Estéreo estático. Derivadas segundas obtenidas en direcciones distintas sobre el mismo borde
|
|
|
- Eva Godoy Méndez
- hace 6 años
- Vistas:
Transcripción
.")
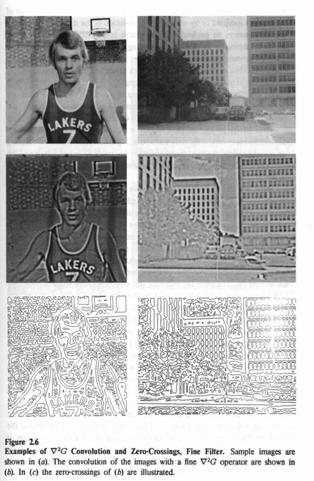
1 Derivadas segundas obtenidas en direcciones distintas sobre el mismo borde Marr propuso la detección de variaciones en la intensidad de la imagen (bordes) como bosquejo primordial. Se observa que corresponde a un cruce por cero de la segunda derivada en casi todas las direcciones(excepto la dirección del borde). Además los operadores direccionales deforman las fronteras de los objetos de ahí la aplicación de un operador no direccional como el Laplaciano (el que de todas formas tiene efectos de desplazamiento indeseables). 7

2 La detección se aplica sobre una imagen suavizada para disminuir los efectos del ruido, al que son muy sensibles los operadores derivada Función Gausiana de banda limitada Operador Laplaciano El bosquejo primordial es el cruce por cero de la función Por la regla de la cadena de la convolución El operador tiene la forma que se aprecia en la figura (usualmente se presenta su opuesto en los textos) 8

3 9

4 El cálculo de las correspondencias se beneficia de las restricciones Unicidad: cada item se puede asociar a no más de un valor de disparidad Continuidad: la disparidad varía de forma suave El número de falsos emparejamientos es proporcional al rango de valores de disparidad considerado y a la escala del bosquejo primordial. Sea w c el rango de disparidades en el bosquejo basto, w f en el bosquejo fino. Se puede considerar un rango de disparidades mayor para el bosquejo más basto (coarse) (w c >w f ). De esta forma disparidades que no se pueden detectar en el bosquejo más fino (debido al alto número de falsos emparejamientos) (izqda), se pueden detectar en el bosquejo basto. Las estimaciones de disparidad en el bosquejo basto sirven para alinear las imágenes y calcular la disparidad fina, ya que los pasos por cero estarán ahora en el rango de disparidades más fino (derecha). ALGORITMO MARR-POGGIO Detecta cambios de intensidad a diferentes resoluciones El emparejamiento de descripciones bastas controla la vergencia de los ojos, hasta alcanzar el emparejamiento Emparejamientos parciales se guardan en memoria de forma independiente Las disparidades se calculan sobre el eje x (filas) 10

, con vergencia positiva, nula y negativa.")
5 Implementación de Grimson Se extraen ventanas de proceso (retinas o fóveas) sobre las que se calcula el Bosquejo Primordial a distintas resoluciones (4) Se calcula el emparejamiento comenzando por las resoluciones más bastas. Las disparidades se calculan sobre los contornos dados por los cruces por cero. 1- Fijar las posiciones de los ojos 2- Localizar los cruces por cero de una imagen 3- Dividir la región en torno al pto correspondiente en la segunda imagen en 3 areas (pool), con vergencia positiva, nula y negativa. 4- Asignar un emparejamiento de los cruces por cero en base a los emparejamientos potenciales en los grupos 5- Deshacer ambiguedades 6- Guardar los valores de disparidad 11


6 Imágenes filtradas con filtros Laplacianos de diámetros 36, 18,9,4 12

7 Cruces por cero de las imágenes filtradas 13

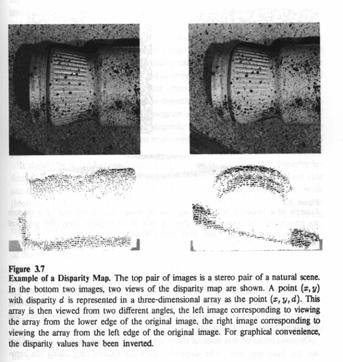
8 Mapas de disparidades resultantes 14
9 Cámaras no coplanares Imágenes con ejes Y paralelos, esto es filas coplanares. baseline distancia b entre los centros ópticos O L y O R. 2θ es el ángulo entre los dos ejes ópticos Dsitancia focal f. XYZ se transforma en X L Y L Z L mediante una rotación en torno al eje Y y una traslación en el eje X. Proyección central en los planos imagen de un punto (XYZ) en coordenadas de la cámara 15
, se reduce a las ecuaciones vistas para cámaras coplanares")
10 Triangularización Dados puntos correspondientes en las dos imágenes se pueden recuperar las coordenadas 3D en el sistema de la cámara Reescrito como: Cuando el ángulo entre los ejes ópticos es nulo (paralelos), se reduce a las ecuaciones vistas para cámaras coplanares 16
11 Restricciones y asunciones Facilitan el cálculo de correspondencias Dependen de las condiciones de captación Restricción epipolar Unicidad, compatibilidad y similaridad Continuidad de las disparidades Compatibilidad de las características Limitaciones en la magnitud de la disparidad Ordenación de los puntos proyectados en el plano imagen 17
12 Restricción epipolar El plano epipolar se define por un punto P en el espacio y los dos centros ópticos O L y O R. Las líneas que lo definen son la línea delos centros ópticos al punto y la línea base que une los centros ópticos Una línea epipolar es la intersección del plano imagen con el plano epipolar. Los epipolos son las intersecciones de los planos imagen con la línea base. Las líneas epipolares en cámaras coplanares son las filas de la imagen Un punto p L en la imagen izquierda solo puede corresponder a uno p R en la línea epipolar en la imagen derecha 18
: vecinos en una de las imágenes estéreo sólo pueden ser correspondientes a vecinos en")
13 Unicidad, compatibilidad y similaridad Unicidad: todo pixel en una de las imágenes estéreo sólo puede corresponder a otro pixel en otra de las imágenes Excepción: varios puntos en una línea 3D perpenticular a uno de los planos imagen Compatibilidad de intensidades (compatibilidad fotométrica diferencial): vecinos en una de las imágenes estéreo sólo pueden ser correspondientes a vecinos en la otra imagen si las intensidades son similares y la diferencia también lo es Similaridad geométrica: dos lineas en imágenes estéreo son correspondientes si su longitud y orientación es similar (su diferencia está por debajo de un umbral de decisión) 19
14 Continuidad de las disparidades Suavidad y continuidad de las disparidades : puntos vecinos tendrán disparidades similares. Continuidad de las disparidades a lo largo de los bordes (restricción de continuidad en las figuras): dados puntos correspondientes sobre bordes definidos en las imágenes estéreo, los puntos vecinos sobre los bordes son correspondientes si las disparidades son similares 20

 Bordes de oclusión debidos a las siluetas de los objetos frente al")
15 Compatibilidad de las características Las características extraidas sólo deben corresponderse si tienen el mismo origen físico en la escena. No son fiables los bordes que no tienen un origen físico perceptible por ambas cámaras Tipos de bordes: Bordes debidos a la orientación delas superficies en la imagen Bordes de reflectacia debidos a los cambios de caracteristicas de reflectancia en la superficie Bordes de iluminación debidos a efectos de iluminación Bordes de reflejos debidos a especularidades de la superficie (no fiable) Bordes de oclusión debidos a las siluetas de los objetos frente al fondo (no fiable) 21
16 Límites en las disparidades Límite de la disparidad: máximo valor de disparidad perceptible (computacionalmente sirve para limitar la búsqueda de correspondencias) Implica la asunción de una distancia mínima de los objetos a la cámara El gradiente de la disparidad es la variabilidad de las disparidades entre puntos cercanos. Esta variabilidad se establece en relación a la separación ciclópea d cs (la distancia entre los puntos que veríamos con un ojo colocado entre los dos ojos). Se establece también un límite para este gradiente que restringe la búsqueda de correspondencias. 22
17 Gradiente de las disparidades Separación ciclópea Limite en el gradiente de la disparidad 23

18 Ordenación en el plano imagen Restricción de ordenación: los puntos que caen en una linea epipolar en una imagen estéreo se proyectan en la linea epipolar correspondiente en la otra imagen en exactamente el mismo orden Esta restricción implica que todos los objetos están a una distancia similar 24
19 Análisis de correspondencias basado Se extiende la restricción fotométrica a bloques de la imagen (area based stereo) que pueden corresponder a pixels normales como a pixels detectados mediante algoritmos de extracción de caracteristicas. en la intensidad Método basado en el emparejamiento de bloques. (MPEG) La imagen se divide en bloques del mismo tamaño, se calcula la correspondencia entre bloques mediante correlación. El proceso admite refinamientos disminuyendo el tamaño de los bloques. 25
 Si consideramos correspondencias entre bloques adyacentes no solapados la disparidad d debe ser múltiplo del tamaño de la imagen m.")
