Orden de un sistema. El orden de un sistema está definido por el grado de su ecuación característica
|
|
|
- Agustín Vázquez Chávez
- hace 6 años
- Vistas:
Transcripción
1 ORDEN DE UN SISTEMA
2 Orden de un sistema El orden de un sistema está definido por el grado de su ecuación característica Normalmente la ecuación característica (denominador) de un sistema tiene mayor grado que el numerador de la F. T. El orden de un sistema está determinado por el número de polos que hay en su F. T.
3 Identifique el orden de los sistemas
4 Sistema de primer orden Sistema con un polo dominante 1/ = =
5 Sistema de Segundo orden Sistema con un par de polos dominantes = "no "(rad/s) ζ= (nepers/s) =
6 Sistema de Segundo orden Sistema con un par de polos dominantes
7 Sistema de Segundo orden Amortiguamiento critico frente a una entrada escalón unitario
8 Sistema de Segundo orden Sobreamortiguamiento frente a una entrada escalón unitario = ζ > = =[ + + ] ( ) = = = ( ) ( )
9 Sistema de Segundo orden Subamortiguamiento frente a una entrada escalón unitario = ζ < = [ + + ] = 1 cos + ( )
10 Sistema de Segundo orden Efecto de duplicar Sin modificar el valor de ζ = =45 = /4
11 Sistema de Segundo orden Se sabequede la ecuacionde arribala deribadase haracero para: Por lo cual y(t) presenta pendiente cero para:
12 Sistema de Segundo orden
13 Sistema de Segundo orden
14 Sistema de Segundo orden
15
16 Sistema con dos polos y un cero dominantes = "no "(rad/s) = ζ= (nepers/s) = >1 = <1

17 Sistema con dos polos y un cero dominantes caso sobre amortiguado >


18 Sistema con dos polos y un cero dominantes caso críticamente amortiguado 0.33 = =

19 Sistema con dos polos y un cero dominantes caso críticamente amortiguado 0.33 = =

20
21

22 Porcentaje de sobreelongacion y tiempo de asentamiento.
23 ERROR EN ESTADO ESTACIONARIO Cuando a un sistema sin excitar se le aplica repentinamente una entrada, un sistema bien diseñado proporcionara una rápida transición y a la vez suave desde el estado inicial a la respuesta forzada, existirá un tiempo en el que la salida del sistema no este asentada o estable, este tiempo corresponde a la respuesta natural del sistema, cuando la salida es estable le llamaremos respuesta forzada, y es ahí en donde podemos tener un error que idealmente debe de ser cero o casi cero, pero en muchas ocasiones dependiendo del tipo de sistema será imposible que el error sea cero para un tipo característico de entrada. Natural Natural Forzada Forzada
24 ERROR EN ESTADO ESTACIONARIO Cosiderese el sistema para controlar el ángulo de un telescopio para visualizar un objeto particular, se obtiene la operación deseada si el ángulo del telescopio se mantiene exactamente igual a la línea de vista del objeto Si la entrada esun escalónde valor 0.5 ( =0.5 ( )) Siendo el error inicial de 0.5 y el error en estado estacionario (cuando ) de 0.02, bien para este caso el error representa un 20% lo cual no es muy aceptable Existe una forma de calcular el valor del error en estado estacionario que es aplicando el teorema del valor final Aplicado al error lim ( )=lim 0, =0.02
25 ERROR EN ESTADO ESTACIONARIO Considérese que en el mismo sistema se cambia la función de transferencia de camino directo Si la entrada es un escalón de 0.5 ( =0.5 ( )) = ( +2 +4) lim ( )=lim ( +2 +4) =0
26 ERROR EN ESTADO ESTACIONARIO Considérese que en el mismo sistema se cambia la función de transferencia de camino directo Si la entrada es una rampa con pendiente de 0.1 ( =0.1 ( )) = ( +2 +4) lim ( )=lim ( +2 +4) =0.05
27 ERROR EN ESTADOESTACIONARIO En los ejemplos anteriores se observó que el sistema de primer orden fue capaz de seguir una entrada escalón, pero con un error constante en estado estacionario aproximadamente del 20% de la amplitud de la señal Mientras que este otro sistema logro un error cero frente a la misma entrada escalón, sin embargo al aplicarle una entrada rampa también presento un error en estado estacionario
28

29

30

31
32 Constantes de error y números de tipo El número de tipo se define por la cantidad de polos en el origen que tiene la función G(s) = + ( ) Se asume que N(s) y D(s) son polinomios con todas sus raíces distintas de cero, el número de tipo para el sistema mostrado es entonces igual a k, por lo tanto el número de tipo depende de las operaciones de integración (1/s) que aparecen en el camino directo de la función
33 Errores en estado estacionario con entradas polinomiales y constantes de posición, velocidad y aceleración s s s Estos errores se deben al teorema de L Hopitaly del valor final

34 En pocas palabras un sistema de tipo n+1 puede aceptar entradas polinomiales hasta de n-esimo grado y compensar con un error en estado estacionario de valor nulo, una entrada de grado n+1 produciría un error en estado estacionario constante, y una entrada polinomial de mayor grado produce un error no acotado, por lo tanto el sistema no puede seguir este tipo de entrada. Numero de tipo
35 EJEMPLOS DE APLICACIÓN 1. El siguiente modelo representa el control de uno de los ejes de un sistema de seguimiento óptico (se puede usar en antenas fotoreceptoras, lanzadores de misiles para interceptar aviones enemigos, antenas de embarcaciones de seguimiento de satélites, etc.), Suponer que el comportamiento de seguimiento deseado se obtiene sólo si el error angular en estado estacionario es menor o igual que 0,01 rad, la señal de entrada es =0.05 para obtener un grado deseado de estabilidad transitoria el sistema también debe presentar >0.6, determinar el rango de valores de para que esto se cumpla = 12 ( +10) = 12 ( +10) =lim = =1.2 = 1+ ( ) = 12 ( +10) ( +10) 10=2 ω =2 12 = 5 =
36 =1.2 = =0.05 ( ) lim =lim = <0.01 5< >5 1.2 >5 > > < > < > < 8.3 >4.16 < 8.3 /12 >4.167 < < <5.787

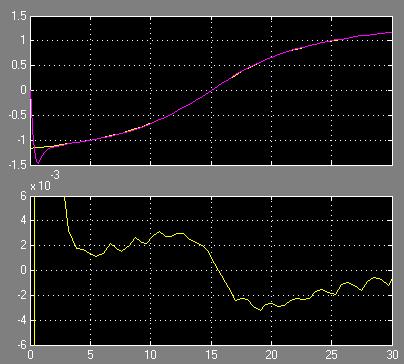
37 5 Supongase ahora que se escoge =5 Al verificar en simulink se observa que el error se encuentra entre y lo cual es menor que lo especificado, por otro lado el valor de >0.6garantiza que no se tenga un %OS menor al 10% por ser un sistema de segundo orden, el utilizar un valor de menor al rango determinado produciría que el error no sea menor al especificado, y por el contrario si se usa un valor mayor al rango se producirá un máximo sobreimpulso por encima del 10% presentando muchas oscilaciones.

38 =3, >0.01 =4, >0.01 =6,% >10% =6,% >10%
39 Ejercicio de Tarea Encuentreel rangode los valoresde para que el sistema tenga un error menor al y no exceda del 25% de sobre elongación, seleccione los valores límite y simule el comportamiento
40 Aumento del número de tipo Se puede pensar que si al sistema anterior se le podría realizar un aumento del número de tipo colocando otro integrador en el camino directo, sin embargo el sistema se volvería inestable debido a que la función de transferencia presentaría un coeficiente nulo en su ecuación característica. existe una manera de que esto se pueda cumplir y consiste en añadir un integrador en un camino paralelo a el controlador proporcional, a esto se le llama controlador PI

41 Analisis de la funcion de transferencia al aumentar el numero de tipo = ( ) ( ) = = ( ) ( ) = Como ya se explico estesistema es inestable ya que la ubicación de dos de los polos es siempre en el semiplano derecho de Laplace En la gráfica se incrementa juntamente desde 0 hasta infinito x x x

42 Analisis de la funcion de transferencia al aumentar el numero de tipo x x x o = ( ) ( ) ( ) = ( ) ( ) ( ) = ( ) Este sistema no puede considerarse inestable ya que el lugar de las raíces siempre está en el semiplano izquierdo de Laplace En la gráfica se incrementan juntamente desde 0 hasta infinito se observa que el cero no se mueve pero si se incrementaran en forma no proporcional el comportamiento sería diferente, una ganancia infinita cancelaria el cero con un polo x x xo
43 Ejemplo 2 Suponga que el sistema de seguimiento óptico trata de seguir un avión para derribarlo el sistema debe poder lanzar un misil con el mínimo error hacia el objetivo, la velocidad del avión es de 530m/s a una altura de 3400m, la posición de reposo del sistema es vertical como se muestra y el avión es detectado en t=0s

