012 2013) 1. En un espacio afín real de dimensión 3, se consideran dos sistemas de referencia R = O, ē 1, ē 2, ē 3 } y R = P, ū 1, ū 2, ū 3 },
ÁLGEBRA LINEAL II Práctica 3.1-3.2 Geometría afín. (Curso 2012 2013) 1. En un espacio afín real de dimensión 3, se consideran dos sistemas de referencia R = O, ē 1, ē 2, ē 3 } y R = P, ū 1, ū 2, ū 3 },
Parte II - Prácticas 8 a 9. Álgebra A 62 ÁLGEBRA A 62 (INGENIERÍA)
") Parte II - Prácticas 8 a 9 Álgebra A 62 Ingeniería 2015 CICLO BÁSICO COMÚN UBA ÁLGEBRA A 62 (INGENIERÍA) Práctica 8 Introducción a las transformaciones lineales Definiciones y propiedades Transformaciones
Parte II - Prácticas 8 a 9 Álgebra A 62 Ingeniería 2015 CICLO BÁSICO COMÚN UBA ÁLGEBRA A 62 (INGENIERÍA) Práctica 8 Introducción a las transformaciones lineales Definiciones y propiedades Transformaciones
ALGEBRA LINEAL Segundo Semestre. Parte II
 1 Universidad Nacional de La Plata Facultad de Ciencias Astronómicas y Geofísicas ALGEBRA LINEAL 2015 Segundo Semestre Parte II 2 1. Valores y Vectores propios. Diagonalización.Forma de Jordan. 1.1. Polinomios
1 Universidad Nacional de La Plata Facultad de Ciencias Astronómicas y Geofísicas ALGEBRA LINEAL 2015 Segundo Semestre Parte II 2 1. Valores y Vectores propios. Diagonalización.Forma de Jordan. 1.1. Polinomios
Tema 5: Espacios Eucĺıdeos.
 Espacios Euclídeos 1 Tema 5: Espacios Eucĺıdeos. 1. Producto escalar. Espacios eucĺıdeos. Definición. Sea E un R-espacio vectorial y sea f : E E R una forma bilineal simétrica. Se dice que f es un producto
Espacios Euclídeos 1 Tema 5: Espacios Eucĺıdeos. 1. Producto escalar. Espacios eucĺıdeos. Definición. Sea E un R-espacio vectorial y sea f : E E R una forma bilineal simétrica. Se dice que f es un producto
ÁLGEBRA LINEAL II Práctica 4.1
 ÁLGEBRA LINEAL II Práctica 4.1 Cónicas (Curso 2012 2013) NOTA: Todos los problemas se suponen planteados en el plano afín euclídeo dotado de un sistema cartesiano rectangular. 1. En el plano afín euclídeo
ÁLGEBRA LINEAL II Práctica 4.1 Cónicas (Curso 2012 2013) NOTA: Todos los problemas se suponen planteados en el plano afín euclídeo dotado de un sistema cartesiano rectangular. 1. En el plano afín euclídeo
Espacios vectoriales con producto interno
 Espacios vectoriales con producto interno Problemas teóricos En todos los problemas relacionados con el caso complejo se supone que el producto interno es lineal con respecto al segundo argumento. Definición
Espacios vectoriales con producto interno Problemas teóricos En todos los problemas relacionados con el caso complejo se supone que el producto interno es lineal con respecto al segundo argumento. Definición
ALGEBRA. Escuela Politécnica Superior de Málaga
 ALGEBRA. Escuela Politécnica Superior de Málaga Tema 1. Espacios Vectoriales. Sistemas de ecuaciones. Espacio vectorial. Espacios vectoriales R n. Dependencia e independencia lineal. Base. Matrices y determinantes.
ALGEBRA. Escuela Politécnica Superior de Málaga Tema 1. Espacios Vectoriales. Sistemas de ecuaciones. Espacio vectorial. Espacios vectoriales R n. Dependencia e independencia lineal. Base. Matrices y determinantes.
Departamento de Ingeniería Matemática - Universidad de Chile
 Ingeniería Matemática FACULTAD DE CIENCIAS FÍSICAS Y MATEMÁTICAS UNIVERSIDAD DE CHILE Álgebra Lineal 8-7 Formas cuadráticas SEMANA 4: FORMAS CUADRÁTICAS 7 Formas cuadráticas y matrices definidas positivas
Ingeniería Matemática FACULTAD DE CIENCIAS FÍSICAS Y MATEMÁTICAS UNIVERSIDAD DE CHILE Álgebra Lineal 8-7 Formas cuadráticas SEMANA 4: FORMAS CUADRÁTICAS 7 Formas cuadráticas y matrices definidas positivas
1 CÓNICAS Cónicas. Estudio particular. 1 x y. 1 x y. a 00 a 01 a 02 a 10 a 11 a 12 a 20 a 21 a 22
 CÓNICAS. CÓNICAS.. Cónicas. Estudio particular. Una cónica se dene como el lugar geométrico de los puntos del plano euclídeo que, respecto de una referencia cartesiana rectangular, satisfacen una ecuación
CÓNICAS. CÓNICAS.. Cónicas. Estudio particular. Una cónica se dene como el lugar geométrico de los puntos del plano euclídeo que, respecto de una referencia cartesiana rectangular, satisfacen una ecuación
ÁLGEBRA LINEAL II Práctica
 ÁLGEBRA LINEAL II Práctica 3.1-3.2 Geometría afín. (Curso 2013 2014) 1. En un espacio afín real de dimensión 3, se consideran dos sistemas de referencia R = O, ē 1, ē 2, ē 3 } y R = P, ū 1, ū 2, ū 3 },
ÁLGEBRA LINEAL II Práctica 3.1-3.2 Geometría afín. (Curso 2013 2014) 1. En un espacio afín real de dimensión 3, se consideran dos sistemas de referencia R = O, ē 1, ē 2, ē 3 } y R = P, ū 1, ū 2, ū 3 },
INDICE. 88 determinante 36. Familias de líneas rectas Resumen de resultados 96 Capitulo IV
 INDICE Geometría Analítica Plana Capitulo Primero Artículo 1. Introducción 1 2. Segmento rectilíneo dirigido 1 3. Sistema coordenado lineal 3 4. Sistema coordenado en el plano 5 5. Carácter de la geografía
INDICE Geometría Analítica Plana Capitulo Primero Artículo 1. Introducción 1 2. Segmento rectilíneo dirigido 1 3. Sistema coordenado lineal 3 4. Sistema coordenado en el plano 5 5. Carácter de la geografía
PROLOGO... vi 0 CONCEPTOS PRELIMINARES CONJUNTOS RELACIONES DE EQUIVALENCIA FUNCIONES EJERCICIOS...
