T E S I S QUE PARA OBTENER EL TITULO DE: INGENIERO EN COMUNICACIONES Y E L E C T R Ó N I C A P R E S E N T A E L C. ULISES CASTRO GUTIÉRREZ
|
|
|
- Purificación Serrano Martínez
- hace 5 años
- Vistas:
Transcripción
1 INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA UNIDAD CULHUACAN DISEÑO DE UN ESTIMADOR DE ESTADOS ANALOGICO PARA UN LEVITADOR T E S I S QUE PARA OBTENER EL TITULO DE: INGENIERO EN COMUNICACIONES Y E L E C T R Ó N I C A P R E S E N T A E L C. ULISES CASTRO GUTIÉRREZ ASESORES: M. en C. Omar Jiménez Ramírez Dr. Basilio del Muro Cuellar México, D.F. Diciembre del 007
2 ÍNDICE GENERAL AGRADECIMIENTOS I OBJETIVO II JUSTIFICACIÓN III ORGANIZACIÓN DE LA TESIS IV ÍNDICE GENERAL V ÍNDICE DE FIGURAS VIII INTRODUCCIÓN XI CAPÍTULO I ESTADO DEL ARTE. Introducción. Funcionamiento del sistema de levitación electromagnético..3 Función de transferencia. 3.4 Reseña de variables de estado. 9.5 Diagrama de simulación. 0.6 Representación matricial..7 Control en variables de estado 4.7. Controlabilidad Observabilidad Realimentación de estados Estimador de estados. 7 V
3 CAPÍTULO II ANÁLISIS DEL SISTEMA EN ESPACIO DE ESTADOS Y DISEÑO DEL ESTIMADOR.. Introducción.. Modelado matemático del sistema en espacio de estados..3 Análisis de Controlabilidad. 4.4 Análisis de Observabilidad. 5.5 Diseño de una realimentación de estados. 6.6 Diseño de un Observador. 9 CAPÍTULO III SIMULACIONES DEL SISTEMA. 3. Introducción.3 3. Simulación del sistema con realimentación de estados Simulación del sistema con observador de estados Escalamiento del Sistema Adaptación del nuevo modelo Cálculo de una nueva realimentación de estados Cálculo de un nuevo estimador Simulaciones del sistema escalado. 48 VI
4 CAPÍTULO IV CONSTRUCCIÓN DEL ESTIMADOR Y SU APLICACIÓN AL SISTEMA REAL. 4. Introducción Amplificadores operacionales Construcción del estimador Construcción de la planta, con realimentación directa de estados Construcción del estimador, y su aplicación a planta previamente estabilizada Control por realimentación de estados estimados Aplicación del estimador al sistema real. 69 CONCLUSIONES Y PERSPECTIVAS 74 APÉNDICE A 76 APÉNDICE B 90 BIBLIOGRAÍA 96 VII
5 ÍNDICE DE FIGURAS CAPÍTULO I Figura.. Sistema de levitación electromagnética. Figura.. Diagrama a bloques del sistema de levitación magnética. Figura.3. Gráfica experimental del comportamiento de la inductancia de la 4 bobina en función de la separación con la esfera metálica. Figura.4. Gráfica experimental del comportamiento del sensor al variar la 5 posición de la esfera metálica. Figura.5. Lugar geométrico de las raíces del sistema de levitación. 8 Figura.6. Respuesta del sistema de levitación a lazo abierto con una estrada escalón. 9 Figura.7. Diagrama de bloques del sistema representado en espacio de estados. 3 Figura.8. Diagrama de bloques del sistema con la realimentación de estados. 7 Figura.9. Diagrama de bloques del sistema del observador de estados de orden completo. 9 CAPÍTULO II Figura.. Diagrama de Simulación del sistema de levitación magnética. Figura.. Diagrama de Simulación modificado. CAPÍTULO III Figura 3.. Diagrama de simulación del sistema con realimentación de estados. 33 Figura 3.. Respuesta del sistema con realimentación de estados. 34 Figura 3.3. Diagrama de simulación del sistema con observador de estados. 35 Figura 3.4. Respuesta del observador de estados. 36 Figura 3.5. Comparación del segundo estado. 37 Figura 3.6. Diagrama de simulación analógico para resolver la ecuación (3.), sin factores de escala. 39 Figura 3.7. Diagrama de simulación analógico para resolver la ecuación (3.), con factores de escala. 40 VIII
6 Figura 3.8. Diagrama de simulación analógico para el levitador, con factores de escala. 4 Figura 3.9. Diagrama de simulación para el nuevo modelo. 4 Figura 3.0. Diagrama de simulación del sistema con la realimentación de estados. 48 Figura 3.. Respuesta del sistema escalado, con realimentación directa de estados. 49 Figura 3.. Diagrama de simulación del sistema escalado y en bloques, con observador de estados. 50 Figura 3.3. Respuesta del observador, comparando la salida real con la estimada. 5 Figura 3.4. Comparación del segundo estado. 5 Figura 3.5. Comparación del primer estado. 53 Figura 3.. Diferencia entre la salida real y la estimada. 54 CAPÍTULO IV Figura 4.. Configuración básica del amplificador inversor. 56 Figura 4.. Configuración básica del amplificador no inversor. 57 Figura 4.3. Sumador inversor. 57 Figura 4.4. Circuito Restador. 58 Figura 4.5. Integrador simple. 59 Figura 4.6. Diagrama eléctrico de la planta con realimentación de estados. 6 Figura 4.7. Señal de referencia aplicada al sistema. 6 Figura 4.8. Respuesta del sistema con realimentación directa de estados. 63 Figura 4.9. Diagrama eléctrico del estimador de estados. 65 Figura 4.0. Diagrama a bloques del observador, con realimentación de estados estimados. 66 Figura 4.. Señal de entrada y salida, del sistema. 67 Figura 4.. Señal de salida real y estimada. 67 Figura 4.3. Estado uno, real y estimado. 68 Figura 4.4. Estado dos, real y estimado. 68 Figura 4.5. Diagrama a bloques de la implementación del estimador al sistema real. 69 Figura 4.6. Diagrama eléctrico del PID. 70 IX
7 Figura 4.7. Respuesta del sistema con el PID. 7 Figura 4.8. Salida estimada por el observador. 7 Figura 4.9. Salida estimada por el observador. 7 Figura 4.0. Segundo estado estimado. 7 Figura 4.. Segundo estado estimado, ampliado. 7 Figura 4.3. Error de estimación de la salida. 73 X
8 INTRODUCCIÓN Llamamos levitación magnética (MagLev) al fenómeno en el cual un material con ciertas características puede suspenderse en el aire, gracias a la repulsión o atracción producida por la interacción de dos campos magnéticos. La levitación por repulsión se presenta cuando los campos que interactúan se polarizan con la misma carga magnética (por ejemplo el acercar un material diamagnético hacía un campo magnético), mientras que la levitación por atracción ocurre cuando los campos se polarizan con diferente carga magnética (por ejemplo el acercar un material ferromagnético en la presencia de un campo magnético). La levitación magnética es el fenómeno que hoy en día se aplica en la construcción de vehículos como los trenes de levitación. Si bien existen otras aplicaciones como las montañas rusas de levitación magnética o lo que en la actualidad se encuentra bajo investigación; que es la propulsión de naves espaciales mediante este mismo fenómeno, estas se basan en los mismos principios que los trenes, tanto para mantenerse levitando como para impulsarse a lo largo de un carril o guía. Un tren de levitación magnética es un vehículo que utiliza las ondas magnéticas para suspenderse por encima de un carril (algunos de estos trenes van a cm por encima de la vía y otros pueden levitar hasta 5 cm) e impulsarse a lo largo de un carril o guía. Existen tres tipos de sistemas para lograr la levitación magnética de un tren, los cuales son: Sistema de Suspensión Electromagnética (EMS). En este sistema la parte inferior del tren queda por debajo de una guía de material ferromagnético, que no posee magnetismo permanente. Cuando se ponen en marcha los electroimanes situados sobre el vehículo, se genera una fuerza de atracción y debido a que el carril no puede moverse, son los electroimanes los que se mueven en dirección a éste, elevando con ellos el tren completo. Sistema de Suspensión Electrodinámica (EDS). La levitación EDS se basa en la propiedad de ciertos materiales (específicamente los materiales diamagnéticos) para rechazar cualquier campo magnético que intente penetrar en ellos. La suspensión, por tanto, consiste en que el superconductor rechazará las líneas de campo magnético de manera que no pasen por su interior, lo que provocará la elevación del tren. En diversos prototipos de suspensión EDS se coloca un material superconductor a los lados de la parte inferior del vehículo. Este pasa a unos centímetros de un conjunto de bobinas situadas sobre el carril guía. Al moverse el vehículo a lo largo del carril, se inducirá una corriente en las bobinas, las cuales actuarán entonces como electroimanes. Al interactuar con los superconductores montados en el tren, se producirá la levitación. XI
9 Sistema de Suspensión Inductrack. Los sistemas Inductrack son esencialmente sistemas EDS que; en vez de materiales superconductores, utilizan imanes permanentes con una distribución especial a lo largo del riel conocida como arreglo Halbach (Halbach array), para crear una fuerza de levitación lo suficientemente poderosa para hacer funcionar un MagLev. En este tipo de arreglo, las barras magnéticas con grandes campos son dispuestas de manera que el campo magnético de cada barra esté orientado en un ángulo correcto con la barra adyacente. La combinación de las líneas de campo magnético de este arreglo, produce un poderoso campo debajo de este y prácticamente ningún campo arriba. Los imanes sobre las bobinas producen la levitación del vehículo, mientras que los imanes a los lados de las bobinas se encargarán del guiado lateral. La levitación magnética tiene también aplicaciones en otras áreas tecnológicas, como en el almacenamiento de energía, ya que permite hacer girar indefinidamente una rueda superconductora inmersa en un campo magnético de manera que almacene la energía mecánica (invento denominado Flywheel o rueda volante). Con estos dispositivos se consigue generar y almacenar energía en centrales eléctricas para el consumo en horas de alta demanda. Esta aplicación se basa principalmente en la interacción de un superconductor con un campo magnético. De esta manera, la comprensión detallada de la interacción entre campos magnéticos se convierte en el factor clave necesario para diseñar, llevar a término y optimizar los dispositivos existentes. Los resultados de la implementación del estimador en una planta simulada llevando acabo la acción de control con una realimentación de estados estimados, fueron objeto para la publicación de un articulo con nombre Diseño de un Controlador en Variables de Estado para un Levitador en la IEEE ROC&C 007. XII
10 AGRADECIMIENTOS A Dios por darme la vida, la salvación y la bendición de concluir mis estudios de ingeniería. A mis padres: Adán Castro y María Elena Gutiérrez Bardales, por ser mis padres, darme su amor y apoyo. A mis hermanos: Verónica, Fidel, Carolina y Marisol, por darme su cariño y apoyo. A mis maestros por ser el instrumento de enseñanza, en especial a la maestra Ernestina y al maestro Omar. A los Héroes de la Independencia, por luchar y ofrendar su vida por un México libre. A Don Benito Juárez García por ser un gran hombre preocupado por la educación técnica de México. A los Héroes de la Revolución por luchar y ofrendar su vida por un México mejor. Al General Don Lázaro Cárdenas del Río por ser el fundador del IPN. A Don Juan de Dios Bátiz por coadyuvar a la fundación del IPN. A Don Wilfrido Massieu por ser un gran hombre. A todos los Héroes Anónimos I
11 OBJETIVO En el presente trabajo se diseñará y construirá un estimador de estados analógico para un sistema de levitación electromagnética, con el propósito de generar la estimación de los dos estados y la salida del sistema. El analisis y diseño se realizará con la teoría de control moderna, en espacio de estados. Se llevará acabo la construcción del diagrama de simulación del sistema (planta simulada) con amplificadores operacionales con una realimentación de estados, el estimador será construido de igual forma. El estimador será implementado en la planta simulada siendo esta controlada con una realimentación de estados estimados. Finalmente, el estimador será implementado en el sistema de levitación, siendo controlado por un PID, esto con el objeto de verificar que se realice la estimación de los variables del sistema real. II
12 JUSTIFICACIÓN El levitador del presente trabajo es un sistema inestable de segundo orden. Una metodología para estabilizarlo es con una realimentación de estados; sin embargo, uno de sus dos estados no esta disponible para su realimentación. Es por ello que se le diseña un estimador de estados analógico, para generar la los estados de la planta, y puedan ser tomados para llevar acabo una realimentación de estados. Además, que al generar la estimación se obtiene una señal importante que no podría ser medida en el sistema de levitación, que es la velocidad de la esfera, y no se tiene el instrumento para medir dicha señal. III
13 ORGANIZACIÓN DE LA TESIS Capítulo I: Se describe el sistema de levitación electromagnética al cual se le diseñará el estimador de estados analógico. Se muestra la metodología para obtener su función de transferencia. Se hace una reseña del espacio de estados, describiendo la metodología para hacer el cálculo de una realimentación de estados, así también como para el estimador de estados. Capítulo II: Se hace el análisis del sistema en espacio de estados, el cual consiste en obtener su modelo matricial con base en la función de transferencia, para posteriormente hacer el analisis de controlabilidad y observabilidad, con el modelo matricial. También se hace el diseño de una realimentación de estados, así como de un estimador. Capítulo III: Se hace la simulación del sistema con la realimentación de estados y el estimador del capitulo anterior. Pero debido a que este modelo no es posible construirlo con amplificadores operacionales, debido a la magnitud de las ganancias, se hace un escalamiento al sistema, con el cual obtenemos un nuevo modelo. Para este nuevo modelo se hace el cálculo de una realimentación de estados y de un estimador; y son simulados los nuevos resultados. Capítulo IV: Se muestran cada uno de los componentes electrónicos, que formaran parte de la construcción del estimador, los cálculos de las resistencias para cada una de las configuraciones de los amplificadores operacionales. Se construye el diagrama de simulación del sistema, el estimador y la realimentación de estados con operacionales, obteniendo como resultado la simulación del control en espacio de estados. Finalmente se aplica el estimador al sistema real siendo controlado por un PID. IV
14 -Capítulo I- -Estado del Arte- CAPÍTULO I ESTADO DEL ARTE. Introducción En este capitulo se describe el sistema de levitación electromagnética, mencionando los bloques que lo conforman. Se muestran las graficas del comportamiento del sistema de inductancia y medición, posteriormente se obtiene la función de transferencia, y con ella se hace el análisis del sistema en el lugar geométrico de las raíces del sistema. Se hace una reseña de variables de estado, mencionando las condiciones de controlabilidad, observabilidad, y se muestra la metodología para diseñar una realimentación de estados y un estimador.. Funcionamiento del sistema de levitación electromagnético El sistema de levitación electromagnética, figura (.), al cual se le diseñará su estimador de estados analógico, fue construido y modelado previamente, [5]. El cual se conforma de cuatro sistemas con tareas específicas cuyo fin es mantener un objeto levitante en suspensión. Dichos sistemas se relacionan entre ellos como se muestra en la figura (.), los cuales se describen brevemente a continuación.

15 -Capítulo I- -Estado del Arte- Figura.. Sistema de levitación magnética. r( t ) Sistema de Control Sistema de Potencia Sistema de Inducción y( t) Sistema de Medición Figura.. Diagrama a bloques del sistema de levitación magnética.. Sistema de inducción magnética. Esta formado por un electroimán, cuya labor es la de suministrar un campo magnético lo suficientemente intenso para poder vencer la fuerza de gravedad que se ejerce en el objeto levitante y de esta forma mantener un equilibrio de fuerzas, produciendo el fenómeno de la levitación.. Sistema de medición. Es la parte encargada de medir la posición del objeto levitante en su desplazamiento sobre el eje vertical, proporcionando una señal de voltaje que sirve como realimentación en la estructura de control propuesta. 3. Sistema de potencia. Es la etapa encargada de regular y adecuar la señal proveniente del sistema de control a una señal de corriente con características específicas, la cual circula en el devanado del electroimán y que produce el campo magnético.