44 Obsérvese que el error máximo se obtiene justo cuando el avión pasa por encima del detector a los 15 segundos, es importante considerar que el valor de para este sistema es de 5 y se simulo en simulink con estos parametros Ejemplo2
45 Ejemplo 2 En este caso: Si la función de transferencia de Laplace que relaciona el error y la entrada se expande en serie de potencias como función de s entonces: Debido a que el valor de c2 es muy pequeño considerando el valor de K0 de 5 solo tomaremos el primer coeficiente diferente de cero = + + ( ) =
46

47 Ejemplo2
48 Tarea Encuentre por serie de potencias la línea punteada de la gráfica y realice la gráfica en un graficador como geogebra
49 Tarea Suponga que el sistema de seguimiento óptico trata de seguir un avión para derribarlo el sistema debe poder lanzar un misil con el mínimo error hacia el objetivo, la velocidad del avión es de 530(1+0.05t)m/s a una altura de 3000m, la posición de reposo del sistema es vertical como se muestra y el avión es detectado en t=0s A) Realice el análisis del error considerando los sistemas de abajo para los cuales =4.7y =5.2 B) Obtenga por series de potencias el error usando una serie de potencias truncada considerando el primer coeficiente diferente de cero y graficar en geogebra C) Realizar la simulación de ambos casos
50 Tarea Introducir las entradas sinusoidales a cada uno de los dos sistemas de abajo y determinar el error usando fasores, realizar la simulación, no considerar el error en el transitorio de la respuesta natural, revisar el ejemplo de la página 193 del libro de Paul H. Lewis. A) =5cos 10 B) 7sen 20 C) =6cos D) =[7 10 3cos 10 ]
51 Una técnica feedfodward Dada la función de transferencia que relaciona el error con la entrada si =1/ ( )es evidente que el numerador de dicha función se volvería cero, sin embargo no es un método muy usual ni practico realizarlo, pero se puede realizar una cancelación parcial para aumentar al número de tipo si por ejemplo =, es decir se utiliza una ganancia proporcional y un derivador en lugar de una función de transferencia reciproca de
52 Una técnica feedfodward En el siguiente ejemplo la función de transferencia y la relación de error con la entrada son: Si el valor de 4 = = + ( ) Se hace evidente el aumento del número de tipo ya que si no está presente o vale cero el sistema es de tipo 1, una buena sintonización de hará que el sistema pase a ser de tipo 2
53 Una técnica feedfodward La desventaja de esta técnica para aumentar el número de tipo radica en que es muy difícil sintonizar con exactitud el valor de para aumentar el número de tipo, sin embargo aunque no se logre hacer con exactitud producirá una gran disminución en el error en estado estacionario, y no alterara demasiado el carácter de la respuesta debido a que el orden del sistema permanece inalterado ya que la ecuación característica del sistema no se alterara, lo cual si ocurre al colocar un controlador PI en el camino directo para aumentar el número de tipo, se aumenta el número de tipo juntamente con la ecuación característica.

