Sergio Alberino, Pablo D. Folino,
|
|
|
- César Alvarado Maestre
- hace 6 años
- Vistas:
Transcripción





1 IV Seminario de Inteligencia Artificial y Robótica Análisis i de estabilidad d del Control dewma-pid Sergio Alberino, Pablo D. Folino, Claudio Verrastro, Juan Carlos Gomez alberino@gmail.com; pfolino@gmail.com; cverra@cae.cnea.gov.ar; juanca@inti.gob.ar Ilustración: Hernán Juárez JuanCaJuanCa



2 PMIR: Plataforma Móvil de Inspección Robotizada Plataforma para la experimentación de Hardware y algoritmos de control. Reproducible y de bajo costo.







3 PMIR En 2010 se incorporó a la Plataforma un brazo mecánico de 5 grados de libertad
4 Placas de desarrollo Las placas se pueden poner y sacar fácilmente en los distintos SLOTS del RACK y hasta pueden reprogramarse in situ.



5 Control de motores: Placa de desarrollo Control de motores de corriente continua, con microcontrolador, por medio de Modulación de Ancho de Pulsos (PWM)



6 Diagrama del control de posición
7 Control de posición: Respuesta al Escalón Unitario Transitorio Permanente
 + K/Ti e(t) dt + K.Td.")

8 Ecuaciones del lpid P.I.D. (Proporcional Integral Derivativo) y(t) = K.e(t) + K/Ti e(t) dt + K.Td. d(e(t))/dt, Referencias: K = Constante del control proporcional. Td = Contante tiempo diferencial. Ti = Constante de tiempo de integración. e(t)= Error de posición (salida actual salida deseada).
9 Ventajas del lpid P.I.D. (Proporcional Integral Derivativo) Las partes Proporcional y derivativa aumentan la estabilidad La parte derivativa mejora la velocidad de respuesta La parte integral aumenta la exactitud al reducir el error en el estado permanente
10 P.I.D. Discreto y[n]= K. e[n] + K/Ti. i[n] + K Td. d[n] d[n] = (e[n] - e[n-1])/ts i[n] = Ts.Σ e[n] e[n]: e[n-1]: i[n]: d[n]: Ts : Error de posición (pos. actual pos.deseada). Error de posición del ciclo anterior. Sumatoria de los errores de posición. Diferencia de los errores de posición. Intervalo de muestreo.
11 Problema: Efecto Wind-up Como el termino integral se calcula como acumulación de muestras, cuando el sistema se encuentra lejos del valor de consigna esta suma puede saturar y producir un efecto denominado Wind-up. La mayoría de los controladores PID incluyen métodos denominados anti Wind-up para evitar este efecto, habilitando la integral solo cuando el sistema se encuentra cerca del valor de consigna (SET POINT)





12 Control de caudal Caudalímetro ruidoso
13 Problema: Oscilaciones indeseadas Al calcularse el término derivativo como diferencia entre error actual y el anterior, en presencia de ruido se producen saltos en el valor de la derivada. d[n] = (e[n] - e[n-1])/ts
14 Solución: Usar solo P-I Utilizar solo un PI, eliminando la Derivada. Pero de esa manera se pierden las ventajas propias del término derivativo: Reducción del sobre-impulso y del tiempo de establecimiento
15 Solución: filtro PasaBajos El filtro reduce las oscilaciones, pero disminuye también el tiempo de respuesta y puede afectar a la estabilidad del sistema.
16 Filtrado dinámico
17 Promedio Móvil Ponderado Exponencialmente Exponentially Weighted Moving Average (EWMA) Donde las muestras mas recientes tienen una ponderación mayor que las antiguas Este promedio móvil tiene características de un filtro pasa bajos
18 Promedio Móvil Ponderado Exponencialmente Ej: N=10 y K=1 El retardo introducido por el filtro será τ = N. Ts

.")
19 Características del error Se supone Ruido superpuesto a la señal de entrada de tipo Gaussiano, con valor medio cero y varianza σ 2 conocida (o estimada). A la salida del un filtro EWMA de Longitud N resulta
20 Solución Propuesta Controlador dewma-pid Filtrado de longitud variable según el estado en que se encuentra el sistema
21 Solución propuesta: dewma-pid Transitorio Permanente
22 Controlador dewma-pid
23 La variable proporcional P[n] La variable derivativa D[n] D[n] = P [n] - P [n-1]
24 La variable Integral I[n] Donde I[n], Para N=1 (transitorio) Para N>>1 (permanente) I[n] e I[n] Np.e Por lo que funciona como una sumatoria acotada
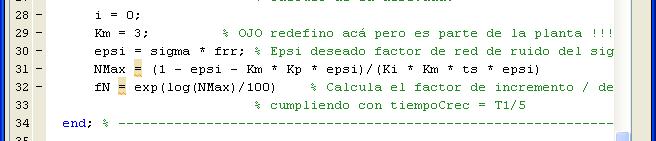
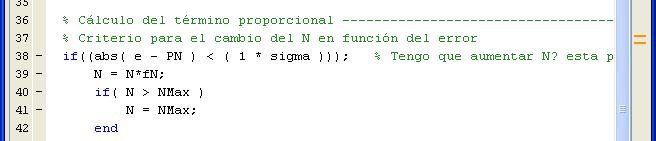
25 Criterio de cambio de Np Donde σ es el desvío estándar del ruido y fn es el factor de adaptación con Donde σ es el desvío estándar del ruido y fn es el factor de adaptación con el cual se incrementa o decrementa Np (Se usa 1.01 a 1.1, pero puede ser 2)
26 En régimen transitorio: PD En régimen transitorio Np tiende a la unidad : N 1 U[t]= (Kp + Ki ). e[n] + Kd. (e[n]-e[n-1]) K
27 En régimen permanente En el régimen permanente Np crece y el término derivativo se hace despreciable. Para un error ξ, pequeño pq y distinto de cero, y Ts=1 queda: U[s]= (Kp + Ki. Np). ξ,


28 Estabilidad
29 Análisis de Estabilidad Las fórmulas recursivas simplifican la implementación en el microcontrolador, pero dificulta el estudio de la estabilidad con las herramientas clásicas de análisis, por lo que se procedió a expresar la función de transferencia en términos de la frecuencia discreta z.
30 Análisis de Estabilidad Para el análisis de la estabilidad del sistema se considera una planta de segundo orden genérica (con dos polos, Pp1 y Pp2, representados en el plano Z)
31 Análisis de Estabilidad Para el análisis de la estabilidad del sistema se con-sidera una planta de segundo orden genérica éi (con dos polos, Pp1 y Pp2, representados en el plano Z) e(z)
32 Criterio de Jury Permite determinar la existencia de raíces inestables, sin tener que hallar el valor numérico de esas raíces. Para que el sistema sea estable todas las raíces del polinomio característico deben estar dentro del círculo unitario (Criterio de Schur-Cohn).
33 Ecuaciones
34 Análisis Gráfico de la Estabilidad
35 Controladores múltiples Es condición necesaria para asegurar la estabilidad global del sistema (aunque no suficiente), verificar que cada bloque controlador, por separado, no presenta inestabilidad al actuar sobre la planta que se desea controlar.
36 Estabilidad en el sentido de Lyapunov En 1892, el matemático yfísico ruso Alexander Mikhailovich Lyapunov, propone que un sistema es estable si toda condición inicial finita origina una trayectoria acotada, es decir, si la energía se disipa continuamente el sistema se estabiliza en un punto de equilibrio 36
37 Estabilidad en el sentido de Lyapunov Modelo de Variable Estado 37
38 Estabilidad en el sentido de Lyapunov 38
39 Estabilidad en el sentido de Lyapunov + Positiva - Negativa Para hallar la solución para esta ecuación se suele fijar Q como una matriz hermítica positiva, como puede ser la matriz Identidad (I), y a partir de allí determinar los coeficientes de P. 39
40 Estabilidad en el sentido de Lyapunov P =[ 1/2*(-1+a2)^2/(-a3+a2*a3+a1), -1/2*(-3*a3+3*a2*a3+2*a1)/(-a3+a2*a3+a1), 1/2*(-1+a2)/(-a3+a2*a3+a1)] [-1/2*(-a3+a2*a3+2*a1)/(-a3+a2*a3+a1), -1/2*a3^2/(-a3+a2*a3+a1), 1/2*a3/(-a3+a2*a3+a1)] [1/2*(-1+a2)/(-a3+a2*a3+a1), -1/2*a3/(-a3+a2*a3+a1), 1/2/(-a3+a2*a3+a1)]; Debe ser: DET(P) = 1/2/ (a3 - a2.a3 - a1) > 0 DET(P)N = ½.N2 / ( -P1.P2. N 2 + P1.P2.N - N.Ko.Kd + P1 2.N2.P2-2. P1 2.N.P2 + P1.N.Ko.Kd + P1 2.P2 - P1.Ko.Kd + P2 2. N2.P1 2.P2 2.N.P1 + P2.N.Ko.Kd + P1.P2 2 Ko.Kd.P2 + P1 2.P2 2. N 2 - P1 2.P2 2.N + 2.P1.P2.N.Ko.Kd Ko.Kd.P1.P2 + Ko2.Kd2 - P1* N 2 P2* N 2 - N 2 + N) > 0 40

 Nmax Nmax 41")
41 Estabilidad en el sentido de Lyapunov el determinante de P depende de: P=f(Pp1 = f (Pp1, Pp2, Ko, Kd, N) Nmax Nmax 41


42 Conclusiones
43 Conclusiones Se presentó un método de control basado en un filtro EWMA con una constante de promediación (N) que se modifica dinámicamente (dewma) y toma un valor pequeño para el régimen transitorio, aumentando a medida que el sistema evoluciona hacia el valor de consigna. La constante de promediación N puede utilizarse como indicador del estado del sistema.
