Técnicas de inteligencia artificial. Visión Artificial Reconocimiento de objetos
|
|
|
- Sebastián Giménez Núñez
- hace 7 años
- Vistas:
Transcripción
1 Técnicas de inteligencia artificial Visión Artificial Reconocimiento de objetos
2 Indice Introducción Reconocimiento mediante características PCA
3 Introducción El reconocimiento de objetos consiste en, dado algún conocimiento (forma, apariencia, etc.) sobre uno o varios objetos y una imagen, encontrar qué objetos están en la imagen y dónde El reconocimiento es un proceso difícil debido a: Presencia de otros objetos no modelados Cambio de iluminación Cambio de punto de vista del objeto Oclusión Escala


4 Ejemplos: reconociento facial Ampliamente extendido: cámaras, Picasa Se suele reconocer una posible posición en la imagen para una cara (mediante color de la piel, identificación de los ojos, etc.) y luego se reconoce la persona (con técnicas de aprendizaje)
5 Reconocimiento con características Imaginemos que tenemos una imagen de un objeto a reconocer (modelo) Extraemos, por ejemplo, las características SIFT de dicha imagen. El objeto ahora es representado por sus características SIFT Ahora tenemos una nueva imagen (escena) donde queremos buscar ese objeto Extraemos los SIFT de esta nueva imagen Encontramos las correspondencias entre las características del modelo y de la imagen

6 Reconoc. Características: emparejamiento Esto se puede hacer calculando la distancia euclídea del descriptor Para cada característica del modelo: Encontramos la característica de la escena cuya distancia euclídea esté por debajo de un cierto umbral Ahora tenemos una correspondencia entre los descriptores del modelo y de la escena
7 Reconocimiento características: transformación Ahora debemos encontrar la transformación entre el modelo y la escena Para simplificar, vamos a ver cómo se puede obtener la transformación 2D-2D afín: donde las variables m son los parámetros de rotación y escala y los t son los de traslación
8 Reconocimiento características: transformación Tenemos un sistema de varias ecuaciones con varias incógnitas, reescribimos la ecuación de arriba Cada emparejamiento introduce dos nuevas filas a la primera y última matriz. Nombramos las matrices como:
9 Reconocimiento características: transformación Tenemos un sistema de varias ecuaciones con varias incógnitas, reescribimos la ecuación de arriba Cada emparejamiento introduce dos nuevas filas a la primera y última matriz. Nombramos las matrices como:

10 Reconocimiento características: transformación Resolvemos el sistema anterior mediante mínimos cuadrados Consiste en encontrar la matriz x que minimiza el error cuadrático medio entre todos los emparejamientos Se resuelve este sistema:
11 Reconocimiento mediante PCA PCA (Principal Components Analysis): análisis de componentes principales Reduce la dimensionalidad de los datos de entrada Proyecta los datos de entrada en un subespacio Este subespacio está creado a partir de los autovectores de la matriz de covarianza de los datos de entrada
12 En qué consiste?
13 PCA Tenemos un conjunto de entrenamiento: (para el caso de imágenes, hacemos la imagen como un vector de una dimensión) Cada elemento es un vector: Calculamos la media de todo el conjunto de entrenamiento Centramos el conjunto de entrenamiento en el origen restándole la media a cada elemento

14 Entrenamiento Construimos una BD de imágenes intentando tener la máxima variabilidad y que el fondo no nos afecte
15 PCA Construimos una matriz donde cada columna es un elemento del conjunto de entrenamiento: Calculamos la matriz de covarianza: (matriz NxN, se obtiene el mismo resultado con XTX, matriz PxP, que suele ser de menor tamaño) La matriz de covarianza Q tiene P autovalores con sus correspondientes autovectores (pueden ser calculados mediante la descomposición SVD (Singular Value Decomposition))
16 PCA Los autovalores y autovectores crean un nuevo espacio (autoespacio, eigenspace) Cada elemento de entrada (imagen) se puede escribir en función de dichos autovectores (los elementos e son los autovectores y g son las coordenadas del elemento en el nuevo espacio):

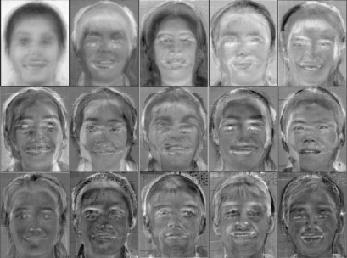
17 Valores medios y autovectores El resultado será una imagen media y las correspondientes imágenes para de cada autovector. Aquí se muestran ordenadas por su autovalor asociado
18 PCA Resumen del método: Calculamos imagen media Se resta la media a cada imagen Se construye la matriz de covarianza Se calculan los autovalores y autovectores de dicha matriz La clave de este método es que solo los mayores autovalores son importantes, es decir, podemos eliminar la información de los autovalores más pequeños
19 PCA Antes teníamos lo siguiente: Ahora, si tomamos solo los primero k autovalores y autovectores
20 PCA Para calcular las coordenadas de una imagen en el nuevo espacio
21 Reconocimiento Primero calculamos las coordenadas de todas las imágenes de entrenamiento en el nuevo espacio Dependiendo de la aplicación, el proceso de reconocimiento puede variar Dada una nueva imagen, calculamos sus coordenadas en el nuevo espacio Si se trata de varios objetos o clases distintas, encontramos a qué elemento (o cluster) del conjunto de entrenamiento se parece más (está más cerca)

22 Reconocimiento de caras
23 Aplicación: reconocimiento de gestos Objetivo: reconocer gestos Reconocen gestos con PCA y utilizan un autómata de estados finitos para reconocer el gesto

24 Autovectores de todo el conjunto
Visión artificial y Robótica. Depto. de Ciencia de la Computación e Inteligencia Artificial
 Visión artificial y Robótica Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Definición y clasificación Reconocimiento basado en la apariencia Bag of words Deep learning Parte
Visión artificial y Robótica Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Definición y clasificación Reconocimiento basado en la apariencia Bag of words Deep learning Parte
Álgebra Lineal - Grado de Estadística. Examen final 26 de junio de 2013 APELLIDOS, NOMBRE:
 Álgebra Lineal - Grado de Estadística Examen final de junio de APELLIDOS, NOMBRE: DNI: Firma Primer parcial Ejercicio ( Sea A una matriz simétrica definida positiva de orden n y v R n Pruebe que la matriz
Álgebra Lineal - Grado de Estadística Examen final de junio de APELLIDOS, NOMBRE: DNI: Firma Primer parcial Ejercicio ( Sea A una matriz simétrica definida positiva de orden n y v R n Pruebe que la matriz
Álgebra Lineal - Grado de Estadística. Examen final 27 de junio de 2014 APELLIDOS, NOMBRE:
 Álgebra Lineal - Grado de Estadística Examen final 7 de junio de 4 APELLIDOS, NOMBRE: DNI: irma Primer parcial Ejercicio Consideremos matrices A m m, B, C n n, Pruebe que bajo la hipótesis de que las inversas
Álgebra Lineal - Grado de Estadística Examen final 7 de junio de 4 APELLIDOS, NOMBRE: DNI: irma Primer parcial Ejercicio Consideremos matrices A m m, B, C n n, Pruebe que bajo la hipótesis de que las inversas
Matemáticas 2ºBachillerato Aplicadas a las Ciencias Sociales. Un sistema de ecuaciones lineales es un conjunto de ecuaciones lineales de la forma:
 Matemáticas 2ºBachillerato Aplicadas a las Ciencias Sociales 1era evaluación. Sistemas de Ecuaciones Lineales 1) SISTEMAS DE ECUACIONES LINEALES Un sistema de ecuaciones lineales es un conjunto de ecuaciones
Matemáticas 2ºBachillerato Aplicadas a las Ciencias Sociales 1era evaluación. Sistemas de Ecuaciones Lineales 1) SISTEMAS DE ECUACIONES LINEALES Un sistema de ecuaciones lineales es un conjunto de ecuaciones
Uso de LS. Esta matriz de 3x3 simétrica y definida positiva es un tensor de difusión de hidrógeno. , con gi en R 3. i S 0 exp bgt i Dg i i
 Uso de LS MX 2 min S, con gi en R 3 i S 0 exp bgt i Dg i i Esta matriz de 3x3 simétrica y definida positiva es un tensor de difusión de hidrógeno. En cada posición del cerebro tenemos una matriz Tractografía
Uso de LS MX 2 min S, con gi en R 3 i S 0 exp bgt i Dg i i Esta matriz de 3x3 simétrica y definida positiva es un tensor de difusión de hidrógeno. En cada posición del cerebro tenemos una matriz Tractografía
f(x, y, z, t) = (x + y t, x + 2y z 3t, 3x + 5y 2z 7t).