54 TAREA Utilizando la técnica feedfodwardy considerando que =5(sistema de la izquierda) modifique el sistema para que se vuelva de tipo 2, determinar el valor de y simular en simulinky medir el error para una entrada =0.05 ( ), simule usando un valor de 10% superior y 10% inferior, simular también el sistema de tipo 2 que esta abajo y diga cuál considera que es la mejor opción para aumentar el número de tipo.
1. Diseño de un compensador de adelanto de fase
 COMPENSADORES DE ADELANTO Y RETARDO 1 1. Diseño de un compensador de adelanto de fase El compensador de adelanto de fase persigue el aumento del margen de fase mediante la superposición de la curva de
COMPENSADORES DE ADELANTO Y RETARDO 1 1. Diseño de un compensador de adelanto de fase El compensador de adelanto de fase persigue el aumento del margen de fase mediante la superposición de la curva de
Representación en el espacio de estado. Sistemas Control Embebidos e Instrumentación Electrónica UNIVERSIDAD EAFIT
 Representación en el espacio de estado Representación en espacio de estado Control clásico El modelado y control de sistemas basado en la transformada de Laplace, es un enfoque muy sencillo y de fácil
Representación en el espacio de estado Representación en espacio de estado Control clásico El modelado y control de sistemas basado en la transformada de Laplace, es un enfoque muy sencillo y de fácil
Respuesta transitoria
 Capítulo 4 Respuesta transitoria Una ves que los diagramas a bloques son desarrollados, el siguiente paso es llevar a cabo el análisis de los sistemas. Existen dos tipos de análisis: cuantitativo y cualitativo.
Capítulo 4 Respuesta transitoria Una ves que los diagramas a bloques son desarrollados, el siguiente paso es llevar a cabo el análisis de los sistemas. Existen dos tipos de análisis: cuantitativo y cualitativo.
TSTC. Dpt. Teoría de la Señal, Telemática y Comunicaciones. Robótica Industrial. Universidad de Granada
 Dpt. Teoría de la Señal, Telemática y Comunicaciones Robótica Industrial Universidad de Granada Tema 5: Análisis y Diseño de Sistemas de Control para Robots S.0 S.1 Introducción Sistemas Realimentados
Dpt. Teoría de la Señal, Telemática y Comunicaciones Robótica Industrial Universidad de Granada Tema 5: Análisis y Diseño de Sistemas de Control para Robots S.0 S.1 Introducción Sistemas Realimentados
Nombre: Carné Ordinal. Parte I preguntas (1 punto c/u) Escriba la respuesta en el espacio indicado o encierre en un círculo la respuesta correcta:
 Escriba la respuesta en el espacio indicado o encierre en un círculo la respuesta correcta:") INSTITUTO TECNOLÓGICO DE COSTA RICA II SEMESTRE 2013 ESCUELA DE INGENIERIA EN ELECTRÓNICA CURSO: EL-5408 CONTROL AUTOMÁTICO MEDIO: Examen 3 PROF: ING. EDUARDO INTERIANO Nombre: Carné Ordinal Parte I preguntas
INSTITUTO TECNOLÓGICO DE COSTA RICA II SEMESTRE 2013 ESCUELA DE INGENIERIA EN ELECTRÓNICA CURSO: EL-5408 CONTROL AUTOMÁTICO MEDIO: Examen 3 PROF: ING. EDUARDO INTERIANO Nombre: Carné Ordinal Parte I preguntas
Retardo de transporte
 Retardo de transporte Escalón Escalón con retardo de transporte T Retardo de Transporte. Ejemplo de un Tiristor Tiempo Muerto Ángulo de Disparo (desde controlador) Pulso de disparo Nuevo Pulso de disparo
Retardo de transporte Escalón Escalón con retardo de transporte T Retardo de Transporte. Ejemplo de un Tiristor Tiempo Muerto Ángulo de Disparo (desde controlador) Pulso de disparo Nuevo Pulso de disparo
Técnicas Avanzadas de Control Memoria de ejercicios
 Memoria de ejercicios Curso: 2007/08 Titulación: Ingeniero Técnico Industrial Especialidad: Electrónica Industrial Alumno: Adolfo Hilario Tutor: Adolfo Hilario Caballero Índice general Presentación. 2..
Memoria de ejercicios Curso: 2007/08 Titulación: Ingeniero Técnico Industrial Especialidad: Electrónica Industrial Alumno: Adolfo Hilario Tutor: Adolfo Hilario Caballero Índice general Presentación. 2..
V B. g (1) V B ) g, (2) +ρ B. =( m H. m H (3) ρ 1. ρ B. Aplicando al aire la ecuación de estado de los gases perfectos, en la forma.
 V B ) g, (2) +ρ B. =( m H. m H (3) ρ 1. ρ B. Aplicando al aire la ecuación de estado de los gases perfectos, en la forma.") Un globo de aire caliente de volumen =, m 3 está abierto por su parte inferior. La masa de la envoltura es =,87 kg y el volumen de la misma se considera despreciable. La temperatura inicial del aire es
Un globo de aire caliente de volumen =, m 3 está abierto por su parte inferior. La masa de la envoltura es =,87 kg y el volumen de la misma se considera despreciable. La temperatura inicial del aire es
Práctica 2. Introducción a la simulación de sistemas mediante Simulink. Sistemas de primer, segundo y tercer orden. Objetivo
 Práctica 2 Introducción a la simulación de sistemas mediante Simulink. Sistemas de primer, segundo y tercer orden. Objetivo En esta práctica se pretende que el alumno tome contacto con una herramienta
Práctica 2 Introducción a la simulación de sistemas mediante Simulink. Sistemas de primer, segundo y tercer orden. Objetivo En esta práctica se pretende que el alumno tome contacto con una herramienta
Transformada de Laplace: Aplicación a vibraciones mecánicas
 Transformada de Laplace: Aplicación a vibraciones mecánicas Santiago Gómez Jorge Estudiante de Ingeniería Electrónica Universidad Nacional del Sur, Avda. Alem 1253, B8000CPB Bahía Blanca, Argentina thegrimreaper7@gmail.com
Transformada de Laplace: Aplicación a vibraciones mecánicas Santiago Gómez Jorge Estudiante de Ingeniería Electrónica Universidad Nacional del Sur, Avda. Alem 1253, B8000CPB Bahía Blanca, Argentina thegrimreaper7@gmail.com
Manual de la Práctica 5: Diseño de un controlador digital
 Control por Computador Manual de la Práctica 5: Diseño de un controlador digital Jorge Pomares Baeza Francisco Andrés Candelas Herías Grupo de Innovación Educativa en Automática 009 GITE IEA - 1 - Introducción
Control por Computador Manual de la Práctica 5: Diseño de un controlador digital Jorge Pomares Baeza Francisco Andrés Candelas Herías Grupo de Innovación Educativa en Automática 009 GITE IEA - 1 - Introducción
Esta expresión posee un polo doble en s=0 y dos polos simples en s= 1 y en s= 2.
 Antitransformada de Laplace (Transformada Inversa de Laplace) Utilizamos la transformada de Laplace para trabajar con modelos algebraicos en los bloques en lugar de modelos en Ecs. Diferenciales que son
Antitransformada de Laplace (Transformada Inversa de Laplace) Utilizamos la transformada de Laplace para trabajar con modelos algebraicos en los bloques en lugar de modelos en Ecs. Diferenciales que son
PROBLEMAS RESUELTOS MOVIMIENTO ONDULATORIO
 PROBLEMAS RESUELTOS MOVIMIENTO ONDULATORIO 1. Una onda transversal se propaga en una cuerda según la ecuación (unidades en el S.I.) Calcular la velocidad de propagación de la onda y el estado de vibración
PROBLEMAS RESUELTOS MOVIMIENTO ONDULATORIO 1. Una onda transversal se propaga en una cuerda según la ecuación (unidades en el S.I.) Calcular la velocidad de propagación de la onda y el estado de vibración
1 Análisis de la Respuesta Temporal
 Análisis de la Respuesta Temporal El estudio de la respuesta temporal de un sistema es de vital importancia para el posterior análisis de su comportamiento y el posible diseño de un sistema de control.
Análisis de la Respuesta Temporal El estudio de la respuesta temporal de un sistema es de vital importancia para el posterior análisis de su comportamiento y el posible diseño de un sistema de control.
Circuitos de RF y las Comunicaciones Analógicas. Capítulo II: Circuitos resonantes y Redes de acople
 Capítulo II: Circuitos resonantes y Redes de acople 21 22 2. Circuitos Resonantes y Redes de Acople En este capítulo se estudiaran los circuitos resonantes desde el punto de vista del factor de calidad
Capítulo II: Circuitos resonantes y Redes de acople 21 22 2. Circuitos Resonantes y Redes de Acople En este capítulo se estudiaran los circuitos resonantes desde el punto de vista del factor de calidad
Tema 2.5: Análisis basado en el método del Lugar de las Raíces
 Tema 2.5: Análisis basado en el método del Lugar de las Raíces 1. Lugar de las Raíces 2. Trazado de la gráfica 3. Lugar de las raíces generalizado 4. Diseño de controladores 1. El lugar de las raíces Objetivo:
