Visualización y Transformaciones de Proyección para Computación Gráfica y Modelamiento. Prof. María Cecilia Rivara
|
|
|
- Guillermo Sáez Sevilla
- hace 7 años
- Vistas:
Transcripción
1 Visualiación y Transformaciones e Proyección ara Comutación Gráfica y Moelamiento Prof. María Cecilia Rivara mcrivara@cc.uchile.cl
2 Contenio Visualiación 3D: concetos y elementos imortantes Proyecciones geométricas lanas: clasificación y concetos Volumen e la vista y ventana e visualiación Deucción e matrices e royección Comentarios sobre imlementación: transformaciones e normaliación Transformaciones e royección en OenGL 2
3 Proceso visualiación 3D Moelo Coor. Muno 3D Necesitamos... Visualiación Raster 2D Proyecciones: transforman objetos 3D en royecciones en lano 2D Volumen e la vista Plano e royección que se reuce a ventana (viewort en el isositivo) Cliing (recorte) contra volumen e la vista 3
4 Visualiación 3D 2D Renering (intao) e la imagen Es el roceso comleto que ermite asar e la escena moelaa en el esacio 3D e la alicación al esacio raster (iscretiao) el isositivo. Se obtiene así la imagen e la escena en el isositivo. El roceso e renering se escribe meiante una línea e flujo (renering ieline) que escribe la secuencia e métoos, técnicas y algoritmos necesarios ara obtener la imagen 4
5 Flujo el renering simlificao Esacio el moelo o Alicación Transformaciones e la vista Esacio e visualiación o Esacio e la cámara 3D 3D Transformaciones e Proyección Esacio e la Imagen Transformaciones e esliegue Esacio el Disositivo 2D 2D 5
6 Elementos útiles en royección el muno 3D en CG Transformaciones e royección. Son herramientas matemáticas que ermiten asar e la escena el muno en 3D a la ventana e visualiación 2D en un isositivo / monitor / antalla / ael. Winow: ventana rectangular e visualiación en coorenaas el muno Viewort (ventana rectangular e visualiación en la antalla el isositivo gráfico). e laos aralelos a los laos e la antalla. 6
7 Cliing (Recorte) Cliing (recorte). Conceto imortante que se trauce en algoritmos / técnicas que ermiten restringir los objetos / atos en 2D o, 3D, a la orción e éstos que son visibles en un viewort o en un volumen e la vista e la escena en 3D. El volumen e la vista contiene el eao e la escena 3D cuya royección será visible en la ventana e visualiación (corresone a la vista e una cámara) y esués en el viewort. Cliing es un conceto clave ara reucir el trabajo comutacional. Cliing también se usa en algoritmos e eliminación e caras no visibles ara recortar un olígono contra olígono. 7
8 Proyecciones Geométricas Planas (materia resentaa según Voley-Van Dam et al) Referencia muy imortante en CG 8
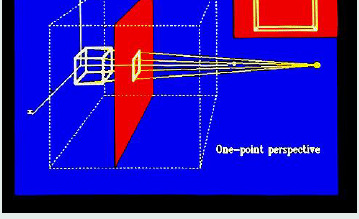
9 Proyecciones Geométricas Planas Concetos: royectores rectos, centro e royección, lano e royección Proyecciones Persectiva Centro e royección a istancia finita el lano e royección A A B B A Paralela Centro e royección a istancia infinita el lano e royección A B B CP (royectores convergen) CP en el infinito (royectores aralelos) 9
10 Proyección e Persectiva El tamaño el objeto varía inversamente con la istancia el objeto al centro e royección. Objetos arecen más realistas No es útil ara almacenar forma y meias exactas e los objetos. Las líneas aralelas en general no se mantienen aralelas. Proyecciones e líneas aralelas que no son aralelas al lano e royección convergen en un unto e anulación (vanishing oint) 10
11 Clasificación Proyecciones Geométricas Planas Paralela Persectiva Un unto Ortográfica Oblicua Dos untos Planta Cabinet Tres untos Elevación frontal Lateral Isométrica Cavalier 11
12 Proyección Persectiva (clasificación) Un unto. El lano e royección corta un eje rincial (lano e royección aralelo a un lano el sistema e coorenaas). Dos untos. Plano e royección corta os ejes rinciales. Tres untos Plano e royección corta los tres ejes rinciales. Ejes rinciales son ejes el sistema e coorenaas. En alicaciones e ingeniería se alinean con caras imortantes el objeto 12
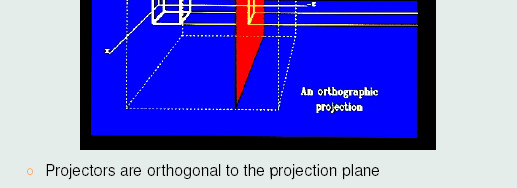
13 Proyección Paralela Ortográfica. Dirección e royección es normal al lano e royección Planta, elevación, lateral son usaas en ingeniería. Plano e royección es erenicular a eje rincial Isométrica. Normal al lano e royección forma ángulos iguales con ejes rinciales. Vistas más reales Oblicua. Los royectores no son normales al lano e royección. Plano e royección es normal a un eje rincial Cavalier. Proyectores forman ángulo e 45º con lano e royección Cabinet. Proyectores forman ángulo e arctg (2) = 63.4º 13
14 Volumen e la vista en CG 3D Ientifica la arte visible e la escena Deene la transformación e royección utiliaa 14
15 Volumen e la vista royección aralela ortográfica Plano el frente Plano e la vista Plano e atrás VRP VPN B F Volumen e la vista truncao ara royección aralela ortográfica 15
16 Volumen e la vista royección ersectiva Plano el frente Plano e la vista Plano e atrás VRP VPN F B Volumen e la vista truncao ara royección en ersectiva 16
17 Plano e visualiación en 3D 17
18 Ventana e Visualiación en 3D 18
19 19
20 20
21 21
22 22
23 23
24 24
25 Plano e royección y sistema e coorenaas En CG en abstracto, según convenciones Foley-van Dam et al Plano e Proyección VRP (view reference oint) Punto sobre el lano VPN (view lano normal) Normal al lano VRC Sistema e coorenaas e referencia e la vista (u, v, n) VRP: Origen el sistema VPN: Un eje el sistema (n) VUP (view u vector): Determina el eje e irección hacia arriba. La royección e VUP sobre el lano e la vista efine el eje v. 25
26 v VUP Plano e la vista VRP n VPN u Ventana e visualiación. Definia or límites (u min,v min ) (u max, v max ). No necesariamente centraa en CW (centro e la ventana) Proyección. Se efine meiante PRP (rojection reference oint) e inicaor el tio e royección Si es ersectiva PRP es el centro e royección Si es aralela, la irección e royección (DOP) va ese PRP a CW 26
27 Deucción e una matri e ersectiva simétrica simle (volumen e la vista simétrico) 27
28 Persectiva: lano e royección en = 28
29 Triángulos semejantes x = x x = x / y = y y = y / Matricialmente M er = / 0 29
30 Multilicano M er or P= [x y 1] T M er P = [x y /] T w = / 1 Luego ara recuerar el unto en R 3 es necesario iviir or w. Luego (x, y, ) = x x/, y /, 1 30
31 lano e royección = 0, centro e royección en = - + = + = + = + = 1 / y y 1 / x x y y x x x Persectiva (Otra eucción) 31 = 1 1/ M' er En este caso uee tener a infinito x
32 Proyección Paralela Ortográfica Plano e royección en = 0 irección e royección normal al lano e royección M ort =
33 Deucción general que integra royecciones en aralela y ersectiva x o y COP Q ( x, y, ) P (x, y, ) P(, y, ) (0, 0, ) lano e royección = centro e royección COP a istancia Q el unto (0, 0, ) irección ese (0, 0, ) a COP ao or vector e irección normaliao ( x, y, ) Ec. aramétrica línea recta e COP a P P L (t) = COP + t (P - COP) 0 t 1 33
34 Aemás COP = (0, 0, ) + Q ( x, y, ) Luego ara P cualquiera sobre la línea (ecuación aramétrica) x = Q x + (x - Q x ) t y = Q y + (y - Q y ) t = ( + Q ) + (- ( + Q )) t P se encuentra en la intersección e P L (t) con lano e royección =. Luego hacieno = y resolvieno ara t t = - ( - ( + Q + Q ) ) 34
35 y x y x x + = + = D y y D x Luego: 35 1 Q - one D Q Q Q 2 + = + + = D (se trabajó sobre ientia = ara tener el mismo enominaor D)
36 + + = 1 Q Q Q Q M 2 y y x x general Incluye M er M er M ort 36 Q ( x, y, ) M ort M er M er 0 (0, 0, -1) (0, 0, -1) 0 (0, 0, -1)
37 Plano e la vista Puee ubicarse alternativamente sobre el lano el frente o fuera el volumen e la vista. Los istintos sistemas gráficos usan convenciones levemente istintas. En OenGL el lano e la vista corresone al lano el frente 37
38 Proyecciones en OenGL 38
39 Función glfrustrum 39