 = (x + y t, x + 2y z 3t, 3x + 5y 2z 7t).") Universidade de Vigo Departamento de Matemática Aplicada II E.T.S.I. Minas Álgebra Convocatoria de enero de 20 de enero de 20 (2.5 p.) ) Se considera la aplicación lineal f : R 4 R definida por: f(x y
Universidade de Vigo Departamento de Matemática Aplicada II E.T.S.I. Minas Álgebra Convocatoria de enero de 20 de enero de 20 (2.5 p.) ) Se considera la aplicación lineal f : R 4 R definida por: f(x y
Fundamentos Matemáticos de la Ingeniería. Tema 4: Diagonalización de matrices. Curso
 Fundamentos Matemáticos de la Ingeniería Tema 4 Hoja Escuela Técnica Superior de Ingeniería Civil e Industrial Esp en Hidrología Fundamentos Matemáticos de la Ingeniería Tema 4: Diagonaliación de matrices
Fundamentos Matemáticos de la Ingeniería Tema 4 Hoja Escuela Técnica Superior de Ingeniería Civil e Industrial Esp en Hidrología Fundamentos Matemáticos de la Ingeniería Tema 4: Diagonaliación de matrices
EXAMEN JUNIO PP 1A SEMANA
 EXAMEN JUNIO PP A SEMANA XAVI AZNAR Ejercicio. Defina semejanza, razón de semejanza y movimento asociado a una semejanza. Ejercicio. En el espacio vectorial V 3 (R) sea q la forma cuadrática cuya expresión
EXAMEN JUNIO PP A SEMANA XAVI AZNAR Ejercicio. Defina semejanza, razón de semejanza y movimento asociado a una semejanza. Ejercicio. En el espacio vectorial V 3 (R) sea q la forma cuadrática cuya expresión
6.8. Descomposición mediante valores singulares. v 2 =
 68 Descomposición mediante valores singulares Los valores singulares de una matriz m n Supongamos que A es una matriz real cualquiera Los autovalores de A T A tienen la siguiente propiedad A T Ax = λx
68 Descomposición mediante valores singulares Los valores singulares de una matriz m n Supongamos que A es una matriz real cualquiera Los autovalores de A T A tienen la siguiente propiedad A T Ax = λx
Tema 21. Exponencial de una matriz Formas canónicas de Jordan.
 Tema 21 Exponencial de una matriz En este tema vamos a definir y calcular la exponencial de una matriz cuadrada mediante una expresión formalmente análoga al desarrollo en serie de potencias de la exponencial
Tema 21 Exponencial de una matriz En este tema vamos a definir y calcular la exponencial de una matriz cuadrada mediante una expresión formalmente análoga al desarrollo en serie de potencias de la exponencial
ANÁLISIS DE COMPONENTES PRINCIPALES
 CAPÍTULO 4 ANÁLISIS DE COMPONENTES PRINCIPALES 4.1 Introducción Al investigar un fenómeno desconocido se pretende abordarlo con muestras de diferentes variables, en las cuales muchas veces existe una fuerte
CAPÍTULO 4 ANÁLISIS DE COMPONENTES PRINCIPALES 4.1 Introducción Al investigar un fenómeno desconocido se pretende abordarlo con muestras de diferentes variables, en las cuales muchas veces existe una fuerte
Estimación de homografías
 Estimación de homografías Visión en Robótica 1er cuatrimestre de 2013 1 Introducción del problema Una homografía es una transformación proyectiva que determina una correspondencia entre puntos El problema
Estimación de homografías Visión en Robótica 1er cuatrimestre de 2013 1 Introducción del problema Una homografía es una transformación proyectiva que determina una correspondencia entre puntos El problema
Aplicaciones Lineales. Diagonalización de matrices.
 Tema 2 Aplicaciones Lineales. Diagonalización de matrices. 2.1. Definiciones y propiedades Nota 2.1.1. En este tema trabajaremos con los Espacios Vectoriales R n y R m definidos sobre el cuerpo R. Definición
Tema 2 Aplicaciones Lineales. Diagonalización de matrices. 2.1. Definiciones y propiedades Nota 2.1.1. En este tema trabajaremos con los Espacios Vectoriales R n y R m definidos sobre el cuerpo R. Definición
Solución de problemas I 1
 Universidad Autónoma de Madrid Álgebra II. Físicas. Curso 5 6 Solución de problemas I Álgebra II Curso 5-6. Proyecciones en el producto escalar estándar Ejercicio 7.7. (a) Dada la ecuación x + y z, dar
Universidad Autónoma de Madrid Álgebra II. Físicas. Curso 5 6 Solución de problemas I Álgebra II Curso 5-6. Proyecciones en el producto escalar estándar Ejercicio 7.7. (a) Dada la ecuación x + y z, dar
Sesión 18: Diagonalización (I) Método práctico para diagonalizar una matriz cuadrada A M nxn K
 Método práctico para diagonalizar una matriz cuadrada A M nxn K") Sesión 8: Diagonalización (I) Método práctico para diagonalizar una matriz cuadrada A M nxn K ) Calculamos los valores propios de A y sus multiplicidades algebraicas con: d A λ = det A λi nxn = Si d A
Sesión 8: Diagonalización (I) Método práctico para diagonalizar una matriz cuadrada A M nxn K ) Calculamos los valores propios de A y sus multiplicidades algebraicas con: d A λ = det A λi nxn = Si d A
AUTOVALORES Y AUTOVECTORES EL AUTOVALOR
 Todos los derechos de propiedad intelectual de esta obra pertenecen en exclusiva a la Universidad Europea de Madrid, S.L.U. Queda terminantemente prohibida la reproducción, puesta a disposición del público
Todos los derechos de propiedad intelectual de esta obra pertenecen en exclusiva a la Universidad Europea de Madrid, S.L.U. Queda terminantemente prohibida la reproducción, puesta a disposición del público
TEMA III: DIAGONALIZACIÓN.
 TEMA III: DIAGONALIZACIÓN. OBJETIVOS: Generales: 1. Captar el motivo que justifica el problema de la diagonalización de endomorfismos. 2. Resolver y aplicar dicho problema cuando sea posible. Específicos:
TEMA III: DIAGONALIZACIÓN. OBJETIVOS: Generales: 1. Captar el motivo que justifica el problema de la diagonalización de endomorfismos. 2. Resolver y aplicar dicho problema cuando sea posible. Específicos:
Eigenvalores y eigenvectores
 Eigenvalores y eigenvectores Los dos problemas principales del álgebra lineal son: resolver sistemas lineales de la forma Ax = b y resolver el problema de eigenvalores. En general, una matriz actúa sobre
Eigenvalores y eigenvectores Los dos problemas principales del álgebra lineal son: resolver sistemas lineales de la forma Ax = b y resolver el problema de eigenvalores. En general, una matriz actúa sobre
PROPUESTA A. b) Para dicho valor de a, da la ecuación implícita de un plano que contenga a r y a s. (1 25 puntos)
 Para dicho valor de a, da la ecuación implícita de un plano que contenga a r y a s. (1 25 puntos)") PROPUESTA A 1A. a) Calcula los valores de los parámetros a, b R para que la función { sea continua y derivable en x = 0. (1 5 puntos) b) Para los valores encontrados, calcula la ecuación de la recta tangente
PROPUESTA A 1A. a) Calcula los valores de los parámetros a, b R para que la función { sea continua y derivable en x = 0. (1 5 puntos) b) Para los valores encontrados, calcula la ecuación de la recta tangente
PROPUESTA A. 3A. a) Despeja X en la ecuación matricial X A B = 2X donde A, B y X son matrices cuadradas
 Despeja X en la ecuación matricial X A B = 2X donde A, B y X son matrices cuadradas") PROPUESTA A 1A a) Calcula el valor de a R, a > 0, para que la función sea continua en x = 0. b) Calcula el límite 2A. Calcula las siguientes integrales (1 25 puntos por cada integral) Observación: El cambio
PROPUESTA A 1A a) Calcula el valor de a R, a > 0, para que la función sea continua en x = 0. b) Calcula el límite 2A. Calcula las siguientes integrales (1 25 puntos por cada integral) Observación: El cambio
Cónicas. Clasificación.