20 La medida de similitud entre bloques puede ser un error cuadrático medio. (cámaras coplanares) Si consideramos correspondencias entre bloques adyacentes no solapados la disparidad d debe ser múltiplo del tamaño de la imagen m. El tamaño del bloque depende de los tamaños de los objetos, la imagen, las texturas,etc. Restricciónde continuidad Refinamiento a nivel de pixel 26

21 27
22 Emparejamiento de líneas epipolares (asume geometría estéreo estándar (ssg) por lo que las lineas epipolares son las filas de la imagen ) Error de emparejamiento sobre la linea epipolar para la disparidad Perfil epipolar: las disparidades sobre una linea epipolar Restricción de ordenación Funcional de disimilitud acumulada dado un vector de disparidades d El problema de determinar las disparidades se puede formular como la búsqueda del vector de disparidades minimización del funcional de disimilitud acumulada, con la restricción de ordenación. 28
23 Las disparidades están acotadas Restricción de unicidad: todo pixel tiene su correspondiente La restricción de ordenación queda como función parcial de disimilitud acumulada que se define inductivamente 29
24 inicialización Cálculo de las disimilitudes parciales acumulativas Minimo global Recuperación del vector de disparidades 30
25 Emparejamiento de bloques en imágenes color La constancia del color introduce robusted en el cálculo de las correspondencias. La restricción física se reescribe puntos cercanos de la superficie tendrán colores similares RGB normalizado Espacio HSI Distancias aplicables 31


26 Error de emparejamiento de bloques, sobre el espacio RGB normalizado El algoritmo basado en el emparejamiento de bloques será el mismo que en el caso de las imágenes monócromas. El refinamiento para obtener el mapa denso de disparidades se realizará usando la distancia en el espacio de color 32
27 Análisis de correspondencias basados en características (Feature based correspondence analysis) Dos fases: Ventajas Extracción de las características: bordes, etc Emparejamiento de pixeles pertenecientes a las características Se reducen las ambigüedades al disminuir el número de candidatos Es menos sensible a las variaciones fotométricas ( si las características son robustas) Las disparidades pueden determinarse de forma más precisa Desventaja: el mapa de disparidades es disperso (no denso) 33
28 Algoritmo básico El punto de partida son la imágen de cruces por cero detectada sobre la imagen izquierda. Los pixels de los bordes detectados son el punto de partida para la búsqueda del pixel correspondiente. La determinación de las correspondencias se hace examinando el error cuadrático normalizado como medida de similitud 34
29 35

30 36
31 Análisis basado en las estadísticas de los vectores de cruce por cero Las caracteristicas son los cruces por cero de la convolución con el Laplaciano de la Gausiana a distintas escalas σ 1, σ 2, σ 3, Un vector de cruces por cero e σ (i,j) se define como un vector unitario bidimensional a lo largo de los cruces por cero vecinos comenzando en (i,j) Si no es un cruce por cero Con E x (i,j), E y (i,j) gradientes en (i,j) 37
32 Un par de vectores e L σ y e R σ establecen un par de candidatos correspondientes si la diferencia angular es menor que un cierto umbral Sea la disparidad, se pueden definir las funciones de asignación binarias Para puntos correspondientes sino La tabla de frecuencias de las disparidades nos da el histograma global de disparidades (para la imagen izquierda, idem para la derecha) El histograma global de disparidades contiene muchas disparidades incorrectas. Se puede asumir que los picos en el histograma especifican correspondencias correctas 38
33 Un candidato multi-intervalo de disparidad viene dada por un umbral aplicado al histograma global de disparidades. Se considera que estas disparidades son válidas y son las que pueden ser aceptadas. Sea H σ el máximo global del histograma El proceso global puede servir para definir candidatos para el cálculo detallado de las correspondencias. Para esto el análisis se repite a nivel local 39
34 La ventana La ventana local en torno al punto p El histograma local de las disparidades es la tabla de frecuencias de las disparidades dentro de las ventanas en las imágenes dcha e izda en la misma posición, para las disparidades dentro del multi-intervalo candidato La dimensión de la ventana está relacionada con el filtro LoG utilizado (con la varianza) 40
35 Los histogramas locales pueden variar mucho, dependiendo de condiciones locales como la existencia de un borde sólo en una de las imágenes, pero en general son similares. Los histogramas locales se calculan para distintos valores de la varianza, esto es, varias resoluciones. Mejor resolución : la que tiene la mayor diferencia entre el máximo y el segundo máximo del histograma local. Asume que es el maximo valor para la resolución para la disparidad y es el segundo mayor valor del histograma local para Esto especifica un valor diferencia (analogamente para la dcha) Una asignación se acepta sólo si L(r,s) y R(r,s) superan un cierto umbral y si y son muy similares. La disparidad finalmente es de la forma 41
36 42
37 Estéreo con tres cámaras Configuraciones de las cámaras: Coplanares: extensión de la geometría estéreo standard. Las lineas epipolares son las lineas horizontales (imágenes colineales) o las horizontales y verticales (en ángulo recto) Arbitrarias. Las lineas epipolares no coinciden con las de la imagen Estrategias de asignación de puntos Sólo se consideran puntos con correspondencias en las tres imágenes. Menos puntos asignados Se consideran puntos con correspondencias al menos en dos imágenes. (Para soslayar oclusiones) 43
38 O 1, O 2, O 3 son los centros de proyección P, R son puntos en el espacio 3D p 1, p 2, p 3 son las proyecciones del punto P. Las lineas epipolares para el punto P son l 1, l 2 en las imágenes de las camaras 1 y 2 (plano O 1 O 1 P). La linea l 3 es la proyección de la linea O 1 P en el plano de imagen de la cámara 3 (plano O 1 O 3 P). La linea m 3 es la proyección de la linea O 2 P en el plano de imagen de la cámara 3 (plano O 2 O 3 P). Un punto correspondiente en las tres imágenes caerá en las intersecciones de los líneas epipolares definidas por los correspondientes planos epipolares. 44

39 El punto de partida son los bordes calculados con LoG Determina las correspondencias en las otras dos imagenes Determina las corespondenicias triples como intersecciones de las lineas epipolares Se determina directamente la posición en 3D como intersección de los planos epipolares 45
40 Algunas referencias Grimson, From Images to surfaces, MIT Press 1981 Klette, Schluns, Koschan, Computer vision. Three-Dimensional data from images, Springer Verlag 46
Geometría de las superficies
 Geometría de las superficies Klette, schluns, koschan Computer vision: three dimensional data from images Cap 3 1 Representaciones funcionales Representación mediante una ecuación condicional para X e
Geometría de las superficies Klette, schluns, koschan Computer vision: three dimensional data from images Cap 3 1 Representaciones funcionales Representación mediante una ecuación condicional para X e
Detección de bordes: metodos lineales de cálculo de gradientesk, etc. Detección de bordes. Métodos basados en operadores lineales de gradiente
 Detección de bordes Métodos basados en operadores lineales de gradiente 1 Bordes Variaciones fuertes de la intensidad que corresponden a las fronteras de los objetos visualizados Métodos basados en el
Detección de bordes Métodos basados en operadores lineales de gradiente 1 Bordes Variaciones fuertes de la intensidad que corresponden a las fronteras de los objetos visualizados Métodos basados en el
Detección de bordes en una imagen.