40 Función glfrustrum (muy simle y con oco control) Frustrum es el volumen e la vista Near y far son istancias ese el unto e vista a los lanos (e cliing) e aelante y atrás. Coorenaas (left, bottom, -near), (right, to near) efine la ventana e la vista. No necesariamente efine volumen e la vista simétrico. 40
41 Función glupersective 41
42 Función glupersective (avanao) Volumen e la vista simétrico Parámetros fovy: ángulo el camo e vista en lano x-. Varía entre 0 y 180. asect: raón e asecto e la ventana e la vista. Ancho/altura. neary faristancias ese el unto e vista a los lanos e cliinge aelante (near) y atrás (far) a lo largo el eje. Son valores ositivos. 42
43 Proyección aralela ortográfica 43
44 44
45 45
46 46
Graficación. Tipos de proyección 3D. Proyección 3D. De la 3D a la 2D
 De la 3D a la D Graficación Muno 3D Reconstrucción Mapeo a D clipping transformación Una es una reucción el ominio P n R n P m R m, con m < n Típicamente: n 3 y m Un proyector es un segmento que une P
De la 3D a la D Graficación Muno 3D Reconstrucción Mapeo a D clipping transformación Una es una reucción el ominio P n R n P m R m, con m < n Típicamente: n 3 y m Un proyector es un segmento que une P
Vista tridimensional. Del Libro: Introducción a la Graficación por Computador. Foley Van Dam Feiner Hughes - Phillips
 Vista tridimensional Basado en: Capítulo 6 Del Libro: Introducción a la Graficación por Computador Foley Van Dam Feiner Hughes - Phillips Resumen del capítulo Proyecciones Proyección en perspectiva Proyección
Vista tridimensional Basado en: Capítulo 6 Del Libro: Introducción a la Graficación por Computador Foley Van Dam Feiner Hughes - Phillips Resumen del capítulo Proyecciones Proyección en perspectiva Proyección
Lección 8 Vistas y Proyecciones
 Lección 8 Vistas y Proyecciones Trinità, Massacio. Contenidos Vistas y proyecciones Vistas 3D clásicas Especificación del marco de referencia y las vistas de la cámara Posición y apuntamiento de la cámara
Lección 8 Vistas y Proyecciones Trinità, Massacio. Contenidos Vistas y proyecciones Vistas 3D clásicas Especificación del marco de referencia y las vistas de la cámara Posición y apuntamiento de la cámara
El pipeline de visualización es el conjunto de
 Sistemas de Visualización Pipeline de visualización 3D Definición del modelo geométrico Transformaciones geométricas Transformaciones de visualización Volumen de visualización Proyecciones Pipeline de
Sistemas de Visualización Pipeline de visualización 3D Definición del modelo geométrico Transformaciones geométricas Transformaciones de visualización Volumen de visualización Proyecciones Pipeline de
Alfredo Weitzenfeld Gráfica: Vistas 3D 1
 Alfreo Weitenfel Gráfica: Vistas 3D Vistas 3D... 2 Esecificación e la Cámara... 2 Transformación el marco munial al marco e vista... 4 Esecificación e Vista... 5 Proecciones... 7 Proección Paralela...
Alfreo Weitenfel Gráfica: Vistas 3D Vistas 3D... 2 Esecificación e la Cámara... 2 Transformación el marco munial al marco e vista... 4 Esecificación e Vista... 5 Proecciones... 7 Proección Paralela...
Como la ecuación de la superficie no contiene a la variable z, concluimos que la superficie es simétrica respecto al plano xy.
 5 ESTUDIO DEL CILINDRO PARABÓLICO 1 - Estudio de la Simetría a) Simetría resecto a los lanos coordenados Simetría resecto al lano Como la ecuación de la suerficie no contiene a la variable, concluimos
5 ESTUDIO DEL CILINDRO PARABÓLICO 1 - Estudio de la Simetría a) Simetría resecto a los lanos coordenados Simetría resecto al lano Como la ecuación de la suerficie no contiene a la variable, concluimos
Cámara. Práctica 5. 5.1. Introducción. 5.1.1. Proyección
 Práctica 5 Cámara 5.1. Introducción En esta práctica se aborda la creación de la cámara virtual, esto es, el medio o forma mediante el cual vamos a poder observar los elementos de la escena. De nuevo,
Práctica 5 Cámara 5.1. Introducción En esta práctica se aborda la creación de la cámara virtual, esto es, el medio o forma mediante el cual vamos a poder observar los elementos de la escena. De nuevo,
Ejercicios de Gráficos Proyecciones
 Ejercicios de Gráficos Proyecciones Pedro Pascual 17 de marzo de 2010 1. Indicar cuáles de las siguientes afirmaciones son verdaderas (V) y cúales son falsas (F): 1. La pseudodistancia 3D viene determinada
Ejercicios de Gráficos Proyecciones Pedro Pascual 17 de marzo de 2010 1. Indicar cuáles de las siguientes afirmaciones son verdaderas (V) y cúales son falsas (F): 1. La pseudodistancia 3D viene determinada
Bloque 33 Guía: Ecuación de la recta en el plano cartesiano SGUICEG055EM33-A17V1
 SGUICEG055EM-A7V Bloque Guía: Ecuación de la recta en el lano cartesiano TABLA DE CORRECCIÓN ECUACIÓN DE LA RECTA EN EL PLANO CARTESIANO N Clave Dificultad estimada B Alicación Media A Alicación Media
SGUICEG055EM-A7V Bloque Guía: Ecuación de la recta en el lano cartesiano TABLA DE CORRECCIÓN ECUACIÓN DE LA RECTA EN EL PLANO CARTESIANO N Clave Dificultad estimada B Alicación Media A Alicación Media
Visualización - Parte 1 - Dpto. de Informática Fac. Cs. Físico-Mat. y Nat. Universidad Nacional De San Luis Argentina
 Visualización - Parte 1 - Dpto. de Informática Fac. Cs. Físico-Mat. y Nat. Universidad Nacional De San Luis Argentina Rendering - Generación de la Imagen El rendering, es el proceso por medio del cual
Visualización - Parte 1 - Dpto. de Informática Fac. Cs. Físico-Mat. y Nat. Universidad Nacional De San Luis Argentina Rendering - Generación de la Imagen El rendering, es el proceso por medio del cual
MATEMÁTICAS II Valores extremos Curso de funciones de varias variables
 MATEMÁTICAS II Valores etremos Curso - e unciones e varias variables EJERCICIOS ) Calcular el volumen e la caja rectangular más grane situaa en el primer octante con tres e sus caras en los planos coorenaos
MATEMÁTICAS II Valores etremos Curso - e unciones e varias variables EJERCICIOS ) Calcular el volumen e la caja rectangular más grane situaa en el primer octante con tres e sus caras en los planos coorenaos
TEMA 5: Vistas en 3D
 TEMA 5: Vistas en 3D Índice. Proecciones. Proección Paralela 2. Proección Perspectiva 2. Transformación de Vista. Introducción 2. Parametros de vista 3. Obtención de los vectores del nuevo sistema 4. Construcción
TEMA 5: Vistas en 3D Índice. Proecciones. Proección Paralela 2. Proección Perspectiva 2. Transformación de Vista. Introducción 2. Parametros de vista 3. Obtención de los vectores del nuevo sistema 4. Construcción
Geometría Proyectiva. Héctor Navarro
 Geometría Proyectiva Héctor Navarro Geometría Proyectiva Es el estudio de propiedades geométricas que son invariantes bajo transformaciones proyectivas Plano proyectivo Si consideramos en el modelo de
Geometría Proyectiva Héctor Navarro Geometría Proyectiva Es el estudio de propiedades geométricas que son invariantes bajo transformaciones proyectivas Plano proyectivo Si consideramos en el modelo de
Cámara y Proyecciones Paralelas: Ortogonales, Axonométricas y Oblicuas. Integrantes: Fernández, Kevin # Manzanares, Javier #
 Cámara y Proyecciones Paralelas: Ortogonales, Axonométricas y Oblicuas. Integrantes: Fernández, Kevin #06-39521 Manzanares, Javier #06-39843 La Cámara La cámara son nuestros ojos virtuales. Todo lo que
Cámara y Proyecciones Paralelas: Ortogonales, Axonométricas y Oblicuas. Integrantes: Fernández, Kevin #06-39521 Manzanares, Javier #06-39843 La Cámara La cámara son nuestros ojos virtuales. Todo lo que
Tema 8. Sistemas de Representación
 Tema 8 Sistemas de Representación Geometría Descriptiva (I) Geometría: Parte de las matemáticas que estudia el espacio y las figuras que se pueden formar en él a partir de puntos, líneas, planos y volúmenes.
Tema 8 Sistemas de Representación Geometría Descriptiva (I) Geometría: Parte de las matemáticas que estudia el espacio y las figuras que se pueden formar en él a partir de puntos, líneas, planos y volúmenes.
VECTORES DEL ESPACIO. VECTORES COPLANARES. Tres vectores u, v y w son coplanares si, y solamente si, existen. dos reales α y β tales que: w = αu + βv.