 Tema 7 Cónicas. Clasificación. Desde el punto de vista algebraico una cónica es una ecuación de segundo grado en las variables x, y. De ese modo, la ecuación general de una cónica viene dada por una expresión
Tema 7 Cónicas. Clasificación. Desde el punto de vista algebraico una cónica es una ecuación de segundo grado en las variables x, y. De ese modo, la ecuación general de una cónica viene dada por una expresión
Examen Final Ejercicio 2 (1 hora y 30 min.) 27 de mayo de 2011
 27 de mayo de 2011") Álgebra Lineal II Eamen Final Ejercicio 2 ( hora 30 min 27 de mao de 20 En el espacio afín euclideo usual consideramos una pirámide triangular ABCD de la cual sabemos: - A (0, 0, 0, B (, 0, 0, C (0,, -
Álgebra Lineal II Eamen Final Ejercicio 2 ( hora 30 min 27 de mao de 20 En el espacio afín euclideo usual consideramos una pirámide triangular ABCD de la cual sabemos: - A (0, 0, 0, B (, 0, 0, C (0,, -
FUNDAMENTOS MATEMÁTICOS (Grado en Ingeniería Informática) Práctica 8. SISTEMAS DE ECUACIONES LINEALES
 Práctica 8. SISTEMAS DE ECUACIONES LINEALES") FUNDAMENTOS MATEMÁTICOS (Grado en Ingeniería Informática) Práctica 8. SISTEMAS DE ECUACIONES LINEALES 1.- Discusión de sistemas lineales: Teorema de Rouché-Fröbenius. En este apartado trataremos la discusión
FUNDAMENTOS MATEMÁTICOS (Grado en Ingeniería Informática) Práctica 8. SISTEMAS DE ECUACIONES LINEALES 1.- Discusión de sistemas lineales: Teorema de Rouché-Fröbenius. En este apartado trataremos la discusión
6.14 Descomposición ortogonal y proyección ortogonal
 CAPÍTULO. ESPACIO EUCLÍDEO CANÓNICO IR N 282.14 Descomposición ortogonal y proyección ortogonal El resultado W W = IR n, significa que cada y IR n se puede escribir de forma única como suma de un vector
CAPÍTULO. ESPACIO EUCLÍDEO CANÓNICO IR N 282.14 Descomposición ortogonal y proyección ortogonal El resultado W W = IR n, significa que cada y IR n se puede escribir de forma única como suma de un vector
Álgebra Lineal. Tema 12. Mínimos cuadrados II. Grado en Ingeniería Informática Doble Grado en Ingeniería Informática y Administración de Empresas
 Álgebra Lineal Tema 2 Mínimos cuadrados II Grado en Ingeniería Informática Doble Grado en Ingeniería Informática y Administración de Empresas AUTORES: J S ALAS, A T ORRENTE Y EJS V ILLASEÑOR Índice general
Álgebra Lineal Tema 2 Mínimos cuadrados II Grado en Ingeniería Informática Doble Grado en Ingeniería Informática y Administración de Empresas AUTORES: J S ALAS, A T ORRENTE Y EJS V ILLASEÑOR Índice general
Clase 7 Herramientas de Álgebra Lineal
 Clase 7 Herramientas de Álgebra Lineal 1 Formas cuadráticas La descomposición en valores singulares 3 Normas de matrices 4 Ejercicios Dada una matriz M R n n, la función escalar x T Mx, donde x R n, es
Clase 7 Herramientas de Álgebra Lineal 1 Formas cuadráticas La descomposición en valores singulares 3 Normas de matrices 4 Ejercicios Dada una matriz M R n n, la función escalar x T Mx, donde x R n, es
Semana 11 Matrices y vectores - Sistemas de EDOs - Modelica. Elizabeth Villota Facultad de Ingeniería Mecánica Universidad Nacional de Ingeniería
 Matemáticas Aplicadas MA101 Semana 11 Matrices y vectores - Sistemas de EDOs - Modelica Elizabeth Villota Facultad de Ingeniería Mecánica Universidad Nacional de Ingeniería Matrices y vectores Sean dos
Matemáticas Aplicadas MA101 Semana 11 Matrices y vectores - Sistemas de EDOs - Modelica Elizabeth Villota Facultad de Ingeniería Mecánica Universidad Nacional de Ingeniería Matrices y vectores Sean dos
Estadística III Repaso de Algebra Lineal
 Repaso de Algebra Lineal Vectores Un vector columna de dimensión n 1 es una serie de números dispuestos como sigue: x 1 x 2 x =. x n Un vector fila de dimensión 1 p es una serie de números dispuestos como
Repaso de Algebra Lineal Vectores Un vector columna de dimensión n 1 es una serie de números dispuestos como sigue: x 1 x 2 x =. x n Un vector fila de dimensión 1 p es una serie de números dispuestos como
Se dice que una matriz cuadrada A es invertible, si existe una matriz B con la propiedad de que
 MATRICES INVERTIBLES Se dice que una matriz cuadrada A es invertible, si existe una matriz B con la propiedad de que AB = BA = I siendo I la matriz identidad. Denominamos a la matriz B la inversa de A
MATRICES INVERTIBLES Se dice que una matriz cuadrada A es invertible, si existe una matriz B con la propiedad de que AB = BA = I siendo I la matriz identidad. Denominamos a la matriz B la inversa de A
Denotamos a los elementos de la matriz A, de orden m x n, por su localización en la matriz de la
 MATRICES Una matri es un arreglo rectangular de números. Los números están ordenados en filas y columnas. Nombramos a las matrices para distinguirlas con una letra del alfabeto en mayúscula. Veamos un
MATRICES Una matri es un arreglo rectangular de números. Los números están ordenados en filas y columnas. Nombramos a las matrices para distinguirlas con una letra del alfabeto en mayúscula. Veamos un
Álgebra y Matemática Discreta
 Álgebra y Matemática Discreta Sesión de Teoría 18 (c) 2013 Leandro Marín, Francisco J. Vera, Gema M. Díaz 11 Nov 2013-17 Nov 2013 Ecuaciones Matriciales Ecuaciones Matriciales En muchas ocasiones, se plantean
Álgebra y Matemática Discreta Sesión de Teoría 18 (c) 2013 Leandro Marín, Francisco J. Vera, Gema M. Díaz 11 Nov 2013-17 Nov 2013 Ecuaciones Matriciales Ecuaciones Matriciales En muchas ocasiones, se plantean
Ejercicios resueltos del capítulo 4
 Ejercicios resueltos del capítulo 4 Ejercicios impares resueltos..a Calcular los autovalores y subespacios invariantes asociados a la matriz: A = Calculamos el polinomio característico y resolvemos: λ
Ejercicios resueltos del capítulo 4 Ejercicios impares resueltos..a Calcular los autovalores y subespacios invariantes asociados a la matriz: A = Calculamos el polinomio característico y resolvemos: λ
Análisis Factorial General.