 Detección de bordes en una imagen. Departamento de Ingeniería electrónica, Telecomunicación y Automática. Área de Ingeniería de Sistemas y Automática OBJETIVOS: Utilizar distintas máscaras empleadas para
Detección de bordes en una imagen. Departamento de Ingeniería electrónica, Telecomunicación y Automática. Área de Ingeniería de Sistemas y Automática OBJETIVOS: Utilizar distintas máscaras empleadas para
 GRADIENTE La laplaciana es un buen filtro paso alto, pero no es una buena herramienta para resaltar o detectar los bordes. En muchos casos, los bordes o límites de las figuras o de las regiones aparecen
GRADIENTE La laplaciana es un buen filtro paso alto, pero no es una buena herramienta para resaltar o detectar los bordes. En muchos casos, los bordes o límites de las figuras o de las regiones aparecen
Técnicas de inteligencia artificial. Visión Artificial Visión 3D
 Técnicas de inteligencia artificial Visión Artificial Visión 3D Indice Introducción Visión estéreo Introducción Cuando usamos una cámara, perdemos la información 3D x y z y x z y x Sin embargo, la información
Técnicas de inteligencia artificial Visión Artificial Visión 3D Indice Introducción Visión estéreo Introducción Cuando usamos una cámara, perdemos la información 3D x y z y x z y x Sin embargo, la información
Visión artificial y Robótica Detección de movimiento y flujo óptico. Depto. de Ciencia de la Computación e Inteligencia Artificial
 Visión artificial y Robótica Detección de movimiento y flujo óptico Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Introducción Flujo óptico Structure From Motion Introducción
Visión artificial y Robótica Detección de movimiento y flujo óptico Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Introducción Flujo óptico Structure From Motion Introducción
Estática. Equilibrio de un cuerpo rígido
 Estática 5 Equilibrio de un cuerpo rígido Objectivos Escribir las ecuaciones de equilibrio de un cuerpo rígido. Concepto de diagrama de cuerpo libre para un cuerpo rígido. Resolver problemas de equilibrio
Estática 5 Equilibrio de un cuerpo rígido Objectivos Escribir las ecuaciones de equilibrio de un cuerpo rígido. Concepto de diagrama de cuerpo libre para un cuerpo rígido. Resolver problemas de equilibrio
Tema 4. Reducción del ruido
 Div. Ingeniería de Sistemas y Automática Universidad Miguel Hernández GRUPO DE TECNOLOGÍA INDUSTRIAL Tabla de Contenidos Definición Filtros Lineales Filtros Temporales Realce Espacial Definición Ruido:
Div. Ingeniería de Sistemas y Automática Universidad Miguel Hernández GRUPO DE TECNOLOGÍA INDUSTRIAL Tabla de Contenidos Definición Filtros Lineales Filtros Temporales Realce Espacial Definición Ruido:
Imágenes binarias. Horn, Robot Vision Haralick & Shapiro, Computer and Robot Vision Gonzalez & Woods, Digital Image Processing. imagenes binarias 1
 Imágenes binarias Horn, Robot Vision Haralick & Shapiro, Computer and Robot Vision Gonzalez & Woods, Digital Image Processing imagenes binarias 1 Propiedades geométricas simples: Area: la integral de la
Imágenes binarias Horn, Robot Vision Haralick & Shapiro, Computer and Robot Vision Gonzalez & Woods, Digital Image Processing imagenes binarias 1 Propiedades geométricas simples: Area: la integral de la
Fundamentos de la Visión Artificial. Prof. Dr. Francisco Gómez Rodríguez Prof. Manuel J. Domínguez Morales 1
 Fundamentos de la Visión Artificial Prof. Dr. Francisco Gómez Rodríguez Prof. Manuel J. Domínguez Morales 1 Índice 1. Introducción a lavisión Artificial 2. Adquisición y representación de imágenes 3. Filtrado
Fundamentos de la Visión Artificial Prof. Dr. Francisco Gómez Rodríguez Prof. Manuel J. Domínguez Morales 1 Índice 1. Introducción a lavisión Artificial 2. Adquisición y representación de imágenes 3. Filtrado
Tema 4:Segmentación de imágenes
 Tema 4:Segmentación de imágenes La segmentación de imágenes divide la imagen en sus partes constituyentes hasta un nivel de subdivisión en el que se aíslen las regiones u objetos de interés. Los algoritmos
Tema 4:Segmentación de imágenes La segmentación de imágenes divide la imagen en sus partes constituyentes hasta un nivel de subdivisión en el que se aíslen las regiones u objetos de interés. Los algoritmos
MÓDULO 8: VECTORES. Física
 MÓDULO 8: VECTORES Física Magnitud vectorial. Elementos. Producto de un vector por un escalar. Operaciones vectoriales. Vector unitario. Suma de vectores por el método de componentes rectangulares. UTN
MÓDULO 8: VECTORES Física Magnitud vectorial. Elementos. Producto de un vector por un escalar. Operaciones vectoriales. Vector unitario. Suma de vectores por el método de componentes rectangulares. UTN
Visión artificial y Robótica Modelos de movimiento y mapas. Depto. de Ciencia de la Computación e Inteligencia Artificial
 Visión artificial y Robótica Modelos de movimiento y mapas Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Sistemas de coordenadas Localización de objetos en el espacio Modelos
Visión artificial y Robótica Modelos de movimiento y mapas Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Sistemas de coordenadas Localización de objetos en el espacio Modelos
NOCIÓN DE PUNTO, RECTA Y PLANO
 NOCIÓN DE PUNTO, RECT Y PLNO Si les das una imagen de una figura o un objeto, como un mapa con las ciudades y los caminos marcados en él, Cómo podrías explicar la imagen geométricamente? Después de completar
NOCIÓN DE PUNTO, RECT Y PLNO Si les das una imagen de una figura o un objeto, como un mapa con las ciudades y los caminos marcados en él, Cómo podrías explicar la imagen geométricamente? Después de completar
Técnicas Clásicas de Segmentación de Imagen
 Técnicas Clásicas de Segmentación de Imagen Marcos Martín 21 de mayo de 2002 1. Introducción El primer paso en cualquier proceso de análisis de imagen es la segmentación. Mediante la segmentación vamos
Técnicas Clásicas de Segmentación de Imagen Marcos Martín 21 de mayo de 2002 1. Introducción El primer paso en cualquier proceso de análisis de imagen es la segmentación. Mediante la segmentación vamos
Cálculo en varias variables
 Cálculo en varias variables Dpto. Matemática Aplicada Universidad de Málaga Resumen Límites y continuidad Funciones de varias variables Límites y continuidad en varias variables 1 Límites y continuidad
Cálculo en varias variables Dpto. Matemática Aplicada Universidad de Málaga Resumen Límites y continuidad Funciones de varias variables Límites y continuidad en varias variables 1 Límites y continuidad
Capítulo 3. 3. Marco Teórico.
 Capítulo 3 3. Marco Teórico. La visión artificial o visión por computador se define como un área multidisciplinar que pretende, en cierta medida, reproducir artificialmente el sentido de la vista mediante
Capítulo 3 3. Marco Teórico. La visión artificial o visión por computador se define como un área multidisciplinar que pretende, en cierta medida, reproducir artificialmente el sentido de la vista mediante
Proyecto. Tema 6 sesión 2: Generación de Rectas, Circunferencias y Curvas. Geometría Analítica. Isidro Huesca Zavaleta
 Geometría Analítica Tema 6 sesión 2: Generación de Rectas, Circunferencias y Curvas Isidro Huesca Zavaleta La Integración de dos Ciencias La Geometría Analítica nació de la integración de dos ciencias
Geometría Analítica Tema 6 sesión 2: Generación de Rectas, Circunferencias y Curvas Isidro Huesca Zavaleta La Integración de dos Ciencias La Geometría Analítica nació de la integración de dos ciencias
Unidad III: Curvas en R2 y ecuaciones paramétricas
 Unidad III: Curvas en R2 y ecuaciones paramétricas 2.1 Ecuación paramétrica de la línea recta. La recta constituye una parte fundamental de las matemáticas. Existen numerosas formas de representar una
Unidad III: Curvas en R2 y ecuaciones paramétricas 2.1 Ecuación paramétrica de la línea recta. La recta constituye una parte fundamental de las matemáticas. Existen numerosas formas de representar una
CFGS CONSTRUCCION METALICA MODULO 246 DISEÑO DE CONSTRUCCIONES METALICAS
 CFGS CONSTRUCCION METALICA MODULO 246 DISEÑO DE CONSTRUCCIONES METALICAS U.T. 4.- ESTATICA. 3.1.- Centro de gravedad de un cuerpo. Un cuerpo de masa M, se puede considerar compuesto por multitud de partículas
CFGS CONSTRUCCION METALICA MODULO 246 DISEÑO DE CONSTRUCCIONES METALICAS U.T. 4.- ESTATICA. 3.1.- Centro de gravedad de un cuerpo. Un cuerpo de masa M, se puede considerar compuesto por multitud de partículas
VISIÓN 3D. José M. Sebastián - Luis M. Jiménez. Problema Central de la Visión Artificial Tridimensional.
 VISIÓN 3D José M. Sebastián - Luis M. Jiménez Problema Central de la Visión Artificial Tridimensional. A partir de una imagen o de una secuencia de imágenes de un objeto estacionario o en movimiento, tomada
VISIÓN 3D José M. Sebastián - Luis M. Jiménez Problema Central de la Visión Artificial Tridimensional. A partir de una imagen o de una secuencia de imágenes de un objeto estacionario o en movimiento, tomada
Sistema de Coordenadas
 Sistemas de Coordenadas Los sistemas de coordenadas son sistemas diseñados para localizar de forma precisa puntos sobre el planeta Tierra. Debido a que los sistemas de coordenadas se utilizan en mapas
Sistemas de Coordenadas Los sistemas de coordenadas son sistemas diseñados para localizar de forma precisa puntos sobre el planeta Tierra. Debido a que los sistemas de coordenadas se utilizan en mapas
Capítulo 2. Técnicas de procesamiento digital de imágenes y reconocimiento de patrones.