44 Conclusiones El análisis para distintos valores de N indica que se mantendrá estable si se cumplen las condiciones presentadas (Determinación de un Nmaximo) El nivel de promediación variable garantiza a su vez que de darse una condición de inestabilidad, el sistema evolucionará hacia un valor de N que garantice la estabilidad, si es que el sistema es estable con un controlador PD (N=1).
45 Preguntas? 45
46 Modelo en simulink



47 Bloque definido por el usuario
48 Rutina en pseudo C % Cálculo del término proporcional if((abs( e ) < ( 1.5 * sigma ))); % Tengo que aumentar N? N = N*fN; if( N > NMax ) N = NMax; end else if((abs( e ) > ( 3 * sigma ))); % Tengo que disminuir N? N = N/fN; if( N < 1 ) N = 1; end end; end; PN = PN + (e - PN)/N; % Cálculo del término derivativo d=pn-pnanterior; % Cálculo del término integral Ni = N; i = i + (e )- (i/ni); % DEWMAPID y = Kp * PN + Kd * d/ts+ Ki * i* ts; % calcula la acción de control.
49 Dinámicos: Parámetros para la comparación Tiempo de crecimiento (Rise Time) Tiempo de establecimiento (Settling Time), Sobre-impulso (Overshoot) Estáticos: Error en el régimen permanente (Steady State Error), Índice de Fletcher & Powell: (performance)
50 Parámetros para la comparación




51 Salida del sistema
52 Salida del sistema




53 Salida del sistema
54 Salida del Controlador
55 Salida del Controlador
56 comparación
57 comparación x 2 X 10 3
58 Resultados Experimentales
59 Resultados Experimentales Se realizaron mediciones desde la placa de control utilizando un dewma PID y un PID clásico ajustados experimentalmente sobre la misma planta. Los datos son enviado cada 20mseg a un software de PC que los representa gráficamente. El ruido de medición es simulado por medio de una p función RANDOM, en el microcontrolador de la placa de control.
60 Banco de prueba
61 Interfaz para medición
62 PID clásico En rojo: Posición En Azul: salida del controlador En Verde: N
63 dewma PID
64 PID clásico con ruido
65 dewma PID con ruido
66 Mas Conclusiones La constante de promediación N puede utilizarse como indicador del estado del sistema. sste Se logra un menor desgaste de los actuadores mecánicos junto con un ahorro de energía (menor consumo de la batería). Se hace innecesaria una rutina anti-wind-up
Criterios de Sintonización y Estabilidad del Control dewma-pid. Instituto Universitario de la Policía Federal Argentina (IUPFA) 3
 3") XIV Reunión de Trabajo Procesamiento de la Información y Control -- RPIC 2011, pp. 96-101, 2011. Criterios de Sintonización y Estabilidad del Control dewma-pid Sergio Alberino 1,2, Pablo D. Folino 1, Claudio
XIV Reunión de Trabajo Procesamiento de la Información y Control -- RPIC 2011, pp. 96-101, 2011. Criterios de Sintonización y Estabilidad del Control dewma-pid Sergio Alberino 1,2, Pablo D. Folino 1, Claudio
Grupo de Inteligencia Artificial UTN-FRBA, Buenos Aires, Argentina,
 Control PID con Filtro Dinámico de Promedios Móviles Ponderados Exponencialmente (dewma-pid) Claudio Verrastro 1,2, Juan Carlos Gómez 2,3, Pablo D. Folino 2, Sergio Alberino 2,4 1 CNEA, Centro Atómico
Control PID con Filtro Dinámico de Promedios Móviles Ponderados Exponencialmente (dewma-pid) Claudio Verrastro 1,2, Juan Carlos Gómez 2,3, Pablo D. Folino 2, Sergio Alberino 2,4 1 CNEA, Centro Atómico
Control PID con esquema adaptivo de filtrado de ruido
 Control PID con esquema adaptivo de filtrado de ruido Claudio Verrastro, Sergio Alberino y Pablo Folino Grupo de Inteligencia Artificial UTN-FRBA, Buenos Aires, Argentina CNEA, Centro Atómico Ezeiza cverra@cae.cnea.gov.ar
Control PID con esquema adaptivo de filtrado de ruido Claudio Verrastro, Sergio Alberino y Pablo Folino Grupo de Inteligencia Artificial UTN-FRBA, Buenos Aires, Argentina CNEA, Centro Atómico Ezeiza cverra@cae.cnea.gov.ar
MODOS O ACCIONES DEL CONTROLADOR
 MODOS O ACCIONES DEL CONTROLADOR El modo o acción del controlador es la relación que existe entre el error e(t) que es la señal de entrada y la orden al actuador u(t), señal de salida. O sea es como responde
MODOS O ACCIONES DEL CONTROLADOR El modo o acción del controlador es la relación que existe entre el error e(t) que es la señal de entrada y la orden al actuador u(t), señal de salida. O sea es como responde
VARIANTE EN EL ALGORITMO PID PARA EVITAR EL USO DE UN GENERADOR DE TRAYECTORIA TRAPEZOIDAL
 VARIANTE EN EL ALGORITMO PID PARA EVITAR EL USO DE UN GENERADOR DE TRAYECTORIA TRAPEZOIDAL Sergio ALBERINO Pablo FOLINO Claudio VERRASTRO Grupo de Inteligencia Artificial Universidad Tecnológica Nacional
VARIANTE EN EL ALGORITMO PID PARA EVITAR EL USO DE UN GENERADOR DE TRAYECTORIA TRAPEZOIDAL Sergio ALBERINO Pablo FOLINO Claudio VERRASTRO Grupo de Inteligencia Artificial Universidad Tecnológica Nacional
TEORÍA DE CONTROL CONTROLADOR PID
 TEORÍA DE CONTROL CONTROLADOR PID Historia del controlador PID. Nicolás Minorsky 1922 Nicolás Minorsky había analizado las propiedades de los controladores tipo PID en su publicación Estabilidad direccional
TEORÍA DE CONTROL CONTROLADOR PID Historia del controlador PID. Nicolás Minorsky 1922 Nicolás Minorsky había analizado las propiedades de los controladores tipo PID en su publicación Estabilidad direccional
ANÁLISIS Y DISEÑO DE SISTEMAS DE CONTROL PARA ROBOTS
 ANÁLISIS Y DISEÑO DE SISTEMAS DE CONTROL PARA ROBOTS 1. INTRODUCCIÓN. 2. SISTEMAS REALIMENTADOS EN RÉGIMEN PERMANENTE 2.1 Error de posición 2.2 Error de velocidad 2.3 Conclusiones y Aplicación al Diseño
ANÁLISIS Y DISEÑO DE SISTEMAS DE CONTROL PARA ROBOTS 1. INTRODUCCIÓN. 2. SISTEMAS REALIMENTADOS EN RÉGIMEN PERMANENTE 2.1 Error de posición 2.2 Error de velocidad 2.3 Conclusiones y Aplicación al Diseño
TSTC. Dpt. Teoría de la Señal, Telemática y Comunicaciones. Robótica Industrial. Universidad de Granada
 Dpt. Teoría de la Señal, Telemática y Comunicaciones Robótica Industrial Universidad de Granada Tema 5: Análisis y Diseño de Sistemas de Control para Robots S.0 S.1 Introducción Sistemas Realimentados
Dpt. Teoría de la Señal, Telemática y Comunicaciones Robótica Industrial Universidad de Granada Tema 5: Análisis y Diseño de Sistemas de Control para Robots S.0 S.1 Introducción Sistemas Realimentados
Sintonización de Controladores
 Sistemas de Control Automáticos Sintonización de Controladores Acciones de control Las acciones de los controladores las podemos clasificar como: Control discontínuo Control ON OFF Control contínuo Controles
Sistemas de Control Automáticos Sintonización de Controladores Acciones de control Las acciones de los controladores las podemos clasificar como: Control discontínuo Control ON OFF Control contínuo Controles
Unidad Temática 9: Análisis y Diseño de Sistemas de Control a Lazo Cerrado