 VECTORES DEL ESACIO. Las definiciones operaciones con los vectores del plano se generalian al espacio. Igualdad de vectores Fórmula de Chasles Multiplicación de un real por un vector AB = CD si sólo si
VECTORES DEL ESACIO. Las definiciones operaciones con los vectores del plano se generalian al espacio. Igualdad de vectores Fórmula de Chasles Multiplicación de un real por un vector AB = CD si sólo si
UNIDAD DE APRENDIZAJE II
 UNIDAD DE APRENDIZAJE II Saberes procedimentales 1. Emplea de manera sistemática conceptos algebraicos, geométricos, trigonométricos y de geometría analítica. 2. Relaciona una ecuación algebraica con a
UNIDAD DE APRENDIZAJE II Saberes procedimentales 1. Emplea de manera sistemática conceptos algebraicos, geométricos, trigonométricos y de geometría analítica. 2. Relaciona una ecuación algebraica con a
Tema 7. Tema Introducción. Gràfics per Computador 2004/2005 Tema 7. Proyecciones 1. Paso de 3D a 2D
 Tema 7 Tema 7 Tema 7. Proyecciones 7.1 Introducción 7.2 Proyección perspectiva 7.3 Proyección paralela ortográfica 7.4 Matrices de proyección 7.5 Modelo de la cámara Gràfics per Computador 2004/2005 Tema
Tema 7 Tema 7 Tema 7. Proyecciones 7.1 Introducción 7.2 Proyección perspectiva 7.3 Proyección paralela ortográfica 7.4 Matrices de proyección 7.5 Modelo de la cámara Gràfics per Computador 2004/2005 Tema
2.- (Puntuación máxima 2 puntos). Para cada valor del parámetro real a, se consideran los tres planos siguientes:
. Para cada valor del parámetro real a, se consideran los tres planos siguientes:") 1.- (Puntuación máxima 3 puntos). Se consideran las rectas: a) (1 punto) Calcular la distancia entre r y s. b) (1 punto) Hallar unas ecuaciones cartesianas de la recta perpendicular común a r y s y que
1.- (Puntuación máxima 3 puntos). Se consideran las rectas: a) (1 punto) Calcular la distancia entre r y s. b) (1 punto) Hallar unas ecuaciones cartesianas de la recta perpendicular común a r y s y que
a) La ecuación del plano que pasa por el punto ( 1, 1, 0 ). (3 puntos) b) La ecuación del plano que es paralelo a la recta r.
 La ecuación del plano que pasa por el punto ( 1, 1, 0 ). (3 puntos) b) La ecuación del plano que es paralelo a la recta r.") PROBLEMAS DE SELECTIVIDAD. BLOQUE GEOMETRÍA 1. En el espacio se dan las rectas Obtener a) El valor de para el que las rectas r y s están contenidas en un plano. (4 puntos) b) La ecuación del plano que
PROBLEMAS DE SELECTIVIDAD. BLOQUE GEOMETRÍA 1. En el espacio se dan las rectas Obtener a) El valor de para el que las rectas r y s están contenidas en un plano. (4 puntos) b) La ecuación del plano que
TEMA 4: Transformaciones 3D
 TEMA 4: Transformaciones D Ínice. Sistemas e Coorenaas. Transformaciones Básicas. Traslación. Escalao. Rotación lana 4. Afilamiento 5. Deformaciones. Composición e Transformaciones 4. Rotación General
TEMA 4: Transformaciones D Ínice. Sistemas e Coorenaas. Transformaciones Básicas. Traslación. Escalao. Rotación lana 4. Afilamiento 5. Deformaciones. Composición e Transformaciones 4. Rotación General
Industrial Data ISSN: Universidad Nacional Mayor de San Marcos Perú
 Industrial Data ISSN: 1560-9146 iifi@unmsm.edu.e Universidad Nacional Mayor de San Marcos Perú Raffo Lecca, Eduardo; Ruiz Lizama, Edgar Geometría comutacional: el roblema del cerco convexo Industrial Data,
Industrial Data ISSN: 1560-9146 iifi@unmsm.edu.e Universidad Nacional Mayor de San Marcos Perú Raffo Lecca, Eduardo; Ruiz Lizama, Edgar Geometría comutacional: el roblema del cerco convexo Industrial Data,
Geometría Analítica. GEOMETRÍA ANALÍTICA PLANA SISTEMA DE COORDENADAS RECTANGULARES 1. DE UN PUNTO 2. DISTANCIA ENTRE DOS PUNTOS
 Geometría Analítica GEOMETRÍA ANALÍTICA PLANA René Descartes, matemático francés, en 67 define una ecuación algebraica para cada figura geométrica; es decir, un conjunto de pares ordenados de números reales
Geometría Analítica GEOMETRÍA ANALÍTICA PLANA René Descartes, matemático francés, en 67 define una ecuación algebraica para cada figura geométrica; es decir, un conjunto de pares ordenados de números reales
SISTEMAS DE COORDENADAS EN EL ESPACIO
 Matemática Diseño Inustrial Coorenaas en el espacio Ing. vila Ing. Moll SISTEMS DE CRDENDS EN EL ESPCI De forma similar a la vista para el plano, se pueen efinir istintos sistemas e coorenaas. CRDENDS
Matemática Diseño Inustrial Coorenaas en el espacio Ing. vila Ing. Moll SISTEMS DE CRDENDS EN EL ESPCI De forma similar a la vista para el plano, se pueen efinir istintos sistemas e coorenaas. CRDENDS
II. HIDROSTÁTICA. Es la parte de la hidráulica que estudia los líquidos en reposo.
 UNIVERIDAD POLITENIA DE ARTAENA EUELA TENIA UPERIOR DE INENIERIA ARONOMIA II. HIDROTÁTIA Es la arte de la hidráulica que estudia los líquidos en reoso. El cálculo de los emujes hidrostáticos ejercidos
UNIVERIDAD POLITENIA DE ARTAENA EUELA TENIA UPERIOR DE INENIERIA ARONOMIA II. HIDROTÁTIA Es la arte de la hidráulica que estudia los líquidos en reoso. El cálculo de los emujes hidrostáticos ejercidos
Visualización y Realismo: Problemas Capítulo 2
 Visualización y Realismo: Problemas Capítulo 2 Carlos Ureña Almagro Curso 2011-12 1 Problema 2.1 Calcula los coeficientes de la ecuación implícita de la recta que pasa por los puntos p 0 y p 1 Y p 0 p
Visualización y Realismo: Problemas Capítulo 2 Carlos Ureña Almagro Curso 2011-12 1 Problema 2.1 Calcula los coeficientes de la ecuación implícita de la recta que pasa por los puntos p 0 y p 1 Y p 0 p
Cálculo Diferencial e Integral - Volumen de un sólido. Prof. Farith J. Briceño N.
 Cálculo Diferencial e Integral - Volumen de un sólido. Prof. Farith J. Briceño N. Objetivos a cubrir Volumen de un sólido : Secciones transversales. Volumen de un sólido de revolución : Método del disco.
Cálculo Diferencial e Integral - Volumen de un sólido. Prof. Farith J. Briceño N. Objetivos a cubrir Volumen de un sólido : Secciones transversales. Volumen de un sólido de revolución : Método del disco.
Naturales (avanzado) Propiedades de la suma y de la resta. Propiedades de la multiplicación y la división. Jerarquía de operaciones.
 Propiedades de la suma y de la resta. Propiedades de la multiplicación y la división. Jerarquía de operaciones.") LEYENDA: (unidad interactiva) (unidad interactiva con ejercicios extra) (unidad no interactiva) (en roceso) ARITMÉTICA Naturales Naturales (básico) Sistema decimal. Orden. Oeraciones. Aroximación. Naturales
LEYENDA: (unidad interactiva) (unidad interactiva con ejercicios extra) (unidad no interactiva) (en roceso) ARITMÉTICA Naturales Naturales (básico) Sistema decimal. Orden. Oeraciones. Aroximación. Naturales
MATEMATICAS. BC2 TEMA 6: Rectas y Planos en R 3
 MATEMATICAS. BC2 TEMA 6: Rectas y Planos en R 3 1. Las coordenadas de los vértices consecutivos de un paralelogramo son A (1, 0, 0) y B(0, 1, 0). Las coordenadas del centro M son M(0, 0, 1). Hallar las
MATEMATICAS. BC2 TEMA 6: Rectas y Planos en R 3 1. Las coordenadas de los vértices consecutivos de un paralelogramo son A (1, 0, 0) y B(0, 1, 0). Las coordenadas del centro M son M(0, 0, 1). Hallar las
Preparación para los Tutoriales Herramientas Astronómicas
 Preparación para los Tutoriales Herramientas Astronómicas Proyecto Ventana Interactiva al Universo Departamento e Ingeniería Eléctrica, Universia e Chile c Primavera 2005 Resumen En el presente tutorial
Preparación para los Tutoriales Herramientas Astronómicas Proyecto Ventana Interactiva al Universo Departamento e Ingeniería Eléctrica, Universia e Chile c Primavera 2005 Resumen En el presente tutorial
ALGEBRA LINEAL. Capítulo III: Vectores en los espacios bidimensional y tridimensional. MsC. Andrés Baquero. jueves, 2 de julio de 15
 ALGEBRA LINEAL Capítulo III: Vectores en los espacios bidimensional y tridimensional MsC. Andrés Baquero jueves, 2 de julio de 15 Introducción a los vectores Vectores Geométricos Vectores Geométricos Vectores
ALGEBRA LINEAL Capítulo III: Vectores en los espacios bidimensional y tridimensional MsC. Andrés Baquero jueves, 2 de julio de 15 Introducción a los vectores Vectores Geométricos Vectores Geométricos Vectores
Algebra y Geometría Analítica. Ing. Carlos A. LOPEZ Prof. Ricardo Massucco. Con la colaboración del Ing. Carlos CHONG
 Algebra Geometría Analítica Ing. Carlos A. LOPEZ Prof. Ricardo Massucco Con la colaboración del Ing. Carlos CHONG Para comenar : Quien nos uede decir ué es 1? Lo rimero ue nos deberíamos reguntar es Dónde?
