REPRESENTACIÓN DEL ESTADO TENSIONAL DE UN SÓLIDO. CÍRCULOS DE MOHR
|
|
|
- Lorena Lozano Rey
- hace 8 años
- Vistas:
Transcripción
1 REPRESENTACIÓN DEL ESTADO TENSIONAL DE UN SÓLIDO. CÍRCULOS DE MOHR Los círculos de Mohr son un método para representar gráficamente el estado tensional que padece un punto de un sólido en un instante determinado. Aunque actualmente, gracias a los ordenadores, es posible calcular las tensiones con gran precisión sin recurrir a estos métodos, siguen siendo de gran validez puesto que de un solo golpe de vista hacen comprensible la situación tensional del sólido. Para entender esta representación repasaremos brevemente algunos conceptos ya estudiados como los de esfuerzo (tensión) y deformación, y su modo de ser expresados. 1. ESFUERZO El esfuerzo o tensión se define como una fuerza por unidad de área, con unidades en psi o MPa. En una pieza sujeta a algunas fuerzas, los esfuerzos se distribuyen como una función continuamente variable dentro del continuo del material. Cada elemento infinitesimal en el material puede experimentar esfuerzos distintos al mismo tiempo, por lo que debemos considerar los esfuerzos como actuando sobre elementos infinitesimalmente pequeños dentro de la pieza. Estos elementos suelen modelarse cada uno como un cubo, según se muestra en la Figura 4-1. Las componentes de los esfuerzos actúan en las caras de estos cubos de dos maneras distintas. Los esfuerzos normales actúan de manera perpendicular (es decir, normal) a la cara del cubo y tienen tendencia ya sea a tirar de él (esfuerzo a tracción), o a empujarlo (esfuerzo a compresión). Los esfuerzos cortantes actúan paralelos a las caras de los cubos, en pares sobre caras opuestas, lo que tiende a distorsionar el cubo a forma romboidal. Esto es análogo a tomar las dos rebanadas de pan de un sándwich de Nocilla y deslizarlas en dirección opuesta. Como resultado, la capa de Nocilla se cortará. Estas componentes normales y cortantes del esfuerzo que actúan sobre un elemento infinitesimal conforman los términos de un tensor. El esfuerzo es un tensor de segundo orden y por lo tanto requiere nueve valores componentes para describirlo en tres dimensiones. El tensor de esfuerzos en tres dimensiones se puede expresar como la matriz: σ xx τ yx τ zx τ σ τ xy yy zy τ xz τ yz σ zz (4.1a) donde la notación para cada componente de esfuerzos contiene tres elementos, una magnitud (ya sea σ o τ), la dirección de una normal a la superficie de referencia (primer subíndice) y en una dirección de acción (segundo subíndice). Nos serviremos σ de referimos a los esfuerzos normales y τ para los esfuerzos cortantes. Muchos elementos de maquinaria están sujetos a estados de esfuerzo tridimensionales y por lo tanto requieren un tensor de esfuerzo como el de la ecuación 4.1a. Hay, sin embargo, casos especiales, que se pueden tratar como estados de esfuerzo en dos dimensiones. El tensor de esfuerzo para dos dimensiones es (4.1b) La Figura 4-1 muestra un cubo infinitesimal de material tomado del interior de una pieza sujeta a algunos esfuerzos tridimensionales. Las caras de este cubo infinitesimal son paralelas a un sistema de ejes xyz tomado con alguna orientación conveniente. La orientación de cada una de las caras se

2 define por su vector superficial normal 1 según se muestra en la Figura 4-1a. La normal de superficie a la cara x es paralela al eje de las x, etcétera. Obsérvese que, por lo tanto, hay dos caras x, dos caras y y dos caras z, una positiva y la otra negativa, según se defina el sentido de su vector superficial normal. En las Figuras 4-Ib y c se muestran los nueve componentes de esfuerzo, actuando sobre las superficies de este elemento infinitesimal. Las componentes σ xx, σ yy y σ zz son los esfuerzos normales, que se llaman así porque actúan en dirección normal a las superficies x, y, z del cubo, respectivamente. Las componentes τ xy y τ xz, por ejemplo, son los esfuerzos cortantes que actúan sobre la cara x y cuyas direcciones de acción son paralelas a los ejes y y z, respectivamente. El signo de cualquiera de estas componentes se define como positivo si los signos de su normal a la superficie y la dirección de fuerzo son iguales; y negativo, si son distintos. Por lo que las componentes que se muestran en la Figura 4-lb son todas ellas positivas, porque accionan sobre las caras positivas del cubo y sus direcciones también son positivas. Las componentes que se muestran en la Figura 4-1 c son todas ellas negativas, porque actúan sobre las caras positivas del cubo y sus direcciones son negativas. Esta regla de signos convencional hace que los esfuerzos normales de tracción sean positivos, y los esfuerzos normales de compresión, negativos. En el caso de dos dimensiones, sólo una cara del cubo de esfuerzos necesita dibujarse. Si se retienen las direcciones x y y, y se elimina la z, miraremos perpendicularmente al plano xy del cubo de la Figura 4-1, y veremos los esfuerzos que aparecen en la Figura 4-2, que actúan sobre las caras no vistas del cubo. En función de la regla convencional de signos arriba enunciada, el lector deberá confirmar que las componentes de esfuerzo que aparecen en la Figura 4-2 sean todas positivas. La notación de doble subíndice arriba citada es consistente cuando se aplica a esfuerzos normales. Por ejemplo, el esfuerzo normal σ xx actúa sobre la cara x y también aparece en la dirección x. Dado que en esfuerzos normales los subíndices se repiten, es común eliminar uno de ellos y hacer referencia a las componentes normales o perpendiculares como σ x, σ y y σ z. En las componentes de esfuerzo cortante se necesitan para su definición ambos subíndices y se conservan. También se puede demostrar que el tensor de esfuerzo es simétrico, lo que significa que Con ello se reduce el número de componentes de esfuerzo a calcular. (a) Normales de superficie. (b) Componentes de esfuerzo (c) Componentes de positivas. esfuerzo negativas. FIGURA DEFORMACIÓN 1 Un vector normal de superficie se define como que crece hacia fuera de la superficie del sólido, en dirección perpendicular o normal a dicha superficie. Su signo se define como el sentido de este vector normal de superficie, en el sistema local de coordenadas.

3 En la región elástica de la mayor parte de los materiales de ingeniería el esfuerzo y la deformación están relacionados de manera lineal mediante la ley de Hooke. La deformación es también un tensor de segundo orden y se puede expresar para el caso tridimensional de la forma y en el caso de dos dimensiones (4.3b) donde ε representa tanto una deformación normal como una deformación producida por el esfuerzo cortante, quedando ambas diferenciadas por sus subíndices. Aquí también por comodidad simplificaremos los subíndices repetidos, para deformaciones perpendiculares o normales a ε x, ε y y ε z, y al tiempo consideraremos dobles subíndices para identificar deformaciones por cortante. 3. ESFUERZOS PRINCIPALES Los sistemas de ejes tomados en la Figura 4-1 y la Figura 4-2 son arbitrarios y, por lo general, se eligen por comodidad al calcular los esfuerzos aplicados. Para cualquier combinación particular de esfuerzos aplicados, alrededor de cualquier punto que se analice habrá una distribución continua del campo de esfuerzos. Los esfuerzos normales y cortantes en el punto variarán con la dirección en cualquier sistema de coordenadas que se escoja. Siempre habrá planos sobre los cuales las componentes de esfuerzo cortante sean igual a cero. Los esfuerzos normales que actúan sobre esos planos se conocen como esfuerzos principales. Los planos sobre los cuales estas fuerzas principales actúan se conocen como planos principales. La dirección de las normales de superficie a los planos principales se conocen como ejes principales y los esfuerzos normales que actúan en estas direcciones se conocen como esfuerzos normales principales. Habrá también otro conjunto de ejes mutuamente perpendiculares sobre los cuales los esfuerzos cortantes serán máximos. Los esfuerzos cortantes principales actúan sobre un conjunto o sistema de planos que están a 45º en relación con los planos de los esfuerzos normales principales. En la Figura 4-3 aparecen los planos principales y los esfuerzos principales, para el caso en dos dimensiones de la Figura 4-2. Desde un punto de vista de ingeniería lo que más nos preocupa en el diseño de nuestras piezas de maquinaria es que no fallen y el fallo ocurrirá si el esfuerzo en cualquier punto excede a cierto valor seguro. Es necesario que determinemos los esfuerzos de mayor dimensión (tanto normales como de cortante) que ocurren en cualquier parte dentro del material que forma nuestra pieza de maquinaria. Quizá nos preocupe menos de la dirección de estos esfuerzos que su magnitud, siempre y cuando el material se pueda considerar por lo menos macroscópicamente isótropo, es decir, con propiedades de resistencia uniformes en todas direcciones. La mayor parte de los metales y muchos otros materiales de ingeniería cumplen con estos criterios, aunque como notables excepciones se deben mencionar la madera y los materiales compuestos.

4 La expresión que relaciona los esfuerzos aplicados con los esfuerzos principales es donde σ es la magnitud del esfuerzo principal y n x, n y y n z, son los cosenos directores del vector unitario n, que es normal al plano principal: Para que haya una solución a la ecuación 4.4a, el determinante de la matriz de coeficientes debe ser igual a cero. Al expandir este determinante e igualarlo a cero, obtenemos donde La ecuación 4.4c es un polinomio cúbico en σ. A los coeficientes C 0, C 1, y C 2 se les conoce como invariantes tensoriales, porque tienen los mismos valores, independientemente de la elección inicial de los ejes xyz sobre los cuales se midieron o calcularon los esfuerzos aplicados. Estos tres esfuerzos principales (normales) σ 1, σ 2 y σ 3 son las tres raíces de este polinomio cúbico. Las raíces de este polinomio son siempre reales y, por lo general, quedan ordenadas de manera que σ 1 >σ 2 >σ 3. De ser necesario, se puede determinar la dirección de los vectores principales de esfuerzo, sustituyendo cada raíz de la ecuación 4.4c en 4.4a y resolviendo en función de n x, n y y n z, para cada uno de los tres esfuerzos principales. Las respectivas direcciones de los tres esfuerzos principales son mutuamente ortogonales. Los esfuerzos cortantes principales se pueden determinar a partir de los valores de los esfuerzos normales principales, utilizando Si los esfuerzos normales principales han sido ordenados como se muestra arriba, entonces τ máx = τ 13. Las respectivas direcciones de los planos de los esfuerzos cortantes principales están a 45º de los esfuerzos normales principales, y también son mutuamente ortogonales. La solución de la ecuación 4.4c en función de sus tres raíces se puede hacer de manera trigonométrica o mediante un algoritmo iterativo de determinación de raíces. Para el caso especial de un estado de esfuerzos en dos dimensiones, las ecuaciones 4.4c para el esfuerzo principal se reducen a 2 2 También se aplican las ecuaciones 4.6 cuando un esfuerzo principal es distinto de cero, pero está dirigido a lo largo de uno de los ejes del sistema de coordenadas xyz seleccionado para el cálculo. El cubo de esfuerzos de la Figura 4-2 se gira entonces respecto a un eje principal para determinar los ángulos de los otros dos planos principales.