 Control Automático Ing. Eléctrica Página 1 de 17 Unidad Temática 9: Análisis y Diseño de Sistemas de Control a Lazo Cerrado Algoritmos de Control: Un algoritmo de control se encarga de monitorear el valor
Control Automático Ing. Eléctrica Página 1 de 17 Unidad Temática 9: Análisis y Diseño de Sistemas de Control a Lazo Cerrado Algoritmos de Control: Un algoritmo de control se encarga de monitorear el valor
TECNICAS DE DISEÑO Y COMPENSACION
 TECNICAS DE DISEÑO Y COMPENSACION Técnicas para sistemas SISO invariantes en el tiempo Basadas en el lugar de las raices y respuesta en frecuencia Especificaciones de funcionamiento Exactitud o precisión
TECNICAS DE DISEÑO Y COMPENSACION Técnicas para sistemas SISO invariantes en el tiempo Basadas en el lugar de las raices y respuesta en frecuencia Especificaciones de funcionamiento Exactitud o precisión
TRABAJO PRÁCTICO Nº 4 Análisis temporal de sistemas en lazo Cerrado
 TRABAJO PRÁCTICO Nº 4 Análisis temporal de sistemas en lazo Cerrado OBJETIVOS: Analizar las características del comportamiento transitorio de sistemas en lazo cerrado con controladores. Manejar el concepto
TRABAJO PRÁCTICO Nº 4 Análisis temporal de sistemas en lazo Cerrado OBJETIVOS: Analizar las características del comportamiento transitorio de sistemas en lazo cerrado con controladores. Manejar el concepto
CONTROLADORES O REGULADORES PID. Prof. Gerardo Torres Sistemas de Control
 1 CONTROLADORES O REGULADORES PID INTRODUCCIÓN PID son los más utilizados en la industria. Son aplicados en general a la mayoría de los procesos. Pueden ser analógicos o digitales. Pueden ser electrónicos
1 CONTROLADORES O REGULADORES PID INTRODUCCIÓN PID son los más utilizados en la industria. Son aplicados en general a la mayoría de los procesos. Pueden ser analógicos o digitales. Pueden ser electrónicos
INSTITUTO TECNOLOGICO DE MERIDA
 INSTITUTO TECNOLOGICO DE MERIDA Equipo # Tema: Tipos De Controladores Integrantes: Perez Perez Cesar Interian Cauich Edwin Romero Bojorquez Roberto EL C E R E B R O DE T O D O S L O S S I S T E M A S
INSTITUTO TECNOLOGICO DE MERIDA Equipo # Tema: Tipos De Controladores Integrantes: Perez Perez Cesar Interian Cauich Edwin Romero Bojorquez Roberto EL C E R E B R O DE T O D O S L O S S I S T E M A S
Prefacio. 1 Sistemas de control
 INGENIERIA DE CONTROL por BOLTON Editorial Marcombo Prefacio 1 Sistemas de control Sistemas Modelos Sistemas en lazo abierto y cerrado Elementos básicos de un sistema en lazo abierto Elementos básicos
INGENIERIA DE CONTROL por BOLTON Editorial Marcombo Prefacio 1 Sistemas de control Sistemas Modelos Sistemas en lazo abierto y cerrado Elementos básicos de un sistema en lazo abierto Elementos básicos
Ingeniería de Control I Tema 11. Reguladores PID
 Ingeniería de Control I Tema 11 Reguladores PID 1 Tema 11. Reguladores PID Introducción Especificaciones de funcionamiento Acciones básicas de control Ajuste empírico de reguladores. Métodos de Ziegler-
Ingeniería de Control I Tema 11 Reguladores PID 1 Tema 11. Reguladores PID Introducción Especificaciones de funcionamiento Acciones básicas de control Ajuste empírico de reguladores. Métodos de Ziegler-
Salida = Valor deseado (referencia) Para todo el tiempo posible!!! jlc
 Para todo el tiempo posible!!! jlc") Control: Se debe lograr que unas variables de salida de un sistema se comporten de acuerdo a nuestro deseo. La fuerza del ego humana puesta al servicio de la ingeniería Salida = Valor deseado (referencia)
Control: Se debe lograr que unas variables de salida de un sistema se comporten de acuerdo a nuestro deseo. La fuerza del ego humana puesta al servicio de la ingeniería Salida = Valor deseado (referencia)
El comportamiento de un controlador PID corresponde a la superposición de estas tres acciones, expresado en el dominio del tiempo es:
 1.4.1 CONTROLADOR PID A continuación se hace una breve presentación del controlador PID clásico en el dominio continuo y a la vez que se mencionan los métodos de sintonización, de oscilaciones amortiguadas
1.4.1 CONTROLADOR PID A continuación se hace una breve presentación del controlador PID clásico en el dominio continuo y a la vez que se mencionan los métodos de sintonización, de oscilaciones amortiguadas
IQ57A: Dinámica y control de procesos Capítulo 3: Control Feedback
 IQ57A: Dinámica y control de procesos Capítulo 3: J. Cristian Salgado - jsalgado@ing.uchile.cl Departamento de Ingeniería Química y Biotecnología, Universidad de Chile September 23, 2008 Objetivos Al final
IQ57A: Dinámica y control de procesos Capítulo 3: J. Cristian Salgado - jsalgado@ing.uchile.cl Departamento de Ingeniería Química y Biotecnología, Universidad de Chile September 23, 2008 Objetivos Al final
Automatización de Procesos/Sistemas de Control Ing. Biomédica e Ing. Electrónica Capitulo V Controladores PID
 Automatización de Procesos/Sistemas de Control Ing. Biomédica e Ing. Electrónica Capitulo V Controladores PID D.U. Campos-Delgado Facultad de Ciencias UASLP Enero-Junio/2014 1 CONTENIDO Motivación Estructura
Automatización de Procesos/Sistemas de Control Ing. Biomédica e Ing. Electrónica Capitulo V Controladores PID D.U. Campos-Delgado Facultad de Ciencias UASLP Enero-Junio/2014 1 CONTENIDO Motivación Estructura
FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA LABORATORIO DE SISTEMAS DE CONTROL DISCRETO PRÁCTICA N 6 MODELACIÓN E INDENTIFICACIÓN DE UN MOTOR DC
 FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control LABORATORIO DE SISTEMAS DE CONTROL DISCRETO PRÁCTICA N 6 1. TEMA MODELACIÓN E INDENTIFICACIÓN DE UN MOTOR DC 2.
FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control LABORATORIO DE SISTEMAS DE CONTROL DISCRETO PRÁCTICA N 6 1. TEMA MODELACIÓN E INDENTIFICACIÓN DE UN MOTOR DC 2.
Retardo de transporte
 Retardo de transporte Escalón Escalón con retardo de transporte T Retardo de Transporte. Ejemplo de un Tiristor Tiempo Muerto Ángulo de Disparo (desde controlador) Pulso de disparo Nuevo Pulso de disparo
Retardo de transporte Escalón Escalón con retardo de transporte T Retardo de Transporte. Ejemplo de un Tiristor Tiempo Muerto Ángulo de Disparo (desde controlador) Pulso de disparo Nuevo Pulso de disparo
ESTABILIDAD. El procedimiento en el criterio de estabilidad de Routh es el siguiente: 1) Escriba el polinomio en s en la forma siguiente:
 Escriba el polinomio en s en la forma siguiente:") ESTABILIDAD Un sistema dinámico es estable si para cualquier entrada comprendida entre un límite superior y otro inferior la salida también resulta acotada sin importar las condiciones iniciales del sistema.
ESTABILIDAD Un sistema dinámico es estable si para cualquier entrada comprendida entre un límite superior y otro inferior la salida también resulta acotada sin importar las condiciones iniciales del sistema.