 Capítulo 1 Análisis Factorial General. 1.1. Análisis Factorial General (AFG). Introducción. Sea una tabla rectangular de valores numéricos, representados por una matriz X n p, con términos x ij. Nos planteamos
Capítulo 1 Análisis Factorial General. 1.1. Análisis Factorial General (AFG). Introducción. Sea una tabla rectangular de valores numéricos, representados por una matriz X n p, con términos x ij. Nos planteamos
2.1. ESTIMACIÓN DE PARÁMETROS BASADO EN LA SENSIBILIDAD.
 ACTUALIZACIÓN DE UN MODELO NUMÉRICO DE LA PASARELA DE LA CARTUJA A PARTIR DE DATOS EXPERIMENTALES. MODAL UPDATING. RESEÑA TEÓRICA El objetivo del modal updating es ajustar los valores de los parámetros
ACTUALIZACIÓN DE UN MODELO NUMÉRICO DE LA PASARELA DE LA CARTUJA A PARTIR DE DATOS EXPERIMENTALES. MODAL UPDATING. RESEÑA TEÓRICA El objetivo del modal updating es ajustar los valores de los parámetros
Interfaz hombre máquina basado en el análisis de los gestos faciales mediante visión artificial
 UNIVERSIDAD DE ALCALÁ Escuela Politécnica Superior INGENIERÍA DE TELECOMUNICACIÓN Interfaz hombre máquina basado en el análisis de los gestos faciales mediante visión artificial Proyecto Fin de Carrera
UNIVERSIDAD DE ALCALÁ Escuela Politécnica Superior INGENIERÍA DE TELECOMUNICACIÓN Interfaz hombre máquina basado en el análisis de los gestos faciales mediante visión artificial Proyecto Fin de Carrera
Álgebra lineal. Noviembre 2018
 Álgebra lineal. Noviembre 08 Opción A Ejercicio. (Puntuación máxima:,5 puntos) Sea el siguiente sistema de ecuaciones lineales: 4ax + 4ay + z = a ax + y az = a, se pide: 4ax + 4ay + az = 4 (,5 puntos)
Álgebra lineal. Noviembre 08 Opción A Ejercicio. (Puntuación máxima:,5 puntos) Sea el siguiente sistema de ecuaciones lineales: 4ax + 4ay + z = a ax + y az = a, se pide: 4ax + 4ay + az = 4 (,5 puntos)
Matemáticas I Grado de Administración y Dirección de Empresas Examen de Febrero Curso 2011/ ?
 Matemáticas I Grado de Administración y Dirección de Empresas Examen de Febrero Curso 011/1 1) (1 punto) Dado el subespacio vectorial,,,,,,,,,,, a) Obtener la dimensión, unas ecuaciones implícitas, unas
Matemáticas I Grado de Administración y Dirección de Empresas Examen de Febrero Curso 011/1 1) (1 punto) Dado el subespacio vectorial,,,,,,,,,,, a) Obtener la dimensión, unas ecuaciones implícitas, unas
ÁLGEBRA LINEAL. EXAMEN FINAL 18 de Enero de b) (0, 5 puntos) Estudia si la siguiente afirmación es verdadera o falsa, justificando
 (0, 5 puntos) Estudia si la siguiente afirmación es verdadera o falsa, justificando") ÁLGEBRA LINEAL EXAMEN FINAL 8 de Enero de Apellidos y Nombre: Duración del examen: 3 horas Publicación de notas: enero Revisión de Examen: feb Ejercicio. ( puntos a (, puntos Estudia si la siguiente afirmación
ÁLGEBRA LINEAL EXAMEN FINAL 8 de Enero de Apellidos y Nombre: Duración del examen: 3 horas Publicación de notas: enero Revisión de Examen: feb Ejercicio. ( puntos a (, puntos Estudia si la siguiente afirmación
M a t e m á t i c a s I I 1
 Matemáticas II Matemáticas II 2 CANTABRIA CNVCATRIA SEPTIEMBRE 2009 SLUCIÓN DE LA PRUEBA DE ACCES AUTR: José Luis Pérez Sanz Bloque I A a) El rango de la matriz de los coeficientes será 3 siempre que el
Matemáticas II Matemáticas II 2 CANTABRIA CNVCATRIA SEPTIEMBRE 2009 SLUCIÓN DE LA PRUEBA DE ACCES AUTR: José Luis Pérez Sanz Bloque I A a) El rango de la matriz de los coeficientes será 3 siempre que el
Análisis de componentes principales. a.k.a.: PCA Principal components analysis
 Análisis de componentes principales a.k.a.: PCA Principal components analysis 1 Outline Motivación Derivación Ejemplos 2 Motivación general Tenemos un dataset X con n datos y p dimensiones, centrado (medias
Análisis de componentes principales a.k.a.: PCA Principal components analysis 1 Outline Motivación Derivación Ejemplos 2 Motivación general Tenemos un dataset X con n datos y p dimensiones, centrado (medias
Capítulo 5. Escalado Multidimensional 5.1. ESCALADO MÉTRICO
 Capítulo 5 Escalado Multidimensional 5.1. ESCALADO MÉTRICO Dada una matriz de distancias D = (d ij ) o de disimilaridades = (δ ij ) entre n objetos, el escalado métrico consiste en encontrar las coordenadas
Capítulo 5 Escalado Multidimensional 5.1. ESCALADO MÉTRICO Dada una matriz de distancias D = (d ij ) o de disimilaridades = (δ ij ) entre n objetos, el escalado métrico consiste en encontrar las coordenadas
Estéreo dinámico. Estéreo dinámico
 Estéreo dinámico 1 Vectores locales de desplazamiento Dada una secuencia de imagenes Tomadas a intervalos Movimiento absoluto: movimiento independiente de la cámara Movimiento relativo: movimiento debido
Estéreo dinámico 1 Vectores locales de desplazamiento Dada una secuencia de imagenes Tomadas a intervalos Movimiento absoluto: movimiento independiente de la cámara Movimiento relativo: movimiento debido
1. ESPACIO EUCLÍDEO. ISOMETRÍAS
 . ESPACIO EUCLÍDEO. ISOMETRÍAS. En el espacio euclídeo usual R 4 se consideran los subespacios vectoriales y W = {(x, y, z, t R 4 : x y =, z + t = } Hallar: W 2 = L{(,, 2, 2, (,,, } a Las ecuaciones de
. ESPACIO EUCLÍDEO. ISOMETRÍAS. En el espacio euclídeo usual R 4 se consideran los subespacios vectoriales y W = {(x, y, z, t R 4 : x y =, z + t = } Hallar: W 2 = L{(,, 2, 2, (,,, } a Las ecuaciones de
Diagonalización de matrices.
 Diagonalización de matrices. 1. Diagonalización de matrices. Definición 1.1 Sea A una matriz cuadrada,, decimos que es un autovalor de A si existe un vector no nulo tal que En esta situación decimos que
Diagonalización de matrices. 1. Diagonalización de matrices. Definición 1.1 Sea A una matriz cuadrada,, decimos que es un autovalor de A si existe un vector no nulo tal que En esta situación decimos que
2. Formas cuadráticas. Expresiones diagonales. Clasificación respecto a su signo.
 2. Formas cuadráticas. Expresiones diagonales. Clasificación respecto a su signo. 2.1 Formas cuadráticas. Expresión matricial y analítica. Expresiones diagonales. Definición 2.1 (Expresión matricial) Una
2. Formas cuadráticas. Expresiones diagonales. Clasificación respecto a su signo. 2.1 Formas cuadráticas. Expresión matricial y analítica. Expresiones diagonales. Definición 2.1 (Expresión matricial) Una
Algunos Tipos de matrices. Matrices. Algunos Tipos de matrices. Algunos Tipos de matrices
 Matrices Una matriz de orden m n es un conjunto ordenado de m n números reales dispuestos en m filas y n columnas de la forma: A = a 11 a 12 a 1j a 1n a 21 a 22 a 2j a 2n a i1 a i2 a ij a in a m1 a m2
Matrices Una matriz de orden m n es un conjunto ordenado de m n números reales dispuestos en m filas y n columnas de la forma: A = a 11 a 12 a 1j a 1n a 21 a 22 a 2j a 2n a i1 a i2 a ij a in a m1 a m2
Visión artificial y Robótica Geometría. Depto. de Ciencia de la Computación e Inteligencia Artificial
 Visión artificial y Robótica Geometría Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Geometría 2D y 3D Transformación de coordenadas Calibración de la cámara Álgebra necesaria
Visión artificial y Robótica Geometría Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Geometría 2D y 3D Transformación de coordenadas Calibración de la cámara Álgebra necesaria
CÓNICAS. 1. Dada la cónica x 2 + 2xy y 2 2x 2y + 4 = 0, se pide su clasicación y los elementos característicos de la misma. = 1
 CÓNICAS. Dada la cónica x + x x + 4, se pide su clasicación los elementos característicos de la misma. A 4 A Se tiene A 6 A, de modo que la cónica es una hipérbola. Calculemos su centro. A c c Resolviendo
CÓNICAS. Dada la cónica x + x x + 4, se pide su clasicación los elementos característicos de la misma. A 4 A Se tiene A 6 A, de modo que la cónica es una hipérbola. Calculemos su centro. A c c Resolviendo
0 a b X = b c 0. f X (A) = AX XA.