5 Las dos raíces distintas de cero calculadas a partir de la ecuación 4.6a se identifican temporalmente como σ a y σ b, y en el caso de dos dimensiones, la tercera raíz σ c, será siempre igual a cero. Dependiendo de valores resultantes, las tres raíces entonces se identifican de acuerdo con la regla convencional: la algebraicamente mayor = σ 1, la algebraicamente menor = σ 3 Y la otra = σ 2. Aplicando la ecuación 4.6a para resolver el ejemplo que aparece en la Figura 4-4 nos daría valores de σ 1 = σ a, σ 3 = σ b Y σ 2 = σ c = 0, según aparece indicado en la figura 3. Por supuesto, la ecuación 4.4c correspondiente al caso tridimensional se puede utilizar de todas maneras para resolver cualquier caso en dos dimensiones. Uno de los tres esfuerzos principales determinados aparecerá entonces como igual a cero. Una vez determinados los tres esfuerzos principales y ordenados según se describe arriba, se determina el esfuerzo cortante máximo a partir de la ecuación 4.5: 4. ESFUERZO PLANO Y DEFORMACIÓN PLANA El estado general del esfuerzo y la deformación es tridimensional, pero hay configuraciones geométricas particulares que pueden ser tratadas de manera distinta. Esfuerzo plano El estado de esfuerzos en dos dimensiones, es decir biaxial, también se conoce como esfuerzo plano. El esfuerzo plano requiere que un esfuerzo principal sea igual a cero. Esta situación es común en algunas aplicaciones. Por ejemplo, una placa o un cascarón delgado puede también tener un estado de esfuerzos plano lejos de sus bordes o de sus puntos de sujeción. Estos casos se pueden tratar con el procedimiento más sencillo de las ecuaciones 4.6. Deformación plana Hay deformaciones principales asociadas con los esfuerzos principales. Si una de las deformaciones principales (digamos ε 3 ) es igual a cero, y las deformaciones restantes son independientes de la dimensión a lo largo de su eje principal, n 3, éste se conocerá como deformación plana. Esta situación ocurre en geometrías particulares. Por ejemplo, si una barra larga, sólida, prismática está cargada únicamente en la dirección transversal, aquellas regiones dentro de ella que estén lejos de cualquier restricción en sus extremos tendrán en esencia una deformación igual a cero en la dirección a lo largo del eje de la barra, y se tratará de una deformación plana. (Sin embargo, el esfuerzo no es igual a cero en la dirección de deformación igual a cero.) Un dique hidráulico largo puede considerarse con una situación de deformación plana, en regiones muy lejos de sus extremos o de su base, donde está sujeto a estructuras vecinas. 5. CÍRCULOS DE MOHR 3 Si en el caso de dos dimensiones la regla convencional de numeración en tres dimensiones se sigue con rigidez, entonces algunas veces los dos esfuerzos principales distintos de cero se convertirán en σ 1 y σ 3 si son de signo opuesto (como en el caso del ejemplo 4-1). Otras veces serán σ 1 y σ 2 cuando ambos sean positivos y el menor (σ 3 ) es igual a cero (como en el caso del ejemplo 4-2). Una tercera posibilidad es que ambos esfuerzos principales distintos de cero sean negativos (a compresión) y el algebraicamente mayor del conjunto (σ 1 ) sea entonces igual a cero. La ecuación 4.6 identifica de manera arbitraria los dos esfuerzos bidimensionales principales distintos de cero σ a y σ b, con el que queda (σ c ) reservado para el miembro igual a cero del trío.

6 Desde hace mucho tiempo los círculos de Mohr 4 han sido una forma de solución gráfica de la ecuación 4.6 y de determinar los esfuerzos principales para el caso de esfuerzos planos. Muchos libros de texto sobre diseño de máquinas presentan el método del círculo de Mohr como una técnica primordial de solución para la determinación de esfuerzos principales. Antes de la llegada de las calculadoras y de las computadoras programables, el método gráfico de Mohr era una forma razonable y práctica de resolución de la ecuación 4.6. Hoy día, sin embargo, es mucho más práctico determinar numéricamente los esfuerzos principales. Sin embargo, presentamos el método gráfico por varias razones. Puede servir como verificación rápida a una solución numérica, o quizás sea el único método viable si falla la energía de su computadora o si se agotan las pilas de su calculadora. También cumple con el útil objetivo de ser una presentación visual del estado de los esfuerzos en un punto. También hay círculos de Mohr en el caso de esfuerzos tridimensionales, pero no está disponible ningún método de graficación para crearlos directamente a partir de datos de esfuerzos aplicados, excepto en el caso especial de que uno de los esfuerzos principales sea coincidente con un eje del sistema de coordenadas xyz seleccionado, es decir, cuando uno de los planos es el del esfuerzo principal. Sin embargo, una vez calculados los esfuerzos principales a partir de la ecuación 4.4c mediante alguna técnica adecuada de determinación de raíces, se pueden dibujar círculos de Mohr tridimensionales según los esfuerzos principales calculados. El plano de Mohr --en el cual se trazan los círculos de Mohr- se organiza con sus ejes mutuamente perpendiculares, aunque en el espacio real el ángulo entre ellos representa 180º. Todos los ángulos dibujados en el plano de Mohr tienen el doble de su valor en el espacio real. La abscisa es el eje para todos los esfuerzos normales. Los esfuerzos normales aplicados σ x, σ y y σ z, se trazan a lo largo de este eje y los esfuerzos principales σ 1, σ 2 y σ 3 también se determinan sobre este eje. La ordenada es el eje para todos los esfuerzos cortantes. Se utiliza para trazar los esfuerzos cortantes aplicados τ XY, τ XZ y τ YZ y determinar el esfuerzo cortante máximo 5. Mohr utilizó una regla convencional de signos para esfuerzos cortantes, que hace que los pares esfuerzo cortante en sentido del movimiento de las agujas del reloj sean positivos, lo que no es consistente con la regla de la mano derecha, ahora estándar. Aun así, esta regla convencional de la mano izquierda se sigue empleando para el círculo de Mohr. La mejor manera de demostrar el uso del círculo de Mohr es mediante ejemplos. 4 Ideados por el ingeniero alemán Otto Mohr ( ). Sus círculos también se utilizan para la transformación coordenada de deformaciones, de los momentos de área y de los productos de inercia. 5 El hecho de que Mohr utilizara un mismo eje para trazar más de una variable es una de las fuentes de confusión para los estudiantes cuando se enfrentan por primera vez a este método. Sólo se debe recordar que todos los esfuerzos normales se trazan sobre el eje horizontal, trátese o no de esfuerzos normales (σ x, σ y, σ z ) o de esfuerzos principales (σ 1, σ 2 y σ 3 ) aplicados y todas las tensiones tangenciales se trazan sobre el eje vertical, independientemente que se trate de esfuerzos cortantes (τ xy, etcétera) o de esfuerzos cortantes máximos aplicados (τ 12, etcétera). Los ejes de Mohr no son ejes cartesianos convencionales.

7 EJEMPLO 1 Determinación de los esfuerzos principales mediante los círculos de Mohr Problema Un elemento de esfuerzo biaxial como se muestra en la Figura 4-2 tiene σ x = psi, σ y = psi y τ xy = psi en sentido contrario al de las manecillas del reloj (ccw). Se pide trazar los círculos de Mohr para determinar los esfuerzos principales. Solución Véanse la Figura 4-2 y la Figura Se trazan los ejes del plano de Mohr según se muestra en la Figura 4-5b, y márquelos como σ y τ. 2 Se sitúan los esfuerzos dados σ x, (como línea OA) en cualquier escala práctica a lo largo del eje de esfuerzos normales (horizontales). En este ejemplo σ x., es un esfuerzo de tensión (positivo). 3 Se lleva el esfuerzo σ y (como línea) a lo largo del eje normal de esfuerzos. En este caso σ y es un esfuerzo de compresión (negativo). 4 La Figura 4-2 muestra que el par de esfuerzos cortantes τ xy crea un par en sentido contrario al de las agujas del reloj sobre el elemento. Este par se equilibra con el par en sentido de las agujas del reloj proporcionado por los esfuerzos cortantes τ y. Estos dos esfuerzos cortantes (τ xy y τ yx,) son de igual magnitud, de acuerdo con la ecuación 4.2, y positivos, de acuerdo con la regla de signos convencionales de esfuerzos. Pero, en vez de utilizar la regla convencional de signos de esfuerzos, se trazan en el círculo de Mohr de acuerdo con la rotación que implican para el elemento, según la regla convencional de signos de la mano izquierda: positivo en sentido de las agujas del reloj y negativo en sentido contrario al de las agujas del reloj. 5 Dibujamos una línea vertical hacia abajo --en sentido contrario al movimiento de las agujas del reloj - del extremo de τ x, (como línea AC) para representar la magnitud a escala de τ xy. Trazamos una línea vertical hacia arriba -en sentido del movimiento de las agujas del reloj- del extremo de σ sy (como línea BD) para representar la magnitud a escala de τ yx. 6 El diámetro de un círculo de Mohr es la distancia del punto C al punto D. La línea AB corta a CD. El círculo se dibuja tomando esta intersección como centro. 7 Dos de los esfuerzos normales principales se determinan a continuación como las dos intersecciones que este círculo de Mohr hace con el eje de esfuerzos normales, en los puntos P 1, y P 3 : σ 1 = psi, y σ 3 = psi. 8 Dado que en este ejemplo no hay esfuerzos aplicados en la dirección z, se trata de un estado de esfuerzos de dos dimensiones, y el tercer esfuerzo principal σ 2, es igual a cero, y se localiza en el punto 0, que también se identifica como P 2. 9 Todavía deben dibujarse otros dos círculos de Mohr. Los tres círculos de Mohr quedan definidos por los diámetros (σ 1 σ 2 ), (σ 1 σ 3 ) y de (σ 2 σ 3 ), que son las líneas P 1 P 2, P 1 P 3 Y P 2 P 3. Los tres círculos aparecen en la Figura 4-5c. 10 Trazamos líneas tangentes horizontales desde los extremos superior e inferior de cada círculo de Mohr hasta su intersección con el eje del cortante (vertical). Ello determina los valores de los esfuerzos cortantes principales, asociados con cada par de esfuerzos normales principales: τ 13 = , τ 12 = y τ 23 = psi. A pesar de tener únicamente dos esfuerzos normales principales distintos de cero, hay también tres esfuerzos cortantes principales distintos de cero. Sin embargo, sólo el mayor de ellos, τ máx = τ 3 = psi es de interés para efectos de diseño. 11 También podemos determinar los ángulos (con respecto a nuestros ejes xyz originales) de los esfuerzos normales principales y los cortantes principales, partiendo del círculo de Mohr. Estos ángulos, si el material es homogéneo o isótropo, sólo tienen un interés académico. En caso de no ser isótropo, las propiedades del material dependen de la dirección y entonces la dirección de los esfuerzos principales es de importancia. El ángulo 2Φ = -45' de la Figura 4-5a representa la
 en cualquier escala práctica a lo largo del eje de esfuerzos normales (horizontales). En este ejemplo σ x., es un esfuerzo de tensión (positivo).")