Tema 2.5: Análisis basado en el método del Lugar de las Raíces 1. Lugar de las Raíces 2. Trazado de la gráfica 3. Lugar de las raíces generalizado 4. Diseño de controladores 1. El lugar de las raíces Objetivo:
CONTINUIDAD DE FUNCIONES. SECCIONES A. Definición de función continua. B. Propiedades de las funciones continuas. C. Ejercicios propuestos.
 CAPÍTULO IV. CONTINUIDAD DE FUNCIONES SECCIONES A. Definición de función continua. B. Propiedades de las funciones continuas. C. Ejercicios propuestos. 121 A. DEFINICIÓN DE FUNCIÓN CONTINUA. Una función
CAPÍTULO IV. CONTINUIDAD DE FUNCIONES SECCIONES A. Definición de función continua. B. Propiedades de las funciones continuas. C. Ejercicios propuestos. 121 A. DEFINICIÓN DE FUNCIÓN CONTINUA. Una función
Sistemas Control Embebidos e Instrumentación Electrónica UNIVERSIDAD EAFIT Semestre 2010/2 2009/2
 DIAGRAMA DE NYQUIST Semestre 2010/2 La respuesta en frecuencia se basa en la respuesta en estado estacionario de un sistema ante una entrada senoidal. Un sistema lineal invariante en el tiempo, si es afectado
DIAGRAMA DE NYQUIST Semestre 2010/2 La respuesta en frecuencia se basa en la respuesta en estado estacionario de un sistema ante una entrada senoidal. Un sistema lineal invariante en el tiempo, si es afectado
Funciones Racionales y Asíntotas
 y Asíntotas Carlos A. Rivera-Morales Precálculo 2 y Asíntotas Tabla de Contenido 1 Asíntotas de :Asíntotas Asíntotas Verticales y Asíntotas Horizontales y Asíntotas Asíntotas de :Asíntotas Definición:
y Asíntotas Carlos A. Rivera-Morales Precálculo 2 y Asíntotas Tabla de Contenido 1 Asíntotas de :Asíntotas Asíntotas Verticales y Asíntotas Horizontales y Asíntotas Asíntotas de :Asíntotas Definición:
PENDIENTE MEDIDA DE LA INCLINACIÓN 2.1.2 2.1.4
 PENDIENTE MEDIDA DE LA INCLINACIÓN 2.1.2 2.1.4 Los alumnos utilizaron la ecuación = m + b para graficar rectas describir patrones en los cursos anteriores. La Lección 2.1.1 es un repaso. Cuando la ecuación
PENDIENTE MEDIDA DE LA INCLINACIÓN 2.1.2 2.1.4 Los alumnos utilizaron la ecuación = m + b para graficar rectas describir patrones en los cursos anteriores. La Lección 2.1.1 es un repaso. Cuando la ecuación
Transformada de Laplace - Conceptos Básicos. e -st f(t)dt. L { f (t) } = F(s) =
dt. L { f (t) } = F(s) =") Transformada de Laplace - Conceptos Básicos Definición: Sea f (t) una función de t definida para t > 0. La Transformada de Laplace de f(t) se define como: L { f (t) } = F(s) = 0 e -st f(t)dt Algunas Propiedades
Transformada de Laplace - Conceptos Básicos Definición: Sea f (t) una función de t definida para t > 0. La Transformada de Laplace de f(t) se define como: L { f (t) } = F(s) = 0 e -st f(t)dt Algunas Propiedades
Estudio Temporal de Sistemas Continuos de 1 er y 2º Orden
 niversidad Carlos III de Madrid Departamento de Ingeniería de Sistemas y Automática SEÑALES Y SISTEMAS Práctica 1 Estudio Temporal de Sistemas Continuos de 1 er y 2º Orden 1 Introducción Teórica Se denomina
niversidad Carlos III de Madrid Departamento de Ingeniería de Sistemas y Automática SEÑALES Y SISTEMAS Práctica 1 Estudio Temporal de Sistemas Continuos de 1 er y 2º Orden 1 Introducción Teórica Se denomina
Vectores y rectas. 4º curso de E.S.O., opción B. Modelo de examen (ficticio)
") demattematicaswordpresscom Vectores y rectas º curso de ESO, opción B Modelo de examen (ficticio) Sean los vectores u = (,5) y v = (, ) a) Analiza si tienen la misma dirección No tienen la misma dirección
demattematicaswordpresscom Vectores y rectas º curso de ESO, opción B Modelo de examen (ficticio) Sean los vectores u = (,5) y v = (, ) a) Analiza si tienen la misma dirección No tienen la misma dirección
Modelización por medio de sistemas
 SISTEMAS DE ECUACIONES DIFERENCIALES LINEALES. Modelización por medio de sistemas d y dy Ecuaciones autónomas de segundo orden: = f ( y, ) Una variable independiente. Una variable dependiente. La variable
SISTEMAS DE ECUACIONES DIFERENCIALES LINEALES. Modelización por medio de sistemas d y dy Ecuaciones autónomas de segundo orden: = f ( y, ) Una variable independiente. Una variable dependiente. La variable
SESIÓN 6 INTERPRETACION GEOMETRICA DE LA DERIVADA, REGLA GENERAL PARA DERIVACIÓN, REGLAS PARA DERIVAR FUNCIONES ALGEBRAICAS.
 SESIÓN 6 INTERPRETACION GEOMETRICA DE LA DERIVADA, REGLA GENERAL PARA DERIVACIÓN, REGLAS PARA DERIVAR FUNCIONES ALGEBRAICAS. I. CONTENIDOS: 1. Interpretación geométrica de la derivada 2. Regla general
SESIÓN 6 INTERPRETACION GEOMETRICA DE LA DERIVADA, REGLA GENERAL PARA DERIVACIÓN, REGLAS PARA DERIVAR FUNCIONES ALGEBRAICAS. I. CONTENIDOS: 1. Interpretación geométrica de la derivada 2. Regla general
UNIDAD 4: FUNCIONES POLINOMIALES Y RACIONALES
 UNIDAD 4: FUNCIONES POLINOMIALES Y RACIONALES En la Sección anterior se abordó contenidos relacionados con las funciones y gráficas, continuamos aprendiendo más sobre funciones; en la presente unidad abordaremos
UNIDAD 4: FUNCIONES POLINOMIALES Y RACIONALES En la Sección anterior se abordó contenidos relacionados con las funciones y gráficas, continuamos aprendiendo más sobre funciones; en la presente unidad abordaremos
18. DOMINIO FRECUENCIA CRITERIO DE NYQUIST
 18. DOMINIO FRECUENCIA CRITERIO DE NYQUIST 18.1. DIAGRAMAS POLARES En análisis dinámico de sistemas en el dominio de la frecuencia, además de emplearse los diagramas y el criterio de Bode, se utilizan
18. DOMINIO FRECUENCIA CRITERIO DE NYQUIST 18.1. DIAGRAMAS POLARES En análisis dinámico de sistemas en el dominio de la frecuencia, además de emplearse los diagramas y el criterio de Bode, se utilizan
Precálculo 1 - Ejercicios de Práctica. 1. La pendiente de la línea (o recta) que pasa por los puntos P(2, -1) y Q(0, 3) es:
 que pasa por los puntos P(2, -1) y Q(0, 3) es:") Precálculo 1 - Ejercicios de Práctica 1. La pendiente de la línea (o recta) que pasa por los puntos P(2, -1) y Q(0, 3) es: a. 2 b. 1 c. 0 d. 1 2. La ecuación de la línea (recta) con pendiente 2/5 e intercepto
Precálculo 1 - Ejercicios de Práctica 1. La pendiente de la línea (o recta) que pasa por los puntos P(2, -1) y Q(0, 3) es: a. 2 b. 1 c. 0 d. 1 2. La ecuación de la línea (recta) con pendiente 2/5 e intercepto
Algebra Lineal XXVI: La Regla de Cramer.
 Algebra Lineal XXVI: La Regla de Cramer José María Rico Martínez Departamento de Ingeniería Mecánica Facultad de Ingeniería Mecánica Eléctrica y Electrónica Universidad de Guanajuato email: jrico@salamancaugtomx
Algebra Lineal XXVI: La Regla de Cramer José María Rico Martínez Departamento de Ingeniería Mecánica Facultad de Ingeniería Mecánica Eléctrica y Electrónica Universidad de Guanajuato email: jrico@salamancaugtomx
Movimiento Armónico Simple
 Movimiento Armónico Simple Ejercicio 1 Una partícula vibra con una frecuencia de 30Hz y una amplitud de 5,0 cm. Calcula la velocidad máxima y la aceleración máxima con que se mueve. En primer lugar atenderemos
Movimiento Armónico Simple Ejercicio 1 Una partícula vibra con una frecuencia de 30Hz y una amplitud de 5,0 cm. Calcula la velocidad máxima y la aceleración máxima con que se mueve. En primer lugar atenderemos
TUTORIAL BÁSICO DE MECÁNICA FLUIDOS
 TUTORIAL BÁSICO DE MECÁNICA FLUIDOS El tutorial es básico pues como habréis visto en muchos de ellos es haceros entender no sólo la aplicación práctica de cada teoría sino su propia existencia y justificación.
TUTORIAL BÁSICO DE MECÁNICA FLUIDOS El tutorial es básico pues como habréis visto en muchos de ellos es haceros entender no sólo la aplicación práctica de cada teoría sino su propia existencia y justificación.
Práctica 4 Control de posición y velocidad de un motor de corriente continua
 Práctica 4 Control de posición y velocidad de un motor de corriente continua Maqueta de control de posición y velocidad Practicas de Regulación Automática Maqueta de control de posición y velocidad Caja
Práctica 4 Control de posición y velocidad de un motor de corriente continua Maqueta de control de posición y velocidad Practicas de Regulación Automática Maqueta de control de posición y velocidad Caja
Unidad 3: Razones trigonométricas.