 Capítulo 2. Técnicas de procesamiento digital de imágenes y reconocimiento de patrones. 2.1 Revisión sistema reconocimiento caracteres [9]: Un sistema de reconocimiento típicamente esta conformado por
Capítulo 2. Técnicas de procesamiento digital de imágenes y reconocimiento de patrones. 2.1 Revisión sistema reconocimiento caracteres [9]: Un sistema de reconocimiento típicamente esta conformado por
Tema 5: Elementos de geometría diferencial
 Tema 5: Elementos de geometría diferencial José D. Edelstein Universidade de Santiago de Compostela FÍSICA MATEMÁTICA Santiago de Compostela, abril de 2011 Coordenadas locales y atlas. Funciones y curvas.
Tema 5: Elementos de geometría diferencial José D. Edelstein Universidade de Santiago de Compostela FÍSICA MATEMÁTICA Santiago de Compostela, abril de 2011 Coordenadas locales y atlas. Funciones y curvas.
Que el estudiante sepa aplicar las principales técnicas que sirven para resaltar características en imágenes
 1 Facultad: Ingeniería. Escuela: Biomédica Asignatura: Imágenes Médicas Realce de Características Objetivos Que el estudiante sepa aplicar las principales técnicas que sirven para resaltar características
1 Facultad: Ingeniería. Escuela: Biomédica Asignatura: Imágenes Médicas Realce de Características Objetivos Que el estudiante sepa aplicar las principales técnicas que sirven para resaltar características
Mapa Curricular: Funciones y Modelos
 A.PR.11.2.1 Determina el dominio y el alcance de las funciones a partir de sus diferentes representaciones. A.PR.11.2.2 Identifica y aplica las relaciones entre los puntos importantes de una función (ceros,
A.PR.11.2.1 Determina el dominio y el alcance de las funciones a partir de sus diferentes representaciones. A.PR.11.2.2 Identifica y aplica las relaciones entre los puntos importantes de una función (ceros,
La práctica del análisis de correspondencias
 La práctica del análisis de correspondencias MICHAEL GREENACRE Catedrático de Estadística en la Universidad Pompeu Fabra Separata del capítulo 11 Contribuciones a la inercia Primera edición: julio 2008
La práctica del análisis de correspondencias MICHAEL GREENACRE Catedrático de Estadística en la Universidad Pompeu Fabra Separata del capítulo 11 Contribuciones a la inercia Primera edición: julio 2008
a) La ecuación del plano que pasa por el punto ( 1, 1, 0 ). (3 puntos) b) La ecuación del plano que es paralelo a la recta r.
 La ecuación del plano que pasa por el punto ( 1, 1, 0 ). (3 puntos) b) La ecuación del plano que es paralelo a la recta r.") PROBLEMAS DE SELECTIVIDAD. BLOQUE GEOMETRÍA 1. En el espacio se dan las rectas Obtener a) El valor de para el que las rectas r y s están contenidas en un plano. (4 puntos) b) La ecuación del plano que
PROBLEMAS DE SELECTIVIDAD. BLOQUE GEOMETRÍA 1. En el espacio se dan las rectas Obtener a) El valor de para el que las rectas r y s están contenidas en un plano. (4 puntos) b) La ecuación del plano que
Cálculo de mapas de elevación de zonas urbanas
 Universidad de la República Facultad de Ingeniería Instituto de Computación Informe de Proyecto de Grado Supervisor: Andrés Almansa Co-supervisor: Javier Preciozzi Cálculo de mapas de elevación de zonas
Universidad de la República Facultad de Ingeniería Instituto de Computación Informe de Proyecto de Grado Supervisor: Andrés Almansa Co-supervisor: Javier Preciozzi Cálculo de mapas de elevación de zonas
Segmentación Basada en Bordes
 Segmentación Basada en Bordes Detección de Puntos: Para detectar puntos en una imagen podemos usar una máscara como esta: -1-1 -1-1 8-1 -1-1 -1 Usarlo en Matlab sería muy sencillo: >> w = [-1-1 -1; -1
Segmentación Basada en Bordes Detección de Puntos: Para detectar puntos en una imagen podemos usar una máscara como esta: -1-1 -1-1 8-1 -1-1 -1 Usarlo en Matlab sería muy sencillo: >> w = [-1-1 -1; -1
Lección 2: Funciones vectoriales: límite y. continuidad. Diferenciabilidad de campos
 Lección 2: Funciones vectoriales: límite y continuidad. Diferenciabilidad de campos vectoriales 1.1 Introducción En economía, frecuentemente, nos interesa explicar la variación de unas magnitudes respecto
Lección 2: Funciones vectoriales: límite y continuidad. Diferenciabilidad de campos vectoriales 1.1 Introducción En economía, frecuentemente, nos interesa explicar la variación de unas magnitudes respecto
Geometría Analítica Agosto 2016
 Laboratorio #1 Distancia entre dos puntos I.- Demostrar que los puntos dados no son colineales. 1) A (0, 5), B(3, 1), C( 11, 27) 2) A (1, 4), B( 2, 10), C(5, 5) II.- Demostrar que los puntos dados forman
Laboratorio #1 Distancia entre dos puntos I.- Demostrar que los puntos dados no son colineales. 1) A (0, 5), B(3, 1), C( 11, 27) 2) A (1, 4), B( 2, 10), C(5, 5) II.- Demostrar que los puntos dados forman
1. Vectores 1.1. Definición de un vector en R2, R3 (Interpretación geométrica), y su generalización en Rn.
, y su generalización en Rn.") 1. VECTORES INDICE 1.1. Definición de un vector en R 2, R 3 (Interpretación geométrica), y su generalización en R n...2 1.2. Operaciones con vectores y sus propiedades...6 1.3. Producto escalar y vectorial
1. VECTORES INDICE 1.1. Definición de un vector en R 2, R 3 (Interpretación geométrica), y su generalización en R n...2 1.2. Operaciones con vectores y sus propiedades...6 1.3. Producto escalar y vectorial
La representación gráfica de una función cuadrática es una parábola.
 Función Cuadrática A la función polinómica de segundo grado +bx+c, siendo a, b, c números reales y, se la denomina función cuadrática. Los términos de la función reciben los siguientes nombres: La representación
Función Cuadrática A la función polinómica de segundo grado +bx+c, siendo a, b, c números reales y, se la denomina función cuadrática. Los términos de la función reciben los siguientes nombres: La representación
Fundamentos de POV-Ray. Computación Geométrica 2010/2011 Jorge Calvo Zaragoza
 Fundamentos de POV-Ray Computación Geométrica 2010/2011 Jorge Calvo Zaragoza Índice 1. Introducción 2. Fundamentos del trazado de rayos 3. Construcción de escenas con POV-Ray 4. Geometría sólida constructiva
Fundamentos de POV-Ray Computación Geométrica 2010/2011 Jorge Calvo Zaragoza Índice 1. Introducción 2. Fundamentos del trazado de rayos 3. Construcción de escenas con POV-Ray 4. Geometría sólida constructiva
102784 [20380] Visió per Computador Prueba 1 (2015) [A] Teoría (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada)
![102784 [20380] Visió per Computador Prueba 1 (2015) [A] Teoría (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada)](/thumbs/35/17261267.jpg "102784 [20380] Visió per Computador Prueba 1 (2015) [A] Teoría (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada)") 102784 [20380] Visió per Computador Prueba 1 (2015) [A] Teoría (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada) 1. El gap del silicio es de 1.11eV (salto energético entre banda de valencia
102784 [20380] Visió per Computador Prueba 1 (2015) [A] Teoría (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada) 1. El gap del silicio es de 1.11eV (salto energético entre banda de valencia
Precálculo 1 - Ejercicios de Práctica. 1. La pendiente de la línea (o recta) que pasa por los puntos P(2, -1) y Q(0, 3) es:
 que pasa por los puntos P(2, -1) y Q(0, 3) es:") Precálculo 1 - Ejercicios de Práctica 1. La pendiente de la línea (o recta) que pasa por los puntos P(2, -1) y Q(0, 3) es: a. 2 b. 1 c. 0 d. 1 2. La ecuación de la línea (recta) con pendiente 2/5 e intercepto
Precálculo 1 - Ejercicios de Práctica 1. La pendiente de la línea (o recta) que pasa por los puntos P(2, -1) y Q(0, 3) es: a. 2 b. 1 c. 0 d. 1 2. La ecuación de la línea (recta) con pendiente 2/5 e intercepto
Geometría del Espacio. Física Geográfica. Licenciatura de Humanidades. Febrero-Mayo,
 Geometría del Espacio. Física Geográfica. Licenciatura de Humanidades. Febrero-Mayo, 2007. 42 Índice. 1. Superficies. 2. El espacio eucĺıdeo tridimensional. Coordenadas Cartesianas. 3. Distancia entre
Geometría del Espacio. Física Geográfica. Licenciatura de Humanidades. Febrero-Mayo, 2007. 42 Índice. 1. Superficies. 2. El espacio eucĺıdeo tridimensional. Coordenadas Cartesianas. 3. Distancia entre
ESTÁTICA 3 3 VECTORES
 ESTÁTICA Sesión 3 3 VECTORES 3.1. Componentes en dos dimensiones 3.1.1. Operación con vectores por sus componentes 3.1.2. Vectores de posición por sus componentes 3.2. Componentes en tres dimensiones 3.2.1.