Control PID de Temperatura
 Control PID de Temperatura Esquema basico de control PID Reglas Euristicas de ajuste Reglas. Efecto Anti Windup Como la integral resulta de la sumatoria de los errores de cada ciclo, se corre el
Control PID de Temperatura Esquema basico de control PID Reglas Euristicas de ajuste Reglas. Efecto Anti Windup Como la integral resulta de la sumatoria de los errores de cada ciclo, se corre el
Unidad V Respuesta de los sistemas de control
 Unidad V Respuesta de los sistemas de control MC Nicolás Quiroz Hernández Un controlador automático compara el valor real de la salida de una planta con la entrada de referencia (el valor deseado), determina
Unidad V Respuesta de los sistemas de control MC Nicolás Quiroz Hernández Un controlador automático compara el valor real de la salida de una planta con la entrada de referencia (el valor deseado), determina
Capítulo 6: Diseño de controladores
 Capítulo 6: Diseño de controladores Capítulo 6: Diseño de controladores 6.1. Introducción El objetivo es el desarrollo de controladores para que la plataforma siga una trayectoria de referencia con independencia
Capítulo 6: Diseño de controladores Capítulo 6: Diseño de controladores 6.1. Introducción El objetivo es el desarrollo de controladores para que la plataforma siga una trayectoria de referencia con independencia
CONTROLADOR PID. Jorge Luis Mírez Tarrillo. Ing Mecánio Electricista Maestro en Ciencias mención Física
 CONTROLADOR PID Jorge Luis Mírez Tarrillo Ing Mecánio Electricista Maestro en Ciencias mención Física Es una estructura de control que es casi universalmente utilizada en la industria. Se trata de la familia
CONTROLADOR PID Jorge Luis Mírez Tarrillo Ing Mecánio Electricista Maestro en Ciencias mención Física Es una estructura de control que es casi universalmente utilizada en la industria. Se trata de la familia
EJERCICIOS DE LA UNIDAD DIDÁCTICA 1
 UNIVERSIDAD NACIONAL DE EDUCACIÓN A DISTANCIA Departamento de Ingeniería Eléctrica, Electrónica y de Control ASIGNATURA: TÉCNICAS AVANZADAS DE CONTROL E1.1 INTRODUCCIÓN EJERCICIOS DE LA UNIDAD DIDÁCTICA
UNIVERSIDAD NACIONAL DE EDUCACIÓN A DISTANCIA Departamento de Ingeniería Eléctrica, Electrónica y de Control ASIGNATURA: TÉCNICAS AVANZADAS DE CONTROL E1.1 INTRODUCCIÓN EJERCICIOS DE LA UNIDAD DIDÁCTICA
Universidad Tecnológica Nacional Facultad Regional Buenos Aires Grupo de Inteligencia Artificial y Robótica. Seminario IA y R
 Página 1 de 6 2 Control Electrónico de plataforma móvil y brazo robótico Ing. Sergio Alberino, Ing. Pablo Folino 2.1 Introducción El diseño y construcción de un carro de transporte de instrumental, autónomo
Página 1 de 6 2 Control Electrónico de plataforma móvil y brazo robótico Ing. Sergio Alberino, Ing. Pablo Folino 2.1 Introducción El diseño y construcción de un carro de transporte de instrumental, autónomo
Presentado por: Laura Katherine Gómez Mariño. Universidad Central
 Presentado por: Laura Katherine Gómez Mariño. Universidad Central IMPORTANCIA DEL TEMA ESCOGIDO: Es una herramienta usada en simulación, que es parte crucial en un sistema de control industrial. Un controlador
Presentado por: Laura Katherine Gómez Mariño. Universidad Central IMPORTANCIA DEL TEMA ESCOGIDO: Es una herramienta usada en simulación, que es parte crucial en un sistema de control industrial. Un controlador
INDICE Capitulo 1. Introducción Capitulo 2. Descripción matemática de señales 2.1. Introducción y objetivos
 INDICE Prefacio XIII Capitulo 1. Introducción 1 1.1. Definición de señales y sistemas 1 1.2. Tipos de señales 1 1.3. Ejemplo de una señal y un sistema 8 1.4. Uso de MATLAB 13 Capitulo 2. Descripción matemática
INDICE Prefacio XIII Capitulo 1. Introducción 1 1.1. Definición de señales y sistemas 1 1.2. Tipos de señales 1 1.3. Ejemplo de una señal y un sistema 8 1.4. Uso de MATLAB 13 Capitulo 2. Descripción matemática
Control PID. Ing. Esp. John Jairo Piñeros C.
 Control PID Ing. Esp. John Jairo Piñeros C. Control PID Ing. Esp. John Jairo Piñeros C. Que es PID? Variable Proporcional Variable Integral Variable Derivativa cuando se puede usar un controlador PI, PID?
Control PID Ing. Esp. John Jairo Piñeros C. Control PID Ing. Esp. John Jairo Piñeros C. Que es PID? Variable Proporcional Variable Integral Variable Derivativa cuando se puede usar un controlador PI, PID?
Tecnicas de diseño y compensación
 Capítulo 8 Tecnicas de diseño y compensación El objetivo primordial de esta sección es presentar algunos procedimientos para el diseño y compensación de sistemas de control lineales, invariantes en el
Capítulo 8 Tecnicas de diseño y compensación El objetivo primordial de esta sección es presentar algunos procedimientos para el diseño y compensación de sistemas de control lineales, invariantes en el
PRACTICA: MODOS DE CONTROL. Sistemas de Control y Controladores
 Universidad Nacional Experimental del Táchira. Departamento de Ingeniería Electrónica. Laboratorio de Instrumentación y Control, Código 02 33 905L. Profesor: Tito González. San Cristóbal, Jueves 04 de
Universidad Nacional Experimental del Táchira. Departamento de Ingeniería Electrónica. Laboratorio de Instrumentación y Control, Código 02 33 905L. Profesor: Tito González. San Cristóbal, Jueves 04 de
Determine la cantidad de polos en el semi plano izquierdo, fundamente. Determine el rango de valores de K para que el sistema sea estable.
 ESTABILIDAD 1 Un sistema con realimentación unitaria tiene la siguiente función de transferencia de la planta: ( s 1.)( s 0.5s ) Gp ( s) s.5s 1 a) Cuantos polos tiene en el semiplano derecho. b) Cuantos
ESTABILIDAD 1 Un sistema con realimentación unitaria tiene la siguiente función de transferencia de la planta: ( s 1.)( s 0.5s ) Gp ( s) s.5s 1 a) Cuantos polos tiene en el semiplano derecho. b) Cuantos
- ACCIONES DE CONTROL -
 CÁTEDRA: SISTEMAS DE CONTROL (PLAN 2004) DOCENTE: Prof. Ing. Mec. Marcos A. Golato - ACCIONES DE CONTROL - 1 ACCIÓN DE CONTROL - DEFINICIÓN: ES LA CARACTERÍSTICA, MODO O ALGORITMO, CON EL CUAL EL CONTROLADOR
CÁTEDRA: SISTEMAS DE CONTROL (PLAN 2004) DOCENTE: Prof. Ing. Mec. Marcos A. Golato - ACCIONES DE CONTROL - 1 ACCIÓN DE CONTROL - DEFINICIÓN: ES LA CARACTERÍSTICA, MODO O ALGORITMO, CON EL CUAL EL CONTROLADOR
Factory Automation. Regulación con programa de PLC
 Factory Automation Regulación con programa de PLC 1. Funciones PID + TPO PLCs: : Introducción PID con dos grados de libertad Cuando se previene el sobrepasamiento con un control PID simple se ralentiza
Factory Automation Regulación con programa de PLC 1. Funciones PID + TPO PLCs: : Introducción PID con dos grados de libertad Cuando se previene el sobrepasamiento con un control PID simple se ralentiza
Capítulo 5: CONTROL INVERSO ADAPTATIVO
 Capítulo 5: CONTROL INVERSO INTRODUCCIÓN 5.. INTRODUCCIÓN Un sistema de control inverso adaptativo se muestra en la Figura 5. Si el controlador fuese ideal, su función de transferencia sería: C( z) M (
Capítulo 5: CONTROL INVERSO INTRODUCCIÓN 5.. INTRODUCCIÓN Un sistema de control inverso adaptativo se muestra en la Figura 5. Si el controlador fuese ideal, su función de transferencia sería: C( z) M (
Universidad de Oviedo. Realimentación. Tema 3. Sistemas Automáticos
 Realimentación Tema 3 1 Índice Ventajas Inconvenientes El regulador todo-nada El regulador PID Funciones de Sensibilidad 2 Lazo típico de realimentación Perturbaciones p i (t) Señal de Mando Referencia