 Unidad 3: Razones trigonométricas 1 Unidad 3: Razones trigonométricas. 1.- Medida de ángulos: grados y radianes. Las unidades de medida de ángulos más usuales son el grado sexagesimal y el radián. Se define
Unidad 3: Razones trigonométricas 1 Unidad 3: Razones trigonométricas. 1.- Medida de ángulos: grados y radianes. Las unidades de medida de ángulos más usuales son el grado sexagesimal y el radián. Se define
Coordinación de Matemática I (MAT021) 1 er Semestre de 2013 Semana 7: Lunes 22 - Viernes 27 de Abril. Contenidos
 1 er Semestre de 2013 Semana 7: Lunes 22 - Viernes 27 de Abril. Contenidos") Coordinación de Matemática I (MAT01) 1 er Semestre de 013 Semana 7: Lunes - Viernes 7 de Abril Cálculo Contenidos Clase 1: Álgebra de límites. Teorema del Sandwich. Cálculo de límites. Límites trigonométricos.
Coordinación de Matemática I (MAT01) 1 er Semestre de 013 Semana 7: Lunes - Viernes 7 de Abril Cálculo Contenidos Clase 1: Álgebra de límites. Teorema del Sandwich. Cálculo de límites. Límites trigonométricos.
CURSO: CONTROL AUTOMATICO PROFESOR: MSC. CESAR LOPEZ AGUILAR
 SEMANA 10 CURSO: CONTROL AUTOMATICO PROFESOR: MSC. CESAR LOPEZ AGUILAR TRANSFORMADA DE LA PLACE I. OBJETIVO Solucionar ecuaciones diferenciales mediante la transformada de la place. III. BIBLIOGRAFIA W.
SEMANA 10 CURSO: CONTROL AUTOMATICO PROFESOR: MSC. CESAR LOPEZ AGUILAR TRANSFORMADA DE LA PLACE I. OBJETIVO Solucionar ecuaciones diferenciales mediante la transformada de la place. III. BIBLIOGRAFIA W.
DERIVADAS. Para hallar la pendiente de una curva en algún punto hacemos uso de la recta tangente de una curva en un punto.
 DERIVADAS Tema: La derivada como pendiente de una curva Para hallar la pendiente de una curva en algún punto hacemos uso de la recta tangente de una curva en un punto. La pendiente de la curva en el punto
DERIVADAS Tema: La derivada como pendiente de una curva Para hallar la pendiente de una curva en algún punto hacemos uso de la recta tangente de una curva en un punto. La pendiente de la curva en el punto
Unidad V. 5.1 Recta tangente y recta normal a una curva en un punto. Curvas ortogonales.
 Unidad V Aplicaciones de la derivada 5.1 Recta tangente y recta normal a una curva en un punto. Curvas ortogonales. Una tangente a una curva es una recta que toca la curva en un solo punto y tiene la misma
Unidad V Aplicaciones de la derivada 5.1 Recta tangente y recta normal a una curva en un punto. Curvas ortogonales. Una tangente a una curva es una recta que toca la curva en un solo punto y tiene la misma
CAPÍTULO. Análisis del Desempeño del Controlador GPI. IV. Análisis del Desempeño del Controlador GPI
 CAPÍTULO IV Análisis del Desempeño del Controlador GPI El interés de este capítulo radica en la compensación del voltaje de cd en presencia de perturbaciones. Este problema se presenta en aplicaciones
CAPÍTULO IV Análisis del Desempeño del Controlador GPI El interés de este capítulo radica en la compensación del voltaje de cd en presencia de perturbaciones. Este problema se presenta en aplicaciones
PENDIENTE MEDIDA DE LA INCLINACIÓN
 Capítulo 2 PENDIENTE MEDIDA DE LA INCLINACIÓN 2.1.2 2.1.4 Los alumnos utilizaron la ecuación = m + b para graficar rectas describir patrones en los cursos anteriores. La Lección 2.1.1 es un repaso. Cuando
Capítulo 2 PENDIENTE MEDIDA DE LA INCLINACIÓN 2.1.2 2.1.4 Los alumnos utilizaron la ecuación = m + b para graficar rectas describir patrones en los cursos anteriores. La Lección 2.1.1 es un repaso. Cuando
Aplicación: cálculo de áreas XII APLICACIÓN: CÁLCULO DE ÁREAS
 XII APLICACIÓN: CÁLCULO DE ÁREAS El estudiante, hasta este momento de sus estudios, está familiarizado con el cálculo de áreas de figuras geométricas regulares a través del uso de fórmulas, como el cuadrado,
XII APLICACIÓN: CÁLCULO DE ÁREAS El estudiante, hasta este momento de sus estudios, está familiarizado con el cálculo de áreas de figuras geométricas regulares a través del uso de fórmulas, como el cuadrado,
INTRODUCCION A SIMULINK
 INTRODUCCION A SIMULINK Matlab (Matrix Laboratory) es un sistema basado en matrices para realizar cálculos matemáticos y de ingeniería. Entre las múltiples herramientas que presenta este programa se encuentra
INTRODUCCION A SIMULINK Matlab (Matrix Laboratory) es un sistema basado en matrices para realizar cálculos matemáticos y de ingeniería. Entre las múltiples herramientas que presenta este programa se encuentra
19. DISEÑO DE CONTROLADORES
 381 19. DISEÑO DE CONTROLADORES 19.1. INTRODUCCION Con los diagramas de Bode de la respuesta de un lazo abierto se pueden diseñar controladores con las especificaciones del margen de ganancia, el margen
381 19. DISEÑO DE CONTROLADORES 19.1. INTRODUCCION Con los diagramas de Bode de la respuesta de un lazo abierto se pueden diseñar controladores con las especificaciones del margen de ganancia, el margen
CINEMÁTICA: ESTUDIO DEL MOVIMIENTO. Cinemática es la parte de la Física que estudia la descripción del movimiento de los cuerpos.
 CINEMÁTICA: ESTUDIO DEL MOVIMIENTO Cinemática es la parte de la Física que estudia la descripción del movimiento de los cuerpos. 1. Cuándo un cuerpo está en movimiento? Para hablar de reposo o movimiento
CINEMÁTICA: ESTUDIO DEL MOVIMIENTO Cinemática es la parte de la Física que estudia la descripción del movimiento de los cuerpos. 1. Cuándo un cuerpo está en movimiento? Para hablar de reposo o movimiento
La Hoja de Cálculo en la resolución de problemas de Física.
 a Hoja de Cálculo en la resolución de problemas de Física. Jesús Ruiz Felipe. Profesor de Física y Química del ES Cristóbal Pérez Pastor de Tobarra (Albacete) CEP de Albacete.jesusruiz@sociedadelainformacion.com
a Hoja de Cálculo en la resolución de problemas de Física. Jesús Ruiz Felipe. Profesor de Física y Química del ES Cristóbal Pérez Pastor de Tobarra (Albacete) CEP de Albacete.jesusruiz@sociedadelainformacion.com
Estudio de funciones mediante límites y derivadas
 Estudio de funciones mediante límites y derivadas CVS0. El precio del billete de una línea de autobús se obtiene sumando dos cantidades, una fija y otra proporcional a los kilómetros recorridos. Por un
Estudio de funciones mediante límites y derivadas CVS0. El precio del billete de una línea de autobús se obtiene sumando dos cantidades, una fija y otra proporcional a los kilómetros recorridos. Por un
Infinito más un número Infinito más infinito. Infinito por infinito. OPERACIONES CON INFINITO Sumas con infinito. Productos con infinito
 OPERACIONES CON INFINITO Sumas con infinito Infinito más un número Infinito más infinito Infinito menos infinito Productos con infinito Infinito por un número Infinito por infinito Infinito por cero Cocientes
OPERACIONES CON INFINITO Sumas con infinito Infinito más un número Infinito más infinito Infinito menos infinito Productos con infinito Infinito por un número Infinito por infinito Infinito por cero Cocientes
Electrónica 2. Práctico 3 Alta Frecuencia
 Electrónica 2 Práctico 3 Alta Frecuencia Los ejercicios marcados con son opcionales. Además cada ejercicio puede tener un número, que indica el número de ejercicio del libro del curso (Microelectronic
Electrónica 2 Práctico 3 Alta Frecuencia Los ejercicios marcados con son opcionales. Además cada ejercicio puede tener un número, que indica el número de ejercicio del libro del curso (Microelectronic
Trabajo Práctico n 2. Robotización de un Puente Grúa. Presentación. Restricciones. Curso 2011
 Trabajo Práctico n 2 Robotización de un Puente Grúa Presentación Este problema consiste en desarrollar un sistema de control automático que permita robotizar la operación de un puente grúa para la carga
Trabajo Práctico n 2 Robotización de un Puente Grúa Presentación Este problema consiste en desarrollar un sistema de control automático que permita robotizar la operación de un puente grúa para la carga
I. Determinar los siguientes límites, aplicando las propiedades. lim =
 Ejercicios resueltos I. Determinar los siguientes límites, aplicando las propiedades ) 3 + 2 4 3 + 2 4 = (2) 3 + 2 (2) 2 - (2) - 4 Sustituir la por el 2 = 8 + 8-2 - 4 = 0 Aplicar límite a cada término