 ÍNDICE PROLOGO... vi 0 CONCEPTOS PRELIMINARES... 1 0.1 CONJUNTOS... 3 0.2 RELACIONES DE EQUIVALENCIA... 6 0.3 FUNCIONES... 10 EJERCICIOS... 16 1 SISTEMAS DE ECUACIONES LINEALES Y MATRICES... 23 1. SISTEMAS
ÍNDICE PROLOGO... vi 0 CONCEPTOS PRELIMINARES... 1 0.1 CONJUNTOS... 3 0.2 RELACIONES DE EQUIVALENCIA... 6 0.3 FUNCIONES... 10 EJERCICIOS... 16 1 SISTEMAS DE ECUACIONES LINEALES Y MATRICES... 23 1. SISTEMAS
ÁLGEBRA LINEAL II Práctica 4.1
 ÁLGEBRA LINEAL II Práctica 4.1 Cónicas (Curso 2010 2011) NOTA: Todos los problemas se suponen planteados en el plano afín euclídeo dotado de un sistema cartesiano rectangular. 1. En el plano afín euclídeo
ÁLGEBRA LINEAL II Práctica 4.1 Cónicas (Curso 2010 2011) NOTA: Todos los problemas se suponen planteados en el plano afín euclídeo dotado de un sistema cartesiano rectangular. 1. En el plano afín euclídeo
2.5 Ejercicios... 59
 Índice General 1 Espacios vectoriales 1 1.1 Espacios vectoriales y subespacios......................... 1 1.1.1 Preliminares................................. 1 1.1.2 Espacios vectoriales.............................
Índice General 1 Espacios vectoriales 1 1.1 Espacios vectoriales y subespacios......................... 1 1.1.1 Preliminares................................. 1 1.1.2 Espacios vectoriales.............................
UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID. PRUEBAS DE ACCESO A ESTUDIOS UNIVERSITARIOS (LOGSE) MODELO DE EXAMEN (Curso )
 MODELO DE EXAMEN (Curso )") UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBAS DE ACCESO A ESTUDIOS UNIVERSITARIOS (LOGSE) MODELO DE EXAMEN (Curso 00-003) MATERIA: MATEMÁTICAS II INSTRUCCIONES GENERALES Y VALORACIÓN INSTRUCCIONES:
UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBAS DE ACCESO A ESTUDIOS UNIVERSITARIOS (LOGSE) MODELO DE EXAMEN (Curso 00-003) MATERIA: MATEMÁTICAS II INSTRUCCIONES GENERALES Y VALORACIÓN INSTRUCCIONES:
Semana 13: Determinación de cónicas. Haces de cónicas proyectivas.
 Semana 13: Determinación de cónicas. Haces de cónicas proyectivas. Sonia L. Rueda ETS Arquitectura. UPM Geometría afín y proyectiva, 2015 Geometría afín y proyectiva 1. Álgebra lineal 2. Geometría afín
Semana 13: Determinación de cónicas. Haces de cónicas proyectivas. Sonia L. Rueda ETS Arquitectura. UPM Geometría afín y proyectiva, 2015 Geometría afín y proyectiva 1. Álgebra lineal 2. Geometría afín
V = v 1 +2v 2 +3v 3. v 2. v 1
 Coordenadas Hay muchas maneras de darle coordenadas a los puntos del espacio, las ecuaciones de las curvas o superficies dependen de las coordenadas que utilicemos y eligiendo las coordenadas adecuadas
Coordenadas Hay muchas maneras de darle coordenadas a los puntos del espacio, las ecuaciones de las curvas o superficies dependen de las coordenadas que utilicemos y eligiendo las coordenadas adecuadas
Plan de Estudios Licenciatura en Ingeniería Mecatrónica Universidad Michoacana de San Nicolás de Hidalgo. Primer año
 PROGRAMAS DE ESTUDIO Primer año Álgebra Superior y Lineal Clave CB1M01 Horas teoría/semana 7 Horas práctica/semana 0 Duración semanas 32 Total de horas anuales 224 Número de créditos 14 Requisitos Ninguno
PROGRAMAS DE ESTUDIO Primer año Álgebra Superior y Lineal Clave CB1M01 Horas teoría/semana 7 Horas práctica/semana 0 Duración semanas 32 Total de horas anuales 224 Número de créditos 14 Requisitos Ninguno
NOTA: Todos los problemas se suponen planteados en el plano afín euclídeo dotado de un sistema cartesiano rectangular.
 ÁLGEBRA Práctica 15 Cónicas (Curso 2008 2009) NOTA: Todos los problemas se suponen planteados en el plano afín euclídeo dotado de un sistema cartesiano rectangular. 1. En el plano afín euclídeo y con respecto
ÁLGEBRA Práctica 15 Cónicas (Curso 2008 2009) NOTA: Todos los problemas se suponen planteados en el plano afín euclídeo dotado de un sistema cartesiano rectangular. 1. En el plano afín euclídeo y con respecto
Álgebra Lineal y Geometría I. Prueba 3. Grupo A. 12 de marzo de (
 Álgebra Lineal y Geometría I. Prueba 3. Grupo A. 2 de marzo de 208. Apellidos: Nombre: DNI: Ejercicio.-(4 puntos) Se considera la matriz siguiente: A = 2 0 3 0 2. Calcule W = null(a 2I), W 2 = null(a 4I)
Álgebra Lineal y Geometría I. Prueba 3. Grupo A. 2 de marzo de 208. Apellidos: Nombre: DNI: Ejercicio.-(4 puntos) Se considera la matriz siguiente: A = 2 0 3 0 2. Calcule W = null(a 2I), W 2 = null(a 4I)
Definición: Se llama pendiente de una recta a la tangente de un ángulo de inclinación formado por el eje X y la
 Geometría Analítica Preliminares Identidades Trigonométricas Definición: Se llama pendiente de una recta a la tangente de un ángulo de inclinación formado por el eje X y la recta, tal que, esto es Recta
Geometría Analítica Preliminares Identidades Trigonométricas Definición: Se llama pendiente de una recta a la tangente de un ángulo de inclinación formado por el eje X y la recta, tal que, esto es Recta
Formulario: Geometría Analítica
 Universidad Autónoma del Estado de México UAEM Facultad de Ingeniería Formulario: Geometría Analítica Elaborado por: Estudiante en Ingeniería en Electrónica Formulario Geometría Analítica 1. VECTORES EN