Realimentación Tema 3 1 Índice Ventajas Inconvenientes El regulador todo-nada El regulador PID Funciones de Sensibilidad 2 Lazo típico de realimentación Perturbaciones p i (t) Señal de Mando Referencia
En la Clase 3, se demostró que cualquier señal discreta x[n] puede escribirse en términos de impulsos como sigue:
![En la Clase 3, se demostró que cualquier señal discreta x[n] puede escribirse en términos de impulsos como sigue:](/thumbs/75/72732918.jpg "En la Clase 3, se demostró que cualquier señal discreta x[n] puede escribirse en términos de impulsos como sigue:") SISTEMAS LINEALES INVARIANTES EN EL TIEMPO (SISTEMAS LTI) Un sistema lineal invariante en el tiempo, el cual será referido en adelante por la abreviatura en inglés de Linear Time Invariant Systems como
SISTEMAS LINEALES INVARIANTES EN EL TIEMPO (SISTEMAS LTI) Un sistema lineal invariante en el tiempo, el cual será referido en adelante por la abreviatura en inglés de Linear Time Invariant Systems como
TEORIA DE CONTROL CAPITULO 9: ESPECIFICACIONES Y AJUSTES DE CONTROLADORES
 CAPITULO 9: ESPECIFICACIONES Y AJUSTES DE CONTROLADORES 10.1 Especificaciones en Diseño En muchos casos las características o exigencias impuestas en un sistema de control, están dadas desde el punto de
CAPITULO 9: ESPECIFICACIONES Y AJUSTES DE CONTROLADORES 10.1 Especificaciones en Diseño En muchos casos las características o exigencias impuestas en un sistema de control, están dadas desde el punto de
Lazo de control por realimentación (retroalimentación o feedback)
") Lazo de control por realimentación (retroalimentación o feedback) Objetivo Minimizar el error (diferencia entre la consigna y la variable controlada) para que su valor sea lo más próximo a cero. Estructura
Lazo de control por realimentación (retroalimentación o feedback) Objetivo Minimizar el error (diferencia entre la consigna y la variable controlada) para que su valor sea lo más próximo a cero. Estructura
Universidad Simón Bolívar Departamento de Procesos y Sistemas
 Universidad Simón Bolívar Departamento de Procesos y Sistemas Guía de Ejercicios de Sistemas de Control I PS-3 Prof. Alexander Hoyo Junio 00 http://prof.usb.ve/ahoyo ahoyo@usb.ve ÍNDICE Pág. Modelaje Matemático
Universidad Simón Bolívar Departamento de Procesos y Sistemas Guía de Ejercicios de Sistemas de Control I PS-3 Prof. Alexander Hoyo Junio 00 http://prof.usb.ve/ahoyo ahoyo@usb.ve ÍNDICE Pág. Modelaje Matemático
CAPÍTULO 5. Pruebas y Resultados
 CAPÍTULO 5 Pruebas y Resultados 5 Pruebas y Resultados Con este capítulo se concluye el proceso de automatización de la planta piloto de tipo industrial, se presentan las pruebas y resultados del sistema
CAPÍTULO 5 Pruebas y Resultados 5 Pruebas y Resultados Con este capítulo se concluye el proceso de automatización de la planta piloto de tipo industrial, se presentan las pruebas y resultados del sistema
1. Implementación de Controladores
 . Implementación de Controladores. IMPLEMENTACIÓN DE CONTROLADORES..... INTRODUCCIÓN..... PROBLEMAS NUMÉRICOS...... Fuentes de error:...... Longitud de Palabra... 3..3. Redondeo... 3.3. REALIZACIÓN DE
. Implementación de Controladores. IMPLEMENTACIÓN DE CONTROLADORES..... INTRODUCCIÓN..... PROBLEMAS NUMÉRICOS...... Fuentes de error:...... Longitud de Palabra... 3..3. Redondeo... 3.3. REALIZACIÓN DE
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
 PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ FACULTAD DE CIENCIAS E INGENIERÍA DISEÑO DEL CONTROL DE TEMPERATURA DEL PORTASUSTRATO DE UNA CÁMARA DE ALTO VACÍO PARA ELABORAR PELÍCULAS SEMICONDUCTORAS DELGADAS
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ FACULTAD DE CIENCIAS E INGENIERÍA DISEÑO DEL CONTROL DE TEMPERATURA DEL PORTASUSTRATO DE UNA CÁMARA DE ALTO VACÍO PARA ELABORAR PELÍCULAS SEMICONDUCTORAS DELGADAS
Sistemas de Control. UNIVERSIDAD NACIONAL DE INGENIERIA Facultad de Electrotecnia y Computación. Docente: Alejandro A Méndez T
 UNIVERSIDAD NACIONAL DE INGENIERIA Facultad de Electrotecnia y Computación Docente: Alejandro T 2009 Prof. Titular FEC - UNI Sistemas de Control Asistente: Yamil O Jiménez L Programa PIED VRAC - UNI Diseño
UNIVERSIDAD NACIONAL DE INGENIERIA Facultad de Electrotecnia y Computación Docente: Alejandro T 2009 Prof. Titular FEC - UNI Sistemas de Control Asistente: Yamil O Jiménez L Programa PIED VRAC - UNI Diseño
XI. COMPENSACIÓN UTILIZANDO EL LUGAR GEOMÉTRICO DE LAS RAÍCES
 XI. COMPENSACIÓN UTILIZANDO EL LUGAR GEOMÉTRICO DE LAS RAÍCES El lugar geométrico de las raíces representa la ubicación de las raíces de la ecuación característica a lazo cerrado cuando se varía un parámetro
XI. COMPENSACIÓN UTILIZANDO EL LUGAR GEOMÉTRICO DE LAS RAÍCES El lugar geométrico de las raíces representa la ubicación de las raíces de la ecuación característica a lazo cerrado cuando se varía un parámetro
Seminario de Procesamiento Digital de Señales
 Seminario de Procesamiento Digital de Señales Unidad 5: Diseño de Filtros Digitales - Parte I Marcelo A. Pérez Departamento Electrónica Universidad Técnica Federico Santa María Contenidos 1 Conceptos Básicos
Seminario de Procesamiento Digital de Señales Unidad 5: Diseño de Filtros Digitales - Parte I Marcelo A. Pérez Departamento Electrónica Universidad Técnica Federico Santa María Contenidos 1 Conceptos Básicos
SINTONIZACIÓN DE CONTROLADORES INDUSTRIALES
 FACULTAD DE CIENCAS EXACTAS Y TECNOLOGIA DEPARTAMENTO DE INGENIERÍA MECÁNICA CÁTEDRA: SISTEMAS DE CONTROL (PLAN 2004) DOCENTE: Prof. Ing. Mec. Marcos A. Golato SINTONIZACIÓN DE CONTROLADORES INDUSTRIALES
FACULTAD DE CIENCAS EXACTAS Y TECNOLOGIA DEPARTAMENTO DE INGENIERÍA MECÁNICA CÁTEDRA: SISTEMAS DE CONTROL (PLAN 2004) DOCENTE: Prof. Ing. Mec. Marcos A. Golato SINTONIZACIÓN DE CONTROLADORES INDUSTRIALES
Control Automático DIAPOSITIVAS. Dr. Roberto Cárdenas Dobson Profesor de la Asignatura
 Control Automático DIAPOSITIVAS Dr. Roberto Cárdenas Dobson Profesor de la Asignatura Sistema de Control Interconexión de componentes, que en su conjunto, presenta un comportamiento deseado. Asume relaciones
Control Automático DIAPOSITIVAS Dr. Roberto Cárdenas Dobson Profesor de la Asignatura Sistema de Control Interconexión de componentes, que en su conjunto, presenta un comportamiento deseado. Asume relaciones
CURSO CONTROL APLICADO- MARCELA VALLEJO VALENCIA-ITM RESPUESTA EN EL TIEMPO
 RESPUESTA EN EL TIEMPO BUENO, YA TENGO UN MODELO MATEMÁTICO. Y AHORA QUÉ? Vamos a analizar el comportamiento del sistema. ENTRADA PLANTA SALIDA NO SE COMO VA A SER. NO LO PUEDO PREDECIR. NO LA PUEDO DESCRIBIR
RESPUESTA EN EL TIEMPO BUENO, YA TENGO UN MODELO MATEMÁTICO. Y AHORA QUÉ? Vamos a analizar el comportamiento del sistema. ENTRADA PLANTA SALIDA NO SE COMO VA A SER. NO LO PUEDO PREDECIR. NO LA PUEDO DESCRIBIR
Departamento de Ingeniería Eléctrica y Electrónica. Guía de Prácticas de Laboratorio. Materia: Control I. Laboratorio de Ingeniería Electrónica
 Instituto Tecnológico de Querétaro Departamento de Ingeniería Eléctrica y Electrónica Guía de Prácticas de Laboratorio Materia: Control I Laboratorio de Ingeniería Electrónica Santiago de Querétaro, Qro.
Instituto Tecnológico de Querétaro Departamento de Ingeniería Eléctrica y Electrónica Guía de Prácticas de Laboratorio Materia: Control I Laboratorio de Ingeniería Electrónica Santiago de Querétaro, Qro.