Ejercicios resueltos I. Determinar los siguientes límites, aplicando las propiedades ) 3 + 2 4 3 + 2 4 = (2) 3 + 2 (2) 2 - (2) - 4 Sustituir la por el 2 = 8 + 8-2 - 4 = 0 Aplicar límite a cada término
AYUDAS SOBRE LA LINEA RECTA
 AYUDAS SOBRE LA LINEA RECTA AYUDA : Grafiquemos la función Solución: Se debe escoger algunos números que representan a la variable x, para obtener el valor de la variable y respectivamente así: El proceso:
AYUDAS SOBRE LA LINEA RECTA AYUDA : Grafiquemos la función Solución: Se debe escoger algunos números que representan a la variable x, para obtener el valor de la variable y respectivamente así: El proceso:
PNF en Mecánica Vibraciones Mecánicas Prof. Charles Delgado
 Vibraciones en máquinas LOS MOVIMIENTOS VIBRATORIOS en máquinas se presentan cuando sobre las partes elásticas actúan fuerzas variables. Generalmente, estos movimientos son indeseables, aun cuando en algunos
Vibraciones en máquinas LOS MOVIMIENTOS VIBRATORIOS en máquinas se presentan cuando sobre las partes elásticas actúan fuerzas variables. Generalmente, estos movimientos son indeseables, aun cuando en algunos
8.4. CRITERIO DE ESTABILIDAD POR EL METODO DIRECTO DE LIAPUNOV
 8.4. CRITERIO DE ESTAB.: METODO DE LIAPUNOV 309 8.4. CRITERIO DE ESTABILIDAD POR EL METODO DIRECTO DE LIAPUNOV Consideremos el sistema autónomo dx = F (x, y) dt (8.32) dt = G(x, y), y supongamos que tiene
8.4. CRITERIO DE ESTAB.: METODO DE LIAPUNOV 309 8.4. CRITERIO DE ESTABILIDAD POR EL METODO DIRECTO DE LIAPUNOV Consideremos el sistema autónomo dx = F (x, y) dt (8.32) dt = G(x, y), y supongamos que tiene
Derivada. 1. Pendiente de la recta tangente a una curva
 Nivelación de Matemática MTHA UNLP Derivada Pendiente de la recta tangente a una curva Definiciones básicas Dada una curva que es la gráfica de una función y = f() y sea P un punto sobre la curva La pendiente
Nivelación de Matemática MTHA UNLP Derivada Pendiente de la recta tangente a una curva Definiciones básicas Dada una curva que es la gráfica de una función y = f() y sea P un punto sobre la curva La pendiente
Ecuaciones Lineales en Dos Variables
 Ecuaciones Lineales en Dos Variables Una ecuación lineal en dos variables tiene la forma general a + b + c = 0; donde a, b, c representan números reales las tres no pueden ser iguales a cero a la misma
Ecuaciones Lineales en Dos Variables Una ecuación lineal en dos variables tiene la forma general a + b + c = 0; donde a, b, c representan números reales las tres no pueden ser iguales a cero a la misma
TEORÍA DE LA CONDUCTA DEL CONSUMIDOR Y DE LA DEMANDA
 S_A._LECV TEORÍA DE LA CONDUCTA DEL CONSUMIDOR DE LA DEMANDA LA FUNCIÓN DE PREFERENCIA Todos los individuos tratan de alcanzar la satisfacción con un ingreso limitado. Este esfuerzo más o menos consciente,
S_A._LECV TEORÍA DE LA CONDUCTA DEL CONSUMIDOR DE LA DEMANDA LA FUNCIÓN DE PREFERENCIA Todos los individuos tratan de alcanzar la satisfacción con un ingreso limitado. Este esfuerzo más o menos consciente,
Fabio Prieto Ingreso 2003
 Fabio Prieto Ingreso 00. INECUACIONES CON UNA VARIABLE.. Inecuación lineal Llamaremos desigualdad lineal de una variable a cualquier epresión de la forma: a + b > 0 o bien a + b < 0 o bien a + b 0 o bien
Fabio Prieto Ingreso 00. INECUACIONES CON UNA VARIABLE.. Inecuación lineal Llamaremos desigualdad lineal de una variable a cualquier epresión de la forma: a + b > 0 o bien a + b < 0 o bien a + b 0 o bien
Límite de una función
 Límite de una función El límite de la función f(x) en el punto x 0, es el valor al que se acercan las imágenes (las y) cuando los originales (las x) se acercan al valor x 0. Es decir el valor al que tienden
Límite de una función El límite de la función f(x) en el punto x 0, es el valor al que se acercan las imágenes (las y) cuando los originales (las x) se acercan al valor x 0. Es decir el valor al que tienden
Controlador PID con anti-windup
 Laboratorio de Control de Procesos Industriales Práctica 1 Controlador PID con anti-windup 1 de noviembre de 2008 Introducción 2 INTRODUCCIÓN REGULADORES PID La idea básica del controlador PID es simple
Laboratorio de Control de Procesos Industriales Práctica 1 Controlador PID con anti-windup 1 de noviembre de 2008 Introducción 2 INTRODUCCIÓN REGULADORES PID La idea básica del controlador PID es simple
= 1. x = 3: Lím = Asíntota vertical en x = 3: = 0 ; No se anula nunca. Punto de corte con OY es (0, 3) 3 x
 3 x") Modelo 4. Problema A.- (Calificación máima: puntos) 4 si Se considera la función real de variable real f ( ) si > a) Determínense las asíntotas de la función y los puntos de corte con los ejes. a. Asíntotas
Modelo 4. Problema A.- (Calificación máima: puntos) 4 si Se considera la función real de variable real f ( ) si > a) Determínense las asíntotas de la función y los puntos de corte con los ejes. a. Asíntotas
CONTROL DE PROCESOS QUÍMICOS
 UNIVERSIDAD NACIONAL EXPERIMENTAL POLITECNICA ANTONIO JOSÉ DE SUCRE VICERRECTORADO BARQUISIMETO DEPARTAMENTO DE INGENIERÍA QUÍMICA CONTROL DE PROCESOS QUÍMICOS Prof: Ing. (MSc). Juan Enrique Rodríguez
UNIVERSIDAD NACIONAL EXPERIMENTAL POLITECNICA ANTONIO JOSÉ DE SUCRE VICERRECTORADO BARQUISIMETO DEPARTAMENTO DE INGENIERÍA QUÍMICA CONTROL DE PROCESOS QUÍMICOS Prof: Ing. (MSc). Juan Enrique Rodríguez
Materia: Matemática de Octavo Tema: Raíces de un polinomio. Marco teórico
 Materia: Matemática de Octavo Tema: Raíces de un polinomio Y si tuvieras una ecuación polinómica como? Cómo podrías factorizar el polinomio para resolver la ecuación? Después de completar esta lección
Materia: Matemática de Octavo Tema: Raíces de un polinomio Y si tuvieras una ecuación polinómica como? Cómo podrías factorizar el polinomio para resolver la ecuación? Después de completar esta lección
MOVIMIENTO ARMÓNICO PREGUNTAS
 MOVIMIENTO ARMÓNICO PREGUNTAS 1. Qué ocurre con la energía mecánica del movimiento armónico amortiguado? 2. Marcar lo correspondiente: la energía de un sistema masa resorte es proporcional a : i. la amplitud
MOVIMIENTO ARMÓNICO PREGUNTAS 1. Qué ocurre con la energía mecánica del movimiento armónico amortiguado? 2. Marcar lo correspondiente: la energía de un sistema masa resorte es proporcional a : i. la amplitud
 Titulo: COMO GRAFICAR UNA FUNCION RACIONAL Año escolar: 4to. año de bachillerato Autor: José Luis Albornoz Salazar Ocupación: Ing Civil. Docente Universitario País de residencia: Venezuela Correo electrónico:
Titulo: COMO GRAFICAR UNA FUNCION RACIONAL Año escolar: 4to. año de bachillerato Autor: José Luis Albornoz Salazar Ocupación: Ing Civil. Docente Universitario País de residencia: Venezuela Correo electrónico:
Robótica 4. Control de robots F. Hugo Ramírez Leyva
 Robótica 4. Control de robots F. Hugo Ramírez Leyva Cubículo 3 Instituto de Electrónica y Mecatrónica hugo@mixteco.utm.mx Marzo 2012 Representación en Variables de estado Un sistema dinámico no lineal
Robótica 4. Control de robots F. Hugo Ramírez Leyva Cubículo 3 Instituto de Electrónica y Mecatrónica hugo@mixteco.utm.mx Marzo 2012 Representación en Variables de estado Un sistema dinámico no lineal
PAU Madrid. Matemáticas II. Año Examen modelo. Opción A. Ejercicio 1. Valor: 2 puntos.
 PAU Madrid. Matemáticas II. Año 22. Examen modelo. Opción A. Ejercicio 1. Valor: 2 puntos. Se considera una varilla AB de longitud 1. El extremo A de esta varilla recorre completamente la circunferencia
PAU Madrid. Matemáticas II. Año 22. Examen modelo. Opción A. Ejercicio 1. Valor: 2 puntos. Se considera una varilla AB de longitud 1. El extremo A de esta varilla recorre completamente la circunferencia
En la notación C(3) se indica el valor de la cuenta para 3 kilowatts-hora: C(3) = 60 (3) = 1.253
 se indica el valor de la cuenta para 3 kilowatts-hora: C(3) = 60 (3) = 1.253") Eje temático: Álgebra y funciones Contenidos: Operatoria con expresiones algebraicas Nivel: 2 Medio Funciones 1. Funciones En la vida diaria encontramos situaciones en las que aparecen valores que varían
Eje temático: Álgebra y funciones Contenidos: Operatoria con expresiones algebraicas Nivel: 2 Medio Funciones 1. Funciones En la vida diaria encontramos situaciones en las que aparecen valores que varían
Tema II: Análisis de circuitos mediante la transformada de Laplace