Universidad Autónoma del Estado de México UAEM Facultad de Ingeniería Formulario: Geometría Analítica Elaborado por: Estudiante en Ingeniería en Electrónica Formulario Geometría Analítica 1. VECTORES EN
Mas dimensiones U U-V
 Mas dimensiones Si R 2 ={(x,y) /x,y en R} y R 3 ={(x,y,z) / x,y,z R} son buenos modelos del plano y del espacio euclidianos, entonces parece razonable pensar que R 4 ={(x,y,z,w) / x,y,z,w R} debe ser un
Mas dimensiones Si R 2 ={(x,y) /x,y en R} y R 3 ={(x,y,z) / x,y,z R} son buenos modelos del plano y del espacio euclidianos, entonces parece razonable pensar que R 4 ={(x,y,z,w) / x,y,z,w R} debe ser un
INDICE. 88 determinante 36. Familias de líneas rectas Resumen de resultados 96
 INDICE Geometría Analítica Plana Capitulo Primero Sistema de Coordenadas Articulo 1. Introducción 1 2. Segmento rectilíneo dirigido 1 3. Sistema coordenado lineal 3 4. Sistema coordenado en el plano 5
INDICE Geometría Analítica Plana Capitulo Primero Sistema de Coordenadas Articulo 1. Introducción 1 2. Segmento rectilíneo dirigido 1 3. Sistema coordenado lineal 3 4. Sistema coordenado en el plano 5
ÁLGEBRA LINEAL II Práctica
 ÁLGEBRA LINEAL II Práctica 3.1-3.2 Geometría afín. (Curso 2015 2016) 1. En el espacio afín IR 3 se considera la referencia canónica R y la referencia R = (1, 0, 1); (1, 1, 0), (1, 1, 1), (1, 0, 0)}. Denotamos
ÁLGEBRA LINEAL II Práctica 3.1-3.2 Geometría afín. (Curso 2015 2016) 1. En el espacio afín IR 3 se considera la referencia canónica R y la referencia R = (1, 0, 1); (1, 1, 0), (1, 1, 1), (1, 0, 0)}. Denotamos
Material para el examen parcial 1
 Algebra Lineal 2, FAMAT-UG, aug-dic, 2009 Material para el examen parcial 1 (17 oct, 2009) Definiciones: Hay que saber las definiciones precisas de todos los siguientes términos, y conocer ejemplos concretos
Algebra Lineal 2, FAMAT-UG, aug-dic, 2009 Material para el examen parcial 1 (17 oct, 2009) Definiciones: Hay que saber las definiciones precisas de todos los siguientes términos, y conocer ejemplos concretos
Transformaciones Lineales y Espacio Dual
 Transformaciones Lineales y Espacio Dual Juan Pablo De Rasis 22 de abril de 2018 El presente artículo tiene como objetivo la exposición de soluciones a problemas de Álgebra Lineal concernientes a transformaciones
Transformaciones Lineales y Espacio Dual Juan Pablo De Rasis 22 de abril de 2018 El presente artículo tiene como objetivo la exposición de soluciones a problemas de Álgebra Lineal concernientes a transformaciones
Cónicas y cuádricas. Circunferencia Elipse Parábola Hipérbola
 Grado en Óptica y Optometría Curso 2009-2010 Cónicas y cuádricas. Curvas cónicas Entre las curvas, quizás más importante y con más renombre, figuran las conocidas como curvas cónicas, cuyo nombre proviene
Grado en Óptica y Optometría Curso 2009-2010 Cónicas y cuádricas. Curvas cónicas Entre las curvas, quizás más importante y con más renombre, figuran las conocidas como curvas cónicas, cuyo nombre proviene
ÁLGEBRA LINEAL II Práctica
 ÁLGEBRA LINEAL II Práctica 3.1-3.2 Geometría afín. (Curso 2016 2017) 1. En el espacio afín IR 3 se considera la referencia canónica R y la referencia R = {(1, 0, 1); (1, 1, 0), (1, 1, 1), (1, 0, 0)}. Denotamos
ÁLGEBRA LINEAL II Práctica 3.1-3.2 Geometría afín. (Curso 2016 2017) 1. En el espacio afín IR 3 se considera la referencia canónica R y la referencia R = {(1, 0, 1); (1, 1, 0), (1, 1, 1), (1, 0, 0)}. Denotamos
UTN FRBA Final de Álgebra y Geometría Analítica 21/05/2013. Apellido y nombre del alumno: Leg.:.. Corrigió: Revisó:...
 UTN FRBA Final de Álgebra y Geometría Analítica 1/05/01 Apellido y nombre del alumno: Leg.:.. Corrigió: Revisó:... La condición para aprobar esta evaluación es tener bien resueltos como mínimo tres ejercicios.
UTN FRBA Final de Álgebra y Geometría Analítica 1/05/01 Apellido y nombre del alumno: Leg.:.. Corrigió: Revisó:... La condición para aprobar esta evaluación es tener bien resueltos como mínimo tres ejercicios.
ÁLGEBRA Práctica Clasificar según los valores de λ IR las cónicas de los siguientes haces: 2. Para las siguientes cónicas
 ÁLGEBRA Práctica 14 Cónicas (Curso 2006 2007) NOTA: Todos los problemas se suponen planteados en el plano afín euclídeo dotado de un sistema cartesiano rectangular. 1. Clasificar según los valores de λ
ÁLGEBRA Práctica 14 Cónicas (Curso 2006 2007) NOTA: Todos los problemas se suponen planteados en el plano afín euclídeo dotado de un sistema cartesiano rectangular. 1. Clasificar según los valores de λ
1. Determina cuáles de los siguientes conjuntos son subespacios vectoriales. Para aquellos que lo sean, halla una base.
 EJERCICIOS PROPUESTOS 1. Espacios vectoriales. Sistemas de ecuaciones. 1. Determina cuáles de los siguientes conjuntos son subespacios vectoriales. Para aquellos que lo sean, halla una base. (a) S = {
EJERCICIOS PROPUESTOS 1. Espacios vectoriales. Sistemas de ecuaciones. 1. Determina cuáles de los siguientes conjuntos son subespacios vectoriales. Para aquellos que lo sean, halla una base. (a) S = {
NOTA: Todos los problemas se suponen planteados en el plano afín euclídeo dotado de un sistema cartesiano rectangular.