ESTÁTICA Sesión 3 3 VECTORES 3.1. Componentes en dos dimensiones 3.1.1. Operación con vectores por sus componentes 3.1.2. Vectores de posición por sus componentes 3.2. Componentes en tres dimensiones 3.2.1.
ÁLGEBRA Y GEOMETRÍA ANALÍTICA Trabajo Práctico Nº 5 Recta y Plano Cursada 2014
 ÁLGEBRA Y GEOMETRÍA ANALÍTICA Trabajo Práctico Nº Recta Plano Cursada Desarrollo Temático de la Unidad La recta en el plano: su determinación. Distintas formas de la ecuación de la recta a partir de la
ÁLGEBRA Y GEOMETRÍA ANALÍTICA Trabajo Práctico Nº Recta Plano Cursada Desarrollo Temático de la Unidad La recta en el plano: su determinación. Distintas formas de la ecuación de la recta a partir de la
Bolilla 12: Óptica Geométrica
 Bolilla 12: Óptica Geométrica 1 Bolilla 12: Óptica Geométrica Los contenidos de esta bolilla están relacionados con los principios primarios que rigen el comportamiento de los instrumentos ópticos. La
Bolilla 12: Óptica Geométrica 1 Bolilla 12: Óptica Geométrica Los contenidos de esta bolilla están relacionados con los principios primarios que rigen el comportamiento de los instrumentos ópticos. La
El medir y las Cantidades Físicas escalares y vectores en física. Prof. R. Nitsche C. Física Medica UDO Bolívar
 El medir y las Cantidades Físicas escalares y vectores en física Prof. R. Nitsche C. Física Medica UDO Bolívar Medir Medir es el requisito de toda ciencia empírica (experimental); medir significa simplemente
El medir y las Cantidades Físicas escalares y vectores en física Prof. R. Nitsche C. Física Medica UDO Bolívar Medir Medir es el requisito de toda ciencia empírica (experimental); medir significa simplemente
Unidad V. 5.1 Recta tangente y recta normal a una curva en un punto. Curvas ortogonales.
 Unidad V Aplicaciones de la derivada 5.1 Recta tangente y recta normal a una curva en un punto. Curvas ortogonales. Una tangente a una curva es una recta que toca la curva en un solo punto y tiene la misma
Unidad V Aplicaciones de la derivada 5.1 Recta tangente y recta normal a una curva en un punto. Curvas ortogonales. Una tangente a una curva es una recta que toca la curva en un solo punto y tiene la misma
Figura Trabajo de las fuerzas eléctricas al desplazar en Δ la carga q.
 1.4. Trabajo en un campo eléctrico. Potencial Clases de Electromagnetismo. Ariel Becerra Al desplazar una carga de prueba q en un campo eléctrico, las fuerzas eléctricas realizan un trabajo. Este trabajo
1.4. Trabajo en un campo eléctrico. Potencial Clases de Electromagnetismo. Ariel Becerra Al desplazar una carga de prueba q en un campo eléctrico, las fuerzas eléctricas realizan un trabajo. Este trabajo
Corrección de bordes en imágenes de rango por medio de un algoritmo genético
 Corrección de bordes en imágenes de rango por medio de un algoritmo genético Idanis B. Díaz* y John W. Branch** Resumen En este artículo se propone un método que permite completar y mejorar los bordes
Corrección de bordes en imágenes de rango por medio de un algoritmo genético Idanis B. Díaz* y John W. Branch** Resumen En este artículo se propone un método que permite completar y mejorar los bordes
Aplicación: cálculo de áreas XII APLICACIÓN: CÁLCULO DE ÁREAS
 XII APLICACIÓN: CÁLCULO DE ÁREAS El estudiante, hasta este momento de sus estudios, está familiarizado con el cálculo de áreas de figuras geométricas regulares a través del uso de fórmulas, como el cuadrado,
XII APLICACIÓN: CÁLCULO DE ÁREAS El estudiante, hasta este momento de sus estudios, está familiarizado con el cálculo de áreas de figuras geométricas regulares a través del uso de fórmulas, como el cuadrado,
Mecánica de Fluidos. Análisis Diferencial
 Mecánica de Fluidos Análisis Diferencial Análisis Diferencial: Descripción y caracterización del flujo en función de la descripción de una partícula genérica del flujo. 1. Introducción 2. Movimiento de
Mecánica de Fluidos Análisis Diferencial Análisis Diferencial: Descripción y caracterización del flujo en función de la descripción de una partícula genérica del flujo. 1. Introducción 2. Movimiento de
Mapa Curricular: Funciones y Modelos
 A.PR.11.2.1 Determina el dominio y el alcance de las funciones a partir de sus diferentes representaciones. A.PR.11.2.2 Identifica y aplica las relaciones entre los puntos importantes de una función (ceros,
A.PR.11.2.1 Determina el dominio y el alcance de las funciones a partir de sus diferentes representaciones. A.PR.11.2.2 Identifica y aplica las relaciones entre los puntos importantes de una función (ceros,
Matemáticas. Si un error simple ha llevado a un problema más sencillo se disminuirá la puntuación.
 UNIVERSIDAD POLITÉCNICA DE CARTAGENA PRUEBAS DE ACCESO A LA UNIVERSIDAD DE LOS MAYORES DE 25 AÑOS CONVOCATORIA 2014 CRITERIOS DE EVALUACIÓN Matemáticas GENERALES: El examen constará de dos opciones (dos
UNIVERSIDAD POLITÉCNICA DE CARTAGENA PRUEBAS DE ACCESO A LA UNIVERSIDAD DE LOS MAYORES DE 25 AÑOS CONVOCATORIA 2014 CRITERIOS DE EVALUACIÓN Matemáticas GENERALES: El examen constará de dos opciones (dos
Equilibrio de fuerzas Σ F z = 0. Σ M y = 0 Σ M x = 0 Σ M z = 0. Equilibrio de momentos. Segunda ley de Newton (masa)
") Estática: leyes de Newton: equilibrio, masa, acción y reacción Primera ley de Newton (equilibrio) Un cuerpo permanece en reposo o en movimiento rectilíneo uniforme (M.R.U. = velocidad constante) si la
Estática: leyes de Newton: equilibrio, masa, acción y reacción Primera ley de Newton (equilibrio) Un cuerpo permanece en reposo o en movimiento rectilíneo uniforme (M.R.U. = velocidad constante) si la
Evaluación de algoritmos de visión estereoscópica para un sistema de reconocimiento de la mano
 ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA DE TELECOMUNICACIÓN UNIVERSIDAD POLITÉCNICA DE CARTAGENA Proyecto Fin de Carrera Evaluación de algoritmos de visión estereoscópica para un sistema de reconocimiento
ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA DE TELECOMUNICACIÓN UNIVERSIDAD POLITÉCNICA DE CARTAGENA Proyecto Fin de Carrera Evaluación de algoritmos de visión estereoscópica para un sistema de reconocimiento
GIMNASIO VIRTUAL SAN FRANCISCO JAVIER Valores y Tecnología para la Formación Integral del Ser Humano UNIDAD I FUNCIONES
 UNIDAD I FUNCIONES Una función es una correspondencia entre dos conjuntos, que asocia a cada elemento del primer conjunto exactamente un elemento del otro conjunto. Una función f definida entre dos conjuntos
UNIDAD I FUNCIONES Una función es una correspondencia entre dos conjuntos, que asocia a cada elemento del primer conjunto exactamente un elemento del otro conjunto. Una función f definida entre dos conjuntos
Unidad II. 2.1 Concepto de variable, función, dominio, condominio y recorrido de una función.
 Unidad II Funciones 2.1 Concepto de variable, función, dominio, condominio y recorrido de una función. Función En matemática, una función (f) es una relación entre un conjunto dado X (llamado dominio)
Unidad II Funciones 2.1 Concepto de variable, función, dominio, condominio y recorrido de una función. Función En matemática, una función (f) es una relación entre un conjunto dado X (llamado dominio)
Contenidos mínimos Criterios de evaluación Ejemplos de preguntas
 Contenidos mínimos Criterios de evaluación Ejemplos de preguntas 1º ESO Números naturales, enteros y decimales: operaciones elementales. Fracciones: operaciones elementales. Potencias de exponente natural.