16 -Capítulo I- -Estado del Arte- 4. Sistema de control. Es el cerebro del sistema, su función es la de generar una señal adecuada (llamada acción de control) que pueda ser interpretada por el sistema de potencia con base en una entrada de referencia y la señal proveniente del sistema de medición. En este caso consiste en un observador de estados y de su realimentación con una ganancia, para la simulación con operacionales; y un PID para la implementación con el sistema real. Las características de la señal de referencia se determinan en base a las mediciones de la posición de la esfera y el valor del voltaje que entrega el fototransistor en función de la luz infrarroja emitida por el LED. Los valores de voltaje de las fuentes que alimentan cada una de las partes que conforman el sistema de levitación son de 0V/5A de CC para el sistema de potencia y el sistema de inducción magnética, con el que se cubre la demanda de corriente de la bobina, proporcionando una tolerancia del 40% como protección a los picos que se puedan presentar al probar el sistema completo. Por otra parte, se utiliza un voltaje de ±5V de CC para alimentar los amplificadores operacionales del sistema de control y 5V de CC para los elementos infrarrojos del sistema de medición..3 Función de transferencia Para un sistema lineal e invariante en el tiempo se define como el cociente de la transformada de Laplace de la salida y de la entrada, bajo la suposición de que todas las condiciones iniciales son cero. La relacion de la función de transferencia es únicamente entrada-salida, y esta limitada a los sistemas lineales e invariantes en el tiempo. Algunas de las características que tiene la función de transferencia son: Es una propiedad de un sistema. Incluye las unidades necesarias para relacionar la entrada con la salida. No proporciona información acerca de la estructura física del sistema. Se puede comprender la naturaleza del sistema, estudiando la salida en respuesta a varias formas de entradas. Se puede obtener experimentalmente introduciendo entradas conocidas y estudiando la salida del sistema. En general estos son los pasos a seguir para obtener el modelo matemático en control clásico, (función de transferencia) de un sistema:. Escribir la ecuación diferencial para el sistema.. Realizar la linealizacion alrededor de un punto, si es que el sistema es no lineal. 3. Aplicarle la transformada de Laplace a la ecuación diferencial. 3
17 -Capítulo I- -Estado del Arte- 4. Hacer el cociente entre la salida y la entrada. 5. Tomar en cuanta la ganancia del amplificador de la realimentación, si es que tiene. Ahora bien con estas bases mencionaremos como es que se obtuvo la función de transferencia de nuestro sistema de levitación electromagnética.. Se midió la inductancia de la bobina, en función de la distancia de separación x entre la esfera y la bobina.. Gráficamente se buscó establecer un intervalo de confianza y y y y + y, Donde y, es el valor más representativo de nuestra medición. Donde y, es el error absoluto debido a la calibración. Para el medidor de impedancias L = 0 4 H. Para el vernier x = 0 4 m. Figura.3. Gráfica experimental del comportamiento de la inductancia de la bobina en función de la separación con la esfera metálica. 3. Con esto se obtuvo la formula que representa el comportamiento de la inductancia en relacion a la distancia, quedando expresado en la siguiente formula. 0 x Lx ( ) L Le a = + (.) 4
18 -Capítulo I- -Estado del Arte- Donde el valor a es una distancia conocida como constante de longitud, la cual es análoga al concepto clásico de constante de tiempo en un sistema eléctrico RC. El resultado de las mediciones y de acuerdo a lo mostrado en la figura (.3), obtenemos que para nuestro sistema en particular a = 4 mm, L = 7.6 mh y L 0 =.7 mh. 4. A continuación se midió el voltaje en el emisor del fototransistor, con relación a la posición de la esfera. La señal proveniente del amplificador se ajusto para que variara de 0-5V. La siguiente gráfica muestra el comportamiento de dicha relacion. Figura.4. Gráfica experimental del comportamiento del sensor al variar la posición de la esfera metálica. 5. En la figura (.4) se ve que la respuesta del sensor es no lineal. Por lo que se eligió como región de operación la llamada pendiente G S. Quedando expresado matemáticamente de la siguiente forma. G S V'.305V.V V = = =.05 = 05 V m x' 4mm 3mm mm (.) 6. Ahora se muestra el modelo matemático que rige el comportamiento de la esfera en levitación, el cual se muestra en la siguiente ecuación diferencial. 5
19 -Capítulo I- -Estado del Arte- d x m m = mg F (.3) dt 7. Es necesario de igual forma mostrar todas las formulas de las energía y fuerzas que actúan. Como es la co-energía magnética, [6], que actúa en el objeto levitante, mostrada en la ecuación (.4). La fuerza de origen magnético que actúa sobre la esfera, se produce por los cambios que sufre la co-energía magnética al variar la distancia x, esto se muestra en la ecuación (.5). W( i, x) = L( x) i (.4) f (, ) W i x L0 = = ie x a x a (.5) 8. De la ecuación (.5), cuando se llega al equilibrio estático las fuerzas se neutralizan entre ellas, produciendo el estado de levitación en un punto de equilibrio donde la distancia de separación x = d y la corriente i = I, quedando expresado de la siguiente manera: L N L = = (.6) a a d 0 a d mg e I I 9. Reordenando la ecuación (.6), quedará en función de la corriente. amg amg I = d N L = (.7) d a L e 0 0. De la ecuación (.5), se ve que la fuerza f es de origen no lineal, para lo cual se tiene que lineal izar utilizando los dos primeros términos de la expansión en series de Taylor, los cuales al adecuarse a nuestro caso son: f f f (, ix) = f( Id, ) + x+ i x i Id, Id, (.8) 6
20 -Capítulo I- -Estado del Arte-. Sustituyendo la ecuación (.5) en (.8), se obtiene lo siguiente: d d a a f = L 0e I x L0e I i (.9) a a. En equilibrio se da que mg = f (I, d), respaldando la ecuación (.6), por lo tanto la ecuación diferencial que describe la posición de la esfera en cualquier instante de tiempo, queda expresada como: dx NLI d NLI d m x+ i= 0 (.0) dt a a 3. Aplicamos transformada de Laplace con condiciones iniciales igual a cero a la ecuación (.0), para conocer la dinámica del sistema de acuerdo a la ubicación de sus polos, se obtiene la función de transferencia dada por: NLI d X '( s) = a Is () NLI ms a d (.) 4. Usando la ecuación (.7) y (.), sustituyendo los valores de las constantes I, g y a, se obtuvo la función de transferencia. X '( s) = Is ( ) s 45.5 (.) 5. Finalmente se incluye en la función de transferencia, la ganancia del sensor X O ( s) = GS X '( s), de tal forma que la función de transferencia quede así: X ( s) = Is O ( ) s 45.5 (.3) 7
21 -Capítulo I- -Estado del Arte- Ahora para tener una idea clara del comportamiento del sistema se realizaron algunas simulaciones. En la figura (.5) se muestra el lugar geométrico de las raíces del sistema con base en la ecuación (.3), la información que nos proporciona la grafica, es que el sistema es inestable, debido a que uno de sus los polos se encuentra en el lado derecho del eje real. En la figura (.6) se presenta la respuesta de la simulación del sistema a lazo abierto, donde se aprecia que el sistema se satura rápidamente, lo que nos indica que el balín se pegará con la bobina tan pronto como se le conecte la señal de referencia. Este comportamiento no es práctico ya que difícilmente la posición de la esfera describirá el fenómeno de la levitación, por lo que se debe diseñar un sistema de control que nos permita lograr el dicho fenómeno. Figura.5 Lugar geométrico de las raíces del sistema de levitación. 8
22 -Capítulo I- -Estado del Arte- Figura.6 Respuesta del sistema de levitación a lazo abierto con una estrada escalón..4 Reseña de variables de estado Un sistema moderno complejo posee muchas entradas y salidas que se relacionan entre sí de una forma complicada. Para analizar un sistema de este tipo, es esencial reducir la complejidad de las expresiones matemáticas, además de recurrir a computadores que realicen una gran parte de los cálculos necesarios. El enfoque en el espacio de estados para el análisis de sistemas con dicha característica, es el más conveniente. Mientras la teoría de control clásica se basa en la relación entrada-salida, o función de transferencia, la teoría de control moderno se basa en la descripción de las ecuaciones de un sistema de orden n, en términos de n ecuaciones diferenciales de primer orden, que se combinan en una ecuación diferencial vectorial de primer orden. El uso de la notación matricial simplifica enormemente la representación matemática de los sistemas complejos. El incremento en el número de variables de estado, de entradas o de salidas no aumenta la complejidad de las ecuaciones. Un problema importante en el diseño de sistemas de control es la simplificación de transmitancias específicas mediante la interconexión de componentes simples. La simplificación también es importante en los sistemas de simulación, donde se predice el comportamiento del sistema con base en un modelo que se rige por ecuaciones equivalentes. Sobre todo, el punto de vista de la síntesis conduce a técnicas fundamentales para la descripción, análisis y diseño del sistema. Estos métodos son sistemáticos, compactos y adecuados al análisis por computadora. Se pueden también hacer extensivos a sistemas no lineales y variables en el tiempo. 9
23 -Capítulo I- -Estado del Arte- Para comprender lo que es el diseño en variables de estado, debemos tener claro los siguientes conceptos: Estado: El estado de un sistema dinámico es el conjunto de variables más pequeñas (llamadas variables de estado), de tal forma que el conocimiento de estas variables junto con el de la entrada, determinan por completo el comportamiento del sistema en cualquier instante de tiempo. Variables de estado: En un sistema dinámico son las variables que constituyen el estado del sistema. Siendo estas la parte más fundamental del estado, con las variables de estado se modela cualquier sistema mecánico, eléctrico, hidráulico, etc. Como ejemplo de variable de estado mencionaremos al voltaje, la corriente, la posición, la velocidad. Como se puede ver cada una de estas variables constituye un estado, que a su vez el conjunto de estados será el modelo de un sistema determinado. Espacio de estados: El espacio n-dimensional cuyos ejes de coordenadas están formados por el eje x ( t ), eje x ( t),, eje x (t) n, donde x ( t), x ( t),..., xn ( t) son las variables de estado, se denomina espacio de estados..5 Diagrama de simulación. Para poder trabajar con mayor facilidad se utilizan los diagramas de simulación, algunos de los bloques que se utilizan frecuentemente son los sumadores, ganancias y el integrador, un bloque o rama que tiene una transmitancia de s. Un diagrama de bloques o grafica del flujo de señal compuesto únicamente por integradores y transmitacias constantes se denomina diagrama de simulación. El orden de tal sistema es simplemente el número de integradores que intervienen. Las graficas del flujo de señal son especialmente convenientes para representar los diagramas de simulación, en muchos casos son evidentes a simple vista de la funcione de transferencia del sistema, utilizando la regla de la ganancia de Masson, ecuación (.4). P= Pk k (.4) k Donde P k = ganancia del camino o transmitancia del k-ésimo camino directo = L a + Lb Lc Ld Le L f + a b, c d, e, f 0
24 -Capítulo I- -Estado del Arte- a b, c d, e, f L a L L b L c d L d L f = suma de todas las ganancias de lazos individuales = suma de los productos de ganancias de todas las posibles combinaciones de dos lazos que no se tocan = suma de los productos de ganancias de todas las posibles combinaciones de tres lazos que no se tocan. k = cofactor del determinante del k-ésimo camino directo del diagrama eliminando los lazos que se tocan en el k-ésimo camino directo. Una función de transferencia es la relación de dos polinomios en s, siendo esta racional. Si el grado del numerador es menor o igual que el del denominador se dice que la función de transferencia es propia. Cualquier función de transferencia racional propia se puede sintetizar con un diagrama de simulación, es decir utilizando solamente integración, multiplicación por una constante y operaciones de suma. Un arreglo de síntesis muy útil, conocido como la forma de variable de fase, se describe a continuación. Para una función de transferencia al dividir el numerador y denominador entre el término de la potencia más alta de s que hay en el denominador produce un en el denominador, y resultan otros términos en el numerador y denominador que son potencias inversas de s que representan integraciones múltiples. En esta forma, la función de transferencia se puede interpretar como una expresión de la regla de la ganancia de Masson. La forma variable de fase es particularmente conveniente para la síntesis de salida simple y múltiple, mientras que la forma de variable de fase dual, permite el arreglo fácil de los sistemas de entrada simple y múltiple. Existe un amplio número de formas de conectar integradores para lograr sistemas que tengan funciones de transferencia, incluyendo sistemas con entradas y salidas múltiples. Por otra parte, la representación de sistemas en términos de integradores es útil no sólo para la síntesis de las funciones de transferencia, sino también para la descripción de sistemas de todo tipo, especialmente aquellos que son muy complicados, para los cuales resulta útil una notación estándar y compacta.
25 -Capítulo I- -Estado del Arte-.6 Representación matricial. Una descripción general de variable de estado de un sistema de n-ésimo orden comprende n integradores, cuyas salidas son las variables de estado. La entrada de cada integrador se excita con una combinación lineal de variables de estado y con las entradas. En el dominio del tiempo existe un sistema de n ecuaciones diferenciales de primer orden en las n variables de estado y las entradas. dx dt dx dt dx dt n = a x + a x a x b u b u ( t) n n i i = a x + a x a x b u b u ( t) n n i i = a x + a x a x b u b u ( t) n n nn n n ni i (.5) De igual forma hay un número n de salidas, como se muestra en la siguiente ecuación: y y m = c = c x x m + c + c x m x + + c n + + c x n mn x n (.6) Estas ecuaciones de estado se pueden escribir en forma compacta utilizando la notación matricial, de la siguiente forma: d dt x x a a a x () t b b u () t n i x x a a a n x() t b b i u() t = = + x x a a a x () t b b u () t n n n n nn n n ni n (.7)
26 -Capítulo I- -Estado del Arte- De forma simplificada la representación de un sistema en variables de estado, queda de la siguiente forma. x = Ax( t) + Bu( t) (.8) y = Cx( t) + Du( t) (.9) Donde x (t) = vector de estados (vector de dimensión n) u (t) = señal de control (escalar) A = matriz de estado de n n B = matriz de entrada de n C = matriz de salida de m n D = matriz de transmisión directa Figura.7. Diagrama de bloques del sistema representado en espacio de estados En la figura (.7) se muestra el diagrama a bloques en variables de estado para cualquier sistema, en donde se ven la interacción de las matrices. Ya contando con el conocimiento antes mencionado, podemos pasar al análisis del sistema, para saber si se le podrá diseñar una ley de control. Dicho análisis consiste en determinar si el sistema es controlable y observable. Cumpliendo esta dos condiciones se puede proceder al diseño. 3
27 -Capítulo I- -Estado del Arte-.7 Control en variables de estado En variables de estado hay dos conceptos muy importantes, que se tienen que analizar, para poder llevar acabo el diseño de un controlador, los cuales son controlabilidad y observabilidad, ya que son estos los que determinan la existencia de una solución completa para un problema de diseño de un sistema de control. La solución a un problema puede no existir si el sistema considerado no es controlable. Aunque la mayor parte de los sistemas físicos son controlables y observables, los modelos matemáticos correspondientes tal vez no posean dichas propiedades.7. Controlabilidad Sea el sistema en tiempo continuo, definido por la ecuación (.8). Se dice que el sistema descrito mediante dicha ecuación es de estado controlable en t = t0, si es posible construir una señal de control sin restricciones que transfiera un estado inicial a cualquier estado final en un intervalo de tiempo finito. Si todos los estados son controlables, se dice que el sistema es de estado controlable. En este caso las matrices involucradas en el análisis de la controlabilidad son la matriz A y la matriz B. La matriz de controlabilidad se define: M c n [ B AB A B] = (.0) n El sistema es de estado completamente controlable, si B, AB,, A B son linealmente independientes. Esto también se demuestra si el determinante de la matriz de controlabilidad es diferente de cero (solo para sistemas con una entrada), si es así el sistema es controlable..7. Observabilidad Se dice que un sistema es observable si el estado x ( t 0 ) se determinar a partir de la observación de la salida durante un intervalo de tiempo finito. El concepto de observabilidad es útil al resolver el problema de reconstruir variables de estado no medibles a partir de variables que sí lo son, ya que en la práctica alguna de las variables de estado no son accesibles para una medición directa, por lo que es necesario estimarlas para construir la señal de control. En el caso de la observabilidad, de las ecuaciones (.8) y (.9) las matrices que intervienen son la matriz de estados A y la matriz de salida C. Mediante estas dos matrices obtendremos la matriz de observabilidad. 4
28 -Capítulo I- -Estado del Arte- La construcción de la matriz de observabilidad, que da de la siguiente forma: M o C CA = CA n (.) El sistema es observable si los vectores de la matriz observabilidad son linealmente independientes. De igual forma, si el determinante de la matriz de observabilidad es diferente de cero (solo para sistemas con una salida), es de rango completo y por lo tanto es observable..7.3 Realimentación de estados La realimentación de estados se realiza por medio de una asignación de polos, con lo cual los polos del sistema en lazo cerrado se pueden reubicar en cualquier posición del plano s, si y solo si el sistema es controlable. La matriz de ganancias de realimentación de estado es calculada con base en la reubicación. Seleccionando una matriz de ganancias apropiada para la realimentación del estado, es posible hacer que el sistema tenga los polos en lazo cerrado en las posiciones deseadas, siempre y cuando el sistema original sea de estado completamente controlable. Sea el sistema de control definido por las ecuaciones (.8) y (.9). Para lo cual se selecciona la señal de control como u = Kx(t) (.) Esto significa que la señal de control se determina mediante un estado instantáneo. Al sustituir la ecuación (.) en la ecuación (.8) se obtiene: ( A BK ) x(t) La solución de la ecuación (.3) esta dada por: x = (.3) ( A BK ) t x( t) = e x(0) (.4) 5
29 -Capítulo I- -Estado del Arte- Hay varios métodos para la determinación de la matriz K, en este caso mencionaremos el método en el cual se utiliza la matriz de transformación P, para ilustrarlo, aunque el sistema de levitación es muy sencillo y no requiere de este procedimiento. Este método lo desarrollaremos en los siguientes pasos: Paso. Paso. Comprobar la condición de controlabilidad para el sistema. Si el sistema es de estado completamente controlable, siga los siguientes pasos. Pasar la representación del sistema, a la forma canónica controlable. Obtener la matriz de controlabilidad C o. Obtener la matriz M, que se obtiene a partir del polinomio característico. a M = (.5) 0 Obtener la matriz de transformación P, con la siguiente formula : P = C M (.6) o Finalmente realizar la transformación del sistema a su forma canónica controlable, es con las siguientes formulas: A B = P AP (.7) = P B (.8) Paso 3. Reubicar los polos utilizando la siguiente expresión matemática. si A + BF = 0 (.9) Obtener el determinante como se muestra en la ecuación (.9). El resultado se iguala con la reubicación de los polos que se desea. Hacer una correspondencia para encontrar el valor de F. 6
30 -Capítulo I- -Estado del Arte- Paso 4. Determina de la matriz de ganancias de realimentación, haciendo la transformación F = FP (.30) Ya con los valores de la matriz de realimentación de estados, se puede simular para verificar el desempeño del sistema, la figura (.8) muestra en diagrama a bloques la realimentación de los estados, para llevar acabo la acción de control. Figura.8. Diagrama de bloques del sistema con la realimentación de estados.7.4 Estimador de estados En la asignación de polos se supuso que todas las variables de estado estaban disponibles para su realimentación. Sin embargo, en la práctica esto no es posible. Es por eso que se necesita estimar las variables de estado que no están disponibles. La estimación de las variables se denomina normalmente observación, y al dispositivo que realiza tal operación se le conoce como observador. Si el observador de estado capta todas las variables de estado del sistema, sin importar si algunas están disponibles por medicion directa, se denomina observador de orden completo. También existe el observador de orden reducido, el cual únicamente estima las variables de estado que no están disponibles para su medición. Un observador de estado estima las variables basándose en las mediciones de las señales de salida y de control, con las cuales alimentan un subsistema con base en el sistema original. Usualmente los observadores analógicos se construyen físicamente con amplificadores operacionales, utilizando cada una de sus configuraciones. Los observadores de estado pueden diseñarse si y solo si se satisface la condición de observabilidad. La notación que se utiliza para designar el vector de estado observado es xˆ () t. En muchos casos prácticos, el vector de estado observado se usa en la realimentación del estado para generar el vector de control deseado 7
31 -Capítulo I- -Estado del Arte- Sea el sistema definido por las ecuaciones (.8) y (.9), del cual omitiremos únicamente el uso de la matriz D, debido a que para nuestro caso es cero. El observador es un subsistema utilizado para construir el vector de estado de la planta. El modelo matemático del observador es básicamente el mismo que el de la planta, salvo que se incluye un término adicional que contiene el error para compensar las imprecisiones en las matrices A y B así como del error inicial. El error inicial es la diferencia entre el estado inicial y el estado estimado inicial. De esta forma, se define el modelo matemático del observador como: x ˆ = Axˆ+ Bu + K ( ˆ ) e y Cx (.3) Factorizando las variables y para mayor comodidad la ecuación (.3), queda de la siguiente manera: Donde xˆ es el estado estimado Cˆ x es la salida estimada xˆ = ( A K C) xˆ+ Bu+ K y (.3) e e Como se puede ver en la ecuación (.3), las entradas del observador son la salida y y la entrada de control u. En la figura (.9) se ve la matriz K e, matriz de ganancia del observador, es una matriz de ponderación al término de corrección que involucra la diferencia entre la salida real medida y la salida estimada Cˆ x, para con esta diferencia hacer una inyección a cada uno de los estados del observador. Este término corrige de forma continua la salida del modelo y mejora el comportamiento del observador. También se ve que por el lado izquierdo que el observador es alimentado por la señal de control del sistema. También como son tomados los estados estimados para su realimentación, y llevar acabo la acción de control en el sistema. 8
32 -Capítulo I- -Estado del Arte- Figura.9. Diagrama de bloques del sistema del observador de estados de orden completo Se puede obtener la ecuación de error del observador, haciendo la resta de las ecuaciones (.8) y (.3), quedando de la siguiente forma. x xˆ = Ax Axˆ K ( ˆ ) e Cx Cx (.33) Reagrupando los términos la ecuación (.33) queda de la siguiente forma: x x ˆ = ( A K C)( x xˆ) (.34) La diferencia entre x y xˆ se define como el vector de error e. Luego entonces la ecuación (.34) se convierte en: e e = ( A K C) e (.35) e Con base en la ecuación (.35) se ve que el comportamiento dinámico del vector de error está determinado por los valores propios de la matriz ( A K ec). Si la matriz es estable, el vector de error convergerá a cero para cualquier vector de error inicial e (0). 9
33 -Capítulo I- -Estado del Arte- Es decir, x ˆ( t) convergerá a x (t) sin tomar en cuenta los valores de x (0) y ˆx (0). Si se eligen los valores propios de la matriz ( A K ec) de tal forma que el comportamiento dinámico del vector de error sea asíntónicamente estable y suficientemente rápido, entonces cualquier vector de error tenderá a 0 con una velocidad adecuada. Si el sistema es completamente observable, es posible seleccionar una matriz K e tal que ( A K ec) tenga los valores propios arbitrariamente deseados. Es decir, se puede determinar la matriz de ganancias del observador K e, para que con esta se obtenga la matriz deseada ( A K C). e El método al que nos referiremos para calcular la matriz del estimador K e, será el de la sustitución directa, de igual forma para ilustrar cual es el método más sencillo en sistemas de bajo orden. Este método lo desarrollaremos en los siguientes pasos: Paso. Paso. Compruebe la condición de observabilidad para el sistema. Si el sistema es controlable. Reubicación de los polos se hace con la siguiente expresión matemática: si A + KeC = 0 (.36) Paso 3. Determinar de la matriz de ganancias de realimentación, igualando el determinante de la ecuación (.36) con el polinomio característico deseado: ( µ )( µ )( µ ) ( µ ) si A + K C = s s s s (.37) e 3 Con esto tenemos las bases suficientes, para llevar acabo el modelado del sistema en variables de estado, el diseño y el cálculo de las ganancias. Lo cual se llevará acabo en el siguiente capítulo. n 0
34 -Capítulo II- -Análisis del sistema en espacio de estados y diseño del estimador correspondiente- CAPÍTULO II ANÁLISIS DEL SISTEMA EN ESPACIO DE ESTADOS Y DISEÑO DEL ESTIMADOR CORRESPONDIENTE. Introducción En este capítulo se obtiene el diagrama de simulación y el modelo matemático del sistema de levitación en espacio de estados, con base en la función de transferencia del capitulo anterior. Se hace el análisis de controlabilidad y observabilidad, finalmente se calculan las matrices de realimentación y del estimador.. Modelado matemático del sistema en espacio de estados. El modelado matemático del sistema en espacio de estados se realizará con base en la función de transferencia ecuación (.3). Este sistema también puede ser representado de forma matricial, con lo cual se puede analizar la dinámica y respuesta del sistema en espacio de estados Para pasar de la función de transferencia a la representación en variables de estado se realizan los siguientes pasos:. Adecuamos la función de transferencia a la formula de Ganancia Masson (.4), dividiendo el numerador y el denominador entre, lo cual queda de la siguiente s forma:
35 -Capítulo II- -Análisis del sistema en espacio de estados y diseño del estimador correspondiente () = Is () 45.5 s X 0 s s (.). El siguiente paso es construir el diagrama de simulación, en base a la representación de la formula de Masson, ecuación (.4). La cual nos proporciona las siguiente información, el numerador nos indica que la ganancia del camino directo, del diagrama de simulación tiene dos integradores con una ganancia de , figura (.). El denominador nos muestra el orden y la ganancia del lazo de retroalimentación, se puede ver claramente que es de segundo orden y con una ganancia de u( s ) s x x s y( s) Figura.. Diagrama de Simulación del sistema de levitación magnética. 3. Puesto que este diagrama de simulación no dio buenos resultados en algunas pruebas, optamos por hacerle una sencilla modificación. Lo que se realizo fue poner el bloque que tiene la ganancia de en medio de los dos integradores, y dividir la ganancia de entre De esta forma no se afecta el lazo de retroalimentación, ni tampoco la trayectoria directa del sistema. El diagrama de simulación quedo como se muestra. u( s ) s x x s y( s) Figura.. Diagrama de Simulación modificado.