 = AX XA.") Universidade de Vigo Departamento de Matemática Aplicada II E.T.S.I. Industriales Álgebra Lineal Convocatoria de Junio 8 de Junio de 2007 (3 ptos.). Sea V = {A M 3 3 (R) / A t = A}. (a) Demostrar que toda
Universidade de Vigo Departamento de Matemática Aplicada II E.T.S.I. Industriales Álgebra Lineal Convocatoria de Junio 8 de Junio de 2007 (3 ptos.). Sea V = {A M 3 3 (R) / A t = A}. (a) Demostrar que toda
M a t e m á t i c a s I I 1
 Matemáticas II Matemáticas II PRINCIPADO DE ASTURIAS MODELO CURSO 009-00 SOLUCIÓN DE LA PRUEBA DE ACCESO AUTOR: José Luis Pérez Sanz Opción A Ejercicio a) Como se trata de un sistema cuadrado, calculamos
Matemáticas II Matemáticas II PRINCIPADO DE ASTURIAS MODELO CURSO 009-00 SOLUCIÓN DE LA PRUEBA DE ACCESO AUTOR: José Luis Pérez Sanz Opción A Ejercicio a) Como se trata de un sistema cuadrado, calculamos
Fundamentos matemáticos básicos de la realidad virtual
 Fundamentos matemáticos básicos de la realidad virtual José Ignacio Ronda Prieto Grupo de Tratamiento de Imágenes, ETSIT, UPM jir@gti.ssr.upm.es Fundamentos matemáticos básicos de la realidad virtual 1
Fundamentos matemáticos básicos de la realidad virtual José Ignacio Ronda Prieto Grupo de Tratamiento de Imágenes, ETSIT, UPM jir@gti.ssr.upm.es Fundamentos matemáticos básicos de la realidad virtual 1
Tema 6: Autovalores y autovectores
 Tema 6: Autovalores y autovectores Curso 216/217 Ruzica Jevtic Universidad San Pablo CEU Madrid Referencias Lay D. Linear algebra and its applications (3rd ed). Chapter 5. 2 Autovalores y autovectores
Tema 6: Autovalores y autovectores Curso 216/217 Ruzica Jevtic Universidad San Pablo CEU Madrid Referencias Lay D. Linear algebra and its applications (3rd ed). Chapter 5. 2 Autovalores y autovectores
Matrices y sistemas de ecuaciones lineales. Autovalores y autovectores.
 Tema 5 Matrices y sistemas de ecuaciones lineales Autovalores y autovectores 5 Introducción Una matriz es una disposición ordenada de elementos de la forma: a a a m a a a m a n a n a nm Sus filas son las
Tema 5 Matrices y sistemas de ecuaciones lineales Autovalores y autovectores 5 Introducción Una matriz es una disposición ordenada de elementos de la forma: a a a m a a a m a n a n a nm Sus filas son las
PROGRAMA ANALÍTICO DE LA ASIGNATURA ALGEBRA II
 PROGRAMA ANALÍTICO DE LA ASIGNATURA 1. IDENTIFICACION ALGEBRA II Asignatura ÁLGEBRA II Código de asignatura(sigla) MAT 103 Semestre 2 Prerrequisitos INF 119 ó MAT 100 Horas semanal (HS) HT 4 HP 2 LAB 2
PROGRAMA ANALÍTICO DE LA ASIGNATURA 1. IDENTIFICACION ALGEBRA II Asignatura ÁLGEBRA II Código de asignatura(sigla) MAT 103 Semestre 2 Prerrequisitos INF 119 ó MAT 100 Horas semanal (HS) HT 4 HP 2 LAB 2
C/ Fernando Poo 5 Madrid (Metro Delicias o Embajadores).
.") UNIVERSIDAD REY JUAN CARLOS, MADRID PRUEBA DE ACCESO PARA MAYORES DE 25 AÑOS MATEMÁTICAS II AÑO 2010 OPCIÓN A Ejercicio 1 a) (1 punto) Hallar los valores del parámetro para los que la siguiente matriz
UNIVERSIDAD REY JUAN CARLOS, MADRID PRUEBA DE ACCESO PARA MAYORES DE 25 AÑOS MATEMÁTICAS II AÑO 2010 OPCIÓN A Ejercicio 1 a) (1 punto) Hallar los valores del parámetro para los que la siguiente matriz
PROBLEMAS DE ÁLGEBRA LINEAL INGENIERÍA DE TELECOMUNICACIONES - E.T.S.I.T. CURSO 2005/06
 PROBLEMAS DE ÁLGEBRA LINEAL INGENIERÍA DE TELECOMUNICACIONES - E.T.S.I.T. CURSO 200/06 1. Utilizar el método de eliminación de Gauss para resolver el sistema de ecuaciones lineales siguiente: 2 x 1 2 x
PROBLEMAS DE ÁLGEBRA LINEAL INGENIERÍA DE TELECOMUNICACIONES - E.T.S.I.T. CURSO 200/06 1. Utilizar el método de eliminación de Gauss para resolver el sistema de ecuaciones lineales siguiente: 2 x 1 2 x
SOLUCIONES. ÁLGEBRA LINEAL Y GEOMETRÍA (Examen Ordinario : ) Grado en Matemáticas Curso
 Grado en Matemáticas Curso") ÁLGEBRA LINEAL Y GEOMETRÍA Eamen Ordinario : 6--7 Grado en Matemáticas Curso 6-7 SOLUCIONES Dados tres puntos distintos alineados A, A, A A R, al número real r tal que A A = r A A lo llamaremos raón simple
ÁLGEBRA LINEAL Y GEOMETRÍA Eamen Ordinario : 6--7 Grado en Matemáticas Curso 6-7 SOLUCIONES Dados tres puntos distintos alineados A, A, A A R, al número real r tal que A A = r A A lo llamaremos raón simple
Solución de problemas III 1
 Solución de problemas III Álgebra II Curso 25-6. Espacio Afín.. Ejercicios Ejercicio.4.3 Encontrar la expresión analítica de las siguientes aplicaciones afines de R 2 : a Giro de centro (, ángulo π/2 b
Solución de problemas III Álgebra II Curso 25-6. Espacio Afín.. Ejercicios Ejercicio.4.3 Encontrar la expresión analítica de las siguientes aplicaciones afines de R 2 : a Giro de centro (, ángulo π/2 b
Algoritmo de factorización LU
 Algoritmo de factorización LU Objetivos. Estudiar el algoritmo de la factorización LU de una matriz cuadrada invertible. Requisitos. Matrices elementales y su relación con operaciones elementales, matriz
Algoritmo de factorización LU Objetivos. Estudiar el algoritmo de la factorización LU de una matriz cuadrada invertible. Requisitos. Matrices elementales y su relación con operaciones elementales, matriz
Soluciones a los ejercicios del examen final C =. 1 0
 Universidade de Vigo Departamento de Matemática Aplicada II E T S E de Minas Álgebra Lineal Curso 205/6 de enero de 206 Soluciones a los ejercicios del examen final Se considera el subespacio U {X M 2
Universidade de Vigo Departamento de Matemática Aplicada II E T S E de Minas Álgebra Lineal Curso 205/6 de enero de 206 Soluciones a los ejercicios del examen final Se considera el subespacio U {X M 2
Esta expresión polinómica puede expresarse como una expresión matricial de la forma; a 11 a 12 a 1n x 1 x 2 q(x 1, x 2,, x n ) = (x 1, x 2,, x n )
 = (x 1, x 2,, x n )") Tema 3 Formas cuadráticas. 3.1. Definición y expresión matricial Definición 3.1.1. Una forma cuadrática sobre R es una aplicación q : R n R que a cada vector x = (x 1, x 2,, x n ) R n le hace corresponder