 ÁLGEBRA Práctica 14 Cónicas (Curso 2007 2008) NOTA: Todos los problemas se suponen planteados en el plano afín euclídeo dotado de un sistema cartesiano rectangular. 1. Para las siguientes cónicas (1) 5x
ÁLGEBRA Práctica 14 Cónicas (Curso 2007 2008) NOTA: Todos los problemas se suponen planteados en el plano afín euclídeo dotado de un sistema cartesiano rectangular. 1. Para las siguientes cónicas (1) 5x
El grupo lineal proyectivo. Homologías. Afinidades.
 Tema 3- El grupo lineal proyectivo Homologías Afinidades 31 El grupo lineal proyectivo Recordamos que en el tema anterior hemos definido, para una variedad lineal proyectiva L P n no vacía, el grupo lineal
Tema 3- El grupo lineal proyectivo Homologías Afinidades 31 El grupo lineal proyectivo Recordamos que en el tema anterior hemos definido, para una variedad lineal proyectiva L P n no vacía, el grupo lineal
Geometría afín y proyectiva, 2016 SEMANA 3
 Geometría afín y proyectiva, 2016 SEMANA 3 Sonia L. Rueda ETS Arquitectura. UPM September 20, 2016 Geometría afín y proyectiva 1. Álgebra Lineal 2. Geometría afín y eucĺıdea 3. Cónicas y cuádricas Álgebra
Geometría afín y proyectiva, 2016 SEMANA 3 Sonia L. Rueda ETS Arquitectura. UPM September 20, 2016 Geometría afín y proyectiva 1. Álgebra Lineal 2. Geometría afín y eucĺıdea 3. Cónicas y cuádricas Álgebra
MATEMÁTICAS I 2º EXAMEN PARCIAL 12 junio de 2009
 Sólo una respuesta a cada cuestión es correcta. Respuesta correcta: 0.2 puntos. Respuesta incorrecta: -0.1 puntos Respuesta en blanco: 0 puntos 1.- Un sistema generador G de R 3 : a) Está constituido por
Sólo una respuesta a cada cuestión es correcta. Respuesta correcta: 0.2 puntos. Respuesta incorrecta: -0.1 puntos Respuesta en blanco: 0 puntos 1.- Un sistema generador G de R 3 : a) Está constituido por
Guía docente de la asignatura
 Guía docente de la asignatura Asignatura Materia Álgebra y Geometría Lineales I Álgebra Lineal y Geometría Curso 2014 2015 Plan 394 Código 40000 Periodo de impartición Anual Tipo Básica Nivel/Ciclo Grado
Guía docente de la asignatura Asignatura Materia Álgebra y Geometría Lineales I Álgebra Lineal y Geometría Curso 2014 2015 Plan 394 Código 40000 Periodo de impartición Anual Tipo Básica Nivel/Ciclo Grado
Material para el examen final
 Algebra Lineal 2, FAMAT-UG, ene-jun, 2004 Material para el examen final 31 de mayo, 2004 Definiciones: Hay que saber las definiciones precisas de todos los siguientes términos, y conocer ejemplos concretos
Algebra Lineal 2, FAMAT-UG, ene-jun, 2004 Material para el examen final 31 de mayo, 2004 Definiciones: Hay que saber las definiciones precisas de todos los siguientes términos, y conocer ejemplos concretos
x, y = x 0 y 0 + x 1 y 1 + x 2 y 2 + x 3 y 3. Es fácil ver que verifica 1. Es simétrica. x, y = y, x para todo x, y R 4.
 1 Tema 2. Sección 1. Espacio vectorial de Minkowski. Manuel Gutiérrez. Departamento de Álgebra, Geometría y Topología. Universidad de Málaga. 29071-Málaga. Spain. Abril de 2010. En este capítulo se recordará
1 Tema 2. Sección 1. Espacio vectorial de Minkowski. Manuel Gutiérrez. Departamento de Álgebra, Geometría y Topología. Universidad de Málaga. 29071-Málaga. Spain. Abril de 2010. En este capítulo se recordará
NOTA: Todos los problemas se suponen planteados en el plano afín euclídeo dotado de un sistema cartesiano rectangular.
 ÁLGEBRA Práctica 15 Cónicas (Curso 2008 2009) NOTA: Todos los problemas se suponen planteados en el plano afín euclídeo dotado de un sistema cartesiano rectangular. 1. Para las siguientes cónicas (1) 5x
ÁLGEBRA Práctica 15 Cónicas (Curso 2008 2009) NOTA: Todos los problemas se suponen planteados en el plano afín euclídeo dotado de un sistema cartesiano rectangular. 1. Para las siguientes cónicas (1) 5x
UNIDAD TEMÁTICA Nº: 1
 Objetivos de la materia: Que el alumno: Aprecie el valor instrumental del álgebra y la geometría, relacionándolas con los demás espacios curriculares. Articule el registro algebraico con el del lenguaje
Objetivos de la materia: Que el alumno: Aprecie el valor instrumental del álgebra y la geometría, relacionándolas con los demás espacios curriculares. Articule el registro algebraico con el del lenguaje
Preliminares. 1.1 Acciones de Grupo
 Capítulo 1 Preliminares En este capítulo se presentan algunas definiciones y hechos fundamentales de la Teoría de Grupos y recordar nociones básicas de Álgebra Lineal. También se presentan algunos resultados
Capítulo 1 Preliminares En este capítulo se presentan algunas definiciones y hechos fundamentales de la Teoría de Grupos y recordar nociones básicas de Álgebra Lineal. También se presentan algunos resultados
Espacios vectoriales
 CAPíTULO 2 Espacios vectoriales 1. Definición de espacio vectorial Es frecuente representar ciertas magnitudes físicas (velocidad, fuerza,...) mediante segmentos orientados o vectores. Dados dos de tales
CAPíTULO 2 Espacios vectoriales 1. Definición de espacio vectorial Es frecuente representar ciertas magnitudes físicas (velocidad, fuerza,...) mediante segmentos orientados o vectores. Dados dos de tales
+ : X V X. (+) P : V X u P + u. (P + u) + v = P + (u + v). Nota La propiedad 1) de la definición anterior implica, en primer lugar, que
 P : V X u P + u. (P + u) + v = P + (u + v). Nota La propiedad 1) de la definición anterior implica, en primer lugar, que") Capítulo 1 El espacio afín 11 Introducción Dependencia lineal afín La Geometría afín sobre un cuerpo k tiene como objetos básicos los siguientes: un conjunto no vacío X, cuyos elementos serán llamados
Capítulo 1 El espacio afín 11 Introducción Dependencia lineal afín La Geometría afín sobre un cuerpo k tiene como objetos básicos los siguientes: un conjunto no vacío X, cuyos elementos serán llamados
Introducción a la Teoría de Códigos
 Introducción a la Teoría de Códigos M.A.García, L. Martínez, T.Ramírez Facultad de Ciencia y Tecnología. UPV/EHU Resumen Teórico Tema 1: PRELIMINARES SOBRE ÁLGEBRA LINEAL Mayo de 2017 Tema 1 Preliminares
Introducción a la Teoría de Códigos M.A.García, L. Martínez, T.Ramírez Facultad de Ciencia y Tecnología. UPV/EHU Resumen Teórico Tema 1: PRELIMINARES SOBRE ÁLGEBRA LINEAL Mayo de 2017 Tema 1 Preliminares
Segundo examen parcial. Soluciones. Ejercicio 1 (1 hora y 40 minutos.) 12 de junio de 2008
 12 de junio de 2008") ÁLGEBRA Segundo examen parcial Soluciones Ejercicio 1 (1 hora y 40 minutos 1 de junio de 008 1 En el espacio de matrices M n n (IR consideramos las formas bilineales: f : M n n (IR M n n (IR IR, f(a, B
ÁLGEBRA Segundo examen parcial Soluciones Ejercicio 1 (1 hora y 40 minutos 1 de junio de 008 1 En el espacio de matrices M n n (IR consideramos las formas bilineales: f : M n n (IR M n n (IR IR, f(a, B
Bioingeniería MATEMÁTICA I. Carreras. Programa Analítico y de Examen de la asignatura: Año: MSc. Ing. Dora A. Christian.