36 -Capítulo II- -Análisis del sistema en espacio de estados y diseño del estimador correspondiente- En el diagrama de simulación podemos ver que cuenta con un sumador, dos bloques de ganancias y dos integradores, los cuales nos dan el grado del sistema. Después de cada integrador esta cada uno de las variables de estado. Lo que se consigue con esto es facilitar el analisis, diseño y simulación del sistema. De ahí importancia del diagrama de simulación en variables de estado. 4. El siguiente paso es obtener la representación del sistema en forma matricial, del diagrama de simulación. En donde, se ve claramente que para obtener el estado x se necesita únicamente a la variable de estado x con una ganancia de y que la entrada no alimenta a este estado. Asimismo para obtener el estado x, se necesita a la variable de estado x con una ganancia de (el signo menos es de la resta), en este caso la entrada si es tomada en cuenta. Las matrices de los estados son construidas sumando las variables de estado que interactúan en cada estado, así como la entrada del sistema. La matriz de salida se construye realizando también la suma de las variables de estado, en este caso únicamente se toma en cuenta a x, la cual es la posición de la esfera y nuestra variable de interés. La representación en variables de estado, que define al sistema de levitación es la siguiente: x x 0 = + u x x (.) x y = [ 0] (.3) x Ya que obtuvimos el diagrama de simulación y la representación matricial en variables de estado, y con el conocimiento antes mencionado, estamos listos para poder hacer el analisis de controlabilidad y observabilidad. Se deduce que el sistema será controlable y observable puesto que se partió de la función de transferencia para hacer el analisis. Se mostrará el analisis de estas condiciones simplemente para ilustrar la metodología. 3
37 -Capítulo II- -Análisis del sistema en espacio de estados y diseño del estimador correspondiente-.3 Análisis de controlabilidad La represtación general en variables de estado que se utilizará para el análisis de controlabilidad y observabilidad, es la de las ecuaciones (.8) y (.9). De donde la representación particular para el sistema de levitación magnética es la que se detalla en las ecuaciones (.) y (.3). Para claridad en el análisis se muestra por separado cada matriz A = (.4) B = (.5) [ 0] C = (.6) En el analisis de controlabilidad únicamente nos interesa la matriz de estados y la matriz de entrada, que son representadas en lo general por la ecuación (.8) y en lo particular por (.4) y (.5).. Como primer paso es necesario construir la matriz de controlabilidad M c, con la ecuación (.0). Para nuestro caso como el sistema es de segundo orden n =, entonces para construir la matriz de controlabilidad queda de la siguiente forma: [ B AB] M c = (.7) AB = = (.8)
38 -Capítulo II- -Análisis del sistema en espacio de estados y diseño del estimador correspondiente- Por lo tanto, la matriz de Controlabilidad, queda finalmente como se muestra a continuación M c = (.9) 0. Finalmente, se determina si el sistema es completamente controlable, esto con la matriz de controlabilidad M c. En la matriz se ve claramente que el sistema es controlable, esto debido a que los vectores son linealmente independientes. Esto significa que no podemos construir uno de los vectores en base al otro simplemente multiplicándolo por alguna cantidad. De igual forma se demuestra si el determinante de la matriz de controlabilidad M c es diferente de cero, si es así el sistema es de estado controlable, como se muestra a continuación. [ ] M = (0)(0) ()( = (.0) C Con esto queda comprobado que el sistema de levitación magnética es controlable..4 Análisis de observabilidad En el analisis de observabilidad, las matrices que intervienen son la matriz de estados A y la matriz de salida C. Las matrices de interés, son las expresadas por las ecuaciones (.4) y (.6). Mediante estas dos matrices obtendremos la matriz de observabilidad, con la metodología ya antes mencionada.. Primero es necesario construir la matriz de observabilidad, con la fórmula (.). En nuestro caso como el sistema es de segundo orden n =, entonces para construir la matriz de observabilidad, la fórmula queda de la siguiente manera C M o = (.) CA 5
39 -Capítulo II- -Análisis del sistema en espacio de estados y diseño del estimador correspondiente CA = [ 0] = [ ] (.) Por lo tanto la matriz de observabilidad, queda de la siguiente forma. 0 M O = (.3) Finalmente solo queda hacer de igual forma el analisis de observabilidad. Se ve claramente que los vectores son linealmente independientes, por lo tanto el sistema es observable. Para comprobarlo el determinante de la matriz de observabilidad tiene que ser diferente de cero. [ ] M = ()( 93.09) (0)(0) = (.4) O Con esto queda comprobado que el sistema es de estado completamente observable..5 Diseño de una realimentación de estados Como ya se explico en el capitulo previo, se supone que todas las variables de estado son medibles y que están disponibles para su realimentación. En esta sección se usara la técnica de asignación de polos, lo cual nos dará como resultado el vector de ganancias K, que se usaran en la realimentación de cada uno de los estados. La única condición necesaria y suficiente para poder realizar esta asignación de polos es que, el sistema sea controlable. Lo cual ya quedo previamente demostrado, con el analisis de controlabilidad. La elección de la ubicación para la asignación de los polos en este diseño, se seleccionara en base los resultados de la respuesta transitoria que el sistema de levitación presento con el compensador de adelanto. En este caso el dato que es de importancia para el diseño, es el tiempo de subida del sistema, el cual es de 0.s, con base en este dato se calculará la asignación de polos. Para que un sistema sea estable, la ubicación de los polos tienen que estar en el semiplano izquierdo del plano s, mientras mas alejados estén del origen la respuesta del sistema será mas rápida, en este caso nos interesa que en 0.s llegué al tiempo de establecimiento. 6
40 -Capítulo II- -Análisis del sistema en espacio de estados y diseño del estimador correspondiente- Con lo ya antes mencionado pasaremos al diseño del controlador, reubicando los polos en [-90-90], con esto se pretende estabilizar al sistema y que su respuesta sea rápida. Obtención de la Matriz de Controlabilidad, ecuación (.9). Matriz M : Esta se obtiene a partir del polinomio característico, con la ecuación (.5). s s ( SI A) = 0 s = s (.5) ( SI A) s 45.5 = (.6) a 0 M = = (.7) 0 0 Obtenemos la matriz de transformación P con la ecuación (.6) y de P P = 0 0 (.8) P = (.9) 0 Realizamos la transformación de la matriz A y B, utilizando las ecuaciones (.7) y (.8). 7
41 -Capítulo II- -Análisis del sistema en espacio de estados y diseño del estimador correspondiente A= P AP= 0 = (.0) B = P B= 0 = (.) Reubicamos los polos por medio de la ecuación (.9). [ ] F = f f BF = [ f f] = f f A BF = = f f 45.5 f f s 0 0 s = 0 s = 45.5 f f f s+ f ( si ( A BF) ) ( 45.5 ) ( ) ( )( ) ( ) si ( A BF) = s s + f f = s + f s 45.5 f (.) El resultado de la ecuación (.) se iguala con el polinomio de la reubicación de los polos que se desea. En este caso los polos tendrán la siguiente ubicación [ 90 90] justificación de su elección., ya antes se mencionó la 8
42 -Capítulo II- -Análisis del sistema en espacio de estados y diseño del estimador correspondiente- ( s + 90) = s + 80s s + f s ( 45.5 f ) = s + 80s ( 45.5 f ) = 800 f = = 0553 f = 80 F = [ ] (.3) Finalmente se determina de la matriz de ganancias de realimentación, haciendo la transformación de la ecuación (.3), con la ecuación (.30) F = FP = [ ] 0 [ ] F = (.4).6 Diseño de un observador Como ya se menciono en el capítulo anterior, no todas las variables de estado son medibles por lo cual es necesario diseñar y construir, un estimador de estados. El diseño de un estimador de estados es completamente independiente del diseño de la retro de estados. Por lo que no nos debe preocupar en lo más mínimo, son dos sistemas independientes que al final se unen para realizar la acción de control. 9
43 -Capítulo II- -Análisis del sistema en espacio de estados y diseño del estimador correspondiente- Se muestra la metodología para calcular la matriz del observador de estados, este desarrollo es el de sustitución directa, el cual es más sencillo que el del cálculo de la realimentación de estados, y es el más adecuado para un sistema de segundo orden. Obtención de la Matriz de Observabilidad, ecuación (.3). Obtenemos el determinante por medio de la ecuación (.36), quedando de la siguiente forma: si A + K C = 0 e s K 0 0 [ ] e 0 s + = K e s K 0 e s + = Ke 0 0 s+ K K e = e s 0 ( ) ( ) s Ke s Ke = 0 (.5) El resultado se iguala con el polinomio de la reubicación de los polos que se desea. En este caso los polos tendrán la siguiente ubicación [ 90 90], se eligió esta ubicación ya que mientras mas alejados estén del origen, mas rápido será la estimación de las variables, razón por la que es conveniente esta ubicación. 30
44 -Capítulo II- -Análisis del sistema en espacio de estados y diseño del estimador correspondiente- ( s + 90) = s + 380s s + ( K ) s + ( K ) e e = s + 380s K e = K e = 3600 K e = 4.65 Finalmente, la matriz del observador, es la siguiente: 380 F = (.6) 4.65 Ya con la matriz de realimentación de estados, y con la matriz del observador; en el siguiente capitulo se llevara acabo las simulaciones del sistema y verificación del diseño. Para lo cual se ocupara el programa computacional Simulink. Si la simulación da la respuesta que se espera, se podrá proceder a construir físicamente el circuito. 3
45 -Capítulo III- -Simulaciones del sistema- CAPÍTULO III SIMULACIONES DEL SISTEMA 3.. Introducción Con base en los resultados del capítulo II, se hace la simulación en Simulink del sistema con realimentación de estados, otra simulación es con el estimador y llevando la acción de control con realimentación de estados estimados. Debido a que el modelo y resultados del capítulo II no pueden ser implementados con amplificadores operacionales, debido a la magnitud de las ganancias, es necesario escalar el sistema. Con esto se obtiene un nuevo modelo del sistema de levitación en espacio de estados, al que se le calcula una realimentación de de estados y un estimador. Se hace la simulación del sistema escalado con realimentación de estados, también se hace la simulación del estimador. En esta simulación se incluyo el signo negativo en los bloques del integrador y sumador, para simular el comportamiento de los opams; también se incluyo condiciones iniciales de 0.0 den el estimador. 3
46 -Capítulo III- -Simulaciones del sistema- 3.. Simulación del sistema con realimentación de estados. Ya con el diseño que se ha hecho previamente pasamos a simular los resultados, esto se realizara con el programa computacional Simulink. Esta verificación es de gran utilidad ya que nos muestra como responde nuestro sistema. Mostrándonos si hay algún error, o si el sistema de control no cumple con su propósito. Esto se realizara con base en el diagrama de simulación de la figura (.), de donde realimentaremos directamente los estados con las ganancias de la matriz K, dadas en la ecuación (.4), con el esquema general de la figura (.8). En la figura (3.) podemos ver como son realimentados cada uno de los estados a la entrada del sistema con la ganancia que nos proporciona la ecuación (.4). Los bloques de integración tendrán condiciones iniciales de 0.0. En la figura (3.) se ve como la respuesta del sistema inicia en -0.7 y se estabiliza en 0.s, llegando a.5 como máximo en amplitud el eje y, siendo el error mínimo. Lo cual satisface las necesidades de nuestro diseño al estabilizarlo y alcanzar dicho tiempo de establecimiento. Figura 3.. Diagrama de simulación del sistema con realimentación de estados 33
47 -Capítulo III- -Simulaciones del sistema- Figura 3.. Respuesta del sistema con realimentación de estados Simulación del sistema con observador de estados. Como ya se mencionó antes el observador, consiste en una reproducción de la planta origina, alimentada por un lado con la entrada del sistema y por el otro lado con la salida del sistema, para que con la diferencia de la salida del sistema y la salida del observador se haga una inyección con las ganancias de la matriz a cada uno de los estados del observador, ecuación (.34). Como se muestra en forma general la construcción de un observador con base en la figura (.9), lo realizaremos de igual forma con el diagrama de simulación, como se muestra en la figura (3.3). Considerando para los integradores del estimador unas condiciones iniciales de 0.0 y para los de la planta condiciones iniciales iguales a cero. 34
48 -Capítulo III- -Simulaciones del sistema- Figura 3.3. Diagrama de simulación del sistema con observador de estados Al realizar el análisis del sistema, verificamos que es de estado controlable y observable. Para lo que realizamos sin mayor problema el cálculo de la matriz de ganancias de la realimentación de estados, como del observador. Teniendo como respuesta de la realimentación de estados la mostrada en la figura (3.4), en la cual podemos ver que el sistema comienza en cero teniendo un máximo sobreimpulso de % y se estabiliza en un tiempo de 0.s con un valor máximo de.4, de donde el error es de 0.4 con respecto a la entrada siendo este aceptable. De igual forma en la figura (3.4) podemos corroborar que el observador realiza la estimación de las variables con una muy buena velocidad y certeza, ya que se ve claramente la similitud de la señal real con la señal estimada, esta comienza en esto debido a las condiciones iniciales de los integradores del observador 35
49 -Capítulo III- -Simulaciones del sistema- Figura 3.4. Respuesta del observador de estados. En la figura (3.5) se muestra la comparación del segundo estado, en donde se que la señal de estimación comienza en un valor de 0.0 debido a las condiciones iniciales, y en un tiempo de 0.05 segundos la señal estimada sigue al estado real. Con lo cual decimos que tenemos una buena estimación en la simulación. 36
50 -Capítulo III- -Simulaciones del sistema- Figura 3.5. Comparación del segundo estado Escalamiento del sistema. Todo el diseño previo es válido, pero para la construcción física con amplificadores operacionales es necesario realizar el escalamiento del sistema, como se muestra a continuación. La saturación de tensión produce errores en la solución. Por otro lado, la tensión máxima en cualquier amplificador no debe ser demasiado pequeña. Para asegurar la exactitud adecuada, es deseable que la variación de tensión de salida en cualquier amplificador operacional, este acotada con los valores de su hoja de especificaciones. Al establecer el diagrama de simulación es deseable que la máxima variación de tensión de salida, sea la misma para cualquier amplificador. A este respecto es de gran importancia elegir la magnitud adecuada de factores de escala. La magnitud de los factores de escala relacionan las tensiones de salida de los amplificadores operacionales con las correspondientes cantidades físicas. 37
51 -Capítulo III- -Simulaciones del sistema- El escalamiento del diagrama de simulación del sistema de levitación electromagnético, se realizo en los siguientes pasos: Con las siguientes ecuaciones diferenciales que representan el sistema de la figura (.), son la base para el escalamiento. x = 45.5x (3.) x = x (3.) Ahora bien reordenemos las variables, para un mejor entendimiento. x x = x = x (3.3) Ahora es necesario que identifiquemos que es x, y esta información la obtenemos de la ecuación (.3), realizándole las siguientes adecuaciones de la ecuación general para un sistema de segundo orden. Cs () ω = Rs () s s n + ζωn + ωn (3.4) Para lo cual nuestra ecuación (.3), queda de la siguiente forma. X ( s) = Is 0 ( ) 45.5 s 45.5 (3.5) De la ecuación (3.5) anterior obtenemos la siguiente información, frecuencia natural no amortiguada y el valor al que tiende nuestro sistema en estado estacionario. ω = n ω = 45.5 = n (3.6) = (3.7) 38
52 -Capítulo III- -Simulaciones del sistema-.ya con la información anterior podemos conocer nuestra ecuación de x, como se muestra a continuación. x = sen49. 57t (3.8) Ahora procedemos a derivar la ecuación (3.8), quedando de acuerdo a la ecuación (3.). x = 84.40cos49.57t (3.9) Ahora sustituimos la ecuación (3.8) en la ecuación (3.), quedando de la siguiente manera. 45.5( ) x = sen t x = 93.08sen49.57t (3.0) El escalamiento del sistema consta en relacionar el voltaje que puede entregarnos el amplificador operacional, con las magnitudes de las ecuaciones de nuestro sistema. Todo esto para que tenga un adecuado funcionamiento. La siguiente figura (3.6) se muestra los voltajes que nos entregaría cada uno de los operacionales, así como de las ganancias que deben tener los integradores. e = k x e = kx e3 = k3x k k s k k 3 s Figura 3.6. Diagrama de simulación analógico para resolver la ecuación (3.), sin factores de escala. De las ecuaciones (3.8), (3.9) y (3.0), se obtiene la siguiente información: Máximo valor de xt ( ) = (3.) Máximo valor de xt ( ) = (3.) Máximo valor de xt ( ) = (3.3) 39
53 -Capítulo III- -Simulaciones del sistema- Ahora se realiza el calculo de cada una de las k s, esto se hace dividiendo el voltaje máximo que puede entregarnos el amplificador operacional (para este caso son 3v) entre el valores máximos de x (t), x () t y x() t. 3 3 k = xmx = = (3.4) k = xmx = = (3.5) k 3 = xmx = = (3.6) Por lo tanto, las ganancias que deben tener los integradores del diagrama de simulación, son las siguientes. k k = (3.7) k k = (3.8) Ya con los factores de escala correspondientes, pasamos a construir el diagrama de simulación. En la siguiente figura (3.7) se muestra, en donde podemos ver las ganancias de cada uno de los amplificadores y los voltajes que tendrá cada uno de los componentes a la salida. e = x e = x e3 = 3.49x ( 49.5 ) ( 49.5 ) s s Figura 3.7. Diagrama de simulación analógico para resolver la ecuación (3.), con factores de escala. 40