Algebra Geometría Analítica Ing. Carlos A. LOPEZ Prof. Ricardo Massucco Con la colaboración del Ing. Carlos CHONG Para comenar : Quien nos uede decir ué es 1? Lo rimero ue nos deberíamos reguntar es Dónde?
NIVEL : 1er. AÑO PROF. L. ALTIMIRAS R. CARRERA : GEOGRAFÍA AYUD. C. ESCOBEDO C. AÑO : 2009 GEOMETRÍA ANALÍTICA
 UNIVERSIDAD DE CHILE FACULTAD DE ARQUITECTURA Y URBANISMO ESCUELA DE GEOGRAFÍA DEPARTAMENTO DE CIENCIAS DE LA CONSTRUCCIÓN ASIGNATURA : MATEMATICAS MATERIAL DE APOYO NIVEL : 1er. AÑO PROF. L. ALTIMIRAS
UNIVERSIDAD DE CHILE FACULTAD DE ARQUITECTURA Y URBANISMO ESCUELA DE GEOGRAFÍA DEPARTAMENTO DE CIENCIAS DE LA CONSTRUCCIÓN ASIGNATURA : MATEMATICAS MATERIAL DE APOYO NIVEL : 1er. AÑO PROF. L. ALTIMIRAS
Geometría del plano y el espacio
 Geometría del plano y el espacio AMD Grado en Ingeniería Informática AMD Grado en Ingeniería Informática (UM) Geometría del plano y el espacio 1 / 21 Objetivos Al final de este tema tendréis que Conocer
Geometría del plano y el espacio AMD Grado en Ingeniería Informática AMD Grado en Ingeniería Informática (UM) Geometría del plano y el espacio 1 / 21 Objetivos Al final de este tema tendréis que Conocer
TEMAS 6 Y 7 GEOMETRÍA EN EL ESPACIO
 Ejercicios Selectividad Temas 6 y 7 Geometría en el espacio Mate II 2º Bach. 1 TEMAS 6 Y 7 GEOMETRÍA EN EL ESPACIO EJERCICIO 1 : Julio 11-12. Optativa (3 ptos) Para los puntos A(1,0,2) y B(-1,2,4) y la
Ejercicios Selectividad Temas 6 y 7 Geometría en el espacio Mate II 2º Bach. 1 TEMAS 6 Y 7 GEOMETRÍA EN EL ESPACIO EJERCICIO 1 : Julio 11-12. Optativa (3 ptos) Para los puntos A(1,0,2) y B(-1,2,4) y la
UNIVERSIDAD NACIONAL DE INGENIERIA UNI - NORTE Facultad de Tecnología de la Construcción. Dibujo y Geometría Descriptiva II
 UNIVERSIDAD NACIONAL DE INGENIERIA UNI - NORTE Facultad de Tecnología de la Construcción Dibujo y Geometría Descriptiva II Unidad I Axonometría Ing. Sergio Navarro Hudiel Estelí, Noviembre 2005 Unidad
UNIVERSIDAD NACIONAL DE INGENIERIA UNI - NORTE Facultad de Tecnología de la Construcción Dibujo y Geometría Descriptiva II Unidad I Axonometría Ing. Sergio Navarro Hudiel Estelí, Noviembre 2005 Unidad
UNIDAD XVII LA LINEA RECTA. Modulo 4 Ecuación de la recta
 UNIDAD XVII LA LINEA RECTA Modulo 4 Ecuación de la recta OBJETIVO Encontrar y determinar la ecuación de una recta, conocidos los puntos de intersección con los ejes coordenados. 4. 1. LINEA RECTA. Lugar
UNIDAD XVII LA LINEA RECTA Modulo 4 Ecuación de la recta OBJETIVO Encontrar y determinar la ecuación de una recta, conocidos los puntos de intersección con los ejes coordenados. 4. 1. LINEA RECTA. Lugar
7. [2013] [JUN-A] a) Pueden existir vectores u y v tales que u = 2, v = 3 y u v = 8? Justifique la respuesta.
![7. [2013] [JUN-A] a) Pueden existir vectores u y v tales que u = 2, v = 3 y u v = 8? Justifique la respuesta.](/thumbs/71/65551146.jpg "7. [2013] [JUN-A] a) Pueden existir vectores u y v tales que u = 2, v = 3 y u v = 8? Justifique la respuesta.") 1. [014] [EXT-A] a) Determine el valor o valores de m, si existen, para que la recta r: mx+y = x+ mz = : x-y-z+6 = 0. b) Determine la distancia del punto P= (,1,1) a la recta r cuando m =. sea paralela
1. [014] [EXT-A] a) Determine el valor o valores de m, si existen, para que la recta r: mx+y = x+ mz = : x-y-z+6 = 0. b) Determine la distancia del punto P= (,1,1) a la recta r cuando m =. sea paralela
Procesamiento Digital de Imágenes
 Visión or Comutadora Unidad III Procesamiento Digital de Imágenes Rogelio Ferreira Escutia Contenido 1) Oeraciones Individuales a) Transformaciones Punto a Punto b) Transformaciones de 2 Imágenes Punto
Visión or Comutadora Unidad III Procesamiento Digital de Imágenes Rogelio Ferreira Escutia Contenido 1) Oeraciones Individuales a) Transformaciones Punto a Punto b) Transformaciones de 2 Imágenes Punto
TEMA 1 Álgebra de matrices 4 sesiones. TEMA 2 Determinantes 4 sesiones. TEMA 3 Sistemas de ecuaciones 4 sesiones
 1.1. MATEMÁTICAS II TEMPORALIZACIÓN Y SECUENCIACIÓN: TEMA 1 Álgebra de matrices 4 sesiones TEMA 2 Determinantes 4 sesiones TEMA 3 Sistemas de ecuaciones 4 sesiones TEMA 4 Vectores en el espacio 4 sesiones
1.1. MATEMÁTICAS II TEMPORALIZACIÓN Y SECUENCIACIÓN: TEMA 1 Álgebra de matrices 4 sesiones TEMA 2 Determinantes 4 sesiones TEMA 3 Sistemas de ecuaciones 4 sesiones TEMA 4 Vectores en el espacio 4 sesiones
EJERCICIOS DE GEOMETRÍA
 1) Sean las rectas EJERCICIOS DE GEOMETRÍA x 2y 6z 1 r : x y 0 x y 1 s: z 2 a a) Determinar la posición relativa de r y s según los valores de a. b) Calcular la distancia entre las rectas r y s cuando
1) Sean las rectas EJERCICIOS DE GEOMETRÍA x 2y 6z 1 r : x y 0 x y 1 s: z 2 a a) Determinar la posición relativa de r y s según los valores de a. b) Calcular la distancia entre las rectas r y s cuando
TEMA 7 Las formas y las medidas que nos rodean. 2. Repaso a las figuras planas elementales
 TEMA 7 Las formas y las medidas que nos rodean 1. Introducción 1.1. Qué es la geometría? Es una rama de la matemática que se ocupa del estudio de las propiedades de las figuras geométricas en el plano
TEMA 7 Las formas y las medidas que nos rodean 1. Introducción 1.1. Qué es la geometría? Es una rama de la matemática que se ocupa del estudio de las propiedades de las figuras geométricas en el plano
MATHEMATICA. Geometría - Recta. Ricardo Villafaña Figueroa. Material realizado con Mathematica. Ricardo Villafaña Figueroa
 MATHEMATICA Geometría - Recta Material realizado con Mathematica 2 Contenido Sistema de Coordenadas... 3 Distancia entre dos puntos... 3 Punto Medio... 5 La Recta... 8 Definición de recta... 8 Pendiente
MATHEMATICA Geometría - Recta Material realizado con Mathematica 2 Contenido Sistema de Coordenadas... 3 Distancia entre dos puntos... 3 Punto Medio... 5 La Recta... 8 Definición de recta... 8 Pendiente
BLOQUE 2 : GEOMETRÍA
 BLOQUE 2 : GEOMETRÍA EJERCICIO 1 Dado el plano Л : x + 2y z = 2, el punto P( 2,3,2) perteneciente al plano Л y la recta r de ecuación:, a) Determina la posición relativa de r y Л. b) Calcula la ecuación
BLOQUE 2 : GEOMETRÍA EJERCICIO 1 Dado el plano Л : x + 2y z = 2, el punto P( 2,3,2) perteneciente al plano Л y la recta r de ecuación:, a) Determina la posición relativa de r y Л. b) Calcula la ecuación
GEOMETRIA DEL ESPACIO. Geometría del espacio, rama de la geometría que se ocupa de las. propiedades y medidas de figuras geométricas en el espacio
 GEOMETRIA DEL ESPACIO Geometría del espacio, rama de la geometría que se ocupa de las propiedades y medidas de figuras geométricas en el espacio tridimensional. Entre estas figuras, también llamadas sólidos,
GEOMETRIA DEL ESPACIO Geometría del espacio, rama de la geometría que se ocupa de las propiedades y medidas de figuras geométricas en el espacio tridimensional. Entre estas figuras, también llamadas sólidos,
ALGEBRA. Escuela Politécnica Superior de Málaga
 ALGEBRA. Escuela Politécnica Superior de Málaga Tema 1. Espacios Vectoriales. Sistemas de ecuaciones. Espacio vectorial. Espacios vectoriales R n. Dependencia e independencia lineal. Base. Matrices y determinantes.