 FACULTAD DE INGENIERÍA Universidad Nacional de San Juan Carreras Bioingeniería Programa Analítico y de Examen de la asignatura: MATEMÁTICA I Año: 2014-... MSc. Ing. Dora A. Christian Profesora Titular...
FACULTAD DE INGENIERÍA Universidad Nacional de San Juan Carreras Bioingeniería Programa Analítico y de Examen de la asignatura: MATEMÁTICA I Año: 2014-... MSc. Ing. Dora A. Christian Profesora Titular...
Algebra Lineal y Geometría
 Algebra Lineal y Geometría Unidad n 11:Ecuación General de Segundo Grado en Tres Variables. Algebra Lineal y Geometría Esp.Liliana Eva Mata 1 Contenidos Superficies. Relaciones elementales entre propiedades
Algebra Lineal y Geometría Unidad n 11:Ecuación General de Segundo Grado en Tres Variables. Algebra Lineal y Geometría Esp.Liliana Eva Mata 1 Contenidos Superficies. Relaciones elementales entre propiedades
GEOMETRÍA. (x 1) 2 +(y 2) 2 =1. Razónalo. x y + z = 2. :3x 3z +1= 0 es doble de la distancia al plano π 2. : x + y 1= 0. Razónalo.
 2 +(y 2) 2 =1. Razónalo. x y + z = 2. :3x 3z +1= 0 es doble de la distancia al plano π 2. : x + y 1= 0. Razónalo.") GEOMETRÍA 1. (Junio, 1994) Sin resolver el sistema, determina si la recta x +3y +1= 0 es exterior, secante o tangente a la circunferencia (x 1) +(y ) =1. Razónalo.. (Junio, 1994) Dadas las ecuaciones de
GEOMETRÍA 1. (Junio, 1994) Sin resolver el sistema, determina si la recta x +3y +1= 0 es exterior, secante o tangente a la circunferencia (x 1) +(y ) =1. Razónalo.. (Junio, 1994) Dadas las ecuaciones de
Las variedades lineales en un K-espacio vectorial V pueden definirse como sigue a partir de los subespacios de V.
 Capítulo 9 Variedades lineales Al considerar los subespacios de R 2, vimos que éstos son el conjunto {(0, 0)}, el espacio R 2 y las rectas que pasan por el origen. Ahora, en algunos contextos, por ejemplo
Capítulo 9 Variedades lineales Al considerar los subespacios de R 2, vimos que éstos son el conjunto {(0, 0)}, el espacio R 2 y las rectas que pasan por el origen. Ahora, en algunos contextos, por ejemplo
LA CIRCUNFERENCIA. x y r. (x h) (y k) r. d(p; 0) x y r. d(p; C) (x h) (y k) r. Definición. Ecuación de la circunferencia. Geometría Analítica 3
 (y k) r. d(p; 0) x y r. d(p; C) (x h) (y k) r. Definición. Ecuación de la circunferencia. Geometría Analítica 3") Definición LA CIRCUNFERENCIA Se llama circunferencia a la sección cónica generada al cortar un cono recto con un plano perpendicular al eje del cono. La circunferencia es el lugar geométrico de todos los
Definición LA CIRCUNFERENCIA Se llama circunferencia a la sección cónica generada al cortar un cono recto con un plano perpendicular al eje del cono. La circunferencia es el lugar geométrico de todos los
1 Estudio local de curvas
 E.T.S. Arquitectura. Curvas y Super cies.1 1 Estudio local de curvas Sea una curva C R 3 con representación paramétrica regular ~r(t), t 2 I R, de clase mayor o igual a 3 y sea s = s(t) = Z t t 0 k~r 0
E.T.S. Arquitectura. Curvas y Super cies.1 1 Estudio local de curvas Sea una curva C R 3 con representación paramétrica regular ~r(t), t 2 I R, de clase mayor o igual a 3 y sea s = s(t) = Z t t 0 k~r 0
+ : X V X. (+) P : V X u P + u. (P + u) + v = P + (u + v). Nota La propiedad 1) de la definición anterior implica, en primer lugar, que
 P : V X u P + u. (P + u) + v = P + (u + v). Nota La propiedad 1) de la definición anterior implica, en primer lugar, que") Capítulo 1 El espacio afín 11 Introducción Dependencia lineal afín La Geometría afín sobre un cuerpo k tiene como objetos básicos los siguientes: un conjunto no vacío X, cuyos elementos serán llamados
Capítulo 1 El espacio afín 11 Introducción Dependencia lineal afín La Geometría afín sobre un cuerpo k tiene como objetos básicos los siguientes: un conjunto no vacío X, cuyos elementos serán llamados
Tema 3.3. Aplicaciones afines. Cónicas y cuádricas
 Tema 3.3. Aplicaciones afines. Cónicas y cuádricas Definición 1. Sean A = (P, V, f) y A = (P, V, f ) dos espacios afines tales que V y V son espacios vectoriales sobre un mismo cuerpo. Una función θ :
Tema 3.3. Aplicaciones afines. Cónicas y cuádricas Definición 1. Sean A = (P, V, f) y A = (P, V, f ) dos espacios afines tales que V y V son espacios vectoriales sobre un mismo cuerpo. Una función θ :
Matriz asociada a una transformación lineal respecto a un par de bases
 Matriz asociada a una transformación lineal respecto a un par de bases Ejercicios Objetivos Comprender cómo se describe una transformación lineal (que actúa en espacios vectoriales de dimensiones finitas)
Matriz asociada a una transformación lineal respecto a un par de bases Ejercicios Objetivos Comprender cómo se describe una transformación lineal (que actúa en espacios vectoriales de dimensiones finitas)
Universidad Nacional de Colombia Departamento de Matemáticas Álgebra Lineal - Grupo 5 Resumen Unidad n 3
 Universidad Nacional de Colombia Departamento de Matemáticas 1000003-5 Álgebra Lineal - Grupo 5 Resumen Unidad n 3 Vectores en R n Definición. El conjunto de las n-tuplas ordenadas de números reales se
Universidad Nacional de Colombia Departamento de Matemáticas 1000003-5 Álgebra Lineal - Grupo 5 Resumen Unidad n 3 Vectores en R n Definición. El conjunto de las n-tuplas ordenadas de números reales se
ap l i c a c i o n e s d e l a s
 Unidad 9 ap l i c a c i o n e s d e l a s transformaciones lineales Objetivos: Al inalizar la unidad, el alumno: Relacionará algunas transformaciones especiales con movimientos geométricos de vectores
Unidad 9 ap l i c a c i o n e s d e l a s transformaciones lineales Objetivos: Al inalizar la unidad, el alumno: Relacionará algunas transformaciones especiales con movimientos geométricos de vectores
Aquella que tiene nulos los elementos nos situados en la diagonal principal. Los elementos situados por encima de la diagonal principal son nulos.