54 -Capítulo III- -Simulaciones del sistema- En la figura (3.8) se muestra, la solución completa para dicho problema de escala. Se ve claramente como al multiplicar las ganancias de los dos integradores nos da como resultado 45.5 y esta es la ganancia con la que es realimentada x, para dar como resultado la ecuación (3.). Después del segundo integrador es necesario tener un bloque de una ganancia de , para obtener la salida deseada, como se muestra en la figura. (.). u( s) x 49.5x 45.5x 49.5 s 49.5 s x y( s) Figura 3.8. Diagrama de simulación analógico para el levitador, con factores de escala Adaptación del nuevo modelo Con el escalamiento que se realizó, el modelo matemático sufre una modificación, del siguiente diagrama de simulación obtendremos el nuevo modelo en variables de estado para el levitador. u( s ) 49.5 s x 49.5 s x y( s) Figura 3.9. Diagrama de simulación para el nuevo modelo. De la misma forma como en el capítulo anterior, obtendremos la representación en variables de estado para el nuevo modelo. Debemos tener el debido cuidado en ver que es lo que alimenta cada uno de nuestros estados. Enseguida lo realizaremos matemáticamente. 4
55 -Capítulo III- -Simulaciones del sistema x = x s. 5 x = 49 x (3.9) 49.5 x = x+ u s x = 49.5 x + u [ ] [ ] x = 49.5x u (3.0) y = 3.7x (3.) En las ecuaciones (3.9) y (3.0), tenemos matemáticamente como es que se forman cada uno de los estados; y en la ecuación (3.) la forma en como se obtiene la salida del sistema. Ahora procede a expresar esas mismas ecuaciones en forma matricial, como se muestra enseguida. x x 0 = + u x x (3.) x y = [ 3.7 0] (3.3) x Ahora con esta nueva representación pasaremos a hacer su analisis, para corroborar si es controlable y observable. A continuación se muestra cada una de las matrices que serán ocupadas en dicho analisis A = (3.4) B = (3.5)
56 -Capítulo III- -Simulaciones del sistema- [ 3.7 0] C = (3.6) Cálculo de una nueva realimentación. Con la ecuación (.7), hacemos el analisis de controlabilidad, quedando la matriz de controlabilidad como se muestra a continuación. De donde se observa claramente que su determinante es diferente de cero, por lo tanto el sistema es controlable M C = (3.9) Ahora con la ecuación (.), construimos la matriz de observabilidad, como se muestra en la siguiente ecuación (3.30). Se ve claramente que el determinante de la matriz es diferente de cero, por lo tanto el sistema es de rango completo y es observable M O = (3.30) Quedando demostrado que el sistema es controlable y observable, pasamos al diseño del controlador. Ahora procederemos a hacer el cálculo de la matriz K para la realimentación de los estados. En este caso reubicaremos los polos en [ 95 95], con esto se desea estabilizar al sistema. Como primer paso se construye la matriz de controlabilidad, ecuación (3.9). Matriz M : Esta se obtiene a partir del polinomio característico, con la ecuación (.5), quedando expresado en la ecuación (3.3) s ( SI A) = s s = s ( SI A) = s
57 -Capítulo III- -Simulaciones del sistema- a 0 M = = (3.3) 0 0 Obtenemos la matriz de transformación P ecuación (3.3) y con base en la ecuación (.6). P.ecuación (3.34), 45.5 P = (3.3) P = (3.34) Realizamos la transformación de la matriz A y B, utilizando las ecuaciones (.7) y (.8). 0 A= P AP= (3.35) B = P B= = (3.36) Reubicamos los polos por medio de la expresión matemática (.9) [ ] F = f f BF = [ f f] = f f A BF = = f f 45.5 f f s 0 0 s = 0 s = f f f s+ f ( si( A BF) ) ( ) 44
58 -Capítulo III- -Simulaciones del sistema- ( ) ( )( ) ( ) si ( A BF) = s s + f f = s + f s f (3.37) El resultado de la ecuación (3.37) se iguala con el polinomio de la reubicación de los polos que se desea. En este caso los polos tendrán la siguiente ubicación 95 95, ya antes se menciono la justificación de su elección. [ ] ( s + 95) = s + 90s s + f s ( f ) = s + 90s ( f ) = 905 f = = f = 90 F = [ ] (3.38) Finalmente, se determina de la matriz de ganancias de realimentación, haciendo la transformación de la ecuación (3.38), con base en la ecuación (.30) F = FP = [ ] [ ] F = (3.39) 45
59 -Capítulo III- -Simulaciones del sistema- Ahora como medio de comprobación utilizamos el siguiente programa, el cual se realizo en Matlab. A= [ ; ]; B= [ 0 ;49.5]; J = [-95-95]; K= acker(a,b,j) [ ] K = (3.40) 3.5. Cálculo de un nuevo estimador. Como ya se menciono anteriormente, no todas las variables estan disponibles para su realimentación. Es por eso que nos es necesario contar con un estimador de estados, para lo cual a continuación se hará el cálculo de la matriz del estimador, reubicando los polos en [ 90 90]. Esto se realizará con la metodología de sustitución directa y se comprobara con ayuda de la instrucción del programa Matlab. Obtención de la Matriz de Observabilidad, ecuación (3.30). Obtenemos el determinante con base en la ecuación (.36), quedando expresado en la ecuación (3.4). SI A + K C = 0 e s K [ ] e 0 s + = K e s K 0 e + = s Ke 0 0 s 3.7K Ke s e = 0 46
60 -Capítulo III- -Simulaciones del sistema- ( ) ( ) s Ke s Ke = La ecuación (3.4) se iguala con el polinomio de la reubicación de los polos que se desea. En este caso los polos tendrán la siguiente ubicación [ 90 90], se eligió esta ubicación ya que mientras mas alejados estén del origen, mas rápido será la estimación de las variables, y la ubicación de los polos de estimador deben de ser por lo menos el doble que los de la realimentación, razón por la que es conveniente esta ubicación. ( ) s+ 90 = s + 380s ( ) ( ) s + 3.7K s K = s + 380s e e 3.7K = 380 e K e = 0.05 (3.4) = 3600 K e K e = (3.43) Finalmente la matriz del observador, es la siguiente: K e 0.05 = (3.44) Ahora como medio de comprobación utilizamos el siguiente pequeño programa, el cual se realizo en Matlab. 47
61 -Capítulo III- -Simulaciones del sistema- A= [ ; ]; C= [ ]; J = [-90-90]; K= acker(a,c,j) 0.05 K e = (3.45) Como se mostró en este capitulo en especial, los cálculos y procedimientos teóricos que se realizan sobre algún trabajo; deben sufrir algunas adecuaciones para poder ser implementado físicamente. En este caso se requirió llevar acabo el escalamiento del diagrama de simulación, para poder ser implementado con los amplificadores operacionales Simulaciones del sistema escalado. Como verificación del escalamiento y diseño del estimador, realizaremos las simulaciones correspondientes con Simulink, que son: las simulación de la planta con realimentación directa de los estados y posteriormente la simulación de la planta con observador de estados. La primera simulación se realizó con base en el diagrama de la figura (3.9); como se muestra en la siguiente figura (3.0). Los estados son realimentados directamente de la planta con las ganancias negativas de la ecuación (3.39). Figura 3.0. Diagrama de simulación del sistema con la realimentación de estados 48
62 -Capítulo III- -Simulaciones del sistema- Figura 3.. Respuesta del sistema escalado, con realimentación directa de estados. La figura (3.), muestra el esquema del observador con base en la figura (.9). El observador esta alimentado por la derecha por la señal de control que alimenta la planta original, y por la izquierda por la salida real del sistema. Haciéndose una diferencia entre la salida real y la estimada, para que con este error sean inyectadas las ganancias para estabilizar el observador. Para que los estados estimados sean realimentados con las ganancias para estabilizar la planta. La siguiente simulación se aproxima más a la realidad, ya que se construyeron bloques con base en la ecuación de salida que representa cada uno de los amplificadores operacionales que se usaran, por lo tanto si el amplificador operacional esta en su configuración inversora, el bloque que lo representa contiene en su interior la inversión de signo; se hace lo mismo para el integrador y el sumador. De tal suerte que podemos hacer una comparación clara y objetiva, en las siguientes gráficas entre los estados de la planta con los estados estimados. Ya con esta simulación se tiene la certeza de que se va por buen camino y se ve claramente lo que se espera en la realidad. 49
63 -Capítulo III- -Simulaciones del sistema- Figura 3.. Diagrama de simulación del sistema escalado y en bloques, con observador de estados. Cada uno de los bloques de integración contiene el comportamiento del integrador, con base en la ecuación de ganancia del integrador. En el bloque de integración que contiene dos entradas, funciona como sumador ponderado, en donde se incluye la ganancia del sistema y una ganancia unitaria, como se muestra a continuación: (3.46) V = 49.5 Vdt Vdt o i i Como primera gráfica se muestra la comparación de la salida real contra la estimada, en la figura (3.3). Donde se ve como la señal estimada comienza en -0.0 teniendo un máximo sobre impulso de 0.05 para posteriormente oscilar alrededor de la señal real y llegar a un tiempo de establecimiento de 0. segundos y de ahí en adelante las señales son iguales. 50
64 -Capítulo III- -Simulaciones del sistema- Figura 3.3. Respuesta del observador, comparando la salida real con la estimada. En la figura (3.4) se muestra la comparación del segundo estado real contra el estimado. Se ve claramente en la comparación, como en principio el estado estimado tiene una oscilación que inicia con un vpp que va decreciendo exponencialmente hasta llegar a ser mínima el vpp en un tiempo 0. segundos y de ahí en adelante tiene una oscilación despreciable en torno al estado real. Este resultado es satisfactorio, y lo podemos considerar como una buena estimación del sistema. 5
65 -Capítulo III- -Simulaciones del sistema- Figura 3.4. Comparación del segundo estado. En la figura (3.5), se muestra la comparación del primer estado real contra el estimado. En donde se ve que es menor en magnitud en comparación con la figura (3.3), y de igual forma el estado estimado inicia en 0.0 con una oscilación alrededor del estado real, en 0. segundos la oscilación es casi cero. Para alcanzar la magnitud de la salida, es amplificado este estado por el bloque final de ganancia. 5
66 -Capítulo III- -Simulaciones del sistema- Figura 3.5. Comparación del primer estado. En la figura (3.6) se muestra el error de estimación en la salida, en donde se ve que el máximo valor es de 0. y disminuye exponencialmente hasta 0. segundos, de ahí en adelante el error tiende a cero. Lo que nos indica que hay una buena estimación en el tiempo estacionario con un poco de oscilaciones mínimas en el transitorio. Ahora bien, ya con la certeza de que el sistema de estimación esta funcionando adecuadamente, según las simulaciones. Se tiene todas las bases necesarias para poder pasar a la construcción del sistema de control con amplificadores operacionales, lo cual se llevara acabo en el siguiente capitulo. 53
67 -Capítulo III- -Simulaciones del sistema- Figura 3.6. Diferencia entre la salida real y la estimada. 54
68 -Capítulo IV- -Construcción del estimador y su aplicación al sistema real- CAPÍTULO IV CONSTRUCCIÓN DEL ESTIMADOR Y SU APLICACIÓN AL SISTEMA REAL 4. Introducción Se muestra la ecuación de ganancia de los opacas en su configuración como: inversor, no inversor, integrador, sumador y restador. Con base en el modelo escalado del sistema del capítulo III, se lleva acabo el cálculo de los componentes resistivos de cada uno de los bloques y la construcción de los bloques. Para la implementación se lleva acabo en el siguiente orden:. Se construye y verifica el funcionamiento del sistema con realimentación de estados.. Se construye el estimador y es probado en el sistema del punto numero uno. 3. El estimador es probado en el sistema del punto número uno, llevando acabo la acción de control con una realimentación de estados estimados. 4. Finalmente se lleva acabo la implementación del estimador en el sistema de levitación físico, que es controlado por un PID. 55
69 -Capítulo IV- -Construcción del estimador y su aplicación al sistema real- 4. Amplificadores operacionales Para la construcción física del controlador, se utilizarán amplificadores operacionales, los cuales serán armados según sus configuraciones. En nuestro caso en especifico lo utilizaremos como: sumador, restador, ganancia e integrador. El circuito integrado que utilizamos es el LM34, resistencias y capacitores. Enseguida se mostraran las configuraciones que ocupamos, así como de su expresión matemática. Figura 4. Configuración básica del amplificador inversor A V R = o f v V = i R (4.) i En la figura (4.) se muestra la configuración básica de un amplificador operacional en su forma inversora. El uso que se la dará es como una ganancia, la cual se muestra en la ecuación (4.), la ganancia puede variar ajustando el valor de las resistencias R o R En la figura (4.), se muestra la configuración del amplificador operacional como no inversor; en el cual como su nombre lo indica, no invierte en la salida a la señal de entrada. La ecuación (4.) nos muestra la forma en como se calcula la ganancia de esta configuración, para lo cual únicamente es necesario variar R, dejando fija R para dar estabilidad a la configuración no inversora. Estas dos configuraciones serán usadas como bloques de ganancia en el diagrama de simulación. Únicamente se debe tener el debido cuidado en la forma en como interactúan los signos de cada uno de los bloques. f i 56
70 -Capítulo IV- -Construcción del estimador y su aplicación al sistema real- Figura 4. Configuración básica del amplificador no inversor. A V R = o v V = + i R (4.) Figura 4.3 Sumador inversor. R R V = V + V (4.3) o f f R R 57
71 -Capítulo IV- -Construcción del estimador y su aplicación al sistema real- En la figura (4.3) se muestra la configuración de un amplificador como sumador inversor. En la ecuación (4.3) nos indica que el voltaje de salida es igual a la suma algebraica de los voltajes o señales de entrada, y en este caso con una inversión de fase adicional de 80, de ahí el signo menos en la expresión. Cada uno de estos voltajes se Rf escala por la razón. Por este motivo, a este circuito se le llama sumador de escala, R n y nos ofrece una gran ventaja en nuestro caso. Figura 4.4 Circuito Restador. R = (4.4) ( ) f Vo V V R El circuito de la figura (4.4) tiene la finalidad de proporcionar un voltaje de salida, igual a la diferencia entre el voltaje o señal aplicada a la entrada no inversora (+) V, y el aplicado a la entrada inversora (-) V, multiplicada por una ganancia que va a depender de los resistores. En la práctica y para facilitar el analisis, se hacen iguales todas las resistencias. La ecuación (4.4), nos indica claramente lo ya antes mencionado, también es claro que no hay inversión de signo en la señal. En la figura (4.5) se muestra el circuito integrador, el voltaje de salida es proporcional a la integral del voltaje de entrada. Dicho circuito, realiza la integración, usando un amplificador operacional en la configuración inversora, se consigue que la corriente de la R sea la misma que la del capacitor de retroalimentación C. i f 58
72 -Capítulo IV- -Construcción del estimador y su aplicación al sistema real- La ecuación (4.5), muestra como se obtiene el voltaje de salida, la ganancia del circuito se da por. El voltaje de salida cambia en V por cada volt de entrada, y en k R C RC s i f se pueden incluir las condiciones iniciales. i f Figura 4.5 Integrador simple. Vo = Vdt i + k RC (4.5) i f 4.3 Construcción del estimador. Para la construcción del controlador se ocuparan amplificadores operacionales, en las configuraciones ya antes mencionadas, que sustituirán cada uno de los bloques de los diagramas de simulación. Debido a que con los amplificadores operacionales hay inversión de signo, se debe tener mucho cuidado en no cometer errores y si así lo requiere hacer alguna modificación al circuito. Para tener un orden, verificar y poder llegar exitosamente a nuestro objetivo, que es el de implementarle al levitador un controlador en variables de estado. Tendremos los siguientes pasos previos a la implementación directa del controlador: 59
73 -Capítulo IV- -Construcción del estimador y su aplicación al sistema real- Construcción de la planta con realimentación directa de estados Construcción del estimador con la planta simulada, con realimentación directa de estados. Implementación del estimador con la planta simulada, con realimentación de estados estimados Construcción de la planta, con realimentación directa de estados. Con base en el diagrama de simulación de la figura (3.8), el cual ya fue previamente escalado, se realizará la construcción de la planta. Pero debido a que nuestro sistema es inestable, lo estabilizaremos con la realimentación de estados, los estados para la realimentación se toman directamente de la planta, como se muestra en la figura (3.0). A continuación indicaremos las especificaciones y los cálculos, de cada uno de los circuitos. Sumador Inversor: En este caso tendrá tres entradas, y todas las resistencias tendrán el mismo valor para que tenga ganancia unitaria R f = R = R = R = 00KΩ 3. Integrador: Para el cálculo de su ganancia, se utilizará la ecuación (4.5). Para lo cual se propone el valor del capacitor C = µ F, siendo más fácil variar el valor de la resistencia. Y a la entrada de la realimentación de x, tendrá una Ri = R C i f R i = MΩ. = = 0.97KΩ (4.6) (49.58)( µf) No Inversor, de la planta: Para el cálculo de su ganancia, se utilizará la ecuación (4.); proponiendo R = 00KΩ. 00KΩ 4.66 = + R 00KΩ 3.66 = R 60
74 -Capítulo IV- -Construcción del estimador y su aplicación al sistema real- R = KΩ (4.7) No Inversor, de realimentación: Para el cálculo de su ganancia, se utilizará la ecuación (4.); proponiendo R = 00KΩ. 00KΩ = + R 00KΩ = R R = KΩ (4.8) Inversor, de realimentación: Para el cálculo de su ganancia, se utilizará la ecuación (4.); proponiendo R f = 00 KΩ. 00KΩ = R R i = KΩ (4.9) Figura 4.6 Diagrama eléctrico de la planta con realimentación de estados. 6
, en donde se ve que los estados del sistema están después de cada uno de los integradores.")