Tutorial de controladores PID
 Page 1 of 8 Tutorial de controladores PID Introduccion El controlador de 3 terminos Las caracteristicas de los controladores P, I y D Problema Ejemplo Respuesta de Lazo Abierto al escalon Control Proporcional
Page 1 of 8 Tutorial de controladores PID Introduccion El controlador de 3 terminos Las caracteristicas de los controladores P, I y D Problema Ejemplo Respuesta de Lazo Abierto al escalon Control Proporcional
Análisis temporal de sistemas
 Control de Procesos Industriales 3. Análisis temporal de sistemas por Pascual Campoy Universidad Politécnica Madrid Control de Procesos Industriales 1 Análisis temporal de sistemas Estabilidad y ganancia
Control de Procesos Industriales 3. Análisis temporal de sistemas por Pascual Campoy Universidad Politécnica Madrid Control de Procesos Industriales 1 Análisis temporal de sistemas Estabilidad y ganancia
PRACTICA: CONTROL PID. Sistemas de Control y Controladores
 Universidad Nacional Experimental del Táchira. Departamento de Ingeniería Electrónica. Núcleo de Instrumentación y Control. Redactor: Prof. Tito González. Revisor: San Cristóbal, Miércoles 05 de Noviembre
Universidad Nacional Experimental del Táchira. Departamento de Ingeniería Electrónica. Núcleo de Instrumentación y Control. Redactor: Prof. Tito González. Revisor: San Cristóbal, Miércoles 05 de Noviembre
Ejercicios III SISTEMAS AUTOMÁTICOS Y DE CONTROL
 Ejercicios III SISTEMAS AUTOMÁTICOS Y DE CONTROL 1. Determina el diagrama de bloques del sistema automático de control de líquido de la figura. Determina de nuevo el diagrama de bloques suponiendo que
Ejercicios III SISTEMAS AUTOMÁTICOS Y DE CONTROL 1. Determina el diagrama de bloques del sistema automático de control de líquido de la figura. Determina de nuevo el diagrama de bloques suponiendo que
ANEXO 2. Realizado: Versión: Páginas: Grupo SUPPRESS Laboratorio Remoto de Automática (LRA-ULE) Universidad de León
 Universidad de León") ANEXO 2 Realizado: Grupo SUPPRESS (Supervisión, Control y Automatización) Laboratorio Remoto de Automática (LRA-ULE) Universidad de León http://lra.unileon.es Versión: Páginas: 1.0 6 1. El Controlador
ANEXO 2 Realizado: Grupo SUPPRESS (Supervisión, Control y Automatización) Laboratorio Remoto de Automática (LRA-ULE) Universidad de León http://lra.unileon.es Versión: Páginas: 1.0 6 1. El Controlador
SINTONIZACION DE UN CONTROLADOR PID PARA FUNCION DE TRANSFERENCIA DE SEGUNDO ORDEN USANDO ALGORITMOS GENETICOS BASADO EN TOOLBOX DE MATLAB.
 1 SINTONIZACION DE UN CONTROLADOR PID PARA FUNCION DE TRANSFERENCIA DE SEGUNDO ORDEN USANDO ALGORITMOS GENETICOS BASADO EN TOOLBOX DE MATLAB. Fredy Alexander Guasmayan Guasmayan Cedula: 14 590 212 Universidad
1 SINTONIZACION DE UN CONTROLADOR PID PARA FUNCION DE TRANSFERENCIA DE SEGUNDO ORDEN USANDO ALGORITMOS GENETICOS BASADO EN TOOLBOX DE MATLAB. Fredy Alexander Guasmayan Guasmayan Cedula: 14 590 212 Universidad
Control automático con herramientas interactivas
 1 El proyecto de fichas interactivas Objetivo del libro 2 Explicar de forma interactiva conceptos básicos de un curso de introducción al control automático y facilitar al recién llegado su aprendizaje
1 El proyecto de fichas interactivas Objetivo del libro 2 Explicar de forma interactiva conceptos básicos de un curso de introducción al control automático y facilitar al recién llegado su aprendizaje
10/10/2011. Servomecanismo de posicionamiento de las cabezas de lectura escritura de un disco duro. Pistas de datos Sentido de giro de los discos
 //2 Margen de desplazamiento de las cabezas Pistas con referencia de posición del brazo Cabezas de lectura-escritura Brazo motor de las cabezas Pistas de datos Sentido de giro de los discos Amplificadores
//2 Margen de desplazamiento de las cabezas Pistas con referencia de posición del brazo Cabezas de lectura-escritura Brazo motor de las cabezas Pistas de datos Sentido de giro de los discos Amplificadores
Determinar el comportamiento transitorio y estacionario del sistema. Especificar e identificar las condiciones de operación
 Análisis de estabilidad Determinar el comportamiento transitorio y estacionario del sistema Especificar e identificar las condiciones de operación El primer paso al analizar un sistema de control es establecer
Análisis de estabilidad Determinar el comportamiento transitorio y estacionario del sistema Especificar e identificar las condiciones de operación El primer paso al analizar un sistema de control es establecer
Control Automático. Regulador PID y ajuste del PID. Eduardo Interiano
 Control Automático Regulador PID y ajuste del PID Eduardo Interiano Contenido Regulador PID PID ideal PID real Ajuste empírico del PID (Ziegler-Nichol Ejemplos Ejercicios Referencias 2 El PID ideal El
Control Automático Regulador PID y ajuste del PID Eduardo Interiano Contenido Regulador PID PID ideal PID real Ajuste empírico del PID (Ziegler-Nichol Ejemplos Ejercicios Referencias 2 El PID ideal El
INDICE 1. Mecatrónica 2. Sensores y Transductores 3. Acondicionamientos de señales 4. Sistema de Presentación de Datos
 INDICE Prefacio Xi 1. Mecatrónica 1.1. Que es la mecatrónica? 1 1.2. Sistemas 2 1.3. Sistemas de medición 2 1.4. Sistemas de control 3 1.5. Controladores basados en un microprocesador 11 1.6. Enfoque de
INDICE Prefacio Xi 1. Mecatrónica 1.1. Que es la mecatrónica? 1 1.2. Sistemas 2 1.3. Sistemas de medición 2 1.4. Sistemas de control 3 1.5. Controladores basados en un microprocesador 11 1.6. Enfoque de
Controlador PID con anti-windup
 Laboratorio de Control de Procesos Industriales Práctica 1 Controlador PID con anti-windup 1 de noviembre de 2008 Introducción 2 INTRODUCCIÓN REGULADORES PID La idea básica del controlador PID es simple
Laboratorio de Control de Procesos Industriales Práctica 1 Controlador PID con anti-windup 1 de noviembre de 2008 Introducción 2 INTRODUCCIÓN REGULADORES PID La idea básica del controlador PID es simple
Plataforma de contenidos interactivos. Página Web del libro. Mecatrónica Introducción Origen de la mecatrónica 5
 Contenido Plataforma de contenidos interactivos XXI Página Web del libro XXII Prólogo XXVII Capítulo 1 Mecatrónica 1 1.1 Introducción 3 1.2 Origen de la mecatrónica 5 1.2.1 Qué es mecatrónica? 9 Mecatrónica
Contenido Plataforma de contenidos interactivos XXI Página Web del libro XXII Prólogo XXVII Capítulo 1 Mecatrónica 1 1.1 Introducción 3 1.2 Origen de la mecatrónica 5 1.2.1 Qué es mecatrónica? 9 Mecatrónica
1. Análisis de Sistemas Discretos
 . Análisis de Sistemas Discretos. Análisis de Sistemas Discretos.. Introducción.. Estabilidad... Estabilidad de Sistemas Lineales 3... Estabilidad de Sistemas con Entrada y Salida Acotadas(BIBO) 4..3.
. Análisis de Sistemas Discretos. Análisis de Sistemas Discretos.. Introducción.. Estabilidad... Estabilidad de Sistemas Lineales 3... Estabilidad de Sistemas con Entrada y Salida Acotadas(BIBO) 4..3.