 Álgebra lineal Matrices Rango de una matriz Orden del mayor menor complementario no nulo. Matriz regular det A Diagonal principal Elementos a ii de la matriz. Si la matriz es cuadrado son los elementos
Álgebra lineal Matrices Rango de una matriz Orden del mayor menor complementario no nulo. Matriz regular det A Diagonal principal Elementos a ii de la matriz. Si la matriz es cuadrado son los elementos
Capítulo V. Valores y vectores propios. Diagonalización de operadores lineales.
 Capítulo V Valores y vectores propios. Diagonalización de operadores lineales. Hemos visto que la aplicaciones lineales de en están definidas a través de una expresión de la forma ; pero esta fórmula puede
Capítulo V Valores y vectores propios. Diagonalización de operadores lineales. Hemos visto que la aplicaciones lineales de en están definidas a través de una expresión de la forma ; pero esta fórmula puede
UNIVERSIDAD COMPLUTENSE DE MADRID
 Principales conceptos que se tendrán en cuenta en la elaboración de las pruebas de Acceso a la Universidad para los estudiantes provenientes del Bachillerato LOGSE de la materia "Matemáticas II" ÁLGEBRA
Principales conceptos que se tendrán en cuenta en la elaboración de las pruebas de Acceso a la Universidad para los estudiantes provenientes del Bachillerato LOGSE de la materia "Matemáticas II" ÁLGEBRA
FINAL DE ÁLGEBRA Y GEOMETRÍA ANALÍTICA 30 mayo 2006 Tema 1
 FINAL DE ÁLGEBRA Y GEOMETRÍA ANALÍTICA 0 mayo 006 Tema Apellido y nombres:... 4 5 Calificación final ) Dadas las rectas : x y + z = r : r : ( x, y, z) = (,,) + λ(, ) x z + k = 0 k para que las rectas sean
FINAL DE ÁLGEBRA Y GEOMETRÍA ANALÍTICA 0 mayo 006 Tema Apellido y nombres:... 4 5 Calificación final ) Dadas las rectas : x y + z = r : r : ( x, y, z) = (,,) + λ(, ) x z + k = 0 k para que las rectas sean
Geometría afín y proyectiva, 2016 SEMANA 4
 Geometría afín y proyectiva, 2016 SEMANA 4 Sonia L. Rueda ETS Arquitectura. UPM September 30, 2016 Geometría afín y proyectiva 1. Álgebra Lineal 2. Geometría afín y eucĺıdea 3. Cónicas y cuádricas Álgebra
Geometría afín y proyectiva, 2016 SEMANA 4 Sonia L. Rueda ETS Arquitectura. UPM September 30, 2016 Geometría afín y proyectiva 1. Álgebra Lineal 2. Geometría afín y eucĺıdea 3. Cónicas y cuádricas Álgebra
UNIVERSIDAD CENTRAL DE VENEZUELA FACULTAD DE INGENIERÍA DEPARTAMENTO DE MATEMÁTICA APLICADA ÁLGEBRA LINEAL Y GEOMETRÍA ANALÍTICA
 UNIVERSIDAD CENTRAL DE VENEZUELA FACULTAD DE INGENIERÍA DEPARTAMENTO DE MATEMÁTICA APLICADA ÁLGEBRA LINEAL Y GEOMETRÍA ANALÍTICA SEMESTRE 1/2011 INFORMACIÓN GENERAL I. INFORMACIÓN CURRICULAR Código: 0250
UNIVERSIDAD CENTRAL DE VENEZUELA FACULTAD DE INGENIERÍA DEPARTAMENTO DE MATEMÁTICA APLICADA ÁLGEBRA LINEAL Y GEOMETRÍA ANALÍTICA SEMESTRE 1/2011 INFORMACIÓN GENERAL I. INFORMACIÓN CURRICULAR Código: 0250
UNIVERSIDAD DEL NORTE Departamento de Matemáticas y Estadística Álgebra Lineal Ejercicios resueltos- Mayo de 2018
 UNIVERSIDAD DEL NORTE Departamento de Matemáticas y Estadística Álgebra Lineal Ejercicios resueltos- Mayo de 2018 I. Sistemas homogéneos, subespacios, dependencia e independencia lineal 1. En cada caso
UNIVERSIDAD DEL NORTE Departamento de Matemáticas y Estadística Álgebra Lineal Ejercicios resueltos- Mayo de 2018 I. Sistemas homogéneos, subespacios, dependencia e independencia lineal 1. En cada caso
Respuestas faltantes en ejercicios edición 2007 Sección 4.4: Superficie cuadráticas de revolución Ejercicio 4-1
 Editorial Mc Graw Hill. Edición 007 Respuestas faltantes en ejercicios edición 007 Sección 4.4: Superficie cuadráticas de revolución Ejercicio 4- R r + x + y Ejercicio 4-3 + R x + y + z Ecuaciones: x +
Editorial Mc Graw Hill. Edición 007 Respuestas faltantes en ejercicios edición 007 Sección 4.4: Superficie cuadráticas de revolución Ejercicio 4- R r + x + y Ejercicio 4-3 + R x + y + z Ecuaciones: x +
Álgebra Lineal UCR. Sétimo tema, 2013
 Álgebra Lineal UCR Sétimo tema, 2013 Presentaciones basadas principalmente en Arce,C, Castillo,W y González, J. (2004) Álgebra lineal. Tercera edición. UCR. San Pedro. Otras fuentes serán mencionadas cuando
Álgebra Lineal UCR Sétimo tema, 2013 Presentaciones basadas principalmente en Arce,C, Castillo,W y González, J. (2004) Álgebra lineal. Tercera edición. UCR. San Pedro. Otras fuentes serán mencionadas cuando
Coordinación de Matemáticas III (MAT 023) x a. Además, diremos que f es continua en U si f es continua en cada punto de U.