75 -Capítulo IV- -Construcción del estimador y su aplicación al sistema real- Ya con los cálculos realizados, se armo el circuito correspondiente, como se muestra en la figura (4.6), en donde se ve que los estados del sistema están después de cada uno de los integradores. También se muestra la conexión de la señal de referencia, a la cual se desea que llegué el sistema; después se encuentra la señal de control. Enseguida se muestran los valores de cada uno de los componentes para la figura (4.6). R = R R R R i ix = 0.97KΩ = MΩ = KΩ R3 = KΩ R = 7.746KΩ 4 C = µ F = R f = 00KΩ (4.0) En la figura (4.7) se muestra la señal de referencia para el sistema de levitación, con un voltaje pico a pico de.9 volts y una frecuencia de 00 Hz. Lo que se desea es que el sistema se estabilice y siga esta referencia dándonos una posición de levitación de la esfera. Figura 4.7. Señal de referencia aplicada al sistema. El propósito de este paso es verificar el diagrama de simulación escalado del levitador funcione adecuadamente; para posteriormente agregar el estimador de estados. En la figura (4.8), se muestra como responde el sistema con la realimentación de estados. Se ve claramente que tiene un muy buen funcionamiento, ya que se estabiliza el sistema y sigue la referencia. 6

76 -Capítulo IV- -Construcción del estimador y su aplicación al sistema real- Figura 4.8. Respuesta del sistema con realimentación directa de estados Construcción del estimador, y su aplicación a la planta previamente estabilizada. En este punto se realizó la construcción, del observador de estados, siendo implementado en la planta del punto anterior, para asegurarnos que el observador funcione adecuadamente. A diferencia del punto anterior, simplemente se agrega el circuito del estimador. El cual consta de una reproducción del sistema real, con dos ganancias que se inyectan a cada uno de los estados con la diferencia de la salida real y la estimada, esto para estabilizarlo. El cálculo de dichas ganancias ya se realizó en el capitulo anterior, a continuación se calculará el valor de las resistencias, para obtener dichas ganancias. No Inversor, de realimentación: Para el cálculo de su ganancia, se utilizará la ecuación (4.); proponiendo R = 00KΩ. 00KΩ = + R 00KΩ = R R = Ω (4.) 63
77 -Capítulo IV- -Construcción del estimador y su aplicación al sistema real- No Inversor, de realimentación: Para el cálculo de su ganancia, se utilizará la ecuación (4.); proponiendo R = 00KΩ. 00KΩ = + R 00KΩ = R R = Ω (4.) Los valores de resistencias son los mimos del punto anterior, solo cambian las siguientes dos resistencias. R3 = Ω (4.3) R = Ω 4 En la figura (4.9) se muestra el diagrama eléctrico del estimador de estados, en donde se ve claramente en que resistencia entra cada una de las señales que alimentan al estimador. También se como son alimentadas las ganancias del estimador con la diferencia entre las señal de salida real y la estimada. De igual forma, se muestra de que punto son tomados los estados estimados El circuito de la figura (4.9) es alimentado con las señales u (t) y y (t) que son generadas por el circuito de la figura (4.6). Los resultados de este experimento fueron positivos, y se hicieron para verificar que el observador funcione. Pero en realidad esto no nos asegura que funcione correctamente el observador, para lo cual en el siguiente punto es donde realmente se verá si el observador estima los estados y si realmente hay una acción de control con realimentación de estados estimados. 64
78 -Capítulo IV- -Construcción del estimador y su aplicación al sistema real- Figura 4.9. Diagrama eléctrico del estimador de estados Control por retroalimentación de estados estimados. En este punto se realizará la implementación del observador de estados en la planta simulada, con base en la figura (.9). Ahora los estados estimados son realimentados, como lo indica el control en variables de estado, ya que de esta forma se verificara la estimación de cada uno de los estados de la planta original. Para su construcción se ocupan los circuitos de la figuras (4.6) y (4.9), pero a diferencia del circuito de la figura (4.6), la realimentación es con los estados estimados. Con este procedimiento se desea tener la certeza que el estimador funcione adecuadamente, para posteriormente ser implementado en la planta real. En la figura (4.0) se tiene el diagrama a bloques de esta implementación, en el cual cada uno de los bloques representa a un amplificador operacional en su configuración indicada y con su ganancia previamente calculada, como se muestra en los circuitos de las figuras (4.6) y (4.9). Se ve como son realimentados los estados estimados en la planta simulada, con lo cual se lleva acabo la acción de control del sistema simulado. 65
79 -Capítulo IV- -Construcción del estimador y su aplicación al sistema real- r () t () t u y () t s No Inversor s No Inversor Inversor ˆx ˆx ŷ () t s No Inversor s No Inversor No Inversor Figura 4.0. Diagrama a bloques del observador, con realimentación de estados estimados. En la figura (4.) se tiene, la señal de referencia del sistema r () t, en el canal uno del osciloscopio, con una magnitud de.36 vpp. y con una frecuencia de.99 Hz., esta baja frecuencia fue elegida para aproximarnos a un escalón, y tener una idea de cómo se comportaría el sistema en el tiempo estacionario. También se tiene la señal de salida real del sistema y () t en el canal dos, con una magnitud de. vpp. y una frecuencia de.98 Hz., esta señal es resultado de una buena estimación. Yo con los estados estimados se lleva acabo la realimentación de estados, para lo cual podemos decir que hay una perfecta acción de control en el sistema, ya que se estabiliza adecuadamente el sistema y la salida sigue a la referencia; En la señal de salida hay una inversión de signo con respecto a la entrada, esto se debe al signo negativo propio del diagrama de simulación del sistema, figura (3.9). 66
, se tiene la comparación de la señal real del sistema, la cual tiene una frecuencia 3 Hz. y.")

80 -Capítulo IV- -Construcción del estimador y su aplicación al sistema real- Figura 4.. Señal de entrada y salida, del sistema. En la siguiente figura (4.), se tiene la comparación de la señal real del sistema, la cual tiene una frecuencia 3 Hz. y.3 vpp, dicha comparación se hace con la salida del observador, la cual tiene la misma frecuencia y amplitud. Lo cual nos indica que el sistema esta funcionando adecuadamente, al ver que la señal del observador es idéntica a la referencia. Con lo cual podemos decir que el observador esta estimando adecuadamente, y que la realimentación de estados con sus ganancias esta llevando acabo una adecuada acción de control. Figura 4.. Señal de salida real y estimada. Para tener una perfecta acción de control en variables de estado, debe de haber una adecuada estimación de cada uno de los estados, de lo contrario no podrían ser realimentados. Siendo la estimación, la parte que requiere mayor cuidado con esta metodología. En las siguientes figuras (4.3) y (4.4), se muestra cada uno de los estados del sistema, dichas señales son tomadas después de los integradores. 67

, tiene la comparación del estado x con ˆx, en donde se ve claramente como el observador estima adecuadamente dicho estado ˆx, solamente tiene un poco de oscilación, pero sin mayor problema ya que")
81 -Capítulo IV- -Construcción del estimador y su aplicación al sistema real- Figura 4.3. Estado uno, real y estimado. En la figura (4.3), tenemos al estado x y ˆx. Se ve claramente que hay una perfecta estimación de dicho estado y que no varia mucho del estado real, solamente aumenta un poco en amplitud el estado estimado y oscila en un 0.% en referencia al estado real. La figura (4.4), tiene la comparación del estado x con ˆx, en donde se ve claramente como el observador estima adecuadamente dicho estado ˆx, solamente tiene un poco de oscilación, pero sin mayor problema ya que es alrededor del estado real. En este caso no se tiene la información de amplitud y frecuencia, debido a que es muy pequeña y el osciloscopio no logra dar esa información. Figura 4.4. Estado dos, real y estimado. 68
82 -Capítulo IV- -Construcción del estimador y su aplicación al sistema real- 4.4 Aplicación del estimador al sistema de levitación físico. En este punto se aplicara el estimador en el sistema real, figura (.), pero siendo este controlado por un PID con lo cual se estabilizara el sistema. Y ya siendo controlado el sistema, el estimador será conectado como se muestra en la figura (4.5). Figura 4.5. Diagrama a bloques de la implementación del estimador al sistema real. El controlador PID fue calculado por medio del lugar geométrico de las raíces, proponiendo un punto de operación con un factor de amortiguamiento de 0.7 y con un tiempo de establecimiento de segundo. Esto nos da como resultado una frecuencia natural no amortiguada, ecuación (4.4) y un punto de operación cuya ubicación esta dada por la ecuación (4.5). 4 ω n = = (4.4) 0.7 ( n ) s= εω ± j ω ε = 4± j4 (4.5) n Con los cálculos en el lugar geométrico de las raíces, la función de transferencia del PID con sus ganancias queda expresada de la siguiente forma. ( s + ) G () C s = (4.6) s 69
83 -Capítulo IV- -Construcción del estimador y su aplicación al sistema real- A continuación se muestra el diagrama eléctrico del restador y del controlador PID, en la figura (4.6). Figura 4.6. Diagrama eléctrico del PID. Los valores de los componentes eléctricos del circuito de la figura (4.6) son los siguientes. R C = R = C R3 = KΩ R = 00Ω 4 R = 00KΩ = 7.7KΩ = 0µ F (4.7) Realizando las conexiones como lo indica la figura (4.5), sustituyendo cada uno de los bloques por el circuito correspondiente a las figuras (4.9) y (4.6), se lleva acabo la implementación físicamente del estimador de estados analógico en el sistema de levitación. Con lo cual comprobaremos el funcionamiento del estimador. 70

 se muestra la respuesta del levitador en donde podemos ver claramente como varia la posición de la señal, teniendo un máximo sobré impulso, en el cambio de la posición, para posteriormente")
84 -Capítulo IV- -Construcción del estimador y su aplicación al sistema real- Como señal de referencia es una onda cuadrada con una vpp=.5volts, esta onda varia de desde.5volts hasta 3volts. Con lo cual se asegura que la esfera no se caiga, y varié su desplazamiento vertical entre.5mm y 3mm, esto para poder visualizar la respuesta del sistema de levitación y del estimador, en el osciloscopio. En la figura (4.7) se muestra la respuesta del levitador en donde podemos ver claramente como varia la posición de la señal, teniendo un máximo sobré impulso, en el cambio de la posición, para posteriormente establecerse. Figura 4.7. Respuesta del sistema con el PID. En la figura (4.8) se muestra la salida estimada y ˆ( t), en donde se ve un adecuado funcionamiento del estimador, al comparar esta señal con la de la figura (4.7) se ve que son idénticas en amplitud y la señal estimada sigue adecuadamente a la señal real en su comportamiento en el tiempo. Aumentado los volts por división en el osciloscopio tenemos la figura (4.9), que es la señal de salida estimada, en donde se ve el cambio de posición de la esfera y las oscilaciones que tiene la señal estimada. Figura 4.8. Salida estimada por el observador. 7



85 -Capítulo IV- -Construcción del estimador y su aplicación al sistema real- Figura 4.9. Salida estimada por el observador. En la figura (4.0) se muestra la señal de estimación del segundo estado, en donde los impulsos representan la velocidad con que cambia de posición la esfera metálica, para posteriormente tender cero. En donde solamente hay un impulso positivo corresponde al cambio de posición de la parte inferior a la superior. La estimación de esta señal es muy significativa, ya que en el sistema de levitación no se tiene acceso a ella, y no se tiene un dispositivo que nos proporcione esta información, es en la estimación de este estado donde se encuentra el valor de este trabajo. Figura 4.0. Segundo estado estimado. Figura 4.. Segundo estado estimado, ampliado. 7
 con la (4.0), se observan los picos que representan la velocidad con que cambia de posición el balín. En la figura (4.")
86 -Capítulo IV- -Construcción del estimador y su aplicación al sistema real- En la figura (4.), se muestra el segundo estado estimado, ampliando la grafica en el eje del tiempo. Al comparar la figura (4.) con la (4.0), se observan los picos que representan la velocidad con que cambia de posición el balín. En la figura (4.) esta representado el cambio de posición de arriba hacia abajo, con lo que podemos ver que hay máximo sobreimpulso en el cambio y que regresa rápidamente al punto de referencia, para posteriormente tener unas mínimas oscilaciones alrededor de cero, este comportamiento se puede verificar en la figura (4.7) En la figura (4.) se muestra la señal de error con respecto a la estimación de la señal de salida. En donde se que el error de estimación es mínimo, lo que se comprueba al ver que los valores de voltaje de la figura están en mv, con esto podemos decir que el estimador tiene un mínimo error en la estimación. Figura 4.. Error de estimación de la salida. 73
87 CONCLUSIÓNES Y PERSPECTIVAS En este trabajo se presentó el analisis en variables de estado del sistema de levitación, y el diseño de un estimador de estados. Se llevo acabo la simulación del sistema de levitación y su control con una realimentación de estados, esto se construyó con amplificadores operacionales. Teniendo buenos resultados en la construcción y en la estabilización del sistema simulado. El estimador fue construido igualmente con amplificadores operacionales, fue implementado en la simulación del sistema de levitación, y para estabilizarlo se llevo acabo una realimentación de estados estimados, para comprobar una de las opciones del control en espacio de estados. Se obtuvieron buenos resultados en esta implementación al comparar las señales que nos proporcionó el sistema simulado y el estimador; observando una buena estimación de los estados. Finalmente el estimador fue implementado en el sistema de levitación real, siendo el sistema controlado por un PID. Se llevo acabo satisfactoriamente el control del sistema, logrando con ello que el balín levitara, y la estimación de las señales fue excelente, siendo estimados los estados del sistema y la salida. Es de importancia la estimación del segundo estado, ya que este no esta disponible para su medición en el sistema de levitación, y de ser posible su medición no se cuenta con el instrumento que lo haga. Con la estimación de los estados del sistema se llevó acabo el monitoreo de su comportamiento en tiempo real. 74
88 Las perspectivas que se tienen sobre este trabajo son: o o o o o o Llevar acabo la acción de control en el sistema real con una realimentación de estados estimados. Realizar el diseño de los compensadores digitales por métodos de respuesta en frecuencia, utilizando la transformada w como herramienta matemática y realizar la adquisición de datos con tarjetas especializadas como las de National Instruments. Ampliar el rango de desplazamiento del objeto levitante a dos y tres dimensiones, para realizar movimientos controlados de alta presión. Se puede mejorar mucho el desempeño del sistema realizando diseño de controladores donde se incluyan otras variables que interactúan en el funcionamiento del mismo, como puede ser la temperatura de la bobina; que para este trabajo no se han tomado en cuenta. Para fines didácticos, el sistema puede ser adaptado con sistemas digitales que permitan visualizar por medio de displays, la posición de la esfera, la corriente a través de la bobina, la temperatura de la misma; todo esto con el fin de que otras áreas de la ingeniería se vinculen con un sistema de control. Se puede dar seguimiento a los sistemas de levitación usando materiales superconductores, los cuales presentan características diamagnéticas, es decir se puede realizar el sistema de control cambiando las características de la planta de acuerdo al comportamiento del objeto levitante. 75
89 APÉNDICE A 76
90 77
91 78
92 79
93 80
94 8
95 8
96 83
97 84
98 85
99 86
100 87
101 88
102 APÉNDICE B 89
103 90
104 9
105 9
106 93
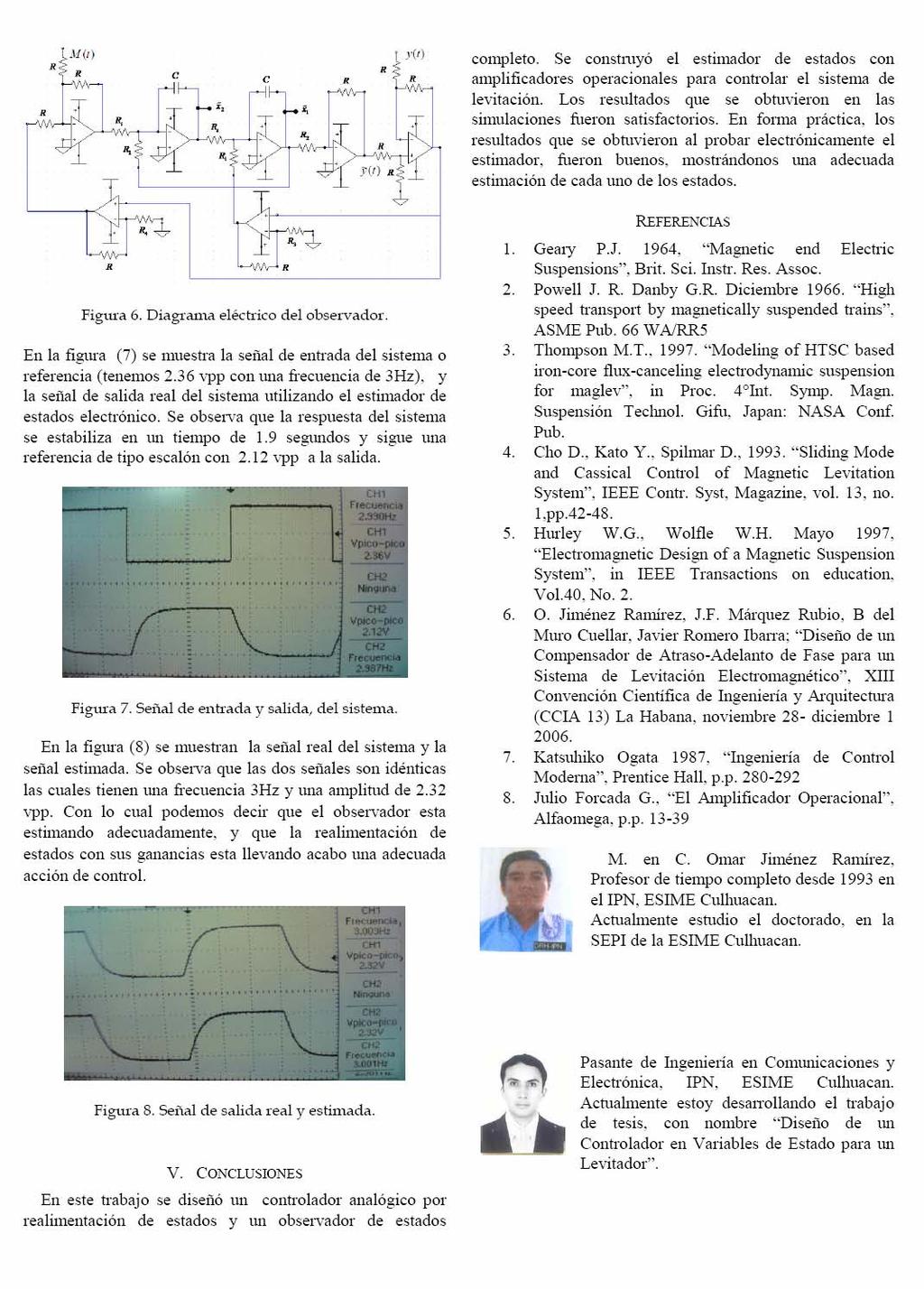
107 94
Teoría de Control Moderna
 1! Modelos en Variables de Estado Juan Antonio Hernández Tamames, Susana Borromeo Curso 2014-2015 Teoría de Control Moderna 2! Teoría de control clásica basada en la relación entrada-salida o función de
1! Modelos en Variables de Estado Juan Antonio Hernández Tamames, Susana Borromeo Curso 2014-2015 Teoría de Control Moderna 2! Teoría de control clásica basada en la relación entrada-salida o función de
Control Moderno. Ene.-Jun Observabilidad y Observadores de Estado. Dr. Rodolfo Salinas. mayo 2007
 UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN Facultad de Ingeniería Mecánica y Eléctrica Control Moderno Ene.-Jun. 2007 Observabilidad y Observadores de Estado Dr. Rodolfo Salinas mayo 2007 Control Moderno N1 mayo
UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN Facultad de Ingeniería Mecánica y Eléctrica Control Moderno Ene.-Jun. 2007 Observabilidad y Observadores de Estado Dr. Rodolfo Salinas mayo 2007 Control Moderno N1 mayo
Parte I. Diseño utilizando Variables de Estado
 Parte I. Diseño utilizando Variables de Estado El control de un proceso representado a través de variables de estado nos proporciona la ventaja de que se tendrán a todas las variables del proceso cumpliendo
Parte I. Diseño utilizando Variables de Estado El control de un proceso representado a través de variables de estado nos proporciona la ventaja de que se tendrán a todas las variables del proceso cumpliendo
CONTROL ANALÓGICO I. MODELADO MATEMÁTICOS DE SISTEMAS DE CONTROL Unidad II
 CONTROL ANALÓGICO I MODELADO MATEMÁTICOS DE SISTEMAS DE CONTROL Unidad II Modelado de sistemas Con la finalidad de diseñar y analizar el comportamiento dinámico de un sistema físico, es necesario obtener
CONTROL ANALÓGICO I MODELADO MATEMÁTICOS DE SISTEMAS DE CONTROL Unidad II Modelado de sistemas Con la finalidad de diseñar y analizar el comportamiento dinámico de un sistema físico, es necesario obtener
FUNDAMENTOS Y MODELOS MATEMÁTICOS DE LOS SISTEMAS DE CONTROL UNIDAD 1
 FUNDAMENTOS Y MODELOS MATEMÁTICOS DE LOS SISTEMAS DE CONTROL UNIDAD 1 Contenido El concepto de realimentación. Establecimiento de las ecuaciones diferenciales que rigen a un sistema. Función de transferencia.