Contenidos mínimos Criterios de evaluación Ejemplos de preguntas 1º ESO Números naturales, enteros y decimales: operaciones elementales. Fracciones: operaciones elementales. Potencias de exponente natural.
Capítulo 6 Filtrado en el Dominio de la Frecuencia
 Capítulo 6 Filtrado en el Dominio de la Frecuencia...39 6. Método en el Dominio de la Frecuencia...39 6. Filtros Espaciales en la frecuencia...40 6.. Convolución Lineal y la Transformada Discreta de Fourier...45
Capítulo 6 Filtrado en el Dominio de la Frecuencia...39 6. Método en el Dominio de la Frecuencia...39 6. Filtros Espaciales en la frecuencia...40 6.. Convolución Lineal y la Transformada Discreta de Fourier...45
D1 Generalidades: El punto
 El sistema diédrico D1 Generalidades: El punto Generalidades Proyección ortogonal de un punto sobre un plano Proyección ortogonal o, simplemente proyección de un punto sobre un plano, es el pie de la perpendicular
El sistema diédrico D1 Generalidades: El punto Generalidades Proyección ortogonal de un punto sobre un plano Proyección ortogonal o, simplemente proyección de un punto sobre un plano, es el pie de la perpendicular
CÁLCULO INTEGRAL TEMARIO
 CÁLCULO INTEGRAL TEMARIO 1. LA INTEGRAL 1.1 La integral indefinida Antiderivadas o primitivas. Funciones con la misma derivada. Antiderivada general. Antiderivada particular. Integral indefinida. Elementos
CÁLCULO INTEGRAL TEMARIO 1. LA INTEGRAL 1.1 La integral indefinida Antiderivadas o primitivas. Funciones con la misma derivada. Antiderivada general. Antiderivada particular. Integral indefinida. Elementos
Introducción. Cuerpo Rígido. Mecánica Racional 20 TEMA 4: Cinemática de los Cuerpos Rígidos.
 Introducción. La cinemática de cuerpos rígidos estudia las relaciones existentes entre el tiempo, las posiciones, las velocidades y las aceleraciones de las diferentes partículas que forman un cuerpo rígido.
Introducción. La cinemática de cuerpos rígidos estudia las relaciones existentes entre el tiempo, las posiciones, las velocidades y las aceleraciones de las diferentes partículas que forman un cuerpo rígido.
Tema 2: Vectores libres
 Tema 2: Vectores libres FISICA I, 1º Grado en Ingeniería Aeroespacial Escuela Técnica Superior de Ingeniería Universidad de Sevilla 1 Índice Magnitudes escalares y vectoriales Definición de vector Vectores
Tema 2: Vectores libres FISICA I, 1º Grado en Ingeniería Aeroespacial Escuela Técnica Superior de Ingeniería Universidad de Sevilla 1 Índice Magnitudes escalares y vectoriales Definición de vector Vectores
Método de cuadrados mínimos
 REGRESIÓN LINEAL Gran parte del pronóstico estadístico del tiempo está basado en el procedimiento conocido como regresión lineal. Regresión lineal simple (RLS) Describe la relación lineal entre dos variables,
REGRESIÓN LINEAL Gran parte del pronóstico estadístico del tiempo está basado en el procedimiento conocido como regresión lineal. Regresión lineal simple (RLS) Describe la relación lineal entre dos variables,
Visión. Sesión 4: Búsqueda y tracking de modelos 2D en imágenes. Departamento CCIA http://www.jtech.ua.es/vision/2011/
 Visión Sesión 4: Búsqueda y tracking de modelos 2D en imágenes Departamento CCIA http://www.jtech.ua.es/vision/2011/ Hoy Detección de aristas Transformada de Hough Componentes conectadas Alineación de
Visión Sesión 4: Búsqueda y tracking de modelos 2D en imágenes Departamento CCIA http://www.jtech.ua.es/vision/2011/ Hoy Detección de aristas Transformada de Hough Componentes conectadas Alineación de
Visión. Sesión 3: Clasificación de imágenes mediante histogramas y características. Departamento CCIA
 Visión Sesión 3: Clasificación de imágenes mediante histogramas y características Departamento CCIA http://www.jtech.ua.es/vision/2011/ Hoy Aplicaciones: emparejamiento de imágenes, búsqueda de patrones
Visión Sesión 3: Clasificación de imágenes mediante histogramas y características Departamento CCIA http://www.jtech.ua.es/vision/2011/ Hoy Aplicaciones: emparejamiento de imágenes, búsqueda de patrones
2.2 Rectas en el plano
 2.2 Al igual que ocurre con el punto, en geometría intrínseca, el concepto de recta no tiene definición, sino que constituye otro de sus conceptos iniciales, indefinibles. Desde luego se trata de un conjunto
2.2 Al igual que ocurre con el punto, en geometría intrínseca, el concepto de recta no tiene definición, sino que constituye otro de sus conceptos iniciales, indefinibles. Desde luego se trata de un conjunto
Repaso de conceptos de álgebra lineal
 MÉTODOS AVANZADOS EN APRENDIZAJE ARTIFICIAL: TEORÍA Y APLICACIONES A PROBLEMAS DE PREDICCIÓN Manuel Sánchez-Montañés Luis Lago Ana González Escuela Politécnica Superior Universidad Autónoma de Madrid Repaso
MÉTODOS AVANZADOS EN APRENDIZAJE ARTIFICIAL: TEORÍA Y APLICACIONES A PROBLEMAS DE PREDICCIÓN Manuel Sánchez-Montañés Luis Lago Ana González Escuela Politécnica Superior Universidad Autónoma de Madrid Repaso
Ejercicios Resueltos de Cálculo III.
 Ejercicios Resueltos de Cálculo III. 1.- Considere y. a) Demuestre que las rectas dadas se cortan. Encuentre el punto de intersección. b) Encuentre una ecuación del plano que contiene a esas rectas. Como
Ejercicios Resueltos de Cálculo III. 1.- Considere y. a) Demuestre que las rectas dadas se cortan. Encuentre el punto de intersección. b) Encuentre una ecuación del plano que contiene a esas rectas. Como
Capítulo 1 Vectores. 26 Problemas de selección - página 13 (soluciones en la página 99)
") Capítulo 1 Vectores 26 Problemas de selección - página 13 (soluciones en la página 99) 21 Problemas de desarrollo - página 22 (soluciones en la página 100) 11 1.A PROBLEMAS DE SELECCIÓN Sección 1.A Problemas
Capítulo 1 Vectores 26 Problemas de selección - página 13 (soluciones en la página 99) 21 Problemas de desarrollo - página 22 (soluciones en la página 100) 11 1.A PROBLEMAS DE SELECCIÓN Sección 1.A Problemas
CONTENIDOS MÍNIMOS SEPTIEMBRE. DEPARTAMENTO DE MATEMÁTICAS
 CONTENIDOS MÍNIMOS SEPTIEMBRE. DEPARTAMENTO DE MATEMÁTICAS CONTENIDOS MÍNIMOS MATEMÁTICAS 1º ESO U.D. 1 Números Naturales El conjunto de los números naturales. Sistema de numeración decimal. Aproximaciones
CONTENIDOS MÍNIMOS SEPTIEMBRE. DEPARTAMENTO DE MATEMÁTICAS CONTENIDOS MÍNIMOS MATEMÁTICAS 1º ESO U.D. 1 Números Naturales El conjunto de los números naturales. Sistema de numeración decimal. Aproximaciones
Campo Magnético en un alambre recto.
 Campo Magnético en un alambre recto. A.M. Velasco (133384) J.P. Soler (133380) O.A. Botina (133268) Departamento de física, facultad de ciencias, Universidad Nacional de Colombia Resumen. Se hizo pasar
Campo Magnético en un alambre recto. A.M. Velasco (133384) J.P. Soler (133380) O.A. Botina (133268) Departamento de física, facultad de ciencias, Universidad Nacional de Colombia Resumen. Se hizo pasar
2 o Bachillerato. Conceptos básicos
 Física 2 o Bachillerato Conceptos básicos Movimiento. Cambio de posición de un cuerpo respecto de un punto que se toma como referencia. Cinemática. Parte de la Física que estudia el movimiento de los cuerpos
Física 2 o Bachillerato Conceptos básicos Movimiento. Cambio de posición de un cuerpo respecto de un punto que se toma como referencia. Cinemática. Parte de la Física que estudia el movimiento de los cuerpos
Índice. TEMA 11. Equipos de metrología dimensional Máquinas medidoras de formas. 1. Descripción de las máquinas medidoras de formas (MMF).