ALGEBRA. Escuela Politécnica Superior de Málaga Tema 1. Espacios Vectoriales. Sistemas de ecuaciones. Espacio vectorial. Espacios vectoriales R n. Dependencia e independencia lineal. Base. Matrices y determinantes.
TEMA 5. RECTAS Y PLANOS. INCIDENCIA.
 TEMA 5. RECTAS Y PLANOS. INCIDENCIA. SISTEMA DE REFERENCIA EN EL ESPACIO. Un sistema de referencia en el espacio está formado por un punto y tres vectores linealmente independientes. A partir de ahora
TEMA 5. RECTAS Y PLANOS. INCIDENCIA. SISTEMA DE REFERENCIA EN EL ESPACIO. Un sistema de referencia en el espacio está formado por un punto y tres vectores linealmente independientes. A partir de ahora
"RESUMEN DE LAS PRINCIPALES CARACTERÍSTICAS DE CONTROLADORES PID"
 MNTERO DE EDUCACÓN UNVERDAD NACONAL DE AN JUAN FACULTAD DE NGENERÍA DEPARTAMENTO DE ELECTRÓNCA Y AUTOMÁTCA "REUMEN DE LA PRNCPALE CARACTERÍTCA DE CONTROLADORE PD" AUTOR: CÁTEDRA: CARRERA: ng. Analía Pérez
MNTERO DE EDUCACÓN UNVERDAD NACONAL DE AN JUAN FACULTAD DE NGENERÍA DEPARTAMENTO DE ELECTRÓNCA Y AUTOMÁTCA "REUMEN DE LA PRNCPALE CARACTERÍTCA DE CONTROLADORE PD" AUTOR: CÁTEDRA: CARRERA: ng. Analía Pérez
CLASE II Estática de las construcciones II
 ntroucción a las construcciones CLASE Estática e las construcciones lustración sobre la variación e los esfuerzos e estructuras simples. Galileo Galilei, en Discorsi e Dimostrazioni Matematiche, intorno
ntroucción a las construcciones CLASE Estática e las construcciones lustración sobre la variación e los esfuerzos e estructuras simples. Galileo Galilei, en Discorsi e Dimostrazioni Matematiche, intorno
E.U.P. de Sevilla, Fundamentos Matemáticos de la Ingeniería, Electrónica. Convocatoria de Septiembre ( ), primera parte.
, primera parte.") E.U.P. de Sevilla, Fundamentos Matemáticos de la Ingeniería, Electrónica. Convocatoria de Setiembre (-9-), rimera arte. PROBLEMA A) [ untos] Dada la función f() e : i) Localice el máimo absoluto de f()
E.U.P. de Sevilla, Fundamentos Matemáticos de la Ingeniería, Electrónica. Convocatoria de Setiembre (-9-), rimera arte. PROBLEMA A) [ untos] Dada la función f() e : i) Localice el máimo absoluto de f()
UN PLANO, PLANO DEL DIBUJO
 GEOMETRÍA DESCRITIVA/ ROYECCIONES # GEOMETRÍA DESCRITIVA Es la ciencia, o método matemático gráfico, que tiene por objeto la representación sobre UN LANO, LANO DEL DIBUJO, de las figuras o cuerpos del
GEOMETRÍA DESCRITIVA/ ROYECCIONES # GEOMETRÍA DESCRITIVA Es la ciencia, o método matemático gráfico, que tiene por objeto la representación sobre UN LANO, LANO DEL DIBUJO, de las figuras o cuerpos del
Matemáticas I. Escuela Politécnica Superior de Sevilla, curso Grados en Ingeniería Eléctrica, Electrónica Industrial y Mecánica.
 Matemáticas I. Escuela Politécnica Suerior de Sevilla, curso - Grados en Ingeniería Eléctrica, Electrónica Industrial Mecánica. Boletín n o. Curvas en forma cartesiana.. Determinar la derivada de las siguiente
Matemáticas I. Escuela Politécnica Suerior de Sevilla, curso - Grados en Ingeniería Eléctrica, Electrónica Industrial Mecánica. Boletín n o. Curvas en forma cartesiana.. Determinar la derivada de las siguiente
Colegio Internacional Torrequebrada. Departamento de Matemáticas
 Geometría. Problema 1: Calcula la distancia del punto P(1, 1, 1) a la recta Problema 2: Dadas las rectas, se pide: a) Analiza su posición relativa. b) Halla la ecuación general del plano π que contiene
Geometría. Problema 1: Calcula la distancia del punto P(1, 1, 1) a la recta Problema 2: Dadas las rectas, se pide: a) Analiza su posición relativa. b) Halla la ecuación general del plano π que contiene
1. Hallar la derivada por definición de f ( x) x x 1. Solución: para resolver la derivada aplicaremos la definición de la derivada: f '( x)
 x x 1. Solución: para resolver la derivada aplicaremos la definición de la derivada: f '( x)") . Hallar la erivaa por efinición e f ( ) Solución: para resolver la erivaa aplicaremos la efinición e la erivaa: f '( ) lim 0 f ( ) f ( ) f ( ) f '( ) lim 0 ara allar la erivaa meiante efinición ebemos
. Hallar la erivaa por efinición e f ( ) Solución: para resolver la erivaa aplicaremos la efinición e la erivaa: f '( ) lim 0 f ( ) f ( ) f ( ) f '( ) lim 0 ara allar la erivaa meiante efinición ebemos
SECRETARÍA DE EDUCACIÓN PÚBLICA DIRECCIÓN GENERAL DE EDUCACIÓN SUPERIOR TECNOLÓGICA INSTITUTO TECNOLÓGICO DE VERACRUZ. Carrera: Ingeniería Mecatrónica
 SECRETARÍA DE EDUCACIÓN PÚBLICA DIRECCIÓN GENERAL DE EDUCACIÓN SUPERIOR TECNOLÓGICA INSTITUTO TECNOLÓGICO DE VERACRUZ Carrera: Ingeniería Mecatrónica Materia: Robótica Titular de la materia: Dr. José Antonio
SECRETARÍA DE EDUCACIÓN PÚBLICA DIRECCIÓN GENERAL DE EDUCACIÓN SUPERIOR TECNOLÓGICA INSTITUTO TECNOLÓGICO DE VERACRUZ Carrera: Ingeniería Mecatrónica Materia: Robótica Titular de la materia: Dr. José Antonio
TEMAS 6 Y 7 RECTAS Y PLANOS EN EL ESPACIO
 Temas 6 y 7 Rectas y planos en el espacio Matemáticas II - 2º Bachillerato 1 TEMAS 6 Y 7 RECTAS Y PLANOS EN EL ESPACIO RECTAS Y PLANOS EJERCICIO 1 : Halla el volumen del tetraedro determinado por los ejes
Temas 6 y 7 Rectas y planos en el espacio Matemáticas II - 2º Bachillerato 1 TEMAS 6 Y 7 RECTAS Y PLANOS EN EL ESPACIO RECTAS Y PLANOS EJERCICIO 1 : Halla el volumen del tetraedro determinado por los ejes
GUÍA NÚMERO 22 TRANSFORMACIONES ISOMÉTRICAS
 Saint Gaspar College MISIONEROS DE LA PRECIOSA SANGRE Formando Personas Íntegras Departamento de Matemática RESUMEN PSU MATEMATICA GUÍA NÚMERO 22 TRANSFORMACIONES ISOMÉTRICAS Definición: Se llaman transformaciones
Saint Gaspar College MISIONEROS DE LA PRECIOSA SANGRE Formando Personas Íntegras Departamento de Matemática RESUMEN PSU MATEMATICA GUÍA NÚMERO 22 TRANSFORMACIONES ISOMÉTRICAS Definición: Se llaman transformaciones
DIBUJO Y SISTEMAS DE REPRESENTACIÓN
 DEPARTAMENTO DE MATEMÁTICA DIBUJO Y SISTEMAS DE REPRESENTACIÓN Bioingeniería Unidad V: Sistemas de Representación por Proyección Única Dibujo y Sistemas de Representación Bioingeniería Unidad V Página
DEPARTAMENTO DE MATEMÁTICA DIBUJO Y SISTEMAS DE REPRESENTACIÓN Bioingeniería Unidad V: Sistemas de Representación por Proyección Única Dibujo y Sistemas de Representación Bioingeniería Unidad V Página
DIBUJO Y DISEÑO ASISTIDO POR COMPUTADORA. Unidad V: SISTEMAS DE REPRESENTACIÓN POR PROYECCIÓN ÚNICA
 DEPARTAMENTO DE MATEMÁTICA DIBUJO Y DISEÑO ASISTIDO POR COMPUTADORA ELÉCTRICA ELECTROMECÁNICA ELECTRÓNICA Unidad V: SISTEMAS DE REPRESENTACIÓN POR PROYECCIÓN ÚNICA Dibujo y Diseño Asistido por Computadora
DEPARTAMENTO DE MATEMÁTICA DIBUJO Y DISEÑO ASISTIDO POR COMPUTADORA ELÉCTRICA ELECTROMECÁNICA ELECTRÓNICA Unidad V: SISTEMAS DE REPRESENTACIÓN POR PROYECCIÓN ÚNICA Dibujo y Diseño Asistido por Computadora
RECTA DE PERFIL. Descripción: Recorridos Posibles: 4. Características de sus Proyecciones: Puntos Notables de la Recta de PerFIl:
 CURSO ROECIA ESACIA - profesor: Alejandra oblete. Descripción: Forma un ángulo cualquiera con los Elementos del Sistema Está contenida en un lano de erfil: odos los puntos que pertenecen a ella tienen
CURSO ROECIA ESACIA - profesor: Alejandra oblete. Descripción: Forma un ángulo cualquiera con los Elementos del Sistema Está contenida en un lano de erfil: odos los puntos que pertenecen a ella tienen
GRAFICAS DE INGENIERÍA
 El dibujo es una forma de comunicación, los tipos de dibujos que encontramos son: 1. Artístico: Utilizado para expresar los sentimientos, las creencias, las filosofías, o ideas abstractas de un artista.