 x a. Además, diremos que f es continua en U si f es continua en cada punto de U.") Coordinación de Matemáticas III (MAT 023) 1 er Semestre de 2013 Continuidad de Funciones en Varias Variables 1. Continuidad Definición 1.1. Sean U R n abierto, a U y f : U R una función real de varias
Coordinación de Matemáticas III (MAT 023) 1 er Semestre de 2013 Continuidad de Funciones en Varias Variables 1. Continuidad Definición 1.1. Sean U R n abierto, a U y f : U R una función real de varias
El espacio proyectivo. Sistemas de referencia. Dualidad.
 Capítulo 1 El espacio proyectivo Sistemas de referencia Dualidad En todo lo que sigue k designará un cuerpo arbitrario 11 Espacio afín como subespacio del proyectivo Definición 111 Sea un entero n 0 El
Capítulo 1 El espacio proyectivo Sistemas de referencia Dualidad En todo lo que sigue k designará un cuerpo arbitrario 11 Espacio afín como subespacio del proyectivo Definición 111 Sea un entero n 0 El
FACULTAD DE INGENIERIA CIVIL CARRERA DE INGENIERIA CIVIL ASIGNATURAS, CAPÍTULOS Y CONTENIDOS PARA EL CAN
 FACULTAD DE INGENIERIA CIVIL CARRERA DE INGENIERIA CIVIL ASIGNATURAS, CAPÍTULOS Y CONTENIDOS PARA EL CAN ASIGNATURA: MATEMÁTICAS (128 HORAS 16 SEMANAS) Componente 1: Lógica Matemática Componente 2: Algebra
FACULTAD DE INGENIERIA CIVIL CARRERA DE INGENIERIA CIVIL ASIGNATURAS, CAPÍTULOS Y CONTENIDOS PARA EL CAN ASIGNATURA: MATEMÁTICAS (128 HORAS 16 SEMANAS) Componente 1: Lógica Matemática Componente 2: Algebra
Geometría afín y proyectiva, 2016 SEMANA 2
 Geometría afín y proyectiva, 2016 SEMANA 2 Sonia L. Rueda ETS Arquitectura. UPM September 20, 2016 Geometría afín y proyectiva 1. Álgebra Lineal 2. Geometría afín y eucĺıdea 3. Cónicas y cuádricas Álgebra
Geometría afín y proyectiva, 2016 SEMANA 2 Sonia L. Rueda ETS Arquitectura. UPM September 20, 2016 Geometría afín y proyectiva 1. Álgebra Lineal 2. Geometría afín y eucĺıdea 3. Cónicas y cuádricas Álgebra
Contando con Sumas de Gauss
 Divulgaciones Matemáticas Vol. 1 No. (004), pp. 171 180 Contando con Sumas de Gauss Counting with Gauss Sums José O. Araujo (jaraujo@exa.unicen.edu.ar) Laura B. Fernández (lfernan@exa.unicen.edu.ar) Fac.
Divulgaciones Matemáticas Vol. 1 No. (004), pp. 171 180 Contando con Sumas de Gauss Counting with Gauss Sums José O. Araujo (jaraujo@exa.unicen.edu.ar) Laura B. Fernández (lfernan@exa.unicen.edu.ar) Fac.
Examen de Admisión a la Maestría / Doctorado 24 de Junio de 2016
 Examen de Admisión a la Maestría / Doctorado 4 de Junio de 6 Nombre: Instrucciones: En cada reactivo seleccione la respuesta correcta encerrando en un círculo la letra correspondiente. Puede hacer cálculos
Examen de Admisión a la Maestría / Doctorado 4 de Junio de 6 Nombre: Instrucciones: En cada reactivo seleccione la respuesta correcta encerrando en un círculo la letra correspondiente. Puede hacer cálculos
TÉCNICA SUPERIOR DE INGENIERÍA INFORMÁTICA
 ESCUELA ESTUDIOS DE TÉCNICA SUPERIOR DE INGENIERÍA INFORMÁTICA DEPARTAMENTO DE INGENIERÍA INFORMÁTICA MATEMÁTICA APLICADA I ÁLGERA LINEAL OLETINES DE PROLEMAS Curso 8-9 Sistemas de ecuaciones lineales.
ESCUELA ESTUDIOS DE TÉCNICA SUPERIOR DE INGENIERÍA INFORMÁTICA DEPARTAMENTO DE INGENIERÍA INFORMÁTICA MATEMÁTICA APLICADA I ÁLGERA LINEAL OLETINES DE PROLEMAS Curso 8-9 Sistemas de ecuaciones lineales.