FUNDAMENTOS Y MODELOS MATEMÁTICOS DE LOS SISTEMAS DE CONTROL UNIDAD 1 Contenido El concepto de realimentación. Establecimiento de las ecuaciones diferenciales que rigen a un sistema. Función de transferencia.
UNIVERSIDAD NACIONAL DEL CALLAO
 UNIVERSIDAD NACIONAL DEL CALLAO FACULTAD DE INGENIERIA ELECTRICA Y ELECTRONICA INSTITUTO DE INVESTIGACION DE LA FACULTAD DE INGENIERIA ELECTRICA Y ELECTRONICA INFORME FINAL DEL TEXTO TEXTO: DISEÑO DE SISTEMAS
UNIVERSIDAD NACIONAL DEL CALLAO FACULTAD DE INGENIERIA ELECTRICA Y ELECTRONICA INSTITUTO DE INVESTIGACION DE LA FACULTAD DE INGENIERIA ELECTRICA Y ELECTRONICA INFORME FINAL DEL TEXTO TEXTO: DISEÑO DE SISTEMAS
1 Control Óptimo. 1.1 Introducción Problema típico de control óptimo
 1 Control Óptimo 1.1 Introducción El control óptimo es una rama del control moderno que se relaciona con el diseño de controladores para sistemas dinámicos tal que se minimice una función de medición que
1 Control Óptimo 1.1 Introducción El control óptimo es una rama del control moderno que se relaciona con el diseño de controladores para sistemas dinámicos tal que se minimice una función de medición que
donde,, es controlable si y solo si la matriz de controlabilidad tiene rango,
 TEORÍA DE CONTROL Tema 8. Controlabilidad y Observabilidad La controlabilidad y la observabilidad son dos conceptos desarrollados para la representación de sistemas en espacio de estado, estos permiten
TEORÍA DE CONTROL Tema 8. Controlabilidad y Observabilidad La controlabilidad y la observabilidad son dos conceptos desarrollados para la representación de sistemas en espacio de estado, estos permiten
2.1 Descripción en espacio de estado de sistemas dinámicos
 2 Análisis de sistemas lineales 2.1 Descripción en espacio de estado de sistemas dinámicos El objetivo de este capítulo es formular una teoría general de describir los sistemas dinámicos en funcion de
2 Análisis de sistemas lineales 2.1 Descripción en espacio de estado de sistemas dinámicos El objetivo de este capítulo es formular una teoría general de describir los sistemas dinámicos en funcion de
Controlabilidad completa del estado para sistemas en tiempo continuo
 Capítulo 11: CONTROLABILIDAD Y OBSERVABILIDAD Se dice que un sistema es controlable en el instante t0 si es posible llevarlo de cualquier estado inicial x(t0) a cualquier otro estado, empleando un vector
Capítulo 11: CONTROLABILIDAD Y OBSERVABILIDAD Se dice que un sistema es controlable en el instante t0 si es posible llevarlo de cualquier estado inicial x(t0) a cualquier otro estado, empleando un vector
= = Amplificador inversor. Considere el amplificador operacional de la figura Obtengamos el voltaje de salida
 Amplificadores operacionales. Los amplificadores operacionales, también conocidos como amp ops, se usan con frecuencia para amplificar las señales de los circuitos Los amp ops también se usan con frecuencia
Amplificadores operacionales. Los amplificadores operacionales, también conocidos como amp ops, se usan con frecuencia para amplificar las señales de los circuitos Los amp ops también se usan con frecuencia
MODELACION EN VARIABLES DE ESTADO
 CAPÍTULO VIII INGENIERÍA DE SISTEMAS I MODELACION EN VARIABLES DE ESTADO 8.1. DEFINICIONES Estado: El estado de un sistema dinámico es el conjunto más pequeño de variables de modo que el conocimiento de
CAPÍTULO VIII INGENIERÍA DE SISTEMAS I MODELACION EN VARIABLES DE ESTADO 8.1. DEFINICIONES Estado: El estado de un sistema dinámico es el conjunto más pequeño de variables de modo que el conocimiento de
Modelos en el Espacio de Estado
 José Luis Rodríguez, PhD, Octubre del 00 Modelos en el Espacio de Estado Introducción: La tendencia moderna en la ingeniería de sistemas es hacia una complejidad cada vez mayor, debido principalmente a
José Luis Rodríguez, PhD, Octubre del 00 Modelos en el Espacio de Estado Introducción: La tendencia moderna en la ingeniería de sistemas es hacia una complejidad cada vez mayor, debido principalmente a
Dinámica del Robot. UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides
 UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción La dinámica se ocupa de la relación entre las fuerzas que actúan sobre un cuerpo y el movimiento en el que se origina.
UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción La dinámica se ocupa de la relación entre las fuerzas que actúan sobre un cuerpo y el movimiento en el que se origina.
CAPÍTULO. Control Proporcional Integral Generalizado. II.1 Introducción. II. Control Proporcional Integral Generalizado
 CAPÍTULO II Control Proporcional Integral Generalizado II.1 Introducción El uso de observadores en electrónica de potencia no es una práctica común debido al incremento en el costo del circuito; es decir,
CAPÍTULO II Control Proporcional Integral Generalizado II.1 Introducción El uso de observadores en electrónica de potencia no es una práctica común debido al incremento en el costo del circuito; es decir,
Control Moderno. Ene.-Jun Diseño de controlador por retroalimentación de estado. Dr. Rodolfo Salinas. mayo 2007
 UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN Facultad de Ingeniería Mecánica y Eléctrica Control Moderno Ene.-Jun. 2007 Diseño de controlador por retroalimentación de estado Dr. Rodolfo Salinas mayo 2007 Control
UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN Facultad de Ingeniería Mecánica y Eléctrica Control Moderno Ene.-Jun. 2007 Diseño de controlador por retroalimentación de estado Dr. Rodolfo Salinas mayo 2007 Control
01/07/2009. Ecuaciones dinámicas del motor. Fig. 1 circuito equivalente del motor de CD con excitación independiente.
 Control de Máquinas Eléctricas Primavera 2009 1. Análisis vectorial de sistema trifásicos 1. Campo magnético 2. Devanado trifásico 3. Vector espacial de un sistema de corrientes 4. Representación gráfica
Control de Máquinas Eléctricas Primavera 2009 1. Análisis vectorial de sistema trifásicos 1. Campo magnético 2. Devanado trifásico 3. Vector espacial de un sistema de corrientes 4. Representación gráfica
4-1 INTRODUCCIÓN Señales de prueba típicas. 134
 4-1 INTRODUCCIÓN En el capítulo 3 se planteó que el primer paso para analizar un sistema de control era obtener un modelo matemático del mismo. Una vez obtenido tal modelo, existen varios métodos para
4-1 INTRODUCCIÓN En el capítulo 3 se planteó que el primer paso para analizar un sistema de control era obtener un modelo matemático del mismo. Una vez obtenido tal modelo, existen varios métodos para
Sistemas de Control lineal óptimo con realimentación de estado
 Capítulo 5 Sistemas de Control lineal óptimo con realimentación de estado La principal restricción de este sistema de control es suponer que se puede medir en todo instante de tiempo el estado completo
Capítulo 5 Sistemas de Control lineal óptimo con realimentación de estado La principal restricción de este sistema de control es suponer que se puede medir en todo instante de tiempo el estado completo
Unidad V Respuesta de los sistemas de control
 Unidad V Respuesta de los sistemas de control MC Nicolás Quiroz Hernández Un controlador automático compara el valor real de la salida de una planta con la entrada de referencia (el valor deseado), determina
Unidad V Respuesta de los sistemas de control MC Nicolás Quiroz Hernández Un controlador automático compara el valor real de la salida de una planta con la entrada de referencia (el valor deseado), determina
CONTROL APLICADO MODELADO DE SISTEMAS DINÁMICOS
 CONTROL APLICADO MODELADO DE SISTEMAS DINÁMICOS MODELO MATEMÁTICO SISTEMA SE NECESITA CONOCER MODELO MATEMÁTICO CARACTERÍSTICAS DINÁMICAS DEBE REPRESENTAR BIEN NO ES ÚNICO Tenga presente que un modelo
CONTROL APLICADO MODELADO DE SISTEMAS DINÁMICOS MODELO MATEMÁTICO SISTEMA SE NECESITA CONOCER MODELO MATEMÁTICO CARACTERÍSTICAS DINÁMICAS DEBE REPRESENTAR BIEN NO ES ÚNICO Tenga presente que un modelo
11 REPRESENTACIÓN EN EL ESPACIO DE ESTADO. 1.3 SOLUCIÓN DE ECUACIONES DE ESTADO EN TIEMPO
 Control Avanzado. Luis Edo García Jaimes 1 TABLA DE CONTENIDO 1. ANÁLISIS DE SISTEMAS DE CONTROL EN EL ESPACIO DE 5 ESTADO 1.1 FORMAS CANÓNICAS PARA ECUACIONES EN EL ESPACIO DE ESTADO EN TIEMPO DISCRETO
Control Avanzado. Luis Edo García Jaimes 1 TABLA DE CONTENIDO 1. ANÁLISIS DE SISTEMAS DE CONTROL EN EL ESPACIO DE 5 ESTADO 1.1 FORMAS CANÓNICAS PARA ECUACIONES EN EL ESPACIO DE ESTADO EN TIEMPO DISCRETO
Departamento de Ingeniería Eléctrica y Electrónica. Guía de Prácticas de Laboratorio. Materia: Control I. Laboratorio de Ingeniería Electrónica
 Instituto Tecnológico de Querétaro Departamento de Ingeniería Eléctrica y Electrónica Guía de Prácticas de Laboratorio Materia: Control I Laboratorio de Ingeniería Electrónica Santiago de Querétaro, Qro.
Instituto Tecnológico de Querétaro Departamento de Ingeniería Eléctrica y Electrónica Guía de Prácticas de Laboratorio Materia: Control I Laboratorio de Ingeniería Electrónica Santiago de Querétaro, Qro.
1. Modelos Matemáticos y Experimentales 1
 . Modelos Matemáticos y Experimentales. Modelos Matemáticos y Experimentales.. Definición.. Tipos de Procesos.3. Tipos de Modelos 3.4. Transformada de Laplace 4.5. Función de Transferencia 7.6. Función
. Modelos Matemáticos y Experimentales. Modelos Matemáticos y Experimentales.. Definición.. Tipos de Procesos.3. Tipos de Modelos 3.4. Transformada de Laplace 4.5. Función de Transferencia 7.6. Función
Unidad I Análisis de Sistemas Realimentados
 Prof. Gerardo Torres - gerardotorres@ula.ve - Cubículo 003 Departamento de Circuitos y Medidas de la Escuela de Ingeniería Eléctrica de la Universidad de Los Andes Unidad I Análisis de Sistemas Realimentados
Prof. Gerardo Torres - gerardotorres@ula.ve - Cubículo 003 Departamento de Circuitos y Medidas de la Escuela de Ingeniería Eléctrica de la Universidad de Los Andes Unidad I Análisis de Sistemas Realimentados
LABORATORIO DE FÍSICA TEORÍA DE GRÁFICAS
 Página 1 de 15 LABORATORIO DE FÍSICA TEORÍA DE GRÁFICAS OBJETIVO Las gráficas se utilizan para estudiar y comprender el mecanismo de un fenómeno observado, a la vez por medio del análisis de ellas se puede
Página 1 de 15 LABORATORIO DE FÍSICA TEORÍA DE GRÁFICAS OBJETIVO Las gráficas se utilizan para estudiar y comprender el mecanismo de un fenómeno observado, a la vez por medio del análisis de ellas se puede
MECÁNICA CLÁSICA CINEMATICA. FAyA Licenciatura en Química Física III año 2006
 Física III año 26 CINEMATICA MECÁNICA CLÁSICA La cinemática estudia el movimiento de los cuerpos, sin tener en cuenta las causas que lo producen. Antes de continuar establezcamos la diferencia entre un
Física III año 26 CINEMATICA MECÁNICA CLÁSICA La cinemática estudia el movimiento de los cuerpos, sin tener en cuenta las causas que lo producen. Antes de continuar establezcamos la diferencia entre un
INDICE Capitulo 1. El concepto del circuito magnético Capitulo 2. Excitación de estructuras ferromagnéticas con corriente directa
 INDICE Capitulo 1. El concepto del circuito magnético 1-1. introducción 1 1-2. algunas leyes básicas de electrostática 3 1-3. algunas leyes básicas de magnetostática 8 1-4. otras conclusiones útiles en
INDICE Capitulo 1. El concepto del circuito magnético 1-1. introducción 1 1-2. algunas leyes básicas de electrostática 3 1-3. algunas leyes básicas de magnetostática 8 1-4. otras conclusiones útiles en
Control Moderno. Ene.-Jun Diseño de controlador con referencia a la entrada, servosistemas. Dr. Rodolfo Salinas. mayo 2007
 UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN Facultad de Ingeniería Mecánica y Eléctrica Control Moderno Ene.-Jun. 2007 Diseño de controlador con referencia a la entrada, servosistemas Dr. Rodolfo Salinas mayo 2007
UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN Facultad de Ingeniería Mecánica y Eléctrica Control Moderno Ene.-Jun. 2007 Diseño de controlador con referencia a la entrada, servosistemas Dr. Rodolfo Salinas mayo 2007
Fecha de Elaboración Fecha de Revisión. Circuitos III HTD HTC HTA Asignatura. Básica de Ingeniería
 UNIVERSIDAD DISTRITAL Francisco José de Caldas Facultad de Ingeniería Ingeniería Eléctrica Elaboró Revisó Diana S. García M. con el Material de la Coordinación [Escriba aquí el nombre] Fecha de Elaboración
UNIVERSIDAD DISTRITAL Francisco José de Caldas Facultad de Ingeniería Ingeniería Eléctrica Elaboró Revisó Diana S. García M. con el Material de la Coordinación [Escriba aquí el nombre] Fecha de Elaboración
Control PID. Sintonización e implementación
 Control PID. Sintonización e implementación Elizabeth Villota Cerna Curso: Ingeniería de Control (MT221) Facultad de Ingeniería Mecánica UNI-FIM Julio 2012 1 Control PID Control PID una de las formas más
Control PID. Sintonización e implementación Elizabeth Villota Cerna Curso: Ingeniería de Control (MT221) Facultad de Ingeniería Mecánica UNI-FIM Julio 2012 1 Control PID Control PID una de las formas más
DIAGRAMAS DE ESTADO. Fernando di Sciascio (2016)
") DIAGRAMAS DE ESTADO Fernando di Sciascio (2016) Diagramas de Estado Los Diagramas de Estado son una extensión de los diagramas de flujo señal y permiten describir gráficamente ecuaciones diferenciales
DIAGRAMAS DE ESTADO Fernando di Sciascio (2016) Diagramas de Estado Los Diagramas de Estado son una extensión de los diagramas de flujo señal y permiten describir gráficamente ecuaciones diferenciales
Diagramas de Bloques
 1! Diagrama de Bloques y Grafos Juan Antonio Hernández Tamames, Susana Borromeo Curso 2014-2015 Diagramas de Bloques 2! Representación en Diagramas de Bloques Álgebra de Bloques 1 Ideas Básicas 3! Los
1! Diagrama de Bloques y Grafos Juan Antonio Hernández Tamames, Susana Borromeo Curso 2014-2015 Diagramas de Bloques 2! Representación en Diagramas de Bloques Álgebra de Bloques 1 Ideas Básicas 3! Los
Álvaro Andrés Velásquez T. Depto. de Ciencias Básicas Septiembre de 2009
 Álvaro Andrés Velásquez T. Depto. de Ciencias Básicas Septiembre de 2009 Estructura de un curso teórico práctico básico de ciencias Estructura de un curso teórico práctico con proyecto de materia Importancia
Álvaro Andrés Velásquez T. Depto. de Ciencias Básicas Septiembre de 2009 Estructura de un curso teórico práctico básico de ciencias Estructura de un curso teórico práctico con proyecto de materia Importancia
CAMPO ELÉCTRICO, ENERGÍA POTENCIAL ELÉCTRICA, POTENCIAL ELÉCTRICO.