8 orientación del esfuerzo normal principal con respecto al eje de las x en nuestro sistema original. La línea DC del plano de Mohr está en el eje de las x en el espacio real, y los ángulos se miden de acuerdo con la regla convencional de la mano izquierda de Mohr ---en sentido del movimiento de las agujas del reloj- Dado que en el espacio real los ángulos del plano de Mohr son el doble, el ángulo del esfuerzo principal σ 1 con respecto al eje x en el espacio real es Φ = -22.5'. El esfuerzo σ 3 será de 90º a partir de σ 1 y en el espacio real el esfuerzo cortante máximo τ 13 estará a 45º del eje de σ 1.

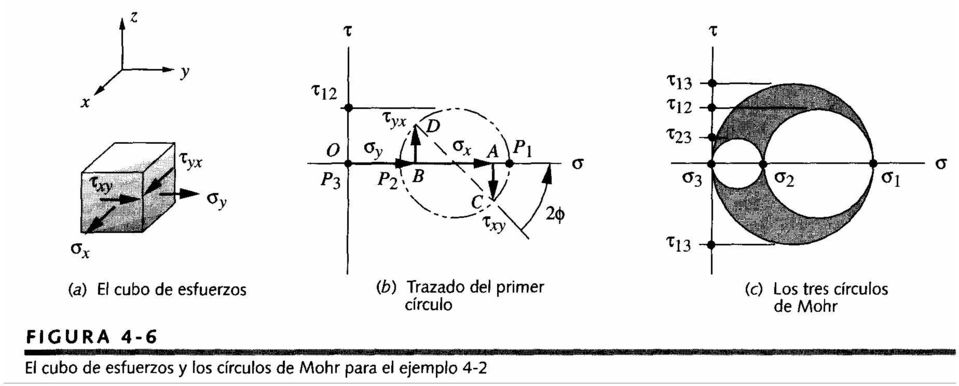
9 EJEMPLO 2 Determinación de esfuerzos planos mediante los círculos de Mohr Problema Un elemento de esfuerzo biaxial como se muestra en la Figura 4-2 tiene σ x, = psi, σ y = psi y τ xy = psi en sentido contrario al movimiento de las manecillas del reloj (ccw). Determínense, mediante círculos de Mohr, los esfuerzos principales. Solución Véanse las Figuras 4-2 y Trazamos los ejes del plano de Mohr según se muestra en la Figura 4-6, e identifíquelos como σ y τ. 2 Se señala el esfuerzo dado σ x, (como línea OA) a escala a lo largo del eje de esfuerzos normales (horizontal). Nuevamente, en este ejemplo σ x, es un esfuerzo de tensión (positivo). 3 Se sitúa el esfuerzo σ y (como línea OB) a escala a lo largo del eje de esfuerzos normal. σ y es también un esfuerzo de tensión (positivo) y, por lo tanto, aparece en la misma dirección que σ x, a lo largo del eje de σ. 4 La Figura 4-2 muestra que el par de esfuerzos cortantes τ xy crean un par contra las agujas del reloj sobre el elemento. Este par está equilibrado por el par con las agujas del reloj proporcionado por los esfuerzos cortantes τ yx, Recuerde que ambos esfuerzos cortantes (τ xy y τ yx,), son iguales, de acuerdo con la ecuación 4.2 y positivos, de acuerdo con la regla convencional de signos de esfuerzos. 5 Trazamos una línea vertical hacia abajo de la punta de σ x, (como línea AC) para representar la magnitud a escala de τ xy. Mediante una línea vertical hacia arriba de la punta de σ y (como línea BD) se representa la magnitud a escala de τ yx. 6 El diámetro de un círculo de Mohr es la distancia del punto C al punto D. La línea AB atraviesa a la línea CD. El círculo se dibuja tomando esta intersección como centro. 7 Dos de los tres esfuerzos normales principales se encuentran a continuación en las dos intersecciones que este círculo de Mohr hace con el eje de esfuerzos normales en los puntos P 1, y P 3 : σ 1 = y σ 2 = psi. Si nos detenemos en este momento, el esfuerzo cortante máximo parece ser τ 12 = psi, según queda definido por la proyección de una tangente horizontal desde la parte superior del círculo con el eje de las τ, según se muestra en la Figura 4-6b. 8 Dado que en este ejemplo no hay ningún esfuerzo aplicado en la dirección z, se trata de un estado de esfuerzos en dos dimensiones, y el tercer esfuerzo principal, σ 3, se sabe que es igual a cero, por lo tanto está localizado en el punto 0, también marcado como punto P 3, 9 Todavía quedan dos círculos de Mohr por dibujar. Los tres círculos de Mohr quedan definidos por los diámetros (σ 1 σ 3 ), (σ 1 σ 2 ) y de (σ 2 σ 3 ), los cuales, en este caso, son las líneas P 1 P 3, P 1 P 2 y P 2 P 3, según se observa en la Figura Llevamos líneas tangentes horizontales de la parte de los extremos superior e inferior de cada círculo de Mohr hasta cruzar el eje del cortante (vertical). Esto determina el valor de los esfuerzos cortantes principales, asociados con cada par de esfuerzos normales principales: es decir, τ 13 = , τ 12 = y τ 23 = psi. El mayor de todos éstos es τ máx = , y no el valor que se determinó en el paso Siempre es el círculo que está entre los esfuerzos principales mayor y menor el que determina el esfuerzo cortante máximo. En el ejemplo anterior, el esfuerzo principal igual a cero no era el menor de los tres, porque uno de los esfuerzos principales era negativo. En este ejemplo, el esfuerzo principal igual a cero es el menor. Por lo tanto, si se dejan de dibujar los tres círculos, se hubiera llegado a un error serio en el valor de τ máx.
 a escala a lo largo del eje de esfuerzos normales (horizontal). Nuevamente, en este ejemplo σ x, es un esfuerzo de tensión (positivo).")
10
a < b y se lee "a es menor que b" (desigualdad estricta) a > b y se lee "a es mayor que b" (desigualdad estricta)
 a > b y se lee a es mayor que b (desigualdad estricta)") Desigualdades Dadas dos rectas que se cortan, llamadas ejes (rectangulares si son perpendiculares, y oblicuos en caso contrario), un punto puede situarse conociendo las distancias del mismo a los ejes,
Desigualdades Dadas dos rectas que se cortan, llamadas ejes (rectangulares si son perpendiculares, y oblicuos en caso contrario), un punto puede situarse conociendo las distancias del mismo a los ejes,
Definición de vectores
 Definición de vectores Un vector es todo segmento de recta dirigido en el espacio. Cada vector posee unas características que son: Origen: O también denominado Punto de aplicación. Es el punto exacto sobre
Definición de vectores Un vector es todo segmento de recta dirigido en el espacio. Cada vector posee unas características que son: Origen: O también denominado Punto de aplicación. Es el punto exacto sobre
COORDENADAS CURVILINEAS
 CAPITULO V CALCULO II COORDENADAS CURVILINEAS Un sistema de coordenadas es un conjunto de valores que permiten definir unívocamente la posición de cualquier punto de un espacio geométrico respecto de un
CAPITULO V CALCULO II COORDENADAS CURVILINEAS Un sistema de coordenadas es un conjunto de valores que permiten definir unívocamente la posición de cualquier punto de un espacio geométrico respecto de un
3.1 DEFINICIÓN. Figura Nº 1. Vector
 3.1 DEFINICIÓN Un vector (A) una magnitud física caracterizable mediante un módulo y una dirección (u orientación) en el espacio. Todo vector debe tener un origen marcado (M) con un punto y un final marcado
3.1 DEFINICIÓN Un vector (A) una magnitud física caracterizable mediante un módulo y una dirección (u orientación) en el espacio. Todo vector debe tener un origen marcado (M) con un punto y un final marcado
SOLUCIONES CIRCUNFERENCIA. 1. Ecuación de la circunferencia cuyo centro es el punto (1, 2) y que pasa por el punto (2,3).