Variedades diferenciables
 Capítulo 10 Variedades diferenciables 1. Variedades diferenciables en R n A grandes rasgos, una variedad diferenciable es un conjunto que, localmente, es difeomorfo al espacio euclideano. En este capítulo
Capítulo 10 Variedades diferenciables 1. Variedades diferenciables en R n A grandes rasgos, una variedad diferenciable es un conjunto que, localmente, es difeomorfo al espacio euclideano. En este capítulo
1 CUÁDRICAS Cuádricas. Estudio particular. 1 x y z. 1 x y z. a 00 a 01 a 02 a 03 a 10 a 11 a 12 a 13 a 20 a 21 a 22 a 23 a 30 a 31 a 32 a 33
 CUÁDRICAS. CUÁDRICAS.. Cuádricas. Estudio particular. Una cuádrica se dene como el lugar geométrico de los puntos del espacio euclídeo que, respecto de una referencia cartesiana rectangular, satisfacen
CUÁDRICAS. CUÁDRICAS.. Cuádricas. Estudio particular. Una cuádrica se dene como el lugar geométrico de los puntos del espacio euclídeo que, respecto de una referencia cartesiana rectangular, satisfacen
N o de examen: ESCRIBIR LAS RESPUESTAS AQUÍ Este examen consta de diez preguntas tipo verdadero/falso y diez ejercicios
 N o de examen: NOMBRE: C.I.: Examen de Geometría y Álgebra Lineal 1 22 de julio de 2014 Instituto de Matemática y Estadística Rafael Laguardia Facultad de Ingeniería ESCRIBIR LAS RESPUESTAS AQUÍ 1 2 3
N o de examen: NOMBRE: C.I.: Examen de Geometría y Álgebra Lineal 1 22 de julio de 2014 Instituto de Matemática y Estadística Rafael Laguardia Facultad de Ingeniería ESCRIBIR LAS RESPUESTAS AQUÍ 1 2 3
Solución de problemas III 1
 Solución de problemas III Álgebra II Curso 25-6. Espacio Afín.. Ejercicios Ejercicio.4.3 Encontrar la expresión analítica de las siguientes aplicaciones afines de R 2 : a Giro de centro (, ángulo π/2 b
Solución de problemas III Álgebra II Curso 25-6. Espacio Afín.. Ejercicios Ejercicio.4.3 Encontrar la expresión analítica de las siguientes aplicaciones afines de R 2 : a Giro de centro (, ángulo π/2 b
ÁLGEBRA LINEAL. EXAMEN EXTRAORDINARIO 5 de Julio de T (e 1 ) = e 1 e 2 + 2e 3 T (e 2 ) = e 1 + 2e 2 3e 3. [T (e 1 ) T (e 2 )] =
![ÁLGEBRA LINEAL. EXAMEN EXTRAORDINARIO 5 de Julio de T (e 1 ) = e 1 e 2 + 2e 3 T (e 2 ) = e 1 + 2e 2 3e 3. [T (e 1 ) T (e 2 )] =](/thumbs/82/86817902.jpg "ÁLGEBRA LINEAL. EXAMEN EXTRAORDINARIO 5 de Julio de T (e 1 ) = e 1 e 2 + 2e 3 T (e 2 ) = e 1 + 2e 2 3e 3. [T (e 1 ) T (e 2 )] =") ÁLGEBRA LINEAL EXAMEN EXTRAORDINARIO 5 de Julio de Apellidos y Nombre: Ejercicio. Sea T : R R 3 una transformación lineal definida como: T (e ) = e e + e 3 T (e ) = e + e 3e 3 donde {e, e }, {e, e, e 3}
ÁLGEBRA LINEAL EXAMEN EXTRAORDINARIO 5 de Julio de Apellidos y Nombre: Ejercicio. Sea T : R R 3 una transformación lineal definida como: T (e ) = e e + e 3 T (e ) = e + e 3e 3 donde {e, e }, {e, e, e 3}
ALGEBRA LINEAL Y GEOMETRÍA. REPASO DE ÁLGEBRA LINEAL-2: CAMBIOS DE BASE GRADO DE MATEMÁTICAS. CURSO
 ALGEBRA LINEAL Y GEOMETRÍA. REPASO DE ÁLGEBRA LINEAL-2: CAMBIOS DE BASE GRADO DE MATEMÁTICAS. CURSO 2012-2013 José García-Cuerva Universidad Autónoma de Madrid 11 de febrero de 2013 JOSÉ GARCÍA-CUERVA
ALGEBRA LINEAL Y GEOMETRÍA. REPASO DE ÁLGEBRA LINEAL-2: CAMBIOS DE BASE GRADO DE MATEMÁTICAS. CURSO 2012-2013 José García-Cuerva Universidad Autónoma de Madrid 11 de febrero de 2013 JOSÉ GARCÍA-CUERVA
6.1 Teorema de estructura de los módulos finitamente generados
 Tema 6.- Teorema de estructura de los módulos finitamente generados sobre un D.I.P.. Aplicaciones: ecuaciones lineales con coeficientes enteros, formas canónicas de Jordan 6.1 Teorema de estructura de
Tema 6.- Teorema de estructura de los módulos finitamente generados sobre un D.I.P.. Aplicaciones: ecuaciones lineales con coeficientes enteros, formas canónicas de Jordan 6.1 Teorema de estructura de
Guía. Álgebra II. Examen parcial III. Transformaciones lineales. Teoremas los más importantes cuyas demostraciones se pueden incluir en el examen
 Guía. Álgebra II. Examen parcial III. Transformaciones lineales. Teoremas los más importantes cuyas demostraciones se pueden incluir en el examen 1. Teorema de la representación matricial de una transformación
Guía. Álgebra II. Examen parcial III. Transformaciones lineales. Teoremas los más importantes cuyas demostraciones se pueden incluir en el examen 1. Teorema de la representación matricial de una transformación
Vectores y Valores Propios
 Capítulo 11 Vectores y Valores Propios Las ideas de vector y valor propio constituyen conceptos centrales del álgebra lineal y resultan una valiosa herramienta en la solución de numerosos problemas de
Capítulo 11 Vectores y Valores Propios Las ideas de vector y valor propio constituyen conceptos centrales del álgebra lineal y resultan una valiosa herramienta en la solución de numerosos problemas de
Universidad Nacional Autónoma de México Facultad de Ciencias Geometría Analítica II Tarea 1
 Universidad Nacional Autónoma de México Facultad de Ciencias Geometría Analítica II Tarea. Completa las igualdades usando el dibujo. γ β = α β = β + θ = θ + ε + ω = θ + ε = β + θ + ω = α + ε = β + δ =.
Universidad Nacional Autónoma de México Facultad de Ciencias Geometría Analítica II Tarea. Completa las igualdades usando el dibujo. γ β = α β = β + θ = θ + ε + ω = θ + ε = β + θ + ω = α + ε = β + δ =.
PRÁCTICO 5. Coordenadas y matriz de cambio de bases
 Algebra y Algebra II Segundo Cuatrimestre 2012 PRÁCTICO 5 Coordenadas y matriz de cambio de bases Ejercicio 1. Probar que los vectores α 1 = (1 0 i) α 2 = (1 + i 1 i 1) α 3 = (i i i) forman una base de
Algebra y Algebra II Segundo Cuatrimestre 2012 PRÁCTICO 5 Coordenadas y matriz de cambio de bases Ejercicio 1. Probar que los vectores α 1 = (1 0 i) α 2 = (1 + i 1 i 1) α 3 = (i i i) forman una base de