Lugar Geométrico de las Raíces Herramienta para diseño de sistemas de control
 Lugar Geométrico de las Raíces Herramienta para diseño de sistemas de control Elizabeth Villota Curso: Ingeniería de Control (MT221) Facultad de Ingeniería Mecánica UNI-FIM 1 Modelado Modelo: representación
Lugar Geométrico de las Raíces Herramienta para diseño de sistemas de control Elizabeth Villota Curso: Ingeniería de Control (MT221) Facultad de Ingeniería Mecánica UNI-FIM 1 Modelado Modelo: representación
CONTENIDOS DOCENTES DE AUTOMÁTICA EN LA UNIVERSIDAD MIGUEL HERNÁNDEZ
 DE AUTOMÁTICA EN LA UNIVERSIDAD MIGUEL HERNÁNDEZ UNIVERSIDAD MIGUEL HERNÁNDEZ MATERIAS A TRATAR Regulación Automática Robótica Automatización Industrial TITULACIONES Ingeniero Industrial Ingeniero de Telecomunicación
DE AUTOMÁTICA EN LA UNIVERSIDAD MIGUEL HERNÁNDEZ UNIVERSIDAD MIGUEL HERNÁNDEZ MATERIAS A TRATAR Regulación Automática Robótica Automatización Industrial TITULACIONES Ingeniero Industrial Ingeniero de Telecomunicación
Álvaro Andrés Velásquez T. Depto. de Ciencias Básicas Septiembre de 2009
 Álvaro Andrés Velásquez T. Depto. de Ciencias Básicas Septiembre de 2009 Estructura de un curso teórico práctico básico de ciencias Estructura de un curso teórico práctico con proyecto de materia Importancia
Álvaro Andrés Velásquez T. Depto. de Ciencias Básicas Septiembre de 2009 Estructura de un curso teórico práctico básico de ciencias Estructura de un curso teórico práctico con proyecto de materia Importancia
Acciones básicas de control Clasificación de los controles automáticos
 Acciones básicas de control Clasificación de los controles automáticos 1. Control de dos posiciones o de si-no 2. Controles proporcionales (P) 3. Controles proporcionales e integrales (PI) 4. Controles
Acciones básicas de control Clasificación de los controles automáticos 1. Control de dos posiciones o de si-no 2. Controles proporcionales (P) 3. Controles proporcionales e integrales (PI) 4. Controles
Tema 6 Control de sistemas de orientación de antenas y de telescopios
 Tema 6 Control de sistemas de orientación de antenas y de telescopios. Métodos de control de sistemas de orientación 2. Métodos de ajuste de PIDs 3. Estudio de las perturbaciones 4. Técnicas y diseño de
Tema 6 Control de sistemas de orientación de antenas y de telescopios. Métodos de control de sistemas de orientación 2. Métodos de ajuste de PIDs 3. Estudio de las perturbaciones 4. Técnicas y diseño de
OBJETIVO DEL ACTUADOR. Regular el movimiento de un cuerpo que se debe trasladar controladamente de una posición a otra.
 OBJETIVO DEL ACTUADOR Regular el movimiento de un cuerpo que se debe trasladar controladamente de una posición a otra. El control del movimiento puede ser, según la aplicación: I.- Control de posición.
OBJETIVO DEL ACTUADOR Regular el movimiento de un cuerpo que se debe trasladar controladamente de una posición a otra. El control del movimiento puede ser, según la aplicación: I.- Control de posición.
LABORATORIO DE SISTEMAS DE CONTROL AUTOMÁTICO PRÁCTICA N 10
 ESCUELA POLITÉCNICA NACIONAL Campus Politécnico "J. Rubén Orellana R." FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control 1. TEMA LABORATORIO DE SISTEMAS DE CONTROL
ESCUELA POLITÉCNICA NACIONAL Campus Politécnico "J. Rubén Orellana R." FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control 1. TEMA LABORATORIO DE SISTEMAS DE CONTROL
Seguimiento i de objetos
 IV Seminario de Inteligencia Artificial y Robótica Seguimiento i de objetos con Filtros de Partículas Franco Grassano sanno89@gmail.com Maximiliano Marufo Da Silva Alejandro Gastón Alvarez Ignacio Bertacchini
IV Seminario de Inteligencia Artificial y Robótica Seguimiento i de objetos con Filtros de Partículas Franco Grassano sanno89@gmail.com Maximiliano Marufo Da Silva Alejandro Gastón Alvarez Ignacio Bertacchini
1. Muestreo de Sistemas Continuos. 1. Muestreo de Sistemas Continuos 1
 . Muestreo de Sistemas Continuos. Muestreo de Sistemas Continuos.. Secuencias 4.2. Sistema Discreto 5.3. Ecuaciones en Diferencias 6.4. Secuencia de Ponderación de un Sistema. 7.5. Estabilidad 9.6. Respuesta
. Muestreo de Sistemas Continuos. Muestreo de Sistemas Continuos.. Secuencias 4.2. Sistema Discreto 5.3. Ecuaciones en Diferencias 6.4. Secuencia de Ponderación de un Sistema. 7.5. Estabilidad 9.6. Respuesta
Control PID. Sintonización e implementación
 Control PID. Sintonización e implementación Elizabeth Villota Cerna Curso: Ingeniería de Control (MT221) Facultad de Ingeniería Mecánica UNI-FIM Julio 2012 1 Control PID Control PID una de las formas más
Control PID. Sintonización e implementación Elizabeth Villota Cerna Curso: Ingeniería de Control (MT221) Facultad de Ingeniería Mecánica UNI-FIM Julio 2012 1 Control PID Control PID una de las formas más
9. Manejo de restricciones. Panorama de la clase: Introducción Efecto wind-up Compensación anti-wind-up
 9. Manejo de restricciones Panorama de la clase: Introducción Efecto wind-up Compensación anti-wind-up CAUT1 Clase 16 1 Introducción Un problema inevitable en la mayoría de los problemas de control prácticos
9. Manejo de restricciones Panorama de la clase: Introducción Efecto wind-up Compensación anti-wind-up CAUT1 Clase 16 1 Introducción Un problema inevitable en la mayoría de los problemas de control prácticos
H. 1/5. Asignatura: TEORÍA DE CONTROL CLÁSICO. Objetivos: Contenidos Mínimos: Resol. N.º 123/12. Problemas Problemas Proyecto y Total
 H. 1/5 Carga Horaria: Objetivos: Contenidos Mínimos: Teoría Laboratorio Problemas Problemas Proyecto y Tipo/Rutinarios Abiertos Diseño Total 40 8 32 80 Brindar la formación básica necesaria para que el
H. 1/5 Carga Horaria: Objetivos: Contenidos Mínimos: Teoría Laboratorio Problemas Problemas Proyecto y Tipo/Rutinarios Abiertos Diseño Total 40 8 32 80 Brindar la formación básica necesaria para que el
REGULACIÓN AUTOMÁTICA
 SEGUNDO CURSO ANUAL INGENIERO TÉCNICO INDUSTRIAL ESPECIALIDAD EN ELECTRONICA INDUSTRIAL Plan de la Asignatura REGULACIÓN AUTOMÁTICA CURSO 2005-06 Departamento de Ingeniería de Sistemas y Automática Universidad
SEGUNDO CURSO ANUAL INGENIERO TÉCNICO INDUSTRIAL ESPECIALIDAD EN ELECTRONICA INDUSTRIAL Plan de la Asignatura REGULACIÓN AUTOMÁTICA CURSO 2005-06 Departamento de Ingeniería de Sistemas y Automática Universidad
[ANEXO 4] AJUSTE DE REGULADORES DE TURBINAS HIDRÁULICAS CON TÉCNICAS DE ESTIMACIÓN DE PARÁMETROS [13]
![[ANEXO 4] AJUSTE DE REGULADORES DE TURBINAS HIDRÁULICAS CON TÉCNICAS DE ESTIMACIÓN DE PARÁMETROS [13]](/thumbs/70/63677779.jpg "[ANEXO 4] AJUSTE DE REGULADORES DE TURBINAS HIDRÁULICAS CON TÉCNICAS DE ESTIMACIÓN DE PARÁMETROS [13]") [ANEXO 4] AJUSTE DE REGULADORES DE TURBINAS HIDRÁULICAS CON TÉCNICAS DE ESTIMACIÓN DE PARÁMETROS [13] Este método se aplica al ajuste de los reguladores de un regulador digital de turbinas hidráulicas.
[ANEXO 4] AJUSTE DE REGULADORES DE TURBINAS HIDRÁULICAS CON TÉCNICAS DE ESTIMACIÓN DE PARÁMETROS [13] Este método se aplica al ajuste de los reguladores de un regulador digital de turbinas hidráulicas.
Unidad I Análisis de Sistemas Realimentados
 Prof. Gerardo Torres - gerardotorres@ula.ve - Cubículo 003 Departamento de Circuitos y Medidas de la Escuela de Ingeniería Eléctrica de la Universidad de Los Andes Unidad I Análisis de Sistemas Realimentados
Prof. Gerardo Torres - gerardotorres@ula.ve - Cubículo 003 Departamento de Circuitos y Medidas de la Escuela de Ingeniería Eléctrica de la Universidad de Los Andes Unidad I Análisis de Sistemas Realimentados
4-1 INTRODUCCIÓN Señales de prueba típicas. 134
 4-1 INTRODUCCIÓN En el capítulo 3 se planteó que el primer paso para analizar un sistema de control era obtener un modelo matemático del mismo. Una vez obtenido tal modelo, existen varios métodos para
4-1 INTRODUCCIÓN En el capítulo 3 se planteó que el primer paso para analizar un sistema de control era obtener un modelo matemático del mismo. Una vez obtenido tal modelo, existen varios métodos para
Introducción. Por favor. No olvide bajar el tono a su. Franco E., Rosero E., Ramírez J.M. () SISTEMAS DE CONTROL II GICI / 42
 SISTEMAS DE CONTROL II GICI / 42") Introducción Por favor No olvide bajar el tono a su teléfono móvil!. Franco E., Rosero E., Ramírez J.M. () SISTEMAS DE CONTROL II GICI 2008 1 / 42 Introducción UNIDAD I ESTABILIDAD DE SISTEMAS DINÁMICOS
Introducción Por favor No olvide bajar el tono a su teléfono móvil!. Franco E., Rosero E., Ramírez J.M. () SISTEMAS DE CONTROL II GICI 2008 1 / 42 Introducción UNIDAD I ESTABILIDAD DE SISTEMAS DINÁMICOS
Tema 5 Acciones básicas de control. Controlador PID.