 y que pasa por el punto (2,3).") SOLUCIONES CIRCUNFERENCIA 1. Ecuación de la circunferencia cuyo centro es el punto (1,) y que pasa por el punto (,). Para determinar la ecuación de la circunferencia es necesario conocer el centro y el
SOLUCIONES CIRCUNFERENCIA 1. Ecuación de la circunferencia cuyo centro es el punto (1,) y que pasa por el punto (,). Para determinar la ecuación de la circunferencia es necesario conocer el centro y el
Cap. 24 La Ley de Gauss
 Cap. 24 La Ley de Gauss Una misma ley física enunciada desde diferentes puntos de vista Coulomb Gauss Son equivalentes Pero ambas tienen situaciones para las cuales son superiores que la otra Aquí hay
Cap. 24 La Ley de Gauss Una misma ley física enunciada desde diferentes puntos de vista Coulomb Gauss Son equivalentes Pero ambas tienen situaciones para las cuales son superiores que la otra Aquí hay
TIPOS DE RESTRICCIONES
 RESTRICCIONES: Las restricciones son reglas que determinan la posición relativa de las distintas geometrías existentes en el archivo de trabajo. Para poder aplicarlas con rigor es preciso entender el grado
RESTRICCIONES: Las restricciones son reglas que determinan la posición relativa de las distintas geometrías existentes en el archivo de trabajo. Para poder aplicarlas con rigor es preciso entender el grado
SISTEMAS DE COORDENADAS SISTEMA COORDENADO UNIDIMENSIONAL
 SISTEMAS DE COORDENADAS En la vida diaria, nos encontramos con el problema de ordenar algunos objetos; de tal manera que es necesario agruparlos, identificarlos, seleccionarlos, estereotiparlos, etc.,
SISTEMAS DE COORDENADAS En la vida diaria, nos encontramos con el problema de ordenar algunos objetos; de tal manera que es necesario agruparlos, identificarlos, seleccionarlos, estereotiparlos, etc.,
Segundo de Bachillerato Geometría en el espacio
 Segundo de Bachillerato Geometría en el espacio Jesús García de Jalón de la Fuente IES Ramiro de Maeztu Madrid 204-205. Coordenadas de un vector En el conjunto de los vectores libres del espacio el concepto
Segundo de Bachillerato Geometría en el espacio Jesús García de Jalón de la Fuente IES Ramiro de Maeztu Madrid 204-205. Coordenadas de un vector En el conjunto de los vectores libres del espacio el concepto
Muchas veces hemos visto un juego de billar y no nos percatamos de los movimientos de las bolas (ver gráfico 8). Gráfico 8
. Gráfico 8") Esta semana estudiaremos la definición de vectores y su aplicabilidad a muchas situaciones, particularmente a las relacionadas con el movimiento. Por otro lado, se podrán establecer las características
Esta semana estudiaremos la definición de vectores y su aplicabilidad a muchas situaciones, particularmente a las relacionadas con el movimiento. Por otro lado, se podrán establecer las características
GEOMETRÍA ANALÍTICA 2º Curso de Bachillerato 22 de mayo de 2008
 1. Sean los puntos A (1, 0,-1) y B (,-1, 3). Calcular la distancia del origen de coordenadas a la recta que pasa por A y B. Calculemos la recta que pasa por A y B. El vector AB es (1,-1,4) y por tanto
1. Sean los puntos A (1, 0,-1) y B (,-1, 3). Calcular la distancia del origen de coordenadas a la recta que pasa por A y B. Calculemos la recta que pasa por A y B. El vector AB es (1,-1,4) y por tanto
VECTORES. Módulo, dirección y sentido de un vector fijo En un vector fijo se llama módulo del mismo a la longitud del segmento que lo define.
 VECTORES El estudio de los vectores es uno de tantos conocimientos de las matemáticas que provienen de la física. En esta ciencia se distingue entre magnitudes escalares y magnitudes vectoriales. Se llaman
VECTORES El estudio de los vectores es uno de tantos conocimientos de las matemáticas que provienen de la física. En esta ciencia se distingue entre magnitudes escalares y magnitudes vectoriales. Se llaman
Funciones de varias variables
 Funciones de varias variables Derivadas parciales. El concepto de función derivable no se puede extender de una forma sencilla para funciones de varias variables. Aquí se emplea el concepto de diferencial
Funciones de varias variables Derivadas parciales. El concepto de función derivable no se puede extender de una forma sencilla para funciones de varias variables. Aquí se emplea el concepto de diferencial
6. VECTORES Y COORDENADAS
 6. VECTORES Y COORDENADAS Página 1 Traslaciones. Vectores Sistema de referencia. Coordenadas. Punto medio de un segmento Ecuaciones de rectas. Paralelismo. Distancias Página 2 1. TRASLACIONES. VECTORES
6. VECTORES Y COORDENADAS Página 1 Traslaciones. Vectores Sistema de referencia. Coordenadas. Punto medio de un segmento Ecuaciones de rectas. Paralelismo. Distancias Página 2 1. TRASLACIONES. VECTORES
Este documento ha sido generado para facilitar la impresión de los contenidos. Los enlaces a otras páginas no serán funcionales.
 Este documento ha sido generado para facilitar la impresión de los contenidos. Los enlaces a otras páginas no serán funcionales. Introducción Por qué La Geometría? La Geometría tiene como objetivo fundamental
Este documento ha sido generado para facilitar la impresión de los contenidos. Los enlaces a otras páginas no serán funcionales. Introducción Por qué La Geometría? La Geometría tiene como objetivo fundamental
TEMA: CAMPO ELÉCTRICO
 TEMA: CAMPO ELÉCTRICO C-J-06 Una carga puntual de valor Q ocupa la posición (0,0) del plano XY en el vacío. En un punto A del eje X el potencial es V = -120 V, y el campo eléctrico es E = -80 i N/C, siendo
TEMA: CAMPO ELÉCTRICO C-J-06 Una carga puntual de valor Q ocupa la posición (0,0) del plano XY en el vacío. En un punto A del eje X el potencial es V = -120 V, y el campo eléctrico es E = -80 i N/C, siendo
PROGRAMACIÓN LINEAL. 8.1. Introducción. 8.2. Inecuaciones lineales con 2 variables
 Capítulo 8 PROGRAMACIÓN LINEAL 8.1. Introducción La programación lineal es una técnica matemática relativamente reciente (siglo XX), que consiste en una serie de métodos y procedimientos que permiten resolver
Capítulo 8 PROGRAMACIÓN LINEAL 8.1. Introducción La programación lineal es una técnica matemática relativamente reciente (siglo XX), que consiste en una serie de métodos y procedimientos que permiten resolver
Tema 1. VECTORES (EN EL PLANO Y EN EL ESPACIO)
") Vectores Tema. VECTORES (EN EL PLANO Y EN EL ESPACIO Definición de espacio vectorial Un conjunto E es un espacio vectorial si en él se definen dos operaciones, una interna (suma y otra externa (producto
Vectores Tema. VECTORES (EN EL PLANO Y EN EL ESPACIO Definición de espacio vectorial Un conjunto E es un espacio vectorial si en él se definen dos operaciones, una interna (suma y otra externa (producto
Ejercicios de Trigonometría
 Ejercicios de Trigonometría 1) Indica la medida de estos ángulos en radianes: a) 0º b) 45º c) 60º d) 120º Recuerda que 360º son 2π radianes, con lo que para hacer la conversión realizaremos una simple
Ejercicios de Trigonometría 1) Indica la medida de estos ángulos en radianes: a) 0º b) 45º c) 60º d) 120º Recuerda que 360º son 2π radianes, con lo que para hacer la conversión realizaremos una simple
Vectores: Producto escalar y vectorial
 Nivelación de Matemática MTHA UNLP 1 Vectores: Producto escalar y vectorial Versores fundamentales Dado un sistema de coordenadas ortogonales, se considera sobre cada uno de los ejes y coincidiendo con
Nivelación de Matemática MTHA UNLP 1 Vectores: Producto escalar y vectorial Versores fundamentales Dado un sistema de coordenadas ortogonales, se considera sobre cada uno de los ejes y coincidiendo con
Vectores en el espacio
 Vectores en el espacio Un sistema de coordenadas tridimensional se construye trazando un eje Z, perpendicular en el origen de coordenadas a los ejes X e Y. Cada punto viene determinado por tres coordenadas
Vectores en el espacio Un sistema de coordenadas tridimensional se construye trazando un eje Z, perpendicular en el origen de coordenadas a los ejes X e Y. Cada punto viene determinado por tres coordenadas
IES Menéndez Tolosa. La Línea de la Concepción. 1 Es posible que un cuerpo se mueva sin que exista fuerza alguna sobre él?
 IES Menéndez Tolosa. La Línea de la Concepción 1 Es posible que un cuerpo se mueva sin que exista fuerza alguna sobre él? Si. Una consecuencia del principio de la inercia es que puede haber movimiento
IES Menéndez Tolosa. La Línea de la Concepción 1 Es posible que un cuerpo se mueva sin que exista fuerza alguna sobre él? Si. Una consecuencia del principio de la inercia es que puede haber movimiento
La magnitud vectorial mas simple es el desplazamiento (cambio de posición de un punto a otro de una partícula o de un cuerpo)
") Existen ciertas magnitudes que quedan perfectamente determinadas cuando se conoce el nombre de una unidad y el numero de veces que se ha tomado.estas unidades se llaman escalares (tiempo, volumen, longitud,
Existen ciertas magnitudes que quedan perfectamente determinadas cuando se conoce el nombre de una unidad y el numero de veces que se ha tomado.estas unidades se llaman escalares (tiempo, volumen, longitud,
TEMA 1: REPRESENTACIÓN GRÁFICA. 0.- MANEJO DE ESCUADRA Y CARTABON (Repaso 1º ESO)
") TEMA 1: REPRESENTACIÓN GRÁFICA 0.- MANEJO DE ESCUADRA Y CARTABON (Repaso 1º ESO) Son dos instrumentos de plástico transparente que se suelen usar de forma conjunta. La escuadra tiene forma de triángulo
TEMA 1: REPRESENTACIÓN GRÁFICA 0.- MANEJO DE ESCUADRA Y CARTABON (Repaso 1º ESO) Son dos instrumentos de plástico transparente que se suelen usar de forma conjunta. La escuadra tiene forma de triángulo
Tema 2. Espacios Vectoriales. 2.1. Introducción
 Tema 2 Espacios Vectoriales 2.1. Introducción Estamos habituados en diferentes cursos a trabajar con el concepto de vector. Concretamente sabemos que un vector es un segmento orientado caracterizado por
Tema 2 Espacios Vectoriales 2.1. Introducción Estamos habituados en diferentes cursos a trabajar con el concepto de vector. Concretamente sabemos que un vector es un segmento orientado caracterizado por
ESTATICA: TIPOS DE MAGNITUDES: CARACTERÍSTICAS DE UN VECTOR. Rama de la física que estudia el equilibrio de los cuerpos.