.") INTRODUCCIÓN A LA METROLOGÍA Curso Académico 2011-1212 Rafael Muñoz Bueno Laboratorio de Metrología y Metrotecnia LMM-ETSII-UPM TEMA 11. Equipos de metrología dimensional Máquinas medidoras de formas Índice
INTRODUCCIÓN A LA METROLOGÍA Curso Académico 2011-1212 Rafael Muñoz Bueno Laboratorio de Metrología y Metrotecnia LMM-ETSII-UPM TEMA 11. Equipos de metrología dimensional Máquinas medidoras de formas Índice
ROBÓTICA I. Cinemática Directa
 Cinemática Directa M. C. Jorge Luis Barahona Avalos 11 de abril de 2011 Universidad Tecnológica de la Mixteca Instituto de Electrónica y Mecatrónica 1 / 34 Índice General 1 Cinemática Directa 2 Cadena
Cinemática Directa M. C. Jorge Luis Barahona Avalos 11 de abril de 2011 Universidad Tecnológica de la Mixteca Instituto de Electrónica y Mecatrónica 1 / 34 Índice General 1 Cinemática Directa 2 Cadena
Seminario 3: Lentes, espejos y formación de imágenes
 Seminario 3: Lentes, espejos y ormación de imágenes Fabián Andrés Torres Ruiz Departamento de Física,, Chile 4 de Abril de 2007. Problemas. (Problema 8, capitulo 35,Física, Raymond A. Serway, las supericies
Seminario 3: Lentes, espejos y ormación de imágenes Fabián Andrés Torres Ruiz Departamento de Física,, Chile 4 de Abril de 2007. Problemas. (Problema 8, capitulo 35,Física, Raymond A. Serway, las supericies
Guía de Problemas. CINEMÁTICA de la MARCHA. Introducción
 Guía de Problemas CINEMÁICA de la MARCHA Introducción La Cinemática es una rama de la Mecánica que estudia el movimiento sin tomar en cuenta las fuerzas que lo originan. Para la descripción cinemática
Guía de Problemas CINEMÁICA de la MARCHA Introducción La Cinemática es una rama de la Mecánica que estudia el movimiento sin tomar en cuenta las fuerzas que lo originan. Para la descripción cinemática
Anexo 4. Herramientas Estadísticas
 Anexo 4 Herramientas Estadísticas La estadística descriptiva es utilizada como una herramienta para describir y analizar las características de un conjunto de datos, así como las relaciones que existen
Anexo 4 Herramientas Estadísticas La estadística descriptiva es utilizada como una herramienta para describir y analizar las características de un conjunto de datos, así como las relaciones que existen
GUÍA DE ESTUDIO PARA EL EXAMEN EXTRAORDINARIO DE GEOMETRÍA ANALÍTICA
 ESCUELA PREPARATORIA OFICIAL No. 268 GUÍA DE ESTUDIO PARA EL EXAMEN EXTRAORDINARIO DE GEOMETRÍA ANALÍTICA Profra: Citlalli Artemisa García García 1) Qué es la pendiente? 2) Cómo es la pendiente de rectas
ESCUELA PREPARATORIA OFICIAL No. 268 GUÍA DE ESTUDIO PARA EL EXAMEN EXTRAORDINARIO DE GEOMETRÍA ANALÍTICA Profra: Citlalli Artemisa García García 1) Qué es la pendiente? 2) Cómo es la pendiente de rectas
MATEMÁTICAS APLICADAS A LAS C.C. SOCIALES
 MATEMÁTICAS APLICADAS A LAS C.C. SOCIALES CAPÍTULO 4 Curso preparatorio de la prueba de acceso a la universidad para mayores de 25 años curso 2010/11 Nuria Torrado Robles Departamento de Estadística Universidad
MATEMÁTICAS APLICADAS A LAS C.C. SOCIALES CAPÍTULO 4 Curso preparatorio de la prueba de acceso a la universidad para mayores de 25 años curso 2010/11 Nuria Torrado Robles Departamento de Estadística Universidad
TAREA N 3 OPERADORES DE DETECCIÓN DE BORDES
 Universidad de Chile Facultad de Ciencias Físicas y Matemáticas Departamento de Ingeniería Eléctrica EL7007 Introducción al Procesamiento Digital de Imágenes TAREA N 3 OPERADORES DE DETECCIÓN DE BORDES
Universidad de Chile Facultad de Ciencias Físicas y Matemáticas Departamento de Ingeniería Eléctrica EL7007 Introducción al Procesamiento Digital de Imágenes TAREA N 3 OPERADORES DE DETECCIÓN DE BORDES
Volumen de Sólidos de Revolución
 60 CAPÍTULO 4 Volumen de Sólidos de Revolución 6 Volumen de sólidos de revolución Cuando una región del plano de coordenadas gira alrededor de una recta l, se genera un cuerpo geométrico denominado sólido
60 CAPÍTULO 4 Volumen de Sólidos de Revolución 6 Volumen de sólidos de revolución Cuando una región del plano de coordenadas gira alrededor de una recta l, se genera un cuerpo geométrico denominado sólido
RECONOCIMIENTO E IDENTIFICACIÓN DE LOGOTIPOS EN IMÁGENES CON TRANSFORMADA SIFT
 UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR INGENIERÍA TÉCNICA DE TELECOMUNICACIÓN (ESPECIALIDAD EN SONIDO E IMAGEN) PROYECTO FIN DE CARRERA RECONOCIMIENTO E IDENTIFICACIÓN DE LOGOTIPOS
UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR INGENIERÍA TÉCNICA DE TELECOMUNICACIÓN (ESPECIALIDAD EN SONIDO E IMAGEN) PROYECTO FIN DE CARRERA RECONOCIMIENTO E IDENTIFICACIÓN DE LOGOTIPOS
Repaso de Vectores. Autor: Dra. Estela González. flecha. La longitud de la línea indica la magnitud del vector, y su
 Autor: Dra. Estela González Algunas cantidades físicas como tiempo, temperatura, masa, densidad y carga eléctrica se pueden describir plenamente con un número y una unidad, pero otras cantidades (también
Autor: Dra. Estela González Algunas cantidades físicas como tiempo, temperatura, masa, densidad y carga eléctrica se pueden describir plenamente con un número y una unidad, pero otras cantidades (también
1 SISTEMAS DE ECUACIONES LINEALES. MÉTODO DE GAUSS
 1 SISTEMAS DE ECUACIONES LINEALES. MÉTODO DE GAUSS 1.1 SISTEMAS DE ECUACIONES LINEALES Una ecuación lineal es una ecuación polinómica de grado 1, con una o varias incógnitas. Dos ecuaciones son equivalentes
1 SISTEMAS DE ECUACIONES LINEALES. MÉTODO DE GAUSS 1.1 SISTEMAS DE ECUACIONES LINEALES Una ecuación lineal es una ecuación polinómica de grado 1, con una o varias incógnitas. Dos ecuaciones son equivalentes
Interpretación geométrica de la derivada
 Interpretación geométrica de la derivada El matemático francés ierre de Fermat (60 665) al estudiar máimos mínimos de ciertas funciones observó que en aquellos puntos en los que la curva presenta un máimo
Interpretación geométrica de la derivada El matemático francés ierre de Fermat (60 665) al estudiar máimos mínimos de ciertas funciones observó que en aquellos puntos en los que la curva presenta un máimo
Estadística Espacial en Ecología del Paisaje
 Estadística Espacial en Ecología del Paisaje Introducción H. Jaime Hernández P. Facultad de Ciencias Forestales U. de Chile Tipos de datos en análisis espacial Patrones espaciales puntuales Muestras geoestadísticas
Estadística Espacial en Ecología del Paisaje Introducción H. Jaime Hernández P. Facultad de Ciencias Forestales U. de Chile Tipos de datos en análisis espacial Patrones espaciales puntuales Muestras geoestadísticas
BLOQUE 2 : GEOMETRÍA
 BLOQUE 2 : GEOMETRÍA EJERCICIO 1 Dado el plano Л : x + 2y z = 2, el punto P( 2,3,2) perteneciente al plano Л y la recta r de ecuación:, a) Determina la posición relativa de r y Л. b) Calcula la ecuación
BLOQUE 2 : GEOMETRÍA EJERCICIO 1 Dado el plano Л : x + 2y z = 2, el punto P( 2,3,2) perteneciente al plano Л y la recta r de ecuación:, a) Determina la posición relativa de r y Л. b) Calcula la ecuación
Anejo 1. Teoría de Airy. Solución lineal de la ecuación de ondas.