Tema 3 Formas cuadráticas. 3.1. Definición y expresión matricial Definición 3.1.1. Una forma cuadrática sobre R es una aplicación q : R n R que a cada vector x = (x 1, x 2,, x n ) R n le hace corresponder
DETERMINANTES. 2. Resuelve el siguiente determinante aplicando la regla de Sarrus:
 DETERMINNTES. Calcula el determinante de la siguiente matriz: 3 4 3 0..(3.0 2.0).0 0 0 3 4 0 0 3 Hemos sumado a la segunda fila la primera cambiada de signo. continuación hemos sumado a la tercera fila
DETERMINNTES. Calcula el determinante de la siguiente matriz: 3 4 3 0..(3.0 2.0).0 0 0 3 4 0 0 3 Hemos sumado a la segunda fila la primera cambiada de signo. continuación hemos sumado a la tercera fila
MATRICES Y SISTEMAS DE ECUACIONES
 MATRICES Y SISTEMAS DE ECUACIONES Definición Una matriz real de orden m n es una tabla ordenada de m n números reales a 11 a 12 a 1n A = a 21 a 22 a 2n a m1 a m2 a mn en la cual las líneas horizontales
MATRICES Y SISTEMAS DE ECUACIONES Definición Una matriz real de orden m n es una tabla ordenada de m n números reales a 11 a 12 a 1n A = a 21 a 22 a 2n a m1 a m2 a mn en la cual las líneas horizontales
PROPUESTA A. b) Para el valor de a obtenido, calcula los puntos de inflexión de la función f(x). (1 25 puntos)
 Para el valor de a obtenido, calcula los puntos de inflexión de la función f(x). (1 25 puntos)") PROPUESTA A 1A. a) Determina el valor del parámetro a R, para que la función f(x) = (x a) e x tenga un mínimo relativo en x = 0. Razona, de hecho, es un mínimo absoluto. (1 25 puntos) b) Para el valor
PROPUESTA A 1A. a) Determina el valor del parámetro a R, para que la función f(x) = (x a) e x tenga un mínimo relativo en x = 0. Razona, de hecho, es un mínimo absoluto. (1 25 puntos) b) Para el valor
PROPUESTA A., se pide: a) Calcula las asíntotas verticales y oblicuas de f(x). (1,25 puntos)
 Calcula las asíntotas verticales y oblicuas de f(x). (1,25 puntos)") PROPUEST. Dada la función f ( ), se pide: a) Calcula las asíntotas verticales y oblicuas de f(). (, puntos) b) Coordenadas de los máimos y mínimos relativos de f(). (, puntos). Calcula las siguientes integrales:
PROPUEST. Dada la función f ( ), se pide: a) Calcula las asíntotas verticales y oblicuas de f(). (, puntos) b) Coordenadas de los máimos y mínimos relativos de f(). (, puntos). Calcula las siguientes integrales:
Algebra lineal y conjuntos convexos
 Apéndice A Algebra lineal y conjuntos convexos El método simplex que se describirá en el Tema 2 es de naturaleza algebraica y consiste en calcular soluciones de sistemas de ecuaciones lineales y determinar
Apéndice A Algebra lineal y conjuntos convexos El método simplex que se describirá en el Tema 2 es de naturaleza algebraica y consiste en calcular soluciones de sistemas de ecuaciones lineales y determinar
Álgebra Lineal y Geometría I. Prueba 3. Grupo A. 12 de marzo de (
 Álgebra Lineal y Geometría I. Prueba 3. Grupo A. 2 de marzo de 208. Apellidos: Nombre: DNI: Ejercicio.-(4 puntos) Se considera la matriz siguiente: A = 2 0 3 0 2. Calcule W = null(a 2I), W 2 = null(a 4I)
Álgebra Lineal y Geometría I. Prueba 3. Grupo A. 2 de marzo de 208. Apellidos: Nombre: DNI: Ejercicio.-(4 puntos) Se considera la matriz siguiente: A = 2 0 3 0 2. Calcule W = null(a 2I), W 2 = null(a 4I)
Álgebra Lineal UCR. Sétimo tema, 2013
 Álgebra Lineal UCR Sétimo tema, 2013 Presentaciones basadas principalmente en Arce,C, Castillo,W y González, J. (2004) Álgebra lineal. Tercera edición. UCR. San Pedro. Otras fuentes serán mencionadas cuando
Álgebra Lineal UCR Sétimo tema, 2013 Presentaciones basadas principalmente en Arce,C, Castillo,W y González, J. (2004) Álgebra lineal. Tercera edición. UCR. San Pedro. Otras fuentes serán mencionadas cuando
Matemáticas Empresariales II. Diagonalización de Matrices
 Matemáticas Empresariales II Lección 6 Diagonalización de Matrices Manuel León Navarro Colegio Universitario Cardenal Cisneros M. León Matemáticas Empresariales II 1 / 25 Introducción Sea f un endomorfismo,
Matemáticas Empresariales II Lección 6 Diagonalización de Matrices Manuel León Navarro Colegio Universitario Cardenal Cisneros M. León Matemáticas Empresariales II 1 / 25 Introducción Sea f un endomorfismo,
RESUMEN DEL TEMA 7 VALORES Y VECTORES PROPIOS
 RESUMEN DEL TEMA 7 VALORES Y VECTORES PROPIOS 1. Determinantes El determinante de una matriz cuadrada n n A = a 21 a 22 a 2n a n1 a n2 a nn es un número real, y se representa por: A = a 21 a 22 a 2n a
RESUMEN DEL TEMA 7 VALORES Y VECTORES PROPIOS 1. Determinantes El determinante de una matriz cuadrada n n A = a 21 a 22 a 2n a n1 a n2 a nn es un número real, y se representa por: A = a 21 a 22 a 2n a
Fundamentos matemáticos básicos de la realidad virtual
 Fundamentos matemáticos básicos de la realidad virtual José Ignacio Ronda Prieto Grupo de Tratamiento de Imágenes, ETSIT, UPM jir@gti.ssr.upm.es Fundamentos matemáticos básicos de la realidad virtual 1
Fundamentos matemáticos básicos de la realidad virtual José Ignacio Ronda Prieto Grupo de Tratamiento de Imágenes, ETSIT, UPM jir@gti.ssr.upm.es Fundamentos matemáticos básicos de la realidad virtual 1
Álgebra Lineal. Tema 7. Forma normal de una transformación
 Álgebra Lineal Tema 7. Forma normal de una transformación Grado en Ingeniería Informática Doble Grado en Ingeniería Informática y Administración de Empresas AUTORES: J. S ALAS, A. T ORRENTE Y E.J.S. V
Álgebra Lineal Tema 7. Forma normal de una transformación Grado en Ingeniería Informática Doble Grado en Ingeniería Informática y Administración de Empresas AUTORES: J. S ALAS, A. T ORRENTE Y E.J.S. V
ALGEBRA. Escuela Politécnica Superior de Málaga
 ALGEBRA. Escuela Politécnica Superior de Málaga Tema 1. Espacios Vectoriales. Sistemas de ecuaciones. Espacio vectorial. Espacios vectoriales R n. Dependencia e independencia lineal. Base. Matrices y determinantes.
ALGEBRA. Escuela Politécnica Superior de Málaga Tema 1. Espacios Vectoriales. Sistemas de ecuaciones. Espacio vectorial. Espacios vectoriales R n. Dependencia e independencia lineal. Base. Matrices y determinantes.