 ESTATICA: Rama de la física que estudia el equilibrio de los cuerpos. TIPOS DE MAGNITUDES: MAGNITUD ESCALAR: Es una cantidad física que se especifica por un número y una unidad. Ejemplos: La temperatura
ESTATICA: Rama de la física que estudia el equilibrio de los cuerpos. TIPOS DE MAGNITUDES: MAGNITUD ESCALAR: Es una cantidad física que se especifica por un número y una unidad. Ejemplos: La temperatura
GUIAS ÚNICAS DE LABORATORIO DE FÍSICA I ASPECTOS PRELIMINARES SUMA DE VECTORES
 GUIAS ÚNICAS DE LABORATORIO DE FÍSICA I ASPECTOS PRELIMINARES SUMA DE VECTORES SANTIAGO DE CALI UNIVERSIDAD SANTIAGO DE CALI DEPARTAMENTO DE LABORATORIOS SUMA DE VECTORES OBJETIVOS Usar la mesa de fuerzas
GUIAS ÚNICAS DE LABORATORIO DE FÍSICA I ASPECTOS PRELIMINARES SUMA DE VECTORES SANTIAGO DE CALI UNIVERSIDAD SANTIAGO DE CALI DEPARTAMENTO DE LABORATORIOS SUMA DE VECTORES OBJETIVOS Usar la mesa de fuerzas
Transformación de gráfica de funciones
 Transformación de gráfica de funciones La graficación de las funciones es como un retrato de la función. Nos auda a tener una idea de cómo transforma la función los valores que le vamos dando. A partir
Transformación de gráfica de funciones La graficación de las funciones es como un retrato de la función. Nos auda a tener una idea de cómo transforma la función los valores que le vamos dando. A partir
Lección 1-Introducción a los Polinomios y Suma y Resta de Polinomios. Dra. Noemí L. Ruiz Limardo 2009
 Lección 1-Introducción a los Polinomios y Suma y Resta de Polinomios Dra. Noemí L. Ruiz Limardo 2009 Objetivos de la Lección Al finalizar esta lección los estudiantes: Identificarán, de una lista de expresiones
Lección 1-Introducción a los Polinomios y Suma y Resta de Polinomios Dra. Noemí L. Ruiz Limardo 2009 Objetivos de la Lección Al finalizar esta lección los estudiantes: Identificarán, de una lista de expresiones
Actividades recreativas para recordar a los vectores. 1) Representa en un eje de coordenadas las siguientes sugerencias:
 Representa en un eje de coordenadas las siguientes sugerencias:") Actividades recreativas para recordar a los vectores 1) Representa en un eje de coordenadas las siguientes sugerencias: a) Dibuja un segmento y oriéntalo en sentido positivo. b) Dibuja un segmento y oriéntalo
Actividades recreativas para recordar a los vectores 1) Representa en un eje de coordenadas las siguientes sugerencias: a) Dibuja un segmento y oriéntalo en sentido positivo. b) Dibuja un segmento y oriéntalo
PROBLEMAS MÉTRICOS. Página 183 REFLEXIONA Y RESUELVE. Diagonal de un ortoedro. Distancia entre dos puntos. Distancia de un punto a una recta
 PROBLEMAS MÉTRICOS Página 3 REFLEXIONA Y RESUELVE Diagonal de un ortoedro Halla la diagonal de los ortoedros cuyas dimensiones son las siguientes: I) a =, b =, c = II) a = 4, b =, c = 3 III) a =, b = 4,
PROBLEMAS MÉTRICOS Página 3 REFLEXIONA Y RESUELVE Diagonal de un ortoedro Halla la diagonal de los ortoedros cuyas dimensiones son las siguientes: I) a =, b =, c = II) a = 4, b =, c = 3 III) a =, b = 4,
I.E.S. ANDRÉS DE VANDELVIRA DEPARTAMENTO DE TECNOLOGÍA SISTEMAS DE REPRESENTACIÓN GRÁFICA: PERSPECTIVA. J.Garrigós
 I.E.S. ANDRÉS DE VANDELVIRA DEPARTAMENTO DE TECNOLOGÍA J.Garrigós I.E.S. ANDRÉS DE VANDELVIRA DEPARTAMENTO DE TECNOLOGÍA 1 1.INTRODUCCIÓN Los sistemas de representación en perspectiva, tienen como objetivo
I.E.S. ANDRÉS DE VANDELVIRA DEPARTAMENTO DE TECNOLOGÍA J.Garrigós I.E.S. ANDRÉS DE VANDELVIRA DEPARTAMENTO DE TECNOLOGÍA 1 1.INTRODUCCIÓN Los sistemas de representación en perspectiva, tienen como objetivo
LÍMITES Y CONTINUIDAD DE FUNCIONES
 Capítulo 9 LÍMITES Y CONTINUIDAD DE FUNCIONES 9.. Introducción El concepto de ite en Matemáticas tiene el sentido de lugar hacia el que se dirige una función en un determinado punto o en el infinito. Veamos
Capítulo 9 LÍMITES Y CONTINUIDAD DE FUNCIONES 9.. Introducción El concepto de ite en Matemáticas tiene el sentido de lugar hacia el que se dirige una función en un determinado punto o en el infinito. Veamos
LINEAS EQUIPOTENCIALES
 LINEAS EQUIPOTENCIALES Construcción de líneas equipotenciales. Visualización del campo eléctrico y del potencial eléctrico. Análisis del movimiento de cargas eléctricas en presencia de campos eléctricos.
LINEAS EQUIPOTENCIALES Construcción de líneas equipotenciales. Visualización del campo eléctrico y del potencial eléctrico. Análisis del movimiento de cargas eléctricas en presencia de campos eléctricos.
Programa Tracker : Cómo generar Vectores y sumarlos
 Programa Tracker : Cómo generar Vectores y sumarlos Esta guía explica cómo usar vectores, la posibilidad de sumarlos, presentar los resultados directamente en pantalla y compararlos de forma gráfica y
Programa Tracker : Cómo generar Vectores y sumarlos Esta guía explica cómo usar vectores, la posibilidad de sumarlos, presentar los resultados directamente en pantalla y compararlos de forma gráfica y
El espacio tridimensional. Tema 01: Álgebra lineal y geometría en R 3. Vectores. El producto punto o producto escalar. Teorema
 El espacio tridimensional Tema 01: Álgebra lineal y geometría en R 3 Juan Ignacio Del Valle Gamboa Sede de Guanacaste Universidad de Costa Rica Ciclo I - 2014 Partimos de los conceptos de punto y vector.
El espacio tridimensional Tema 01: Álgebra lineal y geometría en R 3 Juan Ignacio Del Valle Gamboa Sede de Guanacaste Universidad de Costa Rica Ciclo I - 2014 Partimos de los conceptos de punto y vector.
Tutorial: Utilización del Mapa de normales, para modificar iluminación virtual.
 El propósito de este tutorial es el enseñar como utilizar en PhotoShop (PS), el mapa de normales que se obtiene de la mayoría de los motores de renderizado. Para con ello lograr, entre otras muchas aplicaciones,
El propósito de este tutorial es el enseñar como utilizar en PhotoShop (PS), el mapa de normales que se obtiene de la mayoría de los motores de renderizado. Para con ello lograr, entre otras muchas aplicaciones,
En la siguiente gráfica se muestra una función lineal y lo que representa m y b.
 FUNCIÓN LINEAL. La función lineal o de primer grado es aquella que se representa gráficamente por medio de una línea recta. Dicha función tiene una ecuación lineal de la forma f()= =m+b, en donde m b son
FUNCIÓN LINEAL. La función lineal o de primer grado es aquella que se representa gráficamente por medio de una línea recta. Dicha función tiene una ecuación lineal de la forma f()= =m+b, en donde m b son
A continuación voy a colocar las fuerzas que intervienen en nuestro problema.
 ísica EL PLANO INCLINADO Supongamos que tenemos un plano inclinado. Sobre él colocamos un cubo, de manera que se deslice sobre la superficie hasta llegar al plano horizontal. Vamos a suponer que tenemos
ísica EL PLANO INCLINADO Supongamos que tenemos un plano inclinado. Sobre él colocamos un cubo, de manera que se deslice sobre la superficie hasta llegar al plano horizontal. Vamos a suponer que tenemos
BASES Y DIMENSIÓN. Propiedades de las bases. Ejemplos de bases.
 BASES Y DIMENSIÓN Definición: Base. Se llama base de un espacio (o subespacio) vectorial a un sistema generador de dicho espacio o subespacio, que sea a la vez linealmente independiente. β Propiedades
BASES Y DIMENSIÓN Definición: Base. Se llama base de un espacio (o subespacio) vectorial a un sistema generador de dicho espacio o subespacio, que sea a la vez linealmente independiente. β Propiedades
Funciones más usuales 1
 Funciones más usuales 1 1. La función constante Funciones más usuales La función constante Consideremos la función más sencilla, por ejemplo. La imagen de cualquier número es siempre 2. Si hacemos una
Funciones más usuales 1 1. La función constante Funciones más usuales La función constante Consideremos la función más sencilla, por ejemplo. La imagen de cualquier número es siempre 2. Si hacemos una
Líneas Equipotenciales
 Líneas Equipotenciales A.M. Velasco (133384) J.P. Soler (133380) O.A. Botina (133268) Departamento de física, facultad de ciencias, Universidad Nacional de Colombia Resumen. En esta experiencia se estudia
Líneas Equipotenciales A.M. Velasco (133384) J.P. Soler (133380) O.A. Botina (133268) Departamento de física, facultad de ciencias, Universidad Nacional de Colombia Resumen. En esta experiencia se estudia
Funciones de dos variables. Gráficas y superficies.
 Univ. de Alcalá de Henares Ingeniería de Telecomunicación Cálculo. Segundo parcial. Curso 2004-2005 Funciones de dos variables. Gráficas y superficies. Puede ser conveniente la visualización en pantalla
Univ. de Alcalá de Henares Ingeniería de Telecomunicación Cálculo. Segundo parcial. Curso 2004-2005 Funciones de dos variables. Gráficas y superficies. Puede ser conveniente la visualización en pantalla
Vectores. Las cantidades físicas que estudiaremos en los cursos de física son escalares o vectoriales.
 Cantidades vectoriales escalares Vectores Las cantidades físicas que estudiaremos en los cursos de física son escalares o vectoriales. Una cantidad escalar es la que está especificada completamente por
Cantidades vectoriales escalares Vectores Las cantidades físicas que estudiaremos en los cursos de física son escalares o vectoriales. Una cantidad escalar es la que está especificada completamente por
CÁLCULO PARA LA INGENIERÍA 1
 CÁLCULO PARA LA INGENIERÍA 1 PROBLEMAS RESUELTOS Tema 3 Derivación de funciones de varias variables 3.1 Derivadas y diferenciales de funciones de varias variables! 1. Derivadas parciales de primer orden.!