 Tema II: Análisis de circuitos mediante la transformada de Laplace La transformada de Laplace... 29 Concepto e interés práctico... 29 Definición... 30 Observaciones... 30 Transformadas de Laplace funcionales...
Tema II: Análisis de circuitos mediante la transformada de Laplace La transformada de Laplace... 29 Concepto e interés práctico... 29 Definición... 30 Observaciones... 30 Transformadas de Laplace funcionales...
Ingeniería. Instrumentos de Procesos Industriales. Instrumentos de medición de presión. Introducción
 Ingeniería Instrumentos de Procesos Industriales Instrumentos de medición de presión Introducción Junto con la temperatura, la presión es la variable más comúnmente medida en plantas de proceso. Su persistencia
Ingeniería Instrumentos de Procesos Industriales Instrumentos de medición de presión Introducción Junto con la temperatura, la presión es la variable más comúnmente medida en plantas de proceso. Su persistencia
MATEMÁTICAS APLICADAS A LAS C.C. SOCIALES
 MATEMÁTICAS APLICADAS A LAS C.C. SOCIALES CAPÍTULO 5 Curso preparatorio de la prueba de acceso a la universidad para mayores de 25 años curso 2010/11 Nuria Torrado Robles Departamento de Estadística Universidad
MATEMÁTICAS APLICADAS A LAS C.C. SOCIALES CAPÍTULO 5 Curso preparatorio de la prueba de acceso a la universidad para mayores de 25 años curso 2010/11 Nuria Torrado Robles Departamento de Estadística Universidad
Integrador, realimentación y control
 Prctica 1 Integrador, realimentación y control El programa Simulink es un programa incluido dentro de Matlab que sirve para realizar la integración numérica de ecuaciones diferenciales a efectos de simular
Prctica 1 Integrador, realimentación y control El programa Simulink es un programa incluido dentro de Matlab que sirve para realizar la integración numérica de ecuaciones diferenciales a efectos de simular
Razón de Cambio Promedio:
 NOTA: En este PDF encontrará los siguientes temas que debe estudiar para la clase: Aplicaciones de la Derivada a Funciones Económicas, Razón de Cambio Promedio, Razón de Cambio Instantánea, Razones Relacionadas,
NOTA: En este PDF encontrará los siguientes temas que debe estudiar para la clase: Aplicaciones de la Derivada a Funciones Económicas, Razón de Cambio Promedio, Razón de Cambio Instantánea, Razones Relacionadas,
INVERSORES RESONANTES
 3 INVERSORES RESONANTES 3.1 INTRODUCCIÓN Los convertidores de CD a CA se conocen como inversores. La función de un inversor es cambiar un voltaje de entrada en CD a un voltaje simétrico de salida en CA,
3 INVERSORES RESONANTES 3.1 INTRODUCCIÓN Los convertidores de CD a CA se conocen como inversores. La función de un inversor es cambiar un voltaje de entrada en CD a un voltaje simétrico de salida en CA,
Funciones 1. D = Dom ( f ) = x R / f(x) R. Recuerda como determinabas los dominios de algunas funciones: x x
 = x R / f(x) R. Recuerda como determinabas los dominios de algunas funciones: x x") Funciones. DEFINICIÓN Y TERMINOLOGÍA.. Definición de función real de variable real. "Es toda correspondencia, f, entre un subconjunto D de números reales y R (o una parte de R), con la condición de que
Funciones. DEFINICIÓN Y TERMINOLOGÍA.. Definición de función real de variable real. "Es toda correspondencia, f, entre un subconjunto D de números reales y R (o una parte de R), con la condición de que
Volumen de Sólidos de Revolución
 60 CAPÍTULO 4 Volumen de Sólidos de Revolución 6 Volumen de sólidos de revolución Cuando una región del plano de coordenadas gira alrededor de una recta l, se genera un cuerpo geométrico denominado sólido
60 CAPÍTULO 4 Volumen de Sólidos de Revolución 6 Volumen de sólidos de revolución Cuando una región del plano de coordenadas gira alrededor de una recta l, se genera un cuerpo geométrico denominado sólido
1) Considera la función f(x) = x2 + 1 para contestar las siguientes preguntas:
 Considera la función f(x) = x2 + 1 para contestar las siguientes preguntas:") LIMITE DE FUNCIONES Tema: Introducción a límite 1) Considera la función f(x) = x2 + 1 para contestar las siguientes preguntas: a) Cuál es el valor de la función si x = 2? b) Cuál es el valor de la función
LIMITE DE FUNCIONES Tema: Introducción a límite 1) Considera la función f(x) = x2 + 1 para contestar las siguientes preguntas: a) Cuál es el valor de la función si x = 2? b) Cuál es el valor de la función
Información importante
 Coordinación de Matemática I (MAT01) 1 er Semestre de 010 Semana 7: Lunes 3 viernes 7 de Mayo Información importante El proceso de apelación del primer certamen comienza esta semana. Los cuadernillos los
Coordinación de Matemática I (MAT01) 1 er Semestre de 010 Semana 7: Lunes 3 viernes 7 de Mayo Información importante El proceso de apelación del primer certamen comienza esta semana. Los cuadernillos los
Introducción. Flujo Eléctrico.
 Introducción La descripción cualitativa del campo eléctrico mediante las líneas de fuerza, está relacionada con una ecuación matemática llamada Ley de Gauss, que relaciona el campo eléctrico sobre una
Introducción La descripción cualitativa del campo eléctrico mediante las líneas de fuerza, está relacionada con una ecuación matemática llamada Ley de Gauss, que relaciona el campo eléctrico sobre una
Definimos un sistema con un tiempo muerto de 0.3s y lo discretizamos con T = 0.1s. Step Response. 0 1 2 3 4 5 6 7 8 9 10 Time (sec)
") Ejemplo de Predictor de Smith El predictor de Smith es un tipo de compensador que permite lidiar con sistemas con tiempo muerto. Una de las características negativas de los sistemas con tiempo muerto es
Ejemplo de Predictor de Smith El predictor de Smith es un tipo de compensador que permite lidiar con sistemas con tiempo muerto. Una de las características negativas de los sistemas con tiempo muerto es
Formatos para prácticas de laboratorio
 CARRERA PLAN DE ESTUDIO CLAVE ASIGNATURA NOMBRE DE LA ASIGNATURA TRONCO COMÚN 2005-2 4348 DINÁMICA PRÁCTICA NO. DIN-09 LABORATORIO DE NOMBRE DE LA PRÁCTICA LABORATORIO DE CIENCIAS BÁSICAS PÉNDULO SIMPLE
CARRERA PLAN DE ESTUDIO CLAVE ASIGNATURA NOMBRE DE LA ASIGNATURA TRONCO COMÚN 2005-2 4348 DINÁMICA PRÁCTICA NO. DIN-09 LABORATORIO DE NOMBRE DE LA PRÁCTICA LABORATORIO DE CIENCIAS BÁSICAS PÉNDULO SIMPLE
INTRODUCCIÓN. FUNCIONES. LÍMITES.
 INTRODUCCIÓN. FUNCIONES. LÍMITES. Este capítulo puede considerarse como una prolongación y extensión del anterior, límite de sucesiones, al campo de las funciones. Se inicia recordando el concepto de función
INTRODUCCIÓN. FUNCIONES. LÍMITES. Este capítulo puede considerarse como una prolongación y extensión del anterior, límite de sucesiones, al campo de las funciones. Se inicia recordando el concepto de función
CINEMÁTICA: MOVIMIENTO CIRCULAR, CONCEPTOS BÁSICOS Y GRÁFICAS
 CINEMÁTICA: MOVIMIENTO CIRCULAR, CONCEPTOS BÁSICOS Y GRÁFICAS Un volante cuyo diámetro es de 3 m está girando a 120 r.p.m. Calcular: a) su frecuencia, b) el periodo, c) la velocidad angular, d) la velocidad
CINEMÁTICA: MOVIMIENTO CIRCULAR, CONCEPTOS BÁSICOS Y GRÁFICAS Un volante cuyo diámetro es de 3 m está girando a 120 r.p.m. Calcular: a) su frecuencia, b) el periodo, c) la velocidad angular, d) la velocidad
4.3 Problemas de aplicación 349
 4. Problemas de aplicación 49 4. Problemas de aplicación Ejemplo 4.. Circuito Eléctrico. En la figura 4.., se muestra un circuito Eléctrico de mallas en el cual se manejan corrientes, una en cada malla.
4. Problemas de aplicación 49 4. Problemas de aplicación Ejemplo 4.. Circuito Eléctrico. En la figura 4.., se muestra un circuito Eléctrico de mallas en el cual se manejan corrientes, una en cada malla.
Finanzas. Sesión 6 Tema 15: Punto de Equilibrio. Escuela Profesional de Ingeniería de Sistemas e Informática
 Finanzas Sesión 6 Tema 15: Punto de Equilibrio Escuela Profesional de Ingeniería de Sistemas e Informática Punto de equilibrio El Punto de Equilibrio de un bien o servicio, está dado por el volumen de
Finanzas Sesión 6 Tema 15: Punto de Equilibrio Escuela Profesional de Ingeniería de Sistemas e Informática Punto de equilibrio El Punto de Equilibrio de un bien o servicio, está dado por el volumen de
En la figura 1 se muestran diferentes trazas polares para G ( jω ) con tres valores diferentes de ganancia K en lazo abierto.