Problemas y Ejercicios Resueltos. Tema 4: Sistemas de ecuaciones lineales.
 Problemas y Ejercicios Resueltos. Tema 4: Sistemas de ecuaciones lineales. Ejercicios 1.- Determinar el rango de la siguiente matriz: 0 1 3 4 1 3 5. Solución. 0 1 3 4 1 3 5 AT 1( 1) AT 1 ( 1)T 14 ( 1 )
Problemas y Ejercicios Resueltos. Tema 4: Sistemas de ecuaciones lineales. Ejercicios 1.- Determinar el rango de la siguiente matriz: 0 1 3 4 1 3 5. Solución. 0 1 3 4 1 3 5 AT 1( 1) AT 1 ( 1)T 14 ( 1 )
PROPUESTA A. 1A a) Enuncia el teorema de Bolzano.
 Enuncia el teorema de Bolzano.") PROPUESTA A 1A a) Enuncia el teorema de Bolzano. (0,5 puntos) b) Razona que las gráficas de las funciones f(x) = 3x 5 10x 4 + 10x 3 + 3 y g(x) = e x se cortan en algún punto con coordenada de abcisa entre
PROPUESTA A 1A a) Enuncia el teorema de Bolzano. (0,5 puntos) b) Razona que las gráficas de las funciones f(x) = 3x 5 10x 4 + 10x 3 + 3 y g(x) = e x se cortan en algún punto con coordenada de abcisa entre
Técnicas de optimización en visión artificial
 Técnicas de optimización en visión artificial Alberto Martín, Francisco Rivas y JoseMaría Cañas Máster en Visión Artificial Alberto Martín, Francisco Rivas y JoseMaría Cañas Técnicas de optimización en
Técnicas de optimización en visión artificial Alberto Martín, Francisco Rivas y JoseMaría Cañas Máster en Visión Artificial Alberto Martín, Francisco Rivas y JoseMaría Cañas Técnicas de optimización en
Tema 9. Análisis factorial discriminante
 Máster en Técnicas Estadísticas Análisis Multivariante. Año 2008 2009. Profesor: César Sánchez Sellero. 9.1. Introducción. Tema 9. Análisis factorial discriminante Supongamos que están denidos I grupos,
Máster en Técnicas Estadísticas Análisis Multivariante. Año 2008 2009. Profesor: César Sánchez Sellero. 9.1. Introducción. Tema 9. Análisis factorial discriminante Supongamos que están denidos I grupos,
Método de mínimos cuadrados (Continuación)
") Clase No. 11: MAT 251 Método de mínimos cuadrados (Continuación) Dr. Alonso Ramírez Manzanares CIMAT A.C. e-mail: alram@ cimat.mx web: http://www.cimat.mx/ alram/met_num/ Dr. Joaquín Peña Acevedo CIMAT
Clase No. 11: MAT 251 Método de mínimos cuadrados (Continuación) Dr. Alonso Ramírez Manzanares CIMAT A.C. e-mail: alram@ cimat.mx web: http://www.cimat.mx/ alram/met_num/ Dr. Joaquín Peña Acevedo CIMAT
2 + 5i. b) Hallar todas las raíces de raíz cúbica de -27. Dar el resultado en binómica y polar.
 Hallar todas las raíces de raíz cúbica de -27. Dar el resultado en binómica y polar.") 1.- Números complejos: a) Realizad la operación: 3 + ı 2 + 5i Proporcionad el resultado en forma binómica. b) Hallar todas las raíces de raíz cúbica de -27. Dar el resultado en binómica y polar. a) Poner
1.- Números complejos: a) Realizad la operación: 3 + ı 2 + 5i Proporcionad el resultado en forma binómica. b) Hallar todas las raíces de raíz cúbica de -27. Dar el resultado en binómica y polar. a) Poner
Determinantes. Definiciones básicas sobre determinantes. José de Jesús Angel Angel.
 Determinantes Definiciones básicas sobre determinantes wwwmathcommx José de Jesús Angel Angel jjaa@mathcommx MathCon c 2007-2008 Contenido 1 Determinantes 2 11 Propiedades de determinantes 4 2 Inversa
Determinantes Definiciones básicas sobre determinantes wwwmathcommx José de Jesús Angel Angel jjaa@mathcommx MathCon c 2007-2008 Contenido 1 Determinantes 2 11 Propiedades de determinantes 4 2 Inversa
Diagonalización de Endomorfismos
 Tema 5 Diagonalización de Endomorfismos 5.1 Introducción En este tema estudiaremos la diagonalización de endomorfismos. La idea central de este proceso es determinar, para una aplicación lineal f : E E,
Tema 5 Diagonalización de Endomorfismos 5.1 Introducción En este tema estudiaremos la diagonalización de endomorfismos. La idea central de este proceso es determinar, para una aplicación lineal f : E E,
Repaso de conceptos de álgebra lineal
 MÉTODOS AVANZADOS EN APRENDIZAJE ARTIFICIAL: TEORÍA Y APLICACIONES A PROBLEMAS DE PREDICCIÓN Manuel Sánchez-Montañés Luis Lago Ana González Escuela Politécnica Superior Universidad Autónoma de Madrid Repaso
MÉTODOS AVANZADOS EN APRENDIZAJE ARTIFICIAL: TEORÍA Y APLICACIONES A PROBLEMAS DE PREDICCIÓN Manuel Sánchez-Montañés Luis Lago Ana González Escuela Politécnica Superior Universidad Autónoma de Madrid Repaso
PROBLEMAS RESUELTOS SELECTIVIDAD ANDALUCÍA 2000 MATEMÁTICAS II TEMA 3: ESPACIO AFIN Y EUCLIDEO
 PROBLEMAS RESUELTOS SELECTIVIDAD ANDALUCÍA 2000 MATEMÁTICAS II TEMA 3: ESPACIO AFIN Y EUCLIDEO Junio, Ejercicio 3, Opción B Reserva 1, Ejercicio 3, Opción B Reserva 1, Ejercicio 4, Opción A Reserva 2,
PROBLEMAS RESUELTOS SELECTIVIDAD ANDALUCÍA 2000 MATEMÁTICAS II TEMA 3: ESPACIO AFIN Y EUCLIDEO Junio, Ejercicio 3, Opción B Reserva 1, Ejercicio 3, Opción B Reserva 1, Ejercicio 4, Opción A Reserva 2,
IDENTIFICACIÓN DE SISTEMAS MÉTODOS POR SUB-ESPACIOS
 IDENTIFICACIÓN DE SISTEMAS MÉTODOS POR SUB-ESPACIOS Ing. Fredy Ruiz Ph.D. ruizf@javeriana.edu.co Maestría en Ingeniería Electrónica Pontificia Universidad Javeriana 2013 Introduccion La teoría de sistemas
IDENTIFICACIÓN DE SISTEMAS MÉTODOS POR SUB-ESPACIOS Ing. Fredy Ruiz Ph.D. ruizf@javeriana.edu.co Maestría en Ingeniería Electrónica Pontificia Universidad Javeriana 2013 Introduccion La teoría de sistemas
Algoritmo de la factorización LU
 Algoritmo de la factorización LU. Objetivo. Estudiar el algoritmo de la factorización LU de una matriz cuadrada invertible.. Requisitos: Matrices elementales y su relación con operaciones elementales.
Algoritmo de la factorización LU. Objetivo. Estudiar el algoritmo de la factorización LU de una matriz cuadrada invertible.. Requisitos: Matrices elementales y su relación con operaciones elementales.