El dibujo es una forma de comunicación, los tipos de dibujos que encontramos son: 1. Artístico: Utilizado para expresar los sentimientos, las creencias, las filosofías, o ideas abstractas de un artista.
. Halla los valores de α en cada uno de los siguientes casos: a) (1 punto) u r, v
 (1 punto) u r, v") EJERCICIOS BLOQUE III: GEOMETRÍA (04-M;Jun-A-4) Considera la recta r que pasa por los puntos A (,0, ) y (,,0 ) a) ( punto) Halla la ecuación de la recta s paralela a r que pasa por C (,,) b) (5 puntos)
EJERCICIOS BLOQUE III: GEOMETRÍA (04-M;Jun-A-4) Considera la recta r que pasa por los puntos A (,0, ) y (,,0 ) a) ( punto) Halla la ecuación de la recta s paralela a r que pasa por C (,,) b) (5 puntos)
x-z = 0 x+y+2 = [2012] [EXT-B] Halla el punto simétrico del P(2,1,-5) respecto de la recta r definida por
![x-z = 0 x+y+2 = [2012] [EXT-B] Halla el punto simétrico del P(2,1,-5) respecto de la recta r definida por](/thumbs/55/35462313.jpg "x-z = 0 x+y+2 = [2012] [EXT-B] Halla el punto simétrico del P(2,1,-5) respecto de la recta r definida por") x = 1+t 1. [014] [EXT-A] Considera los puntos A(1,1,) y B(1,-1,-) y la recta dada por y = t. z = 1 a) Halla la ecuación general del plano que que contiene a r y es paralelo a la recta que pasa por A y
x = 1+t 1. [014] [EXT-A] Considera los puntos A(1,1,) y B(1,-1,-) y la recta dada por y = t. z = 1 a) Halla la ecuación general del plano que que contiene a r y es paralelo a la recta que pasa por A y
EJERCICIOS BLOQUE III: GEOMETRÍA
 EJERCICIOS BLOQUE III: GEOMETRÍA (05-M4;Jun-B-4) Sea el plano π x + y z + 8 a) (5 puntos) Calcula el punto, P simétrico del punto (,,5 ) b) ( punto) Calcula la recta r, simétrica de la recta plano π P
EJERCICIOS BLOQUE III: GEOMETRÍA (05-M4;Jun-B-4) Sea el plano π x + y z + 8 a) (5 puntos) Calcula el punto, P simétrico del punto (,,5 ) b) ( punto) Calcula la recta r, simétrica de la recta plano π P
PROBLEMAS RESUELTOS SELECTIVIDAD ANDALUCÍA 2011 MATEMÁTICAS II TEMA 3: ESPACIO AFIN Y EUCLIDEO
 PROBLEMAS RESUELTOS SELECTIVIDAD ANDALUCÍA 0 MATEMÁTICAS II TEMA 3: ESPACIO AFIN Y EUCLIDEO Junio, Ejercicio 4, Opción A Junio, Ejercicio 4, Opción B Reserva, Ejercicio 4, Opción A Reserva, Ejercicio 4,
PROBLEMAS RESUELTOS SELECTIVIDAD ANDALUCÍA 0 MATEMÁTICAS II TEMA 3: ESPACIO AFIN Y EUCLIDEO Junio, Ejercicio 4, Opción A Junio, Ejercicio 4, Opción B Reserva, Ejercicio 4, Opción A Reserva, Ejercicio 4,
INTRODUCCIÓN. Depósito Legal: NA3220/2010 ISSN: REVISTA ARISTA DIGITAL
 7-VERIFIC ACIÓN DEL DIÁMETRO MEDIO DE UN A ROSC A MÉTRICA EXTERNA: MÉTODO DE L AS TRES VARILL AS 01/09/011 Número 1 AUTOR: Javier Domínguez Equiza CENTRO TRABAJO: IES Cinco Villas INTRODUCCIÓN La verificación
7-VERIFIC ACIÓN DEL DIÁMETRO MEDIO DE UN A ROSC A MÉTRICA EXTERNA: MÉTODO DE L AS TRES VARILL AS 01/09/011 Número 1 AUTOR: Javier Domínguez Equiza CENTRO TRABAJO: IES Cinco Villas INTRODUCCIÓN La verificación
ACTIVIDADES GA ACTIVIDAD
 ACTIVIDADES GA ACTIVIDAD 1: (Mié-12-Feb-14) a) Conteste Qué es y para qué sirve un Sistema de referencia? b) Conteste Qué es y para qué sirve un Sistema de coordenadas? c) Conteste Es lo mismo 'sistema
ACTIVIDADES GA ACTIVIDAD 1: (Mié-12-Feb-14) a) Conteste Qué es y para qué sirve un Sistema de referencia? b) Conteste Qué es y para qué sirve un Sistema de coordenadas? c) Conteste Es lo mismo 'sistema
Proyecciones en 3D. Facultad de Cs. de la Computación. Juan Carlos Conde Ramírez. Computer Graphics
 Proyecciones en 3D Facultad de Cs. de la Computación Juan Carlos Conde Ramírez Computer Graphics Contenido 1 Introducción 2 Proyecciones 3 Tipos de Proyección 1 / 21 Contenido 1 Introducción 2 Proyecciones
Proyecciones en 3D Facultad de Cs. de la Computación Juan Carlos Conde Ramírez Computer Graphics Contenido 1 Introducción 2 Proyecciones 3 Tipos de Proyección 1 / 21 Contenido 1 Introducción 2 Proyecciones
1. Determina cuáles de los siguientes conjuntos son subespacios vectoriales. Para aquellos que lo sean, halla una base.
 EJERCICIOS PROPUESTOS 1. Espacios vectoriales. Sistemas de ecuaciones. 1. Determina cuáles de los siguientes conjuntos son subespacios vectoriales. Para aquellos que lo sean, halla una base. (a) S = {
EJERCICIOS PROPUESTOS 1. Espacios vectoriales. Sistemas de ecuaciones. 1. Determina cuáles de los siguientes conjuntos son subespacios vectoriales. Para aquellos que lo sean, halla una base. (a) S = {
MATEMÁTICAS I Unidad 5. GEOMETRÍA ANALÍTICA. Ed. Santillana. SOLUCIONES
 MATEMÁTICAS I Unidad. GEOMETRÍA ANALÍTICA. Ed. Santillana. SOLUCIONES.. a. a 4. a. a 6. a 7. a 8. a 9. a. a. a. a. a 4. a. a 6. a 7. a 8. Ecuación vectorial: ( x, y ) ( 7, ) + λ (, ) Ecuaciones paramétricas:
MATEMÁTICAS I Unidad. GEOMETRÍA ANALÍTICA. Ed. Santillana. SOLUCIONES.. a. a 4. a. a 6. a 7. a 8. a 9. a. a. a. a. a 4. a. a 6. a 7. a 8. Ecuación vectorial: ( x, y ) ( 7, ) + λ (, ) Ecuaciones paramétricas:
Curvas. 1 Representación analítica de curvas Cambio admisible de parámetro... 7
 Curvas M. Eugenia Rosado María Deartamento de Matemática Alicada Escuela Técnica Suerior de Arquitectura, UPM Avda. Juan de Herrera 4, 8040-Madrid, Sain E-mail: eugenia.rosado@um.es Índice 1 Reresentación
Curvas M. Eugenia Rosado María Deartamento de Matemática Alicada Escuela Técnica Suerior de Arquitectura, UPM Avda. Juan de Herrera 4, 8040-Madrid, Sain E-mail: eugenia.rosado@um.es Índice 1 Reresentación
EJERCICIOS DE GEOMETRÍA
 EJERCICIOS DE GEOMETRÍA 1. Se consideran las rectas r x 2 = 0 x 2z = 1, s y + 3 = 0 y + z = 3 a) Estudiar la posición relativa de r y s. b) Hallar la mínima distancia entre ambas. Se pide: Sol: Se cruzan
EJERCICIOS DE GEOMETRÍA 1. Se consideran las rectas r x 2 = 0 x 2z = 1, s y + 3 = 0 y + z = 3 a) Estudiar la posición relativa de r y s. b) Hallar la mínima distancia entre ambas. Se pide: Sol: Se cruzan
NIVEL : 1er. AÑO PROFESORAS: L. ALTIMIRAS R. CARRERA : DISEÑO C RAMIREZ N. AÑO : 2010 AYUDANTE : C. ESCOBEDO C.