 con tres valores diferentes de ganancia K en lazo abierto.") Maren de Ganancia y Maren de Fase En la fiura se muestran diferentes trazas polares para G ( jω ) con tres valores diferentes de anancia en lazo abierto. Fiura. Trazas polares de G ( jω ) = ( + jωta )(
Maren de Ganancia y Maren de Fase En la fiura se muestran diferentes trazas polares para G ( jω ) con tres valores diferentes de anancia en lazo abierto. Fiura. Trazas polares de G ( jω ) = ( + jωta )(
GEOMETRÍA. que pasa por el punto P y es paralelo a π. (0,9 puntos) b) Determinar la ecuación del plano π
 b) Determinar la ecuación del plano π") GEOMETRÍA 1.- Se considera la recta r : ( x, y, z) = ( t + 1, t,3 t), el plano π: x y z = 0y el punto P (1,1,1). Se pide: a) Determinar la ecuación del plano π 1 que pasa por el punto P y es paralelo a
GEOMETRÍA 1.- Se considera la recta r : ( x, y, z) = ( t + 1, t,3 t), el plano π: x y z = 0y el punto P (1,1,1). Se pide: a) Determinar la ecuación del plano π 1 que pasa por el punto P y es paralelo a
Controladores PID. Virginia Mazzone. Regulador centrífugo de Watt
 Controladores PID Virginia Mazzone Regulador centrífugo de Watt Control Automático 1 http://iaci.unq.edu.ar/caut1 Automatización y Control Industrial Universidad Nacional de Quilmes Marzo 2002 Controladores
Controladores PID Virginia Mazzone Regulador centrífugo de Watt Control Automático 1 http://iaci.unq.edu.ar/caut1 Automatización y Control Industrial Universidad Nacional de Quilmes Marzo 2002 Controladores
Ejercicios de Ondas Mecánicas y Ondas Electromagnéticas.
 Ejercicios de Ondas Mecánicas y Ondas Electromagnéticas. 1.- Determine la velocidad con que se propagación de una onda a través de una cuerda sometida ala tensión F, como muestra la figura. Para ello considere
Ejercicios de Ondas Mecánicas y Ondas Electromagnéticas. 1.- Determine la velocidad con que se propagación de una onda a través de una cuerda sometida ala tensión F, como muestra la figura. Para ello considere
Práctico 2: Mecánica lagrangeana
 Mecánica Anaĺıtica Curso 2016 Práctico 2: Mecánica lagrangeana 1. La polea y la cuerda de la figura son ideales y los bloques deslizan sin roce. Obtenga las aceleraciones de los bloques a partir de las
Mecánica Anaĺıtica Curso 2016 Práctico 2: Mecánica lagrangeana 1. La polea y la cuerda de la figura son ideales y los bloques deslizan sin roce. Obtenga las aceleraciones de los bloques a partir de las
Estabilidad BIBO de Sistemas Lineales
 Estabilidad BIBO de Sistemas Lineales Notas para el curso del Sistemas Lineales 2 UNIVERSIDAD DE LA REPÚBLICA FACULTAD DE INGENIERÍA INSTITUTO DE INGENIERÍA ELÉCTRICA Montevideo, segundo semestre del 27
Estabilidad BIBO de Sistemas Lineales Notas para el curso del Sistemas Lineales 2 UNIVERSIDAD DE LA REPÚBLICA FACULTAD DE INGENIERÍA INSTITUTO DE INGENIERÍA ELÉCTRICA Montevideo, segundo semestre del 27
CAPITULO XII PUENTES DE CORRIENTE ALTERNA
 CAPITULO XII PUENTES DE CORRIENTE ALTERNA 2. INTRODUCCION. En el Capítulo IX estudiamos el puente de Wheatstone como instrumento de medición de resistencias por el método de detección de cero. En este
CAPITULO XII PUENTES DE CORRIENTE ALTERNA 2. INTRODUCCION. En el Capítulo IX estudiamos el puente de Wheatstone como instrumento de medición de resistencias por el método de detección de cero. En este
TEMA 1. MATRICES, DETERMINANTES Y APLICACIÓN DE LOS DETERMINANTES. CONCEPTO DE MATRIZ. LA MATRIZ COMO EXPRESIÓN DE TABLAS Y GRAFOS.
 TEMA 1. MATRICES, DETERMINANTES Y APLICACIÓN DE LOS DETERMINANTES. 1. MATRICES. CONCEPTO DE MATRIZ. LA MATRIZ COMO EXPRESIÓN DE TABLAS Y GRAFOS. DEFINICIÓN: Las matrices son tablas numéricas rectangulares
TEMA 1. MATRICES, DETERMINANTES Y APLICACIÓN DE LOS DETERMINANTES. 1. MATRICES. CONCEPTO DE MATRIZ. LA MATRIZ COMO EXPRESIÓN DE TABLAS Y GRAFOS. DEFINICIÓN: Las matrices son tablas numéricas rectangulares
TRANSFORMADA DE LAPLACE. Definición: Transformada de Laplace. Sea f(t) una función definida para t 0; a la expresión
 una función definida para t 0; a la expresión") TRANSFORMADA DE LAPLACE Definición: Transformada de Laplace. Sea f(t) una función definida para t 0; a la expresión L= = Se le llama Transformada de Laplace de la función f(t), si la integral existe. Notación:
TRANSFORMADA DE LAPLACE Definición: Transformada de Laplace. Sea f(t) una función definida para t 0; a la expresión L= = Se le llama Transformada de Laplace de la función f(t), si la integral existe. Notación:
Slide 1 / 71. Movimiento Armónico Simple
 Slide 1 / 71 Movimiento Armónico Simple Slide 2 / 71 MAS y Movimiento Circular Hay una profunda conexión entre el Movimiento armónico simple (MAS) y el Movimiento Circular Uniforme (MCU). Movimiento armónico
Slide 1 / 71 Movimiento Armónico Simple Slide 2 / 71 MAS y Movimiento Circular Hay una profunda conexión entre el Movimiento armónico simple (MAS) y el Movimiento Circular Uniforme (MCU). Movimiento armónico
y d dos vectores de igual módulo, dirección y sentido contrario.
 MINI ENSAYO DE FÍSICA Nº 1 1. Sean c r r y d dos vectores de igual módulo, dirección y sentido contrario. r El vector resultante c - d r tiene A) dirección y sentido igual a c r y el cuádruplo del módulo
MINI ENSAYO DE FÍSICA Nº 1 1. Sean c r r y d dos vectores de igual módulo, dirección y sentido contrario. r El vector resultante c - d r tiene A) dirección y sentido igual a c r y el cuádruplo del módulo
Ejercicios para el Examen departamental
 Departamento de Física Y Matemáticas Ejercicios para el Examen departamental 1ª Parte M. en I.C. J. Cristóbal Cárdenas O. 15/08/2011 Ejercicios para el examen departamental de Cálculo 1 primera parte A
Departamento de Física Y Matemáticas Ejercicios para el Examen departamental 1ª Parte M. en I.C. J. Cristóbal Cárdenas O. 15/08/2011 Ejercicios para el examen departamental de Cálculo 1 primera parte A
UNIDAD IV DISTANCIA ENTRE DOS PUNTOS
 UNIDAD IV DISTANCIA ENTRE DOS PUNTOS Dados los puntos: P(x1, y1) y Q(x2, y2), del plano, hallemos la distancia entre P y Q. Sin pérdida de generalidad, tomemos los puntos P y Q, en el primer cuadrante
UNIDAD IV DISTANCIA ENTRE DOS PUNTOS Dados los puntos: P(x1, y1) y Q(x2, y2), del plano, hallemos la distancia entre P y Q. Sin pérdida de generalidad, tomemos los puntos P y Q, en el primer cuadrante
Unidad 1: SISTEMAS DE ECUACIONES. MÉTODO DE GAUSS
 Unidad 1: SISTEMAS DE ECUACIONES. MÉTODO DE GAUSS 1.1.- SISTEMAS DE ECUACIONES LINEALES Ecuación lineal Las ecuaciones siguientes son lineales: 2x 3 = 0; 5x + 4y = 20; 3x + 2y + 6z = 6; 5x 3y + z 5t =
Unidad 1: SISTEMAS DE ECUACIONES. MÉTODO DE GAUSS 1.1.- SISTEMAS DE ECUACIONES LINEALES Ecuación lineal Las ecuaciones siguientes son lineales: 2x 3 = 0; 5x + 4y = 20; 3x + 2y + 6z = 6; 5x 3y + z 5t =
INSTITUCIÓN EDUCATIVA GABRIEL TRUJILLO CORREGIMIENTO DE CAIMALITO, PEREIRA
 INSTITUCIÓN EDUCATIVA GABRIEL TRUJILLO CORREGIMIENTO DE CAIMALITO, PEREIRA La matemática es la ciencia del orden y la medida, de bellas cadenas de razonamientos, todos sencillos y fáciles. René Descartes
INSTITUCIÓN EDUCATIVA GABRIEL TRUJILLO CORREGIMIENTO DE CAIMALITO, PEREIRA La matemática es la ciencia del orden y la medida, de bellas cadenas de razonamientos, todos sencillos y fáciles. René Descartes
SOLUCIONARIO GUÍA ESTÁNDAR ANUAL Ondas I: ondas y sus características
 SOLUCIONARIO GUÍA ESTÁNDAR ANUAL Ondas I: ondas y sus características SGUICES001CB32-A16V1 Ítem Alternativa Habilidad 1 B Reconocimiento 2 D Reconocimiento 3 E Comprensión 4 C Comprensión 5 A Aplicación
SOLUCIONARIO GUÍA ESTÁNDAR ANUAL Ondas I: ondas y sus características SGUICES001CB32-A16V1 Ítem Alternativa Habilidad 1 B Reconocimiento 2 D Reconocimiento 3 E Comprensión 4 C Comprensión 5 A Aplicación
2º INGENIERÍA INDUSTRIAL TEORÍA DE CIRCUITOS Y SISTEMAS
 º INGENIERÍA INDUSTRIAL TEORÍA DE CIRCUITOS Y SISTEMAS PRÁCTICA 7 SISTEMAS. UTILIDADES MATLAB. TRANSFORMADAS Y ANTITRANSFORMADAS Matlab permite obtener transformadas y antitransformadas de Fourier, Laplace
º INGENIERÍA INDUSTRIAL TEORÍA DE CIRCUITOS Y SISTEMAS PRÁCTICA 7 SISTEMAS. UTILIDADES MATLAB. TRANSFORMADAS Y ANTITRANSFORMADAS Matlab permite obtener transformadas y antitransformadas de Fourier, Laplace