 Anejo 1. Teoría de Airy. Solución lineal de la ecuación de ondas. Introducción y ecuaciones que rigen la propagación del oleaje. La propagación de oleaje en un fluido es un proceso no lineal. Podemos tratar
Anejo 1. Teoría de Airy. Solución lineal de la ecuación de ondas. Introducción y ecuaciones que rigen la propagación del oleaje. La propagación de oleaje en un fluido es un proceso no lineal. Podemos tratar
Práctica 2 - Procesamiento de Imágenes
 Práctica 2 - Procesamiento de Imágenes En esta práctica veremos diferentes técnicas de tratamiento que suelen ser aplicadas a las imágenes obtenidas desde satélites. Muchos de los procedimientos que aprendamos
Práctica 2 - Procesamiento de Imágenes En esta práctica veremos diferentes técnicas de tratamiento que suelen ser aplicadas a las imágenes obtenidas desde satélites. Muchos de los procedimientos que aprendamos
EL SISTEMA DE COORDENADAS UTM
 EL SISTEMA DE COORDENADAS UTM Apellidos, nombre Departamento Centro Ibáñez Asensio, Sara (sibanez@prv.upv.es) Gisbert Blanquer, Juan Manuel (jgisbert@prv.upv.es) Moreno Ramón, Héctor (hecmora@prv.upv.es)
EL SISTEMA DE COORDENADAS UTM Apellidos, nombre Departamento Centro Ibáñez Asensio, Sara (sibanez@prv.upv.es) Gisbert Blanquer, Juan Manuel (jgisbert@prv.upv.es) Moreno Ramón, Héctor (hecmora@prv.upv.es)
UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBA DE ACCESO A LAS ENSEÑANZAS UNIVERSITARIAS OFICIALES DE GRADO OPCIÓN A
 UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBA DE ACCESO A LAS ENSEÑANZAS UNIVERSITARIAS OFICIALES DE GRADO MATERIA: DIBUJO TÉCNICO II Curso 2009-2010 INSTRUCCIONES GENERALES Y VALORACIÓN La prueba
UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBA DE ACCESO A LAS ENSEÑANZAS UNIVERSITARIAS OFICIALES DE GRADO MATERIA: DIBUJO TÉCNICO II Curso 2009-2010 INSTRUCCIONES GENERALES Y VALORACIÓN La prueba
SISTEMA DIÉDRICO. Introducción
 Introducción SISTEMA DIÉDRICO El Sistema Diédrico o de Monge es un Sistema de Representación sobre el plano de cuerpos y elementos geométricos del espacio. Emplea la proyección cilíndrica ortogonal según
Introducción SISTEMA DIÉDRICO El Sistema Diédrico o de Monge es un Sistema de Representación sobre el plano de cuerpos y elementos geométricos del espacio. Emplea la proyección cilíndrica ortogonal según
REDUCCIÓN DEL RUIDO EN UNA IMAGEN DIGITAL
 Div. Ingeniería de Sistemas y Automática Universidad Miguel Hernández REDUCCIÓN DEL RUIDO EN UNA IMAGEN DIGITAL Tabla de Contenidos Definición Filtros No Lineales Filtros Temporales Definición 3 G = Ruido:
Div. Ingeniería de Sistemas y Automática Universidad Miguel Hernández REDUCCIÓN DEL RUIDO EN UNA IMAGEN DIGITAL Tabla de Contenidos Definición Filtros No Lineales Filtros Temporales Definición 3 G = Ruido:
Sistemas de Sensación Segmentación, Reconocimiento y Clasificación de Objetos. CI-2657 Robótica M.Sc. Kryscia Ramírez Benavides
 Sistemas de Sensación Segmentación, Reconocimiento y Clasificación de Objetos CI-2657 Robótica M.Sc. Kryscia Ramírez Benavides Introducción La visión artificial, también conocida como visión por computador
Sistemas de Sensación Segmentación, Reconocimiento y Clasificación de Objetos CI-2657 Robótica M.Sc. Kryscia Ramírez Benavides Introducción La visión artificial, también conocida como visión por computador
1.- Diagrama de barras
 1.- Diagrama de barras Un diagrama de barras se utiliza para de presentar datos cualitativos o datos cuantitativos de tipo discreto (variables tipo II). Se representan sobre unos ejes de coordenadas, en
1.- Diagrama de barras Un diagrama de barras se utiliza para de presentar datos cualitativos o datos cuantitativos de tipo discreto (variables tipo II). Se representan sobre unos ejes de coordenadas, en
Estadística Inferencial. Estadística Descriptiva
 INTRODUCCIÓN Estadística: Ciencia que trata sobre la teoría y aplicación de métodos para coleccionar, representar, resumir y analizar datos, así como realizar inferencias a partir de ellos. Recogida y
INTRODUCCIÓN Estadística: Ciencia que trata sobre la teoría y aplicación de métodos para coleccionar, representar, resumir y analizar datos, así como realizar inferencias a partir de ellos. Recogida y
APUNTES CARTOGRÁFICOS. Sistemas de coordenadas: Universal Transversal Mercator y Gauss-Krüger
 APUNTES CARTOGRÁFICOS Sistemas de coordenadas: Universal Transversal Mercator y Gauss-Krüger CÁTEDRA CARTOGRAFÍA UNIVERSIDAD NACIONAL DE LA PATAGONIA SAN JUAN BOSCO Agosto 2012 CARACTERÍSTICAS DE LAS COORDENADAS
APUNTES CARTOGRÁFICOS Sistemas de coordenadas: Universal Transversal Mercator y Gauss-Krüger CÁTEDRA CARTOGRAFÍA UNIVERSIDAD NACIONAL DE LA PATAGONIA SAN JUAN BOSCO Agosto 2012 CARACTERÍSTICAS DE LAS COORDENADAS
Tema 6: Morfología. Primera parte
 Tema 6: Morfología Primera parte Morfología La morfología matemática se basa en operaciones de teoría de conjuntos. En el caso de imágenes binarias, los conjuntos tratados son subconjuntos de Z 2 y en
Tema 6: Morfología Primera parte Morfología La morfología matemática se basa en operaciones de teoría de conjuntos. En el caso de imágenes binarias, los conjuntos tratados son subconjuntos de Z 2 y en
Z Optima X 1 + X 2 5 Z 1 -X 1 + 2X Región factible. Figura 1
 Método Gráfico El procedimiento geométrico, es únicamente adecuado para resolver problemas muy pequeños (con no más de dos variables debido al problema de dimensionalidad). Este método provee una gran
Método Gráfico El procedimiento geométrico, es únicamente adecuado para resolver problemas muy pequeños (con no más de dos variables debido al problema de dimensionalidad). Este método provee una gran
Capítulo 4 Exploración del ambiente.
 Capítulo 4 Exploración del ambiente. Para explorar el ambiente se tomó como base el vehículo explorador de Braitenberg, la idea es tomar este comportamiento y adaptarlo al uso de una cámara de video, esto
Capítulo 4 Exploración del ambiente. Para explorar el ambiente se tomó como base el vehículo explorador de Braitenberg, la idea es tomar este comportamiento y adaptarlo al uso de una cámara de video, esto
Electromagnetismo I. Semestre: TAREA 1 Y SU SOLUCIÓN Dr. A. Reyes-Coronado
 Electromagnetismo I Semestre: 01- TAREA 1 Y SU SOLUCIÓN Dr. A. Reyes-Coronado Solución por Carlos Andrés Escobar Ruí 1.- Problema: (5pts) (a) Doce cargas iguales q se encuentran localiadas en los vérices
Electromagnetismo I Semestre: 01- TAREA 1 Y SU SOLUCIÓN Dr. A. Reyes-Coronado Solución por Carlos Andrés Escobar Ruí 1.- Problema: (5pts) (a) Doce cargas iguales q se encuentran localiadas en los vérices
TEMA 5: Vistas en 3D
 TEMA 5: Vistas en 3D Índice. Proecciones. Proección Paralela 2. Proección Perspectiva 2. Transformación de Vista. Introducción 2. Parametros de vista 3. Obtención de los vectores del nuevo sistema 4. Construcción
TEMA 5: Vistas en 3D Índice. Proecciones. Proección Paralela 2. Proección Perspectiva 2. Transformación de Vista. Introducción 2. Parametros de vista 3. Obtención de los vectores del nuevo sistema 4. Construcción
TRANSFORMACIONES ISOMÉTRICAS
 TRANSFORMACIONES ISOMÉTRICAS En una transformación isométrica: 1) No se altera la forma ni el tamaño de la figura. 2) Sólo cambia la posición (orientación o sentido de ésta). TRANSFORMACIONES ISOMÉTRICAS
TRANSFORMACIONES ISOMÉTRICAS En una transformación isométrica: 1) No se altera la forma ni el tamaño de la figura. 2) Sólo cambia la posición (orientación o sentido de ésta). TRANSFORMACIONES ISOMÉTRICAS