CÁLCULO PARA LA INGENIERÍA 1 PROBLEMAS RESUELTOS Tema 3 Derivación de funciones de varias variables 3.1 Derivadas y diferenciales de funciones de varias variables! 1. Derivadas parciales de primer orden.!
1 Estática Básica Prohibida su reproducción sin autorización. CONCEPTOS DE FISICA MECANICA. Conceptos de Física Mecánica
 1 CONCEPTOS DE FISICA MECANICA Introducción La parte de la física mecánica se puede dividir en tres grandes ramas de acuerdo a lo que estudia cada una de ellas. Así, podemos clasificarlas según lo siguiente:
1 CONCEPTOS DE FISICA MECANICA Introducción La parte de la física mecánica se puede dividir en tres grandes ramas de acuerdo a lo que estudia cada una de ellas. Así, podemos clasificarlas según lo siguiente:
FUNCIONES CUADRÁTICAS Y RACIONALES
 www.matesronda.net José A. Jiménez Nieto FUNCIONES CUADRÁTICAS Y RACIONALES 1. FUNCIONES CUADRÁTICAS. Representemos, en función de la longitud de la base (), el área (y) de todos los rectángulos de perímetro
www.matesronda.net José A. Jiménez Nieto FUNCIONES CUADRÁTICAS Y RACIONALES 1. FUNCIONES CUADRÁTICAS. Representemos, en función de la longitud de la base (), el área (y) de todos los rectángulos de perímetro
I. RELACIONES Y FUNCIONES 1.1. PRODUCTO CARTESIANO { }
 I. RELACIONES Y FUNCIONES PAREJAS ORDENADAS Una pareja ordenada se compone de dos elementos x y y, escribiéndose ( x, y ) donde x es el primer elemento y y el segundo elemento. Teniéndose que dos parejas
I. RELACIONES Y FUNCIONES PAREJAS ORDENADAS Una pareja ordenada se compone de dos elementos x y y, escribiéndose ( x, y ) donde x es el primer elemento y y el segundo elemento. Teniéndose que dos parejas
CAPÍTULO VI PREPARACIÓN DEL MODELO EN ALGOR. En este capítulo, se hablará acerca de los pasos a seguir para poder realizar el análisis de
 CAPÍTULO VI PREPARACIÓN DEL MODELO EN ALGOR. En este capítulo, se hablará acerca de los pasos a seguir para poder realizar el análisis de cualquier modelo en el software Algor. La preparación de un modelo,
CAPÍTULO VI PREPARACIÓN DEL MODELO EN ALGOR. En este capítulo, se hablará acerca de los pasos a seguir para poder realizar el análisis de cualquier modelo en el software Algor. La preparación de un modelo,
4º ESO 1. ECUAC. 2º GRADO Y UNA INCÓGNITA
 4º ESO 1. ECUAC. 2º GRADO Y UNA INCÓGNITA Una ecuación con una incógnita es de segundo grado si el exponente de la incógnita es dos. Ecuaciones de segundo grado con una incógnita son: Esta última ecuación
4º ESO 1. ECUAC. 2º GRADO Y UNA INCÓGNITA Una ecuación con una incógnita es de segundo grado si el exponente de la incógnita es dos. Ecuaciones de segundo grado con una incógnita son: Esta última ecuación
Sistemas de vectores deslizantes
 Capítulo 1 Sistemas de vectores deslizantes 1.1. Vectores. Álgebra vectorial. En Física, se denomina magnitud fsica (o simplemente, magnitud) a todo aquello que es susceptible de ser cuantificado o medido
Capítulo 1 Sistemas de vectores deslizantes 1.1. Vectores. Álgebra vectorial. En Física, se denomina magnitud fsica (o simplemente, magnitud) a todo aquello que es susceptible de ser cuantificado o medido
RECTAS Y PLANOS EN EL ESPACIO
 UNIDAD 6 RECTA Y PLANO EN EL EPACIO Página 1 1. Puntos alineados en el plano Comprueba que los puntos A (, ), B (8, ) y C (1, ) no están alineados. A (, ) B (8, ) C (1, ) AB = (, 1); BC = (, ) No tienen
UNIDAD 6 RECTA Y PLANO EN EL EPACIO Página 1 1. Puntos alineados en el plano Comprueba que los puntos A (, ), B (8, ) y C (1, ) no están alineados. A (, ) B (8, ) C (1, ) AB = (, 1); BC = (, ) No tienen
Matrices equivalentes. El método de Gauss
 Matrices equivalentes. El método de Gauss Dada una matriz A cualquiera decimos que B es equivalente a A si podemos transformar A en B mediante una combinación de las siguientes operaciones: Multiplicar
Matrices equivalentes. El método de Gauss Dada una matriz A cualquiera decimos que B es equivalente a A si podemos transformar A en B mediante una combinación de las siguientes operaciones: Multiplicar
Actividades con GeoGebra
 Conectar Igualdad - "Netbooks Uno a Uno" Actividades con GeoGebra Nociones básicas, rectas Silvina Ponce Dawson Introducción. El GeoGeobra es un programa que permite explorar nociones matemáticas desde
Conectar Igualdad - "Netbooks Uno a Uno" Actividades con GeoGebra Nociones básicas, rectas Silvina Ponce Dawson Introducción. El GeoGeobra es un programa que permite explorar nociones matemáticas desde
UNIDAD 4: PLANO CARTESIANO, RELACIONES Y FUNCIONES. OBJETIVO DE APRENDIZAJE: Representar gráficamente relaciones y funciones en el plano cartesiano.
 UNIDAD 4: PLANO CARTESIANO, RELACIONES Y FUNCIONES OBJETIVO DE APRENDIZAJE: Representar gráficamente relaciones y funciones en el plano cartesiano. EL PLANO CARTESIANO. El plano cartesiano está formado
UNIDAD 4: PLANO CARTESIANO, RELACIONES Y FUNCIONES OBJETIVO DE APRENDIZAJE: Representar gráficamente relaciones y funciones en el plano cartesiano. EL PLANO CARTESIANO. El plano cartesiano está formado
TEMA 5 RESOLUCIÓN DE CIRCUITOS
 TEMA 5 RESOLUCIÓN DE CIRCUITOS RESOLUCIÓN DE CIRCUITOS POR KIRCHHOFF Para poder resolver circuitos por Kirchhoff debemos determinar primeros los conceptos de malla, rama y nudo. Concepto de malla: Se llama
TEMA 5 RESOLUCIÓN DE CIRCUITOS RESOLUCIÓN DE CIRCUITOS POR KIRCHHOFF Para poder resolver circuitos por Kirchhoff debemos determinar primeros los conceptos de malla, rama y nudo. Concepto de malla: Se llama
Operaciones Booleanas y Compuertas Básicas
 Álgebra de Boole El álgebra booleana es la teoría matemática que se aplica en la lógica combinatoria. Las variables booleanas son símbolos utilizados para representar magnitudes lógicas y pueden tener
Álgebra de Boole El álgebra booleana es la teoría matemática que se aplica en la lógica combinatoria. Las variables booleanas son símbolos utilizados para representar magnitudes lógicas y pueden tener
MATEMÁTICAS para estudiantes de primer curso de facultades y escuelas técnicas
 Universidad de Cádiz Departamento de Matemáticas MATEMÁTICAS para estudiantes de primer curso de facultades y escuelas técnicas Tema 4 La recta en el plano Elaborado por la Profesora Doctora María Teresa
Universidad de Cádiz Departamento de Matemáticas MATEMÁTICAS para estudiantes de primer curso de facultades y escuelas técnicas Tema 4 La recta en el plano Elaborado por la Profesora Doctora María Teresa
Geometría analítica. Impreso por Juan Carlos Vila Vilariño Centro I.E.S. PASTORIZA
 Conoce los vectores, sus componentes y las operaciones que se pueden realizar con ellos. Aprende cómo se representan las rectas y sus posiciones relativas. Impreso por Juan Carlos Vila Vilariño Centro
Conoce los vectores, sus componentes y las operaciones que se pueden realizar con ellos. Aprende cómo se representan las rectas y sus posiciones relativas. Impreso por Juan Carlos Vila Vilariño Centro
Unidad V: Integración
 Unidad V: Integración 5.1 Introducción La integración es un concepto fundamental de las matemáticas avanzadas, especialmente en los campos del cálculo y del análisis matemático. Básicamente, una integral
Unidad V: Integración 5.1 Introducción La integración es un concepto fundamental de las matemáticas avanzadas, especialmente en los campos del cálculo y del análisis matemático. Básicamente, una integral
INTERACCIÓN DE UNA CIMENTACIÓN PROFUNDA CON LA ESTRUCTURA
 INTERACCIÓN DE UNA CIMENTACIÓN PROFUNDA CON LA ESTRUCTURA Fernando MUZÁS LABAD, Doctor Ingeniero de Caminos Canales y Puertos Profesor Titular de Mecánica del Suelo ETSAM RESUMEN En el presente artículo
INTERACCIÓN DE UNA CIMENTACIÓN PROFUNDA CON LA ESTRUCTURA Fernando MUZÁS LABAD, Doctor Ingeniero de Caminos Canales y Puertos Profesor Titular de Mecánica del Suelo ETSAM RESUMEN En el presente artículo
AXIOMAS DE CUERPO (CAMPO) DE LOS NÚMEROS REALES
 DE LOS NÚMEROS REALES") AXIOMASDECUERPO(CAMPO) DELOSNÚMEROSREALES Ejemplo: 6 INECUACIONES 15 VA11) x y x y. VA12) x y x y. Las demostraciones de muchas de estas propiedades son evidentes de la definición. Otras se demostrarán
AXIOMASDECUERPO(CAMPO) DELOSNÚMEROSREALES Ejemplo: 6 INECUACIONES 15 VA11) x y x y. VA12) x y x y. Las demostraciones de muchas de estas propiedades son evidentes de la definición. Otras se demostrarán
PARÁBOLA. 1) para la parte positiva: 2) para la parte negativa: 3) para la parte positiva: 4) para la parte negativa:
 para la parte positiva: 2) para la parte negativa: 3) para la parte positiva: 4) para la parte negativa:") Página 90 5 LA PARÁBOLA 5.1 DEFINICIONES La parábola es el lugar geométrico 4 de todos los puntos cuyas distancias a una recta fija, llamada, y a un punto fijo, llamado foco, son iguales entre sí. Hay
Página 90 5 LA PARÁBOLA 5.1 DEFINICIONES La parábola es el lugar geométrico 4 de todos los puntos cuyas distancias a una recta fija, llamada, y a un punto fijo, llamado foco, son iguales entre sí. Hay
TEORÍA TEMA 9. 2. Definición de ESFUERZOS CARACTERÍSTICOS ( Mf.; Q; N)
") 1. Definición de Viga de alma llena TEORÍA TEMA 9 2. Definición de ESFUERZOS CARACTERÍSTICOS ( Mf.; Q; N) 3. Determinación de los esfuerzos característicos i. Concepto de Polígonos de Presiones ii. Caso
1. Definición de Viga de alma llena TEORÍA TEMA 9 2. Definición de ESFUERZOS CARACTERÍSTICOS ( Mf.; Q; N) 3. Determinación de los esfuerzos característicos i. Concepto de Polígonos de Presiones ii. Caso
La derivada de y respecto a x es lo que varía y por cada unidad que varía x. Ese valor se designa por dy dx.