 UNIVERSIDAD DE CHILE FACULTAD DE ARQUITECTURA Y URBANISMO ESCUELA DE DISEÑO DEPARTAMENTO DE CIENCIAS DE LA CONSTRUCCION ASIGNATURA : MATEMATICAS MATERIAL DE APOYO NIVEL : 1er. AÑO PROFESORAS: L. ALTIMIRAS
UNIVERSIDAD DE CHILE FACULTAD DE ARQUITECTURA Y URBANISMO ESCUELA DE DISEÑO DEPARTAMENTO DE CIENCIAS DE LA CONSTRUCCION ASIGNATURA : MATEMATICAS MATERIAL DE APOYO NIVEL : 1er. AÑO PROFESORAS: L. ALTIMIRAS
d) Si tiene la siguiente función para la oferta de trabajo:
 Si tiene la siguiente función para la oferta de trabajo:") Capítulo MERCADO DE TRABAJO, FUNCIÓN DE RODUCCIÓN Y OFERTA AGREGADA DE ARGO AZO. Sea la función e proucción: Y = A0( f 0 f ) Done las uniaes en las que se expresa la cantia e trabajaores a emplear son
Capítulo MERCADO DE TRABAJO, FUNCIÓN DE RODUCCIÓN Y OFERTA AGREGADA DE ARGO AZO. Sea la función e proucción: Y = A0( f 0 f ) Done las uniaes en las que se expresa la cantia e trabajaores a emplear son
Análisis de Componentes principales -PCA-
 Análisis de Comonentes rinciales -PCA- PCA en Teledetección... 1 La idea general... 1 El método...2 La interretación...5 Que es? El PCA constituye un rocedimiento matemático que ermite transformar un número
Análisis de Comonentes rinciales -PCA- PCA en Teledetección... 1 La idea general... 1 El método...2 La interretación...5 Que es? El PCA constituye un rocedimiento matemático que ermite transformar un número
TEMA I: DEFINICIÓN Y REPRESENTACIÓN DE ELEMENTOS DEL ESPACIO AFIN
 TEMA I: DEFINICIÓN Y REPRESENTACIÓN DE ELEMENTOS..D - Sistema de referencia DEL ESPACIO AFIN En el Sistema Diédrico se tilian tres lanos ortogonales (XY, XZ ZY), denominados PH, PV PP) sobre los qe se
TEMA I: DEFINICIÓN Y REPRESENTACIÓN DE ELEMENTOS..D - Sistema de referencia DEL ESPACIO AFIN En el Sistema Diédrico se tilian tres lanos ortogonales (XY, XZ ZY), denominados PH, PV PP) sobre los qe se
DIBUJO MECÁNICO TEMA 3 PROYECCIONES. Prof. Andrés Meléndez
 DIBUJO MECÁNICO TEMA 3 PROYECCIONES Prof. Andrés Meléndez Contenido TEMA 3: PROYECCIONES Definiciones; Métodos de representación: Proyección Ortogonal; Axonométrica; En perspectiva (centro); Representación
DIBUJO MECÁNICO TEMA 3 PROYECCIONES Prof. Andrés Meléndez Contenido TEMA 3: PROYECCIONES Definiciones; Métodos de representación: Proyección Ortogonal; Axonométrica; En perspectiva (centro); Representación
LA CIRCUNFERENCIA. La circunferencia es la sección producida por un plano perpendicular al eje.
 LA CIRCUNFERENCIA La circunferencia es la sección producida por un plano perpendicular al eje. β = 90º La circunferencia es un caso particular de elipse. Se llama circunferencia al lugar geométrico de
LA CIRCUNFERENCIA La circunferencia es la sección producida por un plano perpendicular al eje. β = 90º La circunferencia es un caso particular de elipse. Se llama circunferencia al lugar geométrico de
Distancia Focal de una Lente Delgada
 Distancia Focal e una Lente Delgaa Objetivo: Análisis e iversas lentes elgaas. Equipamiento Teoría Banco Optico Lente convexa Lente concava Fuente e luz (Ampolleta) Fuente e poer para la ampolleta Pantalla
Distancia Focal e una Lente Delgaa Objetivo: Análisis e iversas lentes elgaas. Equipamiento Teoría Banco Optico Lente convexa Lente concava Fuente e luz (Ampolleta) Fuente e poer para la ampolleta Pantalla
GEOMETRÍA PROYECTIVA SISTEMA DIÉDRICO
 GEOMETRÍ PROYECTIV Proyección: La royección de un unto es otro unto que resulta de la intersección de una rayo rayo royectante que asa or el unto original con el lano de royección. Plano de royección:
GEOMETRÍ PROYECTIV Proyección: La royección de un unto es otro unto que resulta de la intersección de una rayo rayo royectante que asa or el unto original con el lano de royección. Plano de royección:
3º ESO - UNIDAD 12.- TRASLACIONES, GIROS Y SIMETRÍAS EN EL PLANO
 3º ESO - UNIDAD 12.- TRASLACIONES, GIROS Y SIMETRÍAS EN EL PLANO OBJETIVOS MÍNIMOS DE LA UNIDAD 12 1.- Reconocer los diferentes tipos de movimientos 2.- En cuanto a las traslaciones, saber construir la
3º ESO - UNIDAD 12.- TRASLACIONES, GIROS Y SIMETRÍAS EN EL PLANO OBJETIVOS MÍNIMOS DE LA UNIDAD 12 1.- Reconocer los diferentes tipos de movimientos 2.- En cuanto a las traslaciones, saber construir la
DISEÑO DE UN SECADOR DE BANDEJAS PROTOTIPO QUE OPERA CON BRIQUETAS DE CARBÓN (ANTRACITA)
") DISEÑO DE UN SECADOR DE BANDEJAS PROTOTIPO QUE OPERA CON BRIQUETAS DE CARBÓN (ANTRACITA) Raúl Siche 1, Hector Rodríguez 1, Hubert Arteaga 2, Segundo Seijas 2 y Enrique Ortega 1 RESUMEN En este trabajo
DISEÑO DE UN SECADOR DE BANDEJAS PROTOTIPO QUE OPERA CON BRIQUETAS DE CARBÓN (ANTRACITA) Raúl Siche 1, Hector Rodríguez 1, Hubert Arteaga 2, Segundo Seijas 2 y Enrique Ortega 1 RESUMEN En este trabajo
Translaciones, giros, simetrías.
 Translaciones, giros, simetrías. Transformaciones geométricas Transformación geométrica es una aplicación del plano en el plano tal que a cada punto de un plano le hace corresponder otro punto del mismo
Translaciones, giros, simetrías. Transformaciones geométricas Transformación geométrica es una aplicación del plano en el plano tal que a cada punto de un plano le hace corresponder otro punto del mismo
COLEGIO NUESTRA SEÑORA DEL BUEN CONSEJO. Melilla LUGARES GEOMÉTRICOS Y CÓNICAS
 LUGARES GEOMÉTRICOS Y CÓNICAS 01. Halla la ecuación de la circunferencia de centro ( 5, 12) y radio 13. Comprueba que pasa por el punto (0, 0). 02. Halla las ecuaciones de los siguientes lugares geométricos:
LUGARES GEOMÉTRICOS Y CÓNICAS 01. Halla la ecuación de la circunferencia de centro ( 5, 12) y radio 13. Comprueba que pasa por el punto (0, 0). 02. Halla las ecuaciones de los siguientes lugares geométricos:
UNIVERSIDAD NACIONAL MAYOR DE SAN MARCOS. Fracciones continuas, ecuación de Pell y unidades en el anillo de enteros de los cuerpos cuadráticos
 UNIVERSIDAD NACIONAL MAYOR DE SAN MARCOS FACULTAD DE CIENCIAS MATEMÁTICAS EAP DE MATEMÁTICA PURA Fracciones continuas, ecuación de Pell y unidades en el anillo de enteros de los cueros cuadráticos Caítulo
UNIVERSIDAD NACIONAL MAYOR DE SAN MARCOS FACULTAD DE CIENCIAS MATEMÁTICAS EAP DE MATEMÁTICA PURA Fracciones continuas, ecuación de Pell y unidades en el anillo de enteros de los cueros cuadráticos Caítulo
Cada grado se divide en 60 minutos (60 ) y cada minuto en 60 segundos (60 ). Así, por ejemplo, un ángulo puede medir = 38º
 y cada minuto en 60 segundos (60 ). Así, por ejemplo, un ángulo puede medir = 38º") Sistemas e meición e ángulos Como en toos los elementos susceptibles a meiciones, en los ángulos se han establecio iversos sistemas e meición, entre ellos los más importantes son: El sistema seagesimal
Sistemas e meición e ángulos Como en toos los elementos susceptibles a meiciones, en los ángulos se han establecio iversos sistemas e meición, entre ellos los más importantes son: El sistema seagesimal
TRAZADO DE DIAGRAMA POLAR Y APLICACIÓN DE CRITERIO DE NYQUIST
 TRAZADO DE DIAGRAMA POLAR Y APLICACIÓN DE CRIRIO DE NYQUIST. TRAZADO DE DIAGRAMA POLAR. La función de transferencia P, tendrá el formato dado or la siguiente exresión generalizada: P ± m m P A P + A P
TRAZADO DE DIAGRAMA POLAR Y APLICACIÓN DE CRIRIO DE NYQUIST. TRAZADO DE DIAGRAMA POLAR. La función de transferencia P, tendrá el formato dado or la siguiente exresión generalizada: P ± m m P A P + A P
x-z = 0 x+y+2 = [2012] [SEP-B] Halla el punto simétrico del P(2,1,-5) respecto de la recta r definida por
![x-z = 0 x+y+2 = [2012] [SEP-B] Halla el punto simétrico del P(2,1,-5) respecto de la recta r definida por](/thumbs/75/72263763.jpg "x-z = 0 x+y+2 = [2012] [SEP-B] Halla el punto simétrico del P(2,1,-5) respecto de la recta r definida por") 1. [01] [SEP-B] Halla el punto simétrico del P(,1,-5) respecto de la recta r definida por x-z = 0 x+y+ = 0.. [01] [SEP-A] Sean los puntos A(0,0,1), B(1,0,-1), C(0,1,-) y D(1,,0). a) Halla la ecuación del
1. [01] [SEP-B] Halla el punto simétrico del P(,1,-5) respecto de la recta r definida por x-z = 0 x+y+ = 0.. [01] [SEP-A] Sean los puntos A(0,0,1), B(1,0,-1), C(0,1,-) y D(1,,0). a) Halla la ecuación del
con a 2 0 se denomina función cuadrática o función de segundo grado, cuyo dominio es
 Función cuadrática Matemática 3º Año Cód. 1306-16 P r o f. M a r í a d e l L u j á n M a r t í n e z P r o f. C a r l a N á o l i P r o f. J o r g e l i n a O s é s Dto. de M at emática FUNCIÓN CUADRÁTICA
Función cuadrática Matemática 3º Año Cód. 1306-16 P r o f. M a r í a d e l L u j á n M a r t í n e z P r o f. C a r l a N á o l i P r o f. J o r g e l i n a O s é s Dto. de M at emática FUNCIÓN CUADRÁTICA
Problema a) En un triángulo rectángulo OAB una recta r paralela a la hipotenusa corta a los catetos OA y OB en los puntos A y B respectivamente.