Profesor Francisco R. Villatoro 13 de Diciembre de 1999 SOLUCIONES. 1. Una matriz A de n n es diagonalmente dominante (estrictamente) por filas si
 por filas si") Cuarta relación de problemas Técnicas Numéricas Profesor Francisco R. Villatoro 13 de Diciembre de 1999 SOLUCIONES 1. Una matriz A de n n es diagonalmente dominante estrictamente por filas si a ii > a
Cuarta relación de problemas Técnicas Numéricas Profesor Francisco R. Villatoro 13 de Diciembre de 1999 SOLUCIONES 1. Una matriz A de n n es diagonalmente dominante estrictamente por filas si a ii > a
Matrices y determinantes
 Matrices y determinantes 1 Matrices Una matriz de orden m n es un conjunto de m n números ordenados en m filas y n columnas Por ejemplo, 1 1 2 0 2 0 2 1 1 1 2 1 3 0 2 es una matriz de orden 3 5 Una matriz
Matrices y determinantes 1 Matrices Una matriz de orden m n es un conjunto de m n números ordenados en m filas y n columnas Por ejemplo, 1 1 2 0 2 0 2 1 1 1 2 1 3 0 2 es una matriz de orden 3 5 Una matriz
SISTEMAS DE ECUACIONES LINEALES MÉTODO DE LA MATRIZ INVERSA
 MÉTODO DE LA MATRIZ INVERSA Índice Presentación... 3 Método de la matriz inversa... 4 Observaciones... 5 Ejemplo I.I... 6 Ejemplo I.II... 7 Ejemplo II... 8 Sistemas compatibles indeterminados... 9 Método
MÉTODO DE LA MATRIZ INVERSA Índice Presentación... 3 Método de la matriz inversa... 4 Observaciones... 5 Ejemplo I.I... 6 Ejemplo I.II... 7 Ejemplo II... 8 Sistemas compatibles indeterminados... 9 Método
Álgebra Lineal. Tema 5 Ecuaciones diferenciales lineales
 Álgebra Lineal. Tema 5 Dep. Matemática Aplicada. UMA Tasa relativa de crecimiento Si x(t representa alguna cantidad física como el volumen de una sustancia, la población de ciertas especies, o el número
Álgebra Lineal. Tema 5 Dep. Matemática Aplicada. UMA Tasa relativa de crecimiento Si x(t representa alguna cantidad física como el volumen de una sustancia, la población de ciertas especies, o el número
Matemáticas Nivel Medio Matemáticas Ap.CC.SS.II
 Matemáticas Nivel Medio Matemáticas Ap.CC.SS.II Martes, 05 de abril de 2018 1 hora y 15 minutos. NOMBRE Y APELLIDOS CALIFICACIÓN 1. Dadas las matrices A ( 2 1 1 2 ), B ( 0 1 ) e I la matriz identidad de
Matemáticas Nivel Medio Matemáticas Ap.CC.SS.II Martes, 05 de abril de 2018 1 hora y 15 minutos. NOMBRE Y APELLIDOS CALIFICACIÓN 1. Dadas las matrices A ( 2 1 1 2 ), B ( 0 1 ) e I la matriz identidad de
OCW-V.Muto El problema de mínimos cuadrados. Cap. XIX CAPITULO XIX. EL PROBLEMA DE LOS MINIMOS CUADRADOS: PRELIMINARES
 CAPITULO XIX. EL PROBLEMA DE LOS MINIMOS CUADRADOS: PRELIMINARES. SISTEMAS LINEALES DE ECUACIONES SOBREDETERMINADOS La discusión de los problemas algebráicos de la parte anterior se había centrado exclusivamente
CAPITULO XIX. EL PROBLEMA DE LOS MINIMOS CUADRADOS: PRELIMINARES. SISTEMAS LINEALES DE ECUACIONES SOBREDETERMINADOS La discusión de los problemas algebráicos de la parte anterior se había centrado exclusivamente
Álgebra. Ingeniería Industrial. Curso 2006/2007 Examen de Septiembre
 Álgebra. Ingeniería Industrial. Curso / Examen de Septiembre OBSERVACIONES: Cada hoja entregada debe contener el nombre, apellidos y número de identificación escrito de forma clara. No mezclar ejercicios
Álgebra. Ingeniería Industrial. Curso / Examen de Septiembre OBSERVACIONES: Cada hoja entregada debe contener el nombre, apellidos y número de identificación escrito de forma clara. No mezclar ejercicios
Preparaduría V. 1.- Sea A una matriz diagonal n n cuyo polinomio característico es
 Preparaduría V 1.- Sea A una matriz diagonal n n cuyo polinomio característico es (x c 1 ) d1 (x c 2 ) d2... (x c k ) d k donde los c 1,..., c k son distintos dos a dos. Sea V el espacio de matrices n
Preparaduría V 1.- Sea A una matriz diagonal n n cuyo polinomio característico es (x c 1 ) d1 (x c 2 ) d2... (x c k ) d k donde los c 1,..., c k son distintos dos a dos. Sea V el espacio de matrices n
Tema 2. Aplicaciones lineales. Diagonalización de endomorfismos.
 Tema 2. Aplicaciones lineales. Diagonalización de endomorfismos. Álgebra Lineal Escuela Politécnica Superior Universidad de Málaga Emilio Muñoz-Velasco (Basado en los apuntes de Jesús Medina e Inmaculada
Tema 2. Aplicaciones lineales. Diagonalización de endomorfismos. Álgebra Lineal Escuela Politécnica Superior Universidad de Málaga Emilio Muñoz-Velasco (Basado en los apuntes de Jesús Medina e Inmaculada
Cuestiones de Álgebra Lineal
 Cuestiones de Álgebra Lineal Algunas de las cuestiones que aparecen en esta relación están pensadas para ser introducidas en un plataforma interactiva de aprendizaje de modo que los parámetros a, b que
Cuestiones de Álgebra Lineal Algunas de las cuestiones que aparecen en esta relación están pensadas para ser introducidas en un plataforma interactiva de aprendizaje de modo que los parámetros a, b que
PROPUESTA A. c) Demuestra, usando el Teorema de Rolle, que la ecuación anterior no puede tener más de tres raíces reales distintas.
 Demuestra, usando el Teorema de Rolle, que la ecuación anterior no puede tener más de tres raíces reales distintas.") PROPUESTA A 1A. a) Enuncia el Teorema de Bolzano y el Teorema de Rolle. (1 punto) b) Demuestra, usando el Teorema de Bolzano, que existen al menos tres raíces reales distintas de la ecuación, x 5 5x +
PROPUESTA A 1A. a) Enuncia el Teorema de Bolzano y el Teorema de Rolle. (1 punto) b) Demuestra, usando el Teorema de Bolzano, que existen al menos tres raíces reales distintas de la ecuación, x 5 5x +
M a t e m á t i c a s I I 1
 Matemáticas II Matemáticas II CEUTA Y MELILLA CONVOCATORIA SEPTIEMBRE 009 SOLUCIÓN DE LA PRUEBA DE ACCESO AUTOR: José Luis Pérez Sanz Opción A Ejercicio Como esta función está definida en el intervalo
Matemáticas II Matemáticas II CEUTA Y MELILLA CONVOCATORIA SEPTIEMBRE 009 SOLUCIÓN DE LA PRUEBA DE ACCESO AUTOR: José Luis Pérez Sanz Opción A Ejercicio Como esta función está definida en el intervalo
ÁLGEBRA Algunas soluciones a la Práctica 8
 ÁLGEBRA Algunas soluciones a la Práctica 8 Aplicaciones bilineales y formas cuadráticas (Curso 24 25 1. Comprobar si las siguientes aplicaciones son o no bilineales y en las que resulten serlo, dar la
ÁLGEBRA Algunas soluciones a la Práctica 8 Aplicaciones bilineales y formas cuadráticas (Curso 24 25 1. Comprobar si las siguientes aplicaciones son o no bilineales y en las que resulten serlo, dar la
Las matrices se denotarán usualmente por letras mayúsculas, A, B,..., y los elementos de las mismas por minúsculas, a, b,...
 INTRO. MATRICES Y DETERMINANTES Prof. Gustavo Sosa Las matrices se utilizan en el cálculo numérico, en la resolución de sistemas de ecuaciones lineales, de las ecuaciones diferenciales y de las derivadas
INTRO. MATRICES Y DETERMINANTES Prof. Gustavo Sosa Las matrices se utilizan en el cálculo numérico, en la resolución de sistemas de ecuaciones lineales, de las ecuaciones diferenciales y de las derivadas