 Conceptos de derivada y de diferencial Roberto C. Redondo Melchor, Norberto Redondo Melchor, Félix Redondo Quintela 1 Universidad de Salamanca 18 de agosto de 2012 v1.3: 17 de septiembre de 2012 Aunque
Conceptos de derivada y de diferencial Roberto C. Redondo Melchor, Norberto Redondo Melchor, Félix Redondo Quintela 1 Universidad de Salamanca 18 de agosto de 2012 v1.3: 17 de septiembre de 2012 Aunque
KIG: LA GEOMETRÍA A GOLPE DE RATÓN. Asesor de Tecnologías de la Información y de las Comunicaciones
 KIG: LA GEOMETRÍA A GOLPE DE RATÓN Asesor de Tecnologías de la Información y de las Comunicaciones GNU/LINEX Mariano Real Pérez KIG KDE Interactive geometry (Geometría interactiva de KDE) es una aplicación
KIG: LA GEOMETRÍA A GOLPE DE RATÓN Asesor de Tecnologías de la Información y de las Comunicaciones GNU/LINEX Mariano Real Pérez KIG KDE Interactive geometry (Geometría interactiva de KDE) es una aplicación
Recordando la experiencia
 Recordando la experiencia En el Taller de Relojes de Sol aprendimos a construir uno de los instrumentos de medición del tiempo más antiguos del mundo. Se basa en la observación de la sombra que crea sobre
Recordando la experiencia En el Taller de Relojes de Sol aprendimos a construir uno de los instrumentos de medición del tiempo más antiguos del mundo. Se basa en la observación de la sombra que crea sobre
APUNTES DE MATEMÁTICAS TEMA 4: VECTORES 1º BACHILLERATO
 APUNTES DE MATEMÁTICAS TEMA 4: VECTORES 1º BACHILLERATO ÍNDICE VECTORES EN EL PLANO... 3 Vector Fijo... 3 VECTOR LIBRE... 3 Operaciones con Vectores... 3 Suma de vectores... 3 Producto de un número por
APUNTES DE MATEMÁTICAS TEMA 4: VECTORES 1º BACHILLERATO ÍNDICE VECTORES EN EL PLANO... 3 Vector Fijo... 3 VECTOR LIBRE... 3 Operaciones con Vectores... 3 Suma de vectores... 3 Producto de un número por
Funciones polinomiales de grados 3 y 4
 Funciones polinomiales de grados 3 y 4 Ahora vamos a estudiar los casos de funciones polinomiales de grados tres y cuatro. Vamos a empezar con sus gráficas y después vamos a estudiar algunos resultados
Funciones polinomiales de grados 3 y 4 Ahora vamos a estudiar los casos de funciones polinomiales de grados tres y cuatro. Vamos a empezar con sus gráficas y después vamos a estudiar algunos resultados
Colegio Las Tablas Tarea de verano Matemáticas 3º ESO
 Colegio Las Tablas Tarea de verano Matemáticas º ESO Nombre: C o l e g i o L a s T a b l a s Tarea de verano Matemáticas º ESO Resolver la siguiente ecuación: 5 5 6 Multiplicando por el mcm(,,6) = 6 y
Colegio Las Tablas Tarea de verano Matemáticas º ESO Nombre: C o l e g i o L a s T a b l a s Tarea de verano Matemáticas º ESO Resolver la siguiente ecuación: 5 5 6 Multiplicando por el mcm(,,6) = 6 y
1.4.- D E S I G U A L D A D E S
 1.4.- D E S I G U A L D A D E S OBJETIVO: Que el alumno conozca y maneje las reglas empleadas en la resolución de desigualdades y las use para determinar el conjunto solución de una desigualdad dada y
1.4.- D E S I G U A L D A D E S OBJETIVO: Que el alumno conozca y maneje las reglas empleadas en la resolución de desigualdades y las use para determinar el conjunto solución de una desigualdad dada y
TRANSFORMACIONES ISOMÉTRICAS
 TRANSFORMACIONES ISOMÉTRICAS En una transformación isométrica: 1) No se altera la forma ni el tamaño de la figura. 2) Sólo cambia la posición (orientación o sentido de ésta). TRANSFORMACIONES ISOMÉTRICAS
TRANSFORMACIONES ISOMÉTRICAS En una transformación isométrica: 1) No se altera la forma ni el tamaño de la figura. 2) Sólo cambia la posición (orientación o sentido de ésta). TRANSFORMACIONES ISOMÉTRICAS
Juan Antonio González Mota Profesor de Matemáticas del Colegio Juan XIII Zaidín de Granada
 FUNCIONES CONOCIDAS. FUNCIONES LINEALES. Se llaman funciones lineales a aquellas que se representan mediante rectas. Su epresión en forma eplícita es y f ( ) a b. En sentido más estricto, se llaman funciones
FUNCIONES CONOCIDAS. FUNCIONES LINEALES. Se llaman funciones lineales a aquellas que se representan mediante rectas. Su epresión en forma eplícita es y f ( ) a b. En sentido más estricto, se llaman funciones
Aproximación local. Plano tangente. Derivadas parciales.
 Univ. de Alcalá de Henares Ingeniería de Telecomunicación Cálculo. Segundo parcial. Curso 004-005 Aproximación local. Plano tangente. Derivadas parciales. 1. Plano tangente 1.1. El problema de la aproximación
Univ. de Alcalá de Henares Ingeniería de Telecomunicación Cálculo. Segundo parcial. Curso 004-005 Aproximación local. Plano tangente. Derivadas parciales. 1. Plano tangente 1.1. El problema de la aproximación
Esta es la forma vectorial de la recta. Si desarrollamos las dos posibles ecuaciones, tendremos las ecuaciones paramétricas de la recta:
 Todo el mundo sabe que dos puntos definen una recta, pero los matemáticos son un poco diferentes y, aún aceptando la máxima universal, ellos prefieren decir que un punto y un vector nos definen una recta.
Todo el mundo sabe que dos puntos definen una recta, pero los matemáticos son un poco diferentes y, aún aceptando la máxima universal, ellos prefieren decir que un punto y un vector nos definen una recta.
RELOJ SOLAR HORIZONTAL Esteban Esteban Atrévete con el Universo
 RELOJ SOLAR HORIZONTAL Esteban Esteban Atrévete con el Universo Características y ventajas de este tipo de reloj Está claro que si se va a trabajar en la escuela con relojes solares, el primer paso debe
RELOJ SOLAR HORIZONTAL Esteban Esteban Atrévete con el Universo Características y ventajas de este tipo de reloj Está claro que si se va a trabajar en la escuela con relojes solares, el primer paso debe
Entonces el trabajo de la fuerza eléctrica es : =F d (positivo porque la carga se desplaza en el sentido en que actúa la fuerza (de A a B)
") Consideremos la siguiente situación. Una carga Q que genera un campo eléctrico uniforme, y sobre este campo eléctrico se ubica una carga puntual q.de tal manara que si las cargas son de igual signo la
Consideremos la siguiente situación. Una carga Q que genera un campo eléctrico uniforme, y sobre este campo eléctrico se ubica una carga puntual q.de tal manara que si las cargas son de igual signo la
UNIVERSIDAD COMPLUTENSE DE MADRID
 TIEMPO: INSTRUCCIONES GENERALES Y VALORACIÓN 120 minutos INSTRUCCIONES: La prueba consiste en la realización de cinco ejercicios, a elegir entre dos opciones, denominadas A y B. El alumno realizará una
TIEMPO: INSTRUCCIONES GENERALES Y VALORACIÓN 120 minutos INSTRUCCIONES: La prueba consiste en la realización de cinco ejercicios, a elegir entre dos opciones, denominadas A y B. El alumno realizará una
35 Facultad de Ciencias Universidad de Los Andes Mérida-Venezuela. Potencial Eléctrico
 q 1 q 2 Prof. Félix Aguirre 35 Energía Electrostática Potencial Eléctrico La interacción electrostática es representada muy bien a través de la ley de Coulomb, esto es: mediante fuerzas. Existen, sin embargo,
q 1 q 2 Prof. Félix Aguirre 35 Energía Electrostática Potencial Eléctrico La interacción electrostática es representada muy bien a través de la ley de Coulomb, esto es: mediante fuerzas. Existen, sin embargo,
ESTATICA. Componentes ortogonales de una fuerza. Seminario Universitario Física
 ESTATICA Es la parte de la física que estudia las fuerzas en equilibrio. Si sobre un cuerpo no actúan fuerzas o actúan varias fuerzas cuya resultante es cero, decimos que el cuerpo está en equilibrio.
ESTATICA Es la parte de la física que estudia las fuerzas en equilibrio. Si sobre un cuerpo no actúan fuerzas o actúan varias fuerzas cuya resultante es cero, decimos que el cuerpo está en equilibrio.
1. Trabajo y energía TRABAJO HECHO POR UNA FUERZA CONSTANTE
 Trabajo y energía 1. Trabajo y energía Hasta ahora hemos estudiado el movimiento traslacional de un objeto en términos de las tres leyes de Newton. En este análisis la fuerza ha jugado un papel central.
Trabajo y energía 1. Trabajo y energía Hasta ahora hemos estudiado el movimiento traslacional de un objeto en términos de las tres leyes de Newton. En este análisis la fuerza ha jugado un papel central.