 CAMPO ELÉCTRICO, ENERGÍA POTENCIAL ELÉCTRICA, POTENCIAL ELÉCTRICO. Cuando una partícula con carga se mueve en un campo eléctrico, el campo ejerce una fuerza que efectúa trabajo sobre la partícula. Este
CAMPO ELÉCTRICO, ENERGÍA POTENCIAL ELÉCTRICA, POTENCIAL ELÉCTRICO. Cuando una partícula con carga se mueve en un campo eléctrico, el campo ejerce una fuerza que efectúa trabajo sobre la partícula. Este
EXPOSITORES: LUIS FELIPE CASTRILLÓN LARGO ANDRES FELIPE GÓMEZ GÓMEZ. Proyecto de grado Para optar el título de Tecnólogo en Electricidad
 EXPOSITORES: LUIS FELIPE CASTRILLÓN LARGO ANDRES FELIPE GÓMEZ GÓMEZ Director: Ing. Antonio H. Escobar Zuluaga Programa de Tecnología Eléctrica Proyecto de grado Para optar el título de Tecnólogo en Electricidad
EXPOSITORES: LUIS FELIPE CASTRILLÓN LARGO ANDRES FELIPE GÓMEZ GÓMEZ Director: Ing. Antonio H. Escobar Zuluaga Programa de Tecnología Eléctrica Proyecto de grado Para optar el título de Tecnólogo en Electricidad
PROBLEMAS PROPUESTOS. TEMAS 1 A 4 SOLUCIONES
 Grado en Ingeniería Mecánica Teoría de Sistemas PROBLEMAS PROPUESTOS. TEMAS A 4 SOLUCIONES PROBLEMA. Cálculo de transformada de Laplace a) Por aplicación de la definición de la transformada. Aplicando
Grado en Ingeniería Mecánica Teoría de Sistemas PROBLEMAS PROPUESTOS. TEMAS A 4 SOLUCIONES PROBLEMA. Cálculo de transformada de Laplace a) Por aplicación de la definición de la transformada. Aplicando
El amplificador operacional
 Tema 7 El amplificador operacional Índice 1. Introducción... 1 2. El amplificador diferencial... 2 3. El amplificador operacional... 5 3.1. Configuración inversora... 7 3.2. Configuración no inversora...
Tema 7 El amplificador operacional Índice 1. Introducción... 1 2. El amplificador diferencial... 2 3. El amplificador operacional... 5 3.1. Configuración inversora... 7 3.2. Configuración no inversora...
INDICE Capitulo 1. Variables y Leyes de Circuitos 1.1. Corriente, Voltaje y Potencia 1.2. Fuentes y Cargas (1.1) 1.3. Ley de Ohm y Resistores (1.
 1.3. Ley de Ohm y Resistores (1.") INDICE Capitulo 1. Variables y Leyes de Circuitos 1 1.1. Corriente, Voltaje y Potencia 3 Carga y corriente * Energía y voltaje * Potencia eléctrica * Prefijos de magnitud 1.2. Fuentes y Cargas (1.1) 11
INDICE Capitulo 1. Variables y Leyes de Circuitos 1 1.1. Corriente, Voltaje y Potencia 3 Carga y corriente * Energía y voltaje * Potencia eléctrica * Prefijos de magnitud 1.2. Fuentes y Cargas (1.1) 11
DATOS DE IDENTIFICACIÓN DEL CURSO DEPARTAMENTO:
 DATOS DE IDENTIFICACIÓN DEL CURSO DEPARTAMENTO: Departamento de Electrónica ACADEMIA A LA QUE PERTENECE: Control Automático NOMBRE DE LA MATERIA: Control Moderno CLAVE DE LA MATERIA: ET303 CARÁCTER DEL
DATOS DE IDENTIFICACIÓN DEL CURSO DEPARTAMENTO: Departamento de Electrónica ACADEMIA A LA QUE PERTENECE: Control Automático NOMBRE DE LA MATERIA: Control Moderno CLAVE DE LA MATERIA: ET303 CARÁCTER DEL
Representación en el espacio de estado. Sistemas Control Embebidos e Instrumentación Electrónica UNIVERSIDAD EAFIT
 Representación en el espacio de estado Representación en espacio de estado Control clásico El modelado y control de sistemas basado en la transformada de Laplace, es un enfoque muy sencillo y de fácil
Representación en el espacio de estado Representación en espacio de estado Control clásico El modelado y control de sistemas basado en la transformada de Laplace, es un enfoque muy sencillo y de fácil
INGENIERIA DE CONTROL II
 INGENIERIA DE CONTROL II COMPETENCIAS QUE ADQUIERE EL ESTUDIANTE Y RESULTADOS DEL APRENDIZAJE: El objetivo de este curso es que el estudiante conozca los conceptos básicos necesarios para realizar el control
INGENIERIA DE CONTROL II COMPETENCIAS QUE ADQUIERE EL ESTUDIANTE Y RESULTADOS DEL APRENDIZAJE: El objetivo de este curso es que el estudiante conozca los conceptos básicos necesarios para realizar el control
PROBLEMAS PROPUESTOS. TEMAS 5 Y 6 SOLUCIONES
 Grado en Ingeniería Mecánica Teoría de Sistemas PROBLEMAS PROPUESTOS. TEMAS 5 Y 6 SOLUCIONES Transformada Z. Función de transferencia discreta. Modelado de sistemas discretos. PROBLEMA 1. Sistema discreto
Grado en Ingeniería Mecánica Teoría de Sistemas PROBLEMAS PROPUESTOS. TEMAS 5 Y 6 SOLUCIONES Transformada Z. Función de transferencia discreta. Modelado de sistemas discretos. PROBLEMA 1. Sistema discreto
TÉCNICO SUPERIOR UNIVERSITARIO EN PROCESOS INDUSTRIALES ÁREA SISTEMAS DE GESTIÓN DE LA CALIDAD EN COMPETENCIAS PROFESIONALES
 TÉCNICO SUPERIOR UNIVERSITARIO EN PROCESOS INDUSTRIALES ÁREA SISTEMAS DE GESTIÓN DE LA CALIDAD EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ELECTRICIDAD Y MAGNETISMO 1. Competencias Plantear y solucionar
TÉCNICO SUPERIOR UNIVERSITARIO EN PROCESOS INDUSTRIALES ÁREA SISTEMAS DE GESTIÓN DE LA CALIDAD EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ELECTRICIDAD Y MAGNETISMO 1. Competencias Plantear y solucionar
TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ELECTRICIDAD Y MAGNETISMO
 TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ELECTRICIDAD Y MAGNETISMO 1. Competencias Plantear y solucionar problemas con base en los principios
TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ELECTRICIDAD Y MAGNETISMO 1. Competencias Plantear y solucionar problemas con base en los principios
Prefacio. 1 Sistemas de control
 INGENIERIA DE CONTROL por BOLTON Editorial Marcombo Prefacio 1 Sistemas de control Sistemas Modelos Sistemas en lazo abierto y cerrado Elementos básicos de un sistema en lazo abierto Elementos básicos
INGENIERIA DE CONTROL por BOLTON Editorial Marcombo Prefacio 1 Sistemas de control Sistemas Modelos Sistemas en lazo abierto y cerrado Elementos básicos de un sistema en lazo abierto Elementos básicos
CAPÍTULO 3 3. DESARROLLO DEL SOFTWARE DE CONTROL
 8 CAPÍTULO 3 3. DESARROLLO DEL SOFTWARE DE CONTROL En este capítulo se explica lo concerniente a la obtención de modelos matemáticos que sirven como base para el diseño del controlador de corriente y velocidad
8 CAPÍTULO 3 3. DESARROLLO DEL SOFTWARE DE CONTROL En este capítulo se explica lo concerniente a la obtención de modelos matemáticos que sirven como base para el diseño del controlador de corriente y velocidad
Plataforma de contenidos interactivos. Página Web del libro. Mecatrónica Introducción Origen de la mecatrónica 5
 Contenido Plataforma de contenidos interactivos XXI Página Web del libro XXII Prólogo XXVII Capítulo 1 Mecatrónica 1 1.1 Introducción 3 1.2 Origen de la mecatrónica 5 1.2.1 Qué es mecatrónica? 9 Mecatrónica
Contenido Plataforma de contenidos interactivos XXI Página Web del libro XXII Prólogo XXVII Capítulo 1 Mecatrónica 1 1.1 Introducción 3 1.2 Origen de la mecatrónica 5 1.2.1 Qué es mecatrónica? 9 Mecatrónica
TECNICAS DE DISEÑO Y COMPENSACION
 TECNICAS DE DISEÑO Y COMPENSACION Técnicas para sistemas SISO invariantes en el tiempo Basadas en el lugar de las raices y respuesta en frecuencia Especificaciones de funcionamiento Exactitud o precisión
TECNICAS DE DISEÑO Y COMPENSACION Técnicas para sistemas SISO invariantes en el tiempo Basadas en el lugar de las raices y respuesta en frecuencia Especificaciones de funcionamiento Exactitud o precisión
TEORÍA DE PUESTAS A TIERRA. Johny Montaña
 TEORÍA DE PUESTAS A TIERRA Johny Montaña Barranquilla - Bogotá Colombia, 2011 CONTENIDO Prólogo... xi 1. Análisis de electrodos de puesta a tierra en baja frecuencia...1 Punto fuente de corriente, 3. Línea
TEORÍA DE PUESTAS A TIERRA Johny Montaña Barranquilla - Bogotá Colombia, 2011 CONTENIDO Prólogo... xi 1. Análisis de electrodos de puesta a tierra en baja frecuencia...1 Punto fuente de corriente, 3. Línea
EXAMEN PARCIAL I
 UNIVERSIDAD NACIONAL DE INGENIERÍA - FIM MT 7 Control Moderno y Óptimo EXAMEN PARCIAL - 04I Problema : Un tanque vacio con masa m o es posicionado sobre g un resorte lineal con rigidez k. El tanque es
UNIVERSIDAD NACIONAL DE INGENIERÍA - FIM MT 7 Control Moderno y Óptimo EXAMEN PARCIAL - 04I Problema : Un tanque vacio con masa m o es posicionado sobre g un resorte lineal con rigidez k. El tanque es
Sistemas Automáticos. Modelado de sistemas. D. Tardioli, R. Martínez Centro Universitario de la Defensa Academia General Militar A. A.
 Sistemas Automáticos Modelado de sistemas D. Tardioli, R. Martínez Centro Universitario de la Defensa Academia General Militar A. A. 2016/2017 Sistemas Automáticos Índice Obtención de modelos Modelado
Sistemas Automáticos Modelado de sistemas D. Tardioli, R. Martínez Centro Universitario de la Defensa Academia General Militar A. A. 2016/2017 Sistemas Automáticos Índice Obtención de modelos Modelado
DINÁMICA ESTRUCTURAL. Diagramas de bloques
 DINÁMICA ESTRUCTURAL Diagramas de bloques QUÉ ES UN DIAGRAMA DE BLOQUES? Definición de diagrama de bloques: Es una representación gráfica de las funciones que lleva a cabo cada componente y el flujo de
DINÁMICA ESTRUCTURAL Diagramas de bloques QUÉ ES UN DIAGRAMA DE BLOQUES? Definición de diagrama de bloques: Es una representación gráfica de las funciones que lleva a cabo cada componente y el flujo de
6. Diagramas de flujo.
 Ingeniería de Control I Tema 6 Diagramas de flujo 1 6. Diagramas de flujo. Representación en DF Simplificaciones Fórmula de Mason Formas de Kalman Sistemas MIMO Diagramas de Flujo 2 1 Bibliografía Señales
Ingeniería de Control I Tema 6 Diagramas de flujo 1 6. Diagramas de flujo. Representación en DF Simplificaciones Fórmula de Mason Formas de Kalman Sistemas MIMO Diagramas de Flujo 2 1 Bibliografía Señales
Lugar Geométrico de las Raíces Herramienta para diseño de sistemas de control
 Lugar Geométrico de las Raíces Herramienta para diseño de sistemas de control Elizabeth Villota Curso: Ingeniería de Control (MT221) Facultad de Ingeniería Mecánica UNI-FIM 1 Modelado Modelo: representación
Lugar Geométrico de las Raíces Herramienta para diseño de sistemas de control Elizabeth Villota Curso: Ingeniería de Control (MT221) Facultad de Ingeniería Mecánica UNI-FIM 1 Modelado Modelo: representación
Control. Controlar. variable controlada variable manipulada Control realimentado. Sistema. Sistemas de control realimentado.
 Clase 1 Definir: Control. Poder o dominio que una persona u objeto ejerce sobre alguien o algo (En ingeniería: Conjunto de mecanismos y dispositivos que regulan el funcionamiento de una máquina, un aparato
Clase 1 Definir: Control. Poder o dominio que una persona u objeto ejerce sobre alguien o algo (En ingeniería: Conjunto de mecanismos y dispositivos que regulan el funcionamiento de una máquina, un aparato
Nombre del formato: Planeación del Curso y Avance Programático. Referencia a la Norma ISO 9001: , 7.2.1, 7.5.1, 7.6, 8.1, 8.2.
 Página 1 de 8 INSTITUTO TECNOLÓGICO DE MÉRIDA SUBDIRECCIÓN ACADÉMICA DEPARTAMENTO DE ELECTRICA Y ELECTRÓNICA PLANEACIÓN DEL CURSO Y AVANCE PROGRAMÁTICO DEL PERIODO ENERO-JUNIO 20 MATERIA: CONTROL 1 HT
Página 1 de 8 INSTITUTO TECNOLÓGICO DE MÉRIDA SUBDIRECCIÓN ACADÉMICA DEPARTAMENTO DE ELECTRICA Y ELECTRÓNICA PLANEACIÓN DEL CURSO Y AVANCE PROGRAMÁTICO DEL PERIODO ENERO-JUNIO 20 MATERIA: CONTROL 1 HT
Schmeigel Nicolas. Marzo 2014
 Transformada de Laplace: Intercambiador de calor Schmeigel Nicolas Estudiante de Ingeniería en Sistemas de Computación Universidad Nacional del Sur, Avda. Alem 1253, B8000CPB Bahía Blanca, Argentina nicoschmeigel@gmail.com
Transformada de Laplace: Intercambiador de calor Schmeigel Nicolas Estudiante de Ingeniería en Sistemas de Computación Universidad Nacional del Sur, Avda. Alem 1253, B8000CPB Bahía Blanca, Argentina nicoschmeigel@gmail.com
Nombre del formato: Planeación del Curso y Avance Programático. Referencia a la Norma ISO 9001: , 7.2.1, 7.5.1, 7.6, 8.1, 8.2.
 Página 1 de 8 INSTITUTO TECNOLÓGICO DE MÉRIDA SUBDIRECCIÓN ACADÉMICA DEPARTAMENTO DE ELECTRICA Y ELECTRÓNICA PLANEACIÓN DEL CURSO Y AVANCE PROGRAMÁTICO DEL PERIODO Feb./Jun. 2 MATERIA: CONTROL 1 HT 3 HP
Página 1 de 8 INSTITUTO TECNOLÓGICO DE MÉRIDA SUBDIRECCIÓN ACADÉMICA DEPARTAMENTO DE ELECTRICA Y ELECTRÓNICA PLANEACIÓN DEL CURSO Y AVANCE PROGRAMÁTICO DEL PERIODO Feb./Jun. 2 MATERIA: CONTROL 1 HT 3 HP
Contenido. Circuitos Eléctricos - Dorf. Alfaomega
 CAPÍTULO 1 Variables de circuitos eléctricos... 1 1.1 Introducción... 1 1.2 Circuitos eléctricos y corriente... 1 1.3 Sistemas de unidades... 5 1.4 Voltaje... 7 1.5 Potencia y energía... 7 1.6 Análisis
CAPÍTULO 1 Variables de circuitos eléctricos... 1 1.1 Introducción... 1 1.2 Circuitos eléctricos y corriente... 1 1.3 Sistemas de unidades... 5 1.4 Voltaje... 7 1.5 Potencia y energía... 7 1.6 Análisis
OBJETIVO DEL ACTUADOR. Regular el movimiento de un cuerpo que se debe trasladar controladamente de una posición a otra.
 OBJETIVO DEL ACTUADOR Regular el movimiento de un cuerpo que se debe trasladar controladamente de una posición a otra. El control del movimiento puede ser, según la aplicación: I.- Control de posición.
OBJETIVO DEL ACTUADOR Regular el movimiento de un cuerpo que se debe trasladar controladamente de una posición a otra. El control del movimiento puede ser, según la aplicación: I.- Control de posición.
Nombre del formato: Formato para la Instrumentación Didáctica del Periodo. Referencia a la Norma ISO 9001: , 7.2.1, 7.5.1, 7.