 En un triángulo rectángulo OAB una recta r paralela a la hipotenusa corta a los catetos OA y OB en los puntos A y B respectivamente.") Problema 717.- a) En un triángulo rectángulo OAB una recta r paralela a la hipotenusa corta a los catetos OA y OB en los puntos A y B respectivamente. Hallar el lugar geométrico de los puntos comunes a
Problema 717.- a) En un triángulo rectángulo OAB una recta r paralela a la hipotenusa corta a los catetos OA y OB en los puntos A y B respectivamente. Hallar el lugar geométrico de los puntos comunes a
TEMA 9.- TRANSFORMACIONES EN EL PLANO.
 GEOMETRÍ: 5.- TRNSFORMIONES EN EL PLNO TEM 9.- TRNSFORMIONES EN EL PLNO. Definición 9.1.- Llamaremos transformación geométrica en el plano a una operación u operaciones geométricas que permiten deducir
GEOMETRÍ: 5.- TRNSFORMIONES EN EL PLNO TEM 9.- TRNSFORMIONES EN EL PLNO. Definición 9.1.- Llamaremos transformación geométrica en el plano a una operación u operaciones geométricas que permiten deducir
PROGRAMA DE CURSO. CC1001 Computación I MA2601 Ecuaciones Diferenciales Ordinarias
 PROGRAMA DE CURSO Código Nombre CC3501 Computación Gráfica, Visualización y Modelación para Ingenieros Nombre en Inglés Computer Graphics, Visualization and Modeling for engineers SCT Unidades Horas de
PROGRAMA DE CURSO Código Nombre CC3501 Computación Gráfica, Visualización y Modelación para Ingenieros Nombre en Inglés Computer Graphics, Visualization and Modeling for engineers SCT Unidades Horas de
SISTEMAS Y PROYECTOS INFORMÁTICOS DISEÑO DE UN VISUALIZADOR POLIGONAL TRIDIMENSIONAL
 SISTEMAS Y PROYECTOS INFORMÁTICOS DISEÑO DE UN VISUALIZADOR POLIGONAL TRIDIMENSIONAL AUTOR: Juan Luis Aragón Alcaraz TUTOR: Isidro Verdú Conesa 5º Curso. Facultad de Informática Universidad de Murcia Diciembre
SISTEMAS Y PROYECTOS INFORMÁTICOS DISEÑO DE UN VISUALIZADOR POLIGONAL TRIDIMENSIONAL AUTOR: Juan Luis Aragón Alcaraz TUTOR: Isidro Verdú Conesa 5º Curso. Facultad de Informática Universidad de Murcia Diciembre
PRUEBAS DE ACCESO A LA UNIVERSIDAD MATERIAS DE MODALIDAD: FASES GENERAL Y ESPECÍFICA
 PRUEBAS DE ACCESO A LA UNIVERSIDAD MATERIAS DE MODALIDAD: FASES GENERAL Y ESPECÍFICA CURSO 013 014 CONVOCATORIA: MATERIA: FÍSICA De las dos ociones rouestas, sólo hay que desarrollar una oción comleta.
PRUEBAS DE ACCESO A LA UNIVERSIDAD MATERIAS DE MODALIDAD: FASES GENERAL Y ESPECÍFICA CURSO 013 014 CONVOCATORIA: MATERIA: FÍSICA De las dos ociones rouestas, sólo hay que desarrollar una oción comleta.
TALLER TRANSFORMACIONES ISOMÉTRICAS. Transformaciones Isométricas
 TALLER TRANSFORMACIONES ISOMÉTRICAS Introducción étricas Actividad: En los siguientes pares de transformaciones, reconoce aquellas en las que se mantiene la forma y el tamaño. Una transformación de una
TALLER TRANSFORMACIONES ISOMÉTRICAS Introducción étricas Actividad: En los siguientes pares de transformaciones, reconoce aquellas en las que se mantiene la forma y el tamaño. Una transformación de una
Viewports e Interacción con el Mouse CG 2014.
 Viewports e Interacción con el Mouse CG 2014. Introducción Los vértices sufren transformaciones para pasar del mundo a la pantalla. Estas transformaciones, las especificamos mediante matrices. Ventana
Viewports e Interacción con el Mouse CG 2014. Introducción Los vértices sufren transformaciones para pasar del mundo a la pantalla. Estas transformaciones, las especificamos mediante matrices. Ventana
Las vistas diédricas dan una información exacta sobre la geometría de los objetos. Sin embargo, si son complejas pueden ser difíciles de interpretar.
 Las vistas diédricas dan una información exacta sobre la geometría de los objetos. Sin embargo, si son complejas pueden ser difíciles de interpretar. Interesará una representación que más que el detalle
Las vistas diédricas dan una información exacta sobre la geometría de los objetos. Sin embargo, si son complejas pueden ser difíciles de interpretar. Interesará una representación que más que el detalle
q = p El conjunto de todas las fracciones racionales se designará en este caso por R(X) y se considerará R[X] R(X).
![q = p El conjunto de todas las fracciones racionales se designará en este caso por R(X) y se considerará R[X] R(X).](/thumbs/55/37457361.jpg "q = p El conjunto de todas las fracciones racionales se designará en este caso por R(X) y se considerará R[X] R(X).") Fracciones Racionales. Introucción. El conjunto R[X] e los olinomios con coeficientes reales, rovisto e la aición y multilicación ue ya conocemos, es un anillo conmutativo con elemento unia. Es ecir, ambas
Fracciones Racionales. Introucción. El conjunto R[X] e los olinomios con coeficientes reales, rovisto e la aición y multilicación ue ya conocemos, es un anillo conmutativo con elemento unia. Es ecir, ambas
ALGEBRA. Escuela Politécnica Superior de Málaga
 ALGEBRA. Escuela Politécnica Superior de Málaga Tema 1. Espacios Vectoriales. Sistemas de ecuaciones. Espacio vectorial. Espacios vectoriales R n. Dependencia e independencia lineal. Base. Matrices y determinantes.
ALGEBRA. Escuela Politécnica Superior de Málaga Tema 1. Espacios Vectoriales. Sistemas de ecuaciones. Espacio vectorial. Espacios vectoriales R n. Dependencia e independencia lineal. Base. Matrices y determinantes.
MYP (MIDDLE YEARS PROGRAMME)
") MYP (MIDDLE YEARS PROGRAMME) 2014-2015 Fecha 19/05/2015 APUNTES DE GEOMETRÍA 2º ESO 1. EL TEOREMA DE PITÁGORAS El teorema de Pitágoras establece que en todo triángulo rectángulo, el cuadrado de la hipotenusa
MYP (MIDDLE YEARS PROGRAMME) 2014-2015 Fecha 19/05/2015 APUNTES DE GEOMETRÍA 2º ESO 1. EL TEOREMA DE PITÁGORAS El teorema de Pitágoras establece que en todo triángulo rectángulo, el cuadrado de la hipotenusa