Nivelación de Matemática MTHA UNLP 1. Vectores
 Nivelación de Matemática MTHA UNLP 1 1. Definiciones básicas Vectores 1.1. Magnitudes escalares y vectoriales. Hay magnitudes que quedan determinadas dando un solo número real: su medida. Por ejemplo:
Nivelación de Matemática MTHA UNLP 1 1. Definiciones básicas Vectores 1.1. Magnitudes escalares y vectoriales. Hay magnitudes que quedan determinadas dando un solo número real: su medida. Por ejemplo:
UNIDAD 6. POLINOMIOS CON COEFICIENTES ENTEROS
 UNIDAD 6. POLINOMIOS CON COEFICIENTES ENTEROS Unidad 6: Polinomios con coeficientes enteros. Al final deberás haber aprendido... Expresar algebraicamente enunciados sencillos. Extraer enunciados razonables
UNIDAD 6. POLINOMIOS CON COEFICIENTES ENTEROS Unidad 6: Polinomios con coeficientes enteros. Al final deberás haber aprendido... Expresar algebraicamente enunciados sencillos. Extraer enunciados razonables
DIBUJO TÉCNICO. UNIDAD DIDÁCTICA 9: Geometría 2D (V)
") UNIDAD DIDÁCTICA 9: Geometría 2D (V) ÍNDICE Página: 1 CURVAS CÓNICAS. ELEMENTOS CARACTERÍSTICOS.. 2 2 TRAZADO MEDIANTE RADIOS VECTORES 4 3 RECTAS TANGENTES A CÓNICAS 5 3.1 CIRCUNFERENCIAS FOCALES 6 3.2
UNIDAD DIDÁCTICA 9: Geometría 2D (V) ÍNDICE Página: 1 CURVAS CÓNICAS. ELEMENTOS CARACTERÍSTICOS.. 2 2 TRAZADO MEDIANTE RADIOS VECTORES 4 3 RECTAS TANGENTES A CÓNICAS 5 3.1 CIRCUNFERENCIAS FOCALES 6 3.2
Funciones, x, y, gráficos
 Funciones, x, y, gráficos Vamos a ver los siguientes temas: funciones, definición, dominio, codominio, imágenes, gráficos, y algo más. Recordemos el concepto de función: Una función es una relación entre
Funciones, x, y, gráficos Vamos a ver los siguientes temas: funciones, definición, dominio, codominio, imágenes, gráficos, y algo más. Recordemos el concepto de función: Una función es una relación entre
Se llama dominio de una función f(x) a todos los valores de x para los que f(x) existe. El dominio se denota como Dom(f)
 a todos los valores de x para los que f(x) existe. El dominio se denota como Dom(f)") MATEMÁTICAS EJERCICIOS RESUELTOS DE FUNCIONES FUNCIONES A. Introducción teórica A.1. Definición de función A.. Dominio y recorrido de una función, f() A.. Crecimiento y decrecimiento de una función en
MATEMÁTICAS EJERCICIOS RESUELTOS DE FUNCIONES FUNCIONES A. Introducción teórica A.1. Definición de función A.. Dominio y recorrido de una función, f() A.. Crecimiento y decrecimiento de una función en
Lección 7 - Coordenadas rectangulares y gráficas
 Lección 7 - Coordenadas rectangulares gráficas Coordenadas rectangulares gráficas Objetivos: Al terminar esta lección podrás usar un sistema de coordenadas rectangulares para identificar puntos en un plano
Lección 7 - Coordenadas rectangulares gráficas Coordenadas rectangulares gráficas Objetivos: Al terminar esta lección podrás usar un sistema de coordenadas rectangulares para identificar puntos en un plano
Aplicaciones Lineales
 Aplicaciones Lineales Ejercicio Dada la matriz A = 0 2 0 a) Escribir explícitamente la aplicación lineal f : 2 cuya matriz asociada con respecto a las bases canónicas es A. En primer lugar definimos las
Aplicaciones Lineales Ejercicio Dada la matriz A = 0 2 0 a) Escribir explícitamente la aplicación lineal f : 2 cuya matriz asociada con respecto a las bases canónicas es A. En primer lugar definimos las
1. Dominio, simetría, puntos de corte y periodicidad
 Estudio y representación de funciones 1. Dominio, simetría, puntos de corte y periodicidad 1.1. Dominio Al conjunto de valores de x para los cuales está definida la función se le denomina dominio. Se suele
Estudio y representación de funciones 1. Dominio, simetría, puntos de corte y periodicidad 1.1. Dominio Al conjunto de valores de x para los cuales está definida la función se le denomina dominio. Se suele
Electrostática: ejercicios resueltos
 Electrostática: ejercicios resueltos 1) Dos cargas de 4 y 9 microculombios se hallan situadas en los puntos (2,0) y (4,0) del eje 0X. Calcula el campo y el potencial eléctrico en el punto medio. 2) Dos
Electrostática: ejercicios resueltos 1) Dos cargas de 4 y 9 microculombios se hallan situadas en los puntos (2,0) y (4,0) del eje 0X. Calcula el campo y el potencial eléctrico en el punto medio. 2) Dos
Anexo 1: Demostraciones
 75 Matemáticas I : Álgebra Lineal Anexo 1: Demostraciones Espacios vectoriales Demostración de: Propiedades 89 de la página 41 Propiedades 89- Algunas propiedades que se deducen de las anteriores son:
75 Matemáticas I : Álgebra Lineal Anexo 1: Demostraciones Espacios vectoriales Demostración de: Propiedades 89 de la página 41 Propiedades 89- Algunas propiedades que se deducen de las anteriores son:
MATEMÁTICAS para estudiantes de primer curso de facultades y escuelas técnicas
 Universidad de Cádiz Departamento de Matemáticas MATEMÁTICAS para estudiantes de primer curso de facultades y escuelas técnicas Tema Representación gráfica de funciones reales de una variable real Elaborado
Universidad de Cádiz Departamento de Matemáticas MATEMÁTICAS para estudiantes de primer curso de facultades y escuelas técnicas Tema Representación gráfica de funciones reales de una variable real Elaborado
La Lección de hoy es sobre determinar el Dominio y el Rango. El cuál es la expectativa para el aprendizaje del estudiante LF.3.A1.
 LF.3.A1.2-Steve Cole-Determining Domain and Ranges- La Lección de hoy es sobre determinar el Dominio y el Rango. El cuál es la expectativa para el aprendizaje del estudiante LF.3.A1.2 Qué es Dominio? Es
LF.3.A1.2-Steve Cole-Determining Domain and Ranges- La Lección de hoy es sobre determinar el Dominio y el Rango. El cuál es la expectativa para el aprendizaje del estudiante LF.3.A1.2 Qué es Dominio? Es
TEMA 1: DISEÑO Y DIBUJO DE OBJETOS.
 TEMA 1: DISEÑO Y DIBUJO DE OBJETOS. Francisco Raposo Tecnología 3ºESO 1. LA REPRESENTACIÓN DE OBJETOS 1.1.EL DIBUJO TÉCNICO Es una de las técnicas que se utilizan para describir un objeto, con la intención
TEMA 1: DISEÑO Y DIBUJO DE OBJETOS. Francisco Raposo Tecnología 3ºESO 1. LA REPRESENTACIÓN DE OBJETOS 1.1.EL DIBUJO TÉCNICO Es una de las técnicas que se utilizan para describir un objeto, con la intención
Física de los Procesos Biológicos Curso 2005/6
 Bibliografía: ísica, Kane, Tema 8 ísica de los Procesos Biológicos Curso 2005/6 Grupo 3 TEMA 2 BIOMECÁNICA 2.1 SÓIDO DEORMABE Parte 1 Introducción Vamos a estudiar como los materiales se deforman debido
Bibliografía: ísica, Kane, Tema 8 ísica de los Procesos Biológicos Curso 2005/6 Grupo 3 TEMA 2 BIOMECÁNICA 2.1 SÓIDO DEORMABE Parte 1 Introducción Vamos a estudiar como los materiales se deforman debido
Hallar gráfica y analíticamente la resultante de los siguientes desplazamientos: hacia el Noroeste), B. (35 m Sur)
, B. (35 m Sur)") VECTORES: OPERACIONES BÁSICAS Hallar gráfica y analíticamente la resultante de los siguientes desplazamientos: hacia el Noroeste), B (0 m Este 30º Norte) y C (35 m Sur) Solución: I.T.I. 94, I.T.T. 05 A
VECTORES: OPERACIONES BÁSICAS Hallar gráfica y analíticamente la resultante de los siguientes desplazamientos: hacia el Noroeste), B (0 m Este 30º Norte) y C (35 m Sur) Solución: I.T.I. 94, I.T.T. 05 A
PROBLEMA 1. 1. [1.5 puntos] Obtener la ecuación de la recta tangente en el punto ( 2, 1) a la curva dada implícitamente por y 3 +3y 2 = x 4 3x 2.
![PROBLEMA 1. 1. [1.5 puntos] Obtener la ecuación de la recta tangente en el punto ( 2, 1) a la curva dada implícitamente por y 3 +3y 2 = x 4 3x 2.](/thumbs/27/11795036.jpg "PROBLEMA 1. 1. [1.5 puntos] Obtener la ecuación de la recta tangente en el punto ( 2, 1) a la curva dada implícitamente por y 3 +3y 2 = x 4 3x 2.") PROBLEMA. ESCUELA UNIVERSITARIA POLITÉCNICA DE SEVILLA Ingeniería Técnica en Diseño Industrial Fundamentos Matemáticos de la Ingeniería Soluciones correspondientes a los problemas del Primer Parcial 7/8.
PROBLEMA. ESCUELA UNIVERSITARIA POLITÉCNICA DE SEVILLA Ingeniería Técnica en Diseño Industrial Fundamentos Matemáticos de la Ingeniería Soluciones correspondientes a los problemas del Primer Parcial 7/8.
Características de funciones que son inversas de otras
 Características de funciones que son inversas de otras Si f es una función inyectiva, llamamos función inversa de f y se representa por f 1 al conjunto. f 1 = a, b b, a f} Es decir, f 1 (x, y) = { x =
Características de funciones que son inversas de otras Si f es una función inyectiva, llamamos función inversa de f y se representa por f 1 al conjunto. f 1 = a, b b, a f} Es decir, f 1 (x, y) = { x =