 Referencia a la Norma ISO 9001:2008 7.1, 7.2.1, 7.5.1, 7.6 Página 1 de 15 INSTITUTO TECNOLÓGICO DE MÉRIDA SUBDIRECCIÓN ACADÉMICA Instrumentación didáctica para la formación y desarrollo de competencias
Referencia a la Norma ISO 9001:2008 7.1, 7.2.1, 7.5.1, 7.6 Página 1 de 15 INSTITUTO TECNOLÓGICO DE MÉRIDA SUBDIRECCIÓN ACADÉMICA Instrumentación didáctica para la formación y desarrollo de competencias
GRADO: CURSO: 3 CUATRIMESTRE:
 DENOMINACIÓN ASIGNATURA: Ingeniería de Control I GRADO: CURSO: 3 CUATRIMESTRE: La asignatura tiene 29 sesiones que se distribuyen a lo largo de 14 semanas. Los laboratorios pueden situarse en cualquiera
DENOMINACIÓN ASIGNATURA: Ingeniería de Control I GRADO: CURSO: 3 CUATRIMESTRE: La asignatura tiene 29 sesiones que se distribuyen a lo largo de 14 semanas. Los laboratorios pueden situarse en cualquiera
TÉCNICO SUPERIOR UNIVERSITARIO EN MANTENIMIENTO ÁREA INDUSTRIAL EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ELECTRICIDAD Y MAGNETISMO
 TÉCNICO SUPERIOR UNIVERSITARIO EN MANTENIMIENTO ÁREA INDUSTRIAL EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ELECTRICIDAD Y MAGNETISMO 1. Competencias Plantear y solucionar problemas con base en los principios
TÉCNICO SUPERIOR UNIVERSITARIO EN MANTENIMIENTO ÁREA INDUSTRIAL EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ELECTRICIDAD Y MAGNETISMO 1. Competencias Plantear y solucionar problemas con base en los principios
Observadores del estado
 Observadores del estado Introducción Definición Dinámica del sistema con observador monovariables multivariables U.P.M.-DISAM P. Campoy Control en el espacio de estado 1 Introducción Concepto: el observador
Observadores del estado Introducción Definición Dinámica del sistema con observador monovariables multivariables U.P.M.-DISAM P. Campoy Control en el espacio de estado 1 Introducción Concepto: el observador
Observadores de estados
 Universidad Nacional de La Plata Facultad de Ingeniería Departamento de Electrotecnia Cátedra de Control Moderno Observadores de estados Ricardo Julián Mantz Año 23 1. Introducción Hemos visto que para
Universidad Nacional de La Plata Facultad de Ingeniería Departamento de Electrotecnia Cátedra de Control Moderno Observadores de estados Ricardo Julián Mantz Año 23 1. Introducción Hemos visto que para
Fuerza de origen magnético en conductores
 Práctica 10 Fuerza de origen magnético en conductores Elaborado por: Revisado por: Autorizado por: Vigente a partir de : M.I. Juan Carlos Cedeño Vázquez Ing. Juan Manuel Gil Pérez Ing. Francisco Miguel
Práctica 10 Fuerza de origen magnético en conductores Elaborado por: Revisado por: Autorizado por: Vigente a partir de : M.I. Juan Carlos Cedeño Vázquez Ing. Juan Manuel Gil Pérez Ing. Francisco Miguel
TEORÍA DE PUESTAS A TIERRA. Johny Montaña
 TEORÍA DE PUESTAS A TIERRA Johny Montaña Barranquilla - Bogotá Colombia, 2011 CONTENIDO Prólogo... xi 1. Análisis de electrodos de puesta a tierra en baja frecuencia...1 Punto fuente de corriente, 3. Línea
TEORÍA DE PUESTAS A TIERRA Johny Montaña Barranquilla - Bogotá Colombia, 2011 CONTENIDO Prólogo... xi 1. Análisis de electrodos de puesta a tierra en baja frecuencia...1 Punto fuente de corriente, 3. Línea
Documento No Controlado, Sin Valor
 TÉCNICO SUPERIOR UNIVERSITARIO EN ENERGÍAS RENOVABLES ÁREA CALIDAD Y AHORRO DE ENERGÍA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ELECTRICIDAD Y MAGNETISMO 1. Competencias Plantear y solucionar problemas
TÉCNICO SUPERIOR UNIVERSITARIO EN ENERGÍAS RENOVABLES ÁREA CALIDAD Y AHORRO DE ENERGÍA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ELECTRICIDAD Y MAGNETISMO 1. Competencias Plantear y solucionar problemas
UNIVERSIDAD DE SANTIAGO DE CHILE FACULTAD DE INGENIERÍA Departamento de Ingeniería Mecánica
 INGENIERÍA CIVIL EN MECÁNICA GUÍA DE LABORATORIO ASIGNATURA METROLOGÍA Y SISTEMAS DE MEDICIÓN CODIGO 15154 NIVEL 06 EXPERIENCIA C547 COMPORTAMIENTO DINÁMICO DE LOS SISTEMAS DE MEDICIÓN 1 COMPORTAMIENTO
INGENIERÍA CIVIL EN MECÁNICA GUÍA DE LABORATORIO ASIGNATURA METROLOGÍA Y SISTEMAS DE MEDICIÓN CODIGO 15154 NIVEL 06 EXPERIENCIA C547 COMPORTAMIENTO DINÁMICO DE LOS SISTEMAS DE MEDICIÓN 1 COMPORTAMIENTO
Teoría de Sistemas y Señales
 Teoría de Sistemas y Señales Problemas Propuestos Serie 5 Descripción: Análisis de Sistemas Lineales Estacionarios en TC en el dominio Transformado de Laplace. Álgebra de bloques. 1. Obtenga la Transformada
Teoría de Sistemas y Señales Problemas Propuestos Serie 5 Descripción: Análisis de Sistemas Lineales Estacionarios en TC en el dominio Transformado de Laplace. Álgebra de bloques. 1. Obtenga la Transformada
EL TREN DE LEVITACIÓN MAGNÉTICA
 EL TREN DE LEVITACIÓN MAGNÉTICA Son varios los países que han trabajado en el desarrollo de los sistemas de levitación magnética en los ferrocarriles, aunque actualmente sólo Alemania y Japón tienen proyectos
EL TREN DE LEVITACIÓN MAGNÉTICA Son varios los países que han trabajado en el desarrollo de los sistemas de levitación magnética en los ferrocarriles, aunque actualmente sólo Alemania y Japón tienen proyectos
Contenido. Alfaomega. Circuitos Eléctricos - Dorf. Prefacio xiii
 Prefacio xiii CAPÍTULO 1 Variables de circuitos eléctricos... 1 1.1 Introducción... 1 1.2 Circuitos eléctricos y corriente... 1 1.3 Sistemas de unidades... 5 1.4 Voltaje... 7 1.5 Potencia y energía...
Prefacio xiii CAPÍTULO 1 Variables de circuitos eléctricos... 1 1.1 Introducción... 1 1.2 Circuitos eléctricos y corriente... 1 1.3 Sistemas de unidades... 5 1.4 Voltaje... 7 1.5 Potencia y energía...
FECHA DE ASIGNACIÓN: 05 - febrero
 UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FISICOMECÁNICAS ESCUELA DE INGENIERÍA ELÉCTRICA, ELECTRÓNICA Y TELECOMUNICACIONES Programa de Ingeniería Eléctrica NOMBRE DE LA ASIGNATURA: CONTROL
UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FISICOMECÁNICAS ESCUELA DE INGENIERÍA ELÉCTRICA, ELECTRÓNICA Y TELECOMUNICACIONES Programa de Ingeniería Eléctrica NOMBRE DE LA ASIGNATURA: CONTROL
Parámetros Estadísticos básicos, Resumen y Presentación de datos. Jhon Jairo Padilla, PhD.
 Parámetros Estadísticos básicos, Resumen y Presentación de datos Jhon Jairo Padilla, PhD. Motivación Los resúmenes y las representaciones de datos son esenciales porque: Enfocan al ingeniero en características
Parámetros Estadísticos básicos, Resumen y Presentación de datos Jhon Jairo Padilla, PhD. Motivación Los resúmenes y las representaciones de datos son esenciales porque: Enfocan al ingeniero en características
Antecedentes de Control
 Apéndice A Antecedentes de Control Para cualquier tipo de análisis de sistemas de control, es importante establecer ciertos conceptos básicos. Sistemas de control retroalimentados Un sistema que mantiene
Apéndice A Antecedentes de Control Para cualquier tipo de análisis de sistemas de control, es importante establecer ciertos conceptos básicos. Sistemas de control retroalimentados Un sistema que mantiene
PLAN DE EVALUACIÓN ACREDITACIÓN
 PLAN DE EVALUACIÓN ACREDITACIÓN ASIGNATURA: MATEMÁTICAS IV SEDE: ESTATAL SEMESTRE: CUARTO CORTE: I BLOQUES: I, II, III PERIODO: 2018-1 DESEMPEÑO A DEMOSTRAR COMPETENCIAS A DESARROLLAR EVIDENCIA A EVALUAR
PLAN DE EVALUACIÓN ACREDITACIÓN ASIGNATURA: MATEMÁTICAS IV SEDE: ESTATAL SEMESTRE: CUARTO CORTE: I BLOQUES: I, II, III PERIODO: 2018-1 DESEMPEÑO A DEMOSTRAR COMPETENCIAS A DESARROLLAR EVIDENCIA A EVALUAR
d m φ dt ξ = Por otro lado, por definición, la fem es la integral del campo a lo largo de una trayectoria C, o trayectoria cerrada
 Tema: Inducción magnética. Facultad de Ingeniería. Escuela de Eléctrica. Asignatura: Teoría Electromagnética. I. Objetivos. Comprender acerca de la relación del voltaje inducido en una bobina, en función
Tema: Inducción magnética. Facultad de Ingeniería. Escuela de Eléctrica. Asignatura: Teoría Electromagnética. I. Objetivos. Comprender acerca de la relación del voltaje inducido en una bobina, en función
DIAGRAMAS DE ESTADO. Fernando di Sciascio (2017)
") DIAGRAMAS DE ESTADO Fernando di Sciascio (2017) Diagramas de Estado Los Diagramas de Estado son una extensión de los diagramas de flujo señal y permiten describir gráficamente ecuaciones diferenciales
DIAGRAMAS DE ESTADO Fernando di Sciascio (2017) Diagramas de Estado Los Diagramas de Estado son una extensión de los diagramas de flujo señal y permiten describir gráficamente ecuaciones diferenciales
LABORATORIO No. 0. Cálculo de errores en las mediciones. 0.1 Introducción
 LABORATORIO No. 0 Cálculo de errores en las mediciones 0.1 Introducción Es bien sabido que la especificación de una magnitud físicamente medible requiere cuando menos de dos elementos: Un número y una
LABORATORIO No. 0 Cálculo de errores en las mediciones 0.1 Introducción Es bien sabido que la especificación de una magnitud físicamente medible requiere cuando menos de dos elementos: Un número y una
Julián Andrés Herrera Valencia Felipe A. Marulanda Castro
 Julián Andrés Herrera Valencia Felipe A. Marulanda Castro Los motores de inducción son muy utilizados en los procesos industriales para suministrar potencia mecánica y, de esta manera, realizar tareas
Julián Andrés Herrera Valencia Felipe A. Marulanda Castro Los motores de inducción son muy utilizados en los procesos industriales para suministrar potencia mecánica y, de esta manera, realizar tareas
Control Analógico II M.I. Isidro Ignacio Lázaro Castillo
 UNIDAD I Método del lugar de las raíces Control Analógico II M.I. Isidro Ignacio Lázaro Castillo Antecedentes históricos En 1948 Walter R. Evans introdujo este método que es gráfico y elegante para la
UNIDAD I Método del lugar de las raíces Control Analógico II M.I. Isidro Ignacio Lázaro Castillo Antecedentes históricos En 1948 Walter R. Evans introdujo este método que es gráfico y elegante para la
Control Moderno: Paradigmas y Desafíos
 Control Moderno: Paradigmas y Desafíos Elizabeth Villota Cerna Curso: Ingeniería de Control (MT221) Facultad de Ingeniería Mecánica 1 Paradigma del control por realimentación entradas exógenas salidas
Control Moderno: Paradigmas y Desafíos Elizabeth Villota Cerna Curso: Ingeniería de Control (MT221) Facultad de Ingeniería Mecánica 1 Paradigma del control por realimentación entradas exógenas salidas
DPTO. DE AMTEMÁTICAS I.E.S. GALLICUM CURSO 2012/13
 DESARROLLO DE LAS UNIDADES DIDÁCTICAS MATEMÁTICAS II Según REAL DECRETO 1467/2007, de 2 de noviembre, por el que se establece la estructura del bachillerato y se fijan sus enseñanzas mínimas, estas son
DESARROLLO DE LAS UNIDADES DIDÁCTICAS MATEMÁTICAS II Según REAL DECRETO 1467/2007, de 2 de noviembre, por el que se establece la estructura del bachillerato y se fijan sus enseñanzas mínimas, estas son
Lugar Geométrico de las Raíces Herramienta para diseño de sistemas de control
 Herramienta para diseño de sistemas de Elizabeth Villota Cerna Curso: Ingeniería de Control (MT221) Facultad de Ingeniería Mecánica UNIFIM Mayo 2012 1 Control por realimentación, dónde? buques (nano) satélites
Herramienta para diseño de sistemas de Elizabeth Villota Cerna Curso: Ingeniería de Control (MT221) Facultad de Ingeniería Mecánica UNIFIM Mayo 2012 1 Control por realimentación, dónde? buques (nano) satélites
SISTEMAS DE CONTROL Fundamentos de modelado
 SISTEMAS DE CONTROL Fundamentos de modelado Se desarrollarán los modelos de sistemas continuos en el tiempo, eléctricos, mecánicos, electrónicos y electromecánicos, básicamente de tipo lineal, invariantes
SISTEMAS DE CONTROL Fundamentos de modelado Se desarrollarán los modelos de sistemas continuos en el tiempo, eléctricos, mecánicos, electrónicos y electromecánicos, básicamente de tipo lineal, invariantes
El amplificador operacional
 Tema 8 El amplificador operacional Índice 1. Introducción... 1 2. El amplificador diferencial... 2 3. El amplificador operacional... 4 3.1. Configuración inversora... 5 3.2. Configuración no inversora...
Tema 8 El amplificador operacional Índice 1. Introducción... 1 2. El amplificador diferencial... 2 3. El amplificador operacional... 4 3.1. Configuración inversora... 5 3.2. Configuración no inversora...
UNIDAD DIDÁCTICA I. Descripción y representación de los sistemas dinámicos. Métodos matemáticos
 4. o Regulación Automática (TE) (Código 10438 ) Seguidamente se estudia la estabilidad absoluta y relativa del sistema, su respuesta en régimen transitorio y su precisión en régimen permanente. Para el
4. o Regulación Automática (TE) (Código 10438 ) Seguidamente se estudia la estabilidad absoluta y relativa del sistema, su respuesta en régimen transitorio y su precisión en régimen permanente. Para el
Examen Ingeniería de Control 12/2014
 Examen Ingeniería de Control /04 Examen Ingeniería de Control /04 Examen Ingeniería de Control /04 Examen Ingeniería de Control /04 SOLUCIÓN EJERCICIO DE ESTADO:. (0.75 puntos) Proponer y justificar qué
Examen Ingeniería de Control /04 Examen Ingeniería de Control /04 Examen Ingeniería de Control /04 Examen Ingeniería de Control /04 SOLUCIÓN EJERCICIO DE ESTADO:. (0.75 puntos) Proponer y justificar qué
Línea de investigación o de trabajo: Electrónica de Potencia y Control Automático
 ASIGNATURA: TEORÍA DE SISTEMAS LINEALES Nombre de la asignatura: TEORÍA DE SISTEMAS LINEALES Línea de investigación o de trabajo: Electrónica de Potencia y Control Automático Tiempo de dedicación del estudiante
ASIGNATURA: TEORÍA DE SISTEMAS LINEALES Nombre de la asignatura: TEORÍA DE SISTEMAS LINEALES Línea de investigación o de trabajo: Electrónica de Potencia y Control Automático Tiempo de dedicación del estudiante
Circuitos de RF y las Comunicaciones Analógicas. Capítulo 3 Filtros en RF
 Capítulo 3 Filtros en RF 37 38 FILTROS EN RF Filtrado en RF: circuito que modifica la magnitud y la fase de las componentes de las frecuencias de la señal de RF que pasa a través de ellos. Un filtro de
Capítulo 3 Filtros en RF 37 38 FILTROS EN RF Filtrado en RF: circuito que modifica la magnitud y la fase de las componentes de las frecuencias de la señal de RF que pasa a través de ellos. Un filtro de
SISTEMAS DE CONTROL AUTOMÁTICO DEFINICIÓN_TIPOS_PARTES DIAGRAMA DE BLOQUES ESTABILIDAD
 SISTEMAS DE CONTROL AUTOMÁTICO DEFINICIÓN_TIPOS_PARTES DIAGRAMA DE BLOQUES ESTABILIDAD DEFINICIÓN Un Sistema de Control es un conjunto de elementos o componentes relacionados entre si que controlan alguna
SISTEMAS DE CONTROL AUTOMÁTICO DEFINICIÓN_TIPOS_PARTES DIAGRAMA DE BLOQUES ESTABILIDAD DEFINICIÓN Un Sistema de Control es un conjunto de elementos o componentes relacionados entre si que controlan alguna
Guía N 1 Introducción a las Matemáticas
 Glosario: Guía N 1 Introducción a las Matemáticas - Aritmética: Es la rama de las matemáticas que se dedica al estudio de los números y sus propiedades bajo las operaciones de suma, resta, multiplicación
Glosario: Guía N 1 Introducción a las Matemáticas - Aritmética: Es la rama de las matemáticas que se dedica al estudio de los números y sus propiedades bajo las operaciones de suma, resta, multiplicación
Tema 07: Acondicionamiento. M. en C. Edgardo Adrián Franco Martínez edgardoadrianfrancom
 Tema 07: Acondicionamiento M. en C. Edgardo Adrián Franco Martínez http://www.eafranco.com edfrancom@ipn.mx @edfrancom edgardoadrianfrancom 1 Contenido Acondicionamiento de una señal Caracterización del
Tema 07: Acondicionamiento M. en C. Edgardo Adrián Franco Martínez http://www.eafranco.com edfrancom@ipn.mx @edfrancom edgardoadrianfrancom 1 Contenido Acondicionamiento de una señal Caracterización del
INDICE Capítulo 1. Variables del Circuito Eléctrico Capítulo 2. Elementos de Circuitos Capítulo 3. Circuitos Resistivos
 INDICE Capítulo 1. Variables del Circuito Eléctrico 1 Introducción 1 1.1. Reto de diseño: Controlador de una válvula para tobera 2 1.2. Albores de la ciencia eléctrica 2 1.3. Circuitos eléctricos y flujo
INDICE Capítulo 1. Variables del Circuito Eléctrico 1 Introducción 1 1.1. Reto de diseño: Controlador de una válvula para tobera 2 1.2. Albores de la ciencia eléctrica 2 1.3. Circuitos eléctricos y flujo
Electrotecnia General (Prof. Dr. José Andrés Sancho Llerandi) Tema 14 CORRIENTES ALTERNAS
 Tema 14 CORRIENTES ALTERNAS") TEMA 14 CORRIENTES ALTERNAS 14.1. VALORES ASOCIADOS A LAS ONDAS SENOIDALES. Sea un cuadro rectangular de lados h y l, formado por N espiras devanadas en serie, que gira a velocidad angular constante ω
TEMA 14 CORRIENTES ALTERNAS 14.1. VALORES ASOCIADOS A LAS ONDAS SENOIDALES. Sea un cuadro rectangular de lados h y l, formado por N espiras devanadas en serie, que gira a velocidad angular constante ω