 Tema 5 Acciones básicas de control. Controlador PID. 1. Control en el dominio del tiempo. PID 2. Estudio del Lugar de las raíces 3. Control en el dominio de la frecuencia. Compensadores Control en el dominio
Tema 5 Acciones básicas de control. Controlador PID. 1. Control en el dominio del tiempo. PID 2. Estudio del Lugar de las raíces 3. Control en el dominio de la frecuencia. Compensadores Control en el dominio
TABLA DE CONTENIDO. TABLA DE CONTENIDO...ii ÍNDICE DE FIGURAS... iv ÍNDICE DE TABLAS... v CAPITULO INTRODUCCIÓN MOTIVACIÓN...
 TABLA DE CONTENIDO RESUMEN... i TABLA DE CONTENIDO...ii ÍNDICE DE FIGURAS... iv ÍNDICE DE TABLAS... v LISTA DE ACRÓNIMOS... 1 CAPITULO 1... 2 INTRODUCCIÓN... 2 1.1. MOTIVACIÓN... 2 1.2. ALCANCES... 3 1.3.
TABLA DE CONTENIDO RESUMEN... i TABLA DE CONTENIDO...ii ÍNDICE DE FIGURAS... iv ÍNDICE DE TABLAS... v LISTA DE ACRÓNIMOS... 1 CAPITULO 1... 2 INTRODUCCIÓN... 2 1.1. MOTIVACIÓN... 2 1.2. ALCANCES... 3 1.3.
Julián Andrés Herrera Valencia Felipe A. Marulanda Castro
 Julián Andrés Herrera Valencia Felipe A. Marulanda Castro Los motores de inducción son muy utilizados en los procesos industriales para suministrar potencia mecánica y, de esta manera, realizar tareas
Julián Andrés Herrera Valencia Felipe A. Marulanda Castro Los motores de inducción son muy utilizados en los procesos industriales para suministrar potencia mecánica y, de esta manera, realizar tareas
Práctica 4 Simulación del sistema de control de motor de CD
 Práctica 4 Simulación del sistema de control de motor de CD Objetivo: Se realiza la simulación detallada de cada bloque del sistema de control de un motor de CD en base al modelado matemático del motor
Práctica 4 Simulación del sistema de control de motor de CD Objetivo: Se realiza la simulación detallada de cada bloque del sistema de control de un motor de CD en base al modelado matemático del motor
PRIMERA PARTE. F roz 1 K Ms
 Universidad de Navarra Nafarroako Unibertsitatea Escuela Superior de Ingenieros Ingeniarien Goi Mailako Eskola ASIGNATURA GAIA Ingeniería de Control I 4º NOMBRE IZENA CURSO KURTSOA FECHA DATA 6 de septiembre
Universidad de Navarra Nafarroako Unibertsitatea Escuela Superior de Ingenieros Ingeniarien Goi Mailako Eskola ASIGNATURA GAIA Ingeniería de Control I 4º NOMBRE IZENA CURSO KURTSOA FECHA DATA 6 de septiembre
Capítulo 6: Sintonía experimental de controladores. 105 Capítulo 6: Sintonía experimental de controladores.
 Capítulo 6: Sintonía experimental de controladores. 105 Capítulo 6: Sintonía experimental de controladores. Capítulo 6: Sintonía experimental de controladores. 106 Capítulo 6: Sintonía experimental de
Capítulo 6: Sintonía experimental de controladores. 105 Capítulo 6: Sintonía experimental de controladores. Capítulo 6: Sintonía experimental de controladores. 106 Capítulo 6: Sintonía experimental de
COLECCIÓN DE PROBLEMAS DE EXÁMENES DE INGENIERÍA DE CONTROL
 COLECCIÓN DE PROBLEMAS DE EXÁMENES DE INGENIERÍA DE CONTROL A continuación se incluyen preguntas de examen de los últimos años, tanto de teoría como de problemas. Lo indicado entre paréntesis es la puntuación
COLECCIÓN DE PROBLEMAS DE EXÁMENES DE INGENIERÍA DE CONTROL A continuación se incluyen preguntas de examen de los últimos años, tanto de teoría como de problemas. Lo indicado entre paréntesis es la puntuación
LABORATORIO DE CONTROL
 ÉCNICAS DE SINONIZACIÓN DE ZIEGLERS - NICHOLS PRIMER MÉODO LABORAORIO DE CONROL Salvador Macías Hernández 717320 Fernando affoya Martinez 456357 Actividad previa A la segunda Práctica 12/6/2002 Si se puede
ÉCNICAS DE SINONIZACIÓN DE ZIEGLERS - NICHOLS PRIMER MÉODO LABORAORIO DE CONROL Salvador Macías Hernández 717320 Fernando affoya Martinez 456357 Actividad previa A la segunda Práctica 12/6/2002 Si se puede
ANALISIS DE SISTEMAS DINÁMICOS
 UACM SAN LORENZO TEZONCO 2014 ANALISIS DE SISTEMAS DINÁMICOS JOSE ALFREDO MARTINEZ PEREZ ANALISIS DE UN SISTEMA DINAMICO DE TERCER ORDEN 17-12-2014 ANALISIS DE UN SISTEMA DINAMICO DE TERCER ORDEN Introducción
UACM SAN LORENZO TEZONCO 2014 ANALISIS DE SISTEMAS DINÁMICOS JOSE ALFREDO MARTINEZ PEREZ ANALISIS DE UN SISTEMA DINAMICO DE TERCER ORDEN 17-12-2014 ANALISIS DE UN SISTEMA DINAMICO DE TERCER ORDEN Introducción
Planta - Figura 1 T T
 RESOLUCIÓN SEGUNDO PARCIAL Recursada 016 1) Explique cómo se halla el algoritmo de control discreto recursivo, u(k), para un controlador PID con la disposición de sus acciones como se indica en la Figura
RESOLUCIÓN SEGUNDO PARCIAL Recursada 016 1) Explique cómo se halla el algoritmo de control discreto recursivo, u(k), para un controlador PID con la disposición de sus acciones como se indica en la Figura
Controladores PID. Ricardo-Franco Mendoza-Garcia Escuela Universitaria de Ingeniería Mecánica Universidad de Tarapacá Arica, Chile
 Controladores PID Ricardo-Franco Mendoza-Garcia rmendozag@uta.cl Escuela Universitaria de Ingeniería Mecánica Universidad de Tarapacá Arica, Chile September 25, 2014 R. F. Mendoza-Garcia (Mecánica, UTA)
Controladores PID Ricardo-Franco Mendoza-Garcia rmendozag@uta.cl Escuela Universitaria de Ingeniería Mecánica Universidad de Tarapacá Arica, Chile September 25, 2014 R. F. Mendoza-Garcia (Mecánica, UTA)
Proyecto: Posicionamiento de una Antena Parabólica
 Capítulo 1 Proyecto: Posicionamiento de una Antena Parabólica 1.1 Descripción del sistema y especificaciones Se pretende controlar la posición angular (θ) de una antena parabólica de acuerdo a una referencia
Capítulo 1 Proyecto: Posicionamiento de una Antena Parabólica 1.1 Descripción del sistema y especificaciones Se pretende controlar la posición angular (θ) de una antena parabólica de acuerdo a una referencia
Ejercicios resueltos 2: Horno de Carbón Cátedra de Control y Servomecanismos
 Ejercicios resueltos : Horno de Carbón Cátedra de Control y Servomecanismos Idea y desarrollo: Ing. Cristian Zujew Corregido por el Dr. Ing. Cristian Kunusch Objetivo: en esta guía práctica se presenta
Ejercicios resueltos : Horno de Carbón Cátedra de Control y Servomecanismos Idea y desarrollo: Ing. Cristian Zujew Corregido por el Dr. Ing. Cristian Kunusch Objetivo: en esta guía práctica se presenta